Составитель Редактор А.В. Гусенков
реклама

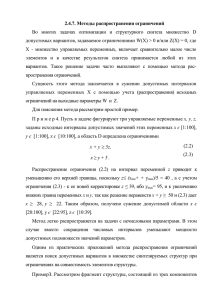
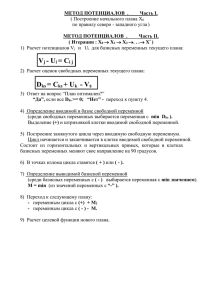
Составитель О.В. Фролова Редактор А.В. Гусенков Методические указания предназначены для студентов специальности 140203 «Релейная защита и автоматизация электроэнергетических систем» Утверждены цикловой методической комиссией ЭЭФ Рецензент кафедра «Автоматическое управление электроэнергетическими системами» ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина» РЕШЕНИЕ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ СИМПЛЕКС-МЕТОДОМ Методические указания к лабораторной работе Составитель ФРОЛОВА Ольга Васильевна Редактор Н.Б. Михалева Лицензия ИД №05285 от 4.07.2001 г. Подписано в печать Формат 60х84 1/16 Печать плоская. Усл.печ.л. 1,86. Тираж 100 экз. Заказ ГОУВПО «Ивановский государственный энергетический университет им. В.И. Ленина» 153003, г. Иваново, ул. Рабфаковская, 34. Отпечатано в РИО ИГЭУ СОДЕРЖАНИЕ 1. ЦЕЛЬ РАБОТЫ…………………………………………... 4 2. АЛГОРИТМ СИМПЛЕКС-МЕТОДА РЕШЕНИЯ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ……... 4 3. РЕШЕНИЕ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ ПРОГРАММЫ, РЕАЛИЗУЮЩЕЙ СИМПЛЕКСМЕТОД………………………………………………………. 13 4. ВЫПОЛНЕНИЕ ЛАБОРАТОРНОЙ РАБОТЫ ПО РЕШЕНИЮ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ СИМПЛЕКС-МЕТОДОМ......... 20 ПРИЛОЖЕНИЕ. ВАРИАНТЫ ЗАДАНИЙ НА ЛАБОРАТОРНУЮ РАБОТУ…..……………………… 3 21 1. ЦЕЛЬ РАБОТЫ Цель лабораторной работы – изучение принципов составления математической модели задачи линейного программирования, алгоритма симплекс-метода, решение задачи с помощью программы, реализующей симплексметод. 2. АЛГОРИТМ СИМПЛЕКС-МЕТОДА РЕШЕНИЯ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ Характеристика задач, которые можно решать с помощью методов линейного программирования, сводится к следующему: 1) функция цели – линейная комбинация искомых переменных: F c1 x1 c2 x2 ... cn xn . (1) 2) система ограничений – также в виде линейных комбинаций переменных (равенств или неравенств): a11 x1 ... a1n x1n b1; a21 x1 ... a2 n xn b2 ; .............................. am1 x1 ... amn xn bm , где (2) bi 0, i (1,..., m); x j 0, j (1, , n). Часть ограничений в (2) может быть представлена в виде неравенств 4 ai1 x1 ... ain xn bi . (3) В этом случае неравенство заменяется равенством ai1 x1 ... ain xn ain1 xn1 bi . (4) Знак минус при ain1 взят с учетом того, что левая часть выражения (3) больше правой ( bi ). Данный прием позволяет свести ограничения типа неравенств (3) к ограничениям типа равенств (2). Решение задачи может быть найдено следующим образом: произвольным образом выбираются m переменных, а оставшиеся n m переменных приравниваются к нулю. Решается система (2). Полученное решение называется базисным, а m переменных – базисными. Остальные n m переменных называются свободными; полученное базисное решение называют допустимым, если удовлетворяются условия неотрицательности переменных x j 0 . В противном случае решение недопустимо, и необходимо выбрать новые m базисных переменных; базисному допустимому решению соответствует определенное значение функции цели (1); если найти все допустимые решения и для каждого определить F по (1), то можно найти минимум и максимум функции цели. Рассмотренный алгоритм является весьма трудоемким из-за перебора большого числа базисных решений. Симплекс-метод упорядочивает перебор базисных решений в целях минимизации (максимизации) функции цели. 5 Этапы решения поставленной задачи симплексметодом: а) записать задачу в виде системы (2) и целевой функции (1); б) найти допустимое