Lecture 11
реклама

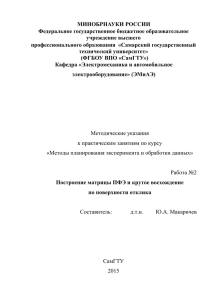
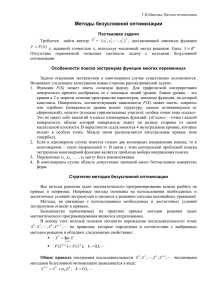
Организация эксперимента для поиска оптимальных условий ПФЭ и ДФЭ представляют возможность исследователю подбирать полиномиальные модели для описания локальных областей поверхности отклика, отражающей функциональную структуру объекта. Изменяя координаты базовой точки (основного уровня факторов), можно изучить весь рельеф поверхности отклика в области определения входных переменных объекта. Цели такого изучения могут быть различными. Так, например, может быть поставлена цель определения состояний объекта при различных значениях входных переменных. Однако в подавляющем большинстве цель исследования в той или иной мере связывается с поиском таких значений входных переменных, при которых достигается экстремальное значение выходной переменной, показателя оптимизации. Рассматривая задачу оптимизации с позиций экспериментального изучения поверхности отклика, можно говорить об организации некоторой целенаправленной стратегии эксперимента, позволяющей выйти по поверхности отклика в область экстремума, например ymax(X). Весь класс подобных задач характеризуется тем, что экспериментатора интересует уже не модель изучаемого объекта, а сама процедура поиска области пространства входных переменных, где достигается наилучший выход с объекта. Далеко не всегда можно построить математическую модель для стратегии поиска. Во многих случаях приходится просто ограничиваться описанием логических действий в эксперименте, чтобы лучше вести поиск. Так, например, обстоит дело с пошаговой процедурой метода крутого восхождения. Логика организации эксперимента с использованием этого метода заключается в следующем. Сначала выбирается некая область в пространстве независимых переменных, где ставится эксперимент, по результатам которого делается линейное приближение этой локальной окрестности поверхности отклика. Далее осуществляется движение по поверхности отклика в направлении градиента линейного приближения. Если необходимо, делается еще одно линейное приближение, и так продолжается до тех пор, пока исследователь не попадет в область, где линейной приближение поверхности отклика оказывается непригодным. В этой области независимых переменных ставится эксперимент для описания локальной области, близкой к экстремуму, как правило, оценивается квадратичная модель поверхности отклика второго порядка. Рассмотрим подробнее процедуру крутого восхождения. Известно, что наиболее коротких путь к экстремуму – в направлении градиента функции отклика y=η(x1, x2, …, xk). Градиент непрерывной функции есть вектор где – обозначение градиента, y y y I J K, x1 x2 xk y x j – частная производная по j-тому фактору, I, J, …, K – единичные векторы в направлении координатных осей факторного пространства. Оценками частных производных функции отклика являются соответствующие коэффициенты bj полиномиальной модели. Направление градиента определяется единственным способом, и движение должно начинаться из нулевой точки. На рисунке приведена простая геометрическая иллюстрация этого факта. Хорошо видно, что движение из наилучшей точки плана проходит в стороне от оптимальных условий. Можно рассуждать иначе. Функция отклика, вид которой нам неизвестен, разлагалась в ряд Тейлора в окрестности нулевой точки. Именно к этой точке и относится оценка градиента. Следовательно, если изменять факторы пропорционально величинам коэффициентов bj, то возможно движение в направлении градиента функции отклика по самому крутому пути. Шаговая процедура крутого восхождения практически выполняется в несколько циклов. Последовательно проведения циклов такова: 1. С центром в исходной точке X1 X11, X 21,, X j1 ,, X k1 проводится ПФЭ 2k для определения составляющих вектора градиента y X1 в виде оценок коэффициентов полиномиальной модели y=b0+b1x1+b2x2+…+bjxj+…+bkxk. Построение линейной модели включает в себя этапы ПФЭ: проверку однородности дисперсий, вычисление и проверку значимости оценок коэффициентов b j, проверку пригодности линейного приближения в окрестности исходной точки Прежде чем использовать линейную модель для задания направления градиента, следует учесть тот факт, что движение по градиенту будет эффективным, если значения коэффициентов bj примерно одного порядка. Линейная модель должна быть симметричной относительно коэффициентов. Если