(...В представленной на сайте версии готовой работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой курсовой
реклама

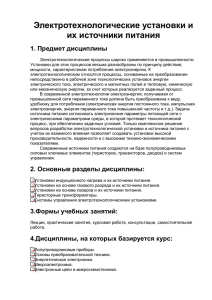
2 (...В представленной на сайте версии готовой работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой курсовой работы, обратитесь на www.diplomant-spb.ru ...) Способы регулирования тока и напряжения можно условно подразделить на два класса: регулирование с помощью делителя напряжения с переменным коэффициентом деления (рис.x,а); регулирование с помощью трансформатора (автотрансформатора) с переменным коэффициентом трансформации (рис.x,б). Регулируемый автотрансформатор Реостат Источник электропитания постоянного или переменного тока Нагрузка Рис.xа. Источник электропитания переменного тока Нагрузка Рис.xб. В первом случае работа возможна как в цепях переменного, так и постоянного тока, во втором – только в цепях переменного тока. При использовании делителя напряжения регулировка осуществляется изменением сопротивления одного из резисторов делителя – реостата. При этом напряжение на омической нагрузке UН определяется выражением UН = UИП·RН/(RН + RР), где UИП – напряжение источника питания, RН и RР – сопротивления нагрузки и реостата соответственно. Ток через омическую нагрузку IН определяется выражением IН = UИП /(RН + RР). При использовании регулируемого трансформатора (возможна плавная регулировка при использовании скользящего контакта к обмотке и ступенчатая регулировка и переключением отводов) напряжение на нагрузке (и, соответственно, ток через нагрузку) изменяется пропорционально коэффициенту трансформации. 3 Условия, определяющие выбор реостатов и трансформаторов – это мощность, рассеиваемая на реостате или передаваемая трансформатором, ток и напряжение на нагрузке, диапазон регулировки тока и напряжения. Достоинством регуляторов с реостатами является сравнительная простота устройства, основным недостатком – значительные потери мощности. Кроме того, если регулирование осуществляется на переменном токе при наличии значительной реактивной составляющей в нагрузке, возможно появление существенного фазового сдвига. Поэтому реостатное регулирование применяется главным образом на постоянном токе. Основным достоинством регулирования с помощью автотрансформатора является высокий КПД регулятора, основными недостатками – возможность работы только на переменном токе и сложность конструкции. Замечание: в некоторых случаях при работе на переменном токе в регуляторах по схеме делителя напряжения вместо реостата может применяться дроссель переменного тока с регулируемой индуктивностью (механическое регулирование путем изменения величины воздушного зазора в магнитном сердечнике или электрическое регулирование путем подмагничивания сердечника постоянным током). Такие регуляторы используются, например, для регулировки тока сварочных трансформаторов. Для измерения разности фаз между током и напряжением чаще всего применяют фазометры на основе логометрических электромеханических (электродинамических, ферродинамических и электромагнитных) измерительных механизмов. Логометры осуществляют вычислительную операцию деления двух электрических величин, являющихся, как правило, функциями других величин – как электрических, так и неэлектрических. Отклонение подвижной части измерительного механизма (ИМ) логометра будет пропорционально отношению двух электрических величин, если противодействующий момент создавать не пружиной, а таким же электромеханическим устройством, которое создает вращающий