КАЧЕСТВЕННЫЙ И КОЛИЧЕСТВЕННЫЙ АНАЛИЗ СВОЙСТВ
реклама

Глава 4
КАЧЕСТВЕННЫЙ И КОЛИЧЕСТВЕННЫЙ АНАЛИЗ
СВОЙСТВ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
4.1. Введение
Объектом исследований в анализе является заданная математическая
модель информационной системы.
Целью анализа является исследование свойств решений тех урав
нений, которыми описывается математическая модель.
Количественный анализ заключается в построении собственно ре
шений уравнений, описывающих математическую модель.
Качественный анализ сопряжен с анализом заданных уравнений,
позволяющих дать заключение о свойствах решений самих уравнений
без построения собственно решений этих уравнений.
4.2. Инструментарий анализа
4.2.1. Формула Коши
Рассмотрим стационарную линейную систему, описываемую уравне
нием в форме Коши
(4.1)
где x — вектор состояний (выход); f — вектор внешних воздействий
(вход); P,B — заданные матрицы чисел соответствующих размеров; t —
время; x0 — вектор начальных условий.
Общее решение x(t,0,x0,f) уравнения (4.1), представляемое графи
ком или интегральной кривой, складывается из двух составляющих,
называемых свободной и вынужденной, и описывается формулой
4.2. Инструментарий анализа
81
называемой формулой Коши. При этом второе слагаемое формулы
Коши называется интегралом Коши. Здесь
обозначает
свободную составляющую общего решения или свободное движение
системы, порожденное начальными условиями при отсутствии внеш
них воздействий.
Решение этой однородной системы
представляется посредством матричной экспоненты (ePt — матрица
размерами n×n)
.
Доказательство этого утверждения основано на том, что экспонен
циальная функция допускает разложение
,
где i! = 1×2×…×i — обозначение факториала, P0 = En (En — единичная
матрица размерами n×n), в силу которого матрица Р коммутирует со
своей матричной экспонентой
PePt = ePtP,
как следствие, подстановка x = ePtx0 в уравнение x• = Px (в соответст
вии с правилами дифференцирования функции ePt) обращает его в
тождество
ePtPx0 = PePtx0.
В свою очередь,
обозначает вынужденную составляю
щую общего решения или вынужденное движение системы, иногда
называемое нормальной реакцией на внешнюю нагрузку. Вынужден
ное движение порождено внешним воздействием при нулевых на
чальных условиях.
Отметим, что формула Коши может быть названа суперпозицией
функций, т.е. композицией более сложной функции, полученной
суммированием двух функций.
Отметим, что в случае нестационарных линейных систем
82
Глава 4. Качественный и количественный анализ свойств математических моделей
формула Коши при помощи нормированной в точке t0 фундаменталь
ной системы решений X(t) или матрицы размерами nґn, удовлетворя
ющей матричному уравнению
записывается в аналогичном виде
В случае нестационарных линейных систем формальное представ
ление нормированной в точке t0 фундаментальной системы в виде ма
тричной экспоненты
недопустимо ввиду того, что матрица общего вида Р(t) некоммутатив
на (неперестановочна) с матрицей
, т.е.
Последнее неравенство верно лишь только тогда, когда матрица
P(t) является диагональной (случай ЛаппоДанилевского). В этом
случае нестационарная линейная система эквивалентна скалярной
системе
допускающей аналитическое решение
что проверяется непосредственной подстановкой.
Вторым случаем, допускающим интегрирование в замкнутом виде,
является случай верхнетреугольной или нижнетреугольной матрицы
P(t). Отметим, что эти матрицы могут быть как правыми, так и левы
ми. Для определенности рассмотрим правую верхнетреугольную мат
рицу
4.2. Инструментарий анализа
83
Однородная нестационарная линейная система с такой матрицей
очевидным образом интегрируется снизу вверх, начиная с последней
строки. Для нижнетреугольной матрицы интегрирование ведется
сверху вниз, начиная с первой строки.
Но ни в первом, ни во втором случаях элементарные функции, как
результат интегрирования, не гарантированы, поскольку их получе
ние зависит от конкретного вида функций, которыми заданы элемен
ты матрицы P(t). Если эти функции таковы, что позволяют взять таб
личный интеграл, то решение получается в элементарных функциях,
в противном случае — в квадратурах.
Сказанное выше демонстрирует следующий пример.
Пример 4.1. Рассмотрим систему с правой верхнетреугольной мат
рицей
которая в скалярном виде записывается как
Интегрирование этой системы снизу вверх дает
Следует отметить, что к правому верхнетреугольному виду соглас
но теореме Перрона [3] может быть приведена любая однородная не
стационарная линейная система
84
Глава 4. Качественный и количественный анализ свойств математических моделей
в результате линейного преобразования (Перрона)
с ортогональной матрицей U(t). Такие матрицы по определению удов
летворяют равенствам: UT(t) = U–1(t) или UT(t)U(t) = U(t)UT(t) En.
Система, полученная в результате ортогонального преобразова
ния, будет иметь вид
где P(t) — правая верхнетреугольная матрица.