базисное решение; в) проверить при полученном базисном решении, не достигнут ли минимум (максимум) функции цели; г) если минимум (максимум) не достигнут, перейти к новым базисным переменным и к пункту «б». Если решение существует, оно будет найдено за конечное число шагов. Пример. Найти минимум целевой функции x1 0, x2 0 . F x2 x1 (5) при наличии ограничений 2 x1 x2 x3 2; x1 2 x2 x4 2; x1 x2 x5 5. (6) Степень неопределенности (р) системы (6) p n m 5 3 2, где (7) n - число переменных; m - число уравнений (число базисных переменных). При p 2 (число свободных переменных) задача может быть изображена на плоскости. Произвольным образом в качестве базисных переменных примем x3 , x4 , x5 : 6 x3 2 2 x1 x2 ; x4 2 x1 2 x2 ; x5 5 x1 x2 . (8) Условие xi 0 i 1,...,5 определяет пять уравнений прямых, каждая из которых делит плоскость x1 , x2 на две полуплоскости допустимую и недопустимую (рис. 1): x1 0 , прямая x1 0; x2 0, прямая x2 0; x3 0, прямая 0 2 2 x1 x2 из (8); x4 0, прямая 0 2 x1 2 x2 из (8); x5 0, прямая 0 5 x1 x2 из (8). X2 X1=0 Область допустимых решений C F X4=0 B D X3=0 X2=0 A E X1 X5=0 Рис.1. Графическое изображение области допустимых решений На рис. 1 штриховкой показана допустимая полуплоскость. F - одно из положений прямой (5), где стрелкой показано движение F к области допустимых значений. 7 Данный рисунок позволяет утверждать, что минимум функции цели лежит в одной из вершин области допустимых решений (пересечение двух прямых, задающих величину) и определяет две свободные переменные Ax1 0, x2 0; Bx1 0, x3 0; C x3 0, x5 0; Dx4 0, x5 0; Ex2 0, x4 0 . Для выбранного базисного решения (8) при x1 0, x2 0 (точка А) x3 2; x4 2; x5 5. (9) Условие неотрицательности переменных выполняется. Функция цели F 0 . Является ли это решение минимальным? Анализ знаков коэффициентов при x1 и x2 в (5) показывает, что при отрицательном коэффициенте при x1 (1) увеличение x1 x1 0 приведет к уменьшению F . Увеличение x1 ограничивается уравнениями для x4 и x5 в системе (8). Если x1 2 , то x4 становится отрицательным, если x1 5 , то x4 и x5 становятся отрицательными, следовательно, x1 можно увеличить до 2. При этом x4 0 , следовательно, теперь x2 0 , x4 0 , т.е. осуществлен выбор новых свободных переменных (переход в точку Е). Новое базисное решение: x1 2 x4 2 x2 ; x3 2 2 (2 x4 2 x2 ) x2 6 3x2 2 x4 ; x5 5 2 x4 2 x2 x2 3 3x2 x4 . 8 (10) Функция цели для новых свободных переменных F x2 2 x4 2 x2 2 x2 x4 (11) равна -2 при x2 x4 0. Дальнейшее уменьшение F возможно при увеличении x2 . Рост x2 ограничивает (до 1) уравнение для x5 системы (10). Следовательно, новое базисное решение (точка D): 1 1 x2 1 x5 x4 ; 3 3 1 1 x3 6 3 (1 x5 x4 ) 2 x4 9 x5 x4 ; 3 3 1 1 1 2 x1 2 x4 2 (1 x5 x4 ) 4 x4 x5 . 3 3 3 3 (12) Функция цели для свободных переменных x4 и x5 1 1 1 2 F 2 1 x5 x4 x4 3 x5 x4 . 3 3 3 3 F 3; x4 0; x5 0. (13) Положительные коэффициенты при x4 и x5 показывают, что дальнейшее уменьшение F невозможно и F 3 искомое минимальное значение. Для поиска максимального значения функции цели достаточно умножить на -1 коэффициенты при переменных в исходной функции цели (1). В рассмотренном примере для поиска максимума функции цели (5) будет иметь вид 9 F x1 x2 . (14) Для поиска первого допустимого решения может быть использован ряд способов. Ниже рассмотрен один из способов, позволяющий найти решение задачи в табличной форме. Исходную задачу, но с поиском максимума, запишем в следующем виде: F ' 0 ( x1 x2 ); x3 2 (2 x1 x2 ); x4 2 ( x1 2 x2 ); x5 5 ( x1 x2 ). (15) Матрицу коэффициентов системы представим в виде табл. 1, а (левые