Синхронные двигатели получили широкое распространение в
advertisement

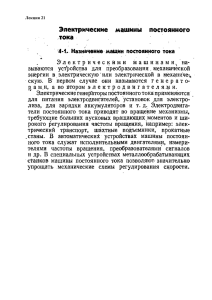
Синхронные двигатели получили широкое распространение в промышленности для электроприводов, работающих с постоянной скоростью (компрессоров, насосов и т.д.). В последнее время, вследствие появления преобразовательной полупроводниковой техники, разрабатываются регулируемые синхронные электроприводы. Синхронный двигатель несколько сложнее, чем асинхронный, но обладает рядом преимуществ, что позволяет применять его в ряде случаев вместо асинхронного. К таким преимуществам относятся: • возможность работы двигателя с опережающим coscp, благодаря чему повышается coscp предприятия в целом и уменьшается мощность компенсирующих устройств; • меньшая чувствительность к колебаниям напряжения в сети; • высокая перегрузочная способность и др. Возможны следующие способы пуска синхронного двигателя: асинхронный пуск на полное напряжение сети и пуск на пониженное напряжение через реактор или автотрансформатор. Схема возбуждения синхронного двигателя с глухоподключенным возбудителем (рис. 1.24, а) довольно проста и может применяться в том случае, если пусковые токи не вызывают падения напряжения в сети больше допустимого и статистический момент нагрузки Мс < 0,4 Мном. Асинхронный пуск синхронного двигателя производится присоединением статора к сети. Двигатель разгоняется как асинхронный до скорости вращения, близкой к синхронной. В процессе асинхронного пуска обмотка возбуждения замыкается на разрядное сопротивление (рис. 1.24, б), чтобы избежать пробоя обмотки возбуждения при пуске, так как при малой скорости ротора в ней могут возникнуть значительные перенапряжения. При скорости вращения, близкой к синхронной, срабатывает контактор КМ (цепь питания контактора на схеме не показана), обмотка возбуждения отключается от разрядного сопротивления и подключается к якорю возбудителя. Пуск заканчивается. Рис. 1.24. Типовые узлы схем возбуждения синхронного двигателя Разработаны также системы тиристорного возбуждения. Если пуск производится на пониженное напряжение, то при «легком» пуске возбуждение подается до включения обмотки статора на полное напряжение, а при «тяжелом» пуске подача возбуждения происходит при полном напряжении в цепи статора. Возможно подключение обмотки возбуждения двигателя к якорю возбудителя последовательно с разрядным сопротивлением (рис. 1.24, в). Процесс подачи возбуждения синхронному двигателю автоматизируется двумя способами: в функции скорости и в функции тока. На схеме, приведенной на рис. 1.25, подача возбуждения синхронному двигателю осуществляется с помощью электромагнитного реле постоянного тока КТ (реле времени с гильзой). Катушка реле включается на разрядное сопротивление Rразр через диод VD. При подключении обмотки статора к сети в обмотке возбуждения двигателя наводится ЭДС. По катушке реле КТ проходит выпрямленный ток, амплитуда и частота импульсов которого зависят от скольжения. Рис. 1.25. Подача возбуждения синхронному двигателю в функции скорости При пуске скольжение S = 1. По мере разгона двигателя оно уменьшается и интервалы между выпрямленными полуволнами тока возрастают; магнитный поток постепенно снижается по кривой Ф(t) (рис. 1.26). При скорости, близкой к синхронной, магнитный поток реле успевает достигнуть значения потока отпадания реле Фот в момент, когда через реле КТ ток не проходит. Реле теряет питание и своим контактом создает цепь питания контактора КМ (на схеме цепь питания контактора КМ не показана). Рассмотрим контроль подачи возбуждения в функции тока с помощью реле тока. При пусковом токе срабатывает реле тока КА (рис. 1.27, а) и размыкает свой контакт в цепи контактора КМ2 (рис. 1.27, б). Рис. 1.26. График изменения тока и магнитного потока в реле времени КТ Рис. 1.27. Контроль подачи возбуждения синхронному двигателю в функции тока При скорости, близкой к синхронной, реле КА отпадает и замыкает свой контакт в цепи контактора КМ2. Контактор КМ2 срабатывает, замыкает свой контакт в цепи возбуждения машины и шунтирует резистор Rразр. Глава сорок первая СПЕЦИАЛЬНЫЕ ТИПЫ СИНХРОННЫХ МАШИН § 41-1. Одноякорные преобразователи В обмотке якоря машины постоянного тока протекает переменный ток. Если соединить эту обмотку также с контактными кольцами (рис. 41-1, а), то на них получим напряжение переменного тока U ^. Такая машина называется о д н о я -хорным преобразователем. Питание ее обмотки возбуждения постоянным током производится обычно со стороны коллектора, так же как в машинах постоянного тока с параллельным возбуждением. Поэтому в конструктивном отношении одноякорный преобразователь предетавляет собой машину постоянного тока, снабженную контактными кольцами. Кольца помещают на валу со стороны, противоположной коллектору. ' Для улучшения коммутации машина имеет добавочные полюсы. Одноякорный преобразователь обычно используется для преобразования переменного тока в постоянный. При этом по отношению к сети переменного тока он работает как синхронный двигатель, а по отношению к сети постоянного тона — как генератор постоянного тока. На валу эта машина развивает лишь небольшой вращающий момент для покрытия механических, магнитных и добавочных потерь. Разность Р„ —Р_ равна потерям в машине. Машина может также преобразовывать постоянный ток в переменный. Одноякорный преобразователь Рис. "41-1. Принцип устройства (а) и схема (б) обыкновенного одноякорного преобразователя обычно пускается в ход по способу асинхронного пуска синхронного двигатели, для чего в его полюсных наконечниках помещается пусковая обмотка. При наличии напряжения в сети постоянного тока его можно пустить в ход так же, как двигатель постоянного тока, и затем синхронизировать с сетью переменного тока. Как известно, в режиме генератора активная составляющая тока якоря совпадает по фазе с э. д. с, а в режиме двигателя она направлена встречно э. д. с. Так как одноякорный преобразователь работает одновременно в режиме генератора и двигателя, то в обмотке якоря протекает разность токов /, и /.. Поэтому потери в обмотке якоря меньше, чем у обычных машин переменного тока. Поскольку формы кривых переменного и постоянного тока в секциях обмотки различны и в разных секциях кривые сдвинуты по фазе во времени на различные углы, то токи секций изменяются во времени по кривым сложной формы. Так как напряжения U„ и U_ действуют в одной и той же обмотке якоря, то их величины жестко связаны друг с другом. Если предположить, что поле возбуждения индуктирует в обмотке якоря чисто синусоидальные э. д. с , пренебречь сопротивлениями обмотки и принять, что количество секций обмотки очень велико, то векторная диаграмма э. д с. секции якоря будет иметь вид окружности (рис. 41-2). При этом напряжение U_ равно диаметру окружности, а амплитуда Um~ = \'W~ равна стороне т-угольника, вписанного в окружность, где т —• число фаз (на рис. 41-2 яг =6). На основании рис. 41-2 Например, при т= 3 и т= 6 соответственно Um~= 0,612 £/_ и и„ — 0,354 U_. Из сказанного следует, что если величина £/_. будет стандартной, то величина £У„ будет нестандартной, и наоборот. Поэтому обычно одноякорный преобразователь включается в сеть через трансформатор Тр, а часто дополнительно также через индуктивную катушку ИК (рис. 41-3). Путем изменения тока возбуждения машину можно