PDF, версия от 11.12.2015
реклама

Лычёв С.А., Левитин А.Л.
те
ла
Нелинейная механика деформируемого твёрдого тела
ит
ин
Содержание
ёр
до
А
го
.Л
.
ВЕРСИЯ от 11.12.2015
2
ев
тв
1 Описание движение тела. Деформации
Тела . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2
Движение, деформация, координаты . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.3
Полярное разложение, разложение Коши . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.4
Меры деформаций . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
о
ог
11
.1
2.
20
15
ор
ми
ру
ем
С
2
5
Конечные деформации . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.4.2
Малые деформации . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
че
в
1.4.1
Скорости деформаций . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Л
ы
де
Я
ф
2 Масса
ВЕ
РС
И
1.5
.А
.,
Л
1.1
ха
ни
ка
3 Термодинамический базис и отклик тела
6
7
8
Отклик тела на деформацию . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
3.2
Предположения, позволяющие упростить функционал отклика . . . . . . . . . . . . . . . . . . . . .
9
ме
4 Напряжения
АЯ
3.1
Гипотезы, определяющие напряжения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2
Меры напряжений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3
Напряжения при малых деформациях . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4
Гиперупругость, упругий потенциал, упругие напряжения . . . . . . . . . . . . . . . . . . . . . . . .
П
РЕ
Д
ВА
РИ
ТЕ
на
я
ин
ей
ел
Н
Л
ЬН
4.1
1
10
10
11
12
12
2
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
А
1.1. Тела
го
.Л
.
те
ла
1. Описание движение тела. Деформации
ёр
до
∙ Тело [body] B — топологическое пространство, элементами которого являются материальные точки.
ит
ин
Инфо: Топологическое пространство: если точка 𝑎 ∈ B, то ∃𝑉 (𝑎) : 𝑉 (𝑎) ∈ B, где 𝑉 (𝑎) — окрестность 𝑎.
∙ Будем рассматривать тела, являющимися гладкими многообразиями.
ев
тв
∙ 𝜙 — конфигурация (отображение тела из материального пространства в физическое пространство):
о
.А
.,
Л
𝜙 : B −→ 𝜙(B).
ог
∙ 𝜙 — вложение, т.е. 𝜙 и 𝜙′ — непрерывны (конфигурация и её первая производная).
ор
ми
ру
ем
Инфо: материальное и физическое пространства.
11
.1
2.
20
15
че
в
С
∘ (физическое) пространство [spatial] — пространство, в котором мы наблюдаем объекты. Обычно мы полагаем, что
нас окружает эвклидово трёхмерное пространство. Однако, бывает удобно использовать и другие пространства, например, четырёхмерное пространство Минковского.
∘ материальное пространство [material] — тело и подтела.
∘ отсчётная конфигурация [reference] — конфигурация тела в физическом пространстве, в котором наблюдаемое тело
может быть представлено в исходном состоянии (обычно выбирается состояние свободное от напряжений, если есть).
Л
ы
Инфо: образ тела в физическом пространстве является регионом , т.е.:
ВЕ
РС
И
де
Я
ф
1. либо спрямляемой кривой (предел последовательности ломаных),
2. либо квадрируемой поверхностью,
3. либо кубируемым объёмом.
ха
ни
ка
1.2. Движение, деформация, координаты
∙ 𝒦𝑅 = 𝜙𝑅 (B) — образ отсчётной [reference] конфигурации;
АЯ
∙ 𝒦𝑡 = 𝜙𝑡 (B) — образ актуальной (текущей) конфигурации (в текущий момент времени 𝑡);
Л
ЬН
ме
∙ X — положение точки в отсчётной конфигурации (материальная/лагранжева координата [material/Lagrangian]);
на
я
∙ x — положение точки в акутальной конфигурации (физическая/эйлерова координата [physical/Eulerian]);
ТЕ
∙ 𝑑X — приращение в отсчётных координатах;
ин
ей
∙ 𝑑x — приращение в актуальных координатах;
РИ
Инфо: Далее величины относящиеся к отсчётной конфигурации будем обозначать либо с индексом
𝑅,
либо заглавными бук-
Д
ВА
ел
вами, а относящиеся к актуальной конфигурации — индексом 𝑡 , либо строчными буквами.
Н
∙ x − X = u = U — векторное поле смещений [displacements], которые для удобства будем различать в зависимости
П
РЕ
аргумента функции
∘ U(X, 𝑡) = x(X) − X — функция отсчетных координат X ;
∘ u(x, 𝑡) = x − X(x) — функция актуальных координат x ;
Инфо: u(x) и U(X) разные функции, но при x = x(X) значения функций совпадают: u(x) = U(X).
∙ движение [motion] — изменение положения точки с течением времени:
x = 𝜒(X, 𝑡)
Инфо: функция 𝜒(. . .) является диффеоморфизмом порядка 1 , т.е. сама функция 𝜒 и обратная 𝜒−1 дифференцируемы и
нам достаточно 1ого порядка дифференцируемости.
3
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
.Л
.
∘ R ⊃ 𝐼 = (𝑡1 , 𝑡2 ) — 𝐼 интервал наблюдения (открытый интервал множества действительных чисел);
А
B
го
∘ 𝑀 : 𝐼 ∈ 𝑡 ↦→ 𝜙𝑡 — движение;
∀𝜀 > 0 ∃𝛿 : ∀(𝑡 − 1 − 𝑡2 ) < 𝛿 max |𝜙𝑡1 − 𝜙𝑡2 | < 𝜀
те
ла
Инфо: Движение — кривая (область определения — интервал наблюдения, область значений — множество конфигураций
[Марсден]
ит
ин
ёр
до
∙ процесс деформации тела — изменение взаимного положения точек внутри тела;
∙ деформация 𝜆 [deformation] — функция, отображающая образ отсчётной конфигурации в образ актуальной
𝜆 = 𝜙𝑡 ∘ 𝜙−1
𝑅 ,
𝜆 : X ↦→ x
⇔
⎧
⎪
⎨𝜆(X) = X + U(X)
тв
ев
АЯ
ха
ни
ка
ВЕ
РС
И
де
Я
ф
Л
ы
че
в
С
ор
ми
ру
ем
ог
о
.А
.,
Л
⎪
⎩𝜆(x) = X(x) + u(x)
11
.1
2.
