Д.Л. ПИОТРОВСКИЙ, А.В. ГОНЧАРОВ, К.Е. БРАТЦЕВ, С.В. АНТОНОВ
ТЕОРИЯ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ.
ПРАКТИКУМ
ИСПОЛЬЗОВАНИЕМ SIMINTECH. ЧАСТЬ 2. НЕЛИНЕЙНЫЕ САУ
С
УЧЕБНОЕ ПОСОБИЕ
Москва
Издательство *******
2024
3
Д.Л. ПИОТРОВСКИЙ, А.В. ГОНЧАРОВ, К.Е. БРАТЦЕВ, С.В. АНТОНОВ
ТЕОРИЯ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ.
ПРАКТИКУМ
ИСПОЛЬЗОВАНИЕМ SIMINTECH. ЧАСТЬ 2. НЕЛИНЕЙНЫЕ САУ
С
УЧЕБНОЕ ПОСОБИЕ
Москва
Издательство *******
2024
4
.Л. ПИОТРОВСКИЙ, А.В. ГОНЧАРОВ, К.Е. БРАТЦЕВ, С.В. АНТОНОВ
ТЕОРИЯ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ.
ПРАКТИКУМ
ИСПОЛЬЗОВАНИЕМ SIMINTECH. ЧАСТЬ 2. НЕЛИНЕЙНЫЕ САУ
С
УЧЕБНОЕ ПОСОБИЕ
Москва
Издательство *******
2024
5
ОГЛАВЛЕНИЕ
Практическое занятие № 5 «Расчет настроек ПИД-регулятора различными
методами»..................................................................................................................... 3
Практическое занятие № 6 «Синтез каскадной системы регулирования».......... 32
Практическое занятие № 7 «Синтез инвариантной системы регулирования» ... 38
Практическое занятие № 8 «Исследование характеристик типовых нелинейных
элементов».................................................................................................................. 45
Практическое занятие № 9 «Изучение влияния нелинейности объекта на расчет
и качество САР» ........................................................................................................ 57
Практическое занятие № 10 «Сравнительный анализ работы линейной и
нелинейной САР» ...................................................................................................... 71
Практическое занятие № 11 «Исследование автоколебаний в нелинейной САР»
..................................................................................................................................... 79
Список источников и литературы ........................................................................... 88
Приложение А............................................................................................................ 89
6
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 5
«РАСЧЕТ НАСТРОЕК ПИД-РЕГУЛЯТОРА РАЗЛИЧНЫМИ
МЕТОДАМИ»
Цель работы — изучить методики расчета настроек ПИД-регулятора в
составе одноконтурной системы автоматического регулирования (САР)
методами Копеловича, Ziegler-Nichols, СHR (Chien, Hrones, Reswick), Куна,
ручной настройки; провести сравнительный анализ качества регулирования в
системе с ПИД-регулятором, рассчитанным различными методами.
Описание работы
Наиболее универсальным регулятором, применяемым в промышленных
контроллерах, является регулятор, формирующий одновременно как П-, И-, так
и Д-закон регулирования. С его помощью можно перейти к любому простому
закону, обнулив ту или иную составляющую. Такие регуляторы называются
пропорционально-интегрально-дифференциальными или, сокращенно,
ПИД-регуляторами. Они обеспечивают высокое качество регулирования,
обладают высоким быстродействием и устраняют статическую ошибку
регулирования, поддается оптимизации настроек на различные критерии
качества регулирования.
ПИД-регуляторы оказывают воздействие на регулирующий орган
пропорционально отклонению регулируемой величины от задания 𝜀(𝑡),
интегралу от отклонения регулируемой величины и дифференциалу от
отклонения регулируемой величины. Аддитивная форма записи уравнения
работы ПИД-регулятора, при которой настройки не зависят друг от друга, имеет
вид (1):
𝑢(𝑡) = 𝐾р 𝜀(𝑡) +
1
𝑡
𝑑𝜀(𝑡)
∫ 𝜀(𝑡)𝑑𝑡 + 𝑇д 𝑑𝑡 .
𝑇 0
и
(1)
𝐾р называют коэффициентом усиления регулятора, постоянные 𝑇и и 𝑇д
называют постоянными времени интегрирования и дифференцирования
соответственно. Производную
𝑑𝜀(𝑡)
𝑑𝑡
вводят в закон регулирования для
повышения качества процесса регулирования. Д-составляющая уменьшает
инерционность САР. На высоких частотах в начале переходного процесса
благодаря Д-составляющей регулятор имеет высокое усиление, а на низких
частотах в установившемся режиме благодаря И-составляющей устраняет
статическую ошибку. При этом Д-составляющая на низких частотах в
установившемся режиме повышает чувствительность к шумам и пульсациям
входного сигнала.
7
Передаточная функция ПИД-регулятора с независимыми настройками
определяется соотношением (2):
𝑊(𝑠) = 𝐾р +
1
𝑇и ∙𝑠
+ 𝑇д ∙ 𝑠.
(2)
Мультипликативная форма записи уравнения работы ПИД-регулятора с
зависимыми настройками имеет вид (3):
𝑢(𝑡) = 𝐾р (𝜀(𝑡) +
Постоянную 𝑇пр =
𝑇д
𝐾𝑝
1
𝑇из
𝑡
𝑑𝜀(𝑡)
∫0 𝜀(𝑡)𝑑𝑡 + 𝑇пр 𝑑𝑡 ).
(3)
называют временем предварения
Постоянную 𝑇из = 𝐾р 𝑇и называют временем изодрома.
Передаточная функция ПИД-регулятора с зависимыми настройками
определяется соотношением (4):
𝑊(𝑠) = 𝐾р (1 +
1
𝑇из ∙𝑠
+ 𝑇пр ∙ 𝑠).
(4)
Соответствующий график зависимости управляющего воздействия ПИДрегулятора от времени показан на рис. 1.
Рисунок 1. Переходная характеристика ПИД-регулятора
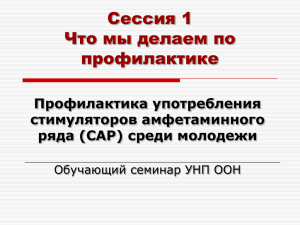
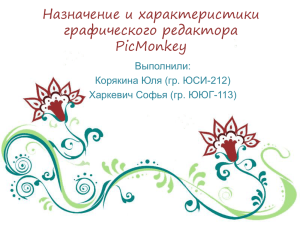
По структуре ПИД-регулятор эквивалентен параллельному соединению Прегулятора, И-регулятора и Д-регулятора (рис. 2).
а)
б)
Рисунок 2. Структурная схема ПИД-регулятора: а — с независимыми настройками
(аддитивная форма); б — с зависимыми настройками (мультипликативная форма)
8
Существует множество методов настройки ПИД-регуляторов. Их можно
разделить на две основные группы: точные и приближенные. К точным можно
отнести метод логарифмических частотных характеристик (ЛЧХ). К
приближенным методам можно отнести методы Копеловича, Ziegler-Nichols,
CHR (Chien, Hrones, Reswick), метод Куна, метод ручной настройки.
Метод Копеловича
С его помощью ПИД-регулятор можно настроить на три типовых
переходных процесса — апериодический с минимальным 𝑡р , с 20%-м
перерегулированием, с 40%-м перерегулированием (минимальной квадратичной
оценкой).
При этом предварительно необходимо аппроксимировать кривую разгона
объекта управления апериодическим звеном 1-го порядка с запаздыванием:
𝑊оу (𝑠) =
𝑘оу
𝑇оу 𝑠+1
𝑒 −𝜏оу𝑠 .
Для аппроксимации используют либо графический способ нахождения 𝑘оу ,
𝑇оу , 𝜏оу , заключающийся в дополнительных построениях на полученной кривой
разгона либо интерполяционные способы определения параметров объекта
управления, например, по методу Ормана:
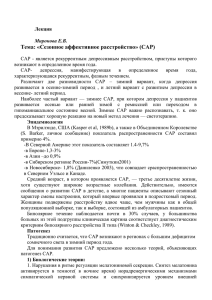
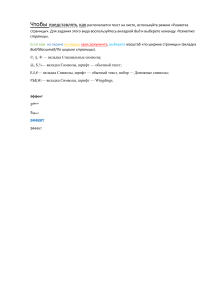
1) по кривой разгона объекта управления (рис. 3) находят значения 𝑦1 и 𝑦2 :
𝑦1 = 0,33(𝑦(∞) − 𝑦(0)) + 𝑦(0),
𝑦2 = 0,7(𝑦(∞) − 𝑦(0)) + 𝑦(0);
2) проведя перпендикуляры к кривой разгона, определяют значения 𝑡1 ′ и 𝑡2 ′;
3) определяют значения 𝑡1 и 𝑡2 по формулам (5) и (6) соответственно:
𝑡1 = 𝑡1′ − 𝑡0 ,
(5)
′
𝑡2 = 𝑡2 − 𝑡0 ;
(6)
4) определяют значения времени запаздывания 𝜏оу и постоянной времени
𝑇оу по формулам (7) и (8):
𝜏оу = 0,5(3𝑡1 − 𝑡2 ),
(7)
𝑇оу = 1,25(𝑡2 − 𝑡1 );
(8)
5) коэффициент усиления 𝑘оу определяется отношением приращений
выходной величины объекта 𝛥𝑦 к величине входного воздействия на объект 𝛥𝑔
по формуле (9):
𝑘𝑜𝑦 =
∆𝑦
∆𝑔
.
(9)
9
Рисунок 3. Аппроксимация по методу Ормана
По найденному отношению 𝜏оу /𝑇оу объекта управления определяют
настройки регулятора либо по известным номограммам Копеловича, либо по
расчетным формулам (табл. 1).
Таблица 1. Формулы расчета приближенных настроек ПИД-регулятора с
зависимыми настройками методом Копеловича
Тип переходного процесса
Регулятор
ПИД
Апериодический с
min 𝑡р
𝐾р
0,95
𝐾oy 𝜏oy
𝑇oy
𝑇из
𝑇пр
2,4𝜏оу
0,4𝜏оу
20 %-е
перерегулирование
𝐾р
1,2
𝐾oy 𝜏oy
𝑇oy
𝑇из
𝑇пр
2𝜏оу
0,4𝜏оу
min ∫ 𝑒 2 (𝑡)𝑑𝑡
𝐾р
1,4
𝐾oy 𝜏oy
𝑇oy
𝑇из
𝑇пр
1,3𝜏оу
0,5𝜏оу
Подразумевается, что регулятор имеет зависимые настройки, т.е. по
формулам и номограммам определяются время изодрома 𝑇из и время
предварения 𝑇пр . Дальше нужен пересчет на постоянную времени
интегрирования 𝑇и и дифференцирования 𝑇д .
Метод Ziegler-Nichols (1-й вариант)
Ziegler и Nichols предложили два метода настройки ПИД-регуляторов. Один
из них основан на параметрах отклика объекта на единичный скачок, а другой на частотных характеристиках объекта управления.
10
Суть первого варианта заключается в определении реакции статического
объекта с самовыравниванием с передаточной функцией вида:
𝑘оу
𝑊оу (𝑠) =
𝑒 −𝜏оу𝑠
𝑇оу 𝑠 + 1
на ступенчатое изменение управляющего воздействия. Подходит для объектов
управления не выше второго порядка с запаздыванием.
Полученные значения 𝑘оу , 𝑇оу , 𝜏оу используют для расчета настроек
регулятора по эмпирическим формулам (табл. 2 и 3).
Метод дает удовлетворительные результаты при 0,15 <
𝜏оу
𝑇оу
< 0,6.
Таблица 2. Формулы для расчёта коэффициентов ПИД-регулятора с независимыми
настройками по методу Ziegler–Nichols
Регулятор
𝐾р
ПИД
𝐾step 1,2𝑇
∙
𝐾оу
𝜏
при 𝐾step = 1(𝑡)
1,2𝑇
𝐾оу 𝜏
𝑇и
𝑇д
𝐾оу 𝜏 2
0,6𝑇
0,6𝑇
𝐾оу 𝜏
В этих формулах предполагается, что настраивается регулятор с
независимыми настройками, передаточная функция которого имеет вид (2).
Таблица 3. Формулы для расчёта коэффициентов ПИД-регулятора с зависимыми
настройками по методу Ziegler–Nichols
Регулятор
𝐾р
ПИД
𝐾step 1,2𝑇
∙
𝐾оу
𝜏
при 𝐾step = 1(𝑡)
1,2𝑇
𝐾оу 𝜏
𝑇и
𝑇д
2𝜏
0,5𝜏
В этих формулах предполагается, что настраивается регулятор с
зависимыми настройками, передаточная функция которого имеет вид (4).
Регуляторы, параметры которых рассчитаны по методу Ziegler–Nichols, не
всегда обеспечивают требуемое качество процесса регулирования. Как правило,
требуется дополнительная подстройка их параметров. Несмотря на это, метод
11
Ziegler–Nichols и некоторые его модификации весьма популярны, и многие
производители регуляторов рекомендуют их для настройки регуляторов.
Параметры регулятора в методе Ziegler–Nichols определяются, исходя из
требования к декременту затухания, равному 4, что дает медленное затухание
процесса. При этом метод никак не учитывает требования к запасу устойчивости
системы.
Метод Ziegler-Nichols (2-й вариант)
Основан на использовании запасов устойчивости и заключается в выводе
САР с П-регулятором на режим незатухающих колебаний (на границу
устойчивости).
В случае ПИД-регулятора сначала необходимо отключить интегральную и
дифференциальную составляющую, сделав 𝑇и = ∞ и 𝑇д = 0. Далее задать
некоторое небольшое значение для 𝐾р , например 0,01. Постепенно увеличивать
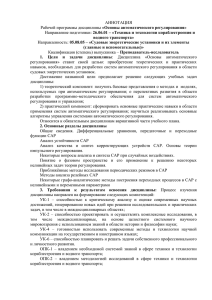
𝐾р до момента достижения в системе установившихся незатухающих
устойчивых колебаний с постоянной амплитудой (рис. 4).
Рисунок 4. График переходного процесса с незатухающими колебаниями
Полученные значения коэффициента усиления 𝐾р ∗ = 𝐾кр и периода
колебаний 𝑇 ∗ = 𝑇кр используются для расчета настроек регулятора по
эмпирическим формулам (табл. 4 и 5).
Таблица 4. Формулы расчета приближенных настроек ПИД-регулятора с
зависимыми настройками методом Ziegler–Nichols
Регулятор
𝐾р
𝑇и
𝑇д
ПИД
0,6𝐾р∗
0,5𝑇 ∗
0,125𝑇 ∗
12
Таблица 5. Формулы расчета приближенных настроек ПИД-регулятора с
независимыми настройками методом Ziegler–Nichols
Регулятор
𝐾р
ПИД
0,6𝐾р∗
𝑇и
𝑇∗
1,2𝐾р∗
𝑇д
0,075𝐾р∗ 𝑇 ∗
После вывода системы на границу колебательной устойчивости необходимо
зафиксировать максимальный для данной системы коэффициент 𝐾р ∗ = 𝐾кр и
замерить период колебаний 𝑇 ∗ = 𝑇кр (время одного полного цикла).
Также этим методом можно рассчитать настройки ПИД-регулятора
аналитически при известной модели объекта управления или снятой
экспериментально АФЧХ.
Если объект управления описывается передаточной функцией вида:
𝑊(𝑠) =
𝑎𝑛 𝑠 𝑛 +𝑎𝑛−1 𝑠 𝑛−1 +⋯+𝑎1 𝑠+𝑎0
𝑏𝑚 𝑠 𝑚 +𝑎𝑏𝑚−1 𝑠 𝑚−1 +⋯+𝑏1 𝑠+𝑏0
, при 𝑚 > 𝑛.
Тогда передаточная функция разомкнутой системы с П-регулятором будет
иметь вид: 𝑊рс (𝑠) = 𝐾р ∙ 𝑊(𝑠)
Подставляя в место 𝑠 = 𝑗𝜔, получаем (10):
𝑊рс (𝑗𝜔) = 𝐾р ∙ 𝑊(𝑗𝜔) = 𝑅𝑒(𝜔) + 𝑗𝐼𝑚(𝜔).
(10)
Замкнутая система будет находиться на границе устойчивости, т.е. в
системе установятся колебания с постоянной амплитудой, когда АФЧХ будет
точно проходить через точку с координатами (−1; 𝑗0).
Тогда, решая систему уравнений (11):
𝑅𝑒(𝜔) = −1,
{
(11)
𝐼𝑚(𝜔) = 0,
можно определить критическое значение 𝐾р∗ коэффициента усиления Прегулятора и критическую частоту 𝜔кр . Зная критическую частоту, можно
определить период колебаний 𝑇 ∗ =
2𝜋
𝜔кр
. Дальнейший расчет настроек регулятора
произвести по табл. 4 и 5.
