")
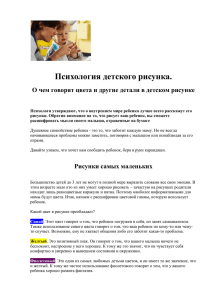
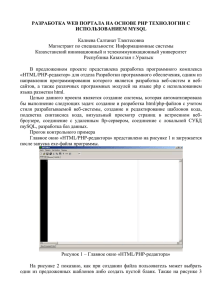
МИНОБРНАУКИ РОССИИ САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ «ЛЭТИ» ИМ. В.И. УЛЬЯНОВА (ЛЕНИНА) Кафедра АПУ ОТЧЕТ по лабораторной работе №1 по дисциплине «Теория автоматического управления» ТЕМА: Исследование колебательных контуров ВАРИАНТ № 2 Студент гр. 1362 Чернодоля П.И. Студентка гр. 1362 Фесько Н.В. Студентка гр. 1362 Фатихова Г.Ф. Преподаватель Жеронкин К.М. Санкт-Петербург 2023 ПРАКТИЧЕСКАЯ ЧАСТЬ Задача 1 1. Составить математическую модель в дифференциальных уравнениях для RLC-цепи, в соответствии с вариантом задания. 𝑢(𝑡) = 𝑢𝑐 (𝑡) + 𝑅𝑖(𝑡), где 𝑢(𝑡) – вход, 𝑢𝑐 (𝑡) – выход, 𝑅 – сопротивление на резисторе [Ом], 𝑖(𝑡) – сила тока в цепи [А]; 𝑖(𝑡) = 𝐶 𝑑𝑢𝑐 (𝑡) 𝑑𝑡 𝑢(𝑡) = 𝑢𝑐 (𝑡) + 𝑅𝐶 2. ; 𝑑𝑢𝑐 (𝑡) 𝑑𝑡 . Перейти от математической модели в дифференциальных уравнениях к передаточной функции. 𝑝= 𝑑 𝑑𝑡 ; 𝑢(𝑡) = 𝑢𝑐 (𝑡) + 𝑅𝐶𝑝𝑢𝑐 (𝑡); Далее применяется прямое преобразование Лапласа, считая, что все начальные условия нулевые: 𝑢(𝑠) = 𝑢𝑐 (𝑠) + 𝑅𝐶𝑝𝑢𝑐 (𝑠); 𝑢(𝑠) = (𝑅𝐶𝑝 + 1)𝑢𝑐 (𝑠); 𝑊(𝑠) = 3. 𝑢𝑐 (𝑠) 𝑢(𝑠) = 1 . 𝑅𝐶𝑝+1 Построить компьютерные модели в среде MATLAB/Simulink. (на основе ДУ и ПФ). Использовать в качестве входного источника сигнала: 3.1 Ступенчатый импульс (Step) со значением final value = 𝑈𝑛 (𝐼𝑛 ), где n – номер варианта. 3.2 Прямоугольный импульс (Pulse Generator) с амплитудным значением final value = 𝑈𝑛 (𝐼𝑛 ), где n – номер варианта. (не менее 3 прямоугольных импульсов за все время симуляции.) Для начала построим модель на основе передаточной функции с различными входными сигналами. Модель со ступенчатым импульсом представлена на рисунке 1. Рисунок 1 – Компьютерная модель ступенчатый импульс Модель с прямоугольным сигналом представлена на рисунке 2. Рисунок 2 – Компьютерная модель прямоугольный импульс Теперь построим модель на основе дифференциального уравнения с различными входными сигналами. Модель со ступенчатым импульсом представлена на рисунке 3. Рисунок 3 – Модель на основе дифференциального уравнения ступенчатый импульс Модель на основе диф. уравнения с прямоугольным сигналом представлена на рисунке 4. Рисунок 4 – Модель на основе дифференциального уравнения прямоугольный импульс 4. Получить переходные характеристики для каждой из построенных моделей при различных входных сигналах. Выполнить сравнительный анализ. Построим переходную характеристику для модели по передаточной функции. Реакция системы на прямоугольный сигнал представлена на рисунке 5, реакция системы на ступенчатый сигнал представлена на рисунке 6. Рисунок 5 – Прямоугольный сигнал Рисунок 6 – Ступенчатый сигнал Построим временную диаграмму для модели на основе дифференциального уравнения. Временная диаграмма для прямоугольного сигнала представлена на рисунке 7, временная диаграмма для ступенчатого сигнала представлена на рисунке 8. Рисунок 7 – Временная диаграмма на основе дифференциального уравнения прямоугольный сигнал Рисунок 8 – Временная диаграмма на основе дифференциального уравнения ступенчатый сигнал Как видно из выше приведенных графиков временных диаграмм, временная диаграмма модели на основе дифференциального уравнения полностью соответствует временной диаграмме модели на основе