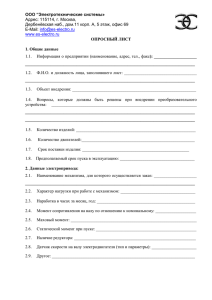
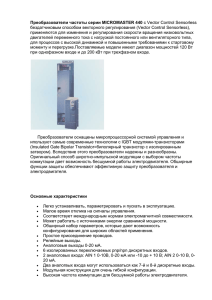
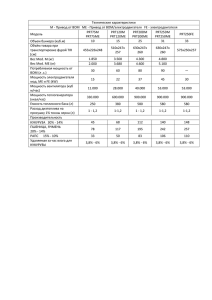
Частное профессиональное образовательное учреждение «КОЛЛЕДЖ УПРАВЛЕНИЯ И ПРОИЗВОДСТВА» (наименование организации) УТВЕРЖДАЮ Директор колледжа ЧПОУ «КУП» ____________________А.А.Батрак «30» августа 2017 г. МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ ПО ВЫПОЛНЕНИЮ КУРСОВОГО ПРОЕКТИРОВАНИЯ ПМ.01 ОРГАНИЗАЦИЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И РЕМОНТА ЭЛЕКТРИЧЕСКОГО И ЭЛЕКТРОМЕХАНИЧЕСКОГО ОБОРУДОВАНИЯ ПО МДК 01.03 «ЭЛЕКТРИЧЕСКОЕ И ЭЛЕКТРОМЕХАНИЧЕСКОЕ ОБОРУДОВАНИЕ» 13.02.01 «ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ И ОБСЛУЖИВАНИЕ ЭЛЕКТРИЧЕСКОГО И ЭЛЕКТРОМЕХАНИЧЕСКОГО ОБОРУДОВАНИЯ (ПО ОТРАСЛЯМ)» Москва 2017 Организация разработчик: Частное профессиональное образовательное учреждение «Колледж управления и производства» Методические рекомендации по выполнению курсовой работы являются частью учебнометодического комплекса (УМК) по МДК 01.03 «Электрическое и электромеханическое оборудование» 2 СОДЕРЖАНИЕ Введение 5 1. Цель курсового проекта 8 2. Задачи курсового проектирования 9 3. Структура курсового проекта 9 4. Темы курсовых проектов 11 5.Последовательность выполнения проекта 18 ГЛАВА 1. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ЭЛЕКТРИЧЕСКИМ ПРИВОДАМ 1.1. Технические требования, предъявляемые к электрическим приводам 21 1.2. Условия работы электроприводов 24 1.3. Проверка возможности и условия прямого пуска асинхронных электроприводов 25 Г Л А В А 2. ЭЛЕКТРОПРИВОД И АВТОМАТИЗАЦИЯ НАСОСНЫХ УСТАНОВОК 2.1. Выбор типа и мощность водоснабжающей установки 28 2.2. Выбор технических параметров насосной установки и обоснование условий работы насосной установке 29 Г Л А В А 3. ОБОСНОВАНИЕ И ВЫБОР ТИПА ЭЛЕКТРОДВИГАТЕЛЯ И СТЕПЕНЬ ЗАЩИТЫ (IP) 3.1. Обоснование и выбор типа передачи вращательного момента от электродвигателя к насосу 30 3.2. Расчет и построение нагрузочных диаграмм электродвигателя 30 3.3. Определение продолжительности работы электроприводов 31 3.4. Обоснование режима работы основного насоса 32 3.5. Определение приведенного момента инерции к валу электрического двигателя 36 3.6 Определение продолжительности пуска основного насоса 38 3.7.Расчет и построение механических характеристик рабочего насоса 38 3.8.Расчет и построение механических характеристик электродвигателей рабочих насосов 40 ГЛАВА 4. АВТОМАТИЗАЦИЯ СИСТЕМЫ УПРАВЛЕНИЯ НАСОСНОЙ УСТАНОВКИ 4.1. Проверка выбранного асинхронного электродвигателя по перегрузочной способности и по пусковому моменту 44 4.2. Разработка принципиальных электрических схем автоматизации технологического процесс работы насосных установок 48 4.3. Выбор аппаратуры защиты и управления и выбор принципиальных электрических схем 49 4.4. Условное обозначение на электрических схемах 4.5. Принцип работы схемы управления и защиты асинхронных двигателей насосной установки 52 4.6. Обоснование силовой электрической схемы управления и защиты асинхронных двигателей насосной установки 53 3 6. Охрана труда и техника безопасности при эксплуатации насосных установок Заключение Составление списка источников и литературы ОБЩИЕ ПРАВИЛА ОФОРМЛЕНИЯ КУРСОВЫХ ПРОЕКТОВ Литература, используемая при выполнении курсового проекта ПРИЛОЖЕНИЕ 55 57 58 59 62 63 4 Введение Данное методическое пособие предназначено для студентов специальности 13.02.11 «Техническая эксплуатация и обслуживание электрического и электромеханического оборудования (по отраслям)», выполняющих курсовой проект по МДК 01.03 «Электрическое и электромеханическое оборудование». Студенты, изучающие эксплуатацию, обслуживание и ремонт электрического и электромеханического оборудования, должны иметь представление о механическом оборудовании, технологии, понимать электрическую схему того или иного механизма. Для этого требуется изучение теоретических основ электропривода, управления электроприводами. Эти разделы входят в курс изучения МДК 01.03 «Электрическое и электромеханическое оборудование». Электропривод - это управляемая электромеханическая система. Её назначение - преобразовывать электрическую энергию в механическую и обратно и управлять этим процессом. Электропривод имеет два канала - силовой и информационный рис.(1.1). По первому транспортируется преобразуемая энергия (широкие стрелки на рис. 1.1), по второму осуществляется управление потоком энергии, а также сбор и обработка сведений о состоянии и функционировании системы, диагностика ее неисправностей (тонкие стрелки на рис. 1.1). Рис. 1.1. Общая структура электропривода Электропривод взаимодействует с системой электроснабжения или источником электрической энергии, с одной стороны, с технологической установкой или машиной, с другой стороны, и наконец, через информационный преобразователь ИП с информационной системой более высокого уровня, часто с человеком - оператором, с третьей стороны представленной на рис. (1.1). Силовой канал в свою очередь состоит из двух частей - электрической и механической и обязательно содержит связующее звено электромеханический преобразователь, представленный на рис.(1.1). 5 В электрическую часть силового канала входят устройства ЭП, передающие электрическую энергию от источника питания (шин промышленной электрической сети, автономного электрического генератора, аккумуляторной батареи и т.п.) к электромеханическому преобразователю ЭМП и обратно и осуществляющие, если это нужно, преобразование электрической энергии. Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного органа установки, в котором полезно реализуется механическая энергия. Можно считать, что электропривод как подсистема входит в указанные системы, являясь их частью. Действительно, специалиста по электроснабжению электропривод обычно интересует как потребитель электроэнергии, технолога или конструктора машин - как источник механической энергии, инженера, разрабатывающего или эксплуатирующего АСУ, - как развитый интерфейс, связывающий его систему с технологическим процессом или системой электроснабжения. Практически все процессы, связанные с механической энергией, движением, осуществляются электроприводом. Исключение составляют лишь автономные транспортные средства (автомобили, самолеты, некоторые виды подвижного состава, судов), использующие неэлектрические двигатели. В относительно небольшом числе промышленных установок используется гидропривод, еще реже - пневмопривод. Столь широкое, практически повсеместное распространение электропривода обусловлено особенностями электрической энергии возможностью передвигать ее на любые расстояния, постоянной готовностью к использованию, легкостью превращения в любые другие виды энергии. Сегодня в приборных системах используются электроприводы, мощность которых составляет единицы микроватт; мощность электропривода компрессора на перекачивающей газ станции - десятки мегаватт, т.е. диапазон современных электроприводов по мощности превышает 1012. Такого же порядка и диапазон по частоте вращения: в установке, где вытягиваются кристаллы полупроводников, вал двигателя должен делать 1 оборот в несколько десятков часов при очень жестких требованиях к равномерности движения; частота вращения шлифовального круга в современном хорошем станке может достигать 150000 об/мин. Но особенно широк - безгранично широк - диапазон применений современного электропривода: от искусственного сердца до шагающего экскаватора, от вентилятора до антенны радиотелескопа, от стиральной машины до гибкой производственной системы. Именно эта особенность теснейшее взаимодействие с технологической сферой - оказывала и оказывает на электропривод мощное стимулирующее влияние. Непрерывно растущие требования со стороны технологических установок определяют 6 развитие электропривода, совершенствование его элементарной базы, его методологии. В свою очередь, развивающийся электропривод положительно влияет на технологическую сферу, обеспечивает новые, недоступные ранее возможности. С энергетической точки зрения электропривод - главный потребитель электрической энергии: сегодня в развитых странах он потребляет более 60% всей производимой электроэнергии. В условиях дефицита энергетических ресурсов это делает особенно острой проблему энергосбережения в электроприводе и средствами электропривода. Специалисты считают, что сегодня сэкономить единицу энергетических ресурсов, например, 1т условного топлива, вдвое дешевле, чем ее добыть. Нетрудно видеть, что в перспективе это соотношение будет изменяться: добывать топливо становится всё труднее, а запасы его всё убывают. Функции электропривода Рассмотрим подробнее силовой (энергетический) канал электропривода рис.(1.2). Будем полагать, что мощность Р передается от сети (Р1) к рабочему органу (Р2), что этот процесс управляем и что передача и преобразование мощности сопровождается некоторыми ее потерями Р в каждом элементе силового канала. Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической энергии, поставляемой источником (сетью) и характеризуемой напряжением Uс и током Iс сети, в электрическую же энергию, требуемую двигателем и характеризуемую величинами U, I. Рис. 1.2. Энергетический канал Преобразователи бывают неуправляемыми (трансформатор, выпрямитель, параметрический источник тока) и чаще - управляемыми (мотор-генератор, управляемый выпрямитель, преобразователь частоты), они могут иметь одностороннюю (выпрямитель) или двухстороннюю (моторгенератор, управляемый выпрямитель с двумя комплектами вентилей) проводимость. В случае односторонней проводимости преобразователя и обратном (от нагрузки) потоке энергии используется дополнительный резистор R для “слива” тормозной энергии. 7 Электромеханический преобразователь ЭМП (электрический двигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию (U, I) в механическую (М, ) и обратно. Механический преобразователь (передача) - редуктор, пара винт-гайка, система блоков, кривошипно-шатунный механизм и т.п. осуществляет согласование момента М и скорости двигателя с моментом Мм усилием (Fм) и скоростью м рабочего органа технологической машины. Величины, характеризующие преобразуемую энергию, - напряжения, токи, моменты (силы), скорости называют координатами электропривода. Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном направленном изменении в соответствии с требованиями обслуживаемого технологического процесса. 1.Цели курсового проектирования 1. Формирования умений: − систематизация и закрепление полученных знаний и практических умений в процессе изучения ПМ 01 «Организация технического обслуживания и ремонта электрического и электромеханического оборудования» − проектирование принципиальных электрических схем − осуществление поиска, обобщения, анализа необходимой информации; − разработка основных этапов решения, поставленных в курсовом проекте задач. 2. Формирования общих и профессиональных компетенций: ОК 1. Понимать сущность и социальную значимость своей будущей профессии, проявлять к ней устойчивый интерес. ОК 2. Организовывать собственную деятельность, выбирать типовые методы и способы выполнения профессиональных задач, оценивать их эффективность и качество. ОК 3. Принимать решения в стандартных и нестандартных ситуациях и нести за них ответственность. ОК 4. Осуществлять поиск и использование информации, необходимой для эффективного выполнения профессиональных задач, профессионального и личностного развития. ОК 5. Использовать информационно-коммуникационные технологии в профессиональной деятельности. ОК 6. Работать в коллективе и команде, эффективно общаться с коллегами, руководством, потребителями. ОК 7. Брать на себя ответственность за работу членов команды (подчиненных), результат выполнения заданий. 8 ОК 8. Самостоятельно определять задачи профессионального и личностного развития, заниматься самообразованием, осознанно планировать повышение квалификации. ОК 9. Ориентироваться в условиях частой смены технологий в профессиональной деятельности. ОК 10. Исполнять воинскую обязанность, в том числе с применением полученных профессиональных знаний (для юношей). ПК 1.1. Выполнять наладку, регулировку и проверку электрического и электромеханического оборудования. ПК 1.2. Организовывать и выполнять техническое обслуживание и ремонт электрического и электромеханического оборудования. ПК 1.3. Осуществлять диагностику и технический контроль при эксплуатации электрического и электромеханического оборудования. ПК 1.4. Составлять отчетную документацию по техническому обслуживанию и ремонту электрического и электромеханического оборудования. 2.