")
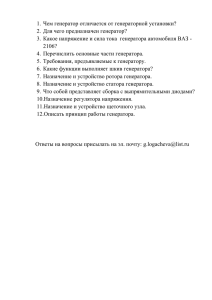
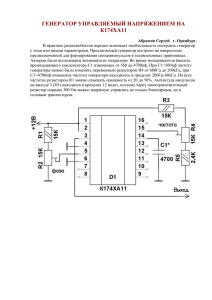
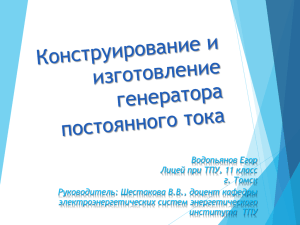
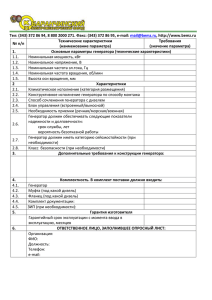
Министерство транспорта и коммуникаций Республики Беларусь УО «Белорусская государственная академия авиации» Факультет гражданской авиации Кафедра технической эксплуатации авиационного и радиоэлектронного оборудования Специальность 1-37 04 02 «Техническая эксплуатация авиационного оборудования». КУРСОВОЙ ПРОЕКТ ____________________________________________________ наименование темы курсового проекта ____________________________________________________ курсанта___________ курса факультета______________________ наименование. факультета ________________________________________________________ фамилия, имя, отчество курсанта Научный руководитель _________________________ ______________ _________________ должность, уч. степень, уч. звание подпись, дата инициалы, фамилия Зав. кафедрой _________________________ уч. степень, уч. звание ______________ подпись, дата _________________ инициалы, фамилия Минск ______ год ОГЛАВЛЕНИЕ ВВЕДЕНИЕ .................................................................................................................. 3 ГЛАВА 1. ОБЗОР ЛИТЕРАТУРНЫХ ИСТОЧНИКОВ ПО ТЕМЕ КУРСОВОГО ПРОЕКТА..................................................................................................................... 6 1.1 Анализ существующих систем регулирования........................................ 6 1.2 Выбор типа генератора для моделирования ............................................ 8 1.3 Принцип работы систем управления напряжения................................... 9 ГЛАВА 2. ИМИТАЦИАОННАЯ МОДЕЛЬ АВИАЦИОННОГО ГЕНЕРАТОРА ..................................................................................................................................... 12 2.1 Математическая модель синхронного бесконтактного генератора в среде MATLAB ........................................................................................................... 12 2.2 Имитационная модель синхронного генератора типа ГТ в среде Matlab & Simulink ................................................................................................................... 17 ГЛАВА 3. РАЗРАБОТКА ИМИТАЦИОННОЙ МОДЕЛИ АВИАЦИОННОГО ГЕНЕРАТОРА С СОВРЕМЕННОЙ СИСТЕМОЙ РЕГУЛИРОВАНИЯ ............. 21 3.1 Разработка имитационной модели системы регулирования напряжения с потребителями в Matlab & Simulink ................................................ 21 3.2 Современная интеллектуальная система регулирования авиационного синхронного генератора на основе нечеткой логики ............................................ 25 ГЛАВА 4. СИСТЕМА РЕГУЛИРОВАНИЯ АВИАЦИОННОГО СИНХРОННОГО ГЕНЕРАТОРА НА ОСНОВЕ ПИД - РЕГУЛЯТОРА ............. 32 4.1 Анализ методов расчета ПИД-регулятора авиационного синхронного генератора .................................................................................................................. 32 4.2 Адаптивный ПИД-регулятор авиационного синхронного генератора 41 ЗАКЛЮЧЕНИЕ ......................................................................................................... 47 СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ ................................................. 49 2 ВВЕДЕНИЕ Перспективными самолетами, по мнению специалистов, считаются самолеты концепции «All electric aircraft» (Полностью электрический самолет) [1], [2], [3]. Свое начало концепция полностью электрических воздушных судов берет еще с конца 1970-х годов. Желание создать самолет, использующий электрическую энергию как основную появилось в результате исследований по программе энергетически эффективного самолета (рисунок 1). Рисунок 1 – Основные системы полностью электрических воздушных судов Программа совместно с модернизациями аэродинамики, силовой установки и конструкции летательного аппарата предполагала за счет устранения забора воздуха от авиационного двигателя, внедрения электродистанционных систем управления полетом, создания единой электрической системы, улучшить летно-технических характеристик воздушного судна [4], [5]. По мнению специалистов проводивших исследования и испытания были выделены следующие преимущества перехода только на электрическую энергию в место всех видов энергии применяемых на летательном аппарате (пневмо-, гидро- и др.): повышение его технических характеристик, снижение массы авиационного двигателя и воздушного судна в целом (путем ликвидации 3 значительного количества трубопроводов и тд.), увеличение дальности полета (путем использования гибридных двигателей и высокотехнологичных литийионных аккумуляторных батарей), уменьшение производимого уровня шума авиационных двигателей, минимизирование потребления топлива и т.д. [5], [6]. Потребители электрической энергии, установленные на воздушных судах чувствительны к изменению напряжения бортовой сети, которое вырабатывается самолетным генератором и должно изменяться в малых диапазонах на всех этапах полета. Чтобы реализовать заданное требование и стабилизировать выходное напряжение генератора, все авиационные синхронные генераторы используют вместе с регуляторами напряжения. Главные подходы к решению этих вопросов, применительно к проектированию автономных систем электроснабжения изложены в [5], [7]. Реализовать эти подходы можно введением в системы электроснабжения, бортовых цифровых вычислительных машин, реализующих оптимальные и интеллектуальные законы регулирования напряжения. Вопрос о системах регулирования напряжения нового типа возник потому, что существующие современные системы регулирования напряжения данного назначения, морально устарели и не отвечают требованиям безопасности для большинства воздушных судов [7], [8]. В настоящее время, широкое применение нашли аналоговые регуляторы реализующие пропорционально-интегрально-дифференцирующий (ПИД) закон управления. Такие регуляторы, используют принцип управления по отклику и на сегодняшний день, если не достигли, то уже значительно приблизились по таким показателям как точность и быстродействие к своим предельным возможностям. Исходя из этого, дальнейшая модернизация системы управления возможно только при переходе на новые принципы регулирования и схемные решения, что может усложнить процесс как производства, так и настройки параметров регулятора. Таким образом в последнее время ведутся работы по разработке и исследованию систем управления на основе цифровых ПИДрегуляторов и интеллектуальных систем регулирования. Поэтому дальнейшее совершенствование систем управления напряжения связано с повышением качества электроэнергии, повышением КПД приемников электроэнергии и может быть реализовано введением в контур управления гибких законов управления и цифровой техники. Под качеством электроэнергии, согласно ГОСТ Р 54073−2017 и ГОСТ 21558-2000, понимаются следующие показатели: величина перерегулирования, время регулирования, статическая ошибка регулирования [9], [10]. 4 Таким образом, объектом исследования является система регулирования напряжения авиационного синхронного генератора, а предметом исследования – современные законы регулирования напряжения авиационного генератора. Целью курсового проекта является разработка имитационной модели системы регулирования напряжения авиационного бесконтактного синхронного генератора в среде Matlab при действии возмущений по цепям управления и нагрузки. В дальнейшем предполагается использовать достигнутые результаты курсового проекта в учебном процессе в качестве материала для методических рекомендаций. Для достижения цели необходимо решить следующие задачи: 1. Разработать и построить имитационную модель системы регулирования напряжения авиационного бесконтактного синхронного генератора в среде Matlab при действии возмущений по цепям управления и нагрузки; 2. Исследовать эффективность работы системы регулирования напряжения с использованием современных методов управления на основе ПИД- регуляторов. 