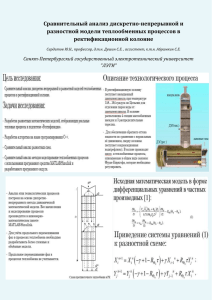
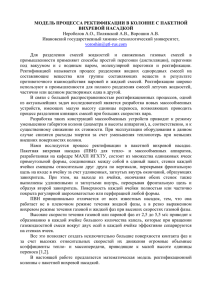
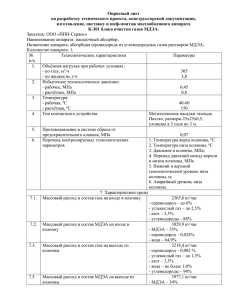
Проект выпускной квалификационной работы магистра Тема ВКР: Разработка живучих систем управления технологическими установками Работу выполнила студентка 428м группы Коршикова Александра Введение Тенденция развития Переход к максимально полной производственно-технических автоматизации технологического систем оборудования Частая причина отказов систем управления кроется в элементах, непосредственно соприкасающихся с технологическим оборудованием Датчики Исполнительные механизмы Желательно чтобы оборудование (во время отказа работы датчиков и ИМ) продолжало работать, пусть и с несколько сниженным, но регламентным качеством производства и производительностью до приезда обслуживающего систему персонала. Системы управления, которые обеспечивают указанные требования называются живучими. 2 Направления создания и исследования живучих систем 1-ое направление 2-ое направление 3-ие направление техническое резервирование датчиков и исполнительных механизмов с целью повышения надежности систем формирование множества управляющих устройств в соответствии с подключением возможных альтернативных каналов измерения и выдачи управляющих воздействий «-»: использование пассивных методов разработки отказоустойчивых систем управления «-»: «-»: высокая стоимость оборудования; отсутствие уверенности в используемых показателях интенсивности отказов переключение может стать причиной потери устойчивости при неправильном проектировании не рассмотрен синтез наблюдателя состояния; противоречие между надежностью и оптимальностью; полученный регулятор имеет очень небольшие коэффициенты передачи. 4-ое направление обобщение потенциальных возможностей стратегий активных и пассивных отказоустойчивых систем управления «-»: в регуляторах со скользящим режимом присутствуют высокочастотные вибрации → снижение: запаса устойчивости, качества переходных процессов. Это приводит к износу исполнительных устройств 5-ое направление исследование систем со случайной (случайноизменяемой) структурой «-»: знание достоверных статистических характеристик процесса переключения структур 3 Цели выпускной квалификационной работы Целями исследования являются: повышение живучести систем управления промышленными технологическими установками на основе использования в алгоритмическом обеспечении системы управления модели динамики технологического объекта; разработка методики создания живучей системы управления промышленными технологическими установками, создание живучей системы управления ректификационной колонной производства технического спирта. Задачами являются: создание методики разработки живучих систем управления для установок, описываемых линейными динамическими моделями высокой размерности, а также разработка живучей система управления ректификационной колонны установки производства пищевого спирта. 4 Методика конструирования живучих систем управления Условия реализации методики: математическая модель технологической установки должна быть задана в виде математической модели динамики; модель должна включать избыточное число каналов управления и каналов измерения, модель должна быть многомерной и многосвязной; для указанной модели задается типовая конфигурация системы управления, состоящая из выделенного подмножества каналов выдачи управления и каналов измерения; все управляемые переменные и управляющие воздействия должны иметь близкий диапазон изменения. 