- Томский Государственный Архитектурно
реклама

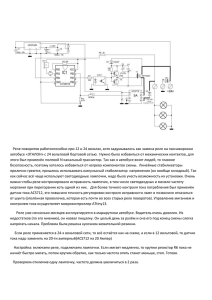
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Томский государственный архитектурно-строительный университет» МНОГОКАНАЛЬНАЯ СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ-ТЕЛЕСИГНАЛИЗАЦИИ (ТУ-ТС) Методические указания к лабораторной работе № 1 Составители: Э.С. Астапенко А.Н. Деренок Томск 2012 Многоканальная система телеуправления-телесигнализации (ТУ-ТС): методические указания / Сост. Э.С. Астапенко, А.Н. Деренок. – Томск: Изд-во Том. гос. архит.-строит. ун-та, 2012. – 15 с. Рецензент доцент Ю.А. Орлов Редактор Е.Ю.Глотова Методические указания к лабораторной работе по дисциплине СД.Ф.17 «Автоматизация и управление процессами теплогазоснабжения и вентиляции» для студентов специальности 270109 «Теплоснабжение и вентиляция», по дисциплине СД.Ф.1 «Автоматика и автоматизация производственных процессов» для студентов специальности 150405 «Машины и оборудование лесного комплекса, по дисциплине ДС.5 «Автоматика и робототехника» для студентов специальности 190205 «Подъемно-транспортные, строительные, дорожные машины и оборудование», по дисциплине СД.04 «Основы автоматизации и робототехника» для студентов специальности 270113 «Механизация и автоматизация строительства» всех форм обучения и для подготовки бакалавров соответствующих профилей. Печатаются по решению методического семинара кафедры электротехники и автоматики № 7 от 10.02.11 г. Утверждены и введены в действие проректором по учебной работе В.В. Дзюбо с 01.02.12 до 01.02.17 Оригинал макет подготовлен авторами. Подписано в печать Формат 60×84. Бумага офсет. Гарнитура Таймс. Уч.-изд. л. 0,8 . Тираж 130 экз. Заказ №10 Изд-во ТГАСУ, 644003, г. Томск, пл. Соляная, 2. Отпечатано с оригинал-макета в ООП ТГАСУ. 634003, г. Томск, ул. Партизанская, 15. 2 МНОГОКАНАЛЬНАЯ СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ-ТЕЛЕСИГНАЛИЗАЦИИ (ТУ-ТС) 1. ЦЕЛЬ РАБОТЫ Целью лабораторной работы является изучение принципов построения систем телеуправления и телесигнализации с линейным разделением одноэлементных сигналов на примере системы ТУ-ТС с амплитудно-полярными признаками. 2. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ При автоматическом управлении и контроле пункт управления или диспетчерский пункт (ДП), где находится оператор, часто расположен в отдалении от контролируемого пункта (КП), где сосредоточены объекты управления. Соединение ДП с КП не вызывает затруднений, пока расстояние между ними не превышает нескольких десятков или сотен метров. При таких расстояниях можно выделить необходимое число проводов и обеспечить их малое сопротивление. Если ДП и КП удалены друг от друга на расстояние нескольких километров (иногда десятков и сотен), то возникают следующие проблемы: – возрастает стоимость линий связи; – параметры линии связи зависят от климатических условий (температуры, осадков и т. п.). В этих случаях применяют телемеханические системы. Это комплекс технических средств для передачи на расстояние по линиям связи команд к объектам управления, а также контрольной информации в обратном направлении. Таким образом, система телемеханики решает задачи телеуправления (ТУ) и телесигнализации (ТС). Телеуправление – это передача на расстояние команд 3 и преобразование их в управляющее воздействие на объект управления. Телесигнализация – это передача дискретной информации о состоянии объекта управления (открыто – закрыто, включено – отключено, вверху – внизу и т. п.). Телемеханические системы применяются в следующих случаях: – когда необходимо объединить территориально разобщенные объекты управления (нефте- и газопроводы, энергосистемы, железнодорожные узлы, системы газо- и водоснабжения и т. п.); – когда присутствие человека на объекте нежелательно (атомная и химическая промышленность); – недоступность