Также из уравнения 𝜑(𝜔) + 𝜋 = 0 можно определить значение критической
частоты ωКР, на которой сдвиг фаз в разомкнутом контуре достигает 180°, а из
уравнения 𝐾р∗ =
1
𝐴(𝜔кр )
найти критическое значение 𝐾р∗ коэффициента усиления
П-регулятора. Зная критическую частоту, можно определить период колебаний
𝑇∗ =
2𝜋
𝜔КР
. Дальнейший расчет настроек регулятора нужно произвести по
табл. 4 и 5.
13
Недостаток метода — необходимость выводить САР на границу
устойчивости, что для многих объектов делать не рекомендуется. Медленное
затухание переходного процесса, что соответствует практическому отсутствию
запаса устойчивости. Подходит для объектов управления 3-го порядка и выше.
Метод CHR
В отличие от методов Ziegler-Nichols, которые используют в качестве
критерия качества настройки декремент затухания, равный 4, Chien, Hrones и
Reswick (CHR) использовали критерий максимальной скорости нарастания при
отсутствии перерегулирования или при наличии не более чем 20%-го
перерегулирования. Такой критерий позволяет получить больший запас
устойчивости, чем в методе Ziegler-Nichols.
Метод CHR также использует аппроксимацию объекта управления звеном
1-го порядка с запаздыванием 𝑊оу (𝑠) =
𝑘оу
𝑇оу 𝑠+1
𝑒 −𝜏оу𝑠 .
CHR метод дает две разные системы параметров регулятора. Одна из них
получена при наблюдении отклика на изменение задания (табл. 6), вторая при наблюдении отклика на внешние возмущения (табл. 7). Какую систему
параметров выбирать, зависит от того, что важнее для конкретного регулятора:
качество регулирования при изменении задания или ослабление внешних
воздействий.
Таблица 6. Формулы расчета приближенных настроек ПИД-регулятора с
независимыми настройками методом CHR при возмущении по заданию
Регулятор
ПИД
Тип переходного процесса
без перерегулирования
20 %-е перерегулирование
𝐾р
𝐾р
𝑇д
𝑇д
𝑇и
𝑇и
0,6𝑇oy
0,95𝑇oy
𝜏oy
0,5𝜏oy
1,35𝜏oy 0.47𝜏oy
𝜏oy 𝐾oy
𝜏oy 𝐾oy
Таблица 7. Формулы расчета приближенных настроек ПИД-регулятора с
независимыми настройками методом CHR при действии внешнего возмущения
Регулятор
ПИД
Тип переходного процесса
Без перерегулирования
20 %-е перерегулирование
𝐾р
𝐾р
𝑇д
𝑇д
𝑇и
𝑇и
1,2𝑇oy
0,95𝑇oy
2,4𝜏oy
0,42𝜏oy
2𝜏oy
0,42𝜏oy
𝜏oy 𝐾oy
𝜏oy 𝐾oy
14
В этих формулах предполагается, что настраивается регулятор с
независимыми настройками, передаточная функция которого имеет вид (2).
Метод Куна (правило «Т-суммы»)
В методе вводится суммарная постоянная времени Т∑ , которая
характеризует быстродействие любого объекта.
Особенностью метода является возможность использования как
передаточной функции объекта управления, так и переходной характеристики на
входное ступенчатое воздействие.
Для объекта с передаточной функцией в общем виде:
𝑊𝑜𝑦 (𝑠) =
𝐾𝑜𝑦 (1+𝑇д1 𝑠)(1+𝑇д2 𝑠)…(1+𝑇д𝑛 𝑠)
(𝑇𝑜𝑦1 𝑠+1)(𝑇𝑜𝑦2 𝑠+1)…(𝑇𝑜𝑦𝑚 𝑠+1)
𝑒 −𝜏𝑜𝑦𝑠 .
Cуммарная постоянная времени 𝑇∑ определяется по выражению (12):
𝑇∑ = 𝑇𝑜𝑦1 + 𝑇𝑜𝑦2 + ⋯ + 𝑇𝑜𝑦𝑚 − 𝑇д1 − 𝑇д2 − ⋯ − 𝑇д𝑛 − 𝜏𝑜𝑦 .
(12)
Метод Куна включает два вида настройки: быструю и нормальную (табл. 8).
Быстрая применима для систем с объектами первого или второго порядка, а
нормальная («осторожная», «медленная») настройка почти всегда дает
«хорошие» результаты для систем с объектами более высокого порядка.
Таблица 8. Формулы расчета приближенных настроек ПИД-регулятора с
зависимыми настройками методом Куна
Регулятор
ПИД
Нормальная
настройка
Быстрая
настройка
𝐾р
𝑇из
𝑇пр
𝐾oy
0,66𝑇∑
0,17𝑇∑
0,5𝐾oy
0,8𝑇∑
0,12𝑇∑
В этих формулах предполагается, что настраивается регулятор с
зависимыми настройками, передаточная функция которого имеет вид (4).
Метод ручной настройки.
В ряде случаев расчет параметров регулятора по формулам не может дать
оптимальной настройки, поскольку аналитически полученные результаты
основываются на сильно упрощенных моделях объекта. В частности, в них не
учитывается всегда присутствующая нелинейность типа "ограничение" для
управляющего воздействия. Кроме того, модели используют параметры,
идентифицированные с некоторой погрешностью. Поэтому после расчета
параметров регулятора желательно сделать его подстройку. Подстройку можно
выполнить на основе правил, которые используются для ручной настройки. Эти
15
правила получены из опыта, теоретического анализа и численных
экспериментов. Они сводятся к следующему:
увеличение
пропорционального
коэффициента
увеличивает
быстродействие и снижает запас устойчивости;
с уменьшением интегральной составляющей ошибка регулирования с
течением времени уменьшается быстрее;
уменьшение
постоянной
интегрирования
уменьшает
запас
устойчивости;
увеличение дифференциальной составляющей увеличивает запас
устойчивости и быстродействие.
Стоит отметить, что применение правил возможно только после
предварительной настройки регулятора по формулам. Попытки настроить
регулятор без начального приближенного расчета коэффициентов могут быть
безуспешными. Сформулированные выше правила справедливы только в
окрестности оптимальной настройки регулятора. Вдали от нее эффекты могут
быть иными.
Порядок выполнения практического занятия
1. Запустите среду SimInTech.
2. Создайте новый проект «Файл → Новый проект → Схема модели
общего вида».
3. Настройте расчетные параметры схемы. Установите Начальный шаг
интегрирования startstep = 0, Конечное время расчета endtime = 500
(выбирается из соображения того, чтобы переходные процессы успевали
завершиться), Максимальный шаг hmax = 0.1.
4. Перед продолжением работы сохраните схему в файл с новым именем в
своей рабочей папке. Для этого в Главном меню выбрать пункт «Файл →
Сохранить проект как...» и далее, используя стандартный диалог, сохранить
файл, указав соответствующий путь и имя файла — «Работа САУ 5.prt».
5. Соберите расчетную схему одноконтурной САР с ПИД-регулятором
(рис. 5). Для этого на Схемное окно SimInTech поместите следующие блоки:
генератор постоянного сигнала - 1 шт. (вкладка Источники →
Константа);
генератор ступенчатого сигнала - 1 шт. (вкладка Источники →
Ступенька);
апериодическое звено - 4 шт. (вкладка Динамические → Инерционное
звено 1-го порядка);
16
усилительное звено - 3 шт. (вкладка Операторы → Усилитель);
интегрирующее звено - 1 шт. (вкладка Динамические → Интегратор);
дифференцирующее звено - 1 шт. (вкладка Динамические →
Производная);
суммирующий элемент - 1 шт. (вкладка Операторы → Сумматор);
сравнивающее - 1 шт. (вкладка Операторы → Сравнивающее
устройство);
график -1 шт. (вкладка Вывод данных → Временной график).
Рисунок 5. Расчетная схема для исследования работы одноконтурной САР с ПИДрегулятором
В свойствах блока Константа задайте Значение a = [1], Тип данных
src_type = [double], Название txt = [k].
В свойствах блока Ступенька задайте Время срабатывания t = [время,
через которое завершается переходный процесс при отработке возмущения
по заданию], Начальное состояние y0 =[0], Конечное состояние yk = [1].
В свойствах блока Инерционное звено 1-го порядка задайте
Коэффициенты усиления, Постоянные времени согласно своему варианту из
табл. 3 практического занятия № 4 [1. С. 62], Начальные условия x0 = [0].
Повторите аналогичную процедуру для остальных Инерционных звеньев 1-го
порядка.
Чтобы добавить дополнительные входы в блоке Сумматор, в свойствах
блока задайте Весовые коэффициенты для каждого из входов a = [1, 1, 1, 1].
6. Определите параметры настройки ПИД-регулятора по методу
Копеловича.
17
Для этого предварительно необходимо аппроксимировать объект
управления апериодическим звеном 1-го порядка с запаздыванием
𝑊oy (𝑠) =
𝑘𝑜𝑦
𝑇oy 𝑠+1
𝑒 −𝜏oy𝑠 . Воспользуйтесь результатами аппроксимации для своего
варианта из практического занятия № 4 [1].
Полученные ранее значения 𝑘об , 𝜏об , 𝑇об используйте для расчета ПИДрегулятора по формулам из табл. 1 на процесс с минимальным временем
регулирования.
Для получения значения коэффициента 𝐾𝑖 при интегральной составляющей
и значения коэффициента 𝐾𝑑 при дифференциальной составляющей нужно
воспользоваться формулами пересчета:
𝐾𝑖 =
1
𝑇И
=
𝐾р
𝑇из
,
𝐾𝑑 = 𝑇д = 𝑇пр 𝐾р .
Введите настройки ПИД-регулятора, найденные по методу Копеловича, в
расчетную схему (рис. 5). Для этого в свойствах верхнего блока Усилитель
задайте Коэффициент усиления a = [расчетное значение 𝐾𝑝 ]. В свойствах
среднего блока Усилитель задайте Коэффициент усиления a = [расчетное
значение 𝐾𝑖 ]. В свойствах нижнего блока Усилитель задайте Коэффициент
усиления a = [расчетное значение 𝐾𝑑 ].
Получите график переходного процесса в САР по заданию и по внешнему
возмущению, запустив схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9.
Распечатайте полученный график. Обработайте его и найдите показатели
качества САР при отработке возмущения по заданию и при отработке внешнего
возмущения, используя формулы из практического занятия № 4 [1]. Результаты
занесите в сводную табл. 9.
7. Определите параметры настройки ПИД-регулятора по методу ZieglerNichols 1, используя реакцию объекта на единичное ступенчатое воздействие.
Для этого предварительно необходимо аппроксимировать объект
управления апериодическим звеном 1-го порядка с запаздыванием
𝑊oy (𝑠) =
𝑘oy
𝑇oy 𝑠+1
𝑒 −𝜏oy𝑠 . Воспользуйтесь результатами аппроксимации для своего
варианта из практического занятия № 4 [1].
Полученные ранее значения 𝑘об , 𝜏об , 𝑇об используйте для расчета ПИДрегулятора по формулам из табл. 2.
18
Для получения значения коэффициента 𝐾𝑖 при интегральной составляющей
и значения коэффициента 𝐾𝑑 при дифференциальной составляющей нужно
воспользоваться формулами пересчета:
1
𝐾𝑖 = ,
𝑇и
𝐾𝑑 = 𝑇д .
Введите настройки ПИД-регулятора, найденные по методу Копеловича, в
расчетную схему (рис. 5). Для этого в свойствах верхнего блока Усилитель
задайте Коэффициент усиления a = [расчетное значение Kp]. В свойствах
среднего блока Усилитель задайте Коэффициент усиления a = [расчетное
значение Ki]. В свойствах нижнего блока Усилитель задайте Коэффициент
усиления a=[расчетное значение Kd].
Получите график переходного процесса в САР по заданию и по внешнему
возмущению, запустив схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9.
Распечатайте полученный график. Обработайте его и найдите показатели
качества САР при отработке возмущения по заданию и при отработке внешнего
возмущения, используя формулы из практического занятия № 4 [1]. Результаты
занесите в сводную табл. 9.
8. Определите параметры настройки ПИД-регулятора по методу ZieglerNichols 2, используя метод незатухающих колебаний.
Построение АФЧХ, расчет критической частоты 𝜔кр , критического
значения 𝐾р∗ коэффициента усиления П-регулятора и периода колебаний
𝑇∗ =
2𝜋
𝜔КР
будем осуществлять при помощи программы MathCad, а исследование
динамических характеристик - в программе SimInTech.
В рабочем окне MathCad, подставляя вместо 𝑠 = 𝑗𝜔, задайте частотную
передаточную функцию исходного объекта для своего варианта из
практического занятия № 4 [1], состоящего из четырех последовательно
соединенных апериодических звеньев 1-го порядка с запаздыванием:
k1:=0.6
k2:=0.9
k3:=0.7
k4:=2.2.
T1:=2.5
T2:=5.5
T3:=3
T4:=11.
𝑊𝑜𝑦 (𝜔) ≔
𝑘1
∙
𝑘2
∙
𝑘3
∙
𝑘4
.
𝑇1𝜔+1 𝑇2𝜔+1 𝑇3𝜔+1 𝑇4𝜔+1
Постройте АФЧХ разомкнутой системы с П-регулятором (рис. 6):
𝜔 ≔ 0,0 + 0,001. .5,
𝐾кр : = 1,
𝑊𝑝𝑐 (𝜔): = 𝑊𝑜𝑦 (𝜔) ∙ 𝐾кр .
19
Рисунок 6. АФЧХ разомкнутой системы с П-регулятором
Найдите критическую частоту, при которой система будет находиться на
границе устойчивости.
Согласно условию (11), приравняйте к нулю мнимую часть АФЧХ
разомкнутой системы и найдите соответствующий корень:
𝐼𝑚 (𝑊𝑝𝑐 (𝑖 ∙ 𝜔)) = 0,
𝜔кр : = 0.1,
𝑟𝑜𝑜𝑡 (𝐼𝑚 (𝑊𝑜𝑦 (𝑖 ∙ 𝜔кр )) , 𝜔кр ) = 0.22.
Далее найдите критическое значение коэффициента усиления П-регулятора,
при котором:
𝑅𝑒 (𝑊𝑝𝑐 (𝑖 ∙ 𝜔)) = −1,
𝜔кр : = 0.22,
𝐾кр ≔
1
|𝑊𝑜𝑦 (𝑖∙𝜔кр )|
= 6.759,
после чего определите период колебаний:
𝑇кр =
2𝜋
𝜔КР
= 28.56.
Выполните проверку (рис. 7):
𝐾кр ≔ 6.759,
𝑊𝑝𝑐 (𝜔): = 𝑊𝑜𝑦 (𝜔) ∙ 𝐾кр .
20
Рисунок 7. АФЧХ разомкнутой системы с П-регулятором на границе устойчивости
Найденные значения 𝐾кр = 𝐾р∗ , 𝑇кр = 𝑇 ∗ используйте для расчета ПИДрегулятора по формулам из табл. 5.
Для получения значения коэффициента 𝐾𝑖 при интегральной составляющей
и значения коэффициента 𝐾𝑑 при дифференциальной составляющей нужно
воспользоваться формулами пересчета
1
𝐾𝑖 = ,
𝑇и
𝐾𝑑 = 𝑇д .
Введите настройки ПИД-регулятора, найденные по методу Ziegler-Nichols,
в расчетную схему (рис. 5). Для этого в свойствах верхнего блока Усилитель
задайте Коэффициент усиления a = [расчетное значение Kp]. В свойствах
среднего блока Усилитель задайте Коэффициент усиления a = [расчетное
значение Ki]. В свойствах нижнего блока Усилитель задайте Коэффициент
усиления a=[расчетное значение Kd].
Получите график переходного процесса в САР по заданию и по внешнему
возмущению, запустив схему на расчет нажатием кнопки Пуск на Панели
инструментов или клавиши F9.
Распечатайте полученный график. Обработайте его и найдите показатели
качества САР при отработке возмущения по заданию и при отработке внешнего
возмущения, используя формулы из практического занятия № 4 [1]. Результаты
занесите в сводную табл. 9.
21
9. Определите параметры настройки ПИД-регулятора по методу CHR 1 при
наблюдении отклика объекта на преобладающее изменение задания.
Для этого предварительно необходимо аппроксимировать объект
управления апериодическим звеном 1-го порядка с запаздыванием 𝑊𝑜𝑦 (𝑠) =
𝑘𝑜𝑦
𝑇𝑜𝑦 𝑠+1
𝑒 −𝜏𝑜𝑦𝑠 . Воспользуйтесь результатами аппроксимации для своего варианта
из практического занятия № 4 [1].
Полученные ранее значения 𝑘об , 𝜏об , 𝑇об используйте для расчета ПИДрегулятора по формулам из табл. 6 на процесс с 20%-м перерегулированием.
Для получения значения коэффициента Ki при интегральной составляющей
и значения коэффициента Kd при дифференциальной составляющей нужно
воспользоваться формулами пересчета:
1
𝐾𝑖 = ,
𝑇и
𝐾𝑑 = 𝑇д .
