Способы минимизации выброса в устройствах управления
advertisement

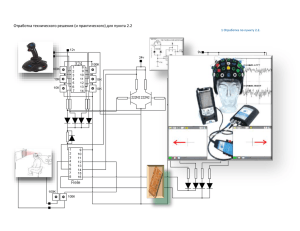
Способы минимизации выброса в устройствах управления амплитудой мощных однополярных импульсов Ахтямов Р. Ш., магистрант 2-го года обучения, группа 141-М Научный руководитель – проф., д.т.н Титов А.А. Проект ГПО РЗИ-0902 – Устройства регулирования, модуляции и ограничения амплитуды мощных периодических и импульсных сигналов Мощные импульсные сигналы широко применяются в современной технике: в радиолокации, радионавигации, медицине и промышленности. Соответственно весьма актуальной становится необходимость управления и ограничения амплитуды мощных импульсов: для защиты импульсных усилителей от перегрузки по входу и рассогласования по выходу [1], для стабилизации характеристик генераторов мощных импульсов [2]. На сегодняшний день с этой целью широко используются разрядники, варисторы и различные полупроводниковые устройства. Однако данные устройства управления (УУ) амплитудой импульсных сигналов рассчитаны на уровни мощности в импульсе не превышающие 0,5…1 Вт [3]. Для управления амплитудой более мощных импульсов предлагается использовать УУ, принцип работы которых основан на свойстве биполярного транзистора играть роль самоуправляемого ограничителя однополярных импульсов [4]. Возможны различные способы реализации таких УУ, которые подробно описаны в [1, 5–8]. Данные УУ уже нашли применение на практике: используются в СВЧ – генераторе [2] для стабилизации выходной мощности СВЧ генератора в диапазоне температур ± 500 С, при изменении напряжения питания в пределах 55…100 В, и одновременно для обеспечения стабилизации частоты генерации диода Ганна в течении действия импульса возбуждения. Принципиальная схема УУ приведена на рис. 1. Зависимость формы сигнала на выходе схемы устройства управления при различных его амплитудах приведена на рис. 2. Для устройств управления амплитудой мощных импульсных сигналов характерно появление выброса на переднем фронте импульса в процессе управления его амплитудой, что является существенным недостатком. Наличие выбросов уменьшает динамический диапазон и ограничивает область применения устройства. В этой связи целесообразным представляется нахождение простого и эффективного способа минимизации выбросов. Для решения данной проблемы предлагается использование коррекции, приводятся схемы и сравнение различных типов коррекции. Рис. 1. Принципиальная схема УУ б) Uвых=-40 В а) Uвых=-60 В Рис. 2. Зависимость формы сигнала на выходе УУ при различных его амплитудах Для расширения динамического диапазона (ДД) УУ, ограниченного допустимой величиной выброса на переднем фронте выходных импульсов, предложено использовать две схемы коррекции. Под динамическим диапазоном УУ, при этом, понимается отношение максимального значения амплитуды выходного импульса к его минимальному значению. Принципиальные схемы УУ, с предложенными схемами коррекции, приведены на рис. 3 и 4. Рис. 3. Принципиальная схема УУ с индуктивной коррекцией Рис. 4. Принципиальная схема УУ с корректирующей RC цепью Исследования эффективности использования предложенных схем коррекции проводились с применением программной среды Multisim 11.0, в которой биполярные транзисторы описываются с помощью нелинейной модели Гуммеля – Пуна [9]. При расчетах ДД сопротивление нагрузки УУ полагалось равным 50 Ом, допустимая величина выброса на переднем фронте выходных импульсов была принята равной 10 % от их амплитуды, в качестве транзистора VT1 использовались транзисторы типа FMMT591A, BD136, 2N2906A, SMBTA70, SXTA92. В качестве диода - HFA04TB60. Исследование включало в себя расчёт динамического диапазона и времени установления для схемы УУ без коррекции, затем – для схем УУ с различными типами коррекций и значениями корректирующих элементов. В процессе исследований установлено, что для схемы с L-коррекцией (рис. 3) с ростом величины индуктивности катушки L1 происходит увеличение