3. Разработать методические указания к лабораторным занятиям по тематике «Исследование ПИД-регуляторов» Опыт эксплуатации воздушных судов показал, что электрическая энергия обладает значительными преимуществами перед другими видами энергии с точки зрения универсальности, надежности, удобства эксплуатации и унификации оборудования. При этом существенным является то, что электрическая энергия облегчает процесс автоматизации оборудования самолетов, а полная комплексная автоматизация на воздушных судах возможна лишь в том случае, если управление ими частично или полностью электрифицировано. В результате были созданы самолеты с повышенным уровнем электрификации: пассажирские – Аirbus A380 (для управления предкрылками и стабилизатором установлены электромеханические приводы) и Boeing 787 Dreamliner (спойлеры и тормоза шасси управляются через электромеханические приводы), истребитель F-35 (в системе управления полетом используются только электрогидростатические рулевые приводы) и др., на которых реализованы многие положения концепции полностью электрических самолетов [1], [2], [3]. 5 ГЛАВА 1 ОБЗОР ЛИТЕРАТУРНЫХ ИСТОЧНИКОВ ПО ТЕМЕ КУРСОВОГО ПРОЕКТА 1.1 Анализ существующих систем регулирования Вопрос о системах регулирования нового типа актуален потому, что существующие современные системы регулирования напряжения, реализованные на базе известных (традиционных) устройств, не могут соответствовать требованиям, которые постоянно растут. Практическая неизменность их свойств за последние десятилетия (при острой необходимости в улучшении свойств), а также незначительные результаты известных попыток оптимизации традиционных устройств систем по критериям минимума объема, массы или эффективности является этому свидетельством [7], [8]. Воздушные суда нового поколения «All electric aircraft», как показали исследования требуют повышения мощности систем электроснабжения приблизительно в 1.5-2 раза, что влечет к проектированию новых (относительно традиционных) источников электрической энергии. Мощность, которую выдает один генератор может достигать до 300 кВ*А, в зависимости от типа самолета (в настоящее время на самолетах не превышает 250 кВ*А). На данный момент (рисунок 1.1) самолет Boeing 787 Dreamliner с повышенным уровнем электрификации уже использует четыре основных генератора переменного тока мощность которых превышает 200 кВ*А (250 кВ*А каждый). Они приводятся во вращение от авиадвигателей. На данном самолете также установлены на вспомогательной силовой установке два генератора мощностью 225 кВ*А. В результате, суммарная возможная мощность, выдаваемая генераторами потребителям на этом самолете - 1450 кВ*А. Мощность одного генератора на воздушном судне Аirbus A380 - 150 кВ*А, а общая мощность установленной системы электрического снабжения достигает 840 кВ*А. Поскольку мощность энергосистемы значительно увеличивается остро встает вопрос обеспечения норм качества электроэнергии [6]. Качество электроэнергии, как известно, оказывает существенное влияние на надежность, эффективность функционирования и массо-габаритные показатели бортовых приемников электрической энергии. Этим объясняется пристальное внимание, уделяемое совершенствованию систем управления напряжения синхронных генераторов воздушных судов. 6 Рисунок 1.1 – Мощность систем электроснабжения воздушных судов При обосновании требований к перспективным цифровым системам управления электрической энергии необходимо принять во внимание некоторые специфические моменты, которые характерны при работе данных систем. Исследование процессов интеллектуального управления напряжением синхронного генератора представляет значительный интерес с точки зрения оценки предельных возможностей повышения качества электрической энергии при неизменных характеристиках синхронных генераторов. С целью обеспечения надежности питания потребителей электрической энергией, ее стабильностью и т.д. на борту воздушных судов применяются совместно с генераторами регуляторы напряжения, которые указаны в литературе [10]. Характеристики параметров регулятора напряжения зависят от выбора закона, реализуемого в них [11], [12], [13]. Таким образом, повышение количества оборудования на воздушном судне использующего только электроэнергию позволит обеспечить достижения наилучших характеристик аэродинамики летательного аппарата, снизить массу авиационного двигателя и воздушного судна в целом, увеличить дальности полета, минимизировать потребление топлива, увеличить мощность и повысить качество электрической энергии генераторов [3], [5], [6], [7]. 7 1.2 Выбор типа генератора для моделирования Генераторы переменного тока в настоящее время, одни из самых распространенных главных источников электрической энергии, расположенных на борту воздушных судов. В авиации наибольшее применение нашли трехфазные бесконтактные синхронные генераторы переменного тока с независимым возбуждением от бортовой системы электроснабжения (при мощности 7,5-30кВА) и с возбуждением от специального возбудителя (при мощности более 30кВА). Независимое возбуждения от бортовой системы электроснабжения имеет главных недостатков, такой как высокие требования к качеству источника постоянного тока, что влечет увеличение потребления электрической энергии на управление выходной мощности, следовательно, увеличение массогабаритных характеристик регулятора, т.к. управляются серьезные токи возбуждения. Этих недостатков лишена системы возбуждения от специального возбудителя, что обусловлено независимостью от других источников электрической энергии [14], [15], [16] К преимуществам бесконтактных бесщеточных генераторов можно отнести гарантированное качество электроэнергии, высокий коэффициент полезного действия системы, отсутствие ограничений по частоте вращения генератора, также бесконтактный бесщеточный генератор имеет хорошие регулировочные свойства. В последнее время все более широкое распространение начинают находить бесконтактные бесщеточные генераторы (ГТ30ПЧ8, ГТ40ПЧ8, ГТ60ПЧ8, ГТ120ПЧ6, СГК-11/1,5КИС) производства АО «Электромашиностроительный завод «ЛЕПСЕ» и АО «Сарапульский электрогенераторный завод». Генераторы производства «Лепсе» и «СЭГЗ» устанавливаются на самолеты и вертолеты российского производства, как гражданского назначения, так и военного (МиГ-25, Ил-76, Ту-154, Ту-22М, Ил96/300, Ми-8, Ми-26, Ка-32) [17], [18]. Таким образом, на основе данных таблицы 1.1 и имеющегося опыта работы, оптимальным будет выбрать генератор типа ГТ40ПЧ8Б, так как он используется на выпускаемых типах воздушных судов, имеет средние значения по всем показателям и относительно не высокую массу. Таблица 1.1 – Основные характеристики авиационных генераторов Производитель Параметры АО «Электромашиностроительный завод «ЛЕПСЕ», Россия АО «Сарапульский электрогенераторный завод», Россия 8 ГТ120ПЧ6 СГК- ГТ30ПЧ8 ГТ40ПЧ8Б ГТ60ПЧ8А А, АБ 11/1.5КИС М Б (В) ТВ Напряжение линейное, В 208 120 208 208 208 Рабочая частота, Гц 380-420 400 400 400 400 Мощность, кВА 120 16 30 40 60 Ток нагрузки, А 250-333 44,5 83,3 111 167 Частота вращения, об/мин 5700-6300 8000 8000 8000 8000 Масса, кг 67,5 36 21 31 60 Габаритные размеры, DxL, мм 324х410 236х448,5 309,5х 426х345х Ø270 257 492х400х32 0 Ту-154, Ил-76, Ил-96/300 Ка-32, Ми-8 Тип генератора Эксплуатируется на данном типе ВС Ми-26 МиГ-25 Ту-22М 1.3 Принцип работы систем управления напряжения Потребители электрической энергии, установленные на воздушных судах чувствительны к изменению напряжения бортовой сети, которое вырабатывается самолетным генератором и должно изменяться в малых диапазонах на всех этапах полета. Чтобы реализовать заданное требование и стабилизировать выходное напряжение генератора, все авиационные синхронные генераторы используют вместе с регуляторами напряжения (рисунок 1.2) [19], [20], [21]. Рисунок 1.2 – Система управления напряжения 9 В авиации на практике нашел применение лишь метод регулирования напряжения путем изменения магнитного потока электрической машины. Величина потока Фв определяется величиной сопротивления магнитной цепи машины Rмагн и тока в обмотке возбуждения Iв, который зависит от напряжения на обмотке возбуждения Uв и сопротивления цепи возбуждения [19], [20], [21]. Изменение величины тока в обмотке возбуждения Iв достигается повышением или понижением величины сопротивления цепи обмотки возбуждения. Задачу управления сопротивлением в цепи обмотки возбуждения, реализуют полупроводниковые приборы [19], [20], [21], [22]. Можно выделить основные компоненты (рисунок 1.3), которые входят в том или ином виде в структурную схему всех видов регуляторов напряжения [22], [23]: измерительный орган (ИО), который формирует сигнал ΔU, соответствующий разнице между текущим значением напряжения U и заданным Uзад. (именуемым как эталонный); усилитель (У), который увеличивает сигнал ΔU на определенную величину К; исполнительный орган (ИСП), в соответствии с полученным сигналом от усилителя, формирует управляющий сигнал изменения тока в обмотке возбуждения Iв, что приводит с течением времени к достижению выходного напряжения генератора требуемых значений; устройство обратной связи (ОС), уменьшает величину управляющего сигнала изменения тока в обмотке возбуждения Iв, тем самым система совершает меньше паразитных колебаний (дрейф нуля), достигается плавный выход в рабочий режим. 