верхние клетки табл. 1, а). Таблица 1. Матрица коэффициентов системы 1 X1 0 -1 2 2 -2 2 1 -2 а) 2/3 1/3 9 1 1 2/3 4 1/3 2/3 1 -1 3 -1/3 1/3 1 -1/3 1/3 1/3 -3 1 -1 1 3 2 3 -1 -1/3 2 2 -2 1 -1 X5 3 2 -2 1 X4 1 -4 X2 1 1 6 1 1 2 5 -2 2 X4 2 1 1 4 1 X2 -2 -2/3 б) 10 в) Анализ коэффициентов первого столбца (кроме первого) показывает, что взятое базисное решение является допустимым, так как все коэффициенты положительны (2,2,5). Поскольку в первой строке коэффициент при переменной x1 отрицателен (-1), оптимальное решение не найдено. Столбец с отрицательным коэффициентом при xi выделяется. Определяется, какую из базисных переменных сделать свободной. Очевидно, ту, которая быстрее обратится в нуль при увеличении x1 . В нашем примере – это x4 . Строка коэффициентов для базисной переменной x4 выделяется. Коэффициент в выделенной клетке называется генеральным. Величина, обратная генеральному коэффициенту, обозначается λ. В нашем примере λ=1/1=1. Заполняются нижние правые углы клеток по следующему алгоритму: в выделенной клетке записывается λ; в клетках выделенной строки записываются коэффициенты, равные произведению верхнего коэффициента на λ (кроме генерального); в клетках выделенного столбца записываются коэффициенты, равные произведению верхнего столбца на –λ (кроме генерального); в остальных клетках записываются коэффициенты, равные произведению выделенных коэффициентов (обведены), на пересечении которых стоит данная клетка. Затем заполняются клетки табл. 1,б, в которой свободная переменная x1 стала базисной, а x4 – свободной. Верхние левые клетки табл. 1,б заполняются по следующему алгоритму: 11 cтроку и столбец новых базисной и свободной переменных заполняют нижними коэффициентами выделенных строки и столбца табл. 1,а; в остальных клетках записываются коэффициенты, равные сумме верхних и нижних коэффициентов табл. 1,а. Табл. 1,б соответствует новому базису x1 , x3 , x5 . Далее процедура повторяется. Достигнутое решение отображается в табл. 1,в, где коэффициенты при свободных переменных x4 , x5 в первой строке положительны. Свободный член первой строки дает максимальное значение F ' 3. Получение начального допустимого базисного решения при большом числе переменных является самостоятельной, достаточно сложной задачей. Общий вид системы (2) можно записать в виде nm xi ' aij x j " ai 0 , j 1 ( 16) где ai 0 0, i 1,..., m. В такой форме xi ' - переменная, принятая за базисную, и ai 0 - свободный член должны иметь одинаковые по знаку коэффициенты, что соответствует неотрицательности базисной переменной. Коэффициент при xi ' в (16) равен единице, так как, если он не равен единице, на него всегда можно разделить уравнение (16). Если такие переменные найдутся в каждом из m уравнений, они и составят допустимое базисное решение. В случае, когда в некоторых уравнениях таких переменных нет, их вводят искусственно. Обозначим переменные, которые могут быть выбраны из (16) в качестве базисных, x1 ' ,...x5 ' , s m . 12 В остальные m s уравнений вводим искусственные базисные переменные xK ' , K s 1,..., m, налагая на них условие xK 0 . Тогда система (16) примет вид j 1 ns x K ' a Kj x j " a K 0 , K s 1,..., m. j 1 ns xi ' aij x j " ai 0 , i 1,..., s, (17) Искусственные переменные xK ' должны входить и в функцию цели, но практически не влиять на неё. Это обеспечивается введением их в функцию F ' с много большими по модулю, чем у остальных переменных, коэффициентами, взятыми с отрицательным знаком. 