индуктивный преобразователь перемещений
реклама

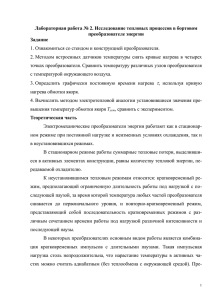
МИНИСТЕРСТВО ОБЩЕГО И ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Московский государственный институт электроники и математики (Технический университет) Кафедра метрологии и сертификации ИНДУКТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ Методические указания По выполнению лабораторной работы По дисциплине ПЕРВИЧНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ Москва 2003 Составитель докт.техн.наук, профессор Е.А.Карцев Инлуктивный преобразователь перемещений: Метод. Указания по выполнению лаб.работы по дисциплине «Первичные измерительные преобразователи», по.спец.1907 и 1906/Моск. ин-т электроники и математики; сост. Е.А.Карцев. М., 1989. 17с. Настоящие методические указания являются составной частью системы методического обеспечения дисциплины «Первичные измерительные преобразователи, изучаемой студентами IУ – У курсов специальности 1907 «Информационно-измерительная техника» и специальности 1906 «Метрология, стандартизация и управление качеством». Основным содержанием лабораторной работы является изучение принципа действия индуктивных преобразователей линейных перемещений. Табл. 2. Ил. 6. Библиогр.; 3 назв. Рецензент канд.техн.наук, доц. В.Д.Малинский I. Цель работы I.I. Ознакомится с принципом дествия индуктивных и трансформаторных датчиков, датчиков перемещения и схемами их включения в измерительные электрические цепи. I.2. Экспериментальным путем оптимизировать частоту напряжения питания измерительной схемы индуктивного и трансформаторного преобразователей по критерию максимальной чувствительности. 2.Основные теоретические положения. Индуктивными называются преобразователи, преобразующие значение измеряемого перемещения в значение индуктивности. На рис.1. представлен простейший индуктивный преобразователь, состоящий из неподвижного магнитопровода 2, на котором расположена катушка 4 с числом витков W1, и подвижной пластины I. Пластина I и магнитопровод 2 выполнены из ферромагнитного материала. Последовательно с обмоткой 4 включен миллиамперметр 3. К концам обмотки подано напряжение переменного тока Рис.1. U = const Индуктивность обмотки WФ L , (I) I где Ф – магнитный поток, I – ток, протекающий по катушке. Величину магнитного потока можно определить используя выражение IW IW1 (2) Ф 1 , ZM Rм.ст. R jX M где Z M – магнитное сопротивление магнитопровода; W – число витков катушки; RM .СТ – магнитное сопротивление участков из стали; R – магнитное сопротивление воздушных участков магнитопровода; X M – реактивная составляющая сопротивления магнитной цепи, обусловленная потерями на вихревые токи и гистерезис. С учетом (2) уравнение (1) примет вид W12 W2 L , (3) 2 ZM RM .CT jX M 0S где - величина воздушного зазора между подвижной и неподвижной частями магнитопровода; S - площадь воздушного зазора; 0 - магнитная проницаемость воздуха; RM .ct lM1 l M2 S m1 S m 2 (4) l M 1 , l M 2 - длина неподвижной и подвижной части магнитопровода, определенная по средней линии, - магнитная проницаемость материала магнитопровода, S m1 , S m 2 - площадь сечения неподвижной и подвижной частей магнитопровода. Если подвижный магнитопровод жестко соединить с объектом, перемещение X которого измеряется (рис.1), то при изменении X изменяется и величина воздушного зазора , что приведет к изменению магнитного сопротивления Z M , а следовательно и индуктивности L катушки (см. уравнение 3) При изменении индуктивности катушки будет изменятся и ее индуктивное сопротивление X L L , а следовательно и величина тока, протекающего по катушке имеет вид U U U (5) I Z R 2 X L2 R 2 (L) 2 где R - активное сопротивление цепи, - частота переменного напряжения, питающего катушку преобразователя. Если на магнитопровод (рис.1) поместить не одну, а две обмотки с числом витков W1 и W2 соответственно, то при изменении магнитного сопротивления магнитопровода Z M будет изменятся взаимная индуктивность М между обмотками WW (6) M 1 2 ZM Преобразователи, преобразующие значение изменяемого