Р.Э. Виноградом доказано, что ортогональная матрица, участвую
щая в преобразовании Перрона, может быть получена в процессе ор
тогонализации и нормировки Шмидта векторов, составляющих нор
мированную в точке t0 фундаментальную систему решений.
4.2.2. Трансформация формулы Коши в дискретную математическую
модель, описываемую разностными уравнениями
Опишем алгоритм перехода от непрерывной модели к дискретной.
Наряду с непрерывной системой (4.1) рассмотрим непрерывно
дискретную систему
в которой вектор внешних воздействий f1 имеет ту же размерность,
что и f, но в отличие от f является кусочнопостоянным в интервалах
[iT,(i+1)T](i = 0,1,2,…), где T>0 — заданный интервал дискретности.
На интервале [0, T] формулу Коши непрерывнодискретной систе
мы можно представить в виде
Введем обозначения
с учетом которых перепишем эту формулу как
4.2. Инструментарий анализа
85
На следующем интервале [Т, 2T] формула Коши будет иметь вид
или с учетом введенных обозначений и равенства (по времени) интер
валов [0,T] = [T,2T] вид
Тем самым, для произвольного интервала [iT, (i+1)T] дискретную
модель непрерывной системы можно записать в виде
где сомножитель Т при членах, содержащих i, опущен.
4.2.3. Характеристический многочлен
Функция det[Ens – P], где Еn обозначает единичную матрицу размера
ми n×n
представляет собой многочлен от комплексной переменной s, степень
которого равна порядку матрицы Р:
(4.2)
Данный многочлен называется характеристическим многочленом
(или характеристическим полиномом).
Односвязная стационарная линейная система, заданная в форме
входвыход или в операторной форме, фактически задается своим ха
рактеристическим многочленом.
В форме Коши своим характеристическим многочленом задаются
следующие матрицы, называемые сопровождающими матрицами ха
рактеристического многочлена:
1) матрица Фробениуса
86
Глава 4. Качественный и количественный анализ свойств математических моделей
2) матрица КрыловаЛюенбергера
Нетрудно видеть, что элементы нижней строки матрицы Фробени
уса и правого столбца матрицы КрыловаЛюенбергера совпадают с
коэффициентами характеристического многочлена с точностью до
знаков. Причем, одна матрица получается из другой путем транспо
нирования.
Для матриц общего вида коэффициенты характеристического
многочлена необходимо вычислять.
Всякая квадратная матрица удовлетворяет своему характеристиче
скому многочлену, что записывается в виде следующего тождества Га
мильтонаКэли
где обозначает нулевую матрицу размера nґn.
Тем самым, характеристический многочлен может быть назван ан
нулирующим многочленом матрицы Р.
Многочлен называется приведенным, если его коэффициент при
старшей степени s равен единице.
Приведенный аннулирующий для матрицы Р многочлен наи
меньшей степени называется минимальным многочленом этой мат
рицы.
Пример 4.2. Если матрицы Фробениуса и КрыловаЛюенбергера
представить в блочном виде, полагая блоки этих матриц скалярными
матрицами (или диагональными квадратными матрицами с равными
диагональными элементами), т.е. в виде:
1) матрица Фробениуса
4.2. Инструментарий анализа
87
2) матрица КрыловаЛюенбергера
(здесь Em и Qm обозначают, соответственно, единичную и нулевую
матрицы размера m×m), то многочлен (4.2) будет минимальным мно
гочленом степени n < nm для вышеописанных блочных матриц раз
мерности (nm)×(nm).
4.2.4. Корни характеристического многочлена
Рассмотрим характеристический многочлен (4.2). Связь коэффици
ентов α1(i = 1,n) этого многочлена с его корнями λ1(i = 1,n) описыва
ется формулами Виета, которые можно представить в виде
88
Глава 4. Качественный и количественный анализ свойств математических моделей
Отметим, корни могут быть как простыми, так и кратными, как
действительными, так и комплексносопряженными.
4.2.5. Интерполяционный полином Лагранжа8Сильвестра
Пусть минимальный многочлен степени kЈ n матрицы Р имеет вид
где λi — корень минимального многочлена кратности mi;
—
степень минимального многочлена; — поле комплексных чисел. Тог
да соответствующий ему интерполяционный полином Лагранжа
Сильвестра можно записать как
где ai(t) (i = 0, k–1) — искомые коэффициенты этого полинома, зада
ваемого посредством нелинейной функции ϕ(λ), где λ — корень ми
нимального многочлена
(здесь ϕ(P) — обозначение многочлена ϕ(λ), в котором скаляр λ заме
нен матрицей Р).
Отметим, что интерполяционный полином ЛагранжаСильвестра
не аппроксимирует1 матричную экспоненту, а точно вычисляет ее по
формуле, содержащей наименьшее количество членов по сравнению
с другими методами.
Расчетными соотношениями для вычисления коэффициентов ин
терполяционного полинома ЛагранжаСильвестра без потери общно
1 От лат. аpproximare — приближаться или приближенно выражать какиелибо ве
личины через другие, более простые величины.
