Автореферат - Ростовский государственный университет путей
реклама

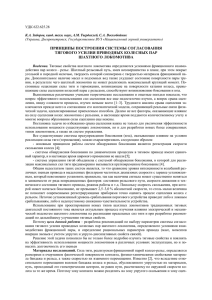
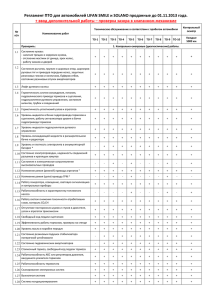
На правах рукописи Коропец Петр Алексеевич ПРОГНОЗИРОВАНИЕ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЛОКОМОТИВА ПО ХАРАКТЕРИСТИКАМ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В СИСТЕМЕ "ЭКИПАЖ – ТЯГОВЫЙ ПРИВОД – ПУТЬ" Специальность 05.22.07 - Подвижной состав железных дорог, тяга поездов и электрификация АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук Ростов-на-Дону 2007 2 Работа выполнена в государственном образовательном учреждении высшего профессионального образования «Ростовский государственный университет путей сообщения» (РГУПС) Научный руководитель – доктор технических наук, профессор Волков Игорь Васильевич Официальные оппоненты – доктор технических наук Коссов Валерий Семенович кандидат технических наук, доцент Олешко Сергей Борисович Ведущая организация – Всероссийский научноисследовательский и проектноконструкторский институт электровозостроения (ОАО «ВЭлНИИ») Защита диссертации состоится ____ ___________ 2007 г. в _____ часов на заседании диссертационного совета Д 218.010.01 при Ростовском государственном университете путей сообщения по адресу: 344038, Ростов-на-Дону, пл. им. Ростовского Стрелкового Полка Народного Ополчения, 2, конференцзал. С диссертацией можно ознакомиться в библиотеке университета Автореферат разослан ____ ___________ 2007 г. Ученый секретарь диссертационного совета Д 218.010.01 доктор технических наук, профессор Соломин В.А. 3 Общая характеристика работы Актуальность темы. Стратегия развития железнодорожного транспорта России ставит своей целью обеспечить потребности экономики в перевозках с одновременным доведением их качества до мирового уровня. Для решения поставленных задач нужен тяговый подвижной состав нового поколения, созданный с использованием современных и перспективных технологий и систем управления. Тяговые качества локомотивов зависят от конструкции его механической части, системы управления мощностью, а также от дополнительных устройств, обеспечивающих устойчивую реализацию силы тяги как при трогании с места, так и в движении. Максимальная сила тяги, развиваемая локомотивом, ограничивается пределом по сцеплению колес с рельсами и опасностью развития боксования. Процесс боксования известен со времен паровой тяги. Также хорошо известны негативные стороны этого явления: снижение эффективной тяги, высокие (часто – предельные) динамические нагрузки в тяговом приводе, в несколько раз возрастающий износ колес и рельсов. Поэтому предотвращение боксования остается актуальной задачей, решение которой позволит получить экономию электроэнергии (топлива) и снизить затраты на ремонт подвижного состава и пути. Учитывая, какие средства расходуют ведущие мировые лидеры локомотивостроения на разработку противобуксовочных систем, а также сложность и стоимость этих систем, следует признать, что проблема борьбы с боксованием остается актуальной. Характерной особенностью всех известных противобоксовочных систем является то, что они обнаруживают уже начавшееся боксование, когда уже превышен предел по сцеплению и скорость скольжения колесной пары достигла определенной величины. Эффективность борьбы с боксованием зависит от того, как быстро оно обнаружено и приняты меры по его устранению. Наиболее эффективным во всех отношениях является недопущение боксования при реализации максимальных по условиям сцепления тяговых сил. Но для этого необходимо постоянно знать тот предел тяги, превышение которого неизбежно приведет к боксованию. Прогнозирование боксования позволяет своевременно принять меры по его предотвращению (изменение тягового режима, упреждающая подача песка или модификатора сцепления) и тем самым исключить боксование при реализации максимальной силы тяги. Предмет исследования. При движении локомотива максимальные силы сцепления могут изменяться в широких пределах и зависят от многих факторов (состояния поверхностей колеса и рельса, температуры и влажности окружающей среды, величины нормальных и касательных нагрузок и пр.), которые невозможно точно измерить или учесть заранее. Задача определения сил сцепления дополнительно усложняется тем, что нормальные и касательные динамиче- 4 ские нагрузки в контакте колес с рельсами, обусловленные колебаниями экипажа и привода, имеют главным образом случайный характер. В то же время, характеристики колебаний привода и экипажа зависят от свойств и состояния фрикционной системы "колесо-рельс" и изменяются с увеличением среднего тягового (или тормозного) момента, приложенного к колесной паре. Следовательно, экспресс-анализ динамических процессов в