Задачи курсового проектирования -поиск, обобщение, анализ необходимой информации -разработка материалов в соответствии с заданием на курсовое проектирование -оформление курсового проекта в соответствии с заданными требованиями; -выполнение графической части курсового проекта; - получение навыков выбора и расчета электрических двигателей и электрических приводов, электрического оборудования; - разработки принципиальных электрических схем ручного и автоматического управления в зависимости от типа автоматизированного электропривода и типа технологического процесса; -обоснование, разработки и составления принципиальных и структурных электрических схем управления электрическими приводами сельскохозяйственных машин, машин и механизмов перерабатывающей промышленности, агрегатов и поточных линий. - получение практических навыков по основным проблемам разработки принципиальных, структурных и монтажных схем различных типов электрических приводов -подготовка и защита курсового проекта 3. Структура курсового проекта Курсовой проект состоит из трех частей: - расчетно - пояснительной записки; 9 - графической части (принципиальные электрические схемы автоматического и ручного управления электрическими приводами, структурные схемы, схемы управления и т.д.); - чертежно-графическая часть. а) Расчетно–пояснительная записка составляется на 20-25стр. листов формата А-4 машинописного текста со следующим содержанием: 1. Титульный лист 2. Задание 3. Содержание 4. Введение, в котором раскрывается актуальность и значение темы, формулируется цель. 5. Теоретические основы разрабатываемой темы. 6. Расчет и составление нагрузочной диаграммы электропривода за один цикл работы. 7. Выбор типа электродвигателя по конструктивному исполнению и по степени защиты (IP). Выбор типа передачи вращательного момента от электродвигателя к рабочей машине. 8. Расчет мощности и предварительный выбор электродвигателя в соответствии с режимами работы рабочей машины и электропривода в целом. 9. Определение приведенного к валу электродвигателя момента инерции. 10.Определение длительности запуска электродвигателя. 11.Проверка электродвигателя: - на возможности пуска электродвигателя по условиям колебания напряжения; - по тепловому режиму; - по механической перегрузке. 8. Обоснование, разработка и описание принципиальной схемы управления электроприводом. 9. Выбор аппаратуры управления и защиты электроприводом. 10. Охрана труда, окружающей среды и техника безопасности в электроустановках напряжением U≤1000В. 11.Заключение, в котором содержатся выводы и рекомендации относительно возможностей использования материалов работы. 12.Список литературы. 13.Приложения. б) Графическая часть работы должна содержать: - нагрузочные диаграммы и механические характеристики выбранного электродвигателя и рабочей машины; - принципиальная электрическая схема автоматизации электрического привода; 10 - структурная схема управления электроприводом; в) Чертежно-графическая часть составляется на 1-2 листах формата А1: 1. Принципиальная электрическая схема автоматизации электрических приводов. 2. Нагрузочная диаграмма и механические характеристики выбранного электродвигателя и рабочей машины (обязательно). 3. Технологическая схема рабочей машины (с указанием места расположения электродвигателей, пульта управления силовых щитов и т. д.) 4. ТЕМЫ КУРСОВЫХ ПРОЕКТОВ Тема 1. ВЫБОР И ОБОСНОВАНИЕ ЭЛЕКТРОПРИВОДА ВЕНТИЛЯЦИОННОЙ УСТАНОВКИ Обеспечение нормального микроклимата в помещениях осуществляется комплектными системами оборудования серии "Климат", составной частью которых являются специальные низконапорные электрические вентиляторы типа ВО и приточные отопительно - вентиляционные увлажнительные установки с трехскоростными центробежными электрическими вентиляторами. Состав комплектов электрооборудования, конструкция и прин ципы работы отдельных ее элементов, технология регулирования параметров микроклимата подробно описаны в [2,3]. Задания выполняются в соответствии с техническими данными, приведенными в таблице 1. Требования к схемам управления: Управление электроприводов дистанционное. Предусмотреть возможность выбора любой частоты вращения. Исключить возможность включения двигателя с неподвижного состояния на максимальную скорость. Иметь сигнализацию о наличии напряжения в силовой части и величине частоты вращения. Предвидеть и обосновать защиту от короткого замыкания, тепловой перегрузки электрического двигателя, самопроизвольного пуска электропривода в целом. Исходная информация о технических параметрах вентиляторов приведена в таблице №1 11 Таблица №1 Технические параметры вентиляторов 7 8 9 10 11 12 13 14 15 2,4 5,0 9,3 1,5 2,9 6,0 11,3 6,5 42 42 42 70-330 480 190 190 - 1410 900 960 1440 40 60 60 80 4,5 7,0 60-120 - 1440 80 + - 8,0 14,0 100-180 - 1440 80 - + 12, 0 18, 0 24, 0 30, 0 1,2 19,0 120-230 - 1440 80 + - 27,0 200-300 - 1440 80 - + 35,0 160-210 - 960 80 + - 48,0 100-170 - 720 60 - + 6,5 40-330 1440 2860 80 + - 2,2 6,3 60-130 - 1400 80 - + 4,5 11,0 90-130 - 1400 80 + - 9,0 17,0 - 1420 80 - + 7,0 26,0 130230 70-300 930 1440 60 + - min maх КПД вентилятора Давление при максимальный подачи, Па 6 Способ регулирования частоты вращения двигателя Измен Изме ением нение напря м жения напря жени я + + + + Максимальная 5 ВО-4 ВО-5,6 ВО-7 МЦ; №.4 МЦ; №5 МЦ; №6 МЦ; №7 МЦ; №8 МЦ; № 10 МЦ; № 12 06-320; №4 06-320; №5 06-320; №6 06-320; №7 06-320; №8 Максимальная частота вращения вентилятора Минимальная 1 2 3 4 Тип вентиляора № Варианта Подача, /с 12 Продолжение таблицы №1 16 06-320; №10 17 06-320; №10 18 МЦ; №.4 19 МЦ; №5 20 МЦ; №6 21 МЦ; №7 22 МЦ; №8 23 МЦ; № 10 24 МЦ; № 12 25 06-320; №4 26 06-320; №5 27 06-320; №6 28 06-320; №7 29 06-320; №8 30 06-320; №10 15, 34,0 110…22 0 0 26, 61,0 160…34 0 0 1,5 6,5 70…33 0 4,5 7,0 60…12 0 8,0 14,0 100…18 0 12, 19,0 120…23 0 0 18, 27,0 200…30 0 0 24, 35,0 160…21 0 0 30, 48,0 100…17 0 0 1,8 6,5 40…33 0 2,2 6,3 60…13 0 4,0 11,0 90…13 0 8,0 17,0 130…23 0 8б 26,0 70…30 5,0 0 12, 34,0 110…22 5 0 - 950 80 - + - 980 80 + - - 1440 80 - + - 1440 80 + - - 1440 80 - + - 1440 80 + - - 1440 80 - + - 960 80 + - - 720 60 - + 1650 2860 80 + - - 1400 80 - + - 1400 80 + - - 1420 80 - + 1340 1440 60 + - - 950 80 - + Тема 2. Расчет и выбор электропривода насосной установки и составление принципиальной и структурной схем управления Оросительная система представляет собой систему агрегатов, состоящие из осевых насосов и асинхронных электрических двигателей, которые подают воду в оросительные системы. В соответствии с технологическими условиями запуск насоса необходимо осуществить на закрытую задвижку, которая установлена на напорном трубопроводе. 13 Для питания двигателя установки применяется кабель типа КРПТ. Технические параметры осевых насосов приведены в таблице № 3, а технологические условия подачи воды в оросительную систему приведены в таблице. 3 Таблица 2 Технические данные осевых насосов № п/ п. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 Марка насоса Номин напор,,м 0.5-47,1 0.5-47,2 0.5-47,3 0.5-47,4 0.5-47,5 0.5-47,6 0.5-55,1 0.5-55,2 0.5-55,3 0.5-55,4 0.5-55,5 0.5-55,6 0.5-47,4 0.5-47,5 0.5-47,6 0.5-55,1 0.5-55,2 0.5-55,3 0.5-55,1 0.5-55,2 0.5-55,3 0.5-55,4 0.5-55,5 0.5-55,6 0.5-47,4 0.5-47,4 0.5-47,5 0.5-47.6 0.5-55,1 0.5-55,2 0.5-55,3 0.5-55,4 5,5 5,8 6,2 7,8 8,4 9,5 11,8 12,6 14,5 14,8 15,7 16,8 7,8 8,4 9,5 11,8 12,6 14,5 11,8 12,6 14,5 14,8 15,7 16,8 7,8 8,4 9,5 11,8 12,6 14,5 12,6 14,5 Произ Частота Мощност вод. вращ, ь на валу, 3 м /ч n, об/мин кВт 1825 730 32 2090 730 35 2450 730 50 2580 960 68 2660 960 107 2780 960 112 3250 730 120 3450 730 131 3580 730 135 3690 960 145 3750 960 157 3980 960 170 2580 960 68 2660 960 107 2780 960 112 3250 730 120 3450 730 131 3580 730 135 3250 730 120 3450 730 131 3580 730 135 3690 960 145 3750 960 157 3980 960 170 2580 960 68 2660 960 107 2780 960 112 3250 730 120 3450 730 131 3580 730 135 3450 730 131 3580 730 135 КПД, Диам. η,% колеса, м 80 0.47 80 0.47 85 0.47 86 0.47 86 0.47 86 0.47 85 0.55 85 0.55 85 0.55 85 0.55 85 0.55 85 0.55 86 0.47 86 0.47 86 0.47 85 0.55 85 0.55 85 0.55 85 0.55 85 0.55 85 0.55 85 0.55 85 0.55 85 0.55 86 0.47 86 0.47 86 0.47 85 0.55 85 0.55 85 0.55 85 0.55 85 0.55 14 № п/ п. 1 1 2 3 4 5 6 7 8 9 10 11 12 Таблица 3 Технологические условия подачи воды в оросительную систему Марка Необход. Длина Тип и сечение Мощнос Продолжитель насоса объмы кабеля кабеля, ть ТП, ность. паузы в 3 2 воды, м , м мм кВА работе системы, мин 2 3 4 5 6 7 8 0.5-47,2 550 250 4х16 63 25 28 620 680 0.5-47,1 450 340 4х16 63 24 32 550 600 0.5-47,3 450 200 4х16 100 18 22 650 700 0.5-47,4 550 250 4х25 100 26 32 630 720 0.5-47,5 610 280 4х25 140 28 30 690 740 0.5-47,6 750 320 4х35 140 24 22 820 880 0.5-55,1 900 220 4х35 163 28 34 980 1050 0.5-55,2 920 320 4х35 163 25 30 990 1060 0.5-55,3 940 325 4х50 200 28 34 1000 1080 0.5-55,4 950 360 4х50 200 30 32 990 1090 0.5-55,5 880 370 4х50 200 26 34 950 1050 0.5-55,6 980 4х50 4х50 200 28 32 1020 1100 15 № п/ п. Марка насоса 13 0.5-47,4 14 0.5-47,5 15 0.5-47,6 16 0.5-55,1 17 0.5-55,2 18 0.5-55,3 19 0.5-55,3 20 0.5-47,3 21 0.5-47,4 22 0.5-47,5 23 0.5-47,6 24 0.5-55,1 25 0.5-55,2 26 0.5-47,4 Необход. Длина Тип и сечение Мощнос Продолжитель объмы кабеля кабеля, ть ТП, ность. паузы в 3 2 воды, м , м мм кВА работе системы, мин 550 280 4х25 100 26 32 630 720 610 260 4х25 140 28 30 690 740 750 270 4х35 163 24 22 820 880 900 350 4х35 163 28 34 980 1050 920 340 4х35 200 25 30 990 1060 940 380 4х50 200 28 34 1000 1080 940 380 4х50 200 28 34 1000 1080 450 200 4х16 100 18 22 650 700 550 250 4х25 100 26 32 630 720 610 280 4х25 140 28 30 690 740 750 320 4х35 140 24 22 820 880 900 220 4х35 163 28 34 980 1050 920 320 4х35 163 25 30 990 1060 550 280 4х25 100 26 32 16 № п/ п. Марка насоса 27 0.5-47,5 28 0.5-47,6 29 0.5-55,1 30 0.5-55,2 31 0.5-55,3 32 0.5-55,4 Необход. Длина Тип и сечение Мощнос Продолжитель объмы кабеля кабеля, ть ТП, ность. паузы в 3 2 воды, м , м мм кВА работе системы, мин 630 720 610 260 4х25 140 28 30 690 740 750 270 4х35 163 24 22 820 880 900 350 4х35 163 28 34 980 1050 920 340 4х35 200 25 30 990 1060 940 380 4х50 200 28 34 1000 1080 940 380 4х50 200 28 34 1000 1080 5.ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ ПРОЕКТА ВВЕДЕНИЕ Во введении следует обосновать актуальность избранной темы курсового проекта, раскрыть ее теоретическую и практическую значимость, сформулировать цели и задачи работы. Во введении, а также в той части работы, где рассматривается теоретический аспект данной проблемы, автор должен дать, хотя бы кратко, обзор литературы, изданной по этой теме. Введение состоит из обязательных элементов, которые необходимо правильно сформулировать. В первом предложении называется тема курсового проекта. Актуальность исследования рассматривается с позиций практической значимости. В данном пункте необходимо раскрыть суть исследуемой проблемы и показать степень ее проработанности в различных информационных источниках. Далее во введении определяется цель работы. Структура работы – это завершающая часть введения, в которой перечисляются структурные части проекта, например: «Структура проекта соответствует логике разработке темы и включает в себя введение, 17 теоретическую часть, практическую часть, заключение, список литературы, приложения». Краткие комментарии по формулированию элементов введения представлены в таблице 4. Таблица 4 Комментарии по формулированию элементов введения Элемент Комментарий к формулировке введения Актуальность Раскрыть суть исследуемой проблемы и показать темы степень ее проработанности в информационных источниках. Цель Должна заключаться в решении поставленной в исследования задании задачи путем ее анализа и практической реализации. Объект Дать определение явлению или проблеме, на которое исследования направлена исследовательская деятельность. Задачи работы Определяются исходя из целей работы и в развитие поставленных целей. Формулировки задач необходимо делать как можно более тщательно, поскольку описание их решения должно составить содержание глав и параграфов работы. Рекомендуется сформулировать 3 – 4 задачи. Структура Краткое изложение перечня и/или содержания глав работы проекта. (завершающая часть введения) Теоретические основы разрабатываемой темы. Для правильного выбора электропривода при автоматизации производственных процессов особое значение имеет выбор электроприводов, которые соответствуют механическим, технологическим, кинематическим, энергетическим, нагрузочным, инерционным характеристикам рабочих машин. При выборе мощности и типа двигателя, а также аппаратуры управления решающую роль играет характер нагрузки рабочей машины. В настоящее время все встречающиеся режимы нагрузок производственных машин и механизмов по ГОСТу 183- 66 делятся на 8 видов: 1) продолжительный (S1); 2) кратковременный (S2); 3) повторно-кратковременный (S3) с продолжительностью одного цикла, если нет других указаний, равной 10 мин; 4) повторно-кратковременный с частыми пусками (S 4); 18 5) повторно-кратковременный с частыми пусками и торможением (S5); 6) перемежающийся (S6) с продолжительностью одного цикла, если нет других указаний, равной 10 мин; 7) перемежающийся с частыми реверсами при электрическом торможении (S7); 8) перемещающийся с двумя или более скоростями вращения (S8). При проектировании различных типов двигателей ориентируются на определенные режимы работы. В соответствии с ГОСТом 183—66 продолжительным номинальным называется такой режим работы электрического двигателя, при котором рабочий период настолько велик, что превышение температуры всех частей электродвигателя при неизменной температуре охлаждающей среды достигает практически установившихся значений. Номинальной мощностью при продолжительной работе называется мощность, которую двигатель может отдавать в течение произвольно долгого времени. При этом конечная температура отдельных частей двигателя не должна превышать установленные пределы. Если на щитке двигателя при указании мощности нет особого указания, то за номинальную принимают мощность двигателя при продолжительной работе. Продолжительная работа характерна для большинства сельскохозяйственных электроприводов. Молотилки, зерноочистительные машины, сортировки, мельничные постава, силосорезки, большинство станков в ремонтных мастерских, насосы, вентиляторы работают длительно без остановки. Кратковременным номинальным режимом работы (S 2) электродвигателя называется такой режим, при котором периоды неизменной номинальной нагрузки чередуются с периодами отключения двигателя; при этом периоды неизменной номинальной нагрузки не настолько длительны, чтобы превышения температуры всех частей двигателя при практически неизменной температуре охлаждающей среды могли достигнуть практически установившихся значений, а периоды остановки двигателя настолько длительны, что все части его приходят в практически холодное состояние. Задачами работы являются: обоснование режимов работы электропривода, выбор мощности, аппаратуры управления и защиты, составление принципиальных электрических схем подключения и управления для разных режимов работы электроприводов для различных производственных процессов. 