17x
реклама

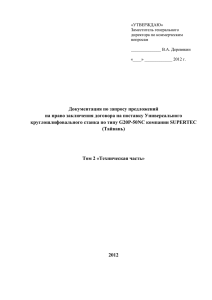
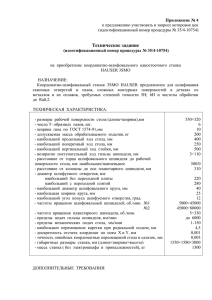
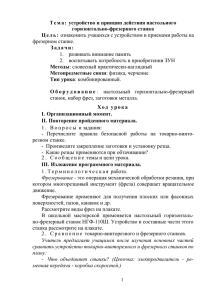
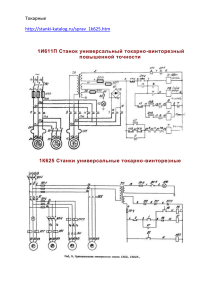
УДК 621.952 ИССЛЕДОВАНИЕ ГЕОМЕТРИЧЕСКОЙ ТОЧНОСТИ ШПИНДЕЛЬНЫХ УЗЛОВ СВЕРЛИЛЬНЫХ СТАНКОВ Н.Н.Коротун, доц.; С.Н.Максименко, инж. Контроль качества изделий весьма важен в современном машиностроении, в особенности велика роль контроля качества при производстве изделий по принципу полной взаимозаменяемости. Применение универсальных измерительных инструментов и калибров не всегда обеспечивает нужную точность и удобство контроля [1]. Для контроля точности шпиндельных узлов сверлильных станков были рассмотрены различные модели контрольных приспособлений [2]. Существенным недостатком таких приспособлений является то, что они громоздки и сложны в изготовлении и настройке. В настоящей работе предлагается модель контрольного приспособления, лишенная указанных недостатков. При проверке соответствия геометрической точности шпиндельных узлов сверлильных станков заданным нормам точности основным является допускаемое отклонение перпендикулярности оси вращения шпинделя к рабочей поверхности стола в вертикальной плоскости. Допускаемое отклонение не должно превышать 30 мкм; наклон верхнего конца шпинделя допускается только к колонне. Именно для контроля этого параметра предложено контрольное приспособление и проведены исследования точности шпиндельных узлов сверлильных станков. Общий вид контрольного приспособления показан на рис.1. Основными элементами приспособления являются: 1-втулка специальная, имеющая отверстие с конусом Морзе В18; 2 - плечо; Рисунок 1 - Приспособление контрольное 3 - державка; 4 - индикатор; 5- измерительный удлинитель; 6 - стопорный винт; 7 - съемный винт. Крепится и базируется втулка 1 к шпинделю станка по конусу Морзе. Измерительный удлинитель индикатора позволяет располагать конец шпинделя станка на высоте до 150 мм от плоскости стола при проведении измерений. Из статистических данных положения шпинделя станка относительно обрабатываемой плоскости известно, что оптимальной является высота 50-75 мм, что и выбрано нами за основу. Исследования геометрической точности положения шпиндельного узла станка заключаются в следующем. На столе станка (рис.1) крепили градуированное кольцо с делениями через 10 град. Внутренний диаметр кольца равен 180 мм, что позволяло располагать в нем измерительный индикатор на плече с R=8587 мм. Шпиндель с втулкой, индикатором и удлинителем поворачивали вокруг оси вручную и регистрировали отклонения индикатора при повороте шпинделя через каждые 10 град. Отклонения регистрировали на двух уровнях положения индикатора: H=50 и 75 мм. Исследования провели на трех серийных станах, подготовленных для реализации потребителям. Обработку результатов измерений проводили с использованием методов математической статистики. В качестве примера в табл.1 приведены обработанные данные измерений на одном из станков. Таблица 1 - Средние значения показаний индикатора при контроле станка Н=50 мм град. мкм 10 20 30 40 50 60 120 130 140 150 160 170 190 200 10 12 16 21 27 26 29 26 32 30 30 26 20 19 210 220 230 240 300 310 320 330 340 350 18 13 9 9 2 3 10 4 3 5 Н=75 мм мкм мкм 12 15 24 30 30 34 38 39 34 34 20 14 13 10 7 12 4 2 4 34 6 28 27 26 Для повышения надежности результатов измерений выполнили расчет их погрешности по зависимости Sñóì u2 y2 , (1) где u-погрешность