Определение параметров систем, описываемых уравнением
реклама

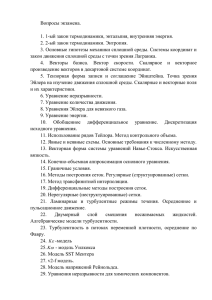
Вестн. Сам. гос. техн. ун-та. Сер. Физ.-мат. науки. — 2009. — № 2 (19). — С. 160–167 УДК 681.5.015 ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ СИСТЕМ, ОПИСЫВАЕМЫХ УРАВНЕНИЕМ ЭЙЛЕРА, НА ОСНОВЕ СТОХАСТИЧЕСКИХ РАЗНОСТНЫХ УРАВНЕНИЙ М. А. Заусаева, В. Е. Зотеев Самарский государственный технический университет, 443100, Самара, ул. Молодогвардейская, 244. E-mail: [email protected] Рассматривается задача определения параметров динамических систем, которые описываются дифференциальным уравнением Эйлера. Задача решается на основе стохастических разностных уравнений, описывающих результаты измерений мгновенных значений отклика системы. Ключевые слова: параметрическая идентификация, импульсная характеристика, линейно параметрическая дискретная модель, стохастическое разностное уравнение. Рассмотрим динамическую систему, которая описывается дифференциальным уравнением Эйлера n-ного порядка: (x − x0 )n y (n) (x) + b1 (x − x0 )n−1 y (n−1) (x) + · · · + bn y(x) = m X cj f (j)(x), (1) j=0 где x0 , bi , cj ∈ R, f (x) — входное воздействие, y(x) — выходная характеристика. Используя линейное преобразование аргумента, уравнение (1) всегда можно привести к виду xn y (n) (x) + b1 xn−1 y (n−1) (x) + · · · + bn y(x) = m X cj f (j) (x). (2) j=0 Одним из основных типов тестового воздействия на систему является импульсное воздействие, которое описывается δ-функцией Дирака. В этом случае реакция системы (импульсная характеристика) при наличии кратных корней соответствующего характеристического уравнения может быть представлена в виде функции ỹ(x) = mi n X X aij (ln x)j−1 xαi , i=1 j=1 где αi = Re αi + i Im αi и aij = Re aij + i Im aij — в общемPслучае комплексные n числа, mi — кратность i-того корня (i ≡ 1, 2, . . . , n), i=1 mi = p — общее число корней. Мария Анатольевна Заусаева, аспирант, каф. прикладной математики и информатики. Владимир Евгеньевич Зотеев (к.ф.-м.н., доц.), доцент, каф. прикладной математики и информатики. 160 Определение параметров систем, описываемых уравнением Эйлера. . . Временная последовательность мгновенных значений отклика системы описывается дискретной функцией вида ỹk = mi n X X aij (ln xk )j−1 xαk i . (3) i=1 j=1 С помощью подстановки xk = exp(τ k), где τ — некоторая константа (период дискретизации), функция (3) сводится к виду ỹk = mi n X X aij (τ k)j−1 µk , (4) i=1 j=1 где µi = exp(αi τ ), i ≡ 1, 2, . . . , n, k ≡ 0, 1, 2, . . . . Очевидно, что теоретические мгновенные значения отклика динамиче ской системы ỹk = ỹ(xk ) = ỹ exp(τ k) соответствуют не равномерной, а экспоненциальной дискретизации аргумента xk . Путем применения к дискретной функции (4) z-преобразования, можно построить линейно параметрическую дискретную модель, связывающую в виде рекуррентной формулы p + 1 её мгновенных значений [1]: ỹk = λp+1+k , k ≡ 0, 1, . . . , p − 1, λ1 ỹk−1 + λ2 ỹk−2 + · · · + λp ỹk−p, k ≡ p, p + 1, . . . , N − 1, (5) где N — объём выборки мгновенных значений функциональной зависимости, а коэффициенты λj (j ≡ 1, 2, . . . , 2p) известным образом связаны с параметрами импульсного воздействия и определяются следующими соотношениями: λ1 = p X νi , i=1 λ2 = − λ3 = λp−1 λp p X i,j i<j p X νi νj , νi νj νk , i,j,k i<j<k (6) .. . p = (−1) = p X νi1 νi2 . . . νip−1 , i1 ,i2 ,...,ip−1 i1 <i2 <...