10 АД U G Преобразователь энергии ОВ Iв Исп. K △U У △U = Uзад - U ИО ОС UЗАД Регулятор напряжения Рисунок 1.3 – Структурная схема системы регулирования напряжения Регулятор напряжения по своему характеру схож с работой традиционного реле (работая в режиме переключения) и является наиболее важным узлом системы электрического обеспечения на борту воздушного судна. От работы данного узла зависит качество, надежность электрической энергии и т.д., достигается минимизирование потерь в полупроводниковом приборе, повышается мощность в цепи возбуждения генератора с сохранением высокого коэффициенте полезного действия. Таким образом использование регулятора напряжения в авиационных синхронных генераторах, способствует их адаптивности к варьированию параметров, а также не чувствительности к изменению температуры окружающей среды [24], [25]. 11 ГЛАВА 2 МАТЕМАТИЧЕСКАЯ МОДЕЛЬ АВИАЦИОННОГО ГЕНЕРАТОРА 2.1 Математическая модель синхронного бесконтактного генератора в среде MATLAB Переходные процессы в авиационном бесконтактном трехфазном синхронном генераторе переменного тока ГТ40ПЧ8Б описаны с помощью уравнениями Парка-Горева в ортогональных осях d, q с общепринятыми допущениями (пренебрежение участием высших гармоник в образовании электромагнитного момента; магнитопровод и обмотки машины симметричны; в продольной и поперечной осях существуют единые потоки взаимной индукции, пронизывающие все контура) [24], [25], [26], [27] [28]: U d id R ωψ q U q iq R ωψ d U f if Rf U вв dψ f dt dU f 1 U R L f вв вв kвв dt ψ q iq Lq 1 E ω 1 ψ f i f Lsf E kf ω ψ d id Lsd 2 E kн ωLad i f iq 3k f (2.1) Пренебрегая потоками рассеяния обмотки возбуждения генератора и решая систему уравнений (2.1) совместно с уравнениями нагрузки: 12 (2.2) U dн id Rн iq ωLн U qн id ωLн iq Rн U н 0,5 U d2н U q2н получим дифференциальное уравнение движение объекта под действием управления: Tв Т вв d 2 U н dt 2 Tв Т вв генератора, описывающее d U н U н kг kвв u, dt (2.3) где U н U н U эт ‒ отклонение напряжения генератора от эталонного значения; 0,66 kн Lad Tв 2 k f R f 1 kн kd ω Lad ‒ постоянная времени обмотки возбуждения генератора при замкнутой цепи статора; Tвв Lвв / Rвв ‒ постоянная времени обмотки возбуждения возбудителя; kг kd 0,66 kн ω Lad ‒ коэффициент усиления генератора; Rf k f ω Lq Lн R Rн 2 ω2 Lq Lн Lsd Lн ‒ коэффициент, зависящий от параметров генератора и нагрузки. Анализ результатов моделирования статических режимов синхронных генераторов показывает, что внешние характеристики, полученные при моделировании с использованием паспортных данных, существенно отличаются от экспериментальной внешней характеристики (рисунки 2.1, 2.2) [28]. Анализ графиков показывает, что погрешности моделирования (превышение напряжения при cosφ = 1) для I =Iн составляет 25 %, а для I = 2Iн – 65 %. 13 Рисунок 2.1 – Внешние характеристики генератора при соотношении x сопротивлений d 2, 0 xq Рисунок 2.2 – Внешние характеристики генератора при соотношении x сопротивлений d 5,0 xq Условие максимума напряжения dU φ dRн 0 соответствует условию xd xq Rн2 , что всегда выполняется для рассматриваемой модели с учетом допущений xd = const для I (1,5 2,5) I н , R 0, xq const. 14 На графиках внешних характеристик (рисунок 2.2), в отличие от максимумов напряжений (рисунок 2.1), имеются максимумы тока нагрузки, что не соответствует экспериментальным данным при cosφ = 1. Условия максимума тока dI φ dRн 0 выполняются лишь при условии xq ( xd 2 xq ) ( R Rн ) 2 только в случае явнополюсных генераторов с неравномерным воздушным зазором xd 2 4. xq Для неявнополюсных синхронных генераторов (xd = xq) и x явнополюсных генераторов с равномерным воздушным зазором d 1,7 1,9 xq это условие не выполняется (рисунок 2.1). Внешние характеристики при cosφ = 0,8, хотя и не имеют максимумов напряжения и тока, но также не соответствуют экспериментальным зависимостям. Так, на рисунке 2.1 внешняя характеристика располагается ниже экспериментальной, получаемой при cosφ = 1. Оценка влияния вышеуказанных факторов на характеристики генератора проводилась путем сравнения данных натурных испытаний и аналогичных данных, полученных путем имитационного моделирования для полной математической модели и моделей более низкого уровня (без влияния трансформаторных ЭДС и демпферных контуров). Моделирование проводилось в среде Matlab при коммутациях нагрузки от 0 до 160 % от номинальной мощности генератора и при частоте вращения вала генератора 8000 об/мин. На рисунке 2.3 сплошной линией показаны результаты натурного эксперимента. Анализ результатов моделирования динамических режимов синхронного генератора (рисунок 2.3) показывает, что учет демпферных контуров по обеим осям в уравнениях математической модели генератора оказывает незначительное влияние на протекание переходных электромагнитных процессов лишь на интервале времени, близком к моменту изменения сигналов управления и токов нагрузки. При этом снижаются величины перерегулирований напряжения генератора приблизительно на 1,3– 2,0 % по сравнению с натурным экспериментом. 15 Рисунок 2.3 – Моделирование динамических режимов синхронного генератора Анализ кривых изменения выходного напряжения генератора при имитационном моделировании с учетом и без учета влияния трансформаторных ЭДС в математической модели генератора показывает, что качественно процессы протекают аналогично (рисунок 2.3). Однако, при учете трансформаторных ЭДС имеют место большие отклонения напряжения при действии возмущений (коммутация токов нагрузки) и изменении сигнала управления: величины отклонений напряжения генератора увеличены на 6– 12 % по сравнению с натурным экспериментом. При пренебрежении влиянием трансформаторных ЭДС величины отклонений напряжения генератора в моменты действия возмущений и изменения управляющих воздействий занижены на 8–14 % по сравнению с экспериментальными кривыми. Помимо этого, при неучете трансформаторных ЭДС время переходного процесса увеличивается на 15–30 % в зависимости от величины коммутации нагрузки и частоты вращения ротора генератора [5], [10], [23], [24], [26], [28], [30], [31], [32]. 16 Результаты сравнения показывают, что учет демпферных контуров по обеим осям в уравнениях математической модели синхронного генератора (формулы 2.1-2.3) оказывает незначительное влияние на протекание переходных электромагнитных процессов лишь на интервале времени, близком к моменту изменения сигналов управления и токов нагрузки [5], [10], [28], [32]. При этом по сравнению с экспериментальными данными снижаются величины перерегулирования напряжения синхронного генератора приблизительно на 1 – 1,5% [5], [10], [28], [31], [32]. 