В.Г. ВОРОБЬЕВ,
С.В. КУЗНЕЦОВ
АВТОМАТИЧЕСКОЕ
УПРАВЛЕНИЕ
ПОЛЕТОМ
САМОЛЕТОВ
Допущено
Департаментом
воздушного транспорта
Министерства транспорта России
8 качестве учебника
для студентов вузов
гражданской авиации
МОСКВА «ТРАНСПОРТ» 1995
УДК 629.735.05:621.3(075.8)
В. Г. Воробьев, С. В. Кузнецов. Автоматическое управление полетом самолетов: Учеб. для вузов.-М.: Транспорт. 1995.-448 с.
Изложены вопросы автоматизации самолетовождения. Даны
сведения об аналоговых и цифровых системах автоматического
управления, методах их исследования, обеспечении отказобезопасности и контроля, принципах построения пилотажно-навигационных
комплексов и их технической эксплуатации.
Для студентов вузов гражданской авиации.
Ил. 184, табл. 41, библиогр. 19 назв.
Рецензенты: д-р техн. наук Г.П. Чигин (кафедра пилотажнонавигационных комплексов ВВИА им. Н. Е. Жуковского), д-р техн.
наук А. В. Майоров.
Заведующий редакцией Л.В.Васильева
Редактор И.В.Иванова
Учебник
ВОРОБЬЕВ ВЛАДИМИР ГЕОРГИЕВИЧ
КУЗНЕЦОВ СЕРГЕЙ ВИКТОРОВИЧ
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
ПОЛЕТОМ САМОЛЕТОВ
Технические редакторы Л. Г. Дягилева, Л. А. Усенко
Корректор С. А. Сержант
ИБ № 4690
Лицензия № 010163 от 04.01.92 г.
Сдано в набор 13.10.93. Подписано в печать 22.12.94. Формат 60 х 88'/16- Бум.
тип. № 2. Гарнитура Тайме. Офсетная печать. Усл. печ. л. 27,44. Усл. кр-отт.
27,44. Уч-изд. л. 31. Тираж 1000 экз. Заказ 94Й С006. Изд. № 1-1-1/7 № 5983.
Ордена «Знак Почета» издательство «ТРАНСПОРТ»,
103064, Москва, Басманный туп., 6а
Набрано на Можайском полиграфкомбинате Комитета Российской
Федерации по печати. 143200, Можайск, ул. Мира, 93.
Отпечатано в Московской типографии № 4 Комитета Российской
Федерации по печати. 129041, Москва, Б. Переяславская, 46.
В
3206040000-006
049(01)-95
120-94
18В1Ч 5-277-01400-4
© В. Г. Воробьев, С. В. Кузнецов, 1995
ПРЕДИСЛОВИЕ
Технический прогресс в области автоматического управления полетом
самолетов потребовал нового подхода к изучению авиационного оборудования. Это явилось причиной существенного изменения ряда курсов учебных дисциплин в вузах гражданской авиации и коренной переработки
методического материала согласно новым учебным планам.
Учебник написан в соответствии с новой программой учебной дисциплины. В нем изложены основы теории автоматического управления полетом, принципы действия и особенности технической реализации различных
средств автоматического управления.
В разделе I рассмотрен самолет как объект управления. Изложены
основные положения динамики управления полетом, математические
модели пространственного движения самолета, динамика продольного
и бокового движения. В разделе II рассмотрены вопросы автоматизированного управления полетом: управление рулями, демпфирование колебаний
по угловым параметрам, улучшение устойчивости и управляемости, управление аэродинамическими силами. В разделе III рассмотрены вопросы
автоматического управления полетом: стабилизация и управление угловым
положением, управление траекторным движением на маршруте, при заходе
на посадку, на взлете и при посадке.
Учебник имеет двухуровневую структуру, что позволяет изучать материал по двум уровням обучения. Первый уровень обучения позволяет
познакомиться с основными принципами автоматизации управления полетом. Для этого не требуется глубокой математической подготовки. Второй
уровень обучения предусматривает углубленное изучение математических
моделей автоматического управления движением самолета.
Авторы выражают искреннюю признательность С. А. Арнольд, подготовившей рукопись к изданию. Ценные советы и конструктивные предложения профессора, доктора технических наук Г. П. Чигина и доктора
технических наук А. В. Майорова позволили существенно повысить качество учебника.
ВВЕДЕНИЕ
В 1914 г. на Всемирной выставке в Париже был зарегистрирован первый
официальный полет самолета с автоматическим управлением. Пролетая
над изумленной публикой на высоте 100 м, пилот высунулся из кабины,
подняв руки над головой. Успех был достигнут благодаря электрогироскопическому стабилизатору, обеспечивающему неподвижное положение
в пространстве небольшой площадки. Отклонение самолета относительно
этой площадки немедленно фиксировалось и выправлялось при помощи
пневматических рулевых машинок, связанных с органами управления.
Таким образом самолет удерживал определенное угловое положение
относительно Земли. Так было положено начало практической автоматизации управления полетом самолетов.
Необходимость автоматизации управления полета самолетов первоначально была обусловлена их недостаточной устойчивостью и управляемостью. Полет на таких самолетах требовал высокой техники пилотирования. Использование автоматических средств стабилизации самолета по
крену и тангажу облегчало труд пилота и делало полет менее опасным. По
мере увеличения продолжительности и дальности полетов возникла потребность разгрузить экипаж от утомительных и однообразных функций стабилизации самолета не только по крену и тангажу, но и по курсу.
В 1920 г. был сконструирован автопилот с гироскопическим чувствительным элементом крена и тангажа-прототипом современных авиагоризонтов и гировертикалей, а также с курсовым гироскопом-прототипом гирополукомпаса. Первый отечественный автопилот АВП-1 был разработан в 1932 г. Принципиальным был переход от пневматических рулевых машин к электрическим и электрогидравлическим.
Последующее развитие, автопилотостроения привело к созданию прототипа всех современных отечественных автопилотов и систем автоматического управления-автопилота АП-5. Этот автопилот устанавливался на
самолеты Ил-12, Ил-14, Ил-18, Ту-104, Ту-124. Затем на смену АП-5 пришел
АП-6. На Ту-114 устанавливался АП-15. До настоящего времени около 40
лет эксплуатируется на самолете Ан-24 автопилот АП-28, На самолете
Як-40 установлен АП-40. Автоматизация управления вертолетами осуществляется автопилотом АП-34 и его модификациями.
На ранних этапах развития авиационной техники вождение самолетов
по заданной траектории осуществлялось простейшими визуальными методами навигации путем наблюдения за наземными ориентирами. Развитие
инструментальных методов навигации позволило осуществить автоматическое управление полетом самолетов в крейсерском полете по маршруту.
4
Повышение требований по безопасности и регулярности полетов потребовало автоматизации процессов пилотирования на таких сложных участках
полета, как заход на посадку, посадка и взлет. Это привело к созданию
сложных, многофункциональных и многорежимных систем автоматического управления полетом.
На самолетах Ил-18 и Ту-134 были установлены бортовые системы
управления заходом на посадку БСУ-ЗП. Самолет Ил-62 управляется
с помощью САУ-1Т-62. На самолете Ту-154 автоматическое управление
полетом обеспечивается АБСУ-154, прошедшей целый ряд модификаций.
На смену БСУ-ЗП на самолете Ту-134 пришла АБСУ-134. Дальнейшее
развитие системы САУ-1Т позволило установить ее на самолет Ил-86
в соответствующей модификации. Автоматическое управление самолетом
Як-42 осуществляется с помощью САУ-42.
Новый этап развития САУ характеризуется ужесточением требований
к их точности и надежности, переходом на цифровую схемотехнику
вычислителей, дальнейшим углублением комплексирования, стандартизации. Это реализуется в базовом комплексе стандартного цифрового
пилотажно-навигационного оборудования самолетов Ил-96, Ил-И 4,
Ту-204, Ту-334. Составными элементами комплекса являются цифровые
САУ.
За 80 лет развития автоматические средства управления полетом самолетов прошли путь от простейшего пневматического автопилота до сложнейшей цифровой САУ. Научно-технические проблемы автоматического
управления полетом самолетов всегда были и остаются поныне кардинальными проблемами развития авиации.
РАЗДЕЛ I
САМОЛЕТ КАК ОБЪЕКТ УПРАВЛЕНИЯ
Глава 1
ОСНОВНЫЕ ПОЛОЖЕНИЯ ДИНАМИКИ
УПРАВЛЕНИЯ САМОЛЕТОМ
1.1. ЭЛЕМЕНТЫ КОНСТРУКЦИИ И ОРГАНЫ УПРАВЛЕНИЯ
САМОЛЕТОМ
Самолет-сложный объект управления (рис. 1.1). Основным элементом
конструкции является планер, состоящий из фюзеляжа, крыла и оперения.
Фюзеляж 77-основная несущая конструкция планера. Он служит для
Соединения в одно целое всех его частей, а также для размещения экипажа,
пассажиров, оборудования и грузов. Фюзеляж современного самолета
представляет собой вытянутое по потоку тело вращения с тупым закругленным носом и заостренной хвостовой частью. Для обеспечения наименьшего
сопротивления фюзеляжу придают плавные формы контура.
Крыло 1 - основная несущая поверхность самолета. Оно предназначено
для сбздания силы, удерживающей самолет в воздухе. Важными характеристиками крыла являются его стреловидность, форма сечения и площадь. Крыло обычно имеет плоскость симметрии, совпадающую с плоскостью симметрии самолета.
Оперение представляет собой несущие поверхности, обеспечивающие
устойчивость самолета в воздухе. Различают горизонтальное и вертикальное оперение.
Основным элементом горизонтального оперения является стабилизатор
11, который на современных пассажирских самолетах выполняется, как
правило, подвижным. Стабилизатор обеспечивает балансировку сил, действующих на самолет в полете. По месту расположения горизонтальное
оперение бывает низкорасположенным и высокорасположенным. На
рис. 1.1 показано низщрасположенное горизонтальное оперение. Основ•Л
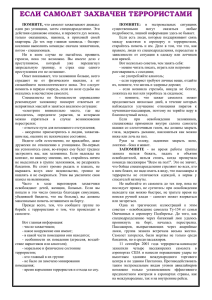
Рис. 1.1. Схема самолета Ил-96:
./-крыло; 2-предкрылок; 3-вертикальная
законцовка; 4— внешний элерон; 5-интерцептор; б-внешняя секция закрылка; 7—
средняя секция закрылка; 8- внутренний элерон; 9-тормозной щиток; 10— внутренняя
секция закрылка; 11- стабилизатор; 12внешняя секция руля высоты; 13-внутреняя
секция руля высоты; 14- киль; 15— верхняя
секция руля направления; 16- нижняя секция
руля направления; 17-фюзеляж; 18-мотогондола с двигателем; 19- пилон
ным элементом вертикального оперения является киль 14, обеспечивающий
путевую устойчивость самолета в воздухе.
Крыло современного самолета снабжено сложной механизацией, изменяющей его характеристики. По выполняемым функциям средства
механизации подразделяют на средства, изменяющие несущую способность
крыла, и средства, увеличивающие лобовое сопротивление. По месту
расположения на крыле различают средства механизации передней и
хвостовой кромок крыла.
Закрылок-профилированная подвижная часть крыла, расположенная
в его хвостовой части. Закрылок выполняется в виде внутренней 10, средней
7 и внешней 6 секций. Отклонение закрылка вниз увеличивает несущую
способность крыла. Предкрылок 2-профилированная подвижная часть
крыла, расположенная в его носовой части. Предкрылок также выполнен
секционным. Он улучшает характеристики крыла.
Интерцептор 5-подвижный орган, расположенный на верхней поверхности крыла. Интерцепторы выполняют секционными. Они используются
для изменения несущей способности крыла и для управления самолетом.
Тормозной щиток 9-подвижный орган, расположенный на верхней поверхности крыла и предназначенный для увеличения лобового сопротивления
самолета. Тормозной щиток выполняется секционным. Вертикальные
законцовки 3 служат для улучшения устойчивости самолета. К нижней
кромке крыла крепятся пилоны 19 и мотогондолы с двигателями 18.
Основными органами управления самолета являются рули высоты,
рули направления и элероны. Рули высоты-подвижная часть стабилизатора, расположенная в его хвостовой части. Они выполнены в виде внешней
12 и внутренней 13 секций. Рули направления-подвижная часть киля,
расположенная в его хвостовой части. Они выполнены в виде верхней 15
и нижней 16 секций. Элероны-подвижная часть крыла, расположенная
в его хвостовой части. Различают элероны внешние 4 и внутренние 8.
Причем управление ими может быть раздельным.
1.2. ПАРАМЕТРЫ ПОЛОЖЕНИЯ И ДВИЖЕНИЯ САМОЛЕТА
Параметры положения самолета. Для количественного описания положения и движения самолета в пространстве используют большое разнообразие систем координат: инерциальные, земные и подвижные. Выбор той или
иной системы координат обычно обусловлен решаемой задачей.
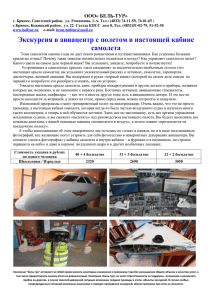
Рассмотрим нормальную земную систему координат О0Х8У828 (рис. 1.2).
Ее начало О0 лежит на поверхности земли и оси фиксированы по отношению к ней. Ось О0У8 направлена вверх по местной вертикали, т.е. по
прямой, совпадающей с направлением силы тяжести. Оси О0У8 и О028
лежат в местной горизонтальной плоскости, образуя правую прямоугольную декартову систему координат. Направление осей О0Х8 и О028
выбирается в соответствии с задачей. Например, ось О0Х8 направляется по
касательной к географическому меридиану 3, с юга на север, а ось О028 - по
касательной к географической параллели 4 с запада на восток. Пара7
метрами положения начала нормальной земной системы координат О0
являются географические широта ф и долгота К, отсчитываемые от
плоскости экватора / и гринвичского меридиана 2.
Поступательное движение самолета, как твердого тела, в пространстве
есть движение его центра масс относительно Земли.
Для описания параметров положения самолета используют подвижные
системы координат, начало которых О помещено в центре масс самолета,
а направление осей выбирается в соответствии с задачей.
Рассмотрим нормальную систему координат ОХД^ (см. рис. 1.2). Ее
начало О лежит в центре масс самолета. Вертикальная ось ОУВ направлена
по продолжению радиуса-вектора г, определяющего местную вертикаль.
Основная плоскость ОХВ2В является местной горизонтальной плоскостью
5, которая проходит через точку О перпендикулярно оси ОУВ. Оси ОХВ
и О2В параллельны осям О0ХВ и О02В нормальной земной системы
координат. Параметром положения начала нормальной системы координат О относительно нормальной земной системы координат является
высота Н.
Таким образом, пространственное положение самолета в поступательном движении относительно Земли полностью описывается тремя параметрами: широтой ф, долготой X и высотой Н. При исследовании динамики
движения самолета пользоваться параметрами ф и Я. не очень удобно.
Поэтому их часто заменяют пройденным самолетом расстоянием Ь вдоль
оси ОХВ и боковым отклонением г вдоль оси О28.
Самолет совершает относительно земли, помимо поступательного,
также вращательное движение, представляющее собой движение вокруг его
центра масс.
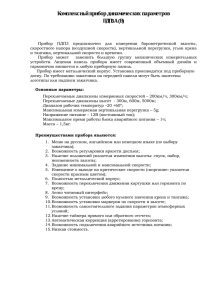
Рассмотрим связанную систему координат ОХУ2 (рис. 1.3). Ее начало О
лежит в центре масс, а оси ориентированы относительно осей самолета. Продольная ось ОХ расположена в плоскости симметрии самолета и направлена от
хвостовой части к носовой. Поперечная
ось О2 перпендикулярна плоскости симметрии самолета и направлена по правому полукрылу. Нормальная ось ОУ
расположена в плоскости симметрии самолета и направлена вверх. Связанная
система жестко фиксирована по отношению к самолету. Ее положение относительно нормальной системы определяет
параметры пространственного положеРис. 1.2. Нормальная земная и ния самолета во вращательном движенормальная системы координат:
нии относительно Земли: эйлеровы углы
1 -плоскость экватора; 2-гринвичский
меридиан; 3- географический меридиан;
4-географическая параллель; 5- местная
горизонтальная плоскость
рЫСКаНИЯ
(пас
1 д\
ФИ1" !•«»/.
'
V)/,
тангажа
О
И
Крена
у
Угол рыскания VI/ - это угол между
осью ОХВ нормальной системы координат и проекцией продольной оси
ОХ на горизонтальную плоскость
ОХВ28 нормальной системы координат. Угол рыскания положительный,
если ось ОХВ совмещается с проекцией продольной оси на горизонтальную плоскость поворотом вокруг оси
ОУВ по часовой стрелке, если смотреть в направлении этой оси.
Угол тангажа и-это угол между Рис. 1.3. Связанная система координат
продольной осью ОХ и горизонтальной плоскостью ОХВ2В нормальной
системы координат. Его следует считать положительным, если продольная
ось находится выше горизонтальной плоскости ОХВ2В.
Угол крена у-это угол между поперечной осью О2 и осью О28
нормальной системы координат, смещенной в положение, при котором
угол рыскания равен нулю. Угол крена положителен, если смещенная ось
О2В совмещается с поперечной осью поворотом вокруг продольной оси по
часовой стрелке, если смотреть в направлении этой оси.
Таким образом, пространственное положение самолета относительно
Земли полностью описывается шестью параметрами: пройденным расстоянием Ь, боковым отклонением 2, высотой Н, углами рыскания \|/, тангажа о,
и крена у.
Параметры движения самолета. Движение самолета можно рассматривать относительно Земли со скоростью V ж и относительно воздушной среды
со скоростью V .
Земная скорость УЖ-скорость начала О связанной системы координат
относительно какой-либо из земных систем координат, например нормальной земной ОдХзУ^. Вектор земной скорости V, складывается из трех
составляющих относительно связанных осей: У кх , У к у , У и . Проекция
земной скорости у к на горизонтальную плоскость ОХВ2В нормальной
системы координат называется путевой скоростью у п .
Скорость самолета \ -скорость начала связанной системы координат
относительно среды, не возмущенной самолетом. Модуль скорости самолета V называется воздушной скоростью V. Для рассмотрения взаимодействия между самолетом и воздушной средой необходимо задать
соответствующую систему координат.
Рассмотрим скоростную систему координат ОХаУа2а (рис. 1.5). Ее
начало О лежит в центре масс самолета, а основное направление определяется вектором скорости самолета V, вдоль которого направлена
скоростная ось ОХа. Плоскость 2, содержащая воздушную скорость V,
нормальна к плоскости симметрии самолета. Ось подъемной силы ОУа
находится в плоскости симметрии самолета 1 и направлена вверх. Боковая
ось О2а направлена в сторону правого полукрыла. Положение скоростной
системы координат относительно связанной системы координат определяет
параметры движения самолета относительно воздушной среды: угол атаки
а и угол скольжения р.
Угол атаки а-угол между продольной осью ОХ и проекцией скорости
самолета V на плоскость ОХУ связанной системы координат. Угол атаки
считается положительным, если проекция скорости самолета на нормальную ось отрицательна.
Угол скольжения (3 - угол между направлением скорости самолета V и
плоскостью ОХУ связанной системы координат. Угол скольжения считается положительным, если проекция скорости самолета на нормальную ось
отрицательна.
Для полного описания параметров движения самолета относительно
воздушной среды необходим еще один параметр, который определяется из
взаимного расположения скоростной и нормальной систем координат
(рис. 1.6).
Скоростной угол крена у а -угол между боковой осью О2а и осью О28
нормальной системы координат, смещенной в положение, при котором эти
оси находятся в одной плоскости. Скоростной угол крена положителен,
если смещенная ось О28 совмещается с боковой осью по часовой стрелке,
если смотреть в направлении этой оси.
Таким образом, движение самолета относительно воздушной среды
полностью определяется тремя параметрами: углом атаки а, углом скольжения Р и скоростным углом крена у а . Для рассмотрения параметров
поступательного движения самолета относительно Земли необходимо
задать соответствующую систему координат.
Рис. 1.4. Взаимное расположение
связанной и нормальной систем
координат:
/-местная горизонтальная плоскость;
2- плоскость симметрии самолета; 3—
вертикальная плоскость, содержащая ось
ОХ; 4-вертикальная плоскость, содержащая ось О2
10
Рис. 1.5. Взаимное расположение
связанной и скоростной систем
координат:
-/-плоскость симметрии самолета; 2плоскость, содержащая воздушную скорость и нормальная к плоскости симметрии самолета; 3^ проекция плоскости
симметрии самолета на плоскость, содержащую воздушную скорость
Рис. 1.6. Взаимное расположение скоростной и нормальной систем коорди-
Рис. 1.7. Взаимное расположение нормальной и траекторией систем координат:
1- местная горизонтальная плоскость; 2вертикальная плоскость, содержащая воздушную скорость
/- местная горизонтальная плоскость; 2вертикальная плоскость, содержащая вектор
земной скорости
Рассмотрим траекторную систему координат ОХД.Х, (рис. 1.7). Ее
начало О лежит в центре масс самолета, а основное направление определяется вектором земной скорости У К , вдоль которого направлена
траекторная ось ОХК. Вертикальная плоскость 2, содержащая вектор
земной скорости У^, перпендикулярна местной горизонтальной плоскости
/. Ось ОУК лежит в вертикальной плоскости, проходящей через ось ОХК,
и направлена вверх от поверхности Земли. Ось О2К образует правую
систему координат. Положение траекторией системы координат по отношению к нормальной системе определяет параметры поступательного движения самолета относительно Земли: угол пути Ч* и угол наклона траектории 0.
Угол пути Ч*-угол между осью ОХ8 нормальной системы координат
и направлением путевой скорости V п . Угол пути считается положительным,
если ось ОХВ совмещается с направлением путевой скорости поворотом
вокруг оси ОУе по часовой стрелке, если смотреть в направлении этой оси.
Угол наклона траектории 6 - угол между направлением земной скорости
У К и горизонтальной плоскостью ОХ828 нормальной системы координат.
Угол наклона траектории положителен, если проекция земной скорости на
ось ОУК положительна.
_^
Совместно с вектором земной скорости у к углы пути Ч* и наклона
траектории Э определяют параметры поступательного движения самолета
относительно Земли. Вращательное движение самолета относительно
Земли определяется проекциями угловой скорости связанной системы
координат со" относительно нормальной системы: скоростью крена сок,
скоростью рыскания соу и скоростью тангажа сог.
Скорость крена сох- составляющая угловой скорости самолета со по оси
ОХ связанной системы координат.
11
Скорость рыскания <оу- составляющая угловой скорости самолета оГ по
оси ОУ связанной системы координат.
Скорость тангажа юг- составляющая угловой скорости самолета а> по
оси ОТ. связанной системы координат.
"Скорости ох,, о)у, сог считаются положительными при вращении самолета
вокруг соответствующей оси по часовой стрелке, если смотреть в направлении этой оси. Таким образом, вращательное движение самолета относительно Земли полностью определяется тремя параметрами: скоростями
крена ео,, рыскания юу и тангажа юг.
Пространственное движение самолета относительно^ Земли и воздушной
среды описывается девятью параметрами: а, р, уа, УЕ, Ч*, в, со,, ооу, юг.
Совместно с шестью параметрами пространственного положения Н, Ь, г, \|/,
и и у эти параметры составляют минимально необходимый набор для
описания полного пространственного положения и движения самолета.
1.3. ВИДЫ ДВИЖЕНИЙ
Для описания параметров положения и движения самолета используются два вида движения: поступательное движение центра масс самолета
относительно Земли и вращательное движение самолета вокруг его центра
масс. Для анализа динамики полета необходимо ввести понятия еще
нескольких видов движений. Основным видом движения самолета является
опорное.
Опорное движение - это движение по заданной траектории, представляющей собой пространственную линию, описываемую центром масс самолета
при движении относительно Земли с заданными параметрами положения
и движения. Опорное движение может быть невозмущенным и возмущенным.
Невозмущенное движение-это движение самолета при отсутствии
каких-либо возмущений: управляющих воздействий пилота или автоматики, воздействий окружающей среды, изменения состояния планера и
двигателей и т.д. Невозмущенное движение самолета-исходное. Вновь
образовавшееся под действием перечисленных возмущений движение
является возмущенным. В условиях возмущенного движения приближение
самолета к заданной траектории в опорном движении достигается за счет
естественной способности самолета сохранять параметры движения, а
также парированием отклонений самолета от опорного движения пилотом
или автоматикой.
Движение самолета после прекращения действия возмущения, нарушившего исходное невозмущенное движение, называется собственным возмущенным движением, или просто собственным движением. Такое движение
возникает, если находящемуся в равновесии самолету сообщить некоторое
начальное возмущение, а затем предоставить самому себе. Собственное
возмущенное движение наблюдается после воздействия резкого порыва
ветра, отклонения руля, сброса груза и т.д.
12
Движение самолета при наличии постоянно действующего возмущения
называется вынужденным возмущенным движением или просто вынужденным движением. Такое движение возникает, например, при длительном
отклонении руля, изменении конфигурации механизации крыла, постоянном воздействии ветра и т. д.
В полете на самолет действуют различные силы и моменты. Характер их действия определяет установившееся и неустановившееся движения.
Установившееся движение-это движение самолета в условиях равновесия действующих на него сил и сбалансированности моментов. В
установившемся движении основные кинематические параметры движения,
прежде всего скорость, постоянны или меняются достаточно медленно.
Если это условие выполняется приближенно, то движение называется
квазиустановившимся (почти установившимся). Неустановившееся движение-это движение самолета с достаточно быстрым изменением кинематических параметров, прежде всего скорости и высоты, в условиях отсутствия равновесия действующих на него сил и разбалансированности
моментов.
В качестве основных невозмущенных видов движения самолета принято
рассматривать горизонтальный полет, набор высоты и снижение.
Горизонтальный полет-полет самолета на постоянной высоте (6 = 0
и И = 0). Он может быть установившимся и неустановившимся, прямолинейным и криволинейным.
Установившийся горизонтальный по лет -полет самолета на постоянной
высоте и с постоянной скоростью (0 = 0, Н = О, V = 0).
Установившийся прямолинейный горизонтальный полет-полет на постоянной высоте и с постоянной скоростью без скольжения и крена (8 = О,
Н = О, V = 0, р = 0, у = 0, у = П
Этап полета, целью которого является изменение параметров движения
называется маневром. Криволинейный горизонтальный полет-полет на
постоянной высоте с поворотом траектории в горизонтальной плоскости
(6 = О, Н = 0, у / 0).
Криволинейный горизонтальный полет с поворотом траектории на 360°
называется виражом. Если угол поворота траектории меньше 360°, то
такой маневр называют разворотом. Вираж и разворот могут выполняться
с креном и скольжением. Установившийся криволинейный горизонтальный
полет с постоянным креном без скольжения и с постоянной скоростью
называется правильным виражом или разворотом (9 = О, Н = 0, \|/ ф О,
у = соп81, р = О, V = 0).
Набор высоты и снижение - полет по наклонной траектории соответственно с увеличением или потерей высоты (в ф О, И = 0). Набор высоты
и снижение, так же как и горизонтальный полет, могут быть установившимися и неустановившимися, прямолинейными и криволинейными.
Установившиеся набор высоты и снижение-полет с постоянными воздушной и вертикальной скоростями (8 ф О, V = 0 и И = 0). Криволинейный набор
высоты и снижение-полет с поворотом траектории в вертикальной плоскости (0 Ф 0 и Н + 0).
13
Установившиеся прямолинейные набор высоты и снижение-полет с
постоянными воздушной, вертикальной скоростями и углом наклона
траектории (6 = сопз1, V = 0 и Н = 0).
1.4. СИЛЫ И ПЕРЕГРУЗКИ
Силы, действующие на самолет при отсутствии управляющих воздействий
и внешних возмущений. Движение самолета в полете происходит под
действием тяги двигателей Р, аэродинамической силы планера КА и
гравитационной силы тяжести С.
Тяга Р-главный вектор системы сил, действующих на самолет со
стороны двигателя в результате его функционирования. Точка ее приложения-центр тяги (ЦТ) определяется положением двигателей на
самолете.
Аэродинамическая сила планера К д (аэродинамическая сила)-главный
вектор системы сил, действующих на самолет со стороны окружающей
среды при его движении. Эта сила приложена в центре давления (ЦД),
положение которого изменяется в зависимости от углов атаки и скольжения, скорости, конфигурации самолета.
Сила тяжести б-равнодействующая сила тяжести каждого элемента
массы самолета. Точка ее приложения-центр масс (ЦМ) самолета, а
направление-по вектору ускорения свободного падения вниз.
Аэродинамическая сила обычно определяется при продувках самолета
в аэродинамической трубе и задается проекциями на оси скоростной
системы координат: силой лобового сопротивления Ха (берется с противоположным знаком), аэродинамической подъемной силой Уа и аэродинамической боковой силой 2а. При исследовании динамики движения самолета
пользуются также проекциями аэродинамической силы Ка на оси связанной
системы координат: аэродинамической продольной силой X (взятой с
противоположным знаком), аэродинамической нормальной силой У и аэродинамической поперечной силой X.
Главный вектор сил, действующих на самолет без учета гравитационных и инерционных сил, представляет собой результирующую силу К,
Рис. 1.8. Схема сил, действующих на самолет в горизонтальном полете без крена
в вертикальной плоскости
14
Рис. 1.9. Схема сил, действующих на самолет в горизонтальном полете без крена
в горизонтальной плоскости
которая определяется проекциями на оси скоростной системы координат:
тангенциальной силой К х , подъемной силой К.у и боковой силой К г . Кроме
того, результирующая сила может задаваться"и проекциями на оси связанной системы координат: продольной силой К к , нормальной силой Ку и
поперечной силой К г . Результирующая сила К является векторной суммой
тяги Р* и аэродинамической силы Ка (рис. 1.8 и 1.9):
1 = Р* + К а .
(1.1)
Проекции тяги Р*, аэродинамической силы К а и результирующей силы
К обычно выражают через безразмерные коэффициенты, скоростной напор
Я и площадь крыла самолета 5. Тяга
Р = с р я8,
(1.2)
где ср- коэффициент тяги.
Проекции аэродинамической силы:
Ха = с х я З ; Уа = с я8; 2а = с г я 8 ,
(1.3)
сг -соответственно коэффициенты лобового сопротивления, аэродинамической подъемной и аэродинамической боковой сил.
Проекции результирующей силы:
где сх , су
(1.4)
где сх, су, с2-соответственно коэффициенты аэродинамических продольной,
нормальной и поперечной сил.
Скоростной напор я определяется плотностью воздуха р и воздушной
скоростью V:
Я = рУ 2 /2.
(1.5)
Рассмотрим структуру составляющих аэродинамических сил. При
отсутствии управляющих воздействий и внешних возмущений аэроди15
а.=5°
0,5
-1
0,6
А
Рис. 1.10. Типовая зависимость коэффициента аэродинамической подъемной силы от угла атаки
0,7
0,5
М
Рис. 1.11. Типовая зависимость коэффициента аэродинамической подземной силы от числа М
намическая подъемная сила Уа в основном определяется двумя составляющими:
У а = Уаа + У а М ,
(1-6)
где У аЯ - аэродинамическая подъемная сила по углу атаки; У аМ- аэродинамическая
подъемная сила по числу М (отношению скорости полета к скорости звука).
Аэродинамическая подъемная сила по углу атаки Уаа возникает
вследствие наличия угла атаки и связанным с этим несимметричным
обтеканием самолета воздушным потоком. Эта сила создается в основном
крылом, а также фюзеляжем и горизонтальным оперением. Возникновение
аэродинамической подъемной силы крыла при наличии угла атаки обусловлено неравномерным распределением давления набегающего воздушного
потока на нижней и верхней поверхностях крыла, причем с увеличением
угла атаки разрежение на верхней поверхности увеличивается, а на нижней
уменьшается.
Аэродинамическая подъемная сила УаМ обусловлена проявлением
сжимаемости воздуха. Она также создается в основном крылом. С учетом
рассмотренной структуры составляющих аэродинамическая подъемная
сила может быть определена следующим образом:
Уа(а, М, р, У) = су (а, М) 3
^у
V"'
~-~/
~
(1.7)
л
су (а, М) = с а + су м ,
где су „, су м - составляющие коэффициента аэродинамической подъемной силы су ,
обусловленные соответственно углом атаки а и числом М.
Зависимость су (а, М) в эксплуатационной области режимов является
почти линейной и выражается через соответствующие частные производные
1
Су- и Су* . Тогда
м
Уа(а, М, р, V) = [с« а + с М] 5
•'к
16
•* ч
Р
У
2
(1.8)
Типовая зависимость коэффициента аэродинамической подъемной силы
от угла атаки (рис. 1.10) практически линейна и может быть представлена
функцией Да = а — а 0 . На больших углах атаки зависимость теряет линейность. Это происходит в связи с возникновением на крыле местных срывов
воздушного потока, что вызывает вибрацию и тряску самолета. Дальнейшее увеличение угла атаки вызывает уменьшение темпа роста коэффициента аэродинамической подъемной силы, а при критическом угле атаки
а кр самолет начинает «сваливаться». Типовая зависимость коэффициента
аэродинамической подъемной силы от числа М (рис. 1.11) линейна вплоть
до М = 0,8 н- 0,85.
Сила лобового сопротивления Ха определяется двумя составляющими:
(1.9)
— Х аа + Ха
где Хаа-сила лобового сопротивления по углу атаки а; ХаМ-сила лобового
сопротивления по числу М.
Сила лобового сопротивления по углу атаки Ха„ обусловлена тем, что
при увеличении угла атаки перераспределяется давление на крыле, изменяется эпюра скоростей в пограничном слое, что приводит к изменению
сопротивлений трения и давления. Сила лобового сопротивления Х аМ
обусловлена проявлением сжимаемости воздуха. Обе составляющие силы
лобового сопротивления создаются в основном крыле. Выражение (1.9)
с учетом (1.5) может быть записано следующим образом:
(1.10)
Ха(а, М, р, У) = с. (а, М) 3
где сх а, сх м-составляющие коэффициенты лобового сопротивления сх , обусловленные соответственно углом атаки а и числом М.
0,8
М
Рис. 1.12. Типовая зависимость коэффи- Рис.ЛЛЗ. Типовая зависимость коэфциента лобового сопротивления -йт угла- ' .фициента лобового сопротивления от
атаки
*
- --'
.««™ **
17
0,2
0,5
-20
О
0,№
0,08
0,12
0,16
10
О
-10
СХа
Рис. 1.14. Поляра самолета
-0,2
Рис. 1.15. Типовая зависимость коэффициента аэродинамической поперечной силы от угла скольжения
Зависимость сх (а, М) в эксплуатационной области режимов почти
м
линейна и выражается через частные производные с? и с . Тогда
а
Ха(а, М, р, У) =
м
с М]5
рУ2
а
(1.11)
Типовая зависимость коэффициента лобового сопротивления от угла
атаки (рис. 1.12) с возрастанием угла атаки становится параболической.
Аналогична зависимость коэффициента лобового сопротивления от числа
М (рис. 1.13). Зависимость между коэффициентами аэродинамической
подъемной силы су и лобового сопротивления сх при различных углах
атаки называется полярой. При изменении числа М "меняются коэффициенты аэродинамических сил ск и су , поэтому каждому числу М полета
соответствует своя поляра (рис. 1.И).
Аэродинамическая боковая сила 2а определяется в основном углом
скольжения Р, т.е. 2а = 2 а р. Это обусловлено несимметричным обтеканием
самолета набегающим воздушным потоком и отклонением аэродинамической силы планера -КА от плоскости симметрии самолета. Основную
долю аэродинамической боковой силы создают фюзеляж и вертикальное
оперение. При малых углах скольжения аэродинамические боковая и
поперечная силы почти равны (2р = 2 = 2а = 2ар). Тогда
2
2
рУ
рУ
2(Р, р, У) = с2(р)8Л-—= С2РРЗ^-—,
(1.12)
где сЦ- частная производная коэффициента аэродинамической поперечной силы по
углу скольжения.
Направление (знак) аэродинамической поперечной силы зависит от
знака угла скольжения. При скольжении на правое полукрыло угол
скольжения Р положителен, а коэффициент сг и сила 2 отрицательны
(рис. 1.15).
18
Тяга самолета наиболее существенно зависит от числа М, давления рн
и температуры воздуха Тн на высоте Н. Поэтому выражение (1.2) можно
записать следующим образом:
Р(М, Рн, Т„, р, У) = Ср(М, рн, Т н )§^.
(1.13)
Перегрузки. При исследовании многих^ задач динамики управления
полетом используется понятие перегрузки п.
Перегрузка- отношение результирующей силы К к произведению массы
самолета т на ускорение свободного падения §:
К
Р + К,
п = — = - ±.
т§
те
(1.14)
Проецируя вектор перегрузки п на оси связанной системы координат,
получают составляющие перегрузки: продольную пх, нормальную пу и
поперечную п2 перегрузки:
пх = ^;п уу = ^; п2 = ^.
те
те
т§
(1.15)
Проецируя вектор перегрузки п на оси скоростной системы координат,
получают составляющие перегрузки: тангенциальную пх , нормальную
скоростную пу и боковую п2 перегрузки:
т§
; „ а2 = а .
те
(1.16)
1.5. МОМЕНТЫ СИЛ
Моменты сил, действующие на самолет при отсутствии управляющих
воздействий и внешних возмущений. Аэродинамическая сила К А и тяга
Р приложены не в центре масс самолета, поэтому они создают относительно самолета соответствующие аэродинамический момент М и момент
тяги МР (рис. 1.16).
Аэродинамический момент М является главным моментом аэродинамической силы К А относительно центра масс. Он определяется проекциями на
оси связанной системы координат: аэродинамическими моментами крена
М х , рыскания Му и тангажа М 2 . Момент тяги МР- главный момент сил,
составляющих тягу Р, относительно центра масс.
Главный момент системы сил, образующих результирующую силу,
относительно
центра
масс
представляет
собой
результирующий
момент М к , который определяется проекциями на оси связанной системы
координат: моментами крена Мк , рыскания Мк и тангажа Мк . Результирующий^ момент Мк является* векторной суммой аэродинамического
момента М и момента тяги МР:
МК=М+МР.
(1.17)
19
Рис. 1.16. Схема моментов
сил, действующих на самолет
в полете при отсутствии управляющих воздействий и
внешних возмущений
Моменты сил, действующие на самолет в полете, обычно выражают
через скоростной напор ц, площадь крыла 8, размах крыла 1, среднюю
аэродинамическую хорду крыла Ьа и безразмерные коэффициенты:
(1.18)
где т,, ту, т г - соответственно коэффициенты аэродинамических моментов крена,
рыскания и тангажа.
Аналогичным образом для проекций результирующего момента:
(1.19)
где т„ , т„ , тк соответственно коэффициенты моментов крена, рыскания и
тангажа.
Момент тяги также рассматривают в проекциях на соответствующие
оси:
= Ру2Р + Р г у р ;
Р г х р ; М = Р х у р + Р у х р , (1.20)
где Рх, Р у , Рг-проекции тяги Р* на связанные оси; хр, у р , гр-плечи тяги Р*.
На практике существенную роль играет только момент тангажа тяги
МР , а моменты крена и рыскания тяги обычно принимают равными нулю
(Мр = О, МР = 0). Поэтому для моментов крена и рыскания Мк = Мх
и мк = М у . При верхнем относительно центра масс самолета расположении равнодействующей тяги создается пикирующий момент, при нижнем кабрирующий.
За положительное направление действия моментов принимается их
действие, происходящее по направлению часовой стрелки, если смотреть по
соответствующей оси от центра масс самолета.
Рассмотрим структуру составляющих аэродинамических моментов. При
отсутствии управляющих воздействий и внешних возмущений аэродинамический момент крена
М х = М хр + М ха + Мхшх + М8Юу ,
(1.21)
где М ж р- статический момент крена по углу скольжения; Мх„- статический момент
крена по углу атаки; М хШ -динамический демпфирующий момент крена по скорости
крена; МхМ -динамический спиральный момент крена по скорости рыскания.
20
Статический момент крена М х р возникает вследствие наличия угла
скольжения и связанного с этим несимметричного обтекания самолета
воздушным потоком. Он создается в основном крылом и вертикальным
оперением. Появление момента М х р обусловлено несимметричным распределением аэродинамической нагрузки по размаху крыла. На выдвинутом
вперед полукрыле подъемная сила увеличивается, а на отстающем уменьшается. Поэтому момент М х р направлен в сторону отстающего пр^и
скольжении полукрыла. В горизонтальном полете момент М х р является
основным действующим моментом относительно оси ОХ и существенно
преобладает над моментом М ха , который возникает вследствие наличия
угла атаки и связанного с этим несимметричным обтеканием самолета
воздушным потоком при вертикальном маневре самолета.
Динамический демпфирующий момект крена МхШ возникает вследствие
наличия угловой скорости вращения самолета относительно оси ОХ. Этот
момент создается в основном крылом, а также вертикальным и горизонтальным оперением. Появление момента МхИ обусловлено увеличением
углов атаки на опускающемся полукрыле и уменьшением их на поднимающемся полукрыле, что приводит к соответствующему увеличению и уменьшению подъемных сил. Поэтому момент МхШ> направлен против угловой
скорости вращения <ах и против статического момента М х р.
Динамический спиральный момент крена МхЩ образуется при вращении
самолета вокруг оси ОУ. Он создается в основном крылом и вертикальным
оперением. Момент Мх(0 обусловлен тем, что скорость воздушного потока,
набегающего на идущее вперед полукрыло, будет больше, а на идущее
назад полукрыло-меньше скорости полета V. Поэтому на идущем вперед
полукрыле подъемная сила увеличивается и оно поднимается, а на идущем
назад полукрыле уменьшается и оно опускается. Момент Мхш направлен
по угловой скорости вращения <иу.
С учетом рассмотренной структуры составляющих момент крена
2
рУ
М Ж (Р, а, ю х , соу, р, V) = тх(р, а, <вж, <ву) 81 ^-;
(1.22)
тх(Р, а, <вх, а>у) = тх(5 + тха + тха>х + тХШ;,
где т х р, тха, тхю^, тхш -составляющие коэффициента аэродинамического момента
крена тл, обусловленные соответственно углом скольжения Р, углом атаки а,
скоростью крена шх и скоростью рыскания ш у .
Зависимость тх(р, а, сох, ш у ) в эксплуатационной области режимов
является линейной и выражается через соответствующие частные производВ
а
о)
а> г~
ные тх, тх, тх , ту'. Тогда
МХ(Р, а, <вх, соу, р, V) = [т^Р + т х а + тх'сох +
+ т>у]51^.
(1.23)
Типовая зависимость коэффициента аэродинамического момента крена
т х от угла скольжения р (рис. 1.17) линейна в пределах Р = ± 15°.
21
Аэродинамический момент рыскания
му = мУР
Муа
МУ
(1.24)
где Мур-статический момент рыскания по углу скольжения; Муа-статический
момент рыскания по углу атаки; Муш -динамический демпфирующий момент
рыскания по скорости рыскания; Муо) -динамический спиральный момент рыскания
по скорости крена.
Статический момент рыскания Мур образуется вследствие появления
аэродинамической поперечной силы 2 при скольжении. Основную долю
этой силы создают фюзеляж и вертикальное оперение. Возникновение
аэродинамической поперечной силы 2 при_ скольжении обусловлено
отклонением аэродинамической силы планера К.А от плоскости симметрии
самолета из-за несимметричного обтекания и появлением ее проекции на
ось О2. В горизонтальном полете момент Мур-основной действующий
момент относительно оси ОУ. Он значительно превышает момент Муо,
который возникает вследствие наличия утла атаки и связанного с этим
несимметричным обтеканием самолета воздушным потоком при вертикальном маневре самолета.
Динамический демпфирующий момент рыскания Му(В возникает
вследствие вращения самолета относительно оси ОУ с угловой скоростью
соу. Он создается в основном фюзеляжем, а также вертикальным оперением
и крылом. Действие момента Му(0 обусловлено двумя равнодействующими
аэродинамическими поперечными силами носовой и хвостовой частей
фюзеляжа, направленными встречно по отношению к возникшей угловой
скорости юу и возникающими из-за сопротивления воздуха вращению
самолета. Одновременно на вертикальном оперении появляется дополнительный угол скольжения, вызывающий аэродинамическую поперечную
силу, также направленную встречно к
соу. Демпфирующий момент полукрыльев
обусловлен увеличением аэродинамической силы лобового сопротивления на
обтекаемом с большей скоростью полукрыле и уменьшением лобового сопротивления на противоположном полукрыле.
Динамический спиральный момент
рыскания Муш образуется при вращении
самолета вокруг оси ОХ. Он создается
в основном крылом и вертикальным
оперением. При вращении самолета вокруг оси ОХ на опускающемся и поднимающемся полукрыльях возникают приращения угла атаки. Это приводит не
Рис. 1.17. Типовые зависимости
только к изменению подъемных сил, но
коэффициентов аэродинамических
и к соответствующему приращению сил
моментов крена и рыскания от угла
скольжения
лобового сопротивления, которые и соз22
дают момент рыскания, направленный по угловой скорости вращения сох.
С учетом рассмотренной структуры составляющих момент рыскания
2
рУ
М У (Р, а, ю у , юх, р, V) = ту(р, а, соу, ю х ) 81 —;
п 25)
т у (р, а, соу, ю х , р, V) = ту|! + туа + ту(0у + ту(Я^
где т у р, туа, т^ , туш -составляющие коэффициента аэродинамического момента
рыскания т у , обусловленные соответственно углом скольжения р, углом атаки а,
скоростью рыскания в*у и скоростью крена а>„.
'
Зависимость ту(Р, а, соу, ю х ) в эксплуатационной области режимов
линейна и выражается через соответствующие частные производные ту, т",
т?', т^. Тогда
М у (Р, а, ю у , юх, р, V) = [ту Р + ту а + т у 'ю у + т у "ю х ] —- . (1.26)
Типовая зависимость коэффициента аэродинамического момента рыскания ту от угла скольжения р (см. рис. 1.17) линейна в пределах Р = ± 15°'.
Аэродинамический момент тангажа
М2 = М20 + М2а + М2р + М2Щг + М 2й ,
(1.27)
М20-статический момент тангажа при нулевой подъемной силе; М2(1-статический
момент тангажа по углу атаки; М2р-статический момент тангажа по углу скольжения; М 2Шг _ статически й демпфирующий момент тангажа по скорости тангажа;
М 2Й - динамический момент тангажа, обусловленный запаздыванием скоса потока.
Статический момент тангажа при нулевой подъемной силе М20 создается силой лобового сопротивления относительно точки приложения
подъемной силы. Этот момент не зависит от угла атаки.
Статический момент тангажа М2И обусловлен углом атаки и связанной
с этим подъемной силой. Он создается в основном крылом. Возникает
момент М2а вследствие смещения относительно центра масс положения
центра давления, к которому приложена аэродинамическая сила планера
К А , при изменении угла атаки. В результате появляется плечо аэродинамической силы К А , а следовательно, и соответствующий момент.
В прямолинейном полете момент М2а-основной действующий момент
относительно оси О2. Он существенно преобладает над моментом М2^
который возникает вследствие наличия угла скольжения и связанного
с этим несимметричного обтекания самолета воздушным потоком при
горизонтальном маневре самолета.
Динамический демпфирующий момент тангажа М2Шг возникает вследствие вращения самолета вокруг оси О2. Он создается в основном
горизонтальным оперением, а также крылом и фюзеляжем. Изменение угла
атаки горизонтального оперения вызывает соответствующее приращение
подъемной силы горизонтального оперения. Эта подъемная сила на плече,
равном расстоянию от центра масс самолета до точки своего приложения,
создает момент тангажа, направленный против вращения самолета. Равнодействующие сил сопротивления воздуха вращению самолета относительно
23
т.
Рис..1.18. Типовые зависимости коэффициента аэродинамического момента
тангажа от угла атаки при различных
числах М
оси О2 в носовой и хвостовой частях фюзеляжа направлены также против
вращения самолета и образуют свою составляющую момента тангажа.
Крыло создает демпфирующий момент аналогично горизонтальному оперению.
Динамический момент М2й возникает вследствие того, что при
неустановившемся продольном движении самолета изменение угла атаки
во времени а вызывает соответствующее изменение скоса потока за
крылом. Скошенный воздушный поток достигает горизонтального оперения не мгновенно, а с некоторым запаздыванием по времени. Поэтому угол
скоса потока в области горизонтального оперения в каждый момент
времени определяется углом атаки, который имело крыло мгновением
ранее. Вследствие запаздывания скоса потока угол атаки горизонтального
оперения будет отличаться от угла атаки при установившемся движении.
Это является причиной появления дополнительной подъемной силы
горизонтального оперения и соответствующего момента М^, который
противодействует изменению угла атаки и направлен в ту же сторону, что
и момент М2Ш .
С учетом рассмотренной структуры составляющих момент тангажа Мг
может быть выражен следующим образом:
2
рУ
Мг(а, р, юг, а, р, V) = тг(а, Р, сог, а) 8Ьа ~ ,
(1.28)
тг(а, р, юг, а) = тг0 + т^ + тгр + т^ + т2й,
где тг0, тго, тгр, т^,, , тгй-составляющие коэффициента аэродинамического
момента тангажа тг, обусловленные соответственно силой лобового сопротивления
при нулевой подъемной силе, углом атаки а, углом скольжения р, скоростью тангажа
е>2 и скоростью угла атаки а.
Зависимость тг(а, Р, а>2, а) в эксплуатационной области режимов линейна и выражается через соответствующие частные производные т2, т2, т™',
т". Тогда
М2(а, р, о>2, а, р, V) = [тг0 + т"а + т*р + п^'
(1.29)
24
Типовая зависимость коэффициента аэродинамического момента тангажа т2 от угла атаки а (рис. 1.18) линейна в ограниченном диапазоне угла
а. Так как т2 зависит от сжимаемости воздуха (числа М), то в выражении
(1.28) также необходимо учесть эту зависимость.
1.6. УПРАВЛЯЮЩИЕ ВОЗДЕЙСТВИЯ И ВНЕШНИЕ ВОЗМУЩЕНИЯ
Управляющие воздействия. Существуют два основных способа аэродинамического управления движением самолета. Первый предусматривает
управление аэродинамическими моментами путем отклонения пилотом или
автоматикой моментных органов управления: элеронов, рулей направления
и высоты. Второй способ предусматривает управление аэродинамическими
силами путем отклонения пилотом или автоматикой органов управления
силами: тормозных щитков, интерцепторов, закрылков, подфюзеляжного
руля совместно с рулем направления и т. д. В первом способе управления
различают четыре основных управляющих воздействия: по аэродинамическому моменту крена 5Э, аэродинамическому моменту рыскания 5Я,
аэродинамическому моменту тангажа 5В и (р.
Управляющее воздействие по крену-угол отклонения элеронов 8Э для
создания аэродинамического момента крена (рис. 1.19). Угол отклонения
элеронов считается положительным при повороте правого элерона по
часовой стрелке, а левого против часовой стрелки, если смотреть в
направлении связанной оси О2.
Для создания положительного угла отклонения элеронов при ручном
управлении необходимо повернуть штурвал против часовой стрелки. Тогда
правый элерон пойдет вниз, а левый-вверх. Это приведет к увеличению
подъемной силы на полукрыле с отклоненным вниз элероном и уменьшению подъемной силы на полукрыле с отклоненным вверх элероном. Пара
сил АУ э создает управляющий аэродинамический момент крена на плече г э :
Мх8= = 2ДУ э г э = МН = п#я818э,
(1.30)
»А ^частная производная аэродинамического момента крена по отклонению
где М
х
элеронов; тхэ-коэффициент эффективности элеронов по крену.
Рис. 1.19. Управляющие воздействия по крену, рысканию
и тангажу
Производная тх' отрицательна и показывает, как изменяется коэффи- ч
циент аэродинамического момента крена тх при отклонении элеронов на 1 °
(рис. 1.20). При отклонении элеронов помимо аэродинамического момента
возникает также аэродинамический момент рыскания, создаваемый приращением лобового сопротивления АХЭ на плече г3:
Му8> = 2ДХ э 2 э = Му'8э = ту'ч515э,
(1.31)
где М '-частная производная аэродинамического момента рыскания по отклонению
элеронов; ту3-коэффициент эффективности элеронов по рысканию.
Производная ту" отрицательна и показывает, как изменяется коэффициент аэродинамического момента рыскания при отклонении элеронов
на Г.
Отклонение элеронов нарушает равновесие моментов относительно оси
ОХ, и самолет под действием момента Мх5 поворачивается вокруг этой
оси. Начинает меняться угол крена у, и "вектор аэродинамической силы У а ,
лежащий в продольной плоскости самолета, дает проекцию на горизонтальную плоскость У а 8ту. Эта проекция является центростремительной
силой, искривляющей траекторию полета.
Управляющее воздействие по рысканию-угол отклонения руля Направления 5Н для создания аэродинамического момента рыскания. Этот угол
считается положительным при повороте руля против часовой стрелки, если
смотреть в направлении связанной оси ОУ (см. рис. 1.19).
Для создания положительного угла отклонения руля направления при
ручном управлении необходимо правую педаль отклонить от себя, а
левую-на себя. Тогда руль направления пойдет вправо. Это приведет
к появлению поперечной силы 2Я, которая создаст управляющий аэродинамический момент рыскания М у6 на плече Ьн:
г
Му5в = 2Н Ьн = Му» 5Н = ту" Ч§15Н,
(1.32)
где Му" - частная производная аэродинамического момента рыскания по отклонению
руля направления; ту" - коэффициент эффективности руля направления по рысканию.
Производная ту" отрицательна и показывает, как изменяется коэффициент аэродинамического момента рыскания ту при отклонении руля
направления на 1° (рис. 1.21). При отклонении руля направления помимо
аэродинамического момента рыскания возникает также аэродинамический
момент крена, создаваемый поперечной силой 2Н на плече у н :
Мх6„ = 2„ун = М^"5„ = тх" я815н,
(1.33)
»А
где Мх" - частная производная аэродинамического момента крена по отклонению
н
руля направления; тх -коэффициент эффективности руля направления по крену.
Производная тх" отрицательна и показывает, как изменяется коэффициент аэродинамического момента крена тх при отклонении руля направления на 1°.
26
/77„
/77у
-0,0!-
-го
-ю
-0,01
10
-20
-10
Ю
--0,01
-0,02
-0,02
Рис. 1.20. Зависимость коэффициента аэродинамического момента
крена от отклонения элеронов
Рис. 1.21. Зависимость коэффициента
аэродинамического момента рыскания
от отклонения рулей направления
Отклонение рулей направления вызывает нарушение равновесия моментов относительно оси ОУ. Самолет поворачивается вокруг этой оси
и возникает угол скольжения Р, а вместе с ним и аэродинамическая боковая
сила 2а, которая является центростремительной силой, искривляющей
траекторию полета.
Так как центростремительная сила, возникающая при отклонении
элеронов, существенно больше центростремительной силы, возникающей
при отклонении эулей направления, управление траекторией в горизонтальной плоскости посредством элеронов является более предпочтительным, за
исключением тех случаев, когда диапазон допустимых углов крена самолета ограничен (взлет, посадка). Кроме того, полет со скольжением
вызывает дискомфорт экипажа и пассажиров. Поэтому управление в
горизонтальной плоскости обычно осуществляется без скольжения (координированно). Это достигается одновременным отклонением рулей направления и элеронов. Чтобы при этом не возникало потери высоты вследствие
уменьшения проекции аэродинамической силы на вертикальную плоскость,
необходимо одновременно отклонить рули высоты вверх.
Управляющее воздействие по тангажу-угол отклонения рулей высоты
5В для создания аэродинамического момента тангажа. Этот угол считается
положительным при повороте руля по часовой стрелке, если смотреть
в направлении связанной оси О2 (см. рис. 1.19).
Для создания положительного угла отклонения рулей высоты при
ручном управлении необходимо отклонить колонку штурвала от себя,
тогда рули высоты пойдут вниз. Это приведет к увеличению подъемной
силы на горизонтальном оперении АУ В , которая создаст управляющий
аэродинамический момент тангажа М28> на плече Ь г о :
ДУВ Ьг.0 =
"5 =
•Ч5Ь.6.,
(1.34)
27
где М*'-частная производная аэродинамического момента тангажа по отклонению
рулей высоты; т*"-коэффициент эффективности рулей высоты по тангажу.
Производная т^ отрицательна и показывает, как изменяется коэффициент аэродинамического момента тангажа тг при отклонении рулей
высоты на Г (рис. 1.22).
Управляющее балансировочное воздействие по тангажу-угол отклонения стабилизатора ср для создания аэродинамического момента тангажа.
Он положителен, если задняя кромка стабилизатора отклоняется вниз (см.
рис. 1.19).
Для создания положительного угла отклонения стабилизатора при
ручном управлении необходимо отжать гашетку управления стабилизатором от себя, тогда задняя кромка стабилизатора пойдет вниз. Это
приведет к увеличению подъемной силы на горизонтальном оперении АУ С ,
которая создаст управляющий балансировочный момент тангажа М^ на
плече Ьс:
М29 = АУ С Ьс = М29Ф = т? ЧЗЪаФ,
(1.35)
где М*-частная производная аэродинамического момента тангажа по отклонению
стабилизатора; т*-коэффициент эффективности стабилизатора по тангажу.
Производная т* отрицательна и показывает, как изменяется коэффициент аэродинамического момента тангажа тг при отклонении стабилизатора на Г. ,
Отклонение рулей высоты или стабилизатора вызывает нарушение
равновесия моментов относительно оси О2 и вследствие действия управляющих моментов М^ или Мгф самолет поворачивается вокруг этой оси.
При этом начинают меняться утлы тангажа о и атаки а. Изменение угла
атаки приводит к изменению аэродинамической подъемной силы У а .
Равновесие между подъемной силой и силой тяжести нарушается и под
действием центростремительной ситг
лы самолет искривляет траекторию
движения в вертикальной плоскости.
Таким образом, отклонения рулей
и стабилизатора создают управляю0,04
щие моменты благодаря сравнительно небольшим управляющим силам
на значительных плечах. Под дейст-го
-10 \О
Ю
К,
вием этих моментов самолет изменяет свое угловое положение, что при-0,01,
водит уже к изменению величины
аэродинамической силы за счет изменения углов атаки и скольжения, т. е.
-0,0в
управление аэродинамическими силаРис. 1.22. Зависимость коэффициенми осуществляется косвенно через
^
та аэродинамического момента
управление угловым положением
тангажа от отклонения рулей вы^
соты
(ориентацией) самолета.
^\ \
28
Второй способ аэродинамического управления движением самолета
путем непосредственного создания аэродинамических сил предусматривает
три основных управляющих воздействия: по силе лобового сопротивления 8 Х , аэродинамической подъемной силе 8у и аэродинамической боковой
силе 8г.
Управляющее воздействие по силе лобового сопротивления-угол отклонения 8Х органов непосредственного управления силой лобового сопротивления (например, тормозных щитков) для создания ее приращения.
Для создания положительного воздействия 8Х необходимо выпустить
тормозные щитки. Это приводит к увеличению силы лобового сопротивления на величину управляющей силы лобового сопротивления
Ха5, = Ха% 8Х = сх^ я88х,
(1.36)
где Ха"-частная производная силы лобового сопротивления по отклонению органов
управления; схх-коэффициент эффективности органов непосредственного управления
силой лобового сопротивления.
Управляющее воздействие по аэродинамической подъемной силе-угол
отклонения 8у органов непосредственного управления подъемной силой
(например, интерцепторов) для создания ее приращения.
Для создания положительного воздействия необходимо отклонить
интерцепторы из выпущенного положения вниз. В результате подъемная
сила увеличивается на управляющую аэродинамическую подъемную силу Уа5 :
где V/- частная производная аэродинамической подъемной силы по отклонению
органов управления; с'-коэффициент эффективности органов непосредственного
управления подъемной силой.
Управляющее воздействие по аэродинамической боковой силе-угол
отклонения 8г органов непосредственного управления аэродинамической
боковой силой (например, подфюзеляжного носового руля совместно
с рулем направления) для создания ее приращения.
Для создания положительного воздействия 8г необходимо одновременно отклонить подфюзеляжный носовой руль и руль направления вправо.
Это увеличивает аэродинамическую боковую силу на управляющую аэродинамическую боковую силу 2а8г:
гу
1~тЬх О
2
/-»С2
/ 1 ^ Й \
с
где 2 а ж - частная производная аэродинамической боковой силы по отклонению
органов управления; с "-коэффициент эффективности органов непосредственного
управления боковой силой.
Непосредственному управлению аэродинамическими силами свойственна существенно меньшая инерционность по сравнению с управлением путем
изменения аэродинамических моментов. Помимо аэродинамических спосо29
бон управления движением самолета,
другим основным способом является непосредственное управление тягой.
Управляющее воздействие по тягеугол отклонения рычагов управления
двигателями 8Р для создания приращения тяги.
Для создания положительного воздействия по тяге необходимо отклонить
рычаги от себя. Это приводит к увеличению тяги на величину управляющей тяги
Рис. 1.23. Параметры ветра
Р =
(1.39)
где Рт -частная производная тяги по отклонению рычагов управления двигателями;
срр- коэффициент эффективности рычагов управления двигателями.
Управляющее воздействие по тяге 5Р кроме управляющей тяги Р создает
также и управляющий момент тангажа тяги:
МРж = Мррг 5Р = срр
5Р ,
1 .40)
где М ррр -частная производная проекции момента тяги на связанную ось О2 по
отклонению рычагов управления двигателями.
Внешние возмущения. Все возмущения, действующие на самолет в
полете, можно условно разделить на две группы возмущений. К первой
группе относятся возмущения, связанные с изменением состояния самолета: выпуском механизации крыла и шасси, отказом двигателя и т.д. Ко
второй группе возмущений относятся возмущения, связанные с изменением
состояния окружающей среды: ветром, турбулентностью атмосферы и т. д.
Для учета влияния на движение самолета возмущений первой трупы их
действие приводят к удобному для исследований виду-внешним силам
и моментам.
Результирующая внешняя сила Рв- главный вектор системы внешних
сил, действующих на самолет вследствие изменения его состояния. Результирующая внешняя сила Рв определяется проекциями на оси связанной
системы координат: внешней продольной силой Гх, внешней нормальной силой
Гу и внешней поперечной силой Г2.
Внешняя сила Рв изменяет силу лобового сопротивления, аэродинамические подъемную и боковую силы следующим образом:
х
; УаГ = У$ГУ = с
(1.41)
у
где Х а , Уа , 2 а - частные производные силы лобового сопротивления, аэродинамических подъемной и боковой сил соответственно по внешним продольной, нормаль30
ной и поперечной силам; сх>, с^, с 2 -частные производные коэффициентов силы
лобового сопротивления, аэродинамических подъемной и боковой сил по составляющим внешней силы.
Зависимости аэродинамических сил от внешних сил можно считать
линейными, определяемыми соответствующими частными производными.
Результирующий внешний момент Мв-главный вектор системы внешних моментов, действующих на самолет вследствие изменения его состояния. Он определяется проекциями на оси связанной системы координат:
внешними моментом крена тхВ, моментом рыскания туВ и моментом
тангажа т2В.
Внешний момент Мв изменяет аэродинамические моменты крена,
рыскания и тангажа следующим образом:
МхВ = КС тхв = т? Ч81тхВ; МуВ = М™" туВ = т*' Ч81туВ;
М2В = МГВ т2В = тГ" ч5Ъат2В.
(1.42)
С учетом управляющих воздействий и внешних возмущений аэродинамические силы, действующие на самолет, имеют вид:
Ха = Хаа + ХаМ + Ха8к + ХаГ1; У а = Уаа + УаМ + Уа8у + УаГ;;
2а = 2ар + 2а8г + 2аГ;.
(1.43)
С учетом управляющих воздействий и внешних возмущений аэродинамические моменты, действующие на самолет, определяют следующим
образом:
Мх = Мхр + Мха + МХ(Й1 + МХИу + Мх51 + Мх8> + М Хв ;
Му = М ур + Муа + МуШу + Муш< + Му5в + Му5о + М У в ;
(1.44)
М2 = М20 + Мш + Мгр + -М2Шг + М2й + М25_ + Мгф + М 2 в .
В качестве основного внешнего возмущения со стороны окружающей
среды рассмотрим действие ветра, которое характеризуется следующими
параметрами (рис. 1.23).
Скорость ветра XV- скорость среды, не возмущенной самолетом, относительно какой-либо из земных координат. Ее можно определить в виде
проекций на соответствующие оси ^х, АУ у , \У 2 . Угол ветра Ч^-угол между
осью ОХВ нормальной системы координат и проекцией скорости ветра XV на
горизонтальную плоскость ОХ828 нормальной системы^координат. Наклон
ветра 0ж-угол между направлением скорости ветра XV и горизонтальной
плоскостью.
При исследовании динамики движения самолета действие ветра в
вертикальной плоскости удобно учитывать в виде приращения угла атаки
XV
\У
<хж = агс1ё ^ = агс1ёу о + у ^ ,
(1.45)
где V-опорное значение воздушной скорости.
31
В силу того, что V 0 » XV,, и V » ХУ у ,
\Х7
-.
(1-46)
у°
Тогда угол атаки самолета с учетом действия ветра
(1.47)
Аналогичным образом действие ветра в горизонтальной плоскости
удобно учитывать в виде приращения угла скольжения
Р. - - агс!8
XV
= - ал*,
XV
= -
\У
.
(1.48)
Тогда с учетом действия ветра угол скольжения самолета
Р = Р-Р„.
(1-49)
Контрольные вопросы
1. Какими параметрами определяется положение самолета в поступательном движении относительно Земли? Какие при этом используются системы координат?
2. Какими параметрами определяется положение самолета во вращательном
движении относительно Земли? Какие при этом используются системы координат?
3. Какими параметрами определяется вращательное движение самолета относительно воздушной среды? Взаимное расположение осей каких систем координат
задают эти параметры?
4. Какими параметрами определяется поступательное и вращательное движение самолета относительно Земли?
5. Перечислите и дайте характеристику основных видов движения самолета.
6. Определите силы, перегрузки и моменты, действующие на самолет в полете
при отсутствии управляющих воздействий и внешних возмущений.
7. Определите основные управляющие воздействия и внешние возмущения.
8. Из каких составляющих складываются аэродинамические силы и моменты?
9. В прямолинейном полете угол атаки а = 5° и угол тангажа I) = 3°. Чему
равен угол наклона траектории 9?
10. В прямолинейном полете угол скольжения Р = 8° и угол рыскания у = 5°.
Чему равен угол пути Ч*?
32
Глава 2
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ПРОСТРАНСТВЕННОГО
ДВИЖЕНИЯ САМОЛЕТА
2.1. УРАВНЕНИЯ ДВИЖЕНИЯ
Пространственное движение самолета описывается системой дифференциальных уравнений. В главе 1 были введены понятия собственного
и вынужденного, поступательного и вращательного движений самолета.
Вывод уравнений удобно провести отдельно для каждого из перечисленных
видов движения с последующим их объединением в общую математическую модель пространственного движения самолета.
Уравнения собственного поступательного движения. Собственное поступательное движение самолета описывается системой динамических и кинематических дифференциальных уравнений. Динамические уравнения описывают движение центра масс самолета относительно Земли и позволяют
установить зависимость между параметрами поступательного движения
самолета относительно Земли (земной скоростью У К , углом пути *Р, углом
наклона траектории 9) и параметрами движения самолета относительно
воздушного потока (углом атаки а, углом скольжения р, скоростным углом
крена уа).
Динамические уравнения получаются из векторного уравнения для
количества движения относительно центра масс самолета:
•т^ = Р к ,
(2.1)
где т -масса самолета; Р ж - вектор сил, действующих на самолет в траекторией
системе координат.
От векторного уравнения (2.1) перейдем к скалярным уравнениям. Для
этого определим проекции вектора й\гж/й1 на соответствующие оси. Так как
траекторная система^координат вращается относительно^ нормальной с
угловой скоростью ю*,., проекции производной вектора У К можно определить следующим образом:
/у
Уу1 + со 2 > У Х 1 -ш Х 1 У г 1 ;
(2.2)
= У « -4- со« VУж— саУ, Vх, '
2
х
где У х> , Уу>, Уг -проекции вектора скорости V , на оси траекторией системы
координат; Ух>, Уу>, У^-проекции производной вектора скорости на оси траекторией
системы координа'т; шх , о>У(, ш^- проекции вектора угловой скорости со, вращения
траекторной системы координат относительно Земли на траекторные оси.
2 Зак. 948
33
С учетом того что Ух> = У к ; Уу_ = Уг> = 0; Уу> = У2> = 0, уравнения (2.2)
упрощаются:
"
«у, V,.
(2.3)
Определим кинематическую связь проекций вектора <»„ угловой скорости вращения траекторией системы координат относительно нормальной с углами и их производными, характеризующими положение траекторией системы координат относительно нормальной:
юх = Ф 8Ш 9; юу = Ф сок 9; еог = 6.
(2.4)
Примем допущение об отсутствии ветра, тогда значение земной
скорости У к совпадает со значением воздушной скорости V, = V и векторное уравнение (2.1) с учетом уравнений (2.2)-(2.4) примет следующий
скалярный вид:
1
т ^ = Р Хж ; тУб = Р Уж ; - тУ^ сок 9 = Р^,
(2.5)
где Р х , Ру , Рг<-проекции вектора сил Р, на оси траекторией системы координат.
Рассмотрим правую часть системы уравнений (2.5). Движение центра
масс самолета в основном определяется действием трех видов сил: вектора
тяги двигателей Р, вектора аэродинамической силы Ж А и вектора силы
тяжести самолета <3. Спроецировав эти силы на оси траекторией системы
координат, получим:
Р '= Р '+ К * 4- О
'
"
^"^
При этом мы пренебрегаем действием кориолисовой силы инерции
и переносной силы инерции, связанных с вращением Земли. Для получения
проекций вектора тяги Р воспользуемся матрицей направляющих косинусов (см. табл. 1 приложения), позволяющей перейти от связанной системы
координат к траекторией:
Р х _ = Рсозасо&р;
Ру = Р(5пгасо8у а + соз а зт (} зш у а );
Р2 = Р (зт а зт у а — соз а зт р соз у а ).
В уравнениях (2.7) предполагается, что тяга двигателей Р, лежащая
в плоскости симметрии самолета ХОУ, составляет с осью ОХ угол <рр = 0.
В пртивном случае этот угол необходимо прибавить к углу атаки а.
Для получения проекций вектора аэродинамической силы К А на
траекторные оси координат воспользуемся допущением об отсутствии
ветра. Тогда траекторная система повернута относительно скоростной на
угол уа вокруг оси ОХа. Поэтому проекции аэродинамической силы К А на
оси траекторией системы координат выражаются через проекции на
скоростные оси:
КАХ Ж = - X,;
К Ау> = У„ сое уа - 2а вш уа;
КА21 = У а зту а + 2 а созу а .
34
Сила тяжести самолета С приложена в его центре масс и направлена
вниз по местной вертикали. Следовательно, она расположена в плоскости
ОХКУК траекторией системы координат и ее проекции имеют вид:
Ст Х 1 =-т§8тв;
О У ж =-т§со80;
С2ж = 0.
(2.9)
Подставим выражения (2.6)-(2.9) в правую часть системы уравнений
(2.5). Тогда с учетом зависимости сил от параметров движения (1.8),
(1.11)-(1-13) получим следующую систему динамических уравнений собственного поступательного движения центра масс самолета в проекциях на
оси траекторной системы координат:
тУ = Р(М, рн, Т„, р, V) сова со$Р - Ха(а, М, р, V) - т§5тв =
= рх>, р,е, М,У, Р,Р„,Т Н );
тУО = Р(М, рн, Тн, р, V) [зта со8уа + соза вшр 8ту а ] +
+ Уа(а, М, р, У)созуа - 2а(р, р, У)«ту а - т§со5в =
= Ру>, р, 0, у., М, V, р, Рн, Тн);
(2.10)
— тУФсозЭ = Р(М, рн, Тя, р, V) [зта 8шуа — сока 5т(3 со§уа] +
+ У а (а, М, р, У)8ту а + 2а(р, р, У)созу а =
= Р2>, р , у а , М , У , р , р н , Т н ) .
Продолжим построение математической модели собственного поступательного движения самолета, дополнив систему динамических уравнений
(2.10) кинематическими уравнениями. Эти уравнения позволяют установить
зависимость между параметрами положения самолета в поступательном
движении относительно Земли (пройденным расстоянием Ь, боковым
отклонением 2, высотой полета Н) и параметрами этого движения (воздушной скоростью V, углом пути Ч* и углом наклона траектории 6).
Кинематические уравнения поступательного движения описывают движение центра масс самолета относительно Земли. Вектор земной скорости
самолета УК определяется проекциями на нормальные оси с помощью
таблиц направляющих косинусов (см. табл. 1 приложения). Учтем тот факт,
что оси нормальной системы координат параллельны осям нормальной
земной системы координат. При допущении отсутствия ветра V, = V
координаты самолета в нормальной системе координат х8, ув, 2е удобно
заменить на параметры положения самолета Ь, Н, 2. Тогда
(11
(2.11)
Система динамических уравнений (2.10) и система кинематических
уравнений (2.11) представляют собой математическую модель собственного поступательного движения самолета.
Уравнения собственного вращательного движения. Собственное вращательное движение самолета описывается системой динамических и кине2'
35
магических дифференциальных и алгебраических уравнений. Динамические
уравнения описывают движение самолета относительно его центра масс
и позволяют установить взаимосвязь параметров вращательного движения
самолета (скоростей крена сох, рыскания соу и тангажа со2).
Динамические уравнения получают из векторного уравнения для главного кинетического момента относительно центра масс количества движения-самолета как твердого тела К.:
§=М К .
(2.12)
От векторного уравнения (2.12) перейдем к скалярным уравнениям. Для
этого определим проекции вектора (Ж/сН на оси связанной системы
координат. Так как проекции производной вектора К зависят от составляющих угловой скорости со вращения связанной системы координат относительно Земли, то система скалярных уравнений определяется следующим
образом:
= К х + со у К 2 -со 2 К у ;
(—) =
^К + гс+осоК
с оу К х ,
-^_К
К у -со
х
(213)
(2.13)
где К х , К у , К2 -проекции вектора кинетического момента самолета К на оси
связанной системы координат; Кх, &у, Кг проекции производной вектора кинетического момента самолета на оси связанной системы координат.
Проекции вектора кинетического момента X на оси связанной системы
координат имеют вид:
где 1Х, 1у, 1Г- осевые моменты инерции самолета; 1ху, 1хг, 1у2 - центробежные моменты
инерции самолета.
Моменты инерции самолетов с меняющейся в полете массой вследствие
выгорания топлива являются в общем случае функциями времени, однако
мы этой зависимостью пока будем пренебрегать.
Поскольку основная плоскость ОХУ связанной системы координат
является плоскостью симметрии самолета, то центробежные моменты
инерции, содержащие координаты 2, равны нулю: 1Х2 = Зуг = 0. Тогда
система уравнений (2.13) упрощается:
со2
т .
(Щ
36
,<и/ 2 ~
г г
»
;
1/т
у
_
Т \
*'®*&у
Т
и2
х Мх
^
_
•
ю
2
>'''
(^ 1 ^"1
С учетом зависимости моментов от параметров движения (1.22), (1.25),
(1.28), а также допущения о равенстве нулю моментов крена и рыскания
силы тяги получим следующую систему динамических уравнений собственного вращательного движения самолета относительно его центра масс
в проекциях на оси связанной системы координат:
^»х - ^у<»у + У* -Лу)ю у ю г + *ху<»х<», = МХ(Р, а, со8, юу, р, V);
1уа>у - 1хусох + (1Х -Д2)юх(вг - 1 ху а> у ш г = Му(Р, а, сох, соу, р, V); (2.16)
;гсог + (1У -;х)<вхюу -
т
ху
(юх - Юу) = МКг(а, а, Р, а>г, М, р, V, рн, Тв).
Продолжим построение математической модели собственного вращательного движения самолета, дополнив систему динамических уравнений
(2.16) кинематическими уравнениями. Эти уравнения описывают вращательное движение самолета относительно Земли и позволяют установить
зависимость между параметрами положения самолета во вращательном
движении относительно Земли (углами крена у, рыскания VI/, тангажа и)
и параметрами этого движения (скоростями крена юх, рыскания соу и
тангажа
гаг).
_^
Вектор угловой скорости самолета со относительно нормальных осей
равен геометрической сумме угловых скоростей связанной системы координат. Поэтому векторное кинематическое уравнение вращательного
движения самолета записывается следующим образом:
й>=^ + М / + ~ С .
(2.17)
Проецируя векторы ~у, VI/ и "6 на оси связанной системы координат,
получим скалярную систему уравнений:
оох = VI/ зш о + у;
<иу = о яш у + VI/ сое и соз у.;
юг = и соя у — \|/ сок и зт у.
(2.18)
Решим систему уравнений (2.18) относительно у, VI/ и 0, получим
необходимые кинематические уравнения:
у = оох — 1§ч((йу соху — юг 8шу);
VI/ = 8есо(юу соку — сог 8ту);
(2.19)
С = (Оу 8Ш у + Юг С08 у .
Система динамических уравнений (2.16) и система кинематических
уравнений (2.19) представляют собой математическую модель собственного вращательного движения самолета. Таким образом получены 12
уравнений движения самолета, связывающих между собой 15 параметров
положения и движения самолета. Для того чтобы система уравнений стала
замкнутой и имела решение, необходимы еще три уравнения. Эти уравнения получим, установив геометрические соотношения между углами,
определяющими параметры положения и движения самолета.
Пользуясь таблицей направляющих косинусов (см. табл. 1 приложения),
можно путем определенных преобразований получить взаимосвязь между
параметрами положения и движения самолета в связанной системе
37
координат (у, у, и), скоростной системе координат (а, Р, у а ) и траекторией
системе координат (Ч*, 0). При отсутствии ветра эта связь определяется
следующим образом:
зт а = {[зт о созу соз (Ч* — ч/) + зт у зт (Ч* - V)/)] соз 9 —
— зт 0 соз и соз у}/соз р ;
зт р = соз 0 [зт и зт у соз (Ч* — у) — соз у зт (Ч* — VI/)] —
(2.20)
— зт 0 соз и зт у ;
зт у а = [соз а зт р зт и — соз и (зт а зт Р соз у — соз р зт у)]/соз 0 .
Таким образом, математическая модель собственного движения самолета содержит систему динамических (2.10) и систему кинематических (2.1 1)
уравнений поступательного движения, систему динамических (2.16) и
систему кинематических (2.19) уравнений вращательного движения, а также
систему уравнений геометрических соотношений (2.20).
Уравнения вынужденного движения. Дополним полученную математическую модель собственного движения вынужденной составляющей под
действием внешних возмущений и управлений. Ветер изменяет проекции
вектора тяги Р и вектора аэродинамической силы на оси траекторией
системы координат. С учетом зависимостей сил, действующих на самолет
от управляющих воздействий и внешних возмущений (1.45), система
динамических уравнений поступательного движения самолета (2.10) преобразуется следующим образом:
= Р(М, рн, Тн, р, V, 5Р) соз(а - сцу) соз(р - Рш) — Ха(а, М, р, V, 5Х, Г х )соз ау, соз р^ +
+ У а (а, М, р, V, 5у, Г у ) зша^ зтр № — т§зт0 =
= Рх>(а, р, 0, М, V, р, рв, Т., 6 р> 5 Ж , 5у, Гх, Гу, с%, р^);
= Р(М, рн, Тн, р, У, 8Р) [зт(а - оцу) созу а +
+ соз (а — а^) зт(р — рэд) зту а ] +
+ Ха(а, М, р, V, Б!, Г х ) зтоцу зт рте +
+ У а (а, М, р, V, 8у, Гу) соз уа соз с% соз Р^ - 2а(р, р, V, 5г, Г2) зту а - т§ соз 6 =
, р, 0, М, V, р, Рн, Тн, 5р, 5Х, 5у, 5г) Г х> {у, Гг, а№, Р№);
= Р(М, рн, Тн, р, V, 5Р) [зт(а - а^) зту а — соз (а — о^) зт(Р — Р^) созу а ] +
+ Уа (а, М, р, V, 5у, Г у ) зт уа + 2а (р, р, V, 5г, Гг) соз уа =
= Рг>, Р, У а , М, V, р, Рн, Тн, 8р, б у , 52, 1у, Гг, <%, р^).
38
(2.21)
С учетом зависимостей моментов, действующих на самолет, от
управляющих воздействий и внешних возмущений (1.46) система динамических уравнений вращательного движения самолета (2.16) имеет вид:
й
•^А - ^у у + (•'г ~ -М <а у Ю г + ^у<О х Юу = М Х (Р, О, Ю х , <0у,
р, V, 8 Э ? 5 Н , т хв );
1усву - 1 ху ю„ Н- (1Х - Зх) ш х ю г - 1ху(оуюг = Му(Р, а, ш х , юу,
р, У,б э ,б н ,т у в );
(2.22)
12юг + (1У - 1Х) со х ю у - 5ху(сох - Юу) =
= Маг(а, а, Р, сог, М, р, V, р„, Т„, 8Р, 5В, ср, тгв) .
Система кинематических уравнений поступательного движения (2.11)
и система кинематических уравнений вращательного движения (2.19)
остаются без изменений. В геометрических соотношениях (2.20) следует
учесть составляющие ветра:
зт(а — оцу) = {[яти созу со8(*Р — \|/) + зту вт^Р — \|/)] сох 9 +
+ зтб сохи со«у}/со5(р — р^);
81П (Р — р\у) = СОЯ 0 [«Ш О 81П у СОК (Ч* — (|/) — СО5 у 5Ш (Ч* — 1/)] —
— зт 9 соз о зт у ;
(2.23)
8т у = {соз(а — а^)зт(Р — р
— соз(Р
Таким образом, математическая модель вынужденного движения
самолета содержит систему динамических (2.21) и систему кинематических
(2.11) уравнений поступательного движения, систему динамических (2.22)
и систему кинематических (2.19) уравнений вращательного движения, а
также систему уравнений геометрических соотношений (2.23).
2.2. ЛИНЕАРИЗОВАННЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
Полученные в предыдущем параграфе математические модели пространственного движения самолета в виде систем дифференциальных уравнений являются нелинейными. Их решение как аналитическими, так и
численными методами затруднено. Однако если принять допущение о том,
что значения параметров движения самолета в возмущенном движении
отклоняются на малые величины по отношению к тем значениям этих
параметров, которые имели место до начала действия возмущений, то
появляется возможность перейти от нелинейных моделей к линейным.
На этом допущении базируется идея метода малых возмущений,
позволяющего рассматривать возмущенное движение самолета как совокупность опорного (невозмущенного) движения и движения под действием
малых возмущений.
39
Примем допущение о малой продолжительности переходных процессов
при возникновении возмущений. На этом допущении базируется идея
метода «замороженных коэффициентов». Сущность этого метода состоит
в том, что отрезок времени I, в течение которого происходит исследуемое
движение, разбивается на отдельные интервалы. На этих интервалах
коэффициенты уравнений принимаются постоянными и равными их значениям в начале интервала. Тогда математическая модель будет состоять из
совокупности дифференциальных уравнений с постоянными коэффициентами, причем число таких уравнений равно числу интервалов времени.
Линеаризованные уравнения собственного поступательного движения.
Рассмотрим нелинейную математическую модель собственного поступательного движения в виде системы динамических уравнений (2.10); Анализ
правой части уравнений показывает, что проекции вектора сил Рк на оси
траекторией системы координат Рх , Ру , Р^ являются нелинейными
функциями параметров движения самолета и параметров окружающей
среды. Пренебрегая изменением с высотой плотности воздуха р н , давления
ря и температуры Тн, с достаточной для практики точностью приближения
эти функции можно представить следующим образом:
Р„ = Рх>, Р, 0, М, V);
Ру, = Р у >,Р,0,у а ,М,У);
Р21 = Р2ж(а, Р, у а , М, V).
Применим метод малых возмущений для линеаризации уравнений (2.10)
с учетом зависимостей (2.24). Параметры возмущенного движения выражаются через параметры опорного движения а°, Р°, 9°, у°, М°, V 0 и малые
отклонения параметров возмущенного движения от их значений в опорном
движении Да, Ар, Д0, Ду а , ДМ, ДУ:
а = а° + Да;
Р = р° + ДР;
0 = 9° + Д0;
(2.25)
уа = у° + Ду а ;
М = М° + ДМ;
У = У° + ДУ.
Рассмотрим первое из динамических уравнений (2.10) поступательного
движения самолета относительно траекторной оси ОХГ
с!У
т — = РХ>, р,9, М,У).
(2.26)
Опорному движению соответствует одно из частных решений уравнения
(2.26) V = У°. Если подставить это частное решение в (2.26), то получим
уравнение, отвечающее опорному движению:
<1У°
т - = Рх (а°, р°, 0°, М°, У°) .
<и
(2.27)
Вычтем из уравнения (2.26) уравнение (2.27):
т — — = Рх (а, Р, 0, М, V) - Рх (а°, Р°, 0°, М°, У°) .
т
'
40
(2.28)
Разложим нелинейную функцию Рх (а, р, 0, М, V) в ряд Тейлора по
степеням вариаций Да, Др, Д6, ДМ, ДУ в окрестности значений а°, Р°, 9°,
0
М°, V :
РХк(а, р, в, М, V) = РХж (а°, р°, в», М°, V») +
+ р х> Да + Р^ДР + Р Х ж Д0 + Р^ДМ + Р^ДУ + Рх (Да, ДР, Д0, ДМ, ДУ),
(2.29)
где Р
Р
=
Р
Р
=
Р
=
*. = (-0?).' *- (-3?).' *. = 11ГЛ' *« иГЛ' *. (^-частные
производные, взятые в бкрестности опорного движения, которые определяются по
формулам табл. 2 приложения с учетом (1.13); Рх (Да, Д(3, Дв, ДМ, ДУ)-совокупность
членов разложения выше первого порядка малости.
Подставим разложение (2.29) в уравнение (2.28) и получим линейное
динамическое уравнение поступательного движения самолета относительно
траекторией оси ОХК:
Р Х1 Де + Р Д р .
'(2.30)
Аналогичным образом проведем линеаризацию динамического уравнения поступательного движения самолета относительно траекторией оси
ОУК (2.10):
тУ° Дб = Ру( Да + Руж ДУ + р" ДМ + Рук Д6 + Р^ ДР + Ру; Ду . (2.3 1 )
Коэффициенты уравнения Р^, Р^, Р у> , РУ1, Р^, Ру] приведены в табл.
2 приложения.
Для динамического уравнения поступательного движения самолета
относительно траекторией оси О2К (2.10) получим следующее линеаризованное уравнение:
- тУ° сое 0° Д* = Р"ж Да + Р^ Д V + Р^ ДМ + Р°и Д0 +
р
+ Р 2 _Др + Р1;Дуа.
(2.32)
Коэффициенты уравнения Р™ , Р2 , р^ , Р2>, Р2 , Р^' приведены в табл.
2 приложения.
Линеаризуем кинематические уравнения поступательного движения
самолета (2.11). Для опорного движения вдоль траекторией оси ОХК
°
= У° соз 0° соз У .
(2.33)
Для возмущенного движения
1
о
ш
(1
аУ
— (Ь° + ДЬ) = У° С08 0° СОЗ Т° + —: (V СОЗ 0 СОЗ Т)0 ДУ +
+ — (V сок 0 соз У)0 Д0 + — (V сов 0 соз Т)0 ДЧ* .
