Уравнения Лагранжа - Томский политехнический университет
реклама

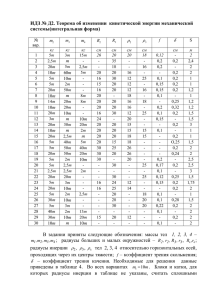
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» М.П. Шумский, Г.А. Симоненко ТЕОРЕТИЧЕСКАЯ МЕХАНИКА. ДИНАМИКА Рекомендовано в качестве методических указаний при выполнении курсовой работы студентами, обучающимися на направлении «Машиностроение». Издательство Томского политехнического университета 2012 ВВЕДЕНИЕ В соответствии с учебным планом студенты по дисциплине «Теоретическая механика» выполняют курсовую работу для закрепления знаний, полученных в теоретическом курсе, и привития практических навыков в инженерных расчетах. При выполнении расчетов по формулам, кроме символов, следует подставить числовые значения параметров, а не писать только конечный результат. Выполненная курсовая работа подлежит защите. При подготовке к защите курсовой работы рекомендуется продумать ответы на вопросы для самоконтроля, содержащиеся в данных методических указаниях. Расчетно-пояснительную записку следует писать в соответствии с ЕСТД на одной стороне листов формата А4 (210 297 мм), снабдив ее обложкой из плотной бумаги. Объем записки 10–15 листов. Графическая часть курсовой работы может выполняться на тех же листах, на которых представлена расчетная часть, или на отдельных листах и располагаться по тексту решаемой задачи. В конце записки приводится список использованной литературы, ссылки на которую даются в тексте записки. Каждый студент выполняет свой вариант задания, содержание которого определяет преподаватель. 2 Уравнения Лагранжа Процесс составления дифференциальных уравнений движения значительно упрощается при использовании уравнений Лагранжа. Преимущества этих уравнений определяются тем, что их вид и их число не зависит ни от количества точек или тел, входящих в механическую систему, ни от характера движения, а определяется лишь числом степеней свободы системы. Уравнения Лагранжа для механических систем с идеальными,удерживающими, голономными связями имеют вид d T T Qi , ( i = 1,..., s.). dt qi qi Здесь q1 ,..., q s ; q1 ,..., q s – обобщённые координаты и обобщённые скорости; s – число степеней свободы системы; T T ( qi , qi , t ) – кинетическая энергия; Qi – обобщённые силы. Уравнения Лагранжа в случае потенциальных сил. Если все силы системы потенциальны, то обобщенные силы выражаются через потенциальную энергию системы как Q j д / дq j , а уравнения Лагранжа запишутся в виде d дT дT д 0 ( j 1, s) . dt дq j дq j дq j Так как потенциальная энергия не зависит от обобщенных скоростей, то д(T ) / дq j дT / дq j . Введем в рассмотрение функцию Лагранжа L T , Тогда уравнения Лагранжа запишутся так: d дL дL 0 ( j 1, s) . dt дq j дq j Последовательность действий при составлении уравнений движения с помощью уравнений Лагранжа: 1) изобразить систему в текущем положении; 2) определить число степеней свободы; 3) выбрать обобщенные координаты, 4) записать в общем виде уравнения Лагранжа для каждой обобщенной координаты; 5) вычислить кинетическую энергию системы в абсолютном движении, выражая ее через обобщенные скорости и обобщенные координаты ; 3 6) согласно уравнениям Лагранжа вычислить частные производные кинетической энергии; 7) изобразить активные силы системы и реакции неидеальных связей; 8) вычислить обобщенные силы по всем обобщенным координатам; 9) подставить частные производные кинетической энергии и обобщенные силы в уравнения Лагранжа, выполнить дифференцирование по времени. В результате получаем дифференциальные уравнения движения данной механической системы. Вопросы для самоконтроля Т 1. Что называется числом степеней свободы системы? 2. Что представляют собой обобщённые координаты? 3. В каком соотношении находятся число степеней свободы голономной системы и число независимых обобщённых координат? 