2.2 Имитационная модель синхронного генератора типа ГТ в среде Matlab & Simulink На основании данных таблицы 1.1, объектом исследования будет выбран генератор типа ГТ40ПЧ8Б, так как он используется на выпускаемых типах воздушных судов, имеет средние значения по всем показателям и относительно других не высокую массу. Для разработки модели системы регулирования напряжения необходимо учитывать особенности протекания электромагнитных процессов в генераторе. Такими особенностями являются влияние трансформаторных ЭДС (электродвижущая сила), демпферных контуров и изменения нагрузки на динамические и статические характеристики генератора. Оценка влияния этих факторов проводилась путём сравнения реальных кривых переходных электромагнитных процессов генератора и аналогичных кривых, полученных в результате моделирования в среде Matlab для полной математической модели и моделей более низкого уровня [7], [10], [25], [28], [29], [31]. В соответствии с системой уравнений [25], [26], [27], [29], [30], в среде высокоуровневого языка программирования Matlab& Simulink, была разработана имитационная модель синхронного генератора (рисунок 2.4) Блоки abc2qd и qd2abc служат для преобразования переменных состояния генератора из фазных координат в ортогональные (оси d, q) и обратно. С помощью блоков psid, psird, psiq, psirq, psif моделируется изменения потокосцеплений генератора и его системы возбуждения. Активные и реактивные составляющие нагрузки в модели представлены блоком PQ, характер нагрузки (cosφ) учитывается блоком Delta angle. Данная модель (рисунок 2.4) позволяет исследовать статические и переходные режимы работы синхронного генератора при изменении нагрузки [25], [27], [31]. 17 Блоки преобразования из фазных координат abс в ортогональные dq Блоки учета потокосцеплений генератора и системы возбуждения Блоки учета магнитного насыщения стали Блок учета характера нагрузки Блок учета активной P и реактивной составляющей Q Рисунок 2.4 – Имитационная модель синхронного генератора в среде Matlab & Simulink При создании имитационной модели синхронного генератора использовались блоки Subsystem из пакета Simulink интегрированного в среде Matlab. В данных блоках моделировались файл-функции (M-функции), пример окна, в котором происходит задание файл-функций приведен на рисунке 2.5. Рисунок 2.5 – Окно работы с файл-функциями 18 Файл-функции, содержащие команды системы MatLab, которые моделируют работу математической модели авиационного синхронного генератора типа ГТ, приведены в таблице 2.1. Таблица 2.1 – Реализация математической модели синхронного генератора в среде Matlab 19 Таким образом, приведенное моделирование по влиянию трансформаторных ЭДС и демпферных контуров на динамические характеристики математической модели синхронного генератора позволили выявить следующее: при моделировании переходных и установившихся режимов генератора допустимо пренебрегать влиянием демпферных контуров; расчеты переходных процессов генератора целесообразно проводить с учетом влияния трансформаторных ЭДС, так как в противном случае при изменении режимов работы генератора перерегулирования напряжения будут увеличены на 5–18%, а время переходного процесса на 15–35% по сравнению с экспериментальными данными [2], [26], [32]. Разработанная данная имитационная модель авиационного синхронного генератора будет в дальнейшем использоваться для создания и исследования системы регулирования напряжения. 20 ГЛАВА 3 РАЗРАБОТКА ИМИТАЦИОННОЙ МОДЕЛИ АВИАЦИОННОГО ГЕНЕРАТОРА С СОВРЕМЕННОЙ СИСТЕМОЙ РЕГУЛИРОВАНИЯ 3.1 Разработка имитационной модели системы регулирования напряжения с потребителями в Matlab & Simulink Для создания имитационной модели синхронного генератора совместно с системой управления и потребителями (рисунок 3.1) необходимо воспользоваться следующими типами блоков [26]: 1. Synchronous Machine – модель синхронного генератора в упрощенном виде, учитывает динамику обмоток статора, возбуждения и демпфера. Выводы статорной обмотки генератора обозначаются буквами A, B и C. Рисунок 3.1 – Схема системы регулирования напряжения с потребителями в интеллектуальной среде Matlab & Simulink 2. 3-Phase Programmable Voltage Source – трехфазный программируемый источник напряжения. Вырабатывает трехфазную систему напряжений с программируемыми во времени изменениями амплитуды, фазы, частоты. В области параметров блока приводится список параметров (чисел или массивов). Элементы списка располагаются в нем в порядке создания. Ниже от 21 списка находится окно, куда выводится значение текущего параметра (или его размер, если это вектор). Phase-to-phase rms voltage – среднеквадратичное напряжение; Line-to-neutral voltages [Va Vb Vc] – линейное напряжение фаз А, В, С; Phase angle of line-to-neutral voltages [phia phib phic] – фазовые углы внутренних напряжений, генерируемые фазами А, В, С (в градусах); Frequency – частота тока в герцах. 3. 3-Phase Series RLC Load – трехфазный источник нагрузки. Параметры блока: Соединение трех фаз: Y (grounded) заземление, Y (floating) плавающее, Y (neutral) нейтральное через четвертый соединитель, Delta три фазы связанные вместе; Nominal phase-to-phase voltage Vn − номинальное напряжение фаз; Nominal frequency fn − номинальная частота тока; Active power P (W) − активная мощность; Inductive reactive power QL (positive var) − индуктивно-реактивная мощность; Capacitive reactive power QC (negative var) − емкостно-реактивная мощность; Active powers [Pa Pb Pc] (W) − активные мощности фаз; Inductive reactive powers [QLa QLb QLc] (positive var) − индуктивнореактивные мощности (положительные переменные); Capacitive reactive powers [QCa QCb QCc] (negative var) − емкостнореактивные мощности (отрицательные переменные). 4. Gain – предназначен для повышения входного сигнала, путем произведения его на коэффициент, который задается вручную. 5. Bus Selector – предназначен для облегчения развязки соединения блоков между собой, путем объединения сигналов в единую шину и выдачи требуемых. Параметры блока: Signals in the bus – Производит выбор требуемых команд. Selected signals – Выдача команд на выход. Output as bus – Все выходные сигналы объединяются в один. 6. Constant – предназначен для формирования сигнала постоянной величины. Значения задаются вручную. Имитационное моделирование, проведенное с помощью построенной модели в среде Matlab (рисунок 3.1), позволило получить характеристики генератора при изменении характера нагрузки (рисунки 3.2 – 3.4). 22 На рисунках приняты следующие обозначения: ИН – индуктивная нагрузка, ЕН – емкостная нагрузка, АН – активная нагрузка; Iа – ток статора, Pн – мощность нагрузки, P2 – активная мощность. При построении характеристик генератора в полях окна настройки задавались следующие режимы [26]: 1. в разделе Active power P(W) изменялась активная нагрузка от 0,1 до 1,7*Pн, а другие параметры задавались как QL = QC = 0; 2. в разделе Active power P(W) задавалась активно-индуктивная нагрузка: QC = 0, QL = 0.8*Pн. Параметр P(W) изменяли от 0 до 1,2*Pн; 3. в разделе Active power P(W) задавалась активно-индуктивная нагрузка: QC = 0, P(W) = 0.8. Параметр QL изменяли от 0,1 до 1,7*Pн; 4. в разделе Active power P(W) задавалась активно-емкостная нагрузка: QС = 0,8*Pн, QL = 0. Параметр P(W) изменяли от 0,1 до 1,7*Pн ; 5. в разделе Active power P(W) задавалась активно-емкостная нагрузка: QL = 0, P(W) = 0,8*Pн. Параметр QC изменяли от 0,1 до 1,7*Pн. Рисунок 3.2 – Графики зависимости характеристик синхронного генератора I a ƒ( Pн ) 23 Рисунок 3.3 – Графики зависимости характеристик синхронного генератора ƒ( Pн ) Рисунок 3.4 – Графики зависимости характеристик синхронного генератора P2 ƒ( Pн ) 24 Анализ характеристик (рисунки 3.2 – 3.4) показывает, что: 1. КПД синхронного генератора зависит как от тока нагрузки, так и от ее характера: при уменьшении коэффициента мощности (при прочих равных параметрах) КПД машины уменьшается; 2. Наиболее сильно на изменение (уменьшение) напряжения генератора влияет индуктивная нагрузка; 3. Чем больше угол φ (определяет характер нагрузки) по абсолютной величине, тем в большей степени требуется изменять ток возбуждения генератора. Таким образом, исследование свойств электрических машин значительно упрощается благодаря инструментальным средствам системы Matlab, таких как пакет специальных программных средств NNT (Neural Networks Toolbox) и системы имитационного моделирования Simulink [27]. 3.2 Современная интеллектуальная система регулирования авиационного синхронного генератора на основе нечеткой логики Для создания эффективного нечеткого регулятора необходимо разработать действенный алгоритм автоматического управления, в котором регулирующее воздействие зависит от получаемых сигналов. Примером такого регулятора является нечеткий регулятор с лингвистическими переменными (термами) и присвоенными весами для предсказывания входных данных, а значит лучшего регулирования выходного сигнала (рисунок 3.5) [40], [41]. 25 Рисунок 3.5 – Структурная схема нечеткого регулятора На рисунке 3.5 приняты следующие обозначения: y(s) – выходная переменная; g(s) – заданное значение желаемого сигнала (управляющее воздействие); e(s) – сигнал рассогласования; P – дифференциатор; ТЛП – таблица нечетких лингвистических преобразований; ke , ke* , ku – масштабные коэффициенты; E , E* , U – универсальные множества; ТЛПА – таблица лингвистических преобразований адаптивной системы; D – дефаззификатор; F – преобразователь (преобразует текущее значение рассогласования и производную от рассогласования в лингвистические значения). Выходная переменная объекта регулирования y(s) сравнивается с заданным значением g (s) , сигнал рассогласования e(s) поступает в масштабный элемент с коэффициентом ke и в дифференциатор Р, вход которого умножается на ke* в масштабном элементе. Блоки F предназначены для преобразования текущих значений рассогласования и производной от рассогласования (скорости изменения рассогласования) в их лингвистические значения (фаззификации) Метод нечеткого вывода Mamdani является наиболее часто встречающейся нечеткой методологией. Данный метод был среди первых 26 систем управления, построенных с использованием теории нечетких множеств. Вывод типа Mamdani, ожидает, что выходные функции членства будут нечеткими. После объединения, для каждой выходной переменной существует нечеткое множество, которое нуждается в дефаззификации (преобразование нечеткого множества в четкое множество) [40]. Метод Sugeno представлен линейной зависимостью каждого правила от входных переменный, что делает его работу оптимальной для включения нескольких линейных регуляторов, которые должны применяться к различным условиям работы нелинейной системы. Система нечеткого вывода Sugeno подходит для задачи плавной интерполяции линейных коэффициентов усиления, которые будут применяться во входном пространстве; это естественный и эффективный планировщик. Аналогично, система Sugeno подходит для моделирования нелинейных систем путем интерполяции между несколькими линейными моделями [41]. Типичное построение правил в Sugeno выглядит следующим образом: если Input 1 - x, а Input 2 - y, то Output - z = a x + b y + c. Система Sugeno дает возможность встраивать линейные системы в нечеткие алгоритмы. Позволяет создать нечеткую систему, которая переключается между несколькими оптимальными линейными регуляторами, поскольку высоколинейная система перемещается в своем рабочем пространстве. В рамках данной работы целесообразно использовать нечеткий метод типа Mamdani из-за интуитивно понятной структуры, адаптированности для ввода данных человеком и признания в научном сообществе. Определим ошибку управления термами, изображенными на рисунке 3.6, где N – отрицательная ошибка, P – положительная ошибка, S/M/B – величина ошибки малая, средняя и большая соответственно. Рисунок 3.6 – Плотность распределения, состоящая из семи термов В теории вероятностей появление значения случайной величины является случайным событием. События образуют полную группу, если хотя 27 бы одно из них должно непременно произойти. Два события являются несовместимыми, если их совместное появление невозможно. Таким образом, возможные значения случайной величины образуют полную группу попарно несовместимых событий. Два совместимых события считаются независимыми, если вероятность появления одного из них не зависит от того, появилось или не появилось второе. Если события зависимы, то связь между ними определяется условной вероятностью появления одного из них при условии, что появилось второе. Для расчетов используется теорема сложения вероятностей и теорема умножения вероятностей [40], [41], [42]. Исходя из теории вероятностей, можно рассчитать регулирующее воздействие «u» исходя из отклонения «e» и дискретной скорости его изменения «Δe». Согласно формуле полной вероятности, появление терма регулирующего воздействия определяется как: p μ dμ 0.375 p PS dεdΔε 0.125 0.375 0.125 p PM dε dΔε= 0.375 p PS dεdΔε 0.625 p PM dεdΔε (3.1) Математическое ожидание в качестве конкретного сигнала на выходе определим следующим образом: Δμ = 𝑚Δμ . Вычисление математического ожидания можно выполнить с помощью формулы полной вероятности или механической аналогии по формуле выше: терма PS имеет математическое ожидание 1/3 с весом 0,375; терма PM имеет математическое ожидание 2/3 с весом 0.625 [43], [44]. Математическое ожидание приращения находится из баланса моментов сил: 1 2 0.375 0.625)mΔμ 0.375 0.625 , 3 3 (3.2) 0.375 2 0.625 0.542 3 0.375 0.625 (3.3) Значит mΔμ По найденному приращению определяем регулирующее воздействие μ k μ k 1 Δμ k . 28 (3.4) Для получения реального изменения регулирующего воздействия необходимо его нормированное значение умножить на максимум реального диапазона изменения. Согласно формуле 3.1 было создано 7 правил, учитывающих плотность распределения регулирующего воздействия. На рисунке 3.7 представлено визуальное отображение правил нечеткого регулятора. Рисунок 3.7 – Визуальное отображение правил нечеткого регулятора Структура регулятора должна содержать следующие блоки [43], [44], [45]: блок преобразования входных данных; блок формирования алгоритма регулирования; блок вычисления математического ожидания; интегрирующий исполнительный механизм. Широко распространены регуляторы с некоторыми изменениями, вместо теории вероятностей применяются методы теории нечетких множеств. Такие регуляторы называются нечеткими. На основании условной вероятности были произведены вычисления управляющего сигнала и сформированы 7 правил (таблица 3.1) регулирования при помощи лингвистических термов. На рисунке 3.8 отображены 7 правил нечеткого регулятор. 29 Рисунок 3.8 – Правила нечеткого регулятора, где e – ошибка, de – скорость изменения ошибки, Ua – регулирующее воздействие Таблица 3.1 – Команды для формирования правил нечеткого регулятора Настройки системы Формирование входных данных ошибки Формирование выходного сигнала Формирование входных данных скорости изменения ошибки Правила нечеткого регулятора Таким образом, исследование свойств электрических машин значительно упрощается благодаря инструментальным средствам системы Matlab, таких как пакет специальных программных средств NNT (Neural Networks Toolbox) и системы имитационного моделирования Simulink [27]. Разработка и исследование регулятора на основе нейронной сети демонстрирует возможность создания интеллектуальных системы регулирования напряжения авиационных синхронных генераторов. Благодаря возможности обучения сети достигаются желаемые результаты параметров работы регулятора, что обеспечивает повышения надежности и точности 30 электрической энергии воздушных судов. В результате разработки и исследования нечеткого регулятора было выявлено, что 7 правил составляет минимальное количество правил для нечеткого регулятора, позволяющих эффективно осуществлять управление выходным сигналом. Результатом исследования является разработанная система регулирования и выбор ее оптимальных параметров, коэффициентов адаптивного контура, обеспечивающих устойчивость к внешним возмущениям и случайной ошибке. 