Численный метод решения геометрически нелинейных
реклама

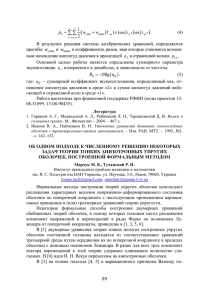
Н. Г. БУРАГО, В. Н. КУКУДЖАНОВ УДК 624.074.4.04:539.374:681.3 Численный метод решения геометрически нелинейных осесимметричных задач для упругопластических оболочек вращения 1. Введение. Конечные осесимметричные перемещения упругопластических оболочек при квазистатическом деформировании до самого последнего времени изучались исключительно на основе деформационной теории пластичности Генки-Ильюшина (см. обзор [1]). Такое предпочтение, по-видимому, основано на том мнении, что эта теория позволяет получить решение более простым путем, нежели теория течения, так как не требует последовательного прослеживания процесса деформирования. Однако во многих случаях в силу характера задачи (построение зависимостей нагрузка—«общая» деформация при исследовании выпучивания в большом) или из-за вычислительных причин (обеспечение сходимости итерационных процессов) необходимо последовательное прослеживание процесса деформирования. Это лишает деформационную теорию указанного преимущества. С другой стороны, в большинстве геометрически нелинейных задач реализуется сложное нагружение, требующее привлечения физически более обоснованной теории упругопластического течения, учитывающей историю нагружения. В первых работах [2—4], посвященных расчету осесимметричного выпучивания оболочек вращения с позиций теории течения Прандтля—Рейсса, использовались уравнения геометрически нелинейной теории оболочек, в которых удержаны квадратичные члены относительно углов поворота нормалей к срединной поверхности, а параметры геометрии срединной поверхности отнесены к ее исходному недеформировапному состоянию. В то же время, при исследовании выпучивания в большом упругих сферических оболочек [5,6] использовалась более точная, так называемая модифицированная [5] теория конечных осесимметричных перемещений тонких непологих оболочек Э. Рейсснера [7], в которой влияние поворотов нормалей учтено полностью, а параметры геометрии отнесены к текущему деформированному состоянию. Было показано, что влияние уточняющих членов на величины верхних критических нагрузок может достигать порядка 10%. Очевидно, па закритических режимах деформирования это влияние будет еще более существенным. В работе [8] был предложен численный метод расчета докритического деформирования оболочек вращения из материалов со сложной реологией, в основу которого были положены уравнения типа модифицированной теории Э. Рейсснера. Метод был применен для расчета круглых пластин и цилиндрических оболочек по теории течения. В настоящей работе предлагается метод, основывающийся на модифицированной теории Э. Рейсснера и теории упругопластического течения, пригодный для изучения квазистатических процессов осесимметричного деформирования оболочек вращения, включая закритические режимы. 2. Исходные уравнения. Соотношения модифицированной теории оболочек Э. Рейсснера имеют следующий вид: 0 ; u r r0 , w z z 0 , r' cos , z' sin , 0 / 0 1, 0 r / r0 1, ' / 0 , (sin 0 sin ) / r0 , 0 , 0 , H N cos Q sin , V N sin Q cos , ( rV)'rp V 0, ( rH )'N rp H 0 , ( rM )'M cos rQ 0 , p V p V ( r , , z, , p) , p H p H ( r , , z, , p) , h/2 Ni i d, M i h/2 h/2 d, i (i , ) h/2 (1) здесь штрих означает дифференцирование по пространственному параметру ( a b ); r0 , z 0 , 0 , 0 —заданные функции от , характеризующие начальную геометрию оболочки (см. рис. 1); аналогичные геометрические характеристики для деформированного состояния оболочки обозначены через r , z , , ; 0 , —коэффициенты Лямэ вдоль образующей; —координата, отсчитываемая от срединной h —толщина оболочки ( h / 2 h / 2 ); ( —угол поворота нормали; u , w , H , V и p H , p V —проекции вектора перемещения точек срединной поверхности, главного вектора сил в меридиональной плоскости и вектора