асимптотическое положение покоя для систем
реклама

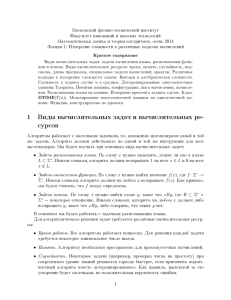
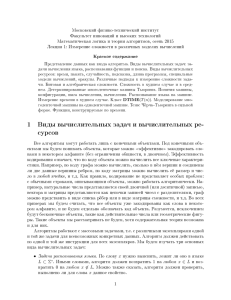
ÓÄÊ 517.9 Âåñòíèê ÑÏáÃÓ. Ñåð. 10, 2014, âûï. 3 Î. Ã. Òèõîìèðîâ, Å. Â. Òåìêèíà ÀÑÈÌÏÒÎÒÈ×ÅÑÊÎÅ ÏÎËÎÆÅÍÈÅ ÏÎÊÎß ÄËß ÑÈÑÒÅÌ ÎÄÍÎÐÎÄÍÛÕ ÍÅÑÒÀÖÈÎÍÀÐÍÛÕ ÄÈÔÔÅÐÅÍÖÈÀËÜÍÛÕ ÓÐÀÂÍÅÍÈÉ Ñàíêò-Ïåòåðáóðãñêèé ãîñóäàðñòâåííûé óíèâåðñèòåò, 199034, Ñàíêò-Ïåòåðáóðã, Ðîññèéñêàÿ Ôåäåðàöèÿ Ââåäåíèå. Ïîíÿòèå ¾àñèìïòîòè÷åñêîå ïîëîæåíèå¿ ïîêîÿ áûëî ââåäåíî Â. È. Çóáîâûì â ðàáîòå [1] äëÿ ñèñòåì, ó êîòîðûõ îòñóòñòâóåò íóëåâîå ðåøåíèå, è â òî æå âðåìÿ âîïðîñ î ñòðåìëåíèè ðåøåíèé ê íóëþ îñòàåòñÿ àêòóàëüíûì. Áûëè ïðåäëîæåíû äîñòàòî÷íûå óñëîâèÿ [12], êîòîðûå ãàðàíòèðóþò åãî ñóùåñòâîâàíèå. Äàííàÿ ðàáîòà îñíîâûâàåòñÿ íà ýòèõ ðåçóëüòàòàõ è ïðîäîëæàåò èññëåäîâàíèÿ ñèñòåì îáûêíîâåííûõ äèôôåðåíöèàëüíûõ óðàâíåíèé ñ íåñòàöèîíàðíûìè è îäíîðîäíûìè ïðàâûìè ÷àñòÿìè, íà÷àòûå â [24]. Áóäóò ïîëó÷åíû äîñòàòî÷íûå óñëîâèÿ, êîòîðûå ãàðàíòèðóþò ñóùåñòâîâàíèå àñèìïòîòè÷åñêîãî ïîëîæåíèÿ ïîêîÿ äëÿ äàííûõ ñèñòåì. Îñîáûé èíòåðåñ ïðåäñòàâëÿåò ïðèâåäåííàÿ ôîðìà ôóíêöèè Ëÿïóíîâà, êîòîðàÿ, â ÷àñòíîñòè, ïîçâîëÿåò ïðîèçâåñòè â äàëüíåéøåì áîëåå äåòàëüíîå èçó÷åíèå. Ïîñòàíîâêà çàäà÷è è îñíîâíûå ïðåäïîëîæåíèÿ. Áóäåì ðàññìàòðèâàòü ñèñòåìó äèôôåðåíöèàëüíûõ óðàâíåíèé ñëåäóþùåãî âèäà: ẋ = F µ (t, x) + f (t), (1) ãäå F µ (t, x) îäíîðîäíàÿ ïî x ôóíêöèÿ ïîðÿäêà µ > 1, îïðåäåëåííàÿ ïðè t ∈ [0, +∞) è x ∈ E n . Âåùåñòâåííûå è íåïðåðûâíûå ôóíêöèè f (t), çàäàííûå ïðè t > 0, äîñòàòî÷íî ìàëû è ñòðåìÿòñÿ ê 0 ïðè t → +∞. Ñäåëàåì íåêîòîðûå äîïîëíèòåëüíûå ïðåäïîëîæåíèÿ îòíîñèòåëüíî ôóíêöèè F µ (t, x). Ïóñòü îíà ÿâëÿåòñÿ íåïðåðûâíîé ïî t è íåïðåðûâíî äèôôåðåíöèðóåìîé ïî x. Êðîìå òîãî, íàéäóòñÿ ïîñòîÿííûå α1 > 0 è βi > 0, i = 1, ..., n, òàêèå, ÷òî ïðè ëþáûõ t è x èç îáëàñòè îïðåäåëåíèÿ âûïîëíÿþòñÿ íåðàâåíñòâà kF µ (t, x)k 6 α1 kxkµ , µ ∂F (t, x) µ−1 . ∂xi 6 βi kxk (2) (3) Òàêæå áóäåì ñ÷èòàòü, ÷òî äëÿ ôóíêöèè F µ (t, x) ñóùåñòâóåò ñðåäíåå 1 F̃ (x) = lim T →+∞ T µ t+T Z F µ (τ, x)dτ, (4) t