4. Что называется обобщённой силой? 5. От чего зависит размерность обобщённой силы? 6. От чего зависит число уравнений Лагранжа для данной механической системы? 7. Какой вид имеют уравнения Лагранжа? Задача №1. Применение уравнений Лагранжа к исследованию движения механической системы с двумя степенями свободы Механическая система (таблица 1) движется под воздействием постоянных сил и пар сил. Составить дифференциальные уравнения движения системы в обобщённых координатах. Необходимые данные приведены в таблице 2. Там же указаны обобщенные координаты, которые следует использовать при выполнении задания. Считать, что качение колёс происходит без проскальзывания. Колёса, для которых в таблице радиусы инерции не указаны, считать сплошными однородными дисками. Кривошипы рассматривать как тонкие однородные стержни. Принять, что на рисунках 6, 9, 11, 20, 22 и 30 механизм расположен в горизонтальной плоскости. Примечания: 1. Радиусы инерции тел 2 и 3 определены относительно центральной оси, перпендикулярной плоскости чертежа. 2. На рисунке 5 блоки 5 и 6 насажены на общую ось свободно, их массы одинаковы. 4 Схемы механизмов Таблица 1 Рис.1 Рис.2 Рис.3 Рис.4 Рис.5 Рис.6 5 продолжение табл. 1 Рис.7 Рис.8 Рис.9 Рис.10 Рис.11 Рис.12 6 продолжение табл. 1 Рис.13 Рис.14 Рис.15 Рис.16 Рис.17 Рис.18 7 продолжение табл. 1 Рис.19 Рис.20 Рис.21 Рис.22 Рис.23 Рис.24 8 окончание табл. 1 Рис.25 Рис.26 Рис.27 Рис.28 Рис.29 Рис.30 9 Таблица 2 №вар. №рис. m2 6m 3m m3 m m4 m m5 - 2 - - - P, M f qi - - q1 ; q3 - 3 - M - q1 ; q3 1 1 2 2 m1 2m m 3 3 m 3m 2m - - r 2 - M - q1 ; q4 4 4 m 2m 2m 2m - - - f q1 ; q3 5 6 7 8 9 10 11 5 6 7 8 9 10 11 m m 3m m m 2m m 2m 2m 3m 2m 2m 2m 3m 4m 3m m 2m m 2m m 2m 2m m - r 2 2r 4r - - 4 1,5r f f f - q1 ; q2 q1 ; q2 q1 ; q2 q1 ; q2 q1 ; q2 q1 ; q2 q1 ; q3 12 13 14 12 13 14 5m 3m m 2m 2m - - - f f - q1 ; q2 q1 ; q2 q1 ; q3 15 15 2m m 2m 3m - q1 ; q3 16 16 17 2m 3m m 2m m 2m m - M1 , M 2 P1 ; P2 - M1 , M 2 - 2m - - - - 2m m 3m M1 , M 2 P M P; M 2m m - 2r - M3 - q 2 ; q3 17 m 3m 2m 2m - - - - q1 ; q3 18 18 2m 2m - M4 f q1 ; q2 19 2m 2m m m 3m 19 m 3m r 2 - - - - f q1 ; q2 20 21 20 21 2m 2m 3m m 3m 3m 2m m - r 2 - 5 1,5r M1 , M 2 - - q1 ; q2 q1 ; q2 22 23 24 25 26 22 23 24 25 26 m 2m m 2m m 2m 3m 2m m m m 2m m m 2m 3m 3m – 2r - – M1 , M 2 M P1 ; P2 M f f - q1 ; q2 q1 ; q2 q2 ; q4 q1 ; q2 q1 ; q2 27 27 2m 2m 3m m 2m 5 1,5r M - q1 ; q2 28 29 30 28 29 30 m 2m 3m 3m 4m m m 2m m - - - P P f - q1 ; q2 q1 ; q2 q1 ; q2 2m 3m m 3m 2m 10 r 2 r 2 - M1 , M 2 продолжение табл.2 №вар. №рис. P, M f qi M M - q2 ; q4 q2 ; q4 q2 ;q3 - - f q2 ;q3 2r - M1 , M 2 - q1 ; q3 - - - - q1 ; q5 2m - 2m - - - P1 ; P2 - f q3 ; q4 - - - q2 ;q3 m - - - f q3 ; q4 2m m m - 4r 4 1,5r - - - 2m - 2m m - m2 6m 3m 3m m3 m 2m m4 m - m5 - m m 3m m m 2m 4m 2m 3m 2m - 2m - 3m m m 2m 2m 3m 2m m 2m 3m 5m 31 32 33 1 2 3 34 5 35 6 36 7 37 8 38 9 39 10 40 11 41 12 42 13 2m m 43 14 2m m 2m m 44 45 15 16 3m 2m m 3m 2m 2m m 46 18 2m 2m m 47 19 2m 2m 48 20 2m 3m 49 21 2m 2m 50 22 m 3m 51 23 52 24 2m m m 3m 53 54 25 26 2m m 55 27 56 2m 2 3 - m1 2m m m r 2 - M1 , M 2 - f q1 ; q2 q1 ; q3 - M1 , M 2 P - - q3 ; q4 - - M - q2 ;q3 - 2r - P; M - q2 ; q4 q1 ; q3 m 3m - - M4 f q3 ; q4 3m m - - - f q3 ; q4 m 3m 3m - - r 2 - - q2 ;q3 2m m - 5 1,5r M1 , M 2 - - q3 ; q4 2m m m m - - - - q2 ;q3 3m - - M1 , M 2 - f q2 ;q3 m 2m - 2r - M - q1 ; q3 2m 3m m 2m 3m – - – P1 ; P2 M f - q1 ; q4 q3 ; q4 2m 2m 3m m 2m 5 1,5r M - q3 ; q4 28 m 3m - - - P - q3 ; q4 57 29 4m - - P f q2 ;q3 30 - - - q1 ; q3 1 2m 6m - - - M1 , M 2 - - 59 2m m m m - 58 2m 3m m m r 2 - - q3 ; q4 60 2 m 3m - - - - - M - q2 ;q3 61 3 m 3m 2m - - r 2 - M4 - q2 ; q4 3m 2m 11 r 2 M3 окончание табл.2 №вар. №рис. m5 2m 2 3m m4 2m - - 2r m m - - 2m 2m 2m - - 3 - 4r 4 1,5r - m1 m m2 2m m3 4m 2m 3m P, M f qi - f q5 ; q6 M1 , M 2 - q2 ;q3 P1 ; P2 - - q3 ; q4 f q1 ; q3 - q1 ; q3 f q2 ;q3 - q2 ;q3 - M1 , M 2 M P; M - q1 ; q4 q2 ;q3 2r - M3 - q2 ; q4 62 5 63 6 64 7 65 8 m 3m m 66 9 m 2m 3m 2m - 67 10 - 11 2m 3m m 68 2m m m 69 70 14 15 2m 3m 2m - 71 16 2m m m 3m 2m m 2m 2m m m - 72 18 2m 2m m m 3m - - M4 f q1 ; q3 73 19 2m 2m 3m m - - - f q2 ; q4 74 20 2m 3m 3m - - q1 ; q3 21 2m 2m 2m m - 5 1,5r M1 , M 2 - - 75 m 3m r 2 - - q2 ; q4 76 22 m 3m - - - q1 ; q3 23 2m m 3m - - M1 , M 2 - - 77 f q3 ; q4 78 25 - - q2 ;q3 2m – r 2 – P1 ; P2 M f 26 2m 3m - 79 2m m m m 3m - q2 ;q3 80 27 2m 2m 3m m 2m 5 1,5r M - q1 ; q3 81 82 28 4 m m 3m 2m m 2m 2m - r 2 - - P - f q2 ; q4 q2 ; q4 83 17 m 3m 2m 2m - - - - q2 ; q4 84 12 2m 4m m m - r 2 - - P f q2 ;q3 85 13 m 3m - - - - q1 ; q3 17 m 3m 2m 2m - 86 2m 2m - - - - q1 ; q4 87 24 m 3m m 2m - r 2 2r - M - q1 ; q4 2m m m - - r 2 M1 , M 2 - Пример выполнения задания .Дано: массы тел механической системы m1 3m ; m2 8m; m4 m6 2m; m5 4m ; M 3m g r – постоянный момент; b m – коэффициент пропорциональности в выражении силы R bV5 сопротивления движению тела 5 ( V5 – скорость тела 5); r – радиус однородных дисков 4, 6 и 2.. Составить дифференциальные уравнения движения системы в обобщённых координатах q1 x1, q2 x2 . На рисунке система изображена в движении. 12 Рис.1 Решение. Для решения задачи применим уравнения Лагранжа II рода: d T T Q1 ; dt x1 x1 (1) d T T Q2 . dt x2 x2 (2) Здесь Т – кинетическая энергия системы; Q1 и Q2 – обобщённые силы. Для данной системы (3) T Тi . Выразим абсолютные скорости центров масс твёрдых тел системы через обобщённые скорости: V1 V5 x1 , (4) V2 x1 x2 . x1 – переносная скорость при движении вместе Здесь учтено, что для тела 2 с нитью, x2 – относительная скорость. Угловые скорости тел (рис.1) x1 ; r x 2 2 . r 4 6 (5) Моменты инерции блоков относительно центральных осей J4 J6 2m r 2 mr 2 . 2 Момент инерции цилиндра 2 относительно центральной оси 8m r 2 J2 4m r 2 . 2 m1V12 3 Кинетическая энергия тел: T1 m x12 ; 2 2 m2V22 J 2 22 2 T2 4m x1 x2 2m x22 ; 2 2 J 4 42 m x12 m V2 T4 ; T5 5 5 2m x12 ; 2 2 2 13 T6 J 6 62 1 2 m x1 . 2 2 Подставляя эти величины в (3), получим 9 2 T m x12 2 m x22 4 m x1 x2 . 2 (6) Для вычисления обобщённой силы Q1 зададим системе виртуальное движение x1 0; x2 0 и подсчитаем мощность сил N1 m1 g x1 R x1 M 6 m2 g x1 , или N1 3mg b x1 M M 8mg x1 5m g b x1 x1 . r r Обобщённая сила Q1 равна коэффициенту при x1 в выражении мощности N1 : M Q1 5mg bx1 . (7) r Для вычисления обобщённой силы Q2 зададим системе виртуальное движение x1 0; x2 0 и подсчитаем мощность сил N2 m2 g x2 8mg x2 . Обобщённая сила Q2 равна коэффициенту при x2 в выражении мощности N 2 : . Q2 8m g . (8) Найдем значения слагаемых уравнений Лагранжа T 9m x1 8mx1 x2 17m x1 8m x2 ; x1 (9) T 4m x2 8m x1 x2 12m x2 8m x1 ; x2 (10) T T 0; 0; x1 x2 (11) d T 17m x1 8m x2 d t x1 (12) d T 12m x2 8m x1 dt x2 (13) Подставляя в (1) и (2) выражения (7 – 13) и значения М и b, получим дифференциальные уравнения движения системы: 17 x1 8x2 x1 8 g , 8x1 12 x2 8 g. (14) 14 Теорема об изменении кинетической энергии 1. Работа и мощность силы Элементарная работа силы d A F d r F dS F dS cos , где F – проекция силы на направление перемещения точки приложения силы; – угол между направлениями силы и перемещения. Работа переменной силы на конечном перемещении A F dS F cos dS . S S Элементарная работа пары сил (момента) d A M Z d , где MZ – проекция момента пары сил на ось вращения; d – положительное приращение угла поворота тела. Работа пары сил на конечном повороте тела A M Z d . 0 Работа пары сил с постоянным моментом MZ = const A M Z , где – угол поворота тела в положительном направлении. Мощность силы N F V F V cos , где – угол между направлениями силы и скорости точки приложения силы. Мощность пары сил (момента) N M Z Z , где Z – проекция угловой скорости на ось вращения. 