КУРС ЛЕКЦИЙ "МАТЕМАТИЧЕСКИЕ ЗАДАЧИ В ЭНЕРГЕТИКЕ"
advertisement

ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ПЕНЗЕНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Медведева С.Н.
КУРС ЛЕКЦИЙ "МАТЕМАТИЧЕСКИЕ ЗАДАЧИ В
ЭНЕРГЕТИКЕ"
Тексты лекций
ПЕНЗА 2005
Введение:
При планировании развития, проектировании и управлении режимами
электроэнергетических систем (ЭЭС) необходимо решать круг технических и
технико-экономических задач, которые имеют аналитический и расчетный
характер.
Задачи электроэнергетики достаточно сложны, что обусловлено:
1) сложностью ЭЭС,
2) высокой скоростью и взаимосвязью процессов, протекающих в
различных элементах системы в нормальных и аварийных режимах
к.з., анализ самовозбуждения и др.); выбор настроек автоматических устройств
противоаварийного управления и др.
2) проектирование электроэнергетических объектов – кроме
упомянутых выше расчетов режимов и процессов, необходимых для
правильного решения проектных вопросов нужно вести вычисления связанные
с:
– выбором структуры генерирующих мощностей;
– размещение электростанций и их развитие во времени;
– выбором конфигурации сети: сравнение экономичности вариантов;
3) обеспечением надежной работы при различных авариях
Как следствие, решаемые задачи электроэнергетики являются
многофункциональными, зависящими от многих параметров, громоздкими,
требующими сложных и объемных расчетов. По этой причине
электроэнергетика является одной из отраслей народного хозяйства, где нашли
широкое применение различные моделирующие и вычислительные
устройства.
проведение оптимизационных расчетов экономически целесообразной
компенсации реактивной мощности; конструкторские расчеты проводов, опор
и других сооружений, расчеты трасс ЛЭП;
3) планирование развития ЭЭС – решение широкого круга техникоэкономических задач с целью получения наиболее экономичного решения,
удовлетворяющего заданным техническим условиям;
4) научно-исследовательская работа: широкий круг задач –от физикотехнических вопросов, связанных с разработкой новых машин и аппаратов, до
разработки новых более эффективных алгоритмов и методик решения проблем
п.п.1-3;
5) применение методов моделирования в АСУ (АСДУ) – использование
вычислительных машин непосредственно в контуре управления ЭЭС как части
системы управления позволяет существенно увеличить надежность и
экономичность эксплуатации ЭЭС.
Итак, не только для проведения расчетов и исследования ЭЭС, но и
непосредственно
для
управления
ими
становятся
необходимыми
Классификация областей применения и задач электроэнергетики
1) эксплуатационные расчеты. Задачи, решаемые здесь, можно
условно разделить на 3 группы:
– переработка оперативной информации;
– определение допустимой области управления;
– оптимизация режимов.
Каждая группа включает большой объем разнообразных расчетных
исследований. Например определение области допустимых режимов включает
в себя расчеты потокораспределения установившихся режимов (УР);
определение
статической
устойчивости
и
ее
запасов;
анализ
электромеханических переходных процессов (определение динамической
усталости, исследование длительных переходных процессов, связанных с
аварийными нарушениями балансов мощности, расчеты асинхронных режимов
и т. п.); исследование электромагнитных переходных процессов (расчет токов
вычислительные машины, различные моделирующие устройства.
Развитие устройств моделирования (экскурс в историю)
Разнообразие задач и их усложнение по мере развития ЭЭС обуславливает
все более широкое применение для их решения моделирующих и
вычислительных устройств. Методы решения задач, развивавшиеся
применительно к возрастающим требованиям практики, в значительной мере
определялись возможностями располагаемых устройств.
В 50-е и начале 60-х г.г. широкое применение в электроэнергетических
расчетах получили расчетные столы (статиче-ские модели) постоянного и
переменного тока, с помощью которых выполнялись расчеты установившихся
режимов и электромеханических переходных процессов в ЭЭС. Примерно в
этот же период началось применение аналоговых вычислительных машин и
физических (электродинамических) моделей.
С 60-х годов в электроэнергетике началось широкое применение ЦВМ,
ЭЭС был проведен большой комплекс исследований по отработке новых
систем регулирования противоаварийной автоматики, релейной защиты. Они
служат, по существу, экспериментальной базой (т.к. возможности проведения
эксперимента в реальных ЭЭС весьма ограничены) и наиболее эффективны
там, где не вполне ясно математическое описание исследуемых процессов.
Конструируемые на основе принципов теории подобия физические модели
помогают выяснить существо протекающих процессов, получить адекватное
этим процессам математическое описание.
Физические модели незаменимы в условиях затрудненного применения
которые в настоящий момент являются основным расчетным средством.
натурного эксперимента для решения тех задач, для которых математическое
описание не отработано должным образом. Результаты этих исследований
могут служить цели отработки этого описания с последующим проведением
массовых расчетов на АВМ и ЦВМ. Кроме того, физические модели являются
эффективным средством экспериментальной проверки новых систем (или их
элементов) регулирования, управления и защиты в условиях, близких к
натурным.
Преимущества физической модели ясны – это, по существу,
экспериментальная установка, максимально приближенная к натуре (в смысле
рассматриваемых процессов).
Методы моделирования
Вид моделирующих и вычислительных устройств определяется методом
решения задачи. К этим методам относятся:
– физическое моделирование;
– математическое моделирование;
– численное решение.
Соответственно этому делению говорят о физических моделях и
математических моделях (к которым относят и АВМ) и о ЦВМ.
Физическое моделирование основано на том, что исследуемые
процессы воспроизводятся с помощью процессов той же физической природы,
но в другом, более удобном масштабе. Например, можно построить
синхронный генератор небольшой мощности, в котором процессы будут
протекать так же, как и в мощном генераторе, но в уменьшенном масштабе
(если ток и напряжение меньше в 100 раз, то мощность будет меньше в 10
тысяч раз, и генератор 300 МВт будет воспроизводиться моделью мощностью
30 кВт).
Примером установок физического моделирования могут служить
динамические модели электрических систем, такие модели воспроизводят в
миниатюре мощные ЭЭС, содержащие синхронные генераторы, линии
электропередач (ЛЭП), трансформаторы, нагрузки. На динамических моделях
Недостатки – уникальность и, следовательно, большая
стоимость, большая сложность подготовки работы, необходимость в
персонале высокой квалификации, практическая невозможность
моделирования очень сложных схем (ограничение по числу элементов, по
точности моделирования, по вариациям параметров модели; стремление к
преодолению последнего недостатка приводит к тому, что физические
модели становятся все более математическими).
Математическое моделирование уже требует полного знания
математического описания исследуемых процессов. Это моделирование
основано на аналогии между уравнениями, описывающими процессы
различной физической природы. Например, положение шарика, подвешенного
на пружине, описывается уравнением:
I
d 2x
dt
2
+D
dx
+ Ax = F ,
dt
(1)
x
L
d 2Q
dt 2
+R
dQ 1
+ Q=E
dt c
Ty
dt 2
+ Pa
dδ
+ Pэл (δ) = Pтур
dt
+
-
+
-
+
+
+
+
(2)
Уравнение движения ротора синхронного генератора имеет вид:
d 2δ
Другой вид математических моделей, широко применявшихся в
электронике – расчетные столы. Здесь процессы в электрических системах
моделируется процессами в электри ческих цепях.
-
L
C
т.е.
в
электромагнитном
контуре
описываются
di
1
+ Ri + ∫ idt = E ;
dt
C
dQ
,
по определению тока i =
dt
L
трех ОУ.
+
где I – масса, D – коэффициент трения.
Процессы
колебательном
уравнениями:
Уравнения(1)-(3) по форме полностью совпадают, и из этого вытекает, что
с помощью (2) можно моделировать (1) и (3) и наоборот, важно иметь
численное совпадение параметров этих систем.
В силу простоты реализации для математического моделирования обычно
используют электрические цепи. Универсальные установки здесь –АВМ,
электрические цепи с операционными усилителями, которые выполняют
математические операции интегрирования, суммирования, умножения на
постоянный коэффициент, изменение знака (см. курс «ИИТ и электроника»).
Например, дифференциальное уравнение (1) легко моделируется с помощью
(3)
Математические модели (АВМ) весьма эффективны для решения
обыкновенных дифференциальных уравнений невысокого порядка. И, кроме
того, решающие элементы АВМ широко используются для моделирования
систем автоматического регулирования и управления ЭЭС в экспериментах на
физических моделях и в производстве этих систем.
Преимущества: высокое быстродействие, относительная простота
(производственное обслуживание и соответствующие требования к
персоналу), высокая надежность и стабильность в работе, невысокая
стоимость.
Недостатки:
сравнительно
невысокая
точность
решения
и
алгоритмическая ограниченность, вытекающая из применяемых в них
структурных схем.
Численное решение задачи стало весьма эффективным с применением
ЦВМ. Широкое их применение в электроэнергетических расчетах относится к
началу 60-х, и в настоящее время ЦВМ являются основным расчетным
средством.
ЦВМ (компьютер или ПЭВМ) – универсальное устройство для решения
широкого круга задач большой размерности.
Преимущества – быстродействие и развитая память, широкие
возможности реализации весьма сложных алгоритмов.
Недостатки – высокая стоимость собственно машин и обслуживающего
периферийного оборудования, неполная надежность, необходимость
специалистов высокой квалификации для их обслуживания.
Итак, есть физические и математические модели (включая АВМ), есть
ЦВМ. Возникает вопрос: может быть стоит ограничиться чем-нибудь одним,
например, ЦВМ, и решать все задачи, проводить все исследования только на
ЦВМ. Это не простой вопрос и в свое время он был темой дискуссий на
страницах журнала «Электричество». Результатом этой дискуссии был
очевидный сейчас вывод: каждое из устройств имеет право на существование
и имеет свою область наиболее эффективного применения.
Из приведенного обзора следует, что основным средством проведения
расчетов исследования в электроэнергетике в настоящее время является
ПЭВМ. Быстрое совершенствование компьютеров привело к постоянному
расширению области их применения в электроэнергетике: от проектных
расчетов к оперативным расчетам, к решению задач информативновычислительного обслуживания диспетчера и даже к непосредственному
использованию в контуре автоматического управления и противоаварийной
автоматики ЭЭС.
Возрастающие к точности, надежности и быстродействию решения
электроэнергетических задач требуют разработки:
1) систем проблемно-ориентированных математических ЭЭС;
2) соответствующих программных комплексов с единой информационной
базой.
Решение технической задачи на ЦВМ включает следующие этапы:
1)
техническая постановка задачи;
2)
математическая;
3)
выбор модели;
4)
выбор алгоритма;
5)
составление программы.
Задачи данного курса – изучение вопросов составления рациональных
математических описаний ЭЭС и алгоритмов решения характерных задач
электроэнергетики.
Лекция 2.
Тема 1:УРАВНЕНИЯ СОСТОЯНИЯ УР ЭС
План
Литература по
дисциплине МЗ
Содержание
1. Идельчик В.И. Электрические системы и сети:
Учебник для ВУЗов.– М.:Энергоатомиздат, 1989,
глава 9.
2. Электрические системы. Математические задачи
электроэнергетики: Учебник для студентов ВУЗов/
новое издание!
Под ред.В.А.Веникова.–М:,ВШ,1981, главы 1-2.
3. Конспект лекций
4. Электрические системы. Электрические сети.:
Учеб. Для электроэнерг. Спец. ВУЗов / Под ред.
В.А.Веникова, В.А.Строева. – М.:ВШ, 1998, гл.8
Осн. понятия и – электрическая часть энергетической системы, т. е.
определения
совокупность
элементов,
вырабатывающих,
преобразующих, передающих, распределяющих и
электрическая
потребляющих электрическую энергию
система
– отдельные составляющие явлений в элементах
процесс
системы
режим системы
установившийся
(УР)
– ее состояние в любой момент времени или на
некотором интервале времени
– такое состояние системы, при котором ток в
План
Содержание
любой ветви и напряжение в любом узле остаются
План
постоянными достаточно длительное время, причем
нормальный
режим должен быть симметричным для любой фазы
трехфазной системы переменного тока.
послеаварийный
переходный
параметры
системы
Схема замещения
Для линии
Для
трансформатора
(одна фаза)
Продольные
– установившийся режим, применительно к
которому проектируется электрическая система и
определяются
технико-экономические
характеристики;
– установившийся режим, наступающий после
аварийного отключения какого-либо элемента или
ряда элементов системы
– режим, во время которого система переходит от
одного состояния к другому
– показатели, зависящие от изменения режима. К
параметрам режима относятся напряжения в
различных точках системы, токи в ее элементах,
углы расхождения векторов ЭДС и напряжений,
активные и реактивные мощности и т. д.
Совокупность схем замещения отдельных элементов
сети, соединенных в той же последовательности, что
и реальная схема. Св-ва сети не должны измениться.
Схема замещения для УР составляется на одну фазу
с нейтралью.
R=r0l, X=x0l, bл=b0l,
gл, потери через изоляторы и на корону пренебрегают для УР; емкостной проводимостью
пренебрегают при для воздушных линий <35 кВ,
кабельных <10 кВ.
Активное
сопротивление
трансформатора
определяется на основании пасп. данных трансф-ра:
ΔPк ⋅ U н2 ⋅ , где ΔPк – потери активной мощности
Rт =
S н2
в режиме короткого замыкания, кВт;
U н – ном. напряжение на основном выводе, кВ;
S н – ном. мощность трансформатора, кВА.
Содержание
Реактивное
(индуктивное)
сопротивление
представляет сумму индуктивного сопротивления
рассеяния первичной обмотки и приведенного к ней
индуктивного сопротивления вторичной обмотки.
Рассчитывается оно по формуле
u ⋅ U 2 , где – падение напряжения на
Xт = к н
Sн
индуктивном сопротивлении трансформатора, %.
Здесь uк – напряжение короткого замыкания, %.
Активная проводимость, обусловленная потерями
активной мощности в стали трансформатора на
поперечные
гистерезис и вихревые токи, определяется по
формуле
ΔP
g т = хх , где ΔPхх – потери акт. мощности в
U н2 ⋅
режиме холостого хода.
Реактивная
проводимость
трансформатора,
обусловленная основным магнитным потоком,
находится так:
I ⋅S
Здесь
– потери
ΔQ xx .
ΔQхх = хх н
bт =
100
U н2
реактивной мощности, а I хх – ток холостого хода,
отнесенный к номинальному току и выраженный в
процентах.
Справочные данные! Учитесь искать
Математический
аппарат
Для
расчета
режима
системы
необходим
математический аппарат. Инженер может подобрать
его готовым из огромного накопленного веками
арсенала математических методов, может частично
сконструировать сам. Но это возможно в том случае,
если он ясно представляет себе физику работы
энергосистемы,
обусловленную
физическими
явлениями, одновременно происходящими во всех
План
Содержание
элементах системы. Аналогично подобрать готовые
программные продукты = MathCAD
Определения
По питанию в узлах
цепь замкнутая и В замкнутой хотя бы один контур
разомкнутая
Элементы
Пасс –сопротивления и проводимости
пассивные
и Акт– источники э.д.с. и тока
активные
нейтраль
Узел, имеющий нулевое напряжение
Ветви
продольные
поперечные
Элементы
линейные
нелинейные
План
Содержание
U i = Z ii I i − Ei + Z ij I j
U j = Z jj I j − E j + Z ji I i
Величины
Е
и
I
являются
исходными
(независимыми), Zii,Zij – параметрами системы.