31 ГЛАВА 4 СИСТЕМА РЕГУЛИРОВАНИЯ АВИАЦИОННОГО СИНХРОННОГО ГЕНЕРАТОРА НА ОСНОВЕ ПИД РЕГУЛЯТОРА 4.1 Анализ методов расчета ПИД-регулятора авиационного синхронного генератора В настоящее время, обильно применяются во всех отраслях, где требуется автоматическое управление, аналоговые регуляторы, реализующие пропорционально-интегрально-дифференцирующий (ПИД) закон управления Данные регуляторы напряжения (ПИД-регулятор) описываются выражением (формула 4.1): t 1 de(t ) u (t ) K p e(t ) e(t )dt Td , Ti 0 dt (4.1) где u - выходная переменная; K p , Ti, Td – пропорциональный коэффициент, постоянная интегрирования и постоянная дифференцирования соответственно; t – время; e – сигнал рассогласования системы. Регулятор состоит из пропорциональной P, интегральной I и дифференциальной D составляющих. Пропорциональная составляющая является разностью текущего значения (выходного) и задаваемого (установки). От величины ошибки зависит величина управляющего сигнала и скорости достижения требуемого результата (быстродействие). В связи со своей особенностью использование только этой составляющей в регуляторе приведет к постоянной статической ошибке (если сигнал рассогласования равен 0, и управляющее воздействие тоже). Интегральная составляющая фактически является интегралом от ошибки по времени (периода дискретизации). Изменяя коэффициент достигается изменение резкости составляющей. Данная составляющая предназначена устранять статическую ошибку, за счет того, что даже небольшие его значения приводят к мгновенному реагированию регулятора, тем самым система приходит к заданному значению и достигается максимальная точность. Дифференциальную составляющую можно охарактеризовать как производная ошибки по времени. Только здесь уже ошибкой считается 32 разность предыдущей ошибки и текущей. Другими словами, D составляющая реагирует на скорость изменения разницы текущего и выходного сигнала, что позволяет минимизировать величину перерегулирования, тем самым исправить возможные будущие ошибки. Для расчета коэффициентов используется метод построения переходной характеристики. Если заданный переходный процесс установившийся, его характеристика описывается двумя значениями: L и T. Они находятся путем проведения касательной к точке перегиба переходной характеристики [46]. Проведя касательную к точке перегиба переходной характеристики, получили значения T 0.71; L 0.06; a 0.005, где a выражается через параметры переходной характеристики объекта регулирования. Для оценки эффективности ПИД-регулятор напряжения была создана имитационная модель регулятора (рисунок 4.1) с использованием следующих блоков: 1. PID Controller – используется для настройки коэффициентов, а также выбора требуемого типа регулятора; 2. Saturation – распределяет входной сигнал в заданный диапазон; 3. Rate Limiter − блок, ограничивающий значение производной входного сигнала; 4. Transfer Fcn − блок для задания передаточной функции объекта управления; 5. Step – формирует ступенчатый выходной сигнал, задается вручную; 6. Scope − осциллограф; Рисунок 4.1 – Имитационная схема ПИД-регулятора Matlab Существует большое количество различным методик (методов) расчета параметров ПИД-регулятора (таблица 4.1): Таблица 4.1 − Методы расчета коэффициентов ПИД-регулятора Метод Kp Ti Td Метод ЗиглераНикольса по отклику на скачок 1, 2 / a 0,9 L / K 0,5 L / K 33 Продолжение таблицы 4.1 Метод CHR по отклику на изменение уставки без перерегулирования 0,6 / a 1,0 L / K 0,5 L / K Метод CHR по отклику на изменение уставки с 20% перерегулированием 0,95 / a 1, 4 L / K 0, 47 L / K 0,95 / a 2, 4 L / K 0, 42L / K Метод CHR по отклику на внешние возмущения с 20% перерегулированием 1, 2 / a 2,0 L/ K 0, 42 L / K Метод Cohen-Coon 1,35 0,18τ 1 a 1 τ 2,5 2τ L 1 0,39τ 0,37 0,37τ L 1 0,81τ 0.956 T Метод CHR по отклику на внешние возмущения без перерегулирования Метод ITAE Метод AMIGO T K L 0,855 1 T 0, 2 0, 45 K L L 0, 796 0,147 T L 0,308T T 0, 4 L 0,8T L L 0,1T 0,5 LT 0,3L T 0,929 Для анализа эффективности работы ПИД-регуляторов, рассчитанных по различным методикам (см. таблицу 4.1), были построены временные характеристики данных регуляторов в среде MATLAB/SIMULINK (рисунки 4.2 – 4.19). 34 Рисунок 4.2 − Реакция ПИД-регулятора внешнее случайное воздействие (ручной расчет параметров) Рисунок 4.3 − Реакция ПИД-регулятора с реакцией на внешнее периодическое воздействие (ручной расчет параметров) Коэффициенты, рассчитанные по правилам ручной настройки, определяются опытным путем. Анализируя полученные графики можно сделать вывод что, с увеличением коэффициента K p увеличивается скорость достижения системой заданного значения. При дальнейшем увеличении этого коэффициента система становиться неустойчивой. Статическая ошибка уменьшается, при увеличении коэффициента Ki 1 / Ti , но если система медленно реагирует на изменений, а коэффициент большой, система может выйти из равновесия. Изменение коэффициента Td положительно влияет на стабильности системы, контролирую скорость ее изменения. Использование среды программирования MATLAB существенно сокращает время ручной настройки параметров, позволяя при минимальных затратах на разработку получить оптимальный результат. Рисунок 4.4 − Реакция ПИД-регулятора Рисунок 4.5 − Реакция ПИД-регулятора на внешнее случайное возмущение на внешнее периодическое возмущение (параметры по методу Зиглера-Никольса) (параметры по методу Зиглера-Никольса) 35 ПИД-регуляторы с коэффициентами, рассчитанными по методу ЗиглераНикольса, обладают малым запасом устойчивости. Данный метод дает самое большое амплитудное значение переходной функции, значительную величину перерегулирования. Достоинством метода является малое время нарастания функции до максимума и быстрое время установления переходных процессов. В целом можно сказать, что метод Зиглера-Никольса дает не самые оптимальные значения параметров регулирования. Рисунок 4.6 − Реакция ПИД-регулятора Рисунок 4.7 − Реакция ПИД-регулятора по по отклику на изменение уставки с реакцией на внешнее воздействие (параметры рассчитаны по методу CHR) отклику на изменение уставки с реакцией на внешнее периодическое воздействие (параметры рассчитаны по методу CHR) Рисунок 4.8 − Реакция ПИД-регулятора по отклику на изменение уставки с 20% перерегулированием с реакцией на внешнее воздействие (параметры рассчитаны по методу CHR) Рисунок 4.9 − Реакция ПИД-регулятора по отклику на изменение уставки с 20% перерегулированием с реакцией на внешнее периодическое воздействие (параметры рассчитаны по методу CHR) 36 Рисунок 4.10 − Реакция ПИД-регулятора по отклику на внешние возмущения с внешним случайным возмущением (параметры рассчитаны по методу CHR) Рисунок 4.11 − Реакция ПИД-регулятора по отклику на внешние возмущения с внешним периодическим возмущением (параметры рассчитаны по методу CHR) Рисунок 4.12 − Реакция ПИД-регулятора по отклику на внешние возмущения с 20% перерегулированием с внешним случайным возмущением (параметры рассчитаны по методу CHR) Рисунок 4.13 − Реакция ПИД-регулятора по отклику на внешние возмущения с 20% перерегулированием с внешним периодическим возмущением (параметры рассчитаны по методу CHR) В методе CHR для расчетов коэффициентов использован уже не декремент затухания, как в методе Зиглера-Никольса, а критерий максимальной скорости нарастания при отсутствии перерегулирования и с 20 %-м перерегулированием. Для ослабления влияний внешних воздействий на качество регулирования в методе CHR используется следующий подход: исследованийt реакции системы при воздействии на нее внешнего возмущения (использовались случайные и периодические). Для повышения качества регулирования в методе CHR используется следующий подход: исследование реакции системы при изменении уставки. В результате данного исследования было выявлено увеличение устойчивости системы Чтобы совместить эти два направления расчетов, используют регуляторы с двумя степенями свободы (двухканальные). 37 Рисунок 4.14 − Реакция ПИД-регулятора на внешнее случайное воздействие (параметры рассчитаны по методу Cohen - Coon) Рисунок 4.15 − Реакция ПИД-регулятора на внешнее периодическое воздействие (параметры рассчитаны по методу Cohen - Coon) Метод Cohen-Coon привлекателен тем, что не требует достижения системы перерегулирования и является одним из вариантов метода ЗиглераНикольса. Метод отличается высокой реакцией на малейшие воздействия (сигналы). В сравнении с методом Зиглера-Никольса настройка параметров системы регулирования методом Cohen-Coon является более сложной задачей. Рисунок 4.16 − Реакция ПИД-регулятора на внешнее случайное воздействие (параметры рассчитаны по методу ITAE) Рисунок 4.17 − Реакция ПИД-регулятора на внешнее периодическое воздействие (параметры рассчитаны по методу ITAE) Метод ITAE являющийся одним из видов метода AMIGO показал большую устойчивость к помехам и малую величину перерегулирования, что важно при разработке регулятора для силовых установок, где большое амплитудное значение возмущений может привести к выходу техники из строя. 