РГЗ
реклама

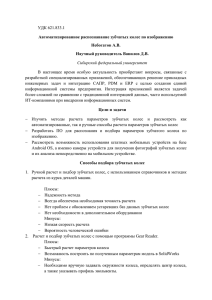
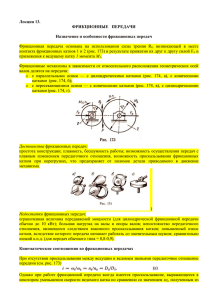
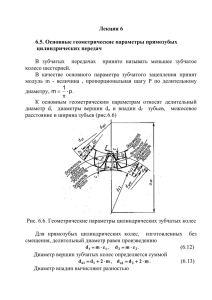
Министерство образования и науки Российской Федерации Федеральное агентство по образованию ГОУ ВПО «Сибирская государственная геодезическая академия» Г.В. Григорьева Детали приборов и основы конструирования. Расчет и конструирование зубчатых механизмов. Методические указания. Новосибирск СГГА 2007 Настоящие методические указания содержат краткие сведения по теории зубчатого зацепления, пример расчета с комплектом заданий, контрольные вопросы для самопроверки, список рекомендуемой литературы. 2 Содержание 1 Основные понятия и определения.................................................................4 2 Параметры зубчатого зацепления..................................................................8 2.1 Выбор модуля и материалов зубчатых колес.........................................8 2.2 Выбор коэффициентов смещения зубчатых колес...............................11 2.3 Расчет размеров зубчатых колес............................................................11 2.4 Конструктивные размеры зубчатых колес............................................15 2.5 Определение сил, действующих в зацеплении.....................................16 3 Расчет и конструирование валиков и опор...................................................17 3.1 Расчет и конструирование валиков........................................................17 3.2 Выбор вида подшипников и конструктивное оформление опор........18 3.3 Оценка долговечности шарикоподшипников.......................................20 4 Крепление деталей на валике.........................................................................22 5 Общая компоновка и конструирование несущей детали подшипникового узла....................................................................................................................24 6 Содержание отчета по заданию и указания по его оформлению................24 7 Контрольные вопросы.....................................................................................25 Приложение А. Пример выполнения работы....................................................26 Приложение Б. Варианты заданий.....................................................................37 Приложение В (рекомендуемое). Библиография..............................................41 3 1. Основные понятия и определения Зубчатые механизмы предназначены для передачи вращательных движений или моментов сил с одного вала на другой с заданным отношением угловых скоростей, а также для преобразования вращательного движения в поступательное и наоборот. Зубчатые колеса, образующие передачу, закреплены на валах, установленных в направляющих для вращательного движения – подшипниковых узлах. В качестве опор валов широко используются подшипники. При передаче вращения между параллельными валами применяют цилиндрические зубчатые колеса. В приборах зубчатые колеса с меньшим числом зубьев называют шестернями или трибками. Цилиндрические зубчатые механизмы выполняют с внешним или внутренним зацеплением (см. рисунок 1а), б), в). Внутреннее зацепление позволяет уменьшить габаритные размеры механизма, однако технологически оно более сложно. Цилиндрические зубчатые колеса могут иметь прямые или косые зубья. Механизмы с прямыми зубьями (рисунок 1а) применяют в сравнительно тихоходных передачах при малых динамических нагрузках. Основным преимуществом этих механизмов является отсутствие осевых усилий, благодаря чему имеется возможность передвижения колес вдоль оси во время работы. Недостаточная плавность прямозубого зацепления приводит к появлению шума в процессе работы. Для устранения этого недостатка применяют косозубые цилиндрические механизмы (рисунок 1б), имеющие повышенную прочность зубьев и большую плавность зацепления. Недостаток этих передач – наличие осевых усилий, действующих на колеса и подшипниковые узлы. Для передачи вращения между пересекающимися осями валиков применяют конические зубчатые колеса (рисунок 1г). Они могут иметь прямолинейные и криволинейные зубья, угол между осями валов обычно равен 90º. Для преобразования вращательного движения в поступательное и наоборот применяют реечные механизмы (рисунок 1д), а для передачи вращения между перекрещивающимися осями валиков – червячные механизмы (рисунок 1е). Различают закрытые и открытые зубчатые механизмы. Открытыми обычно бывают тихоходные передачи. Эти передачи смазывают периодически. Закрытые же передачи смазываются струйной смазкой под давлением или с помощью масляной ванны, обеспечивающей постоянную смазку в процессе работы. В приборах зубчатые механизмы применяют как для понижения числа оборотов (редукторы), так и для повышения числа оборотов (мультипликаторы). Основной кинематической характеристикой зубчатого механизма является передаточное отношение ί12 равное отношению угловой скорости шестерни ω1 к угловой скорости колеса ω2 ί12 = ω1/ω2; ί21 = ω2/ω1. 