<ip−1 p Y p+1 νi (−1) i=1 161 З а у с а е в а М. А., З о т е е в В. Е. n X ai1 , λp+1 = ỹ0 = i=1 mi n X X aij τ j−1 µi , λp+2 = ỹ1 = i=1 j=1 mi n X X aij (2τ )j−1 µ2i , λ = ỹ = p+3 2 i=1 j=1 λp+l λ2p (7) .. . = ỹl−1 = mi n X X aij (l − 1)τ mi n X X aij (p − 1)τ i=1 j=1 j−1 µl−1 i , .. . = ỹp−1 = i=1 j=1 j−1 µp−1 . i где ν1 = ν2 = · · · = νm1 = µ1 ; νm1 +1 = νm1 +2 = · · · = νm1 +m2 = µ2 ; νm1 +m2 +1 = = νm1 +m2 +2 = · · · = νm1 +m2 +m3 = µ3 ; νm1 +m2 +···+mp−1 +1 =νm1 +m2 +···+mp−1 +2 = · · · = νm1 +m2 +···+mp = µn . При обработке экспериментальных данных формируется выборка результатов измерений yk = ỹk + εk , которые содержат случайную помеху εk , k ≡ 0, 1, . . . , N − 1, N — объём выборки. В этом случае линейно-параметрическая дискретная модель (5) принимает вид стохастического разностного уравнения k ≡ 0, 1, . . . , p − 1 λpp+1+k + εk , p X X (8) yk = λi εk−i + εk , k ≡ p, p + 1, . . . , N − 1 λi yk−i − i=1 i=1 и может быть представлена в форме обобщенной регрессионной модели: b = F λ + η, (9) η = Pλ ε. Здесь λ = (λ1 , λ2 , . . . , λ2p )⊤ — вектор неизвестных коэффициентов линейнопараметрической дискретной модели; ε = (ε0 , ε1 , . . . , εN −1 )⊤ — N -мерный вектор случайной помехи в результатах наблюдений; η = (η1 , η2 , . . . , ηN )⊤ — N -мерный вектор эквивалентного случайного возмущения в стохастическом разностном уравнении; b = (y0 , y1 , . . . , yN −1 )⊤ — N -мерный вектор правой ча . .. . .. сти; F = f1 ..f2 .....fp ..fp+1 .....f2p — матрица регрессоров размера N ×2p, столбцы которой описываются следующими формулами: f1 = (0, 0, . . . , 0, yp−1 , yp , . . . , yN −2 )⊤ , ..., 162 f2 = (0, 0, . . . , 0, yp−2 , yp−1 , . . . , yN −3 )⊤ , fp = (0, 0, . . . , 0, y0 , y1 , . . . , yN −p−1 )⊤ , fp+1 = (1, 0, . . . , 0)⊤ , Определение параметров систем, описываемых уравнением Эйлера. . . fp+2 = (0, 1, 0, . . . , 0)⊤ , ..., f2p = (0, 0, . . . , 1, 0, . . . , 0)⊤ . Квадратная матрица Pλ размера N в стохастическом разностном уравнении эквивалентного возмущения является нижней треугольной. Первые p строк матрицы выглядят так: p1 = (1, 0, . . . , 0), p2 = (0, 1, 0, . . . , 0), ..., pp = (0, 0, . . . , 1, 0, . . . , 0), а их коэффициенты описываются формулой 1, j = i, pij = 0, j 6= i, где i ≡ 1, 2, . . . , p, j ≡ 1, 2, . . . , N . Остальные строки матрицы Pλ имеют следующий вид: pp+1 = (−λp , −λp−1 , −λp−2 , . . . , −λ2 , −λ1 , 1, 0, . . . , 0), pp+2 = (0, −λp , −λp−1 , −λp−2 , . . . , −λ2 , −λ1 , 1, 0, . . . , 0), pN = (0, . . . , 0, −λp , −λp−1 , −λp−2 , . . . , −λ2 , −λ1 ). ..., Рассмотрим численный метод определения параметров динамической системы (1), в основе которого лежит стохастическое разностное уравнение, описывающее последовательность результатов измерений мгновенных значений отклика системы. В основе метода лежит итерационная процедура среднеквадратичного оценивания коэффициентов линейно параметрической дискретной модели в форме стохастических разностных уравнений. При среднеквадратичном оценивании коэффициентов обобщенной регрессионной модели (9) могут быть использованы различные схемы вычислений. Наиболее простым является алгоритм, в основе которого лежит минимизация функционала kη̂k2 = kb − F λ̂k2 → min. В этом случае среднеквадратичные оценки коэффициентов вычисляются по формуле λ̂ = (F ⊤ F )−1 F ⊤ b. Однако известно, что эти оценки будут иметь большое смещение. Для вычисления коэффициентов обобщенной регрессионной модели (9) можно применить более эффективный и помехозащищенный алгоритм итерационного метода среднеквадратичного оценивания коэффициентов разностного уравнения [2]. Из формул (9) получаем Pλ−1 b = Pλ−1 F λ + ε. −1 зависят от коэффициентов λj и Элементы p−1 ij обратной матрицы Pλ описываются формулами 1, j = i, −1 pij = 0, j 6= i, если i ≡ 1, 2, . . . , p, j ≡ 1, 2, . . . , N , и 163 