системе "экипаж-привод-путь" позволяет определить параметры фрикционного контакта колеса с рельсом, соответствующие текущему режиму. Таким образом, предметом исследования являются динамические процессы в системе "экипаж – тяговый привод – путь" в режимах перехода от тяги к боксованию. Цель и задачи исследования. Целью данной работы является разработка методов и средств контроля и прогнозирования состояния фрикционного контакта колес локомотива с рельсами для предотвращения боксования в режимах реализации максимальной тяги. Для достижения поставленной цели в работе решаются следующие задачи: - исследовать специфику и важнейшие закономерности динамических процессов в тяговых приводах локомотивов в режимах устойчивой тяги, а также – в режимах реализации предельных сил сцепления колес с рельсами; - на основе выявленных закономерностей динамических процессов в тяговых приводах разработать критерий оценки устойчивости максимального по условиям сцепления тягового момента, реализуемого колесной парой; - сформировать информативные признаки переходного процесса от режима тяги к режиму боксования; - разработать устройство обнаружения предельных сил сцепления для предупреждения боксования колесных пар локомотива; - провести экспериментальную проверку полученных теоретических результатов и принципов, заложенных в разработанном устройстве. Методика исследования. Основу работы составляют методы математического моделирования линейных и нелинейных динамических систем с последующей экспериментальной проверкой результатов. Научная новизна работы заключается в следующем: - разработаны математические модели, методика и алгоритм исследования динамических процессов в тяговых приводах локомотивов в режимах перехода от устойчивой тяги к боксованию; - определен и обоснован критерий оценки устойчивости максимального тягового момента, реализуемого колесной парой в условиях возмущенного движения; - установлены закономерности режима перехода от тяги к боксованию, в частности: возрастание амплитуд динамических составляющих обобщенных координат системы, изменение структуры и собственных частот системы, проявление асимметрии в колебательных процессах; 5 - сформированы информативные признаки переходного (от тяги к боксованию) процесса, которые позволяют по пространственным ускорениям буксы идентифицировать динамический режим и состояние фрикционного контакта колеса с рельсом; - на основе выявленных закономерностей разработано устройство обнаружения предельных сил сцепления в контакте колес с рельсами, алгоритм работы которого обеспечивает автоматическую адаптацию к изменяющимся характеристикам фрикционного контакта (патент РФ № 2175612); - создан и испытан автоматический испытательный комплекс (АИК), регистрирующий пространственные колебания букс локомотива в интересующих режимах без участия оператора. Достоверность полученных результатов и выводов. Достоверность разработанных моделей, алгоритмов и принципов подтверждена строгостью теоретического обоснования и результатами натурных (поездных) испытаний. Практическая ценность работы. Разработанные модели, установленные закономерности и сформированные информативные признаки перехода от тяги к боксованию позволяют создать электронное устройство, способное прогнозировать боксование до его развития, а также – осуществить оптимальное управление мощностью, исключающее боксование при реализации максимальной (по условиям сцепления) силы тяги. Результаты выполненных исследований в полной мере могут быть использованы при разработке противоюзовых устройств и создании эффективных систем управления тормозами. Апробация работы. Основные положения диссертационной работы представлялись, обсуждались и были одобрены на: - 5-й всесоюзной научно-технической конференции "Состояние и перспективы развития электровозостроения в стране", Новочеркасск, 1981г.); - всесоюзной научно-технической конференции "Создание и техническое обслуживание локомотивов большой мощности", (Ворошиловград, 1985г.); - II Международный трибологический симпозиум INSICONT ,(Краков, 1986г.); - 6-й всесоюзной научно-технической конференции "Состояние и перспективы развития электровозостроения в стране", (Тбилиси, 1987г.); - 59-й вузовской научно-технической конференции, (Ростов-на-Дону, 2000г.). - заседании кафедры "Электроподвижной состав" РГУПС, (Ростов-на-Дону, 2007г.); - совместном заседании кафедр "Электроподвижной состав" и "Локомотивы и локомотивное хозяйство" РГУПС, (Ростов-на-Дону, 2007г.). Публикации. По материалам диссертации опубликовано 18 печатных работ, включая патент РФ. Структура и объем диссертации. Диссертация состоит из введения, четырех глав, заключения и приложений. Работа содержит 136 страниц основного текста, 8 таблиц, 36 рисунков, список использованных источников из 149 наименований и приложения на 27 страницах. 