распределенной нагрузки на оси x1 и x 2 . поверхности вдоль нормали; 44 Полагаем, что в общем случае p V и p H могут зависеть от параметров текущей геометрии срединной поверхности, пространственного параметра с и 'параметра нагрузки p . Остальные обозначения являются общепринятыми. Соотношения теории упругопластического течения удобно представить в следующем виде: t g11 t g12 t , t g11 t g12 t где t Рис. 1 (2) означает дифференцирование по «времени» (параметр «времени» определяется ниже), а коэффициенты g ij ( i, j 1,2 )—заданные функции напряжений , , деформаций , , констант материала и параметров упрочнения. Поясним понятие параметра «времени». В формулировке задач последовательного прослеживания процессов деформирования всегда фигурирует величина типа времени, независимое монотонное изменение которой определяет развитие таких процессов. Например, в задачах о докритическом деформировании роль «времени» обычно играет параметр нагрузки. В задачах о выпучивании в большом и о закритических деформациях роль «времени» на отдельных участках процесса деформирования играют либо параметр нагрузки, либо характерное перемещение, характерная деформация и т. п. величины. В общем случае для квазистатнческих задач выпучивания оболочек параметр «времени» можно определить как некоторый функционал от решения: t T ( ) где (3) ( w, , u , V , H , M , , , p ) — совокупность основных величин. Остальные искомые величины нетрудно выразить через основные с помощью соотношений (1). Совокупность величин в дальнейшем будем называть решением задачи. Вид функционала (3) может быть различным для различных этапов процесса деформирования и подбирается так, чтобы монотонное возрастание величины t на данном этапе отвечало физической сущности задачи. Выбранный вид функционала (3) считается пригодным, пока производные по «времени» от решения в некоторой норме не превосходят наперед заданного числа: * 0 , | | * . Нарушение этого условия приводит к необходимости смены параметра «времени», т. е. смены вида функционала (3). В некоторых задачах о выпучивании удается так подобрать вид функционала (3), что необходимость смены параметра вообще не возникает. Например, в задачах о выпучивании сферических куполов под действием внешнего давления к такому результату приводит задание функционала (3) в виде 1 b T wd / ( b a ) h a (4) Максимум и минимум функции p(t), определяемой в результате решения задачи, соответствуют верхней и нижней критическим нагрузкам. Система уравнений (1—3) дополняется начальным и граничными условиями: |t 0 0 (5) U a y|a Va , U b y|b Vb (6) где y ( w , , u, V, H , M ) . Полагаем, что граничные условия (6) удовлетворяют известным ограничениям, вытекающим из принципа виртуальной работы [7]. Векторы. Va и Vb могут зависеть от параметра нагрузки (действие на оболочку краевых сил и моментов). ' 3. Метод решения. Нпже строится шаговая процедура последовательного прослеживания процесса деформирования. В пределах малого шага по «времени», проводится квазилинеаризация исходных нелинейных уравнений путем дифференцирования но параметру [9]. Продифференцируем уравнения (1), (3) и условия (6) по «времени», в результате ПОЛУЧИМ соотношения, линейные относительно «скоростей» искомых величин (т. е. производных от этих величин по «времени»). Объединяя эти соотношения с соотношениями (2) , преобразуем эту систему соотношений так, чтобы она , в результате получим: Va Vb , U b y * | b p p содержала только «скорости» основных величин y'* Ay* F , U a y* |a (7) 45 * (g11 E1 g12 E 2 ) y* , * (g 21 E1 g 22 E 2 ) y* 9 p (T / i ) i* i 1 (8) 1 где введены следующие обозначения y* y / p , * / p , * (9) / p , i* i / p (10) i — компоненты вектора решения . Матрица A и векторы F , E 1 , E 2 в соотношениях для «скоростей» (7)--(9) являются вполне определенными нелинейными функциями компонентов