Синтез и некоторые результаты исследований проекционных
реклама

152
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
УДК 62.505
СИНТЕЗ И НЕКОТОРЫЕ РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ ПРОЕКЦИОННЫХ
РЕКУРРЕНТНЫХ АЛГОРИТМОВ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЛИНЕЙНЫХ
МОДЕЛЕЙ СТАТИЧЕСКИХ ОБЪЕКТОВ
А.Е. Карелин, А.А. Светлаков
В статье синтезируются алгоритмы подстройки математических моделей управляемых объектов по мере поступления в систему измеренных значений их входных и выходных переменных, а также приводятся некоторые результаты их исследований.
Введение
Одно из основных направлений развития современной теории адаптивного управления
различного рода производственными и технологическими объектами – создание и исследование класса адаптивных систем управления с подстраиваемыми математическими моделями
управляемых объектов [1, 2]. Важнейшими элементами систем данного класса, определяющими эффективность процесса их адаптации, являются алгоритмы подстройки (идентификации)
математических моделей управляемых объектов по мере поступления в систему измеренных
значений их входных и выходных переменных. Несмотря на то что в настоящее время имеется
значительное число упомянутых выше алгоритмов, базирующихся на различных идеях и подходах [3, 4], задача повышения эффективности уже имеющихся и создания и исследования новых алгоритмов подобного назначения остается актуальной и привлекает к себе внимание специалистов, занимающихся решением проблем адаптивного управления.
В данной работе синтезируется ряд алгоритмов подстройки математических моделей
управляемых объектов отмеченного выше класса, а также приводятся некоторые результаты их
исследований. Каждый из этих алгоритмов является той или иной модификацией хорошо известного одноточечного оптимального рекуррентного алгоритма подстройки математических
моделей линейных статических объектов управления, основанного на использовании проекционного алгоритма Качмажа решения систем линейных алгебраических уравнений [3, 4]. Интерес
к совершенствованию именно этого алгоритма обуславливается рядом достоинств: 1) он достаточно прост в вычислительном отношении; 2) требует небольшой оперативной памяти при его
реализации с помощью ЭВМ; 3) является малоинерционным и соответственно позволяет отслеживать изменения переменных параметров объекта; 4) является рекуррентным, т.е. позволяет вести вычисления в реальном масштабе времени по мере поступления результатов наблюдений, что весьма существенно при управлении нестационарными объектами; 5) позволяет
достаточно точно определять параметры объекта при произвольных начальных оценках данных параметров; 6) последовательность оценок параметров, вычисляемых с его помощью, является монотонно по евклидовой норме сходящейся к истинным значениям параметров; 7)
имеется целый ряд возможностей повышения его помехоустойчивости и эти возможности аппаратно и программно легко реализуются. Перечисленные достоинства определили широкое
практическое применение данного алгоритма при автоматизации промышленных объектов. Однако в случае, когда значения измеряемых величин, действующих на вход объекта, в соседние
153
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
моменты времени мало отличаются друг от друга, обсуждаемый алгоритм обладает весьма
низкой скоростью сходимости оценок параметров объекта, что чрезмерно увеличивает период
получения достаточно точных оценок параметров и соответственно снижает эффективность
управления объектом. Желание устранить данный недостаток, по возможности сохраняя при
этом все его отмеченные выше достоинства алгоритма, и тем самым существенно расширить
возможности его применения в разработках адаптивных систем управления различными процессами стимулировало нас синтезировать ряд его модифицированных вариантов, сущность и
результаты исследований которых обсуждаются в последующих разделах данной работы.
1 Постановка задачи идентификации и описание оптимального
одношагового алгоритма
Как известно [4], идентификацией объекта его математической моделью, или просто
идентификацией, обычно называют процесс построения математической модели объекта с целью оценки его статических и динамических характеристик с использованием измеренных значений, реально действующих на его входах воздействий и его реакций на эти воздействия. В
достаточно общем для практических приложений виде задача построения математической модели управляемого объекта может быть сформулирована следующим образом.