ао
ат
(2.34)
41
Вычтем из уравнения (2.34) уравнение (2.33):
1
1
0
Д1 = соя 0° соз Ч" ДУ - V соз Ч" зш 9° Д9 - V соз 0° зш Ч* ДЧ* . (2.35)
Аналогичным образом выполним преобразования для двух других
уравнений (2.11):
АН = 8ш е° АУ + У° соз е° А9 ;
0
0
(2.36)
0
Аг = У° 8ш 9° зт Ч* А6 - со« 9° зт Ч* АУ - У° соз 9° соз Ч* ДЧ* . (2.37)
Линеаризованные уравнения собственного вращательного движения.
Нелинейная математическая модель собственного вращательного движения самолета содержит систему динамических уравнений (2.16) и систему
кинематических уравнений (2.19). Анализ правой части динамических^равнений показывает, что проекции вектора результирующего момента Мк на
оси связанной системы координат М х , М у , Мк> являются нелинейными
фукциями параметров движения самолета и управляющих воздействий.
Эти функции с достаточной для практических задач точностью можно
представить следующим образом:
М х = Мх(а, У, со,, юу, р);
М у = Му(а, У, а> ж , а>у, р);
(138)
Мк, = МЕДа, а, со г ,У, М, Р).
Выразим параметры возмущенного движения через параметры опорного движения ю°, со °, а>°, а° и малые отклонения Дсо„, Дшу, Дсог, Да:
юх = со° + Д(о„;
соу = Шу + Аеоу;
сог = со° + ^®г ;
а = а" + Да .
Рассмотрим первое из динамических уравнений (2.16) вращательного
движения относительно оси ОХ. Опорному движению соответствует одно
из частных решений уравнения (2.16) для сох = со° и соу = ю°. Если подставить это частное решение в (2.16), то получим уравнение, 'бтвечаюшее
опорному движению:
* ~ ^ )Ю У Ю °+ ^ю°ю?= м"(а°' уо> & ^у ро)' (139)
{1
В ближайшей окрестности опорного движения
°
°
е
(ю° + Д(ох)(со; + Асоу) = Мх(а°, V , ю°, со°, Р°) + М" Да + Мх А V +
+ М™' Дюх + М™' Асоу + М^ АР + Мх (Да, АУ, Дсох, Дсоу, АР) ,
(2.40)
водные, которые взяты в окрестности опорного движения с учетом (1.23) и приведены в табл. 3 приложения; М х (Да, ДУ, Д<ох, Дсоу, Д|3)- совокупность членов
разложения выше первого порядка малости.
42
Вычтем из уравнения (2.40) уравнение (2.39) и получим линейное
динамическое уравнение вращательного движения самолета относительно
связанной оси ОХ:
:х Дюх - 1ху Лсоу = М" Да + Мх ДУ + М х ' Аю х + М х ' Ашу + М^ Ар .
(2.41)
Аналогичным способом проведем линеаризацию динамического уравнения вращательного движения самолета (2.16) относительно связанной оси
ОУ:
Дйу - 1ху Дюх = М° Аа + Му ДУ + М, ' Дюх + Му ' Аюу
(2.42)
..
,а « , ,о), <й„ »,
где коэффициенты
уравнения, М„,
М у , Му , Му", Му взяты в окрестности опорного
движения и приведены в табл. 3 приложения.
ъ
жй
Для динамического уравнения вращательного движения самолета
относительно связанной оси О2 (2.16) получим следующее линеаризованное уравнение:
;
;2 ДоЬг = Мкг Асо2 + Мя Аа + М^ АУ + Мя АМ + М^ Ар,
(2.43)
1
где коэффициенты уравнения М^ , М^ , Мк , Мк , М^ взяты в окрестности опорного
движения и приведены в табл. 3* приложения.
Аналогичным образом выполняют линеаризацию кинематических
уравнений вращательного движения (2.19), для которых, пренебрегая
величинами второго порядка малости, получим:
Ау = (ю° 8ту° — га" созу°) Аи/соз2 и° + ю° — 1§и° соку 0 Аю у ;
(2.44)
АО = соз у° Аеог + зт у° Асоу + (ео° со» у° — со° зт у°) Ау ;
(2.45)
Д\1/ = — 8ту° Асог/со8и° + соу со8у° 1§ и° Аи/соз о° + соз у° Асоу/со8 о° —
— (шу «т у ° + со° сову 0 ) Ау/созо".
(2.46)
Линеаризованные геометрические соотношения между углами, определяющими положение самолета в различных системах координат (2.20),
с учетом пренебрежения величинами второго порядка малости принимают
вид:
СО87° СО80С
Да = - '- - (соей0 созрр - ш°) Аи - сози0 А9 + 8ш(Ч/0 - м/°) Ау);
сок а° соз (3°
(2.47)
соз р° АР
о
л
сози» Аи А9 СО8у „ СО8(Ч<„ _у0)
у;
(2.48)
43
Дуа = - ( — сое о° соя а° 8т р° СОБ у° Да + сок а° сое и° 8Ш Р° Аи +
С08 у ° СО8 9°
+ СО8 Р° (СО8 а° 8Ш 0° — СО8 и" С08 у° 51П а°) АР + СО8 0° С08 Р° С08 у° Ду) .
(2.49)
Таким образом, линеаризованная математическая модель собственного
движения самолета характеризуется уравнениями (2.30)-(2.32), (2.35)(2.37), (2.41)-(2.49).
Линеаризованные уравнения полного вынужденного пространственного
движения. Проведем линеаризацию математической модели вынужденного
движения самолета (2.21) с учетом того, что проекции вектора сил Р, на оси
траекторной системы координат следующим образом зависят от параметров управляющих и возмущающих воздействий:
РХ, = Рх,(5х, 5 у> 5Р, Гх, Гу, а№, Р,у);
РУш = РУ>(5Х, 5У, 8„ 5Р, Гж, Гу, Гг, а*, р№);
(2.50)
Рг„ = Рг,(5у> 5г, 5Р, Гу, 12, а^, Рж).
Тогда для динамического уравнения поступательного движения относительно оси ОХК с учетом уравнения собственного движения (2.30) получим
тДУ = Р"к Да + Р^ ДУ + Р^ ДМ + Р^к Д0 + Р^ ДР +
; Д8Х + Р ; Д5у + Р Д5Р + РХ, ДСХ + РХ, ДГУ
(2.51)
Коэффициенты уравнения Рх\ Р х у , Рхр, Рхл , Рх , Рх*, Рх приведены в табл.
4 приложения.
Динамическое уравнение поступательного движения относительно
траекторной оси ОУК с учетом уравнения собственного движения (2.32)
имеет вид
тУ° Д9 = РУк Да н- Ру, ДУ + Р" ДМ + Ру> Д0 + Р^ Др + Р^ Дуа +
+ Р*; Д5Х + Рг8; Д5У + Р25; Д5г + Рг8кр Д8Р + Р^ Дгх +
+ 1А ДГу + Р^ ДГг + Р«" Да^ + Р^ ДР^ .
(2.52)
Коэффициенты уравнения Р^, Р^", Р2*, Р8', Рг"ж, Р^, Р2" , Р"жш. ^ приведены
в табл. 4 приложения.
Для динамического уравнения поступательного движения относительно
траекторной оси О2К с учетом уравнения собственного движения (2.32)
получим
- тУ° со80° ДФ = Р"_ Да + Р^ ДУ + Р^ ДМ + Р2> Д0 +
44
+ Р^ Ар + Р1; Дуа + Р^' А5у + Р*; А5г + Р*; А5Р +
Р
+ I* ДГу + I* АГг + Р°« Аа^ + Р2 ; ДР^ .
у
Р
р
(2.53)
р
Коэффициенты уравнения Р^ , Р^> 1'> ^ Р^> "7> г,™ приведены в табл.
4 приложения.
Уравнения (2.35)-(2.37) остаются без изменений.
Для динамических уравнений вращательного движения учтем следующие зависимости проекций вектора результирующего момента 1ЙК от
управляющих и возмущающих воздействий:
М* = МХ(5Э, 8Н, тхв, <х№, р\у);
М у = М у (5 э , 5Н, тув, о^, р № );
(2.54)
М Кг = МК2(58, 5Р, ф, тгв> а№,
Тогда для динамического уравнения вращательного движения относительно оси ОХ с учетом уравнения собственного движения (2.41) получим
Дх Аюх - ;ху Асоу = М" Аа + Мх АУ + М"" Аюх + !<" Аюу +
+ М^ АР + Мх' А5Э + Мх" А8„ + М™" Ат хв + Мх* Аа^ + М^ Ар № .
(2.55)
Коэффициенты уравнения Мх', Мхв, М™", Мх", Мх" приведены в табл.
5 приложения.
Динамическое уравнение вращательного движения относительно оси
ОУ с учетом уравнения собственного движения (2.42) имеет вид
Зу Ао>у - 1ху Аюх = М° Аа + Му АУ + М™' Аюх + Му' Ашу +
+ Му1 АР + Му' А5Э + Му" А6Н + Му"" Ат ув + М"* Аа^ + М^ АР№ .
(2.56)
Коэффициенты уравнения Му% Му", М™", М"", Му приведены в табл.
5 приложения.
Для динамического уравнения вращательного движения относительно
оси О2 с учетом уравнения собственного движения (2.43) получим
.Гг Аюг = М^ Асо2 + Мкг Аа + Мкг Аа + Мяг АУ + Мкж АМ + М^ Ар +
+ М^ Д5В + М ?, Аф + Мк", А5Р + Мяг" Ат гв + Мк" Аа № + М^" Ар^, .
(2.57)
Коэффициенты уравнения Мкг, М^ , М^, М^", Мк", Мк* приведены
в табл. 5 приложения.
Система линеаризованных кинематических уравнений вращательного
Движения самолета (2.44)-(2.46) остается без изменений.
45
В линеаризованных геометрических соотношениях учтем составляющие
ветра:
соз у° сок 9°
Да = Дои, + - - - - (со8и°со5(Ч/0 - Х|/°)Ди - со80°Дв + «т (Т0 - \|/°) Ду);
сок а соз р
(2.58)
Дш = {2у° С080° Ди -- — - Д6
У
СОЗОР°-\1/°)
ц.
(2.59)
Таким образом, линеаризованная математическая модель вынужденного движения самолета содержит уравнения (2.35)-(2.37), (2.44)-(2.46),
(2.51)-(2.53), (2.55)-(2.59).
2.3. УРАВНЕНИЯ ДВИЖЕНИЯ В ФОРМЕ КОШИ
Линеаризованная математическая модель отражает физику полного
собственного пространственного движения самолета. Однако ее практическое использование затруднено, так как аналитическое решение системы
дифференциальных уравнений такой высокой размерности сопряжено с
известными сложностями. Для того чтобы систему уравнений можно было
решать с помощью ЭВМ, ее удобно представить в форме Коши, когда
в левой части системы уравнений содержатся только первые производные
от переменных, а в правой части линейные комбинации переменных.
Уравнения собственного поступательного движения в форме Коши.
Преобразуем уравнения собственного поступательного движения к форме
Коши. Поделим в уравнении (2.30) левую и правую части на массу самолета т, а вместо приращения угла наклона траектории Д9 подставим его
значение из уравнения (2.47). Тогда уравнение относительно скорости ДУ
принимает вид
ДУ = ау 0 Да + ау „ До + ау у ДУ + ау р Др + ау у Ду.
(2.60)
Обозначения для. коэффициентов уравнения ау „, ау „, ау у, ау р, ау у
приведены в табл. 6 приложения.
Левую и правую части уравнения (2.31) поделим на произведение массы
самолета на скорость в опорном движении тУ°. Кроме того, подставим
вместо приращения скоростного угла крена Дуа его значение из уравнения
(2.49):
Д9 = ае а Да + а в|У ДУ + ае е ДО + ав „ До + ав р Др + ае у Ду. (2.61)
Обозначения для коэффициентов уравнения а в а , а е у , а в в , а в1) , ае р, а в у
приведены в табл. 6 приложения.
Левую и правую части уравнения (2.32) поделим на — тУ° сок 9°.
Подставим вместо приращения скоростного угла крена Дуа его значение из
уравнения (2.49):
46
ДФ = а^ц Да + ач/^ Ди + а^у ДУ 4- а^р Др 4- а.^ Ду.
(2.62)
Обозначения для коэффициентов уравнения а^ а, а^и, а^у, а^р, а^, у
приведены в табл. 6 приложения.
В кинематических уравнениях поступательного движения (2.35) и (2.37)
введем обозначения а Ь]У , а ь „, а ич /, а 2>у , а^е, а.гу согласно табл. 7
приложения:
ДЬ = аи у ДУ 4- ам Д6 + а ь>т Д*;
(2.63)
Д2 = а2,у ДУ + а2|6 Д6 + а,,,, ДЧ*.
(2.64)
В кинематическом уравнении (2.36) заменим приращение угла наклона
траектории Д9 его значением из уравнения (2.47). Тогда с учетом обозначений а Нга , аН]„, ан у, а Н у приведенных в табл. 7 приложения, уравнение
принимает следующий вид:
ДН = ан<а Да 4- ан,„ До + ан,у ДУ + а ау Ду.
(2.65)
Уравнения собственного вращательного движения в форме Коши.
Преобразуем систему уравнений (2.41)-(2.43) к форме Коши. Для этого
выразим из уравнений (2.41) и (2.42) производную скорости крена Дю„:
Дюх = а Шх>а Да + а^у ДУ + а^^ Дшх 4- аЮу ш? Дюу 4- а Щж , р Др.
(2.66)
Обозначения для коэффициентов уравнения аш<1а, а^у, аш 1Шх, аа^Шу, ащ>>р
приведены в табл. 8 приложения с учетом обозначений табл. Ф' приложения.
Аналогичным образом выразим из уравнений (2.41) и (2.42) производную скорости рыскания Дю у :
АсЬу = а„га Да 4- а ту>у ДУ 4- аЮу1а)х Дсох 4- аш>,Юу Дсоу 4- &т^ Др. (2.67)
Обозначения для коэффициентов уравнения аЮу1а, а Шг у, а М1 ^, аШу]0у а Шу>р
приведены в табл. 8 приложения с учетом обозначений табл. Ф приложения.
Для преобразования уравнения (2.43) к стандартному виду из его правой
части необходимо исключить производную Да. Для этого продифференцируем уравнение (2.47) и заменим в нем ДО его выражением из уравнения
(2.46). Заменим Дб его выражением из уравнения (2.61), а Ду-его выражением из (2.44). Полученное выражение для Да подставим в уравнение (2.43),
поделив левую и правую части на момент инерции .^
Дйг = аШ1>ю± Дюг 4- а тж>0 Да 4- а^.До 4- а Шж>у ДУ 4- а^,^ Дсох 4+ аШж>Шу Дюу 4- аЩ!,р ДР 4- аШж,у Ду.
(2.68)
Обозначения для коэффициентов уравнения аИ1 Юг, аШ1>а, аШ1 „, а.^_у, аИ11<0<,
и„ш у . а и г ,р> аЮ1,г приведены в табл. 10 приложения'с учетом обозначении
табл. 9 приложения.
В кинематических уравнениях вращательного движения самолета (2.44)(2.46) введем новые обозначения для коэффициентов уравнений а.,/^, а^,,,
а
а
а
а
а
а
чк,«у «.<»2> о,Шу, «,г у,и' у,и, согласно табл. 11 приложения:
а
Д^ = ау.и. Дюг + V » Ди + ^.«в, ЛСОУ + ан-л Д> У;
(2-69)
47
Аи = а„>Иг Дю2 + а„>Иу Дсоу + а„ у Ау ;
(2.70)
Ду = а У ; 0 АО + а у?Шж Асох + а У | Ш у Асо у .
(2.71)
Для получения уравнения относительно производной приращения угла
атаки Да продифференцируем уравнение (2.47) и заменим в нем производную приращения угла тангажа АС ее выражением из уравнения (2.46),
производную приращения угла наклона траектории АИ -ее выражением из
уравнения (2.61), а производную приращения угла крена-ее выражением из
уравнения (2.44):
Да = аа,«,, Да>2 + аа1а Аа + аа>„ Аи + аа,у АУ + а^ Дюх + аа>Ш; Дшу +
+ а а>р Др + а а > у Д у .
(2.72)
Обозначения для коэффициентов уравнения а„ Шг, аа а, аа „, аа у, аа „,_,
а,«у а а,р> а а,у приведены в табл. 12 приложения.
Для получения уравнения относительно производной приращения угла
скольжения А^ продифференцируем уравнение (2.48) и определим из него
Др. Заменим в этом уравнении производную приращения угла пути ДФ ее
выражением из уравнения (2.62), производную приращения угла рыскания
Д\|/-ее выражением из уравнения (2.45), производную приращения угла
крена Ау-ее выражением из уравнения (2.44) и производную приращения
угла тангажа АС -ее выражением из уравнения (2.46):
Ар = а^ Асо2 + а м Аа + ар „ Аи + а р _ у АУ + а^ Дсох +
а
+ а М у Аю у + а м Д р + а р , у Ду.
(2.73)
Обозначения для коэффициентов уравнения а^, а р а , ар и , а р у, а^^,
р,ш ' а р,р> ар,у приведены в табл. 13 приложения.
Объединим полученные уравнения собственного поступательного и
вращательного движения в модель полного собственного пространственного движения в форме Коши:
а
ДУ = ау а Аа + ау „ До + а У|У АУ + ау р Ар + аУл Ау ;
АИ = ам Да + а9>у АУ + ам АО + ае и Аи + а в>р Ар + а е>у Ау ;
ДФ = а^ ч Да + а1р и До + а^у ДУ + а,, р Ар + ач/ у Ау;
АЬ = а ц у ДУ + аь е Д9 + ацчр ДУ ;
Дг = а2у ДУ + а2 е Д6 + а^ ДТ ;
ДН = ан,а Да + а н>и Аи + а н у АУ + ан,у Ду;
Ай х = аш^а Да + аШх;У АУ + а^,^ Агах + ащ<1Шу Дюу + а^р АР;
А«У = а Юу>а Аа + а ту>у АУ + а,^ Д(ох + а Шу?(0у Аюу + аЩу р АР;
А»г = *«,«, &<»* + *ша Да +
48
,, Аи + а Ш у АУ + ат
ДУ = аж,шг Аю 2 + ^.и Аи + аж;Шу Асоу + а^ Ау ;
Дюх +
Ду = а у>1) До + ау>Шх Дюх + а%(0у Дю у ;
М = аа>0)г Дсог + аа>а Аа + а^ Аи + а а>у ДУ + аа „_ Дюх +
+ а«,а,, Асоу + а а>|5 А(3 + аа,т А у ;
Ар = аМ1 Аш г + а м Аа + ам Аи + а р у АУ + а0 ^ Асох +
+ ар;0)у Асоу + ам Ар + а рл А у .
(2.74)
Уравнения вынужденного движения в форме Коши. Преобразуем систему
уравнений линеаризованной математической модели полного пространственного вынужденного движения самолета в форме Коши. Динамические
уравнения поступательного движения имеют вид:
АУ = ау „ Аа + ау „ Аи + ауу АУ + ау р Ар + ау у Ду + ау ^ А8Х +
+ ау 5 А5У + ау 8р Д5Р + ауд АГХ + ауд АГу + ау а Аа ж + ау р АР Щ ;
(2.75)
Аб = ае,а Да + ае>у ДУ + ам АО + ае>1) Аи + а в1 р Ар + авл Ду +
+ аел А8Х + ав1бу А8у + ае>5р Д5Р + ае,^ Д52 + а у>Гж АГХ +
+ ав,Гу ДГУ + авл ДГг + а^^ Аа ж + аУД- АР Ж ;
(2.76)
ДФ = а^а Да + а^,,, До + а^,у ДУ 4- а,, р Др + а%у Ду + ау>8у Д5у +
+ а.р 5 А52 + а^ 8 Д5Р + ат г ДГу + а^ г ДГг + а,/ а Даш + а^ р Др„.
(2.77)
Выражения для коэффициентов уравнений приведены в табл. 14 с учетом
обозначений табл. 15 приложения.
Для кинематического уравнения поступательного движения с учетом
уравнений (2.65) получим
АН = аН1„ Да + ан>1) Ди + анл АУ + а н>г Ду + ан ^ Да ж ,
(2.78)
где ан,а = У 0 со8е о /а а > е .
Уравнения (2.63) и (2.64) остаются без изменений.
Динамические уравнения вращательного движения с учетом уравнений
(2.66)-(2.68) имеют вид:
Дй
х = аШ1>а Да + аи>]У АУ + а^^ Аю х + а^^ Асоу + а щ>1 р Ар + а^д Д5Э +
+ аШ1|6в Д5„ -^ аШх>т1> Дтхв + а&^ Даж + а^^^ АР Ж ;
Дй)
(2.79)
у = ао,„а Аа + а ш> _ у АУ + а^^ Аю х + а Шу>ш> Дсоу + а И у _ р Ар + а^ А5Э +
+
А§н + а т , т Ат у в + а
Да№ + а Ш А ДР Ш ;
(2.80)
49
Лю2 = аШ11Шг Дсог + а^ Да + а^ Ди + аш>,у ДУ + аШ1](0к Аш х + аШ1>ш
+ а Ш г ц АР + аВ1,г Ду + аШв,8> Д§в + аш>л Д6Р + аЮ|1Л Д5Х + а^ Д5
+ ашЖДаж + а т Ж Др ж .
(2.81)
Выражения для коэффициентов уравнений (2.79)-(2.81) приведены
в табл. 16 и 17 приложения.
Уравнения (2.69)~(2.71) остаются без изменений. Линеаризованные
геометрические соотношения (2.72), (2.73) преобразуем к следующему виду:
Да = аа^ Дшг -Ь аа а Да + аа>1) Ди + аа,у ДУ + аа>Их Дсох + аа>0)> Дозу +
+ аа,р Др + аал Ду + аа^ Д5Х + аа,5у Д5у + аа,51 Д8г + а0|5р Д5Р + ааЛ ДГХ +
+ аа,Гу ДГУ + аа,Гг ДГг + аа,а. Да, + аа,й^ Даж + аа, ^ Др№ ;
(2.82)
Др = ар,Щ1 Дсог + ам Да + а рфи До + ар,у ДУ + аМк Дюх + ав,Юу Дсоу +
+ ам ДР + ар,у Ду + ар,5у Д8у + а рл Д5г + ар,Гу ДГУ +
+ ар,г> ДГг + ар,^ Даж + ар,р, Др^ + ар,^ Др, .
(2.83)
Коэффициенты уравнений (2.82) и (2.83) приведены в табл. 18
приложения.
Таким образом, линеаризованная математическая модель вынужденного движения самолета в форме Коши содержит уравнения (2.63), (2.64),
(2.69)-(2.71), (2.75)-(2.83).
2.4. УРАВНЕНИЯ ДВИЖЕНИЯ В ПРОСТРАНСТВЕ
СОСТОЯНИЙ
Анализ и синтез линейных систем базируется на использовании метода
пространства состояний. Сущность этого метода заключается в том, что
математическая модель исследуемой, системы представляется в виде
системы дифференциальных уравнений в форме Коши для совокупности
переменных, описывающих состояние системы и характеризующих ее
поведение в будущем при условии, если известны состояние в исходный
момент времени и приложенные к системе воздействия.
Уравнение собственного движения в пространстве состояний. Для получения уравнения собственного движения самолета в пространстве состояний
воспользуемся системой уравнений (2.74). Тогда математическую модель
можно представить следующим образом:
х(1) = Ах(1).
(2.84)
50
Вектор-столбец переменных состояния полного пространственного
движения самолета имеет вид
1) Да (г) До(1) ДУ(г) Д9(1) ДН(1) ДЬ(г) х
х Аюх (I) Дюу (I) Д|3 (I) Ду (I) Д\|/ (I) ДУ (I) Д2 (1)] .
(2.85)
Матрица состояния полного пространственного движения самолета
А=
га ,0)
Ч,Р а-»,у 0 0 0
Ч,» аш у 0 0 0
~<ч.«.
ч,-
а
а,о>,
а
а,а
1>,»2
0
у,у
0
0 0
0
0
а
е,в
0 0
0
0
а
Н,У
°
0 0
0
• 0
<^-\_, V
^Ь 9
0 0
0
°
0 0
оу,У
0
р,у
0
0 0
0 0
ч.<°.
у,«
0
0
0 0
ч*.
у.»
0
0
0
0
0
а У;Иу
0
0
0
0
0
а.е
0
0
0
0
0
в,а
а
0
а
Н,а
а
а
члш г
0
0
У,и
8,и
н,о
а
е,у
0
0
V.»
0
а
0
а
га,,а
3
Р,а
0
0
а
0 0
а
Р,ш
0
а
Ч-,а
0
ш„У
а
а
Р,1>
а
а
а
«,р
0
а
0
а
а
0
0
ЗУ, а
а
у
°
0
0
г
а,У
а,о
а
а
0
а
0 0
а
0
а
ч.«.
т,„ а»|/ у
а
0
«Л
а
а
а,<о,
V,»,
а
а
а
а,ш у
а
и,га у
у,р
ю,,шу
аш,,Р
<о,,ш,
а
а
0
0
0
а
«,У
0
0
0
У,у
а
а
т у ,Р
Р,Р
0
а
ч-,у
0
0
0
8,у
0
0
0
а
Н,у
0
0
0
0
0 ацч- 0
0
0
0
0
0
Р,у
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
а
0
у,(Ву
0
а
а
е,р
0
0
р,ю, р,«у
а,у
0
0
а
а
а
ч-,у
0
0 '..ч-
0
(2.86)
Элементы матрицы А в общем случае зависят от времени А(1). Тогда
уравнение состояния (2.84)-линейная нестационарная модель собственного
пространственного движения самолета. Для упрощения последующих исследований будем предполагать, что элементы матрицы состояния А есть
константы. Тогда уравнение (2.84) будет линейной стационарной моделью
собственного пространственного движения самолета.
Решение уравнения (2.84) имеет вид
х(1) = ф(г,1 0 )х(г 0 ),
(2.87)
где х(10)- начальный вектор переменных состояний, определяемый при 10; 10начальный момент времени.
Переходная матрица состояния полного пространственного движения
самолета
2
2
А(
Ф(1,10) = I - А(1 - 10) + ^ А (1 - 10) + ... = е '-Ч
(2.88)
где I-единичная матрица.
51
При 10 = О
Тогда решением однородного уравнения (2.84), описывающего собственное движение самолета, является
А1
х(1) = е х(0).
(2.89)
С учетом стационарности рассматриваемой модели движения самолета
выполним преобразование Лапласа для обеих частей уравнения (2.84)
рХ(р)-х(0) = АХ(р),
(2.90)
где х(0)- начальный вектор переменных состояния, определяемый при ( = 0.
Решение уравнения (2.90) дает
Х(р) = (р1-АГ 1 х(0).
(2.91)
Вычислив обратное преобразование Лапласа от обеих частей уравнения
(2.91), получим
А)- 1 ]х(0),
(2.92)
где Ъ" 1 - оператор обратного преобразования Лапласа.
Таким образом, сравнивая (2.87) и (2.92), приходим к выводу, что
переходная матрица состояния
(1) = Ь-1[(Р1-А)-1],
Ф
(2.93)
а ее изображение по Лапласу
(р1-А); 1 .
(2.94)
Уравнения вынужденного движения в пространстве состояний. Для
получения уравнения вынужденного движения самолета в пространстве
состояний воспользуемся уравнениями (2.75)-(2.83). Тогда неоднородная
математическая модель может быть представлена следующим образом:
* (I) = Ах (I) + Ву иу (I) + Вв ив (I) .
(2.95)
Векторы-столбцы входа по управляющим воздействиям и по внешним
возмущениям в полном пространственном движении самолета имеют вид:
[иу (1)]т = [Д5„(1) Д6 х (г) Д5у(1) Д5р(г), Д5Э(0 Д6„(1) Д62(1)] ;
в
(2.96)
т
[и (1)] = [ДГХ(1) ДГу(1) Дт2В(1) Да^ Да^(1) х
х ДГ2 (I) Дтлв (I) Дтув (I) Др№ (1) Д^ (I)] .
52
(2.97)
у
Матрицы входа по управляющим воздействиям В и внешним возмущев
ниям В в полном пространственном движении самолета имеют вид:
а
<а„&,
0
а
а
-л
™шг,5у
а
а,6 ж
0
ву-
1
«Вг.в,
а
а,5у
0
и,,5р
а,5р
0
о
а
а
а
а,Г,
УС
а
в=
а,8г
0
0
0
0
0
и
Э.у д
3-у ^
Эу §
и
0
(1
\/
я X
С1а
я X
Ли
я х
Лд
0
\/
0
0
0
0
0
С
0
ел
0
0
0
0
0
0
0
0
0
0
0
0
аш>;6э
шг, 8„
0
0
0
0
0
аИуЛ
ЧА
о
0
а р>8у
0
0
0
0
0
0
0
0
0
РА
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
а
а
0
0
а,Г,
У, Г
а
°
а
0
а
а,а„
У, аш
а
а,йш
а
а,Гг
0
0
а
а
а
0
а
(2.98)
а
*,5г
0
Ч Р.
°
°
0
а
а,Р.
°
^
0
а
У,Р«
°
°
0
а
е,р№
°
Ч- Р.
°
е,(,
°
а
е,0„
°
0
0
0
ан>аж
0
0
гц,^
0
0
0
0
0
0
0
0
0
0
4^
0
а р>Гг
0
0
0
0
0
а ш>>аж
0
0
0
0
0
0
0
аМу
0
а р>аж
0
0
0
0
0
0
0
0
0
0
0
а^
0
0
0
0
0
0
0
0
0
0
0
0
0
ауГ
0
а^,,^
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
е,г,
в
а
0
~чл чл ч.™, ч... ч.*, чл °
а
4,6, "
0
(\
е,г,
0
а
шу,т„
ч. р. °
а
Р,Р» аР,^
31}/ р
(2.99)
0
53
у
Элементы матриц В и В" будем считать константами, а модель
(2.95)-стационарной. Решение уравнения (2.95) можно представить в виде
суммы общего решения (собственное движение) и частного решения
(вынужденное движение):
I
у у
х(1) = хсо6(г) + хвын(г) = Ф(1)х(0) + | Ф(1 - т) В и (т) йт +
о
в
в
+/Ф(1-т)В и (т)с1т.
(2.100)
Таким образом получены уравнения собственного и вынужденного
движения самолета в пространстве состояний.
2.5. УРАВНЕНИЯ ПРОДОЛЬНОГО И БОКОВОГО
ДВИЖЕНИЯ
Уравнения собственного продольного и бокового движения. Представим
математическую модель полного собственного движения самолета в пространстве состояний в виде следующего векторного уравнения:
хп(1)
ГА П А б1 ЛГх п (г)1
[Ап6 А6 Л_хб(1)_Г
(2.101)
Вектор-столбец переменных состояния продольного движения самолета
[х„ (*)]г = [Аса,(*) Аа (*) Ли (I) ДУ (I), А9 (I) АН (I) ДЬ(I)].
(2.102)
Вектор-столбец переменных состояния бокового движения самолета
1>6 (Шт = [Ашх (1) Айу (I) Ар (I) Ау (I), Ач/ (I) ДУ (г) Аг (»Д.
(2.103)
Матрица состояния продольного движения самолета
~Ч«ч.
а
а,Ш1
а
м,,а
а
о, а
и,ш,
0
0 0
а
а
а, V
0
0 0
0
0
0 0
0
0 0
а, ц
шг, V
0
0
а
0
а
в,а
а
в.«
а
0
а
Н,а
а
Н,и
а
0
54
а
0
а
А =
а>,,1)
а
Уа
0
а
Уи
0
а
УV
Н,У
е,е 0 0
0 0 0
ацу
ац« 0 0
0у
а
(2.104)
Матрица состояния бокового движения самолета
а
ш,,
ч.
а
Аб =
^
Р,а
а
0
0
0
0
0
0
0
0
0
0
0
"
Рл
0
0
0
0
°
Чу
0
0
0
Ч-,Г
0
0
0
0
0
Е• ш
0
% Ч.«у Ч.и
у,ш,
0
а
«.у,Шу
Ч-Р
а
а
э.«,
е.и
а
у,о>,
а
ч-,<»,
0
п
\/
0
0
я
Сгш
а
а
а
0
(2.105)
Матрица состояния перекрестных связей из бокового движения в
продольное
а
ш,,
а
«. Ч.», Ч,э
а,ш,
0
а
о,га,
а
а
ш,,у
0
0
0
а,р
а,у
0
0
0
«,у
0
0
0
У,у
0
0
0
а„л
0
0
0
а
н,у
0
0
0
0
0 ацч- 0
и,Шу
0
а
0
Зу.р
а
0
0
а
0
0
0
0
0
0
0
А6п =
а
а
е,р
Матрица состояния перекрестных связей из продольного
в боковое
0
0
а
р, «.
А„6 =
а
ю
а
„а
0
<о,а
0
а
Р,а
чи
0
0
0
а
Т,а
0.
<о,,У
0
0
0 0
ау,и
0
ау>))
0
0
0 0
а^у
0
0 0
р,и
а
Ч-,«
0
а
Р,У
движения
Г
0
р,е 0 0
0 0 0
а
о
0
Чл
а
(2.106)
а
(2.107)
М 0 0
^
С формальной математической точки зрения уравнение (2.101) может
быть разделено на два независимых уравнения, если равны нулю или
пренебрежимо малы все элементы матриц А6п и А п 6 .
Для разрежения матриц А6п и Ап6 можно сделать несколько физических
Допущений. Так, если предположить симметричность самолета относи55
тельно плоскости ХОУ, то производные сил и моментов, действующих
в продольной плоскости по параметрам бокового движения, будут равны
нулю:
рР_ = р^ = ръ = м^ = 0 .
(2.108)
Это объясняется тем, что разложение сил и моментов в ряд Тейлора
проводилось в окрестности опорного движения, а сами эти функции равны
нулю в точке, соответствующей опорному движению в силу их симметрии.
Аналогичным образом производные сил и моментов, действующих в
плоскостях ХО2 и УО2, по параметрам продольного движения также
будут равны нулю:
Р«=р 2 У 1 = р^ = М: = М; = мГ = М; = Мхм = Мум = 0.
(2.109)
Следующим допущением является переход к рассмотрению частного
случая пространственного движения, когда самолет летит без крена у° = О,
у° = 0. Тогда зш у° = 0 и зш у° = 0. При малых углах атаки а° = 0 и
8Ш а° = 0. Если движение самолета происходит без скольжения ((3° = 0),
путевой угол совпадает с углом рыскания (Ч*0 = ху°), а опорное движение
совершается с нулевыми угловыми скоростями ю° = ю° = ю° = О (прямолинейный горизонтальный полет без крена и скольжения).
Новые выражения для коэффициентов динамических уравнений поступательного движения приведены в табл. 19 приложения с учетом изменившихся выражений для производных сил. Выражения для коэффициентов
кинематических уравнений поступательного движения, динамических и
кинематических уравнений вращательного движения, а также уравнений
геометрических соотношений приведены соответственно в табл. 20-23
приложения.
Анализ выражений для коэффициентов показывает, что все коэффициенты, составляющие матрицы А6п и Ап6, тождественно равны нулю. Следовательно, А6п = 0, Апб = 0, что позволяет рассматривать продольное и боковое собственное движение самолета независимо друг от друга. Уравнение
(2.102) распадается на два уравнения:
хп(1) = А п х п (1);
(2.110)
= А в х в (1).
(2.111)
Решения уравнений (2.110) и (2.111) имеют вид:
хп(1) = фп(1,10)хп(10);
(2.112)
)х 6 (1 0 ),
(2.113)
0
где фп(1, 10), (рб(1,10)- переходные матрицы состояния соответственно продольного
и бокового движения самолета.
Уравнения вынужденного продольного и бокового движения. Представим
математическую модель полного вынужденного движения самолета в
56
пространстве состояний с учетом модели собственного движения (2.101)
в виде следующего векторного уравнения:
о
4(1)1 ГВУП
в* в'Л [ХЮ]
в в] |_и,(1)_|в б в
(2.114)
Вектор-столбец входа по управляющим воздействиям в продольном
движении самолета
1) Д6 Ж М Д6у(1) Д5р(<)].
(2.115)
Вектор-столбец входа по управляющим воздействиям в боковом движении самолета
Л5Н(1) А8 2 (ВД.
(2.116)
Вектор-столбец входа по внешним возмущениям в продольном движении самолета
[Ип(1)]т = [АГХ(1) ДГу(1) Дт2В(1) Аа№(1) Аа№(1)].
(2.117)
Вектор-столбец входа по внешним возмущениям в боковом движении
самолета
[иб(0]т = [АГ2(1) Ат хв (г)
Атув(1) Др\у(1) Др\Л*)]-
(2.118)
Матрица входа по продольным управляющим воздействиям
О
О
В =
(2.119)
О
О
О
О
О
О
О
О
О
О
Матрица входа по боковым управляющим воздействиям
о> 8
аш>5
ш у ,8 э
Ч,«з"
а
а
0
0
0
0
0
6
0
0
0
0
0
0
а
РА
6'
0
(2.120)
а
ч*А
0
57
Матрица входа по перекрестным связям боковых управляющих воздействий с параметрами состояния продольного движения
0 4,6,
0 0 «Ч «.
0
0 0
0
0 0
0
0 0
а
0 0
ел
0
0 0
0
(2.121)
Матрица входа по перекрестным связям продольных управляющих
воздействий с параметрами состояния бокового движения
"о
0
0
0
0 0
0
0
0 0
м, 0
а
0 0
0
0
0
0
*л
0
0
0
0 0
а
0 0
0 0
(2.122)
Матрица входа по продольным внешним возмущениям
а
а,Г,
а,Гу
0
0
0
Чг,
0
а
э, г,
0
0
0
0
а
0
а
УЛ
а
е, г,
0
0
58
0
о
о
о
о
о
(2.123)
Матрица входа по боковым внешним возмущениям
0
Ч,т„
0
а
0
0
0
Ч, т,.
а
0
ил
0
0
0
0
0
Р,Р*
0
0
0
0
0
ч-,г,
0
0
0
0
0
а
а
а
а
М»
0
(2.124)
0
а
0
0
0
Матрица входа по перекрестным связям продольных внешних возмущений с параметрами состояния бокового движения
0
0
0
0
0
0
а
0
0
0
0
а
0
р,г,
0
0
ч.-.
ч.р«
а
0
0
м»
0
0
0
0
0
0
0
0
т,гу
0
Ч<,аш
0
0
0
0
0
а
(2.125)
Матрица входа по перекрестным связям боковых внешних возмущений
с параметрами состояния продольного движения
" Ч,г, 0 0
0 0
а,Г,
а
а
Чи.
а
0
«,р»
0
0
0 0
0
0
0
0 0
ау,^
0
е,гж
0 0
а
в,Р„
0
0
0 0
0
0
0
0 0
0
0
(2.126)
59
Элементы матриц раскрыты в табл. 24 и 25 приложения.
Условием независимости продольной и боковой составляющих вынужденного движения самолета является равенство нулю всех элементов
матриц Вбп, В„6, Вбп, В„6. Для симметричного относительно плоскости
ХОУ самолета это достигается в прямолинейном полете без скольжения.
Тогда векторное уравнение полного вынужденного движения самолета
(2.114) можно представить в виде двух независимых уравнений с новыми
значениями коэффициентов, приведенных в табл. 24 и 25 приложения:
хп (I) = Ап хп (I) + В* < (I) + В* IV (I) ;
у
х6 (I) = А6 х6 (I) + В б ^ (1) + Вб иб (I) .
(2. 127)
(2. 1 28)
Решения уравнений (2.127) и (2.128) имеют следующий вид:
хп(1) = фи(1)х„(0) + | Фп(1 _ Т) Вуп и*(
о
+ }ч»п(1-т)ВХ(т)<1т;
= Ф6(1)хб(0) + | фя(1 - т) В^ 14(т)оЧ +
о
+ } Ф б (1-т)В 6 и в б (т)с1т.
(2.130)
Таким образом, полное пространственное движение самолета можно
рассматривать как два независимых движения: продольное и боковое.
Контрольные вопросы
1. Каким образом получают уравнения собственного поступательного и вращательного движения самолета? Какие при этом делаются допущения?
2. Чем отличаются уравнения вынужденного движения самолета от уравнений
собственного движения?
3. В чем состоит идея методов малых возмущений и «замороженных коэффициентов»?
4. Линеаризуйте динамическое уравнение поступательного движения самолета
относительно траекторной оси ОУ К .
5. В чем заключается сущность метода пространства состояний? Объясните
физическую сущность элементов матрицы состояния полного пространственного
движения самолета.
6. Как формируются векторы входа по управляющим воздействиям и внешним
возмущениям?
7. Каковы условия разделения продольного и бокового движения?
8. Как получают уравнения вынужденного продольного и бокового движения?
60
Глава 3
ДИНАМИКА ПРОДОЛЬНОГО ДВИЖЕНИЯ
САМОЛЕТА
3.1. СТРУКТУРА ПРОДОЛЬНОГО ДВИЖЕНИЯ
Продольное движение самолета-это движение в плоскости симметрии
ХО2. Пусть исходным невозмущенным движением самолета является
прямолинейный установившийся горизонтальный полет. Тогда все силы
и моменты, действующие на самолет, взаимно уравновешены при отсутствии управляющих воздействий и внешних возмущений. Если к самолету
будет приложено управляющее воздействие или внешнее возмущение,
вызывающее вращение самолета вокруг оси О2 или смещение вдоль осей
ОХ или ОУ, то продольное движение самолета станет вынужденным,
а после снятия управляющего воздействия или внешнего возмущения-собственным. При этом продольное движение будет развиваться практически
независимо от бокового.
3.1.1. Виды продольного движения
Собственное продольное возмущенное движение. Рассмотрим собственное
продольное движение самолета, сформировавшееся в результате кратковременного отклонения руля высоты. Это приведет к появлению прироста
нормальной силы на горизонтальном оперении АУ, которая создаст на
плече Ьг 0 управляющий аэродинамический момент тангажа М25 согласно
(1.34).
Под действием этого момента самолет начнет поворачиваться относительно поперечной оси О2 и, следовательно, менять угол тангажа и
и угол атаки а. Увеличение угла атаки вызовет приращение нормальной
силы АУ, которая создаст стабилизирующий статический момент тангажа
по углу атаки Мш согласно (1.28), направленный на устранение появившегося приращения угла атаки. Под действием момента Мш самолет начнет
поворачиваться относительно поперечной оси О2 в обратную сторону
и угол атаки будет уменьшаться.
Вращение самолета относительно оси О2 вызовет появление демпфирующего момента тангажа М^ и момента тангажа М,^, обусловленного
запаздыванием скоса потока согласно (1.28), направленных против вращения самолета. Поэтому в тот момент, когда самолет возвратится к первоначальному углу атаки, угловая скорость тангажа со2 будет еще велика
и самолет проскочит это положение. Тогда приращение угла атаки станет
отрицательным. Направленное вниз приращение нормальной силы АУ
создаст кабрирующий момент и все три момента Мга, М^, М^ будут
тормозить вращение самолета. Когда опускание носа прекратится, момен™ Ми»,» М2й станут равными нулю, но самолет под действием стабилизирующего момента Мга вновь начнет поднимать нос.
61
Такой процесс повторится и после нескольких колебаний благодаря
действию указанных моментов самолет практически возвратится в исходное положение равновесия, т. е. к первоначальным углам атаки и тангажа. Этот процесс происходит довольно быстро, поэтому продольное
движение самолета по угловой скорости тангажа юг, углу атаки а и углу
тангажа и называют быстрым продольным. Если это движение к тому же
еще и быстро затухает, то его называют короткопериодическим.
Короткопериодическое движение происходит относительно центра масс
самолета без заметного изменения скорости и обычно заканчивается
в течение нескольких секунд.
Вынужденное продольное возмущенное движение. Рассмотрим вынужденное продольное движение самолета, сформировавшееся в результате
длительного отклонения руля высоты. Это приведет к появлению прироста
нормальной силы на горизонтальном оперении АУ и управляющего аэродинамического момента М 2 8 . Самолет будет реагировать на управляющее
воздействие появлением стабилизирующего момента тангажа по углу атаки
М20, демпфирующего момента тангажа М20) и момента тангажа, обусловленного запаздыванием скоса потока М2й. 'Вначале процесс будет развиваться аналогично рассмотренному процессу собственного продольного
возмущенного движения. Однако закончится он лишь тогда, когда после
нескольких колебаний стабилизирующий момент Мт уравновесит управляющий момент М 28 , что может произойти при новом значении угла атаки,
отличающемся от первоначального на угол Да и пропорциональном
отклонению руля высоты летчиком Д8В. При этом самолет вновь будет
сбалансирован и точкой приложения подъемной силы вновь станет центр
масс самолета. Рассмотренный процесс будет происходить довольно быстро, поэтому вынужденное продольное возмущенное движение самолета на
начальном этапе называют быстрым, а при наличии затухания-короткопериодическим.
Изменение угла атаки на величину Да вызывает изменение силы лобового сопротивления на величину Хаа согласно (1.10). Это, в свою очередь,
приводит к тому, что начинает меняться скорость самолета. Уменьшение
скорости на величину ДУ вызывает уменьшение подъемной силы на
величину ДУ а . Самолет начнет снижаться, увеличивая скорость. Колебательное движение самолета в вертикальной плоскости при практически
неизменном угле атаки, связанное с изменением скорости V, является
медленным продольным движением. Если это движение затухает, то его
называют длиннопериодическим.
Длиннопериодическое движение является движением центра масс самолета и обычно заканчивается в течение десятков или сотен секунд. Длиннопериодическое движение может проявиться не только при вынужденном, но
и при собственном продольном возмущенном движении. Однако в этом
случае оно не так явно заметно.
Изменение угла атаки приводит, кроме того, к изменению угла наклона
траектории на величину Д0. Таким образом проявляется продольное
траекторное движение самолета по высоте и пройденному расстоянию Ь.
62
3.1.2. Моделирование продольного движения
Продольное движение по первичным и вторичным параметрам. Анализ
структуры векторного уравнения собственного продольного движения самолета (2.110) показывает возможность его дальнейшего упрощения. Это
обусловлено тем, что первые четыре параметра вектора переменных состояния продольного движения хп (приращения угловой скорости тангажа
Дю2, углов атаки Да и тангажа До, а также скорости ДУ) не зависят от
последних трех параметров продольного движения (приращений угла
наклона траектории Д9, высоты ДН и пройденного расстояния ДЬ).
Поэтому вектор хп целесообразно разделить на два: вектор первичных
параметров состояния
]т = [Дсо2(1)Да(1)Ди(1)ДУ(г)]
(3.1)
и вектор вторичных параметров состояния
[х„2 (*)1Т = [АО (I) АН (I) ДЬ (I)] .
(3.2)
Тогда собственное продольное движение самолета по первичным параметрам описывается следующим уравнением:
*п1(1) = Ап1хп1(г).
(3.3)
Матрица состояния продольного движения самолета по первичным
параметрам
(3.4)
А„1 =
»8, а
а
у,,а
Уравнение (3.3) описывает собственное продольное возмущенное движение самолета, возникновение которого обусловлено начальными возмущениями Дсо°, Да0, До0 и ДУ°.
Собственное продольное движение самолета по вторичным параметрам
описывается уравнением
*„2(1) = Ап2хп2(1) + Вг;1и>;1(1),
(3.5)
где и^ (I)-вектор входа по управляющим воздействиям в виде изменения первичных
параметров (и^ (I) = х а1 (I)).
Матрица состояния продольного движения самолета по вторичным
параметрам
ае,е О О
0 0 0
(3.6)
63
Матрица входа по управляющим воздействиям первичных параметре
а
О
а
Н,а
Н,1)
0 0
0
(3-1
а
Н,у
а, „
Уравнение (3.5) описывает собственное продольное возмущенное
жение самолета, возникновение которого обусловлено начальными возь
щениями А0°, АН0 и АЬ°, а также вынужденное движение самолета
вторичным параметрам, вызванное изменением первичных параметров.
Быстрое и медленное продольное движение. Применим к уравнению (3.
преобразование Лапласа:
(Р1-Ав1)Хп1(р) = 0.
Характеристический определитель уравнения (3.8) имеет вид
(Р ~ ^„ш/
"^„о
~агаг,и
-а^
-аа,Шг
(Р - аа,а)
-аа,„
~аа,у
А(р) =
о
-\«,
р
0
(3.'
/-1
(Р- а у,у)
Раскрыв определитель и приравняв его нулю, получим характеристЦ
ческое уравнение
А1р4 + А"3р3 + А?р2 + А?р + А5 = 0 .
(3.11
Коэффициенты уравнения определяются следующим образом:
_
А п4 —
А
З= 12 - '
А.™ — —
а
а
г
а
уа а,У +
+
а
а
а
а
а,ш шг,а У,У ~' о,ш, У,о шг,У ~
~а /»->0)г г
тГла \ /т^ I 1='МЧ
/тГ*10!
Р (Мк г + М^КР^ + Рч) - (МКж
64
И
=
ау „а^а^ца,, у
+ Й$ + РХ, (Ру, + Р") •
(3-1 1)
Практика решения характеристического уравнения (3.10) показывает,
что оно имеет две пары комплексно-сопряженных корней:
А-1,2 = и±1У; Х.3>4 = ц±1Г|.
(3.12)
В этом случае общее решение уравнения (ЗЛО) имеет вид:
Асог (I) = Аш е"' (вш VI + <рш) + А^е1" (зт Щ + фШг) ,
Аа(1) = Ааех1(8ШУ1 + <ра) + Ааец'(8тг|1 + фп),
А9 (I) = А„ех1 (зш VI + Ф- ) + А;еи1 (вшЛ I + чО ,
(3-13)
АУ(1) = Ауех1(8ШУ1 + фу) + А'уец'(ш1Л* + Фу),
где постоянные \^, А^, фШг, «р^, Аа, А„, фа, фд, А^, А„, ф„, ф„, А у , А у , фу,
ФУ определяются из начальных условий.
Как видно из (3.13), собственное продольное возмущенное движение
самолета представляет собой наложение двух колебательных движений,
причем амплитуды колебаний этих движений определяются величинами
А^е*', А; е"', А^*1, А^', А^е*1, А;е^1, Ауе*1, А^.
Значения и и г) представляют собой круговые частоты; фШг, ф^, фа, ф^,, ф„,
Фи, фу, фу- сдвиги фаз. Периоды колебаний равны:
Т! =2тс/о; Т2 = 2я/л(3.14)
Исследование динамики продольного движения можно существенно
упростить, если выполняется условие разделения двух колебательных
движений, выделенных при решении характеристического уравнения. Условие заключается в существовании значительной разницы в абсолютных
значениях корней уравнения. Если абсолютные значения одной пары
комплексно-сопряженных корней значительно отличаются от абсолютных
значений другой пары комплексно-сопряженных корней, то решения уравнений и соответствующее им движение для одной лары корней можно
рассматривать независимо от решения уравнения и соответствующего им
Движения для другой пары корней.
Для того чтобы проверить выполнение условия, необходимо найти эти
корни. Для разложения характеристического полинома четвертой степени
на два полинома второй степени воспользуемся методом Линна:
4
3
2
р + А?р + АЗр + А?р + АВ =
= (р2 + 2ВгР + В0Нр2 + 2С1Р + С0).
3
Зак. 948
(3.15)
65
Коэффициенты уравнения имеют вид:
[
АП
А
ио
2
дп
1 —
2I
АП/
А?/
п
21 л
\ 3
I
м дп
Лп1 Э
А^\
А
1
А2
! ;
А П
^
(3.16)
"Г( А 1 _Ао)_А1( А 5 _А1)1'
IV АЗ/ АЗ\ А!/]
С, = ^(А5 - В?), С0 = (АЗ - ВЗ) - В^ (АЗ- В?).
Две пары комплексно-сопряженных корней определяются следующим
образом:
(3.17)
А-з.4= -С^УсГ-Со.
(3.18)
Практика расчетов показывает, что для самолетов ГА первая пара
корней по модулю более чем на порядок превышает вторую. Вещественная
часть комплексного корня характеризует степень затухания, а коэффициент
при мнимой части-частоту колебаний. Поэтому большим корням соответствует быстрозатухающее движение с большой частотой и малым периодом колебаний. Малым корням соответствует медленнозатухающее движение с малой частотой и большим периодом колебаний.
Быстрозатухающее продольное движение, соответствующее большим
корням характеристического уравнения, является короткопериодическим.
Медленнозатухающее продольное движение, соответствующее малым корням характеристического уравнения, является длиннопериодическим.
После нарушения опорного движения короткопериодическое и длиннопериодическое движения возникают одновременно. Однако сначала преобладает движение по углам атаки и тангажа, в то время как скорость;
почти не меняется. В дальнейшем заметны только колебания по скорости;
и углу наклона траектории.
Короткопериодическое движение-вращательное и связано с нарушением равновесия моментов тангажа. Длиннопериодическое движение связано с нарушением равновесия сил, действующих на самолет по продоль*
ной оси. Если равновесие моментов обычно наступает через несколько
секунд, то установление равновесия сил требует значительно большего
времени - десятков секунд. Это дает возможность рассматривать два движения раздельно. Если считать, что в короткопериодическом движении
скорость не меняется АУ = 0, то уравнение собственного продольного
короткопериодического движения принимает следующий вид:
66
х„Л1) = Апкхпк(1).
(3-19)'
Вектор параметров состояния продольного короткопериодического движения
[х™ (1)]т = [Аюг(1) Аа(1) АО (I)].
(3.20)
Матрица состояния продольного короткопериодического движения
А пи
ч» °
_
—
а,гаг
аа,а
О
О
О
(3.21)
Продольное длиннопериодическое -движение самолета целесообразно
рассматривать по первичному параметру АУ и вторичному параметру АЭ.
Если считать, что после окончания короткопериодических колебаний
Д(йг = 0 и Аа = 0, то уравнение собственного продольного длиннопериодического движения принимает следующий вид:
^пд (ч) — А ПД Х ПД (I) .
(3.22)
Вектор параметров состояния продольного длиннопериодического движения
[хпд(1)]т = [АУ(1)Ае(1)].
(3.23)
Матрица состояния продольного длиннопериодического движения
Г
"п —
"I
а
а
( у,а + у,«)
1
Ч,«
"
-
а«У
а
1
Г
у,у
а
^ "1
(3-24)
[ае,у-~ае,а]
Продольное траекторное движение самолета. Его целесообразно рассматривать по двум вторичным параметрам: АН и АЬ. Так как эти
параметры зависят только от параметров продольного длиннопериодического движения, то уравнение продольного траекторного движения можно исследовать как вынужденное движение, где в качестве управляющих
воздействий служат параметры длиннопериодического движения:
хпт (I) = В^ди^д (I),
(3.25)
где и
пд(0~ вектор входа по управляющим воздействиям в виде изменения параметров продольного длиннопериодического движения, причем и^д(1) = хпд(1).
Вектор параметров состояния продольного траекторного движения
з*
(3.26)
67
Матрица входа по управляющим воздействиям параметров продольного длиннопериодического движения
(3-27)
Уравнения собственного продольного короткопериодического (3.19),
длиннопериодического (3.22) и траекторного (3.25) движений позволяют
моделировать различные виды продольного движения.
3.2. УСТОЙЧИВОСТЬ ПРОДОЛЬНОГО ДВИЖЕНИЯ
Одним из основных свойств, определяющих возможность и безопасность полета, является устойчивость. Под устойчивостью самолета понимается его способность самостоятельно, без участия пилота, сохранять
заданный режим полета и возвращаться к нему после непроизвольного
отклонения под действием внешних возмущений. Понятие устойчивости
движения включает начальную тенденцию движения самолета после прекращения действия возмущения, а также качество процессов возвращения
самолета к исходному режиму. Для описания этих двух сторон устойчивости используют понятия статической и динамической устойчивости.
3.2.1. Характеристики устойчивости
продольного движения
Статическая устойчивость продольного движения. Она характеризует
начальную тенденцию, наличие момента тангажа, стремящегося возвратить самолет к исходному режиму. В соответствии со структурой продольного возмущенного движения продольную устойчивость самолета рассматривают при постоянной скорости и изменяющемся угле атаки, а также
при постоянном угле атаки и изменяющейся скорости.
Пусть самолет находится в прямолинейном установившемся полете.
Если в результате. воздействия внешнего возмущения и изменения угла
атаки на величину Да появляется аэродинамический момент Мш, направленный на сохранение угла атаки, то самолет является статически
устойчивым по углу атаки. Запас статической устойчивости самолета по
углу атаки удобно определять через положение координат центра масс
самолета х т и фокуса х р относительно начала средней аэродинамической
хорды крыла.
Фокус по углу атаки-точка Р, расположенная на линии пересечения
плоскости ОХ2 связанной системы координат с плоскостью симметрии
самолета, относительно которой момент тангажа остается постоянным при
небольших изменениях угла атаки (рис. 3.1). Фокус самолета косвенно
определяет координату центра давления аэродинамической силы планера
К А . Положения фокуса и центра масс самолета отсчитывается от носка
68
Рис. 3.1. Схема сил, действующих
на самолет с учетом фокуса по углу
атаки
средней аэродинамической хорды (САХ) крыла Ьа и выражается в долях
(процентах) ее длины:
"У
"V"
Хр = -2100%, Хт = -1100% .
Ьа
Ьа
(3.28)
Расстояние Хт называется центровкой самолета. Если центр масс самолета находится впереди фокуса (ХР > Хт), то при увеличении угла атаки
(Да > 0) на самолет будет действовать пикирующий момент ДМШ < О,
а при уменьшении (Да < 0) - кабрирующий момент ДМ2а > 0. В обоих
случаях самолет стремится самостоятельно восстановить исходный угол
атаки а и будет статически устойчивым.
Если центр масс самолета находится позади фокуса (ХР < Хт), то при
увеличении угла атаки (Да > 0) на самолет будет действовать кабрирующий момент ДМШ > 0, а при уменьшении (Да < 0)-пикирующий момент ДМШ < 0. В обоих случаях самолет стремится еще больше отклониться от исходного состояния равновесия и не обладает статической
устойчивостью по углу атаки.
Так как при постоянной скорости полета изменение угла атаки Да
сопровождается изменением аэродинамической подъемной силы ДУ а и
нормальной скоростной перегрузки
А Ч/
а
с
О А
Аас
О
5
дПу =
- у. *
и 29}
" ~ О ~ т§ '
то понятия «устойчивость по углу атаки», «устойчивость по коэффициенту
аэродинамической подъемной силы» и «устойчивость по перегрузке» имеют
одинаковый смысл. Последнее понятие получило большее распространение.
Основной характеристикой продольной статической устойчивости является степень продольной статической устойчивости по перегрузке стпполная производная коэффициента момента тангажа по коэффициенту
подъемной силы при фиксированном руле высоты в квазиустановившемся
криволинейном движении самолета в вертикальной плоскости с постоянной
скоростью.
Степень продольной статической устойчивости по перегрузке отражает
влияние взаимного положения центра масс и фокуса самолета, а также
собственного демпфирования самолета на его устойчивость:
ш
т
(3.30)
69
где
= хт
V
V
2т
(3.31)
Таким образом, самолет статически устойчив по перегрузке, если
х р > хт, или т% < О, или стп < 0. Демпфирование продольного движения
г
увеличивает статическую устойчивость по перегрузке, так как т™ < О
и пГ' < 0 (рис. 3.2).
Пример 3.1. Рассчитаем степень продольной статической устойчивости самолета
Ту-154 для различных условий полета. В первом случае самолет обладает предельно
передней центровкой, максимальной полетной массой, летит на малой скорости
и малой высоте: т =
98000 кг, хт = 18%САХ, Упр = 400 км/ч, Н = 2 км.
Тогда я = р0АУ2/2 = 6350 Н/м2, где р„ = 1,25 кг/м3, А = р„/р0 = 0,821 (на высоте
Н = 2 км), V = 11 1 м/с, сУа = С/я5 = 0,857, где 8 = 180 м2. Из графика тг = Г(су)
имеем т^у=- 0,345; а т*2=-13, ц = 2т/рн8Ь„ = 204, где Ьа = 5,28 м. Тогда
стп = т°у + т*г/ц = - 0,408.
Во втором случае самолет обладает предельно задней центровкой, минимальной
полетной массой, летит с большой скоростью на большой высоте: т = 60 000 кг,
хт = 32%САХ, Упр = 940 км/ч, Н = 12 км.
Тогда У = 260 м/с, А = 0,253, я = 10 680 Н/м2, су =0,312. Из графика тг =
= - 0,295; т*г=-15,8; ц = 400. Тогда ст„ = - 0,295 = Г(су) имеем
— 15,8/400 = — 0,334. Таким образом, степень продольной статической устойчивости
самолета меняется в зависимости от режима полета в довольно широких пределах от -0,408 до -0,334.
Под устойчивостью по скорости понимается способность самолета
сохранять заданную скорость полета и возвращаться к ней самостоятельно.
Продольная статическая устойчивость по скорости характеризует поведение самолета в установившемся
прямолинейном движении при постоянном угле атаки, или, что то же
самое, при постоянной нормальной
скоростной перегрузке.
Так как изменение скорости при
постоянной перегрузке сопровождается и изменением угла атаки, то
коэффициент момента тангажа будет
зависеть как от угла атаки, так и от
скорости полета (числа М). Тогда
устойчивость самолета по скорости
оценивается по полной производной
коэффициента момента тангажа по
коэффициенту подъемной силы, которая называется степенью продольРис. 3.2. Зависимость коэффициента ной статической устойчивости по скорезультирующего аэродинамического рости Сту при фиксированном руле
момента тангажа от коэффициента
высоты. В частном случае в устаноаэродинамической подъемной силы:
/-устойчивый самолет; 2- неустойчивый вившемся прямолинейном горизонсамолет
тальном полете
70
(3.32)
Если ау < 0, то самолет статически устойчив по скорости, при ау > 0 неустойчив. Выражение (3.32) показывает, что устойчивость самолета по
скорости возможна только' при наличии статической устойчивости по
перегрузке, когда т°у < 0 и ап < 0. Так как на докритических скоростях
та < 0 и (с1М/с!су ) < 0, то отрицательный знак ау сохраняется. При
дальнейшем увеличении скорости до критического числа М производная
тк становится отрицательной. Тогда второе слагаемой в выражении (3.32)
изменит знак и может оказаться больше первого слагаемого. Самолет,
обладающий статической устойчивостью по перегрузке, окажется статически неустойчивым по скорости (ст„ > 0).
Динамическая устойчивость продольного движения. Наличие продольной
статической устойчивости по перегрузке еще не гарантирует возвращения
самолета к исходному режиму полета. Теоретические и экспериментальные
исследования продольного короткопериодического движения самолета по
углу атаки показывают, что оно с достаточной точностью может быть
описано в виде затухающей синусоиды
Да(1) = А"е~ь.18т(ук1 + ф"),
(3.33)
где Ь к - коэффициент демпфирования продольных короткопериодических колебаний;
у к круговая
частота
продольных
короткопериодических
колебаний;
фк-
фазовый угол сдвига; А" - постоянная, определяемая из начального условия Да = а°.
Коэффициент демпфирования Ь, и круговая частота ук колебаний,
а также частота недемпфированных колебаний шк, определяемая выражением
'
(3-34)
являются характеристиками демпфирования самолета в продольном короткопериодическом движении.
Выражение (3.33) описывает колебательный затухающий процесс
(рис. 3.3). В начальный момент времени (I = 0) приращение угла атаки
Да0 = А" 8т фк и определяется массовыми, инерционными характеристиками самолета и характером возмущающего воздействия. При I > 0 амплитуда колебаний будет асимптотически затухать, определяясь сомножителем А°е~ь«'. Чем больше Ьк, тем с большей интенсивностью происходит
затухание.
На основании характеристик демпфирования определяются- основные
характеристики динамической устойчивости самолета в продольном короткопериодическом движении, по которым оценивают качество переходного
процесса.
71
Период собственных продольных короткопериодических колебаний-время между первыми двумя
максимальными значениями приращения угла атаки Да
Тк = 2тг/ук.
(3.35)
Частота собственных продольных короткопериодических колебаний-величина, обратная периоду
т-
ГК=1/ТК.
Рис. 3.3. Характеристики короткопериодического продольного возмущенного
движения самолета
(3.36)
Время затухания собственных
продольных короткопериодических
колебаний-промежуток времени,
по истечении которого отклонение угла атаки Да будет отличаться от его
конечного установившегося значения не более чем на 5% (амплитуда
колебаний при этом уменьшается в 20 раз):
*заТ = 3/П к .
(3.37)
Число собственных продольных короткопериодических колебаний до практически полного затухания
пЬт = йтД..
(3-38)
Наличие статической устойчивости по скорости также необходимое, но
недостаточное условие устойчивости движения по скорости. Длиннопериодическое возмущенное движение при статической устойчивости самолета по
скорости может быть затухающим при достаточном демпфировании воздушной среды, когда самолет совершает полет на небольших высотах. При
полете на больших высотах, когда демпфирующие свойства воздушной
среды ухудшаются, длиннопериодическое движение по скорости может
стать незатухающим.
Теоретические и экспериментальные исследования продольного
длиннопериодического Движения по скорости показывают, что оно, так же
как и короткопериодическое движение по углу атаки, с достаточной
точностью может быть описано в виде затухающей синусоиды
1 + фд),
(3.39)
где Ья - коэффициент затухания (демпфирования) продольных длиннопериодических
колебаний; у д - круговая частота продольных длиннопериодических колебаний;
9д-фазовый угол сдвига; Ад-постоянная, определяемая из начального условия
ДУ = V0.
Коэффициент демпфирования, круговая частота колебаний, частота
недемпфированных колебаний юд, определяемая выражением
ЮД = /ПД + У Д ,
72
(3.40)
являются характеристиками демпфирования самолета в продольном длиннопериодическом движении.
Колебательный процесс, описываемый выражением (3.40), аналогичен
процессу, представленному на рис. 3.3, только в ином масштабе времени
(десятки и сотни секунд). На основании характеристик демпфирования
определяются аналогично (3.34)-(3.38) основные динамические характеристики устойчивости самолета в продольном длиннопериодическом движении: период Тд, частота Гя, время затухания 1?ат и число п?ат собственных
продольных длиннопериодических колебаний.
3.2.2. Условия устойчивости продольного движения
Условия устойчивости .продольного короткопериодического движения.
Определим условия, при которых продольное короткопериодическое движение самолета оказывается устойчивым. Рассмотрим модель короткопериодического движения в виде уравнения (3.20). Применим к нему преобразование Лапласа:
( Р 1-А ПК )Х ПК (Р) = 0.
(3.41)
Характеристический определитель уравнения (3.39)
-аа>„а
А(р) =
О
Р- а а,а О
О
р
(3.42)
Коэффициент демпфирования продольных короткопериодических колебаний и частота недемпфированных продольных короткопериодических
колебаний имеют вид:
1
1
(3.43)
(3.44)
Корни характеристического уравнения
2
=О
(3.45)
определяют характер собственного продольного короткопериодического
возмущенного движения самолета
(3.46)
73
При со, > п? и о>к > О корни уравнения (3.45) будут комплексно-сопряженными, а собственное короткопериодическое движение - колебательным:
Тогда решение уравнения (3.41) может быть получено в аналитическом
виде:
Да(1) = А;е-
е-|Мвт(у1(1 + ф*) - ^' ...... •$ е~ ь -< ( — кт у,1 + соз у,1 )
С2,
(3.48)
где А^, А™., Ау, С"- постоянные, определяемые из начальных условий Да = а°,
Да = а°, До = о°, Дсог = <о°, Дю2 = ш° при I = 0; и, -круговая частота собственных
продольных короткопериодических колебаний; ср°, ф™«, ф^- фазовые углы сдвига
продольных короткопериодических колебаний.
С учетом того, что изменение вертикальной перегрузки связано с изменением угла атаки соотношением (3.29), получим
V0
Д п У а = — Р° к Аа.
(3.49)
&
Тогда
(3.50)
0
где А, = А„ V Р«к/§.
Необходимыми и достаточными условиями устойчивости опорного
собственного короткопериодического движения по критерию Гурвица являются следующие условия:
ь„ = 2г[Рг'ч -Ш * -Щ']>0;
г-'
к
п
^(3.50)'
При выполнении этих условий отклонения параметров Да, Дпу , Да>2
в процессе собственного продольного короткопериодического возмущенного движения будут затухать, стремясь к нулю. Затухание отклонения До
происходит несколько позднее, причем До стремится к некоторому отличному от нуля пределу. Следовательно, собственное короткопериодическое
движение самолета по отношению к опорным углу атаки, вертикальной
перегрузке, тангажу и скорости тангажа устойчиво. Причем при отсутствии
внешних возмущений по параметрам Да, Дп у и Дюг эта устойчивость
является асимптотической, тогда как по параметру Ди эта устойчивость
является неасимптотической. Следовательно, для возвращения самолета
74
к опорному значению угла тангажа Аи требуется вмешательство пилота
или автоматики.
Условия устойчивости продольного длиннопериодического движения. Определим условия, при которых продольное длиннопериодическое движение
самолета является устойчивым. Рассмотрим модель длиннопериодического
движения в виде уравнения (3.22). Применим к нему преобразование
Лапласа:
(р1-А пд )Х пд (р) = 0.
(3.52)
Характеристический определитель уравнения (3.52)
<я„\ ав,а/а(в1,о ~ ав,У
а
2
а
а
Р
а
= Р + 1>«,г,у( У,а + У,а)АЧ,а ~ У,уЗ Р +
а
+ V,» (аш„У ав,а/а<ог,а ~ ав,У ) = Р2 + 2Ьд Р + М Д •
(3-53)
Коэффициент демпфирования продольных длиннопериодических колебаний
П
д = ~ 2 Еасог,у(аУ,а + аУ,и)/аа>„а ~ а У,у] =
= ^[Р;ж(йХх + Я!? ж )/й» х -РХ к -Р?! к ].
(3.54)
Частота недемпфированных продольных длиннопериодических колебаний
ю
д - V аУ,и [аеог,У
* )].
(3.55)
Корни характеристического уравнения
Х 2 + 2Ь д Х + ю2 = 0
(3.56)
определяют характер собственного продольного длиннопериодического
возмущенного движения самолета:
*1.2 = ~ Ь„ ± УО>Д - Ь Д •
(3'57>
При Юд > Ьд и сод > 0 корни уравнения (3.56) будут комплексными
сопряженными, а собственное длиннопериодическое движение-колебательным:
^1.2=-Ь я ±1 > /в)„-Ь5.
(3.58)
Тогда решение уравнения (3.39) может быть получено в аналитическом
виде:
ДУ (1) = А у е -ь*' ап (уд 1 + фУ),
(3.59)
Ав (г) = Авд е - ь-1 зш (У„ 1 + Ф н ),
(3.60)
75
0
где А д , А д -постоянные, определяемые из начальных условий ДУ = V , ДУ = ДУ°,
А6 = А0°, ДЙ = Дб° при 1 = 0; ф^, ср^-фазовые углы сдвига; у д -круговая частота
собственных длиннопериодических колебаний.
Необходимые и достаточные условия устойчивости опорного длиннопериодического движения следующие:
ьд = - [р;ж (м^2 + й^)/й&х - (Р^к + р- )] > о,
(3.61)
(3.62)
=
При выполнении условий (3.61) и (3.62) отклонения параметров АУ и А0
в процессе собственного продольного длиннопериодического возмущенного движения будут затухать, стремясь к некоторому, отличному от нуля,
пределу. Следовательно, собственное длиннопериодическое движение самолета по отношению к опорной скорости и опорному углу наклона
траектории при отсутствии внешних возмущений является устойчивым, но
неасимптотически. Поэтому для возвращения самолета к опорным значе0
ниям V и 0° требуется вмешательство пилота или автоматики.
Условий устойчивости продольного траекторией) движения. Рассмотрим
модель продольного траекторного движения (3.25). Проинтегрировав это
уравнение, получим:
АН (О = а н в |Аесн = А» |е-ь.<8ш(у я 1 + ср<>)си + С н ,
ь
ь
АЬ(1) = а ь л |АУсп = А;|е- ««яп(у д 1 + ф У ) Л + С .
н
(3.63)
(3.64)
ь
При 1 -» оо, АН -» С , АЬ -» С . Следовательно, собственное продольное
траекторное движение самолета по отношению к опорной высоте и пройденному расстоянию при отсутствии внешних возмущений неасимптотически устойчиво. Поэтому для возвращения самолета к опорным значениям
Н и Ь требуется вмешательство пилота или автоматики.
3.3. УПРАВЛЯЕМОСТЬ ПРОДОЛЬНОГО ДВИЖЕНИЯ
Наряду с устойчивостью основным свойством, определяющим возможность и безопасность полета самолета, является управляемость. Под
управляемостью самолета понимается его способность выполнять в ответ
на целенаправленные действия пилота или автоматики любой предусмотренный в процессе эксплуатации маневр в любых допустимых условиях
полета, в том числе и при наличии возмущений. Сопоставляя понятия
устойчивости и управляемости, можно сделать вывод, что они противоположны друг другу. Устойчивость - способность самолета сохранять исходный режим, а управляемость -изменять его. Однако между этими свойствами существует и тесная взаимосвязь. С точки зрения пилота управляемость характеризует «послушность» самолета при повороте вокруг центра
масс. Перемещение центра масс в пространстве определяется маневренностью самолета. Как и для устойчивости, различают статическую и динамическую управляемость.
76
3.3.1. Характеристики управляемости
продольного движения
Статическая управляемость и балансировка продольного движения. Статическая управляемость продольного движения характеризуется значениями усилий на колонке штурвала и перемещениями колонки штурвала для
выполнения маневра в вертикальной плоскости. Усилия и перемещения
отсчитываются от определенных балансировочных усилий и перемещений,
обеспечивающих равновесие моментов, действующих на самолет относительно поперечной оси О2. Режимы полета самолета, в которых можно
считать действующие на самолет моменты уравновешенными, называются
балансировочными- Условием статической балансировки самолета является
равенство нулю результирующего момента тангажа Мк . С учетом выражений (1.27), (1.34) и (1.46), пренебрегая влиянием динамических и внешнего
моментов, а также моментом тангажа тяги, получим
М К г = М20 + М2а + Мг8_ + М2ф = 0.
(3.65)
В безразмерной форме с учетом того, что
М2а = У ( Х т - Х р ) = с У а (Х т -Х Р ),
(3.66)
выражение (3.65) можно записать следующим образом:
тго + с У а (Х Т - Хр) + т*-Д5в + т? Дер = 0.
(3.67)
Углы отклонения руля высоты 5В и стабилизатора ср, необходимые для
балансировки самолета в данном режиме полета, называются балансировочными. Их значения определяются из уравнения (3.67):
Аф =
,
(3.68)
-тго + с (Хр-Х Т )-т г -Д5 в
ь
.
1Щ-
(3.69)
Различают два вида продольной балансировки: при постоянной скорости и высоте полета и при постоянной нормальной (обычно равной единице)
перегрузке, но изменяющейся скорости.
Балансировочная зависимость 5 в (п у ) показывает, на сколько градусов
необходимо отклонить руль высоты для балансировки самолета в прямолинейном горизонтальном установившемся полете при сохранении нормальной перегрузки п у = I (рис. 3.4). Балансировочная кривая 5 в (п у ) для
устойчивого по перегрузке самолета имеет отрицательный наклон.
Балансировочная зависимость §В(У) показывает, на сколько градусов
и в каком направлении необходимо отклонить руль высоты в процессе
прямолинейного горизонтального разгона или торможения самолета на
заданной высоте, чтобы сохранить нормальную перегрузку пу = I (рис. 3.5).
Балансировочная кривая 5В(У) для устойчивого по перегрузке самолета
имеет положительный наклон.
77
Рис. 3.4. Балансировочные зависимости по перегрузке:
/-неустойчивый самолет; 2, 5-устойчивый
Рис. 3.5. Балансировочные зависимости по скорости:
/-неустойчивый самолет; 2- устойчивый
Обычно установкой стабилизатора на угол ф осуществляется грубая
балансировка самолета. Потребный угол установки стабилизатора выбирают таким, чтобы расхода руля высоты было достаточно для точной
продольной балансировки и управления продольным движением.
Потребные для балансировки самолета отклонения руля высоты, усилия
и перемещения колонки штурвала количественно характеризуют статическую продольную управляемость самолета. В качестве основных параметров используются градиенты перемещения колонки штурвала по перегрузке
х" у и скорости х^, градиенты усилий на колонке штурвала по перегрузке Р^'
и скорости РВ'.
Градиент перемещения колонки штурвала по перегрузке х"' показывает,
на какую величину необходимо переместить колонку штурвала для изменения нормальной перегрузки на единицу:
Дп„
(3.70)
Коэффициент штурвала по рулю высоты, показывающий, на сколько
градусов отклоняется руль высоты при перемещении колонки штурвала на
1 мм (при расчетах берется размерность 1 м), и градиент руля высоты по
= А5 в /Ах в ,
(3.71)
(3.72)
Градиент усилий на колонке штурвала по перегрузке РЦ' показывает,
какое дополнительное усилие необходимо приложить к колонке штурвала,
чтобы изменить нормальную перегрузку на единицу:
(3.73)
78
Градиент усилий на штурвале по перемещению, показывающий, как
изменяется усилие на штурвале при его перемещении на 1 мм,
Р*- = ДР„/Дх в .
Градиент перемещения колонки штурвала по перегрузке
,:,_|ь.
(3.74)
,3,5,
У статически устойчивого самолета градиенты хЛу и РЦу должны быть
отрицательными. Тогда для увеличения перегрузки Ап у > 0 и балансировки
самолета в новом режиме пилот должен отклонять колонку штурвала на
себя Дх„ < 0 и прикладывать тянущие усилия ДРВ < 0, а для уменьшения
перегрузки -наоборот. Такое управление будет нормальным, естественным
для пилота. Если градиенты х,у и РЦу слишком велики по абсолютной
величине, то самолет будет тяжел в управлении при выполнении интенсивного маневра. Если же х"у и Р^у очень малы, то самолет будет строгим
в управлении и возможны непроизвольный вывод самолета на недопустимо
большие перегрузки или раскачка самолета.
Аналогичным образом определяются градиенты перемещения колонки
штурвала по скорости х,' и усилия на колонке штурвала по скорости РУ.
Требуется, чтобы х в > 0 и Р^ > 0. Тогда для увеличения скорости (ДУ > 0)
и балансировки самолета в новом режиме пилот должен отклонить колонку
штурвала от себя (Дхв > 0) и прикладывать толкающие усилия (ДР„ > 0).
Такой характер воздействия на колонку штурвала является нормальным,
естественным для пилота.
Пример 2. Рассчитать градиенты перемещений и усилий на колонке штурвала
для исходных данных примера 1. В начале полета из графика т^« = Г(М) имеем
т8„ _ _ 0,0135. Для создания прироста перегрузки Дп у = 1 отклонение руля высоты
5|> = - су оп/т^ = - 25,9°. Тогда х^у = 5>/1ст.. = - 231 мм, где к ш в = 0,112;
РВ> = хЦу Ра*» + Р„ = 318 Н, где Р*« = 1,2 Н/мм, Р0 = 40 Н.
В конце полета т^ = - 0,0115, 8°у = 9,05, х> = - 81 мм,-Р> = 137 Н.
Таким образом, характеристики управляемости самолета меняются в зависимости от режима полета в довольно широких пределах: хЦу от — 231 до — 81 мм,
Р;> от 318 до 137 Н.
Динамическая управляемость продольного движения. Хорошие статические характеристики продольной управляемости самолета еще не гарантируют хорошего качества процесса управления, так как пилоту важен сам
характер изменения перегрузки во времени. Исследование реакции самолета на ступенчатое отклонение руля высоты дает объективную оценку
динамической управляемости продольного движения. Теоретические и
экспериментальные исследования продольного короткопериодического
движения по перегрузке показывают, что оно с достаточной точностью
может быть описано в виде скачкообразной затухающей синусоиды
Ап (I) =
= (Дп Уа ) уст 11 -- %-Мап<у
-Мап<ужж1 +
+ ср^а)
ср^а) ,
1_
V,
^
(3.76)
где (Дпу )уст - установившееся значение перегрузки; со, -частота недемпфированных
продольных короткопериодических колебаний; <р°уа-фазовый угол сдвига.
79
Выражение (3.76) описывает скачкообразный колебательный затухающий процесс (рис. 3.6). В начальный
момент времени 1 = 0, Ап у = 0. При
I > 0 перегрузка устремляется к новому значению Ап у уст и достигает
сначала максимального значения
ДпУаП1а>[, а затем будет асимптотически затухать, определяясь сомножи-
0,05йПуа1/ст
телем —-е^ь-1. чем больше п к , тем
интенсивнее ее затухание.
На основе выражения (3.76) определяют основные показатели динамической управляемости самолета в
продольном движении, по которым оценивают качество переходного
процесса.
Время срабатывания 1"р минимальный промежуток времени, по истечении которого величина Ап у достигнет значения Ап у у с т .
Время затухания собственных продольных короткопериодических колебаний по перегрузке промежуток времени, по истечении которого отклонение перегрузки Апу будет отличаться от ее установившегося значения
Ап у УС1 не более, чем на"50/о.
Относительное превышение перегрузки при достижении своего перв;6го
максимального значения
Рис. 3.6. Динамические характеристики
продольной управляемости
- / Ч д У С 1=е
V, _
(17?)
Ап у уст
а
Основные показатели статической и динамической управляемости самолета нормируются нормами ЕНЛГС. Например, градиенты Р"у и х"у не
должны превышать 100 Н и 50 мм соответственно, время срабатывания 1ср
4 с, а относительное превышение перегрузки Ай у ^ 0,3.
3.3.2. Моделирование управляющих воздействий
в продольном движении
Передаточные функции самолета в продольном короткопериодическом
вынужденном движении по управляющим воздействиям. Управляющими
воздействиями, наиболее существенно влияющими на параметры продольного короткопериодического движения, являются отклонения рулей высоты А8В, органов управления подъемной силой А6 у и органов управления
тягой А5 р . Рассмотрим модель продольного короткопериодического вынужденного движения самолета при наличии управляющих воздействий
(3.78)
80
Вектор-столбец входа по управляющим воздействиям в продольном
короткопериодическом движении
*)
А5у(1)
Д6р(1)].
(3.79)
Матрица входа по управляющим воздействиям в продольном короткопериодическом движении
В* =
а
8.
(3.80)
Дополним уравнение состояния (3.78) уравнением выхода
Упк(1) = Спкхпк(1),
(3.81)
где упк(1)-вектор-столбец выхода в продольном короткопериодическом движении;
Спк-матрица выхода в продольном короткопериодическом движении.
Пусть вектор выхода упк(1) совпадает с вектором переменных состояния
хпк(1). Тогда С пк = I, где I-единичная матрица одинаковой размерности
с вектором хпк(1;).
Уравнение выхода (3.81) устанавливает однозначное соответствие между переменными состояния и выходными переменными. Применим к уравнениям (3.78) и (3.81) преобразование Лапласа:
х др) = А ПК Х П » + хпк(0) + в*, ииР),
Р п
У пк (р) = 1ХпДр),
(3.82)
откуда, исключая Х пк (р) и полагая Х пк (0) = 0, найдем
Определим матрицу передаточных функций самолета в продольном
короткопериодическом движении по управляющим воздействиям как отношение преобразования Лапласа вектора выхода Упк (р) к преобразованию
Лапласа вектора входа 1Лк(р) при нулевых начальных условиях:
^к(р) =
= I (р! - А,,,)"1 В*. = (Р1 - А,,,)'1 В>;к = Фпк(р) В^. (3.84)
Переходная матрица состояния продольного короткопериодичёского
движения самолета
Ф пк (р) = (р! — А^)" 1 = (Ф пк (р))~ 1 .
(3.84)
Элементами матрицы \УПК (р) являются передаточные функции самолета
по соответствующим параметрам вектора выхода Упк(р), совпадающего
в рассматриваемом случае с вектором переменных состояния продольного
81
короткопериодического движения Хпк(р), на управляющие воздействия
(3.85)
Элементы матрицы \У„к(р) определяются по отношению к «отрицательным» отклонениям А8 В , А8 У , А8 р :
ЛЛЛ
I ПI
Л/Л
^ГЧ^
(р) = Л8_(р)'
ЛГЛ
1Г\\
.
В \Г/
*-*Уу \^^/
(3-86)
^Л1/р \]^/
Это обусловлено, во-первых, принятым направлением отсчета углов
отклонения органов управления, во-вторых, возможностью показать в явном виде отрицательные обратные связи, возникающие в процессе управления самолетом. Для находения переходной матрицы состояния воспользуемся следующей формулой:
где |Фп„(р)|-определитель матрицы XV*,(р) = А(р), полученный в выражении (3.42).
Присоединенная матрица определяется через алгебраические дополнения определителя А(р):
Р (Р - аа,а)
(3.88)
Тогда переходная матрица состояния
Р
(РА(р)
Ф„,(Р) =
Р .
Л(Р)'
1
А(Р)'
82
- а„
А(р)
_Р
(РА(р)
1
а,,.., а„
А(р)
(3.89)
Р
^
Матрица передаточных функций самолета в продольном короткопериодическом движении имеет вид:
а
А(р) С ш
а,шг
А(р) [»•(Р-ао,а)
•аи,ю *аю ,а 1-1
г
г
(3.90)
Определим характеристики матрицы передаточных функций.
Время недемпфированных продольных короткопериодических колебании
Т =
1
= . .
(3.9„
к2Р
Относительный коэффициент демпфирования продольных короткопериодических колебаний
а
а,а/ •у ашг,ш, аа,а
а
а,<ог ' ашг,а
СОИ
(3.92)
Коэффициент усиления по угловой скорости тангажа при отклонении
руля высоты
— о. р,а
МК
Р
(3.93)
- аяаа -
83
Постоянная времени
Т9 =- — = —.
(3.94)
рЦ
а
^ у,
а,а
Коэффициент усиления по угловой скорости тангажа при отклонении
органа непосредственного управления подъемной силой
а
а,8, ' аШг>а - а § • а^
х
Яш ,а) -я
-Я
а
а
а,а
а,ш
а
г
г
а
г
-Я
ш»а
Постоянная времени
Ту =
-
= —^.
(3.96)
Коэффициент усиления по углу атаки при отклонении органа непосредственного управления подъемной силой
х
а
4' =
а„8, ~ аа,ш, ~~ аа,5, ~ ага1,ш1
^У^к*
=
2
.
(3.97)
Постоянная времени
Т уа =
:
—
198
( >
=-~--
Коэффициент усиления по угловой скорости тангажа при отклонении
органа управления тягой
:=,<! /\~я$о
"сог,(ог а а д
"а,юг
<вг,и
тС~&^х \
С4 в \~Я®"
^Г
Постоянная времени
ао,„5р
——•
Тр =
а
Я'к'.
=
а,8 р - а Шг ,5 - ашг,8р'а«.«
Р
г=,а
,тГ~мЬ
М
уД К, +
:
»~~»И
М
г
\
.
(3.100)
1='ОГ.»-жС1
К ) ~ р у^ М К,
Коэффициент усиления по углу атаки при отклонении органа управления тягой
а
а
' аШ - а ' а
'^к>г,®г аа^а
а
а,со1
Постоянная времени
Тра=
84
—
а
шг,а
р
Мк + Р ( М + М^)
•
(ЗЛ01)
Т а б л и ц а 3.1
Д6
Д8„
Лх„. Дй
XV (р)
XV (р)
Да
'Дю^
' " Д а (Р) = -
XV
Дш,
Д8
Д8.
Да
,Д6,
'Ли
"
^А«Р
"Ди
'Да•(Р) =
,Д6Г
'Да'
Тогда передаточные функции с учетом обозначений (3.91) -(3.92) сведем
в табл. 3.1.
Передаточные функции самолета в продольном длиннопериодическом
вынужденном движении по управляющим воздействиям. Управляющими
воздействиями, наиболее существенно влияющими на параметры продольного длиннопериодического движения, являются отклонения органов управления продольной силой А8 Х , подъемной силой А5 у и тягой А8 р .
