ИСПОЛЬЗОВАНИЕ ПРОГРАММЫ MATHCAD ПРИ
реклама

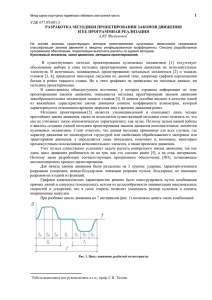
Преподавание ТММ УДК 621.01 В. М. ТРЕТЬЯКОВ ИСПОЛЬЗОВАНИЕ ПРОГРАММЫ MATHCAD ПРИ ОПРЕДЕЛЕНИИ СКОРОСТЕЙ И УСКОРЕНИЙ РЫЧАЖНЫХ МЕХАНИЗМОВ Графические и графоаналитические методы широко используются при изучении теории механизмов и машин не только в силу их наглядности, но и вследствие того, что они развивают у студентов инженерную интуицию, позволяющую оценивать кинематические возможности механизма по его кинематической схеме. Для контроля результатов, полученных при использовании планов скоростей и ускорений, целесообразно иметь средства, позволяющие быстро провести аналитический расчет кинематических параметров. В [1] предложен аналитический метод решения задачи определения скоростей и ускорений, при котором сохраняется последовательность действий, используемая при графоаналитическом решении. Это приводит к применению отличающихся по форме систем уравнений, отражающих разные свойства и отношения исследуемых векторов, требует привлечения дополнительных знаний из аналитической геометрии, что в итоге усложняет расчет. В статье рассмотрен векторный способ решения задач кинематического анализа механизмов, основанный на использовании метода векторных многоугольников и теоремах о скоростях и ускорениях точек твердого тела. При расчете сначала определяются положения звеньев, затем характеристики их вращательного движения, а по ним скорости и ускорения точек. В качестве примера рассмотрен кинематический анализ механизма, данные о котором приведены в [1]. Его кинематическая схема показана на рис. 1. Рис. 1. Кинематическая схема шарнирного четырехзвенника Исходные данные [1]: 1 10 с-1, l AB 0,1 м, lBC 0,3 м, lCD 0, 25 м, l AD 0, 2 м, 0 0 , значение обобщенной координаты 1 30 . Звеньям механизма сопоставим соответствующие вектора l0 , l1 , l2 и l3 (рис. 2). Модули векторов равны длинам звеньев l1 l AB , l2 lBC , l3 lCD , l0 l AD . 40 http://tmm.spbstu.ru Использование программы Mathcad при определении скоростей … Рис. 2. Векторный многоугольник шарнирного четырехзвенника Векторы l0 и l1 , модули и ориентация которых известны, необходимо представить в виде: l1 cos 1 l0 cos 0 l0 l 0 sin 0 , l1 l1 sin 1 . 0 0 (1) Аналогично это будет выглядеть и в программе MathCAD. Здесь и далее запись вида lx l ly l z следует понимать как вектор l l x i l y j l z k , где i, j, k – орты осей координат. Вектор угловой скорости кривошипа в проекциях на оси координат 0 1 0 . 1 Скорость точки B найдем по формуле: VB 1 l1 . В программе MathCAD это будет выглядеть следующим образом: 0 0.5 1 0 Vb : 1 l1 Vb 0.866 Vb 1 . 10 0 Для определения скоростей других точек звеньев механизма необходимо найти положения векторов l 2 и l3 . Воспользуемся уравнением замкнутости векторного многоугольника, показанного на рис. 2. Теория Механизмов и Машин. 2009. №2. Том 7. 41 Преподавание ТММ l1 l2 l0 l3 , l 2 l BC , l3 lCD . (2) Это векторное уравнение может быть решено с помощью вычислительного блока Given/Find [2], для чего необходимо задать начальные значения проекций векторов l2 и l3 на оси координат (3). Кроме того, уравнение замкнутости векторного многоугольника необходимо дополнить уравнениями, определяющими длины данных векторов (2): 1 1 l2 1 , l3 1 . 0 0 (3) В программе MathCAD определение векторов l 2 и l3 будет выглядеть следующим образом: 1 1 l2 : 1 , l3 : 1 0 0 Given l1 l2 = l0 l3 l2 = lBC l3 = lCD : Find(l2 , l3 ) 3.1 l : 0 l3 : 1 3.1 2 0.087 0.257 0.144 0.2 l1 0.05 l2 0.155 l3 : 0.205 l0 : 0 . 0 0 0 0 Векторы l0 и l1 найдены по формулам (1). Скорость точки С определяется из векторного уравнения: VC VB VCB . (4) Выразив скорости, входящие в (4), через заменяющие векторы звеньев и угловые скорости, получим уравнение 3 l3 VB 2 l2 . В этом уравнении неизвестны модули векторов 2 и 3 , которые также можно найти с помощью вычислительного блока Given/Find. 42 http://tmm.spbstu.ru Использование программы Mathcad при определении скоростей … Перед решающим блоком заданы начальные значения проекций векторов 2 и 3 на оси координат. Используя векторные выражения, найдем требуемые скорости точек звеньев: VС 3 l3 , VСB 2 l2 . В программе MathCAD это будет выглядеть следующим образом: Зная проекции векторов на оси координат, легко определить углы между найденными векторами и осями. Перейдем к определению ускорений точек. Ускорение точки B находим по формуле: аB 1 VB . Соответствующий фрагмент в MathCAD имеет вид: Теория Механизмов и Машин. 