4.2. Инструментарий анализа
89
сти можно пользоваться и в случае, когда минимальный многочлен
совпадает с характеристическим многочленом.
Коэффициенты интерполяционного полинома ЛагранжаСильвест
ра однозначно определяются из следующих интерполяционных условий:
В частности, если все корни минимального многочлена матрицы
простые (т.е. среди них нет кратных, что означает
), интер
поляционные условия позволяют определить искомые коэффициен
ты интерполяционного полинома из следующей системы линейных
алгебраических уравнений:
Векторноматричная запись этой системы имеет вид
MA(t)=L(t),
(4.3)
где введены обозначения
(здесь M –матрица Вандермонда с определителем, отличным от ну
ля).
Тем самым, искомый вектор A(t) находится по формуле
A(t) = M–1L(t),
(4.4)
где M–1 — матрица, обратная матрице M, что означает M–1M = MM–1 =
= Ek.
В случае, когда один из корней минимального многочлена, напри
мер λi, является кратным (кратности mi >1), интерполяционные усло
вия для него можно выписать в виде
90
Глава 4. Качественный и количественный анализ свойств математических моделей
В общем случае получим r подобных систем, таких, что
.
Векторноматричной записью совокупности этих систем будет ра
венство (4.3), в котором L(t) и M будут видоизменены, а именно:
В случае действительных корней минимального многочлена полу
ченные соотношения можно рассматривать как итоговые. Действи
тельно, при этом выполняется неравенство λi≠λj, имеющее своим
следствием линейную независимость строк матрицы М, что означает
отличие ее определителя от нуля. Вследствие этого матрица М имеет
обратную матрицу. Тем самым, определение искомых коэффициентов
интерполяционного полинома ЛагранжаСильвестра возможно с
применением формулы (4.4).
Рассмотрим теперь случай, когда среди корней минимального
многочлена имеется пара комплексносопряженных: λi = αi + jβi и
λi = αi – jβi, кратности mi, т.е.
4.2. Инструментарий анализа
91
(4.5)
Хорошо известные формулы Эйлера для комплексных чисел
подсказывают, что системы (4.5) нужно сначала сложить, а затем вы
честь одну из другой, получив
(4.6)
Отметим, что при этих операциях мы не изменяем величины опре
делителя исходной матрицы.
Комплексносопряженный корень, возведенный в соответствую
щую степень, есть не что иное, как бином Ньютона, вычисляемый по
формуле
откуда следует
92
(здесь
муле
Глава 4. Качественный и количественный анализ свойств математических моделей
обозначает число сочетаний из i по j, вычисляемое по фор
; символ […] обозначает операцию
взятия ближайшего слева на числовой оси натурального числа).
На основании введенных обозначений равенства (4.6) можно пе
реписать в виде:
Далее условимся индексом i обозначать действительные корни,
символом mi — кратность соответствующего действительного корня,
буквой ν — количество действительных корней (i = 1,ν), индексом j —
пару комплексносопряженных корней, символом mj — кратность па
ры комплексносопряженных корней, буквой η — количество пар
комплексносопряженных корней (i = 1,η).
Тогда структуру вектора L(t) можно задать в виде
Заданная структура вектора L(t) диктует назначение блочной
структуры матрицыM, соответствующей этому вектору. Обозначим
блоки, соответствующие действительным корням, через Mi, а ком
плексносопряженным корням — через Mj. Тогда структуру матрицы
М будет определять выражение
4.2. Инструментарий анализа
93
в котором
(здесь символом ⊗ обозначено «скалярное произведение матриц», т.е.
C = A⊗B означает, что cij = aij × bij, а символом
обозначено число
размещений из i по j, вычисляемое по формуле
).
94
Глава 4. Качественный и количественный анализ свойств математических моделей
Следует отметить, что матрицы вида T1i, T2i, T3i носят название
теплицевых матриц (по имени немецкого математика Отто Теплица).
Нетрудно видеть, что по структуре матрица М состоит из линейно
независимых строк, вследствие чего ее определитель отличен от нуля,
и, следовательно, она имеет обратную матрицу, что дает основание
для определения искомых коэффициентов интерполяционного поли
нома ЛагранжаСильвестра использовать формулу (4.4).
Пример 4.3. Рассмотрим систему, минимальный многочлен кото
рой имеет две пары равных комплексносопряженных корней: s1,2 =
s3,4 = α ± jβ, (j = 1, mj = 2, h = 1), k = 4.
Вычислим коэффициенты ai(t) (i = 0,3) интерполяционного поли
нома ЛагранжаСильвестра. Сформируем матрицы L(t) и M, участву
ющие в формуле (1.3), для нахождения вектора A(t) = col[a0(t), a1(t),
…, a3(t)] искомых коэффициентов:
откуда на основании (1.4) получим
Следует отметить, что математический аппарат корней характери
стического уравнения нестационарных линейных систем неприме
ним для построения решений этих систем. Об этом свидетельствует
следующий пример Р.Э. Винограда, демонстрирующий несостоятель
ность их использования.