20
15
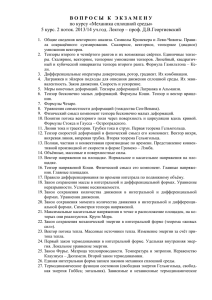
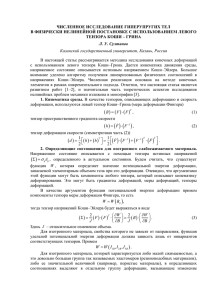
𝒦𝑅 ↦→ 𝒦𝑡
Деформация тела
ме
Движение тела
Л
ЬН
Источник рисунков: https://en.wikipedia.org/wiki/Finite_strain_theory
на
я
∙ F — градиент деформации [deformation gradient] — линеаризация функции 𝜆 в окрестности материальной
ТЕ
⃒
⃒
𝜕𝑥𝑖 ⃒⃒
𝜕x ⃒⃒
=
e𝑖 ⊗ e𝐽
𝜕X ⃒𝑡 в декартовой системе 𝜕𝑋 𝐽 ⃒𝑡
РИ
F = ∇𝜆 =
Д
ВА
координат
x(X + 𝑑X, 𝑡) = x(X, 𝑡) +
Н
ел
ин
ей
точки X (линейный оператор, двухточечный тензор — связывает отсчётную X и текущую x позиции):
F(X, 𝑡)·𝑑X
⏟
⏞
+𝑜(‖𝑑X‖)
нотация по Трусделлу
П
РЕ
x(X + 𝑑X, 𝑡) = x(X, 𝑡) + 𝑑X·F(X, 𝑡) +𝑜(‖𝑑X‖)
⏟
⏞
нотация Гиббса
∙ Объём [volume]:
𝜒
∘ Объём в отсчётной и актуальной конфигурация: 𝑉𝑅 ⊂ 𝒦𝑅 −→ 𝑉𝑡 ⊂ 𝒦𝑡
∘ Изменение объёма: 𝑑𝑉𝑡 = 𝐽F 𝑑𝑉𝑅
∘ 𝐽F = det F > 0 — в процессе деформирования сохраняется ориентация координатной системы («хиральность»)
𝐽F — число ассоциированное с точкой
если det F = 0 — объём вырождается в точку
если det F < 0 — объём выворачивается.
⎫
⎪
⎬
⇒
det F > 0
⎪
⎭
∙ 𝑑𝑎 n = 𝐽F 𝑑𝐴 F−T ·N — преобразование площади (соотношение Нансона) [Nanson’s relation],
где 𝐽F = det F, 𝑑𝐴, N, 𝑑𝑎, n — площадь и внешняя нормаль в отсчетной и актуальной конфигурациях.
4
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
те
ла
∙ F−1 — обратный градиент деформаций (существует, т.к. 𝐽F = det F > 0)
F−1 ·F = I𝑅 = e𝑃 ⊗e𝑃 — в отсчётной конфигурации;
.Л
.
F·F−1 = I = e𝑝 ⊗e𝑝 — в актуальной конфигурации;
А
го
∙ Для рассмотрения криволинейных координат в евклидовом пространстве введем набла-оператор
∇ = e𝑘
𝜕
,
𝜕x𝑘
ёр
до
𝜕
;
𝜕X𝑘
ит
ин
∇𝑅 = e𝑘𝑅
т.е. ∇𝑅 = F∇
ев
тв
∙ Удобно предполагать, что отсчетные координаты X декартовы трансформируются в криволинейные коор(︁
)︁
∇· 𝐽F −1 F = 0
⎪
⎩F−1 = I − h, h = ∇𝑅 u
ВЕ
РС
И
де
⎪
⎩x = X + u(x, 𝑡)
11
.1
2.
20
15
H = ∇𝑅 U
Я
⃒
⃒
⃒
𝜕x ⃒⃒
𝜕(X + U) ⃒⃒
𝜕U ⃒⃒
F=
=
=
I
+
⃒
𝜕X ⃒𝑡
𝜕X
𝜕X ⃒𝑡
𝑡
⎧
⎧
⎪
⎪
⎨x = X + U(X, 𝑡)
⎨F = I + H,
ф
че
в
С
выделим U, u — поле смещений
Л
ы
о
ор
ми
ру
ем
∙ Перемещения и градиент деформаций
x = 𝜒(X, 𝑡),
(︁
)︁
∇𝑅 · 𝐽F F−1 = 0
и
ог
.А
.,
Л
динаты x
F
АЯ
(x, 𝑡),
⃒
𝜕𝜒−1 ⃒⃒
=
⃒
𝜕x ⃒
Л
ЬН
X=𝜒
−1
𝑡
ТЕ
— материальная скорость [material velocity].
ин
ей
X
РИ
⃒
𝜕𝜒−1 ⃒⃒
∙ V=
⃒
𝜕𝑡 ⃒
−1
на
я
ме
ха
ни
ка
⃒
𝜕x(X, 𝑡) ⃒⃒
∙ v=
— физическая (эйлерова) скорость [physical/Eulerian velocity field];
𝜕𝑡 ⃒X
∙ 𝜒−1 (x, 𝑡) — обратное движение (обращение только относительно x, 𝑡 — параметр)
F = R·U = V·R
Д
ВА
Н
ел
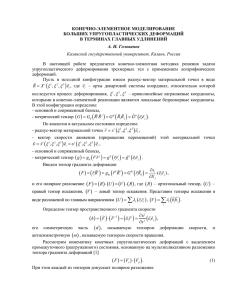
1.3. Полярное разложение, разложение Коши [polar decomposition]
П
РЕ
∘ R — тензор вращения; RT = R−1 (ортогональный) ⇒ det R = ±1 (т.к. det F > 0 ⇒ det R = 1)
∘ U = U(X, 𝑡) — тензор искажений [stretch tensor] в лагранжевом описании (правый тензор искажений),
∘ V = V(x, 𝑡) — тензор искажений [stretch tensor] в эйлеровом описании (левый тензор искажений),
Тензора искажений симметрические: U = UT и V = VT .
5
о
ог
Полярное разложение градиента деформаций
11
.1
2.