З-ны Кирхгофа
1:
2:
и
R, L, C = const, т.е. не зависят от U и I, пренебрегаем
и R=R0(1+at), L=L(i), C=C(U)– линейные
Источники эдс и тока –нелинейны, если дана
нагрузка в узлах или I=f(S)
СЛАУ, СНАУ
Описание УР эл. сети системой уравнений
1) по законам Ома и Кирхгофа – сопротивления
Способы
ветвей,
описания
состояния эл.сети 2) метод узл напряжений – проводимости ветвей,
и
и
способы 3) метод контурных уравнений – контурные
сопротивления
задания
Далее рассмотреть каждый способ описания
исх.данных
На основе з-нов Ома и Кихгофа
Уравнения
По з-ну Ома для i–й ветви
состояния
линейной
U i = Z i I i − Ei
электрической
В общем случае между отдельными ветвями схемы
цепи
замещения
могут
существовать
взаимные
сопротивления, обусловленные, например, взаимной
индуктивностью
Z ij , причем Z ij = Z ji
Для ветвей, имеющих взаимное сопротивление,
связь между всеми указанными величинами будет
Лекц. 2-2: Расчет схем электрической системы при наличии в них
трансформаторов
Существует два подхода к решению схем с разным уровнем напряжения в
них:
1 – стандартный: сопротивления всех элементов схемы замещения
привести к одной ступени напряжения.
Известно, что коэффициент трансформации трансформатора определяется,
как
K=
N 2 U 2 I1
=
=
N1 U1 I 2 .
(1)
Кроме того, по закону Ома
Zв х
k
Zв ы
U1
= Z вх
I1
;
х
(2)
U2
= Z вых
I2
.
U
U1 = 2
K ; I1 = I 2 ⋅ K , тогда в (2)
Из (1)
U2
U
Z
1
Z вх =
= 2⋅
= вых
K ⋅ I2 ⋅ K
I2 K 2
K2
(4)
(3)
Z вых = K 2 ⋅ Z вх .
и наоборот
(5)
(трансформатор считаем идеальным)
Особенности расчета при приведении элементов схемы замещения к
одному напряжению:
–
подготовительная работа по пересчету параметров схемы
замещения к одному напряжению;
–
считать проще;
–
пересчет полученных результатов к реальным условиям.
2 подход: составление матрицы узловых проводимостей с учетом
коэффициента трансформации без приведения к одной ступени напряжения. В
схему замещения помимо элементов схемы замещения трансформатора
вводятся идеальные трансформаторы.
Рассмотрим, как это учесть, на примере продольной ветви с
проводимостью
трансформации
K ij =
U 'i
Ui
Yij
и идеальным трансформатором с коэффициентом
(в общем случае
– комплексный)
(6)
Режим этой ветви может быть описан
j уравнениями
i’
i
Ii
K ij
I’j
Ij
Требуется заменить
U 'i и
⎡ Y ij − Y ij ⎤ ⎡U 'i ⎤ ⎡ I 'i ⎤
⎢− Y
⎥⋅⎢ ⎥ = ⎢ ⎥
⎢⎣ ij Y ij ⎥⎦ ⎣U j ⎦ ⎣ I j ⎦ .
Ui Ii
I 'i
на
и
Так как трансформатор идеальный, то
Отсюда
(из
соответственно.
S i = S 'i
U i Iˆi = U 'i Iˆ'i
.
(7)
или
(8)
8)
U
Iˆ'i = i Iˆi = Iˆi K тij
U 'i
U 'i = U i K ij
I 'i = I i Kˆ тij
. Из (6)
. Тогда
⎡ Y ij − Y ij ⎤ ⎡ K тij U i ⎤ ⎡ I i Kˆ тij ⎤
⋅
=⎢
⎥
⎢− Y
Y ij ⎥⎥ ⎢ U j ⎥ ⎢ I j ⎥
⎦ ⎣
⎣⎢ ij
⎦ ⎣
⎦
или
сопряженный
ток
или
)
Y ij K тij U i − Y ij U j = I i K тij
Умножив первое уравнений на
Y ij K 2тij U i
K тij
,
− Y ij K тij U i + Y ij U j = I
j
.
, получим
)
− Y ij K тij U j = I i
,
− Y ij K тij U i + Y ij U j = I
j
или в матричной форме
⎡ Y ij K т2ij
⎢
⎣⎢- Y ij K тij
)
- Y ij K тij ⎤ ⎡U i ⎤ ⎡ I i ⎤
⎥⋅⎢ ⎥ = ⎢ ⎥
Y ij ⎦⎥ ⎣U j ⎦ ⎣ I j ⎦
.
(9)
Таким
образом,
трансформаторные
связи
можно
учесть
соответствующим изменением соответствующих элементов матрицы
проводимостей. При этом при комплексных коэффициентах трансформации
Y
получаемая результирующая матрица у становится несимметричной.
Отметим, что современные промышленные программы расчета
установившихся режимов электрических систем составлены без приведения
расчетной схемы к одной ступени напряжения.
ЛЕКЦ. 2-3: УЗЛОВЫЕ УРАВНЕНИЯ УСТАНОВИВШЕГОСЯ РЕЖИМА
ЧЕРЕЗ МОЩНОСТИ НАГРУЗОК И ГЕНЕРАТОРОВ
Общий вид узловых уравнений УР через мощности
фазы. Тогда любой другой вектор, отличающийся от решения изменением фаз
всех компонент на одну величину δ, также будет решением, т.е. U = U e jδ –
*
решение.
В общем виде узловые уравнения УР записываются в матричной форме
Y у U + Y бU б = 3 J .
Подставим в (4)
)
)*
U e jδ Y у U * e − jδ = S у .
(1)
Дополняем уравнениями мощностей узлов
Произведение скалярных величин e jδ e − jδ = 1 , тогда из (5) получаем
)
S i = Pi + jQi = 3U i J i - для i-го узла.
)*
(2)
)
U *e jδ – тоже.
Физическое объяснение полученной множественности решений:
где U д – диагональная матрица линейных напряжений независимых узлов.
–
Объединяем (1) и (2), т.е. из (2) находим
–
1 ) −1 )
J=
Uд Sу .
3
)
1 −1
J=
Uд Sу ;
3
*
тождество U Y у U = S у - по определению, следовательно, U* – решение,
Вектор-столбец узловых мощностей
)
S у = 3U д J ,
(5)
Подставив в (1), получим основное уравнение УР через мощности
в цепи переменного тока значения мощностей зависят не от
абсолютных значений напряжений узлов, а от разности фаз;
в поперечных ветвях потоки мощности не зависят от фаз напряжений
узлов.
Математически это отвечает вырожденности системы (4), т.е.
невозможности
ее
решения
ни
одним
из
методов.
Для
получения
невырожденной системы уравнений надо задать значение фазы одного из
генераторов и нагрузок – СНАУ:
) )
Y у U + Y бU б = U −д1S у .
(3)
напряжений, т.е. число неизвестных фаз будет (n-2), неизвестных модулей (n1). Уравнений должно быть (2n-3) отдельно для вещественных и мнимых
частей. То есть надо исключить одно уравнение для любого узла.
Об единственности решения СНАУ
Полученная система будет невырожденной, однако с технической
Система (3) имеет бесконечное множество решений. Докажем это.
Доказательство для упрощения выкладок рассмотрим для случая U б = 0 .
Уравнения (4): сумма правых частей равна сумме мощностей
генераторов и нагрузок, т.е. равна сумме потерь мощности и исключение
Тогда выражение (3) будет выглядеть
) )
Y у U = U д−1S у
точки зрения ее решение не имеет смысла. Почему?
или
)
)
Uд Yу U = Sу .
(4)
Будем считать, что решением является модуль напряжения U* без
одного из уравнений означает, что мы задаем величину потерь мощности
(активной или реактивной). Такое задание будет приводить к технически
недопустимым решениям.
Так, если величина потерь занижена, то решение будет получено при
1) произвольно задаем значения напряжений;
завышенных уровнях напряжений, и наоборот. Может оказаться, что решения
нет, сумма генерируемых мощностей меньше суммы нагрузок. Для получения
2) рассчитываем правую часть системы (3а) для данного вектора
напряжений;
технически обоснованного решения задачи расчета УР нелинейной сети,
3) считаем систему (3а) линейной для данной правой части;
соответствующего номинальным напряжениям, необходимо задать модуль
4) решаем СЛАУ методом Гаусса;
напряжения одного из активных узлов, того же, для которого задавали фазу
5) сравниваем полученный столбец решений с имеющимся на
напряжения, и исключить соответствующее уравнение баланса. В качестве
предыдущем шаге. Если разность напряжения хотя бы одного узла от его же
такого узла берется самый мощный генераторный узел, ведущий по частоте.
значения на предыдущем шаге больше заданной точности решения, то
Таким образом задаются потери полной мощности в сети и их компенсация
возвращаемся к пункту 2, если заданная точность достигнута, выходим из
возлагается на самый мощный генераторный узел.
цикла расчетов – решение получено.
Выводы: при составлении уравнений установившегося режима для
системы, схема замещения которой содержит поперечные ветви, в качестве
Таким образом, процесс итерационный, но подстановка значений
предыдущих напряжений только в правую часть системы уравнений.
балансирующего, кроме узла нейтрали, необходимо выбрать еще один
Итерационные формулы имеют вид:
активный узел, получив систему из (n-2) комплексных уравнений; если же в
I( U (i ) ) =
схеме замещения нет поперечных ветвей, следовательно, в качестве
балансирующего выбран активный узел, то не требуется дополнительной
Yу U
фиксации модуля и фазы напряжения, т.е. число комплексный уравнений
будет (n-1).
(i +1)
(
)
1 ˆ −1 ˆ
U д S у − Y бU б ;
3
= 3 I( U
(i )
(6)
).
Применение метода простой итерации и метода Зейделя для решения
СНАУ.
Итерационные методы (простая итерация и по методу Зейделя) могут
Методы решения СНАУ
применяться аналогично тому, как это производилось при решении СЛАУ,
Применение метода Гаусса для решения СНАУ УР
только в правой части итерационных формул будут так же как и слева
Уравнение (3) можно записать в виде
переменные величины. Итерационные формулы примут вид:
) )
Y у U = U д−1S у − Y бU б
(3а)
Заметим, что система (3а) линейна слева и нелинейна справа, поэтому
можно применять метод Гаусса для какого-то сечения решения. Т. е. алгоритм
метода Гаусса для решения СНАУ таков:
U k(i +1)
⎛
1 ⎜
⎜−
=
Ykk ⎜
⎜
⎝
n
∑ YkjU (ji) +
j =1
j ≠k
S k*
U k*(i )
⎞
⎟
− Yбk U б ⎟ - простая итерация;
⎟⎟
⎠
U k(i +1) =
1
Ykk
⎛ k −1
⎜ − Y U (i +1) −
kj j
⎜ ∑
⎝ j =1
n
S k*
j =k +1
U k*(i )
∑ YkjU (ji) +
⎞
− Yбk U б ⎟ – метод Зейделя.
⎟
⎠
Сходимость итерационных методов к решению медленная. Для
ускорения применяют метод ускоряющих коэффициентов = метод неполной
релаксации.
Достоинства итерационных процессов – простота.
Недостаток – медленная сходимость, м.б. расходимость. Особенно
медленно процесс сходится при расчете схем с устройствами продольной
компенсации, с трехобмоточным трансформатором или автотрансформатором
с очень малым сопротивлением обмотки среднего напряжения, а также для
систем с сильной неоднородностью параметров.
Особенности сходимости СНАУ:
1) сходимость зависит от выбора начальных приближений, может
сойтись, может и не сойтись (для СЛАУ всегда сходится, разное число
итераций);
2) область существования решения ограничена, оно существует на
некотором ограниченном диапазоне изменения вектора Sу.
ЛЕКЦ. 2-4: ФОРМЫ ЗАПИСИ УРАВНЕНИЙ УСТАНОВИВШЕГОСЯ
РЕЖИМА ДЛЯ ОБЩЕГО СЛУЧАЯ ЗАДАНИЯ ИСХОДНЫХ ДАННЫХ
Особенности записи узловых уравнений УР для реальных задач
пассивных узлов Pi = 0 , Qi = 0 (пассивный узел – нет ни генераторов, ни
нагрузки).
Количество уравнений для каждого узла: одно комплексное или два
В системе уравнений формы (3) источники (генераторы) и потребители
(нагрузка) заданы полными мощностями или активной и реактивной
вещественных баланса мощности. Следовательно, для каждого узла два
вещественных параметра должны быть заданы, два ищем.
Для генераторных узлов
мощностью (их постоянным значением).
даны Pk , U k , → найти Qk , δ k .
В реальных задачах генераторы, как правило, задаются значением
активной мощности
Pг = const и активной составляющей напряжения
Для нагрузочных узлов
даны Pk , Qk → найти U k , δ k .
U г = const . Таким же образом задаются синхронные компенсаторы и
регулируемые статические источники реактивной мощности (о них далее 4-5
курс). Потребители задаются статическими характеристиками активной и
реактивной мощности по напряжению (СХН) (более подробно о них в курсе
«Электроэнергетические системы и сети»).
вида уравнения (3), требуется лишь дополнительная коррекция мощностей по
напряжению. Процедура коррекции будет сказываться на сходимости
итерационного процесса. Собственно алгоритм принципиально не меняется.
Принципиально другой случай с источниками (генераторами): задание
Pг = const и U г = const изменяет состав заданных и искомых параметров
уравнения (3).
Определим состав параметров уравнений установившегося режима в
каждый
характеризуется
k-й
узел
двумя
схемы
замещения
комплексными
вычислительную процедуру итерационных методов.
Покажем это на примере метода Зейделя, для которого алгоритм
расчетов изменится следующим образом:
По потребителям: указанное более общее задание нагрузок не меняет
(3):
Введение в схему замещения узлов с заданными Pk и U k усложняет
или
электрической
четырьмя
системы
вещественными
параметрами режима:
S k и U k – для комплексных или Pk , Qk ; U k , δ k – для вещественных. Для
(i +1)
1) для каждого k-того узла вычисляется не U k
(i +1)
составляющая U k
(i +1)
, не зависящая от Qk (т.е V k
(i +1)
, а Vk
–
определяется как
U (ki +1) при Qk =0)
V (ki +1)
⎛
n
P
1 ⎜ k −1
(i +1)
Y
U
Y jk U (ji ) − Y бk U б + k
=
−
−
∑
∑
jk j
⎜
(i )
Y kk ⎜ j =1
j = k +1
Uˆ k
⎝
⎞
⎟
⎟⎟ , (3.1)
⎠
2) считаем
U (ki +1)
= V (ki +1)
−j
Qk(i +1)
(i )
Ykk Uˆ k
,
(3.2)
Рассмотрим возможные формы записи нелинейных узловых уравнений
тогда Q (i +1) найдем, решив квадратное уравнение
k
установившегося режима (УР).
(i +1)
U k2 = U (ki +1) Uˆ k
⎛
Q (i +1)
⎜
= ⎜V (ki +1) − j k
(i )
⎜
Ykk Uˆ k
⎝
⎞ ⎛
Qk(i +1)
⎟ ⎜ (i +1)
⋅
+
V
j
⎟⎟ ⎜⎜ k
(i )
Ykk Uˆ k
⎠ ⎝
⎞
⎟
⎟⎟ . (3.3)
⎠
во-первых, можно записать в форме баланса токов (выражение 3) или
мощностей [выражение (3) × Û д ]
ˆ Y U+U
ˆ Y U = Sˆ .
U
д У
д б б
у
Для решения (3.3) учитываем, что здесь одно неизвестное Q (i +1) , а
k
(i +1)
величина U k
во-вторых, переход от комплексных к вещественным параметрам
= U k = const задана.
можно
(i +1)
3) решив (3.3), подставляем в (3.2), находим U k
и далее
Метод простой итерации аналогичен методу Зейделя, чуть проще.
Применение метода Гаусса влечет значительное усложнение, поскольку
задание в качестве известных параметров Pk и U k не позволяет свести
систему уравнений к виду (3), т.е. к нелинейной системе алгебраических
уравнений, линейной слева. Это приводит не только к усложнению
вычислительной процедуры, но и к заметному ухудшению сходимости
итерационного процесса.
Для повышения вычислительной эффективности решения СНАУ
установившегося режима в общем случае задания исходных данных могут
быть использованы методы, применение которых требует дифференцирования
уравнений по искомым параметрам, например, метод Ньютона, градиентные и
др.