вектора решения. Конкретные выражения для этих функций здесь не приводятся ввиду их громоздкости. По заданному в некоторый момент «времени» вектору основных величин можно найти соответствующий вектор «скоростей» Действительно, по формулам (1) можно найти остальные искомые величины. Затем, можно определить коэффициенты связи между «скоростями» напряжений и деформаций g ij . Далее, по формулам, упомянутым выше, находим матрицу A и векторы F , E1 , E 2 . Решая краевую задачу (7), y* , затем по формулам (8) величины * , * . Окончательно, по формуле (9), определим «скорость» параметра нагрузки и по формулам (10) «скорости» остальных основных величин . Для описанной выше совокупности операций по определению «скоростей» основных величин введем находим вектор следующее обозначение () (11) Алгоритмы численного решения задачи Коши (11), (5) могут быть построены по аналогии с известными методами решения задач Коши для обыкновенных дифференциальных уравнений первого порядка. В настоящей работе были опробованы шаговые-нроцедуры второго порядка точности: метод Эйлера с пересчетом и метод предиктор-корректор. При численной реализации упомянутых выше шаговых процедур напряжения , представлялись в виде сеточных функций в узлах двумерной сетки ( i , j ): i a ih1 , h1 ( b a ) / n , i 0,1,..., n ; j j jh 2 , h 2 h / (2m) , i m,...0,1,..., m ;. Аппроксимация функций, образующих вектор y и решение (12) краевых задач (7) осуществлялись двумя различными путями: а) использовались конечно-разностная аппроксимация и метод ортогональной прогонки [10]; вспомогательные задачи Коши решались по методу. Рунге-Кутта; б) использовалась сплайнаппроксимация [11] и опнсываемый ниже вариант метода сплайнов. Рассмотрим применение сплайнов для решения краевой задачи (7). Решение ищем в виде сплайна 2-й степени, коэффициенты которого обозначим sij : y* () si ,0 si ,1 ( i ) si ,2 ( i ) 2 / 2 где [ i 1 , i ] , i 0,1,..., n 1. Чтобы полиномы (l3) (13) образовали сплайн, подчиним их условиям непрерывности: si 1,0 si ,0 si ,1 h1 si ,2 h12 / 2 , si 1,1 si ,1 si ,2 h1 где i 0,1,..., n 1 . Потребуем, чтобы этот сплайн удовлетворял краевым условиям задачи: U a s0,0 Va / p , U b sn,0 Vb / p и уравнениям задачи в узлах i ( i 0,1,..., n ) si ,1 A|i si ,0 F|i (14) (15) (16) Соотношения (14—16) образуют замкнутую систему уравнений относительно коэффициентов сплайна sij , ( i 0,1,..., n; j 0,1), ( i 0,1,..., n 1; j 2 ), порядок сисгемы линейных алюбранчсских уравнений .равен (18n 12 ). Понизим порядок системы, используя условия непрерывности (14). По индукции из условий непрерывности нетрудно получить следующие формулы, дающие явную связь между основными ко- 46 коэффициентами сплайна s0,0 , s0,1 ; si,2 ( i 0,1,..., n 1 ) и остальными его коэффициентами i 1 si ,0 s0,0 ih1 s0,1 0.5h12 sk ,0 (2i 2k 1) (17) k 1 Соотношения (17), будучи подставленными в условия непрерывности, обращают их в тождества. Подставим соотношения (17) в уравнения (15, 16), в результате получим замкнутую систему уравнений относительно основных коэффициентов сплайна: n 1 U a s0,0 Va / p , U a s0,0 nh1 s0,1 0.5h12 sk ,2 (2n 2k 1) Vb / p k 1 i 1 A| i s0,0 [ E ih1A| i ]s0,1 h1E 0.5h12 A| 1 (2i 2 k 1) sk ,2 F| i k 0 где E - единичная матрица. Эта система уравнений имеет порядок 6( n 2) , матрица системы имеет квазнтреугольный вид и легко формируется. Для решения этой системы уравнений применялся метод исключений Гаусса, при этом учитывалась структура матрицы системы. 4. Результаты расчетов. Описанные выше алгоритмы реализованы в виде программ .для ЭВМ БЭСМ-6. Отладка программ проводилась с использованием известных численных решений для а) физически и геометрически нелинейных задач о докритическом деформировании круглых пластин [12] (связь между напряжениями и деформациями принималась в виде продифференцированных по «времени» соотношений деформационной теории пластичности) и б) геометрически нелинейных задач о выпучивании и о закритических деформациях упругих сферических куполов [13]. Результаты расчетов по различным программам хорошо согласуются между собой и с упомянутыми выше .