концевых мер, мкм, u=0,2 мкм [2]; y- погрешность индикатора , мкм, y=0,7 мкм [2], Sñóì 0,2 2 0,7 2 0,73 ì êì . Погрешноcть измерений в процентах от допуска составляет Рисунок 2 - Схема построения отклонений X Sñóì Ò 100 0,73 100 2,4% , 30 (2) где Т-допуск, мкм, Т=30 мкм. Таким образом, погрешность измерений при исследованиях не превышала 2,4 %. Для обработки результатов исследований предложена схема построения отклонений в аксонометрии (рис.2). На схеме показана исходная окружность (эллипс-кривая 1) с разбивкой на 36 частей (точек), в которых были сняты показания индикатора. В каждой точке восстановлены перпендикуляры, на которых откладывали усредненные значения показаний индикатора (из таблиц). Вершины (концы) перпендикуляров соединены общей кривой (кривая 2) на рис.2. Как видно из схемы, кривые 2 отклонены от исходной кривой 1 на некоторый угол (). Определить угол отклонения кривой 2 от кривой 1, в общем случае, возможно путём построения касательной (прилегающей) плоскости к кривой 2. Однако с целью упрощения вместо прилегающей плоскости можно определить положение прилегающей прямой. Для этого необходимо на кривой 2 найти две точки (наивысшую и наинизшую) и провести прилегающую прямую к этим точкам. Такой прием возможен и в производственных условиях. К прилегающей прямой восстановили перпендикуляр. Угол между перпендикуляром к прилегающей прямой и осью шпинделя является искомым углом () отклонения оси вращения шпинделя от перпендикулярности к плоскости стола станка (рис.3). Исследуемые значения отклонений геометрической точности шпиндельного узла определяли из следующих соотношений. Диаметр прилегающей окружности к плоскости стола Дпр=172 мм (для R=86 мм). Тогда Y 0,03 0 (3) äî ï . ãðàä ar ct g 0ãðàä.0,6 ì èí , Äï ð 172 где Y-допускаемое отклонение точности положения шпинделя. Максимальное значение угла для первого станка равно: а) для положения шпинделя на отметке Н=50 мм: 0,032 0,01 H 1 50 ar ct g 0ãðàä.0,4 ì èí ; 172 б) для положения шпинделя на отметке Н=75 мм: 0,039 0,012 H 175 arct g 0ãðàä.0,53ì èí , 172 что не превышает допустимого значения. Максимальные значения угла для второго и третьего станков соответственно равны: а) для положения шпинделя на отметке Н=50мм: H 2 50 0ãðàä.1,3ì èí , H 3 50 0ãðàä.0,82ì èí ; б) для положения шпинделя на отметке Н=75мм: H 2 75 0ãðàä.2 ì èí , H 3 75 0ãðàä.1,69ì èí . Рисунок 3- Искомые значения углов Из расчетов следует, что станок первый соответствует требованиям точности, так как H1=50 и H1=75<доп. Станки второй и третий не соответствуют требованиям точности, так как H2=50 и H2=75>доп и H3=50 и H3=75>доп. Таким образом, предложенный метод контроля точности шпиндельного узла сверлильных станков позволяет без дополнительных затрат повысить точность контроля. Применим в условиях серийного производства и может быть рекомендован для внедрения на станкостроительных заводах. SUMMARY A model of the device to control the accuracy of the spindle rotation axis relative to the table working surface is proposed in this paper. СПИСОК ЛИТЕРАТУРЫ 1. Корсаков В.С. Основы конструирования приспособлений.-М.:Машиностроение,1983.-277с. 2. Абаджи К.Н., Дружинин Б.Н., Исаев Б.И. Контроль взаимного расположения поверхностей деталей машин.-М.:Машгиз, 1962.-115с. 3. Марков Н.Н.,Ганевский Г.М. Конструкция, расчет и эксплуатация измерительных инструментов и приборов.-М.:Машиностроение, 1981.-367с. Поступила в редколлегию 12 мая 1995г.