Моделирование и расчет контактного напряжения в стыке
advertisement

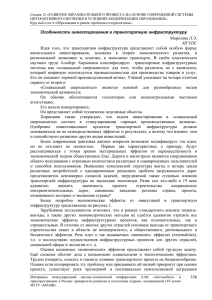
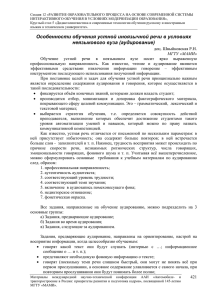
Секция 4 «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ АВТОТРАНСПОРНЫХ СРЕДСТВ». Моделирование и расчет контактного напряжения в стыке жесткого цилиндра и соосного цилиндрического оболочечного элемента, нагруженного давлением герметизируемой среды к.т.н. доцент Герасимов С.В., Пронькина С.А. ГОУВПО "Братский государственный университет" В современных конструкциях автомобилей, сельскохозяйственных, дорожностроительных и коммунальных машин управление рабочими органами осуществляется посредством гидросистемы (гидравлического привода). Одним из важнейших эксплуатационных показателей подвижных соединений гидросистемы является герметичность. Поршни небольшого диаметра (золотники гидрораспределителей, плунжеры гидравлических насосов и т.п.) уплотняют притиркой к поверхностям цилиндров. Для увеличения срока службы предлагаем выполнить поршень в виде тонкостенной цилиндрической оболочки со свободным торцом с возможностью компенсации износа за счет эффекта самоуплотнения. Внешней поверхностью оболочка при работе прижимается к стенкам цилиндра не только силами собственной упругости, но и давлением рабочей жидкости (или газа) действующей на тыльную поверхность оболочки. С целью определения эпюры контактного напряжения, что является исходными данными для расчета герметичности и износа зоны уплотнения, рассмотрим контактную задачу статики для двух тел (упругой цилиндрической длиной L оболочки нагруженной давлением p рабочей среды, и соосного ей жесткого цилиндра) с неизвестной шириной области контакта δ (рис. 1). Анализ существующих решений контактной задачи для оболочечных элементов конструкций показал, что использование классической теории упругих оболочек Кирхгофа-Лява приводит к несоответствию - в точках границы области соприкосновения тонкой оболочки с твердым телом, имеющим гладкое основание (без угловых точек), поперечные силы претерпевают разрыв. Решения по теории оболочек типа Тимошенко – Рейснера, учитывающей эффект поперечного сдвига, позволят снять указанное противоречие и качественно изменить решение. Теория деформации оболочек в рамках модели Тимошенко-Рейснера в настоящее время достаточно полно разработана. Пять уравнений равновесия, восемь соотношений упругости и восемь уравнений деформации (геометрических уравнений), образуют систему из двадцати одного уравнения для нахождения двадцати одного неизвестного [2]. При решении ряда практических задач данная система уравнений может быть значительно упрощена. w0 q(x) р 0 р δ x1 0 x2 L Рисунок 1 - Деформация цилиндрического оболочечного элемента, нагруженного давлением герметизируемой среды Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 37 Секция 4 «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ АВТОТРАНСПОРНЫХ СРЕДСТВ». Предположим, что до деформации оболочки между оболочкой и цилиндром имеется радиальный зазор w0=const. Принимаем допущение, что герметизируемая среда воздействует только на