известными данными. Эффективность метода сплайнов и метода ортогональной прогонки сравнивалась на примере .пшенной задачи изгиба упругой круговой тороидальной оболочки, нагруженной внутренним давлением. Решение контролировалось по результатам работы [14]. Установлено, что в диапазоне параметров геометрии [3(1 )]1/ 4 L m / ( Rh) 1/ 2 25 30 решение задач с точностью порядка 1—3% целесообразнее получать методом сплайнов, который в этом случае дает значительный выигрыш в вычислительной работе (здесь —параметр непологости; L m —длина меридиана; R —минимальный радиус кривизны срединной поверхности; h —толщина оболочки; —коэффициент Пуассона). Параметр разбиения по меридиану при этом имеет величину n 10 40 . Вне указанного диапазона и при решении задач с большей точностью, более эффективным является метод ортогональной прогонки. Для определения верхних критических нагрузок с точностью порядка 1—3% при расчете с постоянным по «времени» шагом необходимо, чтобы до первого максимума диаграммы равновесных состояний укладывались 20—30 шагов. При решении упруго-пластических задач точность решения порядка 1—3% обеспечивается выбором параметра разбиения по толщине m 5 10 (т. е. 10—20 расчетных точек по толщине). Рассмотрим задачу о выпучивании неподвижно защемленного по контуру сферического купола под действием внешнего давления. Исходные данные примем следующие: 0 () 1570796 . , r0 () R cos , z 0 () R sin , p V p cos , p H p sin , R / h 100, 0.3, 0 () R , a 0.785400 , , b 1570796 . s 0.26810 2 здесь E —модуль Юнга; пределы изменения параметра соответствуют углу полураствора купола 45°; выражения для проекций распределенной нагрузки на оси координат записаны с учетом изменения формы купола в процессе деформирования; R —радиус кривизны меридиана в недеформнрованном состоянии; s — деформация, соответствующая пределу текучести s . Диаграмма деформирования материала оболочки задавалась таблично (см. таблицу) с последующей линейной интерполяцией. / s 0 0 !.0 1,13 1.35 1,46 1,54 1.57 1.63 1,66 / s 0.0 1.0 1,49 2,24 2,98 3,74 4,48 5,96 7,48 47 , Рис. 2. 3. 4 Выражение для параметра «времени» принималось в форме (4). Выбор параметра (4) в качестве «времени» подсказывают рсзультаты экспериментов [15]. Для непосредственного использования этого параметра в процессе решения необходимо выражение (4) подставить в общее уравнение (9). .Легко видеть, что в этом частном случае уравнение (9) принимает следующий вид: 1 1 b p w *d / ( b b ) h a , w* w / p Рассматриваемый пример исследовался ранее в [4] с помощью численного алгоритма, использующего в качестве «времени» параметр нагрузки. В этой работе также используется теория упругопластического течения, однако уравнения геометрически нелинейной теории оболочек приняты в упрощенной форме. Верхняя критическая нагрузка, определенная в [4] по расходимости алгоритма, оказалась равной 2 1/ 2 2 p p / p * 0.78 (где p * 2E / (3(1 )) (h / R) —критическая нагрузка, предсказываемая для полной упругой сферической оболочки линейным бифуркационным анализом). Этот уровень нагрузки показан пунктиром “б” на рис. 2. Пунктир “а” на рисунке соответствует верхней критической нагрузке, определенной для рассматриваемого случая по геометрически нелинейной теории, но без учета пластических эффектов ( p 0.92). В результате проведенного в настоящей работе решения получена диаграмма «параметр нагрузки—прогиб в центре», представленная на рис. 2 сплошной линией. Максимум этой кривой соответствует верхней критической нагрузке p 0.67, что на 16% ниже результата работы [4]. Это показывает, что