Рис. 7.4 Рис. 7.5
advertisement

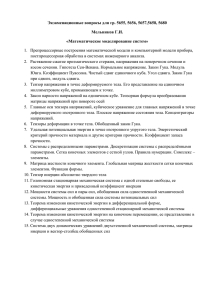
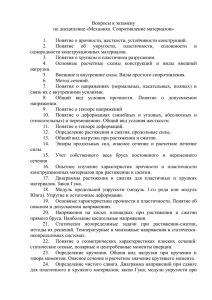
Лекция № 23 Тема 9. РАСЧЕТ СЖАТЫХ СТЕРЖНЕЙ НА УСТОЙЧИВОСТЬ. ПРОДОЛЬНО-ПОПЕРЕЧНЫЙ ИЗГИБ 9.1. Устойчивые и неустойчивые системы Устойчивость систем можно проиллюстрировать рисунками ( 8.1 ). На ( рис.8.1,а ) изображена устойчивая система, на ( рис. 8.1,б ) неустойчивая, на ( рис.8.1,в ) - безразличная, и на ( рис.8.1,г ) - устойчивая “в малом”, но не устойчивая “в большом”. Системой называется устойчивой, если она при малых возмущениях не переходит к качественно новому состоянию. Пусть на систему действуют силы, которые а б в г будем увеличивать. При определенном значении Рис.8..1 сил, система не вернется в первоначальную форму равновесия, а останется в новой форме равновесия. Момент перехода форм называется, бифуркацией, а силы, действующие на систему в этот момент, - критическими FKP . Переход к новому состоянию равновесия, называется потерей устойчивости. При потере устойчивости возможны возникновение пластических деформаций и разрушение, продолжение работы, незатухающие колебания. Второй и третий варианты мы рассматривать не будем. Поэтому считаем, что критические силы являются предельными для конструкции. Рабочая нагрузка F должна быть в ny раз меньше критической F n У KP . F Здесь ny - коэффициент запаса устойчивости. При F = FКР в конструкции возникают критические напряжения KP . F KP KP . Для сжатого стержня A 9.2. Задача Эйлера Пусть стержень сжимается силой F ( рис. 8.2 ). Когда сила F достигнет критического значения F FKP , то стержень изогнется. Используем приближенное дифференциальное уравнение изогнутой оси " балки при малых деформациях EIv M . В сечении стержня возникает изгибающий момент M FKP v , тогда 2 " 2 EIy " FKP v , или EIv " FKP v 0 , или v k v 0 , где k FKP . EI Общий интеграл этого дифференциального уравнения y y имеет вид: FKP FKP v A sin kz B cos kz . z Для нахождения постоянных интегрирования, испольz зуем условия на опорах стержня: при z 0 , v 0 , отсюда B 0 ; l v 0 , то есть при z l , Рис.8.2. A sin kl 0 . Здесь A 0 , так как, если A 0 , то vz 0 , то есть стержень прямой, что противоречит условию задачи. n n 2 2 2 k k , n 1,2,3,.... . Значит, sin kl 0 , kl n , , l l2 n 0 , vz 0 , то есть стержень прямой, что противоречит При условию задачи. Откуда величины критических сил n 2 2 EI 2 FKP k EI , n 1,2,3... . l2 2 EI F n 1 При получим минимальное значение критической силы KP . l2 Надо учесть, что потеря устойчивости происходят в направлении наименьшей жесткости, перпендикулярно плоскости, проходящей через ось стержня и главную центральную ось, относительно которой I I MIN . Тогда FKP 2 EI MIN . В уравнении прогибов l2 v A sin z l величина l A v осталась неизвестной, но она должна быть достаточно мала, 2 чтобы можно было воспользоваться приближенным дифференциальным уравнением изогнутой оси балки. Случаи n 2,3 и так далее без дополнительных опор при статическом действии нагрузки не реализуются. 9.3. Влияние способов закрепления концов стержня на величину критической силы Ф.С.Ясинский свел различные случаи опирания стержня к случаю шарнирного опирания на концах и ввел так называемую « приведенную » длину ( рис. 8.3 ). Здесь l ПР l – « приведенная » длина, - коэффициент приведения длины. 