3. РЕШЕНИЕ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ ПРОГРАММЫ, РЕАЛИЗУЮЩЕЙ СИМПЛЕКСМЕТОД Задана целевая функция в виде линейной комбинации переменных F x1 x2 . ( 18) Ограничения, накладываемые на переменные x1 и x2 , заданы графически многоугольником допустимых решений (рис. 2). 13 X2 B 5 4 3 X4 0 C X3 0 X5 0 A X7 0 2 D X6 0 1 E X1 1 2 3 4 5 6 Рис. 2. График области допустимых решений Необходимо найти неотрицательные значения переменных x1 и x2 , удовлетворяющих системе ограничений и придающих минимум или максимум целевой функции (18). Каждая прямая на графике делит плоскость x1 x2 на две полуплоскости. Координаты точек одной из этих полуплоскостей могут являться допустимыми решениями задачи. Совместно прямые образуют многоугольник допустимых решений. Поэтому, чтобы получить систему ограничений, сначала необходимо записать уравнения соответствующих прямых: прямая – AB x2 2 x1 1 ; прямая – BC x2 5 ; прямая – CD 3 x1 x2 20 ; прямая – DE x1 2 x2 2 ; прямая – AE 2 x1 3 x2 11 . 14 Систему ограничений можно записать, определив координаты точек полуплоскости, удовлетворяющие решению (19): x2 2 x1 1; x2 5; 3 x1 x2 20; x1 2 x2 2; 2 x1 3 x2 11. (19) Таким образом, математическую модель задачи линейного проектирования составят функция цели (18), система ограничений (19) и условие неотрицательности переменных x1 0 и x2 0 . Система ограничений приводится к каноническому виду путем введения дополнительных неотрицательных переменных. Тогда неравенства (19) могут быть преобразованы в равенства (20): x2 2 x1 x3 1; x2 x4 5; 3 x1 x2 x5 20; x1 2 x2 x6 2; 2 x1 3 x2 x7 11. (20) Знак минус при x7 взят с учетом того, что левая часть последнего неравенства больше правой. В функцию цели дополнительные переменные войдут с коэффициентом, равным 0. Получится пять уравнений (m=5) относительно семи неизвестных (n=7). Степень неопределенности p n m 2 . 15 Прежде чем найти опорное решение, необходимо составить систему общего решения. Для этого система уравнений (20) преобразуется к виду x3 1 2 x1 x2 ; x4 x5 x6 x7 5 x2 ; 20 3 x1 x2 ; 2 x1 2 x2 ; 11 2 x1 3 x2 . (21) Для получения общего решения необходимо, чтобы каждая базисная переменная входила только в одно из уравнений системы. В системе (21) x3 , x4 , x5 , x6 , x7 являются базисными переменными, x1 и x2 - свободными переменными. x1 и x2 могут принимать произвольные значения. С учетом неотрицательности решения задачи линейного программирования система уравнений относительно базисных переменных имеет вид x3 1 2 x1 x2 0; x4 x5 x6 x7 5 x2 0; 20 3 x1 x2 0; 2 x1 2 x2 0; 11 2 x1 3 x2 0. (22) Эта система неравенств определяет множество свободных переменных ( x1 , x2 ), каждому из которых должна соответствовать совокупность неотрицательных базисных переменных. В полученной системе (22) нельзя задать 16 x1 0 , x2 0 , так как при этом x7 11 0 (на рис. 2 точка с координатами x1 0 , x2 0 не является допустимым решением). Поэтому в качестве базисных выбираются переменные x1 , x2 , x5 , x6 , x7 , тогда свободные переменные – x3 и x4 . x1 2 0,5 x3 0,5 x4 ; x2 5 x4 ; x5 9 1,5 x3 2,5 x4 ; x6 10 0,5 x3 1,5 x4 ; x7 8 x3 4 x4 . (23) В системе (24) при задании xсв 0 ( x3 0 , x4 0 ) выполняется условие неотрицательности базисных переменных: x1 2 0,5 x3 0,5 x4 0; x2 5 x4 0; x5 9 1,5 x3 2,5 x4 0; x6 10 0,5 x3 1,5 x4 0; x7 8 x3 4 x4 0. (24) Каждому решению ( x3 , x4 ) системы неравенств (24) соответствует допустимое решение рассматриваемой задачи линейного проектирования. Из множества допустимых решений интересны опорные решения, так как оптимальное решение совпадает с одним из опорных решений, соответствующих вершинам многоугольника допустимых решений. Каждая вершина многоугольника допустимых решений (рис.2) является пересечением p 2 прямых из сово17 купности (23). Учитывая, что на любой из этих прямых соответствующая базисная неизвестная равна нулю, можно утверждать, что в каждой вершине многоугольника p 2 неизвестных обращаются в нуль. Таким образом, чтобы найти опорное решение, необходимо сначала сформулировать неотрицательное общее решение системы, а затем положить в этом решении xсв 0 . Для решения задачи на ЭВМ необходимо выполнить следующее: представить ограничения в виде допустимого базисного решения; выразить функцию цели через свободные переменные (26). Находится новое выражение для функции цели через свободные переменные x3 , x4 . (25) F x1 x2 2 0,5 x3 0,5 x4 5 x4 ; F 7 0,5 x3 1,5 x4 . (26) Рассмотренный пример записывается в следующем виде: F 7 (0,5 x3 1,5 x4 ); x1 2 ( 0,5 x3 0,5 x4 ); x2 5 (0 x3 1 x4 ); x5 9 (1,5 x3 2,5 x4 ); x6 10 (0,5 x3 1,5 x4 ); x7 8 (1 x3 4 x4 ). В программу вводятся: число переменных ( n 7 ); число ограничений ( m 5 ); индексы свободных переменных (3, 4); 18 (27) индексы базисных переменных (1, 2, 5, 6, 7); матрица коэффициентов 7 -0,5 1,5 2 -0,5 0,5 5 0 1 9 1,5 -2,5 10 0,5 1,5 8 -1 4 Протокол расчета программы «Симплекс-метод линейного программирования» Преобразованная матрица 4 1 3 14 7 2 -0,125 -0,375 0,25 0,875 0,875 -0,25 -0,375 -0,125 -0,25 0,625 -0,375 0,25 Fmin 4 ; x1 1 ; x2 3 ; x5 14 ; x6 7 ; x7 2 ; x3 x4 0 . Таким образом, неотрицательные значения переменных, удовлетворяющих системе ограничений (19) и придающих минимум целевой функции (18), будут соответственно равны x1 1 ; x2 3 . Минимальное значение целевой функции Fmin 4 . Для поиска максимального значения функции цели достаточно умножить на -1 коэффициенты при переменных в исходной функции цели (18), а затем выразить ее через новые свободные переменные. 19 4. ВЫПОЛНЕНИЕ ЛАБОРАТОРНОЙ РАБОТЫ ПО РЕШЕНИЮ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ СИМПЛЕКС-МЕТОДОМ Для выполнения лабораторной работы воспользуйтесь соответствующим вариантом в приложении. Задание лабораторной работы состоит из двух задач: 1. Необходимо найти неотрицательные значения переменных, удовлетворяющие многоугольнику допустимых решений и придающие минимальное значение целевой функции, приведенной в соответствующем варианте. 2. Необходимо найти неотрицательные значения переменных, удовлетворяющие многоугольнику допустимых решений и придающие максимальное значение целевой функции, приведенной в соответствующем варианте. Задание выполняется в следующей последовательности: по многоугольнику допустимых решений, указанном в варианте задания, составляется система неравенств – система ограничений; записывается математическая модель задачи; находится общее решение задачи линейного программирования; находится одно из опорных решений; с помощью программы, реализующей симплексметод, определяется минимальное значение функции цели при наличии ограничений и значения переменных; определяется максимальное значение функции цели при наличии ограничений и значения переменных; графическим методом производится проверка найденных решений. 