ПРОЦЕДУРА ВОСПОЛНЕНИЯ НАПРЯЖЕНИЙ ПРИ РЕШЕНИИ НЕЛИНЕЙНЫХ КРАЕВЫХ ЗАДАЧ МЕХАНИКИ ДЕФОРМИРУЕМОГО ТВЁРДОГО ТЕЛА
реклама

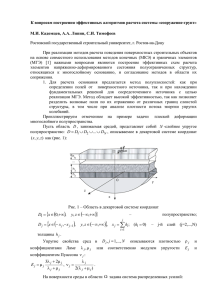
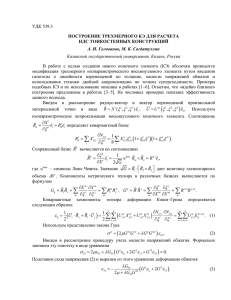
ПРОЦЕДУРА ВОСПОЛНЕНИЯ НАПРЯЖЕНИЙ ПРИ РЕШЕНИИ НЕЛИНЕЙНЫХ КРАЕВЫХ ЗАДАЧ МЕХАНИКИ ДЕФОРМИРУЕМОГО ТВЁРДОГО ТЕЛА МЕТОДОМ КОНЕЧНЫХ ЭЛЕМЕНТОВ Роговой А.А., Столбова О.С. Пермь, Россия В механике деформируемого твердого тела численная реализация принципа виртуальных перемещений методом конечных элементов (МКЭ) приводит к достаточно хорошей аппроксимации поля перемещений, но к значительно худшей аппроксимации поля напряжений. В настоящее время существуют различные методы восполнения напряжений в рамках постановки Лагранжа, неравнозначные как по точности, так и по сложности реализации. Процедура восполнения напряжений, изложенная ранее в [1] и проиллюстрированная на задаче линейной теории упругости, позволяет строить поля напряжений с той же точностью (того же порядка аппроксимации), что и поля перемещений. В данной работе излагаются основные положения этого подхода при решении МКЭ краевых задач нелинейной механики деформируемого твердого тела. Рассмотрим вариационную постановку краевой задачи механики деформируемого твердого тела в форме Лагранжа в начальной конфигурации Q 0 U dS0 0 K U dV0 PˆI Fˆ dV0 0 , S0 V0 (1) V0 где S 0 и V0 — поверхность и объем тела в начальной конфигурации, Q0 — вектор сил, приведенных к поверхности S 0 , K — вектор массовых сил, 0 — плотность материала в начальной конфигурации, Pˆ — несимметричный тензор напряжений Пиола-Кирхгофа I первого рода, F̂ — градиент места, U — вектор перемещений из начальной конфигурации в текущую, — символ вариации. Осуществим численную реализацию уравнения (1) методом конечных элементов (см., например, [2]). Вектор U аппроксимируем в области V0 через его узловые значения U k и функции формы ψ(j)k : m U = U k ψ(j)k k=1 j 1 jM V0 k n V (2) Здесь M k 0 — множество номеров элементов, содержащих k -й узел в объеме V 0 , n и m — число узлов и конечных элементов. В результате получаем систему нелинейных векторных уравнений для определения перемещений в узлах сетки U k . Применим процедуру восполнения напряжений. Для этого выберем внутри тела достаточно гладкую поверхность l 0 , делящую тело на две части и образованную поверхностями примыкающих к ней двух слоев конечных элементов (узлы этих элементов, выходящие на поверхность l 0 , образуют множество Nl 0 ). Одну часть тела отбросим, а ее силовым воздействием на оставшуюся будет вектор неизвестного распределенного усилия Pl 0 , который, в соответствии с обычной процедурой МКЭ, приводится к узлам, составляющим множество Nl 0 . С другой стороны, это приведенное к узлу усилие определяется как произведение матрицы жёсткости для этого узла на найденный в результате решения задачи вектор узловых перемещений. В итоге приходим к системе интегральных уравнений Фредгольма первого рода, определяющей вектор Pl 0 . Для решения полученной системы аппроксимируем искомые подынтегральные функции теми же функциями формы, что и перемещения: Pl 0 = где M kl0 kNl 0 k P ψ(j) , j l M 0 k l0 k (3) — множество номеров элементов, содержащих k -й узел, чьи стороны принадлежат поверхности l 0 . Таким образом, векторы U (2) и Pl 0 (3) имеют одинаковый порядок аппроксимации. Для нахождения узловых значений Pkl 0 , применим метод наименьших квадратов и, в силу некорректности задачи по Адамару, воспользуемся регуляризаторами А.Н. Тихонова с различными параметрами регуляризации. Поступая аналогично для двух других поверхностей t 0 и d 0 , проходящих через тот же k -й узел, получаем значение вектора распределенных усилий Pkt 0 и Pkd0 в этом узле, соответствующее другим поверхностям. Используя соотношения Коши nkl0 PˆIk = Pkl0 , nkt0 PˆIk = Pkt0 , nkd0 PˆIk = Pkd0 , где nkl0 , nkt0 и nkd0 — внешние единичные нормали к поверхностям l 0 , t 0 и d 0 в k -ом узле в начальной конфигурации, получаем систему девяти линейных алгебраических уравнений для определения девяти составляющих тензора напряжений PˆI в k -ом узле. Описанная процедура позволяет строить тензор напряжений Пиола-Кирхгофа первого рода PˆI , не используя операцию дифференцирования вектора перемещения. Однако, даже определив Pˆ , не используя операцию непосредственного I дифференцирования вектора перемещений, для нахождения тензора истинных напряжений Tˆ J 1Fˆ PˆI придется к ней прибегнуть, поскольку F̂ и J (третий инвариант F̂ , определяющий относительное изменение объема) являются функциями производных вектора перемещений. Ситуацию можно значительно улучшить, осуществив линеаризацию уравнений, основываясь на кинематике наложения малых деформаций на конечные [3, 4]. Для этого, вводя три конфигурации ― начальную, текущую и промежуточную, близкую к текущей, значения всех кинематических и силовых величин в текущей конфигурации представляются через значения этих величин в промежуточной конфигурации и их приращения при переходе к текущей. Процесс нагружения разбивается на ряд достаточно малых шагов. Промежуточная