6 Содержание работы Во введении обоснована актуальность темы, поставлены цель и задачи работы, определены направления исследования. Первая глава "Состояние проблемы и задачи исследования" содержит обзор исследований в области сцепления колеса с рельсом, анализ систем и методов обнаружения боксования и обзор работ по динамике тягового привода локомотива. В ней обоснованы цель, задачи и методы исследования. Изучение взаимодействия колес с рельсами началось одновременно с появлением железных дорог. На протяжении многих десятилетий этой проблемой занимались видные зарубежные и отечественные ученые: Беляев А.И., Бирюков И.В., Вербек Г., Голубенко А.Л., Исаев И.П., Коган А.Я., Коняев А.Н., Лисицын А.Л., Лужнов Ю.М., Марков Д.П., Меншутин Н.Н., Минов Д.К., Самме Г.В., Шаповалов В.В., Barwell F.T., Hirotsu T., Johnson K.L., Kalker J. Попытки выяснить механизм образования тяги, а также уточнить количественные соотношения фрикционных характеристик контакта колеса с рельсом продолжаются и в настоящее время. В то же время совершенно недостаточно изучено влияние динамики тяговых приводов и экипажей локомотивов на реализацию сцепления. Опыты по определению коэффициента сцепления под действием разного рода факторов даже на однородном участке пути дают значительный разброс его реализованной величины. Результат взаимодействия колес с рельсами в режиме тяги зависит от конструкции ходовой части локомотива, тягового привода и системы управления мощностью. Усилиями специалистов решены многие важные вопросы теории сцепления, однако нет точного количественного описания зависимости коэффициента сцепления от скорости движения локомотива и скорости скольжения колес, что связано с нестабильностью самой характеристики сцепления. Поэтому при решении задач динамики привода необходимо разрабатывать такие методики и критерии, которые бы однозначно определяли результат взаимодействия колеса с рельсом и оставались справедливыми при любом виде и параметрах характеристики сцепления. Обзор противобоксовочных систем показал, что подавляющее большинство российских и зарубежных локомотивов оснащены системами обнаружения боксования по факту появления избыточного скольжения колесных пар. Основным (помимо прочих) недостатком таких систем является их неспособность анализировать состояние фрикционного контакта и прогнозировать боксование. Динамические процессы, протекающие в приводе в режиме тяги и в режиме боксования, имеют ряд существенных отличий, которые обусловлены именно свойствами и состоянием фрикционного контакта колес с рельсами. Попытки создания систем, способных обнаруживать боксование по динамическим процессам в тяговом приводе, имеют единичный характер, и в настоящее время их следует считать пока безуспешными. Разработка такой системы возможна на основе глубокого исследования динамики тягового привода локомотива в различных эксплуатационных режимах. В области динамики экипажа и тягового привода локомотива большие 7 исследования проведены Бирюковым И.В., Беляевым А.И., Добрыниным Л.К., Ивановым В.Н., Камаевым А.А., Камаевым В.А., Каменевым Н.Н., Карминским Д.Э., Коссовым В.С., Куценко С.М., Меделем В.Б., Павленко А.П., Пахомовым М.П., Перевозчиковым С.Н., Рыбниковым Е.К., Савоськиным А.Н., Суздальцевым М.Я., Тибиловым Т.А., Щепетильниковым В.А. и др. Но, несмотря на огромный объем выполненных теоретических и экспериментальных работ, режимы реализации максимальной тяги изучены не достаточно, а основные трудности при исследовании динамики привода заключаются в отсутствии достоверной информации о параметрах подсистемы "колесо-рельс" и возмущающих воздействиях. Во второй главе "Квазистационарные режимы работы тягового привода" рассмотрены закономерности создания силы тяги при возмущенном движении. На примере опорно-осевого привода (рис.1а) в соответствии с разработанной методикой показаны особенности динамических процессов, связанные с режимом работы привода (тяга, выбег, реверс) и направлением движения колесно-моторного блока. Основные положения методики исследования режимов тяги (линеаризация системы дифференциальных уравнений, частотные методы анализа) приняты за основу при анализе динамических процессов в тяговом приводе и в переходном режиме от тяги к боксованию. Классификация динамических режимов работы тягового привода локомотива основана на положении равновесной точки а, отражающей равенство тягового момента M т и момента сцепления M c на характеристике сцепления колеса с рельсом (рис.1б). сд zк V b1 bд Мс с М* сx bx xк bп М 1 сп а М я , к , д Мт 0 а) ск кр б) Рис. 1. Динамическая модель двустороннего