20
15
ор
ми
ру
ем
.А
.,
Л
ев
тв
ит
ин
ёр
до
А
го
.Л
.
те
ла
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
С
Источник рисунка: https://en.wikipedia.org/wiki/Finite_strain_theory
че
в
1.4. Меры деформаций [strain measures]
ВЕ
РС
И
де
Я
ф
Л
ы
Градиент деформаций F содержит информацию о изменении расстояний между точками и повороте элементарного объёма, т.е.
изменяется и при повороте системы координат, что противоречит принципу материальной индифферентности (объективности).
Построим меры деформаций, исключив вращение. Наиболее простой способ — выделить симметричную часть.
ха
ни
ка
1.4.1. Конечные деформации [finite strains]
ме
C(X, 𝑡) определен в 𝒦𝑅 :
АЯ
∙ Правый тензор деформаций Коши–Грина [right Cauchy–Green strain tensor] C = FT ·F = U2
или в перемещениях:
(︀
)︀ (︀
)︀
C = FT ·F = I + ∇𝑅 U T · I + ∇𝑅 U = I + ∇𝑅 U + (∇𝑅 U) T + ∇𝑅 UT ·∇𝑅 U
ТЕ
𝐽F = (det C)1/2 ,
𝐽F−1 = (det C−1 )1/2
РИ
ин
ей
на
я
Л
ЬН
)︂
(︂
𝜕𝑥𝑚
𝜕x
𝜕𝑥𝑚
𝜕x T
T
=
=
,
F
=
e
⊗e
e𝑁 ⊗e𝑚
𝑚
𝑁
𝜕X
𝜕𝑋 𝑁
𝜕X
𝜕𝑋 𝑁
)︂
(︂
(︂
)︂
)︀
(︀
)︀
𝜕𝑥𝑝
𝜕𝑥𝑚 𝜕𝑥𝑚 (︀
𝜕𝑥𝑚
e𝑁 ⊗e𝑚 ·
e𝑝 ⊗e𝑄 =
e𝑁 ⊗e𝑄 = 𝐶 𝑁 𝑄 e𝑁 ⊗e𝑄 = C
FT ·F =
𝜕𝑋 𝑁
𝜕𝑋 𝑄
𝜕𝑋 𝑁 𝜕𝑋 𝑄
F=
ел
Д
ВА
∙ Тензор деформаций Пиола [Piola finite strain tensor] C−1 = F−1 ·(F−1 )T , где C−1 ·C = I𝑅
Н
∙ Связь длин векторов в 𝒦𝑅 и 𝒦𝑡 : 𝑑𝑆 = |𝑑X|, 𝑑𝑠 = |𝑑x|
П
РЕ
теорема Пифагора в евклидовом пространстве:
⎧
⎪
⎨𝑑𝑆 2 = 𝛿𝐾𝐿 𝑑𝑋 𝐾 𝑑𝑋 𝐿
⎧
⎪
⎨𝑑𝑆 2 = 𝑐𝑖𝑗 𝑑𝑥𝑖 𝑑𝑥𝑗
⎧
⎪
⎨𝑑X2 = 𝑑x·c·𝑑x
⎪
⎩𝑑𝑠2 = 𝛿𝑖𝑗 𝑑𝑥𝑖 𝑑𝑥𝑗
⎪
⎩𝑑𝑠2 = 𝐶𝐾𝐿 𝑑𝑋 𝐾 𝑑𝑋 𝐿
⎪
⎩𝑑x2 = 𝑑X·C·𝑑X
∙ Тензор деформаций Фингера [Finger’s finite strain tensor] c = (F−1 )T ·F−1
∙ Изменение длин при деформациях
𝑑𝑠2 − 𝑑𝑆 2 = 2 𝐸𝐾𝐿 𝑑𝑋 𝐾 𝑑𝑋 𝐿
𝑑x2 − 𝑑X2 = 2 𝑑X·E·𝑑X
𝑑𝑠2 − 𝑑𝑆 2 = 2 ℰ𝑖𝑗 𝑑𝑥𝑖 𝑑𝑥𝑗
𝑑x2 − 𝑑X2 = 2 𝑑x·ℰ ·𝑑x
∙ Тензор деформаций Лагранжа [Lagrangian strain tensor] E(X, 𝑡) = 12 (C − I𝑅 )
6
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
ℰ = (F−1 )⊤ ·E·F−1
⇒E=0
⎩c = I
⇒ℰ=0
ит
ин
Условие жёсткого движения: 𝑑𝑠 = 𝑑𝑆
⎧
⎨C = I 𝑅
⇒
ёр
до
А
го
.Л
.
E = F⊤ ·ℰ ·F,
те
ла
∙ Тензор деформаций Эйлера [Eulerian strain tensor] ℰ(x, 𝑡) = 12 (I − c)
ев
тв
∙ Тензор деформаций Альманси = левый тензор Коши–Грина B = c−1 = F·FT = V2
)︂ (︂
)︂
𝜕𝑥𝑝
𝜕𝑥𝑚 𝜕𝑥𝑝
𝜕𝑥𝑚
·
=
e
⊗e
e
⊗e
(e𝑚 ⊗e𝑝 ) = 𝐵 𝑚𝑝 (e𝑚 ⊗e𝑝 ) = B
𝑚
𝑝
𝑁
𝑄
𝜕𝑋 𝑁
𝜕𝑋 𝑄
𝜕𝑋 𝑁 𝜕𝑋 𝑁
ог
11
.1
2.