нагружать индуктивным или емкостным током и тем самым за счет падения напряжения в индуктивной катушке регулировать в некоторых пределах напряжение £/_. Раньше одноякорные преобразователи широко применялись для питания контактных сетей трамвая и железных дорог и в других случаях. В настоящее Рис. 41-2. Векторная диаграмма э. д. с. и напряжений обмотки якоря одно-якорного преобразователя Рис. 41-3. Шестифазный одноякорный преобразователь с трансформатором и индуктивной катушкой время они в этих областях вытеснены ртутными и полупроводниковыми выпрямителями и используются в специальных случаях, притом также с раздельными обмотками переменного и постоянного тока. Одноякорный преобразователь можно использовать также в качестве генератора двух родов тока — постоянного и переменного, если вращать его с помощью какого-либо первичного двигателя. Такие генераторы в ряде случаев применяются на небольших судах и т д. При этом для получения напряжений необходимой величины на якоре помещают отдельные обмотки переменного и постоянного тока. Если обмотку постоянного тока использовать только для питания обмотки возбуждения, то получим своеобразный синхронный генератор с самовозбуждением. Такие генераторы мощностью до 5—10 кв-а также находят некоторое применение. § 41-2. Машины двойного питания Двигатель двойного питания по своей конструкции представляет собой асинхронную машину с фазным ротором, обе обмотки которой питаются переменным током обычно от общей сети, с параллельным или последовательным включением обмоток статора и ротора (рис. 41-4, а). Токи статора It и ротора /2 создают н. с. Fj, F2 и потоки Ф1( Ф2, которые вращаются соответственно относительно статора и ротора со скоростями пг = fjp. Эти н. с. и потоки вращаются синхронно, если где п — скорость вращения ротора и знак плюс относится к случаю, когда н. с. ротора вращается относительно ротора в сторону его вращения, а знак минус — когда это вращение происходит в обратном направлении. Согласно этому соотношению, в первом случае п = О, что не представляет практического интереса, и во втором случае т. е. скорость ротора равна двойной скорости обычной синхронной машины. При этом синхронно вращающиеся поля статора и ротора создают вращающий момент М, машина может работать в режимах двигателя и генератора и в сущности представляет собой синхронную машину. Момент М создается, когда пространственный угол 6 между J^ и F2 (рис. 41-4, б) отличен от нуля или 180°, так как в противном случае оси полюсов магнитных полей статора и ротора совпадают и тангенциальных усилий не создается. Машины двойного питания находят некоторое применение в специальных случаях в качестве двигателей. Их недостатком является то, что при пуске их нужно привести во вращение при помощи вспомогательного двигателя. Кроме того, их успокоительные моменты малы и эти машины подвержены качаниям. В общем случае возможно питание статора и ротора токами разных частот. Асинхронизированная синхронная машина, предложенная Л А. Горевым, отличается от обычной синхронной машины тем, что она имеет две обмотки возбуждения — одну по продольной и другую по поперечной оси. Поэтому ее ротор имеет в сущности двухфазную обмотку. В нормальном режиме работы обмотки возбуждения питаются постоянным током, и этот режим ничем не отличается от режима работы обычной синхронной машины. Однако в аварийных режимах, когда синхронное вращение ротора с полем статора нарушается (короткие замыкания в сети, качания ротора и пр.), обмотки возбуждения питаются переменными токами частоты скольжения, сдвинутыми по фазе на 90°, вследствие чего получается поле возбуждения, вращающееся относительно ротора. Частота токов возбуждения s/ x регулируется автоматически и непрерывно таким образом, что поля возбуждения и якоря вращаются синхронно, благодаря чему они создают вращающий момент постоянного знака. В результате машина не выпадает из синхронизма и устойчивость ее работы повышается, что и составляет преимущество данной машины. По своей природе рассмотренная машина аналогична машине двойного питания. Для реализации указанного преимущества этой машины кратность Рис. 41-4. Схема (а) и векторная диаграмма н. с. и потоков (б) машины двойного питания (потолок) напряжения возбуждения должна быть высокой (fym Э= 4 -*■ 5) и надо применять регуляторы сильного действия. Питание обмоток возбуждения целесообразно осуществлять от ионных или полупроводниковых преобразователей частоты. В настоящее время изготовлены опытные образцы асинхронизирован-ных синхронных машин. § 41-3. Синхронные двигатели малой мощности Для некоторых механизмов необходимы двигатели малой мощности с постоянной скоростью вращения (лентопротяжные механизмы киноаппаратов, электрические часы, аппараты и т. д ). В качестве таких двигателей применяются синхронные двигатели без обмоток возбуждения. Отсутствие обмоток возбуждения упрощает конструкцию двигателей и их эксплуатацию, а также повышает надежность их работы. Во многих случаях такие двигатели являются однофазными. Устройство статора многофазных маломощных синхронных двигателей, рассматриваемых в настоящем параграфе, ничем не отличается от устройства статора нормальных синхронных и асинхронных машин, а статоры однофазных синхронных двигателей имеют такое же устройство, как и статоры однофазных асинхронных двигателей (с рабочей и пусковой обмоткой, конденсаторные, с экранированными полюсами на статоре — см. § 30-2), и пуск однофазных синхронных и асинхронных двигателей производится одинаково (в конце пуска, синхронные двигатели втягиваются в синхронизм под действием синхронного* электромагнитного момента). Поэтому ниже рассматриваются особенности роторов синхронных двигателей без обмотки возбуждения. Сняхронные двигатели с постоянными магнитами имеют обычно цилиндриче-* екие роторы из магнитнотвердых сплавов (алии, алнико и др.) и, кроме того» пусковую обмотку в виде беличьей клетки. Ротор из магнитно-твердого сплава изготовляется путем литья и трудно поддается механической обработке. Поэтом^ выполнение в нем литой беличьей клетки невозможно. В связи с этим ротор изго* товляется обычно составным — обычный ротор короткозамкнугого асинхронного^ двигателя посредине и два г диска из магнитно-твердого сплава по краям. Исполц зование материалов таких двигателей получается малым, и поэтому они обычнее строятся мощностью до 30—40 вт. Генераторы с постоянными магнитами не. нуждаются в пусковой обмотке и строятся на мощность Р„= 5-«- 10 кв-а, 4-в ряде случаев до РИ = 100 кв-а. Однако ввиду дороговизны магнитно-тверды* сплавы применяются в специальных случаях, когда требуется повышенная яа' дежность в работе. Реактивные синхронные двигатели. Явнополюсные синхронные машины без обмотки возбуждения называются реактивными. Особенности работы таких машвя, уже были рассмотрены в § 35-3. Различные конструкции роторов синхронных реактивных двигателей изображены на рис. 41-5. Ротор, показанный на рис. 41-5, а, имеет наибольшее распространение, изготовляется из листовой электротехнической стали и снабжается пусковой обмоткой в виде беличьей клетки. Его полюсы имеют форму выступов!» Роторы, изображенные на рис. 41-5, б и в, изготовляются путем заливки сталь-* ных пакетов алюминием, причем алюминий выполняет роль'пусковой обмотки. Реактивные двигатели имеют низкий coscp и поэтому