4 5 Зубчатые механизмы, применяемые в различных отсчетных устройствах приборов, должны обеспечивать высокую точность передачи движения при наличии больших передаточных отношений. Помимо передаточного отношения ί12 пользуются понятием передаточного числа u12, которое равно отношению числа зубьев колеса z2 к числу зубьев шестерни z1 (u12=z2/z1). В частном случае ί12= u12 при ί12 = const. Зубчатые механизмы по сравнению с другими видами передаточных механизмов отличаются достаточной компактностью, высоким КПД , постоянством передаточного отношения, надежностью работы и большей долговечностью, простотой ухода и обслуживания. К основным недостаткам зубчатых механизмов относятся: сравнительная сложность изготовления, невозможность бесступенчатой регулировки передаточного отношения, появление вибраций и значительных ударных нагрузок при недостаточно точном изготовлении. 6 7 2. Параметры зубчатого зацепления Одним из важных этапов проектирования зубчатой передачи является правильный выбор исходных геометрических параметров с учетом конкретных условий ее работы. Иногда условия работы передачи требуют нарезания зубьев колес со смещением нарезающего инструмента. Нарезания зубьев колес со смещением инструмента (коррегированием) может быть применено в целях повышения изгибной прочности зубьев (достигается увеличением их толщины); повышения контактной прочности (достигается увеличением радиуса кривизны профилей в полосе зацепления); устранения подрезания зубьев шестерни при нарезании (при малом числе зубьев шестерни); изменения межосевого расстояния зубчатой передачи (без изменения числа зубьев и модуля). В основе теории зацепления лежит основная теорема зацепления. Для того, чтобы профили зубьев находились в зацеплении (не отставали и не врезались), они должны иметь общую точку касания, общую нормаль, проходящую через эту точку, которая должна проходить через мгновенный центр скоростей в их относительном движении, называемом полюсом зацепления. Нарезание эвольвентных зубчатых колёс может производиться различными методами: копированием, обкаткой и накаткой. Мелкомодульные (исходный контур ГОСТ 9587-68) малонагруженные колёса с числом зубьев ≥ 17 можно нарезать без смещения, так как на активной (рабочей) части зуба в этом случае эвольвентный профиль не подрезается, а прочность зуба снижается незначительно. 2.1. Выбор модуля и материалов зубчатых колёс Проектный расчёт модуля производится приближенно из условия обеспечения достаточной изгибной прочности зубьев колёс по формулам таблицы 1. Таблица 1 Передача Цилиндрическая Реечная Коническая Червячная Модуль mn 1, 4 3 mn ui mi i Kn P K Kv cos YF u m cos mср 1, 4 3 mn 8 M i K Kv YFi M i K K v YFi ui mi i 1,9 M k K K v YFk uk q cos k В таблице 1: Mi – крутящий момент (в Н∙мм) на валу зубчатого колеса Zi; P – усилие на рейке (в Н); K и Kv - коэффициенты концентрации и динамичности нагрузки (для данных заданий, принимаемые равными единице); mi – коэффициент длины зуба; K n – коэффициент, учитывающий повышение нагрузочной способности за счёт увеличения суммарной длины контактной линии; для прямозубых колёс K n =1,0; для косозубых колёс K n = 1,35 при твёрдости рабочих поверхностей зубьев не более НВ 350 и K n =1,15 при твёрдости выше НВ 350. YF – коэффициент прочности зуба выбирается из табл.2. Таблица 2 Число зубьев колес Коэффициент YF при коэффициенте смещения исходного контура Х 10 12 14 16 17 20 25 30 40 50 60 80 100 -0,5 -0,2 0 +0,2 +0,5 +0,8 4,67 4,24 4,02 3,93 3,89 3,87 4,39 4,14 3,90 3,83 3,82 3,81 3,80 4,47 4,30 4,12 3,96 3,85 3,75 3,73 3,73 3,74 3,75 4,05 3,99 3,97 3,90 3,81 3,75 3,68 3,66 3,68 - 3,55 3,56 3,57 3,58 3,59 3,60 3,61 3,62 3,62 3,63 - 2,96 3,08 3,14 3,17 3,21 3,25 3,33 3,37 3,44 3,48 3,52 - Для косозубых цилиндрических, конических и червячных передач коэффициент YF выбирается по эквивалентному числу зубьев колеса (см. таблицу 3). Цилиндрическая косозубая Zэ Z cos 3 Коническая Zэ Z cos Таблица 3 Червячная э cos3 Выбор материала производится с учетом обеспечения необходимой износостойкости поверхностных слоев зубьев. Для обеспечения лучшей прирабатываемости и повышения стойкости против заедания рекомендуется выбирать материал для колеса менее твердым, чем для шестерни. Допустимые напряжения и находят по таблице 4. 9 Материал Сталь 15 Сталь 35 Сталь 45 Сталь 50 Сталь 55 Сталь 15 Х Сталь 20 Х Сталь 40 Х Дюралюмин ий Д16М Дюралюмин ий Д16Т Латунь ЛС ЛС 59-1 Бронза ОФ10-1 Бронза АЖ9-4Л Вид термообработк и нормализация нормализация нормализация нормализация нормализация улучшение улучшение улучшение Таблица 4 Допускаемы Механические свойства е Твердость Предел Предел напряжения по протекуБринеллю чности чести σт , изгиба [σ]u , н/мм2 HB σв,н/мм2, н/мм2 , не менее не менее 370 225 70 140-187 530 315 100 167-217 600 350 115 180-229 630 370 120 185-241 650 380 125 179-217 690 490 130 190-241 880 690 170 257-285 980 780 190 отожженный - 216 50 36 закаленный - 390 - 90 - 430 - 105 твердая - 90-120 180 100 35 - 110-120 390 195 65 В формулы таблицы 1 подставляют значения YF и и менее прочных зубьев, для которых отношение YF / и большее. Рассчитанный по данным формулам модуль округляют до ближайшего большего значения в соответствии с СТ СЭВ 31076, а для червяной передачи по СТ СЭВ 267-76. В приборостроении ограничиваются следующими значениями модуля, мм: СТ СЭВ 310-76 – 0,05; 0,06; 0,08; 0,10; 0,12; 0,15; 0,2; 0,25; 0,3; 0,4; 0,5; 0,6; 0,8; 1,0; 1,25; 1,5; 2,0; 2,5; 3; 4; 5; СТ СЭВ 267-76 – 0,10 ; 0,125 ; 0,16 ; 0,20 ; 0,25 ; 0,315 ; 0,40 ; 0,50 ; 0,63 ; 0,80 ; 1,0 ; 1,25 ; 1,6 ; 2,0 ; 2,5 ; 3,15 ; 4,0 ; 5,0. 