Рассмотрим модель продольного длиннопериодического вынужденного
движения при наличии управляющих воздействий
хпд (I) = Апд хпд (1) + ВХд иХд (1) .
(3. 102)
Вектор-столбец входа по управляющим воздействиям в продольном
длиннопериодическом движении
[ЧпдШ т = [А6х(1) А6У(1) А5р(1)].
(3.103)
Матрица входа по управляющим воздействиям в продольном длиннопериодическом движении
V»
О
а
У,5„
(3.104)
Дополним уравнение состояния (3.102) уравнением выхода
(3.105)
85
где упд(1)- вектор-столбец выхода в продольном длиннопериодическом движении,
совпадающий с вектором переменных состояния хпд(1).
Определим передаточную матрицу самолета в продольном длиннопериодическом движении по управляющим воздействиям XV Лд (р) при нулевых
начальных условиях следующим, образом:
(3.106)
где Фпд(р)~ переходная матрица состояния продольного длиннопериодического движения самолета.
Элементами матрицы \У*Д (р) являются передаточные функции самолета
по соответствующим параметрам вектора выхода Упд(р), совпадающего
с вектором переменных состояния продольного длиннопериодического
движения хпд(р). Причем элементы матрицы \У^д(р) определяются по
отношению к отрицательным отклонениям А8х(р), А&у(р), А8р(р):
' ДУ \Р) =
< ДУ 1К1 =
'де ЧР; =
ДУ \Р) —
А5 х (р)'
АУ(р)
А0(р)
' ле V?; =
'А§ р (р)'
А6(р)
А5 у (р)'
(3.107)
~А5 х (р)'
А9(р)
" де (Р> =
А8 у (р)'
А5 р (р)Передаточная матрица самолета в длиннопериодическом движении
1
1
1
, (3.108)
{р —
~ ао
2
ГаШ1,у
-|
я
"" аа„-
—
у,и - ав,а - ае,и .
=Р
АПД(Р) =
' а«1,а
'
Введем следующие характеристики.
Время недемпфированных длиннопериодических колебаний
1
1
V =
1
(Щ -Ш)
в
(3.109)
86
Относительный коэффициент демпфирования длиннопериодических колебаний
„
.
г
„
(аУ,а ~ а У,и^ ~ аУ,У ( ч / ЯУ,и ~
.
г
1ав,а ~~ а9,у] ~ '
(И? -ЭД? )
= -- Ра \. ,
х
Р
9
Р«
"
г
.... _ ^1
(М^г -МП
м
г
_ гр^ . Р > (
у
}
'
~-
д
Коэффициент усиления по скорости в длиннопериодическом движении
при отклонении органа управления продольной силой
(ЗЛИ)
Коэффициент усиления по скорости в длиннопериодическом движении
при отклонении органа управления подъемной силой
а
У,и
8,8 а У,„
Г а««.у
а
Р
1
е,а- а 9,У
I- а
,
у-рх,
•
(3.112)
-^
Коэффициент усиления по скорости в длиннопериодическом движении
при отклонении органа управления тягой
а
а
е,а - е,
Коэффициент усиления по углу наклона траектории в длиннопериодическом движении при отклонении органа управления продольной силой
.
,,
— = --.
Р
5Х
хк
(3.114)
87
Т а б л и ц а 3.2
АУ А5
XV (р)
Д5
Д8
де
48
Д8
,
р _ , ,
+ 9Т
21 у Ч у Р + '
Коэффициент усиления по углу наклона траектории в длиннопериодическом движении при отклонении органа управления подъемной силой
(ау,а - ау,„
[>
*м „(й^-я")-)
Р
+ Р
- Р -
I-
у
у
м?
у
^
|0>у|
а е > а -а 9 ; у
(3.115)
Коэффициент усиления по углу наклона траектории в длиннопериодическом движении при отклонении органа управления тягой
(3.116)
Постоянная времени
1
Т' =
(3.117)
-(а у , а -а У ; 1 ) )-а у _ у
•*(ог,а
Передаточные функции самолета в длиннопериодическом движении по
управляющим воздействиям представлены в табл. 3.2.
Передаточные функции самолета в полном продольном вынужденном
движении на управляющие воздействия. Рассмотрим модель полного продольного движения самолета при наличии управляющих воздействий
хп(1) = А п х п (1) + В>Х(1).
(3.118)
Найдем изображение по Лапласу вектора параметров продольного
движения самолета
Х„(р) = \У>;(р)Щ(р),
(3.119)
где XV* (р) = (р! — А п ) ' В* -передаточная матрица самолета в полном продольном
вынужденном движении на управляющие воздействия, элементы которой определяются по отношению к отрицательным отклонениям вектора управлений 1)^(р).
Определение передаточной матрицы XVI; (р) связано с обращением матрицы (р!-Ап), что при размерности этой матрицы (7 х 7) представляет
собой довольно трудоемкую задачу и в аналитическом виде практически не
применяется. Поэтому воспользуемся некоторым упрощением процедуры
получения передаточных функций с помощью уже полученных результатов
для короткопериодической и длиннопериодической моделей движения.
Рассмотрим процедуру получения передаточных функций по отклонению руля высоты Д5В. Передаточные функции самолета в короткопериодическом движении \УДт"г(р), ^Да'(р) и \Уд„'(р) известны и определены в табл.
3.1. Если определить передаточную функцию \УДд(р), то
^де-(р) = \Ор)^-(Р).
(3.120)
Передаточная функция ^Дга' (р) находится из следующих соображений.
В короткопериодическом движении Да ^ Аи — А0, поэтому из второго
уравнения (2.111) можно получить
Дб = аа,а(Де-Д1>),
(3.121)
отсюда
(3.122)
Р - аа,а
Тер + 1
Следовательно,
8
лк
^•(р)
к<»,'
=
.
2
[Т^р
+
2ТД
р+1]
Р
а
(3.123)
Аналогичным образом получают передаточные функции самолета по
углу наклона траектории на отклонения органов управления подъемной
силой Д5у и тягой Д5р в короткопериодическом движении:
.
де' (Р) = Д6
:
- = - ,
(3.1 24)
Так как изменение величины А6 происходит при отклонениях А5 Х , А5 у ,
А5 р и в длиннопериодическом движении согласно передаточным функциям
(см. табл. 3.2), суммарные передаточные функции самолета по углу наклона
траектории принимают вид, приведенный в табл. 3.3.
89
Т а б л и ц а 3.3
Д6
XV (р)
1;5в
Д6„
В
^Д9 (Й- р [ т , р 2 +2 т ^ р + | ]
8
К *
Д5Х
^
Ав(Р)
Д9
г
~ р | Т у р + 2Ту§ур+1]
у
Д8У
А5Р
.
+ 1)]1се (Твр+ 1)
Дв (Р)
'
^
Д<)ГР
2
"р[Т р
2
2
+
2
2ТДаР+ 1][Т р + 2Т у ^ Р +1]
_
Р^14ч/(ТеР+1)]1^
2
2
2 2
р[Т ,р + 2Т а ^ аР + 1][Т р + 2Т у ^р+1]
Передаточные функции самолета в короткопериодическом движении по
высоте получим с учетом того, что приращение высоты связано с приращением угла наклона траектории следующим образом:
а
где а н _ е = V 0 .
Отсюда
(3.126)
н,еА6,
а
н,в
Д
(3.127)
Следовательно,
8
'
(3.128)
Аналогичным образом получим передаточные функции самолета по
высоте на отклонения А8у и А6 р с учетом того, что изменение А6
происходит как в короткопериодическом, так и в длиннопериодическом
движении. Эти передаточные функции сведены в табл. 3.4.
Для получения передаточных функций по скорости воспользуемся уравнением длиннопериодического движения (3.22), выразив из него передаточную функцию • самолета по углу наклона траектории:
(3.129)
Р90
-(а У,а
ТвР+1
а
у,1>
Гашу
1
^У,а т »У,1) )
а
(
У
*
1у,У 1
шг,а
Следовательно,
ШД8р/ ч
ЛУ д у (р)
Ш Дв / Ч н, Д8,,, ч
^ д у ( Р )\У д в ( Р )
Ь^бвьвуо
*-Ю**-УУ
р2ГГ2р2 + 2 Т в 5 а р + 1 ] С Г , р + 1 ) -
/11114
(3.131)
ПеРедаточные функции самолета по скоРости на управляющие воздействия Д8 ,
Д5у и Д8р получены аналогично и сведены в табл. 3.5.
Т а б л и ц а 3.4
№(р)
Д5
ибо УV 0
?
К(В
«,Д5„Ггл
Д8В
лн№)
Р
АХ
-IV До х Сп1
А8Ж
1с 5? V
®
Ан1И
р[Т 2 Р 2 + 2Т у ^р+1]
ДН
Д8у
А8„
^Дву(о)
ЛН
[Т 2 р 2 + 2ТАР+1]
№1Ч/СГвР + 1)] 1с «У (Пр + 1) V"
Р [Т^Р2 + 2Та^аР + 1] [Т2р2 + 2Ту 5 У р + 1]
№ш^а,Ч/(ТвР+1)]^^°
«,Д8.,_ч
р[Т 2 р 2 + 2Т а ^ а р + 1][Т2 р2 + 2Ту^р + 1]
Т а б л и ц а 3.5
Д6
Д8В
А8Ж
ДУ
Д8у
Д8Р
IV (р)
1с8в1с8
И7Д8й (а\
АУ
л*
"
,уд8,,м
2
2
2
Р [Т р + 2 Та^ар + 1] СГ{, р + 1)
^уД6х /рЛ
4У
*<*г\
2
^р^9
В
V
"' Р[Т Р + 2Т у ^ у р + 1]П> + 1)
оф^/сгвр + ш^уь;
^ №> Р [Т2р2 + 2Т у ^ у р + 1] [Тур2 + 2Т у ^ у р + 1]
^*л ( )
[^^ р и ./(ТеР+ШЦ<
А
2 2
" ^ "" р[Т р + 2Т а ^ а р + 1][Т 2 р 2 + 2ТУ^Р + 1]Щр+ 1)
91
2
г
Т
/а. п
Р +
* *•9Т»
'а
|
V
ТеР+1
\
РИС. 3.7. Структурно-динамическая схема управления продольным траекторным
движением
Передаточные функции самолета по пройденному расстоянию получены из
уравнения продольного траекторного движения (3.25):
(3.132)
где аь,у = 1.
Отсюда
(3.133)
Следовательно,
(3.134)
Передаточные функции самолета по пройденному расстоянию на управляющие
воздействия Д5„, А6у и А5р сведены в табл. 3.6. На рис. 3.7 показана структурно-динамическая схема управления продольным траекторным движением.
Реакция самолета на ступенчатые отклонения органов управления в
продольном короткопериодическом движении. Она зависит от его динамических характеристик, а также от характеристик управляющих воздействий.
Маневр самолета в продольной плоскости совершается энергичным
отклонением руля высоты Д8В, органа управления подъемной силой А8у или
органа управления тягой Абр. При этом закон изменения А5В, Д8у и А§р
близок к скачкообразному, т.е. ступенчатому. Рассмотрим реакцию само92
лета на ступенчатое отклонение руля высоты А8В. На этапе короткопериодического движения формируются новые значения угловой скорости
тангажа (Аюг)уст, утла атаки Аа у с т и нормальной перегрузки Диу уст :
Дауст = А58 11т
Д5
.>
Дп у у с Т = Абв Нт \У|« (р)
(3.135)
Р) = П'„уаА5в.
Коэффициент усиления по нормальной перегрузке при отклонении руля
высоты
0
5
к»
V
= —Р
(3.136)
Реакция самолета на единичное изменение Д6В(1) = 1 (I), изображение
которого по Лапласу Д8В (р) = -, описывает переходную функцию, которая
1
полностью определяется передаточными функциями \ У ™ в ( р ) = -,
<°г
р
Т а б л и ц а 3.6
Д5
XV (р)
Д8
\^8*(р) = -
дь
Дб
[ТуР2
•р(р) = .
1][ТуР2
93
п" (Р)- Д
ля
параметров короткопериодического движения по-
лучим:
(ЗЛ37)
Апуа(р) =
Для оценки характеристик продольной устойчивости и управляемости
самолета особенно важен переходный процесс по нормальной перегрузке.
Перейдем от изображения Апуа(р) к оригиналу:
Дпуа(0 =
п
Так как передаточные функции по углу атаки и нормальной перегрузке
отличаются только коэффициентами усилений, то переходная функция для
угла атаки Да(1) будет иметь аналогичный вид.
Определим динамические характеристики устойчивости и управляемости самолета в продольном короткопериодическом колебательном движении при отклонении руля высоты пилотом.
Период собственных колебаний самолета
Частота собственных колебаний самолета
2яТ„
(3.140)
Время переходного процесса до практически полного затухания, когда
отклонение регулируемого параметра (например, Ап уа и Да) будет отличаться от его конечного установившегося значения (Апу уст, Аа уст ) не
более чем на 5%:
ЗТ
I"
(3141)
"•зат ~^
= г
•
(^.1-п^
^а
Число колебаний до практически полного затухания
(-к
94
Т
/1 _
(3.142)
Относительное превышение нормальной перегрузки при достижении ею
первого экстремального значения
=
V"**
(3.143)
Время срабатывания - время первого выхода регулируемого параметра
движения на его установившееся значение (ДпУаУСТ)
я — агскш V/! — & 2
(3.144)
Иногда дополнительно к показателям (3.1 39) -(3.1 44) рассматривают
изменение амплитуды колебаний за один период, время уменьшения
амплитуды вдвое и т.д.
Рассмотрим реакцию самолета на ступенчатое отклонение органа
управления продольной силой Д8у. Установившиеся новые значения
параметров короткопериодического движения имеют вид:
Дсогуст = Д8У Шп \\^2(р) = (1с* + 1с^г)А6у,
р-О
Аа у с т = А6 у Шп \У^(р) = (к*; а + 1#)Д8У ,
(3.145)
ДпУаУСТ = А5УУ Ит
Р-.О
V
Переходные функции и характеристики продольной устойчивости
и управляемости при отклонении А5 у определяются аналогично рассмотренным функциям и характеристикам при отклонении Д6„.
Реакция самолета на импульсные отклонения органов управления в
полном продольном движении. Изменение траектории полета самолета
в продольной плоскости осуществляется кратковременным отклонением
руля высоты А5„, органов управления продольной силой Д5„ и подъемной
силой А6у, а также органа управления тягой А5р. При этом закон изменения
А5В, Д8Х, А6 у и А8 р близок к импульсному. Рассмотрим реакцию самолета
по траекторным параметрам на импульсное отклонение руля высоты А8В.
По окончании короткопериодических и длиннопериодических колебаний
сформируются новые значения угла наклона траектории А6 уст и скорости
ДУ УСТ :
Двуст = Д5„ Шп {р^дв'(Р)} = к^Д6„,
р-О
ДУ УСТ = А5В Шп {Р^ду'(р)} = Ь»,4А8..
(3.146)
р-О
95
Высота полета ЛН при этом будет медленно изменяться, так как
в знаменателе передаточной функции \УдН"(р) имеется квадрат оператора
Лапласа р2. При импульсном отклонении Д5Х сформируется новое значение
высоты
х
ДНУСТ = Д5Х Ит {р АУ дн (р)| = *е' V А5Х .
(3. 147)
р^О
При импульсном отклонении Д5у:
А6УС1 = Д8У Нт
р
"°
ДУУС1 - Д5у 11т { р \О (р)} = (к*' + к^2) к^к« Д5у .
(3.148)
При импульсном отклонении Д5р:
Ав уст = (к^ + к^ г )к^Д5 р ,
,
, .
(3.149)
Переходные процессы характеризуются переходными функциями. Качество переходных процессов определяется характеристиками устойчивости
и управляемости. Аналогичным образом возникают переходные процессы
при отклонении пилотом органа управления по гармоническому закону.
3.4. ВНЕШНИЕ ВОЗМУЩЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ
3.4.1 . Эксплуатационные факторы в продольном движении
Влияние эксплуатационных факторов на продольную устойчивость. Сте-
пень продольной статической устойчивости по перегрузке зависит в
основном от относительных координат фокуса х р и центра масс самолета
хт (центровки). Положение фокуса определяется конструктивными особенностями самолета, конфигурацией, числом М полета, высотой, скоростью
и т.д. Положение центра масс определяется размещением пассажиров
и груза на самолете, равномерностью выработки топлива и т. д.
Эксплуатационный диапазон центровок обычно ограничивается предельно передней х пп и предельно задней х пэ . Для различных типов самолетов этот диапазон колеблется в пределах 15-35%. Согласно требованиям
ЕНЛГС запас продольной статической устойчивости по перегрузке (хр — хт)
для транспортных самолетов должен быть не менее 10%. Он устанавливается из условия обеспечения безопасности полетов на случай воздействия
ветра и возможных ошибок пилотирования на наиболее сложном в отношении сохранения устойчивости режиме полета -уходе на второй круг.
При малых запасах устойчивости самолет недостаточно сопротивляется
изменению угла атаки и медленнее восстанавливает исходное положение
96
равновесия. Он становится более чувствительным к отклонениям руля
высоты, и неосторожное отклонение колонки штурвала пилотом может
вывести самолет за пределы установленных ограничений по углу атаки
и перегрузке.
По мере уменьшения центровки статическая устойчивость самолета по
перегрузке увеличивается, что требует от пилота больших перемещений
колонки штурвала. При этом может оказаться, что отклонения руля
высоты будет недостаточно для балансировки продольных моментов,
действующих на самолет. Смещение центра масс вперед приводит также
к увеличению частоты собственных продольных короткопериодических
колебаний.
Влияние числа М полета проявляется в перемещении центра давления
и фокуса самолета назад при приближении скорости полета, соответствующей критическому числу М. Это приводит к резкому увеличению запаса
статической устойчивости по перегрузке и появлению пикирующего момента.
Влияние выпуска закрылков проявляется в увеличении подъемной силы
крыла. При этом центр давления и фокус самолета смещаются вперед
и запас устойчивости по перегрузке, как правило, уменьшается. Выпуск или
уборка шасси изменяют центровку самолета и аэродинамический момент
тангажа вследствие прироста силы лобового сопротивления, приложенной
ниже центра масс самолета. Первый фактор вызывает появление кабрирующего момента, а второй-пикирующего, которые почти уравновешивают друг друга и на запасе устойчивости по перегрузке не сказываются.
Влияние работы силовой установки на устойчивость самолета по перегрузке определяется местом установки двигателей, создаваемой двигателями дополнительной подъемной силой крыла, изменением скоса потока
у горизонтального оперения, режимом работы двигателей и наличием
дополнительных сил, возникающих при косой обдувке двигателей. Влияние
упругих деформаций конструкции крыла и фюзеляжа проявляется в том,
что при увеличении скоростного напора появляются их колебания, что
приводит к изменению аэродинамических характеристик и характеристик
продольной устойчивости.
Перечисленные факторы, действуя одновременно, существенно изменяют как статические, так и динамические показатели продольной устойчивости. Затрудняется пилотирование самолета, снижается комфортность
пассажиров и экипажа. Предельные проявления факторов могут сказаться на безопасности полетов. Поэтому обеспечение заданных показателей
продольной устойчивости в течение всего полета возлагается на автоматические средства улучшения продольной устойчивости. Решается эта
задача автоматическим отклонением руля высоты и стабилизатора в
функции угловой скорости тангажа, угла атаки, нормальной перегрузки,
скорости, высоты, числа М полета и т.д.
Влияние эксплуатационных факторов на продольную балансировку и
управляемость. Основными эксплуатационными факторами, влияющими на
продольную балансировку и управляемость самолета, являются изменение
4 Зак. 948
97
центровки, полетной массы, положение механизации крыла, скорость,
число М и высота полета.
Рассмотрим влияние центровки. Пусть центровка самолета увеличилась, тогда запас статической устойчивости уменьшится. Для балансировки самолета (см. рис. 3.4) потребуется отклонение руля высоты вниз.
При уменьшении центровки и соответствующем увеличении запаса статической устойчивости потребуется балансировочное отклонение руля высоты вверх.
Влияние полетной массы самолета проявляется в том, что при ее
изменении меняется потребная подъемная сила. При увеличении полетной
массы самолета для обеспечения горизонтального полета с нормальной
перегрузкой (пу = 1) требуется большая подъемная сила, что при одном
и том же значении скорости достигается увеличением угла атаки, т.е.
отклонением руля высоты вверх. Таким образом, балансировочная кривая
смещается вниз. Влияние положения механизации крыла также проявляется
в изменении подъемной силы, смещении фокуса самолета. В результате
балансировочная кривая смещается вниз.
Изменение скорости, числа М и высоты полета приводит к изменению
производных 5ву и хЦ» вследствие различного действия набегающего потока
воздуха. В результате для создания одной и той же перегрузки пилот
должен прикладывать к колонке штурвала различные усилия и создавать
различные перемещения на различных режимах полета. Характеристики
продольной управляемости оказываются переменными.
Перечисленные факторы существенно затрудняют пилотирование самолета, увеличивают загруженность экипажа, в предельных проявлениях
сказываются на безопасности полетов. Поэтому обеспечение балансировки
и заданных показателей продольной управляемости в течение всего полета
возлагается на автоматические средства балансировки и улучшения продольной управляемости. Решается эта задача автоматическим отклонением
стабилизатора и руля высоты в функции угловой скорости тангажа,
нормальной перегрузки, скорости, высоты, числа М полета, отклонения
колонки штурвала, а также путем изменения коэффициента штурвала
в функции тех же параметров.
3.4.2. Моделирование внешних возмущений
в продольном движении
Предаточные функции самолета в продольном короткопериодическом
вынужденном движении по внешним возмущениям. Внешними возмущениями, наиболее существенно влияющими на параметры продольного
короткопериодического движения, являются приращения внешней нормальной силы АГ у , внешнего момента тангажа АМ2 , угла атаки Аа„
и скорости угла атаки Аа ж из-за действия ветра. Рассмотрим модель
продольного короткопериодического вынужденного движения самолета
при наличии внешних возмущений:
*„(!) = А^х^Ю + В'ки»к(1).
(3.150)
98
Вектор-столбец входа по внешним возмущениям в продольном короткопериодическом движении
7
(
1
- Сии*)] = САМ ) Лт2В(1) До.(I) Ааж(1)].
(3451)
Матрица входа по внешним возмущениям в продольном короткопериодическом движении
Ч.',
О
(3.152)
о
О
О
О
С учетом уравнения выхода (3.81) определим передаточную матрицу
самолета в продольном короткопериодическом вынужденном движении на
внешние возмущения и нулевых начальных условиях:
.(Р) = .
= ( Р 1-А пк )- 1 В» к = Фпк(р)В^.
(3.153)
Элементами матрицы ^°к(р) являются передаточные функции'самолета, соответствующие параметрам вектора выхода Упк (р), совпадающего
в рассматриваемом случае с вектором переменных состояния продольного
короткопериодического движения Хм(р), на внешние возмущения II„.(р).
С учетом того, что переходная матрица состояния Фп][(р) определена
выражением (3.89), передаточные функции матрицы \У^к(р) сведем в
табл. 3.7. При этом введем следующие характеристики.
Коэффициенты усиления по угловой скорости тангажа До>г соответственно при действии внешней нормальной силы АГ у , внешнего момента
Таблица 3.7
дг„
ССГвР+1)
Дт
Дев.
Да,
<»:<Р)=
Да„ XV,
4*
:
Да
Да„ О) =
Да,
99
тангажа ДтгВ , приведенного к ветру угла атаки Аа ж и приведенной к ветру
скорости угла атаки Да,,:
(3.154)
ш„а>, аа,а ~
(3.155)
сог,о>г а,а
Ц,= _ _
а,а>2
0)7,а
_^1_^__ = _2_!!.
(3.157)
Коэффициенты усиления по угловой скорости тангажа Дюг и углу атаки
Да при действии внешних возмущений ДГу, Даж и Да ж :
Р
•Ч**.а
ш„о)2 о,а
о,а ~~
»
-п•
а,о> <в,а
I аI
а
а
(ЗЛ58)
Ш
РаУЬ
я
я
о,а, <Х,а
а
г
а и
' ' ~ ая
я
еог,ю2 ао,а
Коэффициенты усиления по углу атаки Да при действии внешних
возмущений ДГ у , Даж и Да ж :
(3.161)
,г„ -'
Я
(3.162)
К2|
гаг
,
.
^а*
I «а I
.
Коэффициенты усиления по углу атаки Да и угловой скорости тангажа
Дсо2 при действии внешних возмущений ДГу, Дт гЬ , Даг и Да ж :
100
^-^,
тОт=>
.т» _МЯг
К
«>..а~ |, Л 2| '
(3.165)
(3.166)
Тогда с учетом того, что \\^д™г(р) = -, получим:
Передаточные функции самолета в длиннопериодическом движении по
внешним возмущениям. Рассмотрим модель длиннопериодического вынужденного движения самолета при наличии внешних возмущений:
(3.167)
Здесь
(3.168)
О
а
вд,
О
а
(3.169)
О
е
Найдем из уравнения (3.167) изображение по Лапласу вектора параметров длиннопериодического движения
ХДП(Р) = (р! - А^^ВЬ.и^О») = \У дп (р)и дп (р),
(3-170)
где \У'п(р) = (р! - А дп )~ 1 В' п -передаточная матрица самолета в длиннопериодическом вынужденном движении по внешним возмущениям.
Передаточные функции сведем в табл. 3.8. При этом введем следующие
характеристики.
Коэффициенты усиления по скорости в длиннопериодическом движении
на внешние возмущения А^х и
Р"
Г
х
^
0)„
ь*»
Р•*„
Ь
<»„
(3.171)
101
Т а б л и ц а 3.8
Х
Х
п,
1
1Т
,у
Т 2 „2
"
1у р +
ЛУ
Д\У,
пт
'
Р
де
Аа
Коэффициенты усиления по углу наклона траектории в длиннопериодическом движении на внешние возмущения ДГ^ и Аа ж :
(3.172)
|со
м„
(3.173)
Передаточные функции самолета в полном продольном вынужденном
движении на внешние возмущения. Рассмотрим модель полного продольного движения самолета при наличии внешних возмущений:
Найдем изображение по Лапласу вектора параметров продольного
движения самолета
где ^'(р) = (р! — Ад) ~*В^- передаточная функция самолета в полном продольном
вынужденном движении на внешние возмущения.
Для определения элементов матрицы ^„(р) передаточных функций
воспользуемся упрощенной процедурой, описанной в разделе 3.2.2, и сведем
результаты в табл. 3.9.
Реакция самолета на импульсные возмущения в виде внешней нормальной
силы и внешнего момента тангажа. Реакция самолета на внешние возмущения так же, как в случае управляющих воздействий, зависит от его динамических характеристик и характеристик самих внешних возмущений.
Рассмотрим реакцию самолета на импульсные возмущения по внешней
нормальной силе АГ у = 8(1)АГу. Изображение по Лапласу импульсной
функции ДГу(р) = ДГ у .
102
Т а б л и ц а 3.9
XV (р)
\У
»: (Тер + 1) +
р(Т е р + 1)(Т2Р2
дг
Л
З е Р + 1)
1)(Тур2
а
де
?"(р) = Р(ТеР
1)(Тур2
*
АГ
"
дгу
'
"
АН
Да„
Да.
XV ДН
2
(Т 9 Р + 1)(Т2р2
1)(Тур2
2
(Т вР + 1)(Т2р2
1)(ТУР
Р
Р
иг АГу /
2
1_ "о,
ч
^(р)= Р(т9Р + 1)(таР2
1)(Тур2
, т„, 8
'
ДУ
2
р(Т9Р +. 1)(Т р
Да„
\У
2
1)(Тур
Да
р(Т е р + 1)(Т 9 р + 1)(Т2р2
'
2
Наличие или отсутствие статических ошибок в короткопериодическом
движении определим следующим образом:
р-»0
Р -> О
'
-----
у
(3.176)
(Ап у> ) уст = Нт {рАГ у (р) ^*' (р)} = О,
р-О
Ао у с т - Нт
Таким образом, самолет астатичен по угловой скорости тангажа, углу
атаки и нормальной перегрузке, но имеет статическую ошибку по тангажу
при импульсном воздействии внешней нормальной силы. Статическая
ошибка по тангажу приводит к появлению статической ошибки по углу
наклона траектории после окончания длиннопериодических колебаний:
А6 У С 1 = Нт{рА1 у (р)\С(р)} =
р -> О
= АГ„ Нт
" Р - О [р(Т в р + 1)(Т02р2 + 2Та^„р + 1)(Тур2
= Р4 + ^,И1]1свГА*у.
(3.177)
Статическая ошибка по углу наклона траектории приводит к постоянному изменению высоты:
АНует=Ш
р -> О
1)(Т 2 р 2 + 21
(3.178)
Статическая ошибка по скорости
АУ У С 1 = Шп
р -> О
э2 + 2Т а ^ а р+ 1)(Т у р 2 (3.179)
104
Таким образом, импульсная нормальная внешняя сила изменяет продольную траекторию полета самолета. Для парирования этого возмущения требуется вмешательство пилота или автоматики.
Рассмотрим реакцию самолета на импульсные возмущения по внешнему моменту тангажа Ат2В (I) = 5 (I) Дтгв , изображение которого по
Лапласу Ат гв (р) = Дт г в . Тогда:
(ю2)уст = Нт {рДтгв(р)\\^;(р)} = О,
Р -> о
Да усТ = 11т { Р Д т г в ( р ) \ \ " ( р ) } = О,
Р -» о
(пуа)уст - Пгп { Р А т 2 в ( р ) ^ ( Р ) } = О,
Аи уст = Нт {рДт 2в (р)\Уд™»(р)} = С;Дтгв ,
р -> О
(3.180)
А9уст = рНт
{рДт„(р)\С-(р)} = С"Ат г в ,
-» О
АН'',, = Нт { рАт гв (р) \У^" (р) } = - оо,
АУ У С Т = Нт { Р Ат гв (р)\Уду"(р)} = к™"КуАт 2 .
р -» О
Таким образом, при действии импульсного внешнего момента тангажа
самолет как объект управления астатичен по угловой скорости тангажа,
углу атаки и нормальной перегрузке, имеет статические ошибки по углу
тангажа, наклона траектории и скорости, а также является неустойчивым
по высоте. Для парирования импульсного внешнего момента тангажа
требуется вмешательство пилота или автоматики.
Реакция самолета на ступенчатые возмущения (внешнюю нормальную
силу и внешний момент тангажа). Пусть на самолет действует ступенчатая
внешняя нормальная сила АГу (I) = 1 (I) АГу . Изображение по Лапласу единичной функции АГу(р) = -АГ у . Определим установившиеся значения параметров продольного движения после окончания переходных процессов:
г
Аа у с т = (к^>а + к а ') АГ у , (Ап Уа ) уст = (к^ Пу _ + к^)ДГу ,
р
Р
Р
(3.181)
р2
Ди уст ->оо, Де у с т ->оо, ДУ уст -»оо, АН уст -»оо.
105
Таким образом, при действии ступенчатой внешней нормальной силы
возникают статические ошибки по угловой скорости тангажа, углу атаки
и нормальной перегрузке. Это приводит к неустойчивым процессам по углу
тангажа, углу наклона траектории, скорости и высоте.
Аналогичным образом рассмотрим действие ступенчатого внешнего
момента тангажа Ат2В(1) = 1(1)Дтгв; Дт гв = (1/р)Дт гв :
(Дсог)уст = к™" Ат г в , Аа у с т = 1с™"аДт„,
(Дп Уа ) уст = к™;Пу Дт г в ,
р
р
Р
(3.182)
р
До уст ->оо, Д0уст->оо, ДУ уст -»оо, ДНуст-юо.
Действие ступенчатого внешнего момента тангажа существенным образом изменяет параметры продольного движения самолета и так же, как
и при действии ступенчатой внешней нормальной силы, требует вмешательства пилота или автоматики.
Реакция самолета на вертикальные ветровые возмущения. Рассматривая
модели вынужденного возмущенного движения самолета под действием
ветра, мы получим передаточные функции самолета по параметрам продольного движения при действии приведенного к ветру углу атаки Да„
и скорости угла атаки Да ж . Эти передаточные функции могут быть
объединены в одну передаточную, позволяющую исследовать реакцию
самолета на вертикальные ветровые порывы и знакопеременные ветровые
возмущения. Рассмотрим, в частности, передаточные функции самолета по
параметрам короткопериодического движения углу атаки Да и связанной
с ним нормальной перегрузке Дпу :
(3.183)
Пусть на самолет • действует ступенчатое ветровое возмущение
Да„(1) = 1(1) Да № , Да(р) = 1/рДа ш . Реакция самолета будет следующей:
(3.184)
Причем в начальный момент времени приращение угла атаки Да(0) =
= Да,о = ^ У() /У 0 максимально. В конце короткопериодического движения
угол атаки возвращается к исходному балансировочному положению.
Таким образом, самолет является астатическим при действии ступенчатого
ветрового возмущения или, как говорят, «приводится к ветру», и в постоян106
ном восходящем или нисходящем потоке занимает по углу атаки то же
положение, что было до начала действия возмущения. При этом самолет
поднимается или опускается вместе с воздушным потоком, набирая статическую ошибку по высоте. Реакция самолета по перегрузке аналогична,
и после окончания короткопериодических колебаний п у -» 1, а максимальное значение перегрузки реализуется в начальный момент времени.
Характеристики устойчивости и управляемости самолета при действии
ветрового возмущения определяются аналогично (3.35) -(3.38).
Рассмотрим ветровое возмущение в виде гармонического сигнала
Аа 0 = Да^зтсо^,
(3.185)
где «„-круговая частота вынужденных колебаний самолета под действием ветра.
Реакция самолета определяется его амплитудной частотной характеристикой и переходной функцией
Аа = А№((о№)8т({ои,1-ф№),
где А„(ю„), ф„- амплитуда и сдвиг по фазе.
(3.186)
Обозначим о»т = 1/Т„ . Как показывают исследования, при низких
частотах ю ж « ю т величина А ж (оо ж ) мала и перегрузки Ап у незначительны
даже при заметных Ааж(1), так как самолет успевает «привестись к ветру»
при колебаниях Да,Д1). При высоких частотах (ю„, » ют) амплитуда Дав
равна амплитуде Ааи,о и Дп у< , как и при ступенчатом порыве. При этом
положение самолета в пространстве практически неизменно, так как
вследствие своей инерционности он не разворачивается «по ветру» при
смене знака ветрового порыва.
Реальные знакопеременные турбулентные ветровые воздействия представляют собой спектр гармонических воздействий со случайными частотами и амплитудами. При этом воздействия с большой амплитудой на
высоких частотах маловероятны. В то же время на низких частотах
нарастание порыва происходит медленно, амплитуда перегрузок Апу
невелика даже при больших изменениях Д\\^у и соответственно Да № !
Поэтому реакция самолета на знакопеременные ветровые возмущения
оценивается в основном на средних частотах со ж , когда возможны две
ситуации: сот < к>^ и о>т > со,. .
В первом случае при оот < ю^ амплитуда ветровых возмущений по Ап у
меньше максимальной. Во втором случае возможен резонанс колебаний,
когда амплитуда изменения перегрузки существенно больше максимальной. К такой реакции может привести чрезмерное демпфирование (в том
числе и с помощью автоматики) при недостаточной устойчивости самолета.
Исследование реакции самолета на горизонтальные ветровые воздействия А^х можно провести с использованием соответствующих передаточных функций (см. § 3.3). Особую роль играет реакция самолета на
ветровое воздействие А\У Х , обусловленное изменением скорости ветра
У земли по высоте:
™х = ^Н.
(3.187)
107
Это явление называется «сдвигом ветра». Как показывают исследо*
вания, на режимах полета с постоянным углом тангажа Аи ф О (при заходе
на посадку) производная скорости ветра \№„ + О вызывает возмущения по
приращению угла наклона траектории А6, а следовательно, и приращению
угла атаки Да, так как Да = — Д6 при Дч = 0. Эти возмущения могут быть
значительными и привести к выходу самолета на недопустимые углы атаки
а > а доп , что особенно опасно при снижении самолета на малых скоростях
в условиях близости земли.
Глава 4
ДИНАМИКА БОКОВОГО ДВИЖЕНИЯ САМОЛЕТА
4.1. СТРУКТУРА БОКОВОГО ДВИЖЕНИЯ
Боковое движение самолета-это поступательное движение его центра
масс в направлении, перпендикулярном его плоскости симметрии ХОУ,
а также вращательное движение относительно центра масс вокруг осей ОХ
и ОУ. Пусть исходным невозмущенным движением самолета является
прямолинейный установившийся горизонтальный полет, а все силы и
моменты, действующие на самолет в полете взаимно уравновешены при
отсутствии управляющих воздействий и внешних возмущений. Если к
самолету приложить управляющее воздействие или внешнее возмущение,
вызывающие его вращение вокруг осей ОХ или ОУ, или смещение вдоль
оси О2, то боковое движение самолета станет вынужденным, а после
снятия управляющего воздействия или внешнего возмущения-собственным. Ввиду того что боковое движение сопровождается вращением относительно двух осей, оно в некотором смысле сложнее, чем продольное.
В общем случае при достаточно больших возмущениях боковое движение
вызывает существенное изменение параметров продольного движения, т. е.
возмущенное движение самолета принимает пространственный характер.
Для того чтобы рассматривать боковое движение изолированно от продольного, возмущения должны быть малы, тогда боковое и продольное
движения независимы друг от друга.
4.1.1. Виды бокового движения
Собственное боковое возмущенное движение. Рассмотрим собственное
боковое движение самолета, сформировавшееся в результате кратковременного отклонения элеронов. Это приведет к появлению пары сил ДУ Э ,
которая создаст на плече 2Э управляющий аэродинамический момент крена
Мх5 согласно (1.30). Под действием этого момента самолет начнет поворачиваться относительно оси ОХ и, следовательно, менять углы крена
у и скольжения р.
108
Увеличение угла скольжения вызовет увеличение подъемной силы на
выдвинутом вперед полукрыле и уменьшение подъемной силы на отстающем полукрыле. Следовательно, появится стабилизирующий статический момент крена по углу скольжения Мхр согласно (1.22), направленный
на создание крена в сторону отстающего при скольжении полукрыла.
Одновременно появится стабилизирующий статический момент рыскания
по углу скольжения М ур согласно (1.25) и (1.26), направленный на уменьшение угла скольжения р.
При действии этих моментов самолет будет поворачиваться вокруг осей
ОХ и ОУ. Вращение самолета относительно оси ОХ вызовет появление
демпфирующего момента крена МХО) , а вращение самолета относительно
оси ОУ вызовет появление демпфирующего момента рыскания Му(0 .
Демпфирующий момент Мхю будет направлен встречно относительно
момента М х р, а демпфирующий момент Муш будет направлен встречно
относительно момента М ур . В тот момент, когда угол скольжения станет
равным нулю (р = 6), угловая скорость соу будет максимальна и самолет по
инерции пройдет это положение. Угол скольжения Р и стабилизирующий
момент Мур поменяют знак на противоположный и самолет замедлит
вращение вокруг оси ОУ. Демпфирующий момент Му(0 кратковременно
уравновесит стабилизирующий момент М у р, угловая скорость ю у станет
равной нулю, а самолет под действием стабилизирующего момента Мур
начнет вращаться в обратном направлении в сторону уменьшения угла
скольжения р.
Аналогичным образом будет развиваться движение по крену под
действием моментов М хр и Мш . Движение по углу скольжения Р является
первичным по отношению к движению по углу крена у, который зависит от
угла скольжения. В итоге колебания по углу крена отстают от колебаний по
углу скольжения по фазе. Такой процесс повторится, и после нескольких
колебаний самолет практически возвратится в исходное положение равновесия, т. е. к первоначальным углам скольжения и крена. Этот процесс
проходит достаточно быстро, поэтому боковое движение самолета по
угловой скорости крена ю х , углам скольжения р и крена у называют
быстрым боковым или боковым короткопериодическим.
Наличие остаточного угла крена после затухания короткопериодического движения приводит к развитию медленного бокового или бокового
спирального движения. Начальный угол крена у вызывает нарушение равновесия Уа = О, так как силе тяжести О противодействует составляющая
Уа со8 у < С. Самолет теряет высоту и приобретает отрицательный угол
наклона траектории 9. При этом нарушается равновесие сил по оси ОХ
и появляется составляющая силы тяжести Озтб, которая стремится
увеличить скорость полета. Кроме того, неуравновешенная составляющая
силы тяжести Сзту вызовет скольжение самолета в плоскости ХО2
и искривление траектории в сторону опущенного полукрыла с нарастающей
скоростью. Траектория движения представляет собой нисходящую спираль
переменного радиуса.
Скольжение самолета под действием силы Озтб на опущенное полукрыло с переменным углом скольжения Р приведет к возникновению ста109
билизирующего момента рыскания М у р , под действием которого самолет
будет разворачиваться относительно оси ОУ с изменяющейся угловой
скоростью со . При этом он будет отклоняться от заданного курса на
изменяющийся в процессе полета угол рыскания. Наличие угла скольжения
приводит к возникновению стабилизирующего момента крена М х р , направленного на уменьшение крена. Навстречу моментам Му(} и М х р
начинают действовать демпфирующие моменты М уш и М хш . Таким
образом, на самолет одновременно действуют моменты М у р и М х т ? ,
вызывающие увеличение начального угла крена, и моменты М х р и М у т ? ,
способствующие его уменьшению.
Вынужденное боковое возмущенное движение. Рассмотрим вынужденное
боковое движение самолета, сформировавшееся в результате длительного
отклонения элеронов. Если при этом одновременно отклоняется руль
направления для противодействия возникающему скольжению, то управляющий момент крена М х 8 э вызовет вращение самолета относительно оси
ОХ. Одновременно на самолет будет действовать демпфирующий момент
крена М хиг Угловая скорость вращения самолета будет увеличиваться до
тех пор, пока не наступит равенство моментов М х8 и Мхео . При этом
самолет получит некоторую установившуюся угловую скорость крена
сох уст . Таким образом, при отклонении элеронов на постоянный угол 5Э
самолет будет вращаться относительно продольной оси с установившейся
угловой скоростью. Тайое быстрое боковое движение называют движением
«чистого крена».
Рассмотрим вынужденное боковое движение самолета, сформировавшееся в результате длительного отклонения руля направления. Если при
этом одновременно отклоняются элероны для противодействия возникающему крену, то управляющий момент рыскания М у8 вызовет поворот
самолета относительно оси ОУ. Возникает стабилизирующий момент
рыскания М у р , противодействующий моменту М у 6 а и демпфирующий
момент рыскания М у т . Совершив несколько колебаний, самолет стабилизируется на некотором установившемся угле скольжения (Зуст, когда
выполнится условие равновесия моментов М у 5 , М ур и М у щ . Таким
образом, при отклонении руля направления самолет совершает'быстрые
затухающие колебания относительно нормальной оси ОУ. Угол скольжения Р принимает установившееся значение.
Отклонение руля направления приводит не только к повороту самолета относительно оси ОУ, но и относительно оси ОХ, "если этому не
противодействовать отклонением элеронов. При этом возможны прямая,
нейтральная и обратная реакции самолета по крену. Прямая реакция
возникает в том случае, если стабилизирующий момент крена М х р будет
направлен в сторону отстающего при скольжении полукрыла, а управляющий момент крена М х 8 -в противоположную сторону и М х р > М х8 .
Самолет начнет крениться в сторону отклоненной вперед педали и буде"т
стремиться устранить возникшее скольжение кренением на отстающее
110
полукрыло. Если руль направления отклоняется резко, то управляющий
момент М х5н увеличивается быстрее, чем стабилизирующий момент Мх^,
и самолет вначале может крениться в сторону отклоненной назад педали,
а затем по мере увеличения момента М х р направление кренения изменится
на противоположное. Нейтральная и обратная реакции по крену могут
наступить на закритических скоростях полета. Колебательное движение
самолета по крену, скольжению и рысканию еще называют «голландским
шагом». Оно сопровождается колебательным движением самолета с
полукрыла на полукрыло вокруг продольной оси и разворотом вокруг
нормальной оси. При этом траектория движения самолета имеет форму
змейки.
Изменение углов скольжения и крена приводит к увеличению углов
рыскания на А\|/, угла пути на АЧ* и линейного бокового отклонения на Дг.
Таким образом возникает боковое траекторное движение.
4.1.2. Моделирование бокового движения
Боковое движение по первичным и вторичным параметрам. Анализ
структуры векторного уравнения бокового собственного движения самолета (2.111) показывает возможность его дальнейшего упрощения. Это
связано с тем, что первые пять параметров бокового движения (приращения угловых'скоростей крена Асох и рыскания Аео у , углов скольжения Ар,
крена Ау и рыскания А\|/) не зависят от последних двух параметров
бокового движения (приращений угла пути А*Р и бокового отклонения Дг).
Обозначим первые пять параметров вектора хб через х 6 1 :
АРМ ДУФ
(4.1)
и назовем вектором-столбцом первичных параметров состояния бокового
движения. Обозначим последние два параметра вектора х6 через х 6 2 ,
т
причем [х62(1)] = [ АЧ* (I) А2 (г) ] и назовем вектором-столбцом вторичных
параметров состояния бокового движения.
Тогда собственное боковое движение самолета по первичным параметрам описывается уравнением
х61(1) = А 61 х 61 (1).
(4.2)
Матрица состояния бокового движения самолета по первичным параметрам
А 61 =
о
о
о
о
а
.»,
о
о
Р,у
О
(4.3)
о
111
Уравнение (4.2) описывает собственное боковое возмущенное движение
самолета, возникновение которого обусловлено начальными возмущениями Дсо?, Дю°, ДР°, Ду°, Д\|/° .
Собственное боковое движение самолета по вторичным параметрам
описывается уравнением
*б2 (О = А 62 х б2 (I) + ВЬ иЬ (I),
(4.4)
где и 6 ] (I)-вектор входа по управляющим воздействиям в виде изменения первичных
параметров (иуб] (I) = х 6 1 (I)).
Матрица состояния бокового движения самолета по вторичным параметрам
г0
А», =
(4.5)
Матрица входа по управляющим воздействиям первичных параметров
Вб1
'-
О 0 афр а ч / у О
0 0 0
0 0
(4.6)
Уравнение (4.4) описывает собственное боковое возмущенное движение
самолета, возникновение которого обусловлено начальными возмущениями ДЧ*° и Дг°, а также вынужденное движение самолета по вторичным
параметрам, вызванное изменением первичных параметров.
Быстрое и медленное боковое движение. Применим к уравнению (4.2)
преобразование Лапласа
( Р 1-А 6 1 )Х 6 1 (Р) = 0.
(4.7)
Характеристический определитель уравнения (4.6) имеет вид:
(Р ~
*<0„$
(Р-
1
Р,Р
"ар,р)
0
А(р) =
\
— а.,
0
а
0
0
0
0
(4.8)
0
- р,у
р
0
0
р
Раскрыв определитель и приравняв его нулю, получим характеристическое уравнение
4
3
2
р (А«4 р + А«з р + А«2 р + А=р + А« 0 ) = 0.
Коэффициенты уравнения определяются следующим образом:
А| = 1,
6
А 3 = - (а^ + а ю л + а р р ) = - (И?" + М?' + Р^);
112
(4.9)
2 — а ю ж ,ш х а ш у ,<в у + а р,р а ш„ю„ + а р,р а ш у ,ш у
"1 ~ ~ а р,р а ш х ,ш„ а ш у ,(о у + а р,р а т г ,(1> ж а ш ж ) а> г
а
А
р,ш у а р,р а (о„га х ~ а р,и, а о) у ,(о 1 а со х ,Р ~~ а Р,у а у,«\
0 = - а р,т а т,оо < а о)„ш у а р,р + а р,у а у,т 1 а со„р а «> у ,оо у = ~ Р^М^'Р
- ММ™')-
Характеристическое уравнение (4.9) имеет пять корней. Один корень
равен нулю (А,5 = 0). Среди четырех других, как показывает практика
расчетов, имеются два действительных (К1 и К2) и два комплексных
сопряженных (Х,3 и Х4) корня.
Наличие нулевого корня обусловлено нейтральностью неуправляемого
самолета по рысканию. Этот корень для исследования динамики бокового
движения самолета принципиального значения не имеет. Значение и знак
четырех других корней существенным образом влияют на структуру бокового движения.
Обычно один из действительных корней по модулю значительно больше
другого ( | Я.1 1 » | Х 2 1 ). Большому действительному корню Х^ соответствует
быстрое креновое движение. Это движение является апериодическим. Малому вещественному корню Х,2 соответствует медленное спиральное боковое движение по крену и рысканию. Это движение также является апериодическим.
Паре комплексных сопряженных корней Х3 и Х4 соответствует быстрое
колебательное короткопериодическое движение. Оно обусловлено тем, что
при возникновении возмущения отрицательный угол крена приводит к
скольжению на левое полукрыло, в результате чего появляется положи_
п
тельный момент крена М|;ДР и самолет начинает крениться в обратную
сторону - появляется «голландский шаг».
Таким образом, боковое движение самолета состоит из двух апериодических и одного колебательного движения, причем одно апериодическое
и колебательное движение является быстрым, а второе апериодическоемедленным. При исследовании динамики бокового движения медленным
спиральным движением часто пренебрегают. Если М™', Й™у и Р 2 " малы, то
а
а
со„щу = 0> ш у ,ш х = 0 и а р у = 0. Тогда собственное быстрое боковое движение
самолета описывается уравнением
х66(1) = А6бХбб(1).
(4.11)
Вектор параметров состояния быстрого бокового движения
[х66(1)]т = [Дш ж Ю Дю,(1) Ар(1) Ду(1)] .
(4.12)
113
Матрица состояния быстрого бокового движения
аш„т<
0
0 0
О ' а й у > Ш у а Юу ,р О
0
а
М у ар,р О
I ат,0<
0'
О О^
Общее решение уравнения (4.11) имеет вид:
(4.13)
ЛЮхО =А ш , е ~ м +А ^ е ~ м +А»,е
Диу(1) = А й ,е- х . 1 + А^е-М + А^
+Фи ),
(4.14)
ДР(1) = Ар
Ду(1) = А^
Здесь постоянные Аюю_,, А , А™жж,,
, Шу,
, ф
Ар, Ар,
у,
Ар", ф'р, А у,, ААу,, А ™ , ф у определяются из начальных условий.
Траекторное боковое движение. Для получения модели бокового траекторного движения самолета примем следующее допущение. Пусть развороты самолета совершаются координирование без скольжения. Тогда при
ДР = 0 и Л(^ = 0 из третьего и пятого уравнений системы уравнений (2.111)
получим Д^ = — <Хр у Ду. Вектор параметров траекторного бокового движения х6т(1) сформируем из первичного параметра -приращения угла
рыскания Д\|/ и вектора вторичных параметров х62 (I) :
(4.15)
Траекторные параметры Д\у, ДЧ* и Дг зависят теперь только от параметров быстрого бокового движения, поэтому траекторное боковое движение самолета можно описать уравнением
где и^(1)- вектор входа по управляющим воздействиям в виде изменения параметров быстрого бокового движения (и^т(1) = х^^)).
Матрица состояния. бокового траекторного движения
О
О
О
О
О
(4.17)
Матрица входа параметров состояния бокового траекторного движения
по управляющим воздействиям параметров быстрого бокового движения
О О
О О
о о
114
0
-а„
(4.18)
Уравнение (4.16) описывает собственное боковое траекторное движение
самолета, возникновение которого обусловлено начальными возмущениями Д\|/°, АЧ* 0 и Д2°, а также вынужденное траекторное движение
самолета, вызванное изменением параметров быстрого бокового движения.
4.2. УСТОЙЧИВОСТЬ БОКОВОГО ДВИЖЕНИЯ
4.2.1. Характеристики устойчивости бокового движения
Статическая устойчивость бокового движения. Боковая статическая
устойчивость самолета определяет равновесие моментов рыскания и крена.
Поэтому принято рассматривать два вида боковой статической устойчивости: путевую (флюгерную) относительно оси ОУ и поперечную относительно оси ОХ. Под путевой статической устойчивостью самолета
понимают его способность самостоятельно без участия пилота в управлении противодействовать изменению угла скольжения.
Пусть самолет находится в прямолинейном установившемся полете.
Если в результате воздействия внешнего возмущения и изменения угла
скольжения на величину Др появится аэродинамический момент Мур,
направленный на сохранение исходного угла скольжения, то самолет
обладает путевой статической устойчивостью. Запас путевой статической
устойчивости самолета удобно определяется через положения координат
центра масс самолета Хт и фокуса х р р по углу скольжения относительно
размаха крыла.
Фокусом по углу скольжения называется точка Рр, расположенная
в плоскости симметрии самолета, относительно которой моменты рыскания и крена остаются постоянными при малых изменениях угла скольжения
(рис. 4.1). Положение фокуса х рр и центра масс самолета хт выражается
в долях размаха крыла 1:
хР|3 = ^ 100%,
хт = — 100% .
(4.19)
При изменении угла скольжения на Др в фокусе по углу скольжения Рр
возникает приращение поперечной силы Д2, которое на плече х р р-х т
создает момент ДМур. Если центр масс самолета расположен впереди
фокуса (хрр > хт), то момент ДМур < 0 будет стремиться развернуть самолет
на устранение появившегося приращения угла скольжения Ар, т. е. самолет
будет обладать путевой статической устойчивостью.
Если центр масс самолета находится позади фокуса (хрр < хт), то при
увеличении угла скольжения (Ар > 0) на самолет будет действовать момент
ДМ > 0, при уменьшении угла скольжения (Ар < 0) - момент ДМ < 0.
В обоих случаях самолет стремится еще больше отклониться от исходного
состояния равновесия по углу скольжения и не обладает путевой статической устойчивостью.
115
Основной характеристикой путевой статической устойчивости является
Р
степень путевой статической устойчивости по углу скольжения ту-частная производная коэффициента момента рыскания по углу скольжения.
Самолет обладает путевой статической устойчивостью, если х р р > хт
или т у < 0 (рис. 4.2). Следует помнить, что самолет, обладающий путевой
статической устойчивостью, не стремится выдержать исходное направление
полета, а лишь противодействует изменению угла скольжения и подобно
флюгеру поворачивается по углу рыскания, самопроизвольно устраняя
появившийся угол скольжения. При Ар ф 0 боковая аэродинамическая сила
2а искривляет траекторию, поворачивая вектор скорости центра масс
относительно первоначального положения. Для возвращения самолета
к исходному направлению полета требуется вмешательство пилота или
автоматики.
Под поперечной статической устойчивостью самолета понимают его
способность при возникновении скольжения крениться в сторону отстающего полукрыла.
Пусть самолет находится в прямолинейном установившемся полете
и в результате случайного возмущения появилось приращение угла крена
Ау. Симметричность обтекания самолета воздушным потоком нарушится
и самолет будет скользить на опущенное полукрыло с углом Др. Если при
скольжении на правое полукрыло (Др > 0) возникает момент крена, стремящийся повернуть самолет в сторону левого полукрыла (ДМхр < 0)
и устранить образовавшееся приращение угла скольжения Др, то самолет
обладает поперечной статической устойчивостью.
Если при скольжении на правое полукрыло (Др < 0) возникает момент
крена, стремящийся и далее повернуть самолет в сторону правого полукрыла (ДМхр > 0) и увеличить приращение угла скольжения Др, то самолет не обладает поперечной статической устойчивостью. Степень поперечной статической устойчивости по углу скольжения т^-частная производная коэффициента момента крена
по углу скольжения, является основной характеристикой поперечной статической устойчивости. Самолет обладает поперечной статической устойчивостью, если т| < 0. Изменение
коэффициента тх от угла скольжения
Р аналогично изменению коэффициента ту, показанного на рис. 4.2.
Наряду с устойчивостью по углу
скольжения рассматривают также усРис. 4.1. Схема сил, действующих на тойчивость по угловым скоростям
самолет с учетом фокуса по углу рыскания и крена. Степень путевой
скольжения
статической устойчивости по скорос116
ти рыскания т/-частная производная коэффициента момента крена по
скорости рыскания. Степень поперечной статической устойчивости по
скорости крена т™"-частная производная коэффициента момента крена
по скорости крена. Самолет обладает
путевой и поперечной статической
устойчивостью, если гПу у < 0 и
т? < 0.
.
Динамическая устойчивость бокового движения. Наличие путевой и по- Рис. 4.2. Зависимости коэффициента
перечной статической устойчивости аэродинамического момента рыскания
еще не гарантирует возвращения са- от угла скольжения
молета к исходному режиму полета.
Теоретические и экспериментальные
исследования бокового короткопериодического движения самолета по углу
скольжения показывают, что оно с достаточной точностью может быть
описано затухающей синусоидой
где Ьб-коэффициент демпфирования боковых короткопериодических колебаний;
уб -круговая частота боковых короткопериодических колебаний; фд-фазовый угол
сдвига; А|-постоянная, определяемая из начального условия Др = Р° при I = 0.
Коэффициент демпфирования Ьб и круговая частота колебаний У6,
а также частота недемпфированных колебаний ео6, определяемая выражением шв = ,/п| + V! , являются характеристиками демпфирования самолета в боковом короткопериодическом движении.
Выражение (4.20) описывает колебательный затухающий процесс,
аналогичный представленному на рис. 3.3 процессу изменения угла атаки.
С помощью (4.20) определяют основные характеристики динамической
устойчивости самолета в боковом движении, по которым оценивают
качество переходного процесса: период собственных боковых короткопериодических колебаний Т6, время затухания т^т, число короткопериодических колебаний до практически полного затухания Пэат:
= 3я/У 6 ,
(4.21)
Характеристики боковой устойчивости, за исключением времени затухания колебаний 4Т (не более 12 с для взлетно-посадочных режимов и не
более 20 с для крейсерского режима), пока не нормируются, а получают
только качественную оценку.
117
4.2.2. Усповия устойчивости собственного
бокового движения
Устойчивость быстрого крепового движения. Условие устойчивости
быстрого крепового движения -отрицательное значение большого вещественного корня (Хг < 0) характеристического уравнения (4.8). Приближенное
значение большого корня Х,: можно получить, отбрасывая в уравнении
(4.8) слагаемые со степенями р ниже третьей. Тогда
I, * - А36 = И?' + М»У + Р|к.
(4.22)
Практика расчетов показывает, что наибольшим здесь является М™ х ,
поэтому обычно принимают Х,: = М™х. Так как на докритических углах
атаки М"« < 0, то и Я,1 < 0. Поэтому быстрое креновое движение быстро
затухает, демпфируется. На закритических углах атаки, когда М™ х > О,
наоборот, вместо демпфирующего момента возникает момент самовращения. Большой действительный корень А,1 становится при этом положительным, а самолет - апериодически неустойчивым.
Устойчивость медленного спирального движения. Условием устойчивости
спирального бокового движения является отрицательное значение малого
действительного корня К2 < О характеристического уравнения (4.9). Приближенное значение малого корня Х,2 можно получить, отбрасывая
в уравнении (4.9) три первых слагаемых. Тогда
А1
_
рР (м«х м?у + М»» -
(423)
Ру '
Практика расчетов показывает, что корень 12 может иметь как отрицательный, так и положительный знак. Отрицательному значению корня
(Х2 <Т)) соответствует медленно затухающее движение по крену и рысканию. Если этот корень положителен (Х,2 > 0), то движение апериодически
неустойчиво и характеризуется медленным нарастанием крена, разворотом
и снижением.
^
Устойчивость быстрого колебательного движения. Для анализа устойчивости быстрого колебательного движения рассмотрим его составляющие
по рысканию и скольжению с помощью уравнения
х66(г) = АббХб6(1).
(4.24)
Здесь
Характеристический определитель уравнения (4.24) имеет вид
А(Р)=
118
(4.26)
Коэффициент демпфирования боковых короткопериодических колебаний
Иу>Шу
+ ар,р) = -- (М^ + Р 2 к ) .
(4.27)
Частота недемпфированных боковых короткопериодических колебаний
<п| = аШу,ту а м - а р , Шу а Ш у > р = М"У Р 2 Р К - И*.
(4.28)
Корни характеристического уравнения
X 2 + 2Ь 6 Х + со2 = О
(4.29)
определяют характер собственного бокового короткопериодического возмущенного движения самолета
^з,4= -п 6 ±,/п 6 2 -сй 2 .
2
(4.30)
2
Как правило, со > Ь и со| > 0 и корни уравнения (4.29) являются
комплексными сопряженными, а собственное короткопериодическое движение - колебательным
А, 3 ,4= -п б ±1 ч /оз 6 2 -Ь 6 2 .
(4.31)
Тогда решение уравнения (4.24) может быть получено в аналитическом
виде:
А с о 1 = А^е- ь б' 5 щ(у 6 1 + Ф^),
где Ад\ А§- постоянные, определяемые из начальных условий До>у = Дсо" и Др = ДР°
при I = 0; ф д У , ф|- фазовые углы сдвига боковых короткопериодических колебаний.
Круговая частота собственных боковых короткопериодических колебаний
2
у6 = Ую|-Ь 6 ,
(4.33)
Необходимыми и достаточными условиями устойчивости опорного
собственного бокового короткопериодического движения по критерию
Гурвица являются следующие неравенства:
Ь6 > О,
ю62 > 0.
(4.34)
Если самолет обладает путевой статической устойчивостью, то условие
(4.34) выполняется. Однако этот вывод справедлив только для малых углов
атаки. При значительных углах атаки существенное влияние на рыскание
оказывает движение крена. Тогда наличие путевой устойчивости еще не
гарантирует устойчивости рыскания и, наоборот, при отсутствии путевой
устойчивости рыскание может быть устойчиво благодаря влиянию крена.
Обычно же Ь6 > 0 и соб2 > 0, и отклонения параметров Асоу и Др
в
процессе собственного бокового короткопериодического движения будут
119
затухать, стремясь к нулю. Тогда это движение асимптотически устойчиво.
Если Ь6 < О и ю| < 0, корни КЗА становятся действительными сопряженными, а движение по рысканию-апериодически неустойчивым.
Устойчивость собственного бокового движения самолета по первичным
параметрам. Для анализа устойчивости воспользуемся критерием РаусаГурвица. Условия устойчивости следующие:
6
АО > О, А! > О, А| > О, А 3 > О,
К = А6! А62 А63 - (А83)2 А60 - (А!)2 > 0.
4 35)
'
Коэффициенты характеристического уравнения А^, А|, А| положительны при полете самолета на дозвуковых скоростях и докритических углах
,->ш
атаки, так как все вращательные производные, кроме М у х , имеют отрицательный знак у статически устойчивого самолета. Таким образом,
устойчивость самолета в боковом движении по первичным параметрам
будет определяться по существу двумя условиями:
у
А 0 > О, К > О,
(4.36)
так как коэффициент АО может в принципе иметь любой знак. Дальнейший
анализ устойчивости удобно провести с помощью полученных условий
устойчивости подвидам бокового движения.
Представим характеристическое уравнение (4.9) в следующем виде:
(р - Х!)(Р - Х2)(р2 + 2^ + со2) = 0.
(4.37)
Из (4.8) и (4.36) следует, что
2п б -(Х 1 + Х2) = А 6 3 , ю| ^ Х2 = А 6 0 .
(4.38)
Из (4.37) следует, что условие АО выполняется в том случае, если ^ < О
(устойчиво быстрое апериодическое движение), Х,2 < 0 (устойчиво медленное спиральное движение), со2 > 0 (устойчиво короткопериодическое движение). Вторым условием устойчивости короткопериодического движения
является Ь6 > О, а полное боковое движение по первичным параметрам
может быть устойчиво лишь при К > 0. На границе колебательной
устойчивости, когда комплексно-сопряженные корни характеристического
уравнения Х,3 и А,4 становятся чисто мнимыми, выполняется условие К = 0.
Весьма важным является вопрос о влиянии статической поперечной
и путевой устойчивости на динамическую боковую устойчивость самолета.
Как показывают исследования, при увеличении путевой статической
устойчивости самолет приближается к границе спиральной устойчивости
и может стать спирально неустойчивым. Причем степень путевой статической устойчивости, при которой произойдет потеря спиральной
><. гойчшюсги, тем больше, чем больше поперечная статическая устойчивость самолета.
Гели увеличивается поперечная статическая устойчивость, самолет
удаляется от границы спиральной устойчивости, но при этом ухудшается
затухание его колебательного движения. При этом возможна потеря
колебателитой устойчивости. Такой характер влияния статической устой120
чивости на динамическую объясняется следующим образом. Пусть самолет
получил начальное возмущение-положительный угол крена и накренился
на правое полукрыло. Следствием этого будет возникновение положительного угла скольжения и пропорциональных ему моментов М х р и Мур.
Если самолет обладает статической устойчивостью в боковом движении,
эти моменты будут отрицательными. Самолет начнет поворачиваться
относительно продольной оси ОХ, уменьшая крен, и относительно
нормальной оси ОУ, уменьшая угол скольжения. Если велика путевая
статическая устойчивость, самолет будет двигаться без скольжения, момент
крена М х р будет равен нулю, начальный угол крена сохранится и вызовет
движение самолета по спирали.
Если, наоборот, путевая устойчивость мала по сравнению с поперечной,
то угол скольжения будет уменьшаться медленно, а угол крена-быстро.
В момент, когда крен становится нулевым, положительное скольжение еще
останется, следовательно, самолет будет продолжать вращаться относительно продольной оси, увеличивая крен на левое полукрыло. Отрицательный угол крена приведет к скольжению на левое полукрыло,
появится положительный момент крена М х р и самолет начнет крениться
в обратную сторону и вызовет движение самолета змейкой.
Таким образом, требования к характеристикам путевой и поперечной
устойчивости, обеспечивающие динамическую спиральную и колебательную устойчивость, противоречивы. При увеличении спиральной устойчивости ухудшаются характеристики колебательного движения.
Обычно спиральное движение протекает очень медленно и слабо
ощущается пилотом даже в случае некоторой спиральной неустойчивости.
Напротив, колебания самолета по рысканию и крену с заметной частотой
значительно затрудняют пилотирование. Поэтому характеристики короткопериодического колебательного движения считаются более важными.
4.3. УПРАВЛЯЕМОСТЬ БОКОВОГО ДВИЖЕНИЯ
4.3.1. Характеристики управляемости бокового
движения
Статическая управляемость и балансировка бокового движения. Она
характеризуется усилиями и перемещениями педалей и штурвала для
выполнения маневра в боковой плоскости, которые отсчитывают от определенных балансировочных усилий и перемещений, обеспечивающих равновесие всех боковых сил, действующих вдоль оси О2, и моментов,
действующих относительно осей ОХ и ОУ. Режимы полета самолета,
в которых выполняются условия Е Р2 = О, Е М х = О, Е М у = 0, называют
балансировочными режимами бокового движения.
Рассмотрим условия балансировки бокового движения в прямолинейном полете самолета со скольжением, например, во время захода на
посадку с боковым ветром. Для создания скольжения необходимо от121
клонить руль направления на угол А5Н таким образом, чтобы выполнялось
условие равновесия моментов относительно оси ОУ:
Му = М ур + Му5н = 0.
'
(4.39)
Тогда с учетом выражений (1.26) и (1.35) получим балансировочное
отклонение руля направления:
т^ Д Р + т*» А5Я = О, Д5Н = - [ т^ /Ц» ] Д^.
(4.40)
Однако отклонение руля направления приведет также и к появлению
момента крена М х 5 , так как возникшая на руле направления поперечная
сила Д2К приложена" выше центра масс самолета. У самолета, обладающего
поперечной устойчивостью, возникнет стабилизирующий момент Мхр,
направленный на устранение угла скольжения кренением на отстающее
полукрыло. Для прекращения вращения самолета по крену необходимо
сбалансировать самолет по моментам относительно оси ОХ отклонением
элеронов на угол А6Э:
Тогда с учетом выражений (1.30), (1.46) и (4.41) получим балансировочное отклонение элеронов:
т§ Др + т5/ А8Э - [тх-т$/т^ Ар = 0,
^
Балансировочные зависимости А5Н (Р) и Д5Э (Р) (рис. 4.3) показывают, на
сколько градусов необходимо отклонить руль направления и элероны для
балансировки самолета в прямолинейном полете с заданным углом
скольжения. Однако для обеспечения прямолинейного полета необходимо
еще выполнить условие равновесия поперечных сил:
= 0.
(4.43)
лдн
10
Подставим в выражение (4.42) значение поперечной силы из (1.12) и получим соотношение между углами крена
и скольжения:
2
-10
-5
О
Рис. 4.3. Балансировочные зависимости по углу скольжения
122
Р= -2Свт^/с^рV .
(4.44)
Таким образом, для выполнения координированного скольжения при сохранении прямолинейного полета необходимо отклонением элеронов ввести самолет в крен, определяемый соотношением (4.43), в сторону скольжения. Тогда
выполнятся все условия сбалансированности бокового движения.
Потребные для балансировки самолета отклонения руля направления и эле-
ронов усилия и перемещения педалей и штурвала количественно характеризуют статическую боковую управляемость самолета. В качестве основных параметров используются градиенты усилий и перемещения педалей
и штурвала по скольжению Р^, х|, Р^, х!^ и крену Р* х*, Р|, х|.
Градиенты перемещений педалей по углам скольжения и крена хЦ и
X* показывают, на какую дополнительную величину нужно переместить
••* педали для изменения углов скольжения и крена на 1°:
5^/1сш.в.
(4.45)
Градиенты отклонения руля направления по углу скольжения и углу
крена и коэффициент штурвала по рулю направления, показывающий, на
сколько градусов отклоняется руль направления при перемещении педалей
на 1 мм, имеют вид:
кш.н = А8„/Ах н .
(4.46)
Градиенты усилий на педалях по углам скольжения и крена рЦ
и РН показывают, какое дополнительное усилие необходимо приложить
к педалям, чтобы изменить угол скольжения или угол крена на 1 °:
Р^ = АР„/Ар = х н Р Р^, Р1=АР н /Ау = х^Р Л н »,
(4.47)
где Р„в- градиент усилий на педалях, показывающий, как изменяются усилия при
перемещении педалей на 1 мм.
Градиенты перемещения штурвала по углам скольжения и крена х^
и х, показывают, на какую дополнительную величину нужно переместить
штурвал для изменения углов скольжения и крена на 1°:
5^/к ш , э .
(4.48)
Градиенты отклонения элеронов по углу скольжения и углу крена
и коэффициент штурвала по элеронам имеют вид:
кш.э = А5 э /Ах э .
(4.49)
м скольжения и крена
крен Р!,,
Градиенты усилий на штурвале по углам
ие необходимо прило
показывают, .какое дополнительное усилие
приложить
к штурвалу, чтобы изменить угол скольжения или угол крена на 1°:
х1Р"з%
(4.50)
где Р* -градиент усилий на штурвале, показывающий, как изменяются усилия при
перемещении штурвала на 1 мм.
э
У самолета, обладающего путевой и поперечной статической устойчивостью все градиенты должны быть отрицательными.
Динамическая управляемость бокового движения. Исследование реакции
самолета на ступенчатые отклонения элеронов и руля направления дает
объективную оценку динамической управляемости бокового движения.
Теоретические и экспериментальные исследования быстрого бокового
123
движения самолета по крену показывают, что оно с достаточной точностью
может быть описано экспоненциальной
функцией
ст [1 0,01
(4.51)
где Тшх- постоянная времени по угловой скорости крена; (юх)уст- установившееся значение
угловой скорости крена.
Выражение (4.51) описывает экспоненциальный процесс, представленный
на рис. 4.4. Основной характеристикой
динамической боковой управляемости в
быстром движении по крену является
время переходного процесса 1П, по истечении которого угловая скорость крена
будет отличаться от установившегося
значения на 5%:
Рис. 4.4. Переходные процессы при
ступенчатом отклонении элеронов
1=-1пО,05Т и
(4.52)
Быстрое колебательное движение по
перегрузке при отклонении элеронов или
рулей направления может быть описано скачкообразной затухающей синусоидой:
Дп2(1) = (Апг)ует[1 -
(4.53)
где (Дпг)уст-установившееся значение перегрузки; ю6-частота недемпфированных
боковых короткопериодических колебаний; фдг-фазовый угол сдвига.
Выражение (4.53) описывает скачкообразный колебательный процесс,
аналогичный представленному на рис. 3.4. Поэтому основными характеристиками динамической управляемости являются время срабатывания
1®р, время затухания 1®ат и относительное превышение перегрузки Айг.
4.3.2. Моделирование управляющих воздействий
в боковом движении
Передаточные функции самолета в быстром боковом вынужденном движении по управляющим воздействиям. Управление быстрым боковым движением самолета осуществляется путем отклонений элеронов А8Э, рулей
направления А6Н и органов управления боковой силой Д8г. Рассмотрим
модель быстрого бокового вынужденного движения самолета при наличии
управляющих воздействий:
124
Вектор-столбец входа по управляющим воздействиям в быстром
боковом движении
т
т
[•4б(*)] = [«в(0] = [Л§э(1) А6Н(1) А8Х(1)].'
(4.55)
Матрица входа по управляющим воздействиям в быстром боковом
движении
ашх6э
а
а Ю х б„
0
со у ,6 э
Чл
0
0
0
0
0
а
(4.56)
М2
0
Дополним уравнение состояния (4.54) уравнением выхода
(4.57)
у66(1) = С65х66(1),
где у ^(1)-вектор-столбец выхода в быстром боковом движении; См-матрица
выхода в быстром боковом движении.
Пусть вектор выхода у6б(1) совпадает с вектором переменных состояния
х66(1). Тогда Сбб = I, где I-единичная матрица одинаковой размерности
с вектором хбв(1). Применим к уравнениям (4.54) и (4.57) преобразование
Лапласа
рХ66(р) = А66Х66(р) + Х^О) +
Отсюда, исключая Х^р) и полагая
6
(Р), У66(р) = Х66(р).
(4.58)
= 0, найдем
(4.59)
Определим передаточную матрицу самолета в быстром боковом
движении по управляющим воздействиям:
= У6в (Р) / Щ6 (Р) = [р! - А66] - 1 В&6 = Ф66 (р) В^6 ,
(4.60)
1
где Ф66 (р) = [р! — А6б] ~ - переходная матрица состояния быстрого бокового движения самолета.
Элементами матрицы \^6(р) являются передаточные функции самолета,
соответствующие параметрам вектора выхода У6б(р)> которые совпадают
в рассматриваемом случае с вектором состояния быстрого бокового
движения Х66(р) по управляющим воздействиям 1Дв(р):
(4.61)
125
Элементы матрицы \\^6(р) определяются по отношению к «отрицательным» отклонениям А8Э, А8Н и А8г, что обусловлено принятым
направлением отсчета углов отклонения органов управления и возможностью показать в явном виде отрицательные обратные связи, возникающие в процессе управления самолетом:
'др
'др
А5э(р) '
А5н(р) '
Аюх(р)
Аю у (р)
А5г(р) '
А5Э(Р) '
Аюу(р)
Аюу(р)
А5Др) '
Ар(р)
АР( Р )
' др Ф) =
А5 Э (Р)'
А5 н (р)'
Ау( Р )
"Ду
А62(Р)
(4.62)
А5 Э ( Р )'
Ау(р)
Ау(р)
А5Н(Р)
А5 2 (р)'
Переходная матрица состояния быстрого бокового движения
~ , V
0>1 -
(4.63)
Определитель матрицы (р! —
О
А(р) =
г\
О
О
Р
"0>у,0)у
-ар,Иу
О
^й)
р-ар,р
0
= РФ - а Шх , Их )[(р - а т у , Ш у )(р - а р , р ) -
О
О
р
(4.64)
Присоединенная матрица определяется через алгебраические дополнения определителя А(р):
[р! - Аб6]пр =
Р[(Р - а Ш > С О )
126
Р(р-а И х , Ш х )
(р-ар,р)
а у > Ш х [(р-а И у ,о> у )(р-
(Р ~" а а у ,га у )
(4.65)
Тогда переходная матрица состояния
а
1 /(Р
ш х ,<в х )
О
N
Ф66(Р) =
О
ар^ащ^р/
а т х р(р
а Шу;Шу )/
/(р-атх,Щх)
/(р - а а х , И х )
[(р-а<о у>ту )
[(р-а Ш у , Ю у )
~ар,<ауае>у,р]
~ а р т у а т у р]
(р- а р,р)/
а Ш у ,р/С(Р-
/[(р-а Ш у , т у )
-а И у > ( В у )(р-
(р — ар р) —
~арр) —
~арШуаИур]
— ар 1Шу а Шу р]
а р , Щ у /[(р-
(р-а Ш г Ш у )/
-а Ш у , Ш у )(р-
/С(Р - а Шу>Шу )
~ а р,ш у а (о.„р]
1/Р
а Т , Щ х /Р
(Р - а Шх ,
а у , Шх /Р[(р -
(Р - а Ш у , т у )/
-а«,у,Шу)(р-
/р(р- а <о х , Ш х )
-а р ,р)-
[(р-аИу,<оу)(р-
(4.66)
127
а передаточная матрица-самолета в быстром боковом движении
~ {а<ох,8э[(Р ~ ао>у,Юу)
{ао>х,8в[(Р - а<оу,о>у)
а
Р,8 г а ю „,р
(Р- а Р,р)- а Р, И у а <о у ,р] ( Р - а р , р ) - а Р , ю у а ш у , р ] (Р- а о>„ш у )/
>-а Щ1 , И1 )(р-
-а ту , Шу )(р-а р>р )- ' - а р,и у а ту ,р]
а
р у ,5,(Р- а р,р)/
а
[(Р-а<оу,шу)
,«,у)(р-ар;р)-
(р-'ар,р)-
/(р- ш%,ш,)(Ра
Шу
-ар,(»уа(о,,р]
а
шу,8,(р-ар,р)/
/[(р- а <о у ,ш у )
/[(р-а«,у,а)у)
(р- а Р,р)~
(р-а р > р )а
а
ю у ,8 э а р,ео у /
а
а
рЛ
(р-а р , р )-
~~ р,«>у <оу,р]
а
а
га,,Р, а Р,« у /
аШу;р/
/[(р-аи,,шу)
—а
р,ш у а ш у ,р^
р,8 1 (Р~ а ш у ,ш /
/С(р-а Ю г < В у )
/[(р-ату,Щу1
(р-а р р )-
- а р,а у а и у ,р]
(р-ар,р)а
С(р-а и - > 0 ) )
о>,,р]
а
[(р- »у,Иу)
(р-' а р,р)-
а
а
ш,,8э р,юу
- а^.б.ар.оо,
(р- а р,р)"
а
(Р- Р,р)}/
[(Р - аоу,о,у)
(р-а м )-
128
(4.67)
Введем следующие характеристики.
Время недемпфированных боковых короткопериодических колебаний
Тр=
•
=—
—=
.
(4.68)
Относительный коэффициент демпфирования боковых короткопериодических колебаний
1
* <
л.
> /
Чр ~~ "~ ~ 1аш ,<о ~г а р , р ) V а ю у ,й) а р , р ~~ а р,ш а ю у ,р ~~
2,
= (М™' + Рг^ч/Му'Р^ — Му = ЬрТр = -2-.
(4.69)
Постоянная времени по угловой скорости крена
Ти, = —^— = - ^в;.
(4.70)
Коэффициент усиления по скорости крена в быстром боковом движении
при отклонении элеронов
2
А
^=^ = -Ж«Ч.ш,
М
(4-71)
х
Коэффициент усиления по угловой скорости крена Аю х через перекрестную связь по угловой скорости рыскания Аюу при отклонении элеронов
,А
Л-ГЛ
а
_
ГЛ
ш.,РаР,ю„ага.,8,
=
а
ш ж ,со, [ а о),,т у а р,р ~~ ар,о>, а<оу,р]
- -
МРМ8'
IV! у IV! у
-
(472)
Коэффициент усиления по угловой скорости рыскания при отклонении
элеронов
,6 3
К
_аю>18аар1р_
=-
Му'Р г>
т~гх-/1«,рР
хТгР-Г
-аР,а,аа,>р]
[Му'Р2_-Му]
1,'*-/:'/
Постоянная времени по углу рыскания
а — = - ЛтТ = —
5зак. 948
* Р,Р
?!
(4-74)
129
Коэффициент усиления по углу скольжения при отклонении элеронов
--,8,
Коэффициент усиления по углу крена Ау при отклонении элеронов
(4.76)
Коэффициент усиления по углу крена Ау через перекрестную связь
с угловой скоростью рыскания Асоу при отклонении элеронов
аю>ЛаМуам
_
__
Йу-Р^
~
*'
•
Коэффициент усиления по угловой скорости крена при отклонении
рулей направления
"
Коэффициент усиления по угловой скорости крена Асох при отклонении
рулей направления
(4.79)
Коэффициент усиления по угловой скорости рыскания при отклонении
рулей направления
80)
'8и)
Коэффициент усиления по углу скольжения А(3 при отклонении рулей
направления
]Л
р
а
Ул Р.о,
^У"
~ [а
г ,,<о ар,р-ар а |,]т ~ М
»-*ауеР
х>Р '
т
у
|т; Шу>
у Р 2 > -М у
м
*•
81)
^
Коэффициент усиления по углу крена Ау и угловой скорости рыскания
Асоу при отклонении рулей направления
130
ш
»-> «|
,-М]
Коэффициент усиления по угловой скорости крена Аюх при отклонении
органов управления боковой силой
ш у ,т у
(4.83)
Постоянная времени по угловой скорости рыскания Асоу
Т,„ = -
1
1
(4.84)
м?'
Коэффициент усиления самолета по угловой скорости рыскания Асоу при
отклонении органов управления боковой силой
_
(4 85)
а
а
а
а
[ ш у ,т у р,р ~ р,ш, о> у ,р]
Коэффициент усиления по углу скольжения Ар при отклонении органов
управления боковой силой
г. "''У
а
а
а
(4.86)
а
[ ш,,ш у р,р ~ Э,ш у (о,,р
С учетом введенных обозначений передаточные функции самолета
в быстром боковом движении сведены в табл. 4.1. Структурно-динаТаблица 4.1
Д5
А5 Э
Дсо, А5
5*
131
Окончание табл. 4.1
А5
XV (р)
Лео,
1с'
"•со,
А6
Ар
А5
А5Э
Ду
'Ду
'Ду
'Ду
._Ёг1
(т»
(Тш
(Т
мическая схема быстРого бокового движения самолета при управляющих
воздействиях представлена на рис. 4.5.
Передаточные функции самолета в траекторном боковом вынужденном
движении по управляющим параметрам быстрого бокового движения. Управ132
~
л 5,
г
*3
1
Т/р +2ТЖр+1
'Ч'Р
1
'Г<Уу
:,
Т~
Ай)у
л>
1
г
н.
^
'т-^./?у./и*. л-,^ и.
ГЛ^
Рис. 4.5. Структурно-динамическая схема быстрого бокового движения самолета при
отклонении элеронов
ление траекторным боковым движением осуществляется путем изменения
параметров быстрого бокового движения-угла крена Ду и угла скольжения
Др. Рассмотрим модель бокового траекторного движения самолета (4.16):
*6т(0 = А 6т х 6т (1) + В?тии1).
(4.87)
Вектор-столбец входа по управляющим воздействиям Др и Ау
Матрица входа по управляющим воздействиям ДР и Ду
О
ЙЧ",Р
О
-а р>7
а
(4.89)
Ч',7
О
Дополним уравнение состояния (4.87) уравнением выхода
(4.90)
где убт(1), С ^-соответственно вектор-столбец и матрица выхода в боковом траекторном движении. Причем С 6т = I, убт(1) = "бт(1)-
Определим передаточную матрицу самолета в боковом траекторном
движении по управляющим воздействиям:
(р) =
^т = Фбт (р) В^
(4.91)
133
где Ф6т(р) = (р! — А бт ) '-переходная матрица состояния бокового траекторного
движения самолета.
Элементами матрицы \У^Т (р) являются передаточные функции самолета
по управляющим воздействиям 11^т(р):
(4.92)
Переходная матрица состояния бокового траекторного движения
Определитель матрицы (р! — А 6т )
А(р) =
р
О
О
О
р
О
= р
(4.94)
Присоединенная матрица, определяемая через алгебраические дополнения определителя А(р), имеет вид
р2
(р!-А 6т ) пр
О
р
О
-а 2>ч ,
О
2
О
0.
р
(4.95)
2
ТогДа переходная^ матрица состояния
Ф6т(р) =
1/р
О
О
0
1/р
О
2
-а2>ч,/р
0
(4.96)
1/р ^
а передаточная матрица самолета в боковом траекторном движении
О
-ар,у/Р
(4.97)
О
134
а 2|Ч ,а рл /р 2
Введем следующие характеристики.
Коэффициент усиления по углу рыскания Д\|/ при изменении угла крена
Ду
.
.
ь;=-ам=-Р*.
(4.98)
Коэффициент усиления по углу пути ДЧ* при изменении угла скольжения
Д|3
4 = а,,,,р = -Р1
(4.99)
Коэффициент усиления по углу пути ДЧ* при изменении угла крена Ду
к^=аГу=-Р^.
(4.100)
Коэффициент усиления по углу пути Д*Р при изменении угла рыскания
Д\|/
14 = а 2>11 ,= - V 0 .
(4.101)
С учетом введенных обозначений передаточные функции самолета
в боковом траекторном движении по управляющим параметрам быстрого
бокового движения определим следующим образом:
(4-102)
Передаточные функции самолета в полном боковом вынужденном движении по управляющим воздействиям. Рассмотрим модель полного бокового вынужденного движения при наличии управляющих воздействий:
х6«) = А 6 х б (1) + ВХ(*Ь
(4.103)
У6(1) = х6(1).
(4-104)
Определим передаточную матрицу самолета в полном боковом движении по управляющим воздействиям
Щ(р)
(4.Ю5)
где Фб(р) = (р! — А6)~ ' -переходная матрица состояния бокового движения самолета.
Определение матриц Фб(р) и Щ(Р) связано с обращением матрицы
(р! — А6), что при ее высокой размерности (7 х 7) довольно затруднительно. Если пренебречь медленным спиральным движением и воспользоваться результатами, полученными в первой и во второй частях данного
параграфа, то задача существенно упрощается:
135
(4. 106)
(р) =
Тогда передаточные функции самолета в полном боковом движении по
управляющим воздействиям сведем в табл. 4.2.
Таблица 4.2.
Ад
А5
^дДр) =
" <"(р)=^
2
1)(Т рР
А5
136
^дч-'(Р) =
2
Окончание табл. 4.2
\У(р)
Д6
5
А5.
дш \
Д8.
=
»|
=
4(Т Юд р-Ц)(Т ш>Р
,Р + 1)(Т|р2
Д5,
э
2
. . _
(О)
Д2 Д5,
3
Р
Д5,
(Т й > р+1)(Т
2
2
рР
+2Т р ^р+1)
Лр) =
Реакция само пета на ступенчатые отклонения органов управления в боковом быстром движении. Реакция самолета на управляющие воздействия
в боковом движении зависит от его аэродинамических характеристик,
а также от динамических характеристик самих управляющих воздействий.
Маневр самолета в боковой плоскости осуществляется энергичным
отклонением элеронов Д5Э, руля направления Д8Н или органа управления
боковой силой Д6г. При этом закон изменения Д6Э, Д5Н и Д6г близок
к скачкообразному, т. е. к ступенчатому. Рассмотрим реакцию самолета на
ступенчатое отклонение элеронов Д5^.
Единичное изменение Дбэ (I) = 1 (I), изображение которого по Лапласу
^э(р) = 1/Р> описывает переходные функции по параметРам быстРого
бокового движения:
137
Ашх(р) =
^и (Тш р + 1)
лх
Асоу (р) = А5Э (р) >У & (р) = - — - ,
(4. 107)
,8,
Ар (р) = Д5Э (р) А<' (р) =
Установившееся значение угловой скорости крена при отклонении
элеронов
(Дсох)уст = Шп р -- : - = к ' = - — .
