УДК 621.396.969.3 ПРИМЕНЕНИЕ СПУТНИКОВЫХ
реклама

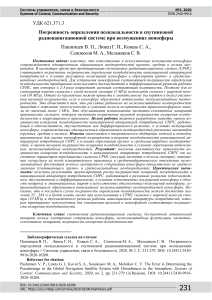
УДК 621.396.969.3 ПРИМЕНЕНИЕ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ В ЗАГОРИЗОНТНОЙ РАДИОЛОКАЦИИ Коршунов Д.Е., научный руководитель канд. техн. наук, доц. Сушкин И.Н. Сибирский федеральный университет Спутниковые радионавигационные системы (СРНС), наряду с системами мобильной связи, стали неотъемлемой частью человеческой деятельности. Технологии спутникового координатно-временного обеспечения используются в различных технических системах, быту, науке и образовании, в экономике и т.д. Для реализации потребностей в высокоточном координатно-временном обеспечении разработаны, созданы и введены в эксплуатацию СРНС ГЛОНАСС (Россия), GPS (США), а в настоящее время разрабатываются аналогичные системы GALILEO (Европейский Союз), Compass (Китай). Важность проблем глобального координатно-временного обеспечения регулярно подчеркивается руководством РФ и принят ряд постановлений, в соответствии которыми одним из основных направлений дальнейших работ в области СРНС является внедрение систем спутниковой навигации во все сферы человеческой деятельности. [1] Целью данной работы является исследование возможности применения навигационной аппаратуры потребителя (НАП) СРНС ГЛОНАСС и GPS в станциях загоризонтной радиолокации. В отличие от ультракоротковолновой радиолокационной станции, посылающей радиоволны прямо к цели, антенна загоризонтной радиолокационной станции (ЗГ РЛС) направляет луч коротких радиоволн на определенную область отражающего слоя ионосферы. Угол наклона луча, длина рабочей волны станции выбираются с таким расчетом, чтобы обеспечить распространение отраженных ионосферой радиоволн к цели, находящейся за радиогоризонтом; цель рассеивает энергию радиоволн, которая частично возвращается к антенне станции, также проходя через ионосферу. [2] На настоящем этапе загоризонтная радиолокация используется не достаточно эффективно, поскольку излучение зондирующего сигнала производится «вслепую», т.е. во время излучения нет полного представления о распределении полного электронного содержания (ПЭС) в ионосфере в данный момент времени. Проблему расширения функционального потенциала загоризонтной радиолокации можно решить путем применения НАП СРНС ГЛОНАСС и GPS за счет возможности прицельной радиолокации. НАП, установленная на ЗГ РЛС, принимает сигналы от всех навигационных космических аппаратов (НКА) ГЛОНАСС и GPS, находящихся в зоне видимости, из 0D кадра которых, посредством программного обеспечения, извлекаются сведения о координатах НКА, псевдодальностях до них, измеренных на частотах f1~1,6 ГГц и f2~1,2 ГГц и допплеровском сдвиге частоты. Поскольку орбита движения спутников значительно выше, чем наиболее чувствительный слой ионосферы, высота которого от 220 до 280 км, необходимо определить координаты точки пересечения трассы прохождения сигнала от НКА до НАП со слоем ионосферы. Для этого составим систему уравнений: x y сi y y i y xсi x xi y сi y y z сi z z i z y сi y yi , z сi z xi2 y i2 z i2 x 2 y 2 z 2 250000 2 2 2 xi x y i y z i z 1700000 (1) где: xi , yi , zi – координаты точки пересечения трассы прохождения сигнала от НКА до СТИ с ионосферой; x , y , z – координаты потребителя; xсi , yсi , z сi – координаты i-го НКА. Решением полученной системы уравнений будут координаты xi , yi , zi точки пересечения трассы прохождения сигнала от НКА до НАП с ионосферой. Интерполировав координаты спутника на каждое измерение, и имея скорректированные псевдодальности до НКА, рассчитывается усредненное значение ПЭС в ионосфере в области пересечения трассы прохождения сигнала с ионосферой. Задержка сигнала в тропосферном слое Земли не зависит от частоты сигнала, поэтому разница задержек сигналов на частотах f1 и f 2 , приходящих с одного спутника, будет обусловлена задержкой сигнала в ионосфере (рисунок 1). Разность времени распространения сигналов от навигационных спутников систем ГЛОНАСС и GPS до НАП на двух частотах f1 и f 2 пересчитывается в задержку распространения сигнала S от i-го НКА при прохождении ионосферы. Рисунок 1 – Задержка сигналов на частотах f1 и f 2 в ионосфере Полученная задержка распространения концентрацией в ионосфере Земли по формуле: 4,03 10 7 1 Nm 2 sin i f i Si j 2 1 j 1 j 1 сигнала связана z H0 H j 1 exp i Hj с электронной , (2) где: Si – задержка распространения сигнала i-го навигационного космического аппарата в ионосфере, определяется по формуле: S i 1,546 PR1corr PR2 corr для спутников системы GPS; S i 1,531 PR1corr PR2 corr для спутников системы ГЛОНАСС, где: PR1corr , PR2 corr – скорректированные псевдодальности, измеренные на частоте f1 и f 2 , взятые из файла с координатами спутников для i-го НКА. H 0 = 200 км; H 1 = 325 км; H 2 = 32,5 км; zi Rz2 2Rz Ri sin i Ri2 Rz – высота источника излучения i-го НКА; Rz – радиус Земли; i – угол места i-го НКА относительно навигационной аппаратуры потребителя; sin i xxсi x xz сi z z z сi z x 2 y 2 z 2 Ri ; Ri xсi x yсi y z сi z – расстояние от i-го НКА до приемника излучения, где: x , y , z – координаты приёмника, считанные из файла с записанными координатами СТИ; xсi , yсi , z сi – координаты i-го НКА. 2 h2 h1 h2 2 2 h1 h1 h2 h h 1 2 2 1,435 ; h1 h1 f i – частота сигнала i-го НКА, определяется по формуле: f i 1575,42 10 6 f доп – для спутников системы GPS; f i 1602 10 6 K 562,5 10 3 f доп – для спутников системы ГЛОНАСС, где K – номер литеры спутника системы ГЛОНАС. В ходе исследования разработано программное обеспечение, позволяющее по полученным данным построить карту распределения ПЭС в ионосфере, примерный вид которой приведен на рисунке 2: Рисунок 2 – Карта распределения ПЭС в ионосфере Посредством использования данной карты становится возможным наблюдение за состоянием ионосферы в режиме реального времени, что позволит изменять угол наклона луча, направляя его на область ионосферы с максимальным значением ПЭС, тем самым расширяя функциональный потенциал загоризонтной радиолокации. Список литературы: 1. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп. – М: Радиотехника, 2010. 800 с, ил. 2. Мищенко Ю.А. Загоризонтная радиолокация. – М.: Воениздат, 1972. 96 с.