опорно-осевого тягового привода Многочисленные исследования показали, что зависимость момента сцепления М с от угловой скорости скольжения колеса ск имеет восходящий ( ск кр ) и падающий ( ск кр ) участки, где кр – критическая угловая скорость скольжения, соответствующая максимальному моменту сцепления. Если точка а находится на восходящем участке характеристики сцепле- 8 ния и не выходит за его пределы, то привод реализует устойчивый режим тяги (или выбега – при М т 0 ). Если точка а находится на падающем участке характеристики сцепления, то имеет место боксование. Момент сцепления колесной пары с рельсами определяется выражением М с R к (П о П) о k ( ск ) , (1) где R к - радиус колеса; П о - статическая нагрузка от колесной пары на рельсы; П - вертикальная динамическая составляющая в контакте колесной пары с рельсами, обусловленная колебаниями экипажа; k ( ск ) / о - безразмерная характеристика сцепления; - мгновенный коэффициент сцепления; о - потенциальный (максимальный) коэффициент сцепления. Так как t является функцией времени, то и момент сцепления является во времени величиной переменной – M c M c t . Тяговый момент, приложенный к колесной паре М т , имеет динамическую составляющую, обусловленную угловыми колебаниями привода: М т М т 0 Мt (2) В процессе возмущенного движения равновесная точка а совершает флуктуации в окрестности стационарного режима М* , * . Форма области флуктуаций зависит от величины динамических составляющих и М , а также фазовых соотношений между ними и по мере увеличения среднего тягового момента М * смещается к вершине восходящего участка характеристики сцепления М с ск . При этом возможен кратковременный заход равновесной точки на падающий участок характеристики М с ск с последующим возвращением (или не возвращением) на восходящий участок. Режим, при котором зона флуктуаций равновесной точки охватывает и восходящий, и падающий участки в окрестности вершины характеристики сцепления, является режимом реализации максимальной силы тяги или переходным режимом. Этот режим занимает промежуточное положение между режимами устойчивой тяги и боксования. Устойчив или неустойчив данный режим, можно судить по тому, как ведет себя равновесная точка: если она возвращается на восходящий участок кривой М с ск , то режим устойчив. Если же заход равновесной точки на падающий участок сопровождается её дальнейшим движением в область высоких скоростей скольжения, то считается, что устойчивая реализация тяги нарушена, и начинается боксование. Поэтому боксование традиционно регистрируется по факту роста скорости скольжения колес относительно рельсов. Практически невозможно заранее предсказать, при каком среднем тяговом моменте М * произойдет "срыв" к боксованию, так как характеристика сцепления не стабильна, а колебания экипажа и привода имеют случайный характер. Поэтому задача прогнозирования "предбоксовочного" состояния колес- 9 ной пары на первый взгляд кажется неразрешимой или решаемой весьма не точно. Так как переходный режим формируется из режима тяги, то его исследование начинаем с рассмотрения закономерностей режима тяги, а затем, увеличивая тяговый момент, исследуем эволюцию поведения системы и особенности переходного режима до потери системой устойчивости и начала боксования. Движение модели, показанной на рис.1а, описывается системой дифференциальных уравнений: 2 д u u 1J я к m o L oz m я L яz zк [J o u 1 J я m o L2o m я L2я ] 2 2 m o L ox m я L яx x к b д L д д c д L д д b д L д z к c д L д z к uM я ; к u u 1J я д uM я M с ; J o u 2J я (3) m к m o m я zк m o L oz m я L яz д b1 b д b п z к c1 c д c п z к b д L д д с д L д д b п c п ; m к m o m я x к m o L ox m я L яx д b x x к c x x к M с / R к . Система (3) получена из уравнений Ланранжа II рода с учетом соотношения я u 1д uк , где u - передаточное отношение тягового редуктора; - кинематическая неровность пути. Математическая модель привода построена с допущениями, общепринятыми для аналогичных динамических систем. Методика исследования режима тяги, при котором равновесная точка а в процессе флуктуаций, не выходит за пределы восходящего участка, сводится к линеаризации системы (3) в окрестности равновесного режима М* , * путем перехода к динамическим координатам, исключающим постоянные составляющие М и . В динамических координатах система (3) имеет вид: 2 д u u 1J я к m o L oz m я L яz zк [J o u 1 J я m o L2o m я L2я ] m o L ox m я L яx x к b д L2д д c д L2д д b д L д z к c д L д z к 0; к u u 1J я д M* ск ; J o u 2J я , (4) m к m o m я zк m o L oz m я L яz д b1 b д b п z к c1 c д c п z к b д L д д с д L д д b п c п ; m к m o m я x к m o L ox m я L яx д b x x к c x x к M* ск / R к где ск к x к / R к - угловая скорость скольжения колеса; П / П о - относительная динамическая составляющая вертикальной реакции в контакте колеса с рельсом, П bп ( z к ) сп ( z к ) ; R к о П о k - крутизна характеристики сцепления в окрестности равновесного режима. Система (4) может быть исследована с применением метода комплексных амплитуд и теории случайных функций. В качестве возмущения принят "белый 10 шум" по ускорению. Тогда спектральная плотность ускорения обобщенной координаты q с точностью до множителя будет Sq C Wq , дисперсия 2 Dq 2 Sq d , среднеквадратичное значение - q Dq . 