Пусть в результате измерений действующих на входы объекта компонентов вектора
x = {x1 , x 2 ,..., x n } и реакции y на данные воздействия получены численные значения
xt = {xt1 , xt 2 ,..., xtn } , t = 1, m , где m – некоторое ограниченное натуральное число. Требуется
определить вид оператора
F , который был бы в определенном смысле близок к оператору
объекта F0 , в соответствии с которым осуществляется преобразование входных воздействий
xtj , j = 1, n , в значения yt его реакции y , t = 1, m . Другими словами, необходимо определить
такой оператор F , который бы удовлетворял соотношению F ~ F0 ,где символом «~» обозначено отношение близости в том или ином смысле левой и правой частей соотношения.
В наиболее общем случае задача идентификации объекта включает в себя задачу определения структуры объекта идентификации и задачу идентификации параметров объекта. Первая из этих задач возникает в случае, когда вид оператора F0 является неизвестным и требует
определения. Со второй из названных задач приходится иметь дело тогда, когда структура оператора F0 предполагается известной и соответственно требуется идентифицировать только
его параметры. Всюду ниже речь будет идти прежде всего о второй из этих задач, т.е. о задаче
параметрической идентификации, которая сводится к отысканию таких оценок параметров математической модели
F , которые обеспечивают наилучшую в каком-либо смысле близость
расчетных и измеренных значений реакции объекта на одни и те же входные воздействия. Под
расчетными значениями реакции объекта здесь понимаются значения его выхода, рассчитанные в соответствии с имеющейся математической моделью. При этом будем считать, что оператор F0 является линейным и статическим. Это означает, что зависимость значений выхода
154
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
объекта от значений его входов описывается следующим уравнением: yt =
n
∑x α
tj
j =1
j
, где y t –
значение выхода объекта в момент времени t ; xtj − значение j -го входа x j в этот же момент
времени, j = 1, n ;
α j − неизвестные параметры объекта; n – число входов объекта – некото-
рое ограниченное натуральное число; t – дискретные моменты времени.
В соответствии со сделанным выше предположением относительно структуры оператора
F0 будем искать модель объекта (оператор F ) в следующем виде:
n
yˆ t = ∑ xtj atj ,
(1)
j =1
где
yˆ t − оценка значения выхода объекта в момент времени t , полученная с использованием
данной модели;
atj − оценка j -го параметра объекта для t -го такта оценивания.
Заметим, что в более компактной и удобной для наших дальнейших целей векторной
форме записи формула (1) имеет вид yˆ t
умножения векторов xt
= ( x t , a t ) , где («,») – символ операции скалярного
= {xt1 , xt 2 ,..., xtn } и at = {at1 , at 2 ,..., atn } .
В отмеченных выше условиях задача идентификации объекта сводится, очевидно, к вычислению оценок
atj , сходящихся к истинным значениям α j его параметров. Для ее решения
можно воспользоваться многими известными в настоящее время рекуррентными алгоритмами
[3–5]. Наиболее популярным из этих алгоритмов является одноточечный оптимальный алгоритм, о котором шла речь выше. Аналитически данный алгоритм представляется следующей
рекуррентной формулой:
at = at −1 +
где
yt − ( xt , at −1 )
xt ; t = 1,2,3,... ,
( xt , xt )
(2)
a t −1 – вектор оценок параметров объекта, вычисленный на предшествующем (t − 1) -м
такте оценивания;
a t – новый вектор оценок, вычисляемых на текущем t-м такте управления;
x t – n -мерный вектор измеренных значений входных воздействий в момент времени t ;
yt – измеренное значение выхода объекта в этот же момент времени.
Введя вектор ∆a t = a t − a t −1 – вектор поправок имеющихся оценок
можно непосредственно видеть, что он удовлетворяет равенству ∆at =
a t −1 , из формулы (2)
yt − ( xt , at −1 )
xt и, сле( xt , xt )
довательно, является коллинеарным вектору x t . Отсюда в свою очередь легко видеть, что абсолютное значение ∆a t , j поправки имеющейся оценки a t −1, j параметра αi пропорционально
155
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
абсолютному значению x tj
j -го компонента вектора x t , j = 1, n . При этом коэффициент про-
порциональности q t , определяемый равенством qt =
yt − ( xt , at −1 )
, является одним и тем же
( xt , xt )
числом для всех вычисляемых поправок ∆a tj .