20 ПРИЛОЖЕНИЕ ВАРИАНТЫ ЗАДАНИЙ НА ЛАБОРАТОРНУЮ РАБОТУ Вариант 1 Функция цели F 2 x1 x2 . (П1) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П1. Графическое задание области допустимых решений для варианта 1 21 Вариант 2 Функция цели F x1 3 x2 . (П2) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П2. Графическое задание области допустимых решений для варианта 2 Вариант 3 Функция цели F x1 x2 2 . (П3) X2 7 6 5 4 3 2 1 1 2 3 4 5 6 7 8 9 X1 Рис. П3. Графическое задание области допустимых решений для варианта 3 22 Вариант 4 Функция цели F x2 . (П4) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П4. Графическое задание области допустимых решений для варианта 4 Вариант 5 Функция цели F x2 2 x1 . (П5) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П5. Графическое задание области допустимых решений для варианта 5 23 Вариант 6 Функция цели F 2 x1 x2 . (П6) X2 7 6 5 4 3 2 1 1 2 3 4 5 6 7 8 9 X1 Рис. П6. Графическое задание области допустимых решений для варианта 6 Вариант 1 Функция цели F 1 x1 x2 . (П7) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П7. Графическое задание области допустимых решений для варианта 7 24 Вариант 8 Функция цели F x2 4 x1 . (П8) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П8. Графическое задание области допустимых решений для варианта 8 Вариант 9 Функция цели F x1 x2 . (П9) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П9. Графическое задание области допустимых решений для варианта 9 25 Вариант 10 Функция цели F x1 . (П10 ) 7 6 5 4 3 2 1 X1 1 4 2 5 6 7 8 9 Рис. П10. Графическое задание области допустимых решений для варианта 10 Вариант 11 Функция цели F x1 3 x2 1 . (П11 ) 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П11. Графическое задание области допустимых решений для варианта 11 26 Вариант 12 Функция цели F 4 2 x1 x2 . (П12 ) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П12. Графическое задание области допустимых решений для варианта 12 Вариант 13 Функция цели F x2 x1 . (П13 ) X2 7 6 5 4 3 2 1 1 2 4 5 27 6 7 8 9 X1 Рис. П13. Графическое задание области допустимых решений для варианта 13 28 Вариант 14 Функция цели F x1 x2 . (П14 ) X2 7 6 5 4 3 2 1 1 2 3 4 5 6 7 8 9 X1 Рис. П14. Графическое задание области допустимых решений для варианта 14 Вариант 15 Функция цели F x1 4 x2 . (П15 ) X2 7 6 5 4 3 2 1 1 2 3 4 5 29 6 7 8 9 X1 Рис. П15. Графическое задание области допустимых решений для варианта 15 Вариант 16 Функция цели F x1 x2 3 . (П16 ) 7 6 5 4 3 2 1 1 2 3 4 5 6 7 8 9 X1 Рис. П16. Графическое задание области допустимых решений для варианта 16 Вариант 17 Функция цели F 2 x1 x2 1 . (П17 ) X2 7 6 5 4 3 2 1 1 2 3 4 5 30 6 7 8 9 X1 Рис. П17. Графическое задание области допустимых решений для варианта 17 31 Вариант 18 Функция цели F 2 x1 . (П18 ) X2 7 6 5 4 3 2 1 1 3 2 4 5 6 7 X1 9 8 Рис. П18. Графическое задание области допустимых решений для варианта 18 Вариант 19 Функция цели F x1 x2 . (П19 ) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 32 6 7 8 9 Рис. П19. Графическое задание области допустимых решений для варианта 19 33 Вариант 20 Функция цели F 2 x1 x2 . (П20 ) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 9 8 Рис. П20. Графическое задание области допустимых решений для варианта 20 Вариант 21 Функция цели F 4 x1 x2 . (П21 ) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 34 6 7 8 9 Рис. П21. Графическое задание области допустимых решений для варианта 21 35 Вариант 22 Функция цели F 1,5 x1 x2 . (П22 ) X2 7 6 5 4 3 2 1 1 2 3 4 5 6 7 8 9 X1 Рис. П22. Графическое задание области допустимых решений для варианта 22 Вариант 23 Функция цели F x2 2 x1 1 . (П23 ) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 36 6 7 8 9 Рис. П23. Графическое задание области допустимых решений для варианта 23 37 Вариант 24 Функция цели F 2 x1 1,5 x2 . (П24 ) 7 6 5 4 3 2 1 X1 1 2 3 4 5 6 7 8 9 Рис. П24. Графическое задание области допустимых решений для варианта 24 Вариант 25 Функция цели F 2 x1 x2 3 . (П25 ) X2 7 6 5 4 3 2 1 X1 1 2 3 4 5 38 6 7 8 9 Рис. П25. Графическое задание области допустимых решений для варианта 25 39