(4. 108)
"
Так как угол крена равен интегралу скорости крена, то реакцией
самолета в изолированном движении крена на ступенчатое отклонение
элеронов будет равномерное нарастание угла крена.
В общем случае условия изолированности кренового движения не
выполняются и реакция самолета по угловой скорости крена на ступенчатое отклонение элеронов будет отличаться от рассмотренного.
Если самолет обладает поперечной статической устойчивостью и при
отклонении элеронов на положительный угол момент рыскания от элеро_
5
"
о
нов тоже положителен (Мкэх > 0), то к^ > 0 и установившаяся угловая
скорость крена возрастает по сравнению* с рассмотренным случаем изолированного движения крена из-за взаимодействия движений крена и рыскания. Такое влияние движения рыскания на. движение крена приводит
к раскачке самолета и ухудшению его поперечной управляемости, несмотря
на кажущееся увеличение эффективности управления.
Объяснение этого явления следующее. При А8Э > 0 возникает положительный момент рыскания Му5 > 0, под действием которого самолет
приобретает положительную угловую скорость рыскания Аоау > 0 и, как
следствие, положительное приращение угла скольжения Ар > 0. Из-за
положительного скольжения возникает отрицательный момент крена
М х р < 0 (так как Мх < 0 у статически устойчивого самолета), который
складывается с отрицательным моментом Мх° А5Э < 0. Это приводит
к дополнительной «подкрутке» самолета.
Если при наличии у самолета поперечной статической устойчивости
отклонение элеронов на положительный угол вызывает отрицательный
момент рыскания (Му5з < 0), то к^щ < О и установившаяся угловая скорость крена уменьшается по сравнению со значением в изолированном
движении крена. Такое взаимодействие движений рыскания и крена приводит к явлению «зависания» самолета по крену, когда при отклонении
138
элеронов угол крена поначалу возрастает, а затем его рост замедляется.
Может установиться и постоянное значение угла крена. Это приводит к уменьшению эффективности поперечного управления.
Наконец, если кш'1)(0у < 0 и к^ > к^,
возникает обратная реакция самолета
на отклонение элеронов. Это объясняется тем, что момент Му8 < О
будет вызывать отрицательную угло'вую
скорость рыскания Аюу < 0 и отрицательный угол скольжения Др < 0.
Поэтому возникает положительный
момент крена М х р > 0, который будет
тормозить движение крена или даже
изменит его направление.
Реакция самолета по угловой скорости крена и углу крена на ступенчатое отклонение элеронов показана на рис. 4.6. Типичным для современных самолетов со стреловидными
крыльями является кривая 2. С увеличением угла атаки самолета увеличивается взаимное влияние движений Рис. 4.6. Реакция самолета по углорыскания и крена, сильнее проявляется вой скорости крена и углу крена на
ступенчатое отклонение элеронов:
«зависание».
/, 2-самолет с прямой реакцией; 3Реакция самолета на ступенчатое самолет с «зависающей» реакцией; 4самолет
с обратной реакцией
отклонение руля направления в боковом быстром движении. Единичное изменение А5Н = 1(1), изображение которого по Лапласу А5н(р) = 1/р, описывает переходные функции по параметрам быстрого бокового движения:
(4.109)
Ду (р) = Д6Н
" (р) = ~ Дшх (р) .
139
После окончания боковых короткопериодических колебаний сформируются новые установившиеся значения параметров быстрого бокового
движения:
(Дсйх)уст = (к' + к" Л ) Д8Н , (Дод^ = к ' Д8Н ,
(4. 1 10)
Из анализа переходных функций (4.109) видно, что реакция самолета
в быстром боковом движении по угловой скорости рыскания Дшу и углу
скольжения Лр на ступенчатое отклонение руля направления аналогична
реакции самолета в продольном короткопериодическом движении по угловой скорости тангажа Доог и углу атаки Да на ступенчатое отклонение руля
высоты:
1
Ду (р) = Д8Э (р) \ (р) = - - - - - . (4. 1 1 1)
После окончания боковых короткопериодических колебаний произойдет
формирование новых установившихся значений параметров быстрого бокового движения
(Дсох)ус1 = Ит (РД8э(р)^(р)} = 04 + 14,Иу)Л8э,
р-О
(Дсоу)усТ = Нт (рД8э (р) \УДш° (р)} = Кщ Д8Э,
(4.112)
р-О
(Ду)ус1 = Нт {рД8э (р) \Удр' (р)} = Кр' Д8 Э .
р-О
Угол крена будет нарастать. Если отклонение элеронов не вызывает
изменения угловой скорости рыскания (Му' = 0) или самолет нейтрален
в отношении поперечной статической устойчивости (М* = 0), то при отклонении элеронов в соответствии с принятыми допущениями (яп а = О,
т™" = 0, т™' = 0) возникнет изолированное движение крена.
Тогда (КщЛ = 0, Кщ; = 0, Кр' = 0) передаточная функция самолета по
угловой скорости крена при отклонении элеронов принимает вид
ЛЯ
*<0.
(4-113)
а переходный процесс после мгновенного ступенчатого отклонения элеронов на 1° определится следующим образом:
(4.114)
140
Поэтому вид переходных процессов
Ад,
и динамические характеристики путевой
устойчивости самолета в быстром бо- ——
ковом движении аналогичны переходным Процессам и динамическим ларактеристикам продольной устойчивости
йи>
самолета (рис. 4.7). Однако руль на>
правления при управлении боковым движением играет в основном вспомогаДш*у>
тельную роль И для управления рысканием почти не используется. Требования
к реакции самолета по угловой скорости
крена при отклонении руля направления
более критичны.
Прямая или обратная реакция по угловой скорости крена и по углу крена определяется значением и знаком
момента крена от руля направления
Мх"Л§н. Если у самолета, обладающего
поперечной и путевой устойчивостью Рис. 4.7. Переходные процессы и
М^" < 0, то к*» ^ < 0 и установившаяся динамические характеристики путеугловая скорость крена уменьшается за вой устойчивости самолета
счет взаимовлияния движений крена и
рыскания. Это будет способствовать
появлению обратной реакции самолета по углу крена. Следовательно, при
«даче левой педали» пилотом (отклонение руля направления влево) может
появиться правый крен. Такое явление может возникнуть при уменьшении
поперечной устойчивости и увеличении по модулю производной М*% что
наиболее вероятно при полете самолета на малых углах атаки.
4.4. ВНЕШНИЕ ВОЗМУЩЕНИЯ В БОКОВОМ ДВИЖЕНИИ
4.4.1. Влияние эксплуатационных факторов на боковое
движение
Эксплуатационные факторы и боковая устойчивость самолета. Степень
путевой статической устойчивости по углу скольжения зависит в основном
от относительных координат центра масс самолета хт и фокуса х рр .
Положение фокуса определяется конструктивными особенностями самолета, конфигурацией, числом М полета, скоростью и т. д. Положение центра
масс меняется в полете в широких пределах по мере выработки топлива,
а также зависит от размещения пассажиров и грузов.
При передних центровках путевая статическая устойчивость самолета
выше, что требует от пилота больших расходов перемещения педалей
141
и руля направления. При этом, если руль уже находился в отклоненном
балансировочном положении, может оказаться ограниченным боковой
маневр. Кроме того, смещение центра масс вперед увеличивает период
и частоту собственных боковых короткопериодических колебаний, проявляется «голландский шаг».
При задних центровках путевая статическая устойчивость самолета
меньше и самолет недостаточно сопротивляется изменению угла скольжения, например, при боковом ветре. Самолет становится излишне чувствительным к отклонению руля направления и неосторожное отклонение
педалей пилотом может вывести самолет за пределы установленных
ограничений по боковой перегрузке и углу крена.
Изменение числа ДО полета и скорости проявляется в перемещении
фокуса по углу скольжения.
Степень поперечной статической устойчивости по углу скольжения
зависит в основном от конструктивных особенностей самолета. Существенное влияние на характеристики динамической путевой и поперечной
устойчивости оказывают демпфирующие и спиральные моменты, которые
также определяются конструктивными особенностями самолета.
Таким образом, улучшить боковую устойчивость самолета с помощью
автоматических средств можно путем автоматического отклонения рулей
направления и элеронов в функции угловых скоростей рыскания и крена,
боковой перегрузки и т. д. При этом вводится автоматическое ограничение
отклонения руля направления, демпфируются колебания конструкции
крыла.
Эксплуатационные факторы и боковая балансировка и управляемость
самолета. Основными эксплуатационными факторами, влияющими на боковую балансировку, являются боковой ветер, отказ двигателя, несимметричный выпуск закрылков, обледенение и т. д. Влияние бокового ветра
проявляется в увеличении угла скольжения, которое парируется соответствующим отклонением руля направления и элеронов. При этом ограничиваются возможности бокового маневра. Кроме того, возникает косая
отдувка воздушного винта и воздухозаборника двигателя, что приводит
к появлению боковых составляющих тяги и моменту рыскания от тяги
двигателей.
При отказе двигателя самолет разворачивается в сторону отказавшего
двигателя с одновременным накренением на крыло с отказавшим двигателем. Этому способствует возникновение момента крена, обусловленного
поперечной устойчивостью и поперечного момента, вызванного асимметрией обдува полукрыльев. Для балансировки самолета необходимо соответствующее отклонение элеронов и руля направления. При этом принципиально возможен прямолинейный горизонтальный полет со скольжением
на отказавший двигатель, без скольжения и со скольжением на работающий двигатель. Последний случай считается более целесообразным, тогда
самолет летит с небольшим положительным углом крена, положительным
углом отклонения руля направления и отрицательным углом отклонения
элеронов.
142
При несимметричном выпуске закрылков у самолета появляется крен
вследствие разных подъемных сил на полукрыльях, который должен
компенсироваться отклонением элеронов. При обледенении носка киля
возникает срыв на вертикальном оперении, фокус самолета по углу скольжения смещается вперед, уменьшая путевую устойчивость, усилия на
педалях уменьшаются.
Изменение скорости, числа М и высоты полета приводит к изменению
градиентов усилий и перемещений на педалях и штурвале вследствие
различного действия набегающего потока воздуха. В результате характеристики боковой управляемости оказываются переменными и для создания
одного и того же угла скольжения и боковой перегрузки пилот должен
прикладывать к педалям и штурвалу различные усилия на различных
режимах полета.
Задача обеспечения боковой балансировки и улучшения боковой управляемости решается автоматическими средствами соответствующим отклонением руля направления и элеронов в функции боковой перегрузки,
а также изменением коэффициентов штурвала в функции скорости полета
и высоты.
4.4.2. Моделирование внешних возмущений
в боковом движении
Передаточные функции самолета в быстром боковом вынужденном движении по внешним возмущениям. Появление вынужденной составляющей
в боковом быстром движении обусловлено в основном действием внешней
боковой силы ДГг, внешних моментов крена Атхв и рыскания Атув, угла
скольжения Др1^ и скорости угла скольжения Др\, из-за действия ветра.
Рассмотрим модель бокового быстрого вынужденного движения самолета при наличии внешних возмущений:
х66 (I) = А66хб6 (I) + В?6и!6 (I).
(4.115)
Вектор-столбец входа по внешним возмущениям в боковом быстром
движении
= [ДГД1) Дтхв(1)Дтув(1) Др\Д1)Др\ДО] -
(4-116)
Матрица входа по внешним возмущениям в боковом быстром движении
о
о
о
о
о
о
,тув аюА
Шу
0
О
а
Р,Р„
О
о
о
^р,
(4.117)
0.
143
С учетом уравнения выхода (4.57) определим передаточную матрицу
самолета в боковом быстром движении по внешним возмущениям при
нулевых начальных условиях:
У--ГгЛ
(4.118)
Элементами матрицы \УЦб (р) являются передаточные функции самолета
по соответствующим параметрам вектора выхода Убб(р)> совпадающего
в рассматриваемом случае с вектором переменных состояния бокового
быстрого движения Хбб(р) при действии внешних возмущений Чбб(р).
Так как переходная матрица Ф6в(р) определена выражением (4.66),
вычисление передаточной матрицы \У§6 (р) не представляет трудностей.
Введем следующие обозначения (табл. 4.3 и 4.4):
к^Дю", Кщ1", Кщ", ^"-коэффициенты усиления по угловой скорости крена
Ао^ при "действии соответственно внешней боковой силы ДГг, внешнего
момента крена Атхв, внешнего момента рыскания Атув, с боковой составляющей ветра в виде Ар ж и скорости угла скольжения ДРЖ;
к„"?ш, Кщ"р- коэффициенты усиления по угловой скорости крена Асох
и перекрестной связи соответственно с угловой скоростью рыскания Аооу
и углом скольжения Ар при действии боковой составляющей ветра в виде
угла скольжения ДРЖ;
^и > О", ^ш"> Кщ"-коэффициенты усиления по угловой скорости рыскания
Асоу при действии соответственно внешней боковой силы АГг, внешнего
момента рыскания Атув, боковой составляющей ветра в виде угла скольжения АР Ж и скорости угла скольжения Ар ж ;
1ср, 1с"™, 1ср , Ь;^ - коэффициенты усиления по углу скольжения Ар при
действии соответственно внешней боковой силы АГг, внешнего момента
рыскания Ат ув , боковой составляющей ветра в виде угла скольжения Ар,,
и скорости угла скольжения Др ж ;
^ш ,р ~ коэффициент усиления по угловой скорости рыскания Аю у и перекрестной связи с углом скольжения Ар при действии боковой составляющей
ветра Ар ж ;
1срш -коэффициент усиления по углу скольжения Ар и перекрестной
связи с угловой скоростью рыскания Аюу при действии боковой составляющей ветра.
Таблица 4.3
Определение
Примечание
— т
МX
144
/1г»(й
/МХ
Продолжение табл. 4.3
Определение
Примечание
а
;
р,юу
а
р,р„аш„рашу,соу
"•/Л
Саюу,и,ар,р - ар,
х
р
му -мх
р
ьР.
к,Л г
-М]
а
Р,Г,ашгР
а
ю,,юуар,р ~ ар,ш,аюу,[
1ср"
*-гл
-
а
с
Р,со
о уаао)у,Р
с (о
у
а
юу,ш,ар,р - ар,юуага,,р
145
Окончание табл. 4.3
1с
Определение
Примечание
, р„
Ч.РаР,р„
мурргр;
а
а
а
М^-МР,
а
ш у ,ю у р,р - Р,и, (о,.Р
Ч,ш, р,1;
**№,
гау,соуар,р - а р,ш у а ш у ,Р
м^Р2р.-мур
4*
а
р
а
р,шуашу,т,в
мурмут-
(о,,шуар,р — ар,шуаш,,р
м"'Р - му
т1
Ьп ™
а
р
а
а,у,туар,Р„
м^Р2р;
<оу,соуар,р - ар,«.уашу,р
1ЙУШ'Р2Р, - МуР
а
р
^
а
соу,Иуар,р„
м°'?1;
шу,шуар,р ~ ар,шуаш,,р
иу>?1 - м^
а
Кв*
а
му<
а
Р,«уао),,Р„
4»
а
а
а
а
ш,,шу р,р - р,м у ш у ,Р
Р
М^Рг - Му
Р
Т а б л и ц а 4.4
Дюх
V111
Дтх,
146
Продолжение табл. 4.4
XV (р)
Дсо,
Дт ув
V»
',и + фр (Тш р
№(
*Дш.»
ж
у
ж
Т2рр2
Дтув
2
Трр
Аю
Тр2 + 2 Т ^ р + 1
Трр 2 + 2Тр^рр + 1
др
1Ш
"
Дт ув
Т2рр2
147
Окончание табл. 4.4
>У(р)
АР
Трр
2
...Дт . .
\УДу-(р) =
Р(Т т ж р+1)
Ду
Лт
"Ду1
Р
(Т Мх р
р (Тю>р
4
«г ^(Р) = ^Ду
Передаточные функция самолета в полном боковом вынужденном движений по внешним возмущениям. Передаточные функции самолета по
траекторным параметрам Ау, АЧ* и Аг При действии внешних возмущений
имеют вид:
148
-
(4.119)
г
Передаточные функции ^Ду (р), \Удр(р) уже получены и имеются в
табл. 4.4. Аналогичным образом получаются передаточные функции \У"«
(табл. 4.5).
Т а б л и ц а 4.5
Дтх
Д\1/
'Ду
т
у
Ь4-Х
1с "
Дт
АР»
АР»
+ 2ТР^РР + !) + ^'.о. + Фр (Т»? + 1)
Лй
Р
" ^
ч_
XV'•Д$„/
Ду (Р) ~ "
' Сп1
Р + 1)(Тт р + 1) + 4^ (Ти Р + 1)
ж
Дт1В
149
Окончание табл. 4.5
"ё
Дтув
АР,
(Р)
„,т , .
"
\Р* ~~
№
^ »"( V
1)]
4^р" (Тшур + 1) (Тт р
'
^'(Р) = -
Дт
Р 3 (Т Ш Р+1)
Дг
Ат
Дг Ф^
,Д0„,
*Дг (
150
Реакция самолета на импульсные возмущения в виде внешней боковой
силы и внешних моментов крена и рыскания. Пусть на самолет подействовало импульсное возмущение по внешней боковой силе АГ2(1) = 5(1)АГ2.
Наличие или отсутствие статических ошибок в быстром боковом движении
определим с учетом того, что АГ г (р) = АГ г . Тогда
(Асох)уст = 11т {РДГг(р)\
(Дсоу)уст = Нт { Р А4(Р)\
р-*0 /"
р->0
р 1
г
(р)} =
(р)} = 0,
(4.120)
р '
Ду у с т =Нт{рД1
г
р-О
Таким образом, при импульсном воздействии боковой силы Ыг самолет
астатичен по угловым скоростям Асе.,, Аю у , углу скольжения Ар, а по углу
крена имеет статическую ошибку Ау у с т ф 0. В результате постоянно изменяются углы рыскания А\|/, пути АЧ* и линейного бокового отклонения Аг,
так как
Дц/уст = Нт {рАууСт(р)Х^(р)} = Нт <р—
Р-О
-*о (.
рр
Р
\
рр ^•
ДЧ>УСТ = Нт {р Ау У ст (Р) ТУ& (Р)} -> оо,
•
00,
(4.121)
Дгуст = Нт {р Ау усТ (р) \У^ (р)} -> оо.
р-О
Таким образом, импульсная внешняя боковая сила изменяет боковую
траекторию полета самолета. Для парирования этого возмущения требуется вмешательство пилота или автоматики.
151
Рассмотрим реакцию самолета на импульсное возмущение по внешнему
моменту крена Дт1В (1) = 8 (I) Атхв:
(Дсох)у„ = 11т {рДтхв(р)\У^»(р)} =
р-О
= Атхв Нт \ - > -> 0 ,
Ау уст = 11т {рДт„ (р) \<> (р)} = С" Ати .
р^О
(4. 122)
Статическая ошибка по углу крена Дууст вызывает изменения траекторных параметров Д\|/уст, АЧ*уст, Д2уст. Для возвращения самолета к опорной
траектории требуется отклонение элеронов пилотом или автоматикой.
Импульсное возмущение по внешнему моменту рыскания Атув(1) =
= 5 (I) Атув приводит к аналогичным последствиям.
Реакция самолета на ступенчатое возмущение в виде внешней боковой
силы и внешних моментов крена и рыскания. Пусть на самолет подействовал
ступенчатый внешний момент крена Атхв(1) = Аюхв1(1). Тогда с учетом
того, что Атхв(р) = Атхв/р,
(Аюх)уст = Нт {рДтхв(р)\Уд™»(р)} =
р-О
Г
Р1Ч"(Т<»ХР + 1)
1
т
= Атхв 1ип 1 - - - > = к,,» Атхв ,
Р
1
2
2
" * °
^
Аууст = Нт {р Атхв (р)
р->0
» (р)} - оо .
(4. 123)
При ступенчатом воздействии внешнего момента крена Атхв возникает
статическая ошибка по угловой скорости крена Асох и самолет становится
неустойчивым по углу крена Ау. О выдерживании траектории уже не
приходится говорить. Для возвращения самолета к опорным значениям
• Асох и Ау требуется экстренное отклонение элеронов пилотом или автоматикой.
При ступенчатом воздействии внешнего момента рыскания Атув(1) =
= Атув1(1):
(До>х)уст = к™"Атув, (Асоу)уст = к™-Ат ув ,
Друст = к^'- Ат ув) Ду уст -* оо .
(4. 124)
Самолет также становится неустойчивым по крену. Действие ступенчатой внешней боковой силы АГг(1) = АГ21 (I) аналогично,
Реакция самолета на боковые ветровые возмущения. Анализ реакции
самолета на боковые ветровые возмущения аналогичен анализу реакции
152
самолета на вертикальные ветровые возмущения (см. § 3.6) Если на
самолет подействует боковое ветровое возмущение в форме ступеньки
0 = Д\Уг1 (I) или Држ(1) = ДР„1 (I), то
Ш1
V
"К Т"1
-
' "
/
(4.125)
81П фб
Причем в начальный момент времени приращение угла скольжения
Др (0) = ДР„ = — Д\У2/У° максимально. В конце короткопериодического
движения угол скольжения возвращается к исходному опорному значению.
Аналогичным образом происходит возвращение к опорным значениям
других параметров быстрого бокового движения. Самолет астатичен при
ступенчатом воздействии ветра по параметрам быстрого бокового движения. Однако направление движения самолета изменится. Возникает статическая ошибка по углу пути ДЧ^. После окончания переходного процесса
самолет будет сносить со скоростью, равной скорости ветра. Величина Ду
при этом будет характеризовать так называемый угол сноса. Линейное
боковое отклонение Дг уст будет нарастать.
Для компенсации сноса пилот или автоматика должны отклонить
элероны или руль направления, чтобы самолет развернулся по курсу
навстречу ветру на угол Д\|/ =
Контрольные вопросы
1. Поясните физический смысл возникновения и развития собственного и вынужденного бокового движения.
2. Каковы условия выделения быстрой и медленной составляющих бокового
движения?
3. Определите характеристики статической и динамической устойчивости бокового движения.
4. Каковы условия устойчивости быстрого кренового движения, медленного
спирального движения, быстрого колебательного движения?
5. Определите характеристики управляемости бокового движения и условия
балансировки.
6. Как получить передаточные функции самолета в быстром креповом движении
по отклонению элеронов?
7. Какова реакция самолета на ступенчатое отклонение органов управления
в быстром боковом движении?
8. Объясните необходимость вмешательства пилота или автоматики в процесс
управления боковым движением в условиях действия внешних возмущений.
Р А З Д Е Л II
АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ
ПОЛЕТОМ
Глава 5
АВТОМАТИЗИРрВАННОЕ УПРАВЛЕНИЕ РУЛЯМИ
'" В любом процессе управления участвуют объект и субъект управления.
В режиме ручного управления самолетом субъектом управления является
пилот. В режиме автоматизированного управления самолетом субъекты
управления-пилот и комплекс автоматизированных средств улучшения
устойчивости и управляемости. В режиме автоматического управления
самолетом субъектами управления являются система автоматического
управления и пилотажно-навигационный комплекс. Как в режиме ручного,
так в режимах автоматизированного и автоматического управления задействована система управления полетом самолета. Дадим общую характеристику этой системе и определим особенности взаимодействия с ней
исполнительных устройств автоматики.
51. УПРАВЛЕНИЕ ПОЛЕТОМ И РУЛЯМИ
Состав систем управления полетом. Система управления полетом (СУП)
Самолета представляет собой комплекс устройств самолета, обеспечивающих его устойчивость и управляемость на всех этапах и режимах полета.
В состав СУП входят следующие основные системы:
система управления рулями самолета-совокупность устройств управления самолетом, обеспечивающих управление рулями всех видов (рулями
высоты, направления, элеронами, элерон-интерцепторами, спойлерами);
система управления стабилизатором самолета-совокупность устройств, обеспечивающих изменение угла установки стабилизатора;
система управления механизацией крыла самолета-совокупность устройств, обеспечивающих отклонение средств механизации крыла, изменяющих его аэродинамические характеристики (закрылков, предкрылков,
тормозных щитков и т. д.);
система триммирования усилий-совокупность устройств, обеспечивающих уменьшение усилий на рычагах управления путем отклонения триммеров или обжатия механизмов загрузки рычагов управления (колонки
и баранки штурвала, педалей);
система управления двигателями самолета-совокупность устройств,
обеспечивающих управление двигателями и агрегатами силовой установки.
154
СУП состоит из механической части управления и системы автоматического управления. Рассмотрим систему управления рулями самолета.
Механическая часть системы включает рычаги управления, рулевые приводы, загрузочные устройства, механические устройства для изменения передаточных отношений 1сщ, механизмы зависания и т.д.
Виды системы управления рулями. Существуют три основных вида
систем управления рулями: прямые обратимые системы, бустерные системы и электродистанционные системы.
Прямые обратимые системы -управления рулями реализуют жесткую
кинематическую связь рычагов управления с управляющими поверхностями. На рис. 5.1,а представлена прямая обратимая система управления
рулем высоты РВ. Отклонение пилотом колонки штурвала (КШ)х„ через
механические тяги и качалки передается на руль. Отклонение руля высоты
5В вызывает появление аэродинамического управляющего момента Мг8_.
Давление встречного потока воздуха на отклоненном руле дает усилие,,
противодействующее отклонению колонки штурвала. Усилие на колонке
является основным параметром, информирующим пилота о процессе
управления. Ощущение перегрузки позволяет пилоту выполнять необходимое маневрирование или компенсацию возмущений любого происхождения, выводящих самолет из состояния установившегося полета.
Эффективность рулевых органов, определяемая приращением коэффициента соответствующего момента при полном отклонении органа
управления от нейтрального положения, возрастает пропорционально
квадрату скорости согласно (1.5).
Соответственно градиенты перемещений и усилий на рычагах управления убывают пропорционально квадрату скорости. Большие градиенты
перемещений и усилий на малых скоростях полета делают самолет «вялым» в управлении. Для лучшего восприятия пилотом малых отклонений
рычагов управления в проводку управления встраиваются механизмы
загрузки (МЗ) пружинного типа с предварительной затяжкой пружины.
Малые градиенты перемещений и усилий на больших скоростях полета
делают самолет слишком «строгим» в управлении. Поэтому характеристику обжатия пружины МЗ делают нелинейной. Малому отклонению рычага
Рис. 5.1. Прямая обратимая система управления рулем высоты:
я -без триммирования усилий; б-с механическим триммированием усилий
155
управления соответствует большое отклонение руля, большему отклонению рычага управления-малое отклонение руля (рис. 5.2).
В установившемся режиме полета руль должен находиться в балансировочном положении. При изменении режима полета или при внешних
воздействиях руль необходимо отклонить в новое балансировочное положение. Для этого пилот отклоняет рычаг управления и удерживает его
в новом положении, прикладывая постоянные усилия, компенсирующие
шарнирные моменты руля. Эти длительно прикладываемые к рычагу
управления усилия снимаются отклонением триммеров-вспомогательных
рулевых поверхностей. На рис. 5.1,6 представлена прямая обратимая
система управления рулем высоты с механическим триммированием усилий
отклонением триммера. Вращение пилотом триммерного штурвала (ШТ)
через тросовую проводку и качалку передается на триммер. Отклонение
триммера 5Т вызывает появление аэродинамического управляющего момента М г5 . Давление встречного потока воздуха на отклоненном триммере
дает усилие, противоположное усилию, возникшему на рычаге управления
при его отклонении. Поэтому пилот может вернуть руль в прежнее
положение, сняв усилие с рычага управления.
Бустерные системы управления рулями реализуют жесткую кинематическую связь рычагов управления с распределительными устройствами
рулевых приводов (РП)- бустеров. Рулевые приводы представляют собой
гидромеханические усилители мощности. Они уменьшают или полностью
снимают усилия на рычагах управления, воспринимая частично или полностью шарнирный момент рулевых поверхностей.
Наибольшее распространение получила бустерная необратимая схема
системы управления (рис. 5.3). При такой схеме рычаг управления соединяется тягой непосредственно с золотником бустера, а бустер воспринимает
весь шарнирный момент. Пилот прикладывает к колонке штурвала незначительное усилие для преодоления сил трения в механической проводке
управления и в золотнике бустера. Аэродинамический шарнирный момент
не ощущается пилотом, так как он полностью передается на конструкцию
самолета через опору бустера. При этом обратная связь по усилию от
рулевой поверхности к колонке штурвала, как эго было в прямой обратимой системе, отсутствует. Это вызывает потерю пилотом ощущения
выполняемых самолетом режимов полета. Поэтому в проводку управления
-100
ко
О
100
ОТ.у
100
200
156
-50
-100
Рис. 5.2. Характеристики загружателя руля высоты:
1-линейная; 2-е повышенным градиентом усилий в начале обжатия механизма
'мз
Рис. 5.3. Бустерная необратимая система управления рулем высоты:
а-без триммирования усилий; б-с электромеханическим триммированием усилий поджатием
механизма загрузки
встраиваются механизмы загрузки пружинного типа, которые искусственно
создают определенные усилия на рычагах управления. Таким образом
у пилота создается «чувство управления». Механизм загрузки обеспечивает
адекватность усилия на рычаге управления отклонению рулевой поверхности и предупреждает пилота о возможности вывода руля на уровень
ограничения.
В простейшем случае механизм загрузки имеет линейную характеристику обжатия. Однако это не обеспечивает желаемого постоянства градиентов
перемещений и усилий при изменении режимов полета. Поэтому применяются механизмы загрузки с предварительным поджатием пружин и с изломом характеристик загрузки (см. рис. 5.2). Широко используется подключение двух загружателей с разными жесткостями пружин (рис. 5.3,6).
Основной полетной загружатель МЗХ создает усилие на всех эксплуатационных режимах полета. Для предупреждения пилота и предотвращения
выхода самолета за допустимые углы атаки в крейсерском полете при
определенном ходе колонки подключается пружина дополнительного полетного загружателя М32, увеличивающая нагрузку на колонке штурвала
при сохранении градиента усилия по ходу колонки.
При наличии необратимой бустерной системы управления рулями для
триммирования усилий используется «эффект триммирования». При этом
дополнительные триммерные поверхности на рулях отсутствуют, а снятие
усилий с рычагов управления осуществляется поджатием механизма загрузки электромаханическим механизмом эффекта триммирования (МЭТ). На
РИС. 5.3,6 представлена такая бустерная необратимая система управления
рулем высоты. Нажимая на тангенту триммирования, пилот управляет электродвигателем МЭТ. который выдвигает свой шток и поджимает
механизм загрузки. Колонка штурвала перемещается в новое балансировочное положение ;: усилие, необходимое для удержания руля в соответствующем балансировочном положении, обеспечивается поджатой МЭТ
пружиной. В определенном диапазоне триммирования усилия снимаются
с помощью МЭТ (рис. 5.4).
Механические прямые и бустерные системы управления стали чрезвычайно сложными по своей кинематической схеме. Они содержат десятки
тяг, качалок, шарниров и других механических устройств, которые к тому
157
Рис. 5.4. Характеристики загружателя руля высоты с учетом триммирования:
/-основной загружатель;
тельный загружатель
2-дополви-
же из соображений надежности дублируются и троируются. Такая сложная
механическая система имеет значительную массу, заметную упругость
и восприимчивость к крутильно-изгибным деформациям самолета. Таким
системам объективно присущи люфты, влияние трения в проводках и ряд
других недостатков. Однако в силу высокой конструктивной и технологической отработанности, а также высокой надежности механические системы
управления широко используются на современных самолетах. Тем не
менее необходимость снижения массы и новые функциональные требования обусловили переход на немеханические системы управления.
Электродистанционные системы управления рулями (ЭДСУ) реализуют
электромеханическую связь рычагов управления с распределительными
устройствами рулевых агрегатов (РА). Рулевые агрегаты представляют
собой электрогидравлические усилители мощности, преобразующие электрические управляющие сигналы в перемещение механической проводки.
Усилие, создаваемое пилотом при отклонении колонки штурвала, преобразуется датчиком усилий (ДУ) в электрический сигнал. Этот сигнал поступает в вычислитель блока управления (БУ), который формирует управляющий электрический сигнал на рулевой агрегат (рис. 5.5). Рулевой агрегат
преобразует управляющий сигнал в перемещение механической проводки
и входного звена рулевого привода. Рулевой привод усиливает мощность
сигнала и отклоняет руль. Так как весь шарнирный момент на руле
воспринимается рулевым приводом и усилие на рычаг управления не
передается, в проводку встраивается механизм загрузки (МЗ). Этот механизм
МЭТ
РА
РП
Рис. 5.5. Электродистанционная система управления рулем высоты
158
создает искусственные усилия на рычаге управления. Снятие постоянных
усилий с рычага управления осуществляется поджатием механизма загрузки электрическим механизмом эффекта триммирования (МЭТ).
Вместо традиционных рычагов управления колонки и баранки штурвала
в ЭДСУ может применяться боковая ручка управления. Тогда пилот
управляет самолетом не по усилию, а по перемещению. Это перемещение
преобразуется датчиком перемещений в электрический сигнал, далее работа
системы аналогична. В отличие от обычной схемы триммирование осуществляется не смещением ручки управления в новое балансировочное
положение с помощью механизма триммерного эффекта, а непосредственным перемещением руля в балансировочное положение.
ЭДСУ позволяет существенно уменьшить массу системы управления.
Применение боковой ручки облегчает компоновку кабины. Основным
недостатком ЭДСУ является ее зависимость от работоспособности бортовых источников электроэнергии.
5.2. РУЛЕВЫЕ ПРИВОДЫ И СЕРВОПРИВОДЫ
Принцип действия рулевых приводов. Для перемещения рулевых поверхностей в бустерных и электродистанционных системах управления рулями'
используются рулевые приводы. Наибольшее распространение получили
рулевые приводы гидромеханического принципа действия. Гидромеханический рулевой привод за счет использования гидравлической энергии
преобразует механическое перемещение входного звена в механическое
перемещение выходного звена.
Рулевой привод представляет собой следящую механическую систему
(рис. 5.6, а). Перемещение хвх входной тяги РП пилотом или автоматикой
в механическом сравнивающем устройстве С суммируется с механическим
сигналом обратной связи х0. с , формируемым звеном обратной связи (ОС)
пропорционально перемещению выходного звена РП х в ы х . Разность перемещений (хвх — х„. с ) подается в регулирующее устройство (РУ) и силовой
механизм (СМ). Так как сигнал обратной связи несет информацию о перемещении выходного звена, такая обратная связь является позиционной
(жесткой). Управляющий сигнал хвх вызывает соответствующее смещение
выходного звена РП относительно нейтрали.
Входным сигналом является перемещение пилотом тяги 1 (рис. 5.6,6).
Это перемещение вызывает смещение штока 2 регулирующего золотникового устройства 3. В результате гидравлическая жидкость под большим
давлением через линию подачи 4 поступает в полости А или В регулирующего устройства. Одновременно из противоположной полости происходит слив жидкости через линию слива 5. Увеличение давления в одной из
полостей регулирующего устройства вызывает увеличение давления в
смежной с ней полости С или О силового механизма 6. В результате
происходит перемещение выходного штока 7, который одним концом
соединен через механическую тягу с рулевой поверхностью, а другим
концом - с механическим сравнивающим устройством 8. Тем самым реали159
зуется жесткая обратная связь по перемещению. Смещение выходного
штока вызывает возвращение штока регулирующего устройства в среднее
положение и прекращение доступа гидравлической жидкости в полости
силового механизма. Движение выходного штока прекращается, а его
положение пропорционально положению входной тяги.
Принцип действия сервоприводов. Для преобразования электрического
управляющего сигнала автоматики в перемещение механической проводки
управления используются сервоприводы электромеханического и электрогидравлического принципов действия. Электромеханический сервопривод
строится на базе рулевой машины. Электромеханический сервопривод
под действием электрической энергии преобразует электрический входной
управляющий сигнал автоматики в перемещение выходного вала рулевой
машины. Электрогидравлический сервопривод строится на базе рулевого
агрегата. Электрогидравлический сервопривод за счет гидравлической энергии преобразует электрический входной управляющий сигнал автоматики
в перемещение выходного звена рулевого агрегата.
Электромеханический сервопривод представляет собой следящую систему (рис. 5.7, а). Входной управляющий сигнал автоматики в виде напряжения ивх в сумматоре С суммируется с сигналами обратной связи
иос1 и и о с 2 . Суммарный сигнал и с , равный разности входного управляющего сигнала и сигналов обратной связи, подается на усилитель
мощности У и двигатель Д рулевой машины РМ. Тахогенератор ТГ
рулевой машины вырабатывает сигнал обратной связи и0. с 1 , пропорциональный скорости вращения выходного вала ф в ы х . Потенциометрический или индукционный датчик обратной связи ДОС вырабатывает
сигнал обратной связи и0 с 2 , пропорциональный углу вращения выходного
вала ф в ы х . В зависимости от вида обратной связи в электромеханическом
сервоприводе различают сервоприводы с позиционной (жесткой) обратной
связью, скоростной (гибкой) обратной связью и изодромной обратной
связью.
Сервопривод с позиционной обратной связью реализуется на базе
рассмотренной функциональной схемы, если в качестве сигнала обратной
связи используется сигнал и„. С 2. несущий информацию об угле вращения,
выходного вала РМ. Тогда управляющий сигнал ивх вызывает соответствующее смещение выходного вала РМ относительно нейтрали. Сигнал
Рис. 5.6. Функциональная (а) и кинематическая (б) схемы рулевого привода
160
а)
ил^1
И
/«г(
икг
С
И.
У
иу
Л
ТГ
^
ДОС
РМ
Рис. 5.7. Функциональная (о) и кинематическая (б) схемы электромеханического сервопривода
обратной связи и0. с 1 , несущий информацию о скорости вращения выходного вала, используется для улучшения динамических характеристик сервопривода.
Сервопривод со скоростной обратной связью формируется на базе
рассмотренной функциональной схемы, если в качестве сигнала обратной
связи используется только сигнал выходного вала РМ. Тогда сигнал
и0 с2 на сумматор сервопривода не поступает.
Сервопривод с изодромной обратной связью реализуется путем пропускания сигнала позиционной обратной связи и„. с2 через электромеханическую следящую систему с последующим суммированием этого сигнала
с сигналом позиционной обратной связи и0. с 2 , заведенным на сумматор
обычным образом. Это позволяет изменить динамические характеристики
сервопривода.
Электрокинематическая схема электромеханического сервопривода
представлена на рис. 5.7,6. Входной управляющий сигнал в виде напряжения переменного тока ивх подается на потенциометр суммирующей
схемы. С выхода сумматора напряжение переменного тока ис подается на
магнитный усилитель мощности У. Управляющее напряжение переменного
тока иу подается на управляющую обмотку асинхронного двухфазного
двигателя Д. Двигатель вращает выходной вал РМ через редуктор Р. Это
вращение передается тросовому барабану ТБ, к которому подсоединена
тросовая тяга, сцепленная с механической проводкой. На одном валу
с двигателем находится тахогенератор ТГ, в сигнальной обмотке которого
наводится сигнал и„. С 1, пропорциональный скорости вращения. Этот сигнал подается на потенциометр сумматора. Индукционный датчик ДОС
преобразует угол поворота выходного вала РМ в электрический сигнал
и0. с2 • Этот сигнал подается на потенциометр сумматора сервопривода.
Сервопривод работает следующим образом. При появлении на входе
сумматора управляющего сигнала ивх РМ начинает его отработку и делает
это до тех пор, пока сигналы обратной связи и0. с1 и и0. с2 на входе
сумматора не скомпенсируют входной сигнал и вх . Это произойдет тогда,
когда угол поворота вала РМ станет пропорциональным входном сигналу.
Электрогидравлический сервопривод представляет собой следящую систему (рис. 5.8, а). Входной управляющий сигнал автоматики в виде напря63ак.948
161
1:
"ИГ
с
с
_^_
У
*-
им
ДОС
РА
^
Рис. 5.8. Функциональная (а) и кинематическая (5) схемы электрогидравлического сервопривода
жения ивх подается на сумматор С, где суммируется с сигналом позиционной обратной связи и„. с. Суммарный сигнал ис усиливается в усилителе
У и подается на исполнительный механизм ИМ рулевого агрегата РА.
Датчик обратной связи ДОС вырабатывает сигнал и0. с , пропорциональный
перемещению выходного штока РА х в ы х . В электрогидравлических сервоприводах реализуется, как правило, жесткая обратная связь.
Электрокинематическая схема электрогидравлического сервопривода
представлена на рис. 5.8,6. Входной управляющий сигнал в виде напряжения постоянного тока ивх подается на суммирующий усилитель постоянного тока УПТ, далее на усилитель У и катушку 1 преобразователя
сигналов рулевого агрегата, который представляет собой двухкаскадный
усилитель.
Первый каскад усиления-гидроусилитель типа «сопло - заслонка», выполненный по схеме гидравлического моста. В качестве постоянных и равных между собой гидравлических сопротивлений применяются дроссели 5.
Переменными гидравлическими сопротивлениями являются сопла 3 с заслонкой 4, жестко связанной с якорем 2 преобразователя сигналов. Входным сигналом первого каскада усиления является электрический ток
в катушке 1упр, выходным-перепад давления на торцах распределительного золотникового устройства 6, включенного в диагональ моста. Золотник-второй каскад усиления. Расход рабочей жидкости, определяемый
открытием щели в гильзе золотниковой пары, является выходным параметром второго каскада.
Принцип действия рулевого агрегата основан на равновесии и дисбалансе моста. При отсутствии тока в обмотках преобразователя сигналов мост
сбалансирован. При подаче тока управления якорь с заслонкой отклоняется
от нейтрального положения. Это приводит к изменению сопротивления
истечению рабочей жидкости из сопел, нарушению равновесия моста
и возникновению перепада давления на торцах распределительного устройства. Под действием перепада давления золотник смещается вправо или
влево от нейтрального положения, соединяя при этом полости цилиндра
162
А или В с линией подачи или линией слива. В результате перемещается
поршень и выходной шток 8 силового механизма 7. Выходной шток
сопрягается с механической проводкой управления. Одновременно с перемещением выходного штока с потенциометра К0. с снимается сигнал жесткой обратной связи по перемещению. При появлении на входе сумматора
управляющего сигнала ивх рулевой агрегат начинает его отработку и делает
это до тех пор, пока сигнал обратной связи и0. „ на входе сумматора не
скомпенсирует входной сигнал. Это произойдет тогда, когда перемещение
выходного штока РА станет пропорционально входному сигналу.
Реакция рулевых приводов и сервоприводов на управляющие воздействия.
Исследование реакции приводов на управляющие воздействия удобно
провести на основе их передаточных функций. Рассмотрим упрощенную
модель рулевого привода в виде следующего дифференциального уравнения:
хвых (4) = Ъфп [хвх (!) - х вых (I)],
(5.1)
где 1срп- коэффициент усиления РП.
Применим к уравнению (5.1) преобразование Лапласа:
рХ8ых (р) = крп [Хвх (р) - Хвых (р) - Хвых (0)].
(5.2)
Отсюда, полагая Хвых (0) = 0, определим передаточную функцию РП как
отношение преобразования Лапласа выходного сигнала Х вых (р) к преобразованию Лапласа входного сигнала Хвх(р) при нулевых начальных условиях:
\у (о) = Х"ых(р) =
^55
Хвх(р) (р + к р п )
** РП\Р>
1 Г / Ч
,
I
\
.
1 '
Трпр+1
т~
(5 3)
\-}--3)
где Трп = 1/крп- постоянная времени РП.
Таким образом, динамика РП может быть описана динамикой апериодического звена. Обычно коэффициент усиления РП выбирают достаточно
большим (Кр„ = 50 -г- 100). Поэтому постоянная времени РП оказывается
достаточно малой (Трп = 0,01 -=- 0,02 с). Тогда в приближенных исследованиях динамикой РП можно пренебречь, полагая Трп ^ 1.
Рассмотрим переходный процесс при скачкообразном изменении входного сигнала на единицу (Хвх(р) = 1). Тогда согласно (5.3)
хвых(1) = (1-е~1/Н
(5.4)
Рассмотрим упрощенную модель рулевого агрегата в виде следующих
дифференциальных уравнений:
х вых а) = крах^р(1),
х^(1) = ^[ивх(0-хпр(1)],
(5.5)
(5.6)
Ара
где х],р - координата, характеризующая подвод гидравлической энергии; к^, Тракоэффициент усиления и постоянная времени РА.
6»
163
Решая уравнения (5.5), (5.6) с помощью преобразования Лапласа:
рХ вых (р) = 1сРа[Х!,р(р) + Хвых(0)],
(5.7)
рХ^р (р) = =?- [и„х (Р) - Х^р (р) - Х|,р (0)]
(5.8)
Ара
и полагая Хвых(0) = Хпр(0) = 0, определим передаточную функцию РА
__. , .
Х„„„(Р)
Кпра
Таким образом, динамика РА может быть описана динамикой усилительного, апериодического и интегрирующего звеньев. Обычно постоянную
времени РА выбирают достаточно малой (Тра = 0,01 н- 0,03 с). Тогда в приближенных исследованиях запаздыванием РА пренебрегают, полагая
^ра (Р) = Ьра/Р-
(5ЛО)
Рассмотрим переходный процесс при скачкообразном изменении входного сигнала на единицу (1Твх(р) = 1). Тогда согласно (5.10)
. хвых«) = кра1.
(5.11)
Рассмотрим упрощенную модель рулевой машины в виде следующих
дифференциальных уравнений:
Ф,ых(0 = 1срмх;;р(1);
(5.12)
хэ„„а) = =*- [ивха) - хэпр(*)],
(5.13)
1рм
где х^р-координата, характеризующая подвод электрической энергии; к р м , Т рм коэффициент усиления и постоянная времени РМ.
Решив уравнения (5.12), (5.13), получим передаточную функцию РМ
ф
ых(р)
шРм (р)
= °
=
^
.
(Р>
Ч„х(р)
р(Т р м р+1)
(5.14)
Таким образом, динамика РМ может быть описана динамикой усилительного, апериодического и интегрирующего звеньев. Обычно не удается
получить достаточно малое запаздывание РМ в силу ограниченности
характеристик электродвигателя. Поэтому постоянная времени РМ составляет Трм = 0,05 -=-0,1 с, ею пренебречь нельзя.
Следует иметь в виду, что используемые линейные дифференциальные
уравнения не учитывают ряд существенных нелинейностей. Так, для рулевого агрегата в точных расчетах необходимо учитывать ограничение
перемещения выходного штока, создаваемое концевыми выключателями,
ограничение ускорения выходного штока, создаваемое ограничением мощности по давлению; ограничение скорости выходного штока, создаваемое
ограничением по расходу жидкости; зону нечувствительности, создаваемую
перекрытием золотника.
164
I
Рис. 5.9. Реакция сервоприводов на ступенчатый
единичный входной сигнал
/-электрогидравлический сервопривод без обратной
связи; 2-электромеханический СП без ОС; 3- электрогидравлический и 4- электромеханический СП с ЖОС;
5-электромеханический СП с СОС; б-электромеханический СП с ЖОС и СОС; /-электромеханический СП
с ИОС
Аналогичные нелинейности характерны и для рулевой машины: ограничение перемещения выходного вала, создаваемое концевыми выключателями; ограничение ускорения выходного вала, создаваемое ограничением
управляющего тока; ограничение скорости перемещения выходного вала,
создаваемое ограничением управляющего напряжения; зона нечувствительности, определяемая напряжением трогания двигателя.
Полученные передаточные функции РА (5.10) и РМ (5.14) позволяют
исследовать динамику сервоприводов. Рассмотрим сначала модель электрогидравлического сервопривода без обратной связи. Пусть передаточная
функция усилителя определяется \Уу(р) = к у , где ку-коэффициент усиления.
Тогда передаточная функция электрогидравлического сервопривода без
обратной связи
^эг (р) = ^у (р) \Ура (р) = ку к р а /р = 1сэг/р.
(5.15)
Ступенчатый единичный входной сигнал такой сервопривод отрабатывает как интегрирующее звено:
хвы*(1) = к э г г.
(5-16)
Переходный процесс показан на рис. 5.9, а (кривая 7).
Передаточная функция электромеханического сервопривода без обратной связи
,
,
-"^ Ком
р(Т р м +1)
-^эм
р(Т р м +1)'
(5.17)
где 1сэм = 1су крм - коэффициент усиления электромеханического СП без обратной
связи.
Ступенчатый единичный входной сигнал такой сервопривод отработает
как интегрирующее звено с запаздыванием (кривая 2).
Рассмотрим модель электрогидравлического сервопривода с жесткой
обратной связью, когда в цепи обратной связи стоит усилительное звено
165
Яия
Рис. 5.10. Структурные 'схемы сервоприводов:
а -электрогидравлического;
гидравлического; б -электромеханического с ЖОС; е- с СОС; г -с ЖОС и СОС; д-с
ИОС
вода
= кжос(рис. 5.10, и). Тогда передаточная функция такого сервопри-
1 + ^у (р) АУ ра (р) \УЖОС (р)
ТГ р + 1
(5.18)
Коэффициент усиления и постоянная времени электрогидравлического
сервопривода с жесткой обратной связью имеют вид:
Т ЖОС
эг
(5.20)
-
— '
Ступенчатый единичный входной сигнал такой сервопривод преобразует как апериодическое звено:
х
вых(1) = ^эг00 (1 — е
(5-21)
' )•
Если коэффициент усиления к у достаточно велик, а к жос = 1, то Т™0 ^ 1.
Тогда ^*ос ^ 1 и динамикой электрогидравлического сервопривода с жесткой обратной связью можно пренебречь (рис. 5.9,6, кривая 3).
Рассмотрим модель электромеханического сервопривода с жесткой
обратной связью (рис. 5.10,6). Его передаточная функция
Т..ЖОС
Л
эм
'" ™
1 + \У У (р)\У рм (р)\У ЖОС (р)
-.
(Т™) р + 2^ Т-' р + 1
2
2
(5.22)
Постоянная времени и коэффициент затухания имеют вид:
•ужос __
/
Рм
V Ку К рм К ж о с
166
(5.23)
рЖОС
/<Г
ЭМ
2
1с
•^ VV ТА р 1с
А-у 1с
Ар Л-
^
М
м
'
жос
^
Ступенчатый единичный входной сигнал такой сервопривод отработает
как колебательное звено:
1
1- .
1
Ч
эм
»ос 1- /ТЖОС
~^ 1 / 1 ™ х
Р
е
-
^
1
эм
-
.
(5-25)
/^
Переходный процесс показан на рис. 5.9, в (кривая 4).
Рассмотрим модель электромеханического сервопривода со скоростной
обратной связью, когда в цепи обратной связи находится дифференцирующее звено с передаточной функцией \Усос(р) = 1ссоср (рис. 5.10, в). Тогда
передаточная функция такого сервопривода
\уУ (Ъ)\У
с
\У°°м (Р) =
"
сос
(г>\
\с
=
—
ос
(5.26)
'
1
Коэффициент усиления и постоянную времени определяют так:
исос _
КуКрм
1
.
1
1
т
ТСОС
эм
/с -ч-,-,
1 + КуК р м к с о с
Ь-ЭМ
1
>
\- -^')
'
Рм
/С -^04
Р
~1+к у к р м к С О ( /
'
Ступенчатый единичный входной сигнал такой сервопривод отработает
так же, как и сервопривод без обратной связи. Инерционность СП уменьшится, так как Тэмс < Тр^, однако вместе с этим уменьшится коэффициент
усиления к.^ < к.эм (кривая 5, рис. 5.9, а).
Рассмотрим модель электромеханического сервопривода, охваченного
скоростной и жесткой обратными связями (рис. 5.10, г). Передаточная
функция такого сервопривода
^ужсос /_\
^жос
Коэффициент усиления, постоянная времени и коэффициент затухания
имеют вид:
ЬЖСОС _
к
Т
ЖСОС
ЭМ
эм
— ,
Л
/ 1
VЧ
1
,
к
к
к
п.у Л-рм "-ЖОС
-1(\\
(О.Э\})
Рм
/
~
(с
у
-уЖОС
—
А
ЭМ
)
/С О 1 \
\^.Л)
167
V V
"" '
* рм *-у "-рм ^жос
Ступенчатый единичный входной сигнал такой сервопривод обработает
почти так же, как и электромеханический сервопривод с жесткой обратной
связью (5.25). Отличие будет заключаться в большем коэффициенте затус
см
ис
хания !^° < ^52* ( - Р - 5.9, в, кривая 6).
Рассмотрим модель электромеханического сервопривода, охваченного
изодромной обратной связью, передаточная функция которой \УИОС (р) =
=
Тяр/(Тир + 1) (рис. 5.10,<)). Такая передаточная функция получается при
пропускании сигнала через КС-цепочку. Другой способ заключается в пропускании сигнала через электромеханическую следящую систему с передаточной функцией апериодического звена \У(р) = 1/(Тяр + 1) с последующим вычитанием из входного сигнала:
Тир
1
ивых - ивх - ——- ивх - ^+ ]} и и .
Передаточная функция сервопривода с изодромной обратной связью
(5.33)
где Т"°с, ^°с- постоянная времени и коэффициент затухания.
Если Т„ » Т рм , то
с
^ /—^- = Т Ж М С ,
(5.34)
(5.35)
•^ V
1 рм *^у ^-рм
Таким образом, в диапазоне частот со < 1/Ти СП с изодромной обратной связью работает как СП со скоростной обратной связью, так как в этом
случае
^ЭТ(Р)^=Д-.
(5-36)
Т„Р
При со > 1/Ти работа СП аналогична работе СП с жесткой обратной
связью, так как
ГуиОС /
N ^ _
"эм 1Р; -
(С
)2 2 , 2?жос Т жос
, 1 •
эм I Р т ^.^эм *эм Р ^ 1
(ТЖОС
1
\
374
^-^ I )
Другими словами, быстрые управляющие воздействия СП с изодромной обратной связью отрабатывает как СП с жесткой обратной связью,
а медленные управляющие воздействия -как СП со скоростной обратной
связью (рис. 5.9, г, кривая 7).
168
5.3. КИНЕМАТИКА РУЧНОГО И АВТОМАТИЗИРОВАННОГО
УПРАВЛЕНИЯ
Кинематика включения в механическую проводку управления рулевых
приводов, агрегатов и машин. Существуют два основных способа включения
исполнительных устройств автоматики в проводку системы управления:
последовательный и параллельный. При последовательном способе включения отклонения рулевой поверхности по командам ручного и автоматического управления суммируются и обеспечивается возможность автоматизированного управления самолетом. При параллельном способе управление
рулевой поверхностью осуществляется либо пилотом от рычага управления,
либо автоматикой. Возможность их совместного управления исключается.
Последовательный способ включения реализуется двумя распространенными схемами: через раздвижную тягу и через дифференциальную
качалку. В кинематической схеме последовательного включения исполнительного устройства автоматики в проводку управления через раздвижную
тягу (рис. 5.11, а) исполнительным устройством автоматики служит элект\КШ
РВ
Рис. 5.11. Кинематическая схема последовательного включения исполнительного
устройства автоматики в проводку управления через раздвижную тяГу:
а-при отсутствии управления; б-при ручном управлении; в-при автоматическом управлении
169
рогидравлический комбинированный агрегат управления КАУ, имеющий
раздвижную тягу, жестко включенную в проводку управления. В режиме
ручного управления длина раздвижной тяги неизменна и воздействие
пилота на рулевую поверхность путем отклонения рычага управления
ничем не отличается от воздействия в обычной бустерной системе без
автоматики. Выдвижение штока рулевого привода /рп прямо пропорционально отклонению колонки штурвала Ахв. В свою очередь отклонение
руля высоты А5§у пропорционально выдвижению штока 1рп (рис. 5.11,6).
В режиме автоматического управления меняется длина раздвижной тяги
КАУ на величину А/ р т , пропорциональную управляющему сигналу автоматики ив (рис. 5.11, в). При этом конец раздвижной тяги, соединенный
с проводкой управления и рычагом управления, остается неподвижным,
следовательно, неподвижным остается рычаг управления. Изменение длины раздвижной тяги влияет на кинематику проводки управления рулевого
привода. Выдвижение штока рулевого привода /рп пропорционально сигналу автоматики ив и приводит к отклонению руля высоты на угол А8|.
РВ
Рис. 5.12. Кинематическая схема последовательного включения исполнительного
устройства автоматики в проводку управления через дифференциальную качалку:
а-при отсутствии управления; б-при ручном управлении; в-при автоматическом управлении
170
Таким образом обеспечивается независимость ручного и автоматического
управления и возможность совместной работы пилота и автоматики.
Рычаги управления при работе автоматики остаются неподвижными, а
информация о наличии усилий в проводке управления в результате работы
КАУ выдается пилоту на индикатор.
В кинематической схеме последовательного включения исполнительного устройства автоматики в проводку управления через дифференциальную качалку (рис. 5.12, а) исполнительным устройством автоматики служит
электрогидравлический рулевой агрегат РА, сопряженный своим штоком
силового механизма с дифференциальной качалкой ЦК. В режиме ручного
управления (рис. 5.12,6) отклонение пилотом колонки штурвала КШ на
величину Ах в вызывает смещение дифференциальной качалки и выдвижение штока силового механизма рулевого привода РП на величину / рп ,
что в свою очередь приводит к отклонению руля высоты на угол АЗ''5'.
Шток силового механизма рулевого агрегата РА при этом остается неподвижным.
В режиме автоматического управления (рис. 5.12, в) при поступлении
электрическог<х управляющего сигнала автоматики ив шток силового механизма рулевого агрегата РА смещается на величину А/ р а , увлекая за собой
дифференциальную качалку. Через механическую проводку выдвигается
шток силового механизма рулевого привода РП на величину / рп , что в свою
очередь приводит к отклонению руля высоты на угол А5|. Кинематика
проводки рычага управления при этом остается неизменной, и колонка
штурвала неподвижна. Информация о наличии усилий в проводке выдается
на индикатор. Таким образом обеспечивается независимость ручного
и автоматического управления и возможность совместной работы пилота
и автоматики.
В кинематической схеме параллельного включения исполнительного
устройства автоматики в проводку управления (рис. 5.13, а) исполнительным устройством автоматики служит электромеханическая рулевая машина РМ, сопряженная с проводкой через тросовую передачу и качающийся
сектор. В режиме ручного управления отклонение пилотом колонки штурвала на величину Ахв вызывает смещение штока силового механизма
рулевого привода РП на величину /рп (рис. 5.13,6). Это приводит к отклонению руля высоты РВ на угол А5?у. Смещение механической проводки
через качающийся сектор и тросовую передачу вызывает поворот вала
рулевой машины РМ в положение, согласованное с положением рычага
управления.
В режиме автоматического управления при поступлении электрического
управляющего сигнала автоматики ив вал рулевой машины поворачивается
на угол Аф, увлекая за собой через тросовую передачу качающийся сектор
и всю механическую проводку управления. При этом происходит смещение
штока силового механизма РП и отклонение руля высоты на угол А5|. Это
движение передается на рычаг управления, который занимает положение,
согласованное с положением вала рулевой машины. Таким образом,
данная схема предусматривает возможность раздельного управления самолетом либо пилотом, либо автоматикой. Совместная работа исключается.
171
Кинематика сопряжения ручного и автоматического управления. Режимы
ручного и автоматического управления в полете, как правило, чередуются.
Смена режимов должна происходить плавно, без рывков рулевых поверхностей и изменения положения самолета относительно центра масс. Для
обеспечения этого требования должны быть предусмотрены соответствующие схемы сопряжения ручного и автоматического управления. Задача
решается с помощью специальных электрических схем согласования автоматики (см. § 9.1) и с помощью дополнительных исполнительных устройств, воздействующих на кинематику механической проводки управления. Рассмотрим работу схем сопряжения ручного и автоматического
управления с помощью дополнительных исполнительных устройств автоматики.
Ручное и автоматическое управление сводится к созданию управляющего воздействия на входе рулевого привода. Как правило, это воздействие
включает две составляющие: быструю и медленную. Быстрое воздействие
осуществляется пилотом или автоматикой при парировании внешних воз-
а)
РП
Рис. 5.13. Кинематическая схема параллельного включения исполнительного устройства автоматики в проводку управления:
а-при отсутствии управления; б-при ручном или автоматическом управлении
172
а)
РВ
нэ
Рис. 5.14. Кинематические схемы сопряжения ручного и автоматического управления:
«-при последовательном включении; б-при параллельном включении
мущений или создании управлений для целенаправленного изменения
траектории. Медленное воздействие обусловлено необходимостью балансировки самолета или триммирования усилий на рычагах управления.
Пилот осуществляет переход с ручного режима управления на автоматический в установившемся полете, предварительно стриммировав усилия на
рычагах управления таким образом, чтобы балансировочному положению
рулей соответствовало нейтральное положение механизма загрузки, что
обеспечивает отсутствие усилий на рычагах управления. Поэтому при
переходе от ручного к автоматическому управлению необходимо установить нейтральное положение выходных штоков и валов исполнительных
устройств автоматики в момент их электрического подключения. В то же
время при переходе с автоматического управления на ручное необходимо,
чтобы положение рычагов управления полностью соответствовало отклонению рулей. При последовательном и параллельном включении исполнительных устройств автоматики в проводку управления рулями эти задачи
решаются по-разному.
173
При последовательном включении распространена схема «перекачки»
медленной составляющей управляющего сигнала автоматики в тракт
ручного управления (рис. 5.14, а). Дополнительное исполнительное устройство автоматики-механизм эффекта триммирования воздействует на механизм загрузки, отклоняя рычаг управления при поступлении электрических
сигналов. В ручном режиме электрический сигнал формирует пилот путем
нажатия тангенты управления МЭТ на штурвале.
В автоматическом режиме электрический сигнал формируется автоматикой, которая выделяет медленную составляющую управляющего сигнала
для воздействия на руль через МЭТ. В результате балансировочное
положение руля обеспечивается через тракт ручного управления, а быстрые
управляющие воздействия автоматики формируются основным исполнительным устройством-рулевым агрегатом относительно нейтрального
положения его штока. Положение рычага управления при этом соответствует балансировочному положению руля и переход с автоматического
режима управления на ручной происходит плавно. Обратный переход
с ручного управления на автоматическое в данной схеме не требует никакой
предварительной подготовки, так как в ручном режиме выходной шток РА
остается неподвижным относительно нейтрального положения и это положение не зависит от положения рычагов управления и рулей.
При параллельном включении ручное и автоматическое воздействия
передаются на рули по одному и тому же тракту. Рассмотрим схему
сопряжения с «плавающей» обратной связью (рис. 5.14,6). Эта связь
вводится по перемещению механизма загрузки, измеряемого датчиком
положения ДП, таким образом, чтобы нулевому сигналу на входе рулевой
машины соответствовало нейтральное состояние пружины. Это обспечивает безударное включение автоматического управления, если к моменту
включения пилот стриммировал в ручном режиме усилие на рычаге
управления. Если в процессе автоматического управления балансировочное
положение самолета меняется, то работает схема «перекачки», рассмотренная выше. Это приводит к медленной деформации пружины, снятию усилий
и изменению сигнала «плавающей» обратной связи. Так как положение
руля не должно изменяться, то управляющий сигнал на рулевой машине
приводится в соответствие с изменившимся сигналом обратной связи,
а автоматика воспринимает дрейф сигнала обратной связи как возмущение
и парирует его. В результате «средняя» составляющая управляющего
сигнала автоматики стремится к нулю, и в момент отключения автоматики
пружина поставит руль в балансировочное положение. Это обспечивает
мягкое сопряжение ручного и автоматического режимов управления.
Контрольные вопросы
1. Каким образом обеспечивается «чувство управления» в бустерных и электродистанционных системах управления рулями?
2. Поясните работу рулевого привода и электромеханического сервопривода.
3. Какова динамика работы сервопривода с разным типом обратных связей?
4. Как обеспечивается мягкое переключение ручных и автоматических режимов
управления самолетом?
174
Глава 6
ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ
Если у самолета неудовлеторительные характеристики демпфирования
и устойчивости, необходимо улучшить эти характеристики с помощью
соответствующих автоматических средств. Автоматическое демпфирование
колебаний самолета осуществляется путем отклонения рулей средствами
автоматического управления при изменении параметров короткопериодического движения самолета. Благоприятное влияние автоматики на
характеристики демпфирования и устойчивости проявляется в улучшении
качества переходных процессов возвращения самолета к исходному режиму
по перегрузкам и угловым скоростям после непроизвольного отклонения
под действием внешних возмущений, а также переходных процессов выхода
самолета на новый режим полета после целенаправленного воздействия
пилота на рычаги управления.
В качестве средств автоматического демпфирования самолета применяют автоматы демпфирования, среди которых различают демпферы
тангажа, крена и рыскания. Их общая особенность - автоматическое отклонение руля при возникновении угловой скорости вращения самолета
относительно соответствующей связанной оси.
Разделение средств автоматического демпфирования и улучшения
устойчивости самолета на автоматы демпфирования и устойчивости достаточно условно, так как демпфирование и устойчивость являются взаимосвязанными свойствами самолета. Кроме того, на современных самолетах
автоматы демпфирования и устойчивости комплексируются в единой
системе и работают одновременно и согласованно. Однако с методической
точки зрения изучение средств автоматического демпфирования и улучшения устойчивости самолета целесообразно начать с изучения простейших
автоматов демпфирования и устойчивости.
6.1. АВТОМАТИЧЕСКОЕ ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ ПО ТАНГАЖУ
6.1.1. Демпферы тангажа
Устройство и работа. Необходимость демпфирования продольных короткопериодических колебаний самолета возникает при недостаточной
степени его продольной статической устойчивости по перегрузке и сильно
выраженной колебательности переходных процессов при возвращении самолета к исходному режиму по нормальной перегрузке после непроизвольного отклонения под действием внешнего момента тангажа или вертикального ветра. Чтобы решить эту задачу, пилот, наблюдая за изменением угла
тангажа по прибору, воздействует на колонку штурвала и отклоняет руль
высоты таким образом, чтобы колебания самолета по тангажу прекратились. Для освобождения пилота от ручного демпфирования продольных
короткопериодических колебаний самолета служат демпферы тангажа.
175
Демпфер тангажа (ДТ)-средство автоматического управления, обеспечивающее демпфирование продольных короткопериодических колебаний
самолета на всех этапах полета путем отклонения руля высоты при
возникновении угловой скорости тангажа.
Простейший демпфер тангажа реализует следующий закон управления
рулем высоты:
Л§в
= к
«гй)2>
(6.1)-
где Д5В -автоматическое отклонение руля высоты от балансировочного положения
демпфером тангажа; 1сШг- передаточный коэффициент по угловой скорости тангажа,
показывающий, на какой угол должен отклониться руль высоты при изменении
угловой скорости на Г/с (1 рад/с).
Демпферы тангажа устанавливают на самолеты с бустерной или электродистанционной системой управления рулем высоты. Это позволяет
обеспечить последовательную схему включения исполнительного устройства демпфера в механическую проводку руля высоты. При совместном
управлении самолетом пилотом и демпфером тангажа общее отклонение
руля высоты от балансировочного положения А5В равно алгебраической
сумме ручного отклонения пилотом от колонки штурвала А5^ и автоматического отклонения демпфером тангажа:
Д8„ =
(6.2)
В состав аналогового демпфера тангажа (рис. 6.1) входят датчик угловой скорости тангажа ДУС, вычислитель В и сервопривод руля высоты
СУ75В. Сервопривод включает сумматор С, усилитель У, исполнительный
механизм ИМ и датчик обратной связи ДОС. Сервопривод охватывается
жесткой обратной связью. В качестве исполнительного механизма служит
гидропривод, который вместе с датчиком ДОС образует рулевой агрегат
СП 8, "1
лиг
\
г/
\ ь
"6)2
^
ЛУ-
б
Г 1г*-
1 .
БД
\
(канал РВ)
и'ос
-*У
'
р/ $в
мм
ИМ
Ди(,
~|Г
-
РИС. 6.1. Функциональная схема аналогового демпфера тангажа
176
РА. Датчик ДУС помещается в блок демпфирующих гироскопов (БДГ).
Вычислительное устройство вместе с электронной частью сервопривода,
сумматором и усилителем образуют электронный блок демпфера БД
в канале руля высоты.
Демпфер тангажа работает следующим образом. При возникновении
угловой скорости тангажа датчик ДУС вырабатывает сигнал и^ , пропорциональный этой скорости. Сигнал подается в вычислитель, который
в соответствии с законом управления (6.1) вырабатывает управляющий
сигнал ив на вход сумматора сервопривода. Сервопривод преобразует этот
сигнал в перемещение штока рулевого агрегата А6 В . Одновременно
с датчика обратной связи снимается электрический сигнал обратной связи
иос , пропорциональный перемещению штока рулевого агрегата. Как только
сигналы иос и ив уравновесят друг друга на входе сумматора сервопривода,
отработка руля высоты рулевым агрегатом прекращается и руль остановится в некотором положении, пропорциональном возникшей угловой
скорости со г .
Отклонение руля высоты вызовет появление управляющего аэродинамического момента М^., противоположного по знаку возмущению, приведшему к появлению угловой скорости со2 . Поэтому угловая скорость юг
начнет уменьшаться, а вместе с не,й и сигнал иШг с датчика ДУС. Когда
угловая скорость <вг станет равной нулю и ив = 0, то под действием сигнала
обратной связи иос сервопривод возвратит руль высоты обратно в балансировочное положение. Таким образом колебательность продольного движения будет погашена.
Отклонение руля высоты А6Ц создается пилотом путем перемещения
колонки штурвала КШ на величину Ах в от балансировочного положения.
Посредством дифференциальной качалки осуществляется взаимодействие
демпфера тангажа с системой управления рулем высоты (СУП РВ) согласно
(6.2). Через рулевой привод формируется отклонение руля А6В .
Влияние демпферов тангажа на характеристики продольной устойчивости
и управляемости. Покажем, что с помощью демпфера тангажа повышается
степень продольной устойчивости по перегрузке. При отклонении руля
высоты демпфером появляется приращение коэффициента момента тангажа
Ат2 = т 2 'А5 в = т/ к^ <вг = Ат^ юг ,
(6.3)
где Ат 2 " = т/К^У/Ъ,,; <вг определяется выражением (3.31).
Тогда степень продольной статической устойчивости по перегрузке
моле
самолета,
управляемого демпфером тангажа ст„ , определяется согласно
(3.30):
Т
°п = | -т— I
'
(Ц.
_1 V = СОПЗ,
= ш? + — +
г— = °п + А<'.
(6.4)
Ц
177
Рис. 6.2. Переходные процессы в контуре
угловой скорости тангажа при кратковременном внешнем возмущении:
Рис. 6.3. Переходные процессы в контура
угловой скорости тангажа при отклонена
пилотом руля высоты:
а-свободный самолет;
демпфере тангажа
а-свободный самолет;
демпфере тангажа
б-при
включенном
б-при
включенна
Так как тг' < 0, то приращение степени продольной статической устойчивости по перегрузке за счет использования демпфера тангажа Дсг„ < 0.
Следовательно,
1<т? Т |>|а п |,
(6.5)
что доказывает повышение статической устойчивости продольного движения.
Покажем, что с помощью демпфера тангажа улучшается динамическая
устойчивость продольного движения. Переходный процесс, возникший
в результате кратковременного внешнего возмущения (рис. 6.2, а), характеризуется периодом собственных продольных короткопериодических колебаний Т, и временем затухания (1^„). На рис. 6.2, б показан переходный
процесс при наличии на самолете демпфера тангажа. Как видно из графика,
характеристики динамической устойчивости самолета с демпфером тангажа Тк и (1;ат )дт лучше, чем у самолета без демпфера. Демпфер тангажа
позволяет снизить колебательность продольного короткопериодического
движения самолета и уменьшить длительность переходных процессов.
На рис. 6.3 показан переходный процесс, возникающий в результате
ступенчатого отклонения пилотом руля высоты на угол А8§. Как видно из
графиков, демпфер тангажа делает переходные процессы по угловой скорости тангажа шг и углу тангажа А9 почти плавными. Однако так как
178
отклонение руля высоты демпфером А5д вычитается из отклонения руля
высоты пилотом А8Ц, общее отклонение руля высоты становится меньше.
Следовательно, эффективность управления рулем высоты с помощью
колонки штурвала уменьшается, что приводит к уменьшению установившегося значения (со^ )уст по сравнению с управлением без демпфера
тангажа. Соответственно менее интенсивно растет угол тангажа АЭ. Это
является основным недостатком демпфера тангажа с законом управления
(6.1).
Для создания угловой скорости (со2)уст пилот прикладывает большие
усилия и дает большие перемещения колонки штурвала, компенсируя
увеличение демпфером тангажа градиентов усилий (Р°')дт и перемещений
Пример 6.1. Рассчитаем характеристики устойчивости и управляемости самолета
с демпфером тангажа для примеров 3.1 и 3.2.
В начале полета:
(Дт™° )ДТ = т*' кШ1 У/Ьа = - 1 6,3,
где 1у = 1 ,
°?Т = ^п + (ЛтЬд-г/Ц = -0,488,
(# ) ДТ = - 277 мм,
6* = -31°,
(Р*- )дт = 372 Н.
В конце полета:
(Ат"!)дт = -32,4,
а^Т = -0,414,
(хЦ')дт = - 100 мм,
(Рв')дт = 160 Н.
Таким образом, демпфер тангажа повысил степень продольной статической
устойчивости в начале полета с —0,408 до —0,488 и в конце полета с —0,344 до
—0,414. Однако при этом увеличился градиент перемещения в начале полета с —231
до —277 мм и с —81 мм в конце полета до —100мм и аналогично увеличился
градиент усилия с 318 до 372 Н в начале полета и со 137 до 160 Н в конце полета.
Особенности законов управления. Разновидностью законов управления
демпферов тангажа является закон управления
А5 ^Т = кйг <вг = Ксьг рсог .
(6.6)
Закон управления (6.6) использует в качестве управляющего параметра
производную угловой скорости тангажа <вг = рю2 (р- оператор дифференцирования Лапласа), т. е. угловое ускорение. Так как физические датчики
угловых ускорений не получили распространения, этот сигнал получают
дифференцированием внутри ДУС сигнала сог . Тогда передаточный коэффициент по угловому ускорению тангажа Кщг показывает, на какой угол
должен отклониться руль высоты при изменении углового ускорения
тангажа на Г/с2 (1 рад/с2).
Разновидность закона управления (6.6) имеет вид
Тй Р
лт
'
т
А6? = к й г - - -о.,.
Тщ г р + 1
(6.7)
179
Г"
Киг Ть12р
ДУС
Т,:, 0 + 1
•"чгёЪ
V 1*
«РА
Ку
Р
1
"мое
>д
л
1
с"п&в
.СЛГ
йОв
С
*эГ
(Р) -7
Рис. 6.4. Структурная схема демпфера тангажа
Изодромный фильтр Т^рДТ^р + 1) реализуется в вычислителе блока
демпфера. В аналоговых демпферах это осуществляется с помощью КС-цепочки. Структурная схема демпфера тангажа с законом управления (6.7)
представлена на рис. 6.4.
Законы управления демпферов та-нгажа (6.6) и (6.7) позволяют при
достижении самолетом установившегося значения угловой скорости
возвращать шток рулевого агрегата в нейтральное положение,
когда (юг)^.тр = 0. Противодействие демпфера пилоту прекращается и расход перемещения колонки штурвала для создания угловой скорости не
изменяется.
Влияние отказов и характеристик элементов демпфера тангажа на управление Продольным движением. Отказы в средствах автоматического управления полетом принято классифицировать на пассивные и активные.
Пассивные отказы не приводят к перекладкам рулей и их воздействие
аналогично выключению автоматического средства из процесса управления
полетом, активные отказы приводят к перекладкам рулей и непосредственным образом влияют на динамику управления полетом. Пассивный
отказ демпфера тангажа, сопровождающийся возвращением штока рулевого агрегата в нейтральное положение, приводит к тому, что эффективность демпфирования продольных короткопериодических колебаний резко
падает, а эффективность управления самолетом от колонки штурвала
возрастает. Пилот, пытаясь воздействием на колонку штурвала демпфировать колебания, может непроизвольно ввести самолет в «раскачку».
Активный отказ демпфера тангажа, сопровождающийся отработкой
штока рулевого агрегата на максимальный ход, приводит к выводу
самолета на недопустимые нормальные перегрузки. Если такой отказ
происходит в условиях вертикального маневра, он может привести к перекладке штока рулевого агрегата из одного крайнего положения в другое
и удвоению изменения перегрузки. Одним из активных отказов является
обрыв цепи обратной связи в сервоприводе. Так как коэффициент усиления
сервопривода с жесткой обратной связью обратно пропорционален коэффициенту обратной связи к^с = 1/к.ос, при обрыве обратной связи коэффициент усиления сервопривода возрастает до значения, равного произведению коэффициентов усиления усилителя и рулевого агрегата кс = к ра к у .
180
В результате контур автоматического управления может потерять устойчивость.
Из соображений безопасности автоматического управления полетом
отклонение руля высоты демпфером тангажа обычно ограничивается определенными пределами за счет ограничения хода штока рулевого агрегата.
Это приводит к тому, что при достаточно больших возмущениях эффективность демпфера тангажа в демпфировании колебаний снижается. Наиболее
заметно ограничение хода штока рулевого агрегата сказывается при вертикальном маневре, так как за счет постоянной составляющей угловой
скорости отклоняется руль высоты демпфером. Нелинейность статических
характеристик демпфера тангажа может существенно влиять на управление
продольным движением. Так, ограничение по скорости перемещения штока
рулевого агрегата может сделать неэффективным увеличение передаточного коэффициента демпфера, так как сервопривод будет быстро выходить на
режим насыщения по скорости. Нелинейности характеристик ограничивают
возможность расширения полосы пропускания сервопривода, зависящей от
коэффициента обратной связи. При большом коэффициенте усиления в контуре сервопривода могут возникать автоколебания низкой частоты.
Широкополосная помеха в сигнале угловой скорости тангажа с датчика
ДУС может быть обусловлена вибрацией и изгибными колебаниями
конструкции самолета. При расширении полосы пропускания сервопривода
такая помеха способна вызывать так называемый «автопилотный флаттер» рулевых поверхностей.
В аналоговых средствах автоматического управления одним из основных факторов, влияющих на эффективность их эксплуатации, является
«дрейф нулей» датчиков и разрегулировки передаточных коэффициентов.
6.1.2. Моделирование демпфирования колебаний
по тангажу
Реакция самолета на управляющие воздействия пилота при включенном
демпфере тангажа. Рассмотрим модель продольного короткопериодического движения самолета (3.19), управляемого пилотйм и демпфером тангажа
с законом управления (6.1). Модель содержит уравнение состояния, уравнения выхода и входа, а также законы управления демпфера тангажа
и системы управления полетом:
' *„.(1) = АШ[х11Ж(1) + ВХжи^(1),
(6.8)
Упк(1) = хпк(1),
(6.9)
Д8?т(1),
(6.10)
КкДхв(1),
™УпЛ1).
(6.11)
.
(6-12)
181
Составляющими модели являются:
®г > о
у
В —
"пк
—
Аа(1)
0
а9,ш,
хДТ
0
О
0].
аш.,5,
О
О
(6.13)
Подставим уравнения выхода (6.9) и входа (6.10), а также законы
управления (6.1) и (6.12) в уравнение состояния (6.8) и выполним преобразование Лапласа при нулевых начальных условиях:
>5кАХв(р).
- Апк -
(6.14)
Получаем вектор передаточных функций замкнутой системы «самолет демпфер тангажа» в продольном короткопериодическом движении по
угловой скорости тангажа, углам атаки и тангажа на отклонение пилотом
колонки штурвала при включенном демпфере тангажа:
ДТ
\УПК
Ы
^5
= \Яп
А — 'пк
Ву -'пк
П Д Т/}~ 1*пк*-'пк
В У Ор =^
Ф
IV/=——д -«г
/1
\ —
г —пк
тт
л
ж
1
ж
Переходная матрица состояния продольного короткопериодического
движения самолета при включенном демпфере тангажа
.ДТ
(6-16)
(Р) = (1Р -
Элементами вектора XV „ (р) являются передаточные функции самолета
на управляющее воздействие пилота ДХв(р). Соответствующие параметры
вектора выхода УП11(р) совпадают в рассматриваемом случае с вектором
переменных состояния продольного короткопериодического движения
С(Р)]Т = [ТС» \\С(Р) ТС(р)].
(6.17)
Переходная матрица состояния
'
Т
^ДТ^ .. {Фпк (р)}пр
(6.18)
Т
|ФПК (Р)1
Присоединенная матрица имеет вид
О
О
(6.19)
аа,а)
182
(р-а а ,„)(р-
Определитель матрицы
Р(Р - ао)г,о)г —
аШ!1а
|<С(Р)1 =
а
Р ~ а,а
О
0
р
= Адт(р).
(6.20)
Коэффициент демпфирования и частота продольных короткопериодических колебаний самолета, управляемого демпфером тангажа, имеют вид:
аа,а
, (6.21)
(6.22)
Тогда переходная матрица состояния
Р
Д
/
ч
т Р
/ (р)
(Р)
аа,Ш1
лт
Адт(р)
АДТ(р)
(р(6.23)
АДТ(р)
[(р - аа,„)
(Р - аа,а
АДТ(р)
(Р - аи , -
Вектор передаточных функций замкнутой системы «самолет-демпфер
тангажа»
АДТ(Р)
(6.24)
АДТ(Р)
\
'
Ь(
*^ш.в ^-(ог,бв ^и, о>г \Р
\
^а,а^
АДТ(Р)
183
Введем следующие обозначения:
1
*к,
Т,а
(6.25)
•у * * - *^<о7 ^сог
С
ДТ
1
а
а)г,<ог + а,а + ^иг,8,К<ог) х/^ш,,0,^0,0
а
а
Ясцо^а^.а + а,а юг,8,^юг —
(6-26)
2
1
У н-Ч* "
^
1
2
(СО^)
дт
«Чл8а^а^-а^а.,.
а
гл
—
:
ю,А а '
(т?т)2
+
а ю
^со2 , сог 3-а, а
И Т^ VК(й Vо> \) ?
к
Ш а ^1
О
О
с- 1т
Л
а,а а ю 2 ,6 в ^ш г
г
т
((0
ИХ
)
->
Мо"
&а, а>г Э.<ог , а ~т~ ^-а, а ^о>2 , 5В ^озг
*х
Ру ж М^
^/д Д ' ч 2
1
,
,8.
+ Кш^Шз
,8.
,
,8,
^ ~т Кщ^
Кщ^
(6.29)
Тогда передаточные функции самолета в короткопериодическом движе-1
нии при наличии демпфера тангажа принимают следующий вид:
ДТ
Дх. , V
5
^ш.в1Са,'. (Т 9 Р+ 1)
(6.30)
(6.31)
На рис. 6.5 представлена структурная схема замкнутой системы «самолет-демпфер тангажа». Преобразуя схему, получим передаточную функцию
(6.30). Таким образом, демпфер тангажа не влияет на структуру передаточных функций, а лишь изменяются характеристики образующих их звеньев.
184
Рис. 6.5. Структурная схема замкнутой системы «самолет-демпфер
тангажа»
а*в\
Кй°г(Гер + 1)
' * 1 пщ.в
лт>
й8
ш?
г
Т?р +2Та!;ар+1
^
Необходимыми и достаточными условиями устойчивости автоматизированного контура управления продольным короткопериодическим движением самолета являются условия положительности коэффициента демпфирования и квадрата частоты колебаний:
1
—•
2
'
"
"
(6.33)
Правильным выбором передаточного коэффициента к^ добиваются
выполнения условий (6.33), а также обеспечивают требуемые запасы устойчивости.
Анализ выражений (6.25)-(6.29) показывает, что демпфер тангажа
положительно влияет на характеристики колебательного звена передаточных функций. Постоянная времени Тдт уменьшается, частота собственных колебаний юдт и относительный коэффициент затухания !;ДТ увеличиваются, однако при этом уменьшается коэффициент усиления (1сю') .
Одним из возможных путей сохранения эффективности продольного
управления является использование в законе управления демпфера тангажа
сигнала углового ускорения (6.6). Исследуем передаточную функцию замкнутой системы «самолет - демпфер тангажа» с управлением по угловому
ускорению. В структурной схеме в цепи обратной связи вместо коэффициента ктг появится кШгр. Структура передаточной функции (6.30) не
изменится, а характеристики передаточной функции примут следующие
значения:
6
кчо• = к(0' '
(6.34)
Д Т _ - /„2
, , ДТ
а — V 1 а + К«>, Кшг 18 >
(6.35)
Л
г
2
Т
1
„ДТ _
Ьа
~
—
1
(6.36)
(6.37)
185
Анализ выражений (6.34)-(6.37) показывает, что демпфер тангажа
с управлением по угловому ускорению сохраняет неизменным коэффициент
дт
усиления Кщ" , увеличивает относительный коэффициент затухания ^ , но
уменьшает частоту собственных колебаний ш„ и увеличивает постоянную
времени Т^т. Аналогично влияние на характеристику передаточной функции демпфера тангажа с изодромным звеном в цепи сигнала угловой
скорости (6.7).
Реакция самолета на ступенчатое отклонение органов управления в продольном короткопериодическом движении была рассмотрена в разделе
3,3.2. Посмотрим, как изменится эта реакция, если в проводку управления
самолета включен демпфер тангажа. Маневр самолета в продольной,
плоскости совершается энергичным отклонением колонки штурвала на
величину Дхв, при этом закон изменения Д§ = к ш . в Дх в близок к ступенчатому, т. е. Ах в (1) = 1 (I) Дхв и Ах в (р) = Ах в .
Рассмотрим реакцию самолета с демпфером тангажа на ступенчатое
отклонение пилотом колонки штурвала. На этапе короткопериодического
движения сформируются новые значения угловой скорости тангажа, угла
атаки и нормальной перегрузки:
(Дсо2)уст = Нт {рДхв(р)^(р)} =
р-О
Р
Дхв
1с ш . в к^(Т е р+1)
1_Дх]с
,5ДТ
• /ЛЛ В К Ш . В К Ш
,
Ахвкш.в1са,
Р-О
Г638
,
^О.-)О^
(6.39)
ДТ уо
(ДпУа)уст = Нт {рДхв(р)\\Су(р) \^'(р)} = Ах„1сш.вС->а — . (6.40)
Р-»О
'
В
ДТ
ДТ
5
5
6
5
' " • Так как согласно (6.28) и (6.29) 1с
ш' < к^ и кт" „ < к^ , то установившееся
значение угловой скорости тангажа, угла атаки и нормальной перегрузки
для самолета, управляемого пилотом совместно с демпфером тангажа,
уменьшается.
. Реакция самолета на ступенчатое отклонение колонки штурвала описывается переходными функциями:
6ДТ
Ч (ТеР+
1с У°Р
Кш
дп (р) =
186
.дт
а
-'
У
Г
Ь- 'Кю Лх
аАХ
У-" -
-
° - .
(6.42)
Перейдем от изображения Ап у (р) к оригиналу:
а
У°РУ.*
ДТ
&['-•
лв.
(6.43)
Выражение (6.43) определяет переходный процесс в продольном короткопериодическом колебательном движении самолета с демпфером тангажа при
отклонении колонки штурвала пилотом. Динамические характеристики продольной устойчивости и управляемости определяются следующим образом:
ДТ
Т
-I а
(6.44)
чДТ
ДТ
(Айу.)ДТ = -
11
Ап:ДТ
у, •
Таким образом, включение демпфера тангажа в проводку управления
рулем высоты приводит к уменьшению колебательности процесса управления, однако снижает эффективность продольного управления.
Реакция самолета на внешние возмущения при включенном демпфере
тангажа. Рассмотрим модель продольного короткопериодического вынужденного движения самолета, управляемого демпфером тангажа, при наличии внешних возмущений:
(6.46)
Уп. (*) = *».
