Лекция 2. Классификация и требования, предъявляемые к САР
реклама

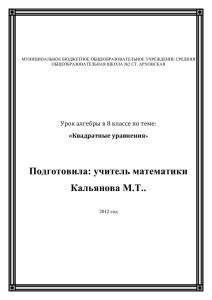
ЛЕКЦИЯ №2. КЛАССИФИКАЦИЯ И ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К САР. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ САР. ОБЩИЙ МЕТОД ЛИНЕАРИЗАЦИИ (Слайд 1) 2.1. Классификация САР (Слайд 2) САР классифицируются по различным признакам. По характеру функционирования САР разделяют на 4 класса: Системы автоматической стабилизации (характеризуются тем, что в процессе работы системы задающее воздействие остается постоянным). Пример: стабилизатор скорости вращения двигателя. Системы программного регулирования (задающее воздействие изменяется по заранее установленному закону, как функция времени и координат системы). Пример: автопилот. Следящие системы (задающее воздействие является величиной переменной, но математическое описание по времени не может быть установлено, т.к. источником сигнала является внешнее воздействие, закон перемещения которого заранее не известен). Пример: радиолокационная станция сопровождения самолета. Адаптивные или самонастраивающиеся системы (такие системы автоматически выбирают оптимальный закон регулирования и могут в процессе работы изменять характеристики регулятора). Пример: компьютерная игра с нелинейным сюжетом. (Слайд 3) Так же САР разделяют по характеру сигналов в устройстве управления: Непрерывные (входной и выходной сигнал непрерывные функции времени). Пример: компараторы, операционные усилители. Релейные (если в системе имеется хотя бы один элемент с релейной характеристикой). Пример: различные реле, аналоговые ключи и мультиплексоры. Импульсные (характеризуется наличием хотя бы одного импульсного элемента). Пример: тиристоры, цифровые схемы. Все САР можно разделить по зависимости выходных характеристик от входных на линейные и нелинейные. 2.2. Требования предъявляемые к САР (Слайд 4) 1. Регулируемая величина должна поддерживаться на заданном уровне независимо от возмущения. Переходный процесс представляется динами1 ческой характеристикой, по которой можно судить о качестве работы системы. 2. Должно выполняться условие устойчивости, т.е. система должна обладать запасом устойчивости. 3. Быстродействие – время переходного процесса, характеризующее быстроту реакции системы. (Слайд 5) 4. Должны выполняться нормы перерегулирования. Для определения величины перерегулирования используются два основных параметра: Коэффициент перерегулирования y m y 100 % , ym где ym – максимальное отклонение выходной величины во время переходного процесса, y∞ – значение выходной величины в установившемся режиме. Допустимое значение = 0 25 %. (Слайд 6) Мера колебательности процесса – число колебаний за время переходного процесса (не более 2-х) 5. Должны выполнение требования статической точности. Если в системе процессы случайные, то для обеспечения точности вводятся вероятностные характеристики. 2.3. Линейные и нелинейные САР Динамические процессы в системах регулирования описываются дифференциальными уравнениями. (Слайд 7) В линейных системах процессы описываются при помощи линейных дифференциальных уравнений. В нелинейных системах процессы описываются уравнениями, содержащими какие-либо нелинейности. Расчеты линейных систем хорошо разработаны и более просты для практического применения. Расчеты же нелинейных систем часто связаны с большими трудностями. Чтобы система регулирования была линейной, необходимо (но недостаточно) иметь статические характеристики всех звеньев в виде прямых линий. В действительности реальные статические характеристики в большинстве случаев не являются прямолинейными. Поэтому, чтобы рассчитать реальную систему как линейную, необходимо все криволинейные статические характеристики звеньев на рабочих участках, которые используются в данном процессе регулирования, заменить прямолинейными отрезками. Это называется линеаризацией. Большинство систем непрерывного регулирования поддаётся такой линеаризации. (Слайд 8) 2 Линейные системы разделяются на обыкновенные линейные системы и на особые линейные системы. К первым относятся такие системы, все звенья которых описываются обыкновенными линейными дифференциальными уравнениями с постоянными коэффициентами. (Слайд 9) К особым линейным системам относятся: а) системы с переменными по времени параметрами, которые описываются линейными дифференциальными уравнениями с переменными коэффициентами; б) системы с распределёнными параметрами, где приходится иметь дело с уравнениями в частных производных, и