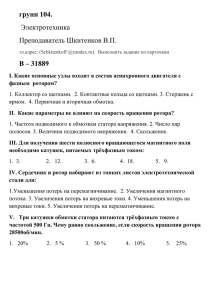
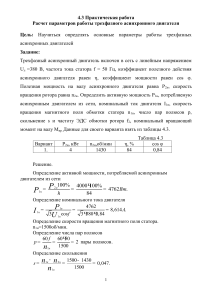
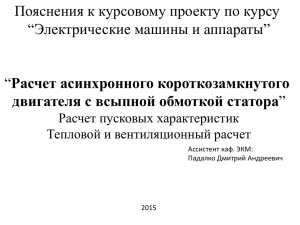
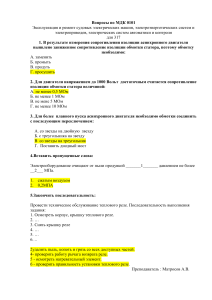
К27 - приведенное активное сопротивление цепи обмотки ротора к цепи обмотке статора; Х2ст - приведенное индуктивное сопротивление рассеяния цепи обмотки ротора к цепи обмотке статора; 1о - ток холостого хода (намагничивания); Х т - индуктивное сопротивление контура намагничивания Основные уравнения асинхронного двигателя, соответствующие данной схеме: Е ' 1Ф — Е т — ] • Х 1 • 1 1 — К [ • 1 1 = 0 Е т + У • Х2 • 12 + Е 2 • 12 / Я = 0 1 1 +1 2 — I о = 0 Векторная диаграмма токов, ЭДС и напряжений изображена на рисунке 20: п ян 60-/ 0= Р П0 — н п п 0 60-5° = 1500 рад 2 с 1500 —1465 1500 0,023о.е. Рисунок 20 - Векторная диаграмма асинхронной машины 4.1.1 Найдем синхронную частоту вращения и номинальное скольжение: 48 4.1.2 Найдем ток холостого хода асинхронного двигателя: / ! )2 11 - (рж ' 71н ' 1 Р 01 (р. - жн 3 У Сда ' 1н ' Фрж ' Пнрж 1 ж 1р ж ' ^н где - \2 1 - р * Я ' жн 0,75 • 37000 3 • 220 • 0,861 • -53А - ток статора 0,92 двигателя при частичной загрузке, где п - п - 0,92о.е. - КПД при частичной загрузке, нрж н мощности при частичной загрузке, где 0,87'0,98 - 0,85о.е.СОХф - СОХф ' рж коэффициент Рисунок 21 - Зависимость еоз ф0 75 /соз ф н от мощности асинхронного С08фо.75/со8фн= 0,98 - относительный коэффициент мощности при частичной загрузке (из графика на рис. 21), двигателя статора двигателя 37000 /1н 3^ ' со^ф' пн 3'220'0,85 - 0,92 1н н - 70А - номинальный ток 49 1 7 0- \\1 - (рж ' 71н ' 1 н \2 1р ж ' 5н 1 5 - н л2 ж 1 - Рж • 5н' 9 1 - 0 02 ? 54,32 -(0,75• 71,7 --------------- , ------- )2 1 - 0,75 • 0,02 = 14,09А 1(р 1 - (0,75 •—1 0,02—)2 1 - 0,75 • 0,02 4.1.3 Из формулы Клосса определим соотношение для расчета критического скольжения. В первом приближении принимаем р = 1 5 2 - 2 • 5 'Р' (к^ -1)] к— + л 1к— 2 - [1 н тах шах V тах к= н' 2 3,5 + ^3,5 - [11 - 22'5- н0,023 ' р' (к-1 1) т - (3,5 -1)] тах 5 0,179 о.е. 0,023 '■ 1 - 2'0,023'1' (3,5 -1) 4.1.4 Найдем значения коэффициентов: С1 = 1 + ( /л 0 14 09 ) = 1 + ( ---- , ----- ) = 1,013о.е.; 2 к 7 ' 1' 1н '2'7,5'70' н А = т' Щ -----------------------------1 1н 2 С к ' 1' тах ' Рн 1 - 0,023 0,54 о.е. 2'1,013'3,5'37000 4.1.5 Теперь можно определить активное сопротивление ротора, приведенное к обмотке статора асинхронного двигателя: А 0,54 1 = 0,081Ом 1 1 2 (Р + —)' С (1 + -------------- )' 1,013 5 1 0,179 к 4.1.6 Активное сопротивление обмотки статора: К= 9 К = С ' К2 ' в = 1,013'0,081'1 = 0,082Ом 50 4.1.7 Определим параметр у, который позволяет найти индуктивное сопротивление короткого замыкания х кн' К-Л-) - в = К-^-) -1 = 5,51о.е. У= 2 5К2 2 V °,1792 4.1.8 Найдем значение индуктивного сопротивления короткого замыкания: хКн = У' С ' К2' = 5,51 ■ 1,013 • 0,081 = 0,451Ом 4.1.9 Найдем индуктивное сопротивление роторной обмотки, приведенное к статорной: х' 2н х о 451 = 0,58 ■ -^ = 0,58 ■ -2 ------= 0,258 Ом С 1,013 4.1.10 Найдем индуктивное сопротивление статорной обмотки: X = 0,42 ■ х = 0,42 ■ 0,451 = 0,19Ом 4.1.11 По найденным значениям Сь К2/ и х определим критическое 5 к1 = С ■ й2 К 2 1 + хкн2 1,013 ■ 0,081 ^ 0,0822 + 0,4512 = 0,179 о.е. скольжение: Рассчитанные значения ^ и ^ равны. 