2. Кинетическая и потенциальная энергия Кинетической энергией материальной точки называется скалярная 2 величина, равная mV / 2 . Кинетической энергией механической системы называется сумма кинетических энергий всех ее материальных точек: mkVk2 Т . 2 Кинетическая энергия при вращательном движении тела 15 1 T J z 2 , 2 где J z – момент инерции тела относительно оси вращения; – угловая скорость тела. Кинетическая энергия при плоском движении тела 1 1 T mVC2 J zc 2 , 2 2 Где m – масса тела; VC – скорость центра масс; J zc – момент инерции относительно оси, проходящей через центр масс перпендикулярно плоскости движения; – угловая скорость тела. Область пространства, в которой на помещенную туда точку действует сила, не зависящая от времени, называется стационарным силовым полем. Стационарное силовое поле называется потенциальным, если существует такая функция координат П x, y, z , называемая потенциальной энергией, что проекции силы могут быть представлены через нее следующим образом: Fx П П П . , Fy , Fz x y z Потенциальная энергия определяется с точностью до постоянного слагаемого. Потенциальная энергия равна работе потенциальной силы при переходе из текущего положения M в начальное положение M 0 , в котором она равна нулю ( F ) A( F ) . Потенциальная энергия тяжелого тела в поле силы тяжести в случае, когда ось Oz направлена вверх П = mgz, где m – масса; g – ускорение свободного падения; z – координата центра тяжести. Потенциальная энергия пружины П c 2 . 2 Здесь с – жёсткость пружины; – удлинение (укорочение); П = 0 при недеформированном положении пружины. . Если в потенциальном силовом поле движется система материальных точек, то потенциальная энергия этой системы равна сумме потенциальных энергий всех точек системы, то есть i (xi , yi , zi ) . Следовательно, работа потенциальных сил системы A A(Fi ) 0 (Fi ) (Fi ) 0 . 16 Работа силы по любому замкнутому контуру в потенциальном силовом поле равна нулю. 3. Теорема об изменении кинетической энергии Теорема об изменении кинетической энергии в интегральной форме: изменение кинетической энергии механической системы при ее переходе из начального положения в текущее положение равно сумме работ внешних и внутренних сил системы, совершенных при этом переходе. T T0 Ake Aki , где Ake и Aki – суммы работ внешних и внутренних сил; T0 – начальная кинетическая энергия системы. Теорема об изменении кинетической энергии механической системы в дифференциальной форме: производная по времени кинетической энергии системы равна сумме мощностей внутренних и внешних сил системы. dT N ke N ki , dt где N ke и N ki – суммы мощностей внешних и внутренних сил. Теорема в дифференциальной форме удобна для составления дифференциальных уравнений движения. При практическом применении теоремы нужно помнить о том, что кинетическую энергию следует вычислять в абсолютном движении. В частном случае, когда все внешние и внутренние силы системы потенциальны, имеет место закон сохранения полной механической энергии: если все внешние и внутренние силы механической системы являются потенциальными, то полная механическая энергия системы в процессе движения остается постоянной величиной, равной своему начальному значению. T T0 0 , или T h , где h - постоянная, равная начальному значению T0 0 полной механической энергии системы материальных точек. Механические системы, в которых выполняется закон сохранения полной механической энергии, называются консервативными. Консервативными называются в этом случае и силы системы и потенциальное силовое поле, где происходит движение системы. 17 Вопросы для самоконтроля 1. Что называется кинетической энергией механической системы? 2. Запишите формулы для вычисления кинетической энергии твердого тела при поступательном, вращательном и плоскопараллельном движении. 