Òèõîìèðîâ Îëåã Ãåííàäüåâè÷ êàíäèäàò ôèçèêî-ìàòåìàòè÷åñêèõ íàóê, äîöåíò êàôåäðû òåîðèÿ óïðàâëåíèÿ; E-mail: [email protected]. Òåìêèíà Åâãåíèÿ Âèêòîðîâíà ñòóäåíòêà êàôåäðû òåîðèÿ óïðàâëåíèÿ; E-mail: [email protected]. Tikhomirov Oleg Gennadievich PhD, docent of Control Theory department, St. Petersburg State University, 199034, St. Petersburg, Russian Federation; E-mail: [email protected]. Temkina Evgenia Viktorovna student of Control Theory department, St. Petersburg State University, 199034, St. Petersburg, Russian Federation; E-mail: [email protected]. c Î. Ã. Òèõîìèðîâ, Å.Â. Òåìêèíà, 2014. 1 ïðè÷åì èìååò ìåñòî ðàâíîìåðíàÿ ñõîäèìîñòü ïî (t, x) ∈ [0, +∞) × {kxk 6 1}. Òîãäà óñðåäíåííîé ñèñòåìîé äëÿ íåâîçìóùåííîé ñèñòåìû áóäåò ẋ = F̃ µ (x). (5) Äàëåå ïðåäïîëîæèì, ÷òî ôóíêöèÿ F̃ µ (x) ÿâëÿåòñÿ íåïðåðûâíî äèôôåðåíöèðóåìîé è ñèñòåìà (5) àñèìïòîòè÷åñêè óñòîé÷èâà ïî Ëÿïóíîâó.  ýòîì ñëó÷àå [5] íàéäåòñÿ ôóíêöèÿ Ëÿïóíîâà äëÿ äàííîé ñèñòåìû, íåïðåðûâíî äèôôåðåíöèðóåìàÿ ñòîëüêî æå ðàç, êàê è ôóíêöèÿ F̃ µ (x). Ïîòðåáóåì, ÷òîáû òàêàÿ ôóíêöèÿ Ëÿïóíîâà áûëà, êàê ìèíèìóì, äâàæäû íåïðåðûâíî äèôôåðåíöèðóåìà. Òàêèå óñëîâèÿ ïîçâîëÿò ïîêàçàòü, ÷òî ñèñòåìà (1) èìååò àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ â òî÷êå x = 0. Îïðåäåëåíèå. Ïîëîæåíèå x = 0 áóäåì íàçûâàòü àñèìïòîòè÷åñêèì ïîëîæåíèåì ïîêîÿ äëÿ ñèñòåìû òðàåêòîðèé, îïðåäåëÿåìûõ äèôôåðåíöèàëüíûìè óðàâíåíèÿìè dx = F (t, x), dt (6) åñëè ñóùåñòâóåò íåêîòîðàÿ îêðåñòíîñòü ïîëîæåíèÿ x = 0, kxk 6 ε òàêàÿ, ÷òî ëþáîå ðåøåíèå x = x(t, x0 , t0 ) ñèñòåìû (6), íà÷èíàþùååñÿ â ýòîé îêðåñòíîñòè ïðè t = t0 , t0 > 0, áóäåò îãðàíè÷åíî ïðè t > t0 , è, êðîìå òîãî, kx(t, x0 , t0 )k → 0 ïðè t → +∞. Äëÿ òîãî ÷òîáû ñèñòåìà (1) èìåëà àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ, íåîáõîäèìî [1], ÷òîáû âûïîëíÿëèñü óñëîâèÿ ñëåäóþùåé òåîðåìû. Òåîðåìà 1. Åñëè: 1) íàéäåòñÿ ôóíêöèÿ V (t, x1 , . . . , xn ) ïîëîæèòåëüíî-îïðåäåëåííàÿ, V → 0 ïðè x → 0 ðàâíîìåðíî îòíîñèòåëüíî t > 0; 2) ïîëíàÿ ïðîèçâîäíàÿ n X ∂V ∂V dV = + Fs = W + W 1 , dt ∂t ∂xs i=1 îïðåäåëÿåìàÿ â ñèëó ñèñòåìû (6), îáëàäàåò òàêèìè ñâîéñòâàìè: ôóíêöèÿ W = W (t, x1 , . . . , xn ) îòðèöàòåëüíî-îïðåäåëåííàÿ, ôóíêöèÿ W1 = W (t, x1 , . . . , xn ) ñòðåìèòñÿ ê íóëþ ïðè t → +∞ ðàâíîìåðíî îòíîñèòåëüíî x1 , . . . , xn âî âñÿêîé îãðàíè÷åííîé îáëàñòè, ñîäåðæàùåé òî÷êó x = 0; 3) ñóùåñòâóþò ÷èñëà ε1 > 0, ε2 > 0, ε1 < ε2 òàêèå, ÷òî inf V (t, x) > sup V (t, x) äëÿ âñåõ t > 0 kxk=ε2 kxk=ε1 è W + W1 < 0 ïðè ε1 6 kxk < ε2 , t > 0, òî ïîëîæåíèå x = 0 åñòü àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ. Òàêæå äëÿ äîêàçàòåëüñòâà ïîòðåáóåòñÿ ëåììà, ñôîðìóëèðîâàííàÿ è äîêàçàííàÿ â ðàáîòå [4]. Ëåììà. Åñëè äëÿ îïðåäåëåííîé è êóñî÷íî íåïðåðûâíîé ïî t ∈ (−∞, +∞) è íåïðåðûâíîé ïî x ∈ E n îäíîðîäíîé ïî x ïîðÿäêà îäíîðîäíîñòè µ > 1 ôóíêöèè f µ (t, x) âûïîëíåíû óñëîâèÿ |f µ (t, x)| 6 M kxkµ , 2 ãäå M íåîòðèöàòåëüíàÿ ïîñòîÿííàÿ; t+T Z 1 T f µ (τ, x)dτ → 0 ïðè (7) T → +∞ t ðàâíîìåðíî ïî (t, x) ∈ (−∞, +∞) × {kxk 6 1}, òî áóäåò âåðíà îöåíêà t Z µ −ε(t−τ ) µ ε e f (τ, x)dτ 6 ϕ(ε) kxk . (8) −∞ Çäåñü ϕ(ε) > 0 è ϕ(ε) → 0 ïðè ε → 0. Îñíîâíûå ðåçóëüòàòû. Òåîðåìà 2. Åñëè íóëåâîå ðåøåíèå ñèñòåìû (5) àñèìïòîòè÷åñêè óñòîé÷èâî ïî Ëÿïóíîâó, è âûïîëíåíû óêàçàííûå âûøå óñëîâèÿ, òî ñèñòåìà (1) èìååò àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ â òî÷êå x = 0. Ä î ê à ç à ò å ë ü ñ ò â î. Èç óñòîé÷èâîñòè óñðåäíåííîé íåâîçìóùåííîé ñèñòåìû (5) ñëåäóåò [5], ÷òî ñóùåñòâóþò îäíîðîäíàÿ ïîðÿäêà m ïîëîæèòåëüíî-îïðåäåëåííàÿ ôóíêöèÿ Ṽ (x) è ïîëîæèòåëüíî-îïðåäåëåííàÿ îäíîðîäíàÿ ôóíêöèÿ W̃ (x) ïîðÿäêà m+µ−1, ñâÿçàííûå ðàâåíñòâîì ∂ Ṽ (x) µ F̃ (x) = −W̃ (x). ∂x Êðîìå òîãî, êàê ìû ïðåäïîëîæèëè âûøå, ôóíêöèÿ Ṽ (x) äâàæäû íåïðåðûâíî äèôôåðåíöèðóåìàÿ. Äëÿ ðåøåíèÿ çàäà÷è èñïîëüçóåì ôóíêöèþ Ëÿïóíîâà, êîòîðàÿ ñòðîèòñÿ íà îñíîâå ôóíêöèè Ëÿïóíîâà äëÿ óñðåäíåííîé ñèñòåìû Zt V (t, x) = Ṽ (x) + e−ε(t−τ ) i ∂ Ṽ (x) h µ F̃ (x) − F µ (τ, x) dτ . ∂x (9) 0 Î÷åâèäíî, V → 0 ïðè x → 0. Äèôôåðåíöèðóÿ V (t, x), â ñèëó ñèñòåìû (1), ïîëó÷àåì dV (t,x) = ∂ Ṽ∂x(x) F µ (t, x) + ∂ Ṽ∂x(x) f (t) + ∂ Ṽ∂x(x) F̃ µ (x) − dt (1) − + ∂ Ṽ (x) µ ∂x F (t, x) ∂ ∂x t R 0 −ε Rt 0 h i e−ε(t−τ ) ∂ Ṽ∂x(x) F̃ µ (x) − F µ (τ, x) dτ + i h e−ε(t−τ ) ∂ Ṽ∂x(x) F̃ µ (x) − F µ (τ, x) dτ [F µ (t, x) + f (t)] Óïðîùàÿ äàííîå ðàâåíñòâî, èìååì dV (t,x) dt = −W̃ (x) + (1) + ∂ ∂x t R 0 ∂ Ṽ (x) ∂x f (t) −ε Rt 0 h i e−ε(t−τ ) ∂ Ṽ∂x(x) F̃ µ (x) − F µ (τ, x) dτ h i e−ε(t−τ ) ∂ Ṽ∂x(x) F̃ µ (x) − F µ (τ, x) dτ [F µ (t, x) + f (t)] . 3 + Ïðîâåðèì âûïîëíåíèå âòîðîãî óñëîâèÿ òåîðåìû: h i Rt = −W̃ (x) − ε e−ε(t−τ ) ∂ Ṽ∂x(x) F̃ µ (x) − F µ (τ, x) dτ + t 0 i R −ε(t−τ ) ∂ Ṽ (x) h µ ∂ µ + F̃ (x) − F (τ, x) dτ F µ (t, x), e ∂x ∂x W 0 t Z h i ∂ Ṽ (x) ∂ ∂ Ṽ (x) W1 = f (t) + e−ε(t−τ ) F̃ µ (x) − F µ (τ, x) dτ f (t), ∂x ∂x ∂x 0 W1 → 0 ðàâíîìåðíî ïî x íà ëþáîì îãðàíè÷åííîì ìíîæåñòâå ïðè t → +∞. Åñëè â êà÷åñòâå f m+µ−1 (t, x) â ëåììå âçÿòü ôóíêöèþ f m+µ−1 (t, x) f m+µ−1 (t, x) = 0, t < 0, ∂ Ṽ F̃ µ (x) − F µ (t, x) , = ∂x t > 0, òî äëÿ äëÿ íåå, â ñèëó ïðåäåëüíîãî ñîîòíîøåíèÿ (4), ñïðàâåäëèâî óñëîâèå (7). Ñëåäîâàòåëüíî, âûïîëíåíû óñëîâèÿ ëåììû è, òàêèì îáðàçîì, èç íåðàâåíñòâà (8) ïîëó÷àåì óñëîâèå t Z i h ε e−ε(t−τ ) ∂ Ṽ (x) F̃ µ (x) − F µ (τ, x) dτ 6 η(ε) kxkm+µ−1 → 0 ïðè ε → 0. (10) ∂x 0 Òàê êàê Ṽ (x) è W̃ (x) îäíîðîäíûå ôóíêöèè ïîðÿäêîâ m è m + µ − 1 ñîîòâåòñòâåííî, èìåþò ìåñòî ñëåäóþùèå îöåíêè: a2 kxkm > Ṽ (x) > a1 kxkm , b2 kxkm+µ−1 > W̃ (x) > b1 kxkm+µ−1 . Êðîìå òîãî, â ñèëó (2), (3), ïîñòðîèì îöåíêó âèäà t Z i h ∂ ∂ Ṽ (x) −ε(t−τ ) µ µ µ F̃ (x) − F (τ, x) dτ F (t, x) 6 ckxkm+2µ−2 . ∂x e ∂x 0 Òîãäà âûáåðåì ε è δ òàêèå, ÷òîáû ïðè kxk 6 δ âûïîëíÿëèñü íåðàâåíñòâà a1 − η(ε) kxkµ−1 > 0, ε −b1 + η(ε) + ckxkµ−1 < 0. Ýòî ìîæíî ñäåëàòü â ñèëó óñëîâèé òåîðåìû è óñëîâèÿ (10). Òîãäà V (t, x) ïîëîæèòåëüíî îïðåäåëåíà, à W (t, x) îòðèöàòåëüíî îïðåäåëåíà. Îñòàëîñü óáåäèòüñÿ â òîì, ÷òî âûïîëíÿåòñÿ è òðåòüå óñëîâèå. Ïîêàæåì, ÷òî ñóùåñòâóþò òàêèå ÷èñëà n1 > 0, n2 > 0, n1 < n2 , ÷òî ñïðàâåäëèâî íåðàâåíñòâî inf kxk=n2 V (t, x) > sup