момент. В качестве примера рассмотрим электродинамический фазометр. Его устройство, схема включения и векторная диаграмма показаны на рис.x. 4 1 1' U 2' 2 I I y1 I2 I1 L I Нагрузка r I1 b y2 I2 Рис.x. Две неподвижные катушки x,x' расположены так, что между ними создается достаточно однородное магнитное поле. Подвижная часть состоит из двух жестко скрепленных между собой под некоторым углом катушек x и x', укрепленных на оси и расположенных в магнитнолм поле неподвижных катушек. Последовательно с катушкой x включено активное сопротивление r, а с катушкой x' – индуктивность L. Подвижные катушки образуют параллельную цепь фазометра. На подвижную часть ИМ действуют два момента, направленные встречно: ′ 𝜕𝑀𝑥,𝑥 𝐌𝑥 = 𝐼𝐼𝑥 cos 𝜓𝑥 𝜕𝛼 𝐌𝑥 = 𝐼𝐼𝑥 cos 𝜓𝑥 ′′ 𝜕𝑀𝑥,𝑥 𝜕𝛼 Здесь I – ток в цепи нагрузки, Ix, Ix – токи в цепях катушек x и x' соответственно, yx – угол сдвига между I и Ix, равный , yx – угол сдвига между I и Ix, M’x,x и M’’x,x – взаимные индуктивности между катушками x,x' и x и x,x' и x' соответственно. При равновесии подвижной системы моменты равны. Тогда 5 ′′ 𝜕𝑀𝑥,𝑥 𝐼𝑥 cos 𝜑 𝐼𝑥 cos(𝛽−𝜑) 𝜕𝛼 ⁄ ′ 𝜕𝑀𝑥,𝑥 = = 𝑓(𝛼) 𝜕𝛼 Здесь b – угол между Ix и Ix. Правая часть этого уравнения является функцией от угла поворота в случае, если производные от взаимных индуктивностей не равны. Если подобрать параметры подвижных катушек таким образом, что Ix = Ix, то считая, что b = const, получаем: = fx() или = fx(cos). Шкала прибора может быть проградуирована в единицах угла или cos. Подобного вида фазометры предназначены для работы только на одной частоте (например, xx Гц), так как с изменением частотыт изменяется реактивное сопротивление подвижных катушек и меняются амплитудные и фазовые соотношения между токами Ix и Ix. Чтобы существенно уменьшить влияние напряжения источника тока на результат измерения, в качестве измерительного механизма (ИМ) омметров используют логометры. r1 r2 E Rx R1 Рис.x. rx, rx – сопротивления рамок ИМ, Rx – постоянное сопротивление, Rx – измеряемое сопротивление. Логометры осуществляют вычислительную операцию деления двух электрических величин, являющихся, как правило, функциями других величин – как электрических, так и неэлектрических. Отклонение подвижной части измерительного механизма (ИМ) логометра будет пропорционально отношению двух электрических величин, если противодействующий момент создавать не пружиной, а таким же электромеханическим устройством, которое создает вращающий момент. 6 Зависимость вращающего момента МВ и противодействующего момента МП от угла поворота определяется выражением: МВ = Kxfx()Yxnx, МП = Kxfx()Yxnx где К – постоянный коэффициент, Y – входная электрическая величина, n – показатель степени, равны x или x, f () – некоторая функция угла отклонения . При установившемся отклонении подвижной части уравнение преобразования будет иметь вид: Yxnx / Yxnx = Kxfx() / Kxfx() Для того чтобы являлся функцией отношения входных величин, необходимо выполнить два условия: равенство показателей степени (nx = nx = n); отношение fx() / fx() должно зависеть от (fx() / fx() = fx()), что будет иметь место при различных fx() и fx(), в частности, при постоянной величине функции для одного из элементов. Конструктивно логометрический ИМ представляет собой сочетание двух электромеханических устройств с общей подвижной частью, на которую действуют два момента, направленные навстречу друг другу. В ИМ, требующих подвода тока к подвижной части, это осуществляется с помощью тонких металлических лент, называемых безмоментными подводками, создающими пренебрежимо малый момент. Благодаря этому подвижная часть логометра, когда он не включен в цепь, может занимать любое положение. На рис.x,а,б приведены две схемы включения приборов для измерения сопротивления. 