3. Что называется элементарной работой силы F на бесконечно малом перемещении d r ? 4.Как вычисляется работа переменной силы на конечном перемещении по траектории? 5. Как вычисляется работа силы тяжести? 6. Как вычисляется работа момента силы? 7.Какое силовое поле называется потенциальным? 8. Что называется потенциальной энергией? 9.Как связана потенциальная энергия с работой потенциальной силы? 10. Сформулируйте теорему об изменении кинетической энергии механической системы. 11. Сформулируйте закон сохранения полной механической энергии. 12. Как вычисляется мощность силы и момента? Задача №2. Теорема об изменении кинетической энергии механической системы(интегральная форма) Механическая система под действием сил тяжести приходит в движение из состояния покоя; начальное положение системы показано на схемах в таблице 3. Учитывая трение скольжения тела 1 (варианты 1–3, 5-8, 10-12, 14, 19–23, 25-28, 30) и сопротивление качению тела 3, катящегося без скольжения (варианты 2, 4-7, 9–11, 13, 15–18, 20, 22–24, 26, 27, 29), определить скорость тела 1 в тот момент, когда пройденный им путь станет равным s. 18 Схемы механизмов .Таблица 3 задание №1 задание №2 задание №3 задание №4 задание №5 задание №6 задание №7 задание №8 19 продолжение табл.3 задание №9 задание №10 задание №11 задание №12 задание №13 задание №14 задание №15 задание №16 20 продолжение табл.3 задание №17 задание №18 задание №19 задание №20 задание №21 задание №22 задание №23 задание №24 21 окончание табл.3 задание №25 задание №26 задание №27 задание №28 задание №29 задание №30 22 Таблица 4 № вар. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 m2 m3 m4 R2 R3 2 3 f S кг 5m 2,5m 20m 10m 5m 5m 20m 10m 14 m 10m 20m 3m 20m 10m 20m 5m 5m 20m 5m 5m 2,5m 20m 5m 20m 5m 30 m 5m 40m 30 m 10m кг 3m m 5m 60m 10m 2m 50 m m 20m 20m 10m m 30 m m 2,5m 40m 50 m 50 m 2m 2,5m 2,5m 20m 3m 10m 2m 10m 3m 2m 10m m кг 15m 2,5m 5m 8m 8m 10m 20m 2m m 5m 40m 20m 10m 2m 2,5m 13m 20m 10m см 26 20 16 15 16 20 20 20 16 24 20 20 20 20 30 30 30 16 16 15 - см 20 35 18 20 30 20 20 20 20 30 20 20 20 15 25 20 30 30 24 25 20 28 30 20 - см 20 16 12 12 12 18 16 16 12 20 15 15 18 18 26 26 20 12 14 12 - см 18 16 25 16 18 25 15 15 25 25 18 20 20 - 0,12 0,2 0,2 0,1 0,15 0,15 0,1 0,2 0,1 0,15 0,1 0,2 0,17 0,1 0,12 0,15 0,1 0,1 0,22 0,1 0,1 см 0,2 0,2 0,2 0,2 0,2 0,25 0,32 0,2 0,2 0,2 O,25 0,2 0,24 0,2 0,25 0,2 0,2 0,28 0,2 0,2 - м 2 2,4 2 2 1 1 1,2 1 1,2 1,2 1,5 1,5 3 1 1 1,5 2 2 2,5 2,5 3 1,5 1,75 2 1 1,5 2 2 2 2 В задании приняты следующие обозначения: массы тел 1, 2, 3, 4 – m1 ,m2 ,m3 ,m4 ; радиусы больших и малых окружностей – R2 , r2 , R3 , r3 , R4 ,r4 ; радиусы инерции 2 , 3 , 4 тел 2, 3, 4 относительно горизонтальных осей, проходящих через их центры тяжести; f – коэффициент трения скольжения; – коэффициент трения качения. Необходимые для решения данные приведены в таблице 4. Во всех вариантах m1 10m . Блоки и катки, для которых радиусы инерции в таблице не указаны, считать сплошными однородными цилиндрами. В варианте 17 тележка 4 на четырёх одинаковых 23 колёсах 3 . Наклонные участки нитей параллельны соответствующим наклонным плоскостям. Пример выполнения задания. Дано (Рис. 2, а): m1 – масса груза 1, m2 2 m1, m3 m1, m4 0,5m1 , m5 20m1 , R2 R3 12 см, r2 0,5R2 , r3 0,75R3 , R5 20 см , AB l 4 R3 , 2 8 см, 3 10 см, 30 , f 0,1, = 0,2 см, s = 0,06 м. Сопротивление качению тела 2 не учитывать. Шатун 4 считать тонким однородным стержнем; каток 5 – однородный сплошной цилиндр. Массами звена BC 5 и ползуна В пренебречь. На рисунке 2, а) показана механическая система в начальном положении. Рис. 2 Найти: V1 – скорость груза 1 в конечном положении. Решение. Применим теорему об изменении кинетической энергии системы: T T0 Ake Aki , (1) где T0 и T – кинетическая энергия системы в начальном и конечном положениях; Aki Ake – сумма работ внешних сил, приложенных к системе; – сумма работ внутренних сил системы. 