объекта управления для человека (непилотируемые ракета и самолет, луноход и т. п.). Для передачи телемеханической информации используют выделенные для этого линии связи: проводные и кабельные линии, радио- и телефонные каналы, линии электропередачи, рельсы и контактный провод на железнодорожном транспорте. В ряде случаев возникает необходимость в управлении и контроле над состоянием небольшого (1…6) количества объектов, расположенных на расстоянии (1…5) км. Это характерно при телемеханизации газо-, водоснабжения и энергохозяйства промышленных предприятий, коммунального хозяйства городов и других объектов. В этих случаях используют простейшие многопроводные системы ТУ-ТС с разделением сигналов. В таких системах для одновременной передачи сигналов для каждого объекта требуется индивидуальный провод линии связи, причем по одному проводу можно передать несколько сигналов. При наличии n-го количества прямых проводов (не считая обратного провода) по такой линии связи можно передать N = k ⋅ n сигналов, где k – число импульсных признаков; обычно k = 2 – 4. 4 5 Структурная схема простейшей многопроводной системы передачи информации представлена на рис. 1, где приняты следующие обозначения блоков: 1КЭ…nКЭ – индивидуальные командные элементы; 1ШПК…nШПК – шифраторы признаков команд; 1ДПК….nДПК – дешифраторы признаков команд; 1ИЭУ….nИЭУ – исполнительные элементы управления; 1ДС……nДС – датчики сигнализации; 1ШПС…nШПС – шифраторы признаков сигналов ТС; 1ДПС….nДПС – дешифраторы признаков сигналов ТС; 1ИЭС….nИЭС – исполнительные элементы сигнализации; Л1 … Лn – прямые провода линии связи; Л0 – обратный провод линии связи. По приведенной структурной схеме могут строиться системы ТУ-ТС как на контактных, так и на бесконтактных элементах. При ТУ команды управления передаются оператором с ДП по линии связи на объект (к КП). Команды формируются с помощью индивидуальных командных элементов КЭ, в качестве которых обычно используются органы ручной коммутации: тумблеры, переключатели, кнопки. Эти сигналы с помощью шифраторов признаков команд ШПК кодируются и поступают в линию связи. В качестве признака команды могут использоваться: амплитуда, полярность, фаза, длительность и др., а также комбинация из нескольких признаков. При приеме команды в КП кодовая посылка дешифрируется в дешифраторе признаков команд ДПК и преобразуется в управляющее воздействие на соответствующий исполнительный элемент управления ИЭУ. В простейшем случае это может быть реле, включающее электродвигатель. Совокупность устройств между ДП и КП для передачи информации ТУ называется телемеханическим каналом управления. В режиме ТС информация передается в КП в обратном 6 направлении – от объекта (с КП) к оператору (на ДП). Информация о состоянии объекта поступает на шифратор признаков сигналов ШПС с датчиков сигнализации ДС, реагирующих на изменение параметров объекта. На ДП после дешифрации в ДПС исполнительные элементы сигнализации ИЭС отображают изменение состояния (положения) объекта управления. Совокупность устройств между КП и ДП для передачи информации ТС называется телемеханическим каналом сигнализации. В телемеханических системах стремятся передавать несколько сигналов управления и сигнализации по общей линии связи, что существенно снижает стоимость линии связи. Это требует специальных средств для уплотнения их на передающей стороне и для разделения сообщений на приемной стороне. Система передачи информации с общим каналом связи, в которой организовано несколько независимых каналов ТУ и ТС, называется многоканальной. Функциональная схема многоканальной системы ТУТС приведена на рис. 2, где приняты те же обозначения функциональных блоков, что и на рис. 1. Дополнительно введены линейные блоки приема и передачи ЛБ1 и ЛБ2. Применяются различные методы уплотнения сигналов: во времени (каждому объекту отводится определенный интервал времени); по частоте (для каждого объекта выделяется своя полоса частот); адресное (каждому объекту присваивается адрес, и все сообщения начинаются с кода адреса объекта). В многоканальных системах телемеханики (особенно при передаче информации на большие расстояния) в качестве переносчика информации часто используют радиоимпульсы (рис. 3). Для придания импульсам признаков команд и сигнализации их модулируют, используя основные виды модуляции (рис. 4): амплитудно-импульсную; частотноимпульсную; широтно-импульсную; фазово-импульсную. 