использование регуляторов непрямого действия для управления
реклама

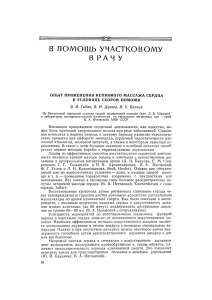
УДК 681.51.011 (075.8) Липа О.А., к.т.н., доцент, Колесов А.С., аспирант ИСПОЛЬЗОВАНИЕ РЕГУЛЯТОРОВ НЕПРЯМОГО ДЕЙСТВИЯ ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССАМИ ПОДДЕРЖАНИЯ ПАРАМЕТРОВ МИКРОКЛИМАТА В УСЛОВИЯХ СТАТИСТИЧЕСКОЙ НЕОПРЕДЕЛЕННОСТИ Рассматриваются регуляторы непрямого действия и оценивается качество управления систем с такими регуляторами. Установлено, что современные регуляторы непрямого действия являются неотъемлемой частью энергоэффективной системы АСУ ТП. КЛЮЧЕВЫЕ СЛОВА: РЕГУЛЯТОР НЕПРЯМОГО ДЕЙСТВИЯ, ЗАКОН УПРАВЛЕНИЯ, ЭНЕРГОЭФФЕКТИВНОСТЬ, АСУ ТП. В современных зданиях и на промышленных предприятиях того или иного рода применяют комплексную систему автоматического регулирования инженерных систем направленного действия, которая состоит из регулируемых объектов и автоматических регуляторов прямого и непрямого действия, динамична и функционально замкнута. Как известно, автоматическое регулирование непрямого действия основано на применении дополнительной энергии (в теплотехнике – электроэнергии). Регуляторы непрямого действия позволяют объединить воедино регулирующие элементы теплового пункта и комплексно воздействовать на регулируемый объект, достигая наилучших показателей энергоэффективности, например, применяя регулирование по погодным условиям, режим ночного снижения теплопотребления и т. д. В современных АСУ ТП функции регулятора реализуются в рамках прикладной программы управления на уровне контроллера. Так, один промышленный контроллер может программно реализовать до тысячи регуляторов. Тем не менее, локальные регуляторы, выполненные в виде отдельных устройств, по сей день активно используются там, где не требуется столь мощного функционала. В системе автоматического регулирования микроклимата в условиях статистической неопределенности необходимо учитывать динамические характеристики объекта. Поэтому в современных АСУ ТП реализуют, как правило, пропорционально-интегрально-дифференциальный закон регулирования, который во многих случаях позволяет достичь оптимального качества управления непрерывными процессами [2]. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и генерирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения. Пропорциональная составляющая стремится устранить непосредственную ошибку в значении стабилизируемой величины, наблюдаемую в данный момент времени. При использовании только пропорционального регулятора значение регулируемой величины никогда не устанавливается на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал, регулирующий мощность нагревателя, постепенно уменьшается при приближении температуры к уставке. Система стабилизируется на определенном значении, при котором мощность нагревателя равна тепловым потерям. При этом температура не может достичь уставки, так как в этом случае мощность нагревателя станет равной нулю, и он начнет остывать, а вместе с этим будет падать и температура. По мере увеличения коэффициента пропорциональности (усиления) уменьшается статическая ошибка, однако слишком большой коэффициент усиления может стать причиной автоколебаний, а при дальнейшем увеличении коэффициента система может потерять устойчивость и пойти “в разнос”. Для устранения статической ошибки вводится интегральная составляющая. Она позволяет регулятору «учиться» на предыдущем опыте. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении. При стабилизации пропорциональная составляющая будет равна нулю, а выходной сигнал будет полностью обеспечиваться интегральной составляющей. При постоянном значении рассогласования интегральная составляющая представляет линейно увеличивающуюся со временем величину. Физически интегральная составляющая представляет задержку реакции регулятора на изменение величины рассогласования, внося в систему некоторую инерционность, что может быть полезно для управления объектами с большой чувствительностью. Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, как бы предугадывая поведение объекта в будущем. Эти отклонения могут быть спровоцированы внешними возмущениями или запаздыванием воздействия регулятора на систему. Чем быстрее регулируемая величина отклоняется от уставки, тем сильнее противодействие, создаваемое дифференциальной составляющей. Когда рассогласование становится постоянной величиной, дифференциальная составляющая перестает оказывать воздействие на сигнал управления. Процесс настройки ПИД-регулятора состоит в основном из задания уставки и значений указанных выше трех коэффициентов. Существует несколько математических методов вычисления оптимальных коэффициентов ПИД-регулятора исходя из обеспечения наибольшей устойчивости системы [1]. Однако на практике настройка регулятора проводится эмпирическим методом. В современных АСУ ТП применяются так называемые самонастраивающиеся ПИД-регуляторы, которые путем подачи на объект единичного воздействия и анализа ответной реакции автоматически выставляют если не оптимальные, то достаточно хорошие коэффициенты. Более того, существуют алгоритмы адаптированного ПИД-регулирования, предполагающие автоматическую корректировку коэффициентов регулирования в процессе управления. С их помощью можно достичь очень высокого качества управления даже в сильно нелинейных системах, однако технологи и по сей день относятся к этому функционалу с большим подозрением. Рассмотрим преимущества использования адаптивных ПИДрегуляторов на примере работы системы теплоснабжения калорифера приточной