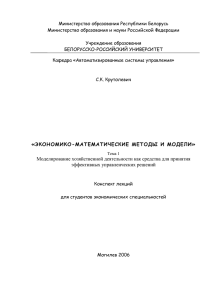
Предельно наглядно процесс подстройки оценок a t −1 в соответствии с данным алгоритмом иллюстрирует рис. 1, где представлена его геометрическая интерпретация в случае, когда
n = 2.
xt2, at2
1
at-1
3
at+1
α2
at
2
α1
xt1, at1
Рис. 1 – Оптимальный одношаговый алгоритм
На рис. 1 приняты следующие обозначения: 1 – прямая, соответствующая измерениям,
поступившим в момент времени t ; 2 – прямая, соответствующая значениям входных воздействий и выхода объекта в момент времени t − 1 ; 3 – прямая, соответствующая значениям входных воздействий и выхода объекта в момент времени t + 1 .
2 Модификации оптимального одношагового алгоритма (2)
Как уже было отмечено выше, основным недостатком оптимального одношагового алгоритма (2) является его низкая скорость сходимости в случае, когда направления векторов входных воздействий x t и x t −1 в соседних измерениях мало отличаются друг от друга. Предлагаемые ниже модификации в ряде случаев позволяют избавиться от данного недостатка или существенно уменьшить его. Идея, на которой основаны рассматриваемые ниже алгоритмы,
состоит в том, что наряду с результатами измерений входных воздействий и реакции объекта
на эти воздействия при определении оценок параметров объекта используются и их
усредненные значения. Это позволяет уточнять имеющиеся оценки даже в случае, когда
соответствующие им входные величины оставались неизменными с момента предыдущего
измерения.
156
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
Первая модификация алгоритма (2). Вычисление оценок параметров объекта с помощью данной модификации алгоритма (2) сводится к выполнению следующих действий.
1. Вычисление промежуточного вектора оценок a t в соответствии с алгоритмом (2), ис1
пользуя при этом измеренные в момент времени t значения вектора xt и скаляра y t ;
2. Вычисление промежуточных оценок at по имеющимся усредненным значениям x t −1 и
2
y t −1 , полученным на основе поступивших в моменты t = 1,2,..., t − 1 измерений входа x и выхода y объекта, с использованием при этом алгоритма (2);
3. Усреднение значений входных воздействий и значений выхода с учетом измерений,
поступивших на момент времени t , в соответствии со следующей формулой:
bt =
где
t −1
1
bt −1 + ct ,
t
t
(3)
bt – среднее значение измеряемой величины в момент времени t ;
bt −1 – среднее значение данной величины в предыдущий момент;
ct – значение измеряемой величины в момент времени t .
4. Вычисление вектора оценок a t согласно алгоритму (2) по новым усредненным значе-
ниям x t и yt входных воздействий x объекта и его реакции y .
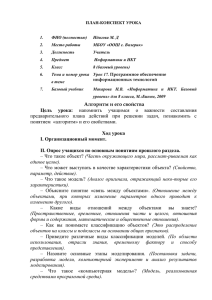
Геометрическая интерпретация данной модификации алгоритма (2) приведена на рис. 2.
xt2, at2
2
at-1
a2t
α2
at
3
a1t
1
α1
xt1, at1
Рис. 2 – Первая модификация алгоритма (2)
На рис. 2 приняты следующие обозначения: 1 – прямая, соответствующая измерениям,
поступившим в момент времени t ; 2 – прямая, соответствующая средним значениям входных
157
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
воздействий и выхода объекта в момент времени t − 1 ; 3 – прямая, соответствующая средним
значениям входных воздействий и выхода объекта в момент времени t .
Вторая модификация алгоритма (2). Как и в приведенной выше модификации алгоритма
(2), для определения параметров объекта здесь также используются усредненные значения
входных воздействий и реакции объекта. Однако состав и порядок выполнения вычислительных операций здесь существенно иной и сводится к следующему.