2009. №2. Том 7. 43 Преподавание ТММ Для определения ускорения точки C используем векторные уравнения n aC aB aCB aCB , n aC a D aCD aCD . (5) Приравняв правые части, заменим (5) одним уравнением. Выразив ускорения через заменяющие векторы звеньев, угловые скорости и угловые ускорения получим уравнение для определения кинематических характеристик вращательного движения звеньев: n n aCD aCD aB aCB aCB . После замены получим 3 VC 3 l3 aB 2 VCB 2 l2 . Опять используем вычислительный блок Given/Find, чтобы найти модули угловых ускорений: Перед решающим блоком заданы начальные значения проекций векторов 2 и 3 на оси координат. Используя векторные выражения, найдем требуемые ускорения. Ускорения точки С : aC 3 l3 , aCn 3 VC , a C aCn aC . 44 http://tmm.spbstu.ru Использование программы Mathcad при определении скоростей … В программе MathCAD это будет выглядеть следующим образом: Ускорения точки С относительно B : n n aCB 2 l2 , aCB 2 VCB , aCB aCB . aCB Соответствующий фрагмент в MathCAD имеет вид: Задавая различные значения обобщенной координаты 1 механизма, можно получить полную картину изменения кинематических параметров за один оборот начального (входного) звена. Таким образом, решение задач кинематического анализа механизмов на основе использования метода векторных многоугольников и угловых скоростей позволяет осуществить проверку результатов, полученных методом планов скоростей и ускорений, использующим классические формулы теоретической механики и теории механизмов и машин. Предложенный метод прост и использует единообразные по форме математические выражения. Используя графические возможности программы MathCAD, можно построить кинематическую схему механизма в заданном положении, план скоростей и план ускорений. На рис. 3 и рис. 4 показан один из двух возможных вариантов сборки рассматриваемого механизма. Полюсы плана скоростей и плана ускорений, приведенных на рисунках, совмещены с Теория Механизмов и Машин. 2009. №2. Том 7. 45 Преподавание ТММ входной кинематической парой начального (входного) звена механизма. Векторы скоростей показаны линиями, состоящими из точек, а векторы ускорений – штрихпунктирными линиями. Звено, векторы скорости и ускорения его точек имеют один цвет. Рис. 3. Кинематическая схема, планы скоростей и ускорений шарнирного четырехзвенника при 1 30 Для получения второго варианта сборки механизма необходимо изменить в (3) начальные значения проекций векторов l 2 и l3 на оси координат. В программе MathCAD определение векторов l 2 и l3 будет выглядеть следующим образом: 1 1 l2 : 1 , l3 : 1 0 0 Given l1 l2 = l0 l3 l2 = lBC l3 = lCD : Find(l2 , l3 ) 3.1 l : 0 l3 : 1 3.1 2 0.087 0.059 0.054 0.2 l1 0.05 l2 0.294 l3 : 0.244 l0 : 0 . 0 0 0 0 46 http://tmm.spbstu.ru Использование программы Mathcad при определении скоростей … Рис. 4. Кинематическая схема, планы скоростей и ускорений шарнирного четырехзвенника при 1 310 На рис. 5 и рис. 6 показаны результаты решения задачи о положениях, скоростях и ускорениях для второго варианта сборки механизма, показанного на рис. 1. Рис. 5. Кинематическая схема, планы скоростей и ускорений второго варианта сборки шарнирного четырехзвенника при Теория Механизмов и Машин. 2009. №2. Том 7. 1 30 47 Преподавание ТММ Рис. 6. Кинематическая схема, планы скоростей и ускорений второго варианта сборки шарнирного четырехзвенника при 1 310 СПИСОК ЛИТЕРАТУРЫ 1. 2. Зиборов К.А. Решение векторных уравнений кинематики механизмов с помощью программы Mathcad / К.А. Зиборов, И.Н. Мацюк, Э.М. Шляхов // Теория механизмов и машин. 2008. №1(11). С. 64-70. Кирьянов Д.В. Mathcad 14 / Д.В. Кирьянов. – СПб.: БХВ – Петербург, 2007. – 704 с. Поступила в редакцию 29.04.2009 48 http://tmm.spbstu.ru