полученные коэффициенты bj различаются на порядок, то выгоднее вновь поставить эксперимент, изменив интервалы варьирования, а не начинать движение по градиенту. Возможность такого пути симметрирования коэффициентов обоснована тем, что составляющие градиента не инвариантны к метрике пространства независимых переменных. Изменяя масштаб единичного интервала варьирования по одной из координатных осей, можно увеличить или уменьшить крутизну поверхности в направлении этой оси, иными словами можно увеличить или уменьшить соответствующий коэффициент bj. 2. Траектория крутого восхождения представляется в натуральных значениях переменных. Координаты точек в направлении градиента рассчитываются по каждой входной переменной последовательным прибавлением к основным уровням Xj1 величин, равных шагам движения λj. Выбор шагов движения целесообразно сделать сначала для некоторой базовой переменной, создающей максимальное приращение в направлении градиента, т.н. max(bjΔXj)=bбΔXб, где ΔXб – интервал варьирования для выбранной базовой переменной. Для базовой переменной при крутом восхождении выбирается шаг движения λб. Размер и знак шагов движения λj для всех входных переменных могут быть вычислены по общей формуле b X j j j б , b б X б Где λб и ΔXj подставляются всегда положительными, а bj берется со своим знаком. 3. С выбранными размерами и знаками шагов рассчитываются координаты точек X h факторного пространства. Очевидно, что j-я координата h-й точки траектории равна Xjh=Xj1+h λj, j=1, 2, 3,… Для некоторых точек X h вычисляются предсказываемые значения ŷ h X h по линейной модели. Вычисляя значения, следует помнить, что в линейную модель можно подставлять только кодированные значения xjh. Поэтому натуральные значения Xjh должны быть переведены в кодированные согласно преобразованию примененному в ПФЭ X jh X jh X j0 X j . 4. Координаты некоторых точек (например, через каждые 2-3 шага) на траектории реализуются на объекте для экспериментальной проверки изменений y h X h в выбранном направлении градиента. Возникновение ситуации (например, в X h 2 , при которой дальнейшему увеличению предсказываемого значения ŷ h X h 1 соответствует уменьшение значения выходной переменной y h X h1 на объекте, будет указывать на прекращение движения в этом направлении градиента. Координаты точки X h с наилучшим значением выходной переменной y h X h принимаются за новые нулевые уровни входных переменных. Вновь проводится ПФЭ и определяется новое линейное приближение в направлении градиента и цикл крутого восхождения повторяется. В связи с тем, что каждый цикл крутого восхождения приближает значения y X к области экстремума с существенной кривизной поверхности отклика, то для каждого последующего цикла λб выбирается равным или меньшим предыдущего. При достижении области, близкой к экстремуму, линейное приближение становится непригодным, и исследование на этом может быть окончено, если ставилась задача достижения области экстремума. Исследование может быть расширено с целью описания области, близкой к экстремуму. Решение такой задачи проводится с реализацией планов 2-го порядка. Об эффективности движения по градиенту можно судить по величине параметра оптимизации. Движение по градиенту считается эффективным, если реализация мысленных опытов, рассчитанных на стадии крутого восхождения, приводит к улучшению значения параметра оптимизации по сравнению с самым хорошим результатом в матрице. При эффективном крутом восхождении возможны два исхода: область оптимума достигнута или область оптимума не достигнута. Область оптимума достигнута. Этот случай является самым легким в смысле принятия решений. Экспериментатор может окончить исследование, если задача заключалась в достижении области оптимума, или продолжить исследование, если задача заключалась не только в достижении области оптимума, но и в детальном ее изучении. При этом необходимо достроить линейный план до плана второго порядка и результаты эксперимента представить в виде полинома второй степени. Область оптимума не достигнута. В этом случае ставится линейный план следующего цикла и исследование продолжается. Неопределенная ситуация. Когда у не имеет ограничения и экспериментатор не может определить степень близости оптимума, возможны два решения: построение линейного плана следующего цикла или, если достигнут требуемый результат, окончание работы. Принимать