20
15
(︂
ор
ми
ру
ем
F·FT =
о
.А
.,
Л
B(x, 𝑡) определен в 𝒦𝑡 :
С
∙ Логарифмические меры деформаций — мера Генки
ln C
в
1
2
че
∘ EH =
Я
ф
Л
ы
∘ ℰ H = − 21 ln c
T = R−1 , UT = U
R
)︁ (︁
)︁
(︁
C = F ·F = R·U T · R·U = UT ·RT ·R·U
(︁
)︁ (︁
)︁
B = F·FT = V·R · V·R T = V·R·RT ·VT
T
I
⏞ ⏟
U· R−1 ·R·U = U2
V·R·R−1 ·V = V2
⏟ ⏞
⇒
I
АЯ
ме
ТЕ
на
я
F = I + H = I + 𝑜(‖I‖),
⎧
1
⎪
⎪
E = ℰ = (H + HT )
⎪
⎪
2
⎨
РИ
ин
ей
∇𝑅 = ∇,
H=h
⎫
1
⎬
(H + HT + HT ·H)⎪
2
T
⇒
C−1 = I𝑅 − (H + HT )
1
⎪ C = I𝑅 + (H + H ),
⎪
⎪
⎪
ℰ = (h + hT − hT ·h) ⎭
⎪
⎩ U = V = I + (H + HT ), R = I + (H − HT )
2
𝑅
𝑅
П
РЕ
E=
Д
ВА
ел
Н
⏟ =⏞
RT = R−1 , VT = V
1.4.2. Малые деформации [infinitesimal (small) strains]
|F| = (F : F)1/2 = 𝑜(1),
⏞ ⏟
=
Л
ЬН
⇔
B = V2 ⎭
ха
ни
ка
⎫
C = U2 ⎬
ВЕ
РС
И
де
Пример 1.1 . Связь градиента деформаций, тензора искажений и мер деформаций:
)︀
1 (︀
∇u + (∇u)T
2
)︀
1 (︀
тензор вращений: 𝜔 =
∇u − (∇u)T
2
тензор малых деформаций: 𝜀 =
1.5. Скорости деформаций [strain rates]
∙ градиент скорости деформаций [(physical) velocity gradient] L = (∇v)
∼ E, ℰ
∼ (R − I)
⎧
⎨U = C1/2
⎩V = B1/2
7
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
⃒
𝜕 −1 ⃒⃒
F ⃒ = −F·L,
𝜕𝑡
X
⎫
⎪
v = F·V = 0 ⎪
⎪
⎬
⃒
𝜕 −1 ⃒⃒
F ⃒ = M·F−1
𝜕𝑡
x
⃒
⃒
⎫
𝜕 ⃒⃒
𝜕 ⃒⃒
⎪
=
+ v·∇⎪
⎪
⎬
𝜕𝑡 ⃒X
𝜕𝑡 ⃒x
⃒
⃒
,
⎪
⎪
𝜕 ⃒⃒
𝜕 ⃒⃒
⎪
⎪
V + F−1 ·v = 0⎪
=
+ v·∇𝑅 ⎪
⎭
⎭
⃒
⃒
𝜕𝑡 x
𝜕𝑡 X
ев
11
.1
2.
20
15
ор
ми
ру
ем
ог
о
.А
.,
Л
ёр
до
L = Ḟ·F−1
Ḟ = L·F,
∙ Скорость изменения тензоров деформаций [Eulerian rate of strain]
⃒
𝜕E ⃒
⃒ ·F−1 ,
·
𝜕𝑡 ⃒X
⃒
𝜕E ⃒
⃒ = FT ·D·F−1
𝜕𝑡 ⃒X
ф
)︀
де
D= F
−1 T
)︀
∇v + (∇v)T
(︀
)︀
Ω = 12 ∇v − (∇v)T
L = D + Ω,
1
2
(︀
— деформация скорости
— спин
АЯ
ха
ни
ка
D=
Л
ЬН
ме
∙ Для малых деформаций (|F| = 𝑜(1)):
˙
D = 𝜀,
L = Ḟ = Ḣ,
Ω = 𝜔˙
ел
2. Масса [mass]
Д
ВА
РИ
ин
ей
ТЕ
на
я
Я
че
(︀
ВЕ
РС
И
в
С
⃒
𝜕 (︀ 2 )︀⃒⃒
𝑑𝑠 ⃒ = 2 𝑑x·D·𝑑x
𝜕𝑡
X
D — скорость деформации:
Л
ы
тв
ит
ин
А
го
.Л
.
⃒
𝜕 ⃒⃒
F⃒ = L·F,
𝜕𝑡 X
⃒
⎫
⃒
𝜕
⃒
⎪
(𝑑x)⃒ = L·𝑑x ⎪
⎪
⎬
𝜕𝑡
X
⃒
,
⃒
⎪
𝜕
⎪
(𝑑X)⃒⃒ = M·𝑑X⎪
⎭
𝜕𝑡
x
те
ла
∙ градиент материальной скорости [material velocity gradient] M = (∇𝑅 V)
Н
∙ 𝜌𝑅 , 𝜌𝑡 — массовая плотность [mass density] в отсчётной и актуальной конфигурациях;
𝜒
П
РЕ
∙ объём [volume]: 𝑉𝑅 ⊂ 𝒦𝑅 −→ 𝑉𝑡 ⊂ 𝒦𝑡
∙ изменение объёма: 𝑑𝑉𝑡 = 𝐽F 𝑑𝑉𝑅
∫︁
∙ масса:
𝑚(𝑉𝑅 ) = 𝜌𝑅 (X) 𝑑𝑉𝑅 ,
∫︁
𝑚(𝑉𝑡 ) =
𝑉𝑅
𝜌𝑡 (x, 𝑡) 𝑑𝑉𝑡
𝑉𝑡
Инфо: при наших условиях гладкости движения (диффеоморфизм) и гладкости 𝑉𝑅 интеграл
смысле Римана; в общих случаях — в смысле Лебега.
∫︀
𝑉𝑅
можно рассматривать в
Инфо: на этом этапе мы не предполагаем сохранение массы
∙ Закон сохранения массы: 𝑚(𝑉𝑅 ) = 𝑚(𝑉𝑡 )
=⇒
𝑑𝑉𝑡 =𝐽F 𝑑𝑉𝑅
𝜌𝑅 (X) = 𝜌𝑡 (x)𝐽F (здесь источниками массы пренебрегли)
8
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
.Л
.
те
ла
3. Термодинамический базис и отклик тела
∙ Термодинамические поля [thermodynamic fields] — наблюдаемые поля: деформация 𝜆, поле смещений
ит
ин
магнитного поля H и т.д.
ёр
до
А
го
U, поле напряжений T, температура 𝜃, энтропия 𝑆, напряжённость электрического поля E, напряжённость
∙ Термодинамический базис [thermodynamic basis] — упорядоченный набор независимых термодинамиче-
тв
ских полей, полностью описывающих термодинамическую систему.
ев
∙ Отклик [response] — реакция тела на внешние воздействия .