1. При поступлении измерений x t и y t в момент времени t осуществляется вычисление
компонентов промежуточного вектора оценок
a t1 в соответствии с алгоритмом (2).
2. Вычисляются средние значения входных воздействий
измерений
x t и выхода объекта y t с учетом
x t и y t в соответствии с формулой (3).
3. Используя промежуточный вектор оценок
выходной величин, вычисляется вектор оценок
a t1 и новые усредненные значения входных и
a t в соответствии с алгоритмом (2). Геометри-
ческая интерпретация данной модификации алгоритма (2) представлена на рис. 3.
xt2, at2
2
at-1
at
α2
3
a1t
1
α1
xt1, at1
Рис. 3 – Вторая модификация алгоритма (2)
На рис. 3 приняты следующие обозначения: 1 – прямая, соответствующая средним значениям входных и выходной переменных в момент времени t − 1 ; 2 – прямая, соответствующая
измерениям
xt и yt , поступившим в момент времени t ; 3 – прямая, соответствующая средним
значениям входных и выходной переменной в момент времени t .
Третья и четвертая модификации алгоритма (2). Наряду с идеей, лежащей в основе
рас-смотренных выше первой и второй модификаций алгоритма (2), в основу данной и сле-
158
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
дующей его модификаций положена идея использования не непосредственно измерений
xt и
y t , а их изменений ∆x t и ∆y t , удовлетворяющих равенствам: а) ∆xt = x t − xt −1 ; б)
∆yt = yt − yt −1 .
Вычисление оценок
a t с помощью данной модификации производится в следующей по-
следовательности.
1. Получение первого промежуточного вектора оценок
at1 = at −1 +
at1 в соответствии с равенством
∆yt − ( ∆xt , at −1 )
∆xt , t = 1,2,3,... ,
( ∆xt , ∆xt )
(4)
являющимся, очевидно, не чем иным, как алгоритмом (2), записанным применительно к вектору
∆xt и значению ∆yt .
2. Вычисление компонентов второго промежуточного вектора оценок
at2 согласно
формуле
at2 = at1 +
где
∆yt −1 − ( ∆xt −1 , at1 )
∆xt −1 , t = 1,2,3,... ,
( ∆xt −1 , ∆xt −1 )
∆x t −1 – вектор средних значений изменений входных величин в момент времени t–1;
∆yt −1 – среднее значение изменений выходной величины в момент времени t–1.
3. Вычисление средних значений ∆x t и ∆yt в соответствии с формулой (3).
4. Вычисление вектора оценок at параметров объекта согласно равенству
at = at2 +
∆yt − ( ∆xt , at2 )
∆xt , t = 1,2,3,...
( ∆xt , ∆xt )
Отметим следующее весьма важное обстоятельство. Как вытекает из равенства (4), если
∆xtj = 0 , что, очевидно, возможно только в случае, когда xtj = x( t −1) j , то поправка ∆atj = 0 и,
следовательно, atj = a( t −1) j π . Иначе говоря, если значение j-го входного воздействия в момент
времени t осталось таким же, каким оно было и в момент времени t–1, то и оценка atj окажется
равной имеющейся оценке a( t −1) j . Такой образ действий здесь вполне логически оправдан, так
как вектор
xt во всех подобных случаях не содержит какой-либо новой информации о зависи-
мости выхода объекта от его j-го входного воздействия и соответственно у нас нет каких-либо
оснований изменять имеющуюся оценку a( t −1) j .
Четвертая модификация алгоритма (2) по своей вычислительной схеме соответствует
изложенной выше второй его модификации и состоит из следующих этапов.
1. Получение промежуточного вектора оценок
at1 параметров объекта по формуле (4).
159
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
2. Усреднение приращений выходной величины ∆yt и вектора входных воздействий ∆xt
по формуле (3) и получение новых значений ∆xt , ∆yt .
3. Вычисление вектора оценок
a t согласно формуле
∆yt − ( ∆xt , at1 )
at = a +
∆xt , t = 1,2,3,...
