КОРИОЛИСОВА СИЛА
реклама

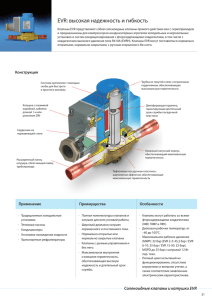
КОРИОЛИСОВА СИЛА И КОРИОЛИСОВО УСКОРЕНИЕ Канарёв Ф.М. E-mail: [email protected] Анонс. Ошибочность первого закона Ньютона повлекла за собой необходимость серьёзной коррекции динамики. Причина этой необходимости одна – нарушение принципа причинности при познании процессов механического движения материальны точек и тел. Покажем это на примере анализа процесса появления кориолисовой силы и кориолисова ускорения. Специалистам по теоретической механике не рекомендуется спешить отрицать важность описанного для понимания сути сложного движения материальной точки, так как голословное отрицание новых научных результатов – следствие мощного гнёта стереотипа научного мышления, который управляет научным поведением почти всех современников новых научных знаний. Это естественный процесс, эквивалентный процессу инстинктивного поведения, управляемого Природой. Ошибочность первого закона Ньютона – следствие нарушения им главного принципа научного познания сути природных явлений и процессов – принципа последовательности. Нарушение этого принципа почти автоматически ведёт к разрыву причинно следственных связей изучаемого явления или процесса. Нельзя начинать анализ какого-либо процесса или явления не найдя его начала. Исторически сложилось так, что развитие кинематики движения материальных точек и тел опережало развитие познания их динамики. В результате знания о скоростях и ускорениях движения материальных точек и тел появились раньше знаний о силах, генерирующих эти скорости и ускорения. Поскольку скорости и ускорения являются следствиями действия сил, то опережающее развитие знаний о скоростях и ускорениях автоматически должно было породить чехарду в отражении физической сути понятий, используемых для описания механических движений материальных точек и тел. Оказалось, что разобраться в этой чехарде и навести порядок в использовании понятий – задача не простая. Началом движения всех материальных точек и тел является ускоренное движение, а равномерное движение всегда, всегда, всегда – следствие ускоренного движения. Мы специально трижды повторили категорическое понятие всегда, чтобы подчеркнуть, что это - закон Природы. Не зная этого закона, нельзя безошибочно описывать механические движения материальных точек и тел. Из этого автоматически следует, что анализ и описание движения материальных точек и тел надо начинать с их ускоренного движения и закон этого движения должен быть первым законом механического движения материальных точек и тел. Из этого также следует давно созревшая необходимость заменить понятие «Динамика» на понятие «Механодинамика». Такая необходимость обусловлена уже давно используемыми родственными понятиями: «Электродинамика», «Гидродинамика», «Аэродинамика», содержащими слово динамика. Чтобы отличить механические движения материальных точек и тел, надо назвать раздел Теоретической механики, описывающий их движение, «Механодинамика». Эта статья адресуется, прежде всего, специалистам теоретической механики и физикам, так как механика – раздел физики. Она базируется на главном принципе познания - последовательности. Физическая суть анализируемого процесса должна подсказывать структуру математических моделей, которые появятся при его описании. Чтобы не плодить бесплодную теоретическую информацию, начнём с анализа конкретного примера. Рассмотрим силы, действующие на ползун, движущийся по стержню, вращающемуся в горизонтальной плоскости (рис. 1). Вполне естественно, что перед равномерным вращением стержень будет иметь фазу ускоренного вращения, и мы не имеем права игнорировать её. 2 Напомним, что вращение стержня называется переносным движением, скорость ползуна в этом движении – переносной скоростью Ve , ускорение – переносным ускорением ae , сила, вращающая ползун, - переносной силой Fe . Движение ползуна вдоль стержня называется относительным движением, скорость – относительной скоростью Vr , ускорение – относительным ускорением ar и сила, движущая ползун вдоль стержня, - относительной силой Fr (рис. 1). Прежде чем приступать к схематическому показу сил, действующих на ползун (рис. 1), обратим внимание на жёсткую связь между вращательным (переносным) движением и линейным (относительным) движением ползуна вдоль стержня. Совокупность этих движений значительно отличается от перемещения, например, пассажира вдоль движущегося трамвая. Пассажир может менять свою относительную скорость Vr произвольно, а ползун лишён такой возможности. Его переносная Ve и относительная Vr скорости связаны друг с другом. Такая же жёсткая связь и у сил, действующих на ползун. Поэтому, составляя схему сил, действующих на ползун, обязательно надо учитывать указанную взаимосвязь