также низкий к. п. д< (при Ря = 20 -ь 40 вт к. п. д. %= 0,3 -з- 0,4), а их вес обычно больше вееф асинхронных двигателей такой же мощности. У однофазных конденсаторный реактивных синхронных двигателей cosq> улучшается за счет конденсаторов. Реактивные двигатели обычно строятся на мощности до 50—100 вт, нЩ когда большое значение имеет простая конструкция и повышенная надежности они строятся также и на значительно большие мощности. Синхронные гистерезисные двигатели. Низкие энергетические и неблаго* приятные весовые показатели синхронных реактивных двигателей явились сти* мулом для разработки и применения гистерезисных двигателей Роторы таких двигателей изготовляются из специальных магнитно-твердых сплавов, имеющих широкую петлю гистерезиса (например, сплав викаллой). При массивной конструкции ротора эти двигатели при пуске развивают также асинхронный враРис 41-5. Конструкция роторов синхронных реактивных двигателей щающий момент. Однако этот момент значительно меньше гистерезисного момента (см. § 25-4), вследствие чего пуск, а также втягивание в синхронизм и работа происходят за счет гистерезисного момента вращения. Разница между двигателями с постоянными магнитами и гистерезисными состоит в том, что у первых ротор подвергается специальному предварительному намагничиванию, а у вторых ротор намагничивается полем статора двигателя. Гистерезисные двигатели имеют лучшие показатели, чем реактивные, и строятся на мощности до 300—400 em. Реактивно-гистерезисный синхронный двигатель (рис. 41-6) с редуктором был предложен в 1916 г. Уорреном и широко применяется до настоящего времени для привода электрических часов, для протягивания ленты в самопишущих приборах и т.% Статор этого двигателя имеет экранированные П0люсы(ем. также § 30-2), а ротор состоит из шести-семи пластин толщиной 0,4 мм из закаленной маг- Рис. 41-6. Реактивно-гистерезисный двигатель / — магнитопровод статора; 2 — каркас; 3 — катушка возбуждения; 4 — короткозамкнутые витки; 5 — ротор нитно-твердой стали. Пластины имеют форму колец с перемычками. Магнитное сопротивление ротора в направлении перемычек меньше, и поэтому Ха ф xq. Ротор посажен на валик с помощью прорезей в перемычках пластин и соединен с редуктором. Ротор вместе с редуктором заключен в герметический корпус (на рис. 41-6 не показан). Пуск двигателя происходит за счет асинхронного (вихревого) и гистерезис-нога моментов, а работа — за счет гистерезисного и реактивного моментов, причем последний в 2—3 раза больше гистерезисного. Выпускаемые в СССР реактивно- гистерезисные двигатели на f = 50 гц типов СД-60, СД-2, СДЛ-2, СРД-2 имеют мощность на валу 12 мквт, а двигатели СД-1/300 — 0,07 мквт (цифры в обозначении типов указывают на скорость вращения выходного конца вала в об/мин). Их к. п. д. менее 1%. § 41-4. Тихоходные и шаговые синхронные двигатели Однофазные тихоходные синхронные реактивные двигатели отличаются тем, что полюсное деление их статора кратно числу зубцовых делений ротора (рис. 41-7, а) или зубцовые деления на полюсах статора равны зубцовым делениям ротора (рис. 41-7, б) Поток статора Ф этих двигателей пульсирует с частотой тока f. Если при Ф = 0 полюсы (рис. 41-7, а) или зубцы (рис. 41-7, б) статора смещены относительно зубцов ротора, то при возрастании Ф от нуля зубцы ротора притягиваются к полюсам или зубцам статора и ротор по инерции будет поворачиваться и тогда, когда Ф снова уменьшится до нуля. Если к этому времени зубец ротора приблизится к следующему полюсу или зубцу статора, то в течение следующего полупериода1 изменения Ф силы будут действовать на зубцы ротора в том же направлении. Таким образом, если средняя скорость ротора такова, что в течение одного полупериода тока ротор поворачивается на одно зуб-повое деление, то на него будет действовать пульсирующий вращающий момент одного знака и ротор будет вращаться со средней синхронной скоростью n = 2/1/Za, (41-3) где Z2 — число зубцов ротора. Например, если h = 50 гц Рис. 41-7. Однофазные тихоходные син- и 22 = 77 то п= 1,3 об/сек = хронные реактивные двигатели с явно- = 78 об/мин. При питании обмот-выраженными полюсами на статоре (а) ки через выпрямитель скорость и с зубчатым статором и общей обмоткой уменьшается вдвое. возбуждения (б)для улучшения условий работы двигателя и увеличения равномерности вращения ротор обычно выполняется с повышенной механической инерцией. С этой же целью иногда двигатели выполняются с внутренним статором и внешним ротором (например, двигатели электропроигрывателей). Если на полюсах (рис. 41-7, б) оставить только по одному зубцу, то получится двигатель, называемый колесом Ла-Кура. При включении двигателя в неподвижном состоянии возникает явление при-липания (см. § 25-4), и двигатель необходимо пускать в ход толчком от руки или с помощью встроенного пускового асинхронного двигателя. Синхронные безредукторные двигатели. На рис. 41-8 показано устройство безредукторного двигателя, разработанного американскими инженерами Л. Чеб-бом и Г. Уотсом. Двигатель имеет двухфазную обмотку с 2р = 2 и фазной зоной 90°. На рис. 41-8 катушки обмотки статора намотаны через спинку, но может быть применена и обмотка обычного типа. Питание обмотки производится от однофазной сети, причем одна из фаз питается через конденсаторы, благодаря чему образуется вращающееся поле. Зубчатый ротор лишен обмотки. Разность чисел зубцов ротора и статора Z2 — Zt = 2р на рис. 41-8 равна двум. Под воздействием вращающегося поля ротор стремится занять такое поло- жение, при котором по линии оси магнитного потока зубец ротора встанет против зубца статора (линия А на рис. 41-8). Когда ось потока повернется в положение В, зубец 2' ротора встанет против зубца 2 статора, а при повороте потока от положения А на 180° зубец 9' ротора встанет против зубца 9 статора, т. е. произойдет поворот ротора на одно его зубцовое деление. Поэтому скорость вращения ротора А В Например, при fx = 50 гц, 2р — 2, Z2 = 400 и Zy — 398 будет п= 1/4 об/сек = = 15 об /мин. Рассматриваемый двигатель работает в сущности по принципу взаимодействия зубцовых гармоник поля, вследствие чего и получается малая скорость вращения. Такой принцип называется электрической редукцией (уменьшением) скорости. Поэтому эти двигатели не нуждаются в механических редукторах и называются безредуктор-ными. Существуют также другие разновидности безредукторных двигателей. Эти двигатели применяются в случаях, когда необходимы пониженные скорости вращения Снапример, электрические часы и ряд устройств автоматики), а также при использовании источников с повышенной частотой питания f = 400-г1000 гц. Шаговые двигатели питаются импульсами электрической энергии и под воздействием каждого импульса совершают угловое или линейное перемещение Рис. 41-8. Реактивный безредук-торный синхронный двигатель Рис. 41-9. Принцип устройства и работы реактивного шагового двигателя на некоторою, вполне определенную величину, называемую шагом. Эти двигатели применяются для автоматического управления и регулирования, например а металлорежущих станках с программным управлением для подачи резца и т. д. На рис. 41-9 изображен простейший шаговый двигатель с тремя парами полюсов на статоре. При питании током обмотки полюсов индуктора 1—/ четырех-полюсный ротор занимает положение, показанное на рис. 41-9, о, а при питании полюсов 1—1 и 2—2 займет