механического перемещения X в значение взаимной индуктивности обмоток, называются трансформаторными. Очевидно, что с ростом зазора величина Z M будет возрастать, взаимная индуктивность M будет уменьшатся, следовательно будет уменьшатся и величина ЭДС, наводимая в обмотке W2 . Преобразователь, изображенный на рис.1 называется преобразователем с замкнутой магнитной цепью или преобразователем с малым воздушным зазором. Измеряемое перемещение X max таких преобразователей обычно лежит в пределах 1-5 мм. На рис.2, а представлен преобразователь с разомкнутой магнитной цепью. Он представляет собой катушку 1, внутри которой может перемещаться сердечник 2, выполненный из магнитно-мягкого материала. Сердечник связан с объектом, перемещение X которого измеряется. Перемещение сердечника вызывает изменение Рис.2. индуктивности катушки. Такой тип преобразования применяется для измерения перемещений X max от 5 до 100 мм. Для вышерассмотренных преобразователей характерно, что сопротивление магнитных участков магнитопровода RM .CT и реактивная составляющая сопротивление магнитной цепи X M много меньше, чем сопротивление воздушного участка магнитопровода, т.е. R RM .CT и R X M В связи с этим обстоятельством уравнение (3) в первом приближении можно представить в W 2 S виде L 1 0 (7) 2 Из уравнения (7) видно, что индуктивность L и индуктивное сопротивление катушки W1 c ростом зазора изменяется по гиперболическому закону (рис.3), т.е. функция преобразования нелинейна, что затрудняет практическое в измерительных приборах. На рис.3 представлена зависимость комплексного сопротивления z1 обмотки W1 индуктивного преобразователя от величины воздушного зазора 0 . Для уменьшения погрешности нелинейности рабочий диапазон измеряемых перемещений ограничивают величиной x 0.1 0 , где 0 - начальное значение воздушного зазора в магнитной цепи. В этом диапазоне функцию преобразования z1 ( ) с погрешностью порядка I % можно аппроксимировать прямой линией. Для уменьшения погрешности нелинейности функции преобразования широко применяются дифференциальные индуктивные преобразователи. На рис.2,б представлена схема такого преобразователя. Две идентичные по параметрам катушки с числом витков W1 и W2 имеют общий стальной сердечник I, симметрично расположенный внутри катушек. В этом случае индуктивные сопротивление катушек L1 и L2 равны, равны и их Рис.3. комплексные сопротивления z 01 и z 02 . При включении этих катушек в качестве плеч мостовой схемы (рис.2,б), в которой Z3=Z4 - постоянные комплексные сопротивления, напряжение между точками "а" и "б" измерительной диагонали моста будет равно нулю и ток указателя УК будет также равен нулю. При смещении сердечника I на величину измеряемого перемещения X вправо индуктивное сопротивление катушки W1 уменьшится, а катушки W2 - возрастет, что приведут к разбалансу мостовой измерительной схемы и появлению тока I УК в измерительной диагонали моста «а - б». Ток указателя для дифференциальной схемы включения определяется выражением I УК К1 ( z1 z 2 ) , (8) где z1 , z 2 - комплексные сопротивления катушек W1 и W2 дифференциального индуктивного преобразователя перемещений K1 - коэффициент, зависящий от величины комплексных сопротивлений Z3 и Z4 двух других плеч мостовой схемы и от внутреннего сопротивления указателя. Графики изменения комплексных сопротивлений Z1 и Z2 катушек W1 и W2 дифференциального индуктивного преобразователя от перемещения Х представлены на рис.3. На этом же рисунке изображена функция, характеризующая закономерность изменения разности Z1-Z2 от измеряемого перемещения X. Из приведенного графика следует, что зависимость Z1 Z 2 ( X ) имеет более линейный характер, чем каждая из функции Z1 ( х) и Z 2 ( х) . Поэтому при той же допустимой погрешности аппроксимации функции преобразования (~I%), что и в обычном индуктивном преобразователе, рабочий диапазон дифференциального преобразователя расширяется примерно в 4 раза (см. рис.3): с 0,1 0 до 0,4 0 . Кроме того, в таком преобразователе существенно снижаются погрешности, обусловленные влиянием