4.1.12 Для того чтобы найти ЭДС ветви намагничивания найдем 81п ф: ф = агссо8(со8ф) = агссо8(0,87) = 0,516 81п ф = 0,493 4.1.13 Найдем ЭДС ветви намагничивания Е , наведенную потоком воздушного зазора в обмотке статора в номинальном режиме: 51 Е= • /1н)2 + (^1н • я п ф - х 1н • / 1н )2 = н • созФ- = 7(220 ■ 0,87 - 0,082 • 70)2 + (220 • 0,493 - 0,19 ■ 70)2 = 208,64 В 4.1.14 Тогда индуктивное сопротивление 14,09 = 14,803 Ом ■V 10 намагничивания: Е1 208,64 4.2 Расчет и построение естественной механической и электромеханической характеристик АД 4.2.1. Найдем синхронную угловую скорость: ю= 0 р = 2 • 3 1 4 • 5 0 = 157,08 рад 2 с 4.2.2. Рассчитаем и построим естественную электромеханическую характеристику: 11 (ю) = ^//02 + Г2 (ю)2 + 2 • /0 • /2 (ю) • 31П ф2 , где /2 (ю) - значение приведенного тока ротора от скольжения; IIХ1н КН 1281П^2 = К2 2 2 к а К + (^1 +2 х ) (х х — — — ) ++ К1н Н + 2н) ( ю - ю ю-ю 0 0 1 ю 0 1 ю 0 По вышеприведенным формулам рассчитывается естественная электромеханическая характеристика, приведенная на рисунке 22: 52 М (ю) = 3и ' 1н • К2 ю—ю К ю [(К 0• ю -• 1+ ю— - ) + * кн] 0 0 ю Рисунок 22 - Естественная электромеханическая характеристика асинхронного двигателя. 4.2.3. Рассчитаем и построим естественную механическую характеристику по следующей формуле: ю 0 4. 2.4. Рассчитаем контрольные точки механической характеристики по паспортным данным: Номинальная скорость: юн = ю0 • (1 — ) = 157,08 • (1 — 0,023) = 153,46 рад/с; Р 3700Момент номинальный: Мном = ном = ----------------- = 241,177 Н • м; ном юном 153,94 Момент критический: Мкр = Мном • кмакс = 241,177 • 3,5 = 844,119Нм; Момент пусковой: Мп = 2 • Мкр • = 2 • 844,119 • 0,179 = 302,19 Нм. 53 Рисунок 23 - Естественная механическая характеристика асинхронного двигателя 5. Система автоматического управления электропривода 5.1 Скалярное управление. Закон Костенко До середины 70-х годов прошлого столетия скалярное частотное управление было основным видом управления, используемым в автоматизированном асинхронном электроприводе. Но и в настоящее время, несмотря на конкуренцию с векторными способами управления, оно довольно широко распространено, т.к. позволяет решать многие технические задачи массового электропривода проще и эффективнее. Это относится в первую очередь к приводам с малым диапазоном регулирования и низкими требованиями к динамике. Термин скалярное управление связан с тем, что оно базируется на изменении скалярных величин, определяющих электромагнитный момент АД (частоты, напряжения, токов и магнитных потоков). Физической основой скалярных способов управления являются электромагнитные процессы в АД, возникающие при изменении этих величин. 54 Для обеспечения работоспособности привода при скалярном частотном управлении необходимо задать функциональную связь между каналами управления напряжением и частотой питания статора, называемую законом управления. В 1925 академик Михаил Полиевктович Костенко сформулировал общий закон, обеспечивающий оптимальные условия работы двигателя в следующей форме: чтобы обеспечить оптимальный режим работы АД при всех значениях частоты и нагрузки, необходимо относительное напряжение двигателя изменять пропорционально произведению относительной частоты на корень квадратный из относительного момента двигателя. Этот закон частотного управления можно записать уравнением Цк=/ МС ^ж /ш \ МН Закон Костенко можно получить из следующих элементарных соображений. Если предположить, что коэффициент перегрузочной способности при регулировании остается постоянным, то критический момент, зависящий от квадрата величины магнитного потока, также должен оставаться постоянным и отношение моментов при двух различных частотах будет равно. Условия работы АД в рассматриваемом режиме М.П. Костенко формулирует так: «Если сконструировать асинхронный двигатель для частоты Л1и момента Ми и напряжения на зажимах и1Н и изменять затем при новом значении момента М напряжение У1 и частоту / таким образом, чтобы удовлетворялось соотношение, то двигатель будет работать при практически неизменных сов^, коэффициенте перегружаемости и абсолютном скольжении, а его к.п.д. будет зависеть только от изменения 55