15. К относительности движения материальной точки
реклама

УДК 531
A. МАХМУДОВ
http//speclabngmk.narod.ru
К
относительности движения материальной точки в пространстве
Известно, что механика Ньютона и геометрия Галилея тесно взаимосвязаны, и часто механику
Ньютона называют механикой Галилео – Ньютона. Также общеизвестно, что одними из первых
вопросов, с которыми столкнулись создатели механики это :
а) есть – ли приоритетные системы отсчета?
б) можно – ли найти уравнения, описывающих движение некоторой материальной точки,
которые бы имели один и тот же вид в любых других системах отсчета?
с) как можно перейти из одной системы отсчета в другую?
д) что такое относительность движения?
С этой целью были сформулированы принципы относительности. Одним из первых принципов
был принцип относительности Птоломея – Коперника. Согласно этого принципа, можно
пользоваться любой системой отсчета для описания движения тел. Например, форма уравнений
Лагранжа второго рода выражает принцип Птоломея – Коперника. Этот принцип не является
физическим принципом и формально утверждает непротиворечивость между уравнениями в
разных системах отсчета.
Физическим принципом относительности считается принцип относительности Галилея [ 1 ]. Этот
принцип определяет собой Галилееву геометрию, отличную , как известно, от Евклидовой.
Принцип относительности Галилея состоит из следующих предложений :
1. Евклидова геометрия справедлива для пространства в каждой инерциальной системе
отсчета.
2. Соблюдается неизменность длин и промежутков времени при переходе от одной системы
отсчета к другой.
3. Признается неизменность свойства прямолинейности и равномерности движения.
Рассмотрим пример, который используется для обоснования равноправности систем
отсчета. Пусть имеются две платформы, на которых проводятся эксперименты по
падению или движению материального тела ( например, ядра ) при равномерном,
прямолинейном горизонтальном движении одной платформы и при неподвижности
второй. Утверждается, что как при равномерном движении платформы, так и при
неподвижности платформы ядро будет с одной и той же высоты падать или двигаться по
платформе, при заданной одинаковой начальной скорости, за одно и то же время.
Немного изменим эксперимент. Пусть платформы , как корабли Галилея, имеют мачты но
трубчатые, в которых свободно и равномерно может лететь ядро. Расположим одного
наблюдателя Н с часами на неподвижной платформе, а второго Н´ на подвижной. На
вершине и у вершины каждой мачты расположим по ядру. Будем считать, что отсутствует
сила тяжести и нет сопротивления воздуха.
Если обе платформы неподвижны, то оба наблюдателя, при постоянной скорости w вдоль
мачт всех ядер, зафиксируют одинаковое время t соприкосновения ядер с платформой.
Пусть теперь вторая платформа движется прямолинейно и равномерно со скоростью v , а
ядра еще до начала движения платформы прикреплены к мачте. Наблюдатель Н´ увидит,
что оба ядра коснутся платформы за время t´ по своим часам со скоростью w´.
Наблюдатель Н увидит, что ядра движутся по наклонной и зафиксирует время движения
равным t по своим часам. Если положить, что ядра не прикреплены и задать им
одновременно с движением второй платформы горизонтальную скорость v и считать, что
ядра находящиеся прямо над мачтами провалятся в них , то трубчатые мачты заставят эти
ядра двигаться вертикально вниз, и каждый наблюдатель увидит одни и те же траектории
движения но для разных ядер.
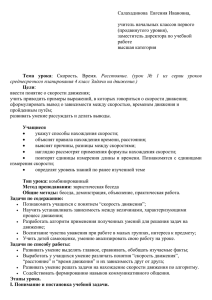
Рассмотрим случай, когда ядро летит внутри трубчатой мачты не движущейся платформы с
постоянной скоростью w для наблюдателя Н и второго ядра летящего с постоянной
скоростью w´ для наблюдателя Н´ ( Рис. 1 ).
