О пульсациях частоты вращения тягового вентильного двигателя
реклама

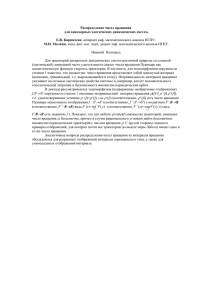
Секция 3 «ЭЛЕКТРОНИКА, ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ И СИСТЕМЫ УПРАВЛЕНИЯ». О пульсациях частоты вращения тягового вентильного двигателя на низких частотах вращения д.т.н., проф. Лохнин В.В., Кузьмицкий Е. В. МГТУ «МАМИ» Вентильный двигатель (ВД) в составе тягового привода (ТЭП) работает в широком диапазоне частот вращения. Из известных методов регулирования частоты вращения, таких как: изменение питающего напряжения , импульсное регулирование по сигналу с датчика положения ротора (ДПР) и импульсное регулирование с отрицательной обратной связью по частоте вращения через тахогенератор, для нас привлекательны два последних, поскольку позволяют использовать для этих целей силовые транзисторы бортового вентильного преобразователя (БВП), тогда как метод изменения питающего напряжения требует дополнительного транзисторного регулятора на полную мощность тягового вентильного двигателя (ТВД). Наличие БВП позволяет регулировать частоту вращения двигателя путём воздействия на входные цепи БВП. При этом импульсное регулирование частоты вращения двигателя обеспечивает наименьшие потери в БВП. Наиболее простой способ импульсного регулирования состоит в изменении соотношения времени включенного и отключённого состояния обмоток, что регулируется отпиранием и запиранием силовых транзисторов БВП [1]. На рис. 1 показаны механические характеристики при выше указанном импульсном регулирование с длительностью tu импульса, линейно зависящего от управляющего сигнала. Устойчивая кратность регулирования частоты вращения не превышает 1:5 и поэтому для ТВД такое регулирование не может быть реализовано поскольку, при возрастании глубины регулирования выше указанной возникают недопустимые пульсации частоты вращения с последующим шаговым режимом работы привода. Значительно более чёткие механические характеристики и большую кратность изменения частоты вращения можно получить в замкнутой системе регулирования с отрицательной обратной связью по частоте вращения, например, через тахогенератор (ТГ). Механические характеристики привода для различных отношений управляющего сигнала Uу к максимальному управляющему сигналу U0, при котором частота вращения ТЭД максимальна показана на рис. 2. Рисунок 1 - Механические характеристики при импульсном регулировании по цепи датчика положения ротора ТВД Материалы международной научно-технической конференции ААИ «Автомобиле- и 69 тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». Секция 3 «ЭЛЕКТРОНИКА, ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ И СИСТЕМЫ УПРАВЛЕНИЯ». Рисунок 2 - Механические характеристики ТВД с управлением от тахогенератора При таком регулировании обеспечивается устойчивая работа (без недопустимых пульсаций частоты вращения) в диапазоне 1:100. Как было отмечено в начале статьи, неограниченный диапазон регулирования частоты вращения ТЭД получаем изменением величины напряжения питания. Применив метод высокочастотной ШИМ (f≈20 кГц) при несущей частоте порядка f< 1000 Гц, ШИМ переносим из цепи источника питания в БВП. На рис. 3 графически показаны все рассмотренные выше методы регулирования частоты вращения из которого видно, что высокочастотный ШИМ аналогичен методу регулирования входного напряжения с помощью дополнительного регулятора и при разложении импульсов питающего напряжения в ряд Фурье убедимся, что практически во всём диапазоне регулирования можно рассматривать напряжение на обмотках ТВД как синусоидальное по первой гармонической разложения, то есть создаваемое магнитное поле трёхфазной обмотки можно рассматривать как вращающееся. В случае же (рис. 3) ШИМ на несущей частоте при длине импульсов питания tu≈0,2 Т появляется шаговый режим работы двигателя. Рисунок 3 - Иллюстрация к методам частоты вращения вентильного ТЭД: а) Импульс питающего напряжения фазы трёхфазного ТЭД при максимальной частоте вращения. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 70 Секция 3 «ЭЛЕКТРОНИКА, ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ И СИСТЕМЫ УПРАВЛЕНИЯ». б) Уменьшение частоты вращения уменьшением амплитуды питающего напряжения. в) Уменьшение частоты вращения изменением длины импульса. г) Уменьшение частоты вращения изменением длины импульса высокочастотной ШИМ. Выводы 1. ТВД, работающий в системе привода, требует глубокого регулирования частоты вращения и для его устойчивой работы необходимо регулирование изменением питающего напряжения. 2. Значительно более экономичным (по минимуму потерь на регулирование) будет метод регулирования питающего напряжения высокочастотной ШИМ, осуществляемой в силовых транзисторах БВП. Литература 1. И.Е. Овчинников, Н. И. Лебедев. Бесконтактные двигатели постоянного тока автоматических устройств. Изд-во «Наука», М-Л, 1966, 187 с. 2. В. А. Прохоров и др. Полупроводниковые преобразователи электрической энергии. Учебное пособие. М.. МГТУ «МАМИ» 2004, 96 с. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 71