2 FKP FKP FKP FKP FKP l l l 1 l 1 2 7 2 0.7 Рис.8.3 Окончательно 8. получаем формулу Эйлера 2 EI MIN FKP критической силы . l 2 Определяем критические напряжения для определения 2 E FKP 2 E I MIN 2 i MIN 2E 2E KP A l 2 A l 2 l 2 2 , i MIN l где величена называется гибкостью стержня. i MIN В выводе формулы для критических сил и напряжений, использовалось приближенное дифференциальное уравнение изогнутой оси балки. Это уравнение было выведено в предположении, что материал стержня подчиняется закону Гука. Таким образом, полученные зависимости можно применять только для значений напряжений, меньших или равных пределу пропорциональности 2E KP 2 ПЦ . Отсюда 2E . ПЦ Обозначим ПРЕД 2E . ПЦ Таким образом, формула Эйлера может применяться при ПРЕД . Определение критических напряжений для стержней, у которых меньше ПРЕД проводится с помощью экспериментов. Разделим стержни на три категории по их гибкости: 40 50 . 1. Стержни малой гибкости: 2. Стержни средней гибкости: 40 50 ПРЕД . ПРЕД . 3. Стержни большой гибкости: Стержни малой гибкости - это короткие толстые стержни, которые теряют несущую способность, вследствие возникновения пластических деформаций или разрушения. Критическое напряжение KP для них равно Т - для пластических материалов или В - для хрупких материалов. В стержнях средней гибкости на несущую способность влияют как пластические деформации, так и потеря устойчивости. Для стержней малой и средней гибкости Ф.С.Ясинский на основе экспериментов KP a в . предложил формулу Коэфиценты а и в для некоторых материалов приведены в таблице Материал а ( МПа ) в ( МПа ) ПРЕД Ст2, ст3. Ст5. Сталь 40. Дерево (сосна). Чугун. 100 100 90 110 80 310 464 321 29.3 776 1.14 3.26 1.16 0.194 12.0 9.4. Расчет по коэффициенту уменьшения допустимых напряжений Для сжатых стержней необходимо проводить две проверки: F 1) Проверка на прочность: 0 , A n где Т - для пластичных материалов, 0 n - для хрупких материалов. 0 n 1.4 1.7 - коэффициент запаса прочности. 2) Проверка на устойчивость: F КР , У A n У где n У 1.8 3.0 - коэффициент запаса устойчивости. n Разделим У на , получим: У KP , n У 0 где - коэффициент уменьшения основного допустимого напряжения. 0 1 . У . F Таким образом, две проверки заменяют одной A Лекция № 24 9.5. Продольно-поперечный изгиб Лекция № 25 Тема 10. ПРОЧНОСТЬ ПРИ НАПРЯЖЕНИЯХ, ЦИКЛИЧЕСКИ ИЗМЕНЯЮЩИХСЯ ВО ВРЕМЕНИ 7.1. Механизм усталостного разрушения Действиям циклических напряжений подвергается материал во многих конструкциях. При этом, несмотря на то, что значение возникающих максимальных напряжений меньше предела прочности, спустя некоторое время при действии переменного напряжения в конструкции возникают трещины, и она разрушается. Если рассмотреть место разрушения ( рис. 7.1 ), то можно увидеть гладкую ( блестящую ) зону 1 распространения усталостной трещины и зернистую зону 2 хрупкого разрушения ослабленного сечения. T max a a 1 2 min Рис. 7.1 c t Рис. 7.2 Микротрещины возникают в тех точках, где напряжения максимальны. Постепенно они сливаются в одну трещину, уменьшая при этом размер сечения конструкции, соответственно возрастает максимальное напряжение, и при достижении предельного напряжения, конструкция хрупко разрушается. Распространение трещины связывают с изменением структуры материала и называют - усталостью. Способность сопротивляться усталости называют выносливостью материала. Время от начала нагружения, до появления усталостной трещины, значительно больше времени, прошедшего от возникновения трещины до разрушения конструкции. При рассмотрении периодической циклической нагрузки обычно ограничиваются синусоидальным законом изменения напряжений ( рис. 7.2 ). max min min Здесь Т – время цикла или цикл ; m и a max 2 2 среднее напряжение и амплитуда переменного напряжения ( цикла ) ; max c a и min c a - максимальное и минимальное напряжения цикла. Для характеристики циклов нагружения используются коэффициент min a асимметрии цикла r или характеристика цикла k . max m Два цикла с одинаковыми r ( или равными k ) – называются подобными. Если r 1(k ) , то цикл называется симметричным. Если r 1(k ) , то цикл называется асимметричным, в частности, если r 0; (k 0.5) , то цикл называется пульсационным. 