7 8 Рис. 3. Радиоимпульсы Рис. 4. Различные виды импульсной модуляции: а – немодулированная последовательность импульсов; б – передаваемый сигнал; в – амплитудно-импульсная модуляция; г – частотно-импульсная модуляция; д – широтно-импульсная модуляция; е – фазово-импульсная модуляция 9 При отсутствии передаваемого сигнала в телемеханическом канале предается последовательность импульсов, изображенная на рис. 4, а. Эти импульсы имеют определенную амплитуду А1, частоту f1, ширину импульсов l1 и нулевой сдвиг фазы. При появлении сигнала управления или сигнализации, который необходимо передать (рис. 4, б), в начальной последовательности импульсов (рис. 4, а) происходят следующие изменения: – при амплитудной модуляции амплитуда передаваемых импульсов А1 увеличивается до величины А2 (рис. 4, в); – при частотной модуляции частота следования импульсов f1 увеличивается до частоты f2 (рис. 4, г); – при широтно-импульсной модуляции ширина импульсов l1 увеличивается до величины l2 (рис. 4, д); – при фазово-импульсной модуляции передаваемые импульсы сдвигаются по фазе на угол φ (рис 4, е). В данной лабораторной работе рассматривается схемная реализация и работа простейшей двухпроводной многоканальной системы ТУ-ТС (на примере одного объекта). Системы такого типа обладают по сравнению с другими системами ТУ-ТС рядом преимуществ: – высокое быстродействие; – простота технической реализации; – возможность одновременной передачи сигналов телеуправления к нескольким объектам или телесигнализации от нескольких объектов. Данный тип систем имеет и недостатки: – многопроводность линий связи, что ограничивает дальность их действия; – малая помехоустойчивость. 10 3. ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ Лабораторная установка представляет собой макет многопроводной многоканальной системы ТУ-ТС с амплитудно-полярными сигналами, построенный на контактных и полупроводниковых элементах. Система предназначена для передачи сигналов управления одному объекту ТУ и приема сигналов контроля от этого же объекта по одной линии связи. В качестве объекта управления используется двигатель постоянного тока. Все элементы макета смонтированы на общем стенде. Элементы, относящиеся к диспетчерскому пункту (ДП), расположены в левой стороне стенда, а в правой – элементы, относящиеся к контролируемому пункту (КП). Принципиальная электрическая схема макета системы ТУ-ТС приведена на рис. 5 и собирается в процессе выполнения лабораторной работы. Для этого выводы всех элементов подключены к разъемам сборочных панелей . Исполнительные узлы управления и сигнализации, а также линия связи между ДП и КП выполнена постоянным монтажом и сборке не подлежит. Рассмотрим действия оператора и работу схемы при управлении объектом. Предположим, что объект отключен, переключатель S3 находится в нейтральном положении, кнопка S1 передачи команд не нажата. При этом под действием переменного напряжения источника питания через размыкающий контакт реле KV6.2, обмотки реле KV1 и KV3, линии связи, ограничительный резистор R1 и диоды VD1 и VD3 будет протекать ток, полярность которого определяется диодами. Величина этого тока достаточна для срабатывания реле KV1, но недостаточна для срабатывания реле KV3 (см. табл. 1). При срабатывании реле KV1 контакт KV1.1 замыкает цепь питания лампы HL1 «Откл», свечение которой сигнализирует диспетчеру, что объект отключен. 