38 Рисунок 4.18 − Реакция ПИД-регулятора на случайное внешнее воздействие (параметры рассчитаны по методу AMIGO) Рисунок 4.19 − Реакция ПИД-регулятора на внешнее периодическое воздействие (параметры рассчитаны по методу AMIGO) Регуляторы на основании метода AMIGO обладают достаточно малой величиной перерегулирования и неплохим запасом устойчивости по фазе [46], [47]. Ручной метод подбора коэффициентов ПИД- регулятора заключается в выборе пропорциональной, интегральной, дифференциальной составляющей путем метода научного тыка (проб и ошибок). По результату реакции системы на возмущения вносятся корректировки и заново проводится эксперимент, и так до тех пор, пока результат не станет удовлетворительным. Результаты исследования эффективности данного метода с учетом возмущений показаны на рисунках 4.20 – 4.21. Рисунок 4.20 − Реакция ПИДрегулятора внешнее случайное Рисунок 4.21 − Реакция ПИД-регулятора с реакцией на внешнее периодическое воздействие (ручной расчет параметров) воздействие (ручной расчет параметров) Качественное сравнение эффективности регуляторов напряжения с применением ПИД-законов, коэффициенты которых рассчитаны с использованием различных методов, показаны на рисунках 4.22 – 4.24. Метод ITAE на рисунке 4.22 не приведен из-за его большого времени установления и нарастания переходных процессов. 39 Метод AMIGO 2,98 Метод Cohen-Coon 1,966 Метод CHR , по отклику на внешние возмущения 1,035 Метод CHR , по отклику на изменение уставки 0,997 Метод Зиглера-Никольса 1,035 0 1 2 Секунды 3 4 Рисунок 4.22 − График времени установления переходных процессов с применением различных методик расчета коэффициентов для построения ПИД-регулятора Метод ITAE 1 Метод AMIGO 1,23 Метод Cohen-Coon 1,39 Метод CHR , по отклику на внешние возмущения Метод CHR , по отклику на изменение уставки Метод Зиглера-Никольса 1,3 1,18 1,36 0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 Рисунок 4.23 − График амплитудных значений переходного процесса с применением различных методик расчета коэффициентов для построения ПИД-регулятора 40 Метод ITAE 0,525 Метод AMIGO 0,055 Метод Cohen-Coon 0,0598 Метод CHR , по отклику на внешние возмущения 0,0696 Метод CHR , по отклику на изменение уставки 0,0962 Метод Зиглера-Никольса 0,0598 0 0,1 0,2 0,3 0,4 Секунды 0,5 0,6 Рисунок 4.24 − График времени нарастания переходного процесса с применением различных методик расчета коэффициентов для построения ПИД-регулятора Как можно заметить все методы имеют свои положительные и отрицательные стороны, а выбор реализуемого зависит как от характеристики системы, так и от возложенных на нее функций. Настройка ПИД-регулятора, это серьезная задача, с которой все равно придется сталкиваться, поскольку характеристики электрических машин с течением времени меняются, следовательно, нужны новые коэффициенты. 4.2 Адаптивный ПИД-регулятор авиационного синхронного генератора В настоящее время, обильно применяются во всех отраслях, где требуется автоматическое управление аналоговые регуляторы, реализующие пропорционально-интегрально-дифференцирующий (ПИД) закон управления. Такие регуляторы, используют принцип управления по отклику и на сегодняшний день, если не достигли, то уже значительно приблизились по таким показателям как точность и быстродействие к своему пределу. Исходя из этого, дальнейшая модернизация системы управления возможна только при переходе на новые принципы регулирования и инженерные решения, что может усложнить процесс как производства, так и настройки параметров регулятора. Таким образом в последнее время ведутся работы по разработке и исследованию систем управления на основе цифрового ПИД-регулятора (рисунок 4.25). 41 Рисунок 4.25 – Схема цифрового ПИД-регулятора в среде Matlab Данная схема включает в себя: – PID Controller – блок для задания коэффициентов П-, ПИ-, ПД- и ПИДрегуляторов; – Saturation – блок, ограничивающий уровень входного сигнала; – Rate Limiter – блок, ограничивающий значение производной входного сигнала; – Transfer Fcn – блок для задания передаточной функции; – Step – блок для задания входного ступенчатого сигнала; – Sum – Сумматор; – Scope – виртуальный осциллограф; – Check Step Response Characteristics – блок для оптимизации параметром регулятора и задания желаемого переходного процесса (Simulink Response Optimization/ Check Step Response Characteristics). На основании результатов исследования был выбран алгоритм нахождения оптимальных коэффициентов ПИД–регуляторов по методу Зиглера-Николса. Для этого сначала необходимо задать нулевые значения дифференциальному kd и интегральному k i коэффициентам. Затем производим настройку пропорционального коэффициента k p , путем увеличения его значения пока системой не будет потеряно равновесие. Таким образом появляются дополнительные параметры системы, такие как: ku характеризующийся предельной величиной пропорционального коэффициента k p ; pu – период автоколебаний. После проведения такого рода манипуляций, рассчитываются новые коэффициенты относительно приведенных формул: : kp 0, 6ku , ki 1, 2(ku pu ) , kd 3ku pu / 40 . Настройки параметров ПИД-регулятора представлены на рисунке 4.26. Благодаря приведению соответствующих коэффициентов регулятора к нулевым значениям можно добиться любого вида ПИД-регулятора. 42 Рисунок 4.26 – ПИД-регулятор и окно задания параметров регулятора Объект регулирования (рисунок 4.27) представлен в виде трех последовательно соединенных блоков. Сам объект задан передаточной функцией (блок Transfer Fcn), перед которой помещены нелинейности, ограничивающие уровень входного сигнала (блок Saturation) и значение его производной (блок Rate Limiter). Рисунок 4.27 – Описание объекта управления На выходе объекта (см. рисунок 4.25) располагается блок оптимизации Check Step Response Characteristics, окно которого показано на рисунке 4.28. 43 Рисунок 4.28 – Блок оптимизации Check Step Response Characteristics Для запуска блока необходимо ввести соответствующие значения коэффициентов kp, ki и kd в соответствующие разделы PID Controller (рисунок 4.26). Для открытия окна ограничений дважды щелкните мышью по блоку Signal Constraint. Окно ограничений (см. рисунок 4.28) содержит оси отклика (Amplitude) и времени (Time); панель меню (вверху окна); панель управления (внизу окна); верхнюю и нижнюю ограничительные линии (заданные по умолчанию). Окно ограничений имеет заданные по умолчанию размеры и положение. Их можно изменять при помощи мыши. Верхняя и нижняя ограничительные линии (рисунок 4.28) в окне ограничений задают пределы области, в которую должен попасть сигнал отклика системы управления. По умолчанию эта область задает время нарастания 5 секунд и время регулирования 7 секунд. Эти границы необходимо изменить, чтобы они соответствовали указанным ранее значениям (желаемым). При необходимости ограничительные линии можно устанавливать под углом к горизонтали. Для этого необходимо взять мышью конец линии и перемещать его в нужном направлении. Конечный переходной процесс 1, удовлетворяющий заданным ограничениям, показан на рисунке 4.29. 