передаточной функции, что говорит о корректности модели, построенной на основе ПФ. 5. Построить ПФ объекта в MATLAB (Command Window) и получить следующие характеристики: - Переходная характеристика, импульсная; - Логарифмические частотные характеристики; - Амплитудно-фазовая характеристика; - Расположение корней объекта на корневой плоскости. Проанализировать полученные характеристики. График переходной характеристики представлен на рисунке 9. График импульсной характеристики представлен на рисунке 10. Рисунок 9 – Переходная характеристика ПФ Переходная характеристика демонстрирует нам реакцию системы на единичное воздействие. Рисунок 10 – Импульсная характеристика ПФ Импульсная характеристика – это реакция системы на импульс бесконечно малой длительности. В нашем случае амплитуда импульса равна 4500. График логарифмических частотных характеристик представлен на рисунке 11. Рисунок 11 – ЛЧХ ПФ Из графика 11 мы можем увидеть, что система пропускает только низкочастотные колебания. Сдвиг фаз между входом и выходом составляет 90 градусов. График амплитудно-фазовой характеристики представлен на рисунке 12. Рисунок 12 – АФХ ПФ По АФХ можно судить о частотном отклике линейной динамической системы. Фаза – угол радиус вектора, а амплитуда – длина. Так кривая не попадает и не охватывает точку (-1, 0), по критерию Найквиста система является устойчивой. График расположения корней объекта на корневой плоскости представлен на рисунке 13. Рисунок 13 – Расположение корней ПФ Корень отрицательный с нулевой мнимой часть, следовательно, система устойчивая. Из графика ПХ, рисунок 9, и графика импульсной характеристики, рисунок 10, можно сделать вывод, что система устанавливается, то есть приходит в устойчивое состояние, за 7 ∙ 10−4 секунд. Корень ПФ является отрицательным, что говорит нам об устойчивости системы. Задача 2. Для звена вида: T 2d 2 y (t ) dt 2 2T dy(t ) y (t ) kf (t ) dt Определить переходную и частотные характеристики (АФХ и ЛЧХ) при выбранных значениях (см. варианты задания) параметров T , , привести графики. Найдем передаточную функцию: Для перехода от ДУ к ПФ на первом этапе необходимо воспользоваться оператором дифференцирования: 𝑝 = 𝑑/𝑑𝑡 → 𝑝𝑘 = 𝑑 𝑘 Тогда, применив оператор дифференцирования, уравнение примет следующий вид: 𝑇 2 𝑝2 𝑦(𝑡) + 2 ∗ ζT𝑝 ∗ 𝑦(𝑡) + 𝑦(𝑡) = 𝑘 ∗ 𝑓(𝑡) Затем к полученном уравнению применяется прямое преобразование Лапласа, считая, что все начальные условия нулевые: 𝑇 2 𝑠 2 𝑌(𝑠) + 2 ∗ ζT𝑠 ∗ 𝑌(𝑠) + 𝑌(𝑠) = 𝑘 ∗ 𝐹(𝑠) Тогда по определению передаточная функция примет следующий вид: 𝑌(𝑠) 𝑘 = 2 = 𝑊(𝑠) 𝐹(𝑠) 𝑇𝑠 + 2ζT𝑠 + 1 Подставим значения, соответствующие варианту 𝑇 = 2, 𝑘 = 4, ζ = 0.2 . 𝑊(𝑠) = 4 4𝑆 2 + 0.8𝑠 + 1 Построим график ПХ, АФХ, ЛАЧХ, ЛФЧХ, используя программное средство MATLAB (Command Window). График ПХ приведен на рисунке 14. График АФХ приведен на рисунке 15. Графики ЛАЧХ и ЛФЧХ приведены на рисунке 16. Рисунок 14 – Переходная характеристика Рисунок 15 – АФХ Рисунок 16 – ЛAЧХ и ЛФЧХ 1. Проанализировать движение корней (траекторий корней) ХП на комплексной плоскости при изменении параметра , привести графики. Код для графика представлен на рисунке 17. Рисунок 17 – Код для оценки движения корней График движения корней с направлением их движения