ог
о
.А
.,
Л
∙ Дескрипторы отклика 𝑅 [response descriptors] — упорядоченный набор остальных интересующих нас
ор
ми
ру
ем
термодинамических полей (не вошедших в термодинамический базис).
11
.1
2.
20
15
∙ Функционал отклика ℛ [response functional] — зависимость отклика от выбранного термодинамического
в
С
базиса (здесь функционал ставит в соответствие полям термодинамического базиса поля отклика).
Пример 3.1 . Рассмотрим некоторые возможные термодинамические базисы и соответствующие им отклики
отклик
{T, 𝑆}
ВЕ
РС
И
де
ха
ни
ка
3.1. Отклик тела на деформацию
Я
ф
Л
ы
{X, 𝜃}
че
базис
Рассмотрим самый простой случай, когда термодинамический базис составляет только деформация 𝜆 или
функция движения 𝜒.
АЯ
В общем случае нелинейный функционал R можно представить разложением в ряд Вольтерра–Фреше
на
я
Л
ЬН
ме
Инфо: Разложение в ряд Вольтерра–Фреше нелинейного функционала R от скалярной величины 𝑎:
∫︁ ∫︁
∫︁
∫︁
∫︁
𝑚
∏︁
1
1
R2𝑎 (𝜉1 , 𝜉2 ) 𝑏(𝜉1 ) 𝑏(𝜉2 ) 𝑑𝜉1 𝑑𝜉2 +
· · · R𝑚
R(𝑎 + 𝑏) = R(𝑎) + R1𝑎 (𝜉) 𝑏(𝜉) 𝑑𝜉 +
𝑏(𝜉𝑘 ) 𝑑𝜉𝑘 + 𝑅𝑚
𝑎 (𝜉1 , . . . , 𝜉𝑚 )
2!
𝑚!
𝑘=1
B B
B
B
B
⏟ ⏞
𝑚 раз
РИ
ин
ей
ТЕ
где 𝑅𝑚 — остаточный член, R1𝑎 — первая производная Фреше от∫︁ нелинейного функционала R является линейным функционалом
△
𝐷R(𝑎)𝑏 =
R1𝑎 (𝜉) 𝑏(𝜉) 𝑑𝜉
B
ел
Д
ВА
Вторая производная Фреше R2𝑎 — билинейный функционал
∫︁ ∫︁
△
𝐷2 R(𝑎)(𝑏1 , 𝑏2 ) =
R2𝑎 (𝜉1 , 𝜉2 )𝑏1 (𝜉1 )𝑏1 (𝜉2 ) 𝑑𝜉1 𝑑𝜉2
B B
П
РЕ
Н
Производная Фреше порядка 𝑚 — полилинейный функционал
∫︁ ∫︁
𝑚
∏︁
△
𝐷𝑚 R(𝑥)(𝑏1 , . . . , 𝑏𝑚 ) =
R𝑚
𝑏𝑘 (𝜉𝑘 ) 𝑑𝜉𝑘
𝑥 (𝜉1 , . . . , 𝜉𝑚 )
𝑘=1
B B
Разложение в ряд Вольтерра–Фреше нелинейного функционала R от векторной величины 𝜒:
∫︁ ∫︁
∫︁
1
R(𝜒 + 𝛿𝜒) = R(𝜒) + R𝜒 1 (𝜉) · 𝛿𝜒(𝜉) 𝑑𝜉 +
R𝜒 2 (𝜉1 , 𝜉2 ) : 𝛿𝜒(𝜉1 ) ⊗ 𝛿𝜒(𝜉2 ) 𝑑𝜉1 𝑑𝜉2 + . . .
2!
B
B B
+
1
𝑚!
∫︁
∫︁
···
B
⏟
B
R𝜒 𝑚 (𝜉1 , . . . , 𝜉𝑚 ) :(𝑚)
𝑚
⨂︁
𝛿𝜒(𝜉𝑘 ) 𝑑𝜉𝑘 + 𝑅𝑚
𝑘=1
⏞
𝑚 раз
Во многих случаях в разложении Вольтерра–Фреше можно считать, что влияние повторных интегралов
незначительно и получим упрощённый вид функционалов отклика:
∫︀
∙ Мгновенно реагирующая среда: 𝑅(X) = Ψ(𝜆𝜉 ) 𝑑𝜉,
B
∫︀∞ ∫︀
∙ Среда с памятью: 𝑅(X, 𝑡) =
−∞ B
Здесь Ψ — подынтегральное ядро.
Ψ(𝜒𝜉,𝑡 ) 𝑑𝜉 𝑑𝜏 .
9
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
те
ла
3.2. Предположения, позволяющие упростить функционал отклика
.Л
.
1. Принцип детерминизма [principle of determinism]: состояние системы в момент зависит только от пре-
ит
ин
−∞ B
ёр
до
А
го
дистории, а от будущего не зависит, т.е. для текущего момента времени
∫︀𝑡 ∫︀
среда с памятью: 𝑅(X, 𝑡) =
Ψ(𝜒𝜉,𝑡 ) 𝑑𝜉 𝑑𝜏 .
2. Принцип близкодействия [localization principle]: на состояние точки тела X влияет только её окрестность
тв
(позволяет избавиться от суммирования по всему объёму тела)
ев
∙ Мгновенно реагирующая среда
ог
о
.А
.,
Л
∘ 𝑅(X) = ℛ(𝜆X , ∇𝜆X , ∇∇𝜆X , . . . , ∇
⏟ . .⏞. ∇ 𝜆X ) – среда порядка 𝑛.
𝑛
11
.1
2.
20
15
ор
ми
ру
ем
∘ 𝑅(X) = ℛ(𝜆X , ∇𝜆X ).
С
∘ 𝑅(X) = ℛ(𝜆X , ∇𝜆X , ∇∇𝜆X ) – модель второго градиента.
ВЕ
РС
И
де
Я
ф
Л
ы
че
в
∙ Среда с памятью (реакция зависит от предистории процесса)
∫︀𝑡
∘ 𝑅(X, 𝑡) =
Ψ(𝑀 (𝜏 ), ∇𝑀 (𝜏 ), ∇∇𝑀 (𝜏 ), . . .) 𝑑𝜏
−∞
(︁
)︁
¨ (𝑡), ∇𝑀
¨ (𝑡), ∇∇𝑀
¨ (𝑡), . . .