V (t, x) äëÿ âñåõ t > 0. kxk=n1 Äëÿ âåëè÷èí â ïðàâîé è ëåâîé ÷àñòÿõ ìîæíî ïîñòðîèòü îöåíêè η(ε) µ−1 η(ε) µ−1 m inf V (t, x) > nm a − n , sup V (t, x) 6 n a + n 1 2 2 1 ε 2 ε 1 kxk=n2 kxk=n1 4 Ñëåäóåò îòìåòèòü, ÷òî âåëè÷èíà η(ε) ε çàôèêñèðîâàíà è ðàâíà íåêîòîðîé êîíñòàíòå. Òàêèì îáðàçîì, äîñòàòî÷íî íàéòè òàêèå 0 < n1 < n2 , ÷òîáû âûïîëíÿëîñü íåðàâåíñòâî η(ε) µ−1 η(ε) µ−1 m nm a + n n < n . a − 2 1 1 2 ε 1 ε 2 Áóäåì èñêàòü èõ â ìíîæåñòâå n2 < δ .  ýòîì ñëó÷àå òðåáóåìîå íåðàâåíñòâî ýêâèâàëåíòíî ñëåäóþùåìó: i h µ−1 m a2 + η(ε) ε n1 n2 i< h . (11) η(ε) µ−1 n1 a1 − ε n2 Äðîáü â ëåâîé ÷àñòè (11) ñòðåìèòñÿ ê a2 /a1 ïðè n1 , n2 → 0. Ïîýòîìó äëÿ ïðîèçâîëüíîãî ε̃ > 0 ìîæíî âûáðàòü òàêîå äîñòàòî÷íî ìàëîå δ̃ , ÷òî ïðè n1 , n2 < δ̃ áóäåò âûïîëíÿòüñÿ âûðàæåíèå h i µ−1 a2 + η(ε) ε n1 a a h i ∈ 2 − ε̃, 2 + ε̃ . µ−1 a1 a1 a1 − η(ε) ε n2 h im Ðàññìîòðèì íåðàâåíñòâî aa12 + ε̃ < nn21 , êîòîðîå âûïîëíÿåòñÿ ïðè n1 < mqna22 . Òåïåðü a1 âûáåðåì n2 < min{δ, δ̃}, n1 < min{δ̃, âûïîëíÿåòñÿ öåïî÷êà íåðàâåíñòâ n2 n1 m qn2 m a2 a1 +ε̃ +ε̃ }. Î÷åâèäíî òàêèå n1 , n2 ñóùåñòâóþò, è äëÿ íèõ h a2 + a2 > + ε̃ > h a1 a1 − η(ε) µ−1 ε n1 η(ε) µ−1 ε n2 i i. Òàêèì îáðàçîì, óñëîâèå (11) âûïîëíåíî è n2 < δ . Äàëåå áóäåì ñ÷èòàòü, ÷òî ïàðàìåòðû ε è δ âûáðàíû òàêèì îáðàçîì, ÷òîáû ïðè kxk 6 δ −b1 + η(ε) + c kxk µ−1 d <− , 2 ãäå d íåêîòîðàÿ ïîëîæèòåëüíàÿ ïîñòîÿííàÿ. Òîãäà ïðè n1 6 kxk 6 n2 , d d m+µ−1 W < − kxk 6 − n1 m+µ−1 . 2 2 Áóäåì ïðåäïîëàãàòü, ÷òî f (t) íàñòîëüêî ìàëà, ÷òî ïðè n1 6 kxk 6 n2 èìååò ìåñòî íåðàâåíñòâî W1 6 d2 n1 m+µ−1 . Òîãäà áóäåò ñïðàâåäëèâî íåðàâåíñòâî W + W1 < 0. Òðåòüå óñëîâèå äîêàçàíî. Ñëåäîâàòåëüíî [1], ó ñèñòåìû (1) åñòü àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ â òî÷êå x = 0. Çàìå÷àíèå 1. Ñëåäóåò îòìåòèòü, ÷òî óñëîâèå äîñòàòî÷íîé ìàëîñòè ôóíêöèè f (t) íîñèò ñóùåñòâåííûé õàðàêòåð. Íèæå áóäåò ïðèâåäåí ïðèìåð, êîòîðûé ïîêàçûâàåò, ÷òî áåç âûïîëíåíèÿ äàííîãî óñëîâèÿ ðåøåíèÿ áóäóò ñòðåìèòñÿ ê íóëþ òîëüêî ïðè äîñòàòî÷íî áîëüøèõ çíà÷åíèÿõ t0 