7 UA A A Ix I RX Ux RВ U V IВ RA Ux U RA Рис.xа. Ix V RВ RX Рис.xб. Здесь RA, RB – сопротивления амперметра и вольтметра. Значения сопротивлений, вычисленные по показаниям приборов, для схемы на рис.x,а: 𝑅𝑋′ = 𝑈 𝑈𝑋 + 𝑈𝐴 = = 𝑅𝑋 + 𝑅𝐴 𝐼𝑋 𝐼𝑋 Для схемы на рис.x,б: 𝑅𝑋′ = 𝑈𝑋 𝑈𝑋 𝑅𝑋 = = 𝐼 𝐼𝑋 + 𝐼𝐵 𝑥 + 𝑅𝑋 𝑅 𝐵 Относительная методическая погрешность измерения для схемы на рис.x,а: 𝛾= Δ𝑅𝑋 𝑅𝐴 = 𝑅𝑋 𝑅𝑋 Относительная методическая погрешность измерения для схемы на рис.x,б: 𝛾= 𝛾= Δ𝑅𝑋 𝑅𝐴 = 𝑅𝑋 𝑅𝑋 Δ𝑅𝑋 𝑅𝑋 =− 𝑅𝑋 𝑅𝑋 + 𝑅𝐵 Схема на рис.x,а обеспечивает меньшие погрешности при измерении больших сопролтивлений, а схема на рис.x,б – при измерении малых сопротивлений. Рассмотренный метод даже с учетом методической погрешности не может обеспечить высокой точности, так как погрешность измерения всегда больше суммы приведенных погрешностей обоих приборов. 8 Вместе с тем, возможности метода по диапазону измеряемых величин весьма велики. наименьшее значение измеряемого сопротивления ограничивается допустимым током по сопротивлению или возможностью измерения малых падений напряжения на этом сопротивлении. Измерение же больших сопротивлений ограничивается допустимым напряжением, которое можно приложить к измеряемому сопротивлению. Схематическое устройство индукционного ИМ приведено на рис.x. Электромагниты x и x, питаемые переменными токами Ix и Ix, создают магнитные потоки Фx и Фx. Эти потоки пронизывают алюминиевый диск x и индуцируют в нем токи Ixд и Ixд. Из всех возмолжных взаимодействий между токами и потоками вращающий момент возникает лишь от взаимодействия тока Ixд с потоком Фx и тока Ixд с потоком Фx. Величина этого момента описывается выражением 𝐌 = 𝐾𝑓𝛷𝑥 𝛷𝑥 sin 𝜑 ≈ 𝐾𝑥 𝑓𝐼𝑥 𝐼𝑥 sin 𝜑 Здесь – угол между потоками Фx и Фx, К,Кx – коэффициенты пропорциональности; правая часть выражения справедлива при пренебрежимо малом угле между токами и потоками. Постоянный магнит x служит для демпфирования диска. Как видно из выражения для вращающего момента, если один из токов Ix или Ix, пропорционален току в нагрузке (соответствующий электромагнит включен последовательно с нагрузкой), а другой – напряжению на нагрузке (соответствующий электромагнит включен параллельно с нагрузкой), то вращающий момент будет пропорционален произведению тока на напряжение, то есть мощности, потребляемой нагрузкой. Если теперь соединить с осью диска не пружину, обеспечивающую тормозящий момент, а счетчик оборотов, то показания этого счетчика будут пропорциональны интегралу от мощности – то есть количеству электроэнергии. 9 10 Задача x Решение Ток через вольтметр равен 𝐼В = ЭДС 𝑅𝐵 + 𝑅Я Измеренное вольтметром напряжение: 𝑈В = 𝐼В 𝑅𝐵 = ЭДС 𝑅𝐵 𝑥𝑥 𝑥 = ЭДС 𝑥 = ЭДС ∙ 𝑥, 𝑥𝑥𝑥𝑥𝑥𝑥 𝑅𝐵 + 𝑅Я 𝑥𝑥 + 𝑥, 𝑥 Относительная погрешность равна: 𝛿 = (𝑥 − 𝑥, 𝑥𝑥𝑥𝑥𝑥𝑥) × 𝑥𝑥𝑥% = 𝑥, 𝑥𝑥𝑥𝑥𝑥𝑥𝑥𝑥𝑥% Задача x Решение Схема включения приборов: W Сеть A V Ток в цепи нагрузки равен: Нагрузка 11 𝐼Н = 𝐼 ∙ 𝐾 = 𝑥, 𝑥 ∙ 𝑥𝑥 = 𝑥𝑥 А Активная мощность в нагрузке определяется по показаниям ваттметра с учетом трансформатора тока: 𝑃Н = 𝑃𝑊 ∙ 𝐾 = 𝑥𝑥𝑥 ∙ 𝑥𝑥 = 𝑥𝑥𝑥𝑥𝑥 Вт = 𝑥𝑥, 𝑥𝑥 кВт Полная мощность равна произведению тока в нагрузке на напряжение: 𝑆Н = 𝐼Н ∙ 𝑈 = 𝑥𝑥 ∙ 𝑥𝑥𝑥 = 𝑥𝑥𝑥𝑥𝑥 ВА = 𝑥𝑥, 𝑥𝑥 кВА Реактивная мощность равна: 𝑄Н = √𝑆Н𝑥 − 𝑃Н𝑥 = √𝑥𝑥𝑥𝑥𝑥 𝑥 − 𝑥𝑥𝑥𝑥𝑥 𝑥 = 𝑥𝑥𝑥𝑥 ВАр = 𝑥, 𝑥кВАр Коэффициент мощности нагрузки: cos 𝜑 = 𝑃Н 𝑥𝑥𝑥𝑥𝑥 = = 𝑥, 𝑥𝑥 𝑆Н 𝑥𝑥𝑥𝑥𝑥