𝑅(X, 𝑡) = ℛ 𝑀 (𝑡), ∇𝑀 (𝑡), ∇∇𝑀 (𝑡), . . . , 𝑀˙ (𝑡), ∇𝑀˙ (𝑡), ∇∇𝑀˙ (𝑡), . . . , 𝑀
ха
ни
ка
3. Принцип простоты материала [simple material]: учитываем только 1ый градиент в разложении Тейлора
(линеаризация)
ме
АЯ
∙ Мгновенно реагирующая среда: 𝑅(X) = ℛ(𝜆X , ∇𝜆X )
(︁
)︁
¨ (𝑡), ∇𝑀
¨ (𝑡), . . .
∙ Среда с памятью: 𝑅(X, 𝑡) = ℛ 𝑀 (𝑡), ∇𝑀 (𝑡), 𝑀˙ (𝑡), ∇𝑀˙ (𝑡), 𝑀
Л
ЬН
4. Принцип материальной индифферентности (объективности) [material indifference] отклик не дол-
на
я
жен зависеть от выбора системы координат, т.е. любого жёсткого движения
ТЕ
∙ исключим поступательное движение: 𝜆X и учитывая ∇𝜆X = F приходим 𝑅(X) = ℛ(𝜆X ) = ℛ(F)
где C = FT · F = U2 — правый тензор деформаций Коши–Грина, B = F · FT = V2 — тензор деформаций Альманси.
Инфо: записывая деформацию через векторное поле смещений 𝜆(X) = X+U(X) получим F = ∇𝜆 = ∇X +∇U = I+∇U,
⏟ ⏞
I
)︁ (︁
)︁
(︀
)︀
тогда
=B=F·
= I + ∇U · I + ∇U T = I + ∇U + (∇U)T + ∇U(∇U)T
итак отклик материала зависит от
)︁
(︁
𝑅(X) = ℛ ∇U + (∇U)T + ∇U(∇U)T
V2
FT
(︁
П
РЕ
Н
ел
Д
ВА
РИ
ин
ей
∙ исключим вращательное движение: из полярного разложения (разложения Коши) F = R · U = V · R
⎧
⎪
⎨𝑅(X) = ℛ(U) = ℛ̃(C)
и 𝑅(X) = ℛ(F) =⇒
⎪
⎩𝑅(X) = ℛ(V) = ℛ̃(B)
5. Свойство изотропии материала: функционал отклика ℛ не зависит от ориентации тела в пространстве,
тогда зависит только от инвариантов ∇U: R ∘ ℛ(∇U) = ℛ(R ∘ ∇U)
6. Гипотеза геометрической линеаризации: градиент перемещений мал ‖U‖ << 1 (пренебрегаем квадратами)
(︀
)︀
𝑅(X) = ℛ ∇U + (∇U)T
7. Отклик линейно зависит от материала
[︀
]︀
отклик материала — линейное отображение: 𝑅 = 𝐿 ∇U + (∇U)T
10
те
ла
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
ёр
до
ит
ин
(︁
)︁
𝜀 = ∇U + (∇U)T
[︁
]︁
𝑅 = 𝐿 ∇U + (∇U)T ,
го
А
Используя все введённые предположения видим:
.Л
.
Пример 3.2 . В технической механике отклик — изменение состояния тела, вызванные механическими напряжениями:
𝑅 = {𝜎}.
˜
𝑅 = 𝐿[𝜀],
тв
𝜎 = E:𝜀
(︂
E = 𝑎 I + 𝑏 I ⊗ I,
)︂
2𝜇 I + 𝜆 I ⊗ I : 𝜀,
𝜎 = 2𝜇 𝜀 + 𝜆 I(I : 𝜀)
че
в
4. Напряжения [Stresses]
11
.1
2.
20
15
С
ор
ми
ру
ем
𝜎=
ог
.А
.,
Л
Для изотропного тела:
о
ев
в силу симметрии 𝜀 и симметрии 𝜎 тензор E содержит 21 независимую компоненту в общем случае.
Я
ф
Л
ы
4.1. Гипотезы, определяющие напряжения
ха
ни
ка
внутренность действием полей.
ВЕ
РС
И
де
1. Принцип сечения: можно изъять из тела B контрольный объём 𝑉 и заменить действие внешнего на
2. Принцип близкодействия: реакция в бесконечно малой окрестности точки зависит только от этой
окрестности.
АЯ
Т.е. действие внешнего на внутреннее описывается только полями на границе контрольного объёма.
Л
ЬН
ме
3. Различные способы задания полей на границе:
на
я
а) внешние физические поля = поля распределённых поверхностных сил ⇒ классическая механика
континуума (напряжения — вектор силы, степени свободы — вектор трансляционный/перемещения);
ин
ей
ТЕ
б) внешние физические поля = поля распределённых поверхностных сил + поля поверхностных момен-
РИ
тов ⇒ теория типа Коссера (напряжения — вектор силы и момент, степени свободы — вектор
Д
ВА
трансляционный/смещения и вектор поворотов);
г) внешние физические поля = силовые поля + электромагнитные поля;
. . . и т.д. . . .
П
РЕ
Н
ел
в) внешние физические поля = силовые поля + температурные поля ⇒ термоупругость;
Далее ограничимся только 3а) классической механикой континуума.
4. Предположим, что
∘ локально (в окрестности каждой точки) границу 𝜕𝑉 объёма 𝑉 можно описать аналитически (например
функция 𝑓 (𝑞 1 , 𝑞 2 ) — двумерная поверхность, описывающая границу 𝜕𝑉 контрольного объёма 𝑉 ) и
функция 𝑓 ∈ 𝐶 𝑘 имеет достаточную гладкость,
∘ на этот участок поверхности действует поле напряжений: t — плотность поверхностных сил [traction].
Тогда, разлагая в ряд Тейлора, видим, что в общем случае поверхностная (контактная) сила зависит от
формы поверхности и её производных
(︃
)︃
𝜕𝑓
𝜕2𝑓
t = t(𝜕𝑉 ) = t 𝑓, 𝑘 ,
,...
