Рукавицын А.Н. , Жмарева А.В.
реклама

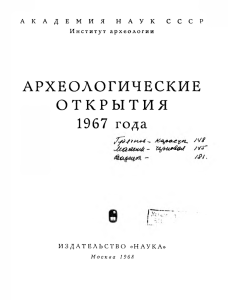
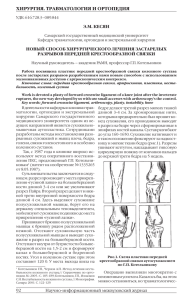
Рукавицын А.Н. 1, Жмарева А.В. 2 Доцент, кандидат технических наук, 2cтудент,Юго-Западный государственный университет ИССЛЕДОВАНИЕ ДИНАМИКИ МЕХАТРОННОГО УСТРОЙСТВА ДЛЯ РЕАБИЛИТАЦИИ КОЛЕННОГО СУСТАВА Аннотация В статье представлены результаты исследования динамических параметров механотерапевтического устройства, для реабилитации коленного сустава нижних конечностей человека, разрабатываемого на основе мехатронных биоинженерных технологий. Ключевые слова: механотерапия, коленный сустав, динамика, мехатронная система Rukavitsyn A.N. 1, Zhmareva A.V. 2 1 Associate Professor, Candidate of technical sciences, 2Student, South-Western State University DYNAMICS RESEARCH MECHATRONIC UNIT FOR REHABILITATION OF THE KNEE Abstract The paper presents the results of a study of dynamic parameters therapeutic device for the rehabilitation of the knee joint of the lower extremities of a person, on the basis of the developed mechatronic bioengineering. Keywords: mechanic therapeutic, knee joint, dynamics, mechatronic system В современном мире нас повсюду окружают новейшие достижения техники. Невозможно представить ни одну из сфер деятельности человека без использования мехатронных систем (МС). Одной из таких сфер является медицина, в частности, реабилитационная. Поскольку современная медицина думает не только о спасении жизни пациента, но и о том, каково будет её качество после окончания обязательных процедур, то в последние годы большое развитие получили реабилитационные МС, предназначение которых – не только облегчить труд врача-физиотерапевта, но и существенно расширить его возможности, позволяя имитировать естественные движения человека, подбирать индивидуальные программы для каждого пациента, осуществлять непрерывный контроль за его состоянием во время процедур [1]. Примером таких разработок служат устройства для реабилитации нижних конечностей человека (см. рис.1). 1 Рис. 1 - Устройство L4 для СРМ – терапии нижних конечностей Данное устройство предназначено для лечения и реабилитации больных с травмами и заболеваниями в области тазобедренного и коленного суставов. Может применяться при лечении последствий ДЦП, восстановлении двигательной активности после инсультов, постоперационный период, повреждении периферических нервов, сосудистых заболеваниях. Несмотря на очевидные достоинства подобных устройств, им присущи следующие недостатки. Во-первых, большинство конструкций позволяют реализовать только один вид движения – сгибание (разгибание) сустава; во-вторых, необходимо создавать принципиально новые способы управления, позволяющие не только производить запрограммированные движения, но и адаптироваться к изменяющимся условиям для получения наилучшего результата [2]. Коленный сустав (см. рис.2) - это шарнирный тип синовиального сустава. Его важнейшая его функция - это сгибание и разгибание, при этом коленный сустав допускает и небольшие повороты в стороны. Движение в коленном суставе происходит между синовиальными соединениями нескольких костей, которые включают коленную чашечку, бедренную и большеберцовую кости. При сгибании и разгибании сустава движение осуществляется между головками бедренной кости и уплощенной верхней частью большеберцовой кости. 72 1 — бедренная кость 2 — межмыщелковая яма бедренной кости; 3 — латеральный мыщелок большеберцовой кости; 4 — медиальный мыщелок большеберцовой кости; 5 — головка малоберцовой кости; б — большеберцовая кость 7 — бугристость большеберцовой кости; 8 — медиальный мыщелок большеберцовой кости; 9 — латеральный мыщелок большеберцовой кости; 10 — надколенник. Рис.2 - Коленный сустав, правый (рентгеновский снимок). В случае передачи вращательного движения мышц, кости которых вращаются в шаровой опере - в коленном суставе, основную роль играют всевозможные связки, которые ограничивают перемещение соответствующих костей. При воздействии импульса от мозга, мышца сокращается и распрямляясь, она отдаёт энергию упругой деформации, вследствие чего передаётся момент силы с опорой на колено. Реактивная сила (сила противоположна направлению действия момента силы и равная ей по величине) действует в коленном сочленении. Коленный сустав функционирует как механизм сгибания – разгибания [3]. При разработке подобных устройств необходимо определить кинематические соотношения, описывающие движения нижней конечности человека, для чего воспользуемся расчетной схемой, представленной на рис.3. Рис. 3 - Расчетная схема реабилитационного устройства для нижней конечности человека: 1 - бедренная кость (звено О1А1); 2 - большеберцовая кость (звено А1В1). Уравнения координат точек А1 и В1, определяющих положение коленного и голеностопного суставов соответственно, имеют вид: , . Для составления уравнений, описывающего динамику реабилитационного устройства для коленного сустава, применим уравнения Лагранжа II рода: 73 Кинетическая энергия звена О1А1, совершающего вращательное движение относительно неподвижной точки: где - обобщенная скорость. Поскольку в