оболочку, цилиндр жесткий, оболочка и цилиндр являются неизношенными, деформация оболочки вызывает лишь нормальную реакцию цилиндра (трение в контакте отсутствует). В этом случае - уравнения равновесия: d N1 ⎧ = 0; ⎪ dx ⎪ dM ⎪ 1 − Q1 = 0; ⎨ dx ⎪ ⎪− d Q1 + 1 N = p ; 3 ⎪⎩ d x R 2 - соотношения упругости: Eh ⎧ (ε 1 + νε 2 ); = N 1 ⎪ 2 1 − ν ⎪ Eh ⎪N 2 = (ε 2 + νε 1 ); ⎪ 1− ν 2 ⎪ 3 ⎨M = E h χ ; ⎪ 1 12 1 − ν 2 1 ⎪ ⎪Q1 = kE h ε 13 ; 2(1 + ν ) ⎪ ⎪⎩ - геометрические уравнения: du ⎧ ⎪ ε1 = d x ; ⎪ w ⎪ ε2 = ; ⎪ R (1) ⎨ dw ⎪ε 13 = ψ u + ; dx ⎪ d ψu ⎪ ⎪⎩ χ 1 = d x , где N1, N2 – интенсивность внутренних нормальных сил в оболочке, Н/мм; M1 – интенсивность внутреннего изгибающего момента, Н·мм/мм; Q1 – интенсивность внутренней поперечной силы, Н/мм; R – радиус срединной поверхности оболочки; p3 внешняя нагрузка, Н/мм2; u, w – компоненты перемещения в осевом и радиальном направлениях; ψ u – угол поворота с учетом сдвига нормали; E – модуль упругости; ν – коэффициент Пуассона; h – толщина оболочки; k – коэффициент сдвига. Сводим исходную систему уравнений (1) к разрешающему уравнению: 2 d 4ψu 1 dp 3 2 d ψu 4 g − + 2 − λ ψ = , (2) u D dx dx 4 dx 2 Eh3 1+ ν Eh 4 D = g2 = ; ; . здесь λ = 12 1 − ν 2 DR 2 kR 2 Компоненты напряженно-деформированного состояния в оболочечном элементе определены следующим образом: d 2ψu dM 1 dψ u Eh ⎛ dQ ⎞ N2 = w = R⎜ 1 + p 3 ⎟ . Q1 = =D M1 = D ; ; (3) 2 dx R dx dx ⎝ dx ⎠ ( ) ( ) Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 38 Секция 4 «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ АВТОТРАНСПОРНЫХ СРЕДСТВ». Отсюда, учитывая, что внутри области контакта p 3 = p − q( x ) , а радиальное перемещение w поверхности оболочки ограничено радиальным зазором w0 , получено выражение для контактного давления q ( x ) : dQ1 Eh q(x ) = + p − 2 w0 . dx R Для удобства решения уравнения (2) поверхность оболочечного элемента разделена на две зоны по наличию и отсутствию контактного давления (см. рис.1): ⎧ p − q( x1 ), 0 ≤ x1 ≤ δ; p3 = ⎨ 0 < x2 ≤ (L − δ ). ⎩ p, Для зоны 0 ≤ x1 ≤ δ , где согласно исходным данным w = w0 = const , уравнение (2) принимает вид d 2ψu − γ 2 ψu = 0 , 2 dx 6k (1 − ν ) . h2 Решение принято в виде где γ = ψ u = C 1 e γ x1 + C 2 e − γ x1 . Тогда из первого уравнения системы (3) имеем: M 1 = Dγ C1 e γ x1 − C 2 e − γ x1 , где C1 , C 2 - постоянные интегрирования. ( (4) ) С учетом разбиения на зоны (см. рис.1) принято граничное условие: M 1 x1 = 0 = 0 . Тогда: C1 = C 2 . Обозначая постоянную интегрирования через C , уравнение (4) можно записать как ψ u = C ch (γ x1 ) . Компоненты напряженно-деформированного состояния в оболочечном элементе для зоны занятой контактом Eh Q1 = D C ch(γ x1 ) γ 2 ; w0 . N2 = M 1 = D C sh (γ x1 ) γ ; R В зоне 0 < x 2 ≤ (L − δ) поверхность оболочечного элемента нагружена только давлением среды p3 = p = const, поэтому уравнение (2) принимает вид 2 d 4ψu 2 d ψu (5) − 2g + λ4 ψ u = 0 . 