10 2.2Выбор коэффициентов смещения зубчатых колес Вид исправления зубчатых колес определяется необходимостью устранения заклинивания зубчатой передачи и подрезания зубчатых колес при их изготовлении. В приборостроении чаще всего применяют так называемое равносмещенное зацепление (высотная коррекция), которое может быть осуществлено при условии z1+z2 > 2zmin. В этом случае относительный сдвиг для колеса x2 = -x1. Для равносмещенных колес угол зацепления, радиусы начальных окружностей и межосевое расстояние равны соответствующим параметрам зацепления, составленного из нулевых колес, а радиусы окружностей впадин и вершин изменятся на величину абсолютного сдвига ± x·m. При изготовлении зубчатых колес стандартным инструментом , для которых * h a=1; α°=20; zmin=17, величина относительного сдвига определится из условия отсутствия подрезания по формуле x 17 - z 17 При расчёте косозубых и конических зубчатых колёс вместо числа z в формулу нужно подставить число зубьев эквивалентных колёс zэ рассчитанных по формулам таблицы 3. 2.3. Расчёт размеров зубчатых колёс При известном модуле расчёт геометрических параметров, необходимых для дальнейшего проектирования и оформления чертежей, ведётся с учётом формул таблиц 5,6 и 7. Таблица 5 Основные размеры цилиндрических прямозубых и косозубых передач с внешним и внутренним зацеплением (рис.2). Наименование Обозначе эл-та Формула ние передачи Модуль нормальный Шаг нормальный Угол наклона зубьев Торцевой модуль Торцевой шаг Диаметр длительной окружности Длина зуба Коэффициент длины зуба mn pn β mt pt di mn=m (по СТ СЭВ 310-76) pn=π∙mn β – согласно задания mt = mn/cosβ pt = pn/cosβ di = mt∙zi bе ψmi bе = ψmi∙mn ψmi = 6÷10-для прямозубых колёс ψmin = 10÷25-для косозубых колес 11 Радикальный зазор зубчатой передачи Коэффициент радиального зазора исходного контура Высота делительной головки зуба Коэффициент головки зуба Высота делительной ножки зуба Высота зуба c с = с* mn c* ha при mn 0,5 c*= 0,5 при 0,5<mn 1 c* = 0,35 при mn>1 c* = 0,25 ha = (ha* xi)∙mn ha* ha* = 1 hf hf = (ha*+ c* xi) mn h h = ha+hf Для колёс с внешним зацеплением Диаметр окружности выступов Диаметр окружности впадин Межосевое расстояние dai dai = di +2hai dfi dfi = di – 2hfi aw aw = 0,5 (d1+d2) Для колёс с Диаметр окружности выступов Диаметр окружности впадин Межосевое расстояние внутренним d ai зацеплением dai = di – 2hai dfi dfi = di + 2hfi aw aw = 0,5(d2 – d1) Реечная передача является частным случаем цилиндрической передачи. При радиусе ведомого колеса, равном бесконечности r , колесо превращается в прямую рейку. Реечные передачи применяются для преобразования вращательного движения колеса в поступательное движение рейки и обратно. Зубья рейки имеют прямолинейный профиль с углом наклона боковых сторон в нормальном сечении α°=20, в соответствии с исходным контуром СТ СЭВ 309-76. Основные размеры реечной передачи можно рассчитать по формулам таблицы 5. Линейное перемещение рейки, соответствующее углу поворота колеса определится по формуле L 12 Pt z 360 Таблица 6 Основные размеры конической прямозубой передачи (рис.3). Наименование элемента Обозна Формула передачи чение Угол делительного конуса шестерни 1 колеса 2 Коэффициент длины зуба ψm Внешний окружной модуль 1 arcctg 2 arcctg z1 z2 z2 z1 ψm=3÷10 me me mср zi zi m sin i (по СТ СЭВ 310-76) Шаг внешний Pe Pe me Ширина зубчатого венца b b me m Внешнее конусное расстояние Re Re 0,5 me z12 z22 Среднее конусное расстояние R R Re 0,5 b Средний окружной модуль mcp Внешний делительный диаметр dei Внешняя высота головки зуба Рассчитывается по формуле табл. 1 dei me zi hae1 (ha x1 ) me haei hae 2 2ha me hae1 Внешняя высота ножки зуба h fei hfei haei c me Внешняя высота зуба hei hei haei h fei Угол головки зуба Угол ножки зуба Угол конуса вершин Угол конуса впадин Внешний диаметр вершин зубьев haei ) Re h Q fi arctg ( fei ) Re ai i Qai Q ai arctg ( Q ai Q fi ai fi fi i Q fi daei daei dei 2haei cos i 13 Таблица 7 Основные размеры червячной передачи ( рис. 4) Наименование элемента Обозна- Формула передачи чение Осевой модуль червяка, равный торцевому модулю ms Рассчитывается по формуле колеса Табл.1 (по СТ СЭВ 267-76) Расчётный шаг червяка р1 P1 = π·ms Ход витка pz1 Pz1 = p1·z1 Делительный диаметр червяка червячного колеса d1 d2 d1 = q·ms d2 = z2·ms Mежосевое