Пример 4.4. Пусть матрица Р(t) имеет вид
95
4.2. Инструментарий анализа
Следующий вектор обращает уравнение x• = P(t)x в тождество
В то же время корни характеристического уравнения det[E2λ –
P(t)] = (λ + 1)2 = 0 не имеют ничего общего с этим частным решени
ем, что свидетельствует о неприменимости математического аппарата
корней к интегрированию нестационарных линейных систем.
4.2.6. Тождество Коши
Вернемся к уравнению (4.1), дополнив его уравнением выхода
где zвектор выхода.
Будем полагать, что вход системы (4.1) формируется выходами
следующей стационарной линейной системы
(4.7)
с вектором состояний х1 (здесь Г, H — заданные матрицы чисел соот
ветствующих размеров).
Тогда внешнее воздействие посредством матричной экспоненты
уравнения (4.7) можно представить в виде
Пусть матричные экспоненты уравнений (4.1), (4.7) с помощью со
ответствующих интерполяционных полиномов ЛагранжаСильвестра
записаны в виде
(4.8)
где k, k1 — степени минимальных многочленов этих полиномов.
Вынужденная составляющая общего решения уравнения (4.1) с
учетом уравнения выхода системы может быть записана в виде
96
Глава 4. Качественный и количественный анализ свойств математических моделей
(4.9)
Отдельные фрагменты (4.9) на основании (4.8) представим как
где A(t) = col[α0(t), α1(t), ..., αk–1(t)], A(τ) = col[α0(τ), α1(τ), ...,
αk–1(τ)], T — символ транспонирования.
Подставляя их в (4.9), получим
С учетом формулы (4.3) для вычисления коэффициентов интерпо
ляционного полинома ЛагранжаСильвестра, которую для рассмат
риваемых матричных экспонент можно представить в виде
окончательно имеем
4.2. Инструментарий анализа
97
Нетрудно видеть, что элементы матрицы
размерами
где
k×k1, являются табличными интегралами следующих типов:
После подстановки вместо табличных интегралов их выражений
[13]
98
Глава 4. Качественный и количественный анализ свойств математических моделей
получим точное аналитическое выражение для общего решения неод
нородной стационарной линейной системы с интегралом Коши,
представленным квадратурами. В дальнейшем полученную аналити
ческую запись формулы Коши будем называть тождеством Коши.
4.3. Свойства, являющиеся предметом анализа
4.3.1. Устойчивость — анализ свободной составляющей общего решения
Объект исследований — абстрактная математическая модель свобод
ного движения
(4.10)
4.3. Свойства, являющиеся предметом анализа
99
где х — вектор состояний, t — время, х0 — вектор начальных условий,
v — вектор состояний дополнительного уравнения, задающего об
ласть изменения элементов функциональной матрицы [P(v,t)] соот
ветствующего размера.
Ограничение — уравнение (4.10) имеет единственное состояние
равновесия в начале координат, или, что то же самое, единственное
тривиальное решение x(t) є 0¯, где 0¯ — нулевой nмерный вектор, об
ращающий (4.10) в тождество.
Предмет исследований — определение одного из следующих
свойств, которыми могут наделены решения уравнения (4.10), порож
денные произвольным возмущением начальных условий:
1) устойчивость или неустойчивость по А.М. Ляпунову;
Определение 4.1. Тривиальное (нулевое) решение уравнения (4.10)
устойчиво по А.М. Ляпунову, если для всякого l>0, как бы мало оно ни
было, можно указать положительное число А, такое, что для всякого
решения уравнения (4.10) при удовлетворяют условию
(здесь
обозначение евклидовой нормы вектора х, т.е.
).
Определение 4.2. Тривиальное (нулевое) решение уравнения (4.10)
неустойчиво по А.М. Ляпунову, если для всякого λ>0, как бы мало оно
ни было, нельзя указать такое положительное число А, такое, что для
всякого
решения уравнения (4.10) при удовлетворяют условию
2) асимптотическая устойчивость по А.М. Ляпунову.
Определение 4.3. Тривиальное решение уравнения (4.10) — асимп
тотически устойчиво по А.М. Ляпунову, если в дополнение к услови
ям, сформулированным в определении 4.1, имеет место равенство
Качественный анализ устойчивости (асимптотической устойчиво
сти) по А.М. Ляпунову осуществляется с помощью функций А.М. Ля
пунова V(x,t), играющих роль расстояния до начала координат и, как
следствие, удовлетворяющих условиям:
100
Глава 4. Качественный и количественный анализ свойств математических моделей
1) V(0,t) = 0;
2)
.
Основу второго метода А.М. Ляпунова (метода функций Ляпуно
ва) составляют следующие три теоремы А.М. Ляпунова.
Теорема 4.1 (об устойчивости). Достаточное условие устойчивости
по А.М. Ляпунову состоит в существовании функции А.М. Ляпунова,
полная производная по времени от которой, составленная в силу
уравнения (4.10), неотрицательна.