З а у с а е в а М. А., З о т е е в В. Е. p−1 ij = p P λk p−1 1+ i−k,j , j = i, k=1 p P k=1 λk p−1 i−k,j , j 6= i, если i ≡ p + 1, p + 2, . . . , N , j ≡ 1, 2, . . . , N . В основе итерационной процедуры лежит минимизация функционала kε̂k2 ≈ kP −1 b − P −1 F λ̂k2 → min, (k) (k) λ̂ λ̂ где P −1 — обратная матрица, при вычислении элементов которой используλ̂(k) ˆ (k) ются оценки λj коэффициентов разностного уравнения, найденные на k-той итерации. Очевидно, что данный функционал представляет собой квадратичную форму относительно искомых коэффициентов λj . Следовательно, он достигает своего неотрицательного минимума. При этом нетрудно показать, что минимум данного функционала достигается в точке −1 ⊤ −1 (10) λ̂(k+1) = F ⊤ Ω−1 F F Ω (k) b, Ωλ̂(k) = Pλ̂(k) Pλ̂⊤(k) . (k) λ̂ λ̂ На первом шаге итерационной процедуры находится начальное прибли−1 жение: λ̂(0) = (F ⊤ F ) F ⊤ b. Затем по формуле (10) при λ̂(k) = λ̂(0) вычис−1 ⊤ −1 ляется следующее приближение: λ̂(1) = F ⊤ Ω−1 F F Ω (0) b. Оно вновь (0) λ̂ λ̂ подставляется в правую часть формулы (10) и находится новое приближение λ̂(2) и т. д. Исследована сходимость итерационной процедуры вычисления коэффициентов разностного уравнения, а именно: сформулированы достаточные условия сходимости итерационной процедуры среднеквадратичного оценивания коэффициентов разностного уравнения; получена формула апостериорной оценки погрешности, использующая два последовательных приближения; сформулированы ограничения на величину случайной помехи, обеспечивающие достаточное условие сходимости итерационной процедуры; построена формула априорной оценки погрешности, позволяющая оценить число итераций, необходимое для достижения заданной точности [3]. Найденные среднеквадратические оценки λ̂j коэффициентов линейно-параметрической дискретной модели (8) лежат в основе вычисления помехозащищённых оценок параметров импульсной характеристики αi и aij , i ≡ 1, 2, . . . , n, j ≡ 1, 2, . . . , mi . Для этого сначала находятся корни µ̂i (i≡1, 2, . . . , p) следующего алгебраического уравнения: µp − λ̂1 µp−1 − λ̂2 µp−2 − · · · − λ̂p−1 µ − λ̂p = 0. (11) Затем по формулам α̂i = τ −1 ln µ̂i вычисляются оценки параметров αi , i ≡ 1, 2, . . . , n. На заключительном этапе по найденным оценкам λ̂i (i ≡ p + 1, p + 2, . . . , 2p) и корням µ̂i уравнения (11) находятся оценки коэффициентов aij (i ≡ 1, 2, . . . , n, j ≡ 1, 2, . . . , mi ) в функции (3). Для этого решается следующая система линейных алгебраических уравнений: 164 Определение параметров систем, описываемых уравнением Эйлера. . . n X aˆi1 = λ̂p+1 , i=1 mi n X X aˆij τ j−1 µ̂i = λ̂p+2 , i=1 j=1 mi n X X aˆij (2τ )j−1 µ̂i 2 i=1 j=1 mi n X X j−1 (p−1) µ̂i aˆij (p − 1)τ = λ̂p+3 , .. . = λ̂2p . i=1 j=1 Проведены численно-аналитические исследования эффективности разработанного метода определения параметров динамической системы, описываемой дифференциальным уравнением Эйлера. В качестве примера была рассмотрена динамическая система, на которую оказывали импульсное воздействие, описываемая дифференциальным уравнением Эйлера следующего вида: x4 y IV (x) + b1 x3 y ′′′ (x) + b2 x2 y ′′ (x) + b3 xy ′ (x) + b4 y(x) = 0. Рассмотрим случай, когда отклик системы на такой тип воздействия описывается функцией ỹ(x) = (a1 + a2 ln x)xα1 + a3 xα2 cos(ω ln x + ψ), где a1 = a2 = a3 = 1, α1 = −0,5, α2 = −0,1, ω = ψ = π. Для оценки погрешности в относительных к истинным значениям единицах вычислялось смещение оценок параметров импульсной характеристики при величине случайной помехи ε = 10, периоде дискретизации τ = 0,9 и объёме выборки N = 50. В таблице представлены