7.2. Расчет на выносливость При испытании материалов на выносливость обычно применяют цилиндрические полированные образцы диаметром -1 7 - 10 мм, длиной 70 – 100 мм. Прикладывают к ним напряжения, изменяющиеся по заданному циклу, и определяют число N(lg N) циклов до разрушения при данном max . Рис. 7.3. Каждой паре значений max и N соответствует точка ( рис. 7.3 ), соединяя которые получим кривую, называмую кривой усталости или кривой Веллера. Пределом выносливости r - называется максимальное напряжение цикла, при котором материал не разрушается при бесконечно большом числе циклов. Для большинства материалов не удается установить такое число циклов, пройдя которое, при дальнейшем испытании материал бы не разрушился ( цветные металлы, легированные стали, пластмассы ). В этом случае вводят условный предел выносливости --1N при базовом числе циклов N0 , например, для цветных металлов и их сплавов N0=108 циклов. При симметричном цикле предел выносливости обозначается σ-1. Для обычных сталей -1 (0.40.5) В, τ-1 0.56σ-1 для кручения, для высокопрочных сталей -1 400+1/6В, для хрупких материалов -1 0.8-1. На величину предела выносливости влияют: форма детали, качество обработки поверхности, абсолютные размеры детали, вид цикла изменения напряжений, частота циклов, эксплутационные и другие факторы. Влияние формы детали ( концентрации напряжений ). Учитывается 1 эффективным коэффициентом концентрации K . Здесь σ1 - предел 1К выносливости стандартного образца, 1К - предел выносливости образца с концентратором, K 1 . Влияние абсолютных размеров. Учитывается масштабным фактором 1д : 1 . Здесь -1Д – предел выносливости образца заданного 1 размера. Чем больше размер образца, тем предел выносливости ниже. Влияние качества обработанной поверхности. Учитывается коэффи 1п циентом качества поверхности ; 1 . 1n - предел выносли 1 вости образца с заданной обработкой поверхности. При этом учитывается влияние механической ( точение, шлифование, полировка, накатывание, дробеструйная обработка ), термической ( закалка, отпуск ), химической ( азортирование) и других видов обработки поверхности. Лекция № 26 Влияние вида цикла изменения напряжений. Для этого построем диаграмму усталостной прочности a а r (k ) -1 B =с 0 const 1 n= 2 1 0 D к A m Вр m 45 max П ( Т ) 45 m материала. При испытаниях задаем m и путем подбора определяем такую величину a, при котором материал выдерживает базовое число циклов нагружения.. Откладываем эти точки при разных r ( рис. 7.4 ) и получаем диаграмму предельных амплитуд. Рис. 7.4 Рис. 7.5 Затем, для действующего на деталь цикла напряжений, находим a и m и откладываем рабочую точку Е. Через начало координат и рабочую точку проведем луч ОЕ, на котором расположены все циклы , подобные действующему. Луч пересекает диаграмму предельных амплитуд в точке D, которой соответствует предельный подобный цикл. Если точка Е лежит на отрезке OD, то деталь выдержит число циклов нагружения , равное или большее базового числа циклов, а если за точкой D - то разрушение произойдет при числе циклов, меньшем, чем базовое. Для более точного расчета необходимо откорректировать a и m с учетом концентрации напряжений, состояния поверхности и масштабного фактор. OD Величина n называется запасом усталостной прочности OE или коэффициентом запаса прочности по выносливости. Такие испытания достаточно дороги и продолжительны. Поэтому применяют упрощенные – схематизированные диаграммы. Простейшая такая схематизация состоит в том, что кривую диаграммы усталой прочности заменяют прямой AB ( рис. 7.4 ). При этом погрешность определения коэффициента запаса прочности по выносливости идет в запас прочности детали. Иногда применяют более точную диаграмму ( рис. 7.5 ), построенную по трем сериям испытаний