(6.47)
(6.48)
Параметры модели определяются следующим образом:
0
.
(6.49)
0
187
Получим матрицу передаточных функций замкнутой системы «самолет-демпфер тангажа» по параметрам продольного короткопериодического движения на внешние возмущения
г
(6
50)
^ч.->и^
где переходная матрица определена выражением (6.23).
6.2. АВТОМАТИЧЕСКОЕ ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ
ПО КРЕНУ
6.2.1. Демпферы крена
Устройство и работа. Необходимость демпфирования колебаний по
крену возникает при непроизвольном отклонении самолета от исходного
режима под действием внешних возмущений или при маневре в горизонтальной плоскости. Если самолет обладает недостаточной степенью поперечной статической устойчивости по скорости крена, а также проявляется
колебательность движения самолета по крену, необходимо обеспечить
принудительное демпфирование. В режиме ручного (штурвального) управления пилот наблюдает за изменением угла крена по указателю авиагоризонта и воздействует на штурвал при возникновении колебаний таким
образом, чтобы отклонение элеронов противодействовало этим колебаниям. Для освобождения пилота от решения этой задачи служат демпферы
крена.
Демпфер крена (ДК) - средство автоматического управления, обеспечивающее демпфирование колебаний самолета по крену на всех этапах полета
путем отклонения элеронов при возникновении угловой скорости крена.
Простейший демпфер крена реализует следующий закон управления
элеронами:
Л5?"-кШхох;
(6.51);
где Д5"- автоматическое отклонение элеронов демпфером крена от балансировочного положения; кщ -передаточный коэффициент по угловой скорости крена, показывающий, на каксШ угол должны отклониться элероны при изменении угловой
скорости крена на Г/с (1 рад/с).
Другими словами, отклонение элеронов демпфером крена пропорционально угловой скорости крена.
Демпферы крена используют на самолетах с бустерной или электродистанционной системой управления элеронами. Их рулевые агрегаты включают в проводку управления по последовательной схеме, тогда общее
отклонение элеронов от балансировочного положения А8Э равно сумме
ручного отклонения элеронов пилотом посредством баранки штурвала Д8*
и автоматического отклонения демпфером крена:
Д5Э = Д5? + Дб»".
188
(6.52)
Функциональная схема аналогового демпфера крена аналогична схеме
демпфера тангажа (рис. 6.6). Отклонение элеронов А8^ создается пилотом
путем перемещения баранки штурвала (БШ) на величину Ах, от балансировочного положения. С помощью дифференциальной качалки осуществляется суммирование этого сигнала с управляющим сигналом демпфера крена
Д8^ к . Рулевой привод элеронов РП8Э формирует отклонение элеронов.
Работа демпфера крена аналогична работе демпфера тангажа, с той
разницей, что при возникновении угловой скорости крена ю, датчик ДУС
вырабатывает электрический сигнал им , пропорциональный этой скорости.
Вычислитель В вырабатывает управляющий сигнал ив согласно закону
управления (6.47). Сервопривод преобразует этот сигнал в перемещение
штока рулевого агрегата элеронов А8 *".
Влияние демпферов крена на поперечную устойчивость и управляемость.
Покажем, что с помощью демпфера крена улучшается степень поперечной
статической устойчивости самолета т™". При отклонении элеронов демпфером появляется приращение коэффициента момента крена
Возьмем частную производную "выражения (6.53) по угловой скорости
сох:
Ат™ х = к й ) х т х '.
(6.54)
Следовательно, при включенном демпфере крена:
,
<о Дк
о
(тх ) = т х
^„Шх'-
|(пСП>|пС|,
(6.55)
(6.56)
что доказывает повышение статической устойчивости бокового движения.
МЗ
Рис. 6.6. Функциональная схема аналогового демпфера крена
189
Рис. 6.7. Переходные процессы в контуре угловой скорости крена и угла крена при
отклонении пилотом элеронов:
а-свободный самолет; б-при включенном демпфере крена
Убедимся в том, что с помощью демпфера крена улучшается динамическая устойчивость бокового движения. На рис. 6.7 показаны переходные
процессы, возникающие в результате ступенчатого отклонения пилотом
элеронов на угол Д5 *. Демпфер крена уменьшает постоянную времени по
угловой скорости крена Т™ < Т Юх . Однако так как отклонение элеронов
демпфером А5," вычитается из отклонения элеронов пилотом Лб,, общее
отклонение элеронов А5Э становится меньше. Это приводит к уменьшению
установившегося значения угловой скорости крена (со?к)Уст по сравнению
с управлением без демпфера, т. е. эффективность управления элеронами от
штурвала уменьшается. Это является основным недостатком демпфера
крена.
Управление элеронами пропорционально угловому ускорению крена оЬх
в демпферах крена распространения не получило. Это объясняется тем, что
такой демпфер крена, увеличивая эффективность поперечного управления,
уменьшает демпфирование боковых колебаний.
6.2.2. Моделирование демпфирования колебаний по крену
Рассмотрим модель- быстрого бокового движения «чистого крена» по
угловой скорости и углу крена (4.54) при наличии управляющих воздействий пилота на штурвал и включенном демпфере крена. Модель содержит
уравнение состояния, уравнения выхода и входа, закон управления элеронами ручного контура и закон управления демпфера крена:
*66 Ю = Ам х66 (1) + В'6 и*б6 (I),
(6.63)
(6.64)
У«Ю =
(6.65)
(6.66)
190
А5
Убб(1)-
(6.67)
Параметры модели определяются следующим образом:
_
; - |_
а
«>х. «э
0
],
Ч-«ж
° 1
-V
О
п-1'
г^ди _ Г 1,
"бб - I кш
(6.68)
0],
Подставим уравнения выхода (6.64) и входа (6.65), а также законы
управления (6.66) и (6.67) в уравнение состояния (6.63) и выполним преобразование Лапласа при нулевых начальных условиях:
(р! - А^ - В?6 В6Д|)У66(р) = В^ В?6 АХ Э (р).
(6.69)
Получим вектор передаточных функций системы «самолет-демпфер
крена» в быстром боковом движении самолета по угловой скорости и углу
крена на отклонение пилотом штурвала при включенном демпфере крена
АХ э (р)
= ( Р 1-А 6 5 -В 5 6 В ) - 1 В 6 6
= Ф6д6'(р)В6606>6.
(6.70)
Переходная матрица состояния быстрого бокового движения самолета
при включенном демпфере крена
(6.71)
Ф6Д6К(Р) = (Р1-А 66 -
Элементами вектора ХУ^р) являются передаточные функции самолета
по параметрам быстрого бокового кренового движения на управляющее
воздействие пилота АХэ(р). Соответствующие, параметры вектора выхода
^ее (Р) совпадают в рассматриваемом случае с вектором переменных состояния быстрого бокового кренового движения Х66(р)
(6.72)
Переходная матрица состояния
(6.73)
Определитель матрицы
-О
|Фбб'(Р)1 =
= Р [Р - ^, шх -
•
(6.74)
191
Присоединенная матрица
{ФЙ(Р)}пр =
а
(6.75)
г, Шх Р
Тогда
(6.76)
Лтг
к,„Д
(6.77)
Определим характеристики передаточных функций:
к•»,.
М'
1с 6 '"=-
тдк«о. = - -
Бэ
(6.78)
(6.79)
^«4
Таким образом, демпфер крена уменьшает постоянную времени по
угловой скорости крена Тт < Т ш , но вместе с этим и коэффициент
8ДК
и
усиления 1ст' < 1с.ш3. На рис. 6.8 представлена структурная схема замкнутой
системы «самолет - демпфер крена». Сворачивая эту схему, можно получить передаточную функцию (6.76). Анализ этих передаточных функций
показывает, что демпфер крена с законом управления (6.51) не влияет на их
структуру, а лишь изменяет характеристики образующих звеньев.
Маневр самолета в боковой плоскости осуществляется энергичным
отклонением пилотом штурвала на величину А х э . При этом закон изменения А53 = к ш э Ах э близок к ступенчатому, т.е. Ахэ(1) = 1 (1)Ахэ и Ах э (р) =
= Ах э /р. На этапе быстрого бокового кренового движения произойдет
формирование нового установившегося значения угловой скорости крена
(Аш х )- = шп {Лхэ(Р)^(р)} = 11т {^Ь ^
1->о
Р->О ( р -рв; _|_
Р
= к ш . э к|'Ах э .
(6.80)
Так как согласно (6.78) к ш . э к*" < к ш . э 1Сщ», то (Аюх)^т < (Ао> х ) уст . Реакция самолета на ступенчатое отклонение баранки штурвала описывается
переходной функцией
Ах
0)х
•Ах,
рСГГр+1)
192
(6.81)
Рис. 6.8. Структурная схема замкнутой системы «самолет-демпфер
крена»
Перейдем от изображения Асох(р) к оригиналу:
Время переходного процесса 1йк, по истечении которого отличие угловой скорости крена от установившегося значения будет равно 5%, опреде_,д./тда
ляется из условия е " 7 <"• = 0,05. Отсюда 1ЙК - -1пО,05Т^ ^ ЗТ^ . Таким
образом, включение демпфера крена в проводку управления эл'еронами
приводит к уменьшению времени переходного процесса, однако снижет
эффективность поперечного управления.
6.3. АВТОМАТИЧЕСКОЕ ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ
ПО РЫСКАНИЮ
6.3.1 Демпферы рыскания
В режиме ручного (штурвального) управления пилот наблюдает за
рысканием самолета по указателю курсовой системы и воздействует на
педали при возникновении колебаний таким образом, чтобы отклонение
руля направления противодействовало бы этим колебаниям. Для освобождения пилота от решения этой задачи служат демпферы рыскания.
Демпфер рыскания (ДР) - средство автоматического управления, обеспечивающее демпфирование колебаний самолета по рысканию путем отклонения руля направления при возникновении угловой скорости рыскания.
Простейший демпфер, рыскания реализует следующий закон управления рулем направления:
р
А82 = к Щ у со у ,
(6.83)
где Д8^-автоматическое отклонение руля направления от балансировочного положения демпфером рыскания; 1сщ -передаточный коэффициент по угловой скорости
рыскания, показывающий, на какой угол должен отклониться руль направления при
изменении угловой скорости рыскания на 1°/с (1 рад/с).
Другими словами, отклонение руля направления демпфером рыскания
пропорционально угловой скорости рыскания.
Демпферы рыскания применяются на самолетах с бустерной или электродистанционной системой управления, если собственная путевая устой7 Зап. 948
'93
Г'
ДУ(,
"й>у
1 г*
1и
/ос
;
А8„
ч Г
1ч
У
•**/
мМ
лпг
— 1[
\
1
л 1
1
(канал РН) \
л8ри
®=> РП8Н
Рис. 6.9. Функциональная схема аналогового демпфера рыскания
чивость самолета неудовлетворительна. Исполнительные устройства сервоприводов демпферов рыскания-рулевые агрегаты включаются в механическую проводку управления по последовательной схеме. Поэтому общее
отклонение руля направления от балансировочного положения А8 Н равно
сумме ручного отклонения руля направления пилотом посредством педалей
А5 Р и автоматического отклонения руля направления демпфером рыскания:
А5„ = А5 р + А62 р .
(6.84)
Функциональная схема аналогового демпфера рыскания аналогична
функциональным схемам демпферов тангажа и крена (рис. 6.9). Отклонение
Р
руля направления Д8 создается пилотом путем перемещения педалей П на
величину Ах н от балансировочного положения. С помощью дифференциальной качалки осуществляется суммирование этого сигнала с управляющим сигналом демпфера рыскания Л5* р . Рулевой привод руля направления
РПЬЯ формирует отклонение руля направления.
Рис. 6.10. Переходные процессы в контуре угловой скорости рыскания при отклонении пилотом руля направления:
а-свободный самолет; б-при включенном демпфере рыскания
194
При возникновении угловой скорости рыскания соу датчик ДУС вырабатывает электрический сигнал и ш , пропорциональный этой скорости. Вычислитель В вырабатывает управляющий сигнал и в согласно закону управления (6.83) на вход сумматора С сервопривода руля направления С/75Н.
Сервопривод преобразует этот сигнал в перемещение штока рулевого
агрегата руля направления А82 Р .
Влияние демпферов рыскания на путевую устойчивость и управляемость.
Покажем, что с помощью демпфера рыскания улучшается степень путевой
т
п
статической
устойчивости самолета т у у . При
отклонении руля направления
демпфером появляется приращение коэффициента момента рыскания
А т у = ту"А52 Р = ту Н к 0); 0) у .
(6.85)
Возьмем частную производную выражения (6.85) по угловой скорости соу :
= к Щ П1у Н .
(6.86)
Следовательно, при включенном демпфере рыскания:
др
(т"')
= т"
т"у +
"') =
т,",
(6.87)
|(ту"Г|>|т^|,
(6-88)
т.е. степень путевой статической устойчивости самолета с демфером
рыскания выше, чем степень собственной путевой статической устойчивости самолета.
Покажем, что с помощью демпфера рыскания улучшается динамическая
устойчивость бокового движения. На рис. 6.10, а представлены переходные
процессы, возникающие в результате ступенчатого отклонения пилотом
руля направления на угол А5Ц . Как видно из графиков рис. 6.10, б, демпфер
рыскания уменьшает колебательность переходных процессов по угловой
скорости и углу рыскания - уменьшаются период короткопериодических
колебаний и время затухания. Так как отклонение руля направления
демпфером Д8^р вычитается из отклонения руля направления пилотом А8 Р ,
общее отклонение руля направления А5 Н становится меньше. Это приводит
к уменьшению установившегося значения угловой скорости рыскания
р
о>у уст по сравнению с управлением без демпфера, т. е. эффективность
управления рулем направления от педалей уменьшается.
Особенности законов управления демпферов рыскания. Разновидностями
демпферов рыскания являются демпферы, реализующие следующие законы
управления:
А5^ = Цю у = к й у рсо у ,
Тщур
к й - — со у .
Тй,Р+1
(6.89)
(6.90)
195
РИС. 6.11. Структурная схема демпфера рыскания АБСУ-154
В законе управления (6.89) управляющий параметр-угловое ускорение
рыскания юу , получаемое дифференцированием в ДУС сигнала ю у . Изодромный фильтр Т Л р/(Т й р + 1) закона управления (6.90) реализуется
в вычислителе блока 'демпфера, например, с помощью КС-цепочки.
Законы управления демпферов рыскания (6.89) и (6.90) позволяют
уменьшить неблагоприятное влияние демпфера рыскания на путевую управляемость. Это достигается возвращением штока рулевого агрегата
в нейтральное положение, когда <Ьу = 0, т.е. Д8Ц Р = 0 при со^руст = сопз1.
Поэтому противодействие демпфера пилоту прекращается и расход перемещения педалей для создания угловой скорости не изменяется. При этом,
естественно, ухудшаются характеристики устойчивости.
Кроме уменьшения неблагоприятного влияния на путевую управляемость демпферы рыскания с законом управления (6.89) и (6.90) устраняют
негативные последствия взаимосвязи движений по рысканию и крену. Так,
в установившемся развороте с креном демпфер рыскания с законом
управления (6.83) противодействует развороту отклонением руля направления при возникновении угловой скорости ю у . Фильтрация постоянной
Рис. 6.12. Структурная схема демпфера рыскания АСУУ-86
196
составляющей этой скорости законами управления (6.89) и (6.90) позволяет
держать руль направления в нейтрали при совершении разворота и реагировать лишь на колебательность углового движения относительно постоянной составляющей скорости разворота.
Для дополнительного демпфирования самолета при заходе на посадку,
когда скорость самолету мала и эффективность руля направления снижается, в закон управления (6.52) включается дополнительный демпфирующий
сигнал, пропорциональный угловой скорости рыскания,
(6.91)
где Р азп принимает значение, равное 1 при включении режима автоматического
захода на посадку (АЗП) и 0 во всех остальных режимах.
Структурная схема демпфера рыскания, реализующего закон управления (6.91), представлена на рис. 6.11. Таким образом осуществляется
демпфирование колебаний по рысканию с помощью системы АБСУ-154.
На малых скоростях полета требуется дополнительное демпфирование
самолета по рысканию при вхождении самолета в крен и при отклонении
элеронов. Тогда в закон управления (6.90) включаются дополнительные
сигналы, пропорциональные углу крена и углу отклонения элеронов,
пропущенные через изодромные фильтры с постоянными времени Т^, и Т ^:
= к й - А _ Шу + р зак
ц
* _у + ^ _
_8,,
(6.92)
где Р,ак принимает значение, равное 1 при выпуске закрылков на угол 30° и 0 при
убранных закрылках.
Датчиком сигнала, пропорционального углу крена, служит гировертикаль ГВ. Датчиком сигнала, пропорционального углу отклонения элеронов,
служит датчик обратной связи рулевой машины автопилота. Датчиком
выпуска закрылков является концевой выключатель КВ8ЫК.
Структурная схема демпфера рыскания, реализующего закон управления (6.92), представлена на рис. 6.12. Таким образом осуществляется
демпфирование колебаний по рысканию с помощью системы АССУ-86.
Основной характеристикой боковой устойчивости самолета является
степень путевой статической устойчивости по углу скольжения т§ . Для ее
увеличения и демпфирования боковых колебаний самолета в демпфере
рыскания необходимо использовать сигнал, пропорциональный угловой
скорости скольжения р\ Однако создание датчиков такого сигнала затруднено, поэтому используют следующую упрощенную зависимость угловой
скорости скольжения $ от угловых скоростей рыскания и крена в горизонтальном полете с постоянным углом атаки а 0 :
юх8та0.
(6.93)
197
Рис. 6.13. Структурная схема демпфера рыскания ДР-62
Следовательно, для эффективного демпфирования колебаний самолета
по углу скольжения необходимо в демпфере рыскания помимо сигнала,
пропорционального угловой скорости рыскания, вводить сигнал, пропор*
циональный угловой скорости крена. Тогда закон управления принимает
следующий вид:
(6.94)
где ^^ =
Таким образом, анализ одного из простейших средств автоматизации
бокового движения самолета показывает необходимость учета взаимодействия движений рыскания и крена.
Так как сигналы с ДУС, пропорционльные угловым скоростям, содержат помехи, то для их фильтрации применяется апериодический фильтр
с постоянной времени Тф = 0,1 -=- 0,2 с.
Закон управления имеет вид
1
+
1
(6.95)
ТШ„Р + 1
Передаточный коэффициент 1сш корректируется по положению закрылков (принимает большее значение при выпущенных закрылках и уменьшается при убранных).
Структурная схема демпфера рыскания, реализующего закон управления (6.95), представлена на рис. 6.13. Так осуществляется демпфирование
колебаний по рысканию с помощью демпфера рыскания ДР-62.
198
6.3.2. Моделирование демпфирования колебаний
по рысканию
Рассмотрим модель быстрого бокового движения «чистого рыскания»
по угловой скорости рыскания и углу скольжения (4.23) при наличии
управляющих воздействий пилота на педали и включенном демпфере
рыскания. Модель содержит уравнение состояния, уравнения выхода и входа, закон управления рулем направления ручного контура и закон управления рулем направления ручного контура и закон управления демпфера
рыскания:
Х 66 (1) = А д д Х д ^ Г ) + В ^ Ц ^ ,
(6.96)
(6.97)
),
(6.98)
(6.99)
(6.100)
Параметры модели определяют так:
. , Л _Г А «М 1 >1
Ч.Р]
Абб:
а« « -I
(6.101)
др ~
— 1Гк ш„
ъ
О ее
0
и
л"1
^•
Подставим уравнения выхода (6.97), входа (6.98) и законы управления
(6.99) и (6.100) в уравнение состояния (6.96) и выполним преобразование
Лапласа при нулевых начальных условиях:
(р! - А66 - В&08?) У66(р) = В| 6 О^ДХ Н (Р).
(6-102)
Получим вектор передаточных функций замкнутой системы «самолет демпфер рыскания» в быстром боковом движении по рысканию и скольжению на отклонение пилотом педалей при включенном демпфере рыскания:
-
66
(6.103)
= В1ъ^66Ф^(р),
где Ф^(р) = (р! — А 66 — В ^ О ее ) ' -переходная матрица состояния быстрого бокового движения самолета, управляемого демпфером рыскания.
Элементами вектора XV ^(р) являются передаточные функции самолета
по параметрам быстрого бокового движения «чистого рыскания» на управляющее воздействие пилота ДХн(р):
/ (р)
До,
\^;(Р)] •
Ар
(6-104)
199
Переходная матрица состояния
(6.105)
Определитель матрицы
Р ~~
а
~ <в,,
а
Р~ р
-а
Коэффициент демцфирования и частота боковых короткопериодических
колебаний самолета, управляемого демпфером рыскания:
1
1
= — (М™'
у + Р 2 + М "к щ ),
2
*
У
У
)
а
а
а
(6.107)
а
- со,,ш у р,р - р, Ш у «,,о) у ,р
(6.108)
Присоединенная матрица
Р-ав
Р,соу
(6.109)
Р~
Тогда переходная матрица состояния
1
-(р-ар,р)
Р о>
1
*ар\гг
А^(Р)
А д р (р)
а
, (6.110)
(Р ~~
а вектор передаточных функций самолета
(6.111)
200
или
6
к
„
^ д™ (Р) = - ^ - ,
(6-1 12)
Время и относительный коэффициент демпфирования боковых короткопериодических колебаний самолета, управляемого демпфером рыскания:
1
др
1к =
т
V а ш у ,ш, а р,р — а р,ш у а ш,,р
1
(6.114)
5в
1У1Л.
М к
др
1
р = - г (аа,;,ш, + а м + а Ш ! Л к Ю у ) х
V а о>»,«>, а Р,Р ~ а р,ш у а ю,,р
(6.115)
8
/ 1 + к у кЮу'
V
Ю
(со^)2 = —— = со2р (1 + Цк*;).
(6.116)
Коэффициенты усиления самолета, управляемого демпфером рыскания:
<
ь5'Р = - —'
хдр
«=
VР8 -
<6Л17)
к
-
-.
(6.118)
201
Рис. 6.14. Структурная схема
замкнутой системы «самолет-демпфер рыскания»
На рис. 6.14 представлена структурная схема замкнутой системы «самолет-демпфер рыскания». Сворачивая эту схему, можно получить передаточную функцию (6.112).
Таким образом, демпфер рыскания с законом управления (6.83) не
влияет на вид передаточных функций, но изменяет характеристики образующих их звеньев. Анализ выражений (6.114)-(6.118) показывает, что
демпфер рыскания положительно влияет на характеристики колебательного звена передаточных функций. Постоянная времени Тр р уменьшается,
частота собственных колебаний Юрр и относительный коэффициент затухания ^рр увеличиваются. Однако при этом уменьшаются коэффициенты
усиления к " и к " .
,„,
р
Для снижения негативного влияния демпфера рыскания на путевую
управляемость сигнал угловой скорости соу в законе управления (6.90)
пропускается через изодромный фильтр.
Рассмотрим работу демпфера рыскания с изодромным законом управления (6.90) по демпфированию колебаний различной частоты. Передаточная функция демпфера имеет вид
д
А5 н (р)
(6.119)
Представим передаточную функцию (6.119) в несколько ином виде,
поделив числитель и знаменатель на То, :
,Дю'„
(6.120)
р+—
ТА
Из (6.120) видно, что при 1/Тй = 0 мы имели бы ^Д6*(р) ^ к й , т.е.
«идеальный» демпфер рыскания. Это условие выполняется при больших
частотах колебания, когда после замены р = )ю:
,д<оу
202
(6.121)
и второе слагаемое в знаменателе (6.121) мало по сравнению с первым.
Тогда
(6.122)
т. е. при высокочастотных колебаниях демпфер рыскания отклоняет руль
направления пропорционально угловой скорости рыскания, что от него
и требуется. При малых частотах колебаний демпфер рыскания начинает
работать как дифференцирующее звено, так как при со -» О
т
-»ч
*>Ч 1 --
ч ]со
<6Л23>
10)
14
Когда (о -» 0, а юу -» сош1 и юу -» 0, выходной сигнал изодромного
фильтра и управляющий сигнал демпфера рыскания будут стремиться
к нулю. В результате при развороте с постоянной скоростью демпфер
рыскания воздействовать на руль направления не будет.
Довороты самолета в боковой плоскости, а также устранение скольжения осуществляются энергичным отклонением пилотом педалей на величину
А х н . При этом закон отклонения руля направления А5 Н = к ш . н Ах н близок
к ступенчатому. На этапе быстрого бокового движения происходит формирование нового установившегося значения угловой скорости рыскания:
(Ао)?")уст = 11т { р А х „ ( р ) \ У ( р ) } = 11т
р-0
'
Р-»0
'
8
(.
р
ДР
•*
= к ш . н к ' Ах„ =
Ах н .
(6.124)
1 -I1с 1с '
I ^СОу^Ш,
1
Так как согласно (6.117) кш^ кш.н < к ш 'к ш . н , то Асо др уст < Аю у у с т . Это
показано на рис. 6.8. Реакция самолета на 'ступенчатое отклонение педалей
описывается переходными функциями:
8ЛР
Ах
л
Ь:"(Тч,р+1)
Асо?" (р) = — = ^^ (р) = - =« - Ах„ , (6.125)
'
ДР
Ап 2 я
Р
У°Р 2,
(р) = --
к5"'
УВ
2
Ш
-
Р
Ах н
+ 2т;чГр + 1]
.
(6.126)
203
ДР
Перейдем от изображения АП* (р) к оригиналу:
„др , др
АпГ(1) =
-к*"' \1--=^
8
И
У,Р I
/1 _ ,
VI
-Йр /Тр )1
С
+ агсзт1-(
81П X
Дх„.
(6.127)
Выражение (6.127) определяет переходный процесс в боковом короткопериодическом колебательном движении самолета с демпфером рыскания
при отклонении педалей пилотом. Анализ выражения (6.127) показывает,
что оно аналогично выражению (6.43) для нормальной перегрузки. Динамические характеристики боковой устойчивости и управляемости определяются аналогично (6.44). Таким образом, включение демпфера рыскания
в проводку управления рулем направления приводит к уменьшению колебательности процесса управления, однако снижает эффективность путевого
управления от педалей.
Глава 7
АВТОМАТИЧЕСКОЕ УЛУЧШЕНИЕ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ
Если самолет обладает неудовлетворительными характеристиками устойчивости и управляемости или эти характеристики существенно меняются по режимам полета, возникает задача их улучшения с помощью
соответствующих автоматических средств.
В качестве средств автоматического улучшения устойчивости самолета
применяют автоматы устойчивости, среди которых различают автоматы
продольной устойчивости и автоматы боковой устойчивости. Их общей
особенностью является отклонение руля при возникновении перегрузок
относительно соответствующей связанной оси самолета.
Разделение средств автоматического демпфирования и улучшения устойчивости самолета на автоматы демпфирования и устойчивости достаточно условно, так как демпфирование и устойчивость-взаимосвязанные
свойства самолета. Кроме того, на современных самолетах автоматы
демпфирования и устойчивости комплексируются в единой системе и работают одновременно и согласованно.
Автоматическое улучшение управляемости самолета осуществляется
путем отклонения рулей средствами автоматического управления при
воздействии пилота на рычаги управления и изменения параметров короткопериодического движения самолета либо изменением кинематики системы управления рулями по режимам полета. "Благоприятное влияние авто204
матики на характеристики управляемости проявляется в улучшении качества и обеспечении стабильности переходных процессов выхода самолета на
новый режим полета после целенаправленного воздействия пилота на
рычаги управления. При этом сохраняются требуемые характеристики
демпфирования и устойчивости.
В качестве средств автоматического улучшения управляемости самолета
применяют автоматы управления, автоматы регулирования управления
и загрузки, автоматы триммирования.
Среди автоматов управления различают автоматы продольного управления и бокового управления. Их общей особенностью является дополнительное к ручному автоматическое отклонение руля при воздействии
пилота на рычаги управления. При наличии на самолете бустерной системы
управления автоматическое отклонение руля суммируется с ручным отклонением руля посредством механической проводки. При наличии на самолете электродистанционной системы управления автоматическое отклонение руля суммируется с электродистанционным отклонением. Иногда
автомат управления сам представляет собой электродистанционную систему управления и берет на себя все ее функции. На современных самолетах
автоматы управления комплексируются с автоматами демпфирования
и устойчивости в единой системе и работают одновременно и согласованно.
Среди автоматов регулирования управления различают автоматы регулирования продольного, путевого и поперечного управления. Аналогичным
образом классифицируют автоматы регулирования загрузки. Общая особенность этих автоматов - обеспечение постоянства статических характеристик управляемости при изменении режимов полета путем воздействия
на кинематику механической проводки управления.
7.1. АВТОМАТИЧЕСКОЕ УЛУЧШЕНИЕ УСТОЙЧИВОСТИ
ПО ПЕРЕГРУЗКАМ
Устройство и работа автоматов продольной устойчивости. Автоматы
демпфирования не полностью решают проблему улучшения пилотажных
свойств самолета, так как компенсируют лишь недостаточное собственное
демпфирование самолета. Вследствие действия внешних продольных возмущений, даже при включенном демпфере тангажа, у самолета могут
измениться угол атаки и нормальная перегрузка. Поэтому необходимо
сохранить исходный режим полета по углу атаки и нормальной перегрузке.
Для освобождения пилота от решения этой задачи служат автоматы
продольной устойчивости.
Автомат продольной устойчивости (АПУ)— средство автоматического
управления, обеспечивающее повышение устойчивости самолета по углу
атаки и нормальной перегрузке на всех этапах полета путем отклонения
Руля высоты при возникновении приращения угла атаки или избыточной
нормальной перегрузки.
205
НаРВ
Рис. 7.1. Функциональная схема автомата продольной устойчивости
Простейшие автоматы продольной устойчивости реализуют следующие
законы управления рулем высоты:
Д6»
1саДа,
(7.1)
= к„ Дп„
(7.2)
ПУ
где Д8* -отклонение руля высоты автоматом продольной устойчивости; Да =
= (а — а0)- приращение угла атаки относительно опорного значения, имевшего
место в момент включения автомата; Дпу = (пу — 1)-избыточная нормальная перегрузка; ка-передаточный коэффициент по приращению угла атаки, показывающий,
на какой угол должен отклониться руль высоты при изменении угла атаки на 1°;
1сп -передаточный коэффициент по избыточной нормальной перегрузке, показывающий, на какой угол должен отклониться руль высоты при изменении избыточной
нормальной перегрузки на единицу.
В связи с недостаточной точностью датчиков угла атаки и необходимостью создания специальных схем для запоминания опорного значения
угла атаки закон управления (7.1) большого распространения не получил.
Поэтому обычно используется закон управления (7.2), который часто
комплексируется с законом управления демпфера тангажа:
То есть отклонение руля высоты автоматом продольной устойчивости
пропорционально угловой скорости тангажа и избыточной нормальной
перегрузке.
Благодаря последовательному включению исполнительного устройства
автомата в механическую проводку бустерной или электродистанционной
системы управления рулем высоты при совместном управлении самолетом
пилотом и автоматом полное отклонение руля высоты от балансировочного положения Д5В равно алгебраической сумме
Д6В = Д8? + Дбв ПУ •
В состав автомата продольной устойчивости (рис. 7.1) входят датчик
линейного ускорения ДЛУ, датчик угловой скорости ДУС, вычислитель
ВАПУ и сервопривод руля высоты СЯ8В. Автомат продольной устойчивости работает следующим образом. При изменении нормальной перегрузки на вход вычислителя В с датчиков ДУС и ДЛУ поступают сигналы
иш и ип . Сигнал ип преобразуется в сигнал и4п .
206
Эти сигналы суммируются согласно закону управления (7.3). Управляющий сигнал и0 вызывает отработку сервоприводом руля высоты. При
ПУ
отклонении руля высоты на угол А§„ возникает управляющий аэродинамический момент М.,.3 , противоположный по знаку возмущению. Поэтому
угловая скорость шг и избыточная нормальная перегрузка начнут уменьшаться, а вместе с ними и сигналы ию с ДУС и и с ДЛУ. Когда угловая
скорость тангажа станет равной нулю'Ссо^ = 0), руль высоты все еще будет
отклонен автоматом продольной устойчивости благодаря еще имеющемуся сигналу ип с ДЛУ (тогда как демпфер тангажа в этот момент возвращал
руль высоты* в балансировочное положение). Поэтому угловая скорость
тангажа саг поменяет знак и избыточная перегрузка Апу начнет интенсивно
уменьшаться. Когда сигналы ии и ип уравновесят друг друга, АПУ вернет
руль высоты в балансировочное положение. Дальнейшая отработка руля
будет вызвана сменой знака суммы сигналов ит и и , что приведет
к плавному возвращению самолета к исходной нор'мальной перегрузке.
Влияние автоматов продольной устойчивости на устойчивость и управляемость. Покажем, что с помощью автомата продольной устойчивости
повышается степень продольной статической устойчивости по перегрузке.
Влияние демпферной части закона управления (7.3) на характеристики
продольной устойчивости и управляемости показано в § 6.1. Рассмотрим
влияние составляющей закона управления по избыточной нормальной
перегрузке.
При отклонении руля высоты автоматом продольной устойчивости
появляется приращение коэффициента момента тангажа
Ат2 = т*1 А6*пу = т^-ЦАПу.
С учетом того, что на малых углах атаки Ап у = 1с" Да, где 1с" - коэффициент пропорциональности, степень продольной статической устойчивости
по перегрузке самолета, управляемого АПУ, определится согласно (3.30)
следующим образом:
/дтк \
АРУ~_\ А * I)
СТп
\
ОСу
у
"
/ у =; СОП31
к„ т/
АПУ
- оп +' —
- ст 4- Асг
~ п ^
П
а
~
ЛО
/^
с
у,
Так как п^' < 0, то приращение степени продольной статической устойчивости по перегрузке при использовании автомата продольной устойчивости Аа АПУ < 0. Следовательно, | о„пу | > | ап |.
Покажем, что с помощью автомата продольной устойчивости улучшается динамическая устойчивость продольного движения. Как видно из
рис. 7.2, характеристики динамической устойчивости самолета с АПУ-период колебаний Тк и время затухания ^„-уменьшаются. Автомат продольной устойчивости так же, как и демпфер тангажа, позволяет снизить
колебательность продольного короткопериодического движения самолета
и уменьшить длительность переходных процессов. Вместе с тем увеличивается частота продольных короткопериодических колебаний у к .
Величина V, зависит от запаса статической устойчивости самолета по
207
перегрузке, который в течение полета меняется в широких пределах. При*
этом увеличение запаса устойчивости ухудшает демпфирование. Демпфег»ная часть закона управления (7.3) увеличивает коэффициент демпфирования
Ьк и попутно способствует некоторому увеличению частоты собственных
колебаний У К . Составляющая закона управления по перегрузке также
увеличивает частоту У К . Таким образом, подбором передаточных коэффициентов кЮг и кДп удается снизить запас статической устойчивости по
перегрузке, компенсируя смещение фокуса вперед обратной связью по
перегрузке.
Другим важным преимуществом автоматов продольной устойчивости
является их способность возвращать самолет к исходному режиму полета
по нормальной перегрузке. При длительном возмущении появляется статическая ошибка в виде установившегося значения избыточной перегрузки
Апу.уст. Поэтому АПУ с законами управления (7.2) и (7.3) называют
статическими. Для ликвидации статической ошибки применяют более
сложные законы управления, например с интегрированием сигнала с датчика ДЛУ.
Основной недостаток автомата продольной устойчивости уменьшение
эффективности управления рулем высоты от колонки штурвала, так как
отклонение руля высоты автоматом А6^пу вычитается из отклонения руля
высоты пилотом А8§. Это приводит к уменьшению интенсивности вертикального маневра.
Устройство и работа автоматов боковой устойчивости. Демпферы крена
и рыскания не могут противодействовать изменению угла скольжения
и боковой перегрузки. Поэтому наряду с задачей демпфирования боковых
короткопериодических колебаний возникает задача сохранения исходного
режима полета по углу скольжения и боковой перегрузке. Особенно это
актуально при развороте, когда пилот воздействует на элероны. Для
противодействия возникающему при этом скольжению и связанной с ним
боковой перегрузке пилот, наблюдая за указателем угла скольжения,
отклоняет руль направления. Разворот при этом становится координированным. Для освобождения пилота от решения этой задачи служат автоматы боковой устойчивости.
Рис. 7.2. Переходные процессы в контуре угловой скорости тангажа и нормальной
перегрузки при кратковременном внешнем возмущении:
а-свободный самолет; б-при включенном автомате продольной устойчивости
208
Автомат боковой устойчивости (АБУ) -средство автоматического
управления, обеспечивающее повышение устойчивости самолета по углу
скольжения и боковой перегрузке на всех этапах полета путем отклонения
руля направления при возникновении приращения угла скольжения или
боковой перегрузки.
Простейшие автоматы боковой устойчивости реализуют следующие
законы управления рулем направления:
А5*БУ = к р Ар,
(7.4)
А5* Б У =-к„п г ,
(7.5)
где Д8*БУ-отклонение руля направления автоматом боковой устойчивости; Д() =
= (Р — Ро)- приращение угла скольжения относительно опорного значения; Кр,
1сп>-передаточные коэффициенты по приращению угла скольжения и боковой"
перегрузке (пг0 = 0).
Невысокие точностные характеристики известных датчиков утла скольжения не позволяют широко применять закон управления (7.4). Поскольку
углы скольжения обычно малы, то боковая перегрузка практически пропорциональна углу скольжения. Так как измерение боковой перегрузки
не вызывает затруднений, закон управления (7.5) распространен более
широко.
Обычно автомат боковой устойчивости объединяется с демпфером
рыскания и имеет закон управления
А5*БУ = к ю ш у - к п п г .
(7.6)
При совместном управлении пилотом и автоматом полное отклонение
руля направления от балансировочного положения равно алгебраической
сумме
БУ
Д8„ = А§Р + А5* .
Функциональная схема автомата боковой устойчивости аналогична
схеме АПУ. Отличие заключается в том, что датчик угловой скорости ДУС
ориентирован по измерительной оси ОУ, а датчик линейных ускорений
ДЛУ-по измерительной оси О2. Вычислитель ВАБУ вырабатывает управляющий сигнал иа согласно закону управления (7.6) на основе сигналов
иш и и п . Автомат содержит сервопривод руля направления СШН. Работа
АбУ аналогична работе АПУ.
Влияние автоматов боковой устойчивости на устойчивость и управляемость. Покажем, что с помощью автомата боковой устойчивости повышается степень путевой статической устойчивости по углу скольжения т,.
Демпферная часть закона управления (7.6) обеспечивает увеличение степени
путевой статической устойчивости по угловой скорости рыскания т™'.
Рассмотрим влияние составляющей закона управления по боковой перегрузке.
При отклонении руля направления автоматом боковой устойчивости
появляется приращение коэффициента момента рыскания
Ат у = ту" Д8нБУ = — ту"кп п г .
209
Рис. 7.3. Структурная схема автомата продольной устойчивости
о
о
Известно, что при малых углах скольжения пг = — кПгЛр, где кп -коэффициент пропорциональности. Тогда приращение частной производной
коэффициента момента рыскания по углу скольжения
Следовательно, при включенном автомате боковой устойчивости:
РчАБУ| > | тшР|
I \ у/
I •* 1 у1 •
|Г ш
Анализ влияния автомата боковой устойчивости на динамические ха-,
рактеристики бокового движения аналогичен проведенному анализу для
АПУ. Недостатком автомата боковой устойчивости является уменьшение
эффективности путевого управления.
Особенности законов управления автоматов продольной и боковой устойчивости. Для обеспечения астатизма управления при длительных внешних
Рис. 7.4. Структурная схема автомата боковой устойчивости
210
возмущениях в закон управления АПУ вводят сигнал, пропорциональный
интегралу от избыточной нормальной перегрузки (рис. 7.3):
Т п
К
0 +
**
ЛПу +
АПу
'
(7 7)
'
где ^п -передаточный коэффициент по интегралу от избыточной нормальной
перегрузки.
Для ликвидации статической ошибки автоматов боковой устойчивости
по углу скольжения при длительных внешних возмущениях применяется
интегрирование сигнала с датчика ДЛУ либо использование скоростной
обратной связи в сервоприводе автомата:
Р
А5й = Ц(Ь у -к п п г .
(7.8)
Тогда в законе управления (7.8) вместо сигнала угловой скорости соу
следует использовать ее производную о>у для сохранения демпфирующих
свойств автомата (рис. 7.4). Так обеспечивается улучшение путевой устойчивости с помощью систем САУ-62 и САУ-86.
7.2. АВТОМАТИЧЕСКОЕ УЛУЧШЕНИЕ ПРОДОЛЬНОЙ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ
7.2.1. Автоматы продольного управления
Устройство и работа. Демпферы тангажа и автоматы продольной
устойчивости обладают одним общим недостатком: снижают эффективность продольного управления самолетом от колонки штурвала. Если
к тому же самолет обладает неудовлетворительными характеристиками
продольной управляемости, пилоту приходится компенсировать снижение
эффективности продольного управления дополнительным отклонением
колонки штурвала и руля высоты. Автоматы продольного управления
служат для освобождения пилота от решения этой задачи.
Автоматы продольного управления (АПУ)-средства автоматического
управления, обеспечивающие улучшение продольной управляемости самолета на всех этапах и во всех режимах полета путем отклонения руля
высоты при воздействии пилота на колонку штурвала.
Простейший автомат продольного управления реализует следующий
закон управления рулем высоты:
А5*пу = к х Дх в ,
(7.9)
где Д5^ПУ-автоматическое отклонение от балансировочного положения руля высоты автоматом продольного управления; !сх -передаточный коэффициент по отклонению колонки штурвала, показывающий, на какой угол должен отклониться руль
высоты при перемещении пилотом колонки штурвала от балансировочного положения на 1 мм; Ахв-отклонение пилотом колонки штурвала.
211
ДПУ
мз
;
Рис. 7.5. Функциональная схема аналогового автомата продольного управления
Обычно автомат продольного управления объединяется демпфером тангажа или автоматом продольной устойчивости. Тогда их совместные законы
управления имеют следующий вид:
= ки
= к со,
Дхв
(7.10)
(7.11)
Последовательное включение исполнительного устройства автомата
в механическую проводку бустерной или электродистанционной системы
управления рулем высоты позволяет суммировать отклонения руля высоты
пилотом и автоматом.
Рассмотрим функциональную схему аналогового автомата продольного
управления, включенного в бустерную систему управления (рис. 7.5). В состав автомата входят датчик угловой скорости тангажа ДУС, датчик
линейных ускорений ДЛУ, датчик положения колонки штурвала ДП,
вычислитель В и сервопривод руля высоты С778В. Вычислитель и электронная часть сервопривода образуют электронный блок автомата БА в канале
руля высоты.
Автомат продольного управления работает следующим образом. При
отклонении пилотом колонки штурвала КШ датчик ДП вырабатывает
электрический сигнал и Д х , пропорциональный Лх„. Этот сигнал преобразуется в вычислителе В согласно закону управления (7.11) в сигнал и0>,
который вызывает отработку сервоприводом руля высоты. Полное отклонение руля высоты Д5В равно А8§ + А5вкПУ.
Отклонение руля высоты вызовет появление управляющего аэродинамического момента М28>, который изменит угловую скорость тангажа юг
и избыточную нормальную перегрузку Дпу. Сигналы, пропорциональные
этим параметрам ищ и иДп поступят с датчиков ДУС и ДЛУ на вычислитель и вызовут уменьшение сигнала ив. Тогда сервопривод вернет шток
рулевого агрегата в нейтральное положение. В это время угловая скорость
тангажа сог и избыточная перегрузка Ап у примут новые установившиеся
значения, пропорциональные отклонению руля высоты пилотом с помощью колонки штурвала. При возвращении пилотом колонки штурвала
212
в балансировочное положение все процессы повторяются в обратном
порядке.
Влияние автоматов продольного управления на характеристики управляемости самолета. Автоматы демпфирования и устойчивости обладают одним общим недостатком -снижают эффективность ручного управления
самолетом, увеличивая градиенты перемещений (х^)дт и усилий (РЦ')ДТ на
колонке штурвала. Поэтому демпферная составляющая кга юг и составляющая перегрузки к п Дп у законов управления (7.10) и (7.11) вызывают тот же
эффект. Использование сигнала Ах в в АПУ приводит к увеличению значения коэффициента штурвала в силу того, что
А5В = А5> + А5*пу = к ш . в Ах в + кю ю2 + к Пу Ап у + к х Ах в =
= 14.вАхв + кт1сог + к„;Апу,
где к'ш.в = 1сш.в + )сх_.
Такое увеличение коэффициента штурвала компенсирует уменьшение
градиентов перемещения и усилий, так как
(ХВ')АПУ = г
<г
=
(хв*)Дт >
Таким образом, автомат продольного управления позволяет сохранить
статические характеристики продольной управляемости в заданных пределах.
Влияние автомата продольного управления на динамические характеристики видно из рис. 7.6. Демпферная часть закона управления автомата
обеспечивает уменьшение колебательности короткопериодического движения по угловой скорости тангажа, делая его почти апериодическим.
Составляющая закона управления АПУ, пропорциональная отклонению
колонки штурвала Ах в , обеспечивает равенство установившегося значения
Рис. 7.6. Переходные процессы в контуре угловой скорости тангажа при ступенчатом
отклонении руля высоты:
°- свободный самолет; б-при включенном автомате продольного управления
213
. |
Рис. 7.7. Структурная схема автомата продольного управления
угловой скорости (<в2)уст установившемуся значению угловой скорости без
применения автоматики. Тем самым сохраняется эффективность продольного управления.
Особенности законов управления автоматов продольного управления.
В аналоговых автоматах продольного управления получил распростране-;
ние закон управления
А5*пу = ки ш, + кХ1 (1 - ку Ах в .
(7.12)!
Передаточный коэффициент по отклонению колонки штурвала 1сх зави-;
сит от ее балансировочного положения следующим образом:
V'
^-х
в
-6ад-° +
Х
"'6ал
ч
где Дх в6ало -постоянное отклонение колонки штурвала, характерное для данного;
самолета; Дх в6ал -отклонение колонки штурвала из нейтрального положения в балансировочное; хв"зад-заданный для данного самолета градиент перемещения колонки штурвала на единицу нормальной перегрузки.
Величины Ах„.6ал 0 и \1'зш являются постоянными и реализуются в вычислителе в виде соответствующих опорных напряжений. Для измерения
отклонения колонки штурвала из нейтрального положения в балансировочное устанавливают .дополнительный датчик положения (ДП). Наиболее
просто сигнал, пропорциональный Ах„ 6ал, можно получить, измеряя отклонение штока механизма эффекта триммирования. Механизм используется
пилотом для снятия усилий с колонки штурвала и ее перемещения в балансировочное положение. Тогда в функциональной схеме рис. 7.5 появляется
еще один ДП с электрическим выходом и Дх>бая .
Автомат с законом управления (7.12) позволяет сохранить постоянство
статических характеристик продольной управляемости самолета в различных режимах полета. Так обеспечивается улучшение продольной устойчивости и управляемости с помощью системы САУ-154 (рис. 7.7).
Пример 7.1. Рассчитаем характеристики управляемости самолета с автоматом
продольного управления, имеющим закон управления (7.12) для исходных данных
примеров 3.1, 3.2 и 6.1.
214
В
х
начале
Дх
полета
х
Ах„.6ал = А5„.6ал/1сш в = - 90 мм,
= (Д „.бал.о + „.бш,)/ влад = - °'
915
>
г
Д
е
Дх
где
Д5В 6ал = - 8°,
в.бал.о = - 20 мм,
х"
у
зад
к^ =
= 120 мм,
(Х"ОАПУ = ОцХ/О - Ч) = - 145 мм' <РВ")АПУ = (Х^АПУ?*' + Р0 = 214 Н.
В конце полета Дб,,.^ = - 8°, Ах в6ал . 0 = - 20 мм, (ХВ')АПУ = - 126 мм,
(Рвп>)дпу = 191 Н.
Таким образом, автомат продольного управления существенно снизил
разброс значений характеристик управляемости по режимам полета, сделав
их практически постоянными. Так, градиент перемещения колонки штурвала теперь меняется от —145мм в начале полета до —126мм в конце
полета, а градиент усилий на колонке штурвала меняется от 214 Н в начале
полета до 191 Н в конце полета, что практически незаметно для пилота.
Влияние отказов автомата продольного управления на управление продольным движением. Пассивный отказ автомата продольного управления
по сигналу Ах в приводит к прекращению отработки руля высоты через
контур автоматического управления при воздействии пилота на колонку
штурвала. Эффективность продольного управления самолетом падает,
градиенты перемещений и усилий на колонке штурвала возрастают.
Полный пассивный отказ автомата, комплексированного с демпфером
тангажа, приводит к снижению эффективности демпфирования продольных
короткопериодических колебаний и возрастанию эффективности продольного управления.
Активный отказ автомата продольного управления аналогичен активному отказу демпфера тангажа и сопровождается отработкой штока
рулевого агрегата на максимальный ход, ограниченный концевыми выключателями. Ограничение хода штока рулевого агрегата АПУ сказывается на
эффективности продольного управления, особенно при вертикальном маневре, когда часть рабочей зоны отклонения руля высоты расходуется
демпферной составляющей автомата.
Цнфроаналоговые автоматы продольного управления. Ужесточение требований к характеристикам продольной устойчивости и управляемости
самолета и, как следствие, усложнение законов управления АПУ привели
к необходимости реализации автоматов на цифроаналоговой схемотехнике.
В состав автомата входят датчики положения колонки штурвала ДП,
угловой скорости тангажа ДУС и нормальной перегрузки ДЛУ, аналоговый блок управления БУ, цифровой вычислительный блок устойчивости
и управляемости БВУУ и рулевой агрегат высоты РАЬЬ (рис. 7.8).
Формирование закона управления осуществляется одновременно в аналоговом вычислителе Б блока управления БУ и цифровом вычислителе
БВУУ. При этом аналоговый закон управления реализует функции автомата продольной устойчивости по сигналам нормальной перегрузки и угловой скорости тангажа.
Цифровой закон управления выполняет собственно функции АПУ по
сигналам отклонения колонки штурвала, а также сигналам и разовым
командам от смежных систем и датчиков. Сигналы с датчиков ДП, ДУС
и ДЛУ- напряжения постоянного и переменного тока иДх>, иИ1 и иДп . Часть
215
Рис. 7.8. Функциональная схема цифроаналогового автомата продольного управления АСУУ-96
сигналов со смежных датчиков также имеет аналоговую форму. Ряд
сигналов со смежных систем поступает в виде последовательного биполярного кода. Разовые команды подаются в виде напряжения постоянного
тока 27 В.
Аналоговые сигналы и разовые команды преобразуются в БВУУ
к цифровому виду. Управляющее воздействие формируется в цифровом
виде с последующим преобразованием в аналоговый сигнал и а ». Этот
сигнал подается в блок управления, где суммируется с управляющим
сигналом ист. аналогового контура. Сервопривод АПУ СП5В формирует
отклонение руля высоты А5^ПУ. В случае отказа цифрового контура
продолжает работать аналоговый контур с сохранением основных функций
демпфирования колебаний самолета по тангажу и устранения избыточной
перегрузки.
Управляющее воздействие АПУ А8в пу суммируется с управляющим
воздействием ручного контура А5В электродистанционной системы управления по усилию на колонке штурвала.
В обобщенном видб закон управления такого АПУ выглядит следующим образом:
(7.13)
216
= РЗ*^ (Аа, М) [а - а0 (М)] ,
АНУПС=
СТ
Составляющая закона управления по угловой скорости тангажа а™"
обеспечивает демпфирование колебаний самолета по тангажу. Составляющая закона управления по избыточной нормальной перегрузке аЛп> улучшает продольную устойчивость самолета. Составляющая закона управления по отклонению колонки штурвала а**' улучшает продольную управляемость самолета, причем передаточный коэффициент 1сх корректируется
по углу отклонения стабилизатора ф, а сигнал Дх„ пропускается через
апериодический фильтр с постоянной времени Тх .
Составляющая закона управления по приращению угла атаки аЛа обеспечивает улучшение продольной устойчивости и ограничение угла атаки
при убранных закрылках. Требуемое значение угла атаки а0 корректируется
по числу М. Передаточный коэффициент корректируется по разности
Да = а — а0 и числу М.
Составляющая закона управления ст" обеспечивает ограничение скорости полета самолета путем дополнительного отклонения руля высоты
при изменении числа М при убранных закрылках.
При включении автомата непосредственного управления подъемной
силой (АНУПС) формируется составляющая закона управления аАНУПС,
которая корректируется по отклонению колонки штурвала, избыточной
перегрузке, приращению угла атаки и управляющему воздействию вычислительной системы управления полетом.
Назначение и особенности формирования этой составляющей будут
рассмотрены в гл. 8.
При включении системы активного демпфирования (САД) формируется
составляющая закона управления а^Д, которая корректируется по избыточной нормальной перегрузке. Назначение и особенности формирования этой составляющей будут рассмотрены в гл. 8.
Так обеспечивается улучшение устойчивости и управляемости продольного движения с помощью системы АСУУ-96 (рис. 7.9).
Распространен также вариант реализации цифроаналогового АПУ
(рис. 7.10) без суммирования управляющих воздействий аналогового и цифрового контуров.
Отличие этой схемы заключается в том, что основным контуром
управления является цифровой. Аналоговый автоматический контур, а
также ручной контуры подключаются к сервоприводу электродистанционной системы управления только при отказе цифрового контура. Контроль
и коммутация производятся в аналоговых блоках управления и контроля
(БУК).
217
Рис. 7.9. Структурная схема цифроаналогового автомата продольного управления
АСУУ-96
Сигналы
от сменных
систем и
датчиков
'.
Отказ цифрового контура
Рис. 7.10. Функциональная схема цифроаналогового автомата продольного управления АСШУ-204
218
Г /7/7 1
ш^_
,0)
к
7
*"*'
бв
1
*|^ — |У ^^~^ г-^— |
У„Р
V
ля
*у
Х>^1
•шНК"
*^
1
Ш
1
ЪиР* 1
Г
1
[/?да_р- Та,р+
б
«| /<
4
,Ш1)
е.Г,
*
»<2) > **">ы
'
^
я^
р^
.,
»(^ »1^ом)
^Гл- /V 11>чр
1/7 -1
>Л) >
/?Х/7У
&0 1
1
* 1 1шг(У*1 \
1
Т
Ти>,р+1
,1 гг 1
'1 '"> 1
Гвй-^Г
1
, ПГП
5/?УУ
>
1±^ г— -| № Л А &«
'^Цр-,^
'5р
"[^Щ
5у
а б ал/=,
'
:
>
»^
\.
>
СТу
1/5(0
>•
б
1
вы"
1
,
ад|-$4
4Х»
|_///' |
и*
йа
ова
^«№«]
ид/ия | _Г
М
IV»'
;
I
ХМРЗ
а
да/г
^н^
те. 7.11. Структурная схема цифроаналогового автомата про^ ольного управления
СШУ-204
В обобщенном виде закон управления такого А!1У выглядит следую(им образом:
о>г
Дп
Дхв
ст, = ства + ства + ства ,
а
АХВ |
"ВЦ
'
ц
^-*В
ю
г
и
^а _|_
ВЦ '
П
У _!.
ВЦ '
^п*
и
^
ч>1гР "^
Юг
_1„
ВЦ "Т"
^х»
А
^
ВЬ
1
; Х А>^..
,)У'
К,
^Лп,
"
'
(Ш.О)Г
1
1
,
1
Т
А^
Тфр + 1 Пд П у р +, 11
Т ~
„
С
(7.14)
У*
1-
*ва*
•>
зад
с
г
Да
Г Ц
"
^„(5,ак)
ТФР + !
ц
а
д
}]
а
°
219
<С = кф (ф - Фзад) + -РФ(Ахв, а, а>2, п у ) ,
Ап уф =
Т
пу-
Так обеспечивается улучшение устойчивости и управляемости с помощью системы АСШУ-204 (рис. 7.11).
7.2.2. Моделирование улучшения продольной устойчивости
и управляемости
Реакция самолета на управляющие воздействия пилота при включенном
автомате продольного управления. Рассмотрим модель продольного короткопериодического движения самолета по угловой скорости тангажа, углам
тангажа и атаки (3.19) при наличии управляющих воздействий пилота на
колонку штурвала и включенном автомате продольного управления. Мо-;
дель содержит уравнения состояния, выхода и входа, закон управления
рулем высоты ручного контура и закон управления простейшего автомата
продольного управления (7.9):
Упк(1) = хт(1),
(7.16*
(7.17}
(7.18*
(7.19)
ш„а
где хм(1) =
Аа(1)
а,шг
а,а
О
АЭ(0
'
220
а
°пк
= ){
шь.
°п"У = 1
х, •
Подставим уравнения выхода (7.16) и входа (7.17), а также законы
управления (7.18) и (7.19) в уравнение состояния (7.15) и выполним
преобразование Лапласа при нулевых начальных условиях:
(р! - А п к ) У пк (р) = Впк рпк + В^пу) АХ В (р) .
Получим вектор передаточных функций самолета в продольном короткопериодическом движении самолета по угловой скорости тангажа, углам
атаки и тангажа на отклонение пилотом колонки штурвала при включенном автомате продольного управления:
АПУ/Ч _
У
шДР) _ ,
— ... , V —
у
.
ч-1пу
,
пк
'
фАПУ ( \ т ,1-чр
Ч'пк
и
^Р/ пк ^'--'пк
Переходная матрица состояния продольного короткопериодического
движения самолета при включенном автомате продольного управления
Фп" У (р) = (р1-А п к )~ 1 .
(7.20)
Сравнивая выражение (7.20) с выражением для переходной матрицы
состояния продольного короткопериодического движения самолета без
автоматики (3.84), приходим к выводу об их идентичности. Это существенно упрощает дальнейшие преобразования, приводящие к следующему виду
передаточных функций:
(кш.в + 1с х )к^(Т9 Р +1)
<™(Р) = - - : - ,
Т р 2 + 2Та^ар + 1
(кш.в + к х ) ка"
д„
д*' (р) = - - = - ,
2
Т^р + 2Та^ар + 1
(7.21)
(7.22)
(7.23)
Сравнивая передаточные функции (7.21) -(7.23) с передаточными функциями самолета без автоматики, приведенными в табл. 3.1, приходим
к выводу, что их структура не изменилась. Специфика включения автомата
продольного управления с законом управления (7.9) проявляется лишь
в изменении коэффициентов усиления,
Проведем аналогичные исследования, если автомат продольной управляемости имеет закон управления (7.10). Тогда в модели (7. 15) -(7. 19)
вместо (7.19) получим
У
пу
(г) = О^Л У пк (I) + В^ Ах„ ,
(7.24)
221
Вектор передаточных функций имеет вид:
у
уулпу/(Рч = ^М = <п!_А
-В
*- ' АХ в (р) «* А» Вп*
Вупк /1ЛР
\"пк
_|_ ГъАПУч
"т~ ^пк
)
|}АПУ\- ]
ЛъАПУ /-Л оу /т\р
^пк
\Р/ ^*пк (Л^пк
цАПУч
"ПК
>•>
где Ф*ПУ(Р) = (р! - Ам - В>;к - ВИЯ*)'1 = (Ф(Р)Г1 •
Переходная матрица состояния
где ФП"У(Р)}ПР-присоединенная матрица.
Определитель имеет вид
р _ ^^ _ „^Ч -а^-а^^ЦС 0
-аа(Вг
"р-С " " °
0
Р
~Чъ
= р [р2 + 2п*пур + Кпу)2] = А АПУ (р).
Коэффициент демпфирования и частота продольных короткопериодических колебаний самолета при включенном автомате продольного управления имеют вид:
П
АПУ= _ _ (ащ
-
Кг
+
-
^+ а 5 к ш ) =
-
к
г
(сок ) = а^^а^,, — а^^а^а + аааа
- аа,шЛАЦп С = Мак, + Й^ж + М^(к
Тогда матрица переходных функций состояния
А(р)
222
-аэ ю„ а„
А(р) 'а
\_
Р
а вектор передаточных функций самолета
Д(Р)
р .
Л(Р)
А(Р) (
С учетом новых обозначений получим:
„АПУ
(7.25)
„АПУ
(7.26)
„АПУ
+
(7.27)
2 2
(ТГ>Р
_АПУ
где Та
„АПУ
, <;„
, ,
,
-время и относительный коэффициент демпфирования продольных
5
АПУ
в
короткопериодических колебаний самолета с включенным АПУ; 1ст
коэффициенты усиления самолета с включенным АПУ.
в
, 1с„
Эти характеристики определяют следующим образом:
(Т
1
АПУ )2 =
а
а
«цо тв8. га,
(7.28)
Г
АПУ
"~ аа,<огаш,ай,
V аео2,ш2аа,а ~ аа,югаш„а
+М
+Р +
+
(7.29)
223
5
5. + м°: +. р« + м к- (^ + ц
Ч^л,"
а
и2,<о,аа,а ~
Пс -(ю,• 1Аш.в
т 1с
*Ч /1
'
АПУ
Х
к»"
=
качкш.„ + к х )
:—.
,
(7-31)
(7.32)
Анализ передаточных функций показывает, что АПУ не влияет на их
структуру, но изменяет характеристики образующих звеньев. Выбором
передаточных коэффициентов 1ст и кп удается обеспечить требуемые
значения времени, относительного коэффициента затухания и частоты
продольных короткопериодических колебаний. Выбором передаточного
коэффициента кх удается сохранить требуемые коэффициенты усиления
самолета и снизить негативное воздействие на эффективность продольного
управления демпферной составляющей и составляющей перегрузки закона
управления (рис. 7.12).
\
Маневры самолета в продольной плоскости осуществляются пилотом
энергичным отклонением колонки штурвала. На этапе короткопериодического движения происходит формирование новых значений угловой
скорости тангажа, утла атаки и нормальной перегрузки:
(Асог)уст = Шп
,
Аа уст = Шп [ Л х * - ( р ) ] =
(Апуа)уст = 11т
р->0
224
Рис. 7.12. Структурная схема замкнутой системы «самолет -автомат продольного
управления»
При кх = кш"г(кш + кп к°") установившиеся значения параметров короткопериоди'ческого движения самолета с включенным АПУ равны значениям этих параметров без автоматики, т. е. АПУ сохраняет эффективность
продольного управления, компенсируя недостатки демпфера тангажа и
автомата продольной устойчивости.
Реакция самолета на ступенчатое отклонение колонки штурвала
Дхв(1) = 1(1) Ах в , изображение которого по Лапласу Ахв(р) = АХв/р, описывается следующими переходными функциями:
АПУ
Х
Ах д
Ч СГвР+1)
Ашг(р) = -^^(р)
АПУ. АПУ
С(Т„
„АПУ
/ \
V
у
- в .
(р) = • —
'
(ТеР+ 1)
0
Перейдем от изображения Ап (р) к оригиналу:
V0
Х
АПУ Г
Ап ..<Р) = Р,ЛЬ |_1Т
/
\
т^И 1 О п
I
,
1
§
АПУ
-I
_АПУ"
х е
(7.33)
Выражение (7.33) определяет переходный процесс в продольном короткопериодическом колебательном движении самолета при отклонении
пилотом колонки штурвала и включенном автомате продольного управления.
83ак.948
225
7.3. АВТОМАТИЧЕСКОЕ УЛУЧШЕНИЕ БОКОВОЙ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ
7.3.1 . Автоматы бокового управления
Устройство и работа. Демпферы крена и рыскания, автоматы боковой
устойчивости снижают эффективность путевого и поперечного управления.
Пилоту приходится компенсировать эти недостатки дополнительным воздействием на штурвал и педали. Автоматы бокового управления служат
для освобождения пилота от решения этой задачи.
Автоматы бокового управления (АБУ)- ере детва автоматического
управления, обеспечивающие улучшение путевой управляемости самолета,
на всех этапах и во всех режимах полета путем отклонения руля направления при воздействии пилота на педали или улучшение поперечной
управляемости самолета отклонением элеронов при воздействии пилота на
штурвал.
Простейшие автоматы бокового управления реализуют следующие
законы управления рулем направления и элеронами:
к Х и Дх н ,
(7.34)
дХэ,
(7.35)
К)1>
где Д5^БУ, Д8^БУ- автоматические отклонения от балансировочного положения соответственно руля направления и элеронов автоматом бокового управления; 1сх , к х -передаточные коэффициенты соответственно по отклонению педалей
и штурвала, показывающие, на какой угол должны отклоняться руль направления
или элероны при перемещении пилотом педалей или штурвала на 1 мм.
Обычно автоматы бокового управления объединяются с демпферами
рыскания и крена. Тогда их совместные законы управления имеют следующий вид:
о> + к Х Д х н ,
(7.36)
кИ1о,х + к Х э Д х э .
(7.37)
Последовательное -включение исполнительного устройства автомата
в механическую проводку бустерной или электродистанцйонной системы
управления рулем направления или элеронов позволяет суммировать
отклонения руля пилотом и автоматом.
В состав аналогового автомата бокового управления (рис. 7.13) входят
датчик угловой скорости рыскания ДУС, датчик положения педалей ЦП,
вычислитель В и сервопривод руля направления. Вычислитель и электронная часть сервопривода образуют электронный блок автомата Б А в канале
руля направления. Принцип работы автомата бокового управления аналогичен принципу работы автомата продольного управления.
Влияние автоматов бокового управления на характеристики управляемости самолета. Демпферные составляющие в законах управления
автоматов бокового управления, как это было показано в предыдущей
226
главе, снижают эффективность путевого и поперечного управления, увеличивая градиенты перемещений и усилий на педалях и баранке штурвала.
Дополнительное отклонение автоматом руля направления или элеронов
при воздействии пилота на педали или штурвал приводит к увеличению
коэффициентов штурвала в силу того, что
=к
= кш.эДх
= к ш э Ах э
А8 Э = А5?
где 1
к х _Ах н = к ш н А х н
= к ш н Лх„
А5 Н = А5Е +
+
м
; 1с'ш.э = 1сш.э 4-
Такое увеличение коэффициентов штурвала компенсирует снижение
демпферами градиентов перемещений и усилий, так как
1с-
1с
III.Н
*
Т>ХН
^.
*Н
^- «
[.Н
Ш.Н
Я
Т>Х1
* Н
^Ш.Н
_5т_
5т
^•Ш.э
Ш.Э
где (х§) АБУ , (РН)ДБУ ' ( Х Э)АБУ> (Рэ)дБу-хаРактеРистики боковой управляемости
самолета с включенным автоматом бокового управления; (х^)др, (РЦ)д Р , (х|)дк,
(Р|)дк-характеристики боковой управляемости самолета с включенными демпферами рыскания и крена.
пи г
ДзС
*
ЛП
> Д11
1/й)у
в
идхн
с.'А
д\
> г
Г*
Г
\
«дс
спзн
и
У
^
им
*>
ИМ
-,,-:
лпг У|
РА8н
Ч
я
^<
^
мз
1шо=
(
.«леи
АЬН
48
"^/С
Рис. 7.13. Функциональная схема аналогового автомата бокового управления
Таким образом, автомат бокового управления позволяет сохранить
статические характеристики боковой управляемости в заданных пределах
(рис. 7.14).
Демпферные части законов управления автоматов обеспечивают почти
апериодический характер переходных процессов по угловым скоростям
крена и рыскания. Составляющие управляемости законов управления АБУ,
пропорциональные отклонению баранки штурвала Ах э и педалей Ах н ,
обеспечивают равенство установившихся значений угловых скоростей
ш х у с т и ю у у с т значениям этих параметров без применения автоматики.
Тем самым сохраняется эффективность поперечного и путевого управления.
Выпуск интерцепторов на полукрыле с отклоненными вверх элеронами
увеличивает эффективность поперечного управления, так как создает дополнительный управляющий аэродинамический момент крена М Х 5 и .
Кроме того, канал управления интерцепторами является резервным при
отказе канала управления элеронами и обеспечивает отказоустойчивость
поперечного управления.
Цифроаналоговые автоматы бокового управления. Дальнейшее совершенствование АБУ стало возможным с применением цифроаналоговой
схемотехники.
В состав автомата (рис. 7.15) входят датчики положения штурвала ДП,
два датчика угловой скорости рыскания и угловой скорости крена ДУС,
аналоговый блок управления БУ, цифровой вычислительный блок устойчивости и управляемости БВУУ и сервопривод руля направления.
Формирование закона управления осуществляется в аналоговом контуре по сигналам угловых скоростей рыскания и крена (аналоговый
демпфер рыскания) и в цифровом контуре по сигналам положения баранки
штурвала, а также смежных систем и датчиков. Цифровой управляющий
сигнал стЦ приводится к аналоговому виду и а „ и суммируется в блоке
БУ с аналоговым управляющим сигналом и а .. Управляющее воздействие
БУ
А§^ формируется сервоприводом АБУ и суммируется с управляющим
воздействием ручного контура А8^ электродистанционной системы управления по усилию на педалях.
6)ш,,
Рис. 7.14. Переходные процессы в контуре угловой скорости крена и угла крена при
ступенчатом отклонении элеронов:
а-свободный самолет; б- при включенном автомате бокового управления
228
Рис. 7.15. Функциональная схема цифроаналогового автомата бокового
управления АСУУ-96
В обобщенном виде закон управления такого АБУ выглядит следующим образом:
Ш
ш
У
«V =
(7.38)
Тт.Р
Ах.
ТХэР+1
Составляющая закона управления по угловой скорости рыскания
а™" обеспечивает демпфирование колебаний самолета по рысканию. Изодромный фильтр с постоянной времени Т йу устраняет противодействие
АБУ развороту самолета с постоянной угловой скоростью рыскания.
Составляющая закона управления по угловой скорости крена ст„"
обеспечивает демпфирование и улучшение устойчивости самолета по углу
скольжения. Апериодический фильтр с постоянной времени Т й х служит для
фильтрации помех, содержащихся в сигнале с ДУС. При выпуске закрылков
увеличивается передаточный коэффициент к ш .
Д]Ц
Составляющая закона управления по отклонению штурвала стн 3
обеспечивает требуемые характеристики боковой управляемости. Апериодический фильтр с постоянной времени Т х служит для фильтрации помех,
содержащихся в сигнале с ДП. Передаточный коэффициент к х ^корректируется при выпуске закрылков и при работе вычислительной системы
управления полетом ВСУП в режиме совмещенного управления (рис. 7.16).
Так обеспечивается улучшение устойчивости и управляемости бокового
движения с помощью системы АСУУ-96.
В цифроаналоговом АБУ, включенном в электродистанционные
системы управления элеронов и интерцепторов (рис. 7.17), реализуется
логика раздельного формирования управляющих сигналов в аналоговом
229
и цифровом контурах. Основным контуром управления является цифровой.
При его отказе происходит автоматическое переключение на аналоговый
автоматический контур управления элеронами и отключение управления
интерцепторами.
В обобщенном виде закон управления такого АБУ следующий:
; = а"' + а * ' + а + а- +
Дх
а эц ' = к Х е Р Х з (Дх э )
Т, Р + 1
бал__р
/у
стВСУПл
й
эц
•» бал V бал > °э.6ал ) •>
Тх,Р+1
Ахэ,
АКАБУ _
^°т
~
Ду+,
нц
сст
т
а А ц т = к у Р Д у (г),
Д",
иц >
СТ
(7.39)
4у _
иц —
а а
хДАх э ,5 закр ) + Рторм(ШО, 6 руд ),
Тш.р+1
Составляющие закона управления по угловой скорости крена в аналоговом и цифровом контурах ст^" и ст™ц обеспечивают демпфирование
колебаний самолета по крену. Апериодический фильтр с постоянной
времени Т ш , расположенный в ДУС, служит для фильтрации высокочастотной помехи.
Рис. 7.16. Структурная схема цифроаналогового автомата бокового управления
АСУУ-96
230
Сигналы .
от смежных
систем и
датчиков
Рис. 7.17. Функциональная схема цифроаналогового автомата бокового управления
АСШУ-204
Составляющие закона управления по боковому отклонению миништурвала а э ц а обеспечивают требуемые характеристики боковой управляемости. Апериодический фильтр с постоянной времени Т х служит для
фильтрации помех, содержащихся в сигнале Ах э . Нелинейное звено имеет
зону нечувствительности при малом изменении сигнала Ах э .
Составляющая а^ ограничивает угол крена. Нелинейное звено Р Д у
имеет зону нечувствительности в эксплуатационном диапазоне угла крена
и линейно возрастает до утла крена, выходящего из эксплуатационного
диапазона.
Составляющая закона управления ст,™ обеспечивает автоматическую
балансировку самолета по крену по сигналу вычислительной системы
Рис. 7.18. Структурная схема цифроаналогового автомата бокового управления
АСШУ-204
231
У п
управления полетом а?.б л при появлении статической ошибки управления.
В ручном режиме управления балансировкой пилот воздействует на кнопку
управления балансировкой элеронов и формирует сигнал и,^, который
определяет вид нелинейного звена Р 6 а л . Балансировочный сигнал пропускается через интегрирующее звено.
Закон управления АБУ в канале интерцепторов формируется пропорционально отклонению миништурвала, закрылков, углу крена. При касании
самолета взлетно-посадочной полосы по сигналам обжатия шасси и установки рычагов управления двигателями в положение реверса производится
довыпуск интерцепторов с целью торможения самолета.
Улучшение устойчивости и управляемости бокового движения с помощью системы АСШУ-204 обеспечивается АБУ (рис. 7.18).
7.3.2. Моделирование улучшения боковой устойчивости
и управляемости
Реакция самолета на отклонение штурвала пилотом при включенном
автомате бокового управления в канале элеронов. Рассмотрим модель
быстрого бокового движения самолета по угловой скорости и углу крена
(4.53) при наличии управляющих воздействий пилота на штурвал и включенном автомате бокового управления. Модель содержит уравнение состояния, уравнения выхода и входа, закон управления элеронами ручного
контура и закон управления автомата бокового управления (7.37):
Хб6
(I) = А 66 х66 (I) + В^6 ч^6 (г),
:
(7.40)
Х 6 б (1),
0 + Д6
АБУ
(7.41)
(1),,
(7.42)
Д5АБУ(1) = ВЙР,уу„(1) + ВбА6БУДхэ(1),
где х^(1) = \
V
О 66 —
— К
р
ш
.э>
Дшх(1)~|
\,
(I) ^
А 66 =
Га т
01
1ау>щ
0^
"' ш"
,
В^ =
Га щ 8 1
I
" '
0 _|
(7.44)
,
„АБУ
О^ =
Г14»
I О
Г»АБУ — \г
'-'бб
— КХ) .
Подставим уравнения выхода (7.41) и входа (7.42) и законы управления
(7.43) и (7.44) в уравнение состояния (7.40) и выполним преобразование
Лапласа при нулевых начальных условиях:
(Р1 - А 66 - В^6В^у)Уб6(р) = ВиВ6р6 + В 6 А 6 БУ )Ах э (р).
Получим вектор передаточных функций системы «самолет-автомат
бокового управления» в быстром боковом движении самолета по угловой
скорости и углу крена на отклонение пилотом штурвала:
232
У
у
= ФЙР (р) В&6 (Щ6 + 0$р ) .
(7.45)
Переходная матрица состояния быстрого бокового движения самолета
при включенном автомате бокового управления
_ /_.т
Ф АБУ/-Ч
бб Ф; — Ф
1
_ Ад
_ ОПУ1 Г) АБУ ^~ 1
бб
бб *'бб1 )
Решение уравнения (7.45) приводит к следующему виду передаточных
функций:
(7.46)
„АБУ
Т
<°, Р +
А1
х
к"»
•*-(Л
(7.47)
Р[<
э
(К ш з
ЕУ
р+1]
сДК
где к^
АБУ
,Т
'Г
ДК
1+
Таким образом, автомат бокового управления в канале элеронов увеличивает коэффициент усиления самолета по угловой скорости крена по
сравнению с демпфером крена. Постоянная времени Т ш
при этом не
меняется. Структурная схема замкнутой системы «само лет-автомат бокового управления» в канале элеронов (рис. 7.19) включает автоматический
и ручной контуры.
На этапе быстрого бокового движения по крену при ступенчатом
отклонении штурвала произойдет формирование нового установившегося
значения угловой скорости крена
(Аих)уст = Нт [ Дхэ V/ д^ (р) ] =
р-0
I
При к х = Кщ^ установившееся значение угловой скорости крена самолета с включенным АБУ будет равно значению этого параметра без
Рис. 7.19. Структурная схема замкнутой системы «самолет - автомат бокового управления»:
а-в канале элеронов; 6-9 канале рулей направления
233
автоматики, т.е. АБУ сохраняет эффективность поперечного управления,
компенсируя недостатки демпфера крена.
Переходный процесс по угловой скорости крена определяется следующим выражением:
к и (к щ э + кхх))г
1
-
1
БУ
Время переходного процесса 1* не отличается от времени переходного
к
процесса ^% .
Реакция самолета на отклонение педалей пилотом. Рассмотрим модель
быстрого бокового движения самолета по угловой скорости рыскания
и углу скольжения (4.23) при наличии управляющих воздействий пилота на
педали и включенном автомате бокового управления. Модель содержит
уравнение состояния, уравнения выхода и входа, закон управления рулем
направления ручного контура и закон управления автомата бокового
управления (7.34):
Хбб(1) = Аб6хбб(1) + В^и^в(1),
(1) = Хб6(1),
(7.48)
(7.49)
Убб
(7.50)
(7.51)
(7.52)
ГДю у
где
!
^
А
Г ">,.»>,
. А 66= яа
Ь Р,«,
Преобразование модели (7.48)-(7.52) приводит к получению передаточных функций самолета в быстром боковом движении самолета по
угловой скорости рыскания и углу скольжения на отклонение пилотом
педалей при включенном автомате бокового управления:
(р! - А и ) У66(р) = В>6(0?6 + В4
У
-
1
Р
БУ
Переходная матрица состояния быстрого бокового движения самолета
при включенном автомате бокового управления
Ф^БУ(р) = (р!-А 6 6 )- 1 .
(7.53)
Сравнив выражение (7.53) с выражением для переходной матрицы
состояния быстрого бокового движения самолета без автоматики, при234
ходим к выводу об их идентичности. Это позволяет получить передаточные
функции в следующем виде:
...
д
(р)
=
,
14" (*,,„ + Ч)
—— -
.
(7.54)
(7.55)
Сравнивая передаточные функции (7.54) и (7.55) с передаточными
функциями самолета без автоматики в быстром боковом движении, приведенными в табл. 4.1, приходим к выводу о том, что их структура не
изменилась. Включение автомата бокового управления с законом управления (7.34) изменяет лишь коэффициент усиления.
Проведем аналогичные исследования, если автомат бокового управления имеет закон управления (7.36). Тогда в модели (7.48)~(7.52) вместо
закона управления (7.52) используем следующее уравнение:
(7.56)
[В^у]т = [к Щу 0].
Получим вектор передаточных функций в следующем виде:
= (р! - А66 -
Матрица переходных функций
БУ
У
1
Ф& (Р) = (р! - А„ - ВЬО& ) - .
(7.57)
Сравнивая выражение (7.57) с выражением для переходной матрицы
состояния быстрого бокового движения самолета при включенном демпфере рыскания, приходим к выводу, что ФввБУ(р) = Ф^(р). Это позволяет
воспользоваться результатами параграфа 6.2 и получить следующие передаточные функции:
+ 1)
(7.59)
235
,
8„,
где
кш«
=—
=к " н
, 1 8 »
1, 41сщ к "
У
5
8
,8
'
,
,
У
1с « =
1 , 5 ,
141сю к "
У
Р
-=
1 4- к„ ,Ь «,"
у
У
У
к "1с
=
8
С
Р
1 ? -)-
""
уАБУ _ уДР
еАБУ _ сДР
Таким образом, автомат бокового управления в канале руля направления увеличивает коэффициенты усиления самолета по угловой скорости
рыскания и углу скольжения по сравнению с демпфером рыскания. ПоАБУ
АБУ
стоянная времени Т
и относительный коэффициент затухания ^
при
этом не меняются. Структурная схема замкнутой системы «самолет-автомат бокового управления» в канале руля направления (см. рис. 7.19) содержит
ручной и автоматический контуры.
На этапе быстрого бокового движения по рысканию при ступенчатом
отклонении педалей произойдет формирование нового установившегося
значения угловой скорости рыскания
(Асоу уу)сустт = Нт
у
Р-О
1 4-К
1
~
^-Юу
К "
^Юу
При 1сх= = кга" установившееся значение угловой скорости рыскания
самолета с включенным АБУ будет равно значению этого параметра без
автоматики, т. е. АБУ сохраняет эффективность путевого управления, компенсируя недостаток демпфера рыскания.
Переходный процесс по угловой скорости рыскания определяется следующим выражением:
Аш т (р) =
^»(^ш.э + ^ х ) Г
8
4- КVщ ^ КVщ"^
II -I-
I-
у/11 —
—
Таким образом, включение автомата бокового управления в проводку
управления рулем направления приводит к уменьшению колебательности
процесса управления при сохранении эффективности путевого управления.
7.4. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ПРОДОЛЬНОГО
УПРАВЛЕНИЯ
Устройство и работа автоматов регулирования продольного управлений.
Характеристики продольной управляемости самолета существенно меняются по режимам полета. Особенно сильно они зависят от скорости
236
и высоты полета. При ручном управлении самолетом пилоту приходится
учитывать эти факторы, прикладывая различные усилия к колонке штурвала на различных режимах полета. На больших скоростях полета вследствие увеличения эффективности руля высоты эти усилия должны быть
незначительными. На малых скоростях полета вследствие уменьшения
эффективности руля высоты эти усилия возрастают. Автоматы регулирования продольного управления служат пилоту для облегчения управления
самолетом.
Автомат регулирования продольного управления (ЛРУ/сш„)- средство
автоматического управления, обеспечивающее постоянство статических
характеристик продольной управляемости самолета на всех этапах и во
всех режимах полета путем регулирования значения коэффициента штурвала руля высоты при изменении режима полета.
Автоматы регулирования продольного управления могут представлять
собой автономные средства с собственным сервоприводом, изменяющим
кинематику механической проводки управления рулем высоты. Возможно
также построение автомата на базе автомата продольной управляемости,
тогда собственного сервопривода автомат не имеет и кинематики механической проводки 'Не меняет.
Рассмотрим первый вариант АРУ. Основными параметрами, характеризующими изменение режима полета самолета, являются скоростной
напор я, приборная скорость Упр и высота полета Н. В аналоговых
автоматах регулирования продольного управления обычно реализуется
простейшая зависимость коэффициента штурвала к ш . в от приборной скорости
1сш.в = Ьш.в(Упр),
(7.60)
1~тах ^«т,
\7
<- утт
ш.в "Ри у п р ^ у п р
к
где к ш в (У п р ) =
, т„
(Ьтах _ итш \
К
*.Кш.в
ш.в)
^—— ^ ПР - V-") при V- « Упр ^ V-';
пр >
тах
\гтт
__.,. л л
-^ уш
К
ш.в ПРИ У п р > У П ]
Зависимость коэффициента штурвала кш.в от приборной скорости показана на рис. 7.20. На малых приборных скоростях полета вплоть до
значения У™" выдерживается максимальное значение коэффициента штура
вала Кш в- Затем следует участок линейного уменьшения коэффициента
штурвала до минимального значения 1с™в на скорости У™*. Это значение
коэффициента штурвала выдерживается на больших приборных скоростях
полета.
В состав автомата (рис. 7.21) входят система воздушных сигналов СВС
как датчик приборной скорости, вычислитель В и сервопривод коэффициента штурвала С/7кш в. Вычислитель и электронная часть сервопривода
образуют электронный аналоговый блок автомата БА в канале регулирования коэффициента штурвала рулей высоты. Исполнительным устройством сервопривода служит электромеханизм вращательного действия
237
МВД]ашя, который управляет кинематическим механизмом изменения
коэффициента штурвала руля высоты
/Шкш.в.
Автомат регулирования продольного управления работает следующим образом. На малых приборных
скоростях полета во взлетно-посадочных режимах, когда эффективность
отклонения руля высоты сравнительV,•IV
"IV
но мала, выходное звено электромеханизма находится в крайнем выдвиРис. 7.20. Зависимость 'коэффициента нутом положении, обеспечивая с поштурвала руля высоты от приборной мощью кинематического механизма
скорости
/ГЛ/Кщ в максимальное значение коэффициента штурвала руля высоты."
Это достигается соответствующим соотношением длины плеч в кинематической передаче от колонки штурвала КШ к механизму загрузки МЗ
и рулевому приводу руля высоты РП8В.
Максимальное значение коэффициента штурвала руля высоты сохраняется вплоть до определенной приборной скорости УЦр"1, при превышении
которой АРУ начинает отработку. Сигнал, пропорциональный приборной
скорости У п р , поступает в вычислитель, который проверяет выполнение
условия Упр ^ Уцр" и вырабатывает управляющий сигнал ив на вход
сервопривода, пропорциональный разности (Упр — УПР" ). Так как скорость
изменяется сравнительно медленно, отработка управляющего воздействия
осуществляется достаточно медленнодействующим электроприводом, влиянием которого на динамику управления можно пренебречь.
Когда сигнал обратной связи и0.с с датчика позиционной обратной связи
ДОС уравновесит на входе сумматора С сервопривода управляющий
сигнал и в , отработка прекратится. Выходное звено МВДкш.в займет новое
Рис. 7.21. Функциональная схема аналогового автомата регулирования продольного
управления, включенного в бустерную систему управления рулем высоты
238
положение, обеспечивая с помощью кинематического механизма ЛЖ1сш.а
меньшее плечо в кинематической проводке к рулевому приводу и соответственно меньшее значение коэффициента штурвала руля высоты. Руль
высоты и колонка штурвала при этом остаются неподвижными, а меняется
лишь кинематика механической проводки управления.
По мере увеличения приборной скорости до определенного значения
V™", когда эффективность отклонения руля высоты повышается, выходное
звено электромеханизма МбДкш.„ постепенно перемещается в крайнее
убранное положение, обеспечивая минимальное значение коэффициента
штурвала руля высоты. Дальнейшее увеличение скорости не вызывает
воздействий на кинематику проводки управления рулем высоты. Управление пилотом рулем высоты через контур ручного управления (сигнал
Д8?) и управление автоматикой через контур автоматического управления
(сигнал А8|) осуществляются обычным образом.
Разновидностью автомата регулирования продольного управления
с собственным сервоприводом, воздействующим на кинематику механической проводки, является автомат, осуществляющий регулирование коэффициента штурвала руля высоты в функции эквивалентного отклонения
руля высоты при горизонтальном полете Д8Г° • Это эквивалентное отклонение вычисляется как сумма угла отклонения стабилизатора Дф, приведенного к рулю высоты, и угла отклонения самого руля высоты Д8В от
положения горизонтального полета. Выделение значения эквивалентного
отклонения руля высоты, соответствующего горизонтальному полету, из
текущих значений Д5В и Дф осуществляется по информации об угловой
скорости тангажа. При сог = 0 (отсутствие маневра) Д8В и Дфст соответствуют горизонтальному полету.
Такой АРУ вместо датчика приборной скорости-системы воздушных
сигналов СВС- содержит датчик угловой скорости тангажа ДУС, датчик
положения стабилизатора ДЯф и датчик положения руля высоты ДЯ8„ (на
рис. 7.21 показаны штриховой линией). Выработка вычислителем управляющего сигнала ив производится в функции сигналов иШ1, идф и ида,. При
иШг / 0 (наличие маневра) выходное звено электропривода не воспроизводит изменения значений Д8В и Дф, вызывающих указанный маневр, а запоминает значения, предшествующие маневру. Запоминание осуществляется
с помощью функциональной ячейки вычислителя, которая, запирая прямой
тракт привода, останавливает выходное звено исполнительного механизма
при наличии угловой скорости тангажа «>г + 0. При иЩг = 0 любые изменения Д8В и Дф, а соответственно сигналов ида, и идф преобразуются
автоматом в пропорциональное этим изменениям перемещение выходного
звена исполнительного механизма и соответственное изменение коэффициента штурвала руля высоты.