системы с временным запаздыванием, описываемые уравнениями с запаздывающим аргументом; (Слайд 10) в) импульсные системы, где приходится иметь дело с разностными уравнениями. (Слайд 11) а х2 б х2 в х1 г х2 х1 д х2 х2 х1 е х1 ж х2 х2 х1 и х2 х1 к х1 х1 Рис. 2.1. Характеристики нелинейных элементов 3 х2 х1 В нелинейных системах при анализе процесса регулирования приходится учитывать нелинейность статической характеристики хотя бы в одном её звене или какие-то нелинейные дифференциальные зависимости в уравнениях динамики системы. Иногда нелинейные звенья специально вводятся в систему для обеспечения наибольшего быстродействия или других желаемых качеств. К нелинейным системам относятся прежде всего релейные системы, так как релейная характеристика (рис. 2.1, а и б) не может быть заменена одной прямой линией. Нелинейным будет звено, в характеристике которого имеется зона нечувствительности (рис. 2.1, в). Явления насыщения или механического ограничения хода приводят к характеристике с ограничением линейной зависимости на концах (рис. 2.1, г). Эта характеристика также должна считаться нелинейной, если рассматриваются такие процессы, когда рабочая точка выходит за пределы линейного участка характеристики. К нелинейным зависимостям относятся также гистерезисная кривая (рис. 2.1, д), характеристика зазора в механической передаче (рис. 2.1, е), сухое трение (рис. 2.1, ж), квадратичное трение (рис. 2.1, и) и др. В последних двух характеристиках x1 обозначает скорость перемещения, а x2 – силу или момент трения. Нелинейной является вообще любая криволинейная зависимость между выходной и входной величинами звена (рис. 2.1, к). Это нелинейности простейшего типа. Кроме того, нелинейности могут входить в дифференциальные уравнения в виде произведения переменных величин и их производных, а также в виде более сложных функциональных зависимостей. Не все нелинейные зависимости поддаются простой линеаризации. Так, например, линеаризация не может быть сделана для характеристик, изображенных на рис. 2.1, а или на рис. 2.1, е. Подобные сложные случаи будут рассмотрены в разд. 9. 2.4. Общий метод линеаризации (Слайд 12) В большинстве случаев можно линеаризовать нелинейные зависимости, используя метод малых отклонений или вариаций. Для рассмотрения его обратимся к некоторому звену системы автоматического регулирования (рис. 2.2). Входная и выходная величины обозначены через X1 и X2, а внешнее возмущение – через F(t). Допустим, что звено описывается некоторым нелинейным дифференциальным уравнением вида 4 F(t) х1 х2 Звено Рис. 2.2. Звено САР f X 1, X 1, X 2 , X 2 , X 2 F t . (2.1) Для составления такого уравнения нужно использовать соответствующую отрасль технических наук (например электротехнику, механику, гидравлику и т. п.), изучающую этот конкретный вид устройства. (Слайд 13) Основанием для линеаризации служит предположение о достаточной малости отх2 g клонений всех переменных, входящих в уравнение динамики звена, так как именно C х20 на достаточно малом участке криволинейА ную характеристику можно заменить отрезВ ком прямой. Отклонения переменных отсчитываются при этом от их значений в установившемся процессе или в определенном х10 х1 равновесном состоянии системы. Пусть, например, установившийся процесс характеризуется постоянным значением переменРис. 2.3. Процесс регулирования в звене ной Х1, которое обозначим Х10. В процессе регулирования (рис. 2.3) переменная Х1 будет иметь значения X 1 t X 10 X 1 t X 10 x1 t , где X 1 t x1 t обозначает отклонение переменной X1 от установившегося значения Х10. Аналогичные соотношения вводятся для других переменных. Для рассматриваемого случая имеем: X 2 t X 20 X 2 t X 20 x2 t , а также F t F0 F t . (Слайд 14) Далее можно записать: X 1 x1; X 2 x2 и X 2 x2 , так как X 10 const и X 20 const Все отклонения предполагаются достаточно малыми. Это математическое предположение не противоречит физическому смыслу задачи, так как сама идея автоматического регулирования требует, чтобы все отклонения регулируемой величины в процессе регулирования были достаточно малыми. 