расстояние aw aw = 0,5ms(z2+q) Угол подъёма червяка arctg (z1 / q) Высота головки витка червяка и зуба колеса ha ha1 = ha2 = ha∙ms(ha*=1) Высота ножки витка червяка и зуба колеса hf hf1 = hf2 = (ha* +c*)·ms;(c*=0,2) Диаметр вершин витка червяка и зуба колеса dai dai = di +2ha Диаметр впадин витка червяка и dfi зуба колеса dfi = di – 2hf Наибольший диаметр червячного колеса d am2 d a 2 6ms /( z2 2) dam2 Длина нарезанной части червяка b1 b 1 (11 0,06z 2 ) m s Ширина венца червячного колеса Радиус выемки поверхности вершины зубьев червячного колеса b2 b2 0, 75 d a1 R R = 0,5·d1-ms Фаска у червячного колеса С С = 0,5 ms 14 2.4 Конструктивные размеры колес Шестерни и червяки изготавливаются либо заодно с валом, либо насадными, как показано на рис.5. В последнем случае расстояние от впадин зуба до отверстия под валик не должно быть меньше 2,5m. На рис.6 приведена типовая конструкция и размеры ступицы и диска металлического цилиндрического колеса. Эти размеры могут быть приняты и для ступиц других зубчатых колес. 15 2.5 Определение сил, действующих в зацеплении В общем случае на колесо любой зубчатой пары по нормали к боковой поверхности зуба действует нормальное усилие Fn , а составляющими этого усилия являются окружное Ft , радиальное Fr и осевое Fx усилия, векторы которых взаимно перпендикулярны. При определении сил в зацеплении цилиндрических и конических передач можно пренебречь силами трения, в червячных передачах эти силы учитывают. Формулы для определения усилий приведены в таблице 8. Таблица 8 Формулы для определения сил, действующих в зацеплении. Усилие Цилиндрически е (см. рис. 10,а) Конические (см. рис. 10, б) Червячные (см. рис. 10 ,в) Окружное Ft M 2 / 0,5d 2 Ft M 2 / 0,5d f 2 Ft M 2 / 0,5d 2 Осевое Fx Ft tg Fx Ft tg sin Fx Ft tg ( ) Радиальное Fr Ft Нормальное Fn Ft tg cos 1 cos cos Fr Ft tg cos Fn Ft 1 cos Fr Ft Fn Ft tg cos( ) 1 cos cos( ) Приведённый угол трения в червячной паре находится из выражения arctg f , cos где f – коэффициент трения. Для передачи, работающей без смазки, коэффициент трения находится по табл.9. 16 Таблица 9 Коэффициенты трения для передач , работающих без смазки. материал Сталь Бронза Латунь Дюралюмини конструкционная оловянистая й Сталь конструкцио 0,18 0,16 0,19 0,20 нная Бронза оловянистая 0,16 0,20 0,16 0,22 Латунь 0,19 0,16 0,17 0,26 Дюралюмин ий 0,20 0,22 0,26 0,22 Текстолит 0,22 0,23 0,23 0,30 3. Расчёт и конструирование валиков и опор 3.1 Расчёт и конструирование валиков Проектный расчёт валика сводится к приближенному определению минимального диаметра валика. Так как валикам приборных передач очень часто предъявляются повышенные требования по жёсткости, то приближённый расчёт рекомендуется вести по формуле: dmin (7, 2 8,5) 4 M к , где d min - минимальный диаметр валика, [мм]; M к - крутящий момент на валике, [н∙м]; Валики приборных передач изготавливаются как правило из стали. Наиболее часто используются стали 35, 40 и 45 по ГОСТ 1050-84. Диаметры шеек ступеней валика назначаются по конструктивным соображениям с учётом удобства посадки на валике подшипников качения, зубчатых колёс, требований фиксации деталей на валике посредством заплечников и упорных втулок и т.п. (при условии, что любой диаметр не будет меньше d min ). Диаметры шеек валика должны быть округлены до ближайшего стандартного диаметра по ГОСТ 6636-69 (в интервале от 1 до 25мм стандартными являются числа, кратные 0,5 , а в интервале от 26 до 50 мм – целые числа). Проверочный расчёт валиков приборной передачи производится после того, как конструктивно определятся продольные размеры валиков. Только после этого можно определить изгибающие моменты в сечениях валиков. 17 Проверочный расчёт производят в следующем порядке: а) определяют опорные реакции; б) строят эпюры изгибающих и крутящих моментов; в) по характеру эпюр определяют опасные сечения, для которого подсчитывают эквивалентный момент М экв . по гипотезе наибольших касательных напряжений. Мэкв. М2и М2к , М и - суммарный изгибающий момент в опасном сечении; М к - крутящий момент в том же сечении; где г) подсчитывают эквивалентное напряжение экв в опасном сечении по формуле экв М экв [ ]и , 0,1d в3 где d в - диаметр опасного сечения валика; []и - допускаемое напряжение на изгиб (табл. 4). 