системы вентиляции в условиях статистической неопределенности. Наиболее простое регулирование – двухпозиционное (рис.1, а). При таком законе клапан либо полностью открыт, либо закрыт. Применение двухпозиционного регулирования (пропусками), например, клапаном с электромагнитным (соленоидным) приводом в тепловых сетях запрещено. В то же время, для регулирования конечного потребителя во внутренних системах здания, такого как калорифер, фанкойл, радиатор и т. п., двухпозиционный закон регулирования имеет широкое применение. Его реализуют клапанами с термоприводами. Термопривод изменяет положения затвора клапана (закрыто или открыто) в течение обычно не менее мин. Это позволяет предотвратить гидравлическую нестабильность работы системы (гидроудары, шум и пр.). Пропорциональное регулирование (рис. 1, б), по своей сути, является реализацией идеального регулирования. Изменению теплового состояния объекта регулирования соответствует перемещение затвора клапана. При использовании этого закона необходимо учитывать влияние авторитета клапана на его расходную характеристику. В противном случае возникает остаточная неравномерность регулируемого параметра. Пропорционально-интегральный закон регулирования (рис. 1, в) сочетает положительные свойства пропорционального и интегрального регулирования. Пропорциональной составляющей обеспечивается лучший процесс перехода в новое положение затвора клапана, а интегральной – создается колебательное перемещение затвора, возобновляющее регулируемый параметр без остаточной неравномерности. Таким образом, регулирующее воздействие пропорционально отклонению регулируемого параметра и интегралу времени этого отклонения. При этом происходит лишь незначительное отклонение температуры воздуха в начале изменения теплового баланса помещения. Эта способность достигнута применением гибкой (упругой) обратной связи между регулируемым параметром и регулирующим клапаном. Поэтому для своевременного реагирования на изменение теплового режима в помещении регуляторы непрямого действия управляют электроприводами. Пропорционально-интегральное регулирование имеет преимущество при регулировании быстро и резко изменяющихся регулируемых величин с самовыравниванием и без самовыравнивания за счет тепловой инерции регулируемого объекта, например, тепловой инерции здания. При регулировании температуры воздуха в помещениях здания с ограждающими конструкциями, имеющими большую тепловую инерцию и незначительном запаздывании реагирования температуры воздуха на изменение температурной обстановки, выбор пропорционального либо пропорционально-интегрального закона регулирования не дает существенных преимуществ. Однако в зданиях с ограждающими конструкциями, имеющими малую тепловую инерцию, преимущества пропорционально-интегрального закона более значительны. В любом случае, возможность реализации регуляторами непрямого действия регулирования по погодным условиям, режима выходного дня и т. п. позволяет получить экономический эффект за счет своевременного обеспечения теплового комфорта. При регулировании инженерных систем здания пропорциональноинтегрально-дифференциальный закон регулирования практически не применяют по ряду причин. Главная из них состоит в том, что перемещение затвора клапана зависит не только от скорости, но и от ускорения изменения регулируемой величины, что, с учетом инерционности рассматриваемых объектов регулирования, является мало востребованной функцией. а) б) в) Рис. Варианты регулирования работы системы теплоснабжения калорифера приточной системы вентиляции в условиях статистической неопределенности: а) двухпозиционное регулирование, б) П-регулирование, в) ПИ-регулирование. Поскольку двухпозиционное регулирование (регулирование пропусками) в тепловых сетях, например, соленоидными клапанами, запрещено нормативно, П-регулирование и ПИ-регулирование являются наиболее применяемыми при автоматизации инженерных систем зданий. Спектр регуляторов, представленных на сегодняшний день на рынке оборудования АСУ ТП, велик, и, следовательно, каждый из этих типов должен быть грамотно подобран под индивидуально поставленную задачу и оптимально внедряться как элемент АСУТП во всю инженерную систему объекта. На рис. 1 представлены варианты регулирования работы системы теплоснабжения калорифера приточной системы вентиляции в условиях статистической неопределенности. Положительной и отрицательной осями Q указаны соответственно теплопоступление и теплопотери помещения, положительной и отрицательной осями t – повышение и понижение температуры воздуха, положительной и отрицательной осями h – направление перемещения затвора клапана на открывание и закрывание. Анализируя графики, представленные на рис. 1, на основании вышеизложенного можно сделать однозначный вывод, что современные регуляторы непрямого действия являются неотъемлемой частью энергоэффективной системы АСУ ТП. Работа современных регуляторов основывается на рассмотренных законах регулирования, однако закон ПИД-регулирования показал себя наиболее оптимальным для использования в системах автоматики, работающих в условиях статистической неопределенности, поскольку ПИД-регулирование имеет преимущество при регулировании быстро и резко изменяющихся физических величин. Список литературы: 1.Липа О.А. Методы управления технологическими процессами в условиях информационной неопределенности. М.: ФГОУ ВПО РГАЗУ, 2011. 304 с. 2.Методы классической и современной теории автоматического управления: учебник в 3-х т. / Под ред. Н.Д. Егупова. – Изд-во МГТУ им. Н.Э. Баумана, 2000.