Моделирование нейронных систем управления
реклама

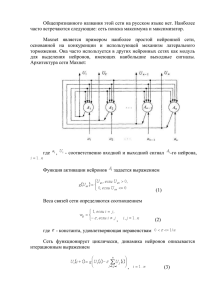
6Ю УДК 519.7 Е.И. Юревич, С.П. Романов, А.В. Бахшиев, И.М. Заболоцкий, А.М. Корсаков ЦНИИ РТК, г. Санкт-Петербург, Россия Авторы анализируют проблемы обработки информации и создание систем управления динамическими объектами, по своей структуре и функциям подобных нервной системе живых организмов. В настоящее время большое внимание уделяют проблемам обработки информации и созданию систем управления динамическими объектами, по своей структуре и функциям подобных нервной системе живых организмов. Несмотря на прогресс в развитии вычислительной техники, нервная система живых организмов остаётся непревзойденным инструментом восприятия, преобразования и анализа сигналов, обеспечивающим адаптивное поведение организмов в окружающей среде. Хотя выявлены основные связи и организация системы управления движениями, принципы передачи сигналов и их обработка в нейронных сетях мозга, а также принципы формирования управляющих команд на исполнительные органы остаются гипотетическими. Искусственные однородные сети отводят нейрону функцию сумматора входных сигналов и лишь в общих чертах соответствуют прототипам. Аналоги нейронов, передающие и преобразующие импульсные потоки как биологические нейроны, открывают возможность раскрытия механизмов переработки информации в нервной системе и могут стать обоснованием применения принципов структурной организации нейронов и выполняемых ими функций в сети при построении технических систем управления, в частности, движениями роботов-манипуляторов. Создание «элементной базы» из аналогов нейронов, мышц и рецепторных систем как блоков программного обеспечения способствовало бы прогрессу такого направления исследований. Основное требование к компьютерному аналогу нейрона состоит в сохранении принципов передачи и преобразования сигналов в импульсной форме. Импульсы (длительность ~1 мс) распространяются с конечной скоростью по аксонам нейронов без затухания. Нейрон суммирует пространственно-временное изменение проводимости под активными синапсами мембраны. Механизм создания внутриклеточного потенциала представлен системой пар RC-цепочек, в общем случае с разными постоянными времени. Подключенные к источникам разной полярности, они создают отрицательный и положительный потенциалы, в сумме определяющие внутриклеточный потенциал нейрона. Синапсы, подключенные к RC-цепочкам через ключи, изменяют сопротивление в цепи этих насосных механизмов и являются тормозными или возбуждающими в зависимости от снижения положительного или отрицательного потенциала по 752 «Искусственный интеллект» 4’2002 Моделирование нейронных систем… 6Ю типу шунтирования. Каждый дендрит, или участок тела нейрона, представлен парой RC-цепочек с группами синапсов, количество которых неограничено и определяется только структурой связей нейрона в сети. Если в результате активации входов внутриклеточный потенциал превысит значение порога, определённого потенциалом низкопороговой зоной, то нейрон генерирует импульс, распространяющийся далее по сети без затухания к другим нейронам или эффекторному (управляемому) звену. Если представить серию импульсов функцией U=U(t), обозначая постоянную времени синаптической передачи через τ1(U), имеющей значения T1 для активного и T2 для неактивного входа, а реакцию синапса как апериодического звена на последовательность входных импульсов – через X, то, с учётом веса RS синаптического входа, эффективность G, имеющую размерность проводимости, можно найти из решения системы уравнений: X U, τ1X Т1 , U 0, .....п.... ...τ 1 T2 , U 0. G X. RC Обозначив значения источников напряжения, характеризующих активность насосной функции ионных каналов при формировании внутриклеточного потенциала нейрона как EC, со знаками + или – в зависимости от направления движения ионов и введя сопротивление RC и емкость CC мембраны нейрона и постоянную времени τ2(t) возбуждённой мембраны, изменение внутриклеточного потенциала Y=Y(t) в зависимости от проводимости G влияния синапсов можно найти из решения следующей системы уравнений: 2Y (1 Rc G 2 )Y Ec , Cc 2 , 1 G 2 Rc где постоянная времени τ2(t)=T’=RCC меняется в зависимости от количества активных в каждый момент синаптических входов. Изменение внутриклеточного потенциала P(t)=Σ(Yi++Yi-) в каждый момент определяется через алгебраическую сумму Y=Y(t) от возбуждающих (+) и тормозных (–) входов. Сопротивление R в постоянной времени T`=RCC вычисляем как сумму проводимостей активных в каждый момент возбуждающих и тормозных входов по формуле: 1 1 1 ... 1 1 , R R1 R2 Rn RC где R1, R2, … , Rn – сопротивления выходов активных синапсов, подключаемые к RC-цепочкам механизма формирования внутриклеточного потенциала, а RC – сопротивление мембраны нейрона. Выходные сигналы моделей механизмов активного транспорта ионов формируют внутриклеточный потенциал. Каждую пару таких структур можно рассматривать как модель дендрита, или участка мембраны тела клетки. Увеличение количества этих структур автоматически увеличивает размер «Штучний інтелект» 4’2002 753 Юревич Е.