3.2 Выбор вида подшипников и конструктивное оформление опор Направляющие вращательного движения, применяемые в приборостроении, имеют широко разветвленную классификацию. Каждый известный вид направляющих имеет свою область применения. Для зубчатых передач широко применяются как цилиндрические направляющие с трением скольжения, так и направляющие с трением качения (стандартные радиальные шарикоподшипники). По совокупности свойств и их влиянию на показатели качества передачи оба вида опор почти равноценны. Поэтому выбор подшипников на начальном этапе проектирования является типичным примером конструктивного решения в условиях недостаточной исходной и текущей информации. В этом случае приходится выполнять проработки конструкции и накапливать сравнительную информацию для двух вариантов до тех пор, пока выявятся существенные преимущества одного из них. По сравнению с опорами с трением скольжения шарикоподшипники имеют меньшие потери на трение, допускают достаточно большие нагрузки и скорости, износоустойчивы, нетребовательны к смазке и малочувствительны к температурным колебаниям. Однако они сложнее по конструкции и имеют большие габариты по диаметру. Большие габариты шарикоподшипников по диаметру накладывают некоторые ограничения на компоновку передачи. При консольном расположении зубчатых колес еще можно найти приемлемый вариант конструкции. В других вариантах задания по условиям компоновки может оказаться, что наиболее целесообразным, а иногда и единственно возможным, будет применение подшипников с трением скольжения. В данном задании в целях повышения уровня стандартизации передачи целесообразно выбрать для дальнейшей проработки 18 стандартные радиальные шарикоподшипники. Номер подшипника определяется по известному диаметру d min вала. На рис.7 показаны: а)– диаметральный разрез стандартного радиального однорядного подшипника; б)– условное изображение шарикоподшипника на сборочном чертеже. Стандартный радиальный однорядный шарикоподшипник состоит из внутреннего 1 и наружнего 2 стальных закаленных колец с дорожками качения, между кольцами располагаются 6-12 стальных шариков, которые удерживаются между собой на равных расстояниях при помощи сепаратора 4. В свободном состоянии внутреннее кольцо может смещаться относительно диаметра вала за счёт специально предусмотренного начального радиального зазора q r , который определяет три вида смещения: радиальное на величину зазора q r = 0,005÷0,022мм, осевое 2S = (5÷10) q r и перекос осей колец на угол 8 . Такая конструкция подшипника допускает различные варианты конструкций подшипниковых узлов. Обычно внутреннее кольцо устанавливается на вал по диаметру d (рис.7б) и упирается одним торцом в заплечник вала h1 или в торец детали, закреплённой на валу, а наружное кольцо устанавливают в отверстие несущей детали по диаметру D и упирается противоположным торцом в бурт несущей детали h 2 или торец крышки, гайки, пружинного кольца и т.п. Наименьшие размеры заплечников и буртов ограниченны размерами округленных фасок r на кольцах подшипников. Наибольшие размеры заплечников обычно не превышают толщину колец и могут быть определены по формуле h1( 2 ) max Dd b с последующим округлением определяющих размеров до целых величин. Очень часто валы располагают на двух шарикоподшипниках, установленных «в распор». На рис. 8 показана установка подшипников «в рaспор»; а)– регулировка зазоров осуществляется путём осевого смещения наружних колец за счёт набора прокладок под одной из крышек с последующей затяжкой крышки винтами (1- винт, 2 – крышка, 3 – набор прокладок, 4 – шарикоподшипники, 5 – несущая деталь, 6 – вал, А – места возможного расположения на валу зубчатых колес, муфт и т.д.). б)– регулировка зазоров в подшипнике осуществляется за счёт смещения внутренних колец при помощи установочных колец с последующим их соединением с валом штифтами (1 – вал или ось, 2- штифт, 3 – шарикоподшипники, 4 – несущая деталь, 5 – кольцо установочное, А – места возможного расположения кинематических элементов). Роль установочных колец могут выполнять ступицы зубчатых колес, одно из которых можно заменить заплечником вала. Оба варианта основаны на общем принципе регулировки зазоров в шарикоподшипниках и предохранения вала от возможных смещений. Этот принцип заключается в монтажном осевом смещении внутренних колец относительно наружных или наоборот. Рассмотренные подшипниковые узлы работают нормально при условии 19 L (3 8)d , где L – расстояние между подшипниками, d – внутренний диаметр подшипника. На основании принципа равной точности для зубчатых передач, составленных из колёс 7-й степени точности, рекомендуется применять подшипники 6-го класса точности. Класс точности подшипника указывается перед его условным обозначением:6 – 1000096. Требования к посадочным местам под подшипники на валу и в несущей детали приведены в рис.9. При назначении посадок учитываются условия работы подшипников: вал вращается, нагружение наружного кольца местное, режим работы нормальный. Для смазки подшипников используются консистентные или жидкие смазки. Смазка применяется с целью уменьшения потерь на трение и увеличения долговечности подшипников. Консистентная смазка хорошо удерживается на рабочих поверхностях и широко применяется в приборах, работающих в достаточно большом диапазоне температур. В каждый подшипник закладывается количество смазки М см , обычно равное объёму двух шариков данного подшипника: М см 0,002 Dш [г], где Dш - диаметр шарика, мм. Для заданных условий работы механизма может быть использована смазка ЦИАТИМ-201 по ГОСТ 6267-74. 