( ∆xt , ∆xt )
1
t
Завершая описание сущности предлагаемых модификаций, отметим, что все они, как и
базовый алгоритм (2), являются проекционными алгоритмами. При этом проецирование имеющихся оценок
at -1 осуществляется на гиперплоскости, направляющими векторами которых яв-
ляются векторы
мые оценки
x t , ∆xt −1 и ∆xt , параллельно данным векторам, и, таким образом, вычисляе-
at1 , at2 и a t являются ортогональными проекциями оценок at -1 на соответствую-
щие гиперплоскости.
Из вышеизложенного видно, что с точки зрения программной и аппаратной реализации
предлагаемые алгоритмы ненамного сложнее, чем положенный в их основу оптимальный одношаговый алгоритм. В то же время использование в данных алгоритмах не только текущих
измерений входных воздействий и реакции объекта на эти воздействия, но и их усредненных
значений позволяет надеяться на то, что рассмотренные алгоритмы обладают более высокой
помехоустойчивостью и приемлемой скоростью сходимости.
3 Методика проведения численных экспериментов
Для проверки работоспособности предложенных в [1] модификаций оптимального одноточечного алгоритма и исследования их свойств нами был проведен ряд численных экспериментов, выполненных c применением компьютера в соответствии со следующей методикой.
В качестве имитатора управляемого объекта во всех экспериментах использовалось соотношение вида
yt = α1 xt1 + α2 xt 2 ,
где
(5)
yt – значение выхода объекта в момент времени t;
xtj – значение j-го входа в этот же момент времени t, j = 1,2 ;
α1 , α2 – независящие от времени параметры, равные 1,5 и 2,0 соответственно.
Соответственно этому во всех экспериментах предполагалось, что модель объекта имеет
вид yˆ t = at1 xt1 + at 2 xt 2 , где yˆ t – оценка выхода объекта в момент времени t; at1 , at 2 – оценки
*
*
параметров α1 и α 2 объекта в этот же момент времени.
Значения компонентов xt1 и xt 2 вектора входных воздействий
дующими четырьмя способами.
xt генерировались сле-
160
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
1. С помощью генератора псевдослучайных чисел с равномерным законом распределения в интервале [–1;1], входящего в состав программного обеспечения компьютера.
2. Задавались соотношениями xt1 = 1,0 и xt 2 = t , где t = k ∆t ,
k = 1,2,3,... , а ∆t – вели-
чина шага дискретизации времени, численные значения которой в каждом эксперименте являются постоянными, но в различных экспериментах могут быть, вообще говоря, различными.
3. Задавались соотношениями xt1 = t и xt 2 = t , где значения t определяются условия2
ми, оговоренными выше.
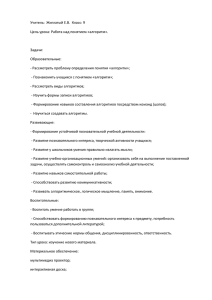
4. Задавались таким образом, чтобы угол между векторами
xt −1 и xt при всех значениях
t был постоянным. Формирование набора векторов входных воздействий, удовлетворяющих
данному условию, осуществлялось следующим образом (рис. 4). Прежде всего задавались угол
между векторами входных воздействий ∆ϕ и их длина l x . Далее, используя заданные значения
∆ϕ и l x , вычислялись значения компонентов вектора xt в соответствии с соотношениями
xt1 = l x cos ϕt и xt 2 = l x sin ϕt , где xt1 и xt 2 – первый и второй компоненты вектора xt ; ϕt –
угол между вектором
xt и осью Ox1 , значения которого задавались согласно соотношению
ϕt = ϕt−1 − ∆ϕ , где ∆ϕ – величина, имеющая постоянное абсолютное значение, а ее знак изменяется случайным образом, что позволяет изменять направление вращения вектора входных
воздействий.
x2
xt2
xt
x(t-1)2
xt-1
∆ϕ
ϕt
ϕt-1
О
xt1
x(t-1)1
Рис. 4 – Генерирование векторов входных воздействий с постоянным углом между ними
x1
161
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
Значения выхода y t во всех перечисленных случаях вычислялись с использованием заданных значений xt1 и xt 2 в соответствии с соотношением (5).
