Волков В.В., Ерохин В.И. Некоторые свойства решений по А. Н
реклама

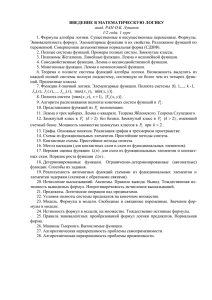
90 Труды XXXVIII Молодежной школы-конференции НЕКОТОРЫЕ СВОЙСТВА РЕШЕНИЙ ПО А. Н. ТИХОНОВУ ПРИБЛИЖЕННЫХ СИСТЕМ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ Волков В.В., Ерохин В.И. e-mail: [email protected] В работе рассматривается задача нахождения решения системы линейных алгебраических уравнений вида (1) Ax = b m×n в случае, когда значения элементов матрицы A ∈ R и вектора b ∈ Rm известны лишь приближённо. Матрица A и вектор b имеют разную степень точности, т.е. вместо точных значений задана инe eb), где A e – µ-приближение дивидуальная приближенная система (A, e 6 µ, матрицы A и eb – δ-приближение столбца b, такие, что kA − Ak e kb − bk 6 δ, µ > 0 и δ > 0 - скалярные параметры, характеризующие степень точности исходных данных, k · k – евклидова матричная или векторная норма. Актуальность задачи поиска решения системы вида (1) обусловлена распространённостью подобных систем при обработке результатов наблюдений и экспериментов. Классическим подходом для решения системы (1) является метод наименьших квадратов, в котором в качестве решения предлагается e −e находить вектор x̂ ∈ Rn , минимизирующий норму невязки kAx bk e e индивидуальной приближенной системы (A, b). Однако, метод наименьших квадратов может приводить к неустойчивым результатам даже при малых возмущениях исходных данных. Рассмотрим подход А. Н. Тихонова (см., например, работу [4]) к решению приближённой системы (1). Основная задача имеет следующий вид. Задача 1. Найти матрицу Aµδ ∈ Rm×n и векторы xµδ ∈ Rn и e 6 µ и kbµδ − ebk 6 δ такие, что система bµδ ∈ Rm , где kAµδ − Ak Aµδ xµδ = bµδ совместна и kxµδ k → min. Сформулируем также вспомогательные задачи. Задача 2. Найти вектор xα , на котором функционал e eb) = kAx e − ebk2 + αkxk2 , F α (x, A, 91 Приближение функций и численный анализ где α > 0 – скалярный параметр, достигает своего минимума. ( kxk → min, Задача 3. Найти вектор x : e = µkxk + δ. keb − Axk Следующая теорема А. Н. Тихонова позволяет выразить решение задачи 1 {Aµδ , bµδ , xµδ } через решение задачи 3. Теорема 1. [3] Cистема (Aµδ , bµδ ), реализующая решение (в смысле задачи 1) приближённой системы (1), существует тогда и только тогда, когда существует решение задачи 3, и определяется единственным образом через x - решение задачи 3 - с помощью формул bµδ xµδ = x, δ e (eb − Ax), = eb − e e kb − Axk e + (bµδ − Ax) e Aµδ = A xT . xT x Теперь обратимся к методам поиска xµδ . Как удалось показать, справедливы следующие утверждения. Теорема 2. [1] ∀α > 0 существует xα , являющийся решением задачи 2, и единственным образом определяемый условием eT A e + αI)xα = A eT eb. (A (2) Теорема 3. [4, 5], цитируется по [2] e 6 keb − Ax e α k. ∀x, xα | kxk 6 kxα k ⇒ keb − Axk Лемма 1. Если eb 6= 0 и δ 6 kebk, то kxµδ k > 0. xk, где Лемма 2. ∀ α1 , α2 | α2 > α1 > 0 ⇒ kxα2 k < kxα1 k < kb e eb). e+eb - нормальное псевдорешение приближённой системы (A, x b=A Лемма 3. ( Если существует решение задачи 1, и kxµδ k < kx̂k, то e α k > µkxα k + δ, kxα k < kxµδ k ⇒ keb − Ax ∀xα>0 ⇒ e α k < µkxα k + δ. kxα k > kxµδ k ⇒ keb − Ax 92 Труды XXXVIII Молодежной школы-конференции Лемма 4. Если существует решение задачи 1, то найдётся такой параметр α, что xµδ = xα , где xα - некоторое решение системы (2). Используя леммы 1-4, несложно доказать следующую теорему. Теорема 4. Если существует решение задачи 1, причём kxµδ k < ( e α k < µkxα k + δ, 0 < α < α∗ ⇒ keb − Ax kx̂k, то ∃!