3.3 Оценка долговечности шарикоподшипников Величина реакций в опорах определяет долговечность выбранных подшипников. Оценка долговечности шарикоподшипников производится приближённо по наиболее нагруженной опоре. Если частота вращения вала n< 1об/мин, то расчёт производят только на статическую грузоподъёмность по условию Сор≤[Q], где [Q] – допускаемая статическая грузоподьёмность; Сср = Кб∙Р0 – расчётная статистическая грузоподьемность; Кб = 0,5÷3 – коэффициент запаса при статическом нагружении; Р0 – эквивалентная статистическая нагрузка. При действии радиальной Rr и осевой Rx нагрузки Р0 = max[(x0Rr + y0Rx);Rr], где x0, y0 - коэффициенты, соответственно, радиальной и осевой нагрузок. Для радиальных однородных шарикоподшипников можно принять x0 = 0,6; y0 = 0,5 20 21 4. Крепление деталей на валике Для закрепления зубчатых колёс и других деталей вращения на валиках, передающих вращающий момент, используют стандартные детали шпонки и штифты. Шпонки устанавливаются при диаметрах вала не менее 3хмм (рис.10). При требовании устранения в передачи метрового хода в основном применяют для соединений валиков с зубчатыми колёсами штифты (рис.11). При выборе диаметра штифта dш≤(0,2÷0,25)dв, где dв – диаметр участка вала под штифт. Найденный диаметр штифта необходимо округлить до ближайшего стандартного размера: для конических штифтов по ГОСТ 3129–60 и для цилиндрических по ГОСТ 3128-60 ([2], табл. 60 и табл.61). Выбранный штифт подвергается проверочному расчёту на срез по формуле ср 4М к ср , d ш2 d в ср - допускаемое напряжение на срез, величина которого для стали 50÷70 МПа, для цветных металлов и сплавов 20÷30 МПа. 22 23 5. Общая компоновка и конструирование несущей детали подшипникового узла Компоновать – значит составлять, складывать. Имея готовые элементы конструкции, несложно объединить их в конструкцию сначала подшипникового узла второго вала, затем первого и решать вопрос компоновки всей передачи. На рис.12 и 13 показаны сборочные чертежи возможных вариантов компоновки, в котором все подшипниковые узлы имеют идентичную конструкцию, основанную на использовании фланцевых втулок (стаканов), установленных на одной или двух платах, скрепленных распорными стойками и винтами. Чаще применяются конструкции, у которых оси валиков передачи расположены перпендикулярно к платам (рис.12). В конструкциях с расположением платы параллельно осям валиков подшипники крепятся в стойках или кронштейнах (рис.13). Втулки, стойки, кронштейны и платы обычно являются оригинальными деталями, конфигурация и размеры которых выбираются из конструктивных соображений в каждом конкретном случае. 6. Содержание отчета по заданию и указания по его оформлению Для защиты задания студенты представляют следующие документы: 1. пояснительную записку; 2. схему и эскизную компоновку передачи, выполненные на миллиметровой бумаге формата А3; 3. спецификацию передачи, выполненную на стандартном бланке с указанием материалов оригинальных деталей в графе «примечания»; 4. сборочный чертеж передачи, выполненный на листе формата А3. Все документы должны быть скреплены в один отчет. Пояснительная записка должна содержать: числовые значения исходных данных, расчетные формулы в буквенном обозначении, числовые значения параметров и результаты расчетов; краткие замечания о принятых величинах и вариантах; порядок сборки и регулировки; ссылки на номера формул и таблиц данных указаний или другой литературы. 24 7. Контрольные вопросы 1. Укажите на рисунке зацепления зубчатых колес названия всех окружностей. 2. Что такое модуль зацепления? 3. Что такое передаточное число и передаточное отношение зубчатой передачи? 4.Перечислите методы нарезания зубчатых колес. 5. Что такое подрезание зубьев, когда оно возникает, как избежать подрезания? 6. Как производится выбор и определение числа зубьев колес зубчатых передач? 7. Какие факторы влияют на прочность зубьев? 8. Почему на заводах ограничивают применение стандартных модулей? 9. Как определяются диаметры делительных окружностей? 10. Как определить коэффициент смещения рейки из условия отсутствия подрезания? 11. Какие схемы расположения опор и зубчатых колес Вам известны? 12. Что определяет выбор размера вала? 13. Что влияет на выбор типа и размера шарикоподшипника? 14. Какое действие оказывают силы в зацеплении на валы и опоры? 15. Какие требования необходимо указывать на посадочные и присоединительные места под шарикоподшипники? 16. Как выбираются посадки сопряженных деталей? 25 Приложение А Пример выполнения работы Спроектировать цилиндрическую зубчатую передачу с двухсторонним расположением опор. Исходные данные: 1) передаточное отношение i12=4,8; 2) число зубьев шестерни z1=15; 3) угол наклона зубьев =10о 4) момент сопротивления на валу колеса МН=120Н∙см.; 5) допустимое значение упругого мертвого хода[м]2=108∙10-4 рад. 1. Геометрический расчет зубчатой передачи 1.1 Расчет числа зубьев колеса i12=z2/z1 z2=i12∙z1=4,8∙15=72 1.2 Выбор материалов колес Для шестерни z1=15 принимаем сталь 50 ГОСТ 1050-84; для которой (см.