44 Рисунок 4.29 – Графики переходных процессов После выполнения оптимизации MatLab выводит сообщение следующего вида (рисунок 4.30), которое выдает значения коэффициентов kp ki kd различных вариантов переходных процессов и значения этих коэффициентов оптимального, удовлетворяющего нашим условиям, переходного процесса 1 (рисунок 4.29). Рисунок 4.30 – Итог вычисления оптимальных коэффициентов 45 В настоящее время, пропорционально-интегрально-дифференцирующие регуляторы широко используются в нашей жизни. Только в технических системах они участвуют более чем в 90 процентах регулирующих контуров. Применение же этого закона регулирования напряжения в авиации позволяет повысить качество электрической энергии вырабатываемой синхронными генераторами, что способствует к увеличению надежность эксплуатации электрического оборудования на воздушном судне. Это достигается путем уменьшения величины отклонения напряжения, увеличением скорости обработки информации, высокого уровня робастности, минимизированием статической ошибки. На основании проведенных исследований системы электрического снабжения с трехфазным синхронным генератором переменного тока (ГТ40ПЧ8Б) было выявлено, что использование цифрового ПИД-регулятора обеспечивает уменьшение времени регулирования да (0.0140.023)с, при этом диапазон изменения напряжения составил (106-123)В. Статическая ошибка с течением времени достигла минимального значения. Таким образом, можно сделать вывод, что смоделированный и оптимизированный цифровой ПИД-регулятор будет соответствовать всем требованиям современных систем электрического снабжения самолетов [10]. 46 ЗАКЛЮЧЕНИЕ В магистерской работе были решены все поставленные задачи, а именно: 1. Разработаны математическая и имитационная модели: авиационного бесконтактного синхронного генератора типа ГТ в среде моделирования Matlab & Simulink; современные системы регулирования напряжения (цифровой ПИД-регулятор, регулятор на основе нейронной сети, нечеткий регулятор); 2. Проведены исследования переходных и установившихся режимов при различных коммутациях нагрузок, а также оценены показатели качества электроэнергии данных систем при различных параметрах системы регулирования напряжения (времени запаздывания tз и периода квантования Т по времени); 3. В среде Matlab & Simulink проводились исследования эффективности аналогового и цифровых систем регулирования при воздействии различных возмущений; Математическая модель синхронного генератора написана в ортогональных осях d, q при общепринятых допущениях Исследование эффективности цифрового регулирования напряжения выполнено на виртуальной модели в среде Matlab. Проведен анализ кривых изменения выходного напряжения синхронного генератора с учетом и без учета влияния трансформаторных ЭДС в математической модели синхронного генератора [25], [27], [28], [31]. Результаты исследования имитационного моделирования регуляторов показали, что переход от аналогового ПИД-регулятора к цифровому приводит к снижению на 77,8 процентов потребления электрической энергии, затрачиваемой на регулирование. Разница амплитудных значений между аналоговым ПИД- регулятором и цифровыми регуляторами значительная, что говорит о высокой робастности цифровых регуляторов по сравнению с аланговым ПИД- регулятором; При использовании цифровых интеллектуальных систем регулирования сокращается время регулирования, тем самым система раньше достигает требуемых параметров. С помощью имитационное моделирование в среда Matlab & Simulink можно решить ряд различных задач таких как: анализ данных, разработка алгоритмов, моделирование и проектирование сложных технических систем, создавать моделей и приложений, расчетов и построение характеристик 47 системы с целью их анализа и т.д. Широкий аспект назначения этого инструмента делает его универсальным. Использование данной среды моделирования для исследования систем регулирования позволяет уменьшить как трудоемкость, так и затраты в рамках учебного процесса. Таким образом, использование пакета моделирования Matlab в имитационных лабораторных установках, позволяет обучающимся на практике проверить основные положения теории, приобрести навыки по методике экспериментальных исследований, что положительно способствует усвоению теоретического материала. 48 СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Гарганеев, А. Г. Технико-экономические оценки создания самолета с полностью электрифицированным оборудованием / А. Г. Гарганеев, С. А.Харитонов // Доклады ТУСУРа. –2009. – № 2 (20). – декабрь. – С.179–184. 2. Воронович, С. Полностью электрический самолет. Современное состояние и перспективы развития / С. Воронович, В. Каргопольцев, В. Кутахов // Авиапанорама. – 2009. – Март–Апрель. – С.14–17. 3. Карнаухов, Н. С. Некоторые вопросы реализации концепции самолетов «All electric aircraft» / Н. С. Карнаухов, А. Г. Капустин // Ежемесячный научно-практический журнал «Изобретатель». − 2015. − 9(189). − С. 27−29. 4. Гарганеев, А. Г. Технико-экономические оценки создания самолета с полностью электрифицированным оборудованием / А. Г. Гарганеев, С. А.Харитонов // Доклады ТУСУРа. –2009.–№ 2 (20).– декабрь. – С.179–184. 5. Вентильные электродвигатели постоянного тока и возрождение концепции полностью электрифицированного самолета / Е. В. Волокитина, В. Ф. Шалагинов, О. И. Овечкин // Электроника и электрооборудование транспорта. – 2005. – №5. – С.7-9. 6. Интернет-портал компании Aircraft Electrical Power Systems – Charged with Opportunities [Электронный ресурс]. – Режим доступа: www.aerospace.frost.com. – Дата доступа: 18.08.2023. 7. Левин, А. В. Электрический самолет: от идеи до реализации. / А. В. Левин, И. И. Алексеев, С. А. Харитонов, Л. К. Ковалев // Москва: Машиностроение, 2010. – 288 с. 8. Брускин, Д. Э. Самолеты с полностью электрифицированным оборудованием. Сер. Электрооборудование транспорта. – Т. 6 / Д. Э. Брускин, С. И. Зубакин. – Москва: ВИНИТИ, 1986. – 108 с. 9. ГОСТ Р 21558 – 2018.Системы возбуждения турбогенераторов, гидрогенераторов и синхронных компенсаторов. Общие технические условия. – Москва: Стандартинформ, 2019. – 19 с. 10. ГОСТ Р 54073 – 2017. Системы электроснабжения самолетов и вертолетов. Общие требования и нормы качества электроэнергии. – Москва: Стандартинформ, 2018. – 36 с. 11. Метод верификации параметров цифровых регуляторов реализуемых на цифровых управляющих устройствах / А. А. Дружинин, А. В. Пучков, А. С. Асочаков // Актуальные проблемы авиации и космонавтики // Сборник материалов VI Международной научно-практической конференции, 49 посвященной Дню космонавтики, Красноярск, 13–17 апреля 2020 года. – СибГУ им. М.Ф. Решетнева, 2020. – С.503-505. 12. Устименко В. В., Параметрический синтез регулятора системы автоматического регулирования / В.В. Устименко // Актуальные проблемы авиации и космонавтики. Сборник материалов VI Международной научнопрактической конференции, посвященной Дню космонавтики, Красноярск, 13– 17 апреля 2020 года. – СибГУ им. М.Ф. Решетнева, 2020. – С.528-530. 13. Применение нечетких регуляторов в динамических системах / В. А. Мызникова, В. В. Устименко, А. В. Чубарь // Актуальные проблемы авиации и космонавтики // Сборник материалов V Международной научно-практической конференции, посвященной Дню космонавтики, Красноярск, 08–12 апреля 2019 года. – СибГУ им. М.Ф. Решетнева, 2019. – С.592-594. 14. Выявление причин отказов авиационного оборудования: справочник / А. В. Майоров, С. М. Мусин, Б. Ф. Янковский. – Москва: Транспорт, 1996. – 256 с. 15. Савина, М. Г., Юрковец, Н. В. Авиационные генераторы переменного тока / М. Г. Савина, Н. В. Юрковец // Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии» Т. 1. – №8, 2012 С. 194-195. 16. Электрооборудование воздушных судов / С. А. Решетов, С. П. Кононов, Н. В. Максимов и др. // под ред. С. А. Решетова. Москва: Транспорт, 1991. – 319 с. 17. АО «ЛЕПСЕ» - Официальный сайт машиностроительного завода ЛЕПСЕ. Россия, Кировская область, г. Киров [Электронный ресурс]. – Режим доступа: lepse.com. – Дата доступа:22.08.2023. 18. АО «Сарапульский электрогенераторный завод» / АО «СЭГЗ», г. Сарапул, республика Удмуртия, Россия [Электронный ресурс]. – Режим доступа: segz.ru. – Дата доступа: 22.08.2023. 19. Карнаухов, Н. С. Автономная система электроснабжения с цифровым управлением для перспективных воздушных судов / Н. С. Карнаухов, А. Г. Капустин // Электроэнергетика и электромеханика: сборник научно-технических трудов международной научной конференции. – Воронеж: НОУ ВПО «Междунар. ин-т компьют. технологий», 2015. – 60 с. 20. Карнаухов, Н. С. Синтез и анализ оптимального закона динамической коррекции напряжения системы генерирования электроэнергии переменного тока / Н. С. Карнаухов, А. Г. Капустин // Международная научнотехническая конференция «Перспективные информационные технологии», 28– 30 апреля 2015 г: сборник научных трудов, том 2. – Самара: СГАУ им. академика С. П. Королева, 2015. – 424 с. 50