5 Методика конструирования живучих систем управления Модель многомерного управляемого и наблюдаемого объекта управления в дискретном времени зададим в виде: Выход из строя оборудования Поломка датчика диагностируется по : физической потере сигнала; показанию, которое выходит за пределы диапазона измерения; неадекватной скорости изменения показаний. Под поломкой исполнительного механизма будем понимать то, что он остановился в некотором фиксированном положении. В дальнейшем будем считать он остановился в положении от 40 до 100% открытия. реконфигурация блок выбора конфигурации: таблица решений 6 Методика конструирования живучих систем управления Решение матричного уравнения Риккати обозначим в виде процедуры dlqr: Расчет полного регулятора с наблюдателем состояния и моделью возмущений в виде скачка опишем следующим алгоритмом: 1. Сформируем расширенную модель системы, которая включает последовательно соединенные модели объекта управления и возмущений в виде скачка: 3. Решаем два уравнения Риккати: После расчета регулятор должен формировать следующий закон управления: 2. Сформируем начальные значения весовых матриц для регулятора и наблюдателя: 7 Разработка живучей системы управления ректификационной колонной Исходные данные: 1 – ректификационная колонна 2 – подогреватель потока питания 3 – куб-испаритель 4 – конденсатор (дефлегматор) 5 – флегмовая емкость Основные возмущения: отклонение концентрации спирта в дистилляте; давление пара в паропроводе; температуры охлаждающей воды Измеряемые переменные: у1 – давление внизу колонны, Па; у2 – давление вверху колонны, Па; у3 – температура внизу колонны, °С; у4 – температура вверху колонны, °С; у5 – температура вещества после дефлегматора, °С; у6 – температура воды после дефлегматора, °С Ректификационная колонна по производству этилового спирта Управляющие воздействия для колонны: расход дистиллята; расход пара; расход охлаждающей воды дефлегматора 8 Разработка живучей системы управления ректификационной колонной Далее в работе .. (рассчитать) ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? Включение управляющих механизмов определяются по формулам; Включение датчиков определяется по формулам Необходимость пересчета и стабилизации в новом режиме работы колонны Алгоритм функционирования живучей системы управления ректификационной колонной производства спирта в реальном времени 9 Предварительные выводы Результатом работы является создание методики создания живучих систем управления сложными технологическими установками на примере объекта управления ректификационной колонны по производству технического этилового спирта; Базой методики является задача синтеза линейно-квадратического многомерного оптимального регулятора; Разработаны правила реконфигурации живучей системы управления колонны в таблицы решений и совокупности логических правил; Получены уравнения, позволяющие пересчитывать номинальные значения управляющих расходов при отказах, а также изменять производительность колонны. 10 СПАСИБО ЗА ВНИМАНИЕ Список используемой литературы Knight J., Sullivan K., Elder M., Wang C. Survivability Architectures: Issues and Approaches. Proceedings DARPA Information Survivability Conference and Exposition. DISCEX'00. Hilton Head (SC, USA). 2000, vol.2, pp. 157-171, doi: 10.1109/DISCEX.2000.821517 Stekol'nikov Yu.I. Zhivuchest' sistem. [Survivability of systems]. Saint-Petersburg. 2002. 155 p. (in Russian). Aviziens A. Fault-Tolerant Systems. IEEE Transactions on Computers, 1976, vol. 25, no. 12, pp. 1304-1312. doi: 10.1109/TC.1976.1674598 Kashtanov V.A., Medvedev A.I. Teoriya nadezhnosti slozhnykh sistem [Reliability Theory of Complex Systems]. Moscow. 2010. 608 p. (in Russian). Jiang J., Yu X. Fault-Tolerant Control Systems: A Comparative Study Between Active and Passive Approaches. Annual Reviews in Control, 2012, vol. 36, no. 1, pp. 60-72. doi: 10.1016/j.arcontrol.2012.03.005 Amin A., Hasan K. A Review of Fault Tolerant Control Systems: Advancements and Applications. Measurement, 2019, vol. 143. pp. 58-68. doi: 10.1016/j.measurement.2019.04.083 Buravlev A., Kazakov I. A Model of the Reliability of a Self-Regenerating System With a Random Structure. Journal of Computer and Systems Sciences International, 2001, vol. 40, pp. 40-42. 12