табл.4) допускаемое напряжение изгиба []и1=120н/мм2; Для колеса z2=72 принимаем сталь 45 ГОСТ 1050-74; для которой []и2=115н/мм2; 1.3 Расчет эквивалентных чисел зубьев и определение коэффициента прочности зуба По табл.3 для цилиндрической косозубой передачи Zэ Z э1 Z cos3 Z1 Z2 15 72 15.7 ; Z э 2 75.4 3 3 o 3 cos cos 10 cos cos 3 10o 26 По табл.2. для шестерни Zэ1=15.7Yf1=4.47 для колеса Zэ2=75.4Yf2=3.7 1.4 Выбор коэффициентов смещения Т.к. условие отсутствия заклинивания z1+z2˃2∙17 выполняется (15+72˃34) выбираем равносмещенное зацепление. Из условия отсутствия подрезания шестерни Z1=15 X1 17 15, 7 0, 076; X 2 0, 076 17 1.5 Определение коэффициента длины зуба По табл. 5 рекомендуется m=1025; принимаем m=12 1.6 Расчет модуля Расчет модуля ведется для колеса, имеющего большее значение отношения f [ ]и f1 [ ]и1 f2 [ ]и 2 4, 47 0, 037 120 3, 7 0, 032 115 т.е. для колеса Z1=15, для которого крутящий момент M1 M н 120 25н см i12 4,8 По табл.1 для цилиндрической передачи mn 1, 4 3 M1 K Kv f 1 [ ]и1 m Z1 K n 1, 4 3 250 11 4, 47 0, 47 120 12 15 1,35 27 По СТ СЭВ310-76 принимаем mn=0,5мм. 1.7 Расчет размеров зубчатых колес (см.табл.5). 1.7.1. Торцевой модуль mt mn 0,5 0,508 мм cos cos10o 1.7.2. Диаметры делительных окружностей di mt zi d1=15∙0,508=7,62мм d2=72∙0,508=36,58мм 1.7.3. Длина зуба be=m∙mn=12∙0,5=6,0мм 1.7.4. Радиальный зазор зубчатой передачи С=С*∙mn C=0,5∙0,5=0,25 1.7.5. Высота делительной головки зуба ha (ha* xi ) mn ha1=(1 + 0,076)∙0,5=0,538мм ha2=(1 – 0,076)∙0,5=0,462мм 1.7.6. Высота делительной ножки зуба h f (h*a c* xi ) mn h f 1 (1 0,5 0, 076) 0,5 0, 712 мм h f 2 (1 0,5 0, 076) 0,5 0, 788 мм 1.7.7. Высота зуба 28 h=ha+hf h=0,538+0,712=1,25мм 1.7.8. Диаметры окружностей выступов dai=di+2hai da1=7,62+2∙0,538=8,6968,7мм da2=36,58+2∙0,462=37,50437,5мм 1.7.9. Диаметры окружностей впадин dfi=di-2hfi df1=7,62-2∙0,712=6,2мм dfi=36,58-2∙0,788=35,0мм 1.7.10. Межосевое расстояние aw=0,5(d1+d2) aw=0,5(7,62+36,58)=22,1мм 1.7.11. Ширина венца b=be∙cos=6∙cos10o=5,8мм 2. Расчет и конструирование валиков и опор 2.1. Проектный расчет валиков и опор 2.1.1. Проектный расчет диаметра валиков dmin (7,2 8,5) 4 M k dmin1 = (7,2 8,5) 4 0, 25 5 6,1 мм dmin2 = (7,2 8,5) 4 1, 2 7,5 8,9 мм 2.1.2. Выбор материалов валиков Для валиков приборных передач рекомендуются стали 35, 40 и 45 по ГОСТ 1050-84. 29 2.1.3. Выбор типа подшипников Согласно 2 стр. 178; табл. 67 для первого валика принимаем шарикоподшипник 1006095 для второго валика принимаем шарикоподшипник 1006098 Таблица. 10 Тип d, D, b, [Q], подшипника мм. мм. мм. Н. 1006095 5 13 4 340 1006098 8 19 6 880 2.1.4. Выбор смазки для подшипников Для смазки подшипников принимаем ЦИАТИМ-201 ГОСТ 6267-74 2.2. Разработка эскизного проекта Эскизная разработка конструкции передачи проводится на миллиметровке в масштабе 1:1. При этом возможен следующий порядок компоновки узла передачи (см. рис. 14). Изображают зубчатую пару в соответствии с ранее найденными размерами. Наносят контуры валов и опор. Показывают крепление колес с валами (для колеса Z2=72, выполненного раздельно с валом). Если для установки подшипников применены стаканы (фланцевые втулки), то предварительно на эскизе изображают стаканы, а затем уже наносят контуры плат с распорными стойками. Разумеется, что предложенная схема компоновки условна, и в зависимости от конкретных условий может меняться. После разработки основных элементов передачи на чертеж наносятся размеры, необходимые для выполнения дальнейших расчетов. 2.3. Проверочный расчет валиков 2.3.1. Определение сил, действующих в зацеплении (см. рис. 15 и табл. 8) Окружное усилие Ft M2 1200 65, 6 Н 0,5 d 2 0,5 36,58 Осевое усилие Fx Ft tg 65, 6 tg10o 11, 6 Н Радиальное усилие tg tg 20o Fr Ft 65,6 24, 2 Н cos cos10o 30 Сила нормального давления Fn Ft 1 1 65.6 70.9 Н o cos cos cos 20 cos10 o 2.3.2. Определение опорных реакций (см. рис. 15) Значение опорных реакций в вертикальной плоскости R в11 R в 21 Fr12 l2 Fx 21 r1 24, 2 8 11, 6 3,81 6, 2 Н l2 l3 8 16 Fr12 l3 Fx 21 r1 24, 2 16 11, 6 3,81 18 Н l2 l3 8 16 R в12 Fr12 l3 Fx12 r2 24, 2 9 11, 6 18, 29 16,5 Н l2 l3 9 17 Rв 22 Fr12 l2 Fx12 r2 24, 2 17 11, 6 18, 29 7, 7 Н l2 l3 9 17 Значение опорных реакций в горизонтальной плоскости R Г 11 Ft 21 l2 65, 6 8 21,9 Н l2 l3 8 16 R Г 21 Ft 21 l3 65, 6 16 43, 7 Н l2 l3 8 16 R Г 12 Ft12 l3 65, 6 9 22, 7 Н l2 l3 9 17 Ft12 l2 65, 6 17 42,9 Н l2 l3 9 17 Значение полных реакций R Г 22 R11 ( R1в1 )2 ( R1Г 1 )2 (6, 2)2 (21,9)2 22,8 Н R21 ( R1в 2 )2 ( R1Г 2 )2 (18)2 (43,7)2 47,3 Н 31 32 R12 ( R2в1 )2 ( R2 Г1 )2 (16,5)2 (22,7)2 28,1 Н R22 ( R2в 2 )2 ( R2 Г 2 )2 (7,7)2 (42,9) 2 43,6 Н 2.3.3. Определение значений изгибающих моментов на валиках в их опасных сечениях Значения изгибающих моментов на первом валике а) в вертикальной плоскости изгибающий момент в сечении С будет: M в изг1 R в 21 l 2 18 8 144 Н∙мм, рассматривая силы справа и M визг1 R в11 l3 6, 2 16 99, 2 Н∙мм, рассматривая силы слева. Скачок момента в сечении С равный 44.8Н∙мм вызван дейтвием момента от силы Fx 21 . б) в горизонтальной плоскости изгибающий момент для этого сечения составит: M Г изг1 R Г 11 l3 21,9 16 350, 4 Н∙мм Тогда суммарный изгибающий момент, как видно из эпюры, будет иметь место в точке С и его величина будет: M изг1 (M изг1в )2 (M изг1Г )2 (144)2 (350, 4)2 378,8 Н∙мм. Значения изгибающих моментов на втором валике. а) в вертикальной плоскости изгибающий момент в сечении С' будет: M в изг 2 R в12 l2 16,5 17 280,5 Н∙мм, рассматривая силы слева и M визг 2 R в 2 2 l3 7, 7 9 69,3 Н∙мм, рассматривая силы справа. 