положение, показанное на рис. 41,9, б, отрабогав шаг 15°. Далее, при отключении обмотки /—/ ротор повернется против часовой стрелки еще на 15° (рис. 419, в) и т. д. Уменьшение шага двигателя достигается увеличением числа полюсов или путем размещения на общем валу нескольких пар статоров и роторов, повернутых относительно друг друга на соответствующий угол. Вместо сосредоточенных обмоток (рис. 41-9) можно применять также распределенные обмотки. Существует целый ряд разновидностей шаговых двигателей вращательного (с шагом до 180°, до 1° и менее) и поступательного движения. Предельная частота следования импульсов, при которой возможен пуск и остановка двигателя без потери шага и которая называется также приемистостью, составляет от 10 до 10000 гц. § 41-5. Индукторные синхронные машины В ряде установок (индукционный нагрев металлов, сварка специальных сплавов, гироскопические и радиолокационные установки- и пр ) применяется одно-или трехфазный ток повышенной частоты (400— 30000 гц) Синхронные генераторы нормальной конструкции, имеющие частоту f = pn, для этого случая не подходят, Рис. 41-10. Устройство одноименнополюсно-го (а) и разноименнополюсного (б) однофазного индукторного генератора / — катушка возбуждения; S — корпус; 3 — пакет статора; 4 — обмотка переменного тока; 5 — пакет ротора> 6 — втулка ротора, 7 — вал Рис 41-11. Кривая поля в зазоре индукторных генераторов» выполненных по схеме рис. 41-10 так как увеличение скорости вращения л у них ограничено условиями механической прочности, а увеличение числа полюсов 2р ограничено минимально возмож* ной величиной полюсного деления по условиям размещения обмоток. Поэтому в этих случаях применяются генераторы особой конструкции, которые называются индукторными и основаны на действии зубцовых пульсаций магнитного потока. Роторы всех видов индукторных генераторов имеют вид зубчатых колее и не имеют обмоток, что повышает надежнбсть их работы, -а обмотки возбужде постоянного тока и якорные обмотки переменного тока располагаются на статора В некоторых случаях вместо обмоток возбуждения применяются постоянные т ниты. В последнее время начинают находить применение также индукторные двигв* тел и, развивающие при питании током повышенной частоты умеренные скорости вращения. Их устройство аналогично устройству индукторных генераторов Генератор, изображенный на рис. 41-10, а, имеет по два пакета статора и ротора и кольцевидную обмотку возбуждения. Он называется одноименно-полюсным, так как магнитная полярность каждого пакета вдоль всей окружности неизменна Генератор, показанный на рис. 41-10, б, является однопакет-ным и называется разноименнополюсным. В больших пазах его статора расположена обмотка возбуждения, а в малых пазах — обмотка переменного тока. Кривая индукции магнитного поля вдоль окружности ротора для генераторов, показанных на рис. 41-10, изображена на рис. 41-11. Можно представить себе, что Рис. 41-12. Принцип устройства (а) и кривая магнитного поля (б) однофазного индукторного генератора с гребенчатой зубцовой зоной пульсирующая волна этого поля движется вместе с ротором, а постоянная составляющая магнитного поля неподвижна-относительно статора и э, д. с. в катушке с любым шагом от этого поля равна нулю. Поэтому эта ча,сть потока не производит полезной работы и вызывает ухудшение использования материалов машины. Зубцам ротора придают такую форму, чтобы кривая рис. 41-11 приближалась к синусоиде. Тогда пульсирующая составляющая поля с амплитудой Шаги катушек этой обмотки должны быть такими, чтобы на рис. 41-10 одна сторона катушки находилась против зубца, а другая — против паза ротора, так как в этом случае э. д. с. переменного тока проводников катушки будут арифметически складываться. Потокосцепления обмоток возбуждения генераторов, показанных на рис. 41-10, при вращении ротора остаются постоянными, и поэтому в этих обмотках переменная э. д. с. не индуктируется, что является положительным фактором. При / 5= 3000 гц целесообразно применять конструкцию статора, предложенную Гюи. В этой конструкции большие зубцы статора, охватываемые обмотками, имеют гребенчатую форму и зубцы соседних полюсов статора сдвинуты относительно зубцов ротора на половину зубцового деления (рис. 41-12). Благодаря этому потоки различных половинок полюсов Ф' и Ф" различны (рис. 41-12, б) и при смещении ротора на половину зубцового деления поток, сцепляющийся с катушкой Рис. 41-13. Принцип устройства трехфазного индукторного генератора с гребенчатой зубцовой зоной обмотки якоря 2, изменяется от значения 4- (Ф' — Ф") до значения — (Ф' — Ф") и в этой обмотке индуктируется э. д. с. частоты /, определяемой равенством (41-5). В то же время потокосцепление с обмоткой возбуждения 1 не изменяется. Применяются и другие разновидности индукторных машин. В трехфазных машинах вместо двух больших зубцов, как на рис. 41-10, на протяжении двойного полюсного деления выполняется шесть больших зубцов и малые зубцы соседних больших зубцов статора сдвинуты относительно зубцов ротора не на половину, а на одну шестую часть малого зубцового деления (рис. 41-14). Благодаря этому потоки соседних больших зубцов статора изменяются со сдвигом по фазане на 180°, а на 60°, что используется для получения в фазах А, В, С обмотки якоря э. д. с, сдвинутых на 120°. Вследствие повышенной частоты обмотка якоря индукторной машины имеет повышенные синхронные сопротивления х^ и xq. Поэтому для улучшения характеристик этой машины последовательно с обмоткой якоря во многих случаях включаются конденсаторы. § 41-6. Некоторые другие разновидности синхронных машин Электромагнитная муфта служит для гибкого соединения двух вращающихся валов, например вала дизеля судовой силовой установки с валом гребного винта. В конструктивном отношении электромагнитная муфта представляет собой явно-полюсную синхронную машину, индуктор которой, возбуждаемый постоянным током, укреплен на одном валу (например, ведущем), а якорь укреплен на другом валу (например, ведомом). Обмотка якоря может быть фазной (в этом случае она соединяется с реостатом) или короткозамкнутой в виде беличьей клетки. Если ведущий и ведомый валы вращаются со скоростями ях и п% (причем пх Ф п2), то в обмотке якоря муфты индуктируется ток частоты и создается электромагнитный момент, под воздействием которого и совершается вращение ведомого вала. При короткозамкнутой обмотке якоря скольжение ведомого вала относительно ведущего составляет 0,01 — 0,03. При фазной обмотке якоря скольжение s и скорость гц можно регулировать путем изменения сопротивления реостата или тока возбуждения. Электромагнитная муфта позволяет осуществлять плавное присоединение и отключение ведомого вала при вращающемся первичном двигателе, а при фазной обмотке также регулирование скорости вращения. Кроме того, муфта защищает рабочий механизм от больших перегрузок, так как при большом тормозном моменте ведомый вал останавливается. Если пуск ведомого вала производится при вращении ведущего вала со скоростью % = па, то частота f велика и для получения достаточного пускового момента короткозамкнутую обмотку якоря нужно выполнить с использованием эффекта вытеснения тока (см. гл. 27). Электромагнитные муфты обычно строятся мощностью до Р н = 500 кет. Бесконтактные синхронные машины с когтеобразными полюсами. В современных промышленных и