Автомат регулирования продольного управления на базе автомата
продольного управления не воздействует на кинематику механической
проводки руля высоты. Этот автомат обеспечивает изменение передаточного коэффициента по отклонению колонки штурвала кх> автомата
239
Цсав!
Рис. 7.22. Зависимости скоростного напора от приборной скорости (а) и передаточного коэффициента по отклонению колонки штурвала от скоростного напора (б)
продольного управления в функции скоростного напора ц или приборной
скорости У п р . Тогда АПУ и АРУ реализуют следующий совместный закон
управления:
Д5вчПУ = к х ,( Ч )Дх в ,
(7.61)
:„„„ при \пр<\™;
где я = •{ ясо„81
V
ГГрИ
V
.
^ V п
при я < Я ;
,, тах
ь™" \
т!
I _ дтт)
, тт
кх
1
I - я ") при я" '" < я « Ч"
при
. тт , тах
-постоянные значения параметров и коэффиЧСОп81> Чт'". Чтах, У™р°' У р ' х
циентов, характерные для данного самолета.
Зависимости ^ — Г(Упр) и кх> = Г(я) имеют нелинейный вид (рис. 7.22).
Так как автомат продольного управления включается в механическую
проводку бустерной или электродистанционной системы управления по
последовательной схеме, то полное отклонение руля высоты пилотом
и автоматикой
А5В = А5' +
= [кш.в
= 1сш.вДхв + 1сх-(Ч)Дхв =
х = 1с^
где
Таким образом осуществляется регулирование коэффициента штурвала
руля высоты без изменения кинематики механической проводки.
В цифроаналоговых АРУ на базе АПУ все расчеты осуществляются
240
в цифровом вычислителе, а сервоприводом руля высоты служит сервопривод электродистационной системы управления.
Разновидностью автоматов регулирования продольного управления
является автомат регулирования продольной загрузки (АРЗ)- средство автоматического управления, обеспечивающее стабилизацию характеристик
продольной управляемости путем регулирования коэффициента усиления
проводки управления рулем высоты по усилию при изменении режима
полета.
При этом реализуется зависимость коэффициента 1с," от приборной
скорости либо скоростного напора и высоты:
<В = <-(У„Р).
(7.62)
Причем функция Кх"(У пр ) аналогична функции кш В(У„Р), представленной
(7.60).
Изменение коэффициента усиления проводки управления рулем высоты
по усилию ведется таким образом, чтобы градиент усилий на колонке
штурвала по перегрузке оставался постоянным. Это позволяет увеличить
загрузку управления для сохранения ощущения скорости полета по усилию
на колонке штурвала.
Функциональная схема АРЗ продольного управления отличается от
функциональной схемы АРУк ш . в , представленной на рис. 7.20, тем, что
электромеханизм МВД воздействует на кинематический механизм загружателя МЗ без изменения кинематики проводки управления от колонки
штурвала к рулевому приводу руля высоты. Работа АРЗ аналогична работе
АРУк ш . в .
Влияние автоматов регулирования продольного управления на характеристики управляемости самолета. Статические характеристики продольной
управляемости самолета -градиенты перемещения и усилий на колонкештурвала по перегрузке согласно (3.70) -(3.73) зависят от коэффициента
штурвала к ш . в , градиента усилий на штурвале по перемещению Р*" и градиента руля высоты по перегрузке §"". Величину, обратную градиенту 8°у,
называют коэффициентом усиления по перегрузке
Этот коэффициент показывает, какую нормальную перегрузку получит
самолет при отклонении руля высоты на 1°. Как показывают теоретические
и экспериментальные исследования, этот коэффициент меняется в зависимости от режимов полета следующим образом:
^а
'
т^,
(ХР-ХТ)1ГЩ
;
241
Подставив выражения (7.63) и (7.64) в выражения (3.70) и (3.73),
получим:
'"*"",
(7.65)
х
Р ;.
^ш.в^п'
(7.66)
^ш.втг"8Ь а Я
Таким образом, градиенты перемещений и усилий на колонке штурвала
по перегрузке прямо пропорциональны запасу устойчивости по перегрузке
(Хр — хт), а также массе самолета т и обратно пропорциональны производной коэффициента момента тангажа по отклонению руля высоты
тв' и скоростному напору я. Наиболее существенно в течение полета
меняется скоростной напор. Соответственно меняются и градиенты X"'
и Рв г . Это показано, в частности, в примере 2.
Для обеспечения постоянных значений этих градиентов необходимо
менять коэффициент штурвала 1сш в обратно пропорционально изменению
коэффициента усиления самолета по перегрузке к п ", а следовательно,
обратно пропорционально скоростному напору ц. Эту задачу и решает
автомат регулирования продольного управления. При этом обратно пропорциональная зависимость 1сш в = п — I аппроксимируется линейной зави\Я/
симостью (7.60), пересекающей параболу в точках цтп и ята* либо в точках
У™" и У™ р ах . Подставим в выражения (7.65) и (7.66) значение кш.в = -. Тогда
градиенты перемещения и усилий на колонке штурвала по перегрузке
перестают зависеть от скоростного напора.
Аналогичным образом можно показать благоприятное влияние автомата регулирования продольного управления на градиенты перемещения
и усилия на колонке штурвала по скорости х^ и Р,. Рассмотрим влияние
автомата регулирования продольной загрузки на статические характеристики продольной управляемости. Коэффициент усиления проводки
управления рулем высоты по усилию есть величина, обратная градиенту
усилий на колонке штурвала по перемещению Рв*. Тогда выражение (7.66)
можно представить следующим образом:
р%_
* п
—
1
Ьш.Дп*,
*._
рА
п
—
1
К Ш . В К*'К^
Г
Для обеспечения постоянного значения градиента РЦ по режимам
полета в связи с зависимостью к*' от скоростного напора ц необходимо
изменять коэффициент кх_' обратно пропорционально изменению скорост242
ного напора. Эту задачу решает автомат регулирования загрузки. При этом
коэффициент штурвала к:ш.в остается неизменным.
Влияние отказов и характеристик элементов автомата регулирования
продольного управления на управление продольным движением. Пассивный
отказ автомата приводит к прекращению регулирования коэффициента
штурвала руля высоты по режимам полета. Если такой отказ происходит
на взлетном режиме, то весь последующий полет пилот выполняет с большим значением коэффициента штурвала. Поэтому на больших скоростях
пилоту трудно соразмерить величину перемещения колонки штурвала
с реакцией самолета. Небольшие перемещения колонки штурвала создают
чрезмерно быстрое изменение перегрузки, что заставляет пилота отклонять
колонку штурвала в обратную сторону. При этом создается опасность
непроизвольной раскачки самолета.
Если пассивный отказ происходит в крейсерском режиме на большой
скорости, то весь последующий полет пилот выполняет с малым значением
коэффициента штурвала. Поэтому на малых скоростях при заходе на
посадку маневренные возможности самолета существенно ограничены.
Значительные перемещения колонки штурвала создают чрезмерно малое
изменение перегрузки, что затрудняет вывод самолета на посадочный угол
атаки и создается опасность грубой посадки. Поэтому обычно в АРУ
предусматривается возможность ручного управления изменением коэффициента штурвала до взлетно-посадочного значения 1с™" от аварийного
тумблера. При этом пилот переходит на непосредственное управление
исполнительным механизмом автомата, формируя постоянный управляющий сигнал на вход его сервопривода.
Активный отказ автомата приводит к отработке исполнительным механизмом кинематики механической проводки в одно из крайних положений.
Если такой отказ происходит на взлетном режиме, то резко ограничиваются маневренные возможности самолета и возникает опасность невыхода самолета на взлетный угол атаки.
Если отказ происходит в крейсерском режиме, возрастает опасность
раскачки самолета. Если отказ происходит при заходе на посадку, возникает опасность невыхода самолета на посадочный угол атаки. Поэтому
в исполнительном механизме АРУ устанавливаются концевые выключатели, обесточивающие автомат при значительных перемещениях выходного звена. Радикальным методом, обеспечивающим уменьшение влияния
автомата на безопасность полета, является резервирование.
7.5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ПУТЕВОГО
И ПОПЕРЕЧНОГО УПРАВЛЕНИЯ
Устройство и работа автоматов регулирования путевого и поперечного
управления. Характеристики боковой управляемости существенно зависят
от режимов полета. Возрастание эффективности управления самолетов от
Руля направления и элеронов на больших скоростях полета и уменьшение
эффективности управления на малых скоростях полета сильно затрудняют
243
пилоту процесс управления самолетом. Задача пилота существенно упрощается при наличии на борту самолета автоматов регулирования путевого
и поперечного управления.
Автомат регулирования путевого управления (АРУЬШ. „)-средство автоматического управления, обеспечивающее постоянство статических характеристик путевой управляемости путем регулирования значения коэффициента штурвала направления при изменении режима полета.
Автомат регулирования поперечного управления (АРУЬШЭ)-средство
автоматического управления, обеспечивающее постоянство статических
характеристик поперечной управляемости путем регулирования значения
коэффициента штурвала элеронов при изменении режима полета.
Принцип действия автоматов регулирования путевого и поперечного
управления аналогичен принципу действия автоматов регулирования продольного управления. В аналоговых автоматах реализуются следующие
зависимости коэффициентов штурвала 1сш.н и 1сш.э от приборной скорости:
Ьш.„ = кш.н(Упр),
(7.67)
1^ш.э = 1сш.э(Упр),
(7.68)
•
где к ш н ( У ) =
упнп .
У
пр.н>
т п
(V — У
п р .'ы
у
/ушах _ угшп \ V пр
т
V т пр.н
пр .н /
ах П И
.э Р
ах
ш.э
У
у
пр
ЬпЧп
К
ш.э
П
/итах _ 1.т!п
ш 3
ш 3
'
'
_ ,..т1п ,
РИ
У
у
пр
та
У
* п р*
.н
т п
у
' •
у
пр.э>
ГЛ/тах
\Упр.Э
Т
У
1
— V"
'" ^ ппи
У
п р . э ) ПРИ
пр.э/
утах .
У
пр.э'
^п^н» ^пр."н' ^пр°э> У™р Х 3 - минимальные и максимальные значения приборной скорости для изменения коэффициента штурвала соответственно в канале руля направления и канале элеронов; к"'^, 1с™", к™'", к™"-минимальные и максимальные
значения коэффициентов штурвала соответственно в канале руля направления
и канале элеронов.
Зависимости коэффициентов штурвала кш.„ и кш. э от приборной скорости У пр аналогичны зависимости коэффициента 1сш.в, показанной на
рис. 7.20. Эти зависимости содержат два участка с неизменными максимальными значениями коэффициентов (при малой скорости) и минимальными значениями коэффициентов (при большой скорости). Коэффициенты
изменяются от максимального до минимального значения на кусочнолинейных участках (одном или нескольких). В канале руля направления
регулирование коэффициента штурвала обычно осуществляется в более
широких пределах.
В состав автоматов (рис. 7.23 и 7.24) входят система воздушных сигналов СВС как датчик приборной скорости, вычислители В и сервоприводы
244
Рис. 7.23. Функциональная схема аналогового автомата регулирования путевого
управления, включенного в бустерную систему управления рулем направления
коэффициентов штурвала СЯ/сш „ и СЯ/сш.э. Вычислитель и электронная
часть каждого сервопривода образуют соответствующие каналы блоков
автоматики Б А. Исполнительными устройствами сервоприводов служат
электромеханизмы вращательного действия МбД/сш н и МВДЬШ.Э, которые
управляют соответствующими кинематическими механизмами изменения
коэффициентов штурвала КМ1сшн и КМЪ.Ш.Э.
Автомат регулирования путевого управления кроме канала регулирования 1сш.„ обычно содержит также канал ограничения хода педалей Ах н о г р ,
который состоит из своего вычислителя В и сервопривода С77Дхн огр на базе
механизма эффекта триммирования МЭТ.
Работа автоматов регулирования путевого и поперечного управления по
изменению коэффициентов штурвала аналогична работе автомата регулирования продольного управления. Работа автомата регулирования путевого управления по ограничению хода педалей заключается в следующем.
При достижении самолетом некоторой заданной приборной скорости
V* система СВС выдает в блок автоматики команду иу* . Вычислитель
пр
этого канала формирует управляющее напряжение ив на обмотку управ-
Рис. 7.24. Функциональная схема аналогового автомата регулирования поперечного
управления, включенного в бустерную систему управления элеронами
245
ления электродвигателя механизма МЭТ. Электродвигатель имеет две
обмотки управления, обеспечивающие движение выходного звена МЭТ как
в одну, так и в другую сторону. Так как управление производится
достаточно медленно и жестких требований по динамике нет, сервопривод
канала ограничения хода педалей работает без обратной связи. Выходное
звено МЭТ через кинематическую передачу соединено со специальной
качалкой, которая резко увеличивает загрузку педалей, когда МЭТ задвигает механическую проводку в паз качалки. Это обеспечивает невозможность перемещения руля направления пилотом на значительные углы на
больших скоростях и предохранение киля самолета от больших аэродинамических нагрузок. Когда приборная скорость самолета уменьшается до
У* р , автомат переводит выходное звено МЭТ в выдвинутое положение
и освобождает проводку управления рулем направления.
В цифроаналоговых АРУ реализуется нелинейная аппроксимация зависимости коэффициента штурвала от приборной скорости, например кубическая, когда
п
V* пр <г"
^\?™'
• пр. н•?
(V } = '
тш
тах
ппи
У н 5%<V„р
V *а
<Vупр. н »•
при V „р.
1 (, У Пр >
П
691
^; .иу)
утах
' пр. н •
Автоматы регулирования путевого и поперечного управления на базе
автоматов бокового управления не оказывают собственного воздействия на
кинематику механических проводок руля направления и элеронов. Эти
автоматы обеспечивают изменение передаточных коэффициентов по отклонению педалей к х _ и отклонению штурвала к х> автоматов бокового управления в функции скоростного напора я:
(7.70)
(7.71)
где
зависимости
^ = Г(УП-Р ),
1сХп = Г^)
и
1сХэ = Г^)
аналогичны
зависимостям
(7.67Н7.69).
Полные отклонения руля направления и элеронов пилотом и автомат
тикой имеют вид:
где 1сш.„(ч) = и ш . н + Мя); ^ш.э(я) = 1^ш.э + Ч(ч)-
Таким образом осуществляется регулирование коэффициентов штурвала руля направления и элеронов без изменения кинематики механической
проводки.
Разновидностями автоматов регулирования путевого и поперечного
управления являются автоматы регулирования путевой и поперечной загруз246
ки (АРЗ)- средства автоматического управления, обеспечивающие стабилизацию статических характеристик боковой управляемости путем регулирования коэффициентов проводок управления рулем направления и элеронов по усилиям при изменении режима полета.
При этом реализуются зависимости коэффициентов \^" и к^' от приборной скорости либо скоростного напора и высоты:
1^' = 1<'(УПР),
(7.72)
кхр; = к^(Упр).
(7.73)
Причем эти зависимости аналогичны зависимостям (7.67) и (7.68).
Коэффициенты проводки управления рулем направления и элеронами
по усилиям изменяются таким образом, чтобы градиенты усилий на
педалях и штурвале оставались постоянными. Это позволяет увеличить
загрузку управления для сохранения ощущения скорости полета по усилиям
на педалях и штурвале.
Функциональные схемы АРЗ путевого и поперечного управления отличаются от функциональных схем АРУ1сш.н и АРУ1сш э , представленных на
рис. 7.23 и 7.24, тем, что электромеханизмы МВД воздействуют на кинематические механизмы загружателей МЗ без изменения кинематики проводок
управления от педалей и штурвала к рулевым приводам руля направления
и элеронов. Работа АРЗ аналогична работе АРУк ш „ и АРУк ш . э .
Влияние автоматов регулирования путевого и поперечного управления на
характеристики боковой управляемости самолета. Статические характеристики боковой управляемости само лета-градиенты перемещения и усилий на педалях и штурвале по углам скольжения и крена согласно (4.45)(4.50) зависят от коэффициентов штурвала 1сш.„ и 1сш.э, градиентов усилий
на педалях и штурвале по перемещению Р„" и Р*', градиентов руля
направления и элеронов по скольжению 5„ и б!, и крену 6^ и 5,.
Характеристики боковой управляемости самолета можно выразить
следующим образом:
Коэффициенты усиления самолета по углу скольжения имеют вид:
. _ \_ _ Ар
8
=
'
, _ \_ _ Ар
'
Коэффициенты усиления кр" и кр' меняются по режимам полета, но
наиболее существенно зависят от скоростного напора ц, причем эта
зависимость является прямо пропорциональной. Поэтому для обеспечения
постоянных значений градиентов Х„ и Х|, необходимо менять коэффициенты штурвала 1сш.„ и 1сш.э обратно пропорционально коэффициентам усилеа
о
247
ния Ц" и Ц', а следовательно, обратно пропорционально скоростному
напору ^.
Эти задачи как раз и решают автоматы регулирования путевого
и поперечного управления. Тогда получают постоянные значения статических характеристик боковой управляемости при изменении скоростного
напора:
Х„ = - -р-т- - * СОП81, X, = - - - % СОШ1.
Влияние отказов автоматов регулирования путевого и поперечного
управления на управление боковым движением аналогично влиянию отказов автоматов регулирования продольного управления на управление
продольным движением. Отказы автоматов на малых скоростях полета при
взлете затрудняют пилотирование самолета на больших скоростях в крейсерном режиме и, наоборот, отказы автоматов на больших скоростях
полета в крейсерном режиме затрудняют пилотирование самолета на
малых скоростях при посадке.
Особенностью автоматов регулирования путевого управления является
наличие канала управления ограничения хода педалей. Для выполнения
этой функции при отказе автомата предусмотрено ручное аварийное
управление механизмом МЭТ от специального тумблера.
Глава 8
УПРАВЛЕНИЕ АЭРОДИНАМИЧЕСКИМИ
СИЛАМИ
Известны недостатки традиционного «моментного» управления движением самолета посредством рулей и элеронов-косвенное воздействие на
подъемную силу, запаздывание, невысокая точность управления и т.д.
Поэтому возникает задача улучшения характеристик управляемости и точности управления с помощью органов непосредственного управления
аэродинамическими силами и соответствующих автоматических средств.
Известны также негативные последствия упругости самолета - отрицательное физиологическое влияние на экипаж и пассажиров, развитие усталостных повреждений конструкции самолета и т. д. Поэтому возникает задача
подавления аэроупругих колебаний и снижения маневренных нагрузок на
конструкцию самолета. Этим целям служат автоматы непосредственного
управления аэродинамическими силами или автоматы активного управления.
Среди таких автоматов различают автоматы непосредственного управления подъемной сил9Й, силой лобового сопротивления, боковой силой,
автоматы управления маневренной нагрузкой крыла, автоматы подавления
248
(демпфирования) аэроупругих колебаний фюзеляжа и крыла. Общей особенностью этих автоматов является «безмоментное» управление движением самолета с помощью нетрадиционных органов управления.
8.1. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОДЪЕМНОЙ СИЛОЙ
И СИЛОЙ ЛОБОВОГО СОПРОТИВЛЕНИЯ
8.1 .1 • Автоматы непосредственного управления
подъемной силой и силой лобового сопротивления
Устройство и работа. Традиционное «моментное» управление продольным движением с помощью руля высоты имеет ряд недостатков. Руль
высоты воздействует на подъемную силу косвенно через создаваемый им
управляющий аэродинамический момент тангажа. При отклонении руля
высоты, например, вверх на нем возникает направленная вниз аэродинамическая сила. Эта сила, во-первых, уменьшает суммарную подъемную
силу, а во-вторых, создает продольный аэродинамический момент с некоторым запаздыванием, обусловленным инерционностью самолета, приводит к увеличению угла атаки. Увеличение угла атаки сопровождается
приращением подъемной силы, превышающим ее первоначальное уменьшение. Самолет переводится в режим набора высоты.
Возникающее в момент отклонения руля высоты уменьшение суммарной подъемной силы вызывает уменьшение высоты -просадку самолета.
Просадка зависит от продольного момента инерции, определяемого массой
самолета, и длины плеча горизонтального оперения. Время запаздывания
реакции самолета, в течение которого наблюдается просадка (или взмывание) после отклонения руля высоты, примерно равно четверти периода
продольного короткопериодического движения самолета гк .
Влияние запаздывания реакции самолета на точность пилотирования
особенно заметно у тяжелых пассажирских самолетов и затрудняет действия пилота при заходе на посадку и при посадке. Автоматы непосредственного управления подъемной силой и силой лобового сопротивления
облегчают пилоту процесс пилотирования в ответственных режимах полета.
Автомат непосредственного управления подъемной силой (АНУПС)средство автоматического управления, обеспечивающее улучшение продольной управляемости самолета и точности управления вертикальной
траекторией полета путем отклонения органа непосредственного управления подъемной силой (например, интерцепторов) при воздействии пилота
на колонку штурвала.
Простейший автомат непосредственного управления подъемной силой
реализует следующий закон управления интерцепторами:
.г
Л5 у
,
,
=1с х ;Ах в ,
,0 , ч
(8.1)
249
Рис. 8.1. Функциональная схема цифроаналогового автомата непосредственного
управления подъемной силой
.„АНУПС
где До у
-автоматическое отклонение интерцепторов автоматом непосредственного управления подъемной силой из определенного, являющегося нейтральным,:
выпущенного положения; к/ - передаточный коэффициент по отклонению колонки
штурвала, показывающий, на какой угол должны отклониться интерцепторы при,
отклонении пилотом колонки штурвала от балансировочного положения на 1 мм. I
Использование собственного рычага управления интерцепторами неце-1
лесообразно, так как появляется опасность непроизвольного ошибочного;
управления. Поэтому в автомате, реализующем закон управления (8.1),;
обеспечивается совмещенное управление интерцепторами и рулем высоты;
от колонки штурвала.
Обычно автомат непосредственного управления подъемной силой объединяется с автоматом продольной устойчивости. Тогда его закон управления имеет вид
. АНУПС , б, .
А
(8.2)
Дог
= к ' Дп + 1кб, Дх
п
х
в
Управление интерцепторами осуществляется с помощью электродистанционной системы управления. Предварительный выпуск интерцеп-;
торов в нейтральное для последующего управления положение осуществляется вручную пилотом от автономного рычага управления интерцепто-1
рами (РУИ).
В состав автомата (рис. 8.1) входят датчик положения колонки штурвала ДП, датчик линейных вертикальных ускорений ДЛУ, вычислительный
блок устойчивости и управляемости БВУУ и сервопривод СЯ5у. Электронная часть сервопривода образует электронный блок автомата БА в канале
интерцепторов. Сервопривод СЯ5у является составной частью электродистанционной системы управления интерцепторами от рычага РУИ.
Датчики ДП, ДЛУ и вычислитель БВУУ-составная часть автомата продольного управления.
250
Автомат непосредственного управления подъемной силой работает
следующим образом. Перед включением автомата пилот с помощью РУИ
и электродистанционной системы управления производит выпуск органов
непосредственного управления подъемной силой 0ЯУЯС-интерцепторов
на определенный угол (5у = 10°). После включения автомата его дальнейшее управление пилотом осуществляется от колонки штурвала КШ. При
отклонении пилотом колонки штурвала датчик ЦП вырабатывает электрический сигнал и Д х , пропорциональный Ах в . Этот сигнал преобразуется
в вычислителе БВУУ в управляющий сигнал автомата продольного управления иств, который вызывает отработку сервопривода руля высоты СЯ5„,
и в управляющий сигнал автомата непосредственного управления подъемной
силой иа , который вызывает отработку сервопривода интерцепторов
СЯ5у. В зависимости от направления отклонения Ах в интерцепторы будут
отклоняться вверх до максимального выпущенного положения (5у = 20°),
создавая уменьшение подъемной силы на величину — У а5у , либо вниз до
убранного положения (8у = 0), создавая увеличение подъемной силы на
величину У а а у .
Отклонение интерцепторов изменяет избыточную нормальную перегрузку Ап у .' Сигнал с датчика ДЛУ ид„у скомпенсирует в вычислителе
БВУУ сигнал идх> и управляющий сигнал ист_ станет равным нулю. Тогда
сервопривод СП5у вернет интерцепторы в нейтральное положение (5у =
= 10°). При возвращении пилотом колонки штурвала в балансировочное
положение все процессы повторятся в обратном порядке. Таким образом
достигается согласованное управление рулем высоты и интерцепторами.
Автомат непосредственного управления силой лобового сопротивления средство автоматического управления, обеспечивающее улучшение продольной управляемости и точности управления вертикальной траекторией
полета путем отклонения органа непосредственного управления силой
лобового сопротивления (например, тормозных щитков, интерцепторов
или спойлеров в тормозном режиме).
Пока функции автомата непосредственного управления силой лобового
сопротивления выполняют некоторые автоматы бокового управления при
послепосадочном пробеге по взлетно-посадочной полосе. При получении
разовых команд об обжатии шасси и установке рычагов управления
двигателями в положение «Реверс» производится автоматический выпуск
на максимальный угол вверх интерцепторов и выдается разовая команда на
выпуск тормозных щитков. Для управления траекторией полета гражданских ВС такие автоматы пока не применяются.
Влияние автоматов непосредственного управления подъемной силой на
управление продольным движением и особенности законов управления. Просадка самолета АНпр и время запаздывания 1зап определяют несовершенство
«моментного» управления траекторией (рис. 8.2, а). При согласованном
отклонении руля высоты и органа непосредственного управления подъемной силой с помощью АНУПС удается ликвидировать отрицательное
приращение избыточной перегрузки, а следовательно, и просадку самолета
(рис. 8.2,6).
251
АН,
Рис. 8.2. Переходные процессы по избыточной нормальной перегрузке и приращению
высоты при ступенчатрм отклонении руля высоты:
а-при традиционном управлении; б-при управлении с помощью АНУПС
Недостатком совместного координированного управления рулем высоты и органом непосредственного управления подъемной силой является
уменьшение эффективности продольного управления от колонки штурвала.
От этого недостатка избавлены АНУПС с законом управления
А6
АНУПС
Т6уР
х
1сх;Дхв].
(8.3)
При резком отклонении колонки штурвала от балансировочного
положения, направленном на изменение перегрузки, реакция ОНУПС
А8
АНУПС
(I) определяется переходной функцией изодромного фильтра с
постоянной времени
КО;
Таким образом, в начальный момент времени 1 = 0 ОНУПС скачком
. „АНУПС ,„,
, 8
отклоняется на угол До у
(0) = к х ^, а затем это отклонение экспоненциально устраняется. Это обеспечивает управление подъемной силой лишь в
начальной фазе маневра и сохраняет эффективность продольного управления.
Известен неблагоприятный «рулевой эффект», вносимый АНУПС при
отклонении ОНУПС. Наиболее существенно он проявляется в том случае,
когда точка приложения подъемной силы не совпадает с центром масс
самолета. За счет поворота вектора скорости отклонение ОНУПС Л8^НУП
вызывает изменение первоначального угла атаки, что приводит к запаздыванию в управлении перегрузкой. «Рулевой эффект» ОНУПС может быть
скомпенсирован, если в закон управления автомата продольной управляемости ввести составляющую, пропорциональную отклонению ОНУПС
АНУПС
Д6
. Это особенно полезно при выполнении посадки, когда постоянство угла атаки, обеспечиваемое АПУ и АНУПС, позволяет приблизиться без
снижения уровня безопасности к предельно допустимым углам атаки и тем
самым снизить посадочную скорость.
252
Благодаря наличию цифрового вычислителя АНУПС позволяет сформировать достаточно сложные законы управления с использованием сш налов и разовых команд других систем (рис. 8.3). В канале управления
интерцепторами реализуется следующий закон управления:
АНУПС
1
= МАХВ)
п 5, А
[к х "Дх„-аВСУП,
] + .к„8,
в
к а '(а,а доп )[а-а доп ]
3.4)
,ВСУП
Использование в законе управления (8.4) сигнала § в " " от вычислительной системы управления полетом ВСУП в режиме автоматического
управления позволяет участвовать АНУПС в управлении траекторией
полета самолета. Тогда повышается качество процессов стабилизации
и управления высотой и углом наклона траектории. Более эффективно
парируются возмущения при полете в турбулентной атмосфере. Введение
в закон управления (8.4) сигнала, пропорционального разности между
текущим значением угла атаки а, получаемым от системы воздушных
сигналов СВС, и допустимым значением угла атаки, хранящимся в памяти
вычислителя, позволяет предотвратить выход самолета на недопустимые
углы атаки. Перекрестная связь АНУПС с АПУ в канале руля высоты
осуществляется с помощью следующего закона управления:
-АПУ
АНУПС
„
= РАНУПС
8
"
,,.
(8.5)
/0
Таким образом компенсируется «рулевой эффект». Коррекция передаточных коэффициентов законов управления (8.4) и (8.5) по отклонению
колонки штурвала, текущему и допустимому углам атаки позволяет улучшить качество переходных процессов. Структурная схема АНУПС, реализующего законы управления (8.4) и (8.5), представлена на рис. 8.3. Так
'
1
'А'Р+1
Т&,р
Т&,р+1
5ВУУ
Рис. 8.3. Структурная схема АНУПС
253
реализуется непосредственное управление подъемной силой с помощью
АСУУ-96.
Использование АНУПС позволяет перейти от традиционной формы
продольного движения, когда возбуждаются все фазовые координаты
(Да = 0, До = О, АН = 0) вследствие отклонения руля высоты, к новым
формам движения. В качестве таких форм возможно изолированное движение по тангажу (Да = 0, Ди = О, ДН = 0), изолированное вертикальное
перемещение (Да = 0, До = О, ДН = 0), поворот фюзеляжа вокруг вектора
скорости (Да = 0, Дч = 0, Дпу = 0).
При изолированном движении по тангажу может быть осуществлен
маневр с неизменным углом атаки. Перегрузка создается ОНУПС, при
этом руль высоты должен парировать демпфирующий момент, возникающий при развороте вектора скорости.
При изолированном вертикальном перемещении осуществляется поступательное перемещение фюзеляжа при неизменном угле тангажа. Маневр
производится вследствие перегрузки от непосредственно создаваемой подъемной силы. Изменение угла атаки, связанное с искривлением траектории,
препятствует маневру. Это противодействие перекрывается создаваемой
подъемной силой до тех пор, пока ОНУПС парирует силу, вызываемую
изменением угла атаки, после чего искривление траектории прекращается.
При этом руль высоты должен стабилизировать тангаж.
Поворот фюзеляжа вокруг вектора скорости реализуется в результате
изменения угла атаки, вызываемого отклонением руля высоты. ОНУПС
при этом стабилизирует перегрузку.
Использование АНУПС позволяет решить еще ряд задач: снизить
маневренную нагрузку крыла, повысить комфорт пассажиров и экипажа
и т.д. Для снижения маневренной нагрузки крыла АНУПС обеспечивает
смещение центра давления к фюзеляжу, симметрично отклоняя элероны
и закрылки. Прямое управление подъемной силой для разгрузки крыла не
должно ухудшать характеристики продольной управляемости. Для этого
организуется согласованное отклонение руля высоты и органов механизации, вызывающих перераспределение нагрузки по размаху крыла. Например, при отклонении колонки штурвала в сторону положительного
приращения перегрузки внешняя секция элеронов с помощью АНУПС
отклоняется передней кромкой вверх, создавая отрицательную подъемную
силу на конце крыла, а закрылки или внутренние секции элеронов отклоняются вниз, создавая дополнительную подъемную силу в корневой части
крыла. Органы механизации не мешают рулю высоты изменять угол атаки
на увеличение подъемной силы, если создаваемые ими силы составляют
пару. При этом суммарная подъемная сила зависит лишь от угла атаки.
Использование АНУПС для повышения комфорта пассажиров и экипажа обусловлено возможностью снижения уровня действующих на них
вертикальных перегрузок. Работоспособность пилота зависит как от величины случайной перегрузки и времени ее действия, так и от ее частоты. Так,
ветровые воздействия, вызывающие в течение нескольких минут нормальную перегрузку со средним квадратическим отклонением примерно 0,5
снижают качество управления. При случайных перегрузках свыше 0,2
254
пилоту трудно считывать показания приборов. Колебания перегрузки
с частотой около 1 Гц могут быть причиной функциональных расстройств
организма пилота, приводящих к дезориентации.
Компенсация изменений подъемной силы от порывов ветра посредством АНУПС по сигналам приращения перегрузки позволяет существенно
повысить комфорт экипажа и пассажиров.
8.1.2. Моделирование непосредственного управления
подъемной силой
Рассмотрим модель продольного короткопериодического движения самолета при наличии управляющих воздействий пилота на колонку штурвала и включенных автомате непосредственного управления подъемной
силой и автомате продольной управляемости. Модель содержит уравнение
состояния, уравнения входа и выхода, законы управления ручного контура,
автомата продольной управляемости и автомата непосредственного управления подъемной силой:
х„к (I) = А пк хт (I) + В^ им (I),
(8.6)
Уп.(1) = *п.(й
(8-7)
(8.8)
(8.9)
0],
[Д5а(1)]т = [Д5вШУ(1) Д6*НУПС(1)],
(8.10)
(8.11)
(8.12)
(8.13)
где хп„(1) =
Дш2(1)
Да (I)
Яш,, 8,
в;,,
А пк =
0
В"
= 1с
*-* ПК
"-Ш. В>
ЛПУ
П
"пк
—
в
О
АНУПС = ^8,
Подставим уравнения выхода (8.7), входа (8.8) и законы управления
(8.9)-(8.13) в уравнение состояния (8.6) и возьмем преобразование Лапласа
при нулевых начальных условиях:
(р! - АПЕ)У„(р) = В^ОПК ДХв(р),
где
"••Ч * ]•
Г ^ в + 41
255
Получим вектор передаточных функций по параметрам продольного
короткопериодического движения самолета на отклонение пилотом колонки штурвала
Переходная матрица состояния продольного короткопериодического
движения самолета при включенном автомате непосредственного управления подъемной силой
Ф«НУПС(Р) = (Р1 - А™)" 1 = Ф*ПУ(р) = ФПК(Р).
Тогда с учетом обозначений выражения (3.89):
'
(8.14)
{ аа)со2 [аШ1,8> (кш.в + кх<) + аЩ1,6у
АНУПС
Р+1)
.
(8Л5)
(8.16)
Анализ передаточных функций (8. 14) -(8. 16) и их сравнение с передаточными функциями самолета, управляемого АПУ (7.25) -(7.27), показывает,
что АНУПС не влияет на их структуру, но изменяет характеристики
образующих звеньев. Выбором передаточного коэффициента к/ удается
АНУПС
обеспечить требуемые значения коэффициентов усиления к^
"
АНУПС
и кау
,
а также постоянных времени форсирующих звеньев Т" и Ту„ . Это позволяет
снизить негативные последствия «моментного» управления продольным
движением с помощью руля высоты (рис. 8.4).
Передаточная функция (8.15) отражает, кроме того, «рулевой эффект»
отклонения ОНУПС. При повороте вектора скорости отклонение 8у вызывает изменение первоначального угла атаки. «Рулевой эффект» отклонения
256
Рис. 8.4. Структурная схема
замкнутой системы «самолет АНУПС»
ДХв
., АНУПС
создает запаздывание в управлении перегрузкой и при необходимости может быть скомпенсирован отклонением руля высоты. Условие
компенсации вытекает из приведенной на рис. 8.4 структурной схемы:
Д5„
Да = Да' + Да" = —
Д5у = О,
(8.17)
(8.18)
Если ввести составляющую (8.18) в закон управления АПУ, то рулевой
эффект отклонения ОНУПС будет скомпенсирован.
Рассмотрим модель продольного длиннопериодического вынужденного
движения самолета при наличии управляющих воздействий пилота через
автомат непосредственного управления подъемной силой с законом управления (8.1). Тогда уравнение состояния (3.94) можно записать в виде
х„д(1) = А пд х пд (1) + В>,ДД5*НУГ1С(1),
т
(8.19)
т
где [хш(1)] = [ДУ(1)Д9(1)]; [В^д] = [0 ае,8у] .
Уравнение выхода (3.97) подставим в уравнение (8.19), возьмем преобразование Лапласа и .получим вектор передаточных функций самолета по
параметрам длиннопериодического движения на управляющее воздействие
пилота при включенном АНУПС
.АНУПС
НУПС
1
(Р) = АХ (р)
пд
в>;дв
в
| щ
I Г^1
Л
I
-^
К }
•
или
(8.20)
(8.21)
Сравнивая передаточные функции (8.20) и (8.21) с передаточными
функциями самолета в длиннопериодическом движении на управляющие
9 Зак. 948
257
воздействия пилота через руль высоты, приходим к выводу, что управление
длиннопериодическим движением посредством АНУПС обладает существенно меньшей инерционностью, чем управление посредством руля высоты.
Аналогичным образом проводится исследование продольного длиннопериодического вынужденного движения самолета при наличии управляющих воздействий пилота через автомат непосредственного управления
силой лобового сопротивления. Инерционность управления длиннопериодическим движением с помощью такого автомата существенно меньше
инерционности традиционного управления через руль высоты.
Маневры самолета в продольной плоскости осуществляются пилотом
энергичным отклонением колонки штурвала. При включенных автоматах
непосредственного управления подъемной силой и продольной управляемости это воздействие преобразуется в одновременное согласованное
отклонение руля высоты и ОНУПС. На этапе короткопериодического
движения происходит формирование новых значений угловой скорости
тангажа, угла атаки и нормальной перегрузки:
(Асо г ) у с т = 11т
р-О
Аа усТ = Нт <
р-О
Апу< = Нт {Ах в '
Р-О
"
ё
Выбором передаточных коэффициентов к х- и ]сх', функциями которых
являются коэффициенты усиления по угловой скорости тангажа и углу
атаки, можно обеспечить требуемую эффективность продольного управления.
Переходные процессы описываются переходными функциями:
АНУПС
л..'
Ах в
1#
(Т у Р +1)
АНУПС
ДПу (р) =
Лх V 0 Р
Ь8У
^Ь 1_±Ь _Ь!
Р
8
а
(1уР+1)
ГГ п 4- П
.
2
Т^р +2Та^аР+1
Выбором передаточных коэффициентов к х и 1сх у , функциями которых
являются постоянные времени Т у и Т у а , можно обеспечить требуемый вид
переходных процессов при отклонении пилотом колонки штурвала.
258
8.2. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ БОКОВОЙ СИЛОЙ
8.2.1. Автоматы непосредственного управления
боковой силой
Устройство и работа. Традиционное «моментное» управление боковым
движением с помощью руля направления имеет ряд недостатков. Руль
направления воздействует на боковую силу лишь косвенно через создаваемый им управляющий аэродинамический момент рыскания М У 8 к . В условиях действия бокового ветра такое управление обладает большой
инерционностью. Кроме того, отклонение руля направления приводит не
только к движению рыскания, но и к движению крена за счет возникновения
спирального момента крена. Поэтому парирование бокового ветра отклонением руля направления приводит к возникновению крена, который
необходимо компенсировать отклонением элеронов. Таким образом, «моментное» управление боковым движением не позволяет обеспечить высокое
качество управления.
Влияние запаздывания реакции самолета на отклонение руля направления и элеронов особенно проявляется у тяжелых самолетов и затрудняет
действия экипажа при заходе на посадку и при посадке. Автоматы непосредственного управления боковой силой облегчают экипажу процесс
пилотирования.
Автомат непосредственного управления боковой силой (АНУБС) средство автоматического управления, обеспечивающее улучшение боковой
управляемости самолета и точности управления горизонтальной траекторией полета путем отклонения органа непосредственного управления боковой силой (например, подфюзеляжного носового киля совместно с рулем
направления) при воздействии пилота на педали.
Простейший автомат непосредственного управления боковой силой
реализует следующий закон управления:
к! : Ах н ,
(8.22)
где А5 2
-автоматическое отклонение ОНУБС от нейтрального положения; к х г передаточный коэффициент по отклонению педалей на ОНУБС.
Совместное управление рулем направления и подфюзеляжным носовым
килем от педалей имеет преимущество перед раздельным управлением, так
как не требует от пилота управляющих воздействий на дополнительный
управляющий орган и исключает возможность непроизвольного ошибочного управления. Целесообразно комплексирование АНУБС и АБУ, тогда
его закон управления имеет следующий вид:
. АНУБС
8
, 1 8, А
А6
= 1к„;п
2
г + к х ;;Дх н .
г
г
.-о т>\
(8.23)
В состав цифроаналогового АНУБС входят датчик положения педалей
ЦП, датчик линейных горизонтальных ускорений ДЛУ, вычислительный
блок устойчивости и управляемости БВУУ, сервоприводы руля направ9*
259
Сигналы
и разобые •
команды
других
систем •
«8
а
&,
л<5„ 1
4&
шее
Рис. 8.5. Функциональная схема цифроаналогового АНУБС
ления С775Н и ОНУБС СЯ82 (рис. 8.5). Электронная часть сервоприводов
образует электронный блок автомата БА в каналах руля направления
и ОНУБС. Руль направления управляется также с помощью электродистанционной системы управления Э ЦСУ 8 Н .
Автомат работает следующим образом. При отклонении пилотом
педалей датчик ДП вырабатывает электрический сигнал ид Хв , пропорциональный Ах н . Этот сигнал в вычислителе БВУУ формирует управляющий сигнал и„я на сервопривод руля направления С778Н и управляющий
сигнал иПг на сервопривод ОНУБС С775г. В зависимости от направления
отклонения Ах н руль направления и ОНУБС будут синхронно отклоняться
в одну или другую сторону, создавая управляющую аэродинамическую
боковую силу 2а8г. Эта сила вызовет изменение поперечной перегрузки п г .
Сигнал с датчика ДЛУ и„г скомпенсирует в вычислителе БВУУ сигнал
и4Хв и управляющие сигналы и^ и и„г станут равными нулю. Таким образом
достигается согласованное управление рулем направления и ОНУБС.
АНУБС на гражданских ВС пока не получили такого распространения
как АНУПС. Исследуются различные варианты построения этих автоматов
в зависимости от способа создания боковой силы. Кроме рассмотренного
способа создания боковой силы совместным управлением рулем направления и подфюзеляжны'м носовым килем существует ряд других способов.
Так, возможна установка ОНУБС под фюзеляжем вблизи центра масс
самолета, использование вертикальных рулевых поверхностей на несущем
крыле, дифференциальное управление тягой расположенных симметрично
относительно фюзеляжа двигателей.
Влияние автоматов непосредственного управления боковой силой на управление боковым движением. АНУБС, создавая управляющую аэродинамическую боковую силу 2 а5г , позволяет снизить инерционность управления
боковым движением самолета, так как не вызывает вращений самолета
относительно осей ОУ и ОХ. Компенсация бокового ветра при заходе на
посадку путем отклонения ОНУБС позволяет выполнить посадку без углов
сноса и крена, с меньшей интенсивностью отклонения рычагов управления.
260
При этом уменьшаются посадочные дистанции, разброс точек приземления, появляется возможность выбора более крутых посадочных траекторий. Снижается вероятность ухода на второй круг и сокращаются
интервалы между посадками самолета.
Управляющая аэродинамическая боковая сила может создаваться
АНУБС путем дифференциального управления тягой двигателей, обеспечивающего поворот вектора тяги в горизонтальной плоскости на углы до
20°. При этом несколько уменьшается тяга в продольном направлении.
Тогда автомат воздействует на рычаги управления двигателями, увеличивая тягу одного крайнего двигателя и уменьшая тягу противоположного
крайнего двигателя. Функции такого автомата может выполнять автомат
тяги, который будет рассмотрен в гл. И.
8.2.2. Моделирование непосредственного управления
боковой силой
Рассмотрим модель быстрого движения самолета по угловой скорости
рыскания и углу скольжения (4.23) при наличии управляющих воздействий
пилота на педали и включенном АНУБС. Модель содержит уравнение
состояния, уравнения выхода и входа и закон управления АНУБС:
х66 (I) = А66х66 (I) + В&6 Д5*НУБС (I),
(8.24)
(8.25)
Д§ АНУБС =
0 АНУБС д^^
(8 26
)
(1)
1
Ч>Э
А
ъ
1 > В*
-Г ° 1,1*
Л
ггдех
т е хб 6 (1)=
т ГАИ
„„,,
„ „*, , 1 > А
в б = Г" ""' .
бб —
1Др(1и
I ар>0)
ар,р ^
1ар,8^
р>0)у
Преобразование модели (8.24)-(8.26) приводит к получению передаточных функций:
(р! - А**) У66 (р) = В?6 ВА3НУБС ДХ„ (р),
(р) = - = (р! - А66) -1 В^6 В^НУБС = Ф^НУБС (р) В^б 06А6НУБС ,
Длн (р)
Где ф АН*ВС (р) = (р, _ Д66 ) - 1 = фАБУ(р) = ф^(р)
Передаточные функции имеют вид:
"х„'^ш
^ 5 г ^ 5'-^
^ - ,
" (р) = — -
,, г Дх. , .
XV
Ди
-
(о та\
(8.27)
261
Сравнивая передаточные функции (8.27) и (8.28) с передаточными
функциями самолета, управляемого АБУ, (7.54) и (7.55), приходим к выводу,
что они отличаются как структурой, так и характеристиками образующих
их звеньев. Выбором передаточного коэффициента к/ обеспечиваются
требуемые коэффициенты усиления самолета в быстром боковом движении
по угловой скорости рыскания и углу скольжения и снижаются негативные
последствия «моментного» управления боковым движением с помощью
руля направления.
8.3. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ МАНЕВРЕННОЙ НАГРУЗКОЙ
КРЫЛА И ДЕМПФИРОВАНИЕ АЭРОУПРУГИХ КОЛЕБАНИЙ САМОЛЕТА
Принцип действия автоматов управления маневренной нагрузкой крыла.
Решающее значение при нагрузке крыла имеет изгибающий момент,
возникающий при вертикальном маневре самолета. Уменьшение изги-бающего момента и снижение нагрузки на крыло с помощью автоматики
производится путем смещения центра давления к фюзеляжу (рис. 8.6). При
обычном управлении самолетом центры давления (ЦД) каждого крыла
находятся на значительном расстоянии от фюзеляжа. Поэтому при вертикальном маневре кривая нагрузки на крыло имеет выпуклый эллиптический
вид.
Требуемое изменение формы кривой аэродинамической нагрузки крыла
осуществляется с помощью его органов механизации. Для этой цели могут
быть использованы две пары симметрично отклоняемых внутренних
и внешних элеронов. Вместо внутренних элеронов могут также использоваться внутренние секции закрылков. Тогда при вертикальном маневре
внешние элероны отклоняются симметрично вверх и уменьшают подъемную силу, а следовательно, и нагрузку на близкой к концевой части крыла.
Внутренние элероны и закрылки отклоняются симметрично вниз и увеличивают подъемную силу, а значит, и нагрузку на близкой к корневой части
крыла.
Центры давления каждого крыла смещаются к фюзеляжу и форма
кривой аэродинамической нагрузки крыла принимает вогнуто-выпуклый
вид. Это позволяет снизить требования к прочности конструкции крыла,
Рис. 8.6. Распределение нагрузки
на крыло при обычном управлении (1) и при управлении маневренной нагрузкой (2)
определяемые нормальными перегрузками при маневре. Для решения этой
задачи предназначены автоматы управления маневренной нагрузкой крыла.
Автомат управления маневренной нагрузкой крыла (А УН) -средство
автоматического управления, обеспечивающее перераспределение нагрузок
на крыло при маневре самолета путем симметричного отклонения органов
управления маневренной нагрузкой (например, внутренних и внешних
элеронов) при возникновении избыточной нормальной перегрузки.
Простейший автомат управления маневренной нагрузкой крыла реализует следующие законы управления внутренними и внешними элеронами:
Л6*™ =к 6 „ Г 'Дп у ,
(8.29)
До*™ ш =-к* Г »Дп у ,
(8.30)
где Д8* а"т, Д5*^"ш-автоматическое отклонение соответственно внутренних и внешних элеронов автоматом управления маневренной нагрузкой крыла из нейтрального
положения; к „"••", 1сп"нш-передаточные коэффициенты по избыточной нормальной
перегрузке соответственно в канале внутренних и внешних элеронов.
Так как непосредственное управление подъемной силой для разгрузки
крыла не должно ухудшать характеристик продольной управляемости
самолета, сохранение обычного процесса нарастания нормальной перегрузки в ответ на отклонение колонки штурвала является обязательным.
Поэтому автомат управления маневренной нагрузкой крыла обычно комплексируется с автоматом продольного управления. Этим достигается согласованное действие руля высоты и органов механизации, обеспечивающих перераспределение нагрузки по размаху крыла. При этом освобождаются внутренние элероны для решения задач бокового управления. Закон
управления внешними секциями элеронов принимает вид
Д§^"ш = -1^-Дх, - к* Г -Дп у ,
,5
, ,
(8.31)
где кх'-™-- передаточный коэффициент по отклонению колонки штурвала в канале
внешних элеронов.
Автомат управления маневренной нагрузкой крыла (рис. 8.7) содержит
датчик положения колонки штурвала ЦП, датчик избыточной нормальной
перегрузки ДЛУ, вычислительный блок устойчивости и управляемости
БВУУ, сервопривод рулей высоты из состава автомата продольного
управления С775В и сервопривод внешних секций элеронов С775Э.ВНШ.
При отклонении колонки штурвала в сторону положительного приращения перегрузки датчиком ДП формируется сигнал и Д х > , пропорциональный смещению колонки штурвала относительно балансировочного положения, соответствующего перегрузке пу = 1. Вычислитель БВУУ формирует управляющий сигнал и 5
на сервопривод внешних элеронов, который отклоняет их задней кромкой вверх, создавая отрицательную подъемную силу на конце крыла. Одновременно автоматом продольного
управления отклоняется руль высоты, вызывающий изменение угла атаки
на увеличение общей подъемной силы. Отклонение внешних элеронов
создает пару сил и не мешает каналу руля высоты. При этом суммарная
263
Рис. 8.7. Функциональная схема автомата управления маневренной
нагрузкой крыла
подъемная сила зависит лишь от утла атаки. Уменьшение подъемной силы
вследствие симметричного отклонения элеронов компенсируется соответствующим увеличением отклонения руля высоты и угла атаки.
Отрицательная обратная связь по перегрузке обеспечивает формирование управляющего сигнала и 5
пропорционально сигналу и„ с датчика
ДЛУ. Чем больше положительное приращение перегрузки, тем больше
отклонение задней кромки внешних элеронов вверх. При этом положительная обратная связь в канале руля высоты позволяет восполнить
потерю в подъемной силе путем увеличения угла атаки.
По сигналу Ах в устанавливается изодромный фильтр, с помощью
которого от колонки к элеронам регулируется начальная фаза маневра:
АУН
Д5
*-»»-' э. внш = -кх
Л
Т„Р
ТИР
Ах, - Ьг„' °Лп„
(8.32)
Тогда при продолжительном отклонении колонки штурвала автомат
реагирует лишь на изменение перегрузки.
С
а)
Рис. 8.8. Изгибные колебания крыла:
а -1-й тон крыла; б -2-Й тон крыла
Рис. 8.9. Изгибные колебания фюзеляжа:
а- 1-й тон фюзеляжа; б -2-й тон фюзеляжа;
в -3-й тон фюзеляжа
264
<?(*)
Управление маневренной нагрузкой крыла лишь при наличии избыточных нормальных перегрузок позволяет сохранить требуемое эллиптическое
распределение подъемной силы по размаху крыла на крейсерском режиме
полета, когда пу = 1.
Принцип действия автоматов подавления аэроупругих колебаний фюзеляжа. Самолету как упругому телу свойственны собственные формы
и частоты упругих колебаний. Наиболее существенны изгибные колебания
фюзеляжа в вертикальной плоскости (рис. 8.8). Сочетание формы и частоты
собственных колебаний фюзеляжа называют тонами фюзеляжа. Аэроупругие колебания фюзеляжа вызываются как собственным движением
самолета, так и внешними возмущениями. Наиболее существенно влияние
ветровых воздействий. Доля упругих колебаний в создании вредных нормальных перегрузок растет с увеличением массы самолета, так как неизбежно уменьшается жесткость конструкции. Силовые эффекты, сопутствующие полету в турбулентной атмосфере, оказывают отрицательное
физиологическое влияние на экипаж, пассажиров, являются причиной
усталостных повреждений и даже разрушений конструкции. Поэтому перед
автоматикой ставится задача снизить вредное воздействие аэроупругих
колебаний фюзеляжа (рис. 8.9).
Автомат подавления (демпфирования) аэроупругих колебаний фюзеляжа
(А ПА К) -средство автоматического управления, обеспечивающее уменьшение амплитуды аэроупругих колебаний конструкции самолета путем симметричного отклонения органов управления аэроупругими колебаниями
(например, внешних элеронов или органов непосредственного управления
подъемной силой) при возникновении разности между избыточной нормальной перегрузкой, обусловленной движением самолета как твердого
тела, и избыточной перегрузкой упругого самолета.
Простейший автомат подавления аэроупругих колебаний фюзеляжа
реализует следующий закон управления внешними элеронами:
-4гОЧ-ЛпГ),
(8-33)
,.АПАК
где Д5Э внш -отклонение внешних элеронов автоматом подавления аэроупругих
колебаний фюзеляжа из нейтрального положения; Дпу-избыточная нормальная
перегрузка в центре масс самолета; Дп*пр-избыточная нормальная перегрузка
упругого самолета в точке приложения управляющей силы органа управления
аэроупругими колебаниями; 1с дп"""~ пере даточный коэффициент по разности избыточных нормальных перегрузок в канале внешних элеронов.
Функциональные схемы цифроаналогового автомата подавления аэроупругих колебаний аналогичны функциональным схемам АНУПС и АНУБС.
РАЗДЕЛ
III
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ
Глава 9
СТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ УГЛОВЫМ
ПОЛОЖЕНИЕМ
Задача автоматического управления угловым положением самолета
является одной из основных задач, возникающих при пилотировании.
Исторически эта задача ставилась и решалась даже раньше, чем задача
автоматического демпфирования и улучшения устойчивости и управляемости самолета. Поэтому автоматические средства управления угловым
положением самолета-автопилоты стали прообразами современных систем автоматического управления полетом. Автоматическое управление
угловым положением осуществляется путем отклонения рулей при появлении рассогласований между текущими и требуемыми значениями угловых
параметров положения самолета.
Благоприятное влияние автоматики на процесс управления самолетом
проявляется в улучшении качества переходных процессов возвращения
самолета к исходному режиму по угловым параметрам после непроизвольного отклонения под действием внешних возмущений. Так осуществляется
автоматическая стабилизация углового положения самолета. Кроме того,
автоматика помогает пилоту улучшить качество переходных процессов
вывода самолета на новый режим полета по угловым параметрам после
целенаправленного воздействия пилота на соответствующие органы управления. Так осуществляется автоматическое управление угловым положением самолета.
При автоматическом управлении угловым положением самолета приходится решать три взаимосвязанные задачи управления углами тангажа,
крена и курса. Соответственно различают три основных вида средств
автоматического управления угловым положением самолета: автопилоты
угла тангажа, автопилоты угла крена и автопилоты курса. В последнее
время задача автоматического управления углом тангажа часто решается
совместно с задачей автоматического управления нормальной перегрузкой.
Поэтому автопилоты нормальной перегрузки целесообразно также отнести
к средствам автоматического управления угловым положением самолета.
В современных системах автоматического управления автопилоты
присутствуют либо в виде самостоятельных подсистем, либо в виде
соответствующих режимов системы. Поэтому в дальнейшем под автопилотом будем понимать либо автономное средство, реализующее автоматическое управление угловым положением самолета, либо систему
автоматического управления, работающую в режиме управления угловым
положением.
266
9.1. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ
УГЛОМ ТАНГАЖА
9.1.1. Автопилоты угла тангажа
Устройство и работа. Необходимость управления углом тангажа
обусловлена статичностью самолета как объекта управления по этой
координате в продольном короткопериодическом движении под действием
внешнего момента тангажа или вертикального ветра. При решении этой
задачи пилот, наблюдая за изменением угла тангажа по указателю
авиагоризонта, воздействует на колонку штурвала и отклоняет руль
высоты таким образом, чтобы самолет удерживал требуемое значение угла
тангажа или изменял его соответствующим образом. Для освобождения
пилота от необходимости ручной стабилизации и управления продольным
короткопериодическим движением самолета служат автопилоты угла
тангажа.
Автопилот угла тангажа (АПо) - средство автоматического управления, обеспечивающее стабилизацию и управление продольным короткоперидическим движением самолета на всех этапах полета путем отклонения
руля высоты при возникновении рассогласования между значениями
текущего и заданного углов тангажа.
Простейший автопилот угла тангажа реализует следующий закон
управления рулем высоты:
8^П° = 1сШжт, + МА«-А« М д),
„
о
(9-1)
,
где о в -автоматическое отклонение руля высоты от балансировочного положения
автопилотом угла тангажа; Ди и А иэад-соответственно приращения текущего
и заданного значений угла тангажа; к„-передаточный коэффициент по углу тангажа,
определяющий, на какой угол должен отклониться руль высоты при возникновении
рассогласования между значениями приращений текущего и заданного углов
тангажа в 1°.
Другими словами, автоматическое отклонение рулей высоты от балансировочного положения автопилотом угла тангажа пропорционально
угловой скорости тангажа и разности приращений текущего и заданного
углов тангажа.
Автопилоты угла тангажа устанавливаются на самолеты как с прямой
обратимой системой управления рулем высоты, так и с бустерной или
электродистанционной системой. В зависимости от вида системы управления автопилоты обеспечивают либо параллельную схему включения исполнительного устройства сервопривода в механическую проводку управления
рулем высоты (прямые обратимые системы управления), либо последовательную схему (бустерные и электродистанционные системы управления).
Как в том, так и в другом случае исключается возможность совместного
управления рулем высоты автопилотом и пилотом от колонки штурвала.
267
При воздействии пилота на колонку штурвала автопилот выключается
и освобождает механическую проводку управления рулем высоты.
В зависимости от принципа действия сервопривода различают электромеханические и электрогидравлические автопилоты угла тангажа. Рассмотрим функциональную схему аналогового электромеханического автопилота угла тангажа с жесткой и скоростной обратными связями в
сервоприводе (рис. 9.1). В состав автопилота входят датчик угловой
скорости тангажа ДУС, датчик угла тангажа-гировертикаль ГВ, задатчик
угла тангажа-рукоятка управления РУ, механизм согласования МС и сервопривод руля высоты. Механизм согласования вместе с сумматором
сервопривода образуют канал руля высоты вычислителя автопилота ВАПъ.
Автопилот угла тангажа работает в трех режимах: согласования, стабилизации и управления углом тангажа. В режиме согласования рулевая
машина высоты не включена, а положение ее выходного вала согласовано
с положением руля высоты. На вход механизма согласования с гировертикали поступает сигнал иц, пропорциональный текущему значению угла
тангажа о ^ 0. Контакт 7 замкнут и с выхода сумматора сервопривода на
вход механизма согласования поступает сигнал, пропорциональный
алгебраической сумме сигналов и„ и ижос (для простоты будем считать
самолет сбалансированным и руль высоты неподвижным, тогда 6В 6ал ^ О,
и
*ос ^ 0> исос = 0> ио>, = 0). В механизме согласования происходит обнуление
этих сигналов таким образом, что выходной сигнал с сумматора сервопривода становится равным нулю. Таким образом происходит синхронизация
канала тангажа до включения его в режим стабилизации и запоминание
текущего значения угла тангажа. Автопилот готовится к безударному
включению для управления рулем высоты.
В режиме стабилизации угла тангажа рулевая машина подключается
для управления рулем высоты. Сигнал иД1> пропорционален разности
значений угла тангажа и балансировочного положения руля высоты на
ГВ
„,.
у
\
'-*-
— *• МС \-
РМ <5
»
Я
иаг*а
Г^Л«нг
[№_{—
и
У
Гт1
иск
Чтос
Ь
(-
-
I
/т
1
тг
^1
~
С
Рис. 9.1. Функциональная схема аналогового электромеханического автопилота угла
тангажа
268
момент включения режима стабилизации. Сигнал с выхода сумматора
сервопривода отключается от механизма согласования (контакт 1 размыкается). Любое отклонение самолета по углу тангажа До = (о — о 0 ) под
действием внешних возмущений от того угла тангажа « 0 , который имел
самолет в момент включения режима стабилизации, воспринимается
автопилотом как рассогласование, которое необходимо парировать. Закон
управления в этом режиме принимает вид
6?По = 1 Ч ш х + Ь 1 ) До.
(9.2)
Сигнал с гировертикали ГВ и„ поступает на вход механизма согласования МС, который формирует сигнал ид„, пропорциональный разности
(\> — о0). Сервопривод преобразует этот сигнал в перемещение вала рулевой
машины 8„ ". Как только сигнал обратной связи ижос уравновесит сигнал
с гировертикали и„, отработка руля высоты рулевой машиной прекратится
и руль остановится в некотором положении, пропорциональном возникшему рассогласованию (« — и0).
Отклонение руля высоты вызовет появление управляющего аэродинамического момента М25>, противоположного по знаку возмущению,
вызвавшему рассогласование (и — о0). Поэтому рассогласование будет
уменьшаться, а вместе с этим будет уменьшаться и сигнал с выхода МС
и Д и . Когда текущее значение угла тангажа о сравняется с требуемым
значением о 0 , сервопривод под действием сигнала обратной связи ижос
возвратит руль высоты обратно в балансировочное положение. Таким
образом, самолет вернется к тому значению угла тангажа, который он имел
в момент включения режима стабилизации.
Сигнал с ДУС и^ обеспечивает демпфирование продольных короткопериодических колебаний, как это было подробно описано при рассмотрении демпфера тангажа. Сигнал с тахогенератора ТГ рулевой
машины исос обеспечивает лучшие динамические характеристики сервопривода.
Пилот, воздействуя на рукоятку управления «Спуск-подъем», задает
управляющий сигнал иди„д, который суммируется с сигналом приращения
текущего угла тангажа механизма согласования иД1). При этом формируется сигнал рассогласования, пропорциональный (А о — А и зад ). Автопилот парирует это рассогласование, возникшее в результате управления,
так же как при рассогласовании (о — о 0 ), возникшем в результате внешнего
возмущения в режиме стабилизации.
Существуют два основных способа управления углом тангажа: «по
положению» рукоятки управления и «по скорости». В первом случае угол
тангажа самолета устанавливается пропорционально углу отклонения
рукоятки «Спуск-подъем». Во втором случае угол отклонения руля
высоты устанавливается пропорционально времени воздействия пилота на
гашетку «Спуск-подъем», т.е. ведется управление угловой скоростью
тангажа. В последнее время второй способ управления углом тангажа
с помощью автопилота на самолетах ГА не применяется.
269
гв
пи
лиг
//Ус/
•Щ ве р
»•
и&&зиЗ
С1
ив
РА(
г
•"
ц
У
|_
\
^
Уш1
Г
I Ш.с
КйПтг
СГ
дии
—
4
Рис. 9.2. Функциональная схема аналогового электрогидравлического автопилота
угла тангажа
Рассмотрим функциональную схему аналогового электрогидравлического автопилота угла тангажа (рис. 9.2). Такой автопилот имеет
жесткую обратную связь в сервоприводе. В состав автопилота входят те же
датчики текущих и заданных параметров, что и в электромеханическом
автопилоте. Так как усиление управляющего сигнала на рулевой агрегат
осуществляется малогабаритным полупроводниковым усилителем У, это
позволяет разместить его в электронном блоке вычислителя автопилота
ВАПъ вместе с сумматором сервопривода С и сумматором автопилота С1.
Обнуление сигнала угла тангажа осуществляется в блоке согласования БС,
который обычно является самостоятельным конструктивным блоком.
В режиме согласования в электрогидравлическом автопилоте нет необходимости обнулять сигнал обратной связи. Это связано с тем, что режим
стабилизации угла тангажа включается при стриммированном положении
руля высоты, когда шток рулевого агрегата находится в нейтральном
положении. Тогда согласование канала тангажа автопилота осуществляется только по сигналу текущего угла тангажа и„ с гировертикали ГВ.
Таким образом, в режиме согласования блок согласования БС запоминает
текущее значение угла тангажа самолета и0 аналогично тому, как это делал
механизм согласования МС электромеханического автопилота.
Работа электрогидра'влического автопилота угла тангажа в режимах
стабилизации и управления аналогична работе электромеханического
автопилота.
Управление продольным короткопериодическим движением самолета с
помощью автопилота угла тангажа. Рассмотрим процесс устранения
начального отклонения угла тангажа А о с помощью автопилота (рис. 9.3).
Отклонение автопилотом руля высоты 5В " создает управляющий момент
тангажа Мг8,. Отклонение угла тангажа от заданного значения сопровождается изменением угла атаки Да, равным в начальный момент времени
приращению угла тангажа Аи. Изменение угла атаки создает статический
момент устойчивости по углу атаки М 2 а , совпадающий по знаку с
270
управляющим моментом тангажа М^ и стремящийся повернуть продольную ось самолета к прежнему положению. Если собственное демпфирование самолета достаточно, то за счет динамического демпфирующего
момента М2ШЕ при подходе самолета к заданному положению момент
тангажа М г , равный сумме моментов М 2а , МгШг и М^, меняет знак. Это
обеспечивает плавный выход самолета на заданный угол тангажа.
Однако при быстром подходе к заданному углу тангажа самолет
вследствие своей инерционности и недостаточного собственного демпфирования может проскочить заданное положение, совершив вокруг него ряд
колебаний. Для предотвращения колебаний автопилот должен обеспечить
такое отклонение руля высоты, которое препятствовало бы переходу угла
тангажа через заданное значение. Для этого руль высоты должен пройти
через исходное положение раньше, чем угол тангажа, и создать момент,
тормозящий движение самолета во время приближения к заданному
значению угла тангажа. Такое тормозящее отклонение руля высоты
создается автопилотом по сигналу угловой скорости юг (рис. 9.4).
При возвращении утла тангажа к заданному значению о0 приращение
угла тангажа Аи и угловая скорость тангажа ю2 имеют разные знаки.
Сначала угловая скорость тангажа мала, а отклонение угла тангажа велико.
Поэтому момент руля высоты М^ и приращение угла тангажа До имеют
разные знаки. По мере уменьшения угла тангажа и возрастания угловой
ч) ля, \
АЛ
Ав
Рис. 9.3. Процесс устранения начального отклонения угла тангажа с помощью автопилота
ш.
Рис. 9.4. Процесс устранения начального
отклонения угла тангажа при наличии в
автопилоте сигнала, пропорционального
угловой скорости тангажа
271
скорости тангажа в момент времени ^ сигнал кИг шг становится равным
сигналу к^Ди, а затем начинает превосходить его, вызывая отклонение руля
высоты, тормозящее движение самолета.
Считается, что автопилот угла тангажа обладает требуемым качеством,
если переходный процесс, вызванный ступенчатым управляющим воздействием, не выходит из области допустимых значений показателей качества.
Такими показателями качества являются точность стабилизации угла
тангажа Д„ = |А1> — Аи зад |, величина перерегулирования угла тангажа ст„
и время регулирования угла тангажа 1^.г. Идеальный переходный процесс,
которому соответствуют оптимальные значения передаточных коэф* . *•
фициентов (к^ и 1сш ), закона управления автопилота угла тангажа (9.1)
имеет плавный апериодический вид (рис. 9.5).
Так как направление вектора скорости самолета изменяется под
действием сил, а не моментов, то сначала при отклонении руля высоты
автопилотом вектор скорости не поворачивается за продольной осью.
Вследствие этого увеличивается угол между продольной осью и вектором
скорости - угол атаки. Следствием увеличения угла атаки является появление нормальной силы, вызывающей поворот вектора скорости вслед за
поворотом продольной оси.
Процесс изменения угла тангажа во времени можно разделить на два
периода. Сначала происходит быстрое увеличение угла тангажа и соответственно этому - возрастание угла атаки. Затем в течение нескольких
секунд-медленное дотягивание угла тангажа и угла наклона траектории до
заданного значения и постепенное уменьшение угла атаки до нуля. Следует
а)А1Г
\ М (,
г
Рис. 9.5. Переходные процессы при оптимальных значениях передаточных
коэффициентов закона управления автопилота
272
Рис. 9.6. Процессы устранения автопилотом угла тангажа с жесткой обратной связью в сервоприводе внешнего
ступенчатого моментного возмущения
отметить, что после установления нового значения угла наклона траектории изменяется проекция силы тяжести самолета на направление, вектора
скорости, что приводит к установлению новой скорости на длиннопериодическом этапе движения.
Рассмотрим процесс устранения автопилотом угла тангажа с жесткой
обратной связью в сервоприводе внешнего ступенчатого моментного
возмущения (рис. 9.6). Под действием момента М2В самолет начинает
менять угол тангажа в направлении воздействия момента. Возникающая
при этом угловая скорость тангажа сог имеет одинаковый знак с приращением угла тангажа Аи. Под действием сигналов углового отклонения
и угловой скорости автопилот отклоняет рули высоты. Управляющий
момент тангажа Мг5 направлен в сторону, противоположную направлению внешнего момента. Момент тангажа Мг меняет знак, когда устанавливается равенство моментов Мгв, М28 и МгЮ , и обеспечивает торможение
самолета при его подходе к установившемуся значению приращения угла
тангажа Аи у с т . После окончания переходного процесса, когда угловая
скорость и момент демпфирования становятся равными нулю, управляющий момент тангажа уравновешивает внешний возмущающий момент
М2В.
Так как отклонение рулей высоты пропорционально отклонению угла
тангажа самолета, то для сохранения в установившемся режиме постоян,„АПо.
ного отклонения рулей высоты (ов )уст, компенсирующего внешний
возмущающий момент, необходимо иметь постоянное отклонение угла
тангажа Ао у с т . Поэтому
2
ов г, .
т. *
"в. уст
рУ
к ' ,АП«
в
= —
1У1_гв =
= т
ГП
_~ЛП
=
-М
г 8 Ьа -Т- бв.уст,
5 вуст = к и Аи у с т .
С
/п ^\
(9.3)
(9.4)
Из соотношений (9.3) и (9.4) получим следующее значение для установившегося приращения угла тангажа:
М„
2
Таким образом, величина Аи у с т является статической ошибкой регулирования, возникающей под действием возмущающего момента М 2В . Эта
величина пропорциональна возмущающему моменту и обратно пропорциональна передаточному коэффициенту автопилота по углу тангажа к и .
Автопилот угла тангажа с жесткой обратной связью в сервоприводе
является статическим по отношению к внешнему ступенчатому возмущающему моменту тангажа. Статическая ошибка регулирования является
следствием жесткой обратной связи, устанавливающей пропорциональность между отклонением угла тангажа и отклонением рулей высоты. Если
на самолет воздействует ступенчатый момент, то в установившемся режиме
273
он может компенсироваться лишь постоянным отклонением рулей высоты
автопилотом.
Рассмотрим процесс устранения автопилотом угла тангажа с жесткой
обратной связью в сервоприводе внешнего ступенчатого силового возмущения Р ув , вызванного, например, уменьшением массы самолета на
величину Дт вследствие выгорания топлива. Уменьшение массы вызовет
поворот вектора скорости вверх. При этом произойдет уменьшение угла
атаки и уменьшение подъемной силы. Установится такое значение угла
атаки, при котором обеспечится равенство подъемной силы новому значению силы тяжести самолета. Уменьшение угла атаки приведет к уменьшению момента статической устойчивости М20, что вызовет поворот продольной оси самолета и изменение угла тангажа. Автопилот среагирует на
это изменение отклонением рулей высоты. Установится такое отклонение
рулей высоты, при котором момент Мш при изменившемся угле атаки
уравновесит управляющий момент М^. Отклонение рулей высоты автопилотом угла тангажа с жесткой обратной связью в сервоприводе
возможно лишь при наличии рассогласования по углу тангажа. Статическую ошибку можно определить из следующего соотношения:
А »ч
1 т*в 2Дт§
у« ~~ ~ ъ—
—
Таким образом, статическая ошибка прямо пропорциональна изменению массы самолета и обратно пропорциональна передаточному коэффициенту автопилота по углу тангажа к„.
Важным вопросом при исследовании динамики самолета, управляемого
автопилотом угла тангажа, является оценка влияния ветровых возмущений
на вертикальную перегрузку. Автопилот угла тангажа при определенных
сочетаниях параметров может увеличить ветровую перегрузку. Это
объясняется тем, что автопилот, стабилизируя ось самолета в пространстве, практически лишает самолет возможности изменять угол атаки
и уменьшать приращение перегрузки за счет поворота вокруг центра масс.
С другой стороны, автопилот может
и уменьшить ветровую перегрузку,
так как включение автопилота увеличивает затухание колебаний по сравнению со свободным самолетом.
Однако в любом случае автопилот
угла тангажа увеличивает собственную частоту продольных короткопериодических колебаний самолета.
\а
Это приводит к снижению уровня
спектральной плотности угловых коРис. 9.7. Процесс устранения автолебаний в области низких частот и
пилотом угла тангажа вертикальограничению полосы пропускания
ного ветрового возмущения
контура стабилизации угла тангажа.
274
В результате среднее квадратическое отклонение нормальной перегрузки
существенно снижается, что приводит к уменьшению неконтролируемого
расхода ресурса конструкции самолета при полете в турбулентной атмосфере.
Рассмотрим процесс устранения автопилотом угла тангажа вертикального ветрового возмущения, имеющего скорость \Уу (рис. 9.7). При
попадании в вертикальный восходящий поток воздуха угол атаки самолета
практически мгновенно изменяется на величину Аа ж = ш у /У°. Угол
тангажа Аи и угол наклона траектории А6 = (Ди — Аа + Аа ж ) сначала
сохраняют свои значения. Однако ввиду увеличения угла атаки увеличивается подъемная сила самолета, разворачивающая вверх вектор путевой
скорости самолета.
Момент статической устойчивости Мш поворачивает продольную ось
самолета навстречу ветру. Оба эти явления уменьшают угол атаки. Начинают возрастать углы тангажа и наклона траектории. Автопилот реагирует
на изменение угла тангажа и отклоняет рули высоты. Угол тангажа
возвращается к прежнему значению. Самолет приобретает скорость ветра
и сохраняет значения углов атаки, тангажа и отклонение рулей высоты,
которые были до момента попадания самолета в вертикальный поток
воздуха. Таким образом, постоянная нормальная составляющая ветра не
влияет на точность стабилизации угла тангажа автопилотом. Однако
приращение угла наклона траектории изменяет исходный режим полета.
Особенности законов управления автопилотов угла тангажа. Для уменьшения статических ошибок автопилота угла тангажа и обеспечения его
астатизма применяются три основных способа. Первый способ основан на
интегрирующих свойствах сервопривода, охваченного изодромной обратной связью. Второй способ предполагает введение в закон управления
автопилота сигнала, пропорционального интегралу от рассогласования по
углу тангажа. Третий способ предусматривает использование дополнительного параллельного интегрирующего сервопривода.
Закон управления автопилота угла тангажа с изодромной обратной
связью в сервоприводе имеет следующий вид:
Т„ р + 1
= кЮг югг + к„ АО,
(9.5)
где Ти постоянная времени изодрома сервопривода.
Изодромную обратную связь можно получить пропусканием сигнала
позиционной обратной связи по отклонению вала рулевой машины высоты
через КС-цепочку, имеющую передаточную функию реального дифференцирующего звена \Укс(р) = Т и р/(Т„р + 1).
Большее распространение получили схемы сервоприводов, реализующих изодромную обратную связь путем суммирования сигнала, пропорционального отклонению вала рулевой машины высоты, взятого с
обратным знаком, и этого же сигнала, пропущенного через электромеханизм согласования с передаточной функцией апериодического звена
+1).
275
В структурной схеме аналогового электромеханического автопилота
угла тангажа с изодромной обратной связью в сервоприводе (рис. 9.8) на
выходе сумматора 4 имеем
Т„Р+1
С.АП»
о„ = -
Т„Р+1
(9.6)
На выходе сумматора 2 имеем А = До — Аи з а д . На выходе сумматора
5 имеем закон управления (9.6). Таким образом обеспечивается стабилизация и управление углом тангажа самолетов Ил-62 и Ил-86 с помощью
системы САУ-1Т-2.
„
-Аш>
Если автопилот .отклоняет руль высоты на угол ов , то сигнал
изодромной обратной связи будет изменяться по экспоненциальному
закону (рис. 9.9):
АШ _ . / т
где к0.с- передаточный коэффициент датчика обратной связи, воспринимающего
отклонение вала рулевой машины высоты.
При постоянном отклонении рулей высоты сигнал изодромной обратной связи с течением времени стремится к нулю. Из этого следует, что
постоянное отклонение рулей высоты, потребное для компенсации постоянных моментов, при наличии изодромной обратной связи не приводит
к появлению постоянного сигнала на входе автопилота и появлению
статической ошибки регулирования угла тангажа.
При отклонении руля высоты по закону прямоугольного импульса
сигнал обратной связи и0 с будет состоять из двух участков экспонент. Если
постоянная времени Ти имеет достаточное значение и превышает в
несколько раз длительность импульса т, то за время импульса сигнал
обратной связи уменьшится незначительно и по форме будет близок
к импульсу отклонения руля. Отсюда следует, что сигнал изодромной
обратной связи с большой постоянной времени при быстрых движениях
руля будет близок к сигналу жесткой обратной связи. Движение самолета
Рис. 9.8. Структурная схема аналогового электромеханического автопилота угла
тангажа с изодромной обратной связью в сервоприводе
276
Об,
Час
РЛ,
О,
Рис. 9.9. Изменение сигнала изодромной обратной связи автопилота угла
тангажа
Рис. 9.10. Процесс устранения автопилотом угла тангажа с изодромной обратной
связью в сервоприводе внешнего ступенчатого моментного возмущения
по углу тангажа является быстрым движением, совершающимся в течение
1-2 с. Это движение обеспечивается отклонением рулей высоты на короткие отрезки времени длительностью в десятые доли секунды. Постоянная
времени изодромной обратной связи Ти = 2 -=- 3 с обеспечивает в этом
случае сигнал обратной связи, аналогичный тому, какой создает жесткая
обратная связь. Поэтому процесс устранения начального отклонения угла
тангажа самолета при помощи автопилота с изодромной обратной связью
практически не отличается от аналогичного процесса, обеспечиваемого
автопилотом с жесткой обратной связью (см. рис. 9.4).
Процесс устранения внешнего ступенчатого моментного возмущения
автопилотом угла тангажа с изодромной обратной связью в сервоприводе
(рис. 9.10) поначалу совпадает с процессом компенсации такого момента
автопилотом с жесткой обратной связью. Накопленное отклонение рулей
высоты, создающих управляющий момент для компенсации внешнего
момента, в начале процесса вызывает подачу на вход сервопривода сигнала
изодромной обратной связи. Затем этот сигнал постепенно уменьшается,
что вызывает дополнительное отклонение рулей высоты и возвращение
самолета к опорному значению угла тангажа. С течением времени устанавливается отклонение рулей высоты (5В )ус1, при котором управляющий
момент (М^Дст полностью компенсирует внешний момент М 2 В . Тогда
исчезает сигнал изодромной обратной связи.
Рассмотрим второй способ обеспечения астатизма автопилота угла
тангажа. Закон управления автопилота, реализующего принцип пропорционально-интегрально-дифференциального управления (ПИД-управления), имеет вид
277
5В
= кт са2 + к^, Аи Н
Аи,
(9.7)
Р
где кг -передаточный коэффициент по интегралу рассогласования угла тангажа.
Интегральная составляющая закона управления (9.7) может быть
получена путем пропускания сигнала АО через электромеханический
интегрирующий привод с передаточной функцией \УИП (р) = К|ц / р. Структурная схема аналогового электромеханического автопилота угла тангажа
с ПИД-управлением представлена на рис. 9.11.
Покажем, что закон управления с изодромной обратной связью (9.5)
эквивалентен закону управления с ПИД-управлением. Для этого поделим
левую и правую части (9.5) на Т я р/(Т и р + 1):
1
Откуда с учетом того, что о> 2 /р = Аи, получим
8В " = кЩг <о2 + к„ н
кш
Т.. '
Аи + ^~-Аи = к.ш- ш22+ Ц,,До + —Аи,
ТИр
р
Ки
'" ~~ Т„
Таким образом, процесс устранения внешнего ступенчатого моментного
возмущения автопилотом угла тангажа с ПИД-управлением аналогичен
рассмотренному процессу для автопилота угла тангажа с изодромной
обратной связью в сервоприводе (см. рис. 9.10).
Рассмотрим третий способ обеспечения астатизма автопилота угла
тангажа с использованием дополнительного параллельного интегрирующего сервопривода. Закон управления рулем высоты имеет вид
АПи
где 5В
формируется согласно (9.1).
Интегрирующая составляющая закона управления (9.8) 8В получается
путем пропускания сигнала Аи через электромеханический привод устройства триммерного эффекта УТЭ с передаточной функцией \Уутэ (р) =
= Р{и Цо/р, где Р{„ - нелинейное звено с зоной нечувствительности.
Структурная схема аналогового электрогидравлического автопилота угла
тангажа с дополнительным параллельным интегрирующим сервоприводом
(рис. 9.12) соответствует режиму стабилизации и управления углом тангажа
с помощью системы АБСУ-154.
Как только статическая ошибка Аи превысит порог зоны нечувствительности звена Р|„ УТЭ, происходит отработка механической проводки
управления рулем высоты. Закон управления (9.8) эквивалентен закону
278
Рис. 9.11. Структурная схема аналогового электромеханического автопилота угла
тангажа с ПИД-управлением
с ПИД-управлением и обеспечивает астатизм по отношению к внешнему
моменту тангажа.
Цифроаналоговые автопилоты угла тангажа. В последнее время наблюдается тенденция к постепенной утрате самостоятельной роли задачи
автоматического управления и стабилизации угла тангажа. Это обусловлено переходом к непосредственному автоматическому управлению продольным движением центра масс самолета. При управлении продольным
траекторным движением самолета контуры управления углом тангажа
и нормальной перегрузкой являются внутренними. Управление движением
центра масс самолета через контур нормальной перегрузки имеет ряд
преимуществ. Эта задача может решаться только автоматическими
средствами, так как режима ручного управления нормальной перегрузкой
по приборам не существует.
Рис. 9.12. Структурная схема автопилота угла тангажа с параллельным интегрирующим сервоприводом
279
Сигналы и
разобые
^.
от други
датчика в
и систем
тс
Чбв
у
Шг ^
V ж
БВУП
гг
Пу
с
- \ >
ио.с
Г*
II
ДОС
БУ
?
у
С/18*
°А8е
^
Рис. 9.13. Функциональная схема цифроаналогового автопилота угла тангажа и нормальной перегрузки
Автопилот угла тангажа и нормальной перегрузки (АПшу)-средство
автоматического управления, обеспечивающее управление и стабилизацию
продольного короткопериодического движения самолета на всех этапах
полета путем отклонения рулей высоты при возникновении рассогласования между значениями текущего приращения и заданного приращения
нормальной перегрузки, причем заданное приращение нормальной перегрузки получается как разность между значениями приращений текущего
и заданного значений угла тангажа.
Простейший автопилот угла тангажа и нормальной перегрузки реализует следующий закон управления рулями высоты:
= к со2
1с Д П у (Ап у -Ап у з а д )
(9.9)
где А п у , Ап узад -соответственно текущее и заданное значение приращения нормальной перегрузки; Кд„у-передаточный коэффициент по приращению нормальной
перегрузки, показывающий, на какой угол должны отклониться рули высоты при
возникновении рассогласования между значениями приращения текущей и заданной
нормальных перегрузок в 1§; Кдп -передаточный коэффициент по углу тангажа
в контуре нормальной перегрузки, определяющий, как должна измениться нормальная перегрузка при возникновении рассогласования между значениями приращений
текущего и заданного углов тангажа в 1°.
Управление углом тангажа через контур нормальной перегрузки
осуществляется цифроаналоговыми автопилотами (рис. 9.13). Автопилот
имеет аналоговый сервопривод. Датчиком текущих параметров движения
самолета является инерциальная навигационная система ИНС, вырабатывающая в виде последовательного биполярного кода сигналы, пропорциональные сог, и, у и Ап у . Эти сигналы, а также сигналы и разовые команды от
других датчиков и систем принимает цифровой блок вычислителя управления полетом БВУП. В этом блоке осуществляется обнуление и запоминание
текущего значения угла тангажа в режиме согласования и формирование
аналогового управляющего сигнала иств на вход сервопривода в режиме
стабилизации угла тангажа. Режима управления углом тангажа от рукояток
280
управления в современных цифроаналоговых автопилотах, как правило,
нет.
Согласование угла тангажа происходит в режиме совмещенного
управления. Этот режим предназначен для оперативного вмешательства
пилота в автоматическое управление самолетом. При включении режима
совмещенного управления автопилот осуществляет стабилизацию угла
тангажа, если усилие на колонке штурвала или ее перемещение не превышает пороговых значений. Вмешательство пилота фиксируется по условию
превышения усилия или перемещения пороговых значений в течение
определенного времени. Тогда режим стабилизации угла тангажа отключается и происходит согласование угла тангажа.
Закон управления цифроаналогового автопилота в режиме стабилизации угла тангажа имеет вид:
и - Р.оД
1 — сок у
(9.10)
^
СО8у
Составляющая закона управления по угловой скорости тангажа
г
а в обеспечивает демпфирование короткопериодических колебаний самолета по тангажу. Передаточный коэффициент кШг корректируется по
режимам полета в функции числа М.
Составляющая закона управления по избыточной нормальной переДп у
грузке а в осуществляет управление углом тангажа через контур нормальной перегрузки. Передаточный коэффициент к Дп изменяет размерность
управляющего сигнала. Нелинейное звено с насыщением РдПу ограничивает
формирование слишком больших управляющих сигналов по перегрузке.
Аналогичным образом нелинейное звено с насыщением Ри ограничивает
диапазон изменения угла тангажа. Интегродифференцирующий фильтр
с постоянными времени ТИ1 и Т02 обеспечивает требуемое качество
переходных процессов.
Составляющая закона управления по углу крена а в устраняет потерю
подъемной силы и просадку самолета по высоте при разворотах.
281
| Коррекция
Рис. 9.14. Структурная схема цифроаналогового автопилота угла тангажа и нормальной перегрузки
Составляющая закона управления по продольной балансировке Ствал
обеспечивает устранение статических ошибок путем интегрирования рассогласования между значениями текущей и заданной избыточных перегрузок с учетом положения закрылков. Одновременно формируется управляющий балансировочный сигнал на отклонение стабилизатора. Нелинейное звено Рф ограничивает диапазон управляющих сигналов на отклонение
стабилизатора и определяет логику формирования управляющих балансировочных воздействий на руль высоты и стабилизатор. Если сигнал на
интеграле превышает определенный уровень и держится более определенного времени, то выдается сигнал на управление стабилизатором. В
противном случае рассогласование устраняется посредством руля высоты.
Изодромное звено с постоянной времени Т0мж корректирует управляющие
сигналы на руль высоты и стабилизатор при движении закрылков.
Структурная схема цифроаналогового автопилота угла тангажа,
реализующего закон управления (9.10), представлена на рис. 9.14. Так
работает вычислительная система управления полетом ВСУП самолета
Ил-96. Аналогичным образом формируется закон управления ВСУП в
режиме стабилизации угла тангажа на самолете Ту-204. Отличие состоит
в том, что балансировочный сигнал на управление стабилизатором
формируется в АСШУ-204.