Теорема 4.2 (об асимптотической устойчивости). Достаточное усло
вие асимптотической устойчивости по А.М. Ляпунову состоит в суще
ствовании функции А.М. Ляпунова, полная производная по времени
от которой, составленная в силу уравнения (4.10), отрицательно опре
делена.
Теорема 4.3 (о неустойчивости). Достаточное условие неустойчиво
сти по А.М. Ляпунову состоит в существовании функции А.М. Ляпу
нова, полная производная по времени от которой, составленная в си
лу уравнения (4.10), положительно определена.
Определение 4.4. Будем говорить, что функция А.М. Ляпунова яв
ляется знакоопределенной (положительной, отрицательной, неположи
тельной, неотрицательной), если она удовлетворяет следующим нера
венствам соответственно
Доказательство теорем А.М. Ляпунова основано на понятиях мо
нотонно возрастающей и монотонно убывающей функций (две воз
можные альтернативы поведения расстояния изображающей точки до
начала координат), первые производные от которых являются соот
ветственно положительной и отрицательной функциями. Это означа
ет, что на плоскости точка, изображающая систему, либо удаляется от
начала координат, либо притягивается к нему.
Если функцию А.М. Ляпунова для системы (4.10) выбирать в виде
квадратичной формы
то после ее дифференцирования в силу уравнения (4.10) по правилу
дифференцирования сложной функции
4.3. Свойства, являющиеся предметом анализа
101
необходимое и достаточное условие асимптотической устойчивости
тривиального решения уравнения (4.10) с единственным состоянием
равновесия в начале координат будет состоять в существовании сим
метрической положительно определенной матрицы [A(v,t)], удовле
творяющей матричному уравнению А.М. Ляпунова
(4.11)
при граничном условии
где Θn нулевая матрица размера nґn, при заданной матрице [Q(v,t)],
удовлетворяющей условию
(4.12)
В случае, когда тривиальное решение уравнения (4.10) — устойчи
во по А.М. Ляпунову, уравнение (4.11) имеет вид
Количественный анализ уравнений свободного движения стацио
нарных линейных систем осуществляется с помощью корней
λ1 (i = 1,n) характеристического уравнения этих систем. При выпол
нении неравенства:
•Re λ1 < 0 (i = 1,n), где Re — обозначение действительной части
комплексного числа, имеет место асимптотическая устойчивость по
А.М. Ляпунову;
•Re λ1 ≤ 0 (i = 1,n) имеет место устойчивость по А.М. Ляпунову;
•хотя бы для одного j Reλi > 0 имеет место неустойчивость по
А.М. Ляпунову.
Количественный анализ уравнений свободного движения нестаци
онарных линейных систем осуществляется с помощью аналогов кор
ней характеристического уравнения, введенных в рассмотрение
А.М. Ляпуновым и названных им характеристичными числами, со
ставляющими основу первого метода А.М. Ляпунова. Эти числа опре
деляются равенством
где
— обозначение верхнего предела.
102
Глава 4. Качественный и количественный анализ свойств математических моделей
В основе количественного анализа, носящего название первого
метода А.М. Ляпунова, лежит понятие правильной системы, определя
емой как система, максимальное значение суммы характеристичных
чисел которой удовлетворяет равенству
Отметим, что характеристичные числа, взятые с обратным знаком,
носят название показателей А.М. Ляпунова. Для стационарных линей
ных систем характеристичными числами служат действительные час
ти корней характеристического уравнения, взятые с обратным знаком.
Характеристичные числа нестационарных линейных систем могут
быть найдены лишь в отдельных частных случаях, перечисляемых ниже.
10. Предельные системы. Если матрица [P(v,t)] в (4.10) такова, что
где P0 — некоторая матрица чисел, то характеристичными числами
системы (4.10) являются взятые с обратным знаком действительные
части корней характеристического уравнения матрицы P0.
20. Диагональные системы (случай ЛаппоДанилевского). Характе
ристичные числа вычисляются по формуле
30. Почти диагональные системы. Матрица [P(v,t)] называется поч
ти диагональной, если для ее недиагональных элементов выполняют
ся соотношения
Если
где ε — некоторая положительная постоянная, то наименьшее из ха
рактеристичных чисел системы (4.10) определяется выражением
4.3. Свойства, являющиеся предметом анализа
103
а если
то характеристичные числа почти диагональной системы вычисляют
ся по формулам (5.2).
40. Верхне(нижне)треугольные системы. Если матрица [P(v,t)] в
(4.10) является верхне(нижне)треугольной, то необходимое и доста
точное условие правильности такой системы состоит в том, чтобы все
диагональные элементы матрицы [P(v,t)] имели точные средние зна
чения и тогда эти значения, взятые с обратным знаком, являются ха
рактеристичными числами системы (4.10).
50. Приводимые системы или системы, которые посредством пре
образования
с невырожденной матрицей [W(v,t)] приводятся к кинематически по
добной системе
в которой матрица
, определяемая выражением
является матрицей чисел, D — обозначение дифференциального опе
ратора, порожденного дифференциальным выражением
Отметим, что отношение кинематического подобия от хорошо из
вестного отношения подобия отличается дополнительным слагаемым
.