образцов при действии постоянной нагрузки, симметричном и пульсирующем циклах. Формула, по которой находится коэффициент запаса усталостной прочности, зависит от выбранной схематизированной диаграммы. Учитывая влияние перечисленных выше факторов на величину предела выносливости, можно получить K 1 1 1 k 1 n n , где k a m k a m = tg ( рис. 7.5 ). Для касательных напряжений все величины аналогичны соответствующим величинам для нормальных напряжений. Для углеродистых сталей = 0,1 – 0,2 , = 0,05 – 0,1 . Для легированных сталей = 0,2 – 0,3 , = 0,1 – 0,15. Кроме коэффициента запаса усталостной прочности должен быть найден коэффициент запаса прочности по текучести для нормальных и касательных напряжений n Т a m n Т a m При отсутствии справочных данных можно приближенно принять: для углеродистых сталей -1 0,4 В , -1 0,6 -1 , для легированных сталей -1 0,5 В , для высоколегированных сталей -1 400 + В/6 ( Мпа) , -1 0,8 -1 , Т Т В 3 В 3 Зная, что предел выносливости зависит от рассмотренных выше факторов, для повышения выносливости можно применить следующие конструктивные и технологические способы : - уменьшение отрицательного влияния концентраторов напряжений путем выведения их в менее нагруженные зоны ; - конструктивное снижение концентрации напряжений путем исключения резких перепадов жесткостей и обеспечения плавного изменения профилей сечений, например, проектирование галтелей при резком изменении формы и размеров деталей; - повышением жесткости стыков путем перехода от открытых профилей к замкнутым и использования объемных вставок и мембран ; - проведение термической обработки поверхности детали, а также ее шлифование или полирование. 7.3. Выносливость при совместном действии изгиба и кручения В ряде деталей, например в валах, напряжения изгиба и кручения меняются синфазно, то есть достигают своих максимальных и минимальных значений одновременно. Для симметричного цикла можно получить диаграмму предельных напряжении. Затем находим коэффициент запаса усталостной прочности в предположении, что = 0 1 n 1 а и коэффициент запаса усталостной прочности в предположении, что = 0. n 1 1 а При изгибе с кручением возникает сложное напряженное состояние, при котором коэффициент запаса прочности при выносливости находится по формуле Гаффа и Полларда n n n 2 2 . n n Кроме вычисления коэффициента запаса усталостной прочности, должен быть найден коэффициент запаса статической прочности. Лекция № 27 Тема 11. ДИНАМИЧЕСКАЯ НАГРУЗКА. УПРУГИЕ КОЛЕБАНИЯ 11.1 Расчет равноускоренно движущегося тела Если при нагружении конструкции в ее элементах возникают такие ускорения, что возникает сила инерции , пренебречь которой нельзя, то нагрузка называется динамической. Подъем груза с ускорением. a Груз весом Q ( рис. 5.1,а ) q ст подвешивают на тросе сечением А, z изготовленном из материала с Qтр Q Q тр+ A z удельным весом тр . Поднимем груз с ускорением а. Согласно Q Q Fин= а) б) Q+ A z a g в) принципу Даламбера, в этом случае задачу можно рассматривать как статическую, если к действующим силам прибавить силы инерции Fин=-ma, Рис. 5.1 Q -масса груза, g – ускорение силы тяжести. g Если а=0 - это статический случай ( рис. 5.1б ) и силы инерции равны N ст Q Q тр . нулю, то где m Здесь Q тр Az - вес части троса ниже сечения. Если а0, то, Q тр Q a N Д Q тр Q a a (Q тр Q) 1 g g g а КД = 1 g Обозначим ( 5.1 ) - динамический коэффициент и получим N Д к Д Nст . Аналогично Д к Д ст , l Д к Д l ст . Динамический коэффициент показывает, во сколько раз динамические усилия, нагрузки и перемещения больше, чем статические. Условие прочности в этом случае запишется Д к Д ст . Подъем балки с ускорением. Рассмотрим два варианта подъема длинного стержня (балки). При этом не будем затрагивать вопросы техники безопасности