19 ГЛАВА 1. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ЭЛЕКТРИЧЕСКИМ ПРИВОДАМ 1.1.ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ЭЛЕКТРОПРИВОДАМ Т е х н о л о г и ч е с к и е х а р а к т е р и с т и к и изображают в виде технологических схем. Они определяют требования к электроприводу со стороны качества продукции (допустимые колебания скорости, удельные расходы энергии, необходимость регулирования режимов работы, возможность и необходимость автоматизации) и условия работы электропривода в зависимости от характера окружающей среды, рода помещения (сухое, сухое неотапливаемое, сырое, пожароопасное, взрывоопасное и т д). К и н е м а т и ч е с к и е с х е м ы дают представление о траекториях и скоростях движения всех элементов машин, а также о путях распределения энергетического потока от двигателя. Э н е р г е т и ч е с к и е х а р а к т е р и с т и к и - показывают общий объем энергопотребления (кВтч) и удельное энергопотребление (кВтч) на единицу продукции и расход электрической энергии на выполнение технологического процесса, а также распределение энергии между отдельными узлами машины. М е х а н и ч е с к и е х а р а к т е р и с т и к и , определяют зависимость установившейся скорости машины от момента сил сопротивления. Они могут быть изображены графически рис.(1.3) или описаны аналитически уравнениями типа (1). M C = M 0 + ( M CH − M 0 ) ( n x ) nn (1) где: Мс- момент сопротивления производственного механизма при угловой скорости ω; Мо-момент сопротивления трения в движущихся частях машины, принимаемый постоянным при неподвижном состоянии рабочей машины; МСН - момент сопротивления рабочей машины при номинальной угловой скорости ωН; х- показатель степени, характеризующий изменение момента сопротивления при изменении угловой скорости; для типичных машин может принимать значения: 0,1.2;-1 При х=0 момент сопротивления не зависит от угловой скорости и определяется в основном моментом трения. Такой характеристикой обладают подъемные краны, лебедки, транспортеры, вакуум-насосы, поршневые насосы, механизмы подачи металлорежущих станков и других сельскохозяйственных машин. При х=1 момент сопротивления в основном линейно возрастает с увеличением скорости. Такой характеристикой обладают глиномялки и льномялки под нагрузкой, генератор с независимым возбуждением, 20 работающий на постоянное внешнее сопротивление, зерноочистительные машины, корнеклубнемойки на холостом ходу, пресс ПСМ-5А на холостом ходу. При х=2 момент сопротивления в основном пропорционален квадрату скорости. Такой характеристикой обладают вентиляторы и поэтому они называются «вентиляторные характеристики», центробежные насосы, молотильные барабаны, сепараторы. При х= -1 момент сопротивления уменьшается обратно пропорционально угловой скорости. Такой характеристикой обладают некоторые металлообрабатывающие станки, зерновые нории под нагрузкой. Механические характеристики используются при анализе переходных процессов, режимов работы машины совместно с электродвигателем, определении возможности пуска и устойчивой работы электропривода, построении нагрузочных диаграмм. Н а г р у з о ч н ы е д и а г р а м м ы м а ш и н показывают зависимости момента Мс, мощности Рс сопротивлений и угловой скорости сом рабочей машины от времени; Мс(1), Рс(1), ω(t) и отражают характер и режим работы электропривода. Нагрузка рабочей машины может быть постоянной и переменной. С постоянной нагрузкой работают вентиляторы и центробежные насосы при постоянных производительности и напоре, зерновые элеваторы, когда неизменны подача и угловая скорость, сепараторы. С переменной нагрузкой работают машины, в которые перерабатываемая масса поступает неравномерно (дробилки, молотильные и комбайновые барабаны), а также машины, у которых скорость рабочих органов переменна (например, поршневые насосы, поршневые прессы, лесопильные рамы). В связи с выбором маховикового электропривода профессором Г. И. Назаровым предложено разделять нагрузочные диаграммы рабочих машин с переменной нагрузкой по характеру нарастания момента на две основные группы: ударная нагрузка с мгновенным рис. (1,б,.д) и пульсирующая с плавным рис. (1,в,м) нарастанием моментов сопротивления. По отношению максимального момента Мг к среднему Мср различают слабопеременную (М1/Мср< 1,4), умеренно-переменную (М1/Мср = 1,4. . .2) и резко-переменную (М1/Мср'>2) нагрузки. В случае слабопеременной нагрузки вопрос о маховиковом приводе может возникнуть только при повышенных требованиях к степени неравномерности работы. Для умеренно-переменной нагрузки вопрос о маховиковом приводе решают каждый раз в зависимости от конкретных условий. При резко-переменной нагрузке выбирают маховиковый электропривод. Нагрузочные диаграммы а.,е, з, к, м, рис.(1.4) могут быть отнесены к перемежающемуся режиму работы, если М2 равен моменту холостого хода машины Мх.м. И н е р ц и о н н ы е х а р а к т е р и с т и к и определяют значение и характер изменения момента инерции подвижных частей машины. У машин с вращательным движением рабочих органов момент инерции — величина постоянная. 21 У машин со сложным движением отдельных органов (с возвратнопоступательным у лесопильных рам, компрессоров, M 8 1.0 1 0.8 2 4 0.6 3 7 0.4 6 5 n 0.2 0 Рис.1.3. Приведенные и приводные характеристики рабочих машин М1 М1 М М4 М5 М ср М6 t М0 t М3 а б М1 М4 М2 М0 М1 М ср М3 t.c в М2 г t.a М1 М ср М1 М ср М2 М2 М ср t.c t.c д е Рис. 1.4. Механические характеристики различных рабочих машин и механизмов сено- соломо- прессов) момент инерции - величина переменная. Значение и степень изменения момента инерции обычно используют при определении продолжительности пуска и оценке равномерности хода машины при работе. Постоянный момент инерции рабочей машины JМ.ПР приведенный к валу ротора двигателя с моментом инерции JР увеличивает приведенный момент инерции привода, который характеризуется коэффициентом инерции привода и который определяется согласно (2), а сила инерции определяется согласно уравнению (3). (2) J Пр = J Р + J М.Пр FJ = J P + J M . ПР JP (3) 22 Коэффициент инерции изменяется в широких пределах от величины, близкой к единице для приводов машин с JМ.ПР < JР до 25 у приводов кормо-дробилок и до FJ ≥ 100 у приводов центрифуг. Пропорционально FJ увеличивается и время пуска и остановки привода. Приводные характеристики рабочих машин взаимосвязаны и характеризуют одну и ту же машину с разных точек зрения. Общим для них являются требования технологического процесса и рабочей машины к приводу. Поэтому во всех случаях необходимо знать свойства рабочей машины и учитывать их при выборе электропривода. 1.2. УСЛОВИЯ РАБОТЫ ЭЛЕКТРОПРИВОДОВ. Помимо приводных характеристик машин, для выбора рационального электропривода необходимо учитывать условия окружающей среды и электроснабжения. Ряд сельскохозяйственных помещений отличается высоким содержанием химически активных веществ в сочетании с высокой влажностью окружающей среды запыленностью. Кроме того, электродвигатели часто работают на открытом воздухе, подвергаясь непосредственному воздействию атмосферных влияний. Наиболее агрессивное включение атмосферы помещений — аммиак, содержание которого в животноводческих помещениях колеблется в широких пределах (в свинарниках — 0,2. . .0,04, в коровниках — 0,05. . .0,018 мг/л при максимуме в ночные часы). Относительная влажность достигает 90. . .98%. Сероводород в помещениях находится в малом количестве (0,001 мг/л). Углекислый газ, взаимодействуя с водой, образует слабую неустойчивую кислоту, существенно не влияющую на изоляцию, но усиливающую коррозию металлов. При таких тяжелых условиях окружающей среды и малом числе часов работы в сутки, когда двигатели не успевают «самоосушиться», сопротивление изоляции электрооборудования быстро снижается. Поэтому электрооборудование для животноводческих помещений должно быть рассчитано на работу в среде с относительной влажностью до 90. . .100% при содержании паров аммиака до 0,2 мг/л. Иногда питание сельскохозяйственных электроприводов осуществляется от маломощных источников электроснабжения. К ним относят автономные электростанции и подстанции, мощность которых соизмерима с мощностью электродвигателей, и источники с сопротивлением питающих линий, соизмеримым с сопротивлением короткого замыкания электродвигателей. В этих случаях при пуске электродвигателя наблюдается значительное снижение напряжения, влияющее на работу потребителей и прежде всего асинхронных электродвигателей, у которых уменьшаются пусковой и максимальный моменты, что может привести к невозможности разбега пускаемого и остановке работающих двигателей. 23 Поэтому при выборе электропривода и источника питания необходимо учитывать пусковые режимы и их влияние на устойчивость работы ранее подключенных двигателей и других потребителей. 1.3. ПРОВЕРКА ВОЗМОЖНОСТИ ПРЯМОГО ПУСКА АСИНХРОННОГО КОРОТКОЗАМКНУТОГО ДВИГАТЕЛЯ Отклонение напряжения (U Ф ) на зажимах двигателя при пуске от трансформатора определяется согласно (4). (4) U Ф = ( zT + z Л ) /( zT + z Л + z Д ) где: zТ - полное сопротивление короткого замыкания трансформатора, Ом; ZЛ - полное сопротивление соединительной линии, Ом, ZД- полное сопротивление короткого замыкания асинхронного двигателя, Ом При пуске двигателя от генератора соизмеримой мощности zТ в формуле (4) заменяют на z г , что соответствует уравнении (5). zТ = zг = UН/ IНГ*k (5) где к— отношение тока короткого замыкания генератора к трансформатору. Нагрузка, включенная параллельно электродвигателю, также влияет на потерю напряжения. В этом случае для подсчета отклонения напряжения в формулу (4) вместо сопротивление двигателя zД следует подставлять эквивалентное сопротивление параллельно включенных двигателя и нагрузки и аналитически рассчитывается согласно (6). (6) z ЭКВ = ( z Д z Н ) /( z Н + z Д ) В формуле (1.3) коэффициент мощности для всех сопротивлений принят одинаковым. Подсчет отклонения напряжения с учетом коэффициента мощности электродвигателя и параллельной нагрузки для одного, двух, трех и четырех фидеров и составление номограмм рис. (1. 5). Приведенные расчеты проведены в относительных единицах, за базу величины приняты напряжения трансформатора U1=1.05;U1=1 и мощность S=1. Сопротивление параллельного включенного электродвигателя и нагрузки определяется с учетом средних значений коэффициентов мощности и Cos K1 = 0.8 исходя из аналитического выражения (7). (7) Z1 = Z Д 1 + z 2Д / z N2 1 + 2( z L / zY 1 ) cos( k1 − Н 1 ) Пусковая мощность двигателя и мощность нагрузки определяется соответственно приведены к мощности трансформатора SТ и напряжению вторичной обмотки: 2 U SД S = 1.1 Д S Д = 2 U SТ Д SТ (8) 24 2 U S S S H1 = 2 H 1 = 1.1 H 1 U SТ Д SТ (9) Напряжение на двигателе при пуске, отнесенное к базовому и номинальному значению, определяется согласно (10). 400 U Д = U Д/ 380 400 z1 380 z 2 или U Д = U 2 (10) Из приведенных уравнений следует, что отклонение напряжения (U Ф ) на зажимах асинхронного электрического двигателя при его пуске определится как отклонение напряжения на зажимах электродвигателя (11) U Д = 1 − U Д Пуск электропривода рабочей машины возможен при условии выполнения неравенство (12) при условии, что исходная информация известна. U Д2 П ТР + ИЗБ (12) Зная по каталогу значение μП по механической характеристике машины μТР определяют допустимое отклонение напряжения на электрическом двигателе, которое необходимо сопоставить со значением определенное по уравнении (13) или по соответствующих номограмм представленные на рис. (1.6). U Д.