24 Для систем, состоящих из абсолютно твёрдых тел, соединённых нерастяжимыми нитями, Aki = 0. Так как в начальном положении система находится в покое, то T0 0 . Уравнение (1) принимает вид: T Ake . (2) Кинетическая энергия T системы в конечном её положении (рис. 2, б) равна сумме кинетических энергий тел 1, 2, 3, 4, 5: T =T1 T2 T3 T4 T5 . (3) Кинетическая энергия груза 1 T1 m1 V12 2 (4) . Кинетическая энергия катка 2, совершающего плоское движение, T2 2 m 2 V С2 J 2 2 2, 2 2 (5) где VC2 – скорость центра тяжести C 2 катка 2 VC2 V1 , (6) J 2 – момент инерции катка 2 относительно его центральной оси C2 J 2 m2 22 , (7) 2 – угловая скорость катка 2. Так как каток катится без скольжения, то мгновенный центр скоростей катка находится в точке Р2. Поэтому 2 VC2 V 1 . C2 P2 R2 (8) Подставляя (6) – (8) в формулу (5), получаем m2 22 V12 m2 V12 1 T2 m2 2 2 2R22 2 2 1 22 V1 . (9) R2 Кинетическая энергия звена 3, вращающегося вокруг неподвижной оси Ох, J 3x 32 , T3 2 (10) где J 3x – момент инерции звена 3 относительно оси Ох: 25 2 , J 3x m3 3x (11) 3 – угловая скорость звена 3: 3 VE . r3 (12) Скорость точки E звена 3 равна скорости точки D катка, которую можно найти из соотношения: (r 2 R 2 ) VD ; VC 2 R2 а так как 3 VD 3 , VE VD V1 . 2 V1 2 то VC 2 V1 , R2 2 r 2 , (13) Подставляя (13) в (12), получаем 3 3 V1 . 2 r3 (14) После подстановки (11) и (14) в (10) выражение кинетической энергии звена 3 принимает вид: 2 m3 32x 3V1 T3 , или 2r3 2 T3 2 V 2 9 m3 3x 1 . 8 r 32 (15) Кинетическая энергия шатуна 4 , совершающего плоское движение, T4 1 1 2 m4 V C J 4 42 , 4 2 2 где VC 4 – скорость центра тяжести C 4 шатуна 4, J 4 – момент инерции шатуна относительно центральной оси C4 , 4 – угловая скорость шатуна 4. Для определения скорости VC 4 и угловой скорости 4 найдём конечное положение шатуна 4. Когда груз 1 пройдёт путь s 0, 06 (м), барабан 3 повернётся на угол 3 . Этот угол можно определить на основании формулы (14), заменяя в ней 3 d 3 ds , V1 , dt dt получаем d3 3 ds , или d 3 3 ds ; dt 2r3 dt 2 r3 после интегрирования (при нулевых начальных условиях) 3 3 s . 2 r3 26 Видно, что линейные и угловые перемещения находятся в такой же зависимости, как соответствующие линейные и угловые скорости. Вычислим угол 3 0, 06 2 0, 09 3 радиан . Значит, барабан 3 повернётся на 180 ; при этом шатун 4 из начального положения A0 B0 перейдёт в конечное положение АВ (рис. 2, б). Так как скорости точек А и В шатуна в этот момент параллельны, мгновенный центр скоростей шатуна находится в бесконечности. Угловая скорость шатуна 4 = 0, а скорости всех его точек равны между собой. Кинетическая энергия шатуна 4 T4 где 2 m4 V C 4 , 2 (16) VC 4 VA . (17) Скорость точки А звена 3 VA 3 R 3 (18) или с учётом (14) VA Поскольку r 3 С учётом (17) 3 R3 V 1 . 2 r3 3 R 3 , получим VA 2 V1 . 4 VC 4 2 V1 . (19) После подстановки (19) в (16) выражение кинетической энергии шатуна 4 принимает вид: T4 1 m 4 (2V 1) 2 2 m 4 V 12 . 2 (20) Кинетическая энергия катка 5 T5 1 1 2 m5 V C J 5 52 , 5 2 2 где V C 5 – скорость центра тяжести C5 катка 5; J 5 – момент инерции катка 5 (однородного сплошного цилиндра) относительно его центральной оси C5 ; 1 J 5 m 5 R 52 , 5 – угловая скорость катка 5. 2 Так как каток катится без скольжения, то мгновенный центр скоростей находится в точке P 5 (рис. 2, б), поэтому 27 5 VC 5 , R5 T5 2 1 1 m 5 R 52 V C 2 5 3 m V2 . m5 V C 5 5 C5 2 2 2 4 2 R5 Так как звено BC 5 совершает поступательное движение, то VC5 VB ; но VB VC 4 2V 1 , т.е., VC 5 2 V 1 . Кинетическая энергия катка 5 принимает вид: T5 3 m 5 (2 V 1) 2 3 m 5 V12 . 