истинные значения, результаты и погрешности вычисления параметров отклика системы различными методами: без устранения смещения в оценках и итерационным методом среднеквадратичного оценивания, представленным в данной статье. Видно, что по сравнению с известным методом устранения смещения применение итерационного метода среднеквадратичного оценивания коэффициентов стохастического разностного уравнения позволяет существенно повысить точность вычисления параметров динамической системы. Параметры модели a1 Истинные значения 1,000 Оценки, вычисленные 0,926/ известным методом / 7,40 Смещение оценок Оценки, вычисленные 0,989/ итерационным методом / Смещение оценок 1,11 a2 1,000 a3 1,000 α1 −0,500 α2 −0,100 ω 3,142 ψ 3,142 0,970/ 3,02 1,258/ 25,82 −0,563/ 12,68 −0,135/ 35,40 3,104/ 1,19 3,409/ 8,51 0,992/ 0,84 1,061/ 6,15 −0,513/ 2,53 −0,100/ 0,03 3,141/ 0,01 3,158/ 0,51 165 З а у с а е в а М. А., З о т е е в В. Е. На рисунке представлены истинная кривая отклика системы (кривая 1), смоделированные результаты наблюдений yk = y˜k + εk , k ≡ 1, 2, . . . , 50 (точки 2) и восстановленная с помощью разработанного метода параметрической идентификации импульсная характеристика системы (кривая 3). Результаты наблюдений и восстановленная по ним импульсная характеристика системы Полученные результаты свидетельствую о высокой помехоустойчивости разработанного метода определения параметров системы, описываемой уравнением Эйлера. Применение итерационной процедуры среднеквадратичного оценивания коэффициентов стохастического разностного уравнения позволяет практически устранить смещение в оценках и тем самым повысить точность результатов вычислений. Работа выполнена в рамках АВЦП «Развитие научного потенциала высшей школы (2009–2010)» (проект РНП 2.1.1/745). БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Деч Г. Руководство к практическому применению преобразования Лапласа и z-преобразования. — М.: Наука, 1971. — 288 c. 2. Зотеев В. Е. Параметрическая идентификация диссипативных механических систем на основе разностных уравнений / ред. В. П. Радченко. — М.: Машиностроение-1, 2009. — 344 c. 3. Зотеев В. Е. Исследование сходимости итерационной процедуры вычисления коэффициентов разностного уравнения / В сб.: Труды Шестой Всероссийской научной конференции с международным участием (1–4 июня 2009 г.). Часть 4: Информационные технологии в математическом моделировании / Мат. моделирование и краевые задачи. — Самара: СамГТУ, 2009. — C. 47–54. Поступила в редакцию 13/VIII/2009; в окончательном варианте — 15/X/2009. 166 Defining the Parameters of the Systems Described by . . . MSC: 65P40, 34C15, 37M05 DEFINING THE PARAMETERS OF THE SYSTEMS DESCRIBED BY EULER’S EQUATION, BASED ON STOCHASTIC DIFFERENCE EQUATIONS M. A. Zausaeva, V. E. Zoteev Samara State Technical University, 244, Molodogvardeyskaya str., Samara, 443100. E-mail: [email protected] The problem of parametrical identification of the systems which are described by Euler’s differential equation is studied. This problem is solved on the base of stochastic difference equations describing the results of measurements of the instantaneous values of output impact of system. Key words: parametrical identification, impulse characteristic, linear parametric discrete model, stochastic difference equations. Original article submitted 13/VIII/2009; revision submitted 15/X/2009. Maria A. Zausaeva, Postgraduate Student, Dept. of Applied Mathematics and Computer Science. Vladimir E. Zoteev (Ph. D. (Phys. & Math.)), Associate Professor, Dept. of Applied Mathematics and Computer Science.