И., Романов С.П., Бахшиев А.В., Заболоцкий И.М., Корсаков А.М. 6Ю нейрона, что позволяет моделировать нейроны со сложной организацией синаптического и дендритного аппаратов. В общем случае модель нейрона k описывается системой 2 k (n m ) 3 дифференциальных уравнений j j j 1 первого порядка, где k – число дендритов модели, а nj и mj – количество соответственно возбуждающих и тормозных входов, подключённых к j-тому дендриту, или телу клетки. Программно реализуемая структурная организация элементов модели формирует конкретный вид нейрона и определяет его поведение, т.е. закономерность преобразования импульсных потоков в, соответствующей биологической сети. Адекватность реакций предлагаемой модели нейрона биологическому прототипу показана вычислительными экспериментами по исследованию поведения отдельного нейрона и при объединении нейронов в простые структуры. Примером таких структур служит широко распространённое в нервной системе соединение возбуждающего и тормозного нейронов по типу возвратного торможения, впервые изученное в физиологических экспериментах на спинальном уровне как взаимодействие мотонейрона и клетки Реншоу. Эти нейроны отличаются размером, и клетка Реншоу, относящаяся к небольшим нейронам, генерирует характерные пачки импульсов (рис. 1) в ответ на один разряд, приходящий на её вход по возвратной цепи от мотонейрона. Рис. 1. Представление сигналов в модели естественной нейронной сети: вверху калибровка – 10 мс; 1 – возбуждающий сигнал на входе мотонейрона; 2 и 3 – внутриклеточные потенциалы соответственно мотонейрона и клетки Реншоу; 4 – разряды клетки Реншоу; 5 – импульсы на выходе мотонейрона Особенностью передачи сигналов в кольцевых структурах является их динамическая устойчивость в широком диапазоне входных воздействий независимо от вида нейронов, включённых в кольцевую цепь. Если в кольцевой цепи стоит тормозный нейрон, то активность в такой структуре поддерживается при внешнем возбуждении кольца. В кольцевой цепи из возбуждающих нейронов циклическая активность может поддерживаться после прекращения внешнего для кольца воздействия. Особенностью регуляции движений в биологической системе является широкое использование обратных связей от афферентных (рецепторных) систем на всех уровнях управления. Необходимость их использования при выполнении движений была показана Н.А. Бернштейном. Обратные связи от рецепторов мышцы к собственным мотонейронам образуют гомеостатический механизм поддержания усилия мышцей и способствуют превращению нестабильного локомоторного аппарата в управляемую для высших центров систему. Это первый контур регуляции от собственных рецепторов мышц, замыкаемый на мотонейроны, управляющие мышцами подвижного звена конечности. Второй контур образуется от тактильных, болевых и других рецепторных образований в 754 «Искусственный интеллект» 4’2002 Моделирование нейронных систем… 6Ю тканях этого же подвижного звена через сеть интернейронов. Можно образовать третий контур регуляции, использующий сигналы, в частности, от вестибулярного аппарата. В системе управления движениями человека насчитывают шесть важнейших моторных трактов, оканчивающихся на вставочных нейронах спинного мозга. Сенсорных трактов, несущих различную информацию о состоянии локомоторного аппарата, гораздо больше. Контур управления движениями может быть образован и через внешнее окружение. Предполагая использовать зрительный канал связи в нашей модели регуляции движений и используя импульсные потоки как способ передачи сигналов, мы преобразуем на предложенных аналогах нейронов матричное изображение на сетчатке в последовательности импульсов, распространяющиеся по множеству параллельных путей. В этом случае одна из поставленных задач исследования заключается в выделении, оценке и использовании информационных признаков в паттернах импульсных сигналов для формирования управляющих сигналов к мотонейронам. Каждый контур представляет гомеостатический механизм многопараметрического регулирования и является, по существу, контуром автоматического управления. Переход управления на более высокий уровень сопровождается автоматическим блокированием контура обратной связи на более низком уровне, обеспечиваемом соответствующей организацией сети. Такая схема может быть воспроизведена на основе предлагаемых моделей нейронов. Однако следует отметить, что возможности вычислительной техники ограничены и не позволяют вести моделирование в реальном масштабе времени из-за прогрессивного возрастания расчётного времени при увеличении количества элементов управляющей нейронной сети. The problems of information processing and creation of dynamic abject management systems structurally and functionally similar to the human nervous system. Статья поступила в редакцию 27.06.02. «Штучний інтелект» 4’2002 755