Влияние отказов и характеристик элементов автопилота угла тангажа на
управление продольным движением. Пассивные отказы автопилота угла
тангажа в контуре сервопривода приводят к потере автоматической
стабилизации и управления углом тангажа. Вал рулевой машины или шток
рулевого агрегата остаются неподвижными при любых отклонениях текущего угла тангажа от заданного, что может быть замечено пилотом по
показаниям авиагоризонта или индикатора усилий в проводке управления
рулем высоты.
Активные отказы автопилота угла тангажа в контуре сервопривода или
по сигналам угловой скорости и угла тангажа приводят к перекладке рулей
282
высоты вследствие отработки вала рулевой машины или штока рулевого
агрегата на максимальный ход. Это может вывести самолет на недопустимые нормальные перегрузки.
Пассивный отказ по сигналу угловой скорости тангажа приводит
к уменьшению эффективности демпфирования продольных короткопериодических колебаний при стабилизации угла тангажа. Это может
вызвать раскачку самолета по углу тангажа. Пассивный отказ по сигналу
текущего угла тангажа приводит к потере автоматической стабилизации
угла тангажа и автопилот начинает работать как демпфер тангажа. Отказы
автопилота угла тангажа по цепи согласования ненулевых сигналов приводят к возможности грубого включения силовой части автопилота, рывкам
на рулях высоты и возникновению недопустимых перегрузок.
Использование автопилотов угла тангажа для продольной балансировки самолета при наличии постоянно действующего внешнего момента
может привести к нежелательным последствиям при возникновении отказа
в автопилоте. Отключение автопилота сопровождается возвращением
штока рулевого агрегата или вала рулевой машины в нейтральное положение, что может привести к резкой перебалансировке самолета. Поэтому для
автоматической продольной балансировки обычно используют специальные схемы управления триммированием или эффектом триммирования
через интегрирующий сервопривод. Это обеспечивает мягкое переключение
на ручное управление при отказе автопилота. Тогда требование к астатизму
контура управления углом тангажа через автопилот отсутствует.
Влияние погрешностей измерителей угла тангажа и угловой скорости
тангажа проявляется в статических ошибках по углу тангажа. Дрейф нуля
сигнала угловой скорости тангажа ^, характерный для аналоговых
автопилотов, компенсируется сигналом отклонения по углу тангажа
Статическая ошибка находится из соотношения
Ю
7.
Ао у с т = Ао з а д - Ли(оо) = — ^.
К
1)
Если сигнал, пропорциональный угловой скорости, пропускается через
изодромное звено, то автопилот астатичен по отношению к дрейфу нуля
Со . Одновременно это позволяет избавиться от статической ошибки,
возникающей при развороте самолета с постоянным креном, так как
датчик угловой скорости измеряет сумму проекций скоростей изменения
эйлеровых углов.
Зона нечувствительности в сервоприводе также вызывает статическую
ошибку, так как реакция сервопривода будет отсутствовать до тех пор,
пока не будет выполнено условие
где ^сп- характеристика нечувствительности сервопривода.
283
Пороговое значение управляющего сигнала
( А и - Аи з а д )
=•
Ссп
*Ч,К.у
Разрегулировки передаточных коэффициентов закона управления,
характерные для аналоговых автопилотов, приводят к снижению качества
стабилизации и управления углом тангажа. Уменьшение передаточного
коэффициента ки делает процессы управления более затянутыми. Недопустимое увеличение передаточного коэффициента к„ приводит первоначально к более быстрому выходу самолета на заданный угол тангажа.
Однако затем процесс может «сорваться» и новый рост становится
затянутым.
Уменьшение передаточного коэффициента кШг делает процесс управления колебательным. Увеличение передаточного коэффициента 1сШг приводит
к слишком сильному демпфированию и затянутости процесса.
9.1.2. Моделирование управления углом тангажа
Реакция самолета на управляющие воздействия автопилота угла тангажа.
Рассмотрим модель продольного короткопериодического движения самолета (3.19), управляемого автопилотом угла тангажа с законом управления
(9.1). Управляющее воздействие формируется пилотом путем отклонения
рукоятки «Спуск-подъем». Модель содержит уравнение состояния, уравнения выхода и входа, а также закон управления автопилота:
х„к (I) = А пг х т (I) + В&.1& (I),
(9.11)
Ушс(1) = хП1[(1),
(9.12)
ии*) = 8*П"(1},
(9-13)
|>»д(1),
где
Да (I)
Аи (I)
О
284
О
(9-14)
АПи
л,
0
т-АПи
, Епк = -Ц,.
Подставим уравнения выхода (9.12), входа (9.13) и закон управления
(9.14) в уравнение состояния (9.11) и выполним преобразование Лапласа
при нулевых начальных условиях:
(р! - А пк - В^0а) Упк (р) =
(р) .
Получим вектор передаточных функций замкнутой системы «самолет автопилот угла тангажа» по параметрам продольного короткопериодического движения на управляющее воздействие по углу тангажа
«АГЪ, ,
У пк (Р)
, ,
.
тАПич-хт.»
д-АПи
=Ф
Переходная матрица состояния по параметрам продольного короткопериодического движения самолета при включенном автопилоте угла
тангажа
ФГ(Р) = (Р! - А„, - щдО-1 = («СГ1 •
Элементами вектора \УПК " (р) являются передаточные функции самолета
по соответствующим параметрам вектора выхода Упк(р). Он совпадает
в рассматриваемом случае с вектором переменных состояния по параметрам продольного короткопериодического движения Хпк (р) на управляющее воздействие по углу тангажа Аи эад (р)
Переходная матрица состояния
(9.15)
Определитель матрицы
Р~
Р - аа,а
О
О
Р
(9.16)
285
Присоединенная матрица
а
Р(Р- а,а)
(9.17)
а
а
о,«,г(Р ~ а,а)
Подставим выражения для определителя (9.16) и присоединенной матрицы (9.17) в (9.15):
га„8, 1>'Р
Р(Р~ а а.а)
АПи , ч
А
А
(р)
А АПо , ч
А
А
(р)
а
а,а)
АПи / ч
(р)
АП« , <
. АПо , *
(Р)
(Р)
~а<ог,8. т/ ~
»-!
, . АПо / ч
/А
лп
д
АПи ( р )
(р)
п
(1 {!' '••г
и\Г
Ш_,Ш_
Ш
О
дАПи(р)
1
К
Ч
а
а
П /ЛА А П 1 1 /
ш^ ~ а,шI шI,а^/
Л
(Р)
Тогда вектор передаточных функций определяется следующим образом:
АШ, ,
А
А
А
А
(р)
АПи .- ,
(р)
ААП»
286
ИЛИ
К
АГЬ
г>
2
-и И
АШ)
г,
<НР)= -ВгР+ В 'Р - ,
з +А
р
*
АПи
2
р + АГР + А0
(9.18)
АРи
т>АПи
Р
<'«(?) = - - „ ° дп - — ,
3
АП
ЛШ
АШ
р +А У+А Р+А
о
АПи
о
АПи
2Р
<Нр) = - ' - ,
р
_АПи
,
З + А АПу + А ЛПи р+ дЛП,
т|АПи
,
(9Л9)
(9-20)
„АПи
где В2 = - аИ1Лки, В, = аЩ1Лаа,А, В0 = - а ш А а а т д и .
Сравнивая выражения для передаточных функций (9. 18) -(9.20) с выражениями для передаточных функций замкнутой системы «самолет-демпфер тангажа», приходим к выводу, что автопилот угла тангажа изменяет
структуру передаточных функций и характеристики образующих их звеньев. Сворачивая структурную схему замкнутой системы «самолет -автопилот угла тангажа» (рис. 9.15, а), получим передаточную функцию (9.20).
Рассмотрим условия устойчивости замкнутой системы «самолет -автопилот угла тангажа» по критерию Гурвица:
л АПи
!
Л
0
= а т г ,5, а о,шЛ,а^>0,
А
"
А2АП" = 2Ь{Г = - ашл - аа>а - а^к^ > 0 ,
(9.21)
Правильным выбором передаточных коэффициентов ^ и к„ добиваются выполнения условий (9.21), а также обеспечивают требуемые запасы
устойчивости.
Аналогичным образом могут быть получены передаточные функции
и условия устойчивости замкнутой системы «самолет -автопилот угла
тангажа» с изодромной обратной связью в сервоприводе и законом
управления (9.5). Тогда модель содержит уравнение состояния (9.11),
уравнения выхода (9.12) и входа (9.13), а также закон управления, который
представляется в виде
озад,
_АПи
где Опе — , —
г « —
|.
(9-22)
,Й7
ЛО /
ЛГ&?
1
«иг
бб
К%(Твр + 1)
ЛШг
т?рг+гыар+1
1
Р
Д1Г
1<Ы2
Рис. 9.15. Структурная схема замкнутой системы «самолет - автопилот угла тангажа»:
а- автопилот с жесткой обратной связью в сервоприводе; б-автопилот с изодромной обратной
связью в сервоприводе
Реакция самолета на ступенчатое отклонение руля высоты пилотом
была рассмотрена в подразделе 3.3.2. Изменение этой реакции при включении в проводку управления руля высоты демпфера тангажа показано
в 6.1.2.
Рассмотрим реакцию замкнутой системы «самолет - автопилот угла
тангажа» на ступенчатое отклонение пилотом рукоятки «Спуск -подъем».
На этапе короткопериодического движения сформируется новое установившееся значение угла тангажа
,АПи
„
В,
АА П и
АО
Установившиеся значения угловой скорости тангажа и угла атаки
примут нулевые значения:
(Ашг)уст = 11т {рАизад (р) \У&- (?)} = 0,
р-О
Аауст = 11т {рАозад (р) АУ^~ (р)} = 0.
р-О
288
Переходный процесс определяется переходной функцией
л
„АПи
, „АПи
Ди^ - В^КВ, Р рЗ+А^У + АГр + АГ
Пользуясь изложенным в 3.1.2 методом Линна, можно определить
корни характеристического уравнения
Среди этих корней, как правило, один оказывается действительным,
а два -комплексными сопряженными. Тогда переходную функцию (9.23)
можно привести к простому виду:
Оригинал функции (9.24) находят с помощью обратного преобразования Лапласа
ы
Аи (I) = Аеа1 81П (ю1 + ф) + Ве + С ,
где А = -
В=
Г(Д + а)2 + со2Т/2
2
2
1/2
о(а + ш ) Ца
Ца-Ъ)
- Ь)2 + со2] '
ы-а
Ь [(Ь - а)2 + со2]
[
агс(§
СО
2
2
Ь(а + со )
СО
агс!д
а+и
а -Ь
агсг§
О)!
].
а^
Аналогичным образом определяют переходные процессы по угловой
скорости тангажа и углу атаки.
Реакция замкнутой системы «самолет-автопилот угла тангажа» на внешние возмущения. Рассмотрим модель продольного короткопериодического
вынужденного движения самолета, управляемого автопилотом угла тангажа, при наличии внешних возмущений:
хпх (I) = А пк х пк (1) + Щ.ШЙ, (I) + В'Хк (1),
(9.25)
У„к(1) = хпк(1),
(9.26)
ии*) = О*),
(9-27)
...
^^АПо
/,-.
5АПи
„ (1) = ВПК у„к(1)-
/л л 0 \
л
(9-28)
Вектор входа <„(!) и матрица входа ВпК определены выражениями
(3.148) и (3.149). Подставим уравнение выхода (9.26) и закон управления
(9.28) в уравнение состояния (9.25) и возьмем преобразование Лапласа при
нулевых начальных условиях:
(р! - А пк - В^В^) У пк (р) = В»КП»К (р).
10 Зак. 948
289
Получим матрицу передаточных функций замкнутой системы «самолет-автопилот угла тангажа» по параметрам продольного короткопериодического движения самолета на внешние возмущения
= (р! - А пк
где переходная матрица Ф
и
(р) определена выражениями (9. 15) -(9. 17).
Рассмотрим вектор передаточных функций по параметрам продольного
короткопериодического движения на внешний момент тангажа Ат гв :
А
АПи , ч
А
А
АПо , ,
(р)
(р)
А
АПо , -.
(р)
или
,-АПи
С,
р
I АПо
+ А2
э
АПо 22 .
р3 + А 2
д
?
р2 +
АПи
!
» АПо
(9.29)
р + А0
л АПи
,
. АПи
(9.30)
р + А, р + АО
АПи
1 ,
л АПи т .
л АПи
. АПи
(9.31)
р3 + А 2 р2 + А, р + АО
где С2АП1> = аЙ1^_, С*Ш =' - ащ ^а^, В*"" = - ащ _„ аа>И .
Сравнивая выражения для передаточных функций (9.29)-(9.31) с выражениями для передаточных функций свободного самолета на внешний
момент тангажа, приведенными в табл. 3.1, приходим к выводу, что
автопилот угла тангажа изменяет структуру передаточных функций и характеристики образующих их звеньев. Рассмотрим реакцию замкнутой
системы на импульсный внешний момент тангажа Ат гв (I) = 5 (I) Атгв, т. е.
Дтгв(р) = Ат гв . На этапе короткопериодического движения произойдет
астатическое регулирование угла тангажа:
Аи уст = Нт {рАтгв(р)\^дип»(р)} =
290
,АПо -
Следовательно, автопилот угла тангажа с законом управления (9.1)
является астатическим по отношению к внешнему импульсному моментному возмущению по тангажу.
Если внешний момент тангажа ступенчатый Ат2В (г) = 1 (I) Ат^,
Дтм(р) = Ат2В/р, то управление будет происходить со статической ошибкой:
г |рАтг
л СТ = Ьт
<
Ди„
Р-о
Р
р
З
По
АО
'ХА'
т.е. автопилот угла тангажа с законом управления (9.1) является статическим по отношению к внешнему ступенчатому моментному возмущению по тангажу. Для уменьшения статической ошибки необходимо
увеличивать передаточный коэффициент 1с„.
Аналогичным образом могут быть получены передаточные функции
и исследована реакция на внешние возмущения для замкнутой системы
«самолет-автопилот угла тангажа» с законом управления (9.5). Такой
автопилот обеспечивает астатическое управление при ступенчатом моментном возмущении.
9.2, АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ
И УПРАВЛЕНИЕ УГЛОМ КРЕНА
9.2.1. Автопилоты угла крена
Устройство и работа. Самолет как объект управления статичен в быстром боковом короткопериодическом движении при действии внешнего
момента крена или бокового ветра. Ручное управление углом крена пилот
осуществляет, воздействуя на колонку штурвала и наблюдая при этом за
изменением угла крена по указателю авиагоризонта. Удерживая элероны
в отклоненном положении, пилот стабилизирует крен или изменяет его
соответствующим образом. Для освобождения пилота от этой задачи
служит автопилот угла крена.
Автопилот' угла крена (АЩ)-средство автоматического управления,
обеспечивающее управление и стабилизацию быстрого бокового короткопериодического движения самолета на всех этапах полета путем отклонения элеронов при возникновении рассогласования между значениями текущего и заданного углов крена.
Ю*
291
Простейший автопилот утла крена реализует следующий закон управления элеронами:
АПу
\
I 1 /
' ~—
— Л-,.,
V **л„
гл ~
4- л.у
к ^(V
у
5^
\
V(зад/)
I
/г\ т^\
(9
л2)
\-**^&,)
где 8Э т-автоматическое отклонение элеронов от балансировочного положения
автопилотом угла крена; у, у,ад- соответственно приращения текущего и заданного
значений угла крена; Ц-передаточный коэффициент по углу крена, определяющий,
на какой угол должны отклониться элероны при возникновении рассогласования
между значениями текущего и заданного угла крена в 1°.
Другими словами, автоматическое отклонение элеронов от балансировочного положения автопилотом утла крена пропорционально угловой
скорости крена и разности текущего и заданного утла крена.
Исполнительные устройства сервоприводов автопилотов угла крена
включаются по параллельной схеме в механическую проводку управления
элеронами в прямых обратимых системах управления и по последовательной или параллельной схеме в бустерных и электродистанционных системах управления. При воздействии пилота на штурвал автопилот выключается и освобождает механическую проводку управления элеронами. Автопилоты утла крена бывают электромеханическими и электрогидравлическими.
В состав автопилота (рис. 9.16) входят датчик угловой скорости крена
ДУС, датчик угла крена-гировертикаль ГВ, задатчик утла крена-рукоятка
управления РУ «Крен», механизм согласования МС и сервопривод элеронов СШ3. Механизм согласования вместе с сумматором сервопривода
образует канал элеронов вычислителя автопилота ВАПу.
Автопилот угла крена работает в трех режимах: согласования, стабилизации и управления углом крена. В режиме согласования происходит
запоминание текущего значения угла крена и обнуление сигнала рассогласования крена на входе сервопривода. Рулевая машина элеронов не включена. Так как включение автопилота производится в тот момент, когда
Рис. 9.16. Функциональная схема аналогового электромеханического автопилота
угла крена
292
самолет сбалансирован по моментам крена и элероны находятся в балансировочном и близком к нейтральному положению, обнуления сигнала
обратной связи рулевой машины, как правило, не требуется. На вход
механизма согласования с гировертикали поступает сигнал иу, пропорциональный текущему значению угла крена у ф 0. Электромеханическая следящая система механизма согласования обнуляет этот сигнал таким образом, что к моменту включения режима стабилизации угла крена сигнал на
входе сервопривода равен нулю и автопилот готов к безударному включению для управления элеронами.
В режиме стабилизации угла крена рулевая машина включается в
управление элеронами. Размыкается электромеханическая следящая система согласования и на вход сервопривода поступает сигнал, пропорциональный отклонению самолета Ау = (у — у 0 ) от того угла крена у0, который он имел в момент включения режима стабилизации. Если значение у 0
невелико и не превышает 5-6°, то автопилот приводит самолет к горизонтальному полету и начинает стабилизировать угол курса (об этом подробнее в следующем параграфе). В противном случае стабилизируется угол
крена.
Закон управления (9.32) в этом режиме принимает вид
5*Пу = кШгСох + к у Ду.
(9.33)
Сигнал иду, пропорциональный разности (у — у 0 ) поступает на сервопривод, который отрабатывает элероны до тех пор, пока сигнал обратной
связи с датчика обратной связи рулевой машины ДОС ижос не уравновесит
сигнал иДу. Роль в этом процессе сигнала иш с ДУС была подробно
рассмотрена при изложении принципа действия демпфера крена. Отклонение элеронов вызовет появление управляющего аэродинамического момента М х 5 , противоположного по знаку возмущению, вызвавшему рассогласование °(у — у0). Поэтому рассогласование будет уменьшаться, а вместе
с этим и сигнал с выхода МС и Ду . Когда текущее значение угла крена
у сравняется с требуемым значением у 0 , сервопривод под действием
сигнала обратной связи ижос возвратит элероны обратно в балансировочное
положение. Таким образом, самолет вернется к тому значению угла крена,
который он имел в момент включения режима стабилизации.
Пилот, воздействуя на рукоятку «Крен», задает управляющий сигнал
иу . Автопилот парирует сигнал рассогласования, пропорциональный
(у'— Узад), аналогично парированию рассогласования от внешнего возмущения (у - у0). Управление углом крена от рукоятки осуществляется, как
правило, «по положению».
Функциональная схема аналогового электрогидравлического автопилота угла крена аналогична схеме автопилота угла тангажа, представленной
на рис. 9.2.
Влияние на процесс управления быстрым боковым движением. Рассмотрим процесс устранения начального отклонения угла крена у 0 с помощью
автопилота (рис. 9.17). Отклонение автопилотом элеронов создает управляющий момент элеронов М х 6 , пропорциональный у 0 . Под действием
293
этого момента появляется угловая скорость о>х, а угол крена начинает
уменьшаться. Когда динамический демпфирующий момент Мхш достигает
величины, равной моменту М х 5 , аэродинамический момент крена Мх
меняет знак и угловая скорость сох начинает уменьшаться. Для плавного
возвращения самолета с недостаточным собственным демпфированием
к заданному значению угла крена автопилот использует сигнал, пропорциональный ю х . Тогда элероны проходят исходное положение раньше, чем
угол крена, и создают момент, тормозящий движение самолета во время
приближения к заданному значению угла крена. Переходные процессы,
возникающие при этом, представлены на рис. 9.18. Если (у — узад) > 0, то
при возвращении к заданному значению крена угловая скорость самолета
сэх < 0. Поэтому сигнал, пропорциональный сох, стремится уменьшить
отклонение элеронов. Уменьшение углового отклонения самолета также
приводит к уменьшению отклонения элеронов. В момент времени 12
отклонение элеронов 5Э и его управляющий момент Мх6 обращаются
в нуль. Аэродинамический момент крена Мх обращается в нуль еще
раньше, в момент времени 11, вследствие влияния момента демпфирования
М х и . Таким образом обеспечивается своевременное изменение знака момента Мх и предотвращается перерегулирование.
Исследования показывают, что для сокращения времени переходного
процесса устранения начального отклонения по углу крена передаточный
коэффициент кт должен быть обратно пропорционален квадрату времени
переходного процесса, а передаточный коэффициент кт -обратно пропорционален времени переходного процесса. Считается, что автопилот угла
Рис. 9.17. Процесс устранения начального отклонения угла крена с помощью автопилота
294
Рис. 9.18. Процесс устранения начального отклонения угла крена при наличии в автопилоте сигнала, пропорционального угловой скорости крена
крена обладает требуемым качеством, если переходный процесс, вызванный ступенчатым управляющим
воздействием, не выходит из области
допустимых значений показателей качества: точности стабилизации угла
крена Ду = | Ау — Ау зад |, значения пема
ререгулирования угла крена 5У и вреV
мени регулирования угл.а крена 1рег.
Идеальный переходный процесс по
углу крена, которому соответствуют
оптимальные значения передаточных
коэффициентов закона управления
автопилота угла крена (9.32) ку и кщ>,
аналогичен переходному процессу по
углу тангажа (см. рис. 9.5).
Рис. 9.19. Процесс устранения автопиРассмотрим процесс устранения лотом угла крена с жесткой обратной
автопилотом угла крена с жесткой связью в сервоприводе внешнего стуобратной связью в сервоприводе пенчатого моментного возмущения
внешнего ступенчатого моментного
возмущения (рис. 9.19). Внешний момент крена Мхв вызывает появление угловой скорости сох и кренение
самолета. Автопилот отклоняет элероны пропорционально сумме сигналов
рассогласования по углу крена и угловой скорости. При этом управляющий
момент элеронов М х6 складывается с демпфирующим моментом Мхт_
и результирующий момент крена М х в момент времени 1Х меняет знак,
когда устанавливается их равенство внешнему моменту Мхв. Тем самым
обеспечивается торможение самолета при подходе к установившемуся
значению угла крена Ау у с т . Угловая скорость шх стремится к нулю и элероны принимают такое положение 8^., при котором управляющий момент
(Мх8 )уст уравновешивает внешний момент Мхв. Это приводит к появлению
статической ошибки по углу крена у уст , которая определяется выражением
Мхв
2
"г Мх'51рУ2
Статическая ошибка прямо пропорциональна возмущающему моменту
и обратно пропорциональна передаточному коэффициенту автопилота по
углу крена Ц.
Так как режим стабилизации крена в современных автопилотах как
самостоятельный режим применяется редко, принципиального значения
такие статические ошибки не имеют. Поэтому специальных мер по обеспечению астатизма контура управления углом крена (например, введение
изодромной обратной связи в сервопривод) не применяют.
295
Рис. 9.20. Структурная схема САУ-86 в режиме управления углом крена
Особенности законов управления аналоговых автопилотов угла крена.
Рассмотрим структурную схему системы САУ-86 в режиме управления от
рукоятки «Крен» (рис. 9.20).
Датчик угловой скорости крена ДУС размещен в блоке демпфирующих
гироскопов БДГ. Датчиком текущего угла крена является инерциальная
курсовертикаль ИКВ. Задатчиком угла крена служит рукоятка управления
РУ «Крен», находящаяся на пульте управления ПУ. Механизм согласования МС, сумматор С и предусилитель-преобразователь сервопривода
элеронов С/78, размещены в агрегате управления АУ, выполняющем
функции вычислителя автопилота ВАПу. Усиление управляющего сигнала
по мощности производится в блоке магнитных усилителей ЕМУ.
Особенность закона управления-использование апериодического свойства следящей системы механизма согласования МС, которое проявляется
в отработке сигнала заданного угла крена не мгновенно, а с задержкой
времени Тг Значение Тг поддерживается в пределах 1-1,2 с. Кроме того,
для предотвращения формирования слишком больших управляющих сигналов в механизме согласования предусмотрен специальный ограничитель,
имеющий передаточную функцию нелинейного звена с зонами насыщения:
РГ =
1
I Уз*ад
при у мс ^ у* д
при
(9.34)
*
7/зад>
где у* д = 20°.
Тогда закон управления имеет вид
8
=
+
г-к
1
(9.35)
Если рукоятка «Крен» находится в нейтральном положении, то система
стабилизирует тот угол крена, который имел самолет в момент включения
канала крена.
Аналогичным образом формируется закон управления САУ-1Т-2-62
в режиме управления от рукоятки «Крен». Отличие заключается в использовании в качестве датчика текущего угла крена центральной гировертикали ЦГВ-10П.
296
Рис. 9.21. Структурная схема САУ-154 в режиме управления углом крена
Рассмотрим структурную схему системы САУ-154 в режиме управления
от рукоятки «Крен» (рис. 9.21). Датчиком текущего угла крена является
малогабаритная гировертикаль МГВ. Функции вычислителя автопилота
выполняет блок автопилота БАП. В системе не предусмотрено согласование по сигналу угла крена и отсутствует механизм согласования. Включение
канала крена должно производиться при нулевом угле крена. Фильтрация
и ограничение сигнала заданного утла крена от рукоятки управления
производятся с помощью электронной схемы. Закон управления имеет
следующий вид:
Ю
(9.36)
Р
где Ру определяется аналогично (9.34).
Если рукоятка «Крен» находится в нейтральном положении у ру = 0, то
система стабилизирует нулевой угол крена.
Цифроаналоговые автопилоты угла крена (рис. 9.22). Датчиком текущих
параметров положения и движения самолета является инёрциальная навигационная система ИНС, вырабатывающая в виде последовательного
биполярного кода сигналы, пропорциональные угловой скорости крена сох,
углу крена у и боковой перегрузке пг. Закон управления формируется
в цифровом вычислительном блоке управления полетом БВУП. Управляющие сигналы в виДе напряжений постоянного тока и5 и и5 подаются на
аналоговые сервоприводы элеронов С778Э и руля направления СШН.
Согласование угла крена происходит в режиме совмещенного управления. При включении этого режима автопилот осуществляет стабилизаСигналы
*.
и разовые
команды
от других
датчиков
и систем — * БВУП
ие
*-,
гпЧ
Ых
Рис. 9.22. Функциональная схема цифроаналогового автопилота угла крена
ИНС
А
и
Г ^
Пг
а3 ,
°"
\
„„!•
Кн"Т
^
'
297
Рис. 9.23. Структурная схема цифроаналогового автопилота угла крена
цию угла крена, если усилие на штурвале или его перемещение не превышают пороговых значений, а текущий угол крена превышает 5°. Вмешательство пилота фиксируется по условию превышения усилия на штурвале
или его перемещения пороговых значений в течение определенного времени. Тогда режим стабилизации угла крена отключается и происходит
согласование угла крена.
Структурная схема цифроаналогового автопилота угла крена (рис. 9.23)
реализует следующий закон управления элеронами и рулями направления:
6, = :
+
=
, —Рд^.
г
Т
п,Р
8
298
'•р
<9-37)
Составляющая закона управления по угловой скорости крена а"" обеспечивает демпфирование боковых колебаний самолета. Управление углом
у
крена осуществляется составляющей а^ . Нелинейные звенья Р у1 и Ру2
ограничивают диапазоны изменения опорного угла крена у0 и приращения
угла крена Ау. Интегральная составляющая закона управления а^Лу обеспечивает устранение статической ошибки по углу крена. Эта составляющая
включается в закон управления релейным звеном РДу2, если приращение
угла крена Ау превышает заданное значение. Нелинейное звено с насыщением Ргд? ограничивает диапазон изменения интеграла от Ау.
Для выполнения координированных разворотов без скольжения автопилот угла крена формирует управляющее воздействие на сервопривод
рулей направления. Это воздействие пропорционально приращению угла
Ду
уш
/
-
^
.
п
крена стн , текущему углу крена ст„ , боковой перегрузке а„, интегралу
боковой перегрузки <г|,п', отклонению закрылков анм" и числу М полета с".
Таким образом осуществляется стабилизация угла крена самолетов
Ил-96 и Ту-204 с помощью системы ВСУП.
Влияние отказов и характеристик элементов автопилота угла крена на
управление боковым движением. Пассивные отказы автопилота угла крена
в контуре сервопривода приводят к потере автоматической стабилизации
и управления углом крена. Если сервопривод канала элеронов используется
также в режиме стабилизации курса, то теряется и эта функция. Активные
отказы автопилота угла крена приводят к отработке элеронов на полный
ход вала рулевой машины или штока рулевого агрегата. Пассивный отказ
по сигналу угловой скорости крена приводит к уменьшению эффективности
демпфирования боковых короткопериодических колебаний и раскачке самолета по рысканию. Пассивный отказ по сигналу текущего угла крена
приводит к потере автоматической стабилизации угла крена и автопилот
начинает работать как демпфер крена. Отказы в схемах согласования могут
привести к грубому включению автопилота в режим стабилизации угла
крена.
Погрешности измерителей угла крена и угловой скорости крена, а также
дрейф нулей датчиков приводят к появлению статических ошибок в управлении углом крена. Влияние разрегулировок передаточных коэффициентов
закона управления аналоговых автопилотов угла крена аналогично влиянию разрегулировок в аналоговых автопилотах угла тангажа.
9.2.2. Моделирование управления углом крена
Реакция самолета на управляющие воздействия автопилота угла крена.
Рассмотрим модель быстрого бокового движения самолета по угловой
скорости и углу крена (4.53), управляемого автопилотом угла тангажа
с законом управления (9.32). Управляющее воздействие формируется пилотом путем отклонения рукоятки «Крен». Модель содержит уравнения
состояния, входа и выхода, а также закон управления автопилота:
299
(9.38)
у66(1) = х66(1),
(9.39)
(9.40)
(9.41)
1 ВХ6 =
= -V
1> ш г
' " '
ащ 8
АПу
" ' 1 Вбб
_]'
Щб
о]'
|_Г
= I[ о
о
=
Подставим уравнения выхода (9.39) и входа (9.40), а также закон
управления (9.41) в уравнение состояния и выполним преобразование
Лапласа при нулевых начальных условиях:
Получим вектор передато1шых функций замкнутой системы «самолетавтопилот угла крена» по параметрам быстрого бокового движения «чистого крена» на управляющее воздействие по углу крена:
(Р)
=
АПу
66
Переходная матрица состояния по параметрам движения «чистого
крена» при включенном автопилоте угла крена
" (Р) = (р! - А66 -
(9.42)
гг
Элементами вектора \У6е (р) являются передаточные функции самолета
на управляющее воздействие по углу крена Ау зад (р) по соответствующим
параметрам вектора выхода У6б(р), совпадающего в рассматриваемом
случае с вектором переменных состояния быстрого бокового движения
Х66(р):
Переходная матрица состояния
(9.43)
Определитель матрицы \УА3Пу(р)
Р
1^0»)!- "
300
2
,
А АПу
,
А АПу
= р2 + А, 7 р +АО
л АПу
1
А
--
А АПу,
г
=А
(9.44)
(р),
ч
.-'4,8,4 >
Присоединенная матрица
(9.45)
Р~
Подставим выражения для определителя (9.44) и присоединенной матрицы (9.45) в (9.43):
ААПУ(Р)
к
Р-
„8, и.
(9.46)
ААПУ(Р)
Тогда вектор передаточных функций
ААП»
или
. АПу'
АПу
.АПу
р2 + А, т р + АО
2
р,-» п Л11у
где В]
.
р АПу
— —. ащ^Ку, В0
I
А ЛИТ
(9.47)
(9.48)
* Л
,
^ _А11у
— — ау ^а^ 5^ку = Ь1
Сравнивая выражения для передаточных функций (9.47) и (9.48) с выражениями для передаточных функций замкнутой системы «самолет-демпфер
крена» (6.75) и (6.76), приходим к выводу, что автопилот угла крена изменяет
структуру передаточных функций и характеристики образующих их звень301
Рис. 9.24. Структурная
схема замкнутой системы «самолет - автопилот угла крена»
лт
ев. Сворачивая структурную схему замкнутой системы «самолет-автопилот угла крена» (рис. 9.24), получим передаточную функцию (9.47).
Условия устойчивости системы по критерию Гурвица следующие:
(9.49)
0,
АО " = - а
Так как ащ8 < 0 и ащт < 0, то условия (9.49) выполняются всегда.
Правильным выбором передаточных коэффициентов 1сщ и кт добиваются
требуемых запасов устойчивости.
Рассмотрим реакцию замкнутой системы «самолет - автопилот угла
крена» на ступенчатое отклонение пилотом рукоятки «Крен». На этапе
быстрого бокового движения произойдет формирование нового установившегося значения угла крена
Ау у с т = 1
АПу
= 1йп
р^О
Р2 +
1
-АУзад = .
, ДА"?
+ А0
Установившееся значение угловой скорости крена принимает нулевое
значение:
(Асох)уст = 11т {РАГзад(р)\<Нр)} = Ор-О
Переходный процесс определяется переходной функцией
П АП Т
Л„
АПу
2
(9.50)
р + АГ"Р + АО
^
Корни характеристического уравнения
* АПу
7
А
А,
А1Ту
т
А0
=
как правило, являются комплексными сопряженными. Тогда переходную функцию (9.50) можно привести к простому виду:
Ду(р) = р[(
302
Р
-а) 2
(9.51)
Оригинал функции (9.50) находят с помощью обратного преобразования Лапласа
Ду (I) = Ае"' зш (со1 + ф) + В,
где А = —
со
1
Ь
ш22)1 / 2 >
(а 2 +ео 2 )
со
, ф = — агс1§—.
Аналогичным образом определяется переходный процесс по угловой
скорости крена.
Реакция замкнутой системы «самолет - автопилот угла крена» на внешние
возмущения. Рассмотрим модель быстрого бокового движения самолета,
управляемого автопилотом угла крена, при наличии внешних возмущений:
х66 (I) = А66х66 (I) + В^6и^6(1) + ВббНбб (I),
(9.52)
(9.53)
(9.54)
Здесь вектор входа и§б(1) и матрица входа Вв6(1)" определены выражениями (4.12)-(4.18). Подставим уравнения выхода (9.53), входа (9.54) и закон
управления (9.55) в уравнение состояния (9.52) и выполним преобразование
Лапласа при нулевых начальных условиях:
(р! - А66 -
у
) У66 (р) =
Получим матрицу передаточных функций замкнутой системы «самолет-автопилот угла крена» по параметрам быстрого бокового движения
самолета на внешние возмущения:
= <СУ(Р)В!6,
АПу
где переходная матрица Фбб (р) определена выражением (9.46).
Рассмотрим вектор передаточных функций по параметрам быстрого
бокового движения «чистого крена» на внешний момент крена тхв:
а
Р сох,тхв
303
или
АПу
„ ,Дт ,
^Дм»
--
(р) = - —
2 , л АПу
, . АПу
р2 + А, 'р + А 0
ч
г
„АПу
—
,
, с,ч
(9.56)
/г
АПу
<•-(?) = - ^ - — ,
2
р + АГ Р + О
АПу
-
(9.57)
.^АПу
где С, = аШ1т^, С0 = а^а,,,^ = С! .
Сравнивая выражения для передаточных функций (9.56) и (9.57) с выражениями для передаточных функций свободного самолета на внешний
момент крена, приведенными в табл. 4.2, приходим к выводу, что автопилот угла крена изменяет структуру передаточных функций и характеристики образующих их звеньев.
Рассмотрим реакцию замкнутой системы «самолет - автопилот угла
крена» на импульсный внешний момент крена Лтхв (I) = 5 (1) Атхв, т. е.
Лтхв(р) = Ат хв . На этапе быстрого бокового движения произойдет астатическое регулирование угла крена
Лууст = Нт {рДтхв(р)\Уд7"(р)} =
+ А*"'Р +
АВТОПИЛОТ угла крена с законом управления (9.32) является астатическим по отношению к внешнему импульсному моментному возмущению.
Если внешний момент крена есть ступенчатые функции Атхв(1) =
= 1 (I) Ат хв и Ат хв (р) = Атхв/р, то управление будет происходить со статической ошибкой:
С
АуУСТ =- шп
А
рДтхв
*"<АПу
С,
л т хв ^
А
т. е. автопилот угла крена с законом управления (9.32) является статическим
по отношению к внешнему ступенчатому моментному возмущению. Для
уменьшения статической ошибки необходимо увеличивать передаточный
коэффициент Ц.
Аналогичным образом могут быть получены передаточные функции
и исследована реакция системы на другие внешние возмущения.
304
9.3. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ КУРСОМ
9.3.1. Автопилоты курса
Направление движения самолета определяется курсом. В зависимости
от выбора опорного направления и вида измерителя курса различают
большое разнообразие курсов. Рассмотрим основные из них.
Истинным курсом (\|/и) называется угол между северным направлением
меридиана, проходящего через самолет, и проекцией продольной оси
самолета ОХ на горизонтальную плоскость ОХ?2В нормальной системы
координат. Отсчитывается истинный курс от северного направления меридиана по часовой стрелке. Если направление оси ОХ8 совпадает с направлением меридиана, то истинный курс равен углу рыскания \|/, но
противоположен ему по знаку.
Магнитный меридиан в общем случае не совпадает1 с истинным и составляет с ним угол, называемый магнитным склонением А м . Магнитный
курс (ум)~это угол между северным направлением магнитного меридиана,
проходящего через самолет, и проекцией продольной оси самолета ОХ на
горизонтальную плоскость ОХ82В нормальной системы координат. Если
известны магнитный курс и магнитное склонение, то истинный курс
Ч>„ = V» + А„Если самолет при отсутствии ветра следует с постоянным истинным
курсом, то траекторией его движения является локсодромия-кривая, пересекающая все меридианы между исходным (ИПМ) и конечным пунктами
маршрута (КПМ) под постоянным углом, равным истинному курсу
(рис. 9.25, о). Локсодромия не является кратчайшим расстоянием между
двумя точками на сфере. Поэтому задача стабилизации истинного курса
может решаться лишь при полетах на небольшие расстояния.
Ортодромия - дуга большого круга, соединяющая исходный и конечный
пункты маршрута по кратчайшему расстоянию. Ортодромия пересекает
меридианы между пунктами маршрута под разными углами. Поэтому
задача стабилизации самолета на траектории при полетах на большие
ИПМ
Рис. 9.25. Траектории движения самолета:
а-при полете по локсодромии; б-при полете по ортодромии
305
расстояния сводится к задаче стабилизации ортодромического курса^
(рис. 9.25, б),
Ортодромический курс (ч>орт)-угол между опорной ортодромией, при!
нятой за исходную для отсчета, и проекцией продольной оси самолета нЦ
горизонтальную плоскость. Обычно опорной траекторией считают мери*?
диан исходного пункта маршрута. Поэтому ортодромическим курсом?
называют угол между северным направлением меридиана ИПМ и проект?
цией продольной оси самолета на горизонтальную плоскость (или про-*
дольной осью самолета в случае горизонтального полета).
В промежуточных пунктах маршрута (ППМ) истинный курс самолета
определяется через ортодромический курс следующим образом:
где Д1>)-угол схождения меридианов.
Для определения угла схождения меридианов необходимо знать долготу
и широту ИПМ А,,,™ и ф ппм) а также долготу и широту ППМ ^ппм и фппм.
Тогда
.
л
\ •
Фппм
/л
М = (Х.ппм - ?1ИПМ) 51П I
'
фипм I
I .
Кроме введенных понятий курса существуют понятия компасного,
гироскопического, гирополукомпасного, гиромагнитного, приведенного и
других курсов. Для автоматизации стабилизации и управления курсом не
имеет принципиального значения, какой именно курс используется для
управления. Поэтому в данном разделе будем пользоваться обобщенным
понятием курса.
Устройство и работа. Самолет как объект управления нейтрален по
рысканию и курсу в боковом движении. Любое внешнее возмущение
приводит к изменению углов рыскания и курса. При ручном управлении
боковым движением самолета пилоту приходится решать две взаимосвя-занные задачи: стабилизировать продольную ось самолета и стабилизировать вектор скорости по курсу. Поворот продольной оси в горизонтальной плоскости происходит под действием моментов относительно вертикальной оси.
Управляющий момент относительно этой оси создается пилотом при
отклонении педалей И рулей направления. Поворот вектора скорости по
курсу происходит под действием боковой силы. Эта сила может быть
создана или за счет скольжения или за счет горизонтальной составляющей
подъемной силы, появляющейся при отклонении пилотом баранки штурвала и элеронов. Таким образом, у пилота существуют две возможности
стабилизировать самолет по курсу: наблюдая за изменением курса по
приборам, воздействовать на педали или штурвал. Для освобождения
пилота от этой задачи служат автопилоты курса, воздействующие на рули
направления (автопилоты прямой схемы) и элероны (автопилоты перекрестной схемы).
Автопилот курса прямой схемы (А П\]/)- средство автоматического
управления, обеспечивающее управление и стабилизацию бокового траек306
Рис. 9.27. Функциональная схема электромеханического автопилота курса перекрестной схемы
привода поступает сигнал, пропорциональный отклонению самолета Дук
от того курса \|/0, который он имел в момент включения режима стабилизации. Сигнал иду, пропорциональный разности (\|/к — у|/0) поступает на
сервопривод, который отрабатывает руль направления до тех пор, пока
сигнал обратной связи рулевой машины с ДОС ижос не уравновесит сигнал
иД1^. Сигнал и,,, с ДУС обеспечивает демпфирование колебаний самолета по
рысканию. Отклонение руля направления вызывает появление управляющего аэродинамического момента Му6=, противоположного по знаку возмущению, вызвавшему рассогласование (\|/к — у|/0). Это рассогласование
будет постепенно уменьшаться и, когда текущее значение курса у, сравняется с требуемым значением \|/0, сервопривод под действием сигнала
обратной связи ижос возвратит руль направления обратно в балансировочное положение. Таким образом, самолет будет стабилизироваться по курсу.
Управление самолетом по курсу с помощью автопилота прямой схемы,
как правило, не осуществляется, так как при плоском развороте с помощью
руля направления курс меняется слишком медленно. Поэтому автопилоты
курса прямой схемы находят все меньшее применение.
Автопилот курса перекрестной схемы (АПуу)- средство автоматического управления, обеспечивающее управление и стабилизацию бокового
углового движения самолета на всех этапах полета путем отклонения
элеронов при возникновении рассогласования между текущим и заданным
значениями курса.
Типовой закон управления автопилота курса перекрестной схемы имеет
следующий вид:
(9.59)
. = Уо — VI в режиме стабилизации курса;
= Уз, — V* в режиме управления курсом,
308
<п
где 6Э
-автоматическое отклонение элеронов от балансировочного положения
автопилотом курса перекрестной схемы; у, у 3 ад~ соответственно приращения текущего и заданного значений угла крена; Д\|/к-приращение курса, определяемое как
разность между опорным \|/0 и текущим у, значениями курса в режиме стабилизации
и разность между заданным \|/и и текущим значениями курса в режиме управления;
к^'-передаточный коэффициент по углу крена на изменение курса, определяющий,
какой угол крена должен занять самолет при возникновении рассогласования по
курсу в 1°.
В состав автопилота курса перекрестной схемы (рис. 9.27) входят датчик
угловой скорости крена ДУС, датчик утла крена-гировертикаль ГВ, датчик
курса - курсовая система КС, формирователь рассогласования между текущим и заданным значениями курса -пилотажно-навигационный прибор
ПНП с задатчиком курса ЗК, формирователь рассогласования между
текущим и опорным значениями курса-блок синхронизации курса БСК,
формирователь приращения заданного утла крена - вычислитель автопилота курса ВАПуу, вычислитель автопилота крена ВАЩ и сервопривод
элеронов С775Э.
Автопилот работает в трех режимах: согласования, стабилизации и управления курсом. Режим согласования по текущему курсу происходит так
же, как в автопилоте курса прямой схемы, а по текущему углу крена-как
в автопилоте угла крена.
В режиме стабилизации сначала происходит приведение самолета к горизонту-устранение рассогласования по углу крена как в автопилоте угла
крена. На вход вычислителя ВАПуу с БСК поступает сигнал иД1|/ , пропорциональный отклонению самолета от того курса у„, который1 он имел
в момент принятия самолетом горизонтального положения. Сигнал иу ,
пропорциональным рассогласованию по курсу, разворачивается в сторону
батывает элероны до тех пор, пока сигнал обратной связи рулевой машины
с датчика ДОС ижос не уравновесит сигнал ид>),. Сигнал иш с ДУС обеспечивает демпфирование колебаний самолета по углу крена.
Отклонение элеронов вызывает появление управляющего аэродинамического момента М х 6 , противоположного по знаку возмущению, вызвавшему рассогласование (\|/0 — \|/к). Самолет входит в крен, и с гировертикали
ГВ появляется сигнал иу, преобразованный в механизме согласования МС
в сигнал иДу. Когда этот сигнал становится равным сигналу иу , элероны
возвращаются в балансировочное положение. Самолет с углом крена,
пропорциональным рассогласованию по курсу разворачивается в сторону
требуемого курса у 0 . Сигнал ид>|/ постепенно уменьшается и разность
сигналов (гц — йу) меняет знак. Се'рвопривод отклоняет элероны в противоположнукГсторону. Самолет выходит из крена и возвращается к горизонтальному полету, когда \|/к = \|/0.
Пилот, воздействуя на рукоятку задатчика курса ЗК, задает управляющий сигнал Цу . В ПНП формируется сигнал идч, , пропорциональный
разности Д\|/эк = Узк — 4>к- Автопилот парирует рассогласование Д\|/зк аналогично парированию рассогласования Д\|/кс от внешнего возмущения.
Управление курсом от рукоятки осуществляется «по положению». Заданный курс пилот отслеживает по прибору.
Л Ч>,
НА,,
Му
Рис. 9.28. Процесс устранения начального отклонения продольной оси самолета от заданного курса автопилотом курса прямой схемы
Функциональная схема аналогового электрогидравлического автопилота курса перекрестной схемы
аналогична схеме автопилота угла
тангажа с соответствующим изменением набора датчиков и входных сигналов.
Влияние на процесс управления боковым движением. Рассмотрим процесс устранения автопилотом курса
прямой схемы начального отклонения продольной оси самолета от заданного курса, представленный на
рис. 9.28. Такое отклонение Лу приведет к появлению приращения угла
скольжения и момента статической
путевой устойчивости М Этот момент будет способствовать сокращению переходного процесса устранения начального отклонения. Отклонение автопилотом руля направления
5Н ^ создаст управляющий момент
М у 8 , совпадающий по знаку с моментом" Мур. Если собственное демпфирование самолета достаточно, то за счет динамического демпфирующего
момента Му(0 при подходе самолета к заданному положению результирующий аэродинамический момент рыскания Му, равный сумме моментов Мур,
Му6 и М у г а , поменяет знак. Тормозящее отклонение руля направления
создается автопилотом по сигналу угловой скорости юу. Таким образом,
процесс устранения автопилотом курса прямой схемы начального отклонения продольной оси самолета от заданного курса аналогичен процессу
устранения начального отклонения поперечной оси от заданного угла
тангажа автопилотом угла тангажа.
Рассмотрим процесс устранения автопилотом курса прямой схемы
начального отклонения вектора скорости самолета от заданного курса
(рис. 9.29). Продольная ось самолета направлена по заданному курсу.
Появляется приращение угла скольжения и вектор скорости начинает
поворачиваться под воздействием боковой силы, создаваемой скольжением. С приближением вектора скорости к продольной оси приращение угла
скольжения уменьшается. Момент статической путевой устойчивости Мур
вызывает поворот продольной оси самолета навстречу вектору скорости
самолета, что приводит к рассогласованию по курсу Л\|/к. Это рассогласование парирует автопилот отклонением руля направления.
Если одновременно отклоняются от заданного курса и продольная ось
самолета и вектор скорости, то автопилот, воспринимая отклонение продольндй оси самолета, отклоняет руль направления и поворачивает самолет к заданному курсу. Образующееся при этом скольжение создает
310
боковую силу, поворачивающую к заданному курсу и вектор скорости
самолета.
Рассмотрим процесс устранения автопилотом курса перекрестной схемы
начального отклонения продольной оси самолета от заданного курса
(рис. 9.30). Парируя отклонение самолета по курсу, автопилот отклоняет
элероны и вводит самолет в крен, который создает боковую силу. В результате вектор земной скорости самолета разворачивается к заданному курсу.
Вследствие отставания продольной оси самолета от вектора скорости
создается приращение угла скольжения. Момент статической путевой
устойчивости М у р разворачивает продольную ось самолета вслед за вектором скорости к заданному курсу. Для уменьшения скольжения канал
руля направления может работать как автомат боковой устойчивости.
Автопилот курса прямой схемы с жесткой обратной связью в сервоприводе является статическим по отношению к постоянно действующему
внешнему моменту Мув. Статическая ошибка (Д\|/к)уСт определяется из
равенства управляющего момента руля направления и возмущающего
момента:
2
М„
Аналогичным образом для автопилота курса, перекрестной схемы
2
М„
Ступенчатый боковой ветер автопилотами курса как прямой, так
и перекрестной схем парируется без статических ошибок по курсу. Однако
при этом угол пути изменяется на величину приведенного к ветру угла
скольжения Д*Р = Д\|/ — ДР — ДР„ и самолет изменяет направление полета.
Особенности законов управления автопилотов курса. Для обеспечения
астатизма в закон управления автопилотов курса прямой схемы вводят
сигнал, пропорциональный интегралу от рассогласования по курсу. Структурная схема автопилота АП-28 в режиме стабилизации локсодроми-
Рис. 9.29. Процесс устранения начального отклонения вектора скорости самолета от заданного курса автопилотом курса прямой схемы
311
Му
.4»
Му13
Рис. 9.30. Процесс устранения начального отклонения продольной оси самолета от
заданного курса автопилотом курса перекрестной схемы
Рис. 9.31. Структурная схема АП-28 в режиме стабилизации локсодромического
курса
МС
^"| 1о \ * %9 -*м У*"
АУ
Рис. 9.32. Структурная схема
САУ-86 в режимах стабилизации курса и заданного курса
ческого курса (рис. 9-31) содержит БДУС-блок датчиков угловых скоростей, ГИК- гироиндукционный 'компас, БС-блок связи, А У- агрегат управления, МУМ- магнитный усилитель мощности, РМН- рулевую машину направления. Закон управления имеет вид
*Д>
, ,
,-,. , .
(9 60)
где К|Ду -передаточный коэффициент по интегралу отклонения курса самолета от
заданного.
В законах управления аналоговых автопилотов следует учитывать
передаточные функции следящих электромеханических систем, выполняющих функции согласования, обнуления и суммирования. Так, передаточная
функция электромеханизма согласования по крену представляет собой
передаточную функцию апериодического звена ^мс(р) = 1/(Тур +1). Аналогичный вид имеет передаточная функция следящей системы навигационного прибора, осуществляющего формирование сигнала рассогласования
по курсу \Упнп(р) = 1/(Т„,р + 1).
Чтобы предотвратить формирование слишком больших управляющих
сигналов при разворотах и значительных отклонениях от заданного курса,
реализуются нелинейные звенья с ограничением сигналов при достижении
ими определенных значений.
Структурная схема САУ-86 в режимах стабилизации курса и заданного
курса представлена на рис. 9.32, где БДГ-блок демпфирующих гироскопов, ЯА'В-йнерциальная курсовертикаль, БСКВ- базовая система курса
и вертикали, ПУ- пульт управления, ПНП- пилотажно-навигационный
прибор, БСДТ-блок связи с датчиками траектории. Закон управления
имеет вид:
5э = га,
к сохх + к.у ^
( у — ЧР у^р _|_
Узад),
| заду ,
(9.61)
в режиме стабилизации курса;
1у
' V
Тур + 1
в режиме заданного курса;
при Ду мс < Ду огр ;
Ч
' ДУог
-— при Думс > Дуогр;
V
Ку Д\|/31,
при Д\|/зк < Дх|/31[.огр;
Ку-'ДЧ^.ОГр
При Д\СЗК ^ Д^зк.огр •
313
Цифроаналоговые автопилоты курса. Устройство цифроаналоговых автопилотов курса аналогично устройству цифроаналоговых автопилотов
угла крена. Режим стабилизации курса реализуется в боковом канале
цифроаналоговой САУ, функциональная схема которой представлена на
рис. 9.21. При этом следует учесть наличие дополнительного сигнала
с инерциальной навигационной системы, пропорционального текущему
курсу. Режим стабилизации курса включается, если усилие на штурвале или
его перемещение, а также угол крена не превышают пороговых значений.
При вмешательстве пилота в управление от штурвала режим стабилизации
курса отключается и происходит согласование курса.
Структурная схема и закон управления цифроаналогового автопилота
курса также аналогичны структурной схеме и закону управления автопилота угла крена. Их отличие состоит в том, что с помощью релейного звена
РДу, происходит подключение сигнала, пропорционального рассогласованию тю курсу:
Д"У
.
^-^
[-
— кк гК
IV
Оэ ' —
у у21_Г
-.-,
ГЬ
у|1Л1/0
у-,
г г*
,
Ш
,
ч-|
Ду! ку" 1 \А т1 к1
\1/ 1 1
т(Ш
•
к
*п
*-**-.
1 Ч п/ I
\?.и^)
Таким образом осуществляется стабилизация курса самолетов Ил-96
и Ту-204 с помощью вычислительной системы управления полетом.
9.3.2. Моделирование управления курсом
Реакция замкнутой системы «самолет - автопилот курса» на управляющие
воздействия. Рассмотрим модель быстрого бокового движения самолета,
управляемого автопилотом курса перекрестной схемы с законом управления (9.59). Управляющее воздействие формируется пилотом путем отклонения рукоятки задатчика курса. Модель содержит уравнения состояния,
выхода и входа, а также закон управления автопилота:
•В«б(1),
(9.63)
(9.64)
(9.65)
(9.66)
Дшу(1)
где Х66(1) =
Ар (О
Ау(1)
314
**в,у
"
о
о
о
о
°>хА
О
0 0
О
О
о
АПч/у
ч/,
Подставим уравнения выхода (9.64) и входа (9.65), а также закон
управления (9.66) в уравнение состояния (9.63) и выполним преобразование
Лапласа при нулевых начальных условиях:
- А« -
) У66(Р) =
Получим вектор передаточных функций замкнутой системы «самолет автопилот курса перекрестной схемы» по параметрам быстрого бокового
движения
- = (р! - А66 -
Переходная матрица состояния по первичным параметрам быстрого
бокового движения при включенном автопилоте курса перекрестной схемы
(9.67)
Элементами вектора \Убб ^ (р) являются передаточные функции системы
на управляющее воздействие^
по курсу Д\|/эад (р) по соответствующим параметрам вектора выхода Убб(р):
«(Р)
, ,
(Р) =
•(Р)
'(Р)
"(Р)
315
Найдем определитель матрицы
Р-Ч,.-Чл
1»
Л
0
р-а ю < 1 ,
0-
-ау>ш,
— агт
0
5 , «АПчг(
— Р + Л4
,
где А4
д
_а ш
^
р
Р~ а р,р
а
^Л
]^
о
0
а
Р,у
0
0
0
р
0
-а ут
0
0
р
4 _|_ А ^^^У
3
,
А ^П\|/7
3 _|
А ^^Ч'У
1^
С'
= -а
АПуу
3
.
1
А
. АПуу
0
А
Условия устойчивости системы по критерию Гурвица следующие:
у
П
У
у
О, А^ > О, А^ ^ > О, А^ > О, АГ
УТ
> О,
А АП\(/у . АПуу . АПуу А АПуу
~ . АПуу Л АПуу . АПуу
/\4
^3
^*-2
^*1
> -^^4
^1
'М)
"*
. АПу|/у
,д АПч/уАч 2 л А^Ч'У А л
д АПч/уА . АПуу
А
"г Л3
2
0
"~ (Л2
) 1
"~ 4
АП
^ I А АПЧ'Уч!
*
(Аз
/ А0
> 0.
316
Ч'У
—
Правильным выбором передаточных коэффициентов к ш , Ц, и кжу добиваются требуемых запасов устойчивости.
Передаточную функцию системы по курсу на управляющее воздействие
определим следующим образом:
ВО
. (9.68)
ЛП
А
2
>
Рассмотрим реакцию замкнутой системы на ступенчатое отклонение
пилотом задатчика курса Дх|/эад (р) = Д\|/зад/р. После окончания этапа быстрого бокового движения произойдет формирование нового установившегося значения текущего курса самолета, равного заданному:
А\1/уст = 11т {рД\|/заД.(р)^д*-"(р)} =
р-»0
„АПч/у
"О
I
. АПшу
у
. АПуг
У
3
I
А2 ^
АП\|/у
А, "
4
» АПшу
А0
А\|/зад =
Переходный процесс определяется переходной функцией Д\|/(р).
Реакция замкнутой системы «самолет-автопилот курса» на внешние
возмущения. Рассмотрим модель быстрого бокового движения «чистого
рыскания», управляемого автопилотом курса прямой схемы, при наличии
внешних возмущений:
х66 (I) = А66х6б (1) + ВбвИбб (I) + В66и?6 (I),
(9.69)
(9.70)
(9.71)
•*.(!) =
(I),
Ао>уЮ
АРЮ
А„(1)
а
, А66 =
(оу,<оу
а
р,»>,
а
у,соу
а
о>у,р
а
°
°
°
(9.72)
р,р °
О),
317
в;и =
о о Ч». Чт. °
0
0
0
0
0
Получим матрицу передаточных функций замкнутой системы «самолет-автопилот курса прямой схемы» по параметрам быстрого бокового
движения чистого рыскания на внешние возмущения
6 (Р) =
(Р) В&в .
г; =.<р! - А66 -
Переходная матрица состояния по параметрам движения чистого рыскания при включенном автопилоте курса прямой схемы
(9.73)
Найдем определитель матрицы
_я
ш ,Р
—я
г V
Ю ,О
р - ар р
О
О
р
V
где
Определим присоединенную матрицу
р ( р - ар р
(Р
(р-а р | 5 )(р-а Ш у Ш у )
318
Тогда переходная матрица
бб
а
Р(Р ~ р,з)
А АП »
АПу , ч
(Р)
А АП »
-[(р- а в,в)'
(Р -
Определим вектор передаточных функций на внешний момент рыскания
Ат„
Р(Р ~
ИЛИ
у 2 ,
р +
(9.74)
А АП *
319
^"(р)=
Р
А!^—хн
"Т" А-2
Р
~^~ А.}
^~,АЩг
т
\<
(р) =
Ду,. \г}
„АПу
Ч
^АП\|/
'
Р ~^~ 1
(9 75)
-
,-,АПу
р+ С
'
'
(9V-76)
*'"/
7
.^АПу
Сравнивая выражения для передаточных функций (9.74)-(9.76) с выражениями для передаточных функций замкнутой системы «самолет - автопилот угла тангажа» (9.18)-(9.20), приходим к выводу, что их структуры
идентичны. Поэтому реакция замкнутой системы «самолет - автопилот
курса прямой схемы» на внешний момент также будет аналогичной.
Следовательно, автопилот курса прямой схемы с законом управления
(9.58) является астатическим по отношению к внешнему импульсному
моментному возмущению по рысканию и статическим по отношению
к внешнему ступенчатому моментному возмущению по рысканию. Статическая ошибка определяется как
аш
Юу т
Л*Суст =
а
'"
ФО
шу,6„ар,|3Кч/„
и может быть уменьшена путем увеличения передаточного коэффициента Ц,.
Г л а в а 10
УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА
МАРШРУТЕ
Автоматическое управление траекторным движением самолета на
маршруте обеспечивает лишь эпизодическое участие или практически полное невмешательство пилота в процесс управления. Это возможно в том
случае, когда решена задача автоматического управления угловым положением самолета. Поэтому системы автоматического управления траекторным движением самолета на маршруте стали дальнейшим развитием
автопилотов. Их общей особенностью является автоматическое отклонение
руля при появлении рассогласования между текущими и требуемыми
значениями траекторных параметров положения и движения самолета.
Благоприятное влияние автоматики на процесс управления полетом
самолета проявляется в улучшении качества переходных процессов возвращения самолета к исходной траектории после непроизвольного отклонения
под действием внешних возмущений. Так осуществляется автоматическая
стабилизация траекторного движения на маршруте. Кроме того, автоматика помогает пилоту улучшить качество переходных процессов вывода
320
самолета на новую траекторию. Так осуществляется автоматическое управление траекторным движением самолета на маршруте.
Основной траекторный параметр продольного движения самолета на
маршруте - высота полета. Наивыгоднейшие высоты полета рекомендуются в зависимости от дальности полета с учетом ограничений по максимальной коммерческой нагрузке. При больших дальностях полета оптимальным
эшелоном для крейсерского полета является максимальный эшелон в пределах ограничений полетной массы. Иногда выгоден ступенчатый профиль
полета, когда самолет последовательно занимает определенные эшелоны.
Основными траекторными параметрами бокового движения самолета
являются линейное боковое и угловое отклонения от линии заданного пути.
Поэтому различают системы автоматического управления боковым линейным и угловым отклонениями.
10.1. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ
ПРОДОЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕ
10.1.1. Системы автоматического управления продольным
траекторным движением на маршруте
Принцип действия. Самолет как объект управления неустойчив в продольном траекторном движении по высоте при действии внешних возмущений. Для стабилизации самолета по высоте пилот, наблюдая за изменением высоты по высотомеру, воздействует на колонку штурвала и отклоняет руль высоты таким образом, чтобы самолет удерживал требуемое
значение высоты или изменял его соответствующим образом. Системы
автоматического управления высотой служат для освобождения пилота от
ручной стабилизации и управления самолетом на траектории в вертикальной плоскости.
Система автоматического управления высотой (СЛУН) обеспечивает
стабилизацию и управление продольным траекторным движением самолета в крейсерском полете по маршруту и во время предпосадочного маневра
путем отклонения руля высоты при возникновении рассогласования между
значениями текущей и заданной барометрической высоты.
Простейшая САУ Н реализует следующий закон управления рулем
высоты:
5САУН = к Ш г ю г + к1)До + Ш(Н-Н 0 ),
.
(10.1)
АУ
где 8^ Н-автоматическое отклонение руля высоты от балансировочного положения; Ди-приращение опорного (т.е. имевшего место в момент включения режима)
угла тангажа о0; Н, Н0-соответственно текущее и опорное (в момент включения
режима) значения барометрической высоты; кН- передаточный коэффициент по
барометрической высоте, определяющий угол отклонения руля высоты при возникновении рассогласования между значениями текущей и опорной барометрической
высоты в 1 м.
ПЗак.948
321
Другими словами, отклонение руля высоты прямо пропорционально
угловой скорости тангажа, приращению опорного угла тангажа и приращению опорной барометрической высоты.
Закон управления (10.1) можно также представить как закон управления
автопилота угла тангажа, обеспечивающий формирование заданного угла
тангажа пропорционально приращению барометрической высоты:
8в АУн = Ч ш г + ^(А1)-Ао,ад), А» = о - «„, Ао зад = к" (Н0 - Н) ,(10.2)
где Аи, Дизад-соответственно приращения текущего и заданного значений угла
тангажа; к„ -передаточный коэффициент по углу тангажа, определяющий, на сколько градусов должен измениться угол тангажа при возникновении рассогласования
между значениями текущей и опорной барометрической высоты в 1 м.
Сервоприводы систем автоматического управления включаются по
параллельной схеме в прямые обратимые системы управления, либо п<
последовательной схеме в бустерные или электродистанционные системь
управления. Совместное управление рулем высоты со стороны пилота
и САУ Н исключается. При воздействии пилота на колонку штурвала САУН
выключается и освобождает механическую проводку управления рулем
высоты.
Сервоприводы бывают как электромеханического, так и электрогидравлического принципа действия. Рассмотрим функциональную схему аналоговой электромеханической САУ Н (рис. 10.1). В ее состав входят датчик
угловой скорости тангажа ДУС, датчик угла тангажа-гировертикаль ГВ,
датчик рассогласования между значениями текущей и опорной барометрической высоты-корректор высоты КВ, вычислитель ВСАУН, вычислитель
автопилота ВАПо, усилитель У и рулевая машина РМ6В.
САУ Н работает в двух режимах: согласования и стабилизации высоты.
В режиме согласования в корректоре высоты происходит непрерывное
обнуление сигнала текущей высоты с помощью электромеханической следящей системы. Система может работать при этом в автопилотном режиме
стабилизации угла тангажа. Таким образом происходит запоминание
текущей высоты и обеспечивается подготовка САУ Н к безударному включению для стабилизации высоты.
При включении режима стабилизации высоты следящая система корректора высоты размыкается и начинается формирование сигнала разности
идн между опорным значением высоты, которую имел самолет в момент
включения режима стабилизации, и значением текущей высоты. Любое
отклонение самолета под действием внешних возмущений от опорной
высоты воспринимается САУН как рассогласование, которое необходимо
парировать. Сигнал и дн поступает на вход вычислителя, где формируется
сигнал, пропорциональный приращению значения заданного угла тангажа
иД()мд. Сервопривод преобразует этот сигнал в перемещение вала рулевой
машины высоты.
Как только сигнал обратной связи и жос уравновесит сигнал с корректора
высоты идн и пропорциональный ему сигнал заданного тангажа иДи ,
отработка руля высоты рулевой машиной прекратится и руль остановится
322
Рис. 10.1. Функциональная
схема
системы автоматического управления
высотой
в некотором положении, пропорциональном возникшему рассогласованию
(Н0-Н). Отклонение руля высоты вызывает управляющий аэродинамический момент тангажа М28_, противоположный по знаку возмущению,
вызвавшему рассогласование (Н0-Н). Самолет начнет изменять угол
тангажа и с гировертикали появится сигнал текущего тангажа и„, который
преобразуется в МС в сигнал ид„. Под действием этого сигнала сервопривод начнет отрабатывать руль высоты в обратную сторону. Когда сигнал
приращения текущего угла тангажа и^ сравняется с сигналом приращения
заданного угла тангажа ид„^, руль высоты вернется в исходное балансировочное положение.
Самолет с новым углом тангажа начнет приближаться к опорному
значению высоты. Тогда равновесие сигналов ид„ и ид„ вновь нарушится
и их разность поменяет знак. Сервопривод начнет отрабатывать руль
высоты в противоположную от балансировочного положения сторону.
Когда сигнал обратной связи ижос сравняется с сигналом разности
(иДи-ид„ ), руль высоты остановится. Самолет начнет уменьшать приращение угла тангажа и по мере выхода на опорную высоту сигналы иДц,
ид„ и идн станут равными нулю. Тогда под действием сигнала обратной
связи ижос руль высоты возвратится в исходное балансировочное положение.
Действия сигналов иш с датчика угловой скорости и исос с тахогенератора аналогичны их действию в демпфере и автопилоте угла тангажа.
Режим управления высотой от задатчика в аналоговых САУН до
недавнего времени не применялся. В последних модификациях аналоговых
САУ такой режим предусмотрен. Тогда в законе управления (10.2) заданный угол тангажа определяется следующим образом:
= ки (Н з а д -Н),
(Ю.З)
где Н мд - заданное значение барометрической высоты (например, высоты эшелона).
Для формирования Нзад используется специальный задатчик на пульте
управления. Формирование разности (Нзад-Н) происходит в вычислителе
системы воздушных сигналов. Работа САУН в этом режиме аналогична ее
работе в режиме стабилизации, так как она воспринимает управляющее
воздействие АН = (Нзад-Н) как внешнее возмущение АН = (Н0 — Н).
При наборе высоты и снижении пилоту приходится выдерживать определенную вертикальную скорость. Он наблюдает за ее изменением по
вариометру и воздействует на колонку штурвала, чтобы самолет удерживал
требуемое значение вертикальной скорости или изменял ее соответствую'
323
и-
УАЗ?
ДУ1
и&
ГВ
нв
иу
—* ВСАУ
8АП&
М^РЗО?
Цнзад
х
^
иск
и»ос
РМов
Н
Рис. 10.2. Функциональная схема системы автоматического управления вертикальной скоростью
ющим образом. Системы автоматического управления вертикальной скоростью служат для автоматизации маневров самолета в вертикальной
плоскости.
Система автоматического управления вертикальной скоростью (С А У ц)
обеспечивает стабилизацию и управление продольным траекторным движением самолета при наборе высоты и снижении путем отклонения руля
высоты при возникновении рассогласования между текущим значением
угла тангажа и его заданным значением, определяемым заданным значением вертикальной скорости.
Закон управления САУд имеет вид:
ад
=к" Нзад , (10.4)
где 8^АУп- автоматическое отклонение руля высоты от балансировочного положения
САУд; Ли, Дозад- соответственно приращения текущего и заданного значений угла
тангажа; Й зад - заданное значение вертикальной скорости; к„ -передаточный коэффициент по углу тангажа к вертикальной скорости, определяющий, на сколько
градусов должен измениться угол тангажа при изменении вертикальной скорости на
1 м/с.
В состав САУн входят (рис. 10.2) датчик угловой скорости тангажа
ДУС, датчик угла тангажа ГВ, задатчик вертикальной скорости -навигационный вычислитель НВ, вычислитель заданного угла тангажа ВСАУц,
вычислитель автопилота ВАШ, усилитель У и рулевая машина высоты
РМ6В. Работа САУд аналогична работе САУ Н . При этом обеспечивается
постоянство угла наклЬна траектории и воздушной скорости. С переходом
на непосредственное автоматическое управление продольным движением
центра масс самолета управление высотой осуществляют через контур
нормальной перегрузки.
Система автоматического управления высотой через контур нормальной
перегрузки (САУд„^) обеспечивает стабилизацию и управление продольным траекторным движением самолета в крейсерском полете по маршруту
и во время предпосадочного маневра путем отклонения руля высоты при
возникновении рассогласования между значениями текущего и заданного
приращений нормальной перегрузки, причем заданное приращение нормальной перегрузки определяется разностью между значениями заданной
и текущей барометрической высоты.
324
Закон управления САУцп имеет следующий вид:
5|гАУнпу. = ^Шх + ^ [ДПу _ (ДПу)зад ], (Апу)зад = 1с д„у (Д«зад - Аи),
Ло,ад = к"(Н з а д -Н),
(10.5)
АУнп
где §з
автоматическое
отклонение
руля
высоты
от
балансировочного
положеу
ния САУ Нп ; Дп у , (Дпу)мд- текущее и заданное значения приращения нормальной
перегрузки; 1сдп -передагочный коэффициент по приращению нормальной перегрузки; Ли, Дозад-текущее и заданное значения приращения угла тангажа; Ь:дп -передаточный коэффициент по приращению нормальной перегрузки к углу тангажа; Н,
II
Нзад-текущее и заданное значения барометрической высоты; к ц -передаточный
коэффициент по углу тангажа к барометрической высоте.
Функциональная схема САУНп аналогична функциональной схеме
САУН (см. рис. 10.1), но содержит еще датчик нормальной перегрузки.
Профиль полета самолета может задаваться значениями нормального
ускорения в каждой точке траектории.
Система автоматического управления нормальным ускорением (САУа )
обеспечивает стабилизацию и управление продольным траекторным движением самолета в крейсерском полете по маршруту путем отклонения
руля высоты при возникновении рассогласования между значениями текущего и заданного приращений нормальной перегрузки, причем заданная
нормальная перегрузка определяется заданным нормальным ускорением:
5в ЛУа у = ^ш, юг + Кдп, (Дпу - Апу.зад),
(Апу)зад = кд"п> а у . 3 а д ,
(1°-6)
АУ
где 5^ ау-автоматическое отклонение руля высоты от балансировочного положения С АУ а ; а у з а д - заданное значение нормального ускорения; 1сд'„ -передаточный
коэффициент по приращению нормальной перегрузки к нормальному ускорению.
Управление движением. Качество работы САУН и ее влияние на процесс
управления продольным движением можно оценить по качеству переходных процессов управления высотой.
Рассмотрим процесс устранения отрицательного начального отклонения
высоты АН = (Н — Н0) с помощью САУ Н (рис. 10.3). В начальный момент
времени 1„ самолет летит с постоянным утлом атаки а0. Подъемная сила
У ао уравновешивает силу тяжести самолета О. Руль высоты находится
в балансировочном положении 6В(10).
Появление рассогласования по высоте АН в момент времени ^ начинает
парироваться САУ Н отклонением руля высоты на отрицательный угол
§„(1!). Управляющий момент тангажа Мй вызывает увеличение угла атаки
на величину Аа(11), пропорциональную б.^Д В результате подъемная сила
увеличивается на величину АУа(11), пропорциональную Да. Это сопровождается изменением угла тангажа. Под действием приращения подъемной
силы вектор скорости поворачивается в сторону опорной высоты и траектория полета самолета искривляется, что выражается в изменении угла
наклона траектории А0.
Изменение угла атаки вызывает появление статического момента Мш,
который в момент времени 12 уравновешивает управляющий момент М25_.
325
В результате суммарный момент тангажа М г меняет знак и приращение
угла тангажа уменьшается, САУ Н постепенно возвращает руль высоты
к исходному положению. В момент времени 13, когда приращение угла
тангажа Аи станет эквивалентно отклонению АН, руль высоты вернется
в балансировочное положение 5В(13) = §Во и самолет будет прямолинейно
приближаться к опорной высоте Н0.
Вследствие уменьшения рассогласования АН САУН к моменту времени
14 отклоняет руль высоты в противоположную сторону на положительный
угол 8„ (14). В результате значения угла атаки и подъемной силы становятся
меньше первоначальных значений Аа(14) < а„ и АУ а (1 4 ) < У ао . Под действием отрицательного приращения подъемной силы вектор скорости поворачивается в горизонтальное положение, траектория самолета искривляется в обратном направлении и приращение угла наклона траектории А0
начинает уменьшаться. САУ Н возвращает руль высоты в исходное балансировочное положение § в (1 5 ) = §во' самолет выходит на исходный угол
атаки Аа(1 5 ) = а0 на опорной высоте Н0, а вектор скорости принимает
горизонтальное положение.
Как видно из графиков, процесс устранения начального отклонения Н0
имеет плавный апериодический характер. Качество работы САУН оценивается по времени окончания переходного процесса, полному отсутствию или
малой величине перерегулирования по высоте.
Как следует из изложенного, для плавного выхода самолета на заданную высоту принципиально необходимо присутствие в законе управления
САУН сигнала, пропорционального углу тангажа. Отсутствие сигнала по
ДО
лв
АН
6Г
АН
АН
уел
8ц
уст
АН.
На
МА,
Мг1.
М
МгВ,
Рис. 10.3. Процесс устранения начального отклонения высоты с помощью
системы автоматического управления
326
Рис. 10.4. Процесс устранения системой автоматического управления высотой внешнего ступенчатого моментного возмущения
углу тангажа привело бы к тому, что в течение всего времени устранения
отклонения от заданной высоты САУ Н удерживала бы руль высоты
в отклоненном в одну сторону положении. Тогда имело бы место постепенное приращение подъемной силы и траектория искривлялась все время
в одну сторону. При подходе к заданной высоте вектор скорости был бы не
в горизонтальном положении. Самолет проскочил бы заданную высоту
и процесс стабилизации высоты стал бы колебательным и, может быть,
неустойчивым. Таким образом, сигнал угла тангажа в законе управления
САУН служит для демпфирования траекторных колебаний самолета по
высоте.
На рис. 10.3 не показано изменение во времени скорости тангажа Дсог
и динамического момента демпфирования М^ , так как переходные процессы при стабилизации высоты полета протекают гораздо медленнее
процессов стабилизации угла тангажа. Поэтому приращение скорости
тангажа незначительно.
Рассмотрим процесс устранения САУН с жесткой обратной связью
в сервоприводе внешнего ступенчатого моментного возмущения М гВ . Этот
процесс аналогичен уже рассмотренному в параграфе 9.1 процессу с участием автопилота угла тангажа и представлен на рис. 10.4.
Так как отклонение руля высоты пропорционально отклонению самолета от заданной высоты, то для сохранения в установившемся режиме
постоянного отклонения руля высоты (§в ЛУн )уст> компенсирующего внешний возмущающий момент, необходимо иметь постоянное отклонение
высоты ДН уст . Поэтому
- (М2б,)уст = М2В = - т ' 8 Ьа у- (б?АУн)уст, (6?АУн)уст = к н АНуст .
Тогда
2
М
АН
—
ДН
уст = - - -- - - .
гв
Таким образом, величина ДНУСТ является статической ошибкой регулирования, возникающей под действием возмущающего момента М.^.
Поэтому САУ Н с законом управления (10.1) является статической по
отношению к внешнему ступенчатому возмущающему моменту тангажа.
Для уменьшения величины статической ошибки необходимо увеличивать
передаточный коэффициент к н .
Рассмотрим процесс устранения САУ Н действия постоянного вертикального восходящего потока воздуха (рис. 10.5).
Первоначально самолет увеличивает угол атаки на величину Да„ =
= ^ у /У 0 . Самолет приобретает ускорение вверх по направлению ветра
и его центр масс также начинает следовать по направлению ветра. САУН
отклоняет руль высоты вниз пропорционально возникшему рассогласованию ДН. Это создает отрицательное приращение угла атаки и поворачивает
вектор скорости самолета снова в горизонтальное положение. Одновременно происходит постепенное увеличение приращения угла тангажа.
Вектор скорости будет стремиться принять горизонтальное положение.
Приращение угла атаки становится равным нулю, а угол тангажа -равным
327
АН,
Рис. 10.5. Процесс устранения системой автоматического управления высотой действия постоянного вертикального восходящего потока воздуха
приведенному к ветру углу атаки с обратным знаком-Аа„. Изменение угла
тангажа на величину Аи уст = — Аа^, приведет к появлению на входе САУН
сигнала, который скомпенсируется сигналом отклонения высоты.
Статическая ошибка по высоте определяется следующим образом:
ст
= к ц Ао уст + к„ АН уст = 0, Доуст = -
или
АН уст = —,
к
н
Л
У
Аа„
= — —^.
*н V,,
Таким образом, САУ Н с законом управления (10.1) является статической
по отношению к ступенчатому вертикальному ветровому возмущению.
Если при попадании самолета в вертикальный поток ветра отключать
сигнал, пропорциональный углу тангажа, а для демпфирования использовать только сигнал, пропорциональный АН, то статической ошибки не
будет. Другим способом устранения статической ошибки является пропускание сигнала угла тангажа через изодромный фильтр.
Особенности законов управления. Для дополнительного улучшения
демпфирования продольных траекторных колебаний в закон управления
САУН включают сигнал, пропорциональный скорости изменения высоты.
Тогда закон управления (10.1) трансформируется следующим образом:
*САУ„=
к„АН
кйАН,
(10.7)
где кд-передаточный коэффициент по скорости изменения высоты.
Обычно сигнал, пропорциональный АН, получают дифференцированием сигнала АН в вычислителе САУ Н . Использование для этой цели
вариометров, как датчиков вертикальной скорости, распространения не
получило вследствие их невысокой точности, надежности и значительного
времени запаздывания.
Для устранения статической ошибки применяют изодромную обратную
связь в сервоприводе или вводят в правую часть закона управления сигнал,
пропорциональный интегралу отклонения высоты.
328
Закон управления САУН с изодромной обратной связью в сервоприводе
имеет вид
и
*
1С\_/\.У ьл
1-
,.^
(
1-
«^
1>
Т„р+1
А . . . 1
*тт
(Л (\ О\
ТИр+1
Изодромное звено реализуется с помощью электромеханизма согласования. По сигналу обратной связи это происходит как в автопилоте угла
тангажа. По сигналу угла тангажа реализуется тот же принцип. На входе
сумматора сервопривода подаются два сигнала. Один сигнал пропорционален отклонению текущего угла тангажа от опорного Аи, а второй
сигнал Аи пропущен через электромеханизм согласования с передаточной
функцией апериодического звена и взят с обратным знаком:
Ди-
1
Аи.
Т н р + 1 Аи = ^
Т И р^
+1
(10.9)
Структурная схема аналоговой электромеханической САУ Н с изодромной обратной связью в сервоприводе представлена на рис. 10.6. Так
реализуется режим стабилизации барометрической высоты в системах
САУ-62 и САУ-86.
Закон управления САУ Н , реализующей принцип ПИД-управления,
имеет следующий вид:
к н АН
Т„р+1
АН
— АН,
р
(10.10)
где К|Н- передаточный коэффициент по интегралу рассогласования высоты.
Интегральная составляющая закона управления (10.7) получается пропусканием сигнала АН через электромеханический интегрирующий привод
с передаточной функцией XVип (р) = 1с|н/рСтруктурная схема аналоговой электрогидравлической САУН с ПИДуправлением представлена на рис. 10.7. Если поделить левую и правую
Рис. 10.6. Структурная схема системы автоматического управления высотой с изодромной обратной связью в сервоприводе
329
Рис. 10.7. Структурная схема
системы
автоматического
управления высотой с ПИДуправлением
части закона управления (10.7) на Т я р/(Т и р+ 1), можно увидеть почти
полную эквивалентность этого закона закону управления (10.6) с точностью
до составляющей АН. Поэтому реакция той и другой САУН на внешний
ступенчатый момент тангажа будет почти одинаковой. Так работает
система АБСУ-154.
С переходом на непосредственное автоматическое управление продольным движением центра масс самолета управление высотой стремятся
осуществить через контур нормальной перегрузки. Тогда
ГУ" = 4ю* + ^Дп у (Ап у - (Ап у ) зад ),
(Ап )зад = к" (Нзад - Н) - к„Ао,
(10.11)
где 1сДп -передаточный коэффициент по высоте в контуре нормальной перегрузки.
Цифроаналоговые системы автоматического управления. Такая система
(рис. 10.8) имеет аналоговый электрогидравлический сервопривод. Датчиком высотно-скоростных параметНза1
пи
ров движения самолета является
цифровая система воздушных сигЫ
налов СВС, вырабатывающая в
V
виде последовательного биполярТ
°' » Г775
ИНС
йПу
ного кода сигнал, пропорциональа„ ' БВУП
ный Н. Датчик параметров про0<о
гп
* у
дольного короткопериодического
движения самолета - инерциальная
Н
СВС
навигационная система ИНС, вырабатываюшая в виде последовалт
"1ш^
тельного биполярного кода сигналы,
пропорциональные со2, о, у,
Рис. 10.8. Функциональная схема цифАп у , У у , а у . Эти сигналы, а также
роаналоговой системы автоматического управления высотой
сигналы и разовые команды от
г
х
У
330
других датчиков и систем принимает цифровой блок вычислителя управления полетом БВУП. Значение заданной высоты формируется пилотом
с пульта управления ПУ. В блоке БВУП осуществляется обнуление и запоминание текущего значения барометрической высоты в режиме согласования, а также формируется аналоговый управляющий сигнал и„ на вход
сервопривода в режимах стабилизации и управления высотой.
Закон управления цифроаналоговой САУ в режиме стабилизации
и управления барометрической высотой выглядит следующим образом:
а в + а?)
,
СО8 у
Т„2р+1 Тпр+1
, ствн = к н [(Н - Н 0 ) - Нзад] + к Уу У у + ка ау,
У
бал
-м-.
/А
бал
о
\
<?„ = г 6ал (Дп у , а в , бзак).
Назначения и структура составляющих закона управления по угловой
со,
у
^
бал
скорости тангажа ств , углу крена ств и балансировке ств аналогичны
назначению и структуре составляющих закона управления цифроаналогового автопилота угла тангажа.
Составляющая закона управления по избыточной нормальной перегрузке ав"' обеспечивает управление углом тангажа через контур нормальной перегрузки без статических ошибок благодаря наличию изодромного
звена с постоянной времени Т п .
Составляющая закона управления по высоте а" обеспечивает управление продольной траекторией полета самолета. Для улучшения качества
переходных процессов она содержит также сигналы, пропорциональные
вертикальной скорости У у и вертикальному ускорению а у .
Структурная схема САУНпу, реализующей закон управления (10.12)
представлена на рис. 10.9. Так работает САУ-96. В САУ-204 формируется
только сигнал, пропорциональный (Апу)эад. Формирование разности
(пу — (Апу)зад) и управления на руль высоты осуществляется в АСШУ-204.
Функциональная схема цифроаналоговой САУау представлена на
рис. 10.10. Заданное значение нормального ускорения формирует вычислительная система самолетовождения ВСС. В структурной схеме рис. 9.14 при
включении режима полета по сигналам ВСС выключатель переходит
в положение «ВСС».
Эксплуатационные особенности. Пассивные и активные отказы САУ Н
в контуре сервопривода и тангажа по последствиям аналогичны соответствующим отказам автопилота угла тангажа. Кроме того, они приводят
к отключению режима автоматической стабилизации и управления высотой. Пассивный отказ по сигналу угла тангажа приводит к потере демпф!^
рования продольных траекторных колебаний самолета по высоте. Пассив-' "''
331
Рис. 10.9. Структурная схема цифроаналоговой системы автоматического управления высотой
ный отказ по сигналу отклонения самолета от заданной высоты приводит
к потере режима стабилизации высоты и САУ Н начинает работать как
автопилот утла тангажа.
Отказ САУН по цепи согласования текущей высоты и получения
опорного значения высоты может сопровождаться грубым включением
режима с недопустимо большими отклонениями рулей высоты.
Погрешность измерения угловой скорости сох в виде дрейфа нуля
еЮг приводит к появлению статической ошибки по высоте, определяемой из
закона управления (10.1):
При типичных значениях передаточных чисел 1см = 0,5, к н = 0,02 и величине дрейфа Е Ш = Г/с установившаяся ошибка по высоте достигает 25 м.
и
" 1-
инс
вес
ДПЗ
332
т
а
и в,
ЛЛу*
(Оу)зоЭ
и&ик^
БВУП
ие?
СПб,
СПу>
Рис. 10.10. Функциональная схема
цифроаналоговой системы управления
нормальным ускорением
Погрешность измерения угла тангажа Е„ приводит к появлению статической ошибки по высоте, определяемой из закона управления (10.1):
еи - к н АНуст = О, ДНуст = еи —.
При ЕЦ = Г установившаяся ошибка по высоте достигает 50 м.
Неточность измерения высоты ен полностью переходит в установившуюся ошибку стабилизации высоты. Такие ошибки для современных
аналоговых корректоров высоты составляют до 0,1% от диапазона измерения высоты, т.е. до 10 м на высоте 10 км^
Зона нечувствительности сервопривода руля высоты, приведенная к углу
тангажа и составляющая до 0,5°, приводит к статическим ошибкам по
высоте до 30 м. Таким образом, суммарная погрешность стабилизации
высоты с помощью САУ Н может достигать десятков метров. Разрегулировки передаточных коэффициентов закона управления снижают качество
переходных процессов и точность управления.
10.1.2. Моделирование управления продольным
траекторным движением самолета на маршруте
Реакция замкнутой системы «самолет - САУ н » на управляющие воздействия. Дополним модель вынужденного продольного короткопериодического
движения самолета (3.19) уравнением траекторного движения самолета по
высоте. Пусть управляющее воздействие на руль высоты создает САУ Н .
Управляющее воздействие по высоте формируется пилотом с помощью
задатчика высоты с пульта управления САУ Н . Тогда модель замкнутой
системы «самолет-САУн» будет содержать уравнение состояния, уравнения выхода и входа, а также закон управления САУН:
(10.14)
(10.15)
(10.16)
а
шг,а
Дш2(1)
где хшт(1) =
Да(1)
До(1)
АН (I)
А пкт
О
О
О
О
О
О
О
Н,а
1н„
О
—
—
а
333
Получим вектор передаточных функций замкнутой системы «самолет-САУ Н » по параметрам продольного короткопериодического и траекторного движения на управляющее воздействие по высоте
АН зад (р)
(10.17)
Переходная матрица состояния по параметрам продольного короткопериодического и траекторного движения самолета при включенной САУН
Переходную матрицу состояния ФпиУ" (р) определим следующим образом:
/ фСАУ н /_\ 1
Л»САУ„ /„ч _ I ^1«т
\У> I
>^ У Н(Р)|'
у
где {Ф^ н(р)}пд-присоединенная матрица.