4 2 dx dx Решение уравнения (5) имеет вид ψ u = A0 B0 ( x 2 ) + A1 B1 ( x 2 ) + A2 B2 ( x 2 ) + A3 B3 ( x 2 ) , причем согласно системе уравнений (3): M 1 = D ( A0 B0′ ( x2 ) + A1 B1′ ( x2 ) + A2 B2′ ( x2 ) + A3 B3′ ( x2 ) ) ; Q1 = D ( A0 B0′′( x2 ) + A1 B1′′( x 2 ) + A2 B2′′( x2 ) + A3 B3′′( x2 ) ) ; R2 (D ( A0 B0′′′( x2 ) + A1 B1′′′( x2 ) + A2 B2′′′( x2 ) + A3 B3′′′( x2 )) + p ) , Eh где А0, А1, А2, А3 – постоянные интегрирования; B0 (x 2 ), B1 ( x 2 ), B2 ( x 2 ), B3 (x 2 ) – функции, предложенные И.А. Биргером [1]: 1 B0 ( x ) = 2 ξ η cosh( ξ x ) cos (η x ) − ξ 2 − η 2 sinh ( ξ x )sin (η x ) ; 2ξ η w= [ ( ) ] Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 39 Секция 4 «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ АВТОТРАНСПОРНЫХ СРЕДСТВ». ( ) ⎡ξ 3η 2 − ξ 2 cosh ( ξ x ) sin (η x ) + ⎤ ⎥; ⎢ 2 ξ η ξ 2 + η 2 ⎢⎣+ η 3ξ 2 − η 2 sinh ( ξ x ) cos (η x ) ⎥⎦ sinh ( ξ x )sin (η x ) B2 ( x ) = ; 2ξ η 1 B3 ( x ) = [ξ cosh ( ξ x )sin (η x ) − η sinh ( ξ x )cos (η x )] , 2ξ η ξ 2 + η 2 B1 (x ) = ( ( 3 − 3ν 2 1 ) ( ) ) 3 − 3ν 2 1 +ν . hR hR 2k R2 С учетом разбиение оболочечного элемента на зоны назначены следующие граничные условия: здесь ξ= + 1 +ν ; 2k R2 η= ψ u x2 = ( L −δ ) = 0 ; − w x2 = ( L −δ ) = 0 . При переходе через границу двух зон должны быть выполнены условия совместности: ψ u x1 =δ = ψ u x2 = 0 ; Q1 x1 =δ = Q1 x2 =0 ; M1 x1 =δ = M1 x2 = 0 ; w x1 =δ = w x2 = 0 . Окончательно задача сведена к шести трансцендентным определения шести неизвестных δ , C , A0 , A1 , A2 , A3 : уравнениям для C ch(γ δ ) = A0 B0 (0) + A1B1(0) + A2 B2 (0) + A3 B3 (0) ; D C sh (γ δ )γ = D ( A0 B0′ (0) + A1 B1′ (0) + A2 B2′ (0) + A3 B3′ (0) ) ; D C ch (γ δ ) γ 2 = D ( A0 B0′′(0) + A1 B1′′(0) + A2 B 2′′ (0) + A3 B3′′(0) ) ; R2 (D ( A0 B0′′′(0) + A1 B1′′′(0) + A2 B2′′′(0) + A3 B3′′′(0)) + p ) ; w0 = Eh A0 B0 (L − δ ) + A1B1 (L − δ ) + A2 B2 (L − δ ) + A3 B3 (L − δ ) = 0 ; R2 ( D ( A0 B0′′′( L − δ) + A1 B1′′′( L − δ) + A2 B2′′′(L − δ) + A3 B3′′′(L − δ)) + p ) = 0. Eh Для численных расчетов было принято: длина оболочки L=10 мм; радиус R=50 мм; толщина h=0.5 мм; зазор w0 = 0.05 мм; давление герметизируемой среды p=25 МПа; E=200000 МПа; ν=0.3; k=5/6. Эпюра контактного давления, упругие радиальные смещения оболочки и углы поворота показаны на рис.2. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 40 Секция 4 «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ АВТОТРАНСПОРНЫХ СРЕДСТВ». ( ) 3 ( ) 3 ( ) 3 ( ) q ( x 1) 3 w1 x 1 ⋅10 100 w2 x 2 ⋅10 φ 1 x 1 ⋅10 50 φ 2 x 2 ⋅10 0 0 5 10 x 1 , x 2+ δ , x 1 , x 2+ δ , x 1 Рисунок 2 - Эпюра контактного давления, упругие радиальные смещения оболочки и углы поворота Анализ полученных результатов показал, что с изменением начального зазора w0 в сопряжении меняются одновременно с длиной области контакта δ экстремальные значения контактного давления и сама форма эпюры контактного давления, что позволяет уточнить понятие “раскрытие стыка”. Дальнейшее уточнение модели можно получить учитывая обжатие, а также распределение давления герметизируемой среды в области контакта. Литература 1. Биргер, И.А. Стержни, пластины, оболочки. – М.: Физматлит, 1992. – 392 с. 2. Пелех, Б.Л. Обобщенная теория оболочек. – Вища школа, 1978. – 159 с. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 41