Исследование помехоустойчивости рассматриваемых алгоритмов проводилось в условиях, когда с ошибками задавались только значения выхода объекта. При этом в качестве изме-
yt , определяемые в соответствии
ренных значений выхода объекта использовались значения ~
с соотношением y% t = yt + εt ; t = 1,2,3,... , где yt – истинное значение выхода объекта, а εt –
некоторое значение ошибки его измерения в момент времени t , формируемое согласно равенству εt = βξt yt , где β – коэффициент, изменяемый в интервале
[0;1] и позволяющий соответ-
ственно устанавливать желаемый диапазон значений ошибок измерения; ξt – значение равномерно распределенной в интервале
[–1;1] ошибки ξ , получаемое с помощью генератора псев-
дослучайных чисел.
В качестве правила останова процесса подстройки оценок
at во всех случаях использо-
валось неравенство вида at − α ≤ ∆ , где at − α – евклидова норма вектора
at − α ; ∆ –
некоторое достаточно малое заданное число, больше нуля.
Во всех экспериментах в качестве вектора начальных оценок a01 и a02 параметров объекта α1 и α 2 использовался вектор
a0 = (1,0; 1,0) .
4 Некоторые результаты выполненных экспериментов
Экспериментальные исследования всех рассматриваемых алгоритмов проведены в соответствии с одной и той же изложенной выше методикой. Данное обстоятельство позволяет надеяться, что все приведенные ниже сравнения свойств исследуемых алгоритмов являются корректными. Полученные результаты данных исследований сводятся к следующему.
Во-первых, в тех случаях, когда значения входных переменных и выхода объекта задаются точно (измеряются без ошибок), все исследуемые алгоритмы сходятся монотонно по евклидовой норме, обеспечивая наперед заданную точность вычисляемых оценок (табл. 1).
При этом скорость сходимости всех алгоритмов существенно зависит от значений входных воздействий и прежде всего от тесноты линейной зависимости между векторами
xt −1 и xt ,
t = 1,2,3,... , значений входных переменных в соседние моменты времени. В случаях, когда компоненты векторов входных воздействий мало отличаются в соседних измерениях, скорость сходимости всех рассматриваемых алгоритмов мала и оказывается тем меньше, чем меньше отличие векторов (рис. 5). Наблюдаемая немонотонность скорости сходимости третьего и четвертого алгоритмов, скорее всего, определяется численными значениями параметров модели.
Во-вторых, сходимость исследуемых алгоритмов не зависит от выбора начальных оценок
параметров объекта и имеет место при произвольных значениях данных оценок.
162
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
В-третьих, при наличии ошибок измерений выхода объекта монотонность сходимости по
евклидовой норме оценок, получаемых с помощью исследуемых алгоритмов, к своим истинным
значениям нарушается (рис. 6). При этом монотонность и скорость сходимости всех алгоритмов
существенно зависят от величины ошибок измерения выхода объекта.
Таблица 1 – Результаты исследования алгоритмов на точность получаемых оценок и скорость сходимости
Требуемая точность
0,0001
0,0005
0,001
0,005
0,01
0,05
0,1
N
12
7
7
6
5
3
3
Базовый
Норма
0,00008
0,00041
0,00041
0,00124
0,00847
0,01831
0,01831
N
7
5
5
5
5
5
3
Алгоритм 1
Норма
0,00004
0,00050
0,00050
0,00050
0,00050
0,00050
0,06758
N
7
7
7
5
5
5
5
Алгоритм 2
Норма
0,00005
0,00005
0,00005
0,00100
0,00100
0,00100
0,00100
N
10
9
8
8
8
7
7
Алгоритм 3
Норма
0,00001
0,00016
0,00057
0,00057
0,00057
0,04321
0,04321
N
11
10
9
9
8
8
7
Алгоритм 4
Норма
0,00006
0,00025
0,00091
0,00091
0,00639
0,00639
0,09541
Примечания: 1) N – число итераций алгоритма для обеспечения заданной точности; 2) компоненты вектора входных воздействий являются случайными величинами с равномерным законом распределения.