Введите настройки ПИД-регулятора, найденные по методу CHR, в
расчетную схему (рис. 5). Для этого в свойствах верхнего блока Усилитель
задайте Коэффициент усиления a = [расчетное значение Kp]. В свойствах
среднего блока Усилитель задайте Коэффициент усиления a = [расчетное
значение Ki]. В свойствах нижнего блока Усилитель задайте Коэффициент
усиления a = [расчетное значение Kd].
Получите график переходного процесса в САР по заданию и по внешнему
возмущению, запустив схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9.
Распечатайте полученный график. Обработайте его и найдите показатели
качества САР при отработке возмущения по заданию и при отработке внешнего
возмущения, используя формулы из практического занятия № 4 [1]. Результаты
занесите в сводную табл. 9.
10. Определите параметры настройки ПИД-регулятора по методу CHR 2
при наблюдении отклика объекта на преобладающие внешние возмущения.
Для этого предварительно необходимо аппроксимировать объект
управления апериодическим звеном 1-го порядка с запаздыванием
𝑊𝑜𝑦 (𝑠) =
𝑘𝑜𝑦
𝑇𝑜𝑦 𝑠+1
𝑒 −𝜏𝑜𝑦𝑠 . Воспользуйтесь результатами аппроксимации для своего
варианта из практического занятия № 4 [1].
Полученные ранее значения 𝑘об , 𝜏об , 𝑇об используйте для расчета ПИДрегулятора по формулам из табл. 7 на процесс с 20%-м перерегулированием.
22
Для получения значения коэффициента Ki при интегральной составляющей
и значения коэффициента Kd при дифференциальной составляющей нужно
воспользоваться формулами пересчета:
1
𝐾𝑖 = ,
𝑇и
𝐾𝑑 = 𝑇д .
Введите настройки ПИД-регулятора, найденные по методу CHR, в
расчетную схему (рис. 5). Для этого в свойствах верхнего блока Усилитель
задайте Коэффициент усиления a = [расчетное значение Kp]. В свойствах
среднего блока Усилитель задайте Коэффициент усиления a = [расчетное
значение Ki]. В свойствах нижнего блока Усилитель задайте Коэффициент
усиления a = [расчетное значение Kd].
Получите график переходного процесса в САР по заданию и по внешнему
возмущению, запустив схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9.
Распечатайте полученный график. Обработайте его и найдите показатели
качества САР при отработке возмущения по заданию и при отработке внешнего
возмущения, используя формулы из практического занятия № 4 [1]. Результаты
занесите в сводную табл. 9.
11. Определите параметры настройки ПИД-регулятора по методу Куна с
быстрой настройкой.
На основе передаточной функции объекта управления согласно своему
варианту определите суммарную постоянную времени и коэффициент усиления:
Т∑ = T1 + 𝑇2 + 𝑇3 + 𝑇4 ,
𝐾𝑜𝑦 = 𝑘1 𝑘2 𝑘3 𝑘4 .
Используя найденные значения T∑ и 𝐾oy , рассчитайте настройки ПИДрегулятора по формулам из табл. 8.
Для получения значения коэффициента Ki при интегральной составляющей
и значения коэффициента Kd при дифференциальной составляющей нужно
воспользоваться формулами пересчета:
𝐾𝑖 =
1
𝑇И
=
𝐾р
𝑇из
,
𝐾𝑑 = 𝑇д = 𝑇пр 𝐾р .
Введите настройки ПИД-регулятора, найденные по методу Куна с быстрой
настройкой, в расчетную схему (рис. 5). Для этого в свойствах верхнего блока
Усилитель задайте Коэффициент усиления a = [расчетное значение Kp]. В
свойствах среднего блока Усилитель задайте Коэффициент усиления
23
a = [расчетное значение Ki]. В свойствах нижнего блока Усилитель задайте
Коэффициент усиления a = [расчетное значение Kd].
Получите график переходного процесса в САР по заданию и по внешнему
возмущению, запустив схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9.
Распечатайте полученный график. Обработайте его и найдите показатели
качества САР при отработке возмущения по заданию и при отработке внешнего
возмущения, используя формулы из практического занятия № 4 [1]. Результаты
занесите в сводную табл. 9.
12. Определите параметры настройки ПИД-регулятора по методу Куна с
нормальной настройкой.
Повторите аналогичные предыдущему пункту действия, только для расчета
параметров ПИД-регулятора используйте формулы из табл. 8 для нормальной
настройки.
Для получения значения коэффициента Ki при интегральной составляющей
и значения коэффициента Kd при дифференциальной составляющей нужно
воспользоваться формулами пересчета:
𝐾р
1
𝐾𝑖 =
=
𝑇И 𝑇из
𝐾𝑑 = 𝑇д = 𝑇пр 𝐾р .
Введите настройки ПИД-регулятора, найденные по методу Куна с
нормальной настройкой, в расчетную схему (рис. 5). Для этого в свойствах
верхнего блока Усилитель задайте Коэффициент усиления a = [расчетное
значение Kp]. В свойствах среднего блока Усилитель задайте Коэффициент
усиления a = [расчетное значение Ki]. В свойствах нижнего блока Усилитель
задайте Коэффициент усиления a = [расчетное значение Kd].
Получите график переходного процесса в САР по заданию и по внешнему
возмущению, запустив схему на расчет нажатием кнопки Пуск на Панели
инструментов или клавиши F9.
Распечатайте полученный график. Обработайте его и найдите показатели
качества САР при отработке возмущения по заданию и при отработке внешнего
возмущения, используя формулы из практического занятия № 4 [1]. Результаты
занесите в сводную табл. 9.
13. Определите параметры настройки ПИД-регулятора методом ручной
настройки, используя рекомендации теоретической части практического
занятия и знания, полученные на лекционных занятиях.
24
В качестве начальных приближений настроек ПИД-регулятора примите
настройки, посчитанные одним из ранее рассмотренных способов.
Введите настройки ПИД-регулятора, найденные по методу ручной
настройки, в расчетную схему (рис. 5). Для этого в свойствах верхнего блока
Усилитель задайте Коэффициент усиления a = [расчетное значение Kp]. В
свойствах среднего блока Усилитель задайте Коэффициент усиления a =
[расчетное значение Ki]. В свойствах нижнего блока Усилитель задайте
Коэффициент усиления a = [расчетное значение Kd].
Получите график переходного процесса в САР по заданию и по внешнему
возмущению, запустив схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9.
Изменяйте один (или сразу несколько коэффициентов) ПИД-регулятора, и
моделируйте работу системы. В зависимости от того, как ведет себя система с
выбранными коэффициентами (недо/перерегулирование), опять изменяйте
коэффициенты. Повторяйте эксперимент, пока не получите оптимальный на ваш
взгляд переходный процесс.
Распечатайте полученный график. Обработайте его и найдите показатели
качества САР при отработке возмущения по заданию и при отработке внешнего
возмущения, используя формулы из практического занятия № 4 [1]. Результаты
занесите в сводную табл. 9.
При подстройке параметров ПИД-регулятора руководствуйтесь рис. 8-10.
Настройка пропорциональной составляющей Кр
Перед настройкой коэффициента пропорциональной составляющей
интегральная и дифференциальная составляющие обычно отключаются,
постоянная времени интегрирования 𝑇и устанавливается максимально
возможной (𝑇и → ∞), а постоянная времени дифференцирования 𝑇д минимально
возможной (𝑇д = 0). Пропорциональная составляющая устанавливается
максимально возможной (рис. 8).
Переходная характеристика типа 1: значение коэффициента усиления Кр
очень велико, переходная характеристика далека от оптимальной. Кр следует
значительно уменьшать.
25
Рисунок 8. Настройка пропорциональной составляющей
Переходная характеристика типа 2: в переходной характеристике
наблюдаются затухающие колебания (5-6 периодов). Если в дальнейшем
предполагается использовать и дифференциальную составляющую ПИДрегулятора, то выбранное значение коэффициента усиления является
оптимальным. Если в дальнейшем дифференциальная составляющая
использоваться не будет, то рекомендуется еще уменьшать коэффициент
усиления, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика типа 3: в переходной характеристике
наблюдаются небольшой выброс (перерегулирование) и быстро затухающие
колебания (1-2 периода). Этот тип переходной характеристики обеспечивает
хорошее быстродействие и быстрый выход на задание. В большинстве случаев
его можно считать оптимальным, если в системе допускаются
перерегулирование при изменении задания. Перерегулирование устраняется
дополнительным
уменьшением Кр,
чтобы получилась
переходная
характеристика типа 4.
Переходная характеристика типа 4: регулируемая переменная плавно
подходит к установившемуся значению без перерегулирования и колебаний.
Этот тип переходной характеристики также можно считать оптимальным,
однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5: сильно затянутый выход к
установившемуся значению говорит о том, что коэффициент усиления
пропорциональной части чрезмерно мал. Динамическая и статическая точность
регулирования здесь мала.
26
Во всех рассмотренных выше случаях установившееся значение
регулируемой переменной в системе не совпадает со значением задания. Чем
меньше коэффициент усиления пропорциональной части, тем больше
статическая ошибка регулирования и больше длительность переходных
процессов. Таким образом, нужно стремиться выбирать коэффициент усиления
Кр как можно больше.
Настройка дифференциальной составляющей Тд
Для случая, когда на предыдущем этапе был задан коэффициент усиления
Кр и получена соответствующая переходная характеристика типа 2, в которой
присутствуют затухающие колебания (рис. 8, кривая 2, рис. 9, кривая 1).
Рисунок 9. Настройка Д-части ПИД-регулятора
Следует установить постоянную времени дифференцирования Тд, чтобы
переходная характеристика имела вид кривой 2 на рис. 9. В качестве первого
приближения постоянная времени дифференцирования делается равной
𝑇д = 0,2 × ∆𝑇 (где ∆𝑇 — период колебаний кривой переходного процесса).
Дифференциальная составляющая устраняет затухающие колебания и
делает переходную характеристику, похожую на тип 3 (рис. 8). При этом
коэффициент усиления 𝐾р больше, чем для типа 3. Это значит, что динамическая
и статическая точность регулирования при наличии дифференциальной
составляющей (ПД-регулятор) будет выше, чем для П-регулятора.
Настройка интегральной составляющей Ти
После настройки пропорциональной и дифференциальной составляющей
получается переходная характеристика, показанная на рис. 10, кривая 1.
27
Рисунок 10. Настройка И-части ПИД-регулятора
Интегральная составляющая предназначена для того, чтобы убрать
статическую ошибку регулирования между установившимся в системе
значением регулируемой переменной и заданием. Начинать настраивать
постоянную времени интегрирования следует с величины 𝑇и = ∆𝑇 (где ∆𝑇 —
период колебаний кривой переходного процесса).
Переходная характеристика 2 получается при чрезмерно большой
величине постоянной времени интегрирования. Выход на задание получается
очень затянутым.
Переходная характеристика 3: оптимальная.
Переходная характеристика 4: получается при слишком малой величине
постоянной
времени
интегрирования.
Если
постоянную
времени
интегрирования уменьшить еще, то в системе могут возникнуть колебания.
14. Сделайте выводы о влиянии параметров настройки ПИД-регулятора и
метода расчета на качество переходного процесса в САР.
15. Сохраните расчетную схему «Файл → Сохранить проект». Оформите
отчет о выполнении практического задания, указав:
цель работы;
индивидуальное задание;
настройки регулятора, рассчитанные различными методами;
расчетную схему одноконтурной САР с ПИД-регулятором;
графики всех переходных процессов в одноконтурной САР с ПИДрегулятором, рассчитанным различными методами, при регулировании по
заданию и по возмущению;
таблицу результатов расчетов показателей качества САР с ПИДрегулятором, рассчитанным различными методами, при регулировании по
заданию и по возмущению;
28
выводы.
29
Таблица 9. Результаты расчета САР с ПИД-регулятором различными методами
Метод
расчета
𝐾𝑝
𝐾𝑖 =
1
𝑇и
𝐾𝑑 = Тд
𝑡𝑝
Показатели качества
𝑌дин
𝜎
𝛹
внешнее возмущение
Метод
Копеловича
(𝑡𝑝 → 𝑚𝑖𝑛)
ZieglerNichols 1
ZieglerNichols 2
Метод CHR 1
(20%, Δg)
Метод CHR 2
(20%, Δf)
Метод Куна
(быстрая
настройка)
Метод Куна
(нормальная
настройка)
Метод
ручной
настройки
внешнее возмущение
Метод
Копеловича
ZieglerNichols 1
ZieglerNichols 2
Метод CHR 1
(20%, Δg)
Метод CHR 2
(20%, Δf)
Метод Куна
(быстрая
настройка)
Метод Куна
(нормальная
настройка)
Метод
ручной
настройки
30
Контрольные вопросы
1. Охарактеризуйте особенности работы ПИД-регулятора.
2. Приведите две формы записи уравнения для управляющего воздействия
ПИД-регулятора и поясните смысл параметров, входящих в эти уравнения.
3. Приведите две формы записи передаточной функции ПИД-регулятора и
поясните смысл параметров, входящих в передаточные функции.
4. Приведите возможные варианты структурной схемы ПИД-регулятора.
5. Приведите график управляющего воздействия во времени ПИДрегулятора.
6. Как влияет П-составляющая ПИД-регулятора на качество переходного
процесса в САР.
7. Как влияет И-составляющая ПИД-регулятора на качество переходного
процесса в САР.
8. Как влияет Д-составляющая ПИД-регулятора на качество переходного
процесса в САР.
9. Как перейти от ПИД-регулятора к П-регулятору.
10. Как перейти от ПИД-регулятора к И-регулятору.
11. Как перейти от ПИД-регулятора к Д-регулятору.
12. Запишите передаточную функцию ПИД-регулятора с независимыми
настройками.
13. Запишите передаточную функцию ПИД-регулятора с зависимыми
настройками.
14. Что такое аддитивная и мультипликативная формы записи.
15. Приведите последовательность расчета ПИД-регулятора методом
Копеловича.
16. Приведите последовательность расчета ПИД-регулятора методами
Ziegler-Nichols.
17. Приведите последовательность расчета ПИД-регулятора методом CHR.
18. Дайте сравнительную оценку рассмотренных методов расчета настроек
ПИД-регулятора. Укажите плюсы и минусы.
19. Дайте сравнительную оценку прямых показателей качества переходного
процесса при регулировании по заданию и по возмущению в САР с ПИДрегулятором, рассчитанным различными методами.
31
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 6
«СИНТЕЗ КАСКАДНОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ»
Цель работы — изучение работы и методов расчета каскадных САР.
Описание работы
Распространенным способом повышения качества регулирования в
одноконтурной системе является введение дополнительного контура
стабилизации промежуточной величины (рис. 11). Применение такой структуры
САР целесообразно, когда объект управления подвержен частым возмущающим
воздействиям со стороны регулирующего органа, и имеется параметр, который
с меньшей инерционностью, чем регулируемая величина, реагирует на эти
изменения. Таким образом, внутренний контур регулирования подавляет
внутренние возмущения, возникшие и обусловленные спецификой
технологического процесса, а внешний контур реагирует на воздействия,
поступающие извне. Поэтому рассматриваемый принцип регулирования
находит широкое применение при регулировании группы аппаратов. В этом
случае число контуров равно числу аппаратов.
Рисунок 11. Структурная схема каскадной САР
В общем случае определение оптимальных настроек регуляторов в
многоконтурных системах является сложной задачей и в случае большого числа
контуров может быть выполнено лишь на вычислительных машинах. Однако,
если инерционность внутреннего контура значительно меньше инерционности
внешнего в двухконтурной САР, возможно определение параметров настроек
основного и вспомогательного контуров независимо друг от друга. При этом
предполагается, что процесс во внутреннем контуре заканчивается прежде, чем
он может возникнуть во внешнем контуре.
Существует несколько методов расчета настроек основного и
вспомогательного регуляторов. Можно рассчитать вначале настройки
вспомогательного регулятора 𝑊рв (𝑠), затем определить передаточную функцию
32
эквивалентного объекта для основного регулятора 𝑊ро (𝑠) и, зная параметры
эквивалентного объекта, рассчитать его настройки.
Возможен другой способ определения оптимальных параметров настроек
регуляторов, когда вначале определяются параметры настройки основного, а
затем вспомогательного регуляторов.
Первый путь расчета двухконтурной САР наиболее целесообразно
применять при частых отключениях основного регулятора в системе аппаратов
для обеспечения стабильности технологического режима каждого из аппаратов
в отдельности. Второй путь является более правильным при расчете
двухконтурной САР отдельного процесса, когда возможно отключение
вспомогательного регулятора.
Порядок выполнения практического занятия
1. Запустите среду SimInTech.
2. Создайте новый проект «Файл → Новый проект → Схема модели
общего вида».