у
y´
А
А´
w×t
w´
w´×t´
w
v ,v´
О
v×t
В
x´
v´×t´
В´
х
Рис. 1
Здесь ( х , у ) , ( х´ , у´ ) соответственно неподвижная и подвижная системы координат.
Система координат ( х´ , у´ ) движется вдоль оси Ох с постоянной скоростью v . В этом случае
наблюдатель Н будет видеть движение ядра внутри мачты по траектории АВ´. Наблюдатель Н
будет фиксировать скорость платформы и время падения ядер как v , t , а наблюдатель Н´
полагать , что v´ - предполагаемая им скорость движения платформы , t´ - время движения .
Следовательно, наблюдатель Н может вычислить отрезок
АВ´ = √ { ( АВ )² + ( ВВ´ )² } ,
а наблюдатель Н´ может вычислить тот же отрезок
АВ´ = √ { ( А´В´ )² + ( АА´ )² }.
Следовательно, можно записать :
( АВ´)² = ( w × t )² + ( v´ × t´ )² ,
( АВ´)² = ( w´ × t´)² + (v × t )²,
d² = ( w × t )² - ( v × t )² = ( w´ × t´ )² - ( v´ × t´ )² = d´² .
(1)
В соотношении ( 1 ) можно положить w = w´ , v = v´,
d² = ( w × t´ )² - ( v × t´ )² ,
(2)
d´² = ( w × t )² - ( v × t )² .
(3)
Теперь примем следующие положения:
1) Назовем систему координат ( х , у ) основной .
2) Дадим наблюдателю основной системы координат право утверждения эталона времени
– секунда ( сек ) и расстояния – метр ( м ).
3) Наблюдатель, находящийся в подвижной системе, вынужден вводить свои эталоны
времени - сек´ и расстояния - м´ согласовывая их с основными эталонами.
4) В качестве эталона времени используем соотношения:
d ⁄ w = t = T сек. ,
d´ ⁄w´ = ( 1 - ( v⁄w )² ) ×T´сек´,
где Т ,Т´ - безразмерное время.
Тогда из ( 2 ) или ( 3 ) , получим:
d ⁄ w = Т сек = ( √ { 1 - ( v ⁄ w )² } ) × Т´ сек´ .
(4)
Соотношение ( 4 ) позволяет сделать предположения: или сек = сек´, или безразмерное
время Т равно безразмерному времени Т´.
Если предположить, что сек = сек´ , а ядро считать корпускулой света, то получим известную из
специальной теории относительности формулу :
Т´ = Т ⁄ ( √ ( 1 - ( v⁄w)² ) ).
(5)
Если предположить, что Т = Т´ , то будем иметь
сек = ( √ ( 1 - ( v⁄w)² ) ) сек´
(6)
Умножая соотношение ( 3 ) справа на ( w⁄w) и принимая во внимание, что d´ = w×t и полагая
d = D м , d´ = D´ м , получим:
D м = ( √ ( 1 - ( v⁄w)²) ) × D´ м´
(7)
Соотношение ( 7 ) позволяет сделать предположения: или м = м´ , или D = D´ .
В таком случае из соотношения ( 7 ) получим либо отличную от известной из специальной
теории относительности [ 2 ] формулу
D = ( √ ( 1 - ( v⁄w)² ) ) × D´,
(8)
либо соотношение
м = ( √ ( 1 - ( v⁄w)² ) ) м´ .
( 9)
Если же воспользоваться условием w = w´ и тем , что w = W м ⁄ сек , w´ = W´ м´⁄ сек´ и
положить , в частности , сек = сек´, W´ ⁄ W = ( 1 - ( v⁄w )² ) , м = ( 1 - ( v⁄w )² ) м´ , то
получим известную из теории относительности формулу :
D´ = ( √ ( 1 - ( v⁄w )² ) ) × D.
( 10 )
Если считать, что основной будет система координат (х´ , у´ ) , v´ считать скоростью начала
координат ( х,у ) по отношению к основной системе координат , то , по аналогии c ( 5 ),
получим формулу:
Т = Т´⁄ ( √( 1 - ( v⁄w)²)).