4 (21) По формуле (3) с учётом (4), (9), (15), (20), (21): m1 V 12 T 2 1 m2 2 22 2 9 32x 1 2 V 1 m 3 2 V 12 2 m 4 V 12 3 m 5 V 12 . R 8 r3 2 Подставляя сюда заданные значения масс и радиусов, получаем m1V 12 . T 129 2 (22) Найдём сумму работ всех внешних сил, приложенных к системе, на заданном её перемещении. Покажем внешние силы (рис. 2, в). Работа силы тяжести G 1 : AG1 G1 h1 m1 g s sin . (23) Работа силы трения скольжения F ТР. : A FТР. F ТР. s . Так как F ТР. f N 1 f G1 cos , то A F ТР. f m1 g s cos . Работа силы тяжести G 2 : AG 2 G 2 h C 2 m 2 g s sin . (24) (25) Работа сил сцепления F сц 2, F сц5 катков 2 и 5 равна нулю, так как эти силы приложены в мгновенных центрах скоростей катков. Работа силы тяжести G 4 : AG 4 G 4 h C 4 , где h C 4 – вертикальное перемещение центра тяжести C 4 шатуна 4 из начального положения в его конечное положение (рис. 2, г): h C 4 R 3 ; AG 4 m 4 g R 3 . (26) Работа пары сил сопротивления качению катка 5: A M C M C 5 , (27) где M C N 5 G 5 – момент пары сил сопротивления качению катка 5, 5 – угол поворота катка 5. Так как каток 5 катится без скольжения, то угол его поворота 5 SC 5 R5 , где SC – перемещение центра тяжести катка 5. Работу пары сил сопротивления качению вычислим, как сумму работ этой пары при качении катка 5 влево при повороте тела 3 на угол / 2 и качении вправо, когда тело 3 повернётся ещё на угол / 2 . Путь, 5 28 пройденный центром тяжести C 5 катка 5 равен сумме перемещений ползуна В влево и вправо: SC 2 Bo B . (29) Определим перемещение B0 B при повороте тела 3 на угол / 2 . За начало отсчёта координаты точки В выберем неподвижную точку К плоскости (рис. 2, г). При этом повороте тела 3 шатун из положения A0 B0 перейдёт в положение K B . Тогда B 0 B K B 0 K B , 5 где K B 0 K O O B 0 R 3 A 0 B 0 2 A 0O 2 R 3 l 2 R 32 , K B A B l 4 R 3 . Следовательно, B0 B R 3 l 2 R 32 l R 3 4 R3 2 R 32 4 R 3 0,88 R 3 , (30) Подставляя (30) в (29), а затем в (28), находим полный угловой путь катка 5: 5 1, 76 R3 . R5 (31) Работа пары сил сопротивления качению по (27): A M C m 5 g 1, 76 R3 . R5 (32) Сумма работ внешних сил определится сложением работ, вычисляемых по формулам (23) – (26) и (32): R Ake m1gs sin f m1g s cos m2 gs sin m4 gR3 m5 g 1,76 R3 5 Подставляя заданные значения масс, получаем R3 20 1,76R3 e , A m g s sin f cos 2 sin k 1 2 s R s 5 или Ake 1,51m1 g s . Приравняем значения T (33): 129 V1 (33) и Ake , определяемые по формулам (22) и m1 V12 1,51 m1 g s , откуда 2 2 1,51 g s 3,02 9,81 0,06 0,2 м / с . 129 129 29 Задача №3. Теорема об изменении кинетической энергии механической системы(дифференциальная форма) Для заданной механической системы определить ускорения грузов и натяжения нитей, к которым прикреплены грузы. Система движется из состояния покоя. Варианты механических систем представлены в таблице 6, а необходимые для решения данные приведены в таблице 5. Во всех вариантах m1 2m, m 10 кг . Блоки и катки, для которых радиусы инерции в таблице не указаны, считать сплошными однородными цилиндрами. . Радиусы инерции вычислены относительно центральных осей. Коэффициент трения принимать одинаковым как при скольжении тела по плоскости, так и при торможении колодкой (варианты 9; 11). Пример выполнения задания. Дано: m1 m2 2m, m3 m4 m , R 2r , 2 r 2 , f 0,2. Блок 3 - однородный цилиндр (рис. 3). Определить ускорения грузов и натяжения ветвей нити 1-2 и 3-4. 