этом
необходим
переход
от
комплексных
осуществить
на
основе
записи
комплексных
прямоугольной, либо в полярной системе координат (СК).
Отсюда следуют 4 формы записи СНАУ вида (3=3а).
итерационный процесс.
При
(3в)
уравнений
к
вещественным, поскольку в уравнении (3) имеются как комплексы искомых
параметров U , так и сопряженные комплексы Û , а в этом случае
производные можно брать только отдельно по вещественным переменным.
чисел
либо
в
ЛЕКЦ. 2-5: ФОРМЫ ЗАПИСИ УРАВНЕНИЙ УСТАНОВИВШЕГОСЯ
РЕЖИМА ДЛЯ ОБЩЕГО СЛУЧАЯ ЗАДАНИЯ ИСХОДНЫХ ДАННЫХ
(ПРОДОЛЖЕНИЕ ТЕМЫ)
Рассмотрим 4 формы записи СНАУ вида (3=3а), которую запишем еще
(3)
1. Узловые уравнения УР в форме баланса токов в прямоугольной
системе координат
Распишем комплексные выражения через их действительные и мнимые
составляющие:
= U ' д U −д 2 P − jU ' д U −д 2 Q + jU"д U −д 2 P + U"д U −д 2 Q − G бU б + jB бU б .
Разделим действительные и мнимые части уравнения на два векторных
уравнения отдельно для действительной и мнимой части
⎫
⎪
⎬
− BU'+GU" = − U' д U −д 2 Q + U"д U −д 2 P + jB бU б ,⎪⎭
(4.1)
где P и Q – вектор-столбцы соответственно активной и реактивной
составляющих мощностей в узлах; U’ и U” – вектор-столбцы действительных
и мнимых составляющих вектор-столбца искомых напряжений в узлах
системы; G и B – квадратные матрицы порядка N.
Знак “-“ в выражениях для проводимостей введен для удобства записи,
поскольку
r − jx
r
x
1
=
−j
= g − jb .
=
2
2
2
r + jx (r + jx ) ⋅ (r − jx ) r + x
r + x2
Подставив эти выражения в (3), с учетом общепринятого U б = U б ,
получим
(G − jB ) ⋅ (U'+ jU") = (U' д − jU"д )
−1
Раскрываем скобки
⋅ (P − jQ ) − (G б − jB б ) ⋅ U б .
– в знаменателе диагональная матрица квадратов
GU'+ BU" = U' д U д− 2 P + U"д U д− 2 Q − G бU б ;
Y б = G б − jB б ,
Y=
разности квадратов, а следовательно
напряжений)
S = P + jQ;
U = U'+ jU" ;
Y у = G − jB ,
(U'д + jU"д ) ⋅ (P − jQ )
− G U + jB бU б =
(U'д + jU"д )⋅ (U'д − jU"д ) б б
(учтем, что знаменатель равен
(U'д )2 + (U"д )2 = U 2д
раз
) )
Y у U = U д−1S у − Y бU б .
GU'− jBU'+ jGU"+ BU" =
(4.2)
{ }
где U д− 2 = diag U k− 2 .
В развернутом виде система уравнений принимает вид (для k–го узла):
⎫
⎪
U k2
j =1
j =1
⎪
⎬
N
N
U 'k
U "k
− ∑ bkjU ' j + ∑ g kjU " j = −
Q +
P + bkбU б .⎪
2 k
2 k
⎪
Uk
Uk
j =1
j =1
⎭
N
N
∑ g kjU ' j + ∑ bkjU " j =
U 'k
Pk +
U "k
Qk − g kбU б ;
U k2
(4.2а)
2. Узловые уравнения УР в форме баланса токов в полярной системе
координат
Для получения этих уравнений удобно воспользоваться развернутой
(не матричной!) формой записи исходной системы уравнений (3), то есть
N
P − jQk
− Y kбU б .
∑ Y kj U j = k
Uˆ k
j =1
(4.3)
В полярной СК U j = U j e
jδ j
, U k = Uke
jδ k
[
.
Подставим эти выражение в (4.3) и разделим комплексное выражение
проводимости на действительную и мнимую части:
N
(
)
∑ g kj − jbkj ⋅ U j ⋅ e
j =1
P − jQk jδ k
= k
⋅e
− ( g kб − jbkб )U б .
Uk
jδ j
Разделим обе части уравнения на e
N
(
)
∑ g kj − jbkj ⋅ U j ⋅ e
j =1
(
j δ j −δk
jδ k
.
) = Pk − jQk − (g − jb )U ⋅ e − jδ k .
kб
kб б
Uk
Учтем, что по формуле Эйлера e jα = cos α + j sin α , тогда
N
(
[ (
)
)
)]
(
P − jQk
= k
− (g kб − jbkб ) ⋅ U б ⋅ (cos δ k − j sin δ k );
Uk
.
(
)
N
(
)
∑ g kjU j cos δ j − δ k − j ∑ bkjU j cos δ j − δ k +
j =1
(
)]
[
(
)
(
)]
(4.4)
3. Узловые уравнения УР в форме баланса мощностей в прямоугольной
системе координат
Для вывода используем уравнение в виде (3в)
Подставляем в него соотношения (4.1)
(U'д − jU"д ) ⋅ (G − jB ) ⋅ (U'+ jU") = P − jQ − (U'д − jU"д )⋅ (G б − jB б ) ⋅ U б .
Раскрываем вторые и третьи скобки слева и скобки справа
Раскрываем скобки
N
)
ˆ Y U = Sˆ − U
ˆ Y U .
U
д У
у
д б б
∑ g kj − jbkj ⋅ U j ⋅ cos δ j − δ k + j sin δ j − δ k =
j =1
(
N
⎫
∑ g kj cos δ k − δ j − bkj sin δ k − δ j ⋅ U j = ⎪
j =1
⎪
⎪
P
= k − U б ( g kб cos δ k − bkб sin δ k );⎪
Uk
⎪
⎬
N
∑ g kj sin δ k − δ j + bkj cos δ k − δ j ⋅ U j = ⎪
⎪
j =1
⎪
Qk
⎪
=
− U б ( g kб sin δ k + bkб cos δ k ) ⎪
Uk
⎭
(
j =1
)
(
)
N
N
P
Q
+ j ∑ g kjU j sin δ j − δ k + ∑ bkjU j sin δ j − δ k = k − j k −
Uk
Uk
j =1
j =1
− g kбU б cos δ k + jbkбU б cos δ k + jg kбU б sin δ k + bkбU б sin δ k ;
Сменим фазу, поскольку логичнее определять фазу относительно узла,
для которого пишем уравнение, т.е. cos α = cos(−α) , sin α = − sin( −α ) , и
разделим действительную и мнимую части. Для мнимой части еще сменим
знак. В результате получаем:
(U'д − jU"д ) ⋅ (GU'− jBU'+ jGU"+BU") =
.
P − jQ − (U' д G б − jU' д B б − jU"д G б − U"д B б ) ⋅ U б
Разделяем вещественную и мнимую части
U' д ⋅(GU'+ BU") − U"д ⋅(BU'−GU") = P − (U' д G б − U"д B б ) ⋅ U б ; ⎫
⎬ (4.5)
U' д ⋅(BU'−GU") + U"д ⋅(GU'+ BU") = Q − (U' д B б + U"д G б ) ⋅ U б .⎭
В развернутом виде
(
)
(
)
N
N
⎫
U ' k ∑ g kjU ' j +bkjU " j − U "k ∑ bkjU ' j − g kjU " j = ⎪
j =1
j =1
⎪
⎪⎪
= Pk − (U ' k g kб − U "k bkб )U б ;
⎬
N
N
U ' k ∑ bkjU ' j − g kjU " j + U "k ∑ g kjU ' j +bkjU " j =⎪
⎪
j =1
j =1
⎪
⎪⎭
= Qk − (U ' k bkб + U "k g kб )U б .
(
)
(
)
(4.5а)
4. Узловые уравнения УР в форме баланса мощностей в полярной
системе координат
Получим
из
(4.4),
умножив
(
)
каждое
уравнение
на
модуль
соответствующего узла
[
(
)]
N
⎫
U k ⋅ ∑ g kj cos δ k − δ j − bkj sin δ k − δ j ⋅ U j = ⎪
j =1
⎪
= Pk − U k U б ( g kб cos δ k − bkб sin δ k ); ⎪⎪
⎬
N
U k ⋅ ∑ g kj sin δ k − δ j + bkj cos δ k − δ j ⋅ U j = ⎪
⎪
j =1
⎪
= Qk − U k U б ( g kб sin δ k + bkб cos δ k ) ⎭⎪
[
(
)
(
)]
(4.6)
ЛЕКЦ. 2-6: ФОРМЫ ЗАПИСИ УРАВНЕНИЙ УСТАНОВИВШЕГОСЯ
РЕЖИМА ДЛЯ ОБЩЕГО СЛУЧАЯ ЗАДАНИЯ ИСХОДНЫХ ДАННЫХ
(ПРОДОЛЖЕНИЕ ТЕМЫ)
Сделаем выводы по 4 формам записи СНАУ установившегося режима
электрической
сети,
каждая
из
которых
имеет
свои
преимущества,
итерационного процесса по мере приближения к решению, поэтому
градиентный метод не нашел самостоятельного применения для решения
узловых
уравнений
установившегося
режима.
Зато
метод
Ньютона
применяется как стандартный, т.к. он характеризуется быстрой сходимостью.
определяющие область ее рационального применения:
1) Узловые уравнения в форме баланса токов в прямоугольной СК
Тема: Решение системы нелинейных уравнений методом Ньютона
линейны слева (преимущество), следовательно, их можно решать с помощью
итерационных методов. То есть, если есть программа, реализующая
Идея метода Ньютона
итерационный процесс, то предпочтительнее сформировать узловые уравнения
в форме баланса токов в прямоугольной СК.
Метод Ньютона пригоден для решения обширного класса нелинейных
задач. Идея его заключается в последовательной линеаризации системы
2) Уравнения в форме баланса мощностей позволяют относительно
просто учитывать разное задание исходных данных для нагрузочных и
генераторных узлов (генераторный Pi, Ui, нагрузочный Pi, Qi). То есть для
нелинейных уравнений на каждом шаге итерации. Решение линеаризованной
системы дает значение неизвестных, которое ближе к решению, чем
предыдущее приближение.
генераторного узла достаточно заменить уравнение баланса реактивной
мощности во втором уравнении формы 3 (выражения 4.5) на уравнения
(U' k )
2
+ (U"k )
2
Проиллюстрируем идею на примере одного нелинейного уравнения и в
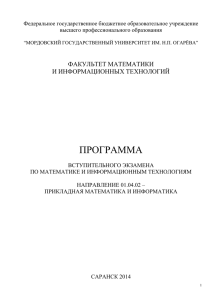
графике. Нужно решить уравнение
= U 2k .
w( x) = 0 .
x , в которой кривая w( x)
Графически его решение – это точка ~
3) Наиболее просто осуществляется такой учет в уравнениях формы 4,
т.е. в форме баланса мощностей в полярной СК. Для генераторных узлов в
этой
системе
уравнений
надо
просто
исключить
уравнения
баланса
проходит через 0 (см. рис.).
w(x)
Зададим
реактивных мощностей.
тригонометрические
функции,
что
увеличивает
объем
Уравнение
w(x)
и
линеаризуем
трудоемкость вычислений при их решении.
Полученные
уравнения
начальное
приближение х<0>
Общий недостаток для всех форм – уравнения трансцендентны, т.е.
содержат
(1)
содержат
<0>
точки х
дифференцируемые
функции,
в
(1)
окрестности
, то есть на графике
проводим касательную к точке
следовательно, для решения можно применять градиентный метод и метод
х<0>. Из рисунка видно
Ньютона. Основной недостаток градиентных методов – медленная сходимость
0
x
~x
x
<2>
x
<1>
<0>
x
tgα =
w< 0 >
x < 0 > − x <1>
x < 0 > − x <1> =
W1 ( x1 , x 2 ,.., x N ) = 0; ⎫
⎪
W2 ( x1 , x 2 ,.., x N ) = 0; ⎪
⎬
...
⎪
W N ( x1 , x 2 ,.., x N ) = 0,⎪⎭
или
<0>
w
.
tgα
(
)
где Wi – дифференцируемые функции переменных xi.
∂w x <0 >
.
В то же время по определению tgα =
∂x
В матричном виде
( )
( )
(2)
x
=x
( )
−
∂w(x < i > )
w x <i >
Ньютона состоит в линеаризации системы уравнений в точке заданного
приближения X < i > , затем полученная СЛАУ решается, получаем X < i +1> .
Линеаризация производится путем разложения вектор-функции в ряд Тейлора
Обобщим выражение (2) для любого шага итерации:
<i >
и отбрасывания членов разложения порядка выше первого. То есть
(3)
итерационная формула метода Ньютона имеет вид
∂x
W(X (i ) ) +
Итерационный процесс сходится, если функция w( x) становится
близкой к 0. Сходимость считается достигнутой, а итерационный процесс
законченным, если абсолютная величина невязки (небаланса) меньше
заданной.
Далее рассмотрим применение идеи для решения не обного уравнения,
где
∂W(X (i ) )
ΔX (i ) = 0 ,
∂X
(5.3)
⎫⎪
∂W ⎧⎪ ∂Wi
=⎨
, i, j = 1..N ⎬ – квадратная матрица частных производных
∂X ⎪⎩ ∂X j
⎪⎭
или иначе матрица Якоби; ΔX (i ) = X (i +1) − X (i )
Выражение (5.3) представляет собой СЛАУ вида
а системы.
∂W(X (i ) )
ΔX (i ) = − W(X (i ) )
∂X
Решение СНАУ методом Ньютона.
Имеем систему нелинейных уравнений в общем виде
(5.2)
Аналогично алгоритму решения одного уравнения суть метода
<0>
< i +1 >
W(X) = 0 ,
где W, X– вектор-функция и вектор переменных.
После несложных преобразований получим
wx
x <1> = x < 0 > −
∂w x < 0 >
∂x
(5.1)
(5.4)
с неизвестными ΔX (i ) .
Решение существует при условии, что матрица коэффициентов
(матрица Якоби) не особенная, т.е. определитель матрицы (якобиан) не равен
нулю.
Оценка условий сходимости итерационного процесса метода Ньютона.
X
Предположим, что решение (5.2) существует и равно Х*, т.е.
(i +1)
W(X*) ≡ 0 . Разложим W(X) в ряд Тейлора в точке некоторого приближения
X
(i )
= X * −ε
(i )
Следовательно,
и W(X*) определим как
W(X*) = W(X (i ) ) +
где ε
(i )
∂W(X (i ) ) (i ) 1 ∂ 2 W(X (i ) ) (i ) (i )
ε ε = 0,
ε +
2
∂X
∂X 2
(5.5)
(i )
;
⎧⎪ ∂ 2W
⎫⎪
i
, i, j , l = 1..N ⎬ – кубическая матрица (N×N×N), матрица
=⎨
⎪⎭
∂X 2 ⎪⎩ ∂X j ∂X l
∂2W
⎡ ∂W(X (i ) ) ⎤
X (i +1) = X (i ) − ⎢
⎥
⎢⎣ ∂X ⎥⎦
W(X (i ) ) .
(5.6)
приближения
равна
получим (i+1)-е приближение, погрешность которого
ε
(i +1)
=X
(i +1)
1 ⎡ ∂W(X (i ) ) ⎤
−X = ⎢
⎥
2 ⎣⎢ ∂X ⎦⎥
*
−1
∂ 2 W(X (i ) ) (i ) (i )
ε ε .
∂X 2
(5.7)
Из (5.7) следует, что
1) условия сходимости метода Ньютона зависят
приближения к решению. При этом погрешность последующего приближения
связана с погрешностью предыдущего решения квадратичной зависимостью. В
первый член, запишем
этом смысле говорят о квадратичной сходимости метода Ньютона.
2) по мере приближения к решению сходимость резко ускоряется.