изменения температуры окружающей среды, поскольку при этом параметры W1 и W2 изменяются одинаково как по величине, так и по знаку и это не приводит к появлению дополнительной аддитивной погрешности. На рис.2,в приведена схема дифференциального трансформаторного преобразователя перемещений. В этом случае на каркас катушки W1 концентрично с ней наматывается обмотка W3. Соответственно на каркас катушки W2 наматывается обмотка W4. При этом W 1 = W2 и W3 = W4. При симметричном положении сердечника коэффициенты взаимной индуктивности M1, обмоток W1 и W3 и M2 обмоток W2 и W4, равны. Тогда ЭДС, наводимые в обмотках W3 и W4 будут равны, и, поскольку катушки W1 и W2 включены в измерительную схему встречно, ток указателя I УК будет равен нулю. При смещении сердечника под действием измеряемого перемещения Х равенство коэффициентов взаимной индуктивности двух пар катушек нарушается, ЭДС, наводимые в обмотках W3 и W4 будут иметь равную величину и по указателю, имеющему внутреннее сопротивление RН, потечет ток IУК, величина которого будет практически линейно связана с измеряемым перемещением Х. Следует отметить, что чувствительность рассмотренных измерительных схем (рис.2,б, 2,в) зависит от соотношения сопротивлений RН и Z01=Z02=Z0, где RН - внутреннее сопротивление измерительного прибора (указателя). Условие согласования сопротивления указателя RН с выходным сопротивлением моста, при котором обеспечивается максимальная чувствительность, для мостовой схемы (рис.2,б), определяется соотношением R Н 0,5 Z 0 0,5 R 2 (L0 ) 2 (9) где – частота питающего напряжения, L0 – индуктивность каждой из катушек с числом витков W1 и W2 (W1 = W2) при симметричном положении сердечника катушек, Z0 – полное сопротивление каждой из катушек W1 и W2. Из последнего уравнения следует, что при заданных значениях RН (известен тип применяемого измерительного прибора) и L0 режим оптимальной чувствительности можно получить путем подбора частоты питающего напряжения . В данной лабораторной работе подбор частоты питающего напряжения с целью обеспечения максимальной чувствительности осуществляется не расчетным, а экспериментальным путем. З. Оборудование, используемое при выполнении лабораторной работы 3.1. Объект исследования Объектом исследования является дифференциальный индуктивный датчик линейных перемещений, имеющий два цилиндрических каркаса, на каждом из которых намотаны по две обмотки на каркасе I -обмотки W1 и W3, на каркасе 2 - обмотки W2 и W4 (рис.4). Преобразователь исследуется при двух вариантах включения его обмоток в измерительные схемы. Первая измерительная схема изображена на рис.4,а. Обмотки W1 и W2 двух катушек включены в мостовую измерительную схему, в которой в качестве двух других плеч моста используются обмотки трансформатора Тр, имеющие сопротивления Z3 и Z4. При среднем положении сердечника Z01 = Z02 и Z3 = Z4. Мост сбалансирован. Рис.4. Токи, текущие по обмоткам трансформатора равны и противоположны по направлению, в связи с чем во вторичной обмотке трансформатора Тр наведенная ЭДС равна нулю, что и фиксируется по вольтметру V c внутренним сопротивлением Rн. Перемещение сердечника в любую сторону от положения равновесия приводит к нарушению равенства плеч Z1 и Z2 и появлению ЭДС во вторичной обмотке трансформатора, что фиксируется ламповым вольтметром V. Обмотки W3 и W4 в данной схеме не используются. Условие согласования внутреннего сопротивления вольтметра с выходным сопротивлением моста, при котором обеспечивается максимальная чувствительность, для данного варианта мостовой схемы имеет вид RН 2 Z 01 2 R 2 (L01 ) 2 . Второй вариант измерительной схемы, исследуемой в лабораторной работе, изображен на рис.4,б. В этом случае напряжение питания подается на две последовательно включенные обмотки W1 и W2, расположенные разных каркасах. Вторичные обмотки дифференциального трансформаторного преобразователя W3 и W4 включены встречно. Поэтому при симметричном расположении сердечника суммарная ЭДС в цепи вторичных обмоток равна нулю. При перемещении сердечника от симметричного