2 2 1 1 V1 FТ 2 b Rn 60 60O O V1 G1 V1 2 3 4 G2 V3 G3 3 3 V4 4 G4 Рис. 3 Рис. 4 Решение. Применим к решению задачи теорему об изменении кинетической энергии в дифференциальной форме dT N . dt 30 Таблица 5 1 m 3m – 2 r 2 – – 2 m m – 2 r 2 – – 3 m m – 2 r 2 – 0,1 4 m 4m – – – – 0,2 5 m m m 3 – – 6 m – 3 – 0,2 7 m – 3 – 0,2 8 m – 3 – 0,2 9 m – 3 – 0,2 10 2m 2m 2m 2m 2m m 2r 2r 2r 2r 2r – 4 – – 0,4 11 2m 0,2m 3 2r – 0,2 12 m m 2m 0,2m 3 2r – 0,2 13 2m 2m – r2 2 2r3 – r2 2r3 ; R2 R3 14 2m m m 4m – r2 2 2r3 – r2 2r3 ; R3 1,5R2 15 2m 2m – r2 2 2r3 – r2 2r3 ; R3 1,5R2 2m 4m – r2 2 2r3 – r2 2r3 ; R3 1,5R2 17 m m m m – 2 r 2 – 0,1 18 0,2m 0,1m 0,3m 2 – – 0,4 19 0,3m 0,2m 6m 3 2r 1,2 r 0,1 r3 1,2r; R3 1,2r3 20 0,2m 0,1m 6m 2 1,6 r r 2 0,2 r2 1,5r; R2 1,2r2 21 4m 0,2m – 3 – r 2 – 22 0,4m 0,6m – 2 – r 2 – 23 0,4m 0,2m – 1,5 1,2 r – – 24 m m 8m – – – – 25 m 2m m – – – – R3 R4 26 2m 2m – – – – – R2 R3 27 2m 2m 8m 2 r 2 r 2 – 28 – 2 r 2 – 0,1 29 m m m m 2 – r 2 – 30 m m 6m – – – 0,1 16 31 R2 R3 R3 1,2r Массы четырех колес одинаковы 4 3 Схемы механизмов Таблица 6 задание №1 задание №2 задание №3 задание №4 задание №5 задание №6 задание №7 задание №8 32 задание №9 продолжение табл.6 задание №10 задание №11 задание №12 задание №13 задание №14 задание №15 задание №16 33 задание №17 продолжение табл.6 задание №18 задание №19 задание №20 задание №21 задание №22 задание №23 задание №24 34 задание №25 окончание табл.6 задание №26 задание №27 задание №28 задание №29 задание №30 Целесообразно определить истинное направление движения системы, чтобы правильно показать направление сил трения. В рассматриваемом примере груз 1 опускается. Покажем активные силы: силы тяжести G1, G2 , G3 , G4 , а также составляющие реакции плоскости Rn и FT (Рис. 4). Сила трения FT fRn fG1 cos60o f G. 35 Покажем линейные и угловые скорости и составим уравнения связей.Мгновенный центр скоростей блока 3 находится на одной вертикали с центром блока 2. Расстояние между МЦС и центром блока 3 3 r V V V b r r . Находим 2 3 1 1 , V3 V4 3b 1 . 2 2 R 2r 4 Кинетическая энергия системы равна сумме кинетических энергий звеньев механизма: T T1 T2 T3 T4 . 1 2 1 2 Грузы 1 и 4 движутся поступательно, T1 m1V12 mV12 ; T4 m4V42 1 mV12 . 32 1 2 Блок 2 вращается вокруг неподвижной оси, T2 J 222 , момент инерции 1 2 блока J 2 m2 22 ; T2 mV12 . Блок 3 совершает плоское движение, 1 1 1 9 11 m3V32 J 332 , J 3 m3 R32 m r 2 ; T3 m V12 . 2 2 2 8 64 1 3 1 109 m V12 . Кинетическая энергия системы T mV12 mV12 mV12 mV12 ; T 2 64 32 64 Определим мощность сил, действующих на систему. Мощность силы G2 , T3 приложенной в неподвижной точке, и мощность реакций идеальных связей равна нулю. Мощность остальных сил N G1 sin 60o V1 FT V1 G3 V3 G4 V4 . Учитывая значение силы FT , уравнения связей и исходные данные, находим N 1,03mgV1 . dT 109 dT mV1 a1 , значения и N dt 32 dt 109 м mV1 a1 1,03m gV1 , находим a1 2,97 2 . подставляем в уравнение теоремы 32 с Дифференцируя по времени уравнение связи V4 V1 4 , находим: м a4 a1 4 ; a4 0,74 2 . с Вычисляем производную Для определения натяжения нити на участке 1 – 2 мысленно рассечем нить и заменим ее действие на груз 1 реакцией S1 2 (Рис.5). Применим теорему об изменении кинетической энергии в дифференциальной форме: dT1 N1 . Кинетическая энергия найдена ранее: T1 mV12 . Мощность сил dt N1 G1sin 60o V1 FT V1 S12 V1 . Получим: 2mV1 a1 G1sin 60o FT S1 2 V1 , откуда S1 2 G1sin 60 FT 2ma1 ; o S12 0,93G . 36 S1 2 1 S3 4 FT V1 G1 Rn 60 V4 4 G4 o Рис.5 Рис.6 Для определения усилия на участке 3 – 4 мысленно выполняем рассечение и 1 mV12 . Мощность 32 1 V mV1 a 1 S3 4 G4 1 . сил N S3 4 V4 G4 V4 . Применяем теорему: 16 4 1 S3 4 1,08G . Находим S3 4 ma1 G ; 4 вводим реакцию S3 4 (Рис.6). Кинетическая энергия T4 37 ЛИТЕРАТУРА 1. Тарг С.М. Краткий курс теоретической механики: Учеб. для втузов. – 11-е изд., испр. – М.: Высш. шк., 1995. С.301-320, 376-379. 2. Яблонский А.А. и др.Сборник заданий для курсовых работ по теоретической механике. – 4-е изд. – М.: Высш. шк.,1985. С.197-202, 292-300. 38 Учебное издание ШУМСКИЙ МИХАИЛ ПЕТРОВИЧ СИМОНЕНКО ГАЛИНА АЛЕКСЕЕВНА ТЕОРЕТИЧЕСКАЯ МЕХАНИКА. ДИНАМИКА Задачи и методические указания к выполнению курсовой работы по дисциплине «Теоретическая механика. Динамика» для студентов 2-го курса. Научный редактор Редактор Верстка Дизайн обложки 39 40