Доп = 1 − (ТР + 0.25) / П (13) При выполнении условий U Ф U Д.Доп и ∆ Uф < ∆ UД.Доп, то в таком случае пуск обеспечен. ZH2 ZT U1 Z H1 ЭП U2 Z2 Uz Рис. 1.5. Схемы низковольтной сети от которой питается электрической энергии проектируемый электропривод 25 U д % U д % 56 56 49 49 40 40 0.50 0.40 0.30 32 32 0.5 0.4 24 24 16 0.2 Z 3 5 4 0.50 0.30 16 Z 3 1.00 00.6 U д % 56 56 49 49 40 40 32 32 24 24 16 16 5 4 00.6 0.60 0.32 Z A = 0.24 0.5 0.4 Z 3 4 5 0.2 Z 3 4 5 Рис.1.6. Принципы определения потери напряжения на зажимах пускаемого электродвигателя по номограммам при одной номограмме (а), двух номограммах (б), трех номограммах (в) и четырех номограммах (д) питающих линиях. 26 Г л а в а 2. ЭЛЕКТРИЧЕСКИЙ ПРИВОД И АВТОМАТИЗАЦИЯ НАСОСНЫХ УСТАНОВОК 2.1. Выбор типа и мощности электрического привода водоснабжающей установки Современные системы водоснабжения механизированных животноводческих ферм отличает высокая степень автоматизации. Автоматически управляемые электродвигатели приводов водокачек и автопоилки на фермах позволяют подавать воду к потребителю в необходимом количестве без непосредственного участия человека. Для того чтобы выбрать тип и мощность электропривода насосной установки и их число, необходимо исходить из местных условий решить вопрос о схеме водоснабжения. Подачу воды на животноводческие фермы осуществляют в основном через водонапорный котел или водонапорный бак с приводом центробежных насосов от асинхронных двигателей. Непосредственная подача воды от насоса в распределительную сеть осуществляется в открытых оросительных системах с приводом от асинхронных или синхронных двигателей. Для непосредственной подачи воды на животноводческих фермах разрабатываются комплекты электрооборудования для автоматизации сельскохозяйственного водоснабжения с саморегулированием подачи воды при питании от статических преобразователей частоты, а также от электропривода с использованием электромагнитных муфт скольжения. Для принятой схемы водоснабжения выбирают насос (в большинстве случаев надежный и простой в эксплуатации насос центробежного типа). Подачу Q (л/ч) насоса находят из соотношения (14). QH = QMAKЧ = кЧ к СУТ QСр.Сут 24 qn (14) где: Qмак..ч.- возможный максимальный часовой расход воды, л/ч; кч. коэффициент неравномерности часового расхода (для поселка кч.,= 1,5...2,5, для фермы с автопоилками кч-2...3, для фермы без автопоилок кч. =4...5); ксут- коэффициент неравномерности суточного расхода (1,1...1,3); η - КПД установки, учитывающий потери воды (0,9); Q ср.сут - среднесуточный расход воды, л/сут; q* — норма воды на одного 1-го потребителя (корова, свинья, птица, технологический процесс, автомобиль), л/сут; п- число потребителей данного вида. При расчете водоснабжения особо учитывают пожарный расход воды (2,5. . .10 л/с) в зависимости от размеров хозяйства или населенного пункта, длительность пожара принимается равной 2-3ч. Этот расход обязан обеспечить насосный агрегат, и водопроводная сеть или на него должна быть рассчитана запасная емкость. 27 Напор насоса выбирают таким, чтобы он мог подавать воду при необходимом давлении в заданную точку. Требуемый напор насоса Нтр определяется высотой всасывания Нвс. и высотой нагнетания ННГ сумма, которых определяется статическим напором НС с учетом потерями напора в трубопроводах Н и разностью давлений на верхнем Рву и нижнем Рн,у уровнях. Для центробежных насосов особенно важен правильный выбор угловой скорости насоса, так как его производительность пропорциональна угловой скорости, напор и момент — квадрату угловой скорости, мощность - ее кубу: 2.2. Выбор технических параметров насосной установки и обоснование условий работы насосной установке Насосная станция второго подъема предназначена для обеспечения водой для орошения сельскохозяйственных угодий. Учитывая климатические условия и возможные засухи, такие как в 2007г, то орошение сельскохозяйственных угодий становится одно из важнейших государственных программ развития народного хозяйства. Насосная станция второго подъема оборудована основными насосами три, а практически работает один, а два насоса находятся в резерве и один вспомогательный насос, который служит для заполнения и создания давления в водопроводе для запуска основного насоса. Мощности и принципиальные схемы насосов идентичны, поэтому расчеты в курсовом проекте выполняются для одного основного насоса и для вспомогательного насоса, а для остальных насосов расчеты идентичны. Технические параметры, которые положены в основу проведенных расчетов, приведены в таблицах 3 и 4. Г л а в а 3. ОБОСНОВАНИЕ И ВЫБОР ТИПА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ И СТЕПЕНЬ ЗАЩИТЫ (IP). Исходя из первоначальных условий технологического процесса учитывая режимы работы насосных установок, то для их функционирования в проекте предлагается использовать трехфазные асинхронные двигатели серии-4А. Трехфазные асинхронные двигатели серии-4А обладают рядом преимуществ по сравнению и другими электродвигателями. Трехфазные асинхронные двигатели серии-4А используемые в насосных установках снабжены системой защиты типа IP–44. Исходя из этих первоначальных положениях для проектируемой насосной установки предлагается использовать трехфазные асинхронные двигатели серии-4А со системой защиты типа IP – 44. 28 3.1. Обоснование и выбор типа передачи вращательного момента от электродвигателя к насосу Для передачи вращательного момента от трехфазного асинхронного электродвигатели серии-4А используемые в насосных установках к самим насосам в проекте предлагается использовать соосную передачу с соединением валов насоса и электродвигателя при помощи муфтового соединения. Такое соединение в электроприводах используется в таких случаях, когда номинальное число оборотов рабочей машины совпадает с номинальным числом оборотов выбранного трехфазного асинхронного электродвигателя. Исходя из вышеизложенного, в проекте предлагается использовать соосный электропривод с соединением трехфазного асинхронного электродвигателя с насосной установкой через муфту. 3.2. Расчет и построение нагрузочных диаграмм электродвигателя Режим работы основного насоса определяется исходя из минимального необходимого объема перекачке воды с учетом перерывов в процессе работы. 3.2.1. Расчет мощности электродвигателя для основного насоса. Режим работы основного насоса определяется исходя из минимального необходимого объема перекачке воды с учетом перерывов в процессе работы. Исходя из технических параметров и режима работы основного электрического двигателя, выбирается режим работы S3, мощность которого определяется аналитически из уравнении (15). PH = (H + H ) Q 102 p tr (15) где: H – давление водяного столба, (манометрическая высота водяного столба), м; ΔH – дополнительное давление, связанное с потерями в трубопроводе, м; Q – производительность насоса, м3/сек; γ – плотность воды , kг/м3 (γ = 1050 kг/м3); ηtr – коэффициент полезного действия передачи, (ηtr = 0.99); ηp – коэффициент полезного действия насоса; ηН=0,4 Подставляя численные значения в уравнении (3.1) получится соответствующие численные значения. Примечание: Способ передачи вращательного момента от электрического двигателя к насосу выбирается при помощи муфты и для такой передачи коэффициент полезного действия передачи, (ηtr = 0.99). В соответствие с таблицей 5 выбирается резервный коэффициент передачи к, для всей установки в целом. 29 P, kВт K 1 2…1,7 2 1,5 3 1,33 4 1,25 5 1,2 Таблица 5 8 10 1,12 1,1..1,05 Определяется расчетная мощность установки с учетом резервного коэффициента передачи к в соответствие с уравнением (16) PЭД = к РН (16) 3.2.2. Расчет мощности электродвигателя для вспомогательного насоса Режим работы вспомогательного насоса определяется исходя из минимального необходимого объема перекачке воды с учетом перерывов в процессе работы. Исходя из технических данных работы основного двигателя, выбирается режим S2, мощность которого определяется в соответствие с аналитически уравнением (15). Подставляя численные значения в (15) получится численное значение мощности электрического двигателя. Способ передачи вращательного момента от электрического двигателя к насосу выбирается при помощи муфты и для такой передачи коэффициент полезного действия передачи, (ηtr = 0.99). В соответствие с таблицей 5 выбирается резервный коэффициент передачи к, для всей установки в целом и определяется мощность вспомогательного насоса согласно (16). 3.3. Определение продолжительности работы электроприводов Продолжительности работы электроприводов определяется с учетом минимального необходимого объема перекачки воды основным насосом с учетом производительности насоса. Продолжительности работы основного насоса определяется исходя из минимально необходимого объема перекачке воды с учетом перерывов в процессе работы в соответствии с уравнением (17). (17) t = VМин / Q где:VMin - минимально необходимый объем перекачке воды с учетом перерывов в процессе работы, Q- производительность насоса, м3/сек. Действительное продолжительности работы основного насоса определяется исходя из необходимых объемов перекачки воды согласно выражении (17). Продолжительность перерыва основного насоса соответственно составляют аналитические значения, определяемые согласно (17). 30 Нагрузочная диаграмма основного насоса приведена на рис.(1.7). P, kВт t1 t3 t5 t2 t4 t, мин Рис.1.7. Нагрузочная диаграмма основного насоса 3.4. Обоснование режима работы основного насоса Обоснование режима работы, расчет и предварительный выбор мощности и типа трехфазного асинхронного электрического двигателя основного насоса проводится исходя из условия режим работы насосной установки. Режим работы основного насоса определяется исходя из минимального необходимого объема перекачке воды с учетом перерывов в процессе работы с учетом тепловых режимов. Исходя из технических данных работы основного двигателя, выбирается режим S3, мощность которого определяется аналитически при помощи уравнении (18). P t P = t 2 i экв i (18) i Подставляя значения мощностей и продолжительности работы с учетом продолжительности перерывов в (18) получится численное значение эквивалентной мощности согласно (19). P t + P2 t3 + P3 t5 Pэкв = 1 1 t1 + t3 + t5 + 0,5(t 2 + t 4 ) Исходя из полученных аналитических данных для выполнения технологического процесса в полном объеме, выбирается согласно [4] трехфазный асинхронный электродвигатель марки 4A 250 C2 Y3. 2 2 2 31 Исходя из [4] выбирается трехфазный асинхронный электродвигатель марки 4A 250 C2 Y3 со следующими заводскими техническими паспортными данными: Основные характеристики трехфазного асинхронного электродвигателя марки 4A 250 C2 Y3 приведены в таблице 6, а его технические параметры приведены в таблице 6. Таблица 6 Технические параметры трехфазного асинхронного электродвигателя марки 4A 250 C2 Y3 Р, кВт η m,kг Сos j,A/mm2 Iпуск 75 0,91 0,89 4,4 7,5 470 Iном sн, % 1,4 sк, % 10,0 λзап 1,2 λмах 2,0 λкрит 2,5 Продолжение Таблицы 6 пр.пус.,сек 0,87 3.4.1. Обоснование режима работы вспомогательного насоса Обоснование, расчет и предварительный выбор мощности трехфазного асинхронного электрического двигателя для вспомогательного насоса производится исходя из условия режим работы насосной установки в целом и вспомогательного насоса в частности. Режим работы основного насоса определяется исходя из минимального необходимого объема перекачке воды с учетом перерывов в процессе работы. Исходя из технических данных работы основного насоса и двигателя выбирается режим S3, мощность которого рассчитывается аналитически при помощи уравнении (19) с учетом теплового режима работы вспомогательного двигателя. PН PК . Р м (19) где: PН – номинальная мощность электрического двигателя PК.Р.- номинальная мощность электрического двигателя; при кратковременным режиме работы двигателя. m -предельно допустимая тепловая перегрузка. Подставляя численные значения в (19) получится численное значение мощности электрического двигателя вспомогательного насоса Предельно допустимая тепловая перегрузка определяется из выражении (20). м = ( + 1) t − (20) где: t - коэффициент тепловой перегрузке; = 0,75 – для электрических двигателей постоянного тока; = 0,5...0,7 – для асинхронных электрических двигателей переменного тока; 32 = 1,5...2 – для синхронных двигателей переменного тока; Подставляя численные значения в уравнение (20) получится численное значение m = (0,6 + 1) 4,16 − 0,6 = 6,65 − 0,6 = 2,46 Коэффициент тепловой перегрузке аналитически рассчитывается согласно уравнению (21). kTP = 1 1− e (21) −t s . d . T где: ts.d. – продолжительность работы двигателя в кратковременном режиме; сек (10 мин = 600сек); T – постоянная нагрева электродвигателя при заданной номинальной угловой скорости =const, сек; (30мин =1800 сек). e – натуральное число; е=2,72. Подставляя численные значения в (3.7) получится численное значение 1 kTP = 1 − 2,3 −600 1800 = 1 1 = = 4,16 1 − 0,75 0,25 Исходя из полученных аналитических данных для выполнения технологического процесса в полном объеме выбирается трехфазный асинхронный электрический двигатель марки 4A 71 Б2 Y3 согласно [4]. Исходя из [4] выбирается трехфазный асинхронный электрический двигатель марки 4A 71 Б2 Y3 с паспортными данными: Паспортные данные трехфазного асинхронного электрического двигателя марки 4A 71 Б2 Y3 приведены в таблице 7. Таблица 7 Технические параметры трехфазного асинхронного электродвигателя марки 4A 71Б2Y3 Р, кВт η m,kг Сos j,A/mm2 Iпуск 1.1. 