положения суммарная ЭДО в цепи вторичных обмоток будет функционально связана с измеряемым перемещением Х. Конструкция установки для проведения экспериментальных исследований индуктивного дифференциального преобразователя приведена на рис. На жестком штативе I закреплен индуктивный дифференциальный преобразователь перемещений. В цилиндрическом корпусе 7 размещены два каркаса 14 и 15, на которые нанесены обмотки W1, W2 и W2, W4 соответственно. Внутри каркасов катушек расположен сердечник 5, закрепленный на продольной оси 6, которая закреплена во втулках 4 и может перемещаться в вертикальном направлении. Ось 6 заканчивается сферическим измерительным наконечником 8, который контактирует с плоскостью неравно плечного рычага 9, закрепленного на оси вращения 13. Вертикальная плоскость неравно плечного рычага 9 находится в контакте с торцом микрометрического винта 12 микрометрической пары 10. Рис.5. Микрометрическая пара 10 жестко закреплена на штативе I посредством кронштейна 11. Возвратная пружина 2 обеспечивает непрерывный механический контакт измерительного наконечника 8 с плоскостью рычага 9. В процессе экспериментальных исследований линейные перемещения задаются нижнему концу рычага 9 посредством вращения винта микрометрической пары 10. Это перемещение трансформируется неравноплечим рычагом 9 в вертикальные перемещения сердечника дифференциального индуктивного преобразователя. Цена деления шкалы микрометрической пары - 0,5 мм, цена деления вращающегося нониуса -0,01 мм. При включении обмоток преобразователя по схеме, представленной на рис.4,а в дальнейшем будем называть схему "мостовая схема включения". Соответственно при включении обмоток преобразователя по схеме, представленной на рис. 4,6 будем называть схему «трансформаторная схема включения » 3.2. Структурная схема установки и используемое оборудование Структурная схема установки, предназначенной для определения функции преобразования дифференциального индуктивного преобразователя, представлена на рис.6. рис.6. Напряжение для питания исследуемой схемы U~ снимается c выхода генератора Г типа Г-47 и подается на коммутатор К, посредством которого осуществляется включение обмоток дифференциального индуктивного преобразователя либо по мостовой (рис.4,а), либо по трансформаторной (рис.4,б) схемам. Выходное напряжение любой из исследуемых схем измеряется электронным вольтметром В типа В7- , имеющим 8 диапазонов измерения. Коммутатор К на лицевой панели имеет ручку переключателя, которая может устанавливаться в положение "мостовая схема", либо "трансформаторная схема". Генератор Г-47 позволяет регулировать частоту выходного сигнала в диапазоне I Гц 10 МГц с погрешностью не хуже ±1Гц и выходное напряжение в диапазоне от 0,01 В до 10 В с погрешностью 0,1%. Электронной вольтметр В7позволяет измерять напряжения от I мВ до 600 В в области частот до 10 МГц и имеет 10 диапазонов измерения. Приведенная погрешность измерения на каждом из диапазонов не превосходит 1,5%. 4. Методика проведения исследований и обработки результатов эксперимента. Основная цель проведения лабораторной работы – оптимизировать частоту напряжения питания измерительной схемы индуктивного преобразователя с целью получения максимальной чувствительности. Сущность методики исследований заключается в экспериментальном определении зависимости выходного напряжения измерительной схемы от входного перемещения (градуировочных характеристик) на частотах 60, 220, 520, 1030, 1530, 2030, 2530, 3030 Гц в диапазоне перемещений 0 – 5 мм. На основании результатов эксперимента определяется частота питания, при которой чувствительность преобразователя имеет максимальное значение. Эта частота считается оптимальной и принимается за рабочую частоту преобразователя. Исследования проводятся для двух вариантов измерительных схем, в которые включены обмотки измерительного преобразователя мостовой и трансформаторной (см. п.З настоящих методических указаний). Исследования и обработка полученных результатов проводятся в указанной ниже последовательности. 