0 В третьей главе "Режим реализации максимальной тяги" обоснован критерий оценки устойчивости системы при реализации максимальной силы тяги. Исследованы закономерности динамических процессов в тяговом приводе при переходе от тяги к боксованию. Сформированы информативные признаки переходного процесса. Наиболее характерные особенности переходного режима исследованы на модели колесной пары с приводом (рис. 2а), что продиктовано стремлением исключить влияние всех иных динамических процессов, кроме взаимодействия в контакте колеса с рельсом. М Мт М* По а Мт b Мс Мс 0 а) * кр б) * 1 к Рис. 2. Динамическая модель колесной пары Поскольку необходимо определить признак перехода системы из устойчивого динамического состояния в неустойчивое, не зависящий от формы характеристики сцепления и отражающий только результат фрикционного взаимодействия в условиях возмущенного движения, характеристика сцепления задана отрезками прямых, соответствующих восходящему и падающему участкам (рис. 2б). Тяговый момент М т М не зависит от скорости скольжения колесной пары и не имеет динамической составляющей. Вращение колесной пары под действием тягового момента и момента сцепления описывается дифференциальным уравнением к М т М с J (6) Выполняя для (6) процедуру перехода к динамическим координатам по описанной ранее методике, получим: к к М J (7) Полагая, что изменяется по закону а sin t , и, решая (7) методом комплексных амплитуд, получим выражение для амплитуды угловой скорости колесной пары в режиме тяги 11 ка а М* . (8) J Выражение (8) получено для динамического процесса с постоянной крутизной характеристики сцепления в окрестности равновесного режима М* , * . Но может иметь смысл эквивалентного демпфирования э системы с нелинейной характеристикой демпфирования, если ее движение близко к гармоническому, и амплитуда колебаний равна амплитуде колебаний линейной (линеаризованной) системы. Такое сопоставление линейной и нелинейной систем в теории колебаний называют методом гармонической линеаризации. В данном случае метод гармонической линеаризации применяется для идентификации параметра (демпфирования) линейной и нелинейной систем. Выражение для определения э получим из (8): 2 2 2 2 М * (9) J 2 2 э ка Для вычисления э подставляем в (9) значения ка , полученные в результате численного интегрирования нелинейного уравнения (6) при заданном тяговом моменте М т М или его нормированной величине М / М сmax , где M cmax R к П о о - максимальный момент сцепления без возмущений. Увеличивая тяговый момент от значений, соответствующих устойчивой тяге, до значений, при которых начинается боксование, получим зависимости: к , , ка , показанные на рис. 3. к , Как следует из рис. 3, в процессе перехода от тяги к боксованию происходит уменьшение э от некоторой большой величины, соответствующей режиму устойчивой тяги, до нуля – в момент потери устойчивости. Такой же результат дает исследование исходной нелинейной системы в переходном режиме методом энергетического баланса. Для переходного режима также характерным являются то, что при увеличении тягового момента на 5-8 % возрастают в 3-5 раз амплитуды динамических составляющих угловой скорости и углового ускорения колесной пары. Ярко выраженная нелинейность характеристики сцепления приводит к асимметрии колебательных процессов угловой координаты колесной пары. Тенденция к снижению до нуля величины э в переходном процессе сохраняется при различных частотах возмущения (рис. 4). Установленные закономерности переходного режима обусловлены изменением параметров фрикционного взаимодействия в контакте колес с рельсами. Они сохраняются и в том случае, когда колесная пара является частью более сложной динамической системы. Изменение в широких пределах коэффициента демпфирования в связях многомассовых систем равноценно изменению структуры системы, что проявляется в изменении ее собственных частот. 12 Влияние э на собственные частоты моделей крутильных систем одностороннего привода с недеформируемой (рис. 5а) и упругой (рис. 5б) осью колесной пары показано на рис. 6. э 10 3 , кНмс 1 , с0.25 0.6 к 0.2 f = 30Гц 0.5 0.15 f = 40Гц 0.4 0.1 0.05 f = 7Гц 0.3 0 0.9 0.91 0.92 0.93 0.94 0.95 0.96 0.97 0.98 0.99 а) 1м f = 15Гц 0.2 2 , c 4.0 f = 20Гц 0.1 к 3.0 2.0 0 0.89 1.0 f = 60Гц f = 10Гц 0.90 0.91 0.92 0.93 0.94 0.95 0.96 0.97 0.98 0.99 Рис.4.