ГРУЗОПОДЪЁМНОЕ СРЕДСТВО
реклама

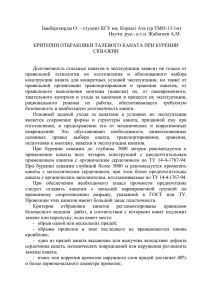
***** ИЗВЕСТИЯ ***** № 4 (12), 2008 НИЖНЕВОЛЖСКОГО АГРОУНИВЕРСИТЕТСКОГО КОМПЛЕКСА АГРОПРОМЫШЛЕННАЯ ИНЖЕНЕРИЯ УДК 621.869 ГРУЗОПОДЪЁМНОЕ СРЕДСТВО GRUZOPOD'YOMNYE FACILITY Н.В. Кривельская, кандидат технических наук, доцент кафедры «Сопротивление материалов и детали машин» ФГОУ ВПО Волгоградская государственная сельскохозяйственная академия N. V. Kriveliskaya Volgograd state agricultural academy Рассматривается возможность использования в сельском хозяйстве разработанного (запатентованного) грузоподъёмного средства-манипулятора. It is Considered possibility of the use designed (patented) gruzopod'yomnye facility-a manipulator in agricultures. Ключевые слова: манипулятор, шарнирно-стержневые манипуляционные системы, грузоподъемное средство, гидроцилиндры, канат, горизонтальный брус. В сельском хозяйстве могут быть использованы в качестве мобильных грузоподъёмных средств, шарнирно-стержневые манипуляционные системы. Среди ряда разработок грузоподъёмных средств сельскохозяйственного назначения особое место отводят манипуляционным системам. Предлагаемый (запатентованный) к внедрению манипулятор относится к грузоподъёмной технике сельскохозяйственного назначения. Манипулятор содержит плоское основание с кронштейнами навески и выдвижными опорами. На основании закреплена с возможностью поворота вокруг его оси опорноповоротная колонка со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком. На основании смонтированы дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки в виде L-образной балки. Её горизонтальный брус ориентирован в сторону проушин попарно установленных силовых гидроцилиндров стрелы. Нижний срез плоского основания снабжен ортогонально установленной дополнительной балкой. Удаленный конец этой балки направлен в сторону кронштейнов навески. Удаленные концы горизонтального бруса и дополнительной балки кинематически связаны механизмом поворота колонки. Механизм поворота снабжен двуплечим рычагом. Ось рычага совмещена с вертикальной осью поворота колонки. Штоковые и бесштоковые полости дополнительных гидроцилиндров перекрестно гидравлически сообщены между собой. Указанные гидроцилиндры установлены разнонаправленно и соединены с ним штоками. Основание одного из гидроцилиндров размещено на горизонтальном брусе L-образной балки. Основание другого гидроцилиндра смонтировано на дополнительной балке плоского основания. Грузозахватный крюк с концом рукояти кинематически связан канатом. Верхний и нижний концы каната зафиксированы блокираторами с образованием петель. Нижняя петля каната установлена с охватом на блоке грузозахватного крюка. Блок размещен шарнирно на оси над траверсой грузозахватного крюка в Н-образном кронштейне. Верхняя петля каната с охватом размещена на основании и на конце штока силового гидроцилиндра и заблокирована на конце его штока. Каждый блокиратор концов каната на его ветви выполнен в виде сопрягаемых резьбовыми участками внешнего и внутреннего дисков с осевыми отверстиями. Внутренняя торцевая поверхность внутреннего диска и сопрягаемая с нею внутренняя торцевая поверхность внешнего диска образованы вращением ветвей ***** ИЗВЕСТИЯ ***** № 4 (12), 2008 НИЖНЕВОЛЖСКОГО АГРОУНИВЕРСИТЕТСКОГО КОМПЛЕКСА синусоиды, ось абсциссы которой наклонена к оси симметрии дисков. В диаметральной плоскости внутреннего диска на его периферийной части выполнены канавки для укладки и фиксации ветвей каната. Глубина и ширина канавок равна диаметру каната. Осевое отверстие внутреннего диска выполнено резьбовым и сопряжено с концом штока силового гидроцилиндра. Параллельно резьбовому осевому отверстию выполнена пара отверстий под специальный монтажный ключ. На внешней торцевой части внешнего диска выполнен прилив в виде многогранника под размер зева рожкового ключа. Дугообразная часть верхней ветви каната на основании силового гидроцилиндра размещена с помощью направляющей и опоры. Рис. 1. Общий вид манипулятора Учитывая оригинальность конструкторской разработки манипулятора, имеем за счет «чистого» подъема и опускания грузозахватного крюка на конце рукояти, высокое качество погрузочно-разгрузочных работ. Библиографический список 1. Патент 2305638 Российская Федерация, С1. МПК7 В60 Р1/54. Манипулятор / Салдаев А.М., Кривельская Н.В. (RU). – Заявка №20006112087/11; заявлено 11.04.2006; опубл. 10.09.2007, Бюл. № 25. 2. Патент 2158707 Российская Федерация, С1. МПК7 В60 Р1/54, A 01 D 90/02. Манипулятор / Кузнецов Н.Г., Салдаев А.М., Салдаев Г.А., Рогачев А.Ф. (RU). – Заявка №99104419/13; заявлено 09.03.1999; опубл. 27.10.2000, Бюл. № 30 // Изобретения. – 2000. – № 30.