5 Установившееся состояние звена определяется значениями Х10, Х20 и F0. Тогда уравнение (2.1) может быть записано для установившего состояния в виде f X 10 , 0, X 20 , 0, 0 F0 . (2.2) (Слайд 15) Разложим левую часть уравнения (2.1) в ряд Тейлора f X 10 , 0, X 20 , 0, 0 (2.3) f f f f f x1 x1 x2 x2 x2 F t X 1 0 X 1 0 X 2 0 X 2 0 X 2 0 где – члены высшего порядка. Индекс 0 при частных производных означает, что после взятия производной в её выражение надо подставить установившееся значение всех переменных X 1 X 10 ; X 1 0 ; X 2 X 20 ; X 2 X 2 0 . В состав членов высшего порядка в формуле (2.3) входят высшие частные производные, умноженные на квадраты, кубы и более высокие степени отклонений, а также произведения отклонений. Они будут малыми высшего порядка по сравнению с самими отклонениями, которые являются малыми первого порядка. (Слайд 16) Уравнение (2.3) является уравнением динамики звена, так же как (2.1), но записано в другой форме. Отбросим в этом уравнении малые высшего порядка, после чего из уравнения (2.3) вычтем уравнения установившегося состояния (2.2). В результате получим следующее приближённое уравнение динамики звена в малых отклонениях: f f f f f x1 x1 x2 x2 x2 F t X X X X X 1 0 1 0 2 0 2 0 2 0 (2.4) В это уравнение все переменные и их производные входят линейно, то есть в первой степени. Все частные производные представляют собой некоторые постоянные коэффициенты в том случае, если исследуется система с постоянными параметрами. Если же система имеет переменные параметры, то уравнение (2.4) будет иметь переменные коэффициенты. Рассмотрим только случай постоянных коэффициентов. (Слайд 17) Получение уравнения (2.4) является целью проделанной линеаризации. В теории автоматического регулирования принято записывать уравнения всех звеньев так, чтобы в левой части уравнения была выходная 6 величина, а все остальные члены переносятся в правую часть. При этом все члены уравнения делятся на коэффициент при выходной величине. В результате уравнение (2.4) принимает вид T22 x2 Ò1x2 x2 k1x1 k2 x1 k3 F , (2.5) где введены следующие обозначения f f f f 1 X 2 0 X 2 0 X 1 0 X 1 0 2 . T2 ; T1 ; k1 ; k2 ; k3 f f f f f X 2 0 X 2 0 X 2 0 X 2 0 X 2 0 (Слайд 18) Кроме того, для удобства принято все дифференциальные уравнения записывать в операторной форме с обозначениями dx d2x dnx x px; 2 p 2 x;... n p n x; x dt и т.д. dt p dt dt Тогда дифференциальное уравнение (2.5) запишется в виде T 2 2 2 p T1 p 1 x2 k1 k2 p x1 k3 F , (2.6) Эту запись будем называть стандартной формой записи уравнения динамики звена. Коэффициенты Т1 и Т2 имеют размерность времени – секунды. Это вытекает из того, что все слагаемые в уравнении (2.6) должны иметь одинаковую размерность, а например, размерность x 2 (или px2) отличается от размерности х2 на секунду в минус первой степени (с-1). Поэтому коэффициенты Т1 и Т2 называют постоянными времени. Коэффициент k1 имеет размерность выходной величины, деленную на размерность входной. Он называется коэффициентом передачи звена. Для звеньев, у которых выходная и входная величины имеют одинаковую размерность, используются также следующие термины: коэффициент усиления – для звена, представляющего собой усилитель или имеющего в своем составе усилитель; передаточное число – для редукторов, делителей напряжения, масштабирующих устройств и т. п. Коэффициент передачи характеризует статические свойства звена, так как в установившемся состоянии x2 k1x1 . Следовательно, он определяет крутизну статической характеристики при малых отклонениях. Если изобразить всю реальную статическую характеристику звена x2 f X 1 , то ли7 X неаризация дает x2 2 x1 или x2 k1x1 . Коэффициент передачи k1 X 1 0 будет представлять собой тангенс угла наклона g касательной в той точке C (см. рис. 2.3), от которой отсчитываются малые отклонения х1 и х2. Из рисунка видно, что проделанная выше линеаризация уравнения справедлива для процессов регулирования, захватывающих такой участок характеристики АВ, на котором касательная мало отличается от самой кривой. (Слайд 19) Кроме того, отсюда вытекает другой, графический способ линеаризации. Если известна статическая характеристика и точка C, определяющая установившееся состояние, около которого происходит процесс регулирования, то коэффициент передачи в уравнении звена определяется графически из чертежа по зависимости k1 = tgg c учетом масштабов чертежа и размерности x2. Во многих случаях графический метод линеаризации оказывается более удобным и быстрее приводит к цели. (Слайд 20) Размерность коэффициента k2 равна размерности коэффициента передачи k1, умноженной на время. Поэтому часто уравнение (2.6) записывают в виде T 2 2 2 p T1 p 1 x2 k1 1 T3 p x1 k3 F , k2 – постоянная времени. k1 Постоянные времени Т1, Т2 и Т3 определяют динамические свойства звена. Этот вопрос будет рассмотрен подробно ниже. Коэффициент k3 представляет собой коэффициент передачи по внешнему возмущению. где T3 8