транспортных установках нередко синхронные машины по условиям надежности необходимо выполнять без скользящих контактов на роторе. В этих случаях можно применять синхронные машины без обмотки возбуждения (реактивные), а при повышенных частотах также индукторные и редуктор-ные машины. Однако можно также использовать машины с когтеобразным ротором и неподвижной обмоткой возбуждения. Такие машины строятся по такому же принципу, как и бесконтактные сельсины (см. рис. 319), но обычно с 2р > 2. При / = 50 гц их целесообразно строить мощностью до Рн = 20 -г- 30 кет. Ударные синхронные генераторы применяются для испытания выключателей высокого напряжения на мощность отключения. Они строятся на базе турбогенераторов мощностью до 50—200 Мет и работают в режиме внезапного короткого замыкания. Для получения возможно большего тока короткого замыкания они изготовляются с пониженными индуктивными сопротивлениями рассеяния и с надежным креплением обмоток, в особенности их лобовых частей. Существуют и разрабатываются также некоторые другие разновидности синхронных машин. Основными частями синхронной машины являются якорь и индуктор (обмотка возбуждения). Якорь (обычно расположенный на статоре) представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора. Индуктор состоит из полюсов — электромагнитов постоянного тока[1] или постоянных магнитов. Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При неявнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин с фазным ротором, с той лишь разницей, что между полюсами оставляется место, не заполненное проводниками (так называемый большой зуб). Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса. Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную конструкцию из электротехнической стали (то есть набранную из отдельных листов). Электротехническая сталь обладает рядом интересных свойств. В том числе она имеет повышенное содержание кремния, чтобы повысить её электрическое сопротивление и уменьшить тем самым вихревые токи Фуко. [править] Принцип действия [править] Двигательный режим Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щетка кольцо), в маломощных — постоянные магниты. Существует обращённая конструкция двигателей, в которой якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники.) Запуск двигателя. Двигатель требует разгона до частоты, близкой к частоте вращения магнитного поля в зазоре, прежде чем сможет работать самостоятельно. При такой скорости вращающееся магнитное поле якоря сцепляется с магнитными полями полюсов индуктора (если индуктор расположен на статоре, то получается, что вращающееся магнитное поле вращающегося якоря (ротора) неподвижно относительно постоянного поля индуктора (статора), если индуктор на роторе, то магнитное поле вращающихся полюсов индуктора (ротора) неподвижно относительно вращающегося магнитного поля якоря (статора)) — это называется «вошёл в синхронизм». Для разгона обычно используется асинхронный режим, при котором обмотки индуктора замыкаются через реостат или накоротко, как в асинхронной машине. После выхода на номинальную скорость индуктор запитывают постоянным током от выпрямителя. В двигателях с постоянными магнитами применяется внешний разгонный двигатель (обычно асинхронный). Существуют комбинированные варианты, в которых на роторе, вместе с постоянными или электромагнитами, установлены короткозамкнутые обмотки. Иногда на валу ставят небольшой генератор постоянного тока, который питает электромагниты. Также используется частотный пуск, когда частоту тока якоря постепенно увеличивают от очень малых до номинальных величин. Возможен и обратный вариант, когда частоту индуктора понижают от номинальной до 0, т.е. до постоянного тока. Частота вращения ротора [об/мин] остаётся неизменной, жёстко связанной с частотой сети [Гц] соотношением: , где — число пар полюсов ротора. Синхронные двигатели при изменении возбуждения меняют импеданс с емкостного на индуктивный, что позволяет применять их в качестве компенсаторов реактивной мощности (повышения коэффициента мощности). Синхронные двигатели применяют при единичных мощностях свыше 300 квт, при меньших мощностях обычно применяется более простой (и надежный) асинхронный двигатель. [править] Генераторный режим Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3...2%), подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочередно с каждой из фаз обмотки статора, индуцируя в них ЭДС. В наиболее распространенном случае применения трехфазной распределенной обмотки якоря в каждой из фаз, смещенных друг относительно друга на 120°, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трехфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей. Частота индуцируемой ЭДС [Гц] связана с частотой вращения ротора соотношением: , [об/мин] где — число пар полюсов ротора. Часто синхронные генераторы используют вместо коллекторных машин для генерации постоянного тока, подключая их обмотки якоря к трехфазным выпрямителям. [править] Разновидности синхронных машин Гидрогенератор — явнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от гидравлической турбины (при низких скоростях вращения). Турбогенератор — неявнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от паровой или газовой турбины при высоких скоростях вращения ротора (6000, 3000, 1500 об/мин.) Синхронный компенсатор — синхронный двигатель, предназначенный для выработки реактивной мощности, работающий без нагрузки на валу (в режиме холостого хода); при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения или в режиме стабилизации напряжения. Асинхронизированная синхронная машина (АСМ) — синхронная машина с питанием обмоток ротора и статора токами разной частоты, за счёт чего создаются несинхронные режимы работы Ударный генератор-синхронный генератор (как правило, трёхфазного тока), предназначенный для кратковременной работы в режиме короткого замыкания (КЗ). 4-1. Общие сведения Часть 2 Дизель-генераторы представляют собой в большинстве случаев машины с горизонтальным валом. Вверх 4-1. Часть 1 Синхронные машины небольшой мощности иногда выполняются с Часть 2 неподвижными электромагнитами, помещенными на статоре, и обмоткой Часть 3 переменного тока, заложенной в пазы ротора, изготовленного из листовой электротехнической стали; в этом случае обмотка переменного тока4-2. 4-3. соединяется с внешней цепью через контактные кольца и щетки (рис. 4-5). 4-4. 4-5. 4-6. 4-7. 4-8. 4-9. 4-10. 4-11. 4-12. 4-13. 4-14. 4-15. Глава 5 Рис. 4-5. Синхронная машина с неподвижными электромагнитами. Ту часть синхронной машины, в обмотке которой наводится э.д.