представлен на рисунке 18. Рисунок 18 – Корни при изменении 𝜁 = (0. .1) Как видно из графика на рисунке 18, движение корней начинается с мнимой оси, при 𝜁 = 0 и заканчивается на реальной оси. Чем больше значение 𝜁, тем меньше действительная и мнимая часть у корня. Это говорит о том, что при изменении параметра 𝜁 от 0 до 1, звено описывает колебательно-затухающий переходный процесс. Чем меньше 𝜁, тем больше значение колебательности системы, так как для пары комплексно 𝑏 сопряженных корней вида 𝑎 ± 𝑖𝑏 она рассчитывается как | |. 𝑎 2. Построить график зависимости резонансного пика АЧХ от коэффициента демпфирования в пределах 0 1 . Значение пика АЧХ определяется следующей формулой: А(𝜔𝑝 ) = 𝑘 2𝜁√1 − 𝜁 2 Код для вывода графика приведен на рисунке 19. График приведен на рисунке 20. Рисунок 19 – Код для вывода зависимости Рисунок 20 – Зависимость резонансного пика АЧХ На графике показана зависимость величины пика отклика системы от коэффициента затухания. Пик отклика - это максимальное значение отклика системы в окрестности частоты резонанса. Как видно из графика, пик отклика увеличивается по мере уменьшения коэффициента затухания. Это означает, что система становится более чувствительной к возмущениям в окрестности частоты резонанса. Коэффициент затухания - это параметр, который характеризует способность системы подавлять колебания. Чем больше коэффициент затухания, тем меньше амплитуда колебаний системы. Таким образом, можно сделать вывод, что увеличение коэффициента затухания приводит к уменьшению величины пика отклика системы. Это означает, что система становится менее чувствительной к возмущениям в окрестности частоты резонанса. Пик отклика достигает максимального значения при коэффициенте затухания, равном нулю. Это означает, что система становится полностью неустойчивой и отклик системы становится бесконечным. При коэффициенте затухания, равном единице, пик отклика равен 25. Это означает, что система реагирует на возмущения в окрестности частоты резонанса. Построить график зависимости резонансной частоты р от 3. постоянной времени T при выбранном значении . Примем 𝜁 = 0.2. 𝜔р (𝑇) = 1 √1 − 2𝜁 2 − собственная частота колебаний звена 𝑇 Код для вывода графика приведен на рисунке 21. График приведен на рисунке 22. Рисунок 21 – Код для вывода графика Рисунок 22 – Зависимость резонансной частоты На данном графике видно, что резонансная частота уменьшается с увеличением коэффициента затухания. Это связано с тем, что затухание уменьшает амплитуду вынужденных колебаний, что приводит к уменьшению резонансного эффекта. Резонансная частота системы стремится к бесконечности при нулевом коэффициенте затухания. Это связано с тем, что при нулевом коэффициенте затухания амплитуда вынужденных колебаний не уменьшается, что приводит к бесконечно большому резонансному эффекту. Резонансная частота системы стремится к нулю при бесконечно большом коэффициенте затухания. Это связано с тем, что при бесконечно большом коэффициенте затухания амплитуда вынужденных колебаний стремится к нулю, что приводит к полному затуханию резонансного эффекта. 