3. Настройте расчетные параметры схемы. Установите Начальный шаг
интегрирования startstep = 0, Конечное время расчета endtime = 300
(выбирается из соображения того, чтобы переходные процессы успевали
завершиться), Максимальный шаг hmax = 0.1. Остальные параметры оставьте по
умолчанию.
4. Перед продолжением работы сохраните схему в файл с новым именем в
своей рабочей папке. Для этого в Главном меню выбрать пункт «Файл →
Сохранить проект как...» и далее, используя стандартный диалог, сохранить
файл, указав соответствующий путь и имя файла — «Работа САУ 6.prt».
5. Объект управления представляет собой четыре последовательно
соединенных апериодических звена первого порядка. Значения коэффициентов
передаточных функций, входящих в объект, возьмите из описания
практического занятия № 4 в табл. 3 [1. С. 62]. При этом 𝑾о 𝟏 определяется как
произведение двух передаточных функций наименьшей инерционностью, а
𝑾о 𝟐 — как произведение двух остальных передаточных функций.
6. Снимите график переходной функции для звена 𝑊о1 (𝑠). Для этого
соберите расчетную схему (рис. 12), используя следующие блоки SimInTech:
генератор ступенчатого сигнала - 1 шт. (вкладка Источники →
Ступенька);
апериодическое звено - 2 шт. (вкладка Динамические → Инерционное
звено 1-го порядка);
33
график - 1 шт. (вкладка Вывод данных → Временной график).
Рисунок 12. Расчетная схема для снятия кривой разгона объекта 𝑊о 1 (𝑠)
Оформите поясняющие подписи к блокам.
В свойствах блока Ступенька задайте Время срабатывания t = [0],
Начальное состояние y0 = [0], Конечное состояние yk = [1].
В свойствах блока Инерционное звено 1-го порядка задайте
Коэффициенты усиления, Постоянные времени согласно своему варианту,
Начальные условия x0 = [0]. Повторите аналогичную процедуру для второго
Инерционного звена 1-го порядка.
Запустите схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9. В строке отображения расчетной информации
Схемного окна должна появиться надпись: «Конечное время достигнуто
(time = 8)», в противном случае в схеме была допущена ошибка.
7. Аппроксимируйте полученную кривую разгона апериодическим звеном
первого порядка с запаздыванием по методу Ормана (31) [1. С. 63]. Выберите в
качестве вспомогательного регулятор 𝑊рв (𝑠), реализующий П-закон.
Рассчитайте параметры его настройки по методу Копеловича на процесс с 20%м перерегулированием, используя номограммы, представленные в
Приложении А.
8. Снимите график переходной функции для эквивалентного объекта. Для
этого соберите расчетную схему (рис. 13), предварительно наполнив Схемное
окно SimInTech следующим блоками:
генератор ступенчатого сигнала - 1 шт. (вкладка Источники →
Ступенька);
апериодическое звено - 4 шт. (вкладка Динамические → Инерционное
звено 1-го порядка);
усилительное звено - 1 шт. (вкладка Операторы → Усилитель);
элемент сравнения - 1 шт. (вкладка Операторы → Сравнивающее
устройство);
график - 1 шт. (вкладка Вывод данных → Временной график).
34
Рисунок 13. Расчетная схема для снятия кривой разгона эквивалентного объекта
Оформите поясняющие подписи к блокам.
В свойствах блока Ступенька задайте Время срабатывания t = [0],
Начальное состояние y0 = [0], Конечное состояние yk = [1].
Введите настройки регулятора 𝑊рв (𝑠). В свойствах блока Усилитель
задайте Коэффициент усиления a = [расчетное значение].
В свойствах блока Инерционное звено 1-го порядка задайте
Коэффициенты усиления, Постоянные времени согласно своему варианту,
Начальные условия x0 = [0]. Повторите аналогичную процедуру для остальных
Инерционных звеньев 1-го порядка.
Запустите схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9. В строке отображения расчетной информации
Схемного окна должна появиться надпись: «Конечное время достигнуто
(time = 8)», в противном случае в схеме была допущена ошибка.
9. Аппроксимируйте полученную кривую разгона апериодическим звеном
первого порядка с запаздыванием по методу Ормана (31) [1. С. 63]. Выберите в
качестве основного регулятор Wро(s), реализующий ПИ-закон. Рассчитайте
параметры его настройки по методу Копеловича на процесс с 20%-м
перерегулированием, используя номограммы, представленные в Приложении А.
Для расчета коэффициента усиления при интегральной составляющей
воспользуйтесь формулой (25) [1. С. 59].
10. Для своего варианта объекта управления соберите расчетную схему
каскадной САР (рис. 14). Предварительно вынесите на Схемное окно
SimInTech следующие блоки:
генератор постоянного сигнала - 1 шт. (вкладка Источники →
Константа);
генератор ступенчатого сигнала - 1 шт. (вкладка Источники →
Ступенька);
апериодическое звено - 4 шт. (вкладка Динамические → Инерционное
звено 1-го порядка);
усилительное звено - 2 шт. (вкладка Операторы → Усилитель);
35
интегратор - 1 шт. (вкладка Динамические → Интегратор);
суммирующий элемент - 2 шт. (вкладка Операторы → Сумматор);
элемент сравнения - 2 шт. (вкладка Операторы → Сравнивающее
устройство);
график - 2 шт. (вкладка Вывод данных → Временной график).
Рисунок 14. Расчетная схема для исследования каскадной САР
Оформите поясняющие подписи к блокам.
В свойствах блока Константа задайте Значение a = [1], Тип данных
src_type = [double], Название txt = [k].
Введите настройки регулятора 𝑊ро (𝑠). В свойствах блока Усилитель
задайте Коэффициент усиления a = [расчетное значение]. В свойствах блока
Интегратор задайте Коэффициент усиления a = [расчетное значение],
Начальные условия x0 = [0].
Введите настройки регулятора 𝑊рв (𝑠) и выражения передаточных функций
эквивалентного объекта аналогично пункту 8.
В свойствах блока Ступенька задайте Время срабатывания t = [время,
когда завершится переходный процесс по заданию], Начальное состояние
y0 = [0], Конечное состояние yk = [1].
Снимите графики переходных процессов в каскадной САР по заданию и по
внешнему возмущению, запустив схему на расчет нажатием кнопки Пуск
на
Панели инструментов или клавиши F9. В строке отображения расчетной
информации Схемного окна должна появиться надпись: «Конечное время
достигнуто (time = 8)», в противном случае в схеме была допущена ошибка.
11. Обработайте полученный график переходного процесса в каскадной
САР,
рассчитайте
показатели
качества
𝑡перех ,
𝑥1 ,
36
𝜎, 𝛹 по формулам (26)-(30) [1. С. 60] при отработке внешнего возмущения на
объект и сравните их с показателями одноконтурной САР, рассчитанными по
методу Копеловича в практической работе № 3. Результаты занесите в табл. 10.
Сделайте вывод о качестве рассмотренных систем.
Таблица 10. Результаты расчета
Тип системы
𝑡перех
Показатели качества
𝑥1
𝜎
𝛹
Одноконтурная САР
Каскадная САР
12. Сохраните расчетную схему «Файл → Сохранить проект». Оформите
отчет о выполнении практического задания, указав:
цель работы;
индивидуальное задание;
выражение
передаточной
функции
эквивалентного
объекта,
рассматриваемого в работе;
кривые разгона объекта;
настройки вспомогательного и основного регулятора;
расчетную схему каскадной САР;
графики переходных процессов в каскадной САР;
графики управляющих воздействий в каскадной САР;
таблицу рассчитанных показателей качества;
выводы.
Контрольные вопросы
1. Сформулируйте условия применения каскадной САР.
2. Приведите несколько возможных вариантов схем каскадных систем
управления.
3. Поясните работу каскадной САР на конкретном примере.
4. Определите передаточные функции эквивалентных объектов для
расчета регуляторов заданного варианта каскадной системы управления.
5. Приведите порядок расчета параметров настроек регуляторов каскадной
САР на конкретном примере.
6. Поясните причины выбора той или иной последовательности расчета
каскадной системы управления.
37
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 7 «СИНТЕЗ ИНВАРИАНТНОЙ
СИСТЕМЫ РЕГУЛИРОВАНИЯ»
Цель работы — изучение методов расчета и работы компенсирующих
устройств при синтезе инвариантных САР.
Описание работы
Если одноконтурная САР не позволяет получить желаемого качества
регулирования, то возникает необходимость изменить структуру САР за счет ее
усложнения, например, путем введения дополнительных контуров
регулирования.
Если на систему действуют внешние возмущения и одно из них, самое
тяжелое, может быть измерено, то можно создать САР, объединяющие два
принципа регулирования: принцип регулирования по отклонению (замкнутый
контур передачи воздействий) и принцип регулирования по возмущению
(разомкнутый контур передачи воздействий) (рис. 15).
Рисунок 15. Структурная схема комбинированной САР
Для того чтобы система была инвариантна относительно возмущения f(t),
необходимо, чтобы передаточная функция по каналу возмущение-регулируемая
величина равнялась нулю (13):
𝑊𝑦−𝑓 (𝑠) =
𝑊ов (𝑠)+𝑊ку (𝑠)𝑊о (𝑠)
1+𝑊р (𝑠)𝑊о (𝑠)
= 0.
Выражение (13) равно нулю, если равен нулю числитель (14):
𝑊ов (𝑠) + 𝑊ку (𝑠)𝑊о (𝑠) = 0.
Из (14) получается условие инвариантности (15):
𝑊ку (𝑠) = −
𝑊ов (𝑠)
𝑊о (𝑠)
.
(13)
(14)
(15)
38
Если схема инвариантной САР имеет вид, представленный на рис. 16,
передаточная функция компенсирующего устройства определяется по
формуле (16):
𝑊ку (𝑠) = −
𝑊ов (𝑠)
𝑊р (𝑠)𝑊о (𝑠)
.
(16)
Рисунок 16. Структурная схема комбинированной САР (воздействие по возмущению
поступает на регулятор)
Расчет инвариантной системы заключается в выборе оптимальных
параметров настройки регулятора и компенсирующего устройства,
обеспечивающих необходимый запас устойчивости при наибольшей
достижимой точности. Так как это устройство компенсации возмущения не
входит в замкнутый контур передачи воздействия системы регулирования, то
устойчивость работы системы не зависит от его настройки и определяется лишь
параметрами регулятора. Поэтому расчет параметров настройки регуляторов
производится как для обычной одноконтурной САР.
В реальных условиях нередко невозможно достичь полной инвариантности.
Чаще всего это возникает из-за различной инерционности прохождения
сигналов. Поэтому ограничиваются частичной инвариантностью.
Если канал управления более инерционен, чем канал, по которому
возмущение попадает на выход объекта, то корректирующее устройство в случае
абсолютной инвариантности должно содержать идеально дифференцирующее
звено, что на непрерывных элементах физически не реализуемо.
В случае же, когда передаточные функции по основному каналу и каналу
прохождения возмущения содержат звенья чистого запаздывания, причем
𝜏о > 𝜏ов , то компенсирующее устройство также не может быть реализовано
физически.
39
Порядок выполнения практического занятия
1. Запустите среду SimInTech.
2. Создайте новый проект «Файл → Новый проект → Схема модели
общего вида».
3. Настройте расчетные параметры схемы. Установите Начальный шаг
интегрирования startstep = 0, Конечное время расчета endtime = 300
(выбирается из соображения того, чтобы переходные процессы успевали
завершиться), Максимальный шаг hmax = 0.1. Остальные параметры оставьте по
умолчанию.
4. Перед продолжением работы сохраните схему в файле с новым именем в
своей рабочей папке. Для этого в Главном меню нужно выбрать пункт «Файл
→ Сохранить проект как...» и далее, используя стандартный диалог, сохранить
файл, указав соответствующий путь и имя файла – «Работа САУ 7.prt».
5. Объект управления имеет два канала с передаточными функциями 𝑊ов и
𝑊о , которые определяются по соотношениям (17). Значения коэффициентов
передаточных функций, входящих в объект, приведены при описании
практического занятия № 4 в табл. 3 [1. С. 62]:
𝑊о = 𝑊1 ∙ 𝑊2 ∙ 𝑊3 ,
(17)
𝑊ов = 𝑊1 ∙ 𝑊2 ∙ 𝑊3 ∙ 𝑊4 .
6. Снимите кривую разгона объекта по каналу управления 𝑊о . Для этого
соберите расчетную схему (рис. 17), используя следующие блоки SimInTech:
генератор ступенчатого сигнала - 1 шт. (вкладка Источники →
Ступенька);
апериодическое звено - 3 шт. (вкладка Динамические → Инерционное
звено 1-го порядка);
график - 1 шт. (вкладка Вывод данных → Временной график).
Рисунок 17. Расчетная схема для снятия кривой разгона объекта
Оформите поясняющие подписи к блокам.
В свойствах блока Ступенька задайте Время срабатывания t = [0],
Начальное состояние y0 = [0], Конечное состояние yk = [1].
40
В свойствах блока Инерционное звено 1-го порядка задайте
Коэффициенты
усиления,
Постоянные
времени
согласно
своему
варианту (табл. 3) [1. С. 62], Начальные условия x0 = [0]. Повторите
аналогичную процедуру для второго и третьего Инерционного звена 1-го
порядка.
Запустите схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9. В строке отображения расчетной информации
Схемного окна должна появиться надпись: «Конечное время достигнуто
(time = 8)», в противном случае в схеме была допущена ошибка.
7. Аппроксимируйте полученную кривую разгона апериодическим звеном
первого порядка с запаздыванием по методу Ормана (31) [1. С. 61] и рассчитайте
параметры настройки ПИ-регулятора 𝑊р (𝑠) по методу Копеловича на процесс с
20%-м перерегулированием, используя номограммы, представленные в
Приложении. Для расчета коэффициента усиления при интегральной
составляющей воспользуйтесь формулой (25) [1. С. 59].
8. Соберите
расчетную
схему
одноконтурной
САР
с
ПИрегулятором (рис. 18). Предварительно вынесите на Схемное окно SimInTech
следующие блоки:
генератор постоянного сигнала - 1 шт. (вкладка Источники →
Константа);
генератор ступенчатого сигнала - 1 шт. (вкладка Источники →
Ступенька);
апериодическое звено - 7 шт. (вкладка Динамические → Инерционное
звено 1-го порядка);
усилительное звено - 1 шт. (вкладка Операторы → Усилитель);
интегрирующее звено - 1 шт. (вкладка Динамические → Интегратор);
суммирующий элемент - 2 шт. (вкладка Операторы → Сумматор);
сравнивающее - 1 шт. (вкладка Операторы → Сравнивающее
устройство);
график - 1 шт. (вкладка Вывод данных → Временной график).
Оформите поясняющие подписи к блокам.
В свойствах блока Константа задайте Значение a = [1], Тип данных
src_type = [double], Название txt = [k].
Введите настройки регулятора 𝑊р (𝑠). В свойствах блока Усилитель задайте
Коэффициент усиления a = [расчетное значение]. В свойствах блока
41
Интегратор задайте Коэффициент
Начальные условия x0 = [0].
усиления
a = [расчетное
значение],
Рисунок 18. Расчетная схема для исследования работы одноконтурной САР
В свойствах блока Инерционное звено 1-го порядка задайте
Коэффициенты
усиления,
Постоянные
времени
согласно
своему
варианту (табл. 3) [1. С. 62], Начальные условия x0 = [0]. Повторите
аналогичную процедуру для остальных Инерционных звеньев 1-го порядка.
В свойствах блока Ступенька задайте Время срабатывания t = [время,
когда завершится переходный процесс по заданию], Начальное состояние
y0 = [0], Конечное состояние yk = [1].
Получите график переходного процесса, запустив схему на расчет нажатием
кнопки Пуск
на Панели инструментов или клавиши F9. В строке
отображения расчетной информации Схемного окна должна появиться надпись:
«Конечное время достигнуто (time = 8)», в противном случае в схеме была
допущена ошибка.
9. Определите прямые показатели качества регулирования по
формулам (26)-(30) [1. С. 60] в одноконтурной САР при отработке внешнего
возмущения на объект. Результаты занесите в табл. 11.
Таблица 11. Результаты расчета
Тип системы
𝑡перех
Показатели качества
𝑥1
𝜎
𝛹
Одноконтурная САР
Инвариантная САР
42
10. Рассчитайте передаточную функцию компенсирующего устройства,
используя условие инвариантности (15).
11. Для своего варианта объекта управления соберите расчетную схему
комбинированной САР (рис. 19). Предварительно вынесите на Схемное окно
SimInTech следующие блоки:
генератор постоянного сигнала - 1 шт. (вкладка Источники →
Константа);
генератор ступенчатого сигнала - 1 шт. (вкладка Источники →
Ступенька);
апериодическое звено - 8 шт. (вкладка Динамические → Инерционное
звено 1-го порядка);
усилительное звено - 1 шт. (вкладка Операторы → Усилитель);
интегрирующее звено - 1 шт. (вкладка Динамические → Интегратор);
суммирующий элемент - 2 шт. (вкладка Операторы → Сумматор);
элемент сравнения - 1 шт. (вкладка Операторы → Сравнивающее
устройство);
график - 1 шт. (вкладка Вывод данных → Временной график).