Зависимость э от частоты возмущения 0.0 Рис. 4. Зависимость э () при различной частоте возмущения. -1.0 -2.0 -3.0 -4.0 -5.0 0.9 0.91 0.92 0.93 0.94 0.95 , кНмс 0.96 б) 0.97 0.98 0.99 Jя 1м bм Jя J кп bм Jк со , bo Jк 600 см 500 см 400 э 300 а) 0,5 0,5 б) 200 Рис.5. Динамические модели крутильной системы привода Рис.5.Динамические модели тягового привода 100 0 -100 0.9 0.91 0.92 0.93 0.94 0.95 в) 0.96 0.97 0.98 0.99 1м f,Гц f,Гц , с0.25 0.2 кmin 0.15 d=0,3 кmax кср 2 1 d=0 1 d=0,5 d=1,0 d=0 d=0,3 1 d=0,6 0.1 ка 0.05 0 0.9 0.91 0.92 0.93 0.94 0.95 г) 0.96 0.97 0.98 0.99 1 м Рис.3. Динамические характеристики модели Рис.3.Динамические характеристики в переходном режиме модели в переходном режиме а) , кНмс б) , кНмс Рис.6. Собственные частоты моделей привода в переходном режиме Рис.6.Собственные частоты моделей приводов в переходном режиме Установленный факт снижения до нуля коэффициента демпфирования в контакте колеса с рельсом в переходном режиме позволяет определить параметры динамических процессов в системе "экипаж-привод-путь", наиболее "чувствительные" к изменению свойств фрикционного контакта и сформировать информативные признаки "предбоксовочного" состояния привода. Спектральные плотности ускорений обобщенных координат модели опорно-осевого привода при 500 кНмс ("тяга") и 0 ("срыв") показаны на рис. 7. Изменение среднеквадратичных значений ускорений обобщенных координат опорно-осевого привода в переходном режиме показано на рис. 8. Как следует из рис. 8, характер изменения среднеквадратичных значений к ) и вертикальных ускорений бук д , ускорений угловых координат модели ( сы ( zк ) существенно зависит от направления движения привода. Наиболее информативной и стабильной характеристикой динамических процессов в приводе в переходном режиме являются продольные ускорения буксы, анализ которых позволяет контролировать и прогнозировать состояние фрикционного контакта колеса с рельсом. 13 Таким образом, в качестве информативного признака для прогнозирования боксования приняты продольные ускорения буксы. Именно букса первой воспринимает и передает экипажу продольное усилие от оси колесной пары, возникающее в контакте колеса с рельсом при создании тяги. с 3 120 д, Угловые ускорения корпуса ТЭД 60 с-2100 50 30 срыв 60 тяга 20 40 10 реверс 20 0 1 11 21 31 41 51 61 71 81 91 F,Гц 0 а) 3 с тяга 80 40 0 120 40 600 800 кНмс ,1000 600 800 кНмс ,1000 600 800 кНмс ,1000 600 800 тяга срыв 30 80 20 тяга 10 40 0 1 11 21 31 41 51 61 71 81 91 реверс F,Гц 0 б) м с а) с-2 50 2 400 160 к, Угловые ускорения колесной пары 60 200 3 0 Вертикальные ускорения колесной пары 160 200 400 б) zк120 , 140 реверс мс-2 100 120 80 100 80 срыв 60 тяга 60 40 40 20 1 м с 2 тяга 20 0 11 3 21 31 41 в) 51 61 71 81 91 F,Гц 0 200 400 в) x к 40 , Продольные ускорения колесной пары 40 0 мс-2 35 30 реверс 30 25 20 15 20 срыв 10 тяга тяга 10 5 0 1 11 21 31 41 г) 51 61 71 81 91 F,Гц Рис.7. плотность ускоренийускорений обобщенных Рис. 7.Спектральная Спектральная плотность координат модели в режимах тяги и "срыва" к боксованию обобщенных координат модели 0 0 200 400 г) кНмс , 1000 Рис. 8. Среднеквадратичные значения ускорений обобщенных координат модели Преимуществами сделанного выбора также являются возможность реализации принятого решения для любого типа привода и минимальные изменения конструкции ходовой части при установке на буксе датчиков ускорений. Несмотря на очевидность этих утверждений, возможность прогнозирования боксования опорно-рамного привода по продольным ускорениям буксы также подтверждена в работе методами математического моделирования Для повышения качества и точности прогнозирования состояния фрикционного контакта колес с рельсами целесообразно дополнительно регистрировать вертикальные колебания буксы, что позволяет формировать нормированные статистические характеристики. Регистрация пространственных колебаний буксы переводит вопрос о про- 14 гнозировании состояния фрикционного контакта колеса с рельсом в плоскость распознания образов и процессов, что открывает большие возможности и перспективы с развитием микропроцессорной техники. В четвертой главе описаны принцип действия "Устройства обнаружения предельных по сцеплению режимов работы тягового привода рельсового транспорта" (патент РФ № 2175612), цель, методы и средства экспериментальных исследований. Представлены результаты поездных испытаний и их анализ. Принцип работы устройства основан на сравнении статистических характеристик пространственных колебаний буксы, вычисляемых за различные