0,775 0,87 8,5 5,5 15,1 Iном Продолжение таблицы 7 sн, % 3,9 sк, % 5,5 λзап 2,0 λмах 2,8 λкрит 2,2 пр.пус.,сек 0,08 б) Выбор электродвигателя вспомогательного насоса исходя из минимального пускового рабочего механического момента Определение минимального пускового рабочего механического момента вспомогательного насоса и механический момент 33 вспомогательного электродвигателя производится исходя из выражении (22). МН≥ kM0 мин *U 2 (22) где Mn – номинальный механический момент электрического двигателя, Нм; k – коэффициент ускорения запуска электродвигателя и находится в пределах (k=1,15...1,25); M0 – пусковой механический момент электрического двигателя, Нм; min - соотношение между пусковым и номинальными моментами электрического двигателя припуске; U – номинальное напряжение питающей сети, В; Подставляя численные значения в (22) получится численное значение соответствующих механических моментов. M0=0,25*Mn; P nn Mn=9550 * n =9550* Нм M 0 = 0,25 3,62 = 0,9 Нм Mn 1,2 0,9 1,08 = = 0,27 Нм 2 2,5 1,25 3,9 в) Выбор электродвигателя вспомогательного насоса исходя из максимальной перегрузки. Определение мощности электродвигателя вспомогательного насоса исходя из максимальной перегрузки производится исходя из выражении (23). PН.М PРАс . k = 2,72 = 0,49 kВт 5,5 (23) где:k-коэффициент соотношения между пусковым и номинальным рабочим током электрического двигателя, для вспомогательного электродвигателя, согласно паспортным для трехфазного асинхронного электродвигателя марки 4A 71 Б2 Y3. к=5,5. 3.5. Определение приведенного момента инерции к валу электродвигателя. Для цилиндрических объектов, вращающихся вокруг собственной оси определяется приведенный момент инерции. Для определения собственного момента инерции для основного элетропривода насосной установки приведенный момент инерции определяется исходя из выражении (24). J1= L 2 (R r ) , Н*м2 4 4 (24) 34 где: =3,14; - плотность материала из которого выполнен электродвигатель (сталь-Э-342) , (7800 kг/м3); L – длина статорного цилиндра электрического двигателя, м; R – внешний радиус цилиндра электрического двигателя, м; r – внутренний радиус цилиндра электрического двигателя, м; Подставляя численные значения согласно паспортным данным получатся значения: 1 2 1 2 L=0,1*R; L=0,1*0,157=0,0157 м; R= D ; R= 0,315 =0,157 м. Подставляя численные значения в (3.10) получится численное значение момента инерции. J1 = 3,14 7800 0,0157 384,52 0,1574 − 0 = 0,0006 = 11,5 Н*м2 2 2 ( ) Определение приведенного момента инерции к валу электрического двигателя для основного электропривода производится согласно (25). J 1 J Прв = k k m Pn p y x (25) где: k = 0,045; kм =0,9 ( для электродвигателей для которых высота до центра вала ротора h, находится в пределах 50 <h <132мм); kм= 0,85 ( если 160 <h < 280мм); kм=0,8 ( если h ≥ 315мм); x = 1; y=2 . PН – номинальная мощность электрического двигателя, кВт; р – число пар полюсов;. Подставляя численные значения в (25) получится численное значение момента инерции. J adm = 0,045 0,8 75 22 = 10,8,Н*м2 Следовательно выполняется неравенство, что определенный аналитически приведенный момент инерции электрического двигателя соответствует паспортным данным установки, так как выполняется неравенство 11,5 10,8 . Определение приведенного момента инерции к валу электродвигателя для вспомогательного электропривода производится согласно (26). J1 = L 2 (R r ) ,Н*м2 4 4 (26) где: =3,14; - плотность материала из которого выполнен электродвигатель (сталь-Э-342) , (7800 kг/м3); L – длина статорного цилиндра электрического двигателя, м; R – внешний радиус цилиндра электрического двигателя, м; r – внутренний радиус цилиндра электрического двигателя, м; Подставляя численные значения согласно паспортным данным получатся соответствующе значения: 35 1 2 L = 0,1*R; L = 0,1*0,064 = 0,0064 м;R = D ;R = 1 0,128 = 0,064 м 2 Подставляя численные значения в (26) получится численное значение J1 = 2 3,14 7800 0,0064 156,748 0,064 4 − 0 = 0,0000167 = 0,13 Н*м 2 2 ( ) Определение приведенного момента инерции к валу электрического двигателя для основного электропривода производится согласно (27). J 1 J Прв = k k m Pn p y x (27) где: k = 0,045; kм =0,9 ( для электродвигателей для которых высота до центра вала ротора h, находится в пределах 50 <h <132мм); kм= 0,85 ( если 160 <h < 280мм); kм=0,8 ( если h ≥ 315мм); x = 1; y=2 . PН – номинальная мощность электрического двигателя, кВт; р – число пар магнитных полюсов; Подставляя численные значения в (3.13) получится численное значение J adm = 0,045 0,9 1,1 1 =4,45 Н*м2 Следовательно, выполняется неравенство, что определенный аналитически приведенный момент инерции электрического двигателя соответствует паспортным данным установки 0,13 <4,45 Для насосов и аксиальных вентиляторов приведенный момент инерции определяется исходя из того, что рабочее колесо состоит из цилиндрического шкифа с площадью, которое составляет 60% от рабочего расчетной поверхности. Толщина шкива составляет 5% от диаметра рабочего колеса для насосов, а для вентиляторов 0,3%. Диаметр рабочего колеса насосов (внутренний диаметр) составляет 40% от диаметра рабочего колеса, а для вентиляторов составляет соответственно 20%. Диаметр рабочего колеса составляет 0.1 диаметра колеса насоса и 0.02 диаметра для вентиляторов. Соответствующие колеса выполнены из стали. 3.6 Определение продолжительности пуска основного насоса. Продолжительность запуска основного насоса определяется и проверяется исходя из выражении (28). tП ≥ t ПР * J kм * J м (28) где: t ПР – продолжительность запуска основного насоса. tПР = 0,46 11,5 5,3 = 0,6 сек = 0,8 10,8 8,64 Продолжительность запуска вспомогательного насоса определяется и проверяется исходя из выражении (29). 36 tП ≥ t ПР * J kм * J м (29) где: t ПР – продолжительность запуска основного насоса. tp= 0,6 0,13 = 0,9 4,45 0,078 = 0,195 сек 0,4 3.7.Расчет и построение механических характеристик рабочего насоса. Расчет механической характеристики основной рабочей машины производится аналитически согласно выражение (30) для основного насоса. MРМ = M0+(Mn–M0) n x (30) где: M РМ – механический момент рабочей машины (основного насоса) при заданной угловой частоте вращения , Нм; M0 – пусковой механический момент рабочей машины , Нм; MН – номинальный механический момент рабочей машины , Нм; n – номинальная угловая скорость рабочей машины , с-1; x = 2 – для насосов; и центробежных вентиляторов, и др.; M0 = 0,25 MН – для насосов; и центробежных вентиляторов, и других рабочих машин; M0 = 1,8 MН – для аксиальных насосов; Ps – мощность рабочей машины на валу ,кВт; Ms – механический рабочий момент рабочей машины,Нм; Подставляя численные значения в (30) получится численное значение приведенные ниже. По полученным аналитическим значениям для различных скоростей вращения заносятся в таблице № 4, а на плоскости строится механическая характеристика рабочей машины. M n = 9550 Ps 27,7 = 9550 = 182,438 nn 1450 M0 = 0,25*182,438 = 45,6 N m 2 3000 M П1 = 45,6 + (182,438 − 45,6) = 182,438 4,28 = 780,83 Нм; 1450 2 MML2= 45,6 + (182,438 − 45,6) 2250 = 182,438 2,4 = 437,85 Нм; 1450 MML3= 45,6 + (182,438 − 45,6) 1500 = 182,438 1,07 = 195,2 Нм; 2 1450 MML7 = 45,6 + (182,438 − 45,6) 2700 = 182,438 3,46 = 631,23 Нм; 2 1450 Полученные численные значения заносятся в таблице 8 на основе, которых строится механическая характеристика основного электрического двигателя насосной установки, представленная на рис.5 37 Таблица 8 N, об/мин M,Нм 3000 2250 1500 750 0 2958 2700 780,83 437,85 195,2 47,43 0 758,94 631,23 Расчет механической характеристики рабочей машины производится аналитически согласно выражение (31) для вспомогательного насоса. MРМ = M0+(Mn–M0) n x (32) где: M РМ – механический момент рабочей машины ( основного насоса) при заданной угловой частоте вращения , Нм; M0 – пусковой механический момент рабочей машины , Нм; MН – номинальный механический момент рабочей машины , Нм; n – номинальная угловая скорость рабочей машины , с-1; x = 2 – для насосов; и центробежных вентиляторов, и других рабочих машин; M0 = 0,25 MН – для насосов; и центробежных вентиляторов, и других рабочих машин; M0 = 1,8 MН – для аксиальных насосов; Ps – мощность рабочей машины на валу ,кВт; Ms – механический рабочий момент рабочей машины,Нм; Подставляя численные значения в (3.18) получится численное значение приведенные ниже. P nn Mn = Ms = 9550* s = 9550* 0,9 = 2,96 Нм; 2900 (32) M0 = 0,25*2,96 = 0,74 Нм; 2 3000 MML1 = 0,74 + (2,96 − 0,74) = 2,96 1,07 = 3,167 Нм; 2900 2 2250 MML2 = 0,74 + (2,96 − 0,74) = 2,96 0,6 = 1,776 Нм; 2900 2 1500 MML3= 0,74 + (2,96 − 0,74) = 2,96 0,26 = 0,77 Нм; 2900 2 750 MML4 = 0,74 + (2,96 − 0,74) = 2,96 0,06 = 0,177 Нм; 2900 MML5 = 0,74 + (2,96 − 0,74) 2 0 = 2,96 0 = 0 Нм; 2900 38 2 MML6 = 0,74 + (2,96 − 0,74) 2811 = 2,96 0,93 = 2,75 Нм; 2900 2 MML7 = 0,74 + (2,96 − 0,74) 1830 = 2,96 0,39 = 1,15 Нм; 2900 По полученным аналитическим значениям механических моментов для различных скоростей вращения заносятся в таблице №9, а на плоскости строится механическая характеристика электрического двигателя, которая сопоставляется с механической характеристикой рабочей машины и представлена на рис.(1.8). Таблица9 n, 3000 2250 1500 750 0 2811 1830 об/мин M,pompa 3,167 1,776 0,77 0,177 0 2,75 1,15 xiliară 3.8.Расчет и построение механических характеристик электродвигателей рабочих насосов. Расчет механической характеристики асинхронного электродвигателя основного насоса производится аналитически согласно уравнение Клосса, что соответствует аналитическому выражению (3.19). M = 2M max s sk + sk s (3.19) где: sk – критическое скольжение асинхронного электродвигателя ; Mmax = m M n - максимальный момент асинхронного электродвигателя, Нм; P nН MН = 9550 Н -номинальный момент асинхронного электродвигателя, Нм;; nН – частота вращения асинхронного электродвигателя, об/мин; P nn Mn = 9550* n = 9550* 75 = 494 Нм 1450 Mmax = 1*494 = 494 Нм Задавая различные значения скольжении s в заранее заданных пределах, 0< s <1 определяется значение механического момента на валу асинхронного электродвигателя. Полученные аналитические значения заносятся в таблице № 6 по которым строятся механическая характеристика, что соответствует рис. 4. 1) M = 2 494 988 = = 0 Нм 0 0,1 0 + 0,1 0 39 2 494 988 = = 340,68 Нм 0,25 0,1 2,9 + 0,1 0,25 2 494 988 = = 190 Нм 3) M = 0,5 0,1 5,2 + 0,1 0,5 2 494 988 = = 129,48 Нм 4) M = 0,75 0,1 7 , 63 + 0,1 0,75 2 494 988 = = 97,82 Нм 5) M = 1 0,1 10,1 + 0,1 1 2 494 988 = = 138,37 Нм 6) M = 0,014 0,1 7 , 14 + 0,1 0,014 2) M = 7) M = 2 494 988 = = 494 Нм 0,1 0,1 2 + 0,1 0,1 a. Для вспомогательного насоса расчеты проводятся идентично, а полученные результаты заносятся в таблице №9 M = 2M max S Sk + Sk S где: Sk – критическое скольжение вспомогательного асинхронного электродвигателя; Mмакс = m M n - максимальный вращательный момент,Нм; P nn MН = 9550 n - номинальный момент развиваемый электродвигателем, Нм; nn – номинальное число оборотов, об/мин; P nn Mn = 9550* n = 9550* 1,1 = 3,62 Нм 2900 Mmax = 2,5*3,62 = 9,05 Нм Задавая различные значения скольжении s в заранее заданных пределах, 0< s <1 определяется значение механического момента на валу асинхронного электродвигателя. Полученные аналитические значения заносятся в таблице №6 по которым строятся механические характеристика рис. (1.8). 1) M = 2 9,05 18,1 = = 0 Нм 0 0,39 0 + 0,39 0 40 2) M = 2 9,05 18,1 = = 8,22 Нм 0,25 0,39 2,2 + 0,39 0,25 2 9,05 18,1 = = 8,78 Нм 0,5 0,39 2,06 + 0,39 0,5 2 9,05 18,1 = = 7,41 Нм 4) M = 0,75 0,39 2,44 + 0,39 0,75 2 9,05 18,1 = = 6,135 Нм 5) M = 1 0,39 2,95 + 0,39 1 2 9,05 18,1 = = 2,85 Нм 6) M = 0,063 0,39 6 , 35 + 0,39 0,063 2 9,05 18,1 M = = = 9,05 Нм 7) 0,39 0,39 2 + 0,39 0,39 3) M = 3000 3000 2500 2500 2000 2000 1500 1500 1000 1000 500 500 M, Н*м 0 0 200 400 600 M, Н*м 0 0 200 400 600 а б Рис.1.8. Механические характеристики электрического двигателя основного насоса (а) и вспомогательного насоса (б). M 8 1.0 1 0.8 0.6 2 4 3 0.4 5 7 6 n 0.2 0 Рис.1.9.Механические характеристики рабочих машин 41 Глава 4. АВТОМАТИЗАЦИЯ СИСТЕМЫ УПРАВЛЕНИЯ НАСОСНОЙ УСТАНОВКИ. 4.1. Проверка выбранного асинхронного электродвигателя по перегрузочной способности и по пусковому моменту. Выбранные асинхронные электродвигатели проверяются на совместимости по перегрузочной способности и по пусковому моменту для того чтобы убедится, что в процессе пуска они будут запускаться в зависимости от колебания напряжения в питающей сети, а также что они будут соответствовать тепловым режимам в процессе их работы. 