при подъемно-транспортных работах . Первый вариант – трос крепится посередине длины балки ( рис. 5.2 ). a l/ 2 l/ 2 Рис. 5.3 a q Д A1 g а) В когда l/2 l/2 Рис. 5.2 самом начале перемещения, балка изгибается, ее различные сечения имеют MX M б) различные ускорения а, поэтому интенсивность сил инерции по длине балки неравномерна ( рис.5.3 ). Однако при достаточной жесткости балки и большой высоте подъема можно считать ее равномерной. Рис. 5.4 Интенсивность статической нагрузки q A . a q Д A1 . g С учетом ( 5.1 ) интенсивность динамической нагрузки Таким образом, расчетная схема балки имеет вид ( рис. 5.4,а ). Эпюры изгибающих моментов представлены на рис. 5.4б. Максимальный изгибающий момент Второй вариант – трос раздваивается и крепится к концам балки ( рис. 5.5,а ). Также считаем ускорения а равномерными по длине балки и интенсивность динамической нагрузки a q Д A1 . g Mxmax l l Al 2 a 1 . qД 2 4 8 g RA а) a TA HA l qД б) в) Mxmax Расчетная схема имеет вид ( рис. 5.5,б ). Эпюра изгибающих моментов показана на рис.5.5,в. Al 2 a 1 , Максимальный изгибающий момент равен 8 g то есть такой же, как и в первом случае. Однако, вследствие угла наклона троса, возникает продольная сила, сжимающая балку Mxmax l ctg . С уменьшением угла сжимающая 2 сила растет. С точки зрения прочности второй вариант менее предпочтителен, так как возникает продольно – поперечный изгиб. Чтобы удовлетворить условиям безопасности и прочности, используют траверзы – специальные конструкции, которые позволяют так крепить изделие при подъеме, чтобы 90 . H A H B R A ctg q Д 11.2. Расчет тонкостенного вращающегося кольца Рассмотрим относительно тонкое кольцо ( рис. 5.6 ) со средним диаметром D=2R, площадью поперечного сечения А, изготовленное из материала с удельным весом , вращающееся вокруг своей оси с угловым скоростью . При вращении возникает центробежная сила инерции Fцб m R . Проведем два радиальных сечения кольца I-I и II-II, 2 наклоненные к горизонтальной плоскости под углами и d . Рассмотрим участок кольца между этими сечениями. D D dS Rd d . Вес этого участка. dQ A d . Масса 2 2 вырезанного участка dS d dQ dm . g dFцб A Сила, действующая на этот участок А 2 D 2 dFцб d . A B g 4 Найдем вертикальную составляющую этой силы УД . ВЕС верт dFцб dFцб sin Разрежем кольцо горизонтальной плоскостью. Мысленно отбросим нижнее полукольцо и заменим его D действие продольными силами, действующими в сечении. Спроектируем все силы, действующие на верхнее полукольцо, на вертикальную ось. NД NД dF верт цб 2N Д 0 , отсюда 0 2 N Д D 2 А 2 D NД и Д . А g 2 g 2 Так как линейная скорость R Д , 2 имеем g D , то из условия прочности 2 g . Лекция № 28 11.3. Вращение рамы вокруг оси Рассмотрим раму, вращающуюся вокруг вертикальной оси с угловой скоростью ( рис. 5.7 ). Центробежные силы инерции, возникающие в A 2 q r. единичном участке длины. Д g Расчетная Рис. 5.7 схема рамы приведена на рис. 5.8,а. Здесь q Др и q Дст - интенсивности динамической нагрузки на ригеле и q Др m 2 r а) стойке. Эпюра q Др на ригеле приведена на рис 5.8,б. Найдем продольные силы. A q Дст 2l g l r q Дст l q Дстl A g A 2g . 2 r 2 Эп.q Др r в) 2 l 2 r 2 . qul N Эпюра продольных сил приведена на рис. 5.8,в. Эпюра изгибающих моментов приведена на рис. 5.8,г. Тогда условие прочности запишется max A 2 l g б) N q Дст l q Др dz 2 l A 2 r g г) M A 2l 2 q Дстl 2g l2 q Дст 2 N MX A WX 2 q Дст l 2 l 2 q Дст l A 2 g 2 W 11.4. Приближенная теория удара F Удар - это взаимное движение тел в результате их соприкосновения, связанное с резким изменением скоростей точек этих тел за весьма малый промежуток времени. Удар состоит из двух фаз ( рис. 5.9): фазы F фаза Фаза восстановления. t сближения тел и фазы восстановления ( расхождения тел) . Импульс силы удара