33 34 б) в горизонтальной плоскости изгибающий момент для этого сечения составит: M Г изг 2 R Г 12 l2 22, 7 17 385,9 Н∙мм Тогда суммарный изгибающий момент для сечения С' будет: M изг 2 (M изг 2в )2 (M изг 2 Г )2 (280,5)2 (385,9)2 477 Н∙мм 2.3.4. Расчет эквивалентных напряжений для опасных сечений Расчёт эквивалентного момента в опасном сечении на первом валике: М ЭКВ1 М М М ЭКВ2 М М 2 Изг1 2 Кр1 2 Изг2 378,82 2502 453,9 Н∙мм, 2 Кр2 477 2 12002 1291,3 Н∙мм. Расчет эквивалентных напряжений для опасных сечений: M экв1 453,9 экв1 36,3 Н/мм2 3 0,1 d min1 0,1 53 экв 2 M экв 2 1291,3 25, 2 Н/мм2 3 0,1 d min 2 0,1 83 По табл. 4 для стали 35 значение []и=100Н/мм2. При условии экв < []и, прочность валика обеспечена. 2.4. Оценка долговечности подшипников Значения эквивалентной статической нагрузки для первого валика: PO1 x0 Rr1 y0 Rx1 0,6 47,3 0,5 11,6 34,12 Н PO1 Rr1 47,3 Н Т.к. PO1 PO1 , то принимаем PO1 47,3 Н Значения эквивалентной статической нагрузки для второго валика: PO2 x0 Rr 2 y0 Rx 2 0,6 43,6 0,5 11,6 32 Н PO2 Rr 2 43,6 Н 35 Т.к. PO2 PO 2 , то принимаем PO 2 43, 6 Н Значение расчетной статической грузоподьемности для первого валика: Cop1 K б PO1 3 47,3 141,9 Н Значение расчетной статической грузоподьемности для второго валика: Cop 2 K б PO 2 3 43, 6 130,8 Н Т.к. Сор1 < [Q1] и Сор2 < [Q2] (см. табл. 15), долговечность подшипников обеспечена. 3. Крепление колес на валиках Колесо 1 выполняется заодно с первым валиком, т.к. dmin1=5мм, а df1=6,2мм Колесо 2 закреплено со вторым валиком штифтом. Диаметр штифта выбирается по зависимости: dш 0, 2 0, 25 dв При dв 12 мм принимаем dш 0, 2 12 2, 4 мм Проверочный расчет штифта выполняется по формуле ср ср 4 Mк ср ; d 2ш dв 4 1200 20, 4 Н/мм2. 3,14 2,52 12 Т.к. для стальных штифтов [ ]ср 50 70 H/мм2, то условие прочности штифта выполнено. 36 Приложение Б. Варианты заданий 1 Z1 вдщ . Мн вдм . 2 Z2 № варианта 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 i12 4 8 6 7 4 8 5 4 6 8 7 8 6 8 7.5 0 Z1 18 16 14 18 16 14 18 16 20 14 16 17 14 13 14 0 10 0 12 8 0 15 0 15 12 8 0 15 0 8 37 Mн, н∙см 108.0 112.6 102.0 88.0 67.2 112.2 77.8 99.6 144.0 77.2 111.2 84.6 102.0 122.0 114.2 []2∙10-4 рад 12.2 13.0 9.06 7.4 6.6 11.5 9.6 8.2 11.2 6.4 10.4 9.2 10.0 10.8 11.2 1 Z1 вдщ . Мн вдм . 2 Z2 № варианта i12 Z1 0 Mн,н∙см 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 5 4,5 5 8 6 4 4 8 5 8 6 4 5 5 6 14 16 20 16 14 20 18 14 16 14 17 20 16 18 20 10 0 12 8 0 15 0 12 0 0 10 0 15 10 0 261,0 109,5 112,4 86,2 17,2 69,6 121,0 118,4 123,2 106,0 36,7 49,5 108,4 23,2 84,8 38 []2∙10-4 рад 102,8 85,0 10,5 16,2 76,0 44,8 64,4 105,0 92,0 80,0 60,0 100,0 104,0 34,0 64,4 1 Z1 вдщ 2 . Z2 2 № варианта i12 Z1 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 5 4 6.5 4 8 6 7 4 6.5 8 4 6 5 7 4.8 14 16 16 20 16 14 18 20 16 14 16 18 20 14 16 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 0 39 2 Mн,н∙см 136.8 104.2 158.2 105.2 96.2 114.0 83.2 96.4 57.0 146.0 162.0 88.4 104 97.2 46.2 []2∙10-4 рад 80.0 96.0 121.0 102.0 84.0 72.0 104.0 112.0 96.0 122.0 132.0 74.0 116.0 96.0 112.0 1 Z1 вдм. Мн 2 Z2 № варианта i12 Z1 q Mн,н∙см 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 35 20 40 18 26 15 12 45 48 36 18 30 36.8 22 27.2 1 3 1 2 2 3 4 1 1 1 3 1 1 2 2 16 10 20 8 10 8 6.3 20 25 20 10 16 12.5 10 12.5 240.0 188.4 114.0 146.0 216.8 115.0 96.8 104.0 210.2 96.4 97.2 120.0 158.2 136.8 105.2 40 []2∙10-4 рад 13.8 12.0 12.0 14.5 21.0 11.2 11.6 9.6 19.4 9.6 11.2 12.2 13.2 15.6 11.5 Приложение В (рекомендуемое). Библиография 1. Первицкий Ю.Д. Расчет и конструирование точных механизмов. Учебное пособие для вузов. Изд.2-е. доп. и перераб. Л.-"Машиностроение", 1976. 2. А.К. Плюснин, В.И. Ердаков, Л.Г. Пин. Проектирование механических передач приборов. Изд. "Высшая школа" М.-1967. 3. Р.Д. Бейзельман (и др.). Подшипники качения. Справочник. Изд. 6-е, перераб. и доп. М.,"Машиностроение", 1975. 4. И.Я. Левин. Справочник конструктора точных приборов. М.,"Машиностроение", 1967. 5. Ф.С. Дмитриев. Проектирование редукторов точных приборов. Л. "Машиностроение", 1971. 6. Д.Д. Чурабо. Детали и узлы приборов. М., "Машиностроение", 1975. 7. Е.А Вопилкин. Расчет и конструирование механизмов приборов и систем. М., "Высшая школа", 1980. 8. О.Ф. Тищенко. Элементы приборных устройств (в двух частях). М., "Высшая школа", 1982. 9. Е.Я. Красковский. Расчет и конструирование механизмов приборов и вычислительных систем. М., "Высшая школа", 1983. 41