4.1. Включить сетевое питание электронного вольтметра и генератора и дать им прогреться в течение 1 мин. 4.2. Установить выходную частоту генератора 60 Гц и выходное напряжение UПИТ=2В; переключатель коммутатора поставить в положение "мостовая схема включения". 4.3. Провести балансировку мостовой измерительной схемы, для чего выполнить следующие операции - переключатель коммутатора поставить в положение “мостовая схема включения” - вращением ручки микрометрической пары, жестко закрепленной на штативе индуктивного преобразователя, добиться минимально возможного показания на шкале электронного вольтметра, при подходе к минимуму верхний предел измерения вольтметра должен быть не более 300 мВ; - минимальные показания вольтметра зафиксировать в графе табл. 1, соответствующей частоте питания 60 Гц и задаваемому перемещению 0 мм; - зафиксировать по отсчетному устройству микрометрической пары положение микровинта, соответствующее минимальным показаниям вольтметра, приняв его за начало отсчета задаваемых в п.4.4. перемещений. 4.4. Определить градуировочную характеристику индуктивного преобразователя перемещений, задавая вращением микрометрического винта по часовой стрелке перемещения 0,5; 1,0; 1,5; 2,0; 2,5; 3,0; 3,5; 4,0; 4,5; 5,0 мм и фиксируя в табл. I выходные напряжения измерительной схемы, соответствующие каждому значению перемещения. Таблица 1 Задаваемые Выходное напряжение мостовой измерительной схемы при частоте питания перемещения, (мВ, В) мм 60Гц 220Гц 520Гц 1030Гц 1530Гц 1830Гц 2030Гц 2530Гц 3030Гц 0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0 U мВ S , X мм Задаваемые перемещения, мм 0 1 2 3 4 5 U мВ S , X мм Таблица 2 Выходное напряжение трансформаторной измерительной схемы при частоте питания (мВ, В) 60Гц 110Гц 220Гц 320Гц 420Гц 520Гц 1030Гц 1530Гц Примечание 1: один полный оборот микровинта соответствует задаваемому перемещению 0,5 мм. 4.5. Последовательно изменяя частоту генератора до значений 220; 520; 1030; 1530; 2030; 2530; 5050 Гц определить семейство градуировочных характеристик индуктивного преобразователя на этих частотах, используя методику п.п.4.3 и 4.4. Результаты измерений занести в табл.1. Примечание 2: погрешность регулировки выходной частоты звукового генератора не должна превышать ±10 Гц. 4.6. Определить градуировочные характеристики индуктивного преобразователя при включении его обмоток в трансформаторную измерительную схему, для чего: - переключатель коммутатора поставить в положение "трансформаторная схема включения"; - провести балансировку трансформаторной измерительной схемы при частоте питающего напряжения 60 Гц в соответствии с п.4.3; - в соответствии с п.4.4. определить градуировочную характеристику преобразователя, зафиксировав выходные напряжения в табл.2; - последовательно выставляя частоту питающего напряжения 110; 220; 320; 520; 1030; 1530 Гц, в соответствии с п.п.4.3, 4.4. определить семейство градуировочных характеристик на этих частотах, зафиксировав результаты измерений в табл.2. 4.7. На основании подученных результатов расчетным путем определять чувствительность индуктивного преобразователя по перемещению для каждой из частот, используя выражение U мВ S , X мм где U - приращение выходного напряжения измерительной схемы, соответствующее перемещению X =1 мм в диапазоне от 2-х до 3-х мм, Результаты расчетов поместить в последние строки таблиц I и 2. 4.8. Построить три графика функций преобразования U (x) , соответствующие минимальной, максимальной и промежуточной чувствительности для мостовой схемы включения с указанием для каждого из них частоты питающего напряжения. 4.9. Построить три графика функции преобразования U (x) , соответствующие минимальной, максимальной и промежуточной чувствительности для трансформаторной схемы включения с указанием для каждого из них частоты питающего напряжения. Примечание. Графики по п.4.8. и 4.9 строятся в одной системе координат. 4.10. По результатам проведенных экспериментальных исследований дать заключение об оптимальных частотах напряжения питания, исходя из критерия максимальной чувствительности для обеих исследованных измерительных схем. Оценить, какая из схем включения имеет большую чувствительность. 