Рисунок 19. Расчетная схема для исследования работы комбинированной САР
Оформите поясняющие подписи к блокам.
Аналогично пункту 8 задайте настройки всех блоков, входящих в расчетную
схему. Дополнительно задайте настроечные параметры корректирующего
43
устройства 𝑊ку (𝑠), рассчитанные в пункте 10. Чтобы добавить еще один вход в
блоке Сумматор, в свойствах блока задайте Весовые коэффициенты для
каждого из входов a = [1, 1, 1].
Запустите схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9. Получите график переходного процесса в
комбинированной САР.
12. Определите показатели качества переходного процесса в инвариантной
САР при отработке внешнего возмущения по формулам (26)-(30) [1. С. 60].
Результаты занесите в табл. 11. Сравните качество регулирования в
одноконтурной и инвариантной САР и сделайте выводы.
13. Сохраните расчетную схему «Файл → Сохранить проект». Оформите
отчет о выполнении практического задания, указав:
цель работы;
индивидуальное задание;
кривую разгона объекта по каналу управления;
настройки регулятора;
расчетную схему одноконтурной САР;
графики переходных процессов в одноконтурной САР;
передаточную функцию корректирующего устройства;
расчетную схему инвариантной САР;
графики переходных процессов в инвариантной САР;
таблицу рассчитанных показателей качества;
выводы.
Контрольные вопросы
1. Сформулируйте необходимость применения комбинированных САР.
2. Выведите условие инвариантности для выбора компенсирующего
устройства.
3. Сформулируйте условие полной инвариантности.
4. Сформулируйте условие частичной инвариантности.
5. Приведите условия физической реализации компенсирующего
устройства в случае полной инвариантности.
6. Покажите, что полная инвариантность недостижима без управления по
возмущению.
7. Как рассчитывается передаточная функция корректирующего
устройства в случае частичной инвариантности?
44
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 8 «ИССЛЕДОВАНИЕ
ХАРАКТЕРИСТИК ТИПОВЫХ НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ»
Цель работы — построить статические характеристики нелинейных
элементов (НЭ), исследовать процесс прохождения гармонического сигнала
через них при различных значениях параметров нелинейностей.
Описание работы
Изучаемые в САУ линейные системы фактически получаются в результате
линеаризации реальных систем (в окрестности рабочей точки процесса), в
которых всегда в определенной форме встречаются те или иные нелинейные
зависимости. Иногда в одном или нескольких звеньях не удается провести
линеаризацию из-за наличия в них существенных нелинейностей, или
существенные нелинейности могут вводиться в систему специально для
получения желаемых свойств.
Нелинейной системой называется система, в состав которой входит хотя бы
одно
нелинейное
звено,
т.е.
звено,
описываемое
нелинейным
дифференциальным или алгебраическим уравнением. Изучению статических
характеристик типовых нелинейных звеньев посвящена данная работа.
Порядок выполнения практического занятия
1. Запустите среду SimInTech.
2. Создайте новый проект «Файл → Новый проект → Схема модели
общего вида».
3. Настройте расчетные параметры схемы. Установите Начальный шаг
интегрирования startstep = 0, Конечное время расчета endtime = 10
(выбирается из соображения того, чтобы переходные процессы успевали
завершиться), Максимальный шаг hmax = 0.01.
4. Исследование нелинейности типа «зона нечувствительности».
Перенесите на схемное окно SimInTech блоки:
генератор синусоидального сигнала - 1 шт. (вкладка Источники →
Синусоида);
зона нечувствительности - 1 шт. (вкладка Нелинейные → Линейное с
зоной нечувствительности);
усилительное звено - 1 шт. (вкладка Операторы → Усилитель);
график - 1 шт. (вкладка Вывод данных → Временной график);
фазовый портрет - 1 шт. (вкладка Вывод данных → Фазовый портрет).
Соберите расчетную схему согласно рис. 20.
45
Рисунок 20. Схема № 1
Зона нечувствительности преобразует входной сигнал по алгоритму:
𝑦(𝑡) = 0, если 𝑎 ≤ 𝑥(𝑡) ≤ 𝑏,
𝑦(𝑡) = 𝑘 · (𝑥(𝑡)– 𝑎), если 𝑥 < 𝑎,
𝑦(𝑡) = 𝑘 · (𝑥(𝑡) − 𝑏), если 𝑥(𝑡) > 𝑏,
где 𝑥(𝑡) — входной сигнал;
𝑦(𝑡) — выходной сигнал;
𝑘 — коэффициент усиления;
𝑎, 𝑏 — левая и правая границы зоны нечувствительности соответственно.
То есть блок Линейное с зоной нечувствительности выполняет
нелинейное преобразование входного сигнала, уменьшая его абсолютную
величину на постоянное значение. Так, если абсолютная величина входного
сигнала меньше или равна вычитаемой константе, то значение выходного
сигнала будет равно нулю. Коэффициент усиления определяет угол наклона
характеристики звена.
В свойствах блока Синусоида установите Амплитуду a = 1, Частоту w = 1,
Фазу f = 0. В свойствах блока Линейное с зоной нечувствительности
установите Нижнюю границу аргумента a = -0.3, Верхнюю границу аргумента
b = 0.3, Коэффициент усиления k = 0.5.
Промоделируйте расчетную схему (кнопка
или клавиша F9).
Проанализируйте результаты моделирования и вставьте полученные
графики в протокол работы, оформленный в MS Word.
Повторите процесс моделирования при различных параметрах настройки
нелинейного элемента (увеличьте или уменьшите ширину зоны
нечувствительности, измените коэффициент усиления характеристики),
46
проанализируйте результат. Получившиеся графики также включите в отчет
работы.
5. Исследование нелинейности типа «линейное с насыщением».
Перенесите на схемное окно SimInTech блоки:
генератор синусоидального сигнала - 1 шт. (вкладка Источники →
Синусоида);
насыщение - 1 шт. (вкладка Нелинейные → Линейное с насыщением);
график - 1 шт. (вкладка Вывод данных → Временной график);
фазовый портрет - 1 шт. (вкладка Вывод данных → Фазовый портрет).
Соберите расчетную схему согласно рис. 21.
Рисунок 21. Схема № 2
Насыщение (ограничитель) преобразует входной сигнал по алгоритму:
𝑦(𝑡) = 𝑘 · 𝑥(𝑡), если 𝑎 < 𝑥 < 𝑏,
𝑦(𝑡) = 𝑦1 , если 𝑥(𝑡) ≤ 𝑎,
𝑦(𝑡) = 𝑦2 , если 𝑥(𝑡) ≥ 𝑏.
где 𝑥(𝑡) — входной сигнал;
𝑦(𝑡) — выходной сигнал;
𝑦 −𝑦1
𝑘= 2
𝑏−𝑎
;
𝑎, 𝑏 — нижняя и верхняя границы ограничения соответственно;
𝑦1 , 𝑦2 — нижнее и верхнее значения функции соответственно.
То есть блок Линейное с насыщением ограничивает сигнал на выходе
согласно заданным границам — верхней 𝑏 и нижней 𝑎. Так, если входной сигнал
𝑥(𝑡) находится в заданных границах, то блок передает его на выход без
47
преобразований (коэффициент, определяющий наклон равен 𝑘). Если же
входной сигнал 𝑥(𝑡) выходит за границы, то сигналу на выходе будет
присваиваться значение соответствующего предела 𝑦1 или 𝑦2 .
В свойствах блока Синусоида установите Амплитуду a = 1, Частоту w = 1,
Фазу f = 0. В свойствах блока Линейное с насыщением установите Нижнюю
границу аргумента a = -0.5, Верхнюю границу аргумента b = 0.5, Нижнее
значение функции Y1 = -0.5, Верхнее значение функции Y2 = 0.5.
Промоделируйте расчетную схему (кнопка
или клавиша F9).
Проанализируйте результаты моделирования и вставьте полученные
графики в протокол работы, оформленный в MS Word.
Повторите процесс моделирования при различных параметрах настройки
нелинейного элемента (измените верхний и нижний пределы ограничения,
верхнюю и нижнюю границы ограничения), проанализируйте результат.
Получившиеся графики также включите в отчет работы.
6. Исследование нелинейности типа «линейное насыщение с зоной
нечувствительности».
Перенесите на схемное окно SimInTech блоки:
генератор синусоидального сигнала - 1 шт. (вкладка Источники →
Синусоида);
насыщение с зоной нечувствительности - 1 шт. (вкладка Нелинейные
→ Линейное с насыщением и зоной нечувствительности);
график - 1 шт. (вкладка Вывод данных → Временной график);
фазовый портрет - 1 шт. (вкладка Вывод данных → Фазовый портрет).
Соберите расчетную схему согласно рис. 22.
Рисунок 22. Схема № 3
48
Насыщение (ограничитель) с зоной нечувствительности преобразует
входной сигнал по алгоритму:
𝑦(𝑡) = 𝑘1 · (𝑥(𝑡) − 𝑎), если 𝑎1 < 𝑥(𝑡) < 𝑎,
𝑦(𝑡) = 𝑘2 · (𝑥(𝑡) − 𝑏), если 𝑏1 < 𝑥(𝑡) < 𝑏,
𝑦(𝑡) = 0, если 𝑎 ≤ 𝑥(𝑡) ≤ 𝑏,
𝑦(𝑡) = 𝑦1 , если 𝑥(𝑡) ≤ 𝑎1 ,
𝑦(𝑡) = 𝑦2 , если 𝑥(𝑡) ≥ 𝑏1 ,
где 𝑥(𝑡) — входной сигнал;
𝑦(𝑡) — выходной сигнал;
𝑘1 =
𝑘2 =
𝑦1
𝑎1 −𝑎
𝑦2
𝑏1 −𝑏
;
;
𝑎, 𝑏 — левая и правая границы зоны нечувствительности соответственно;
𝑎1 , 𝑏1 — нижняя и верхняя границы ограничения соответственно;
𝑦1 , 𝑦2 — нижнее и верхнее значения функции соответственно.
Этот элемент является комбинацией двух предыдущих нелинейностей.
В свойствах блока Синусоида установите Амплитуду a = 1, Частоту w = 1,
Фазу f = 0. В свойствах блока Линейное с насыщением и зоной
нечувствительности установите Нижнюю границу зоны нечувствительности
a = -0.1, Верхнюю границу зоны нечувствительности b = 0.1, Нижнюю границу
ограничения a1 = -0.6, Верхнюю границу ограничения b1 = 0.6, Нижнее значение
функции Y1 = -0.6, Верхнее значение функции Y2 = 0.6.
Промоделируйте расчетную схему (кнопка
или клавиша F9).
Проанализируйте результаты моделирования и вставьте полученные
графики в протокол работы, оформленный в MS Word.
Повторите процесс моделирования при различных параметрах настройки
нелинейного элемента (увеличьте или уменьшите ширину зоны
нечувствительности, измените угол наклона характеристики, измените верхний
и нижний пределы ограничения), проанализируйте результат. Получившиеся
графики также включите в отчет.
7. Исследование нелинейности типа «квантователь».
Перенесите на схемное окно SimInTech блоки:
генератор синусоидального сигнала - 1 шт. (вкладка Источники →
Синусоида);
квантователь - 1 шт. (вкладка Нелинейные → Квантователь по
уровню);
49
график - 1 шт. (вкладка Вывод данных → Временной график);
фазовый портрет - 1 шт. (вкладка Вывод данных → Фазовый портрет).
Соберите расчетную схему согласно рис. 23.
Рисунок 23. Схема № 4
Квантователь преобразует входной сигнал по алгоритму:
𝑥(𝑡)
𝑦(𝑡) = 𝑑 · sign(𝑥(𝑡)) · floor (|(
𝑑
) + 0.5|),
где 𝑥(𝑡) — входной сигнал;
𝑑 — шаг квантования по уровню,
floor — функция округления до меньшего целого числа,
sign — функция знака,
𝑦(𝑡) — выходной сигнал.
То есть блок Квантователь квантует сигнал по уровню с заданным шагом
𝑑. Знак величины шага квантования смещает характеристику квантователя на
величину шага.
В свойствах блока Синусоида установите Амплитуду a = 1, Частоту w = 1,
Фазу f = 0. В свойствах блока Квантователь установите Шаг квантования
step = 0.3.
Промоделируйте расчетную схему (кнопка
или клавиша F9).
Проанализируйте результаты моделирования и вставьте полученные
графики в протокол работы, оформленный в MS Word.
Повторите процесс моделирования при различных значениях шага
квантования, проанализируйте результат. Получившиеся графики также
включите в отчет работы.
8. Исследование нелинейности типа «гистерезис».
Перенесите на схемное окно SimInTech блоки:
генератор синусоидального сигнала - 1 шт. (вкладка Источники →
Синусоида);
50
реле - 1 шт. (вкладка Нелинейные → Релейное неоднозначное
(гистерезис));
график - 1 шт. (вкладка Вывод данных → Временной график);
фазовый портрет - 1 шт. (вкладка Вывод данных → Фазовый портрет).
Соберите расчетную схему согласно рис. 24.
Рисунок 24. Схема № 5
Гистерезис преобразует входной сигнал по алгоритму:
𝑦(𝑡) = 𝑦1 , если 𝑥(𝑡) < 𝑎,
𝑦(𝑡) = 𝑦(𝑡 − 𝛥𝑡), если 𝑎 ≤ 𝑥(𝑡) ≤ 𝑏,
𝑦(𝑡) = 𝑦2 , если 𝑥(𝑡) > 𝑏,
где 𝑥(𝑡) — входной сигнал;
𝑦(𝑡) — выходной сигнал;
𝛥𝑡 — предыдущий шаг интегрирования;
𝑎, 𝑏 — нижняя и верхняя границы переключения (ширина петли);
𝑦1 , 𝑦2 — нижнее и верхнее значения функции.
То есть блок Гистерезис выполняет нелинейное преобразование входного
сигнала, отслеживает величину входного сигнала и устанавливает выход в одно
из двух фиксированных состояний с определенным «отставанием». Если
входной сигнал попадает в зону неоднозначности, определяемую шириной
«петли» гистерезиса, то переключения не происходит и выходной сигнал
остается на прежнем уровне.
В свойствах блока Синусоида установите Амплитуду a = 1, Частоту w = 1,
Фазу f = 0. В свойствах блока Гистерезис установите Нижнюю границу
переключения a = -0.5, Верхнюю границу переключения b = 0.5, Нижнее значение
51
функции Y1 = -1, Верхнее значение функции Y2 = 1, Начальные условия (1;0)
y0 = 1. Остальные параметры оставьте по умолчанию.
Промоделируйте расчетную схему (кнопка
или клавиша F9).
Проанализируйте результаты моделирования и вставьте полученные
графики в протокол работы, оформленный в MS Word.
Повторите процесс моделирования при различных параметрах настройки
нелинейного элемента (измените верхнее и нижнее значения функции, нижнюю
и верхнюю границы переключения), проанализируйте результат. Получившиеся
графики также включите в отчет работы.
Если в блоке Гистерезис приравнять нижнюю и верхнюю границы
переключения нулю, то получим нелинейность типа «идеальное
двухпозиционное реле». Повторите процесс моделирования, выставив
Нижнюю границу переключения a = 0, Верхнюю границу переключения b = 0,
Нижнее значение функции Y1 = -0.3, Верхнее значение функции Y2 = 0.3.
Проанализируйте результат. Получившийся график также включите в отчет.
9. Исследование
нелинейности
типа
«релейное
с
зоной
нечувствительности».
Перенесите на схемное окно SimInTech блоки:
генератор синусоидального сигнала - 1 шт. (вкладка Источники →
Синусоида);
реле
- 1 шт. (вкладка Нелинейные → Релейное с зоной
нечувствительности);
график - 1 шт. (вкладка Вывод данных → Временной график);
фазовый портрет - 1 шт. (вкладка Вывод данных → Фазовый портрет).
Соберите расчетную схему согласно рис. 25.
52
Рисунок 25. Схема № 6
Данное реле преобразует входной сигнал по алгоритму:
𝑦(𝑡) = 𝑦1 , если 𝑥(𝑡) < 𝑎,
𝑦(𝑡) = 0, если 𝑎 < 𝑥(𝑡) < 𝑏,
𝑦(𝑡) = 𝑦(𝑡 − 𝛥𝑡), если 𝑎1 ≤ 𝑥(𝑡) ≤ 𝑎, или 𝑏 ≤ 𝑥(𝑡) ≤ 𝑏1 ,
𝑦(𝑡) = 𝑦2 , если 𝑥(𝑡) > 𝑏1 ,
Где 𝑥(𝑡) — входной сигнал;
𝑦(𝑡) — выходной сигнал;
𝛥𝑡 — предыдущий шаг интегрирования;
𝑎, 𝑏 — нижняя и верхняя границы зоны нечувствительности;
𝑎1 , 𝑏1 — нижняя и верхняя границы переключения (ширина петли);
𝑦1 , 𝑦2 — нижнее и верхнее значения функции.