между его переносным и относительным движениями (рис. 1). Рис. 1. Схема сил, действующих на ползун М С учётом изложенного, тщательный анализ процесса движения ползуна (рис. 1) показывает, что на него действуют следующие силы: переносная сила F e , вектор которой направлен по нормали к стержню в сторону движения и равен нормальной реакции N стержня на ползун; сила трения F T направлена противоположно движению ползуна относительно стержня и связана с нормальной реакцией N через угол трения T и коэффициент трения f ( FT fN ). Результирующая сила R T силы трения F T и нормальной реакции N образуют угол трения T . Известно, что ползун начнёт ускоренное движение вдоль стержня (вдоль оси îõ ) лишь тогда, когда вектор результирующей силы R T отклонится от нормали N на угол немного больший угла трения T в сторону относительного движения ползуна. Превышение угла отклонения результирующей R T от угла трения T (рис. 1) настолько незначительно, что отклонение результирующей R T от нормали N в момент начала ускоренного 3 движения ползуна можно принимать равным углу трения T . Направление абсолютного ускорения a , совпадает с направлением вектора результирующей силы R T . Вторая составляющая результирующей силы R T , направленная вдоль оси ОХ, является относительной силой Fr . Эта сила генерирует ускорение añ e2 x a r . До нашего анализа считалось, что вектор этого ускорения направлен к центру вращения. Поскольку Fr движущая сила, то вектор ускорения a ñ a r этой силы совпадает с направлением её действия, то есть вектор ускорения a ñ a r в данном конкретном случае направлен от центра вращения, а не к центру, как считалось до сих пор, поэтому у нас есть основания назвать его центробежным ускорением. Обращаем внимание на то, что если ползун будет жёстко связан с вращающимся стержнем, то на него будет действовать связь в виде стержня, которая будет удерживать ползун от перемещения вдоль стержня. В результате координата x относительного перемещения стержня станет постоянной величиной и её в таких случаях называют радиусом. Реакция связи, удерживающая ползун от относительного перемещения вдоль стержня, будет направлена к центру вращения и будет выполнять функции активного воздействия на ползун. Вполне естественно, что ускорение, генерируемое этой связью, также будет направлено к центру вращения и мы обязаны назвать его в этом случае центростремительным ускорением. Вполне естественно, что оно будет равно e2 x . Так как ползун закреплён жёстко, то x r const . Отметим, что до проводимого нами анализа процесса сложного движения точки понятие «центробежное ускорение» отсутствовало. Но, как мы видим, необходимость введения этого понятия существует. Далее, надо учесть существование предельно большой величины силы трения F T соответствующей коэффициенту трения f , который связан с углом трения зависимостью f tgT . При ускоренной фазе вращения стержня с угловым ускорением e результирующая сила достигнет предельно большой величины, определяемой силой трения. Обозначим её через R T (рис. 1). Но как только ползун начнёт движение вдоль стержня, увеличение силы трения F T прекратится, но увеличение результирующей силы, которую мы обозначили символом R T , продолжится за счёт продолжающегося увеличения переносного и относительного ускорений, поэтому результирующую силу, независящую от силы трения, обозначим символом R . А теперь обратим внимание на две причины ускоренного движения ползуна. Первая обусловлена увеличением угловой скорости e от нуля до постоянной величины e const , вторая – увеличением радиуса, равного переменной координате x . Так как в этом случае две переменные e и x , то математическая модель для определения переносного касательного ускорения имеет вид a d (e x) de dx x e e x eVr . dt dt dt (1) Обратим внимание на то, что составляющие полного переносного ускорения (1) имеют одинаковую размерность ðàä. ì / ñ2 и отметим, что математики, физики и механики обычно не пишут размерность радиан, в которой заложен смысл углового перемещения материальной точки. Если размерность радиан опускать, то размерность полного переносного ускорения (1) становится, соответствующей ускорению линейного перемещения материальной точки. Сейчас мы увидим, что нельзя опускать размерность радиан, так как появляется путаница в преставлениях о сути сложного движения материальной точки. 