интервалы времени. По своей сути это – статистический анализатор стационарности динамических процессов. Важным достоинством устройства является его способность автоматически адаптироваться к изменяющимся в реальных условиях параметрам фрикционного контакта колеса с рельсом. Для экспериментальной проверки принципов работы, заложенных в устройстве, был разработан и создан микропроцессорный автоматический испытательный комплекс (АИК), регистрирующий (и запоминающий) продольные ускорения буксы за 5 с до срабатывания штатного реле боксования (РБ) электровоза и в течение 5 с после срабатывания РБ. Память АИК рассчитана на хранение 500 фрагментов длительностью 10 с каждый. Частотный диапазон регистрируемых ускорений 0-500 Гц, амплитуда – до 20g. АИК имеет автономный источник питания, он гальванически развязан от цепей электровоза и устанавливается на буксе (рис. 9). Во время ТО электровоза записанная информация периодически считывается в NOTEBOOK, подзаряжается аккумулятор АИК. Некоторые экспериментальные данные, полученные с помощью АИК, представлены на рис. 10 и рис. 11. Там же показаны результаты обработки сигнала по алгоритму, заложенному в устройстве и в разработанном на его базе комплексе предотвращения боксования (КПБ). Рис. 9. Автоматический испытательный комплекс на буксе электровоза ВЛ80 15 Рис.10. Результаты испытаний. Фрагмент 1 Рис.11. Результаты испытаний. Фрагмент 2 Точка "0" на оси времени соответствует моменту срабатывания штатного РБ. Как следует из рис. 10 и 11, обнаружение начинающегося боксования на основе анализа динамических процессов происходит на 1,2-1,8 с раньше, чем его регистрация с помощь штатного РБ. Натурные испытания подтвердили справедливость и эффективность принципов прогнозирования боксования, предложенных и разработанных в данном исследовании. Заключение В данной диссертационной работе поставлены и решены следующие задачи: - исследована специфика и установлены важнейшие закономерности динамических процессов в тяговых приводах локомотивов в режимах устойчивой тяги, а также – в режимах реализации предельных сил сцепления колес с рель- 16 сами; - на основе выявленных закономерностей динамических процессов в тяговых приводах разработан критерий оценки устойчивости максимального по условиям сцепления тягового момента, реализуемого колесной парой; - сформированы информативные признаки переходного процесса от режима тяги к режиму боксования; - разработано устройство обнаружения предельных сил сцепления для предупреждения боксования колесных пар локомотива; - проведена экспериментальная проверка полученных теоретических результатов и принципов, заложенных в разработанном устройстве. В процессе решения поставленных задач: 1. Разработаны математические модели и методы для исследования режимов реализации максимальных сил сцепления. 2. Методами математического моделирования исследовано влияние состояния фрикционного контакта на динамические показатели системы "экипаж-привод-путь" (формы движения, частоты, амплитуды колебаний, статистические характеристики). 3. Разработан, изготовлен и проверен в работе автоматический испытательный комплекс, способный без участия оператора регистрировать пространственные ускорения буксы в переходных режимах. 4. Предложенный алгоритм распознания переходного процесса позволяет обнаруживать его на 1,2-1,8 с раньше штатного реле боксования. Характерной особенностью данного алгоритма является его способность адаптироваться к изменяющимся параметрам фрикционного контакта. 5. Информация об уровне вибрации буксы может быть использована как в системе оптимального (с точки зрения устойчивой реализации максимальной для данных условий силы сцепления) управления тягой, так и для системы бортовой диагностики локомотива. 6. Результаты, полученные в работе, являются теоретической основой для создания комплекса предотвращения боксования и системы поосного управления тягой. 7. Применение на локомотивах противобоксовочных систем, построенных на принципах распознания динамических процессов, позволит получить ощутимую экономию за счет снижения расхода электроэнергии, уменьшения износа колес и рельсов, повышения ресурса тяговых передач, снижения расхода песка и повышения тяговых качеств локомотивов. Данная диссертационная работа написана на основе многолетнего опыта исследований в области динамики тягового привода локомотива и взаимодействия колеса с рельсом. В ней обозначено альтернативное направление в выявлении закономерностей взаимодействия фрикционного контакта с динамической системой "экипаж – тяговый привод – путь". Автор выражает благодарность д.т.н., профессору А.П. Павленко и к.т.н., доценту С.А. Синютину за научные консультации при подготовке материалов, вошедших в данную диссертацию. 