ДД, при одновременном возрастании времени установления фронта импульса t у на выходе УУ. Характеристики зависимости ДД от допустимого значения времени установления фронта импульса в схеме (рис. 3) для трех типов транзисторов приведены на рис. 5. Рис. 5. Зависимость динамического диапазона схемы (рис. 3) от допустимого значения tу Рис. 6. Зависимость динамического диапазона схемы (рис. 4) от допустимого значения t у Исследования схемы с RC-коррекцией (рис. 4) показали, что при фиксированном значении величины резистора R3 и с ростом величины емкости конденсатора С2 (рис. 4) также происходит увеличение ДД, при одновременном возрастании времени установления фронта импульса t у на выходе УУ. Характеристики зависимости ДД от допустимого значения времени установления фронта импульса в схеме (рис. 4) для трех типов транзисторов приведены на рис. 6. Анализируя зависимости, приведенные на рис. 5 и рис. 6, можно сделать следующие выводы: граничная частота f т не является определяющей для ДД исследуемого устройства управления (транзистор BCX17 имеет f т =80 МГц, транзистор BD136 имеет f т =160 МГц); рассеиваемая на коллекторе транзистора мощность PC также не является определяющей для ДД (BD136 имеет PC=8 Вт, а FMMT591A имеет PC=0,5 Вт); увеличение требуемого значения ty приводит к пропорциональному увеличению ДД рассматриваемого УУ; предложенные схемы коррекции имеют примерно одинаковую эффективность, однако при RC-коррекции уменьшается амплитуда импульсов. Использование простейших типов коррекции позволяет уменьшить выброс на переднем фронте импульсов. Обнаружено, что оба предложенных типа коррекции (L и RC) обеспечивают практически одинаковую эффективность. Выбор требуемой величины коррекции можно осуществлять на основе полученных экспериментально графиков зависимости динамического диапазона от времени установления. Так увеличивая динамический диапазон в 10-15 раз, получим увеличение времени установления – в 5-7 раз. Таким образом, использование данных схем коррекции позволит улучшить характеристики схем, имеющих в своём составе устройства управления амплитудой мощных импульсных сигналов. Литература 1. Титов А.А. Управление амплитудой мощных гармонических и импульсных сигналов // Электроника. НТБ – 2010. – № 1. – С. 78–83. 2. Воронина Ю.А., Добриков Д.С., Зеляков Ю.С., Титов А.А. Устройства управления амплитудой мощных гармонических сигналов // Научная сессия ТУСУР-2011: Материалы докладов Всероссийской научно-технической конференции, Томск, 4–7 мая 2011 г. – Томск: Изд-во «В-Спектр», 2011. Ч. 2. – С. 317–320. 3. Титов А.А., Красько А.С. Использование транзисторов с закрытыми переходами для управления амплитудой мощных сигналов // Сборник статей одиннадцатой международной научно-практической конференции "Фундаментальные и прикладные исследования, разработка и применение высоких технологий в промышленности", Т. 4, г. Санкт-Петербург, Россия, 27-29 апреля 2011 года / под ред. АЛ. Кудинова. – СПб.: Изд-во Политехи, ун-та, 2011 г. С.131–133. 4. Титов А.А., Жданов Д.А., Костылёва О.В. Методика проектирования устройств защиты полосовых усилителей мощности от перегрузок // Электронная техника. Сер. СВЧ – техника. – 2011. – Вып. № 4. – С. 32–40. 5. Пат. № 2240645 РФ, МПК H 03 С 1/42. Амплитудный модулятор мощных сигналов / А.А. Титов, В.Н. Ильюшенко. – Опубл. 20.11.2004, Бюл. № 32. 6. Заявка на изобретение № 2011120669 РФ, МПК H03С 1/40. Устройство управления амплитудой мощных гармонических сигналов / А.А. Титов, А.В. Семёнов, И.А. Акрестина. – Приоритет от 20.05.2011. 7. Заявка на изобретение № 2012100221 РФ, МПК H03С 1/40. Устройство управления амплитудой мощных периодических сигналов / А.А. Титов, А.В.Семёнов, М.Ю Покровский. – Приоритет от 10.01.2012. 8. Титов А.А. Регулировка и модуляция амплитуды мощных сигналов // Электросвязь. – 2007. – № 12. – С. 46–48. 9. Титце У., Шенк К. Полупроводниковая схемотехника. 12_е изд. Том I: Пер. с нем. – М.: ДМК Пресс, 2008. – 832 с.