−1
W(X
(i )
)=ε
(i )
1 ⎡ ∂W(X (i ) ) ⎤
+ ⎢
⎥
2 ⎣⎢ ∂X ⎦⎥
−1
∂ 2 W(X (i ) ) (i ) (i )
ε ε .
∂X 2
Подставим последнее выражение в (5.6)
=X
i-того
б) от близости предыдущего, а в конечном итоге начального
−1
Из (5.5), поделив все члены уравнения на матрицу Якоби и выразив
X
погрешность
искомым параметрам;
Согласно (5.3)
(i )
если
∂ 2 W(X (i ) ) (i ) (i )
ε ε .
∂X 2
а) от значений первых и вторых производных функций невязок по
вторых производных или матрица Гессе.
⎡ ∂W(X (i ) ) ⎤
−⎢
⎥
⎣⎢ ∂X ⎦⎥
−1
ε (i ) = X* − X (i ) , то после выполнения шага итерации по методу Ньютона
– некоторый вектор, компоненты которого зависят от Х* и X
(i +1)
1 ⎡ ∂W(X (i ) ) ⎤
=X + ⎢
⎥
2 ⎣⎢ ∂X ⎦⎥
*
+ε
(i )
1 ⎡ ∂W(X (i ) ) ⎤
+ ⎢
⎥
2 ⎣⎢ ∂X ⎦⎥
или, если учесть X (i ) + ε (i ) = X *
−1
3) при задании начального приближения достаточно далеко от решения
итерационный процесс метода Ньютона может быть расходящимся.
Для устранения недостатка п.3 рассмотрим далее подходы для
обеспечения надежности сходимости итерационного процесса.
∂ 2 W(X (i ) ) (i ) (i )
ε ε
∂X 2
ЛЕКЦ. 2-7: РЕШЕНИЕ СИСТЕМЫ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
МЕТОДОМ НЬЮТОНА (ПРОДОЛЖЕНИЕ ТЕМЫ)
Подходы,
обеспечивающие
увеличение
надежности
сходимости
итерационного процесса метода Ньютона.
В
теории
оптимизации
доказано
положение:
сумм
квадратов
решения
уравнений
небалансов
Тема:
Применение
метода
Ньютона
для
установившегося режима электрической системы
Лекц. 2-8: Применение метода Ньютона для решения уравнений
установившегося режима электрической системы (продолжение темы)
В
предыдущей
лекции
мы
получили
первое
уравнение
для
вычислительного алгоритма метода Ньютона в форме баланса токов в
прямоугольной СК. Этого достаточно для понимания методики вывода
расчетных формул. Поэтому далее мы просто запишем формулы для
итерационного процесса метода Ньютона в различных формах и отметим
особенности каждой из форм.
Вычислительные алгоритмы метода Ньютона для различных форм
Узловые уравнения в форме баланса токов в прямоугольной СК
Вычислительная схема итерационного процесса
⎡ ∂W'
⎢ ∂U'
⎢ ∂W"
⎢
⎣ ∂U'
∂W' ⎤
∂U" ⎥ ⋅ ⎡ ΔU' ⎤ = − ⎡ W' ⎤ .
⎢ W"⎥
∂W" ⎥ ⎢⎣ΔU"⎥⎦
⎣
⎦
⎥
∂U" ⎦
В матричной форме составляющие имеют вид (7.1,а)
∂W' (U' , U" )
= G − U д− 2 Pд + 2U' 2д U −д 4 Pд + 2U"д U' д U −д 4 Q д −
∂U'
∂Pд
∂Q д
;
− U' 2д U −д 3
− U"д U' д U д− 3
∂U
∂U
∂W' (U' , U" )
= B − U д− 2 Q д + 2U' д U"д U д− 4 Pд + 2U"2д U д− 4 Q д −
∂U"
∂Pд
∂Q д
;
− U' д U"д U −д 3
− U"2д U −д 3
∂U
∂U
∂W" (U' , U" )
= −B + U д− 2 Q д − 2U' 2д U д− 4 Q д + 2U"д U' д U д− 4 Pд +
∂U'
∂Q д
∂Pд
;
+ U' 2д U −д 3
− U"д U' д U д− 3
∂U
∂U
∂W" (U' , U" )
= G − U д− 2 Pд − 2U' д U"д U д− 4 Q д + 2U"2д U −д 4 Pд +
∂U"
∂Q д
∂Pд
.
+ U' д U"д U −д 3
− U"2д U −д 3
∂U
∂U
В развернутой форме (7.1,б)
∂W 'i
Pi
PiU 'i2
QiU 'i U "i U 'i2 ∂Pi U 'i U "i ∂Qi
= g ii −
+2
−2
−
−
;
∂U 'i
U i2
U i4
U i4
U i3 ∂U i
U i3 ∂U i
∂W 'i
= g ij ;
∂U ' j
∂W 'i
Qi
PiU 'i U "i
QiU "i2 U 'i U "i ∂Pi U 'i2 ∂Qi
= bii −
+2
+2
−
−
;
∂U "i
U i2
U i4
U i4
U i3 ∂U i U i3 ∂U i
∂W 'i
= bij ;
∂U " j
Qi
QiU 'i2
PiU 'i U "i U 'i2 ∂Qi U 'i U "i ∂Pi
∂W "i
;
−
= −bii +
−2
+2
+
∂U 'i
U i2
U i4
U i4
U i3 ∂U i
U i3 ∂U i
∂W "i
= −bij ;
∂U ' j
Производные брать достаточно сложно, поскольку в выражениях есть
трансцендентные функции. Должны получиться элементы
в развернутом виде (только) (7.2):
Q
∂W Pi
= −WQi − i ;
Ui
∂δ i
Pi
QiU 'i U "i
PiU "i2 U 'i U "i ∂Qi U "i2 ∂Pi
∂W "i
;
= g ii −
−2
+2
+
−
∂U "i
U i2
U i4
U i4
U i3 ∂U i U i3 ∂U i
∂W Pi
= g ij sin δ i − δ j + bij cos δ i − δ j ⋅ U j ;
∂δ j
∂W "i
= g ij .
∂U " j
P
∂W Pi
1 ∂Pi
= g ii + i −
;
∂U i
U i2 U i ∂U i
[
Выводы:
Недиагональные
элементы
блоков
матрицы
Якоби
(
(
соответствующим элементам матриц G и B, диагональные равны сумме
4N).
∂WQi
∂δ j
[
(
∂WQi
∂U i
∂WQi
Узловые уравнения в форме баланса токов в полярной СК
∂U j
Исходными для взятия производных являются уравнения (4.4).
⎡ ∂WP
⎢ ∂δ
⎢ ∂W
Q
⎢
⎢⎣ ∂δ
∂WP ⎤
∂U ⎥ ⋅ ⎡ Δδ ⎤ = − ⎡ WP ⎤ .
⎢W ⎥
∂WQ ⎥ ⎢⎣ΔU ⎥⎦
⎥
⎣ Q⎦
⎥
∂U ⎦
)
)
)]
(
= − g ij cos δ i − δ j + bij sin δ i − δ j ⋅ U j ;
Недостаток – сложность учета генераторных узлов.
Вычислительная схема итерационного процесса
(
P
= W Pi + i ;
∂δ i
Ui
Следовательно, надо рассчитывать 4N диагональных элементов.
прямоугольной СК – относительно малый объем вычислений (вместо N
)
∂WQi
слагаемых, их которых 5 зависят от искомых параметров U’ и U”.
2→
)]
(
∂W Pi
= g ij cos δ i − δ j − bij sin δ i − δ j ;
∂U j
равны
Таким образом, основное достоинство записи в форме баланса токов в
)
= bii +
Qi
U i2
(
)
−
1 ∂Qi
;
U i ∂U i
(
)
= g ij sin δ i − δ j + bij cos δ i − δ j .
Выводы:
Преимущество этой формы – простой учет генераторный узлов,
заданных значениями Р и U. Для этого модули напряжений этих узлов надо
исключит из состава переменных, и из уравнений – соответствующие
уравнения баланса реактивной мощности.
Основной недостаток – большой объем вычислений, выполняемых на
∂WQi
итерации, что связано с необходимостью пересчета всех (как диагональных,
∂U ' j
так и недиагональных) элементов матрицы Якоби, в состав которых входят
выражения с тригонометрическими функциями.
∂WQi
∂U "i
N
j =1
∂WQi
Вычислительная схема итерационного процесса
∂U " j
∂WP ⎤
∂U" ⎥ ⋅ ⎡ ΔU' ⎤ = − ⎡ WP ⎤ .
⎢W ⎥
∂WQ ⎥ ⎢⎣ΔU"⎥⎦
⎥
⎣ Q⎦
⎥
U"
∂
⎦
= − g ijU 'i +bijU "i .
Недостатком данных уравнений по сравнению с уравнениями баланса
токов в прямоугольной СК является большой объем вычислений, т.к. на
делать в матричной форме, исходя из уравнений (4.5) по алгоритму, как
рассматривали на предыдущей лекции. Имеем (7.3)
каждой итерации необходимо пересчитывать всю матрицу Якоби, т.к. все
элементы зависят от U’ и U”.
Но есть и преимущества:
)
N
U ' ∂Pi
∂W Pi
;
= ∑ g ijU ' j +bijU " j + g iiU "i −biiU 'i + g бiU б − i
∂U 'i
∂
U
j =1
i
Ui
во-первых, легче учитывать генераторные узлы, для них надо заменить
уравнения баланса реактивной мощности уравнениями
U 'i2 +U "i2 −U i2 = 0 ;
∂W Pi
= g ijU 'i −bijU "i ;
∂U ' j
(
U "i ∂Qi
;
U i ∂U i
Выводы:
Составляющие сразу запишем в развернутом виде, хотя вывод надо бы
(
)
= ∑ g ijU ' j +bijU " j − g iiU 'i +biiU "i + g бiU б −
Узловые уравнения в форме баланса мощностей в прямоугольной СК
⎡ ∂WP
⎢ ∂U'
⎢ ∂W
Q
⎢
⎢⎣ ∂U'
(
= bijU 'i + g ijU "i ;
во-вторых, поскольку в реальных электрических системах напряжения
)
узлов обычно не имеют больших фазовых сдвигов относительно базисного
N
∂W Pi
U " ∂Pi
;
= ∑ g ijU " j −bijU ' j + biiU 'i + g iiU "i −bбiU б − i
∂U "i
j =1
U i ∂U i
напряжения, т.е. обычно U”<U’, и кроме того, линии электропередач
∂W Pi
= bijU 'i + g ijU "i ;
∂U " j
блоков главной диагонали матрицы Якоби, определяемыми выражениями (7.2-
∂WQi
∂U 'i
N
(
)
= ∑ − g ijU " j +bijU ' j + biiU 'i + g iiU "i +bбiU б −
j =1
напряжением выше 220 кВ характеризуются r<<х, т.е. g>>b, то элементами
1,2,7,8), можно пренебречь (считать их нулевыми) по сравнению с остальными
U 'i ∂Qi
;
U ∂U i
i
элементами. Это позволяет существенно уменьшить объем вычислений на
каждой итерации. Поскольку, как известно, изменения в матрице Якоби
влияют только на сходимость метода Ньютона, то можно еще упростить
выражения, отбросив в оставшихся блоках слагаемые, содержащие U” и G.
∂WQi
Таким образом, составляющие матрицы Якоби примут вид:
∂WQi
∂WQi
∂W Pi
∂W Pi
= 0;
= 0;
= 0;
= 0;
∂U ' j
∂U ' j
∂U 'i
∂U 'i
(
∂δ i
∂WQi
∂δ j
)
N
U ' ∂Pi ∂W Pi
∂WPi
;
= bijU 'i ;
= ∑ − bijU ' j + biiU 'i −bбiU б − i
∂U "i
j =1
U i ∂U i ∂U " j
∂WQi
∂U 'i
N
(
)
= ∑ bijU ' j + biiU 'i +bбiU б −
j =1
(
∂U i
U 'i ∂Qi ∂WQi
;
= bijU 'i ;
U i ∂U i ∂U ' j
)
)]
(
= − g ij cos δ i − δ j + bij sin δ i − δ j ⋅ U i ⋅ U j ;
∂WQi
∂WQi
∂U j
Узловые уравнения в форме баланса мощностей в полярной СК
[
=
WQi + Qi
∂Qi
;
+ biiU i −
Ui
∂U i
(
)
(
)]
= g ij sin δ i − δ j + bij cos δ i − δ j ⋅ U i .
Выводы:
Вычислительная схема итерационного процесса
⎡ ∂WP
⎢ ∂δ
⎢ ∂W
Q
⎢
⎢⎣ ∂δ
[
= W Pi + Pi ;
Особенности этой формы записи уравнений те же, что и для уравнений
∂WP ⎤
∂U ⎥ ⋅ ⎡ Δδ ⎤ = − ⎡ WP ⎤ .
⎢W ⎥
∂WQ ⎥ ⎢ΔU ⎥
⎥ ⎣ ⎦
⎣ Q⎦
∂U ⎦⎥
баланса токов в полярной СК: простой учет генераторных узлов, большой
объем вычислений на итерации. Однако здесь, как и в форме 3, учет реальных
факторов электрических схем позволяют существенно уменьшить объем
Элементы блоков матрицы Якоби рассчитываются по выражениям:
вычислений на итерации путем отбрасывания недиагональных блоков
матрицы Якоби.
(7.4)
Тема: Модификации метода Ньютона (при реализации вычислительных
∂W Pi
= −WQi − Qi ;
∂δ i
[
(
)
алгоритмов)
)]
(
∂W Pi
= g ij sin δ i − δ j + bij cos δ i − δ j ⋅ U i ⋅ U j ;
∂δ j
∂W Pi W Pi + Pi
∂P
=
+ g iiU i − i ;
∂U i
Ui
∂U i
[
(
)
(
Для каждой из форм записи уравнений установившегося режима
можно применить разную реализацию вычислительных алгоритмов, т. е.
разные модификации метода Ньютона. Рассмотрим их для системы узловых
уравнений установившегося режима в форме баланса мощности в полярной
системе координат.
)]
∂W Pi
= g ij cos δ i − δ j − bij sin δ i − δ j ⋅ U i ;
∂U j
Почему именно в такой форме? Еще раз посмотрите выводы по формам
вычислительных алгоритмов. 4-я – самая удобная, позволяет учесть разное
задание генераторных узлов и в то же время упростить выражения с учетом
реальных условий, уменьшить объем вычислений на шаге итерации.
Метод Ньютона-Рафсона.
1. На каждой итерации
К зачету: первые 12 вопросов – безусловный минимум, без конспектов;
все последующие вопросы: устно, пользоваться своими конспектами, но
необходимо объяснить сущность вопроса, значение величин, входящих в
формулы. Если кто-то не успеет ответить устно, дополнительно на следующей
паре = лаб. работы у одной подгруппы.
Лекц. 2-8: Применение метода Ньютона для решения уравнений
установившегося режима электрической системы (продолжение темы)
В
предыдущей
лекции
мы
получили
первое
уравнение
для
вычислительного алгоритма метода Ньютона в форме баланса токов в
прямоугольной СК. Этого достаточно для понимания методики вывода
расчетных формул. Поэтому далее мы просто запишем формулы для
итерационного процесса метода Ньютона в различных формах и отметим
особенности каждой из форм.
Вычислительные алгоритмы метода Ньютона для различных форм
Узловые уравнения в форме баланса токов в прямоугольной СК
Вычислительная схема итерационного процесса
⎡ ∂W'
⎢ ∂U'
⎢ ∂W"
⎢
⎣ ∂U'
∂W' ⎤
∂U" ⎥ ⋅ ⎡ ΔU' ⎤ = − ⎡ W' ⎤ .