4. Определить экспериментально оптимальное значение коэффициента демпфирования опт из условия минимума времени t р затухания процесса (принять за t р время, начиная с которого переходная характеристика остается в пределах 5% от установившегося значения). Как располагаются на комплексной плоскости корни ХП при опт ? Чему равна высота пика ЛАЧХ? Для решения данной задачи будем изменять значение 𝜁 от 0 до 1 с шагом 0.1. Так же отметим пятипроцентный интервал и посмотрим, какой из графиков быстрее всего в него приходит и остается в нем. Код для построения графиков представлен на рисунке 23. Общая картина графиков приведена на рисунке 24. Рисунок 23 – Код для построения графиков Рисунок 24 – Переходная характеристика Увеличим график и отмети 5ти процентный интервал. Увеличенный график представлен на рисунке 25. Рисунок 25 – Переходная характеристика (увеличенная) На графике красными линиями отмечен 5% интервал от 4. Как видно из рисунков, оптимальному значению 𝜁 соответствует красный график, то есть значение 𝜁 = 0.7 . График ПХ для этого значения представлен на рисунке 26. Рисунок 26 – График при оптимальном значении 𝜁 = 0.7 Корни представлены на рисунке 27. Рисунок 27 – Корни при оптимальном значении 𝜁 Пики ЛАЧХ представлены на рисунке 28. Рисунок 28 – Пики ЛАЧХ 5. Определить переходную и частотные характеристики (АФХ и ЛЧХ) при изменении знака коэффициента демпфирования на , привести графики. График ПХ при значении −𝜁 приведен на рисунке 29. Рисунок 29 – ПХ для – 𝜁 График ЛЧХ при значении −𝜁 приведен на рисунке 30. Рисунок 30 – ЛЧХ для – 𝜁 График АФХ при значении −𝜁 приведен на рисунке 31. Рисунок 31 – АФХ для – 𝜁 На графике ПХ видно, что амплитуда отклика системы увеличивается при увеличении времени. АФХ показывает, что корни пересекают мнимую ось, значит, что система не устойчива по критерию Найквиста. ЗАКЛЮЧЕНИЕ В ходе выполнения лабораторной работы мы построили математическую модель RC цепи и проанализировали характеристики и свойства этой системы. В рамках первой части задания были получены передаточная функция, переходная характеристика, амплитудно-фазовая характеристика, логарифмическая амплитудно-частотная характеристика и линейно-фазовая характеристика системы. Также были построены графики ступенчатого и прямоугольного импульсов. При воздействии ступенчатого входного сигнала выходной сигнал сначала равен нулю, затем начинает насыщаться и увеличиваться. При прямоугольном сигнале выходной сигнал постепенно затухает. Система пропускает низкочастотные колебания, а сдвиг фазы между входным и выходным сигналом составляет 90 градусов. Таким образом, система является устойчивой и способна интегрировать сигналы с течением времени. В рамках второй части задания мы рассмотрели звено второго порядка, построили передаточную функцию, логарифмическую частотную характеристику и амплитудно-фазовую кривую. Определили, что изменение параметра ζ от 0 до 1 приводит к движению полюсов с мнимой оси при ζ = 0 до отрицательного действительного числа при ζ = 1. При ζ = 𝜁опт = 0.7 колебания становятся затухающими. Экспериментально определенный коэффициент демпфирования 𝜁 = 𝜁опт = 0.7 обеспечивает затухание процесса. Мы построили графики передаточной функции и расположения корней характеристического уравнения на комплексной плоскости. Рассмотрены и представлены графики при изменении знака коэффициента демпфирования.