Характеристичными числами приводимой (в смысле А.М. Ляпу
нова) системы (4.10) являются взятые с обратным знаком действи
тельные части корней характеристического уравнения матрицы
.
Отметим, что нахождение характеристичных чисел А.М. Ляпунова
в общем случае требует интегрирования уравнения (4.10), которое мо
жет быть выполнено с привлечением численных или асимптотичес
ких методов.
104
Глава 4. Качественный и количественный анализ свойств математических моделей
4.3.2. Точность и качество — анализ вынужденной составляющей общего
решения
4.3.2.1. Анализ точности и качества
Объект исследований — абстрактная математическая модель
x = [P(v,t)]x + F, x∈Rn, v∈Rn, F∈Rn, t∈[0,∞), x(t0)=x0, t0≥0,
•
(4.13)
где х — вектор состояний, t — время, х0 — вектор начальных условий,
v — вектор состояний дополнительного уравнения, задающего об
ласть изменения элементов функциональной матрицы [P(v,t)] соот
ветствующего размера; F — вектор внешних воздействий.
Ограничения:
1) тривиальное решение однородной системы уравнений, соответ
ствующее системе (4.13), — асимптотически устойчиво по А.М. Ляпу
нову;
2) вектор внешних воздействий F таков, что система (4.13) допуска
ет стационарное движение x(t) = const = xcn, определяемое тождеством
0 = [P(v,t)]xст + F
откуда собственно стационарное движение определяется равенством
xст = –[P(v,t)]–1F.
(4.14)
Наложенные ограничения позволяют в условиях x0 = xcт предста
вить общее решение системы (4.13) в виде
x(t, t0, x0, F) = xст = x(t, t0, x0, 0n) + x(t, t0, 0n, F),
откуда в силу асимптотической устойчивости тривиального решения
(4.13) имеем lim xст(t, t0, x0, 0n) = 0n и, как следствие, для вынужден
t→∞
ной составляющей общего решения равенство
xст = x(∞, t0, 0n, F) = const
(4.15)
Определение 4.5. Вектор xст, определяемый выражением (4.15), но
сит название вектора статических ошибок системы (4.13), являясь ко
личественной характеристикой точности этой системы.
Предмет исследований — определение одного из следующих свойств,
называемых прямыми показателями качества интегральной кривой сис
темы (4.13), являющейся вынужденной составляющей общего реше
ния, порожденной внешним воздействием F, таким, что точность опре
деляется равенством (4.15), при нулевых начальных условиях:
1) время регулирования,
2) перерегулирование.
4.3. Свойства, являющиеся предметом анализа
105
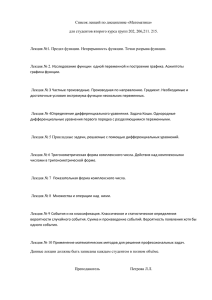
Введение этих показателей1 иллюстрирует следующий рисунок,
называемый «коробочкой» В.В. Солодовникова:
Рис. 4.1
Здесь:
«1» — колебательная переходная характеристика (tр1 — соответству
ющее ей время регулирования). Следует отметить, что для колебатель
ных переходных процессов возможен выброс переходной характерис
тики в отрицательную область изменения z. Тогда максимальное
значение будет измеряться по выбросу в отрицательный квадрант
(а не так, как показано на рисунке);
«2», «3» — монотонная и условно монотонная переходные характерис
тики (tр2, tр3 — соответствующие им значения времени регулирования);
zу — установившееся значение статической характеристики (стати
ческая точность);
zmax — максимальное значение переходной характеристики (свой
ственно только колебательным переходным характеристикам);
σ — отклонение от установившегося значения, называемое 2σтруб
кой (обычно принимается равным ±5% от статической точности zу).
Отметим, что 2σтрубка является качественным признаком пре
вращения переходной характеристики в статическую характеристику,
являясь инструментом их разделения. При этом совокупность этих
характеристик дает интегральную кривую вынужденной составляю
щей общего решения.
Перерегулирование σ (для колебательных переходных процессов)
вычисляется по формуле:
1 1945 год. Профессор МВТУ имени Н.Э. Баумана В.В. Солодовников.
106
Глава 4. Качественный и количественный анализ свойств математических моделей
а время регулирования (момент вхождения кривой переходного про
цесса в 2σтрубку) исчисляется (для колебательных, монотонных и
условно монотонных процессов) по достижению неравенства
Из последнего соотношения следует, что время регулирования яв
ляется количественной границей, отделяющей переходную характе
ристику от статической.
Количественный анализ уравнений свободного движения стацио
нарных линейных систем осуществляется с помощью корней λi (i =
= 1,n) характеристического уравнения этих систем. При выполнении
неравенства:
•Re λi < 0 (i = 1,n), где Re — обозначение действительной части
комплексного числа, имеет место асимптотическая устойчивость по
А.М. Ляпунову;
•Re λi ≤ 0 (i = 1,n) имеет место устойчивость по А.М. Ляпунову;
•хотя бы для одного j Re λi > 0 имеет место неустойчивость по
А.М. Ляпунову.