⎢ W"⎥
∂W" ⎥ ⎢⎣ΔU"⎥⎦
⎣
⎦
⎥
∂U" ⎦
В матричной форме составляющие имеют вид (7.1,а)
∂W' (U' , U" )
= G − U д− 2 Pд + 2U' 2д U д− 4 Pд + 2U"д U' д U д− 4 Q д −
∂U'
∂Q д
∂Pд
;
− U"д U' д U д− 3
− U' 2д U д− 3
∂U
∂U
∂W' (U' , U" )
= B − U д− 2 Q д + 2U' д U"д U д− 4 Pд + 2U"2д U д− 4 Q д −
∂U"
∂Q д
∂Pд
;
− U"2д U д− 3
− U' д U"д U д− 3
∂U
∂U
∂W" (U' , U" )
= −B + U д− 2 Q д − 2U' 2д U д− 4 Q д + 2U"д U' д U −д 4 Pд +
∂U'
∂Pд
∂Q д
;
− U"д U' д U −д 3
+ U' 2д U −д 3
∂U
∂U
∂W" (U' , U" )
= G − U д− 2 Pд − 2U' д U"д U д− 4 Q д + 2U"2д U −д 4 Pд +
∂U"
∂Pд
∂Q д
.
− U"2д U −д 3
+ U' д U"д U −д 3
∂U
∂U
В развернутой форме (7.1,б)
Pi
PiU 'i2
QiU 'i U "i U 'i2 ∂Pi U 'i U "i ∂Qi
∂W 'i
;
−
= g ii −
+2
−2
−
∂U 'i
U i2
U i4
U i4
U i3 ∂U i
U i3 ∂U i
∂W 'i
= g ij ;
∂U ' j
Qi
PiU 'i U "i
QiU "i2 U 'i U "i ∂Pi U 'i2 ∂Qi
∂W 'i
;
−
= bii −
+2
+2
−
∂U "i
U i2
U i4
U i4
U i3 ∂U i U i3 ∂U i
∂W 'i
= bij ;
∂U " j
Qi
QiU 'i2
PiU 'i U "i U 'i2 ∂Qi U 'i U "i ∂Pi
∂W "i
;
−
= −bii +
−2
+2
+
∂U 'i
U i2
U i4
U i4
U i3 ∂U i
U i3 ∂U i
∂W "i
= −bij ;
∂U ' j
Производные брать достаточно сложно, поскольку в выражениях есть
трансцендентные функции. Должны получиться элементы
в развернутом виде (только) (7.2):
∂W Pi
Q
= −WQi − i ;
∂δ i
Ui
Pi
QiU 'i U "i
PiU "i2 U 'i U "i ∂Qi U "i2 ∂Pi
∂W "i
;
−
= g ii −
−2
+2
+
∂U "i
U i2
U i4
U i4
U i3 ∂U i U i3 ∂U i
∂W Pi
= g ij sin δ i − δ j + bij cos δ i − δ j ⋅ U j ;
∂δ j
∂W "i
= g ij .
∂U " j
P
∂W Pi
1 ∂Pi
= g ii + i −
;
∂U i
U i2 U i ∂U i
[
Выводы:
Недиагональные
элементы
блоков
матрицы
Якоби
(
(
соответствующим элементам матриц G и B, диагональные равны сумме
4N).
∂WQi
∂δ j
[
(
∂WQi
∂U i
∂WQi
Узловые уравнения в форме баланса токов в полярной СК
∂U j
Исходными для взятия производных являются уравнения (4.4).
⎡ ∂WP
⎢ ∂δ
⎢ ∂W
Q
⎢
⎢⎣ ∂δ
∂WP ⎤
∂U ⎥ ⋅ ⎡ Δδ ⎤ = − ⎡ WP ⎤ .
⎢W ⎥
∂WQ ⎥ ⎢⎣ΔU ⎥⎦
⎥
⎣ Q⎦
⎥
∂U ⎦
)
)
)]
(
= − g ij cos δ i − δ j + bij sin δ i − δ j ⋅ U j ;
Недостаток – сложность учета генераторных узлов.
Вычислительная схема итерационного процесса
(
P
= W Pi + i ;
Ui
∂δ i
Следовательно, надо рассчитывать 4N диагональных элементов.
прямоугольной СК – относительно малый объем вычислений (вместо N
)
∂WQi
слагаемых, их которых 5 зависят от искомых параметров U’ и U”.
2→
)]
(
∂W Pi
= g ij cos δ i − δ j − bij sin δ i − δ j ;
∂U j
равны
Таким образом, основное достоинство записи в форме баланса токов в
)
= bii +
Qi
U i2
(
)
−
1 ∂Qi
;
U i ∂U i
(
)
= g ij sin δ i − δ j + bij cos δ i − δ j .
Выводы:
Преимущество этой формы – простой учет генераторный узлов,
заданных значениями Р и U. Для этого модули напряжений этих узлов надо
исключит из состава переменных, и из уравнений – соответствующие
уравнения баланса реактивной мощности.
Основной недостаток – большой объем вычислений, выполняемых на
∂WQi
итерации, что связано с необходимостью пересчета всех (как диагональных,
∂U ' j
так и недиагональных) элементов матрицы Якоби, в состав которых входят
выражения с тригонометрическими функциями.
∂WQi
∂U "i
N
j =1
∂WQi
Вычислительная схема итерационного процесса
∂U " j
∂WP ⎤
∂U" ⎥ ⋅ ⎡ ΔU' ⎤ = − ⎡ WP ⎤ .
⎢W ⎥
∂WQ ⎥ ⎢⎣ΔU"⎥⎦
⎥
⎣ Q⎦
⎥
∂U" ⎦
= − g ijU 'i +bijU "i .
Недостатком данных уравнений по сравнению с уравнениями баланса
токов в прямоугольной СК является большой объем вычислений, т.к. на
делать в матричной форме, исходя из уравнений (4.5) по алгоритму, как
рассматривали на предыдущей лекции. Имеем (7.3)
каждой итерации необходимо пересчитывать всю матрицу Якоби, т.к. все
элементы зависят от U’ и U”.
Но есть и преимущества:
)
N
U ' ∂Pi
∂W Pi
;
= ∑ g ijU ' j +bijU " j + g iiU "i −biiU 'i + g бiU б − i
∂
U
∂U 'i
j =1
i
Ui
во-первых, легче учитывать генераторные узлы, для них надо заменить
уравнения баланса реактивной мощности уравнениями
U 'i2 +U "i2 −U i2 = 0 ;
∂W Pi
= g ijU 'i −bijU "i ;
∂U ' j
(
U "i ∂Qi
;
U i ∂U i
Выводы:
Составляющие сразу запишем в развернутом виде, хотя вывод надо бы
(
)
= ∑ g ijU ' j +bijU " j − g iiU 'i +biiU "i + g бiU б −
Узловые уравнения в форме баланса мощностей в прямоугольной СК
⎡ ∂WP
⎢ ∂U'
⎢ ∂W
Q
⎢
⎢⎣ ∂U'
(
= bijU 'i + g ijU "i ;
во-вторых, поскольку в реальных электрических системах напряжения
)
узлов обычно не имеют больших фазовых сдвигов относительно базисного
N
U " ∂Pi
∂W Pi
;
= ∑ g ijU " j −bijU ' j + biiU 'i + g iiU "i −bбiU б − i
∂U "i
j =1
U i ∂U i
напряжения, т.е. обычно U”<U’, и кроме того, линии электропередач
∂W Pi
= bijU 'i + g ijU "i ;
∂U " j
блоков главной диагонали матрицы Якоби, определяемыми выражениями (7.2-
∂WQi
∂U 'i
N
(
)
= ∑ − g ijU " j +bijU ' j + biiU 'i + g iiU "i +bбiU б −
j =1
напряжением выше 220 кВ характеризуются r<<х, т.е. g>>b, то элементами
1,2,7,8), можно пренебречь (считать их нулевыми) по сравнению с остальными
U 'i ∂Qi
;
U ∂U i
i
элементами. Это позволяет существенно уменьшить объем вычислений на
каждой итерации. Поскольку, как известно, изменения в матрице Якоби
влияют только на сходимость метода Ньютона, то можно еще упростить
выражения, отбросив в оставшихся блоках слагаемые, содержащие U” и G.
∂WQi
Таким образом, составляющие матрицы Якоби примут вид:
∂WQi
∂WQi
∂W Pi
∂W Pi
= 0;
= 0;
= 0;
= 0;
∂U 'i
∂U ' j
∂U ' j
∂U 'i
(
∂δ i
∂WQi
∂δ j
)
N
U ' ∂Pi ∂W Pi
∂WPi
;
= bijU 'i ;
= ∑ − bijU ' j + biiU 'i −bбiU б − i
∂U "i
j =1
U i ∂U i ∂U " j
∂WQi
∂U 'i
N
(
)
= ∑ bijU ' j + biiU 'i +bбiU б −
j =1
(
∂U i
U 'i ∂Qi ∂WQi
;
= bijU 'i ;
U i ∂U i ∂U ' j
)
)]
(
= − g ij cos δ i − δ j + bij sin δ i − δ j ⋅ U i ⋅ U j ;
∂WQi
∂WQi
∂U j
Узловые уравнения в форме баланса мощностей в полярной СК
[
=
WQi + Qi
∂Qi
;
+ biiU i −
Ui
∂U i
(
)
(
)]
= g ij sin δ i − δ j + bij cos δ i − δ j ⋅ U i .
Выводы:
Вычислительная схема итерационного процесса
⎡ ∂WP
⎢ ∂δ
⎢ ∂W
Q
⎢
⎢⎣ ∂δ
[
= W Pi + Pi ;
Особенности этой формы записи уравнений те же, что и для уравнений
∂WP ⎤
∂U ⎥ ⋅ ⎡ Δδ ⎤ = − ⎡ WP ⎤ .
⎢W ⎥
∂WQ ⎥ ⎢ΔU ⎥
⎥ ⎣ ⎦
⎣ Q⎦
∂U ⎦⎥
баланса токов в полярной СК: простой учет генераторных узлов, большой
объем вычислений на итерации. Однако здесь, как и в форме 3, учет реальных
факторов электрических схем позволяют существенно уменьшить объем
Элементы блоков матрицы Якоби рассчитываются по выражениям:
вычислений на итерации путем отбрасывания недиагональных блоков
матрицы Якоби.
(7.4)
∂W Pi
= −WQi − Qi ;
∂δ i
[
(
)
)]
(
∂W Pi
= g ij sin δ i − δ j + bij cos δ i − δ j ⋅ U i ⋅ U j ;
∂δ j
∂W Pi W Pi + Pi
∂P
=
+ g iiU i − i ;
∂U i
Ui
∂U i
[
(
)
(
Тема: Модификации метода Ньютона (при реализации вычислительных
алгоритмов)
Для каждой из форм записи уравнений установившегося режима
)]
∂W Pi
= g ij cos δ i − δ j − bij sin δ i − δ j ⋅ U i ;
∂U j
можно применить разную реализацию вычислительных алгоритмов, т. е.
разные модификации метода Ньютона. Рассмотрим их для системы узловых
уравнений установившегося режима в форме баланса мощности в полярной
системе координат.
Почему именно в такой форме? Еще раз посмотрите выводы по формам
вычислительных алгоритмов. 4-я – самая удобная, позволяет учесть разное
задание генераторных узлов и в то же время упростить выражения с учетом
реальных условий, уменьшить объем вычислений на шаге итерации.
Метод Ньютона-Рафсона.
1. На каждой итерации
К зачету: первые 12 вопросов – безусловный минимум, без конспектов;
все последующие вопросы: устно, пользоваться своими конспектами, но
мощности.
3. Вычислить для начального приближения вектор небалансов
⎡ WP ⎤
⎥ , формулу для которого нужно получить из уравнений (4.6)
⎣ WQ ⎦
мощностей ⎢
путем переноса всех величин в левую часть равенства.
4. Для текущего шага итерации вычислить матрицу Якоби (получить
числовые значения, подставив значения решения из предыдущего шага в
уравнения (7.4))
необходимо объяснить сущность вопроса, значение величин, входящих в
∂W( X
∂X
формулы. Если кто-то не успеет ответить устно, дополнительно на следующей
паре = лаб. работы у одной подгруппы.
(i )
⎡ ∂WP
) ⎢ ∂δ
= ⎢ ∂W
Q
⎢
⎢⎣ ∂δ
∂WP ⎤
∂U ⎥ .
∂WQ ⎥
⎥
∂U ⎥⎦
5. Решить систему уравнений
Лекц. 2-9: Тема: Модификации метода Ньютона
⎡ ∂WP
⎢ ∂δ
⎢ ∂W
Q
⎢
⎢⎣ ∂δ
(при реализации вычислительных алгоритмов)
Для каждой из форм записи уравнений установившегося режима
можно применить разную реализацию вычислительных алгоритмов, т. е.
∂WP ⎤
∂U ⎥ ⋅ ⎡ Δδ ⎤ = − ⎡ WP ⎤ ,
⎢W ⎥
∂WQ ⎥ ⎢ΔU ⎥
⎥ ⎣ ⎦
⎣ Q⎦
∂U ⎦⎥
(1)
разные модификации метода Ньютона. Рассмотрим их для системы узловых
подставив подсчитанные ранее числовые значения, методом Гаусса.
уравнений установившегося режима в форме баланса мощности в полярной
6. Найти значения искомых величин X (i +1) = X (i ) + ΔX (i ) .
системе координат.
7. Подсчитать значения составляющих вектора небалансов. Величину
(2)
Почему именно в такой форме? Еще раз посмотрите выводы по формам
максимального небаланса сравнить с заданной по точности. Если требуемая
вычислительных алгоритмов. 4-я – самая удобная, позволяет учесть разное
точность не обеспечена, вернуться к п. 4, если достигнута, выйти из
задание генераторных узлов и в то же время упростить выражения с учетом
итерационного процесса, перейти к п.8.
реальных условий, уменьшить объем вычислений на шаге итерации.
1).Метод Ньютона-Рафсона.
1. Задать начальные приближения решения СНАУ.
2. Задать точность получаемого решения по величине небаланса
8. Вывод решения. Конец расчета.
Выводы: удобно для расчетов "вручную", понятно. Полный алгоритм.
Много расчетов.
2) Метод Ньютона с обращением матрицы Якоби.
Выполнить пп.1-4 предыдущего метода.
5) Метод Ньютона с блочной диагонализацией
5. Решить СНАУ в виде
⎡ ∂WP
⎡ Δδ ⎤ ⎢ ∂δ
⎢ΔU ⎥ = ⎢ ∂WQ
⎣
⎦ ⎢
⎣⎢ ∂δ
∂WP ⎤
∂U ⎥
∂WQ ⎥
⎥
∂U ⎦⎥
−1
С учетом реальных
⎛ ⎡ WP ⎤ ⎞
⎟,
⋅⎜− ⎢
⎜ WQ ⎥ ⎟
⎦⎠
⎝ ⎣
(3)
электрических систем можно пренебречь недиагональными элементами
матрицы Якоби, полагая их равными нулю. Таким образом итерационная
формула метода примет вид
Эта форма записи удобнее для решения в среде MathCAD.
⎡ ∂WP
⎢ ∂δ
⎢
⎢ 0
⎣⎢
Выполнить пп.6-8 предыдущего метода.
Выводы: вручную невозможно, зато для небольших порядков быстро и
точно с помощью компьютера (MathCAD).
СНАУ вида (1) решается на каждом шаге итерации либо методом
Гаусса (метод 1), либо путем обращения матрицы Якоби (метод 2), но новое
приближение переменных находят по выражению
где параметр t =
1
B
(i +1)
(4)
, отношение норм В(i+1) вычисляется по формуле (6.6).
Выводы: достоинства и недостатки обоих предыдущих методов.
Безусловное достоинство – обеспечение сходимости, но усложнение расчетов.
4) Модифицированный метод Ньютона.
Матрица Якоби вычисляется только один раз на первом шаге итерации.
На каждом шаге итерации вычисляется только вектор небалансов и после
решения системы уравнений либо методом Гаусса, либо путем обращения
матрицы Якоби.
Выводы: ухудшение сходимости (пояснить графически) итерационного
процесса, зато уменьшается объем расчетов.