4.11. Аппроксимировать функции преобразования, полученную при оптимальной частоте питающего напряжения, линейной зависимостью, используя метод наименьших квадратов. Определить диапазон измеряемых перемещений, в котором погрешность аппроксимации не превышает 2 %. Вычисления провести по специально разработанной программе на ЭВМ “Электроника 100/2”. 5. Требования к технике безопасности при выполнении лабораторной работы. 5.1. Включения в сеть всех используемых в лабораторной работе приборов собранной схемы можно производить только с разрешения лаборанта или преподавателя после проверки ими подготовленных к включению приборов и схем, 5.2. В случае обнаружения нарушения целостности изоляции проводов, искрения в розетках сети и вилках кабелей питания прекратить выполните работы, выключить все приборы и обратиться к лаборанту или преподавателю, проводящему лабораторный практикум. 5.3. Категорически запрещается включать в сеть и пользоваться приборами в случае нарушения целостности проводов заземления их корпусов. 6. Содержание отчета 6.1. Отчет по лабораторной работе должен быть помещен в отдельной тетради, предназначенной для оформления всего цикла лабораторных работ по курсу 6.2. Отчет должен содержать - цель работы; - основные формулы с использованием которых можно объяснить принцип работы индуктивных преобразователей перемещений; - две измерительные схемы, которые экспериментально исследовались в процессе выполнения лабораторной работы; - структурную схему лабораторной установки; - таблицу с результатами экспериментальных исследований и расчетов; - шесть графиков функций преобразования, построенных в соответствии с п.4.8 и 4.9 настоящих методических указаний; - заключение об оптимальной частоте питающего напряжения для каждой из исследованных схем включения индуктивного преобразователя; - численное значение диапазонов измеряемых перемещений, в котором погрешность линейной аппроксимации функции преобразования не превышает 2 %. 7. Контрольные вопросы 7.1. Какова конечная цель выполненных экспериментальных исследований. 7.2. Поясните принцип работы индуктивных датчиков перемещений, используя приведенные в методических указаниях аналитические выражения. 7.3. В чем заключается отличие индуктивного преобразователя от трансформаторного? 7.4. Объясните, какими преимуществами обладает дифференциальный индуктивный преобразователь по сравнению с обычным. 7.5. Поясните принцип работы мостовой и трансформаторной измерительной схем. 7.6. Напишите и поясните условие согласования внутреннего сопротивления вольтметра с выходным сопротивлением мостовой измерительной схемы, при котором обеспечивается максимальная чувствительность измерительного устройства. 7.7. Методика проведения исследований и обработки результатов эксперимента. 7.8. Каким образом производилась балансировка исследуемых измерительных схем перед началом измерений. 7.9. Чем вызвано изменение чувствительности измерительной схемы при изменении частоты питающего напряжения. 7.10. Прокомментируйте вид градуировочных характеристик индуктивного преобразователя с позиций обеспечения постоянства чувствительности в пределах исследуемого диапазона перемещений. 8. Библиографический список 8.1. Е.А. Карцев. Измерительные преобразователи. – М. МИЭМ, 1986 8.2. Левшина Е.С., Новицкий П.В. Измерительные преобразователи. Энергоатомиздат, 1983. 8.3. Электрические измерения неэлектрических величин. – Л., Энергия, 1975. – Л., Индуктивный преобразователь перемещений Составитель КАРЦЕВ Евгений Александрович Технический редактор 0.Г.Завьялова Подписано в печать 6.О6.89 Формат 60х84/16 Бумага типографская № 2 Печать ротапринтная Вчл.печ.л. 1,2 Усл. кр.-отт. 1,2 Уч.-изд.л. 1,0 Изд. №64 Тираж 100 экз. Заказ –476 Московский институт электронного машиностроения, 109028 Москва, Б. Вузовский пер., 3/12. Печатный цех Московского института электронного машиностроения, 113054, Москва, М. Пионерская, 12.