Алгоритмы
Рис. 5 – Зависимость скорости сходимости алгоритмов от угла между векторами входных воздействий
В-четвертых, первый и второй алгоритмы, как показали эксперименты, обладают большей помехоустойчивостью по сравнению с третьим и четвертым алгоритмами; при малых углах
между векторами входных воздействий первый и второй алгоритмы уступают в скорости сходимости третьему и четвертому алгоритмам.
В-пятых, недостатком третьего и четвертого алгоритмов является то, что в случае, когда
какая-либо из входных переменных объекта не изменяется в соседних тактах оценивания, они
не уточняют оценку соответствующего ей параметра объекта. Соответствующие результаты
163
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
приведены в табл. 2. В то же время данные алгоритмы среди рассматриваемых алгоритмов
обладают большей скоростью сходимости в случаях, когда направления векторов входных воздействий мало отличаются друг от друга (см. рис. 5)
Рис. 6 – Сходимость первого алгоритма при наличии помех
В-шестых, всем исследуемым модификациям оптимального одношагового алгоритма
присущи следующие основные недостатки: большее количество арифметических операций,
производимых на одном такте для уточнения оценок параметров объекта, и, как следствие,
увеличение затрат времени на реализацию одного такта оценивания; необходимость использования дополнительной памяти для хранения промежуточных значений оценок параметров объекта, средних значений входных воздействий и выхода объекта.
Таблица 2 – Результаты эксперимента (вектор входных воздействий (1,t))
Евклидова норма между вектором оценок и вектором параметров объекта
Базовый
0,99495
0,99403
0,99359
0,99320
0,99285
0,99256
0,99232
0,99211
0,99194
0,99181
0,99170
0,99164
0,99163
0,99162
0,99111
Алгоритм 1
0,99495
0,91970
0,78049
0,58324
0,37733
0,21048
0,10192
0,04346
0,01663
0,00584
0,00192
0,00096
-------------------
Алгоритм 2
0,99495
0,92465
0,78963
0,59499
0,38880
0,21936
0,10754
0,04646
0,01802
0,00641
0,00214
0,00108
0,00096
-------------
Алгоритм 3
------0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
Алгоритм 4
------0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
∆t = 0,01
Итерация
1
20
30
40
50
60
70
80
90
100
110
116
117
118
500
Угол
0,0001
0,5520
0,5271
0,4956
0,4602
0,4232
0,3863
0,3511
0,3181
0,2879
0,2606
0,2455
0,2431
0,2407
0,0221
164
Доклады ТУСУРа. 2004 г. Автоматизированные системы обработки информации, управления и проектирования
Все исследованные алгоритмы не обеспечивают монотонной сходимости вычисляемых
оценок к истинным значениям параметров объекта (рис. 7).
Рис. 7 – Процесс оценивания одного из параметров объекта
Заключение
Основываясь на изложенных выше результатах, можно заключить, что полученные алгоритмы обладают большей помехоустойчивостью и обеспечивают более высокую скорость сходимости получаемых с их помощью оценок к истинным значениям параметров объекта, чем
положенный в их основу оптимальный одношаговый алгоритм, при этом они ненамного сложнее в программной реализации. Все это позволяет говорить о том, что синтезированные алгоритмы вполне пригодны для практической реализации.
Для решения вопроса о возможности использования рассмотренных алгоритмов в той
или иной конкретной системе управления требуются дополнительные исследования, которые
необходимо проводить с учетом особенностей объекта ее управления, а также видов входных
воздействий и помех на входах и выходе объекта.
ЛИТЕРАТУРА
1. Адаптивные автоматические системы: Сборник статей под ред. Г.А. Медведева. - М.:
Советское радио, 1972. – 184 с.
2. Рубан А.И. Адаптивное управление с идентификацией. – Томск: Изд-во Том. гос. ун-та,
1983. – 136 с.
3. Райбман Н.С. Построение моделей процессов производства / Н.С. Райбман, В.М. Чадеев. – М.: Энергия, 1975. – 376 с.
4. Лившиц К.И. Идентификация: Учеб. пособие. – Томск: Изд-во Том. гос. ун-та, 1981. –
132 с.
5. Эйкхофф П. Основы идентификации систем управления. – М.: Мир, 1975. – 683 с.