⎤
0 ⎥ Δδ
⎡ WP ⎤
⎡ ⎤
⋅ ⎢ ⎥ = −⎢
⎥
⎥
∂WQ ⎣ΔU ⎦
⎥
⎣ WQ ⎦
∂U ⎦⎥
или в виде системы
3) Метод Ньютона по параметру
X (i +1) = X (i ) + t ⋅ ΔX (i ) ,
условий в нормальных условиях работы
⎧ ∂WP
⎪⎪ ∂δ Δδ = − WP ;
⎨
⎪ ∂WQ ΔU = − W
Q
⎪⎩ ∂U
(5)
Решить данную систему можно либо методом Гаусса или методом
обращения матрицы. Можно применить дополнительное упрощение для
вычислений: вычислять матрицу только на первом шаге итерации, но если
процесс не сходится, придется вводить параметр.
Алгоритм действий при упрощенном способе решения СНАУ методом
Ньютона с блочной диагонализацией:
(Матрица узловых проводимостей уже получена)
1. Составить уравнения небаланса активной и реактивной мощности
для каждого узла (исходные уравнения – форма 4.6).
2. Записать уравнения для производных – элементов матрицы Якоби из
уравнений 7.4, считая недиагональные элементы равными нулю.
3. Задать начальные приближения решения СНАУ.
4. Для начальных приближений вычислить элементы матрицы Якоби,
Лекция 3: Продолжение темы: УРАВНЕНИЯ СОСТОЯНИЯ УР ЭС
§ Обобщенный подход к формированию матричных уравнений состояния
подставив их величину в уравнения п.2.
электрической цепи
5. Задать точность получаемого решения по величине небаланса
мощности.
6. Вычислить для начального приближения величины небалансов
мощностей по формулам п.1.
7. Решить полученную систему линейных уравнений любым способом
(вручную, с помощью MathCAD, по программам), в результате получаем
План
Почему нужен
формализованный
подход к
составлению
систем уравнений
значения приращений искомых величин.
8. . Найти значения искомых величин на новом шаге итерации,
прибавив к значениям искомых величин полученные приращения.
9. Подсчитать значения небалансов активной и реактивной мощности
по формулам п.1. Величину максимального небаланса сравнить с заданной по
точности. Если требуемая точность не обеспечена, вернуться к п. 7, если
достигнута, выйти из итерационного процесса, перейти к п.10.
10. Вывод решения. Конец расчета.
В курсовой – составить СНАУ, решение должно быть получено двумя
путями: методом Зейделя и любой модификацией метода Ньютона (самый
простой – последний).
граф
подграф
путь графа
контур
связанный граф,
несвязанный
направленный
Программная реализация метода Зейделя
U k(i +1)
1 ⎛⎜ k −1
=
− ∑ YkjU (ji +1) −
⎜
Ykk
⎝ j =1
S*
YkjU (ji ) + *k(i )
Uk
j =k +1
n
∑
⎞
− Yбk U б ⎟
⎟
⎠
Схема замещения
Содержание
В современных схемах эл. систем десятки и даже
сотни узлов и ветвей, следовательно, количество
уравнений очень велико. Решений их невозможно
без применения ЭВМ. Более того, составление этих
уравнений – весьма трудоемкая задача, поэтому и ее
решение целесообразно возложить на ЭВМ. Для
этого требуется иметь формализованный подход к
составлению уравнений, который был бы одинаков
для схем любой конфигурации.
Такой подход м.б. разработан на основе
аналитического представления схемы замещения с
помощью теории графов
Теория графов – осн. понятия и определения
– множество вершин (узлов) и ребер (ветвей),
соединяющих некоторые пары вершин
– любая часть графа
–
совокупность
ребер,
соединяющих
две
произвольные вершины
– замкнутый путь графа, у которого начальная и
конечная вершины совпадают
– если любые две вершины соединяются путем;
– если хотя бы одна пара вершин не соединяется
путем
– если ребра графа имеют направление
как граф. Узлы=вершины, ветви=ребра. Обычно
граф направленный, все величины (эдс, ток, падение
напряжения)
считаются
совпадающими
с
направлением ребра графа. Любая из этих величин
может получиться как положительной, так и
отрицательной.
План
ПРИМЕР
Содержание
I
Z
E
a
I
1
I
e
Z
I
Z
I
E
I
Z
5
II
4
4
E
I E
I
Z
5
5
Z
I
6
I
3
I
I
6
4
3
b
6
nt
6
b
= 0 , откуда Мб=-nt M
ветви j,
mij = 0 , если узел i не является вершиной ветви j.
Элементы
номера строк соответствуют номерам вершин
(узлов), номера столбцов – номерам ребер (ветвей)
mij = +1, если узел i является начальной вершиной
ветви j,
0
0
0
−1 −1 0
0
0
0 −1 0 −1
0
1 −1 0 −1 1
M∑ =
0
0
1
0
0
0
1
1
Балансир. узел
Mб
mij = −1, если узел i является конечной вершиной
( )
Свойства
M
М– матрица соединений для схемы без бал.узла, Мб –
для бал. узла. Отсюда следует, что по матрице М
может быть получена строка для балансирующего
узла, а значит полная матрица соединений, т. е.
восстановлена вся схема соединений
Вторая матрица = матрица соединений ветвей в независимые
контуры, число строк которой равно числу
инциденций
независимых контуров k, а число столбцов = числу
ветвей m
M ∑ = mij , i = 1,.., n; j = 1,.., m
Пример
1×
b
Первая матрица =матрица соединений ветвей в узлах, число строк
которой = числу вершин графа, а число столбцов =
инциденций
числу ребер
Элементы
что это последний узел, тогда
d
II
c
c 3
5
d
балансирующему узлу, будем считать,
2
I
e
c
E
4
1
2
Содержание
Выделим строку, соответствующую
a
2
2
1
1
e
План
a
0
2
0
3
1
4
1
5
0
6
( )
a
b
c
d
e
1) каждая строка показывает, какие ветви
подсоединены к узлу схемы
2) каждый столбец показывает, какие узлы соединяет
эта ветвь – отсюда в каждом столбце одна 1, одна –1,
остальные 0, т. .е. сумма всех строк матрицы по
столбцам должна давать нулевую (строчную)
матрицу nt M ∑ = 0 , где nt –единичная строка.
N = nij , i = 1,.., k ; j = 1,.., m
nij = 1 , если ветвь входит в
контур
и
их
направления совпадают;
nij = −1, если ветвь входит в контур и их
направления противоположны;
nij = 0 , если ветвь не входит в контур
Пример
Свойства
1 −1 0
0
−1 0
I
N =0
0
0 −1
1
1 II
1
2
3
5
6
4
Каждая строка матрицы показывает, какие ветви
входят в контур, каждый столбец – в состав каких
контуров входит ветвь
Законы Кирхгофа 1: M I = J , где I,J – вектор-столбцы токов в ветвях
в
матричной
и задающих токов в узлах. (матрица m×n)
форме
через
матрицы
План
инциденций
Получение
обобщенного
уравнения
состояния
Содержание
2: N U в = 0 , где U в – вектор-столбец падений
напряжений в ветвях
Используя з-н Ома для сети произвольной
конфигурации, содержащей m ветвей, между
которыми отсутствует взаимноиндуктивная связь (но
можно ее и учесть, см. предыд. лекцию), а именно
U в = Z в I − E , где Z в = diag Z i , i = 1,.., m –
План
( )
диагональная матрица сопротивлений ветвей, Е –
столбец ЭДС в ветвях
Подставляя во второй з-н Кирхгофа, получаем
N Z в I − E = 0 или N Z в I = Eк , где Ек –
(
)
столбец контурных ЭДС, представляющих собой
алг. сумму ЭДС ветвей, входящих в каждый
независимый контур.
Объединяя последнее уравнение и ур-ние по 1 з-ну
Кирхгофа, получим систему уравнений состояния эл.
цепи
MI =J
⎫
⎬
N Z в I = Eк ⎭
Если матрицы М и NZв рассматривать как блоки
объединенной
матрицы
параметров
схемы
M
замещения A =
, а матрицы J и Eк как блоки
NZ в
объединенной
режима F =
состояния
Рассуждения по
формированию
обобщенного
уравнения
матрицы
исходных
параметров
J
, то получим обобщенное уравнение
Eк
AI = F
Составление матрицы МΣ для схемы любой
сложности не представляет труда. Для этого
достаточно пронумеровать все узлы и ветви схемы
замещения и в каждом столбце матрицы МΣ записать
«+1» «-1» в тех строках, которые соответствуют
Вывод
аналитической
зависимости
матриц М и N
Содержание
соединяемым данной ветвью узлам, а в остальных
элементах этого столбца записать «0». Выбор того
или иного варианта произволен и в итоге определяет
направление k-й. ветви.
Вычеркивая из полученной матрицы МΣ строку,
соответствующую выбранному балансирующему
узлу, получаем искомую матрицу М.
Составить матрицу N для сложных электрических
систем в отличие от матрицы М затруднительно,
поскольку предварительно требуется выделить
независимые контуры, количество которых k =т-n+1
может быть значительным.
Сравним
способы
формирования
уравнений
состояния электрической цепи
1) непосредственно по ее схеме и по з-нам Кирхгофа
2) в обобщенной форме с использованием матриц М
иN
По трудоемкости оба способа примерно равноценны,
Основная трудность заключается в составлении
уравнений для независимых контуров в первом
случае и матрицы N – во втором.
Очевидно, что в варианте 1) эта трудность
принципиально неустранима, тогда как в варианте 2)
ее можно избежать, если формализовать процесс
составления матрицы N. Возможность такой
формализации обусловлена тем, что матрица М
содержит в себе исчерпывающую информацию о
конфигурации схемы, в том числе и необходимую
для составления матрицы N.
Для реализации этой возможности необходимо
установить
аналитическую
зависимость,
связывающую матрицы М и N.
Обозначим столбец напряжений всех узлов схемы
(узловых напряжений) как UΣ=(Ui), i=l, ..., п.
Используем свойство матрицы МΣ, а именно то,
каждый столбец матрицы МΣ имеет положительную
единицу на месте начальной вершины и
отрицательную – на месте конечной вершины ветви.
План
Содержание
Поэтому достаточно транспонированную матрицу
соединений МΣt
умножить справа на столбец
узловых напряжений UΣ, чтобы получить столбец
разностей напряжений по концам каждой ветви, т. е.
падений напряжений на ветвях:
План
⎡U ⎤
⎡U ⎤
UВ=МΣt ⎢ ∇ ⎥ =[MtMбt]× ⎢ ∇ ⎥ =MtU∇. (2)
⎣ 0 ⎦
UВ= МΣtUΣ (1)
Пример:
⎡− 1 0 0 0 1 ⎤
⎢− 1 0 1 0 0⎥ ⎡U a ⎤ ⎡ − U a + U e ⎤
⎢
⎥ ⎢U b ⎥ ⎢ − U a + U c ⎥
⎥
⎢ 0 0 − 1 1 0⎥ ⎢ ⎥ ⎢
M ∑ tU ∑ = ⎢
⎥ ⎢U c ⎥ = ⎢− U c + U d ⎥
⎢ 0 − 1 0 0 1⎥ ⎢U ⎥ ⎢ − U + U ⎥
c
e⎥
⎢ 0 0 − 1 0 1⎥ ⎢ d ⎥ ⎢
⎢
⎥
⎢
−
+
U
U
U
⎢
⎥⎣ e ⎦ ⎣
b
c ⎥⎦
⎣ 0 − 1 1 0 0⎦
Здесь матрица узловых напряжений UΣ записана для
всех узлов схемы (включая балансирующий). При
этом узловые напряжения могут быть определены
относительно любого узла.
Узловые напряжения целесообразно определять
относительно балансирующего узла, т. е. как
падения напряжения от каждого из независимых
узлов схемы до балансирующего. Тогда можно
выделить вектор-столбец, связанный с напряжением
балансирующего узла и записатьравенство
Дерево
⎡U ∇ ⎤
⎥,
⎣ 0 ⎦
UΣ - Uбn= ⎢
где
n—единичный
столбец
(при
этом
балансирующий узел предполагается последним по
номеру, т. е. Uб=Un. Здесь матрица U∇=(Ui-Uб),
i=1,…, n-1 определяет напряжения узлов
относительно балансирующего.
Подставим в (1)
Содержание
Хорда
⎣ 0 ⎦
Подставим полученное выражения для падений
напряжений на ветвях в матричное уравнение
второго закона Кирхгофа получим, NMtU∇=0
Поскольку это условие справедливо при любой
матрице U∇, то NMt=0 (*)
Полученное
выражение
отображает
общее
топологическое свойство графа, но вместе с тем оно
не позволяет непосредственно определить матрицу
N по известной матрице М. Это связано с тем, что
одной и той же электрической цепи в общем случае
соответствует
несколько
различных
систем
независимых контуров, или, иными словами, одной
и той же матрице М можно поставить в соответствие
несколько матриц N.
Однозначность в выделении системы независимых
контуров, позволяющая получить матрицу N по
матрице М, может быть достигнута при
использовании таких понятий теории графов, как
дерево и хорды.
Деревом
называется
наименьший
связанный
подграф, содержащий все вершины графа. Такой
подграф не содержит контуров. Иными словами,
дерево – это разомкнутая часть замкнутой схемы,
которая соединяет все ее узлы. Число ветвей,
входящих в состав дерева схемы, на единицу меньше
числа узлов всей схемы (mД=n-1). Меньшим числом
ветвей нельзя соединить те же узлы.
Ветви, не вошедшие в дерево схемы, называются
хордами. Число хорд равно числу независимых
контуров схемы (mx=m- mД=m-n+1=k). Подграф,
состоящий из хорд, может содержать контуры; он
может получиться и несвязанным.
План
Примеры для той
же схемы
выбору
системы
таких
контуров,
которые
характеризуются следующими свойствами:
–каждый из контуров замыкается одной хордой, т. е.
каждая хорда входит только в один контур;
–последовательности нумерации хорд и контуров
одинаковы;
–направления обхода контуров и замыкающих их
хорд
совпадают.
Рассмотренные
контуры
называются базисными. Они являются взаимно
независимыми, так как в каждый из них входит одна
ветвь (хорда), не входящая ни в какой другой контур.
Таким образом, при выделении базисных контуров
Содержание
a
a
a
2
1
e
2
1
c e
c 3
5
5
d
c
e
d
6
4
b
c 3
6
4
b
b
b
a
a
2
1
e
c
c 3
5
d
6
b
Разделение
матриц
4
b
Одна и та же схема может быть разделена на дерево
и хорды по-разному
В результате матрица М, записанная первоначально
при произвольной нумерации ветвей, путем
перестановки столбцов преобразуется к виду
M=[MαMβ],
где
Mα–подматрица
(блок),
выражение (**) преобразуется к виду
относящаяся к дереву схемы; Mβ– подматрица,
характеризующая подграф, состоящий из хорд.
Аналогично можно разделить на блоки и матрицу N:
N=[NαNβ]
Подставив два последних выражения в выражение
(*), получим
⎡ M αt ⎤
[NαNβ]× ⎢
⎥ = NαMαt+ NβMβt=0 (2)
M
β
t
⎦
⎣
Матрица Mα, а следовательно и Mαt, является
квадратной порядка (n-1) и неособенной. Поэтому,
-1
умножая справа обе части выражения (2) на Mαt
найдем
Nα= - NβMβt Mαt-1 (**)
Доп. упрощение
Таким образом, если известны Mα, Mβ и Nβ, то
можно определить Nα, а следовательно, и всю
матрицу N. Матрицу Nβ можно задать равной
единичной матрице (Nβ=1).Это соответствует
Контурные
уравнения
Nα=- Mβt Mαt-1
Итак, разделение матрицы М на блоки,
соответствующие дереву и хордам графа, позволяет
однозначно определить матрицу N для системы
базисных контуров, отвечающих данному дереву.
Тем самым задача формирования уравнений
состояния электрической цепи произвольной
конфигурации сводится к составлению матрицы М,
разделению ее на блоки Mα и Mβ выполнению над
ними стандартных операций.