17 Основные положения диссертации опубликованы в следующих работах: 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. Волков, И.В. Динамика тягового привода локомотива в режимах перехода от тяги к боксованию / И.В. Волков, П.А. Коропец // Электронный журнал "Исследовано в России", 137, стр. 1491-1497, 2007 г. http://zhurnal.ape.relarn.ru/articles/2007/137.pdf Коропец, П.А. Динамика тягового привода локомотива в режиме перехода от торможения к юзу / П.А. Коропец //. Вестник РГУПС. – Ростов н/Д. – 2004. – № 4. – С. 32 – 41. Коропец, П.А. Критерий качественной оценки тяговых свойств системы "колесо локомотива – рельс" / П.А. Коропец // Вестник РГУПС. – Ростов н/Д. – 2002. – № 2. – С. 31 – 36. Коропец, П.А. Динамический гаситель автоколебаний колесной пары / П.А. Коропец // Вестник РГУПС. – Ростов н/Д. – 2002. – № 1. – С. 41– 44. Патент 2175612 РФ, МКИ В 60 L 3/10. Устройство обнаружения предельных по сцеплению режимов работы тягового привода рельсового транспорта/ П.А. Коропец, В.С. Черный. – № 2000100712/28; заявл. 10.01.2000; опубл. 10.11.2001, Бюл. № 31. Коропец, П.А. Критерий оценки устойчивости максимального тягового момента, реализуемого колесной парой локомотива / П.А. Коропец, В.С. Черный // Вестник РГУПС. – Ростов н/Д. – 2000. – № 3. – С. 55 – 60. Коропец, П. А. Устройство раннего обнаружения боксования / П.А. Коропец // Тезисы докладов. Труды 59-й вузовской научно–технической конференции РГУПС. – Ростов н/Д. – 2000. – С. 123. Коропец, П.А. Выбор параметров тягового привода по условиям режима боксования / П.А. Коропец, А.С. Жаглин //. Деп. ЦНИИТЭИ МПС. Реф. – 1988. – № 6. Коропец, П.А. Динамика опорно–рамного привода грузового электровоза / П.А. Коропец // VI Всесоюзная конференция "Состояние и перспективы развития электровозостроения в стране". Тезисы докл. – Тбилиси. – 1987. С.35. Павленко, А.П. Динамические напряжения в колесной паре локомотива при нарушении контакта колес с рельсами / А.П. Павленко, П.А. Коропец // Материалы II международного трибологического симпозиума. Краков, 1986. – С. 413 – 418. Павленко, А.П. Особенности динамических процессов в двустороннем приводе локомотива при боксовании / А.П. Павленко, П.А. Коропец //. VI Национальный конгресс по механике. Дрезден, – 1985. – С. 152-156. Коропец, П.А. Снижение динамических нагрузок в оси колесной пары локомотивов с опорно–рамным приводом при боксовании / П.А. Коропец // Всесоюзная научно–техническая конференция "Создание и техническое обслуживание локомотивов большой мощности". Тезисы докладов. – Ворошиловград. – 1985. – 231 с. Павленко, А.П. Расчет динамических нагрузок в тяговом приводе локомотива в режиме юза / А.П. Павленко, П.А. Коропец // Всесоюзная научно– 18 14. 15. 16. 17. 18. техническая конференция "Создание и техническое обслуживание локомотивов большой мощности". Тезисы докладов, Ворошиловград, – 1985. – С. 25. Коропец, П.А. К вопросу оценки тяговых свойств привода локомотива / П.А. Коропец, Н.И. Горбунов // Повышение эффективности и качества работы электроподвижного состава: Тр. РИИЖТ. – Ростов н/Д. – 1984. – Вып. 176. – С. 21 – 25. Павленко, А.П. К выбору рациональных параметров тяговых приводов грузовых локомотивов из условий режимов боксования / А.П. Павленко, П.А. Коропец //. В кн. Проблемы механики железнодорожного транспорта. – Днепропетровск, 1984.– С. 128-129. Павленко, А.П. Метод расчета областей существования фрикционных автоколебаний в тяговых приводах локомотивов / А.П. Павленко, П.А. Коропец // Труды РИИЖТ. – Ростов н/Д. – 1984. – Вып. 176. – С. 25-32. Павленко, А.П. Анализ и пути снижения динамической нагруженности двустороннего привода локомотива / А.П. Павленко, П.А. Коропец, В.Д. Черников // В сб. Транспортное оборудование. ЦНИИТЭИТЯЖМАШ, 5 – 83 – 12, 1983. Павленко, А.П. Оценка и улучшение динамических качеств тяговых приводов электровозов повышенной мощности / А.П. Павленко, П.А. Коропец, А.Т. Глоба // В кн. "Проблемы механики железнодорожного транспорта". – К.: Наукова думка, 1980. – С. 105-106. 19 Коропец Петр Алексеевич ПРОГНОЗИРОВАНИЕ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЛОКОМОТИВА ПО ХАРАКТЕРИСТИКАМ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В СИСТЕМЕ "ЭКИПАЖ – ТЯГОВЫЙ ПРИВОД – ПУТЬ" Специальность: 05.22.07 - Подвижной состав железных дорог, тяга поездов и электрификация Автореферат диссертации на соискание ученой степени кандидата технических наук Подписано к печати 2007 г. Формат бумаги 60х84/16. Бумага офсетная. Ризография. Усл. печ. л. 1,0. Тираж 100. Заказ № Ростовский государственный университет путей сообщения. Ризография РГУПС. 344038, г. Ростов-на-Дону, пл. Ростовского Стрелкового Полка Народного Ополчения, 2.