4 Таким образом, из формулы (1) следует, что при ускоренном вращении стержня результирующая касательного (переносного) ускорения ползуна состоит из двух составляющих a a 1 a 2 . Первая составляющая a 1 e x - генерируется переменной уг- ловой скоростью e , а вторая a 2 eVr - переменным радиусом вращения x . Чтобы найти полное относительное ускорение ar ползуна в момент ускоренного вращения стержня, надо также учесть две переменных величины: переносную угловую скорость e и переменный радиус вращения, равный координате x . Переменная угловая скорость e будет генерировать угловое ускорение de / dt e . Кроме этого она будет генерировать и переменное ускорение e2 x ползуна в относительном движении, направленное, в данном случае, от центра вращения. Поэтому, как мы уже отметили, есть основания назвать его центробежным ускорением. Теперь надо учесть ту часть относительного ускорения ползуна, которая генерируется меняющейся координатой x или переменной относительной скоростью Vr . Она равна e Vr . Тогда полное относительное ускорение, при ускоренном вращении стрежня будет равно ðàä.2 ðàä. ì 2 ar e x eVr ì . (2) 2 ñ ñ2 Сразу обращаем некоторую странность. Размерность первой составляющей полного относительного ускорения ðàä.2 ì / ñ2 , а второй ðàä. ì / ñ2 . Из этого следует, что мы не имеем права опускать размерность радиан. В чём суть этого противоречия? Попытаемся поискать его причину. Для этого запишем уравнение изменения угла вращения стержня. e t . (3) При переменном вращении стержня переменная угловая скорость этого вращения определится зависимостью d de (4) t e e t . dt dt Теперь надо задать время от начала ускоренного вращения стержня до момента перехода его к равномерному вращению ( e const ) или угол поворота от начала ускоренного вращения до перехода к равномерному вращению. Примем 2n . Тогда из уравнения (3) имеем 2n t . (5) e При таком определении времени ускоренного вращения стержня переносная угловая скорость e , входящая в выражение (5), является усреднённой постоянной величиной, но тем не менее она отражает время t , затраченное на ускоренное вращение ползуна и мы имеем право использовать математическую модель (5) для описания ускоренного вращения стержня и ускоренного относительного движения ползуна. Подставляя этот результат в формулу (4), имеем ðàä. ðàä. (6) e 2n ðàä. / ñ . ñ2 5 Так будет изменяться угловая скорость e , входящая в формулу ( añ e2 x a r ) для определения ускорения ac относительного движения ползуна вдоль стержня, в фазе ускоренного вращения стержня. Однако надо учёсть и ту часть eVr ускорения, которая возникает в результате увеличения радиуса вращения, то есть – координаты x . В результате математическая модель полного относительного ускорения ползуна añ ar при ускоренном вращении стержня принимает вид aC a r 2x eVr ðàä.2 ì ðàä. ì . 2 ñ ñ2 (7) Как видно, размерности формул (2) и (7) совпадают. Это свидетельствует о правильности определения составляющих полного переносного и полного относительного ускорений движения ползуна при ускоренном вращении стержня. Таким образом, при ускоренном вращении стержня полное переносное (касательное) ускорение (1) и полное относительное ускорение (7) состоят из двух составляющих, учитывающих ускоренное движение ползуна за счёт увеличения переносной угловой скорости e и за счёт увеличения расстояния от центра вращения до ползуна, то есть - координаты x . При равномерном вращении стержня 0 модули обоих ускорений касательного a (1) и переносного ar (7) оказываются одинаковыми и равными eVr . Так как a a r , то абсолютное ускорение ползуна при равномерном вращении стержня определяется зависимостью (8) a a2 ar2 eVr 2 . Из этого следует математическая модель для результирующей активной силы R , действующей на ползун при равномерном вращении стержня. R meVr 2 . (9) При постоянной угловой скорости e const переносное касательное ускорение a также увеличивается по мере удаления ползуна от центра вращения (О) за счёт увеличения радиуса вращения, то есть - координаты x . Действие стержня на ползун передаётся через нормальную реакцию N стержня, которая равна активной переносной силе Fe . Кроме этого, переменная величина Fe формирует переносную силу инерции, направленную противоположно и равную проекции результирующей силы инерции Ri на нормаль. Это – кориолисова сила инерции F . Так как любая сила инерции формирует замедление ik движения тела, совпадающее с направлением самой силы инерции, то кориолисова сила инерции также формирует замедление b переносного движения ползуна, которое совпаk дает по направлению с вектором кориолисовой силы инерции (рис. 1). Модуль кориолисова замедления равен модулю переносного (касательного) ускорения a b eVr . (10) k Обратим внимание на то, что математическая модель бывшего кориолисова ускорения записывается так a 2eVr . (11) k 6 Это в два раза больше замедления (10). Возникает законный вопрос: какая из математических моделей (10) или (11) точнее отражает реальность? Чтобы получить ответ на этот вопрос надо вернуться к принципу причинности, согласно которому сила первична, а ускорение вторично. Поэтому