Используя разделение матрицы М на две,
соответствующие дереву и хордам, запишем 1 з-н
[M α Mβ ]× ⎡⎢IIα ⎤⎥ = J ,
Кирхгофа в виде
⎣ β⎦
(5)
где Iα, Iβ – столбцы токов в ветвях дерева и в хордах
Проведем операцию умножения Mα×Iα+ Mβ×Iβ=J
Выразим
−1
−1
Iα = Mα
J − Mα
MβIβ
(6)
Уравнение (**) представим в виде - Nαt= Mβ Mα-1 и
подставим в (6), получим
−1
Iα = Mα
J + N αt I β
(7)
Полный столбец искомых токов
−1 ⎤
⎡I α ⎤ ⎡M −1J + N αt Iβ ⎤ ⎡M α
⎡ N αt ⎤
I=⎢ ⎥=⎢ α
⎥=⎢
⎥J + ⎢
⎥ Iβ ,
Iβ
⎥⎦ ⎢⎣ 0 ⎥⎦
⎣ 1 ⎦
⎣ Iβ ⎦ ⎢⎣
используя разложение N = N α N β
и выбор
[
]
базисных контуров N β = 1 , получим N=[Nα 1],
транспонируем, тогда
⎡M −1 ⎤
I = ⎢ α ⎥J + Nt Iβ
⎣⎢ 0 ⎦⎥
(8)
Подставим (8) во 2-й з-н Кирхгофа NZВI=EК
⎛ ⎡M −1 ⎤
⎞
NZ В ⎜ ⎢ α ⎥ J + N t I β ⎟ = Е К
⎜⎢ 0 ⎥
⎟
⎦
⎝⎣
⎠
Свойства
матрицы Zк
Как понятно, токи в хордах являются контурными,
выразим слагаемое с Iβ(= IК)
⎡M −1 ⎤
NZ В N t I β = Е К − NZ В ⎢ α ⎥ J
⎣⎢ 0 ⎦⎥
или
⎡M −1 ⎤
Z К I К = Е К − NZ В ⎢ α ⎥ J ,
⎣⎢ 0 ⎦⎥
(***) где
ZК=NZВNt – матрица контурных сопротивлений (ее
свойства потом) (квадратная неособенная матрица.
Решив уравнения контурных токов (***), определим
токи в контурах, затем в ветвях, затем падения
напряжения
в
ветвях
и
напряжения
узлов
относительно балансирующего узла.
Правила
определения
элементов
матрицы
контурных
сопротивлений
В результате задача определения параметров УР
решена.
В силу диагональности матрицы сопротивлений
ветвей ZВ произвольный элемент матрицы ZК
определяется след. образом
Z ij =
m
∑ nki nkj Z k
k =1
Узловые
уравнения
Поскольку
каждый
столбец
матрицы
N
соответствует ветви, а строка – контуру, можно
сформулировать правила определения элементов
матрицы ZК через сопротивления ветвей ZВ
1) недиагональный элемент Zij равен алгебраической
сумме
сопротивлений
ветвей,
одновременно
входящих в контуры i и j. Слагаемое будет
положительным, если направления обхода контуров
по данной ветви совпадают, и отрицательным, если
не совпадают. Если контуры не имеют общих ветвей
Zij =0
2) диагональный элемент Zii равен сумме
сопротивлений ветвей, образующих i-й контур
1) диагональные элементы отличны от нуля и по
абсолютной величине превосходят недиагональные
элементы соотв. строки и столбца (см. как
образуются);
2) количество отличных от нуля недиагональных
элементов = k+2p, где k-число независимых
контуров, p- число пар контуров, имеющих общие
ветви;
3) матрица Zк симметричная , т. е. Zij = ji.
Ранее мы получили (2): UВ=MtU∇
Подставим закон Ома для ветви в матричной форме
UВ= ZВI-E в это уравнение, получим
MtU∇=ZВI-E
Решим его относительно I
I = Z −В1 (M t U ∇ + E )
Подставим полученное
Кирхгофа J=MI
выражение
в
1-й
з-н
J = MZ −В1M t U ∇ + MZ −В1E или
MZ −В1M t U ∇ = J − MZ −В1E
обозначим YУ = MZ −В1M t – матрица узловых
проводимостей. Тогда окончательно
YУ U ∇ = J − MZ −В1E
(4*)
–система узловых
уравнений
Обычно эдс в ветвях отсутствуют, тогда
YУ U ∇ = J
Формирование узловых уравнений сводится
формированию матрицы узловых проводимостей
Матрица узловых проводимостей
к
Правила
формирования
YУ = MYВ M t
(9)
является квадратной,
элементов
матрицы узловых поскольку матрица проводимостей ветвей, обратная
матрице сопротивлений ветвей – диагональная
проводимостей
Элемент матрицы определяется
Yij =
m
∑ mik m jk Yk
(10)
k =1
Вспомним, что каждый столбец матрицы М
соответствует ветви, каждая строка – узлу. В каждом
столбце два ненулевых элемента –1 и +1, поэтому в
сумме только одна пара даст ненулевое
произведение mik m jk и оно равно –1. Поэтому
1) любой недиагональный элемент матрицы Yij
проводимостей равен взятой с обратным знаком
проводимости ветви между узлами i и j. Yij = −Yl
(11)
Если узлы не соединены, элемент матрицы =0
Свойства
матрицы узловых
проводимостей
(полной, т.е. с
балансир. узлом)
1) каждый из n диагональных элементов матрицы
равен
сумме
недиагональных
элементов
соответствующей строки (или столбца), взятой с
обратным знаком, отсюда следует, что определитель
матрицы равен нулю, т. е. она является особенной;
2) в схемах замещения реальных систем
диагональные элементы матрицы
Yii =
m
∑ mik2 Yk ,
k =1
2
= 1 , если узел i является начальной или
т.е. mik
2
конечной вершиной ветви k, и mik
= 0 , если ветвь k
не связана с узлом i. Следовательно, диагональный
элемент
матрицы
определяется
суммой
проводимостей ветвей, связанных с узлом.
отличны
от нуля и, как правило, по абсолютной величине
превосходят
недиагональные
элементы
соответствующей строки или столбца;
3) количество отличных от нуля недиагональных
элементов равно удвоенному числу ветвей схемы
(2m), поэтому для матрицы порядка n, число
2
, количеств ненулевых
элементов которой равно
n
элементов равно n+2m. Анализ схем замещения
современных сложных электрических систем
показывает, что число их ветвей примерно в 1,5 раза
больше числа узлов. Если принять m=1,5n, то
количество ненулевых элементов в матрице
Y y∑
составит
числа
ненулевых
n + 2 ⋅ 1,5n = 4n ,
элементов
2
элементов равно 4n / n
n.
Таким
ростом
2) диагональные элементы матрицы из (10)
Y y∑
Y y∑
к
а отношение
общему
числу
= 4/ n
и снижается с
образом,
матрица
характеризуется слабой заполненностью, т.
е. большим числом нулевых элементов;
4)
матрица
согласно (1-34)
Y y ∑ симметрична, поскольку
Y ij = Y ji = −Y l , где l—номер
ветви, соединяющей узлы i и j.
Правила
определения
элементов
матрицы
контурных
сопротивлений
Свойства
матрицы Zк
Узловые
уравнения
В результате задача определения параметров УР
решена
В силу диагональности матрицы сопротивлений
ветвей ZВ произвольный элемент матрицы ZК
определяется след. образом
Z ij =
m
∑ nki nkj Z k
k =1
Поскольку
каждый
столбец
матрицы
N
соответствует ветви, а строка – контуру, можно
сформулировать правила определения элементов
матрицы ZК через сопротивления ветвей ZВ
1) недиагональный элемент Zij равен алгебраической
сумме
сопротивлений
ветвей,
одновременно
входящих в контуры i и j. Слагаемое будет
положительным, если направления обхода контуров
по данной ветви совпадают, и отрицательным, если
не совпадают. Если контуры не имеют общих ветвей
Zij =0
2) диагональный элемент Zii равен сумме
сопротивлений ветвей, образующих i-й контур
1) диагональные элементы отличны от нуля и по
абсолютной величине превосходят недиагональные
элементы соотв. строки и столбца (см. как
образуются);
2) количество отличных от нуля недиагональных
элементов = k+2p, где k-число независимых
контуров, p- число пар контуров, имеющих общие
ветви;
3) матрица Zк симметричная , т. е. Zij = ji.
Ранее мы получили (2): U в = M t U ∇
Подставим закон Ома для ветви в матричной форме
U в = Z в I − E в это уравнение, получим
Mt U∇ = ZвI − E
Решим его относительно I
−1
(M t U ∇ + E)
I = ZВ
Подставим полученное
Кирхгофа J=MI
выражение
в
1-й
з-н
−1
−1
J = MZ В
M t U ∇ + MZ В
E или
−1
−1
MZ В
M t U ∇ = J − MZ В
E
обозначим YУ = MZ −В1M t – матрица узловых
проводимостей. Тогда окончательно
YУ U ∇ = J − MZ −В1E
(4*)
–система узловых
уравнений
Обычно эдс в ветвях отсутствуют, тогда
YУ U ∇ = J
(5*)
Формирование узловых уравнений сводится к
формированию матрицы узловых проводимостей
Матрица узловых проводимостей
Правила
формирования
(9)
является квадратной,
YУ = MYВ M t
элементов
матрицы узловых поскольку матрица проводимостей ветвей, обратная
матрице сопротивлений ветвей – диагональная
проводимостей
Элемент матрицы определяется
Yij =
m
∑ mik m jk Yk
(10) (суммирование до m –
k =1
число ветвей)
Вспомним, что каждый столбец матрицы М
соответствует ветви, каждая строка – узлу. В каждом
столбце два ненулевых элемента –1 и +1, поэтому в
сумме только одна пара даст ненулевое
произведение mik m jk и оно равно –1. Поэтому
1) любой недиагональный элемент матрицы Yij
проводимостей равен взятой с обратным знаком
проводимости ветви между узлами i и j. Yij = −Yl
(11)
Если узлы не соединены, элемент матрицы =0
2) диагональные элементы матрицы из (10)
Yii =
∑ mik2 Yk ,
(12)
k =1
2
т.е. mik
= 1 , если узел
с ростом
i является начальной или
2
конечной вершиной ветви k, и mik
= 0 , если ветвь k
не связана с узлом i. Следовательно, диагональный
элемент
матрицы
определяется
суммой
проводимостей ветвей, связанных с узлом.
Свойства
матрицы узловых
проводимостей
(полной, т.е. с
балансир. узлом)
1) каждый из n диагональных элементов матрицы
равен
сумме
недиагональных
элементов
соответствующей строки (или столбца), взятой с
обратным знаком, отсюда следует, что определитель
матрицы равен нулю, т. е. она является особенной;
2) в схемах замещения реальных систем
диагональные элементы матрицы Y у ∑ отличны от
нуля и, как правило, по абсолютной величине
превосходят
недиагональные
элементы
соответствующей строки или столбца;
3) количество отличных от нуля недиагональных
элементов равно удвоенному числу ветвей схемы
(2m), поэтому для матрицы порядка n, число
элементов которой равно n 2 , количество ненулевых
элементов равно n+2m.
Коэфф. заполнен.
Коэффициент заполненности матрицы k з =
4
снижается
n
n
n. Таким образом, матрица Y у ∑
составит n + 2 ⋅1,5n = 4n , а k з =
m
2m + n
n2
Анализ схем замещения современных сложных
электрических систем показывает, что число их
ветвей примерно в 1,5 раза больше числа узлов. Если
принять m=1,5n, то количество ненулевых элементов
в матрице Y у ∑
4n
2
=
характеризуется слабой заполненностью, т. е.
большим числом нулевых элементов;
4) матрица
Yу ∑
симметрична, поскольку
Yij = Y ji = −Yl , где l—номер ветви, соединяющей
узлы i и j.
Почему дальше По практике расчетов в обобщенной форме – много
изучаем
метод уравнений, сложнее, контурные уравнения – их
узл. напряжений
количество k=m-n+1, узловых напряжений k=n-1.
Методом контурных уравнений их кол-во меньше,
но зато формирование их более сложно для цепей с
большим кол-вом элементов. Поэтому в расчетах
электрических сетей в УР чаще всего используются
узловые уравнения или метод узловых напряжений.
Поэтому рассмотрим подробно именно этот метод.
(МКТ - аналогичен, техника решений та же)
Постановка
Мы получили уравнение (5*) YУ U ∇ = J
задачи
В этом уравнении используются фазные значения
напряжений и токов. В расчетах УР эл. сетей обычно
используют линейные напряжения и токи, тогда
наше уравнение примет вид
YУ U ∇ = 3J
(6*)
Чтобы получить эту систему уравнений для
конкретной схемы, нам должно быть дано:
1) значения всех проводимостей ветвей, или
сопротивлений;
2) токи всех источников тока и токи нагрузки
потребителей во свех узлах, кроме
балансирующего
3) напряжение балансирующего узла
Напоминание: для удобства вычислительных
процедур базисный по напряжению и и
балансирующий по мощности берется один и тот же
узел
Определить: напряжения в узлах и токи в ветвях
Случай U б = 0
Если в схеме замещения присутствуют поперечные
ветви, т.е. есть связи с нейтралью, то в качестве
балансирующего удобно взять нейтраль. Тогда
уравнение (6*) примет вид
YУ U = 3J
⎧⎪G у U'+B у U" = 3I';
⎨
⎪⎩− B у U'+G у U" = 3I"
или в матричном виде
Gу
−Bу
Случай U б ≠ 0
(13)
Напоминание: смысл величин, как считаются
(формула 11) (12)
Поскольку сначала считаются проводимости между
узлами по (11), то для (12) удобнее представить
Yii =
m
k =1
Подставим в (13)
(15)
(G у − jB у )⋅ (U'+ jU") =
3 (I'+ jI")
Распишем отдельно дейтсв. и мнимые части
(17)
Аналогично тому, как мы разделили действ. и
мнимые части для случая нулевого напряжения в
балансирующем узле, проведя же преобразования,
получим
j =1
j≠k
⎧Yу = G у − jB у
⎪
⎨U = U'+ jU"
⎪J = J'+ jJ"
⎩
Если схема не содержит поперечных ветвей, то в
качестве
балансирующего
берут
один
из
генераторных узлов (обычно соответствующий
мощной электростанции, ведущей по частоте),
YУ U = 3J − YбU б
(14)
Определение вектора задающих токов: для каждого
узла задающий ток равен алг. сумме токов
источников (нагрузки), подключенных к узлу. Токи
потребления и генерации, естественно, должны
иметь разные знаки.
узел генерир.
| нагрузочный
Сост.: | акт. | реакт. | акт. | реактивная |
+
–
– инд.+| емк.–
В (13) величины комплексные, разделим мнимые и
действ. части
(16)
напряжение которого задано Uб.
Уравнение (6*) может быть представлено в виде
n +1
∑ Ylk = − ∑ Ykj
B у U'
I'
⋅
= 3
G у U"
I"
Gу
−Bу
B у U'
g U
I'
⋅
= 3 − б б
G у U"
I" − b бU б
(18)
Получили систему 2n уравнений. СЛАУ! Далее –
решить.
Методы решения СЛАУ
Классификац
ия методов
Метод
Гаусса=метод
последовател
ьного
исключения
– точные (Гаусса, схема Жордана)
– итерационные (простой итерации, Зейделя)
Общее описание методов
Самый распространенный метод, есть несколько
реализующих
метод
алгоритмов.
Самый
распространенный алгоритм единственного деления (или
алгоритм с обратным ходом)
Имеем систему уравнений (16) или (18), т.е. если
расписать, имеем
(19)
⎧ g11U '1 + g12U ' 2 +... + g1nU ' n +b11U "1 +b12U "2 +... + b1nU "n = J 1 '
⎪
⎪ g 21U '1 + g 22U ' 2 +... + g 2 nU ' n +b21U "1 +b22U "2 +... + b2nU "n = J 2 '
⎪.....
⎪
⎨ g n1U '1 + g n 2U ' 2 +... + g nnU ' n +bn1U "1 +bn12U "2 +... + bnnU "n = J n '
⎪− b U ' −b U ' −... − b U ' + g U " + g U " +... + g U ' = J "
1n n
11 1
12
2
1n "n
1
⎪ 11 1 12 2
⎪....