То есть блок Релейное с зоной нечувствительности совмещает в себе
нелинейности типа гистерезис и зона нечувствительности, отслеживает
величину входного сигнала и, в зависимости от заданного значения «зоны
нечувствительности», устанавливает выход в одно из трех фиксированных
состояний. Так, если 𝑎 = 𝑏 = 𝑎1 = 𝑏1 = 0, то получаем нелинейность
«идеальное двухпозиционное реле». Если же 𝑎 ≠ 0, 𝑏 ≠ 0, 𝑎1 = 𝑎, 𝑏1 = 𝑏, то
получаем нелинейность «идеальное трехпозиционное реле».
В свойствах блока Синусоида установите Амплитуду a = 1, Частоту w = 1,
Фазу f = 0. В свойствах блока Релейное с зоной нечувствительности
установите Нижнюю границу зоны нечувствительности a = -0.5, Нижнюю
границу переключения a = -0.5, Верхнюю границу зоны нечувствительности
b1 = 0.5, Верхнюю границу переключения b = 0.5, Нижнее значение функции
Y1 = -0.6, Верхнее значение функции Y2 = 0.6. Остальные параметры оставьте по
умолчанию.
Промоделируйте расчетную схему (кнопка
или клавиша F9).
Проанализируйте результаты моделирования и вставьте полученные
графики в протокол работы, оформленный в MS Word.
Повторите процесс моделирования при различных параметрах настройки
нелинейного элемента (измените ширину «зоны нечувствительности», задайте
границы переключения (введите гистерезис), измените амплитуду срабатывания
реле, получите идеализированный случай двухпозиционного реле),
проанализируйте результат. Получившиеся графики также включите в отчет
53
10. Исследование нелинейности типа «зазор».
Перенесите на схемное окно SimInTech блоки:
генератор синусоидального сигнала - 1 шт. (вкладка Источники →
Синусоида);
зазор - 1 шт. (вкладка Нелинейные → Зазор);
график - 1 шт. (вкладка Вывод данных → Временной график);
фазовый портрет - 1 шт. (вкладка Вывод данных → Фазовый портрет).
Соберите расчетную схему согласно рис. 26.
Рисунок 26. Схема № 7
Зазор преобразует входной сигнал по алгоритму:
𝑦(𝑡) = 𝑘 · (𝑥(𝑡)– 𝑏), если 𝑥(𝑡) >
𝑦(𝑡−𝛥𝑡)
𝑦(𝑡) = 𝑘 · (𝑥(𝑡) − 𝑏), если 𝑥(𝑡) <
𝑦(𝑡) = 𝑦(𝑡 − 𝛥𝑡), если
𝑦(𝑡−𝛥𝑡)
𝑘
+ 𝑏,
𝑘
𝑦(𝑡−𝛥𝑡)
𝑘
− 𝑏 ≤ 𝑥(𝑡) ≤
− 𝑏,
𝑦(𝑡−𝛥𝑡)
𝑘
+ 𝑏,
где 𝑥(𝑡) — входной сигнал;
𝑦(𝑡) — выходной сигнал;
𝛥𝑡 — предыдущий шаг интегрирования,
𝑏 — половина ширины зоны зазора;
𝑘 — коэффициент усиления.
Блок Зазор характеризуется величиной перемещения одного из
сопряженных элементов соединения, не вызывающего перемещения другого,
ведомого элемента (имеет место почти во всех механических соединениях).
В свойствах блока Синусоида установите Амплитуду a = 1, Частоту w = 1,
Фазу f = 0. В свойствах блока Зазор установите Половину ширины зоны зазора
54
b = 0.2, Коэффициент усиления k = 1. Остальные параметры оставьте по
умолчанию.
Промоделируйте расчетную схему (кнопка
или клавиша F9).
Проанализируйте результаты моделирования и вставьте полученные
графики в протокол работы, оформленный в MS Word.
Повторите процесс моделирования при различных значениях ширины зоны
зазора и коэффициента усиления, проанализируйте результат. Получившиеся
графики также включите в отчет работы.
11. Сохраните расчетную схему с выполненной лабораторной работой. Для
этого в Главном меню Главного окна SimInTech нужно выбрать пункт «Файл
→ Сохранить проект как...» и далее, используя стандартный диалог, сохранить
файл, указав соответствующий путь и имя файла — «Работа САУ8_1.prt».
12. Оформите отчет о выполнении практического задания, указав:
цель работы;
распечатанные графики с переходными характеристиками типовых
нелинейных элементов и их статическими характеристиками;
выводы о том, как влияют основные параметры звеньев на их
характеристики.
Контрольные вопросы
1. Какие звенья относятся к нелинейным.
2. Что такое статическая характеристика нелинейного элемента?
3. Приведите примеры однозначных статических характеристик.
4. Приведите примеры неоднозначных статических характеристик.
5. Приведите примеры симметричных статических характеристик.
6. Приведите примеры несимметричных статических характеристик.
7. Дайте характеристику нелинейностт типа «зона нечувствительности».
8. Дайте характеристику нелинейности типа «ограничение (насыщение)».
9. Дайте характеристику нелинейности типа «гистерезис».
10. Назовите типы релейных характеристик.
11. Дайте характеристику нелинейности типа «идеальное реле».
12. Дайте характеристику нелинейности типа «реле с гистерезисом».
13. Дайте характеристику нелинейности типа «реле с зоной
нечувствительности».
14. Дайте характеристику нелинейности типа «реле с зоной
нечувствительности и гистерезисом».
15. Дайте характеристику нелинейности типа «зазор».
55
16. Дайте определение нелинейной системы.
17. В чем заключаются отличительные особенности нелинейных систем.
18. Нарисуйте упрощенную структурную схему замкнутой нелинейной
САР.
19. Что такое линеаризация?
20. Перечислите методы линеаризации нелинейных систем.
56
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 9
«ИЗУЧЕНИЕ ВЛИЯНИЯ НЕЛИНЕЙНОСТИ ОБЪЕКТА НА
РАСЧЕТ И КАЧЕСТВО САР»
Цель работы — ознакомиться с особенностями, которые необходимо
учитывать при расчете САР нелинейным объектом.
Описание работы
В ходе технологического процесса нагрузка на объект управления может
периодически изменяться, что приводит к смещению и рабочей точки процесса.
Если характеристика объекта нелинейна, то настройки регулятора, рассчитанные
в окрестности определенной рабочей точки, могут стать неадекватными, и
качество работы САР может ухудшиться, или вообще САР может потерять
устойчивость.
В данной работе рассматриваются особенности управления объектом,
который описывается нелинейной математической моделью. Нелинейность
обусловлена тем, что в диапазоне изменений параметров нагрузки изменяется
значение коэффициента усиления передаточной функции объекта (рис. 27).
Рисунок 27. Нелинейная статическая характеристика коэффициента усиления
объекта
Порядок выполнения практического занятия
1. Запустите среду SimInTech.
2. Создайте новый проект «Файл → Новый проект → Схема модели
общего вида».
3. Настройте расчетные параметры схемы. Установите Начальный шаг
интегрирования startstep = 0, Конечное время расчета endtime = 200
57
(выбирается из соображения того, чтобы переходные процессы успевали
завершиться, Максимальный шаг hmax = 0.01).
4. Создайте субмодель идеализированной линейной модели объекта
(апериодическое звено 1-го порядка с запаздыванием) (рис. 28, а). Перенесите на
Схемное окно следующий блок: макроблок -1 шт. (вкладка Субструктуры →
Субмодель).
а)
б)
Рисунок 28. Субмодель линейной модели объекта
Перейдите во вложение блока Субмодель, наведя на него курсор мыши и
сделав двойной щелчок левой кнопкой. Наполните структуру следующими
блоками (рис. 28, б):
Вход - 1 шт. (вкладка Субструктуры → Порт входа);
Выход - 1 шт. (вкладка Структуры → Порт выхода);
передаточная функция
- 1 шт. (вкладка Динамические →
Передаточная функция общего вида);
звено запаздывания - 1 шт. (вкладка Динамические → Идеальное
транспортное запаздывание).
Выход блока Порт входа подключите к входу исследуемого объекта, выход
объекта подключите к входу блока Порт выхода и задайте соответствующие
имена портов субмодели.
В свойствах блока Передаточная функция общего вида задайте
Коэффициенты числителя и знаменателя согласно своему варианту (табл. 12)
(запись векторов необходимо начинать с нулевого элемента в порядке
возрастания степени при 𝑠), Начальные условия оставьте без изменения y0 = [0].
В свойства блока Идеальное транспортное запаздывание задайте Время
запаздывания 𝜏оу (согласно варианту), остальные параметры оставьте по
умолчанию.
Выйдите из субмодели в пространство основной структурной схемы. Для
этого необходимо либо нажать кнопку Возврат из Субмодели на Панели
58
инструментов Схемного окна
, либо выполнить двойной щелчок левой
кнопкой мыши на свободном месте пространства субмодели.
Таблица 12. Варианты исследуемых объектов
1
𝑘0 = 2,5
𝑇оу = 5
𝜏оу = 2
5
𝑘0 = 2,1
𝑇оу = 6,2
𝜏оу = 1,4
9
𝑘0 = 0,5
𝑇оу = 10
𝜏оу = 4
Варианты
𝑘0
𝑊(𝑠) =
𝑒 −𝜏оу𝑠
𝑇оу 𝑠 + 1
2
3
𝑘0 = 2,2
𝑘0 = 2,7
𝑇оу = 4,5
𝑇оу = 6
𝜏оу = 1,5
𝜏оу = 2,5
6
7
𝑘0 = 1,5
𝑘0 = 1,0
𝑇оу = 6
𝑇оу = 2,5
𝜏оу = 3
𝜏оу = 0,8
10
11
𝑘0 = 0,9
𝑘0 = 1,5
𝑇оу = 4
𝑇оу = 5
𝜏оу = 2
𝜏оу = 2
4
𝑘0 = 3
𝑇оу = 3,5
𝜏оу = 1,8
8
𝑘0 = 2,8
𝑇оу = 7
𝜏оу = 2,5
12
𝑘0 = 2,5
𝑇оу = 15
𝜏оу = 6
5. Создайте субмодель реальной нелинейной модели объекта с переменным
коэффициентом усиления (рис. 29):
𝑘(𝑓) = (0.01 ∙ 𝑓(𝑡)4 ) + 𝑘0 ,
(18)
где 𝑘0 — начальное значение коэффициента усиления согласно варианту
(табл. 12);
𝑓(𝑡) — величина нагрузки.
Понадобится блок макроблок - 1 шт. (вкладка Субструктуры →
Субмодель).
Рисунок 29. Блок нелинейной модели объекта
Перейдите во вложение блока Субмодель, наведя на него курсор мыши и
сделав двойной щелчок левой кнопкой. Наполните структуру следующими
59
блоками (рис. 30), задайте соответствующие имена портов субмодели и
поясняющие подписи блоков:
вход - 2 шт. (вкладка Субструктуры → Порт входа);
выход - 1 шт. (вкладка Структуры → Порт выхода);
суммирующий элемент - 1 шт. (вкладка Операторы → Сумматор);
сравнивающее устройство
- 1 шт. (вкладка Операторы →
Сравнивающее устройство);
усилительное звено - 1 шт. (вкладка Операторы → Усилитель);
степенная функция - 1 шт. (вкладка Функции → Степенная функция);
константа - 2 шт. (вкладка Источники → Константа);
перемножитель - 1 шт. (вкладка Операторы → Перемножитель);
делитель - 1 шт. (вкладка Операторы → Делитель);
интегратор - 1 шт. (вкладка Динамические → Интегратор);
звено запаздывания - 1 шт. (вкладка Динамические → Идеальное
транспортное запаздывание);
график - 1 шт. (вкладка Вывод данных → Временной график).
Выйдите из субмодели в пространство основной структурной схемы.
Рисунок 30. Субмодель нелинейной модели объекта
60
6. Создайте субблок (рис. 31), имитирующий ступенчатое изменение
нагрузки на объект в процессе моделирования. Понадобится блок макроблок 1 шт. (вкладка Субструктуры → Субмодель).
Рисунок 31. Субблок ступенчатого изменения нагрузки
Перейдите во вложение блока Субмодель, наведя на него курсор мыши и
сделав двойной щелчок левой кнопкой. Наполните структуру следующими
блоками (рис. 32), задайте соответствующие имена портов субмодели и
поясняющие подписи блоков:
вход - 1 шт. (вкладка Субструктуры → Порт входа);
выход - 1 шт. (вкладка Структуры → Порт выхода);
генератор ступенчатого сигнала - 4 шт. (вкладка Источники →
Ступенька);
суммирующий элемент - 1 шт. (вкладка Операторы → Сумматор);
переменная - 1 шт. (вкладка Сигналы → Запись в список сигналов);
график - 1 шт. (вкладка Вывод данных → Временной график).
Рисунок 32. Субмодель генератора нагрузки
61
В свойствах блоков Ступенька задайте соответственно Время
срабатывания t = [10], t = [50], t = [100], t = [150], Начальное состояние y0 = [0]
и Конечное состояние yk = [1] для всех звеньев.
В свойствах блока Запись в список сигналов в строке Имена сигналов
signals укажите переменную f (рис. 33).
Рисунок 33. Окно свойств блока Запись в список сигналов
Вызовите Редактор сигналов проекта, для чего в Главном меню
Главного окна выберите: «Сервис → Сигналы…» (рис. 34).
Рисунок 34. Меню вызова окна редактирования списка сигналов проекта
Создайте глобальный сигнал f, соответствующий величине нагрузки на
объект. Для этого в нижней части появившегося окна нажмите на кнопку
Добавить сигнал, после чего появится новый сигнал. Настройте его атрибуты
(рис. 35).
62
Рисунок 35. Окно настройки редактора сигналов проекта
Выйдите из субмодели в пространство основной структурной схемы.
7. Создайте субблок регулятора для линейной САР, реализующего ПИзакон (рис. 36). Понадобится блок макроблок -1 шт. (вкладка Субструктуры →
Субмодель).
Рисунок 36. Субблок регулятора для линейной САР
Перейдите во вложение блока Субмодель, наведя на него курсор мыши и
сделав двойной щелчок левой кнопкой. Наполните структуру следующими
блоками (рис. 37), задайте соответствующие имена портов субмодели и
поясняющие подписи блоков:
вход - 2 шт. (вкладка Субструктуры → Порт входа);
выход - 1 шт. (вкладка Структуры → Порт выхода);
суммирующий элемент - 1 шт. (вкладка Операторы → Сумматор);
сравнивающее устройство - 1 шт. (вкладка Операторы →
Сравнивающее устройство);
усилительное звено - 1 шт. (вкладка Операторы → Усилитель);
интегратор - 1 шт. (вкладка Динамические → Интегратор).
Рисунок 37. Субмодель регулятора линейной САР
63
Рассчитайте настройки регулятора с передаточной функцией вида:
1
𝑅1 (𝑠) = 𝑘𝑝1 + 𝑘𝑖 1 ∙ ,
𝑠
используя формулы:
𝑘𝑝 1 =
0,7𝑇оу
𝑘0 𝜏оу
,
(19)
𝑇𝑖𝑧 1 = 0,7𝑇оу .
(20)
Определите коэффициент усиления при интегральной составляющей:
𝑘𝑖 1 =
𝑘𝑝
1
𝑇𝑖𝑧 1
.
(21)
Вызовите Редактор сигналов проекта и создайте еще два глобальных
сигнала kp_1 (𝑘𝑝1 ), ki_1 (𝑘𝑖 1 ), соответствующих рассчитанным настройкам ПИрегулятора в САР линейным объектом по формулам (19) и (21), настройте их
атрибуты (рис. 38).
Рисунок 38. Окно настройки редактора сигналов проекта
В свойствах блока Усилитель (Пропорциональная составляющая) вместо
численного значения параметра Коэффициент усиления 𝑘 задайте переменную
kp_1. В свойствах блока Интегратор (Интегральная составляющая) вместо
параметра Коэффициент усиления 𝑘 задайте переменную ki_1 (рис. 39).
64
Рисунок 39. Настройка ПИ-регулятора в САР линейным объектом с использованием
глобальных сигналов
Выйдите из субмодели в пространство основной структурной схемы.
8. Создайте субблок регулятора для нелинейной САР, реализующего ПИзакон (рис. 40). Понадобится блок макроблок - 1 шт. (вкладка Субструктуры →
Субмодель).