влияние уточняющих членов • в уравнениях геометрически нелинейной теории оболочек имеет в случае упругопластических оболочек такой же порядок, как и для упругих оболочек, и кроме того, что критические нагрузки, определенные по расходимости алгоритмов, использующих параметр нагрузки в качестве «времени», можно рассматривать лишь как весьма приближенные. На рис. 3 показаны формы прогиба срединной поверхности оболочки в направлении нормали к недеформированному меридиану для различных моментов процесса (соответствующие этим моментам «времени» точки на рис. 2 помечены цифрами 1, 2, 3, 4). На рис. 4 приведены картины расположения зон упругого (отсутствие штриховки) и пластического (косая штриховка) состояний материала оболочки для моментов «времени» 2 и 4. Горизонтальной штриховкой помечены зоны, где ранее материал был в пластическом состоянии, а в рассматриваемый момент претерпевает разгрузку. Вертикальной штриховкой помечены зоны вторичных пластических деформаций. Выводы. Предложенный метод позволяет исследовать в уточненной постановке класс важных в практическом и теоретическом отношениях осесимметричных задач о выпучивании и закритических деформациях упругопластических оболочек вращения. Результаты численных расчетов свидетельствуют о сложном характере нагружения, реализующегося при выпучивании упругопластических оболочек. Поэтому использование теории упругопластического течения при анализе данного класса задач представляется необходимым. СПИСОК ЛИТЕРАТУРЫ 1. А. И. Стрельбицкая. Упругопластические деформации и несущая способность пологих оболочек. Прикладная механика, АН УССР, т. 9, 1973. 2. Ю. М. Волчков, А. В. Павлов. Упругопластическое деформирование цилиндрической оболочки с поперечными ребрами под действием гидростатического давления. Тр. 7-й Всес. конф. по теории пластин и оболочек. «Наука», 1970. З. Y. С. Hayes, Lee L. N. Н. Inelastic buckling of axisyminetrical shells. Proc. Amer. Soc. Civ. Eng., Eng. Mech. Div., 1970, v. 96, N 6, 1107—1124. 4. R. К. Emerton, N. F. Моггis. Symmetric Buckling of Inelastic Spherical Shells under External Pressure, Proc. Amer. Soc. Civ. Eng ., Eng. Mech. Div. 1972, v. 98. N 6. 1417—1433. 5. Э. И. Григолюк, В. И. Мамай, А. Н. Фролов. Исследование устойчивости непологих сферических оболочек при конечных перемещениях на основе различных уравнений теории оболочек. «Известия АН СССР». МТТ, 1972, N. 5. . 48 6. Н. В. Валишвили. О пределах применимости нелинейных уравнений пологих оболочек. «Известия вузов». Машиностроение, 1972. № 5. 7. Е. Reissner. Alisymmetrical Deformations of Thin Shells of Revolution, Proc. of Symp. In Appl. Math., Ameг. Math. Soc., v. 3. 1950. p. 27—52. 8. И. В. Ширко. В. Л. Якушев. Осесимметричные деформации оболочек вращения со сложной реологией. .Матер. 9-й Всес. конф. по теории пластин м оболочек. Л., 1973. 9. Д. Ф. .Давиденко. 06 одном новом методе численного решения систем нелинейных уравнений. ДАН СССР, 88, 1953, № 4. 10. С. К. Годунов. О численном решении краевых задач для систем "обыкновенных дифференциальных уравнений. УМН, 1961, т. 16, № 3. 11. Дж. Алберг, Э. Нильсон, Дж. Уолш. Теория сплайнов и ее приложения. М.. «Мир». 1972. 12. Б. А. Горлач. Упругопластическое состояние круглой пластинки при конечных прогибах.— Сб. «Исслед. по теории пластин и оболочек», вып. 6—7, Казань, 1970. 13. S. К. Radhamоhan, A. V Set1ur, Y. E. Goldberg. Stability of shells by parametric differentiation. Proc. Amcr. Soc. Сiv. Eng., J. Struct. Div., 1971, v. 97, N 6. 14. А. Калнинс. Исследование оболочек вращения при действии симметричной и несимметричной нагрузок Тр. амер. общ. инж. мех. «Прикладная механика», 1964, т. 31, № 3. 15. М. Sunakawa. К. Ichida. Buckling of spherical shells under external pressure, J. Jap. Soc. Aeronaut. and Space Sci., 1973, 21., N 232, 263-270. N 234, 391-393. 49