Количественный анализ прямых показателей качества вынужден
ной составляющей общего решения стационарных линейных систем
осуществляется с помощью формулы Коши.
Качественный анализ этих показателей дают корневые показатели
качества, введенные в рассмотрение А.А. Фельдбаумом применитель
но к стационарным линейным системам в форме «один входодин вы
ход» со входом вида F=1(t):
•степень устойчивости η (расстояние до мнимой оси ближайшего к
ней слева корня);
•колебательность µ (отношение абсолютной величины мнимой ча
сти корня к действительной части для ближайшей (слева) к мнимой
оси пары комплексносопряженных корней).
При этом он рассмотрел три случая расположения корней характе
ристического уравнения на комплексной плоскости, а именно:
а) класс «нуль»
б) класс «1»
Рис. 4.2
в) класс «2»
4.3. Свойства, являющиеся предметом анализа
107
получив для них в условиях f=1(t) следующие аналитические выраже
ния для мажорант Мmax и минорант Mmin переходных процессов, вре
мени регулирования tр и перерегулирования s и инволютивных (лат.
involutio — свертывание, симметрия относительно центра) начальных
условий
z(0) = z0, z(i)(0), (i = 1,n–1), xR1;
а) для класса «нуль» (характеризуется наличием только действи
тельных корней характеристического уравнения)
б) для класса «1» (среди действительных корней характеристичес
кого уравнения имеется одна пара комплексносопряженных корней):
4.3.2.2. Поведение при наихудших внешних воздействиях
В 1946 году членомкорреспондентом АН СССР Борисом Владими
ровичем Булгаковым [7] применительно к асимптотически устойчи
вым стационарным линейным системам, подверженным внешним
воздействиям F (для простоты будем считать F скаляром)
x• = Px + BF, x∈Rn, F∈R1
(4.15)
была введена в рассмотрение кривая накопления отклонений.
Пусть внешние воздействия подчинены неравенствам
F≤ξ
(4.16)
где ξ — заданное положительное число.
Определение 4.6. Будем называть внешние воздействия из области
(4.16) наихудшими, если при них имеют место максимальные откло
нения от нулевого состояния вынужденной составляющей переход
ных процессов. При этом кривую переходных процессов, обусловлен
108
Глава 4. Качественный и количественный анализ свойств математических моделей
ных наихудшими внешними воздействиями, будем называть кривой
накопления отклонений (или диаграммой накопления).
Для стационарных линейных систем наихудшие внешние воздейст
вия — это переключающиеся внешние воздействия, численно равные
ξ, при которых подынтегральная функция интеграла Коши является
функцией одного знака. При этом кривая накопления отклонений од
нозначно определена таким образом сформированной подынтеграль
ной функцией интеграла Коши.
Поясним сказанное. Дополним уравнение (4.15) уравнением выхода
z = Dx, z ∈ R1,
где z — выход.
Тогда отклонения вынужденной составляющей переходного про
цесса от нулевого состояния будут определяться интегралом Коши
(4.17)
Из (4.17) видно, что отклонения будут максимальными, если наи
худшие внешние воздействия определить выражением
fн = ξ sign {D exp[P(t – τ)]B},
где sign — сигнумфункция, задаваемая равенством
Тем самым, подынтегральная функция будет функцией одного
знака. И если до формализации наихудших внешних воздействий эта
функция в общем случае была знакопеременной, то после такой фор
мализации она становится знакопостоянной и, как следствие, заведо
мо большей, чем при обычном ступенчатом воздействии (для которо
го она знакопеременна).
ВЫВОДЫ
1. В замкнутом виде (в аналитической форме, в квадратурах) инте
грируются:
•стационарные линейные системы,
•отдельные виды однородных нестационарных линейных систем.
109
Выводы
Все остальные классы систем, рассматриваемые в ТС, интегриру
ются с использованием приближенных методов (численных или
асимптотических).
2. Формализовать интегрирование удобнее для математических
моделей в форме Коши, форма входвыход в этом смысле обладает
меньшими возможностями.
3. Интегрирование стационарных линейных систем осуществляет
ся с помощью математического аппарата корней либо характеристи
ческого уравнения, либо минимального многочлена. На остальные
классы систем, за исключением приводимых по А.М. Ляпунову, фор
мализм корней не распространяется.