Рисунок 40. Субблок регулятора нелинейной САР
Перейдите во вложение блока Субмодель, наведя на него курсор мыши и
сделав двойной щелчок левой кнопкой. Наполните структуру следующими
блоками (рис. 41), задайте соответствующие имена портов субмодели и
поясняющие подписи блоков:
вход - 2 шт. (вкладка Субструктуры → Порт входа);
выход - 1 шт. (вкладка Структуры → Порт выхода);
суммирующий элемент - 1 шт. (вкладка Операторы → Сумматор);
сравнивающее устройство 1 шт. (вкладка Операторы →
Сравнивающее устройство);
усилительное звено - 1 шт. (вкладка Операторы → Усилитель);
интегратор - 1 шт. (вкладка Динамические → Интегратор).
65
Рисунок 41. Субмодель регулятора нелинейной САР
Рассчитайте настройки регулятора с передаточной функцией вида:
1
𝑅2 (𝑠) = 𝑘𝑝 2 + 𝑘𝑖 2 ∙ ,
𝑠
используя формулы:
𝑘𝑝 2 =
0,7𝑇оу
,
(22)
𝑇𝑖𝑧 2 = 0,7𝑇оу .
(23)
𝑘0 𝜏оу
Определите коэффициент усиления при интегральной составляющей:
𝑘𝑖 2 =
𝑘𝑝
2
𝑇𝑖𝑧 2
.
(24)
Вызовите Редактор сигналов проекта и создайте еще два глобальных
сигнала kp_2 (𝑘𝑝 2 ), ki_2 (𝑘𝑖 2 ), соответствующих рассчитанным настройкам ПИрегулятора в САР нелинейным объектом по формулам (22) и (24), настройте их
атрибуты (рис. 42).
Рисунок 42. Окно настройки редактора сигналов проекта
В свойствах блока Усилитель (Пропорциональная составляющая) вместо
численного значения параметра Коэффициент усиления 𝑘 задайте переменную
66
kp_2. В свойствах блока Интегратор (Интегральная составляющая) вместо
параметра Коэффициент усиления 𝑘 задайте переменную ki_2 (рис. 43).
Рисунок 43. Настройка ПИ-регулятора в САР нелинейным объектом с
использованием глобальных сигналов
9. С использованием созданных субмоделей соберите расчетную схему для
моделирования замкнутых одноконтурных САР линейным и нелинейным
объектом (рис. 44), сделайте поясняющие подписи блоков. Дополнительно
понадобятся блоки:
константа - 1 шт. (вкладка Источники → Константа);
суммирующий элемент - 2 шт. (вкладка Операторы → Сумматор);
график - 1 шт. (вкладка Вывод данных → Временной график).
В свойствах блока Константа установите Значение a = [0], что будет
соответствовать определенному равновесному состоянию систем. В свойствах
блока Временной график задайте Количество входных портов InPortCount = 3.
67
Рисунок 44. Расчетная схема для сравнения работы САР с линейным и нелинейным
объектом
Запустите схему на расчет (кнопка
или клавиша F9). Снимите
переходные процессы в линейной и нелинейной САР. Включите
соответствующий график в отчет.
Проанализируйте полученный результат моделирования. Оцените диапазон
робастности двух САР.
10. Пересчитайте настройки ПИ-регулятора для САР нелинейным объектом
при различных значениях его коэффициента усиления (в зависимости от
величины нагрузки 𝑓). Соответствующие значения коэффициента усиления
можно рассчитать по формуле (18) либо взять из графика «Коэффициент
усиления объекта» в субблоке «Нелинейная модель объекта» (рис. 30), после
чего их необходимо подставить в формулу (22).
11. Перейдите в субмодель «ПИ-регулятор» для САР нелинейным
объектом. Напишите скрипт для корректировки настроек регулятора с учетом
известных значений нагрузки. Окно редактирования скрипта доступно по
нажатию кнопки «Скрипт» на Панели инструментов Схемного окна (рис. 45).
Рисунок 45. Меню вызова окна редактирования скрипта субмодели
В поле ввода скрипта введите следующий текст (рис. 46):
68
Рисунок 46. Скрипт для перерасчета настроек регулятора
То есть в зависимости от переменной f, характеризующей величину
нагрузки на объект, с помощью скрипта автоматически будут задаваться
оптимальные настройки регулятора для текущих параметров передаточной
функции нелинейного объекта управления.
Настройки ПИ-регулятора в САР линейным объектом оставьте без
изменения.
12. Повторно запустите схему на расчет (кнопка
или клавиша F9).
Снимите переходные процессы в линейной и нелинейной САР с учетом
перенастройки регулятора в САР нелинейным объектом. Включите
соответствующие графики в отчет. Проанализируйте полученный результат.
13. Сохраните расчетную схему с выполненной лабораторной работой. Для
этого в Главном меню Главного окна SimInTech нужно выбрать пункт «Файл
→ Сохранить проект как...» и далее, используя стандартный диалог, сохранить
файл, указав соответствующий путь и имя файла — «Работа САУ9_2.prt».
14. Оформите отчет о выполнении практического задания, указав:
цель работы;
индивидуальное задание;
настройки регуляторов;
расчетную схему с одноконтурными САР линейным и нелинейным
объектами;
графики переходных процессов в линейной и нелинейной САР;
выводы по работе.
69
Контрольные вопросы
1. Чем обусловлена нелинейность САР в данной лабораторной работе?
2. Дать определение коэффициента усиления объекта управления.
3. Выполняется ли принцип суперпозиции для нелинейной САР?
4. В чем сущность Тейлоровской линеаризации.
5. Понятие рабочей точки процесса.
6. Что такое «нагрузка» объекта управления?
7. Что такое робастность САР?
8. При каких условиях состоятельна линейная модель объекта?
9. Что происходит с качеством регулирования реальным нелинейным
объектом в условиях изменяющейся нагрузки и почему?
70
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 10
«СРАВНИТЕЛЬНЫЙ АНАЛИЗ РАБОТЫ ЛИНЕЙНОЙ И
НЕЛИНЕЙНОЙ САР»
Цель работы — сравнить работу линейной САР с П-регулятором и
нелинейной САР с релейным регулятором.
Описание работы
Любая САР, работающая в линейном режиме, по мере возрастания в ней
сигналов становится нелинейной. Например, всегда при увеличении воздействий
на технологические объекты проявляется такой тип нелинейности, как
«ограничение». При этом свойства нелинейной САР могут существенно
отличаться от свойств линейной САР. Кроме того, некоторые САР или их
элементы при любом уровне сигналов являются нелинейными.
В данной работе сравниваются два варианта замкнутой САР с
регулированием по отклонению. Первый вариант — типовая линейная САР с Прегулятором, второй вариант — нелинейная САР с релейным регулятором.
Работа нелинейной САР основывается на том, что релейный регулятор, в
зависимости от величины и знака отклонения регулируемой величины от
задания, подает на линейную часть положительное, отрицательное или нулевое
позиционное управляющее воздействие. Линейная часть обладает инерцией и
реагирует на эти воздействия непрерывным во времени сигналом.
Статическая характеристика нелинейного элемента имеет вид, показанный
на рис.47.
Рисунок 47. Статическая характеристика релейного регулятора
71
Порядок выполнения практического занятия
1. Запустите среду SimInTech.
2. Создайте новый проект «Файл → Новый проект → Схема модели
общего вида».
3. Настройте расчетные параметры схемы. Установите Начальный шаг
интегрирования startstep = 0, Конечное время расчета endtime = 100
(выбирается из соображения того, чтобы переходные процессы успевали
завершиться), Максимальный шаг hmax = 0.01.
4. Перед продолжением работы сохраните схему в файл с новым именем в
своей рабочей папке. Для этого в Главном меню выбрать пункт «Файл →
Сохранить проект как...» и далее, используя стандартный диалог, нужно
сохранить файл, указав соответствующий путь и имя файла – «Работа
САУ10.prt».
5. Перенесите на схемное окно SimInTech блоки:
генератор ступенчатого сигнала - 2 шт. (вкладка Источники →
Ступенька);
реле
- 1 шт. (вкладка Нелинейные → Релейное с зоной
нечувствительности);
усилительное звено - 1 шт. (вкладка Операторы → Усилитель);
передаточная функция 2 шт. (вкладка Динамические →
Передаточная функция общего вида);
суммирующий элемент - 1 шт. (вкладка Операторы → Сумматор);
сравнивающее устройство - 2 шт. (вкладка Операторы →
Сравнивающее устройство);
график - 2 шт. (вкладка Вывод данных → Временной график).
6. Соберите расчетную схему для сравнительного анализа работы линейной
и нелинейной САР (рис. 48).
В свойствах верхнего блока Ступенька задайте Время срабатывания
t = [0], Начальное состояние y0 = [0], Конечное состояние yk = [1]. В свойствах
нижнего блока Ступенька задайте Время срабатывания t = [40], Начальное
состояние y0 = [0], Конечное состояние yk = [1].
То есть генератор задания будет формировать единичную ступеньку в
нулевой момент времени и ее приращение на 1 через 40 сек после запуска
процесса моделирования.
Пусть передаточная функция объекта управления имеет вид:
𝑊(𝑠) =
62
.
8𝑠 2 +2𝑠+1
72
Рисунок 48. Расчетная схема 1
Введите параметры модели объекта. Для этого в свойствах блоков
Передаточная функция общего вида задайте Коэффициенты числителя 𝑏,
Коэффициенты знаменателя 𝑎 согласно заданной передаточной функции
объекта, Начальные условия y0 = [0]. Ввод коэффициентов осуществляется в
порядке возрастания степени при s.
Задайте настройку П-регулятора. Для этого в свойствах блока Усилитель
задайте Коэффициент усиления 𝑎. Для заданного объекта приближенное
значение a будет равняться 0,2.
Настройте релейный регулятор. В свойствах блока Релейное с зоной
нечувствительности
задайте
первоначальную
ширину
зоны
нечувствительности 0 и амплитуду срабатывания реле ±0,06, реализовав тем
самым идеальное двухпозиционное реле. Для этого установите Нижнюю границу
зоны нечувствительности a = [0], Нижнюю границу переключения a1 = [0],
Верхнюю границу зоны нечувствительности b = [0], Верхнюю границу
переключения b1 = [0], Нижнее значение функции Y1 = [-0.06]. Верхнее значение
функции Y2 = [0.06]. Остальные параметры оставьте по умолчанию.
В свойствах блока Временной график для снятия графиков переходных
процессов на выходе систем задайте Количество входных портов
InPortCount = 3. В свойствах блока Временной график для снятия графиков
управляющих воздействий задайте Количество входных портов InPortCount = 2.
Для построения фазовых портретов требуется выполнить операцию
дифференцирования выходных переменных САР, для чего нужно преобразовать
73
исходную схему к виду, представленному на рис. 49, добавив дополнительные
блоки:
производная - 2 шт. (вкладка Динамические → Производная);
фазовый портрет - 2 шт. (вкладка Вывод данных → Фазовый портрет).
Рисунок 49. Расчетная схема 2
7. Запустите схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9. В строке отображения расчетной информации
Схемного окна должна появиться надпись: «Конечное время достигнуто
(time = 100)», в противном случае в схеме была допущена ошибка. Снимите
переходные процессы с выходов, графики изменения управляющих воздействий
и фазовые портреты для линейной и нелинейной САР.
8. Дайте
сравнительную
оценку
быстродействия
и
качества
установившегося режима в САР с П-регулятором и в САР с релейным
регулятором. Чем отличается вид управляющих воздействий? Проанализируйте
фазовые портреты систем, соответствующие переходным процессам. Какой тип
имеет фазовый портрет линейной и нелинейной САР?
9. Исследуйте влияние амплитуды срабатывания релейного регулятора на
качество работы нелинейной САР.
Для этого в свойствах блока Релейное с зоной нечувствительности
задайте значения выше и ниже первоначального значения амплитуды.
74
Последовательно для каждого из этих значений промоделируйте работу
нелинейной САР.
Как сказывается увеличение амплитуды срабатывания нелинейного
элемента на быстродействии и колебательности нелинейной САР? Когда в
контуре наблюдаются устойчивые автоколебания? Зависят ли амплитуда и
частота автоколебаний от значения параметров Y1, Y2? В режиме устойчивых
автоколебаний выполняет ли нелинейная САР должным образом задачу
слежения и стабилизации?
С помощью моделирования отыщите наилучшие значения параметров Y1,
Y2 нелинейного регулятора, при которых качество работы САР возрастает.
10. Исследуйте влияние ширины зоны нечувствительности релейного
регулятора на качестве работы нелинейной САР.
Для этого в свойствах блока Релейное с зоной нечувствительности
введите первоначальные значения параметров Y1, Y2, равные −0,06 и 0,06.
Далее, меняя параметры Нижняя и верхняя граница зоны нечувствительности
𝑎, 𝑏, промоделируйте работу нелинейной САР. При этом параметры Нижняя и
верхняя граница переключения 𝑎1, 𝑏1 должны равняться соответствующим
введенным значениям 𝑎 и 𝑏 (т.е. 𝑎1 = 𝑎, 𝑏1 = 𝑏).
Как сказывается увеличение зоны нечувствительности нелинейного
элемента на качестве работы нелинейной САР? Куда смещается точка
равновесия? Справляется ли САР с задачей слежения и стабилизации? Что
происходит с управляющим воздействием?
С помощью моделирования отыщите наилучшие значения параметров
𝑎 = 𝑎1, 𝑏 = 𝑏1 нелинейного регулятора, при которых качество работы САР
возрастает.
11. Исследование работы нелинейной САР в режиме скольжения.
Режим скольжения позволяет ускорить переход нелинейной САР в
устойчивое состояние или в режим устойчивых автоколебаний. Скольжение
можно обеспечить введением в контур дифференцирующего звена, например,
поместив его в обратную связь.
Преобразуйте исходную расчетную схему, как на рис. 50, добавив блоки:
константа - 1 шт. (вкладка Источники → Константа);
производная - 1 шт. (вкладка Динамические → Производная);
перемножитель - 1 шт. (вкладка Операторы → Перемножитель);
суммирующий элемент - 1 шт. (вкладка Операторы → Сумматор).
75
Рисунок 50. Расчетная схема 3
В свойствах блока Релейное с зоной нечувствительности введите
первоначальные значения параметров 𝑌1, 𝑌2, 𝑎, 𝑏, 𝑎1, 𝑏1.
В свойствах блока Константа задайте начальное Значение а = [0.01], оно
будет определять весовой коэффициент вводимого в обратную связь нелинейной
САР дифференцирующего звена.
Запустите схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9. В строке отображения расчетной информации
Схемного окна должна появиться надпись: «Конечное время достигнуто
(time = 100)», в противном случае в схеме была допущена ошибка. Снимите
переходные процессы и фазовые портреты в линейной и нелинейной САР.
Промоделируйте работу нелинейной САР, постепенно увеличивая в
свойствах блока Константа весовой коэффициент a до тех пор, пока не удастся
перевести систему в «режим скольжения».
Сравните быстродействие и качество установившегося режима в линейной
САР и нелинейной САР, работающей в режиме скольжения. Как изменяется
фазовый портрет нелинейной САР? Удается ли за счет скольжения уменьшить
амплитуду автоколебаний? Влияет ли режим скольжения на частоту
срабатывания релейного регулятора?
76
12. Сохраните расчетную схему «Файл → Сохранить проект». Оформите
отчет о выполнении практического задания, указав:
цель работы;
расчетные схемы моделируемых систем;
графики изменения регулируемых переменных в линейной и
нелинейной САР;
графики изменения управляющих воздействий в линейной и нелинейной
САР;
фазовые портреты линейной и нелинейной САР;
ответы на вопросы, поставленные в пунктах 8, 9, 10, 11.
Контрольные вопросы
1. Релейный регулятор.
2. Каковы отличия в работе линейной САР с П-регулятором и нелинейной
САР с релейным регулятором?
3. Перечислите методы исследования нелинейных систем.
4. В чем суть фазового метода?
5. Дайте определение фазового пространства.
6. Когда фазовое пространство вырождается в фазовую плоскость?
7. Дайте определение изображающей точки.
8. Дайте определение фазовой траектории.
9. Дайте определение фазового портрета.
10. Приведите примеры особых точек равновесия.
11. Приведите примеры особых линий равновесия.
12. Дайте характеристику положения равновесия – «центр».
13. Дайте характеристику положения равновесия – «устойчивый фокус».
14. Дайте характеристику положения равновесия – «неустойчивый фокус».
15. Дайте характеристику положения равновесия – «устойчивый узел».
16. Дайте характеристику положения равновесия – «неустойчивый узел».
17. Дайте характеристику положения равновесия – «седло».
18. Перечислите общие правила построения фазовых траекторий.
19. Перечислите особенности фазовых портретов нелинейных систем.
20. Дайте определение устойчивого предельного цикла
21. Дайте определение полуустойчивого предельного цикла
22. Дайте определение неустойчивого предельного цикла
23. Дайте определение автоколебательного режима.
24. Дайте определение скользящего режима работы нелинейной САР.
