Пшихопов В.Х., Медведев М.Ю. СТРУКТУРНЫЙ СИНТЕЗ НЕЛИНЕЙНЫХ АППРОКСИМИРУ- ЮЩИХ НАБЛЮДАТЕЛЕЙ Введение
реклама

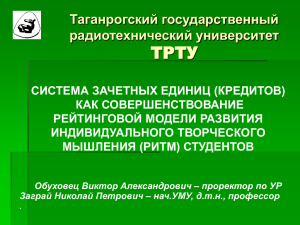
Пшихопов В.Х., Медведев М.Ю. СТРУКТУРНЫЙ СИНТЕЗ НЕЛИНЕЙНЫХ АППРОКСИМИРУЮЩИХ НАБЛЮДАТЕЛЕЙ1 Технологический институт Южного федерального университета в г. Таганроге, г.Таганрог, [email protected] Введение Оптимальное решение задачи оценивания дает фильтр Калмана – Бьюси [1, 2]. Однако коэффициенты фильтра Калмана-Бьюси вычисляются в разомкнутой форме как решения уравнения Риккати, что ухудшает свойства фильтра при действии неучтенных факторов. В [3 – 8] рассматриваются варианты наблюдателей, использующих разложение процесса во временные ряды. В [3] в дискретные моменты корректируются коэффициенты, полученные в результате решения уравнения Риккати. В [4 – 7] используется рекуррентный наблюдатель производных (РНП), коэффициенты которого выбираются из условий подавления шумов. Предложены структура наблюдателя и нелинейное изменение коэффициентов, обеспечивающее повышение быстродействия. В [8] предлагается наблюдатель, коэффициенты которого непрерывно зависят от ошибки оценивания. В данной статье, на основе работ [9 – 11] предлагается метод синтеза нелинейных наблюдателей, особенностью которого является то, что он обеспечивает синтез структуры. Процедура синтеза наблюдателя Ставится задача синтеза наблюдателя производных, оптимизирующего быстродействие при ограничениях, задаваемых требуемым качеством подавления шумов. Перепишем наблюдателя [4 – 8] в виде: xi1 xi 2 ui1 , xi 2 ui 2 . (1) где ui1 , ui 2 – выбираемые функции. Цель синтеза задается в виде следующего многообразия: i zi xi1 0 . (2) В соответствии с работами [9 – 11] сформируем функцию: H i xi1 i xi 2 zi xi1 xi 2 ui1 ui 2 . (3) Управляющие воздействия ui1 , ui 2 , выбираются из условия мак- симума функции (3: 1 Работа поддержана грантами РФФИ № 10-08-00200-а, № 10-08-00219-а max ui1 U imax 1 sign zi xi1 , ui 2 U i 2 sign zi xi1 max где U i1 max , U i2 (4) – ограничения на управляющие воздействия. Подстановка (4) в (3) дает: H zi xi1 xi 2 U imax U imax sign zi xi1 . 1 2 (5) Из (5) видно, что при выполнении условия U imax U imax xi 2 , 1 2 (6) функция (5) наблюдателя (1), (4) является положительно определенной. В результате синтеза получена структура наблюдателя. Его параmax метры U i1 max , U i2 могут определяться исходя из требований к подав- лению шумов. Моделирование наблюдателя Результаты моделирования представлены на рис. 1 и 2. 60 1.5 z(t) u1opt(t) 50 40 1 x1lin(t) 30 x1opt(t) 20 0.5 u1lin(t) 10 0 -10 0 0 0.05 0.1 0.15 0.2 0.25 0 0.35 0.3 0.05 0.4 t,c 0.1 0.15 0.2 0.45 0.5 0.25 Рис. 1 – Выходная переменная Рис. 2 – Изменение управления Входной сигнал задается следующей функцией времени z t 1 sin t . Ограничения на управления заданы в виде U1max 600 , U 2max 900 . В линейном наблюдателе коэффициенты усиления равны k1 600, k2 900 . При моделировании знаковая функция sign заменена непрерывную функцию tan sig . Заключение В данной статье представлен метод синтеза наблюдателей производных, обеспечивающих максимальное быстродействие при заданной 0.3 0.35 степени подавления шумов. Наблюдатель синтезирован на основе принципа максимума. 1. Bucy R. Nonlinear filtering theory // IEEE Trans. Automat. Control. 1965. V. AC-1. № 2. P. 198. 2. Квакернаак Х., Сиван Р. Линейные оптимальные системы управления. М.: Мир, 1977. 3. Красовский А.А. Циклическое оценивание при первичной обработке сигналов датчиков // Автоматика и телемеханика. 1987. № 4. С. 52 – 60. 4. Медведев М.Ю. Синтез системы управления регулирующими органами// Известия ТРТУ. Специальный выпуск. Материалы XLVIII научно-технической конференции ТРТУ, Таганрог: Из-во ТРТУ, 2003. N 1(30). С. 44-48. 5. Пшихопов В.Х., Медведев М.Ю. Структурный синтез автопилотов подвижных объектов с оцениванием возмущений // М., Информационноизмерительные и управляющие системы. 2006. №1. С.103-109. 6. Пшихопов В.Х., Медведев М.Ю., Сиротенко М.Ю., Носко О.Э., Юрченко А.С. Проектирование систем управления роботизированных воздухоплавательных комплексов на базе дирижаблей. // Известия ТРТУ. Тематический выпуск. Перспективные системы и задачи управления. Таганрог: Изд-во ТРТУ, 2006, № 3 (58). С. 160 – 167. 7. Пшихопов В.Х., Медведев М.Ю. Структурно-алгоритмические подходы к решению задач моделирования, прогнозирования и поддержки принятия управленческих решений в социальноэкономических системах // М., Информационно-измерительные и управляющие системы. 2008. № 3, т. 6. С. 88 – 94. 8. Медведев М.Ю. Структура и алгоритмическое обеспечение нелинейного наблюдателя производных в условиях действия случайных шумов // Известия ЮФУ. Технические науки. № 12. 2008. С. 20 – 25. 9. Медведев М.Ю. Синтез замкнутых оптимальных по быстродействию управлений каскадными нелинейными динамическими системами с ограничениями на координаты // Мехатроника, автоматизация и управление. 2009, № 7. С. 2 – 6. 10. Медведев М.Ю. Синтез субоптимальных управлений нелинейными многосвязными динамическими системами // Мехатроника, автоматизация и управление. 2009, № 12. С. 2 – 8. 11. . Пшихопов В.Х., Медведев М.Ю. Синтез адаптивных систем управления летательными аппаратами // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – 2010. – № 3(104). – С. 187 – 196.