надо составить уравнения сил, действующих на ползун, и из этих уравнений должен следовать ответ на поставленный вопрос. При ускоренном движении материальных точек и тел сила инерции направлена противоположно движению и формирует замедление br этого движения. Активная же центробежная сила F r направлена в сторону движения и совпадает с направлением центробежного ускорения, определяемого по формуле añ e2 x a r . Поскольку в каждый данный момент времени сумма активных сил, сил сопротивления движению и сил инерции, действующих на ползун, равна нулю, то векторное уравнение сил в этом сложном движении ползуна имеет вид R R i F T 0 ma mb f N 0 . (12) Проектируя силы, приложенные к ползуну, на оси ОХ и ОУ, имеем: Fx Fr Fri FT 0 Fx meVr mbr fmeVr ; (13) F y Fe N Fik 0 meVr meVr mbk . (14) Преобразуем уравнение (14) таким образом F y Fe N Fik 0 meVr meVr mbk 2meVr mbk . (15) Итак, сумма проекций сил на ось ОУ, действующих на ползун, состоит из двух составляющих. Первая составляющая 2meVr равна сумме переносной активной силы Fe , действующей на ползун в переносном движении, и равной ей нормальной реакции N стержня на ползун. Это две активные силы, приложенные к ползуну в переносном движении. Обращаем внимание на то, что суммарное переносное ускорение, генерируемое этими силами, равно 2eVr , что полностью совпадает с давно используемым кориолисовым ускорением (11). Далее, направление вектора суммы 2eVr ускорений, генерируемых переносной активной силой Fe и нормальной реакции N стержня на ползун, совпадает с давно принятым направлением вектора, так называемого, кориолисова ускорения (11). Напомним, что в данном случае направление вектора бывшего кориолисова ускорения (11) определяется поворотом вектора относительной скорости V r в сторону вращения. Давно условились силы инерции направлять противоположно ускорениям. На рис. 1 кориолисова сила инерции F направлена противоположно нормальной реакции N , а ik значит и противоположно ускорению 2eVr , которое фактически не является кориолисовым ускорением. Это сумма ускорений, формируемых силами Fe и N . Она не имеет никакого отношения к кориолисовой силе инерции, которая формирует не ускорение движения ползуна, а его замедление b , вектор которого совпадает с направлением коk риолисовой силы инерции F (рис. 1). ik 7 Таким образом, мы оказались в противоречивой ситуации. С одной стороны суммарное ускорение 2eVr генерируется активными силами Fe и N , приложенными к ползуну и направленными в сторону его переносного движения, а с другой стороны сумма этих ускорений 2eVr давно названа кориолисовым ускорением, принадлежащим кориолисовой силе инерции, которая по своей природе генерирует не ускорение, а замедление материальных точек и тел при их ускоренном движении. Из этого следует, что направление действия кориолисовой силы инерции определяется правильно, но модуль его вычисляется неправильно. Произведение массы m ползуна на ускорение его движения 2eVr равно не кориолисовой силе инерции F (рис. 1), а суммарной активной силе ( Fe N ), ik действующей на ползун в переносном движении. Модуль кориолисовой силы инерции F , замедляющей переносное движение ползуна, равен произведению массы m ползуна ik на замедление b , генерируемое кориолисовой силой инерции F mb , направленной k ik k противоположно переносному движению ползуна (рис. 1). Конечно, в изложенном выше, неясна причина сложения ( Fe N ). Но без этого не появляется двойка в выражении (11) кориолисова ускорения. Однако, если представить, что ползун удаляется от центра на удлиняющейся гибкой нити, вращающейся относительно центра, то в такой схеме будет отсутствовать реакция N стержня на ползун и останется одна переносная сила Fe . Этот пример позволяет считать, что при движении ползуна по жёсткому стержню на него действуют в переносном движении две силы ( Fe N ). В этом случае численная величина кориолисова ускорения (11) остаётся прежней. Если же убрать силу Fe , то численная величина кориолисова ускорения будет в два раза меньше и потребуется экспериментальная проверка достоверности новой формулы для вычисления теперь уже не кориолисова ускорения, а кориолисова замедления. ЗАКЛЮЧЕНИЕ Итак, мы выявили все особенности в описании сложного движения ползуна и физическую суть этого движения ввели в рамки причинно-следственных связей. Полученные результаты требуют коррекции кинематики сложного движения материальных точек. Результаты этой коррекции – в следующей статье. ЛИТЕРАТУРА 1.Канарёв Ф.М. Введение в механодинамику. http://kubsau.ru/science/prof.php?kanarev http://www.sciteclibrary.ru/rus/catalog/pages/10044.html 2. Канарёв Ф.М. Механо-физхимия Саяно-Шушенской трагедии. Статья. http://www.sciteclibrary.ru/rus/catalog/pages/10169.html