Таблица 4.1
Азбука аналитического конструирования решений
Класс
математичес
ких моделей
Тип
математических
моделей
1
2
1. Стационар 1. Однородные
ные линейные •
x = Px, x∈Rn,
системы
t∈[0,∞), x(0) = x0
2. Неоднородные
•
x = Px + Bf, x∈Rn,
F∈Rn, t∈[0,∞), x(0)
= x0
z = Dx, z∈R1
2. Нестацио 1. Однородные
•
нарные ли
x = P(t)x, x∈Rn,
нейные систе t∈[0,∞), t0≥0,
мы
x(t0)=x0
Форма
представления
решений
Инструмент
аналитического
представления
Аналитическое
конструирование ре
шений
3
4
5
Матричная экс Корни характерис Интерполяционный
понента x(t) = тического уравне многочлен Лагран
ePtx0
ния
жаСильвестра
= 0, + минималь где ai(t) (i = 0,k–1)
ный многочлен сте искомые по формуле
пени k ≤ n
(1.4) коэффициенты
этого многочлена
Формула Коши
Тождество Коши для
вынужденной со
ставляющей общего
решения
x = X(t)x0, где Замена переменных
Х(t) — нормиро по формуле
ванная в точке x = W(t)y, y∈Rn,
t0 фундамен
rankW(t) = n
тальная система
решений, удов
летворяющая
матричному
уравнению
• = P(t)X(t)
X(t)
с начальным ус
ловием
X(t0) = E
1. Если W(t) — орто
гональная матрица,
полученная методом
ортонормализации
ГрамаШмидта, то
кинематически по
добная система
y = P(t)y, где
P = W–1PW –
– W–1W — верхнет
реугольная матрица,
интегрируется снизу
вверх (нижнетре
110
Глава 4. Качественный и количественный анализ свойств математических моделей
1
2
3
2. Неоднородные
•
x = P(t)x + B(t)f,
x∈Rn, f∈Rn,
t∈[0,∞), x(0) = x0
3. Нелиней 1. Однородные
ные системы •
x = [P(x,t)]x,
x∈Rn
2. Неоднородные
•
x = [P(x,t)] + f,
f∈Rn
4
5
угольная матрица,
интегрируется сни
зу вверх (нижнетре
угольная матрица
интегрируется свер
ху вниз)
2. Если матрица
P(t) — диагональ
ная, то
Не интегрируются в элементарных
функциях
Если функциональ
ная матрица — косо
симметрическая, т.е.
[P(x,t)]x = –[PT(x,t)],
то решение имеет вид
гиперсферы
xTx = xT(t0)x(t0).
Если функциональ
ная матрица — косо
симметрическая, т.е.
[P(x,t)] = –[PT(x,t)]
то решение имеет вид
гиперсферы со сме
щенным центром
4. Системы с 1. Однородные
Не интегрируются в
распределен •
x = [P(x,t)], f∈Rn квадратурах, но допу
ными пара 2. Неоднородные скают решения в ви
•
метрами
x = [P(x,t)] + f,
де гиперсферы со
f∈Rn, где [P(x,t)] — смещенным и несме
операторная мат щенным центрами в
рица
случае кососиммет
ричности матрицы
[P(x,t)]
111
Выводы
Таблица 4.2
Перечень введенных определений
Порядковый
К чему относится
номер определения
4.1
Устойчивость по А.М. Ляпунову
4.2
Неустойчивость по А.М. Ляпунову
4.3
Асимптотическая устойчивость по А.М. Ляпунову
4.4
Понятие знакоопределенной функции
4.5
Понятие точности системы (вектор статических ошибок)
4.6
Понятие наихудших внешних воздействий
Таблица 4.3
Азбука корневых показателей качества
№
п/п
Класс расположения
корней
Корневые показатели (степень устойчивости — η,
колебательность — µ,
начальные условия — инволютивные)
1) мажоранта
1 Класс «нуль» — все
корни действительные
и принадлежат левой
полуплоскости
2) миноранта
Mmin = exp(–ηt),
3) перерегулирование
σ = 0.
2 Класс «один» — среди 1) мажоранта
действительных корней
есть одна пара ком
плексносопряженных 2) миноранта
корней, все корни при M = –M ,
min
max
надлежат левой полу 3) время регулирования
плоскости
tp = 3/η,
4) перерегулирование
σ = exp(– π/µ)
Таблица 4.4
Перечень рассмотренных моделей
№ п/п Модель
Однородная нестационарная линейная система с правой верхнетре
4.1
угольной матрицей
4.2 Блочные матрицы Фробениуса и КрыловаЛюенбергера
Матричная экспонента в случае двух пар равных комплексносопря
4.3
женных корней
Пример Р.Э. Винограда о неприменимости математического аппара
4.4
та корней к интегрированию нестационарных линейных систем
112
Глава 4. Качественный и количественный анализ свойств математических моделей
ЗАДАЧИ
4.1. Вычислите коэффициенты интерполяционного полинома Лагранжа
Сильвестра для случая двух действительных (кратных) корней и двух пар
(кратных) комплексносопряженных корней минимального многочлена.
4.2. Сконструируйте тождество Коши для случая, когда матрицы парамет
ров объекта и внешних воздействий имеют размерность 3, а их характеристи
ческие многочлены (совпадающие с минимальными) имеют по 3 разных дей
ствительных корня.
4.3. Выпишите аналитическое представление свободной составляющей
общего решения нестационарной линейной системы 3его порядка, имею
щей правую нижнетреугольную форму.
4.4. Сконструируйте корневые показатели качества для класса «2» распре
деления корней по А.А. Фельдбауму для случая n=5.
4.5. Определите степень устойчивости объекта, характеристическое урав
нение которого имеет вид
(s + 5)(s + 10)(s2 + 10x + 30) = 0.
4.6. Определите колебательность объекта из упражнения 4.5.