конфигурация на текущем шаге ― это известная после решения задачи на предыдущем шаге конфигурация с известными силовыми и кинематическими величинами. В соответствии с этим переписывается вариационное уравнение Лагранжа, в котором варьируемой величиной является теперь приращение вектора перемещений, и система уравнений для определения этих приращений становится линейной. Процедуру восполнения напряжений теперь необходимо применять на каждом шаге. В результате на каждом шаге получаем значения приращения вектора распределенного усилия в каждом узле k на поверхности l 0 , а, значит, определяем все девять составляющих приращения тензора напряжений Пиола-Кирхгофа первого рода pˆ I в узле k . Для перехода к следующему шагу нагружения нужно найти кинематические величины, в которые входят производные по координатам от вектора приращения перемещения. Избежать при этом непосредственного дифференцирования кусочнонепрерывной сеточной функции (чтобы не потерять точность) можно, используя выражение pˆ I PˆI hˆT J Fˆ1 ( LIV eˆ) , где hˆT ― градиент приращения перемещений относительно промежуточной конфигурации, LIV ― функция отклика материала на малые деформации относительно промежуточной конфигурации [5], все величины со «звёздочками» определены в промежуточной конфигурации. В результате получаем систему девяти скалярных уравнений для определения девяти составляющих тензора ĥ . Применение описанной процедуры восполнения напряжений демонстрируется на примере плоской задачи линейной теории упругости об одноосном растяжении квадратной пластины, находящейся в условиях плоской деформации (сечение бесконечно длинного стержня), усилиями, приложенными к двум ее противоположным, изменяющимся в процессе деформирования, поверхностям все время по нормали (следящая нагрузка). Касательные усилия на этих поверхностях равны нулю. В силу симметрии задачи рассматривается четвертинка пластины (Рис. 1). Используем лагранжевы (материальные) координаты 1 , 2 и определим положение любой точки тела r 1 e1 2 e2 , в начальной конфигурации радиус-вектором где e1 , e2 — ортонормированный базис. Поведение материала описывается упрощенным законом Синьорини [3, 4]: Tˆ I1 1/ 2 ( G ) I12 gˆ 2 G ( G ) I1 Aˆ , где Â — тензор деформации Альманзи, I1 — первый инвариант Â , ĝ — единичный тензор. Константы материала в данной задаче: 0.5 МПа, G 1 МПа. При численном решении используется сетка треугольных конечных элементов (Рис. 1). Весь процесс растяжения разбивается на N шагов. При решении задачи все векторные и тензорные величины представляются в базисе e1 , e2 . Полагается, что длина стороны квадратной пластины (сечения бесконечно длинного стержня) a 1 . Приращение усилия на торцах задаётся в виде функции q(1 ) 0.001(1 10(1 )2 ) . Задача решается на сетках 5 5, 10 10, 20 20, 40 40 при линейной, квадратичной и кубической аппроксимации поля приращения перемещений. Напряжения определяются на основе дифференцирования полученных полей (обычный метод), при этом порядок аппроксимации первых по сравнению с последними снижается на единицу. Кроме этого для линейной аппроксимации поля приращения перемещений строится поле напряжений, используя изложенную выше процедуру восполнения при значении параметра регуляризации 106 . Определив тензор истинных напряжений Tˆ в базисе e1 , e2 , строятся нормальные и касательные составляющие вектора усилий на поверхностях 1 const и 2 const в текущей конфигурации. На Рис. 1 штриховой линией в масштабе 1:1 показан контур деформированной пластины — поверхности 1 a и 2 a в текущей конфигурации, а также поверхность 2 0.5 a (тоже в текущей конфигурации) для которой на Рис. 2 представлены распределения нормальных составляющих вектора усилий на сетке 40 40 . Кривая 1 соответствуют линейной аппроксимации поля приращения перемещений, 2 — квадратичной и кубической, 3 — линейной аппроксимации с использованием процедуры восполнения напряжений. Рис. 1. Схема нагружения и конечно-элементное разбиение Рис. 2. Распределения нормальных составляющих вектора усилий Применение описанной процедуры восполнения напряжений позволяет получить поля напряжений той же точности (той же степени аппроксимации), что и поля перемещений. Для границы области, где заданы усилия, использование процедуры восполнения напряжений дает практически точные, в отличие от других методов, значения этих усилий для любой аппроксимации поля перемещений. Работа выполнена в рамках Программы поддержки ведущих научных школ (НШ–3717.2008.1) при поддержке Российского фонда фундаментальных исследований (07–01–96019). Литература 1. A.A. Rogovoy. The stress recovery procedure for the finite element method // Computers and Structures. 1997, V. 63, N. 6, P. 1121-1137. 2. Дж. Оден. Конечные элементы в нелинейной механике сплошных сред. М.: Мир. 1976, 464 с. 3. А.И. Лурье. Теория упругости. М.: Наука. 197, 939 с. 4. А.И. Лурье. Нелинейная теория упругости. М.: Наука. 1980, 512 с. 5. А.А. Роговой. Определяющие соотношения для конечных упруго-неупругих деформаций // ПМТФ. 2005, Т. 46, N. 5, С. 138-149.