с., принято называть якорем. Электромагниты (полюсы) вместе с замыкающим их ярмом образуют полюсную систему; ее иногда называют индуктором. В синхронных машинах обычной конструкции статор служит якорем, ротор — полюсной системой. Основные преимущества конструкции с вращающимися полюсами заключаются в том, что здесь возможно осуществить более надежную изоляцию обмотки неподвижного якоря, более просто, без скользящих контактов соединить ее с сетью переменного тока. Указанные преимущества особенно существенны для синхронных машин на большие мощности и высокие напряжения. Устройство скользящих контактов для подвода постоянного тока в обмотке электромагнитов, называемой обмоткой возбуждения, не представляет затруднений, так как мощность, подводимая к этой обмотке, составляет небольшую долю [(0,3 2)%] номинальной мощности машины. Кроме того, нужно отметить, что в современных мощных турбогенераторах, работающих с частотой вращения 3000 об/мин, окружная частота ротора достигает 180 185 м/сек; при такой частоте не представлялось бы возможным выполнить вращающийся якорь, собранный из тонких листов, механически достаточно прочным. Ротор современного турбогенератора выполняется из цельной стальной поковки (рис. 4-6), причем берется сталь весьма высокого качества. Рис. 4-6. Общий вид неявнополюсного ротора турбогенератора. По бокам ротора расположены вентиляторы. Катушки обмотки возбуждения закладываются в пазы, выфрезерованные на внешней поверхности ротора, и закрепляются в пазах прочными металлическими клиньями. Лобовые части обмотки возбуждения закрываются кольцевыми бандажами, выполненными из особо прочной стали. Ток для питания обмотки возбуждения синхронная машина получает обычно от небольшого генератора постоянного тока, помешенного на общем валу с ней или механически с ней соединенного. Такой генератор называется возбудителем. В случае мощного турбогенератора вал возбудителя с валом турбо генератора соединяется при помощи полуэластичной муфты. Схема соединений возбудителя с обмоткой возбуждения синхронной машины показана на рис. 4-7. Рис. 4-7. Схема возбуждения синхронной машины. В качестве возбудителя в большинстве случаев служит генератор постоянного тока с параллельным возбуждением (см. § 5-9,в). В последние годы для получения постоянного тока, необходимого для возбуждения синхронной машины, используются также различные выпрямители — ртутные, полупроводниковые и механические. 4-1. Общие сведения Продолжение Глава 4. Синхронные машины Часть 3 Частота тока, наведенного в обмотке якоря, определяется частотой pn f 60 Гц. Таким вращения п, об/мин, и числом пар полюсов р ротора: образом, для получения стандартной частоты f = 50 Гц нужно, например, при 2р = 2 иметь частоту вращения п = 3000 об/мин (с такой частотой работают почти все современные турбогенераторы), при 2р = 72 п = = 83,3 об/мин (с такой частотой работают днепровские гидрогенераторы). Синхронные двигатели, как правило, выполняются в виде явнополюсных машин обычно на мощности от 100 кВт и выше и на самые различные частоты вращения. Они обладают рядом преимуществ по сравнению с асинхронными двигателями, особенно при большой мощности и низкой частоте вращения, так как могут работать с соs φ = 1 или с опережающим током, улучшая в последнем случае соs φ = 1 всей электроустановки. Наряду с синхронными генераторами и двигателями применяются также синхронные компенсаторы. Они представляют собой синхронные двигатели, работающие вхолостую (без нагрузки на валу) и позволяющие в широких пределах изменять потребляемый ими реактивный ток. Последнее достигается, как будет показано, путем изменения тока возбуждения синхронных компенсаторов, которые в большинстве случаев работают, потребляя опережающий реактивный ток, т. е. как конденсаторы. Они служат для компенсации сдвига фаз тока и напряжения (для улучшения соsφ) или для регулирования напряжения, например в конце линии электропередачи. Режим работы синхронной машины, для которого она предназначена, характеризуется указанными на ее щитке номинальными величинами. На щитке синхронной машины указываются: 1) для какого режима работы машина предназначается (генератор, двигатель или компенсатор); 2) мощность (для генератора — кажущаяся мощность в В·А или кВ·А, а также — активная мощность в Вт или кВт; для двигателя — мощность на валу в Вт или кВт; для компенсатора— реактивная мощность при опережающем токе в В·А или кВ·А); 3) линейный ток в А; 4) линейное напряжение в В или кВ; 5) соsφ; 6) число фаз; 7) соединение обмотки статора (звезда или треугольник); 8) частота тока в Гц; 9) частота вращения ротора в об/мин; 10) напряжение возбуждения; 11) наибольший допустимый ток возбуждения в А (за номинальный ток возбуждения принимается ток, соответствующий номинальному режиму работы). Следует отметить, что если для трансформатора допустимая нагрузка вполне определяется кажущейся мощностью в кВ·А, то для синхронного генератора отдаваемая им мощность в киловольт-амперах не вполне определяет его допустимую нагрузку. Необходимо указать также допустимый соsφ нагрузки генератора при отстающем токе. Последнее объясняется тем, что при работе генератора с отстающим током размагничивающее действие этого тока на основное поле будет тем больше, чем ниже соsφ, а потому, чем ниже соsφ, тем больший ток возбуждения требуется для поддержания на зажимах генератора номинального напряжения. Мы вначале будем рассматривать работу синхронной машины в режиме генератора. При этом будем иметь в виду, что синхронная машина (как любая другая электрическая машина) обратима и что основные электромагнитные процессы в ней одинаковы независимо от того, работает ли она в режиме генератора или двигателя. Различие между тем и другим режимами заключается в том, что в генераторе сдвиг между э.д.с. обмотки якоря и ее током меньше 90°, а в двигателе тот же сдвиг больше 90°. Вследствие этого электромагнитный момент, действующий на ротор, в генераторе направлен против вращения, а в двигателе в сторону вращения. -2. Холостой ход Часть 1 Под холостым ходом генератора понимается такой режим его работы, при котором ток в обмотке якоря (статора) равен нулю. Следовательно, магнитное поле в синхронном генераторе при холостом ходе создается только н.с. обмотки возбуждения. Мы можем принять, что оно состоит из двух полей: основного поля, магнитные линии которого проходят через воздушный зазор и сцепляются с обмоткой статора, и поля рассеяния полюсов, магнитные линии которого сцепляются только с обмоткой возбуждения. Основному полю соответствует поток в воздушном зазоре Ф, который при вращении полюсов будет наводить в обмотке якоря э.д.с. Важно, особенно для машин большой мощности, чтобы кривая этой э.д.с. была возможно ближе к синусоиде. По ГОСТ 183-55 проверка синусоидальности кривой делается для линейного напряжения при холостом ходе и при рабочем соединении обмотки якоря. Критерием для оценки кривой напряжения служит коэффициент искажения синусоидальности кривой, под которым понимается выраженное в процентах отношение корня квадратного из суммы квадратов амплитуд трех наибольших. гармонических составляющих данной периодической кривой к амплитуде ее основной гармонической. При номинальном напряжении он не должен превышать 5% для генераторов мощностью свыше 1000 кВ·А и 10% для генераторов мощностью от 10 до 1000 кВ·А. В отдельных специальных случаях требования в отношении приближения кривой напряжения к синусоидальной могут быть еще более повышены согласно особым условиям, установленным между заказчиком и поставщиком машины. Для получения кривой э.д.с., близкой к синусоиде, прежде всего необходимо, чтобы кривая поля машины была по возможности синусоидальной. В явнополюсной машине, как указывалось, этого добиваются, придавая надлежащую форму очертанию полюсного наконечника (той части полюса, которая обращена к якорю). В неявнополюсных машинах на роторе выбирается такое соотношение между частью его окружности, не имеющей пазов, и частью окружности с пазами, чтобы в кривой поля снизились амплитуды наиболее резко выраженных высших гармоник. Кроме того, обмотка якоря выполняется с укороченным шагом, что в значительной степени способствует улучшению формы кривой наведенной э.