1. Определение потерь напряжения в питающей сети учитывая при этом принципы выполнения питающей сети и марка используемого проводника с учетом реальной мощности выбранного асинхронного электрического двигателя: а) Проверяется допустимые потери напряжения при запуске асинхронного электродвигателя основного насоса: MП + M Д 100% U adm% = 1 − M П где: MП – пусковой момент асинхронного электродвигателя , MП = M0; MД – динамический пусковой момент асинхронного электродвигателя ,Нм;(MД = (0,2...0,3)MП; MП – пусковой момент асинхронного электродвигателя ,Нм;(MП = MН). MП = 45,6 Нм ; MП = 0,25*494 = 123,5 Нм 45,6 + 123,5 100% = (1 − 0,58) 100% = 42% U adm% = 1 − 494 б) Проверяется допустимые потери напряжения при запуске асинхронного электродвигателя вспомогательного насоса: M ps + M pn U adm% = 1 − 100% M p где: MП – пусковой момент асинхронного электродвигателя , MП = M0; MД – динамический пусковой момент асинхронного электродвигателя ,Нм;(MД = (0,2...0,3)MП; MП – пусковой момент асинхронного электродвигателя ,Нм;(MП = MН). Mps = 0,74 Нм; Mpn = 0,25*3,62= 0,9 Нм 0,74 + 0,9 100% = (1 − 0,45) 100% = 55% U adm% = 1 − 3 , 62 2) Определение снижения напряжения в питающей сети на зажимах асинхронного электродвигателей: а) Проверяется допустимые потери напряжения при запуске асинхронного электродвигателя основного насоса: 42 M МАК .Н U ДОП % = 1 − 100% М МАК где: MМАК.Н – максимальный нагрузочный момент асинхронного электродвигателя, приведенный к валу асинхронного электродвигателя, Нм; MМАК. – максимальный момент асинхронного электродвигателя, Нм; MМАК.Н = Mo = 45,6 Нм; MМАК = m M n = 1*494 =494 Нм 45,6 100% = 70% U ДОП % = 1 − 494 б) Проверяется допустимые потери напряжения при запуске асинхронного электродвигателя вспомогательного насоса: M МАК .Н U ДОП % = 1 − 100% М МАК где: MМАК.Н – максимальный нагрузочный момент асинхронного электродвигателя, приведенный к валу асинхронного электродвигателя, Нм; MМАК. – максимальный момент асинхронного электродвигателя, Нм; Ms = Mo = 0,74 Нм; Mmax = m M n = 2,5*3,62 = 9,05 НМ 0,74 100% = 71,4% U ДОП % = 1 − 9 , 05 Нормальный запуск и функционирование электродвигателей как основного так и вспомогательного насосов провереяется исходя из выполнения неравенств: U Д % U ДОП % ; U Д % U ДОП % где: U Д % - реальные потери напряжения у проверяемого электродвигателя в соответствии с выполненными расчетами; U ДОП % - допустимые фактические потери напряжения у проверяемого электродвигателя в соответствии с выполненными расчетами; а) Определение реальных допустимых потери напряжения при запуске асинхронного электродвигателя основного насоса: U ДОП .Р % = Zt + Zl 100% Zt + Zl + Z m где: ZКЗТ– полное сопротивление короткого замыкания трансформатора, ; ZЛ – полное сопротивление питающей линии, ; ZД – полное сопротивление короткого замыкания асинхронного двигателя, ; Вышеприведенные сопротивления определяются аналитически из нижеприведенных выражениях uk % U n % ; 100 S n 2 ZКЗТ = Zl =Z0*l ; Zm = Un = 3 In k Un 3 Ip 43 где: uk% - нарпяжения короткого замыкания трансформатора , %: uk 5%; Un – номинальное напряжение питающей сети (UН = 400, В); Sn – полная мощность трансформатора, кVA; Z0 – удельное сопротивление питающей линии в зависимости от марки проводов, / km (таблица, 8); l – Длина питающей линии в, м (км); IН – номинальный ток электродвигателя A; k – Соотношение между пусковым и рабочим током асинхронного электродвигателя насоса; IП – пусковой ток асинхронного электродвигателя насоса, A. IН = Pn ; 3 U n cos IП = k*IН где: PН – номинальная мощность асинхронного электродвигателя насоса, кВт; - коэффициент полезного действия асинхронного электродвигателя насоса; IН = 75000 = 133,82 A; 1,73 400 0,89 0,91 IП =7,5*133,82 = 1003,65 A Удельное сопротивление питающей линии в зависимости от марки проводов в, / km , приведены в таблице 10. Таблица 10 Maрка проводника Z0, / km Zt = A16 A25 A35 A50 1,8 1,14 0,83 0,64 5% 400 = 0,127 100 63000 2 Zm = Zl = 1,8*0,18 = 0,324 400 = 0,23 1,73 1003,65 Определение реальных допустимых потерь напряжения при запуске и работы асинхронных электродвигателей насосной станции. U РЕЛ % = 0,127 + 0,324 0,451 100 = 100 = 66,22 % 0,127 + 0,324 + 0,23 0,681 Для асинхронного электродвигателя основного насоса реальные потери напряжения UРЕЛ% выше чем допустимые потери напряжения UДОП%, то в таких условия насосная установка не будет запускаться. В таких случаях для запуска асинхронного электродвигателя насоса могут быть использованы следующие методы; 1) Изменение сечения питающей линии на другое сечение, большее на одну ступень; 44 2) Изменение ( уменьшении ) длины питающей линии; 3) Изменение сечения питающей линии на другое сечение, большее на одну ступень и уменьшении длины питающей линии. Для разрабатываемого проекта применяется изменение (уменьшении) длины питающей линии электропердачи от длины 300м, до 20м. Для такого варианта полное сопротивление питающей линии определяется как: ZЛ = 0.18*0,02 =0,0036 Потери напряжения в таком для такого варианта будут определятся исходя из выражении: U ДОП % = 0,0127 + 0,0036 0,0163 100 = 100 = 6.6% 0,0127 + 0,0036 + 0,23 0,393 Сравнивая реальные потери с минимально допустимые потери можно констатировать, что условия для запуска по потерям напряжения выполняются. ∆UРЕЛ ∆UДОП; 6.6% 42% б. Определение реальных допустимых потери напряжения при запуске асинхронного электродвигателя вспомогательного насоса: U ДОП .Р % = Zt + Zl 100% Zt + Zl + Z m где: ZКЗТ– полное сопротивление короткого замыкания трансформатора, ; ZЛ – полное сопротивление питающей линии, ; ZД – полное сопротивление короткого замыкания асинхронного двигателя , ; Вышеприведенные сопротивления определяются аналитически из нижеприведенных выражениях uk % U n % ; 100 S n 2 ZКЗТ = Zt = 5% 4002 = 0,127 100 63000 Zl =Z0*l ; Zm = Un = 3 In k Zl = 1,8*0,02 =0,036 ZД = Un 3 Ip 400 = 17,84 1,73 12,96 где: uk% - нарпяжение короткого замыкания трансформатора , %: uk 5%; Un – номинальное напряжение питающей сети (UН = 400, В); Sn – полная мощность трансформатора , кVA; Z0 – удельное сопротивление питающей линии в зависимости от марки проводов, / km (таблица, 8); l – длина питающей линии в , м (км); IН – номинальный ток электродвигателя A; k – соотношение между пусковым и рабочим током асинхронного электродвигателя насоса; IП – пусковой ток асинхронного электрического двигателя, A. IН = Pn ; 3 U n cos IП = k*IН 45 In = 1100 = 2,357 A ; 1,73 400 0,87 0,775 Ip =5,5*2,357= 12,96 A где: PН – номинальная мощность асинхронного электродвигателя насоса, кВт; - коэффициент полезного действия асинхронного электродвигателя насоса; Для асинхронного электродвигателя вспомогательного насоса реальные потери напряжения UРЕЛ% выше чем допустимые потери напряжения UДОП% , то в таких условия насосная установка не будет запускаться. В таких случаях для запуска асинхронного электродвигателя насоса могут быть использованы следующие методы; 1) Изменение сечения питающей линии на другое сечение, большее на одну ступень; 2) Изменение ( уменьшении ) длины питающей линии; 3) Изменение сечения питающей линии на другое сечение, большее на одну ступень и уменьшении длины питающей линии. Для такого варианта полное сопротивление питающей линии определяется как: ZЛ = 0.18*0,02 =0,0036 Потери напряжения в таком для такого варианта будут определятся исходя из выражении: U r % = 0,127 + 0,036 0,162 100 = 100 = 2,46 % 0,127 + 0,036 + 17,84 18 Сравнивая реальные потери с минимально допустимые потери можно констатировать, что условия для запуска по потерям напряжения выполняются. ∆UРЕЛ ∆UДОП; 2.46% 55% 4.2. Разработка принципиальных электрических схем автоматизации технологического процесс работы насосных установок. Выбор аппаратуры защиты и управления и выбор принципиальных электрических схем управления электроприводами насосных станций необходимо для автоматического выполнения технологических процессов, предназначенных для таких систем как управления, так и защиты соответствующего электрооборудования. Для защиты электродвигателей насосных установок используется аппаратура защиты выбирается по следующим параметрам: а) номинальном напряжении; б) номинальным током: с) условиям функционирования. Для защиты от перегрузок и от коротких замыканиях наиболее дешевым, надежным и удобным и которые обладают сравнительно простой конструкцией являются плавкие вставки. 46 4.3.Выбор аппаратуры защиты и управления и выбор принципиальных электрических схем Учитывая, что для насосной станции установлены два асинхронных электродвигателей с различных мощностей, то естественно необходимо разрабатывать схемы управления всей установкой в целом. Параметры асинхронных электродвигателей следующие: Номинальное напряжение питания UН=400 В Номинальное параметры основного электродвигателя: PП1=75 kW; IН1 = 133,82 A; k1= 7,5; Номинальное параметры вспомогательного электродвигателя: PП2=1,1 kW; IН2 =2,357 A; k2= 5,5 1.Определение максимального тока плавких вставок для асинхронного электродвигателя аналитически выполняется согласно нижеприведенного уравнения: I ПВ = IП = IН k где: IПВ – тока плавких вставок, A; IП – пусковой ток асинхронного электродвигателя , A; IН – номинальный ток асинхронного электродвигателя , A; k –соотношение между пусковым и номинальным током асинхронного электродвигателя , A; -коэффициент, значение которого зависит от условия пуска и работы асинхронного электродвигателя , A; оп coeficient, valoarea căruia depinde de condiţiile de pornire ale motorului. Для t=(5...10)s - =2,5 ( легких условиях пуска асинхронного электродвигателя , A); Определение максимального тока плавких вставок для асинхронного электродвигателя основной насосной установки аналитически выполняется: I ПВ = 133,82 7,5 = 401,46 A 2,5 Определение максимального тока плавких вставок для асинхронного электродвигателя вспомогательной насосной установки аналитически выполняется: I ПВ = 2,357 5,5 = 5,185 A 2,5 Выбор автоматических выключателей. Выбор автоматических выключателей осуществляется по номинальному рабочему току магнитного пускателя по тепловому расцепителю и в соответствии с электромагнитным расцепителем, который выбирается согласно[3]. IН.ЭМП ≥ I.Н.Д. где: IН.ЭМП -номинальный рабочий ток магнитного пускателя , A; I.Н.Д. – номинальный рабочий электродвигателя, A. 47 Выбор автоматических выключателей для основного электродвигателя насосной установки, осуществляется по номинальному рабочему току магнитного пускателя по тепловому расцепителю и в соответствии с электромагнитным расцепителем , который выбирается согласно[3]. 160 A 133,82 A Выбор автоматических выключателей для вспомогательного электродвигателя насосной установки, осуществляется по номинальному рабочему току магнитного пускателя по тепловому расцепителю и в соответствии с электромагнитным расцепителем , который выбирается согласно[3]. 16 A 2,357 A Полученных и приведенным условиям соответствует автоматический выключатель типа A3710Б Определение максимального тока теплового расцепителя магнитного пускателя для асинхронного электродвигателя основной насосной установки аналитически должен соответствовать значению: IТР= (0.63-1.0) I.Н.Д. где: I.ТР- максимально – возможное значение термического тока расцепителя электрического двигателя, А; I.Н.Д. - номинальный рабочий электродвигателя, A. Определение максимального тока теплового расцепителя магнитного пускателя I ЕР . = I nНН = 1 + 0,006(40 − tm ) где: tт – температура окружающей среды ,oC , определяемая согласно (таблице 11): Tаблица 11 o t, C 40 25 15 0 IТР. IН...Д. 0,9 IН...Д. 0,85 IН...Д. 0,8 IН...Д. Определение максимального тока теплового расцепителя магнитного пускателя для основного двигателя 133,82 = 116,36 A 1,15 = 1 + 0,006(40 − 15) = 1,15 IТР = Определение максимального тока теплового расцепителя магнитного пускателя для вспомогательного двигателя 2,357 = 2,05 A 1,15 = 1 + 0,006(40 − 15) = 1,15 IТРt . = Выбор теплового реле для основного электродвигателя насосной установки, осуществляется по номинальному рабочему току электродвигателя, для которого согласно [3] должно 48 IН.ТР ≥I Н.Д. где: IН.ТР – номинальный ток биметаллической пластины теплового реле, A; Номинальный ток биметаллической пластины теплового реле может быть регулирован в пределах: IТР = (0.75-1,25) I Н.Д. Номинальный ток биметаллической пластины теплового реле для основного электродвигателя может быть регулирован в пределах и имеет значение: IТР = (0,75...1,25) 133,82 = 1,2 133,82 = 160,58 A Основное неравенство выполняется 160,58 A 133,82 A Номинальный ток биметаллической пластины теплового реле для вспомогательного электродвигателя может быть регулирован в пределах и имеет значение: IТР = (0,75...1,25) 2,357 = 1,25 2,357 = 2,94 A Основное неравенство выполняется 2,94 A 2,357 A При выборе теплового реле необходимо учитывать температура окружающей среды: N = N1+N2 где: N1 – шкала отсчета теплового реле определяется из выражении: N1 = I Н . Д . − I Н .