равен; S F (t )dt . Его легко вычислить, так как он равен изменению количества движения. Но отдельно вычислить Fmax очень сложно, Рис. 5.9 поэтому обычно применяют приближенную теорию удара, вводя следующие допущения: 1) напряжения прямо пропорциональны перемещениям; 2) удар не упругий, и после удара ударяющее тело и безмассовая система движутся вместе; (z) Д Q Д 3) эпюры перемещений упругой системы h от груза Q, падающего с высоты h, в любой момент времени подобна эпюре Q перемещений той же системы от груза Q, действующего статически ( рис. 5.10 ); 4) местными напряжениями и потерями z СТ (z)CT энергии на контактные деформации Рис. 5.10 пренебрегаем. Выведем формулу для динамического коэффициента. Пусть груз Q падает с высоты h и соприкасается с упругой системой, затем движется с ней и в тот момент, когда система перемещается на максимальную величину Д , они останавливаются. В момент остановки скорость системы равна нулю, то есть кинетическая энергия системы равно нулю, и полная энергия будет равна потенциальной энергии деформации. Эта энергия будет равна работе внешних сил U A Р Q(h Д ) . При статическом действии Q Д Д . силы F K Д Q потенциальная энергия деформации равна U 2 ст Так при ударе груза Q и действии силы F деформации системы одинаковы, то и величины потенциальной энергии деформации тоже одинаковы. Приравнивая эти выражения, получим 2 1 Д Q Д Д h 0 ; 2Д 2ст Д 2hст 0 . Q(h Д ) Д ; 2 ст 2 СТ Решение последнего уравнения Д ст ст 2h ст . Знак минус не подходит, так как динамическое перемещение больше статического. 2 Разделим обе части этого уравнения на коэффициент при ударе KД Д ст ст 1 1 2h ст и найдем динамический Условие прочности при ударе запишется Д K Д CT . При внезапном приложении нагрузки h = 0, и KД = 2. ( 5.2 ) Примеры расчетов на удар. Сжимающий удар ( рис. 5.11 ). Статическое перемещение - СТ Ql . EА Q Динамический коэффициент K Д 1 1 Динамические напряжения g max 2hEF . Ql Q KД . А Рис. 5.11 Изгибающий удар в середину однопролетной балки ( рис. 5.12 ). Q Ql 3 Статический прогиб CT 48EI Динамические напряжения Ql \ 2 \ 2 K Д 4 WХ Рис. 5.12 Д Более точные результаты получаются, если учесть массу ударяемой системы. Пусть груз весом Q1 падает с высоты h на систему весом Q2. Тогда KД 1 1 2h Q2 . ст 1 Q 1 Если ударяемая система является системой с распределенной массой, то необходимо привести массу к точке удара. Для этого используется коэффициент приведения , показывающий, какую часть массы системы нужно приложить в данной точке невесомой системы, чтобы инерционность этих систем была бы одинаковой. При продольном ударе = 1/3, при изгибающем ударе в середину пролета балки = 17/35. При этом динамический коэффициент запишется : K Д 1 1 2h . Q2 CT 1 Q 1 Лекция № 29 11.5. Степени свободы упругих систем Число степеней свободы системы при колебаниях равно числу независимых возможных смещений масс упругой системы ( рис. 6.1). Для определения числа степеней свободы упругих систем с сосредоточенными массами необходимо путем постановки связей, ( рис. 6.2 ), привести систему к такому состоянию, когда будут m невозможными смещения масс. v1 Наименьшее количество таких связей будет равно числу степеней свободы упругой системы. Число степеней свободы не всегда совпадает с числом масс. Число степеней своv2 боды не зависит от того, является ли данная Рис система статически определимой или стати.10. чески неопределимой. Системы с распреде1. ленной массой ( собственный вес ) имеют бесконечное число степеней свободы. Упругие системы с одной степенью свободы имеют одну круговую частоту свободных колебаний, которой соответствует m3 m1 одна форма колебаний. Упругие системы с n степенями свободы имеют n круговых частот свободных колебаний, которым соответствуют n форм