д.с. (см. § 3-3,е). В неявнополюсных машинах (турбогенераторы) тому же самому способствует выбор большого числа пазов на полюс и фазу (q = 6 12). В тихоходных явнополюсных машинах (например, гидрогенераторы с вертикальным валом) при большом числе полюсов полюсное деление τ получается недостаточным для размещения на нем большого числа пазов, а потому приходится для таких машин часто брать q < 3. В этом случае при открытых пазах на якоре и при q, равном целому числу, в кривой э.д.с. фазы могут иметь место так называемые зубцовые гармоники с относительно большими амплитудами. Они в основном возни кают из-за поперечных колебаний поля в воздушном зазоре, обусловленных зубчатостью якоря. Такие колебания поля вправо и влево относительно оси полюсов (рис. 4-8) Zn fz 60 , так как при перемещении ротора на одно происходят с частотой пазовое деление якоря tс получается полный период колебания. Рис. 4-8. Картина поперечных колебаний поля в воздушном зазоре. Соответственно этим колебаниям поля будет изменяться потокосцепление фазы, и, следовательно, в ней будет наводиться э.д.с той же частоты fг (кроме э.д.с. от первой и высших гармоник основного поля). Поэтому кривая э.д.с. получает вид, представленный на рис. 4-9. Рис. 4-9. Осциллограмма э.д.с. синхронной машины при наличии зубцовых гармоник Зубцовые гармоники в кривой э.д.с. больших машин, особенно в тех случаях, когда они работают на длинные линии электропередачи, должны быть сведены по возможности до ничтожных значений. Они нежелательны4-1. потому, что могут вызвать перенапряжения резонансного характера и создать мешающие шумы в линиях связи, расположенных вблизи и вдоль линий4-2. Часть 1 электропередачи. Часть 2 Амплитуды зубцовых гармоник не изменяются при укорочении шага,4-3. так как укорочение шага мы можем сделать только на целое число пазовых4-4. делений Поэтому приходится применять другие способы их уменьшения4-5. Вверх Достаточно эффективным способом, главным образом и применяемым в 4-6. настоящее время для мощных явнополюсных машин, является выполнение4-7. 4-8. обмотки с дробным числом пазов на полюс и фазу. В этом случае4-9. катушечные группы, составляющие фазу обмотки, состоят из различных 4-10. чисел катушек; поэтому зубцовые гармоники э.д.с., наведенные в них,4-11. оказываются сдвинутыми по фазе на большой угол, близкий к 180o, что и4-12. 4-13. приводит к уменьшению их амплитуды. Практически мы можем считать, что изменение во времени потокосцеплений обмотки статора получается близким к синусоидальному. Поэтому мы можем поток Ф и наведенную им э.д.с., так же как для трансформатора, изобразить временными векторами. 4-14. 4-15. При наличии на статоре трехфазной обмотки в ее фазах будут наводиться э.д.с., сдвинутые по фазе на 120°. Значение фазной э.д.с. может быть рассчитано по такой же формуле, как и для асинхронной машины (см. § 3-3): E 4,44 fwk0 . (4-1) Большое значение при исследовании синхронной машины имеет характеристика холостого хода. Она представляет собой зависимость э.д.с. E0, наведенной в обмотке якоря при холостом ходе, от тока Iв (или от н.с. Fв) обмотки возбуждения при постоянной номинальной частоте вращения, n = const (рис. 4-10). Рис. 4-10. Характеристика холостого хода, E0 = f(Iв) при п = const. Так как при п = const (следовательно, f = const) э.д.с. Е0 согласно (4-1) пропорциональна Ф, то та же кривая в другом масштабе представляет собой магнитную характеристику, Ф = f(Fв). Характеристика холостого хода может быть получена путем расчета магнитной цепи машины для различных значений потока Ф и, следовательно, э.д.с. E0. Магнитная цепь машины состоит из пяти участков: воздушного зазора, зубцового слоя статора, его ярма, полюсов (зубцового слоя ротора для неявнополюсных машин) и ярма ротора (рис. 4-11). Глава 5 Рис. 4-11. Магнитная цепь явнополюсной синхронной машины. Зная сечения этих участков, определяем индукции B в них. Затем по кривым намагничивания для данных сортов стали находим соответствующие напряженности поля H. Умножив Н на длины участков, получим магнитные напряжения, сумма которых определяет н.с. обмотки возбуждения. Наибольшее магнитное напряжение здесь приходится на воздушный зазор: оно составляет 86 92% от н.с. обмотки возбуждения при E0 = Uн. Характеристика холостого хода может быть также получена опытным путем. Для этого нужно при номинальной частоте вращения синхронной машины, приводимой во вращение каким-нибудь первичным двигателем, изменять ток возбуждения Iв от нуля до некоторого максимума и затем от данного максимума опять до нуля. Измеренная при этом зависимость э.д.с. E0 от тока возбуждения Iв изобразится двумя ветвями характеристики: восходящей и нисходящей. Вторая пойдет несколько выше первой. Однако расхождение между ними, обусловленное гистерезисом в полюсах и ярме ротора, невелико; можно за истинную характеристику холостого хода считать кривую, проведенную посередине между ее ветвями. Синхронные машины часто включаются на параллельную работу. При такой работе не должны возникать уравнительные токи между машинами изза различия форм кривых их э.д.с. e = f(t). Это условие наряду с другими вызвало необходимость стандартизовать кривую e = f(t) и выбрать в качестве стандартной синусоиду. При синусоидальных э.д.с. токи также будут практически синусоидальными. В этом случае значительно улучшаются условия работы машин, аппаратов, сетей, так как уменьшаются потери, вызванные магнитными полями токов, становится меньше опасность возникновения перенапряжений резонансного характера, ослабляется вредное воздействие линий электропередачи на линии связи. Дальше 4-3.1. Реакция якоря Часть 1 Токи в обмотке якоря создают н.с., которая будет вращаться относительно якоря в ту же сторону и с такой же частотой, что и н.с. обмотки 4-1. 60 f 4-2. nя p возбуждения. Действительно, частота вращения н.с. якоря , а частота тока якоря f pnп 60 , где пп — частота вращения 4-3. 4-3.1. Часть 1 Часть2 Вверх полюсов; отсюда, подставляя в первое равенство значение f из второго равенства, найдем, что nя = пп; направление вращения н.с. якоря зависит от порядка чередования фаз его обмотки (например А — В — C), а этот порядок чередования определяется направлением вращения полюсов. 4-3.2. 4-3.3. 4-3.4. 4-3.5. 4-3.6. 4-3.7. 4-3.8. 4-3.9. Таким образом, н.с. якоря и н.с. обмотки возбуждения неподвижны одна относительно другой. Поле машины при нагрузке будет создаваться совместным действием обеих н.с. Оно будет отличаться от поля при холостом 4-4. ходе. 4-5. 4-6. 4-7. 4-8. Вначале будем рассматривать реакцию якоря, имея в виду4-9. 4-10. качественную сторону этого явления. Количественный учет реакции якоря,4-11. так же как и внутренних падений напряжения в обмотке якоря, производится4-12. при помощи векторных диаграмм, которые будут рассмотрены в дальнейшем. 4-13. 4-14. Синхронный генератор может работать с отстающим или4-15. Воздействие н.с. якоря на поле машины называется реакцией якоря. E опережающим током по отношению к э.д.с. 0 , наведенной потоком полюсов 0 E , или с током, совпадающим по фазе с э.д.с. 0 . Рассмотрим реакцию якоря при токе, совпадающем по фазе с э.д.с. На E рис. 4-12,а изображены векторы тока I , э.