ТР. Cs I Н .ТР. где: I.Н.Д. – номинальный рабочий асинхронного электродвигателя, A. IН.ТР – номинальный ток биметаллической пластины теплового реле, A; Cs – цена одного деления шкалы отсчета теплового реле (5% или 0,5 условных единиц). Определение числа условных единиц для N1 – шкала отсчета теплового реле основного асинхронного двигателя N1 = 133,82 − 160,58 = 0,33 ; 0,5 160,58 N2 = 40 − 15 = 2,5 ; N = 0,33+2,5=2,83 10 Определение числа условных единиц для N1 – шкала отсчета теплового реле вспомогательного двигателя N1 = 2,357 − 2,94 = 0,39 ; 0,5 2,94 N2 = 40 − 15 = 2,5 ; N = 0,39+2,5=2,89 10 4.4 Пояснение к принципиальной электрической схеме управления и защиты асинхронных двигателей насосной установки. Принципиальная электрическая схема управления и защиты асинхронных двигателей насосной установки выполняет следующие функции: 1. управлением насосной установки как в автоматическом, так и в ручном режиме работы; 2. выполнение пуска и остановки насосных установок; 49 3. запуск основного насоса при соблюдение после заполнения патрубка вспомогательным насосом; 4. запуск вспомогательного насоса; 5. защита насосной установки от токов короткого замыкания и механических и тепловых перегрузок; 6. сигнализации при аварийных режимах работы насосной установки. Условное обозначение на электрических схемах: KV – реле напряжения (контакты реле напряжения) KK – токовое реле (контакты токового реле) KM – катушка магнитного пускателя (контакты катушки магнитного пускателя) SB1, SB3 – кнопки пуска насосной установки. SB2, SB4 – кнопки остановки насосной установки, кнопка стоп KT – реле времени (контакты реле времени) SP – реле давления HL – лампы накаливания для сигнализации R – активные сопротивления M – асинхронный электродвигатель. 4.5.Принцип работы схемы управления и защиты асинхронных двигателей насосной установки: а) ручное управление. Ручное управление устанавливается при помощи ручки управления у пульта управления в левой позиции М, таким образом принципиальная схема управления готова к работе. При нажатие кнопки SB-I, через катушку индуктивности магнитного пускателя КМ-1 протечет ток и через сопротивление R1 и сигнальных ламп HL-1 и HL-5 и цепь управления и цепь сигнализации замыкаются и магнитный пускатель КМ-2 замкнет свои нормально открытые контакты и нормально закрытые контакты размыкает в результате чего сигнальная лампа HL-4 начнет сигнализировать о том, что вспомогательный электродвигатель включен в рабочую сеть. Таким образом включается вспомогательный двигатель вспомогательного насоса, при помощи которого заполняется водой трубопровод основного насоса. Таким образом подготавливается гидравлическая цепь основного насоса. Через определенный промежуток времени, определенный при помощи реле времени (таймера) КТ он включит свои нормально открытые контакты в результате чего подготавливается цепь управления для включения асинхронного электродвигателя основного насоса при помощи реле давления SР с нормально закрытые контакты. Таким образом включается вспомогательный двигатель вспомогательного насоса, при помощи которого заполняется водой 50 трубопровод основного насоса. Таким гидравлическая цепь основного насоса. образом подготавливается 4.6. Обоснование силовой электрической схемы управления и защиты асинхронных двигателей насосной установки а) Принципиальная электрическая схема автоматического управления различных электрических приводов в том числе и насосных установок для водоснабжения ирригационных систем. HL1 R1 HL2 М0 А R2 HL3 R3 км2 кv1 кк1,2 КМ 1 КМ 1 SP КТ SB 4 КМ 2 км2 кv1 кк3.4 SB3 КМ 1 КТ КМ 1 HL 4 R4 HL5 R5 Ручное управление устанавливается при помощи ручки управления у пульта управления в правой позиции А, таким образом принципиальная схема управления готова к работе. В таком режиме катушка реле времени (таймера) КТ попадет под напряжением в результате чего через определенный промежуток времени КТ включит свои контакты, нормально открытые в результате чего реле давления SР замкнет свои нормально открытые контакты, так как давление в трубопроводе низкое, потому что он не заполнен водой, а нормально закрытые контакты реле давления SР разомкнутся. В результате через 51 катушку индуктивности магнитного пускателя КМ-1 протечет ток и через сопротивление R1 и сигнальных ламп HL-1 и HL-5 и цепь управления и цепь сигнализации замыкаются и магнитный пускатель КМ-2 замкнет свои нормально открытые контакты и нормально закрытые контакты размыкает в результате чего сигнальная лампа HL-4 начнет сигнализировать о том, что вспомогательный электродвигатель включен в рабочую сеть. Автоматической управление устанавливается при помощи ручки управления у пульта управления в правой позиции А, таким образом принципиальная схема управления готова к работе. В таком режиме катушка реле времени (таймера) КТ попадет под напряжением в результате чего через определенный промежуток времени КТ включит свои контакты нормально открытые в результате чего нормально закрытые контакты реле давления SР с нормально закрытые контакты, через катушку индуктивности магнитного пускателя КМ-2 протечет ток и через сопротивление R1 и сигнальных ламп HL-1 и HL-5 и цепь управления и цепь сигнализации замыкаются и магнитный пускатель КМ-2 замкнет свои нормально открытые контакты нормально закрытые контакты размыкает в результате чего сигнальная лампа HL-5 начнет сигнализировать о том, что основной электродвигатель включен в рабочую сеть. б) Минимально необходимые требования к схеме управления электрических приводов 1. Управлять запуском электрического двигателя независимо, от ее технического назначения. 2. Для систем орошения предусматривать перед открытием задвижки на напорном трубопроводе, ее открытие в автоматическом режиме. 3. При достижение заданного объема воды насосная установка должно остановится в автоматическом режиме. 4. Предусмотреть возможность автоматического и ручного режимов управления насосной установкой. 5. Предусмотреть возможность защиты насосной установкой от коротких замыканий, перегрузок, обрыва фазы сети и самозапуска. 6. Установить сигнализацию об возможных аварийных и ненормальных рабочих режимов работы насосной установки. 7. Разработать структурную схему управления электрическими приводами независимо от их технологического назначения и систем управления (ручное или автоматическое). 52 6. Охрана труда и техника безопасности при эксплуатации электроустановок напряжением U< 1000В Расчет заземляющего устройства электроустановок напряжением ниже U< 1000В От подстанции отходят три воздушные линии 380/220 В, на которых в соответствии ПУЭ намечено выполнить шесть повторных заземлений нулевого провода. Удельное сопротивление грунта, измеренное при нормальной влажности, ρизм=120 Ом·м. Заземляющий контур в виде прямоугольного четырехугольника выполняют путем заложения в грунт вертикальных стальных стержней длиной 5 м диаметром 12 мм, соединенных между собой стальной полосой 404 мм. Глубина заложения стержней – 0,8 м, полосы-0,9 м. Ток замыкания на землю на стороне 10 кВ Iз= 8 А. Определяем расчетное сопротивление грунта для стержневых заземлителей расч = k с k1 изм = 1,15 1,0 120 = 138 Ом·м. Сопротивление вертикального заземлители из круглой стали 2l 4h + l / l = 0,366 138 lg 2 5 + 0,5 lg 4 3,3 + 5 / 5 = 31 Ом. R = 0,366 lg + 0,5 lg в расч ср d 4hср − l 4 3,3 − 5 0,012 Сопротивление повторного заземления Rп.з не должно превышать 30 Ом при ρ=100 Ом·м и ниже. При ρ>100 Ом·м допускают принимать Rп.з=30ρ/100=30•138/100 41 Ом Для повторного заземления принимаем один стержень длиной 5 м и диаметром 12 мм, сопротивление которого 31,2 Ом 41 Ом. Общее сопротивление всех шести повторных заземлении rп.з = Rп.з/n= Rв/n=31,2/6 =5,2 Ом определяем расчетное сопротивление заземления нейтрали трансформатора с учетом повторных заземлении rиск= r.з rп.з/( rп.з- rз)=4•5,2//(5,2-4)=17,3 Ом. В соответствии с ПУЭ сопротивление заземляющего устройства при присоединении к нему электрооборудования напряжением до и выше 1000 В не должно быть более 10 Ом и 125/Iз, если последнее решение меньше 10 Ом, rиск=125/8=15,6 Ом. Принимаем для расчета наименьшее из этих значений rиск=10 Ом. Определяем теоретическое число стержней nТ= Rв/ rиск =31,2/10=3,12. Принимаем четыре стержня и располагаем их в грунте на расстояние полосы связи lg 2 400 Rв=0,366 рас lg 2l 2 (dh) l = 0,366 300 (0,04 0,82) 20 = 24,2 Ом; ρрасч=2,5•1•120=300 Ом•м [56, табл.27.2 и 27.3]. При n=4 и ail=5/5=1 ηв=0,69 ηг=0,45. 53 В таком случае действительное число стержней определяется как: n д = R в г 1 − 1 = 31,2 0,45 1 −1 = 3,56 Rг в 24,2 0,69 (rиск г ) (10 0,45) 1.Оценка значений напряжений прикосновения и шага в особо опасных точках. 2.Оценка результатов первоначальных расчетов и выяснение необходимости ранее намеченных заземляющих устройств. 3.Увеличение (в случае необходимости) проводимости заземляющих устройств средством размещения дополнительных вертикальных глубинных заземляющих электродов одновременным увеличением поверхности выравнивания сетки в опасных местах. 4.Повторное определение суммарной проводимости заземляющего контура с учетом дополнительных мероприятий, оценка ее значения и решение о необходимости дополнительного увеличения проводимости путем применения выносных контуров, искусственной обработки грунта или других мероприятий. 5.Оценка значения выносных потенциалов. 6.Конструктивная разработка заземляющих устройств и дополнительное размещение заземлителей в местах установки разрядников, молниеотводов, силовых трансформаторов, могущих работать с заземленной нейтралью. 6.Испытание заземляющих устройств. 7.Оформление отчетно-технической документации. Приведенная схема сооружения заземляющих устройств относится к открытым электроустановкам, работающим в системах с заземленной нейтралью. Для закрытых насосных станций следует внести некоторые изменения и дополнения. Наличие бетонных полов и различных изолирующих покрытий, с одной стороны, требует учета переходного сопротивления от ноги к бетонному полу, что значительно изменяет сопротивление пути протекания тока. С другой стороны, изменяется и картина распределения потенциала. Заключение По окончанию курсового проекта подводятся итоги по теме. Заключение носит форму обобщения полученных в работе результатов. В заключении излагаются полученные выводы и их соотношение с целью курсового проекта. Пример заключения: В результате выполнения данного проекта можно утверждать, что водоснабжение является одной из отраслей довольно актуальной, так как нехватка водных ресурсов все более настойчиво дает о себе знать. 54 Для выполнения процессов водоснабжения расходуется огромное количество электроэнергии и других энергетических ресурсов, следовательно, эта отрасль народного хозяйства является весьма энергоемкой. Для снижения энергоемкости процессов водоснабжения в проекте была выполнена попытка по выбору насосной установки электропривода, который работал в оптимальном режиме. Были определены параметры электрических приводов, режимы их работы, было обосновано предложенная аппаратура управления и защиты и на ее основе разработаны электрические схемы электроснабжения и управления такими приводами. Рассмотрены вопросы техники безопасности при обслуживания электроустановок напряжением ниже 1000В. Составление списка источников и литературы В список литературы включаются источники, изученные студентом в процессе подготовки работы, в т.ч. те, на которые необходимо ссылаться в тексте курсового проекта. Список используемой литературы оформляется в соответствии с правилами, предусмотренными государственными стандартами. Источники размещаются в алфавитном порядке. Для всей литературы применяется сквозная нумерация. При ссылке на литературу в тексте курсового проекта следует записывать не название книги (статьи), а присвоенный ей в указателе “Список литературы” порядковый номер в квадратных скобках. Ссылки на литературу нумеруются по ходу появления их в тексте записки. Применяется сквозная нумерация. 