𝜕𝑞 𝜕(𝑞 𝑘 )2
11
те
ла
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
Гипотеза Коши: плотность поверхностных (контактных) сил t зависит от формы границы контрольного
(︀
)︀
t = t p, n ,
ит
ин
или
ёр
до
А
(︂
)︂
𝜕𝑓
t = t 𝑓, 𝑘
𝜕𝑞
го
.Л
.
объёма 𝑓 и только её 1ой производной (нормали):
ев
Инфо: Далее все рассуждения будем приводить для точки, опуская явную запись p.
тв
где p — координата точки, n — нормаль к поверхности в этой точке p.
о
.А
.,
Л
Теорема Коши: t(p, n) — линейная зависимость по n ⇒ в каждой точке существует оператор T : n → t
ог
переводящий вектор нормали в векторную плотность контактных усилий.
в
С
T — тензор напряжений Коши.
11
.1
2.
20
15
ор
ми
ру
ем
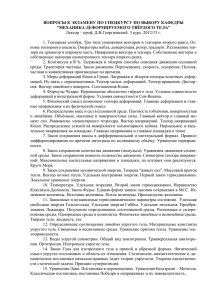
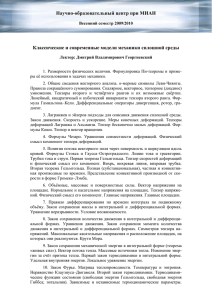
T — 2-форма (тензор отображающий вектор в векторную плотность);
Ω
тело
𝑑Γ0
𝑑Γ
элемент поверхности
N = n0
n
внешняя нормаль
f0
f
сила, действующая на поверхность
t0
t
плотность поверхностных сил [traction vector]
Л
ЬН
df
dΓ
ме
=
— плотность поверхностных сил;
на
я
Δ𝑓
ΔΓ→0 ΔΓ
АЯ
Ω0
Источник рисунка: https://en.wikipedia.org/wiki/Stress_measures
∙ t = lim
Я
актуальная
ВЕ
РС
И
отсчётная
ха
ни
ка
де
ф
Л
ы
че
4.2. Меры напряжений [stress measures]
∙ действующая в актуальной конфигурации сила, отнесённая к поверхности в актуальной конфигурации:
ин
ей
ТЕ
𝑑f = t 𝑑Γ = 𝜎 n 𝑑Γ,
РИ
𝜎 — тензор напряжений Коши (истинные напряжения) [Cauchy stress tensor (true stress)]
Д
ВА
(симметричный, пространственный);
ел
∙ действующая в актуальной конфигурации сила, отнесённая к поверхности в отсчётной конфигурации:
Н
𝑑f = t0 𝑑Γ0 = P n0 𝑑Γ0 ,
П
РЕ
P — первый тензор напряжений Пиола–Кирхгофа [first Piola–Kirchhoff stress tensor (PK1 stress)]
N = PT — номинальные напряжения (nominal stress)
(несимметричный, двухточечный);
∙ pull-back силы в актуальной конфигурации, отнесённая к поверхности в отсчётной конфигурации:
𝑑f 0 = F−1 ·𝑑f = F−1 ·t0 𝑑Γ0 = t0 𝑑Γ0 = S N 𝑑Γ0 ,
S — второй тензор напряжений Пиола–Кирхгофа [second Piola–Kirchhoff stress tensor (PK2 stress)]
(симметричный, материальный, отсчётный);
P = 𝐽 𝜎 F−T
𝜎=
1
𝐽
∙ 𝜏 = 𝐽𝜎 — Kirchhoff stress tensor
P FT
𝜎=
𝜏 = F S FT ,
ˆ = RT 𝜎 R — Corotational Cauchy Stress
∙ 𝜎
ˆ = 𝐽 −1 F S F−T = 𝐽 −1 U S U−T
𝜎
S = 𝐽 F−1 𝜎 F−T
1
𝐽
F S FT
S = F−1 𝜏 F−T
P = FS
S = F−1 P
12
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
.Л
.
те
ла
∙ T𝐵 = RT P = U S — Biot (or Jaumann) stress tensor
ит
ин
ёр
до
А
го
4.3. Напряжения при малых деформациях
о
→ 𝜎 + 𝑂(∇u) = S + 𝑂(∇u)
ор
ми
ру
ем
𝐽 𝜎 = FSF
ог
.А
.,
Л
→ 𝜎 + 𝑂(∇u) = P + 𝑂(∇u)
T
С
4.4. Гиперупругость, упругий потенциал, упругие напряжения
в
∙ C = U2 = F−1 ·F, B = V2 = F·F−1 — меры деформаций;
че
∙ гиперупругость [hyperelastic] — состояние материала не зависит от пути нагружения;
ф
Л
ы
∙ 𝑊 — запасённая энергия деформации = упругий потенциал [elastic potential]:
𝑡0
де
АЯ
Л
ЬН
𝐼,𝐽=1
3
∑︁
𝜕𝑊
e𝐼 ⊗e𝐽 — второй тензор напряжений Пиолы–Кирхгофа
𝜕𝐶 𝐼𝐽
ТЕ
𝜕𝑊
𝜕𝑊
=
e ⊗e𝑗 — тензор напряжений Коши
𝑖𝑗 𝑖
𝜕B
𝜕𝐵
𝑖,𝑗=1
ин
ей
∘ 𝜎=
𝜕𝑊
=
𝜕C
𝑖,𝐽=1
3
∑︁
𝜕𝑊
e𝑖 ⊗e𝐽 — первый тензор напряжений Пиолы–Кирхгофа
𝜕𝐹 𝑖𝐽
ме
∘ S=
𝜕𝑊
=
𝜕F
3
∑︁
𝜕𝑊 ˙
𝐹𝑖𝐽 ,
𝜕𝐹𝑖𝐽
𝑖,𝐽=1
на
я
P=
3
∑︁
˙ = P : Ḟ =
P(F(X, x), X) : Ḟ 𝑑𝑡, 𝑊
ВЕ
РС
И
∫︀𝑡
ха
ни
ка
∙ связь с напряжениями
∘ 𝑊 (F(X, x), X) =
Я
𝑊 (F(X, x), X), 𝑊 (C(X), X), 𝑊 (B(x), x) и т.д.;
11
.1
2.