начальный период времени система находится в состоянии покоя, то а Обобщенная сила может быть определена из выражения работы сил на элементарных перемещениях системы . , где M – управляющий момент привода коленного модуля, приложенный к звену О1А1, - Мс – момент сопротивления, силы тяжести звеньев О1А1 и А1В1 соответственно. Уравнение для обобщенной скорости имеет вид: Для определения момента воспользуемся уравнением Хилла, которое позволяет выявить зависимость скорости укорочения мышцы от величины развиваемой силы [4]. В общем случае уравнение имеет вид: откуда определим оптимальную величину управляющей силы: 0.65P0b=(0.35P0+a)V , где Р0 - максимальное значение силы, - a и b - эмпирически вычисленные константы. На основе представленных выражений с помощью пакета блочного моделирования Matсad получены графики (см. рис. 4,5) скоростей и ускорений при наличии и отсутствии момента сопротивления. а) б) Рис.4 - Зависимости скорости (а) и ускорения (б) от времени при Мс=0 74 а) б) Рис.5 – Зависимости скорости (а) и ускорения (б) от времени при Мс Исходя из анализа полученных результатов, необходимо отметить, о необходимости учета естественных движения в коленном суставе человека при совместном движения с механотерапевтическим реабилитационным устройством. Указанное взаимовлияние должно происходить механические устройства, общую нагрузку, через общий источник энергии, а также вследствие естественных и искусственных динамических связей между каналами в блоке управления. Разработка уточненной математической модели рассматриваемой МС позволит провести анализ поведения исполнительного звена, с целью получения необходимых данных определяющих рабочую область движения исполнительного органа, а также форму траекторий, которую должна обеспечивать система реабилитации для реализации естественных движений нижних конечностей человека. Работа выполнена в рамках реализации Федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 годы. Литература 1. Яцун, С.Ф. Медицинская робототехника [Текст]:/С.Ф. Яцун, А.Н. Рукавицын, А.Ю. Чижов//DNY VĚDY – 2013: Materiály IX mezinárodní vědecko - praktická konference /Praha (Чехия), Publishing House «Education and Science», 2013, с.64-67 2. Яцун, С.Ф. К вопросу создания биоинженерного мехатронного модуля для экзоскелета человека [Текст]:/С.Ф. Яцун, А.Н. Рукавицын// БЪДЕЩИТЕ ИЗСЛЕДВАНИЯ - 2013: Материали за IX международна научна практична конференция, Т. 23 Биологии/ София (Болгария), изд-во «Бял ГРАД-БГ» ООД, 2013, с.88-94 3. Яцун, С.Ф. Определение параметров приводов биоинженерных мехатронных модулей для экзоскелета нижних конечностей человека [Текст]:/С.Ф. Яцун, А.Н. Рукавицын//Известия ЮЗГУ, Серия: Техника и технологии, Ч.1 - №2. - Курск, 2012, с.196-200 4. Яцун, С.Ф. Кинематический анализ движения руки в локтевом суставе при реабилитации методами механотерапии [Текст]: / С.Ф. Яцун, Е.С. Тарасова// Известия Самарского научного центра Российской академии наук, т.13, №4(4), 2011, с.12151220 Русинова Н.В.1, Егорова И.Е.2 Кандидат технических наук; магистрант Поволжский государственный технологический университет ОТБОР В РУБКУ ДЕРЕВЬЕВ ВНУТРИ БИОГРУППЫ 1 2 Аннотация С целью создания условий, способствующих благоприятному росту лучшего дерева в биогруппе, предлагается вырубать конкурирующие деревья, занимающие наибольшие площади произрастания по сравнению с площадью роста центрального дерева. Ключевые слова: рубки ухода, отбор деревьев в рубку, площадь произрастания, биогруппа. Rusinova N.V.1, Egorova I.E.2 1 Candidate of Technical Sciences; 2master student Volga State University of Technologi SELECTION IN THE CUTTING OF THE TREES INSIDE BIOGROUP Abstract In order to create the conditions which contribute the favorable growth in Biogroup better wood, it is proposed to cut down the competing trees, occupying the largest area of growth compared to the growth of the central area of the tree. Ключевые слова: the lumbering, the selection of trees for cutting, the area of growth, the Biogroup. Хозяйственная деятельность (в частности, рубки ухода) направлена на повышение биологической продуктивности лесных экосистем без изменения их типа. Небрежное проведение рубок повышает фаутность, захламленность и пожароопасность древостоя, а также способствует смене одних пород другими. Для предотвращения нежелательных последствий рубок необходимо подбирать параметры (отбор деревьев, интенсивность изреживания) и технологию в соответствии с характеристиками древостоя. Отбор деревьев целесообразно начинать с отбора лучших деревьев, а затем по отношению к ним вспомогательных (полезных) и мешающих [4]. С целью определения деревьев максимальной продуктивности отбор производят по классификации, учитывающей три показателя: качество кроны, ствола, характер роста. Количество оставляемых для дальнейшего роста деревьев определяется отношением диаметра дерева к его высоте в интервале 0,8....1,1 [2]. Визуальный отбор вспомогательных и мешающих деревьев в большинстве случаев ошибочен. Вместо мешающих вырубают полезные деревья, что влияет на рост, в частности по диаметру, лучшего дерева. 75