11 Таблица 1 Параметры реле Наименование Реле сигнализации Реле управления Позиция Тип Параметры KV1, KV2 РКМ Iсраб = 33 мА KV3, KV4 РЭС-10 Iсраб = 80 мА Для передачи команды «Включить» объект, ключ характера операции S3 следует перевести в соответствующее положение и нажать кнопку передачи команд S1. При этом параллельно катушке реле KV1 и резистору R1 подключится шунтирующий резистор R2. Благодаря тому, что R2<R1+Rкатушки ток в линии связи возрастает до величины, достаточной для срабатывания реле KV3. Последнее при срабатывании включает исполнительное реле KV5, которое самоблокируется контактом КV5.1, а своим замыкающим контактом KV5.2 включает с помощью промежуточного реле KV6 объект управления – электродвигатель М. Так как объектом управления является электродвигатель, не имеющий блок-контактов, то в качестве датчика сигнализации объекта используется переключающий контакт KV6.2. При включении объекта блок-контакт KV6.2 переключается, разрывает цепь питания реле KV1 и KV3 и подает питание на реле сигнализации KV2. При отключении реле KV1 гаснет сигнальная лампа HL1 «Откл». При отключении реле KV3 размыкается его контакта КV3.1, но реле KV5 не отключится, так как оно ранее самоблокировалось. Срабатывание реле KV2 приводит к загоранию лампы HL2 «Вкл», сигнализирующей о включении объекта. Аналогично система работает при передаче команды «Отключить» объект и сигнализации «Отключен». 12 13 Питание лабораторной установки осуществляется переменным напряжением 60 В (схема управления и контроля, сигнальные лампы) и постоянным напряжением 12 В (реле KV5, KV6 и объект управления). 4. ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ 4.1. Уяснить основные принципы построения систем ТУ-ТС с электрическим разделением одноэлементных сигналов. 4.2. Изучить принципиальную электрическую схему лабораторной установки (рис. 5), ознакомиться с назначением и расположением элементов на стенде. 4.3. Собрать схему на стенде гибкими проводниками. 4.4. Провести анализ работы схемы при передаче команд и сигналов о состоянии объектов. Выяснить функциональное назначение всех элементов. 4.5. Определить качественные признаки отдельно каждого сигнала: ТУ («Включить», «Отключить») и ТС («Включен», «Отключен»). 5. МЕТОДИЧЕСКИЕ УКАЗАНИЯ 5.1. При изучении принципиальной схемы установки выяснить назначение: – диодов VD1–VD4; ограничительных резисторов R1, R3 и шунтирующего резистора R2; – конденсаторов C1–C4. 5.2. Определить элементы, входящие в состав шифраторов и дешифраторов амплитуды и полярности отдельно для сигналов ТУ и ТС, а также входящие в состав индивидуальных командных элементов. 14 6. КОНТРОЛЬНЫЕ ЗАДАНИЯ И ВОПРОСЫ 6.1. Какие качественные признаки используются для формирования сигналов управления и сигнализации? 6.2. Какие существуют способы сокращения числа проводов в линиях связи? 6.3. По каким признакам оператор может судить о неисправностях в линии связи (обрыв и короткое замыкание)? 6.4. Назначение конденсаторов. 6.5. Какие устройства могут быть использованы в качестве исполнительных элементов сигнализации? 7. СОДЕРЖАНИЕ ОТЧЕТА 1. Титульный лист. 2. Цель работы. 3. Схема электрическая принципиальная. 4. Ответы на контрольные вопросы и задания. СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ 1. Беркут, А.И. Системы автоматического контроля технологических параметров / А.И. Беркут, А.А. Рульнов. – М.: Изд-во АСВ, 2005. – 144 с. 2. Рульнов, А.А. Автоматизация систем водоснабжения и водоотведения / А.А. Рульнов, К.Ю. Евстафьев. – М.: ИНФРА, 2008. – 204 с. 3. Конюх, В.Л. Основы робототехники / В.Л. Конюх. – Ростов-н/Д.: Феникс, 2008. – 282 с. 4. Жила, В.А. Автоматика и телемеханика систем газоснабжения: учебник / В.А. Жила. – М.: ИНФРА, 2007. – 236 с. 15