⎪
⎩− bn1U '1 −bn 2U ' 2 −... − bnnU ' n + g n1U "1 + g n 2U "2 +... + g nnU '"n = J "n
Формализовать задачу, т.е. коэффициенты и неизвестные
записать в общем виде
⎧a11U 1 + a12U 2 + ... + a1nU n = c1
⎪
⎪a 21U 1 + a 22U 2 + ... + a 2nU n = c 2
⎨
⎪....
⎪⎩a n1U 1 + a n 2U 2 + ... + a nnU n = c n
(20)
Глобально алгоритм разделяется на 2 этапа: прямой ход и
обратный. Задача прямого хода – свести систему
уравнений к треугольной типа
⎧U1 + b12U 2 + ... + b1nU n = b1
⎪
b22U 2 + ... + b2 nU n = b2
⎪
⎨
⎪....
⎪⎩
bnnU n = bn
(21)
Обратный ход – нахождение решения подстановкой
решений снизу
Общее количество действий ≈ n 3 – много!
Последовател Прямой ход
ьность
Действие 1. преобразовать матрицу n×n таким образом,
действий при чтобы диагональные элементы были доминирующими,
выполнении
т.е. по абсолютной величине наибольшими в строке. При
алгоритма
этом столбик переменных перемещается полностью
единственног Пример: -2u1+3u2-6u3+u4=-6
-6u3-2u1+3u2+u4=-6
о деления
5u1- u2+3u3
=5
3u3+5u1 –u2
=5
u1+7u2
-2u4=1
u1+7u2-2u4=1
-u1-2u2+3u3-4u4=-8
3u3 -u1 -2u2 -4u4=-8
Действие 2. Прямой ход.
Шаг 1. Исключаем из всех уравнений, начиная со
второго, первый член, для чего
а) разделить все коэффициенты и свободный член на
коэффициент при первом уравнении (на –6);
б) получившееся в результате шага 1а уравнение
умножить на коэффициент перед первым членом i-того
уравнения с обратным знаком и сложить эти два
уравнения. В результате действий первый член в i-том
уравнении обратится в 0. (2: 1а×-3, сложить 1а и рез-т)
Шаг 2. Исключить из всех уравнений, начиная с 3-го 2-й
член, для чего
а) уравнение 1а переписать без изменений
б) для укороченной на 1-й член системы проделать
операции шага 1
Шаг 3 и далее. Повторять операции шага 2, пока не
придем к треугольной системе уравнений.
Действие 3. Обратный ход.
=алгоритм без обратного хода:
Схема
Жордана
действие1, шаг 1 те же. Начиная с шага 2 проводятся
дополнительные операции с уравнениями от1 до i-1, в
которых проводятся преобразования таким образом,
чтобы
коэффициент
столбца,
соответствующий
преобразуемому уравнению обратился в 0. Операций еще
больше, поэтому редко применяется.
Достоинства
Достоинства: простота, наглядность
и недостатки Недостатки: возможна большая погрешность, вызванная
метода
1) округлением результатов расчетов (диагональный
Гаусса
элемент близок к нулю – избегаем, но на следующих
(Жордана)
шагах возможно)
2) неточностью задания исходных данных. Всегда
присутствует погрешность в задании параметров
системы. Как правило, погрешность полученных
решений бывает соизмерима с погрешностью задания
параметров системы, т.е. коэффициентов матрицы.
Однако могут быть случаи, когда погрешность исх.
данных дает очень большую погрешность решения.
плохая
обусловленность
матрицы
Причина
–
коэффициентов, признаком кторой является малость
определителя матрицы относительно оценки Адамара
Δ<
n
n
∏∑ aij
⎧U (i +1) = 0 + b U (i ) + ... + b U (i )+b
1n n 1
12 2
⎪ 1
⎪ (i +1)
= b21U (i ) + 0 + ... + b2nU (i ) + b2
⎪U 2
1
n
⎨
⎪....
⎪ (i +1)
= bn1U (i ) + bn 2U (i ) + ... + 0 + bn
⎪U
1
2
⎩ n
2
i =1 j =1
Метод
простой
итерации
Алгоритм
метода ПрИт
Почему? Некорректная постановка задачи, либо
специфичность рассматриваемой системы, например, при
расчете системы в УР на границе устойчивости.
Как избежать? В первом случае корректно поставить
задачу, во втором – решать ее другими методами
Гораздо меньше операций на шаге итерации, но шагов
гораздо больше, чем n. Были ограничения к применению
итерационных методов, когда был мал объем
оперативной памяти ЭВМ, но не сейчас.
Суть метода: задать любые исходные цифры, считая их
решением. Далее, подставив в уравнения, получить
уточненное решение. Полученные уточненные решения
снова подставить в уравнения для получения нового
уточнения до тех пор, пока не будет достигнута заданная
точность
1. представить каждое k-е уравнение в виде решения
относительно Uk, т.е. из (20)
⎧U1 = 0 + b12U 2 + ... + b1nU n + b1
⎪
⎪U 2 = b21U1 + 0 + ... + b2nU n + b2
, (22)
⎨
⎪....
⎪⎩U n = bn1U1 + bn 2U 2 + ... + 0 + bn
4. Процесс 3) закончить, если разность между соседними
приближениями всех величин достигнет заданной
(i +1)
точности U k
Общий
записи
вид
k −1
∑ bkjU (ji) +
j =1
n
∑
j = k +1
(23)
bkjU (ji ) + bk =
n
∑ bkjU (ji) + bk
j =1
j ≠k
(24)
Матричная
форма записи
Метод
Зейделя
U (i +1) = BU (i ) + b
(25)
Суть: применить для расчета уже полученные на k-м
шаге решения
U k(i +1) =
k −1
∑ bkjU (ji +1) +
j =1
или
U
где bkj = akj akk , bk = J k akk .
Диагональные члены =0
( 0)
U k(i +1) =
− U k(i ) ≤ ε
(i +1)
n
= BвU
(26)
j = k +1
в
(i +1)
bkjU (ji ) + bk
∑
матричной
+ BнU
(i )
+b
форме
(27)
( 0)
2. Задать начальные приближения U1 , U 2 ,…, U n(0)
3. Подставив начальные приближения в правую часть
уравнений (22), получим первое приближение. Таким же
образом результат может быть использован для
получения 2-го, 3-го и т.д. (i+1)-го приближения
Вопросы
сходимости
итерационны
х процессов
Для выполнения условия (23) при любой точности
необходимо, чтобы
(i )
*
lim xk = xk ,
i →∞
(28)
где xi* – точные решения системы уравнений.
При выполнении условия (28) при любых начальных
приближениях итерационный процесс называется
сходящимся, иначе – расходящийся.
Выясним условия сходимости итерационного процесса.
Для метода ПрИт из (25), записав решение на (i+1)-м и
i-м шаге, а затем вычтя решения, получим в матричной
форме
(
x (i +1) − x (i ) = C x (i ) − x (i −1)
Элементы матрицы С применительно к методу узловых
напряжений определяются элементами матрицы узловых
напряжений и зависят только от ее свойств.
А из этих свойств диагональный элемент не равен 0, т.е.
преобразование к виду (22) всегда выполнимо.
Кроме того, как правило, диагональные элементы
)
(29)
Поскольку это выражение справедливо для любых i, то
выражение (29) можно записать
(
x (i +1) − x (i ) = Ci x (1) − x (0)
превышают недиагональные (св-ва матрицы узл.
)
проводимостей), но поскольку в схемах замещения
(30)
Условие сходимости (28) можно преобразовать к виду
(
lim x
i →∞
(i +1)
−x
(i )
)= 0
Тогда условие сходимости примет вид
имеются ветви с индуктивными и емкостными
проводимостями, то условие (32) часто не выполняется.
i
lim С = 0
i →∞
Однако, условие (32) –достаточное, поэтому его
невыполнение не означает, что итер. процесс не сходится
, в действительности итер. процесс по методу простой
итерации обычно сходится, хотя и очень медленно.
(31)
Для выполнения условия (31) необходимо и достаточно,
чтобы собственные значения матрицы С были меньше 1.
λ k < 1,
k = 1,2,.., n
Из курса ВМ вы знаете, что собственными значениями
матрицы называются корни характеристического
уравнения det(C − λ1) = 0
или (записать в развернутом виде)
Вычисление собственных значений характеристического
уравнения более сложная процедура, нежели решение
системы
уравнений
методом
Гаусса,
поэтому
необходимыми и достаточными условиями на практике
не пользуются. Применяются достаточные условия
сходимости, которые формулируются непосредственно
через элементы матрицы С:
n
∑ сij < 1
Как
обеспечить
сходимость
итерац.
процесса?
при i=1,2,..,n
j =1
или
или
n
∑ сij < 1
i =1
n
∑ сij < aii
j =1
i≠ j
при j=1,2,..,n
при i=1,2,..,n
(32)
По методу Зейделя необходимые и достаточные условия
будут отличаться от необходимых и достаточных
условий по методу простой итерации, поскольку иначе
формируется матрица С, состоит из 2-х частей. Поэтому
в общем случае могут быть системы уравнений, которые
сходятся по методу Зейделя, и не сходятся по методу
ПрИт.
Но опять мы не будем пользоваться необх. и дост.
условиями из-за их сложности.
Достаточные условия сходимости метода Зейделя
совпадают с достаточными условиями сходимости
метода ПрИт, но скорость сходимости процесса по
методу Зейделя больше, т.е. сходится быстрее.
Итак, как по методу Зейделя, так и по методу ПрИт мы
не всегда можем получить решение, поскольку процесс
может расходиться.
Но даже простое переставление уравнений в исходной
системе может изменить условия сходимости. Поэтом
возникает вопрос, нельзя ли преобразовать исходную
систему уравнений таким образом, чтобы процесс
обязательно сходился?
При положительно-определенной матрице итерац.
процесс по методу Зейделя сходится всегда.
Чтобы привести исходную матрицу к положительноопределенной, надо исходную систему уравнений
умножить слева на транспонированную матрицу
коэффициентов, т.е. если имеем систему
Ах=b, то умножив на At, имеем AtAx=Atb – или
A'x=b',
матрица A' – положительно определенная,
итерационный процесс по методу Зейделя обязан
сходиться. (медленно!, вырастает объем вычислений)
Вопросы
сходимости
итерационны
х процессов
чтобы собственные значения матрицы В были меньше 1.
λ k < 1,
Из курса ВМ вы знаете, что собственными значениями
матрицы называются корни характеристического
уравнения det(B − λ1) = 0
или
в
развернутом
виде
(b11 − λ )
(i )
*
lim U k = U k ,
(28)
i →∞
*
где U i – точные решения системы уравнений.
При выполнении условия (28) при любых начальных
приближениях итерационный процесс называется
сходящимся, иначе – расходящийся.
Выясним условия сходимости итерационного процесса.
Для метода ПрИт из (25), записав решение на (i+1)-м и
i-м шаге, а затем вычтя решения, получим в матричной
форме
(
U (i +1) − U (i ) = B U (i ) − U (i −1)
)
(29)
Поскольку это выражение справедливо для любых i, то
выражение (29) можно записать
(
U (i +1) − U (i ) = B i U (1) − U (0)
)
(30)
Условие сходимости (28) можно записать в виде
)
(
(i +1)
− U (i ) = 0
lim U
i →∞
Тогда условие сходимости (30) примет вид
i
lim В = 0 ,
i →∞
(31)
потому что на первом шаге итерации, как правило, нуль
не получается
Для выполнения условия (31) необходимо и достаточно,
b12
...
b1n
...
b2n
b21
(b22 − λ )
...
...
...
bn1
bn 2
...
Для выполнения условия (23) при любой точности
необходимо, чтобы
k = 1,2,.., n
=0
(bnn − λ )
Вычисление собственных значений характеристического
уравнения более сложная процедура, нежели решение
системы
уравнений
методом
Гаусса,
поэтому
необходимыми и достаточными условиями на практике
не пользуются. Применяются достаточные условия
сходимости, которые формулируются непосредственно
через элементы матрицы В:
n
∑ bij < 1
при i=1,2,..,n
j =1
или
или
n
∑ bij < 1
i =1
n
∑ bij < bii
при j=1,2,..,n
при i=1,2,..,n
(32)
j =1
i≠ j
Элементы матрицы B применительно к методу узловых
напряжений определяются элементами матрицы узловых
напряжений и зависят только от ее свойств.
А из этих свойств диагональный элемент не равен 0, т.е.
преобразование к виду (22) всегда выполнимо.
Кроме того, как правило, диагональные элементы
превышают недиагональные (см. свойства матрицы
узловых проводимостей), но поскольку в схемах
замещения имеются ветви с индуктивными и
емкостными проводимостями, то поскольку емкостная
проводимость может быть отрицательной, условие (32)
часто не выполняется.
Как
обеспечить
сходимость
итерац.
процесса?
Однако, условие (32) –достаточное, поэтому его
невыполнение не означает, что итерационный процесс не
сходится , в действительности итерационный процесс по
методу простой итерации обычно сходится, хотя и очень
медленно.
Для исследования сходимости по методу Зейделя
представим итерационный процесс в виде
U (i ) = B н U (i ) + B в U (i −1) + b , (33)
где Вн и Вв – верхняя и нижняя треугольные матрицы.
Выражение (33) можно преобразовать
U (i ) (1 − B н ) = B в U (i −1) + b;
U (i ) = (1 − B н )−1 B в U (i −1) + (1 − B н )−1 b;
(34)
или U (i ) = B' U (i −1) + b'
Выражение (34) аналогично выражению (25) для метода
простой итерации, т.е. для сходимости по методу Зейделя
необходимые и достаточные условия формируются
аналогично условиям по методу простой итерации через
определение собственных значений матрицы. Поскольку
сами матрицы отличаются, то будут отличаться и
условия сходимости. И в общем случае могут быть
системы уравнений, которые сходятся по методу
Зейделя, и не сходятся по методу ПрИт.
Но опять мы не будем пользоваться необходимыми и
достаточными условиями из-за их сложности.
Достаточные условия сходимости метода Зейделя
совпадают с достаточными условиями сходимости
метода
ПрИт,
поскольку
матрица
узловых
проводимостей формируется так же и обладает теми же
свойствами, но скорость сходимости процесса по методу
Зейделя больше, т.е. сходится быстрее.
Математичес
кий аппарат
Microsoft
MathCAD
Итак, как по методу Зейделя, так и по методу ПрИт мы
не всегда можем получить решение, поскольку процесс
может расходиться.
Но даже простое переставление уравнений в исходной
системе может изменить условия сходимости. Поэтому
возникает вопрос, нельзя ли преобразовать исходную
систему уравнений таким образом, чтобы процесс
обязательно сходился?
При положительно-определенной матрице итерац.
процесс по методу Зейделя сходится всегда.
Чтобы привести исходную матрицу к положительноопределенной, надо исходную систему уравнений
умножить слева на транспонированную матрицу
коэффициентов, т.е. если имеем систему
Ах=b, то умножив на At, имеем AtAx=Atb – или
A'x=b',
матрица A' – положительно определенная,
итерационный процесс по методу Зейделя обязан
сходиться. (медленно!, вырастает объем вычислений)/
(Замечания к выполнению курсового.)
Чтобы понять вычислительные процессы, надо их
прорешать вручную, составить программу, "пощупать".
А для практического решения реальных задач, в которых
число уравнений порядка сотен, надо использовать
современные средства.
Mapple, MathLAB, MathCAD.
MathCAD под Windows.
– работа с файлами;
–
возможности
внесения
пояснительного текста;
и
форматирования
– на панели инструментов дополнительные клавиши:
Insert Function — вставка функции, Insert Utit –
вставить единицы измерения, Calculate - пересчитать;
– дополнительно математическая панель, в ней:
арифметическая панель, панель логических операций
и операций сравнения, графики, матрицы, элементы
матанализа
(интегралы,
производные),
программирования (внутренний язык Си++)
– последовательность операций.
панель