д.с. 0 и потока полюсов 0 . 1 Рис. 4-12. Реакция якоря. Глава 5 π π а — при ψ = 0; б — при ψ = 2 ; в — при ψ = - 2 . E Угол между I и 0 , который будем обозначать через ψ, равен нулю. E Здесь под э.д.с. 0 понимается та э.д.с., которая наводится в обмотке якоря потоком полюсов 0 (потоком воздушного зазора) при холостом ходе. На рис. 4-12,а2 показаны полюсы машины и ее статор с одной фазой, причем фаза здесь заменена одной катушкой. Приданном положении фазы относительно полюсов наведенная в ней э.д.с. будет максимальной, так как поток полюсов, пронизывающий катушку в рассматриваемый момент времени, проходит через нулевое значение. Ток в фазе при = 0 будет также максимальным. Ранее из рассмотрения созданной трехфазной обмоткой вращающейся н.с. было установлено, что ее ось (ее амплитуда) совпадает с осью той фазы, ток которой имеет максимальное значение (см § 3-4,б). Следовательно, ось н.с. совпадает с осью катушки, показанной на рис. 412,а2. На этом рисунке показаны индукционные линии поля, созданного обмоткой якоря. Их направление найдено по правилу буравчика в соответствии с направлением наведенного тока, которое определено по правилу правой руки. На рис. 4-12,а2 видно, что поле якоря по отношению к оси полюсов является поперечным. Намагничивающая сила якоря будет ослаблять поле на набегающей половине полюса и усиливать его на сбегающей половине полюса. Продолжение E Рассмотрим реакцию якоря при токе I , отстающем на 90° от э.д.с. 0 (рис. 4- 12,б1). Рис. 4-12. Реакция якоря. π π а — при ψ = 0; б — при ψ = 2 ; в — при ψ = - 2 . На рис. 4-12, б2 показано положение катушки (фазы) относительно полюсов для момента времени, когда ток катушки имеет максимальное значение. Ток катушки достигает максимального значения на четверть периода позднее, чем э.д.с., т. е. после того как полюсы сдвинутся вправо на половину полюсного деления относительно того положения, при котором э.д.с. имеет максимальное значение. В рассматриваемом случае, как видно из рис. 4-12, б2, ось катушки совпадает с осью полюсов; следовательно, здесь н.с. и поле якоря будут продольными (действующими по оси полюсов). Намагничивающая сила якоря будет ослаблять поле, т. е. действовать размагничивающим образом. E Рассмотрим реакцию якоря при токе I , опережающем э.д.с. 0 на 90° (рис. 412,в1). Здесь ток будет иметь максимальное значение на четверть периода ранее, чем э.д.с., т е. в катушке он будет максимальным тогда, как полюсы расположатся относительно катушки так, как показано на рис. 4-12,в2. Направление тока будет, очевидно, такое же, как и направление э.д.с., спустя четверть периода. На рис. 4-12,в2 видно, что н.с. якоря в этом случае будет также продольной (действующей по оси полюсов). Но она будет усиливать поле машины, т. е. будет действовать намагничивающим образом. В общем случае, когда угол сдвига тока относительно э.д.с. больше нуля, но меньше по абсолютному значению 90°, ток можно разложить на две составляющие Isin и Icos (рис. 4-13,a1 и б1) и рассматривать отдельно действие н.с., создаваемых каждой из этих составляющих (Fd и Fq на рис. 4-13,а2 и б2, где Fa — н.с. якоря; ее ось совпадает с осью фазы, имеющей максимальный ток Iм). Рис. 4-13. Реакция якоря при 90°. а1, а2 — при отстающем токе (>0), б1, б2 — при опережающем токе (<0) (Fd — продольная н.с. якоря; Fq —поперечная н.с. якоря). Таким образом, приходим к следующим выводам: в генераторе при отстающем токе реакция якоря будет размагничивающей, а при опережающем токе — намагничивающей. Рассмотрев реакцию якоря с качественной стороны, вначале выясним, какие поля будут иметь место в машине при ее нагрузке и что собой представляют внутренние падения напряжения в обмотке якоря. После этого перейдем к рассмотрению векторных диаграмм. При холостом ходе поле в машине создается, как уже отмечалось, только обмоткой возбуждения. Большая часть индукционных линий этого поля проходит по главной магнитной цепи машины (воздушный зазор, зубцовый слой и ярмо статора, полюсы и ярмо ротора). Эту часть поля можно по аналогии с трансформатором назвать основным полем или полем взаимной, индукции. Ему соответствует поток в воздушном зазоре или поток полюсов Ф0. Поток полюсов и наведенную им э.д.с. мы изобразили временными векторами Ф0 и Е0 (рис. 4-12, а1, б1, в1). Аналогию между трансформатором и синхронной машиной можно распространить и на работу машины с нагрузкой, так как в этом случае поле будет создаваться совместным действием н.с. обмоток возбуждения и якоря. Обе эти н.с. и создаваемое ими поле, неизменные во времени, но вращающиеся в пространстве, будут эквивалентны соответствующим н.с. и полю, переменным во времени, но неподвижным относительно обмотки якоря. Поэтому можно считать, что пространственный сдвиг между осями н.с., равный углу 90° + ψ (рис. 4-13), соответствует такому же сдвигу по фазе (во времени) этих н.с. Синхронная машина, работающая с постоянным током возбуждения, аналогична трансформатору последовательного включения (трансформатору тока), работающему с постоянным первичным током. ) Индуктивное сопротивление рассеяния обмотки якоря. Понятие индуктивного сопротивления рассеяния как некоторого4-1. Вверх параметра обмотки якоря синхронной машины аналогично тому же самому4-2. понятию в применении к обмотке статора асинхронной машины. 4-3. 4-3.1. Поле рассеяния якоря можно представить себе сцепленным только с 4-3.2. обмоткой якоря и не зависящим от других полей машины. Магнитные линии 4-3.3. этого поля проходят между стенками пазов, между коронками зубцов статора 4-3.4. и вокруг лобовых частей его обмотки. Можно считать, что потокосцепление 4-3.5. рассеяния определяется только магнитной проводимостью тех воздушных 4-3.6. 4-3.7. промежутков, по которым проходят магнитные линии поля рассеяния. 4-3.8. Поэтому можно принять, что между током якоря I и потокосцеплением 4-3.9. рассеяния, а следовательно, и наведенной им э.д.с. Еσ существует пропорциональная зависимость: 4-4. E σ jIxσ , (4-2) где Еσ — э.д.с. рассеяния; хσ — индуктивное сопротивление рассеяния якоря, значение которого считать постоянным. б) Активное сопротивление обмотки якоря. 4-5. 4-6. 4-7. 4-8. 4-9. 4-10. 4-11. можно 4-12. 4-13. 4-14. 4-15. Активное сопротивление обмотки якоря rа больше ее сопротивления r постоянному току, что обусловлено вихревыми токами, которые наводятся полем рассеяния обмотки якоря. Увеличение rа по сравнению с r обычно составляет небольшую величину для современных больших машин, где главным образом и приходится с ним считаться. Для таких машин, например турбогенераторов, принимается ряд мер для уменьшения потерь, вызванных полем рассеяния. Наиболее эффективной мерой нужно считать выполнение обмотки статора из транспонированных стержней, т. е. из стержней, состоящих из некоторого числа элементарных проводников, особым образом скрученных друг с другом, вследствие чего э.д.с., наведенные в них пазовым полем рассеяния, практически равны между собой. Так как эти элементарные проводники изолированы друг относительно друга, то внутри стержней не возникает вихревых токов и ток распределяется практически равномерно по всем элементарным проводникам. Активное сопротивление обмотки якоря невелико, и обусловленное им активное падение напряжения составляет, например, для больших машин меньше 0,5% от номинального напряжения. Дальше Глава 5