( 11 )
Аналогично, в этом случае следует изменить и формулы ( 6 ) - ( 9 ).
Аналогичным образом будем иметь соотношения ( 1 ) - ( 11 ) при проведении
экспериментов когда платформы находятся под некоторым углом к горизонтали, мачты перпендикулярны горизонтали или под некоторым углом к вертикали, подвижная платформа
движется поднимаясь как бы в гору со скоростью v . Точно также будем иметь соотношения
вида ( 1 ) - ( 11 ) когда платформы находятся в горизонтальной плоскости, а мачты уложены
на платформы.
Все предыдущие рассуждения проводились нами в кинетическом пространстве.
Рассмотрим кинематическое пространство ( x, t ) , в котором исследуем эксперимент , когда
одна из платформ движется с постоянной скоростью в горизонтальной плоскости , а скорость
платформы и ядра совпадают по направлению. В кинематике, как известно, изучается
движение материальной точки при введение дополнительной координаты. В качестве
дополнительной координатной прямой берется время, причем считается ( хотя это никак не
оговаривается ), что это такая же координата что и пространственная. Однако , известно, что
время имеет особенность: время всегда движется , течет. По этой причине введем в
рассмотрение новую пространственную координату x₀ , связанную с координатой время
соотношением
x₀ = v₀ × t .
При таком подходе, при известных значениях x₀ и v₀ всегда можно вычислить время t .
При этом приобретается пространственная координата, по которой с постоянной скоростью
v₀ движется инерциальная система координат (x₀ , x₀´) , одновременно двигаясь и вдоль
оси Оx с постоянной скоростью v. Тогда вместо кинематического пространства ( x ,t )
получим кинетическое пространство с двумя инерциальнными системами координат ( Рис. 2
).
x₀
x₀´
М
М´
•S(x,x₀)
v´×t
А
О´
А´
x´
w´×t´
v₀´
v₀ В
О
С
v
В´
w
v×t
x
w×t
Рис. 2.
Положим как обычно v₀ = v₀´ , v = v´ , w = w´, а также v₀ = w. Для данной системы будут
справедливы формулы ( 1 ) - ( 10 ), из которых , в частности , следует:
d² = ( v₀×t )² - ( v×t )² = ( v₀´×t´ ) - ( v´×t´ )² = d´²,
( 12 )
d = v₀ × t,
( 13 )
d = v₀× t = v₀×√ ( 1 - ( v⁄v₀ )² ) × t´,
t = √ ( 1 - ( v⁄v₀ )² ) × t´.
( 14 )
( 15 )
Далее, из условия, что расстояние СВ´ измеренное основным наблюдателем Н
помноженное на √ ( 1 - ( v⁄v₀)² ) будет равно расстоянию О´А´, измеренному
наблюдателем Н´ , получим :
√ ( 1 - ( v⁄v₀)²) × x´ = x - v×t.
Эта формула , как известно представляет собой одну из формул преобразования Лоренса
x´ = ( x - v ×t ) ⁄ ( √( 1 - ( v⁄v₀)² ) )
( 16 )
при v₀ равной одному метру в секунду.
В следствие того, что
отрезки ОМ и ОМ´ связаны условием
ОМ = ( √ ( 1 - (v⁄v₀)²) ) × ОМ´,
получил формулу для пересчета координат x₀´ и x₀ :
x₀ = ( √
( 1 ( v⁄v₀)² ) ) × x₀´ + ( √ ( 1 - ( v⁄v₀)² ) ) ×t´ × v₀´,
x₀´ = ( x₀ - t×v₀ ) ⁄ ( √ ( 1 - ( v⁄v₀)² )).