решения при неэффективном движении по градиенту гораздо сложнее. Принятие решений во многом зависит от определенности ситуации (далеко от оптимума, близко, неопределенно) и от адекватности линейной модели. Область оптимума близка. Если при реализации матрицы планирования удалось получить достаточно высокие значения параметра оптимизации и при крутом восхождении улучшить их не удалось, то наиболее типичными являются решения: 1) окончание исследования (выбирается лучший опыт); 2) построение плана второго порядка для описания области оптимума. Если линейная модель была неадекватна, то возможно третье решение – выяснение причины неадекватности линейной модели. Например, имеется следующая ситуация: исходный план—полуреплика, линейная модель неадекватна, крутое восхождение оказалось неэффективно, область оптимума близка. Параметром оптимизации является выход полезного продукта. Максимально возможный выход — 100%. При реализации полуреплики получен наибольший выход — 80%. Ошибка опыта — 1 %. Какому из трех решений можно отдать предпочтение? Предлагается три варианта: 1) окончить исследование; 2) перейти к нелинейному планированию второго порядка; 3) достроить полуреплику до полного факторного эксперимента. Первое решение – окончить исследование. Давайте проанализируем ситуацию. Разница в 20% между максимальным и наилучшим выходом весьма ощутима. Видимо, целесообразно продолжить исследование и постараться улучшить значение параметра оптимизации. Окончить исследование можно в том случае, если бы ставилась цель только приблизиться к области высокого выхода. Второе решение — достроить линейный план до плана второго порядка. Это одно из возможных решений. Если бы исходным планом был полный факторный эксперимент, то такое решение было бы наиболее целесообразным. Но вы имели дело с дробным факторным экспериментом. В этом случае линейные оценки смешаны с эффектами взаимодействий. Поэтому имеет смысл подумать также и о другом решении. Третье решение — достроить полуреплику до полного факторного эксперимента. Это решение представляется разумным. Наряду с этим можно также рассматривать переход к нелинейному планированию. Область оптимума далека. Линейная модель адекватна. Если область оптимума далека и линейная модель адекватна, казалось бы, имеются все предпосылки, чтобы крутое восхождение оказалось эффективным. Тем не менее на практике крутое восхождение нередко оказывается неэффективным. Возможное объяснение — в характере поверхности отклика. Мы исходим из предпосылки, что поверхность отклика гладкая и одноэкстремальная. В действительности она может иметь, например, вид, показанный на рис. В таких случаях целесообразно передвинуться в другую область факторного пространства и построить линейный план второго цикла крутого восхождения. Область оптимума далека. Линейная модель неадекватна. Здесь возможно единственное решение: выяснить причины неадекватности линейной модели. Перечислим некоторые причины, вследствие которых крутое восхождение могло оказаться неэффективным. 1. Интервалы варьирования выбраны неудачно. 2. Исходная модель строилась по полуреплике. Нужно достроить полуреплику до полного факторного эксперимента, получить раздельные оценки для всех коэффициентов регрессии и совершить новое крутое восхождение. 3. Исходная модель строилась по дробной реплике 2к–р, где p>1. Целесообразно использовать метод «перевала», т.е. построить матрицу второй серии опытов, изменив все знаки на обратные. Это даст возможность освободить линейные эффекты от совместных оценок с парными взаимодействиями. Положение не улучшится, если значимыми являются взаимодействия более высокого порядка. В случае нелинейности исходной модели можно попытаться преобразовать параметр оптимизации. Это обычный прием для снижения степени полинома. Крутое восхождение неэффективно. Положение оптимума неопределенное. Если нет информации о положении оптимума и на стадии крутого восхождения не удалось улучшить значение параметра оптимизации, то можно рекомендовать поставить опыты в центре эксперимента с тем, чтобы оценить вклад квадратичных членов. При значимой сумме можно приступать к достройке линейного плана до плана второго порядка, так как наличие квадратичных членов свидетельствует о близости к почти стационарной области. Обратим еще раз ваше внимание на то, что при незначимой сумме обратного вывода делать нельзя.