â îïðåäåëåíèè àñèìïòîòè÷åñêîãî ïîëîæåíèÿ ðàâíîâåñèÿ. Çàìå÷àíèå 2. Àíàëîãè÷íûì îáðàçîì ìîæíî äîêàçàòü ñóùåñòâîâàíèå àñèìïòîòè÷åñêîãî ïîëîæåíèÿ ïîêîÿ ó ñèñòåìû âèäà ẋ = F µ (t, x) + Gσ (t, x) + f (t), 5 (12) ãäå Gσ (t, x) îäíîðîäíàÿ ïî x ôóíêöèÿ ïîðÿäêà σ > 1, îïðåäåëåííàÿ ïðè t ∈ [0, +∞) è x ∈ E n . Êàê è F µ (t, x), ôóíêöèÿ Gσ (t, x) ÿâëÿåòñÿ íåïðåðûâíîé ïî t è íåïðåðûâíî äèôôåðåíöèðóåìîé ïî x.  äîïîëíåíèå ê îãðàíè÷åíèÿì, íàêëàäûâàåìûì íà ôóíêöèþ F µ (t, x), äîáàâëÿþòñÿ îãðàíè÷åíèÿ íà ôóíêöèþ Gσ (t, x) è åå ÷àñòíóþ ïðîèçâîäíóþ (ïîñòîÿííûå α2 > 0, γi > 0 è υ > 0): kGσ (t, x)k 6 α2 kxkσ , t Z ∂Gµ (τ, x) σ−1 , dτ 6 γi kxk ∂xi 0 t Z Gσ (τ, x)dτ 6 υkxkσ . 0 Âìåñòî (9) äëÿ ýòîé çàäà÷è èñïîëüçóåòñÿ ôóíêöèÿ Ëÿïóíîâà âèäà Zt V (t, x) = Ṽ (x) + e −ε(t−τ ) ∂ Ṽ i (x) h µ F̃ (x) − F µ (τ, x) dτ − ∂x 0 Zt ∂ Ṽ (x) σ G (τ, x)dτ. ∂x 0 Åñëè íóëåâîå ðåøåíèå ñèñòåìû (5) àñèìïòîòè÷åñêè óñòîé÷èâî ïî Ëÿïóíîâó è âûïîëíåíû óêàçàííûå âûøå óñëîâèÿ, òî cèñòåìà (12) èìååò àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ â òî÷êå x = 0. Ïðèìåð. Ðàññìîòðèì ñèñòåìó ẋ ẏ = −x3 + ϕ(t)y 3 + = −y 3 + ψ(t)x3 + 1 t+1 , 1 t2 +1 . (13)  êà÷åñòâå ôóíêöèé ϕ(t) è ψ(t) âîçüìåì ñëåäóþùèå ïî÷òè ïåðèîäè÷åñêèå ôóíêöèè: √ ϕ(t) = cos(√ 2t) + sin(t), ψ(t) = sin( 2t) + cos(t). Ðàññìîòðèì ïðîåêöèè íà ïëîñêîñòü 0xy òðàåêòîðèè ðåøåíèÿ ñ ðàçëè÷íûìè íà÷àëüíûìè äàííûìè. (a) (b) Òðàåêòîðèè ðåøåíèé 6 (c) Ïî ðèñóíêó (a) âèäíî, ÷òî â äàííîì ñëó÷àå òî÷êà (0,0) íå áóäåò àñèìïòîòè÷åñêè óñòîé÷èâûì ðåøåíèåì (è âîîáùå íå áóäåò òî÷êîé ïîêîÿ), íî áóäåò àñèìïòîòè÷åñêèì ïîëîæåíèåì ïîêîÿ (ðåøåíèÿ îãðàíè÷åíû è ñòðåìÿòñÿ ê íåé íà áåñêîíå÷íîñòè). Ðèñóíîê (b) èëëþñòðèðóåò õàðàêòåð ñõîäèìîñòè ê íóëþ ðåøåíèÿ, íà÷èíàþùåãîñÿ â îáëàñòè àñèìïòîòè÷åñêîãî ïîëîæåíèÿ ïîêîÿ. Èç ðèñóíêà (c) ñëåäóåò, ÷òî ðåøåíèå, íå íà÷èíàþùååñÿ â ýòîé îáëàñòè, óõîäèò íà áåñêîíå÷íîñòü. Çàêëþ÷åíèå. Ðàññìîòðåíà ñèñòåìà îäíîðîäíûõ íåñòàöèîíàðíûõ äèôôåðåíöèàëüíûõ óðàâíåíèé ñ âîçìóùåííûìè ïðàâûìè ÷àñòÿìè. Äëÿ íåå íåò íóëåâîãî ðåøåíèÿ, íî