( 17 )
Рассмотрим эксперимент когда платформа движется с постоянной скоростью v под
некоторым заданным углом к горизонтали ( как бы в гору ) и по ходу движения платформы
ядро движется с постоянной скоростью w . Будем считать, что координатная прямая Оx
находится на самой горизонтали. Из координатной системы ( x , t ) перейдем к системе
координат ( x , x₀ ) Рис. 3 .
x₀
М x₀
М´
w´×t´
D
x´
А´
А
О´
𝛼
v₀xt
β
v₀´
v₀
w´×t´
v´×t´
v´
E
x´
w´
С
О
F
v
v×t В
L
w
Рис. 3.
w×t
В´
x
Из приведенного рисунка найдем , что справедливы формулы ( 1 ) - ( 15 ). Для получения
формул преобразования воспользуемся условием О´D = СЕ = ОЕ - ОС. Учитывая, что
длины отрезков из - за измерений в разных системах отсчета подчиняются условию:
СЕ × √ ( 1 – ( v⁄v₀)² ) = LF . Теперь также можем записать:
x´ = ( x - v×t ) ⁄ ( √ ( 1 - ( v⁄v₀)² )).
Аналогичным образом для координатных осей Оx₀ и О´x₀´ , считая, что некая точка имеет на
оси О´x₀´ координату равную отрезку О´ М запишем:
ОМ = ( √ ( 1 - ( v⁄v₀ )² ) ) × ОМ´,
x₀´ = ( x₀ - v₀×t ) ⁄ √ ( 1 - ( v⁄v₀ )² ).
Предположим, в частности, что на рисунке угол 𝛼 равен углу β.
Тогда, координатная оси Оx´ , Оx₀´ описываются соответственно уравнениями
x₀ = ( v⁄v₀ ) × x ,
x = ( v⁄v₀ ) × x .
Воспользуемся теперь условием ( АА´ ⁄ СВ ) = ( ОА ⁄ ОВ ), тогда можем записать
v₀×t = ( v⁄v₀ ) × x.
Следовательно, получим из ( 17 ) следующую формулу преобразования Лоренса:
x₀´ = ( x₀ - v₀ × ( v⁄v₀² ) × x ) ⁄√ ( 1 - ( v⁄v₀)² )
( 18 )
Из формулы ( 18 ) можно перейти к преобразованию для пересчета времени t в t´.
Если положить v₀ = w = с , где с - скорость света измеренная ( или принятая ) в основной
системе отсчета. Тогда следует скорость света с положить равной скорости света с´ и
считать, что в любой инерционной системе отсчета собственная скорость света всегда
одинакова и записать:
с = С м⁄сек = с´ = С´ м´⁄сек´.
С другой стороны, следует заметить, что мы не можем просто перенести материальную
точку в будущее время, а только перейти к ней за счет равномерного движения по времени
системы отсчета ( x´ , x₀´ ). Заметим также, что о прошлом мы знаем, потому что в
кинематике строится траектория движения точки по координате времени. Поэтому видится
целесообразным, что имеется возможность в момент времени t воспринять воздействие из
прошлого и оказаться в области причинной механики [ 3 ] . Если считать, что из прошлого
ничего не может воздействовать, то воздействие будет мгновенным и мы приходим к
области классической механики. Находясь в кинематическом пространстве ( x´ , x₀´ ) будем
иметь, что x₀´ = 0 для материальной точки.
Далее отметим, что при x₀´ = 0 из
кинематического пространства ( x´ ,x₀´) получим обычное кинетическое пространство
( x´ , 0 ) , в котором все происходит в режиме «сейчас «.
Если положить, что точка S ( x , x₀ ) есть не положение материальной точки в
пространстве – времени, а событие, которое может происходить в любой точке
координатных пространств ( x , x₀) и ( x´ , x₀´ ), то преобразования ( 16 ) , ( 18 ) будут
соответствовать преобразованиям Лоренса. Преобразования ( 16 ), ( 17 ), повидимому,
следует принять как более общие - преобразованиями Галилея.
ЛИТЕРАТУРА
1. Яглом И.М, Принцип относительности Галилея и неевклидова геометрия. – М. «НАУКА»,
1969.
2. Угаров В.А. Специальная теория относительности. - М. «НАУКА», 1969.
3. КозыревН.А. Причинная или несимметричная механика в линейном приближении. – Л.;
Пулково, 1958.