колебаний. Упругие системы с бесконечным числом степеней свободы имеРис. ют бесконечное число круговых частот свободных колебаний, которым соответствуют бесконечное число форм колебаний. Совокупность всех круговых частот свободных колебаний упругой системы называется спектром частот. m2 11.6. Свободные колебания системы с одной степенью свободы Пусть на систему с одной степенью свободы ( рис. 6.3 ) не действуют внешние нагрузки. Она может совершать колебательные движения при начальном возбуждении или начальном перемещении массы. При d2v 1 m .. колебаниях на систему действует сила инерции массы m v1 . dt 2 Здесь v v t - уравнение движения массы m. Приложим в направлении 1 1 движения массы фиктивную единичную силу _ Ф 1. Перемещение от этой силы в её 1 направлении будет 11, перемещение массы от v δ mv . силы инерции будет 1 11 1 m1 v1 Рис.6.3. Знак минус возникает потому, что сила инерции направлена против ускорения. Переносим все члены влево и получим дифференцильное уравнение, описывающее свободные колебания системы с одной степенью свободы v δ mv 0 . ( 6.1 ) 1 11 1 Решение этого дифференцильного уравнения будем искать в виде v A sin ωt . Дифференцируем два раза это выражение и получаем 1 1 v A ω 2sin ωt . Подставим v1 и v 1 в уравнение ( 6.1 ) и сократим на 1 sin(t+). Тогда A1 δ m ω2 0 Амплитуда колебания A10, так как в 11 1 противном случае колебания не возникают . Значит 1 δ m ω 2 0 . 11 1 Величина частоты свободных колебаний запишется g g 1 1 . ( 6.2 ) ω Q δ m δ Q Δ ст δ 11 1 11 11 g Колебания имеют вид vt Asin ωt . Постоянные A и определяем из начальных условий. Пусть в начальный момент времени, при t = 0, массе дают начальное смещение v (t = 0 ) = v0 и начальную скорость . v(t 0) V . Разделим начальное смещение на начальную скорость 0 v v v Asin ωt t 0 vt 1 0, 0 , 0. tg tg ω . ω V V Aω cos ωt V t 0 vt t 0 0 0 0 2 V Из этой формулы находим фазовый угол . Сложим v 2 и 0 . 0 ω2 V2 2 v 0 A 2sin 2 ωt A 2ω2cos2 ωt / 2 A 2 0 ω2 V2 2 A v 0 . 0 ω2 откуда найдем амплитуду колебаний 2π 2π ст . ω g Найдем число колебаний системы в одну минуту через n. Тогда T Период колебаний n g g 1 60ω 30 30 . 30 2 2 Δ ст Δ Δ ст cт Пример на определение собственой частоты колебаний. Рассмотрим невесомую балку - консоль с грузом Q на свободном конце ( рис. 6.4 ). Используем выражение для перемещения конца балки-консоли и запишем статическое перемещение груза Q и значение первой собственной частоты свободных колебаний Q QL3 Δ ст 3EI x ω 3gEI x QL3 L Рис. 10.4 11.7. Вынужденные колебания системы с одной степенью свободы Расмотрим задачу, аналогичную предыдущей. Пусть к сосредоточенной массе системы приложена Fsint заданная возмущающая нагрузка Fsint ( рис. 10.5 ). Тогда действие этой нагрузки добавится к силе инерции m .. v δ Fsinνs δ m v , 1 11 11 1 .. δ m v v δ Fsinν t , v1 11 1 1 11 .. 1 F v v sinν t. . 1 m 1 m 11 Рис. 10.5 .. F 1 ρ , тогда ω2 ; Обозначим ( 6.3 ) v ω2 v ρsinνt 1 1 m m 11 Общий интеграл этого дифференциального уравнения имеет вид v t C cosω t C sinω t v* t . 1 1 2 Первые два члена – общее решение уравнения, а третий член частное решение, которое будем искать в виде v*t Asinν t . v*t A νcosνt , Дифференцируем два раза: v*t Aν 2sinν t и подставим в уравнение ( 6.3 ) Aν 2sinν t ω2Asinν t ρsinνt . Находим амплитуду вынужденных колебаний A ω2 ν 2 ρ , A ρ ω2 ν 2 F m 2 1 ν δ m ω2 11 1 Fδ 11 Δ cт F K Δ F . д ст 2 ν2 ν 1 1 2 2 ω ω Таким образом динамический коэффициент при вынужденных колебаниях, называемый также коэффициентом нарастания колебаний, 1 будет равен . Kд 2 ν 1 ω2 Если учесть силы сопротивления, пропорциональные первой степени . скорости R r vt , то 1 . Kд 2 2 2 2 1 ν 4 r ν 2mω ω ω2 Условие прочности при вынужденных колебаниях запишется σ max д σ ст Q K д σ ст F σ .