âîïðîñ î ïîâåäåíèè ðåøåíèé, ñ íà÷àëüíûìè äàííûìè, áëèçêèìè ê íóëþ, îñòàåòñÿ îòêðûòûì. Óñòàíîâëåíû óñëîâèÿ, ïðè êîòîðûõ ñóùåñòâóåò àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ, åñëè ïðàâûå ÷àñòè ñèñòåìû óäîâëåòâîðÿþò ïðèâåäåííûì óñëîâèÿì. Äîêàçàíà ñîîòâåòñòâóþùàÿ òåîðåìà, îñíîâûâàþùàÿñÿ íà âòîðîì ìåòîäå Ëÿïóíîâà, êîòîðàÿ ïîçâîëÿåò èñïîëüçîâàòü ïîëó÷åííóþ ôóíêöèþ äëÿ äàëüíåéøèõ èññëåäîâàíèé. Ïðèâåäåííûé ïðèìåð, ïîäòâåðæäàåò ðåçóëüòàòû ðàáîòû. Ëèòåðàòóðà 1. Çóáîâ Â. È. Êîëåáàíèÿ è âîëíû. Ë: Èçä-âî Ëåíèíãð. óí-òà, 1989. 415 ñ. 2. Êóïöîâà Ñ. Å. Îá àñèìïòîòè÷åñêîì ïîâåäåíèè ðåøåíèé ñèñòåì íåëèíåéíûõ íåñòàöèîíàðíûõ äèôôåðåíöèàëüíûõ óðàâíåíèé // Òðóäû Ñðåäíåâîëæñê. ìàòåì. îá-âà. 2006. Ò. 8, 1. Ñ. 235243. 3. Àëåêñàíäðîâ À. Þ. Óñòîé÷èâîñòü äâèæåíèé íåàâòîíîìíûõ äèíàìè÷åñêèõ ñèñòåì. ÑÏá.: Èçä-âî Ñ.-Ïåòåðá. óí-òà, 2004. 183 ñ. 4. Òèõîìèðîâ Î. Ã. Óñòîé÷èâîñòü îäíîðîäíûõ íåñòàöèîíàðíûõ ñèñòåì îáûêíîâåííûõ äèôôåðåíöèàëüíûõ óðàâíåíèé // Âåñòí. Ñ.-Ïåòåðá. óí-òà, Ñåð. 10 : Ïðèêëàäíàÿ ìàòåìàòèêà, èíôîðìàòèêà, ïðîöåññû óïðàâëåíèÿ. 2007 Âûï. 3. Ñ. 123129. 5. Çóáîâ Â. È. Óñòîé÷èâîñòü äâèæåíèÿ. Ì.: Âûñøàÿ Øêîëà, 1973. 272 ñ. Ñòàòüÿ ðåêîìåíäîâàíà ê ïå÷àòè ïðîô. À.Ï. Æàáêî. Ñòàòüÿ ïîñòóïèëà â ðåäàêöèþ 3 àïðåëÿ 2014 ã. 7 ÓÄÊ 517.9 Ò è õ î ì è ð î â Î. Ã., Ò å ì ê è í à Å. Â. Àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ äëÿ ñèñòåì îäíîðîäíûõ íåñòàöèîíàðíûõ äèôôåðåíöèàëüíûõ óðàâíåíèé // Âåñòí. Ñ.Ïåòåðá. óí-òà. Ñåð. 10, 2014 Âûï. 3. Ñ. ????. Ðàññìàòðèâàåòñÿ ñèñòåìà îäíîðîäíûõ íåñòàöèîíàðíûõ äèôôåðåíöèàëüíûõ óðàâíåíèé ñ âîçìóùåííûìè ïðàâûìè ÷àñòÿìè. Äëÿ íåå íåò íóëåâîãî ðåøåíèÿ, íî âîïðîñ î ïîâåäåíèè ðåøåíèé ñ íà÷àëüíûìè äàííûìè, áëèçêèìè ê íóëþ, îñòàåòñÿ îòêðûòûì. Óñòàíîâëåíû óñëîâèÿ, ïðè êîòîðûõ ñóùåñòâóåò àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ, åñëè ïðàâûå ÷àñòè ñèñòåìû óäîâëåòâîðÿþò ïðèâåäåííûì óñëîâèÿì. Äîêàçàíà ñîîòâåòñòâóþùàÿ òåîðåìà, îñíîâûâàþùàÿñÿ íà âòîðîì ìåòîäå Ëÿïóíîâà, êîòîðàÿ ïîçâîëÿåò èñïîëüçîâàòü íàéäåííóþ ôóíêöèþ äëÿ äàëüíåéøèõ èññëåäîâàíèé. Ïðèâåäåí èëëþñòðàòèâíûé ïðèìåð, êîòîðûé ïîäòâåðæäàåò ïîëó÷åííûå ðåçóëüòàòû. Áèáëèîãð. 