55 ОБЩИЕ ПРАВИЛА ОФОРМЛЕНИЯ КУРСОВЫХ РАБОТ/ПРОЕКТОВ Оформление текстового материала Текстовая часть работы должна быть представлена в компьютерном варианте на бумаге формата А4. Шрифт – Times New Roman, размер шрифта – 14, полуторный интервал, выравнивание по ширине. Страницы должны иметь поля (рекомендуемые): нижнее – 2,5; верхнее – 2; левое – 3; правое – 1,5. Объем курсовой работы/проекта - 15-25 страниц. Все страницы работы должны быть подсчитаны, начиная с титульного листа и заканчивая последним приложением. Нумерация страниц должна быть сквозная, начиная с введения и заканчивая последним приложением. Номер страницы ставится на середине листа нижнего поля. Весь текст работы/проекта должен быть разбит на составные части. Разбивка текста производится делением его на разделы (главы) и подразделы (параграфы). В содержании работы/проекта не должно быть совпадения формулировок названия одной из составных частей с названием самой работы, а также совпадения названий глав и параграфов. Названия разделов (глав) и подразделов (параграфов) должны отражать их основное содержание и раскрывать тему работы/проекта. При делении работы/проекты на разделы (главы) (согласно ГОСТ 2.105-95) их обозначают порядковыми номерами – арабскими цифрами без точки и записывают с абзацного отступа. При необходимости подразделы (параграфы) могут делиться на пункты. Номер пункта должен состоять из номеров раздела (главы), подраздела (параграфа) и пункта, разделённых точками. В конце номера раздела (подраздела), пункта (подпункта) точку не ставят. Если раздел (глава) или подраздел (параграф) состоит из одного пункта, он также нумеруется. Пункты при необходимости, могут быть разбиты на подпункты, которые должны иметь порядковую нумерацию в пределах каждого пункта, например: 4.2.1.1, 4.2.1.2, 4.2.1.3 и т. д. Каждый пункт, подпункт и перечисление записывают с абзацного отступа. Разделы (главы), подразделы (параграфы) должны иметь заголовки. Пункты, как правило, заголовков не имеют. Наименование разделов (глав) должно быть кратким и записываться в виде заголовков (в красную строку) жирным шрифтом, без подчеркивания и без точки в конце. Заголовки должны четко и кратко отражать содержание разделов (глав), подразделов (параграфов), пунктов. 56 Нумерация страниц основного текста и приложений, входящих в состав работы/проекта, должна быть сквозная. В основной части работы/проекта должны присутствовать таблицы, схемы, графики с соответствующими ссылками и комментариями. В работе/проекте должны применяться научные и специальные термины, обозначения и определения, установленные соответствующими стандартами, а при их отсутствии – общепринятые в специальной и научной литературе. Если принята специфическая терминология, то перед списком литературы должен быть перечень принятых терминов с соответствующими разъяснениями. Перечень включают в содержание работы (Приложение 7). Оформление иллюстраций Все иллюстрации, помещаемые в работу/проект, должны быть тщательно подобраны, ясно и четко выполнены. Рисунки и диаграммы должны иметь прямое отношение к тексту, без лишних изображений и данных, которые нигде не поясняются. Количество иллюстраций в работе/проекте должно быть достаточным для пояснения излагаемого текста. Иллюстрации следует размещать как можно ближе к соответствующим частям текста. На все иллюстрации должны быть ссылки в тексте работы/проекта. Наименования, приводимые в тексте и на иллюстрациях, должны быть одинаковыми. Ссылки на иллюстрации разрешается помещать в скобках в соответствующем месте текста, без указания см. (смотри). Ссылки на ранее упомянутые иллюстрации записывают, сокращенным словом смотри, например, см. рисунок 3. Размещаемые в тексте иллюстрации следует нумеровать арабскими цифрами, например: Рисунок 1, Рисунок 2 и т.д. Допускается нумеровать иллюстрации в пределах раздела (главы). В этом случае номер иллюстрации должен состоять из номера раздела (главы) и порядкового номера иллюстрации, например, Рисунок 1.1. Надписи, загромождающие рисунок, чертеж или схему, необходимо помещать в тексте или под иллюстрацией. Общие правила представления формул В формулах и уравнениях условные буквенные обозначения, изображения или знаки должны соответствовать обозначениям, принятым в действующих государственных стандартах. В тексте перед обозначением параметра дают его пояснение. При необходимости применения условных обозначений, изображений или знаков, не установленных действующими стандартами, их следует пояснять в тексте или в перечне обозначений. Формулы и уравнения располагают на середине строки, а связывающие их слова (следовательно, откуда и т.п.) – в начале строки. Оформление таблиц 57 Цифровой материал, как правило, оформляют в виде таблиц. Название таблицы должно отражать её содержание, быть точным и кратким. Лишь в порядке исключения таблица может не иметь названия. Таблицы в пределах всей записки нумеруют арабскими цифрами сквозной нумерацией, перед которыми записывают слово Таблица. Допускается нумеровать таблицы в пределах раздела. В этом случае номер таблицы состоит из номера раздела и порядкового номера таблицы, разделенные точкой. Пример: Таблица 1 Наименование таблицы На все таблицы должны быть ссылки в тексте, при этом слово таблица в тексте пишут полностью, например: в таблице 1. Таблицу, в зависимости от ее размера, помещают под текстом, в котором впервые дана ссылка на нее, или на следующей странице, а при необходимости, в приложении. Допускается помещать таблицу вдоль стороны листа. Оформление приложений В приложениях курсового проекта помещают материал, дополняющий основной текст. Приложениями могут быть: – графики, диаграммы; – таблицы большого формата, – статистические данные; – фотографии, – коды программных модулей, – процессуальные (технические) документы и/или их фрагменты и т.д. Приложения оформляют как продолжение основного текста на последующих листах или в виде самостоятельного документа. В основном тексте на все приложения должны быть даны ссылки. Приложения располагают в последовательности ссылок на них в тексте. Каждое приложение должно начинаться с нового листа (страницы) с указанием в правом верхнем углу страницы слова Приложение и номера, обозначаемого арабскими цифрами. Приложение должно иметь заголовок, который записывают с прописной буквы отдельной строкой. 58 Литература 1. Игнатович В.М. Электрические машины и трансформаторы [Электронный ресурс]: учебное пособие/ В.М. Игнатович, Ш.С. Ройз— Электрон. текстовые данные.— Томск: Томский политехнический университет, 2013.— 182 c.— Режим доступа: http://www.iprbookshop.ru/34738.html.— ЭБС «IPRbooks» 2. Сипайлова Н.Ю. Основы проектирования электротехнических изделий. Вопросы расчета электрических аппаратов [Электронный ресурс]: учебное пособие для СПО/ Н.Ю. Сипайлова— Электрон. текстовые данные.— Саратов: Профобразование, 2017.— 167 c.— Режим доступа: http://www.iprbookshop.ru/66396.html.— ЭБС «IPRbooks» 3. Сипайлова Н.Ю. Вопросы проектирования электрических аппаратов [Электронный ресурс]: учебное пособие/ Сипайлова Н.Ю.— Электрон. текстовые данные.— Томск: Томский политехнический университет, 2014.— 168 c.— Режим доступа: http://www.iprbookshop.ru/34657.— ЭБС «IPRbooks» 4. Алиев И.И. Электротехника и электрооборудование [Электронный ресурс]: справочник. Учебное пособие для вузов/ И.И. Алиев— Электрон. текстовые данные.— Саратов: Вузовское образование, 2014.— 1199 c.— Режим доступа: http://www.iprbookshop.ru/9654.html.— ЭБС «IPRbooks» 5. Браун Марк Электрические цепи и электротехнические устройства. Диагностика неисправностей [Электронный ресурс]/ Марк Браун, Джавахар Раутани, Дайниш Пэтил— Электрон. текстовые данные.— Саратов: Профобразование, 2017.— 327 c.— Режим доступа: http://www.iprbookshop.ru/63565.html.— ЭБС «IPRbooks» 6. Федорчук А.Е. Автоматизация технического диагностирования и мониторинга устройств ЖАТ (система АДК-СЦБ) [Электронный ресурс]: учебное пособие/ А.Е. Федорчук, А.А. Сепетый, В.Н. Иванченко— Электрон. текстовые данные.— М.: Учебнометодический центр по образованию на железнодорожном транспорте, 2013.— 401 c.— Режим доступа: http://www.iprbookshop.ru/26793.html.— ЭБС «IPRbooks» 7. Коломиец Н.В. Режимы работы и эксплуатация электрооборудования электрических станций [Электронный ресурс]: учебное пособие/ Н.В. Коломиец, Н.Р. Пономарчук, Г.А. Елгина— Электрон. текстовые данные.— Томск: Томский политехнический университет, 2015.— 72 c.— Режим доступа: http://www.iprbookshop.ru/55206.html.— ЭБС «IPRbooks» 8. Бойцов Б.В. Вопросы управления качеством технологических процессов [Электронный ресурс]: учебное пособие/ Б.В. Бойцов, Ю.Ю. Комаров, Г.В. Панкина— Электрон. текстовые данные.— М.: Академия стандартизации, метрологии и сертификации, Московский авиационный институт, 2013.— 298 c.— Режим доступа: http://www.iprbookshop.ru/44342.html.— ЭБС «IPRbooks» 9. Ветров В.И. Электромеханические преобразователи, диагностика и защита [Электронный ресурс]: учебное пособие/ В.И. Ветров, В.П. Ерушин, И.П. Тимофеев— Электрон. текстовые данные.— Новосибирск: Новосибирский государственный технический университет, 2013.— 259 c.— Режим доступа: http://www.iprbookshop.ru/45201.html.— ЭБС «IPRbooks» 10. Архангельский Г.Г. Гидравлические лифты. Конструкция, монтаж и обслуживание [Электронный ресурс]: учебное пособие/ Г.Г. Архангельский— Электрон. текстовые данные.— М.: Московский государственный строительный университет, ЭБС АСВ, 2013.— 272 c.— Режим доступа: http://www.iprbookshop.ru/20000.html.— ЭБС «IPRbooks» 11. Куско А. Сети электроснабжения. Методы и средства обеспечения качества энергии [Электронный ресурс]/ А. Куско, М. Томпсон— Электрон. текстовые данные.— Саратов: Профобразование, 2017.— 334 c.— Режим доступа: http://www.iprbookshop.ru/63797.html.— ЭБС «IPRbooks» 12. Груздов В.В. Контроль новых технологий в твердотельной СВЧ 59 электронике [Электронный ресурс]/ В.В. Груздов, Ю.В. Колковский, Ю.А. Концевой— Электрон. текстовые данные.— М.: Техносфера, 2016.— 328 c.— Режим доступа: http://www.iprbookshop.ru/58857.html.— ЭБС «IPRbooks» 13. Васильев Б.Ю. Электропривод. Энергетика электропривода [Электронный ресурс]: учебник/ Б.Ю. Васильев— Электрон. текстовые данные.— М.: СОЛОН-ПРЕСС, 2015.— 272 c.— Режим доступа: http://www.iprbookshop.ru/53868.html.— ЭБС «IPRbooks» 14. Дубинский Г.Н. Наладка устройств электроснабжения выше 1000 В [Электронный ресурс]/ Г.Н. Дубинский, Л.Г. Левин— Электрон. текстовые данные.— М.: СОЛОН-ПРЕСС, 2015.— 538 c.— Режим доступа: http://www.iprbookshop.ru/65114.html.— ЭБС «IPRbooks» 15. Ионов А.А. Технико-экономическое обоснование проектирования, модернизации и монтажа лифтов [Электронный ресурс]: учебно-практическое пособие/ А.А. Ионов, Н.Е. Симакова— Электрон. текстовые данные.— М.: Московский государственный строительный университет, ЭБС АСВ, 2016.— 72 c.— Режим доступа: http://www.iprbookshop.ru/60835.html.— ЭБС «IPRbooks» 16. Бекишев Р.Ф. Общий курс электропривода [Электронный ресурс]: учебное пособие/ Бекишев Р.Ф., Дементьев Ю.Н.— Электрон. текстовые данные.— Томск: Томский политехнический университет, 2014.— 302 c.— Режим доступа: http://www.iprbookshop.ru/34688.— ЭБС «IPRbooks» 17. Дементьев Ю.Н. Электрический привод [Электронный ресурс]: учебное пособие/ Дементьев Ю.Н., Чернышев А.Ю., Чернышев И.А.— Электрон. текстовые данные.— Томск: Томский политехнический университет, 2013.— 224 c.— Режим доступа: http://www.iprbookshop.ru/34739.— ЭБС «IPRbooks» 60 Приложение 1 Форма титульного листа курсовой работы ЧАСТНОЕ ПРОФЕССОНАЛЬНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ «КОЛЛЕДЖ УПРАВЛЕНИЯ И ПРОИЗВОДСТВА» КУРСОВАЯ РАБОТА РАЗРАБОТКА ИНФОРМАЦИОННОЙ СИСТЕМЫ «_________» ПМ.02 «ОРГАНИЗАЦИЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И РЕМОНТА ЭЛЕКТРИЧЕСКОГО И ЭЛЕКТРОМЕХАНИЧЕСКОГО ОБОРУДОВАНИЯ» МДК 01.03 «ЭЛЕКТРИЧЕСКОЕ И ЭЛЕКТРОМЕХАНИЧЕСКОЕ ОБОРУДОВАНИЕ» 13.02.11 «Техническая эксплуатация и обслуживание электрического и электромеханического оборудования» Студент подпись И.О.Фамилия ________.__.20__ г. Оценка выполнения и защиты курсовой работы ____________ Руководитель подпись ________________.__.20__ г. Москва, 20__ 61 Приложение 2 Форма календарного плана выполнения курсовой работы/проекта НАЗВАНИЕ ОО КАЛЕНДАРНЫЙ ПЛАН выполнения курсового проекта Студентом___курса_______группы __________________________________________ Ф.И.О. По теме _________________________________________________________________ __________________________________________________________________________ № этапа работы Содержание этапов работы Плановый Отметка о срок выполнении выполнения этапа этапа Студент подпись Фамилия И.О. 00.00.2000 г. Руководитель подпись Фамилия И.О. 00.00.2000 г. 62 Примерная тематика курсовых работ по МДК.01.03 «Электрическое и электромеханическое оборудование» 1. Электрооборудование грунтового насоса 2. Электрооборудование горизонтального насосы Д, 1Д, 2Д 3. Электрооборудование шестерного насоса 4. Электрооборудование шиберных и шиберно-роликовых насосов 5. Электрооборудование поршневого насоса 6. Электрооборудование химического полупогружного насоса ХП, ТХИ, АХП, АХПО. 7. Электрооборудование вакуумного насоса 8. Электрооборудование центробежного секционного насоса 9. Электрооборудование вентиляционной установки цеха металлорежущих станков 10.Электрооборудование дутьевого вентилятора 11.Электрооборудование крышного вентилятора 12.Электрооборудование компрессорной установки 13.Электрооборудование токарно-револьверного станка 14.Электрооборудование больничного лифта 15.Электрооборудование грузового лифта 16.Электрооборудование панорамного лифта 17.Электрооборудование строительного подъемника 18.Электрооборудование пластинчатого конвейера 19.Электрооборудование ленточного конвейера 20.Электрооборудование гравитационного роликового конвейера 21.Электрооборудование ковшового конвейера 22.Электрооборудование эскалаторов 23.Электрооборудование электрической печи сопротивления 63