77
25. Что такое вырожденная траектория?
78
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 11
«ИССЛЕДОВАНИЕ АВТОКОЛЕБАНИЙ В НЕЛИНЕЙНОЙ
САР»
Цель работы — исследовать автоколебательный
нелинейной САР и определить его параметры.
режим
работы
Описание работы
Для нелинейных САР характерно возникновение специфических режимов
работы, которые на фазовой плоскости будут представлять собой предельные
устойчивые циклы (рис. 51).
Рисунок 51. Предельный цикл и соответствующая временная характеристика
Автоколебания – незатухающие колебания в нелинейной САР,
возникновение и частота которых полностью определяются внутренними
свойствами самой системы, а не внешними воздействиями. При этом амплитуда
и частота не зависят от начальных условий.
Под устойчивостью автоколебаний понимают их возможность
осуществления и стремление к удержанию постоянства параметров как по
амплитуде, так и по частоте при всех возможных влияниях на систему.
79
После гармонической линеаризации исследуемую систему можно
представить в виде, как на рис. 52, и исследовать по характеристическому
уравнению.
Рисунок 52. Линеаризованная нелинейная САР
где 𝑊лч (𝑠) =
𝐸(𝑠)
𝐷(𝑠)
— передаточная функция линейной части,
𝑊н (𝑠) – гармоническая передаточная функция нелинейной части после
линеаризации.
Тогда для аналитического определения амплитуды и частоты
автоколебаний и анализа их на устойчивость можно использовать следующий
метод, который рассмотрим на примере нелинейной САР, линейная часть
которой описывается передаточной функцией вида:
𝑊лч (𝑠) =
𝑦
𝑧
=
𝑘
1
∙
1
𝑇1 𝑠+1 𝑇2 𝑠+1
∙ ,
𝑠
а нелинейность представляет собой идеальное двухпозиционное реле:
𝑧
4𝐵
𝑥
𝜋𝐴
𝑊н (𝐴) = =
.
Тогда:
𝑧=
{
𝑦 = (𝑇
4𝐵
𝜋𝐴
𝑘
∙ 𝑥,
1 𝑠+1)(𝑇2 𝑠+1)𝑠
∙𝑧
,
и уравнение гармонически линеаризованной замкнутой системы примет вид:
𝑦 ∙ (𝑇1 𝑠 + 1)(𝑇2 𝑠 + 1)𝑠 = 𝑘 ∙
4𝐵
∙ (−𝑦).
𝜋𝐴
Отсюда получаем характеристическое уравнение:
(𝑇1 𝑠 + 1)(𝑇2 𝑠 + 1)𝑠 + 𝑘 ∙
4𝐵
𝜋𝐴
= 0.
или:
(𝑇1 𝑇2 𝑠 3 + 𝑇1 𝑠 2 + 𝑇2 𝑠 2 + 𝑠) + 𝑘 ∙
4𝐵
𝜋𝐴
= 0.
После подстановки 𝑠 = 𝑗𝜔, получим:
−𝑇1 𝜔2 − 𝑇2 𝜔2 + 𝑗𝜔(1 − 𝑇1 𝑇2 𝜔2 ) + 𝑘 ∙
4𝐵
𝜋𝐴
= 0.
Откуда:
80
4𝐵
𝑋 = −𝑇1 𝜔2 − 𝑇2 𝜔2 + 𝑘 ∙
= 0,
{
𝜋𝐴
𝑌 = 𝜔(1 − 𝑇1 𝑇2 𝜔2 ) = 0.
Если решение относительно 𝐴 и 𝜔 существует, то в системе возможны
автоколебания. Из второго уравнения находим частоту автоколебаний:
𝜔(1 − 𝑇1 𝑇2 𝜔2 ) = 0,
1 − 𝑇1 𝑇2 𝜔2 = 0,
𝝎∗ = √
𝟏
𝑻𝟏 𝑻𝟐
,
(25)
после чего подставляем частоту в первое уравнение и находим амплитуду:
−𝑇1
1
𝑇1 𝑇2
1
−
𝑇2
− 𝑇2
−
𝑘∙
1
𝑇1 𝑇2
+𝑘∙
+𝑘∙
𝑇1
4𝐵
=
4𝐵
𝜋𝐴
𝑇1 +𝑇2
𝜋𝐴
𝑇1 𝑇2
𝟒𝑩𝑻𝟏 𝑻𝟐
𝑨∗ = 𝒌 ∙
Чтобы определить
неравенство:
1
𝝅(𝑻𝟏 +𝑻𝟐 )
устойчивость
4𝐵
𝜋𝐴
= 0,
= 0,
,
.
автоколебаний,
(26)
нужно
проверить
𝜕𝑋 𝜕𝑌
𝜕𝑋 𝜕𝑌
∙
−
∙
)
(
)>0
𝜕𝐴∗ 𝜕𝜔 ∗
𝜕𝜔 ∗ 𝜕𝐴∗
или, если подставить найденные значения амплитуды и частоты:
(
4𝐵
(−𝑘 ∙ 𝜋(𝐴∗)2) ∙ (1 − 𝑇1 𝑇2 (𝜔∗ )2 ) > 0.
Порядок выполнения практического занятия
1. Запустите среду SimInTech.
2. Создайте новый проект «Файл → Новый проект → Схема модели
общего вида».
3. Настройте расчетные параметры схемы. Установите Начальный шаг
интегрирования startstep = 0, Конечное время расчета endtime = 200
(выбирается из соображения того, чтобы переходные процессы успевали
завершиться), Максимальный шаг hmax = 0.01, Метод интегрирования
intmet = Адаптивный 1 (рис. 53).
4. Перед продолжением работы сохраните схему в файл с новым именем в
своей рабочей папке. Для этого в Главном меню выбрать пункт «Файл →
Сохранить проект как...» и далее, используя стандартный диалог, сохранить
файл, указав соответствующий путь и имя файла – «Работа САУ11.prt».
81
Рисунок 53. Настройки модели
5. Перенесите на схемное окно SimInTech блоки:
генератор ступенчатого сигнала 1 шт. (вкладка Источники →
Ступенька);
реле - 1 шт. (вкладка Нелинейные → Гистерезис);
передаточная функция - 2 шт. (вкладка Динамические → Инерционное
звено 1-го порядка);
интегратор - 1 шт. (вкладка Динамические → Интегратор);
производная - 1 шт. (вкладка Динамические → Производная);
сравнивающее устройство 1 шт. (вкладка Операторы →
Сравнивающее устройство);
график - 1 шт. (вкладка Вывод данных → Временной график);
фазовый портрет 1 шт. (вкладка Вывод данных → Фазовый портрет).
6. Соберите расчетную схему для моделирования работы нелинейной САР
(рис. 54).
Рисунок 54. Расчетная схема нелинейной САР
82
7. В свойствах блока Ступенька задайте Время срабатывания t = [0],
Начальное состояние y0 = [0], Конечное состояние yk =[0]. То есть система
будет находиться в некотором равновесном состоянии.
8. Введите параметры линейной части. Для этого в свойствах блоков
Инерционное звено 1-го порядка задайте Коэффициенты усиления k,
Постоянные времени T согласно своему варианту из табл. 13, Начальные условия
х0=[0].
Таблица 13. Параметры линейной части системы
Вариант
1
2
3
4
5
6
7
8
9
10
𝑘
0,45
0,6
10
25
5
11
2,4
0,23
0,4
6
𝑇1
2,3
1,4
0,03
5
1,6
0,32
0,5
1
3
0,2
𝑇2
3.6
4.1
1.1
3
0.3
1.75
5
0.15
1
1.5
9. Введите параметры нелинейного элемента. В свойствах блока Гистерезис
установите Нижнюю границу переключения a = [0], Верхнюю границу
переключения b = [0], реализовав тем самым идеальное двухпозиционное реле.
Задайте Нижнее значение функции Y1 = [-1], Верхнее значение функции Y2=[1],
Начальные условия х0=[0].
10. В свойствах блока Временной график для снятия графика переходного
процесса на выходе нелинейной САР задайте Количество входных портов
InPortCount = 1.
11. Запустите схему на расчет нажатием кнопки Пуск
на Панели
инструментов или клавиши F9. В строке отображения расчетной информации
Схемного окна должна появиться надпись: «Конечное время достигнуто
(time = 200)», в противном случае в схеме была допущена ошибка.
12. Снимите переходный процесс с выхода нелинейной САР и фазовый
портрет нелинейной САР. Включите их в отчет по работе.
13. Измерьте параметры автоколебаний по переходному процессу (рис. 51)
и занесите результаты в табл. 14 (2-й столбец).
83
14. Измерьте параметры автоколебаний по фазовому портрету (рис. 51) и
занесите результаты в табл. 14 (3 столбец).
15. Рассчитайте параметры автоколебаний по формулам (25)-(26), занесите
их также в табл. 14 (4 столбец). Сопоставьте их с экспериментальными.
84
По формулам
По формулам
По формулам
Эксперимент
ально
↑ 𝑇max ЛЧ
Эксперимент
ально
↓ 𝑇max ЛЧ
Эксперимент
ально
↑ 𝑘 ЛЧ
Эксперимент
ально
↓ 𝑘 ЛЧ
По формулам
По формулам
По фазовому
портрету
По переходному
процессу
Таблица 14. Параметры автоколебаний
𝐴
𝜔
16. Исследуйте влияние начальных условий на амплитуду и частоту
автоколебаний.
Для этого измените начальные условия для регулируемой переменной и ее
производной. То есть в одном из блоков Инерционное звено 1-го порядка или
Интегратор или во всех сразу установите произвольные ненулевые Начальные
условия х0. То же самое выполните для блока Производная. Запустите схему на
расчет еще раз нажатием кнопки Пуск на Панели инструментов или клавиши
F9. Измерьте параметры автоколебаний по экспериментальным зависимостям и
занесите результаты в табл. 14 (5-й столбец). Сделайте вывод о влиянии
начальных условий на автоколебательный режим. Верните настройки схемы к
исходным.
17. Исследуйте влияние коэффициента усиления линейной части в
нелинейной САР на амплитуду и частоту автоколебаний.
Для этого в блоке Инерционное звено 1-го порядка измените значение
Коэффициенты усиления 𝑘 в сторону уменьшения. Запустите схему на расчет
еще раз нажатием кнопки Пуск
на Панели инструментов или клавиши F9.
Измерьте параметры автоколебаний по экспериментальным зависимостям и
занесите результаты в табл. 14 (6-й столбец). Верните настройки схемы к
исходным.
Рассчитайте для выбранного коэффициента усиления параметры
автоколебаний по формулам (25)-(26), занесите результаты в таблицу 11.2 (6
столбец) и сравните их с результатами моделирования.
Повторите аналогичные действия для случая увеличения коэффициента
усиления линейной части. Результаты также занесите в табл. 14 (7-й столбец).
Верните настройки схемы к исходным.
85
Проделайте эксперимент 4 раза (2 при ↓ 𝑘, 2 при ↑ 𝑘) и постройте
приближенную зависимость 𝑨(𝒌) и 𝝎(𝒌). Сделайте вывод о влиянии
коэффициента усиления системы на автоколебательный режим.
18. Исследуйте влияние инерционных свойств нелинейной САР
(наибольшей постоянной времени) на амплитуду и частоту автоколебаний.
Для этого в блоке Инерционное звено 1-го порядка измените значение
наибольшей Постоянной времени 𝑇 в сторону уменьшения. Запустите схему на
расчет еще раз нажатием кнопки Пуск на Панели инструментов или клавиши
F9.
Измерьте параметры автоколебаний по экспериментальным зависимостям и
занесите результаты в табл. 14 (8-й столбец). Верните настройки схемы к
исходным.
Рассчитайте для выбранной постоянной времени параметры автоколебаний
по формулам (25)-(26), занесите результаты в табл. 14 (8-й столбец) и сравните
их с результатами моделирования.
Повторите аналогичные действия для случая увеличения наибольшей
постоянной времени линейной части. Результаты также занесите в табл. 11.2 (9й столбец). Верните настройки схемы к исходным.
Проделайте эксперимент 4 раза (2 при ↓ 𝑇max , 2 при ↑ 𝑇max ) и постройте
приближенную зависимость 𝑨(𝑻𝐦𝐚𝐱 ) и 𝝎(𝑻𝐦𝐚𝐱 ). Сделайте вывод о влиянии
инерционности системы на автоколебательный режим.
19. Сохраните расчетную схему «Файл → Сохранить проект». Оформите
отчет о выполнении практического задания, который должен содержать:
цель работы;
расчетную схему моделируемой нелинейной системы;
график изменения регулируемой переменной в нелинейной САР;
фазовый портрет нелинейной САР;
заполненная сводная табл. 14 с результатами расчетов и экспериментов;
ответы на вопросы, поставленные в пунктах 15, 16, 17, 18.
графики зависимости амплитуды и частоты автоколебаний от
коэффициента усиления системы;
графики зависимости амплитуды и частоты автоколебаний от
инерционности системы.
Контрольные вопросы
1. В чем суть гармонической линеаризации?
2. В чем отличие гармонической линеаризации от обычной?
86
3. В чем суть аналитического метода определения автоколебаний?
4. Как определить устойчивость автоколебаний аналитическим методом?
5. В чем суть метода гармонического баланса Гольдфарба:
6. Как строится обратная АФЧХ нелинейности с обратным знаком?
87
СПИСОК ИСТОЧНИКОВ И ЛИТЕРАТУРЫ
1. Пиотровский Д.Л. Системы автоматического управления. Часть 1
[Электронный ресурс]: практикум / Пиотровский Д.Л., Антонов С.В. — М.:
МИРЭА – Российский технологический университет, 2023. — 1 электрон. опт.
диск (CD-ROM)
2. Антимиров, В. М. Системы автоматического управления : учебное
пособие для вузов / В. М. Антимиров ; под научной редакцией В. В. Телицина.
— Москва : Издательство Юрайт, 2022. — 91 с. — (Высшее образование). —
ISBN 978-5-9916-9906-8. — Текст : электронный // Образовательная платформа
Юрайт [сайт]. — URL: https://urait.ru/bcode/492240 (дата обращения: 05.09.2023).
3. Пигарев, Л. А. Микропроцессорные системы автоматического
управления : учебное пособие / Л. А. Пигарев. — Санкт-Петербург : СПбГАУ,
2017. — 178 с. — Текст : электронный // Лань : электронно-библиотечная
система. — URL: https://e.lanbook.com/book/162813 (дата обращения:
05.09.2023). — Режим доступа: для авториз. пользователей.
4. Кудинов, Ю. И. Теория автоматического управления (с использованием
MATLAB — SIMULINK) : учебное пособие / Ю. И. Кудинов, Ф. Ф. Пащенко. —
3-е изд., стер. — Санкт-Петербург : Лань, 2019. — 312 с. — ISBN 978-5-81141994-4. — Текст : электронный // Лань : электронно-библиотечная система. —
URL: https://e.lanbook.com/book/111198 (дата обращения: 05.09.2023). — Режим
доступа: для авториз. пользователей.
5. Петраков, Ю. В. Теория автоматического управления технологическими
системами : учебное пособие / Ю. В. Петраков, О. И. Драчев. — Москва :
Машиностроение, 2009. — 336 с. — ISBN 978-5-217-03391-1. — Текст :
электронный // Лань : электронно-библиотечная система. — URL:
https://e.lanbook.com/book/751 (дата обращения: 05.09.2023). — Режим доступа:
для авториз. пользователей.
6. Певзнер, Л. Д. Теория автоматического управления. Задачи и решения :
учебное пособие / Л. Д. Певзнер. — Санкт-Петербург : Лань, 2016. — 604 с. —
ISBN 978-5-8114-2161-9. — Текст : электронный // Лань : электроннобиблиотечная система. — URL: https://e.lanbook.com/book/75516 (дата
обращения: 05.09.2023). — Режим доступа: для авториз. пользователей.
88
ПРИЛОЖЕНИЕ А
Рисунок А.1. Оптимальные настройки П-регулятора:
1 — апериодический процесс, 2 — 20%-перерегулирование, 3 — 40%-процентное
перерегулирование
89
Рисунок А.2. Оптимальные настройки ПИ-регулятора
90
СВЕДЕНИЯ ОБ АВТОРАХ
Пиотровский Дмитрий Леонидович, д.т.н., профессор, профессор кафедры
промышленной информатики, Институт искусственного интеллекта ФГБОУ ВО
«МИРЭА — Российский технологический университет»
Гончаров Андрей Витальевич, кандидат технических наук, доцент,
заведующий кафедрой Систем автоматизированного управления факультета
Цифровых технологий МГУТУ им. К. Г. Разумовского (ПКУ).
Братцев Кирилл Евгеньевич, кандидат технических наук, членкорреспондент РАЕН
Антонов Сергей Валерьевич, старший преподаватель кафедры
промышленной информатики, Институт искусственного интеллекта ФГБОУ ВО
«МИРЭА — Российский технологический университет»
91