5 íàçâ. Èë. 1. Êëþ÷åâûå ñëîâà : àñèìïòîòè÷åñêîå ïîëîæåíèå ïîêîÿ, àñèìïòîòè÷åñêàÿ óñòîé÷èâîñòü, íåñòàöèîíàðíûå äèôôåðåíöèàëüíûå óðàâíåíèÿ, îäíîðîäíûå äèôôåðåíöèàëüíûå óðàâíåíèÿ, ðàâíîìåðíîå ñðåäíåå 8 Asymptotic quiescent position for systems of homogeneous nonautonomous dierential equations. // Vestnik. St. Petersburg State T i k h o m i r o v O. G., T e m k i n a E. V. University. Ser. 10. Applied mathematics, computer sciences, informatics. 2014. Issue 3. P. ????. A system of homogeneous nonautonomous dierential equations with disturbed right-hand parts is considered. The zero solution doesn't exist for the considered system but the question about behavior of solutions starting near zero is still open. Conditions for existing of asymptotic quiescent position are determined if the right parts of the system satises provided conditions. A corresponding theorem is proved based on second Lyapunov method which allows to use the provided function for further researches. In conclusion an illustrative example is given which avows obtained results. Bibliography 5. Il. 1. Keywords : asymptotic quiescent position, asymptotic stability, non-autonomous dierential equations, homogeneous dierential equation, uniform average 9 Òèõîìèðîâ Îëåã Ãåííàäüåâè÷ êàíäèäàò ôèçèêî-ìàòåìàòè÷åñêèõ íàóê, äîöåíò êàôåäðû òåîðèÿ óïðàâëåíèÿ; E-mail: [email protected]. Òåìêèíà Åâãåíèÿ Âèêòîðîâíà ñòóäåíòêà êàôåäðû òåîðèÿ óïðàâëåíèÿ; E-mail: [email protected]. Tikhomirov Oleg Gennadievich PhD, docent of Control Theory department, St. Petersburg State University, 199034, St. Petersburg, Russian Federation; E-mail: [email protected]. Temkina Evgenia Viktorovna student of Control Theory department, St. Petersburg State University, 199034, St. Petersburg, Russian Federation; E-mail: [email protected]. c Î. Ã. Òèõîìèðîâ, Å.Â. Òåìêèíà, 2014. 10