20
15
𝐽 𝜎 = P FT
тв
ев
F = I + ∇u + 𝑂(∇2 u) = I + 𝑂(∇u)
(︀
)︀
𝐽 = det 𝐹 = det I + ∇u + 𝑂(∇2 u) = 1 + ∇u + 𝑂(∇2 u) = 1 + 𝑂(∇u)
РИ
∘ 𝑑𝑊 = P·𝑑F, 𝑑𝑊 = S·𝑑C, 𝑑𝑊 = 𝜎·𝑑B — элементарная работа;
Д
ВА
∘ 𝑊 (C, X) = 𝑊 (𝐼C , 𝐼𝐼C , 𝐼𝐼𝐼C , X) — упругий потенциал для изотропного тела
∘ S = 2𝑊1 I + 4𝑊2 C + 2𝐽 2 𝑊3 C−1 ,
∘ 𝜎 = 𝐽 −1 F S FT
отметим, что
⇒
𝑊1 =
П
РЕ
Н
ел
∙ изотропный гиперупругий материал
𝜕𝑊
𝜕𝐼C ,
𝑊2 =
𝜕𝑊
𝜕𝐼𝐼C ,
𝑊3 =
𝜕𝑊
𝜕𝐼𝐼𝐼C ;
𝜎 = 2𝐽 −1 𝑊1 B + 4𝐽 −1 𝑊2 B2 + 2𝐽𝑊3 I
− 𝐼B = tr B = tr(F FT ) = tr(FT F) = tr C = 𝐼C ,
[︀
]︀
− 𝐼𝐼B = 12 (tr B)2 − tr(B2 ) = 𝐼𝐼C ,
− 𝐼𝐼𝐼B = det B = det(F FT ) = det(FT F) = det C = 𝐼𝐼𝐼C ;
∙ изотропный гиперупругий сжимаемый нео-гуковский материал [compressible neo-Hookean material]
∘ 𝑊 = 12 𝜇(𝐼C − 3) − 𝜇 ln 𝐽 + 12 𝜆(ln 𝐽)2
∘ S = 𝜇(I − C−1 ) + 𝜆(ln 𝐽) C−1
∘ 𝜎 = 𝜇𝐽(B − I) + 𝜆𝐽(ln 𝐽)I
⃒
⃒
⃒ dx ⃒
⃒
⃒ = 1, |F| = det F = 𝐽 = 1,
∙ несжимаемость ⃒
dX ⃒
det C = 1,
det B = 1
13
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
те
ла
∙ изотропный гиперупругий несжимаемый материал
.Л
.
∘ 𝑊 (𝐼B , 𝐼𝐼B ) — упругий потенциал для изотропного несжимаемого тела;
˜2 B + 𝑊
˜ 1 B−1 — тензор напряжений Коши,
∘ 𝜎 = −𝑝I + 𝑊
ит
ин
нагрузкам);
ёр
до
А
го
где 𝑝 = − 31 tr 𝜎 = − 𝜕𝑊
𝜕𝐽 — гидростатическое давление (−𝑝I — шар не чувствителен к гидростатичеким
∘ несжимаемый нео-гуковский материал [incompressibile neo-Hookean material] ....
тв
𝑊 (𝐼B , 𝐼𝐼B ) = 𝐶1 (𝐼B − 3) + 𝐶2 (𝐼𝐼B − 3)
(︁
𝐶1 𝐼B − 𝐶2 𝐼𝐼B
)︁
𝐶2 = 𝜇(1 − 𝛽)/4
С
− 𝜇 > 0, −1 < 𝛽 < 1;
ТЕ
РИ
Д
ВА
П
РЕ
ел
ин
ей
на
я
Л
ЬН
ме
АЯ
ха
ни
ка
ВЕ
РС
И
де
Я
ф
Л
ы
че
в
− 𝛽 = 0 — линейная упругость.
Н
о
2
3
ор
ми
ру
ем
𝐶1 = 𝜇(1 + 𝛽)/4,
𝑝* =
ог
.А
.,
Л
𝜎 = −𝑝* I + 2𝐶1 B − 2𝐶2 B−1 ,
11
.1
2.
20
15
ев
∘ несжимаемый материал Муни-Ривлина [incompressibile Mooney–Rivlin material]
14
Лычёв С.А., Левитин А.Л. Нелинейная механика деформируемого твёрдого тела. ПРЕДВАРИТЕЛЬНАЯ ВЕРСИЯ от 11.12.2015
.Л
.
те
ла
Список литературы
Wang C.-C., Truesdell C. Introduction to Rational Elasticity. Noordhoff International Publishing, 1973.
2.
Gurtin M.E. (1983) [1972], “The Linear Theory of elasticity”, in Flügge, Siegfried; Truesdell, Clifford A.,
А
го
1.
ит
ин
ёр
до
Festkörpermechanik/Mechanics of Solids, Handbuch der Physik (Encyclopedia of Physics), VIa/2, Berlin–
Heidelberg–New York: Springer-Verlag, pp. 1-295, ISBN 3-540-13161-2 ISBN 0-387-13161-2.
Springer Verlag, Berlin 1960.
тв
Truesdell C., Toupin R.A. The classical field theories. In: S. Flügge, ed., Handbuch der Physik III/1, pp. 226-793.
ев
3.
Truesdell C., Noll W. The non-linear field theories of mechanics. Springer, 2004.
5.
Maugin G.A. Material inhomogeneities in elasticity. Chapman and Hall, 1993.
6.
Bonet J. and Wood R.W. Nonlinear Continuum Mechanics for Finite Element Analysis. Cambridge University
ог
11
.1
2.
20
15
ор
ми
ру
ем
С
Press, 1997.
о
.А
.,
Л
4.
Трусделл К. Первоначальный курс рациональной механики сплошных сред. М.: Наука, 1975. 592 с.
8.
Лурье А.И. Нелинейная теория упругости. М.: Наука, 1980. 512 с.
9.
Карчевский М.М., Шагидуллин Р.Р. Математические модели механики сплошной среды. Казань: КГУ, 2007.
Л
ы
че
в
7.
ТЕ
РИ
Д
ВА
П
РЕ
Н
ел
ин
ей
на
я
Л
ЬН
ме
АЯ
ха
ни
ка
ВЕ
РС
И
де
Я
ф
212 с.