α∗ : xµδ = xα∗ , ∗ e α k > µkxα k + δ. α < α ⇒ keb − Ax Следствие. Для нахождения xµδ можно использовать алгоритм, включающий в себя решение системы (2) и дихотомию по параметру α. Следующая теорема, являющаяся обобщением результатов работы [3] на случай неодинаковой точности задания левой и правой части исследуемой приближённой системы, показывает, что вектор xα даёт устойчивое приближение к нормальному решению совместной системы (1). Теорема 5. Пусть система (1) совместна, ε(µ, δ) и α(µ, δ) - какиелибо возрастающие функции µ и δ, стремящиеся к нулю при µ → 0 и δ → 0 и такие, что µδ 6 ε(µ, δ)α(µ, δ). Тогда для любого ε > 0 найдутся положительные числа δ0 = δ0 (ε, kx0 k) и µ0 = µ0 (ε, kx0 k) такие, что при любых δ < δ0 (ε, kx0 k), µδ µ < µ0 (ε, kx0 k) и α, удовлетворяющем условию ε(µ,δ) 6 α 6 α(µ, δ), справедливо неравенство kxα − x0 k 6 ε, где x0 – гипотетическое нормальное решение системы (1), построенное по точной матрице A и точному вектору b. 93 Приближение функций и численный анализ Вычислительный эксперимент В качестве исходных данных была взята приближенная система из книги [2] с параметрами µ = 4.33 ∗ 10−8 , δ = 1.94 ∗ 10−4 , −0.13405547 −0.20162827 −0.16930778 −0.18971990 −0.17387234 −0.4361 −0.10379475 −0.15766336 −0.13346256 −0.14848550 −0.13597690 −0.3437 −0.08779597 −0.12883867 −0.10683007 −0.12011796 −0.10932972 −0.2657 0.02058554 0.00335331 −0.01641270 0.00078606 0.00271659 −0.0392 −0.03248093 −0.01876799 0.00410639 −0.01405894 −0.01384391 0.0193 0.05967662 0.06667714 0.04352153 0.05740438 0.05024962 0.0747 0.06712457 0.07352437 0.04489770 0.06471862 0.05876455 0.0935 e e [A b]= 0.08687186 0.09368296 0.05672327 0.08141043 0.07302320 0.1079 . 0.02149662 0.06222662 0.07213486 0.06200069 0.05570931 0.1930 0.06687407 0.10344506 0.09153849 0.09508223 0.08393667 0.2058 0.15879069 0.18088339 0.11540692 0.16160727 0.14796479 0.2606 0.17642887 0.20361830 0.13057860 0.18385729 0.17005549 0.3142 0.11414080 0.07846038 0.10803175 0.17259611 0.14669563 0.16994623 0.14816471 0.14365800 0.14971519 0.16007466 0.14003842 0.15885312 0.14374096 0.12571177 0.14301547 0.3529 0.3615 0.3647 6 L−curve LS solution T4 solution µδ line other T4 solutions other µδ lines 5 4 3 ln||x|| 2 1 0 −1 −2 −3 −4 −9 −8 −7 −6 −5 −4 ln||b−Ax|| −3 −2 −1 0 Рис. 1: Результаты вычислительного эксперимента 94 Труды XXXVIII Молодежной школы-конференции Расчёты с использованием теоремы 4 привели к результату " −2.4812769912523696439 # x∗ = −0.5257191027479345273 −0.1779175974264249718 1.6119862316114757776 3.4450690264529035350 , с высокой точностью совпавшему с устойчивыми решениями, полученными в работе [2] различными методами. e eb) На рис. 1 показана L-кривая (L-curve); решение системы (A, по методу наименьших квадратов (LS solution); решение, полученное при помощи теоремы 4 и её следствия с использованием метода дихотомии x∗ (T4 solution) для µ и δ, отвечающих погрешностям задания матрицы A и вектора b; соответствующая линия, для которой выполe = µkxk + δ (µδ line); множество решений няется равенство keb − Axk e = µkxk + δ (other T4 solutions) и соответствующих им линий keb − Axk для других µ и δ (other µδ lines). Список литературы [1]. Воеводин В. В., Кузнецов Ю. А. Матрицы и вычисления. – М.: Наука, 1984. – 320 c. [2]. Лоусон Ч., Хенсон Р. Численное решение задач метода наименьших квадратов – М.: Наука, 1986. – 232 c. [3]. Тихонов А. Н. О некорректных задачах линейной алгебры и устойчивом методе их решения // Докл. АН СССР. 1965. Т. 163, № 3. С. 591–594. [4]. Тихонов А. Н. О приближенных системах линейных алгебраических уравнений // Журн. вычисл. матем. и матем. физ. 1980. Т. 20, № 6. C. 1373–1382. [5]. Marquardt D. W. An algorithm for least-squares estimation of nonlinear parameters // J. Soc. Indust. Appl: Math. 1963. Vol. 11, № 2. P. 431–441. [6]. Morrison D. D. Methods for nonlinear least squares problems and convergence proofs / Proc. of Sem. on Tracking Programs and Orbit Determination. P. 1–9. - Calif., Pasadena, Jet Propulsion Lab., 1960.