Определитель матрицы
Р - а»,^ н
- аш ,5 к и
- а ш ,а
-аи,5 ^
-аа1/
р-а„
0
0
- ац,Шг
0
Р
0
0
- ан,а
~~ н,а
а
р
'
= р4 + А§ А У нр 3 + А$ АУ н р2 + А? А У н р + А^ А У н = Д С А У н (р),
А2
САУН_
334
Л
АПо
Н
—
,, дт
* АПии
дт 22
= А,
= (сок Ч) Ч
,
,и
,Н
„ ки —
АО
—
.САУ
(фпкт "(Р)}пр- присоединенная матрица.
Так как вектор входа по управляющим воздействиям В*кт содержит
только один ненулевой элемент а Ш г § _, определим в присоединенной матрице
{ФПкт "(р)}п Р только первый столёец:
САУ
{Фпкт "(Р)}
2
а
Р (Р~ а,а)
т
=
А САУн (р)
А САУн (р)
А САУн (р)
А САУ "(Р)
Вектор передаточных функций имеет вид
2
А САУ »(Р)
Р ^а,е>1 ащг,5.
н
«
"
АСАУ«(Р)
н
Р а ао) Др — а а о )а г а 1 § 1 К 1 ) к 1 )
АСАУ"(Р)
[(аа,ю, н,а + аи1ш2 а н „) р — а и(0г а н „ а аа] а Шг8
а
А САУ "(р).
или
4
» САУ„
р4 + А 3
. САУ„
р3 + А 2
ч
,
л САУ„
р + А,
2
САУ„
4
л
. САУ„
,
. САУ„
р3 + А 2
А
(10.18)
-,
(Ю.19)
,
(10.20)
2
р
Нр2+
р4 + А 3
,
САУ„н
р + АО
,
дСАУ Н р
. САУ„
р + А,
2
,
САУ„
р + А0
А
"
335
К
-(р)
где В
н
В4
САУ„
= - ^ - ^^ - ,
Ун
3
2
р* + А™ Р + АГ ' Р + АГ" р + АГ -
,
, Н в „САУн . .
+ ао,шг анд,) атг,5. кД и > о
Т,
И
( р ) = -аЩг15в1сД", В^ЛУ"(р) = ашЛаа>а1си1(", В,
.
САУ
САУ„
.
УН
(10.21)
(р) = - (аал ан,а +
. Н
(р) = аи^ ан>1) а шЛ а0>а 1с „ 1си ,
(Р) = а<0г,5.аа>0)111с1)11с1).
Н
Н / Л
Сворачивая структурную схему замкнутой системы «самолет - САУН»
(рис. 10.11) методами структурных преобразований, можно получить передаточную функцию (10.21).
Рассмотрим условия устойчивости замкнутой системы «самолетСАУН» по критерию Гурвица:
А!
" = &(аг,&.^и(аи,шгаа,а ~ аа,й, аН,а ^1> ~ ач,0)2 аН,и ^1) ) > 0 .
Ао А У и = а^.а^ан^а^кД? > 0,
Д
САУ Н Д САУ Н _ А САУ„
>
А
САУ„ Д САУ„ А САУ„ _
(Д
(10.22)
САУ Н ) 2 _
-(А^ А У ») 2 А 0 С А У »>0.
«I
Правильным выбором передаточных коэффициентов кШ1, 1с„ и 1с„ добиваются выполнения условий (10.22), а также обеспечиваются требуемые
запасы устойчивости.
Рассмотрим реакцию замкнутой системы «самолет -САУН» на ступенчатое отклонение пилотом рукоятки задатчика высоты. После окончания
переходных процессов приращения установившихся значений параметров
продольного короткопериодического движения примут нулевые значения:
(Аю2)уст = Нт [р АНзад(р) \Уд ш " д (р)] = О,
Аауст = Нт [р АНзад (р) \У4"»-(р)] = О,
А
Ао зад = Нт [р АН зад (р) \У "'"(р)] = О
и произойдет формирование нового установившегося значения высоты
АН уст = Нт [р АНзад (р) \У4н"« (р)] =
336
= Нт
Г РДНза
дСАУ Н р 3
А
САУ Н р 2
вСАУ„
= АН з
, САУ„
Переходный процесс по высоте определяется переходной функцией
АН(р) =
ад
(В,
"Р + ВО
")
А? А У »р
. (10.23)
Привести (10.23) к табличному виду затруднительно. Поэтому для
получения переходного процесса целесообразно использовать ЭВМ.
Реакция замкнутой системы «самолет САУ,,» на внешние возмущения.
Рассмотрим модель вынужденного продольного движения самолета, управляемого САУ Н , при наличии внешних возмущений:
х„„ (I) = Ап„ х мт (I) + ВХ„ „и (г) + В^т и'т (г),
(10.24)
Упкт(1) = хп„(1),
(10.25)
и^„(1) = 5вЛУн(1),
(10.26)
5в ЛУ " (I) = В^У" УпктМ.
(10.27)
где вектор входа и°кт(1) и матрица входа В'кт определяются выражениями (3.148)
и (3.149).
Получим матрицу передаточных функций замкнутой системы «самолет-САУн » по параметрам продольного короткопериодического и траекторного движения самолета на внешние возмущения
1
п„ (Р) =
В»„ = Ф^Атун (р) Ввтт . (10.28)
Определим в качестве примера вектор передаточных функций на внешний момент тангажа Лт^,:
-,САУН
^-,САУн-|
(10.29)
йНзад.
Рис. 10.11. Структурная схема замкнутой системы «самолет-система автоматического управления высотой»
337
(10.30)
(10.31)
САУ„
(10.32)
где
/"•А у
С4
"(Р)= -а^^а^а^,
рСАУн / ч _ _ /•
,
САУ
С3
"(р) = - аШг,„1в,
\
САУн
С2
(р) =
^САУ„ , , _
Рассмотрим реакцию системы на ступенчатый внешний момент тангажа
Атгв(р) = Атгв/р. Тогда после окончания переходных процессов останется
статическая ошибка по высоте
АО
Г
ДН„
СТ = шп
" Р + Со
Ат2В = - =АО
Следовательно, САУ Н с законом управления (10.1) является статической
по отношению к внешнему ступенчатому моментному возмущению по
тангажу. Увеличение передаточного коэффициента к„ способствует уменьшению величины статической ошибки.
Для доказательства астатизма законов управления САУ Н с изодромной
обратной связью в сервоприводе или интегральной составляющей по
высоте можно провести аналогичное исследование.
10.2. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ БОКОВЫМ
ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕ
10.2.1. Системы автоматического управления боковым
траекторным движением на маршруте
Принцип действия. При длительном полете в условиях действия бокового ветра самолет «сносится» ветром с линии заданного пути. Этому не
может препятствовать автопилот курса, который стабилизирует положение
продольной оси самолета в горизонтальной плоскости. Для стабилизации
338
"г
ЧЧ>к
ВАПГ
ПНП
I Чй^
ВСМп
итзйд
исос
ижае
ДИСС
Рис. 10.12. Функциональная схема системы автоматического управления курсом
с учетом угла сноса
самолета на ЛЗП необходимо стабилизировать не продольную ось самолета, а положение вектора путевой скорости У п . Тогда продольная ось
самолета должна быть развернута навстречу ветру на угол сноса.
Углом сноса (Зсн называется угол, заключенный между горизонтальной
проекцией вектора воздушной скорости V и вектором путевой скорости41*
V п . Он отсчитывается вправо (положительный Р сн ) и влево (отрицательный Р сн ) от вектора V и определяется как отношение значения боковой
составляющей ветра XV2 к значению воздушной скорости V: рсн = \У 7 /У.
Система автоматического управления курсом с учетом угла сноса
(САУур} обеспечивает стабилизацию и управление боковым траекторным
движением самолета в крейсерском полете путем отклонения элеронов при
возникновении рассогласования между текущим и заданным значениями
курса с учетом значения угла сноса.
Типовой закон управления САУ в режиме стабилизации и управления
курсом с учетом угла сноса имеет вид:
- К Ш1 + К у (у - Узад ) , Узад = Ц (Ауз, - Рсн), ДЧ/зк = Узк - V* ^ ^
В состав системы входят (рис. 10.12) датчик угловой скорости крена
ДУС, датчик угла крена-гировертикаль ГВ, датчик курса-курсовая система КС, задатчик курса ЗК, датчик угла сноса-доплеровский измеритель
скорости и угла сноса ДИСС, формирователь рассогласования между
текущим и заданным значениями курса с учетом угла сноса-пилотажнонавигационный прибор ПНП, формирователь приращения заданного угла
крена-вычислитель ВСАУ^р, вычислитель автопилота ВАЩ, усилитель
У и рулевая машина элеронов РМоэ.
Система работает следующим образом. Пусть до включения этого
режима САУ работала в автопилотных режимах стабилизации курса или
управления заданным курсом, как это было описано в параграфе 9.3.
Продольная ось самолета удерживалась на ЛЗП, текущий курс самолета
равнялся заданному и и^ = и^. После включения режима стабилизации
курса с учетом угла сноса при появлении бокового ветра ДИСС вырабатывает сигнал, пропорциональный возникающему углу сноса ир^. В результа339
/
ю
Рис. 10.13. Азимуты маяка и самолета
те ПНП формирует сигнал ид^м =
= и,, — и ж> ± Ирс11, который в вычислителе ВСАУур преобразуется в сигнал и7м , пропорциональный заданному углу крена. Этот сигнал отрабатывается сервоприводом элеронов.
Самолет входит в крен, пропорциональный углу сноса, и под действием
сигнала и т с гировертикали элероны
возвращаются в нейтральное положение. Самолет начинает разворачиваться в стор()ну
действия
ветра до
тех пор, пока разность сигналов
иф — и^, не уравновесит сигнал и р . Тогда сигнал с ПНП станет равным
нулю ид"ж = 0 и под действием сигнала с гировертикали иу сервопривод
отклонит "элероны в обратную сторону. Самолет выйдет из крена и продолжит прямолинейное движение без угла сноса.
Задача стабилизации самолета на ЛЗП в условиях близости радиомаяков может решаться с помощью соответствующих радиотехнических
систем навигации (РТСН). Международная РТСН УОК обеспечивает
непрерывное измерение азимута радиомаяка и самолета.
Азимутом маяка Л м называется угол, отсчитанный по часовой стрелке
от северного направления магнитного меридиана до направления от
самолета на маяк (рис. 10.13). Азимутом самолета Ас называется угол,
отсчитанный по часовой стрелке от северного направления магнитного
меридиана до направления от маяка на самолет.
Система автоматического управления отклонением от заданного азимута (СЛУдд) обеспечивает стабилизацию и управление боковым траекторным движением самолета в крейсерском полете путем отклонения
элеронов при отклонении самолета от заданного азимута.
Закон управления САУ в режиме стабилизации заданного азимута
имеет следующий вид:
.,..,..
(10.34)
узад = к* ДУ1/ЗК +'к ДА - к?"" Рсн, ДУзк = V - Узк, ДА = А м - Азад ,
где А М) А м д - соответственно текущее и заданное значения азимута маяка;
ДА - отклонение от заданного азимута; к у -передаточный коэффициент по углу
крена к отклонению от заданного азимута, определяющий, каким углом крена
должен компенсировать самолет отклонение Г по азимуту; Ц"1- передаточный
коэффициент по углу крена к углу сноса.
В состав электрогидравлической САУ ДА (рис. 10.14) входят датчик
угловой скорости крена ДУС, датчик угла крена - гировертикаль ГВ, датчик
курса -курсовая система КС, задатчик курса ЗК, датчик отклонения от
заданного азимута -радиотехническая система навигации РТСН, датчик
угла сноса - доплеровский измеритель скорости и угла сноса ДИСС,
формирователь отклонения текущего курса от заданного -пилотажно-на340
вигационный прибор ПНП, формирователь приращения заданного угла
крена-вычислитель ЯСЛУДА, вычислитель автопилота с сумматором
и усилителем сервопривода и рулевой агрегат элеронов РА5Э.
Система работает следующим образом. Перед включением режима
пилот вручную с помощью задатчика курса устанавливает заданный курс,
а с помощью селектора азимута РТСН - заданный азимут линии пути.
После включения режима стабилизации заданного азимута самолет разворачивается на заданный курс. При этом САУдд сначала работает как
автопилот курса перекрестной схемы в режиме управления заданным
курсом, а затем как САУ^р. Вектор путевой скорости самолета совмещается с направлением линии заданного пути на радиомаяк.
При отклонении самолета от заданного азимута, определяющего
ЛЗП, РТСН вырабатывает сигнал, пропорциональный этому отклонению идд.
Вычислитель ВСАУДА формирует сигнал приращения заданного угла
крена и Ду . Этот сигнал отрабатывается сервоприводом элеронов, и самолет входит в крен, пропорциональный отклонению от заданного азимута.
Под действием сигнала с гировертикали иу элероны возвращаются в
нейтральное положение. Самолет разворачивается в сторону ЛЗП до тех
пор, пока сигнал иДА с РТСН не станет равным нулю. Тогда под действием
сигнала с гировертикали иу сервопривод отклоняет элероны в обратную
сторону. Самолет выходит из крена и продолжает прямолинейное движение по ЛЗП.
Сигнал и Ду , формируемый ПНП, выполняет функции демпфирования
траекторных колебаний самолета. Сигнал и р с ДИСС компенсирует
действие бокового ветра и способствует управлению положением вектора
путевой скорости относительно ЛЗП.
Задача стабилизации самолета на ЛЗП может решаться путем управления путевым углом с использованием навигационного вычислителя. Вычислитель определяет в каждый момент времени заданный путевой угол
ортодромии, соединяющей место нахождения самолета и заданный пункт
маршрута.
гв
иг
КС
ДАПу
зк
РТСН
ВСАУдА
Рис. 10.14. Функциональная схема системы автоматического управления отклонением от заданного азимута
341
Рис. 10.15. Функциональная схема системы автоматического управления путевым
углом
Система автоматического управления путевым углом (САУу^ ) обеспечивает стабилизацию и управление боковым траекторным движением
самолета в крейсерском полете путем отклонения элеронов при отклонении
самолета от заданного путевого угла.
Закон управления САУ в режиме управления путевым углом имеет
следующий вид:
= к.ш сох
Ду-УзадХ
Узад = ^ (Узлу- VI - Р с н ) ,
(10.35)
где \(/ з п у -заданный путевой угол.
Система (рис. 10.15) работает следующим образом. При включении
навигационного вычислителя в режим полета по кратчайшему расстоянию
он начинает формировать сигнал иу , пропорциональный заданному
путевому углу. Тогда САУ^ отрабатывает этот сигнал как САУ^/р. При
этом вектор путевой скорости, направленный вдоль траектории кратчайшего расстояния, обеспечивает стабилизацию центра масс на этой траектории.
При действии на самолет внешних возмущений он отклоняется от линии
заданного пути (ЛЗП), так как не является устойчивым в боковом траекторном движении. Для стабилизации самолета на ЛЗП пилот, наблюдая за
изменением бокового отклонения по прибору, воздействует на баранку
штурвала и отклоняет элероны таким образом, чтобы самолет удерживался
на ЛЗП или переходил с одной ЛЗП на другую. Системы автоматического
управления боковым отклонением самолета от ЛЗП служат для освобождения пилота от необходимости ручной стабилизации и управления самолетом на траектории в горизонтальной плоскости.
Система автоматического управления линейным боковым отклонением
самолета от ЛЗП (САУ2) обеспечивает стабилизацию и управление
боковым траекторным движением самолета в крейсерском полете и во
время предпосадочного маневра путем отклонения элеронов при возникновении линейного бокового отклонения самолета от ЛЗП.
Простейшая САУг реализует следующий закон управления элеронами:
5-САУ2
о,
342
,
= кг,
Узад)>
Узад —
(10.36)
где у, у мд - соответственно текущее и заданное значения угла крена; к у - передаточный коэффициент по углу крена на линейное боковое отклонение, определяющий, на
сколько должен измениться угол крена при появлении линейного бокового отклонения от ЛЗП в 1 м.
В состав аналоговой электромеханической САУ2 (рис. 10.16) входят
датчик угловой скорости крена ДУС, датчик угла крена-гировертикаль ГВ,
датчик путевой скорости и угла сноса ДИСС, датчик курса-курсовая
система КС, датчик воздушной скорости-система воздушных сигналов
СВС, датчик положения самолета относительно наземного радиомаяка радиотехническая система ближней навигации РСБН, навигационный вычислитель НВ бокового отклонения самолета от ЛЗП, вычислитель
заданного угла крена ВСАУ„ вычислитель автопилота ВАПу, усилитель
У и рулевая машина РМЬ3.
САУг работает следующим образом. Навигационный вычислитель НВ,
используя какой-либо метод счисления пути, непрерывно определяет координаты местоположения самолета в частноортодромической системе координат. При включении САУ в режим стабилизации полета по ЛЗП на вход
вычислителя ВСАУХ поступает сигнал иг, пропорциональный боковому
отклонению самолета от ЛЗП. Вычислитель формирует сигнал и , пропорциональный заданному углу крена, который подается на серво'привод
элеронов СШЭ и вызывает отработку вала рулевой машины. Отработка
происходит до тех пор, пока сигнал обратной связи и жос не уравновесит на
входе сумматора С сигнал иу . Самолет изменит угол крена и под
действием сигнала текущего угла крена с гировертикали иу сервопривод
вернет элероны в балансировочное положение. Самолет начнет разворачиваться в сторону ЛЗП с углом крена, пропорциональным боковому
отклонению. Это отклонение будет уменьшаться, а вместе с ним будет
уменьшаться и сигнал иг с НВ. Равновесие сигналов иу и иу нарушится
и сервопривод будет отрабатывать элероны в обратную сторону. Самолет
выходит из крена в тот момент, когда 2 = 0.
Управление движением. Рассмотрим процесс устранения воздействия
постоянного бокового ветра с помощью САУ^р. В этом случае самолет
Рис. 10.16. Функциональная схема системы автоматического управления линейным
боковым отклонением от линии заданного пути
343
войдет в крен, противоположный направлению ветра, с последующим
разворотом его по курсу на угол Ах)/,, = Р сн . Статическая погрешность
стабилизации вектора путевой скорости на ЛЗП будет определяться моментом поперечной статической устойчивости самолета М х р. В установившемся полете, когда угол сноса становится равным углу скольжения
Рсн = — Р, этот момент определяется следующим образом:
к
ОУ
2
в
0У
2
Мхр = т х р 5 1 - р = - т х Р 5 1 р с н .
(10.37)
При этом самолет получает тенденцию к повороту продольной оси
в направлении действия ветра. Для устранения этой тенденции САУ\|/Р
должна отклонить элероны на определенный угол, чтобы компенсировать
момент поперечной статической устойчивости:
м
3 =т
«. 81 РХ! 5 = м
2
Отсюда можно определить с учетом (10.37) потребное отклонение
элеронов
т
6Э =
р
б
р сн .
тх э
Такое отклонение элеронов может быть обеспечено САУ^р согласно
закону управления (10.33) для установившегося режима
(8ЭЛ
)уст = Ц, к*" (\|/зк — \|/к — РСН) .
(10.38)
Статическая погрешность стабилизации вектора путевой скорости
— т-*0
V•
уст
Кроме того, в установившемся режиме должно соблюдаться условие
п = 0. Тогда боковая сила 2В, вызванная углом скольжения, должна быть
скомпенсирована проекцией аэродинамической подъемной силы, возникающей при крене 2у = У а зт у. При этом потребный угол крена самолета
определяется из условия компенсации
Учитывая, что угол крена у при этом невелик, получим
с,Р
с,Р
Ууст = — Р= - — РснС
344
У„
С
У„
(Ю.39)
Подставим (10.39) в закон управления (10.33) с учетом (10.38)
_
,
к
уст — ~~ у
г„
Рс
Таким образом, САУ^р с законом управления (10.33) стабилизирует
вектор путевой скорости на ЛЗП с некоторой статической ошибкой,
значение которой зависит от угла сноса.
Рассмотрим процесс устранения положительного начального линейного
отклонения самолета от ЛЗП с помощью САУг (рис. 10.17). Будем считать,
что в начальный момент времени 10 самолет летит без скольжения Р = О,
элероны находятся в нейтральном положении 5Э(10) = 0. Отрицательное
линейное боковое отклонение 2 в момент времени 11 при включении САУ
начинает парироваться отклонением элеронов на отрицательный угол
бдО^). Положительный управляющий момент крена М хй вызывает положительное приращение углов крена и скольжения. В результате появляется
положительное приращение боковой силы А2, которая поворачивает
вектор скорости в сторону ЛЗП. Траектория полета самолета искривляется.
Изменение угла скольжения вызывает появление отрицательного статического момента М х р, который в момент времени 12 уравновешивает
управляющий момент М х 5 . В резуль- &
тате суммарный момент крена М х ^
меняет знак и приращение угла крена
уменьшается. САУг в момент времени 13 возвращает элероны в нейтральное положение 8Э (1Э) = 0 и самолет
прямолинейно приближается к ЛЗП.
Вследствие уменьшения значения г
САУг к моменту времени 14 отклоняет элероны в противоположную сторону на положительный угол 5Э(14).
Боковая сила меняет знак и вектор
скорости поворачивается в горизонтальной
плоскости.
Постепенно
САУг возвращает элероны в нейтральное положение 6Э(15) = 0 и самолет выходит на ЛЗП.
Как видно из графиков, идеальный процесс устранения начального
отклонения 2 имеет плавный апериодический характер. Качество работы
САУ г оценивается по времени окончания переходного процесса, полному
пт^тгтпишипимяпп^чняченшотте
отсутствию или малому значению перерегулирования по боковому отклоН6НИЮ.
Рис. 10.17.
Процесс устранения найного бокового отклонения с помощью системы автоматического управления
чального
лине
345
Как следует из изложенного, для
плавного вывода самолета на ЛЗП
принципиально необходимо присутствие в законе управления САУ 2 сигнала, пропорционального углу крена.
Отсутствие этого сигнала привело бы
к тому, что в течение всего времени
устранения отклонения от ЛЗП САУг
удерживала бы элероны в отклоненном в одну сторону положении. Тогда при подходе к ЛЗП вектор скорости не совпадал бы с направлением
ЛЗП и самолет проскочил бы ЛЗП.
Рис. 10.18. Процесс устранения начального линейного бокового отклоПроцесс носил бы колебательный ханения с помощью системы автоматирактер. Таким образом, сигнал угла
ческого управления с пропорциональкрена в законе управления САУ г слуно-дифференциальным управлением
жит для демпфирования боковых траекторных колебаний самолета.
Для получения переходных процессов хорошего качества в закон управления САУ2 дополнительно вводят сигнал, пропорциональный скорости
линейного бокового отклонения 2. Тогда приращение заданного значения
угла крена определяется следующим образом:
Ду з а д = - к * 2 - Ц 2 ,
(10.40)
где 1су-передаточный коэффициент по углу крена при изменении скорости линейного
бокового отклонения.
Рассмотрим процесс устранения начального линейного отклонения
самолета от ЛЗП г с помощью САУ г с пропорционально-дифференциальным управлением (10.40), представленный на рис. 10.18. При
включении САУ в момент времени (^ элероны отклоняются на отрицательный угол б.,^), пропорциональный величине 2. Положительный
управляющий момент крена Мх5 вызывает положительное приращение
углов крена и скольжения. Самолет разворачивается в сторону ЛЗП
и появляется скорость бокового отклонения 2 положительного знака.
В момент времени, 1 2 , когда установится равновесие сигналов, пропорциональных 2, 2 и Ду, САУг вернет элероны в нейтральное положение
§э(12) = 0. Самолет с определенным углом крена продолжит разворот
в сторону ЛЗП, увеличивая скорость 2. К моменту времени 13 САУ г
отклонит элероны на положительный угол §э(13) и самолет будет выходить из крена.
Когда скорость отклонения г станет эквивалентна отклонению 2, самолет выйдет из крена и элероны установятся в нейтральное положение
8э(и) — О- Дальнейшее уменьшение 2 вызовет отклонение элеронов на
положительный угол §э(15). Это приведет к крену самолета в сторону,
противоположную ЛЗП. В момент времени 1 6 , когда установится равновесие сигналов, пропорциональных 2, 2 и Ду, САУг вернет элероны
в нейтральное положение 8Э(16) = 0. Самолет с определенным углом крена
346
разворачивается от ЛЗП, уменьшая скорость 2. К моменту времени 17
САУг отклонит элероны на отрицательный угол 5Э(17) и самолет будет
выходить из крена. Плавное уменьшение сигналов, пропорциональных г,
2 и Ау, вызовет отработку элеронов в нейтральное положение 8Э(18) = 0.
Таким образом осуществляется з-образный апериодический вывод самолета на ЛЗП без перерегулирования. Рассмотрим процесс устранения САУ2
действия постоянного бокового ветра, представленный на рис. 10.19.
Первоначально самолет увеличивает угол скольжения на величину
АР„ = ^2/%, . Самолет приобретает боковое ускорение по направлению
ветра и его центр масс также начинает следовать по направлению ветра.
САУг отклоняет элероны пропорционально возникшему рассогласованию
2. Это создает отрицательное приращение угла скольжения и поворачивает
вектор скорости самолета снова в горизонтальное положение. Одновременно происходит увеличение приращения углов крена и рыскания. Приращение угла скольжения становится равным нулю, а угол рыскания равным приведенному к ветру углу скольжения с обратным знаком -АР Ж .
Изменение угла крена вызовет сначала возвращение элеронов в нейтральное положение, а затем отклонение элеронов в противоположную сторону. По мере нарастания г элероны вновь будут возвращены в нейтральное положение. Таким образом, САУг с законом управления (10.36)
является статической по отношению к ступенчатому боковому ветру.
Если начальное боковое отклонение в момент включения режима стабилизации на ЛЗП превышает определенное значение 2тах , то сигнал,
пропорциональный 2, будет ограничен определенным постоянным значением к* 2тах . Самолет войдет в крен, не превышающий заданный, и будет
разворачиваться в сторону ЛЗП до тех пор, пока сумма сигналов от двух
переменных управления 2 и 2, имеющих при сближении с ЛЗП разные знаки,
не станет равной нулю. Тогда самолет будет подходить к ЛЗП при нулевом
угле крена с некоторым углом сближения
Когда самолет подойдет к ЛЗП на расстояние г < 2 тах , сигнал по
скорости сближения к* 2 станет по абсолютному значению больше сиг-
Рис. 10.19. Процесс устранения системой автоматического управления линейным
боковым отклонением действия постоянного бокового ветра
347
Рис. 10.20. Структурная схема САУ-62 в режиме автоматической стабилизации и управления курсом с учетом угла сноса
Рис. 10.21. Структурная схема САУ-154 в режиме автоматического полета по сигналам УОК
Рис. 10.22. Структурная схема САУ-154 в режиме автоматического полета по сигналам НВУ
нала Ц г и самолет войдет в обратный крен, постепенно приближаясь
к ЛЗП
Особенности законов управления. Режим автоматической стабилизации
и управления курсом с учетом утла сноса предусмотрен в системе САУ-62
(рис. 10.20). Закон управления имеет следующий вид:
5 Э = к ю > со х
(10.41)
Аналогичным образом построена система САУ-86. Отличие заключается в схеме формирования заданного курса, в которой задатчик курса
размещается на пульте управления. В качестве датчиков угла крена и курса
используются инерциальная курсовертикаль (ИКВ) и базовая система курса
и вертикали (БСКВ).
Режим автоматического управления отклонением от заданного азимута
предусмотрен в системе САУ-154 (рис. 10.21). Закон управления можно
представить так:
Т
о>,Р
1
§з = 14 - ю х + к у Р Д у [Р т у - Р - - — -у м я ] ,
р+
ТИ оР+
1
?
- +
(10.42)
"У- = ^Т^Г-^ТТ^^з,
- V.) + Р^--|—
гАА + к?» - - - рсн ,
Т
Т
*Р+ !
ТАР+ 1
Т р р+ 1
где Р т , Рду, Р^зад' Р^- нелинейные звенья с насыщением, обеспечивающие ограничение управляющих сигналов; Т^, Т у , Т А , Тр -постоянные времени апериодических фильтров.
Закон управления системы САУ-62 в режиме автоматического управления путевым углом имеет следующий вид:
у - Ру-- — — , у зад =
(х|/
,, _
(10.43)ч
н)
ТТ
+ 1 « ~ ^ ~ Р' '
Чтобы не допустить формирования слишком больших управляющих
воздействий на элероны при значительных отклонениях самолета от ЛЗП,
в законах управления САУг применяются ограничивающие звенья с линейным ростом сигнала в рабочей зоне управления и насыщением за пределами этой зоны.
349
вес
Шх
ИНС
Рис. 10.23. Функциональная схема
цифроаналоговой системы автоматического управления боковым траекторным движением самолета на маршруте
ГзоЭ
г,
СПдэ
БВУП
„г ^
ие
СП$н
Пг ^
Кроме того, сигнал приращения заданного угла крена пропускается
через высокочастотный апериодический фильтр с постоянной времени Т т .
Тогда составляющая закона управления САУ 2
Узад =
[ Р (2) + Р (2) ] ,
(10.44)
-Цт,
где Р(г) =
Р(2) =
2>2„
Таким образом обеспечивается автоматическая стабилизация с помощью САУ-154 (рие. 10.22).
Цифроаналоговые системы автоматического управления боковым траскторным движением самолета на маршруте. В современных цифровых пилотажно-навигационных комплексах формирование траектории полета в боковой плоскости осуществляется в вычислительной системе самолетовождения (ВСС). Эта система - задатчик угла крена. Формирование закона
управления элеронами осуществляется в блоке вычислителя управления
полетом БВУП (рис. 10.23). Датчиком угловой скорости крена, утла крена
и боковой перегрузки является инерциальная система ИНС. В структурной
схеме (см. рис. 9.22) на вход сумматора 1 в режиме полета по сигналам ВСС
подается сигнал заданного крена у 3 а д -
10.2.2. Моделирование управления боковым траекторным
движением на маршруте
Дополним модель быстрого бокового движения самолета уравнениями
траекторного движения по углу рыскания и боковому отклонению. Пусть
управляющее воздействие на элероны формирует САУ2. Тогда модель
замкнутой системы «самолет-САУг» при наличии внешних возмущений
можно определить следующим образом:
х6кт(1) = А 6кт х 6кт (1)
(10.45)
(10.46)
(10.47)
(10.48)
350
где хб„(1) =
о
о
о
о
В Убкт
Ду(1)
о ^
о
а
~ <°„<«
Ай
=
а
0
а
0
а
а
у,со
а
0
0
0
«у,р
0
0
0
Э,Р
0
ч»,<»у
0'
а
д
0
и„Э
0
а
Р,<о,
0
0
а
а
а
0
^0
р,у
0
'о
0
0
0
0
0
^р
0
0
а
0
0
^
а
<°ж,
',
0
0
РА
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
а
ш,,
а
р,р
а
0
м.
0
[Ч 0 0 1су О ЦЦ].
Получим матрицу передаточных функций по параметрам бокового
движения на внешние возмущения
в
6кт
'Р^
?
тлСАУг\-1»в
СА
где Ф^Уг(р)- переходная матрица состояния по параметрам бокового движения при
включенной САУг.
Таким образом, реакция самолета, управляемого САУг, на внешние
возмущения полностью определяется видом переходной матрицы Фв^Уг (р).
Методика получения этой матрицы аналогична методике получения соответствующих матриц для автопилотов угла крена и курса.
10.3. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ
СКОРОСТЬЮ ПОЛЕТА НА МАРШРУТЕ
До последнего времени управление скоростью полета в основном
осуществлялось через контур ручного управления, так как сравнительно
медленный характер изменения скорости не вызывает затруднений у пилота. Кроме того, дозвуковые пассажирские самолеты обладают большим
запасом устойчивости по скорости. Однако повышение требований к
351
экономичности полета и точности выдерживания скорости на наиболее
напряженных этапах полета привели к необходимости автоматической
стабилизации и управления скоростью полета.
Для самолетов ГА различают следующие основные режимы полета:
максимальной крейсерской скорости, максимальной дальности, экономический крейсерский режим. Выполнение этих режимов связано с управлением скоростью полета самолета.
Режим максимальной крейсерской скорости, определяемый с учетом
ограничений по скоростям нормальной эксплуатации, применяется, когда
отсутствуют ограничения по расходу топлива, а максимальная коммерческая нагрузка не ограничена взлетной массой или массой заправляемого
топлива. Тогда крейсерские скорости близки к максимальным при нормальной эксплуатации.
Режим максимальной дальности используется в тех случаях, когда
максимальная коммерческая нагрузка ограничена взлетной массой или
заправляемым топливом, а также при полете на неоптимальных эшелонах.
Этому режиму соответствуют числа М, при которых километровый расход
топлива едва превышает (на 1%) минимальный. Тогда обеспечивается
максимальная коммерческая нагрузка, а также достаточная устойчивость
по скорости. Наивыгоднейшие числа М этого режима зависят от полетной
массы и высоты эшелона. Экономический режим применяется, когда нет
ограничений по максимальной коммерческой нагрузке. Этому режиму
также соответствуют определенные оптимальные числа М. К факторам,
влияющим на режимы крейсерского полета, относятся высота эшелона,
температура наружного воздуха, направление и скорость ветра.
Благоприятное влияние автоматики на процесс управления полетом
проявляется в улучшении качества переходных процессов возвращения
самолета к требуемой скорости или требуемому числу М после непроизвольного отклонения под действием внешних возмущений. Так осуществляется автоматическая стабилизация скорости и числа М при наборе
высоты, крейсерском полете и снижении.
Существуют два основных способа -управления скоростью и числом М:
воздействием на руль высоты и на тягу двигателей. В первом случае
тангенциальное ускорение создается вследствие изменения аэродинамической силы лобового сопротивления, а во втором случае-изменением тяги.
Первый способ применяется обычно на маршруте. При этом путем
изменения тяги двигателей обеспечивается требуемый режим изменения
высоты: если тяга больше необходимой для горизонтального полета,набор высоты, меньше-снижение.
10.3.1. Системы автоматического управления скоростью
и числом М полета на маршруте
Принцип действия. Самолет как объект управления, как правило, обладает статической устойчивостью в продольном траекторном движении по
скорости при действии внешних возмущений. Однако возвращение само352
Рис. 10.24. Функциональная схема системы автоматического
управления
скоростью
дуй .
и&
гко
1
кг
ма
КАП
Ол//гГ
К
'
"'» гпч \^-
и
ы^_
ОГЛ11
лета к исходному режиму по скорости может сопровождаться значительными статическими ошибками и существенной колебательностью.
Кроме того, условиями эксплуатации самолета скорость ограничивается по
максимуму и минимуму. Поэтому при полете на режимах, близких к граничным, скорость должна строго контролироваться. При ручном пилотировании задачи стабилизации и контроля за скоростью решает пилот. Он
наблюдает за изменением скорости по указателю и, воздействуя на колонку
штурвала, отклоняет руль высоты таким образом, чтобы самолет удерживал требуемую скорость или изменял ее соответствующим образом.
Системы автоматического управления скоростью служат для освобождения
пилота от решения этой задачи.
Система,автоматического управления скоростью (САУу) обеспечивает
стабилизацию и управление продольным движением самолета на начальном этапе набора высоты и заключительном этапе снижения путем отклонения руля высоты при возникновении рассогласования между значениями
текущей и заданной скорости.
Принцип действия, устройство и работа САУУ во многом аналогичны
принципу действия, устройству и работе САУН. В состав САУУ (рис. 10.24)
входят датчик угловой скорости тангажа ДУС, датчик угла тангажагировертикаль ГВ, датчик рассогласования между значениями текущей
и опорной скорости - корректор скорости КС, вычислитель ВСАУу и
сервопривод руля высоты С775В.
Простейшая САУУ реализует следующий закон управления рулем высоты:
(10.49)
„ До + к у (У 0 - V),
у
где й в
-автоматическое отклонение руля высоты от балансировочного положения; До - приращение опорного угла тангажа Аи = о — о 0 ; V, У„-соответственно
текущее и опорное (в момент включения режима) значения скорости; ку-передаточный коэффициент по скорости, определяющий угол отклонения руля высоты при
возникновении рассогласования между значениями текущей и опорной скорости
в 1 км/ч.
Другими словами, отклонение руля высоты прямо пропорционально
угловой скорости тангажа, приращению опорного угла тангажа и приращению скорости. Закон управления (10.49) можно также представить как
закон управления автопилота угла тангажа, обеспечивающий формирование заданного угла тангажа пропорционально приращению скорости:
(10.50)
123ак. 948
353
где к*-передаточный коэффициент по скорости к углу тангажа.
САУ у работает в двух режимах: согласования и стабилизации скорости.
В режиме согласования в корректоре скорости происходит непрерывное
обнуление сигнала текущей скорости с помощью электромеханической
следящей системы. Это происходит, когда система работает в автопилотном режиме стабилизации угла тангажа. Таким образом обеспечиваются запоминание текущей скорости и подготовка к безударному включению
САУ У для стабилизации скорости.
Включение режима стабилизации скорости приводит к отключению
следящей системы корректора. Тогда на его выходе формируется сигнал
разности иДу между опорным значением скорости, которую имел самолет
в момент включения режима стабилизации, и значением текущей скорости.
Если под действием внешних возмущений скорость полета меняется на
величину ДУ = V — У 0 , то сигнал иДу с КС поступает на вычислитель
ВСАУ у , где формируется сигнал, пропорциональный приращению заданного значения угла тангажа и д „^. Сервопривод отрабатывает этот сигнал
<>САУу
в перемещение руля высоты о в у .
Отклонение вала рулевой машины приводит к появлению сигнала
обратной связи и ж о с , который постепенно уравновешивает сигнал приращения заданного угла тангажа ид Ц)и . Когда угол отклонения рулявысоты станет пропорциональным рассогласованию А У , руль остановится.
Отклонение руля высоты вызовет появление управляющего аэродинамического момента тангажа М г8 , противоположного по знаку возмущению,
вызвавшему рассогласование ВДУ. Под действием этого момента самолет
начинает изменять угол тангажа. С гировертикали подается сигнал и и ,
пропорциональный изменению угла тангажа. Этот сигнал преобразуется
в механизме согласования в сигнал ид„, под действием которого сервопривод начинает отрабатывать руль высоты в обратную сторону. Когда
сигнал приращения текущего угла тангажа и ц сравняется с сигналом
приращения заданного угла тангажа и д „ 1д , руль высоты вернется в исходное балансировочное положение.
Изменение угла тангажа вызовет изменение силы лобового сопротивления А Х а , что в свою очередь приведет к изменению скорости самолета
таким образом, что она начнет приближаться к опорному значению. Тогда
сигнал ид у будет уменьшаться, а вместе с ним и сигнал ид„ . Равновесие
сигналов ид„ и идц^ вновь нарушится и их разность поменяет знак.
Сервопривод будет отрабатывать руль высоты в противоположную от
балансировочного положения сторону. Руль высоты остановится, когда
сигнал обратной связи уравновесит разность сигналов (иди — ид„1ад).
Управляющий аэродинамический момент тангажа М г6 поменяет знак
и самолет начнет уменьшать угол тангажа. Сигналы и Д у , ид„юд и иД()
постепенно установятся равными нулю. Тогда под действием сигнала
обратной связи и жос сервопривод вернет руль высоты в балансировочное
положение. При этом текущая скорость самолета будет равна опорной
354
скорости. Режим управления скоростью от задатчика в САУ У не используется.
Оптимальное управление самолетом связано с минимизацией удельного
километрового расхода топлива, который зависит от условий полета.
С изменением температуры воздуха меняется удельный расход топлива
и число М вследствие изменения скорости звука, хотя скорость может
выдерживаться постоянной. Известно, что удельный расход и скорость
звука меняются пропорционально л/Т. Поэтому оказывается целесообразным задавать удельный расход топлива в функции числа М и выдерживать в полете заданное число М, а не воздушную скорость. Тогда
удельный расход топлива и режим работы двигателей остаются неизменными при изменении температуры. Воздушная скорость при этом является переменной. Для автоматизации решения этой задачи предусмотрен
соответствующий режим работы САУ.
Система автоматического управления числом М полета (САУМ)
обеспечивает стабилизацию и управление продольным движением самолета на заключительном этапе набора высоты, крейсерском полете по
маршруту и начальном этапе снижения путем отклонения руля высоты при
возникновении рассогласования между значениями текущего и заданного
числа М полета.
Простейшая САУ М реализует следующий закон управления рулем
высоты:
5™ум = ^.ш, + к„Ди + к м (М 0 - М),
(10.51)
где 5 САУМ-автоматическое отклонение руля высоты от балансировочного положения
с помощью САУ М ; М, М0-соответственно текущее и опорное значения числа
М полета; км-передаточный коэффициент по числу М.
Принцип действия, устройство и работа САУМ аналогичны САУУ.
Отличие заключается в том, что в качестве датчика рассогласования
между значениями текущего и опорного числа М используется корректор КМ.
Управление движением. Следует помнить, что действующие на самолет
силы и моменты зависят от воздушной скорости полета. Различают
истинную воздушную скорость V, индикаторную скорость У нн и приборную Упр. Истинная воздушная скорость-это скорость перемещения
самолета относительно воздушных масс. Индикаторная скорость связана
с истинной воздушной скоростью через относительную плотность воздуха:
Уин = УЛ/РН/РО- Приборная скорость отличается от индикаторной на
значение аэродинамических и инструментальных поправок, а также поправок на сжимаемость воздуха.
Знание истинной воздушной скорости необходимо для определения
путевой скорости У п и решения задач навигации. Ограничения на режимы
полета накладываются по индикаторной скорости. Автоматическое управление самолетом осуществляется по приборной скорости.
Качество работы САУ У и ее влияние на процесс управления продольным движением оценивают по качеству переходных процессов управления
скоростью. Рассмотрим процесс устранения начального отклонения скорос355
ти ДУ = У0 — V с помощью САУУ, представленный на рис. 10.25. Появление рассогласования по скорости ЛУ в момент времени 11 начинает
парироваться САУ У отклонением руля высоты на угол А8 в 1 . Изменение
угла атаки вызывает появления статического момента Мга, который в мог
мент времени 12 уравновесит управляющий момент М25>. Поэтому суммарный момент тангажа Мг меняет знак и угол тангажа перестает расти. Тогда
САУу в момент времени 13 возвращает руль высоты к исходному балансировочному положению.
Управляющий момент тангажа М г5 вызовет отклонение вектора результирующей аэродинамической силы К А . Ее проекция на ось
ОХа-сила лобового сопротивления изменится, а вслед за этим изменится
величина тангенциальной перегрузки Ап х .' Это приведет к изменению
воздушной скорости самолета и уменьшению рассогласования АУ. Поэтому в момент времени 14 САУУ отклоняет руль высоты в противоположную
сторону на угол А8в4. Приращение угла тангажа и тангенциальной перегрузки уменьшается и к моменту времени 15 САУУ устанавливает руль
высоты в балансировочное положение А5В. Самолет выходит на опорную
скорость У0, а вектор скорости принимает исходное положение.
Как видно из графиков, процесс устранения начального отклонения У0
имеет плавный апериодический характер, что обеспечивается наличием
в законе управления сигнала, пропорционального углу тангажа. Отсутствие
этого сигнала привело бы к тому, что при подходе к опорной скорости ее
вектор не принял бы исходного
положения. Самолет проскочил бы
значение опорной скорости и процесс стабилизации стал бы колебательным и, может быть, неустойчивым. Таким образом, сигнал угла тангажа в законе управления
САУ У служит для демпфирования
длиннопериодических колебаний
самолета по скорости.
Особенности законов управления. Для дополнительного улучшения демпфирования этих колебаний в закон управления САУУ
включается сигнал, пропорциональный воздушному ускорениюпроизводной воздушной скорости:
Аи з а д = к у А У + к у Д У ,
Рис. 10.25. Процесс устранения начального отклонения скорости с помощью системы автоматического управления
356
(10.52)
где 1су-передаточный коэффициент по
производной воздушной скорости, определяющий, на сколько градусов должен измениться угол тангажа самолета
при изменении скорости на 1 км/ч/с.
Рис. 10.26. Структурная схема системы автоматического управления скоростью
с ПИД-управлением
Процесс устранения САУ У внешних моментных возмущений аналогичен
рассмотренному в параграфе 10.1 процессу с участием САУН. Для устранения статических ошибок в закон управления САУ У вводится сигнал,
пропорциональный интегралу отклонения скорости по времени (рис. 10.26):
Ао зад = к у АУ + к у АУ +
Р
(10.53)
АУ,
где кгду-передаточный коэффициент по интегралу изменения скорости.
10.3.2. Моделирование управления скоростью полета
на маршруте
Реакция самолета на управляющие воздействия системы автоматического
управления скоростью. Рассмотрим модель продольного движения самолета по первичным параметрам (3.3). Тогда модель замкнутой системы
«самолет-САУУ» будет содержать уравнения состояния, выхода и входа,
а также закон управления САУ У :
х п1 (1) = А П1 хп1 (1) + В *! и*! (I),
(10.54)
уп1(1) = хп1(1),
и>;1(1) = 6^АУУ(1),
(10.55)
(10.56)
6^(1) = ВП1 Уп1 (1)"+ Е^АУзад(1),
(Ю.57)
Асо2(1)
где хп1(1) =
Да(1)
О
,
А П1 =
^а,а
'«,«.
О
"
а
<в„у
Л
а,У
0
0
0
ау а ау „ ау у _
357
0 к
о
о
о
Е САУу
п!
_
_
Получим вектор передаточных функций замкнутой системы «самолет-САУу» по первичным параметрам продольного движения на управляющее воздействие по скорости
Переходная матрица состояния по первичным параметрам продольного
движения самолета при включенной САУУ
Ф^Уу(р) = (р! - АП1 - В^В^у)-1 = (Ф^у)-1 .
Определим матрицу ФП^УУ(Р) следующим образом:
где {Ф^Уу(р)}пр- присоединенная матрица.
Определитель матрицы
р - аЧ,<°,'
~а»1,а
'
*
— а,а,А Ч
-аш„8Л»
'
*
1
-а
а
,
Р- а а,а
0
-а а > у
0
р
0
—а
—а
р—а
а
г
—р
-И1*
"3
у
У=
~
=
а
а
у
а у у а н а + аа 0
~а
358
V
-^З.КиКи
)0 г
- и,о,
0
~ а ш 1 ,«-
'
аа
Шг
А1
V_
4а
о,о>. а ш„5
а
а
~ У,о а,У
а
а
~~ а,а У,У
а
а
а
а,а У,У о)г,5. ^гаг +
у
а
О
У=
а
а
У,а а,<о г » 1 ,5, ^ и ^1>
~ а а,а а и,со, а<ог,
~ а а,У а У,а а и,ю г а о) 1 ,а + а а,У а У,а а и,т, а о) г ,8
Так как вектор входа по управляющим воздействиям В^ содержит
только один ненулевой элемент а ш < 6в, определим в присоединенной
матрице {Фп^Уу(р)}пр только первый столбец:
Р [(Р - а а,а) (Р ~ а У, V) ~ а У.а а а,У!
а
а, Ю г Р(Р ~ а У,у) + а а . У а ц , щ . а У , ц
[(Р ~ а а ,а)(Р ~ а У,у) ~ а У , а а а , у ]
ДСАУу(р)
[(р — ад.^ац^ау^ + а а - ( 0 1 ау | а р]
А С А У У( Р )
Передаточные функции определим следующим образом:
САУ У
,
_САУУУ
, " Р 2 4-В, Ц
ДУ,
2
(10.58)
„
В 2в
,ДУ,.
4 + А С А У у р З + А С А У у р 2 + дСАУу р + дСАУу
(10.59)
р
САУ„У
\У/
САУ У
"
(10.60)
359
САУ У
ут
г, САУу
где В2„
В
САУу
1и
ду 1
!+
= аШг 8 _:ь
в
1- А^ ур НК
V
1 а а,о а У,У ~ аУ,ааа,У'аш„8,1сиК1) >
,
, V
лу
°2ч
~ ~аа,шгага,,8,кики >
Д САУ У _ _
,
А^АУУ
V
С вГ'-К
САУу _
САУу _
дСАУур2_
1с 1сУ
, V
„САУу _
Условия устойчивости замкнутой системь! «самолет-САУу» по критерию Гурвица следующие:
--:> ",
/\3
А2
^ и»
А^
* ^ У, А0
* ^> V,
ДСАУУ ДСАУУ _ ДСАУ>
У0 ^
(
Ш
62)
дСАУу ДСАУУ дСАУу _ (ДСАУу)2 _(дСАУу)2 дСАУ>
()
у
Правильным выбором передаточных коэффициентов кШг, к„ и к у
добиваются выполнения условий (11.14), а также обеспечивают требуемые
запасы устойчивости.
Рассмотрим реакцию замкнутой системы «самолет-САУу» на ступенчатое отклонение пилотом задатчика скорости. После окончания переходных процессов произойдет формирование нового установившегося значения скорости:
АУ у с т = 11т {рАУзад(Р)УУду"'(Р)} =
р-»0
_
Р4 + А§АУУ р3
Р
АН,Я„ —
=
дСАУ у "^^зад
0
у
1_ааааУ1>а11шай>8>
-
» ~
*
АНзад
.
а
.а^.ш^ш^б.^и + а,а Зу.Л.оо^со^у] АУ з а д
Следовательно, закон управления (10.49) не обеспечивает астатизма по
управляющему воздействию. Для ликвидации статической ошибки необходимо использовать в законе управления интеграл от рассогласования
(АУМД - АУ).
360
Глава 1 1
УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ
ПРИ ЗАХОДЕ НА ПОСАДКУ
В зависимости от степени автоматизации можно выделить следующие
основные режимы управления траекторным движением самолета при
заходе на посадку: ручное (штурвальное) и автоматическое управление.
При ручном управлении используют автоматические средства улучшения устойчивости и управляемости. Пилот по наземным ориентирам
выводит самолет на требуемую траекторию для завершения захода на
посадку.
При автоматическом управлении автоматика формирует управляющие
сигналы на рулевые поверхности. Пилот при этом исключается из контура
управления и осуществляет функции более высокого иерархического
уровня. Он задает программу траектории захода самолета на посадку,
контролирует выполнение автоматикой этой программы, осуществляет
визуальную привязку к наземным ориентирам (если позволяют метеорологические условия), принимает оперативные решения по отключению режима автоматического управления с переходом на более низкий уровень
автоматизации.
Между этими крайними по степени автоматизации режимами можно
выделить промежуточные полуавтоматические режимы управления траекторным движением самолета: директорное, совмещенное и комбинированное.
При директорном управлении автоматизирована обработка информации, ее комплексирование и формирование директорного сигнала на
командные (директорные) приборы в виде отклонений командных индексов
или стрелок.
Непосредственное управление пилот осуществляет в режиме ручного управления, стремясь воздействием на органы управления совместить командные стрелки с центром прибора, выдерживая тем самым
заданную автоматикой траекторию полета. Автоматические средства
при этом решают задачи улучшения устойчивости и управляемости
самолета.
При совмещенном управлении осуществляется чередование режимов
директорного управления с ручным воздействием на рулевые поверхности
и автоматического управления на отдельных участках траектории полета
самолета, когда пилот прекращает воздействие на органы управления.
Начало одного режима совмещено, согласовано с концом предыдущего
режима.
При совмещенном комбинированном управлении возможно одновременное управление пилотом и автоматикой в соответствии с определенной
логикой взаимодействия директорного и автоматического управления.
361
11.1. ДИРЕКТОРНОЕ И АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ БОКОВЫМ
ТРАЕКТОРНЫМ ДВИЖЕНИЕМ
11.1.1. Системы директорного и автоматического
управления боковым траекторным движением
Общие сведения. Одним из основных критериев классификации систем
директорного и автоматического управления посадкой самолета является
их способность осуществлять посадку в условиях различных метеорологических и посадочных минимумов.
Метеоминимум посадки (минимум погоды для посадки)-это минимально допустимее значения высоты нижней границы облаков и наклонной дальности видимости, при которых обеспечивается возможность
безопасной посадки. Высота нижней границы облаков и наклонная дальность видимости являются метеорологическими параметрами. Величины
этих параметров характеризуют сложность погодных условий, в которых
осуществляются заход на посадку и посадка самолета.
В соответствии с понятием метеоминимума можно выделить два этапа
захода на посадку. Первый происходит в условиях отсутствия видимости
земли и наземных ориентиров. Этот этап предусматривает директорное (по
приборам) или автоматическое управление полетом самолета. Второй этап
проходит в условиях наличия видимости земли и возможности визуальной
привязки к наземным ориентирам. Этот этап осуществляется в режимах
автоматического, директорного или ручного управления.
Переход с первого этапа посадки на второй и определяет точку
метеоминимума посадки. Однако высоту нижней границы облаков часто
определить очень трудно, иногда четкой границы не существует. Поэтому
в качестве параметра, характеризующего предельную высоту для посадки,
используется высота принятия решения (ВПР), установленная относительная высота, на которой должен быть начат маневр ухода на второй круг
в случаях, если до достижения этой высоты не установлен надежный
визуальный контакт с ориентирами для продолжения захода на посадку
или если положение самолета в пространстве относительно заданной
траектории полета в этот момент не обеспечивает безопасность посадки.
Использование высрты принятия решения в качестве количественного
параметра не исключает необходимости сообщения экипажу высоты
нижней границы облаков, что позволяет сформировать представление об
обстановке при заходе на посадку и условиях перехода на визуальный
полет.
Аналогичным образом обстоит дело со вторым параметром минимума
для посадки - наклонной дальностью видимости. Чтобы определить положение и параметры движения самолета относительно ВПП, пилот должен
видеть определенное число ориентиров по курсу посадки. При посадке
в сложных метеоусловиях такими ориентирами являются огни светооборудования аэродрома (огни подхода, огни ВПП и т.д.). Для пилота
в этот момент необходимо знать дальность видимости наземных ориентиров как наклонной дальности из кабины снижающегося по глиссаде
362
самолета. Однако надежных методов измерения такой дальности не
существует.
Поэтому под дальностью видимости понимается максимальное расстояние в направлении посадки, на котором ВПП или установленные огни,
ограничивающие контуры ВПП, можно видеть из положения под установленной точкой осевой линии ВПП с высоты, соответствующей среднему
уровню глаз пилота в момент приземления (около 5 м). Очевидно, что
дальность видимости на ВПП не совпадает с наклонной дальностью
видимости при ВПР Нреш > 0. Однако в условиях посадки, когда Нпр ^ О,
дальность видимости на ВПП является единственным параметром, определяющим метеоминимум посадки.
Международной организацией ИКАО введены категории посадочных
минимумов (категории посадки), каждая из которых характеризуется
высотой принятия решения и дальностью видимости на ВПП. Классификация категорий приведена в табл. 11.1.
Первая категория соответствует высоте принятия решения Нпр ^ 60 м
в условиях видимости ВВпп ^ 800 м. Вторая категория соответствует
высоте принятия решения 30 м < Нпр < 60 м в условиях видимости 400 м <
< ОБПП < 800 м. Категория Ша соответственно предполагает 0 < Нпр <
< 30 м и наличием видимости на ВПП 400 м < ВВпп < 200 м. Категория
1ПЬ соответственно предполагает Нпр = 0 и 200 м ^ ОВпп < 50 м. Для
категории Шс Нпр = 0 и 50 м < ВВпп 0 м.
Посадочный минимум определяется многими факторами: точностными
характеристиками пилотажно-навигационного комплекса, аэродинамическими качествами и маневренными характеристиками самолета, степенью
оборудованности аэродрома посадочными средствами, квалификацией
экипажа и т.д. Поэтому самолету и аэродрому присваивается одна из
перечисленных категорий посадочных минимумов. Снижение посадочных
минимумов позволяет повысить регулярность полетов, но усложняет
задачу пилотирования при заходе на посадку и при посадке. На этих этапах
полета значительно изменяются режим полета, конфигурация самолета,
режимы работы двигателей.
Для захода на посадку и посадки используют радиотехнические системы
(РТС) инструментальной посадки: отечественную СП и международную
1Ь8. Задачей этих систем является формирование траекторий посадки, по
которым должен снижаться самолет для вывода его в точку приземления на
ВПП. Эта траектория задается пересечением двух плоскостей: плоскости
Таблица 11.1
Параметр
I
II
III
а
Высота принятия решения
Дальность видимости на ВПП
Ь
с
60
30
0
0
0
800
400
200
50
0
363
курса и плоскости планирования. При заходе на посадку бортовая РТС
измеряет угловое отклонение самолета от заданной траектории в горизонтальной и вертикальной плоскостях и выдает эту информацию на
директорные приборы СТУ и в САУ. РТС инструментальной посадки
состоит из комплексов наземного и бортового оборудования.
В состав наземного комплекса входят: курсовой радиомаяк (КРМ),
глиссадный радиомаяк (ГРМ), дальняя и ближняя приводные радиостанции
(ДПРС и БПРС), дальний и ближний маркерные радиомаяки (ДМРМ
и БМРМ).
В состав бортового комплекса входят: курсовой, глиссадный и маркерный радиоприемники {КРП, ГРП и МРП) (система «Курс-МП») и работающие с ними совместно автоматический радиокомпас (АРК), радиовысотомер малых высот (РВ).
Радиотехнические инструментальные системы посадки метрового диапазона имеют ряд существенных недостатков. В частности, линия курса
и глиссады подвержена сильному влиянию подстилающей поверхности,
окружающих местных предметов. Кроме того, с их помощью нельзя
обеспечить оптимальные траектории посадки для различных типов самолетов. Поэтому в последнее время интенсивно разрабатываются микроволновые системы посадки МЬ8.
Информация об угловом и траекторном положении и движении самолета поступает пилоту через соответствующие указатели информационноизмерительных систем пилотажно-навигационного комплекса (ПНК). При
ручном управлении самолетом пилот включен в многоконтурную систему
с перекрестными связями, которые образуются в результате взаимодействия аэродинамических, инерционных и гравитационных сил и моментов.
Пилот создает представление о процессе пилотирования по информационной модели, дающей совокупность текущей информации о состоянии
объекта управления, положении органов управления и их воздействии на
управляемый процесс, воздействиях внешней среды на объект управления.
Сравнивая информационную модель с желаемым образом полета, пилот
добивается их совпадения путем воздействия на органы управления. Таким
образом, в процессе ручного управления самолетом между информацией,
получаемой пилотом, и его ответными действиями существует закономерная связь, которая может быть охарактеризована временем реакции пилота
и точностью его действий.
В настоящее время существует большое число моделей, с помощью
которых можно описать деятельность пилота в режиме ручного управления
самолетом. Воспользуемся линейной динамической моделью с передаточной функцией пилота в виде
Модель пилота описывается последовательным соединением пяти
элементарных звеньев. Первое звено характеризует коэффициент передачи
пилота как субъекта управления к п , зависящий от градиента усиления
364
нагрузки на отклонение органа управления. Второе звено характеризует
запаздывание реакции пилота т на принимаемую приборную, визуальную
или слуховую информацию. Третье звено определяет инерционность
нервной системы пилота Т 15 обусловленную необходимостью выработки
решения в результате обобщения полученной информации. Четвертое звено
отражает инерционность двигательной (мышечной) системы пилота Т 2 .
Пятое звено учитывает свойство пилота, заключающееся в стремлении
скомпенсировать свою инерционность созданием форсирующих, упреждающих сигналов с постоянной времени Т 3 .
Как показывают исследования, постоянные времени запаздывания т и
инерционность двигательной системы пилота Т2 составляют десятые доли
секунды. Для уменьшения времени стараются всю необходимую пилоту
информацию о процессе управления при заходе на посадку вывести на
минимальное количество приборов (пилотажно-командный, навигационноплановый, указатель скорости и вариометр).
Постоянная времени 1\, связанная с инерционностью процессов принятия решений, может достигать нескольких секунд. В режиме ручного
управления соотношение между временем, необходимым для выполнения
пилотом операций по управлению самолетом, и располагаемым временем,
рассчитанным из условий выполнения заданной траектории полета с
требуемой точностью, определяет функциональное состояние пилота.
В случае близости этих времен наступает дефицит времени для оценки
ситуации и выработки решения, который развивает у пилота состояние
напряженности, способное перерасти в психологический срыв и привести
к появлению ошибок пилота.
Одним из основных путей упрощения деятельности пилота по управлению траекторией движения самолета при заходе на посадку является
автоматическая выдача пилоту командных сигналов на директорный
прибор.
Система директорного управления заходом на посадку включает систему ручного (штурвального) управления, охваченную дополнительным
контуром, формирующим на пилотажно-командном приборе командные
сигналы. На пилота возлагается задача обнуления этих командных
сигналов.
Система директорного управления автоматизирует сбор потребной
информации от датчиков исходной информации, процесс логических
вычислительных операций над этой информацией, выдачу вторичной
информации в оптимально закодированном виде на командный прибор.
Отличие директорного управления от ручного заключается в том, что
процесс управления сводится к процессу стабилизации существенно более
простых координат управления путем использования вторичной информации, формируемой директорной системой. При формировании системы
траекторного управления как звена системы директорного управления
необходимо определить координату командного сигнала, способ выдачи
командного сигнала, закон управления вычислителя, а также масштаб
командного прибора.
365
Траекторию полета самолета в пространстве можно рассматривать
состоящей из двух составляющих: в горизонтальной и вертикальной
плоскостях. На директорный прибор целесообразно выводить два командных сигнала: координату управления боковым движением 2б(Ж и продольным движением самолета Ьпрод .
Координату управления выбирают из условия максимальной разгрузки
пилота в процессе пилотирования самолета. При этом важным условием
является наличие в передаточной функции самолета по выбранной координате интегрирующего звена. Как показали исследования, наиболее удобными координатами при управлении боковым траекторным движением
является угол крена самолета, а при управлении продольным траекторным
движением - угол тангажа или интеграл нормальной перегрузки. Такой
выбор координат управления позволяет обеспечить минимальную загрузку
пилота, реализацию закона управления вычислителя с большой степенью
унификации для директорного и автоматического режимов, плавное
переключение с директорного режима на автоматический и наоборот.
Существуют два способа выдачи пилоту командного сигнала. Первый
способ предполагает использование командных индексов, на которые
подаются сигналы, пропорциональные углам крена и тангажа. В этом
случае задача пилота заключается в совмещении путем отклонения элеронов и рулей высоты указателей текущих углов крена и тангажа с индексами.
Отклонение указателя текущего угла крена от индекса заданного угла крена
указывает на необходимость изменения текущего угла крена таким образом, чтобы указатель текущего угла крена находился напротив индекса
заданного угла крена.
Второй способ, получивший большее распространение, предполагает
использование командных стрелок, на которые подаются сигналы, пропорциональные разности заданного и текущего углов крена (вертикальная
стрелка) и разности заданного и текущего углов тангажа (горизонтальная
стрелка). В этом случае задача пилота заключается в удерживании путем
отклонения элеронов и рулей высоты командных стрелок в среднем
положении. Отклонение командной стрелки от среднего положения указывает на необходимость изменения углов крена или тангажа, чтобы стрелка
вернулась в среднее положение.
Таким образом, в режиме директорного управления пилот осуществляет
операцию интегрирования сигнала положения стрелки и реализует при
этом передаточную функцию
\Уп(р) = к „ е ^ ± ^ .
(11.2)
В контуре директорного управления пилот выполняет роль исполнительного устройства, отслеживающего командный сигнал. В процессе
управления, адаптируясь к изменяемым условиям полета, пилот может
вносить полезные упреждающие воздействия, повышающие точность
управления.
366
В директорией системе управления динамика процессов определяется
в основном законом управления вычислителя и в меньшей степени зависит
от квалификации пилота. Таким образом, характер деятельности пилота
при директорном управлении принципиально отличается от характера
деятельности при ручном управлении. Основное отличие заключается
в том, что в ручном режиме управления пилот сам формирует команды
управления, а в директорном он выполняет команды, формируемые
вычислителями СТУ.
В целом система директорного управления обеспечивает высокую точность пилотирования на участках полета малой длительности, однако из-за
большой концентрации внимания на директорном приборе ослабляется
контроль за приборным оборудованием и окружающей обстановкой, что
увеличивает время обнаружения отказа и уменьшает вероятность своевременного определения нарушения режима полета.
Принцип действия. Управление боковым траекторным движением самолета при заходе на посадку производится пилотом визуально по наземным
ориентирам и по приборам. Наблюдая за изменением курса самолета по
указателю курса командного прибора, пилот воздействует на баранку
штурвала и отклоняет элероны таким образом, чтобы совершить последний разворот в сторону ВПП и затем удерживать самолет по курсу ВПП.
Системы директорного и автоматического управления в боковом канале
служат для облегчения пилоту решения этой задачи.
Система директорного управления угловым отклонением от равносигнальной линии курса (СДУЕ ) обеспечивает стабилизацию и управление
боковым траекторным движением самолета при заходе на посадку путем
выдачи пилоту сигнала в виде отклонения командной стрелки прибора при
возникновении углового отклонения самолета от равносигнальной линии
курса ВПП.
Простейшая СДУек реализует следующий закон управления командной
стрелкой:
СЛУ
* = 14 (У - Узад) .
СТ
ш
р
р
Узад = ^у " А Уэк + V 8к + V ёк >
(11.3)
СДУ
где ст2 -отклонение боковой командной стрелки прибора по сигналу СДУ;
к а -передаточный коэффициент по отклонению боковой командной стрелки, определяющий, на сколько миллиметров должна сместиться стрелка при отклонении
текущего угла крена от заданного на 1°; у, у з а д - текущее и заданное значения угла
крена; к^" - передаточный коэффициент по углу крена на изменение курса, определяющий, какой угол крена должен принять самолет при возникновении рассогласования по курсу в 1°; Ду,,,- рассогласование между курсом ВПП и текущим курсом
самолета; Ц,", к '-передаточные коэффициенты по углу крена соответственно на
угловое отклонение самолета от равносигнальной линии курса и на скорость этого
отклонения; ек, ё,- соответственно угловое отклонение и скорость углового отклонения самолета от равносигнальной линии курса.
Рассмотрим функциональную схему аналоговой СДУЕ (рис. 11.1).
В состав системы входят датчик текущего угла крена -гировертикаль ГВ,
датчик текущего курса -курсовая система КС, задатчик курса ЗК, датчик
367
Рис. 11.1. Функциональная схема
системы директорного управления
угловым отклонением от равносигнальной линии курса
отклонения самолета от равносигнальной линии курса-курсовой радиоприемник КРП, формирователь рассогласования между курсом ВПП и
текущим курсом самолета-пилотажно-навигационный прибор ПНП,
формирователь командного сигнала-вычислитель системы траекторного
управления ВСТУ, указатель командного сигнала-пилотажно-командный
прибор ПКП.
Работу системы поясним с помощью процесса выхода самолета на ось
ВПП (рис. 11.2).
В точке /, когда самолет летит с курсом \|/Е, определяемым курсовой
системой КС, пилот выставляет рукояткой задатчика курса на приборе
ПНП курс ВПП \)/впп- Прибор ПНП вырабатывает сигнал и Ду _, пропорциональный разности А\|/зк = Ч/впп — V» • - Этот сигнал поступает в
вычислитель СТУ, но до тех пор, пока самолет не войдет в зону уверенного
приема сигналов КРМ (точка 2), цепь управляющего сигнала с вычислителя
будет разомкнута. В момент захвата зоны КРМ на входе вычислителя
появляется сигнал с КРП 1е , пропорциональный угловому отклонению
самолета от равносигнальной линии курса ЕК . На основе этого сигнала
вычислитель СТУ формирует сигнал ие . Командный сигнал с вычислителя
СТУ начинает поступать на ПКП.
Необходимость введения сигнала иДУи в начале разворота к ВПП
обусловлена следующей причиной. Если бы в законе управления командной
стрелкой присутствовал бы лишь сигнал 1Е , пропорциональный е к ,
который в точке 2 имеет положительную полярность, то это привело бы
к выдаче командного сигнала ист такого знака, что пилоту пришлось бы
закладывать крен от ВПП. При выполнении такой команды самолет
развернулся бы в противоположную от ВПП сторону (штриховая линия на
рис. 11.2). При использовании сигнала иД1|/ в начале разворота, превышающего сигнал ие и противоположного ему по знаку, командный сигнал и0
будет иметь нужную полярность, что приведет к отклонению командной
стрелки ПКП пропорционально разности (иДж — и е ) вправо, выдавая
команду пилоту накренить самолет тоже вправо.
Пилот, воздействуя на штурвал, вводит самолет в крен, в результате
чего с гировертикали на вход вычислителя поступит сигнал и у . Когда этот
сигнал уравновесит разность (иДч, — и е ), то командный сигнал ист станет
равным нулю и командная стрелка вернется в нейтральное положение.
Пилот вернет штурвал в нейтральное положение. Самолет будет с заданным креном разворачиваться в сторону ВПП. По мере уменьшения
разности Д\|/зк сигнал иД)|/и тоже будет уменьшаться до тех пор, пока сигнал
ид>|/и не станет равным и е> , тогда под действием сигнала иу командный
368
сигнал поменяет знак и командная стрелка ПКП отклонится влево,
выдавая команду пилоту на выравнивание самолета по крену.
Пилот отклоняет штурвал влево и самолет выходит из крена. Сигнал
с гировертикали иу уменьшается и становится равным нулю. В точке
3 Оу = 0, иД1|/зк = ие> и самолет, управляемый пилотом, переходит в горизонтальный полет. Значение угла подхода \у подх , с которым самолет приближается к ВПП, выбирается в пределах 28-30°. В точке 4, когда самолет входит
в зону линейного изменения сигнала е к , сигнал иД1|/ отключается.
Однако если сигнал иа будет формироваться только на основе сигнала
иЕ1, т. е. будет осуществляться пропорциональное управление, это приведет
к колебательному характеру выхода самолета на ось ВПП. Действительно,
в точке 4 положительный сигнал ц^ вызовет отклонение командной стрелки
влево. Пилот заложит левый крен и по крутой траектории самолет
проскочит ось ВПП. Сигнал и8> поменяет знак, командная стрелка
отклонится вправо и пилот поменяет крен на противоположный. В результате самолет будет совершать колебания относительно оси ВПП.
Для устранения этого явления в вычислителе формируется сигнал,
пропорциональный скорости углового отклонения самолета от равносигнальной линии и4 . С приближением к оси ВПП знак ие противоположен
знаку и 6х , а при удалении совпадает с ним. Тогда в точке 4 сигнал иЕ> будет
превышать сигнал ие , а по знаку-противоположен и^. Это приведет
к тому, что командная стрелка отклонится вправо пропорционально
разности (иЕ1 — и^). Пилот введет самолет в правый крен. Сигнал %
скомпенсирует разность (иё — и е ) и командная стрелка вернется в
нейтральное положение. Пилот выведет самолет из крена. Постепенно
сигналы ие и иЕ станут равны нулю и самолет плавно впишется в ось ВПП.
При заходе на посадку с боковым ветром самолет отклоняется от оси
ВПП: За счет возникающих при этом сигналов иЕ и иЕ> на командную
стрелку выдается команда, выполняя которую, пилот разворачивает
КРМ
Рис. 11.2.
Процесс
самолета на ось ВПП
выхода
369
самолет в сторону оси ВПП. В результате возникает отклонение от
заданного курса ВПП Д\|/ зк . Когда это отклонение будет равно углу сноса,
самолет прекратит отклонение от оси ВПП и ие станет равным нулю.
Сигнал и6к будет скомпенсирован сигналом ид>|,^," так как они противоположны по знаку. В этом случае пилоту будет выдана команда на вывод
самолета из крена и самолет будет двигаться параллельно оси ВПП со
статической ошибкой, пропорциональной боковой составляющей скорости
ветра. Поэтому сигнал иДч/и целесообразно в пределах небольших углов
А\|/ЗК отключать.
Функцию демпфирования угловых колебаний самолета в режиме
директорного управления выполняет система улучшения устойчивости
и управляемости .через сервопривод, последовательно подключенный в
проводку управления элеронами.
Наиболее целесообразной координатой управления боковым движением
самолета является угол крена у. Это объясняется, во-первых, тем, что
в этом случае контур директорного управления содержит интегрирующее
звено, во-вторых, тем, что из условий безопасности полета самолета на
значение угла крена накладываются жесткие ограничения, которые необходимо соблюдать в условиях близости земли. Поэтому командный
сигнал, выдаваемый пилоту на директорный прибор, является функцией
сту
заданного значения угла крена узад .
Задача пилота заключается в удерживании путем воздействия на
штурвал командной стрелки бокового движения в среднем положении.
Отклонение командной стрелки от среднего положения указывает на
необходимость изменения крена таким образом, чтобы стрелка вернулась
в среднее положение.
Передаточный коэффициент кст выбирают из условий обеспечения
максимального удобства пилоту и ограничения заданных кренов. В случае
малого коэффициента усиления директорного прибора, т.е. при малых
перемещениях стрелки прибора на большой управляющий сигнал, пилоту
приходится для сведения к нулю рассогласования задавать баранкой
штурвала большие перемещения. Самолет в этом случае оценивается как
«тяжелый» в управлении. С другой стороны, при большом значении 1сст
небольшие усилия, прикладываемые пилотом к баранке штурвала, вызывают значительные отклонения командной стрелки директорного прибора.
Это также затрудняет управление самолетом и пилот воспринимает
самолет как «строгий» в управлении.
Максимальное отклонение командной стрелки на ПКП составляет
20-30 мм. Допустимые значения углов крена 20-30°. Поэтому обычно
выбирают ка> = (20 -н 30) мм/удоп = 0,5-1,5 мм/°.
Закон управления СДУе с учетом передаточных функций пилота \УП (р)
и системы штурвального управления ^сшу(р) имеет вид
(11.4)
Система автоматического управления угловым отклонением от равносигнальной линии курса (САУЕ ) обеспечивает стабилизацию и управление
370
Рис. 11.3. Функциональная схема системы автоматического управления угловым
отклонением от равносигнальной линии курса
боковым траекторным движением самолета при заходе на посадку путем
воздействия на элероны при возникновении углового отклонения самолета
от равносигнальной линии курса ВПП.
Простейшая САУ 8 реализует следующий закон управления элеронами:
КФ1
оСАУе
где 8Э
юх + ку (у - у зад ), узад = 14" Дх|/зк + Ц- ек + Ку' ё к ,
11 5
„ . ,,
-отклонение элеронов с помощью САУе к .
Функциональная схема аналоговой САУЕ (рис. 11.3) наряду с элементами СДУек включает датчик угловой скорости крена ДУС, вычислитель автопилота крена ВАПу и сервопривод элеронов С775Э. Работа САУ е
по формированию сигнала, пропорционального заданному углу крена^
аналогична работе СДУе . Отработка этого сигнала на элероны совершается, как в автопилоте угла крена.
Особенности законов управления. Как видно из законов управления
командной стрелкой СДУе (11.4) и элеронами САУЕ (11.5), необходимо
сформировать сигнал заданного крена. Эту задачу решает вычислитель
бокового канала СТУ. В простейшем случае сигнал у зад формируется
пропорционально угловому отклонению самолета от равносигнальной
линии курса.
Однако пропорциональное управление только по сигналу ек не обеспечивает демпфирование траекторных колебаний самолета относительно равносигнальной линии курса. Более того, по мере приближения к КРМ период
траекторных колебаний уменьшается и становится сопоставимым с периодом угловых колебаний по крену. Это приводит к тому, что эффективность
траекторного управления посредством создания крена существенно падает
и сам процесс вывода самолета на ось ВПП становится неустойчивым. Для
борьбы с этим явлением, очевидно, необходимо в закон формирования
сигнала заданного крена ввести информацию о скорости углового отклонения самолета от равносигнальной линии курса ё к .
Следует помнить, что при формировании сигнала заданного крена
пользуются информацией об угловом отклонении самолета от равно371
сигнальной линии курса, в то время как предпочтительным было бы
использование сигнала линейного отклонения
Текущее расстояние до КРМ ^крм может быть определено, если
известно расстояние до КРМ В0 в некоторый начальный момент времени
и скорость самолета V:
Это приводит к тому, что при различных расстояниях до КРМ и
одинаковых угловых отклонениях от равносигнальной линии курса линейные отклонения будут разными. Следовательно, передаточные коэффициенты 1се> и 1с4_, выбранные наилучшим образом для некоторой точки
траектории, могут оказаться неприемлемыми для других участков траектории. Для получения наилучших характеристик траекторного движения
самолета необходимо изменять передаточные коэффициенты 1сЕ и 1с4 по
мере приближения к КРМ. Для этого существует несколько способов.
Первый способ основывается на ослаблении сигнала, снимаемого
с КРМ по мере приближения к нему самолета функции дальности Вкрм(1),
т.е. ке = Г(Окрм) и 1с4 = Г(Вкрм). Однако на самолетах иногда отсутствует
информация о дальности до КРМ. Тогда принимают второй способ
коррекции передаточных коэффициентов, основывающийся на косвенном
использовании информации о дальности путем использования информации
о высоте полета.
Эту операцию можно выполнять непрерывно по сигналам с радиовысотомера или дискретно через определенные промежутки времени,
связанные с моментом «захвата» глиссады, прохождением маяков и т. д.
Естественно, непрерывная коррекция передаточных коэффициентов по
дальности или высоте позволяет обеспечить более точное выдерживание
заданной траектории полета. Однако решение такой задачи имеет определенные технические сложности.
При выборе передаточных коэффициентов ке1 и к4_ приходится также
учитывать влияние характеристик радиотехнической системы на динамику
траекторного движения. Вследствие разброса крутизны сигнала РТС 8>е
из-за различной геометрии расположения КРМ относительно ВПП, различной длины ВПП, влияния эксплуатационных факторов ток на выходе КРП,
используемый в качестве сигнала углового отклонения самолета от курсовой линии, зависит не только от ЕК , но и от Б! (I; = 8( ек).
При проектировании СТУ принимают некоторую расчетную крутизну
8,Е р, которая для каждого конкретного захода на посадку может существенно отличаться от фактической. Коэффициент, учитывающий отличие
фактической крутизны сигнала РТС от расчетной:
где Кз- коэффициент, учитывающий разброс крутизны, вызванный различиями в
длине ВПП и расстоянии от КРМ до ВПП; Ь, -коэффициент, учитывающий разброс
крукизны, вызванный нестабильностью характеристик РТС.
372
Коэффициент к.в однозначно определяется расстоянием от КРМ до
порога ВПП О8 и расстоянием от КРМ до передней кромки ВПП О п :
14 = Об/Ор • Диапазон ^5 оказывается наибольшим для самолетов с
малыми посадочными дистанциями, которые эксплуатируются как на
коротких, так и на длинных ВПП. В этих случаях Кз ё 0,6 ~ 1,4. Нестабильность характеристик РТС может приводить к изменению крутизны на 35%.
Таким образом, к., = 0,65 -г- 1,35.
Влияние изменения крутизны 8; на динамику траекторного движения
наиболее сильно проявляется на больших удалениях от ВПП. По мере
приближения к ВПП влияние коэффициента 1с^ уменьшается, а на уровне
порога ВПП характеристики системы «самолет-САУ» изменяются лишь
в связи с нестабильностью характеристик РТС.
Наличие высокочастотной составляющей помехи ег в радиотехническом
сигнале ек существенно затрудняет процесс пилотирования самолета при
заходе на посадку. Особенно это влияние проявляется в динамике угловых
движений самолета (траекторное движение, являясь более медленным, не
успевает существенно измениться). Обычно качество углового движения
самолета при заходе на посадку считается удовлетворительным, если
амплитуда колебаний самолета по крену вследствие действия помех не
превышает 2-3°. Для обеспечения этого требования необходимо предусмотреть на борту эффективную фильтрацию высокочастотной составляющей помехи в сигнале е к . Такая фильтрация реализуется как на выходе
с помощью апериодического фильтра с постоянной времени Ткрп = 0,1 -г~- 0,3 с, так и на входе СТУ с помощью апериодического фильтра с постоянной времени Тф = 1,5 н- 2,5 с. Закон формирования сигнала заданного
крена в этом случае имеет вид
Узад =т р Ф + 1 ( Х . в к + ]Чё к ].
С11'6)
Наличие фильтра кф/(Тф + 1) позволяет ослабить действие помех,
начиная с частоты соф = 1/Тф. Фильтр 1с,,рп /(Ткрп р + 1) вводит дополнительное ослабление, начиная с частоты ш^,, = 1/Ткрп .
Однако при формировании сигнала заданного крена приходится столкнуться с еще одной трудностью. Как известно, физического датчика,
измеряющего скорость углового отклонения самолета от равносигнальной
линии курса вк, на борту не существует. Поэтому приходится дифференцировать сигнал ек , а вместе с ним и высокочастотную составляющую помехи
ЕГ . При этом относительный уровень помех существенно увеличивается.
Для дополнительной фильтрации этих помех в закон управления с учетом того, что ЁК = рек , необходимо ввести еще один апериодический фильтр
с постоянной времени Тф2 = 2 -г- 3 с:
Уменьшив действие высокочастотной составляющей помехи с помощью
фильтров, мы ввели запаздывание в сигнал у зад , что негативно сказывается
на динамике управления самолетом. Поэтому в законе управления (11.7)
373
необходимо предусмотреть меры по компенсации этого запаздывания.
Одним из эффективных путей решения этой задачи является организация
операционных сглаживающих фильтров, идея которой заключается в
следующем.
Если на вход апериодического фильтра помимо сигнала и, содержащего
высокочастотную помеху иг , подать сигнал производной Три, то на выходе
фильтра мы будем иметь сигнал без временной задержки и ослабленный
сигнал иг/(Тр + 1):
Для реализации этого метода в законе (11.7) необходимо было бы
использовать сигнал Т ф ре к , но дифференцирование сигнала ек увеличивает
уровень помех. Поэтому целесообразно использовать какой-то другой
аналог сигнала Т ф ре к от другого физического датчика с иным спектром
помех. В качестве такого сигнала широко используется сигнал ТфрД\|/
с гироскопической курсовой системы, пропущенный через апериодический
фильтр 1/(Т,,,р + 1) с постоянной времени, Тж = Тф и Т ф2 :
.
Т
ФР
Как известно, спектр помех сигнала Д\|/ лежит в низкочастотной
области, что позволяет эффективно использовать этот сигнал для устранения запаздываний, вносимых постоянными времени Тф и Тф2 .
На этапе захода на посадку предъявляются очень жесткие требования
к точности выдерживания траектории. Поэтому необходимо обеспечить
астатичность управления по отношению к боковому ветру, возмущающим
моментам М хв и М у в . Статические ошибки могут также возникать из-за
неточности выставки посадочного курса, дрейфов гироскопических датчиков и вычислительных устройств, погрешностей гировертикалей и КРП.
Если канал крена САУе не астатичен (имеет, например, жесткую
обратную связь в сервоприводе), то устранение статических ошибок
возлагается на вычислитель СТУе . Все рассмотренные до сих пор в этом
разделе законы формирования управляющего сигнала у зад являются
статическими. Для обеспечения частичного (по отношению к некоторым
возмущающим факторам) или полного астатизма используют различные
методы.
Например, можно добиться частичного астатизма от действия бокового
ветра, если известны угол сноса и скорость ветра. Тогда экипаж вводит
в ПНП поправку к заданному курсу ВПП и тем самым частично компенсирует влияние бокового ветра, уменьшает статическую ошибку по боковому отклонению. При этом самолет разворачивается к посадочному курсу
на угол, равный углу сноса:
Узад = Ч е. + Ч ё, + ьу- (Ах|/зк - ?„) . .
(1 1 .9)
> Однако в связи с тем, что в последних модификациях СТУе сигнал
Д\|/зк на заключительном этапе четвертого разворота (в линейной зоне
374
сигнала Е К ) не используется, такой метод обеспечения астатизма неприемлем.
Можно обеспечить астатизм введением в закон управления сигнала,
пропорционального интегралу углового отклонения от равносигнальной
линии курса:
Уэад = Ч е '+ Ч Бк +-рН •
(НЛО)
Такой вывод следует из общей теории астатических САУ. Введение
интеграла в правую часть законов управления широко используется на
маршруте в длительных стационарных режимах. Однако известен один
недостаток таких законов управления. Введение интеграла повышает
порядок колебательности системы, увеличивается перерегулирование. Для
сравнительно непродолжительного этапа захода на посадку эти недостатки
могут свести к нулю преимущества обеспечения астатизма, так как сам этот
этап может закончиться до того момента, когда статическая ошибка будет,
наконец, сведена к нулю.
Для того чтобы уменьшить влияние интегральной составляющей закона
управления на динамику (колебательность) процессов, можно, например,
этот сигнал включать в закон при небольших отклонениях е к . Однако это
требует использования в составе СТУ дополнительных логических и
коммутирующих устройств, что ведет к ее усложнению.
Еще одним способом уменьшения статических ошибок является введение в закон управления положительной обратной связи по заданному
крену:
Уэад = Ч 6* + Ч ёк + Ч„ Узад'
О 1Л ^
Это придает контуру управления интегрирующие свойства и, кроме
того, уменьшает запаздывание, вносимое фильтрами.
На начальном этапе выполнения четвертого разворота использование
для управления только сигнала ек приводит к созданию противоположного
крена и развороту самолета от ВПП. Поэтому в законе управления
необходим сигнал Д\|/ зк :
•у
=1с Б ~г~1с- б Ч~Рл Дм/
(11 12)
(0
при | Д\|/зк | « Д\|/0 |;
где Рдш = 1
Д\)/0-пороговое значение Д\|/ зк , при котором
* (. соп81, при | Дузк | > | Д\)/ 0 1;
сигнал Д\|/эк отключается.
Сигнал РДч, Д\|/ может быть получен, например, с помощью ограничителя Р!
где Р! Д\|/31( = \ у
(. СОП81
,»3*,^,»°,
при | Дузк | > | Дх|/ 0 1.
375
Цифроаналоговыс СДУ и САУ.
ШХ
г
Повышение требований к точносх
ти и надежности захода на посадку
инс
обусловили переход на цифроанабз
Ух
" >> ь//Я
Т*а
логовую схемотехнику в реализации систем директорного и авто" х
матического управления заходом
Уг
БВУП •
»| сэя
на посадку (рис. 11.4). Такие сисДА ^
темы в качестве входной инфорДкрм _
мации используют сигналы с инерив»
._.
циальной навигационной системы
ИНС, пропорциональные угловой
скорости крена ю х , углу крена у,
боковой перегрузке п г , текущему
("Ш7
курсу \|/ ж , путевому углу Ч*, продольной составляющей путевой
Рис. 11.4. Функциональная схема цифроскорости У х . С радиотехнической
аналоговой системы директорного и автоматического управления заходом на посистемы инструментальной посадсадку в боковой плоскости
ки РТС СЯ/71.Х поступает сигнал,
пропорциональный угловому отклонению самолета от равносигнальной линии курса е к . С радиотехнической системы микроволновой системы посадки РТС МЫ} принимаются
сигналы, пропорциональные отклонению от азимута ДА и дальности Вкрм
до курсового радиомаяка, а также углу наклона глиссады 0 Г Л . Радиовысотомер выдает сигнал, пропорциональный истинной высоте полета Н„.
С комплексного пульта радиотехнических систем КП РТС поступает
сигнал, пропорциональный заданному путевому углу взлетно-посадочной
х
у1
Пг
х
е
*» ;
/ </
ПОЛОСЫ Ч'впп .
Рис. 11.5. Структурная схема формирования сигнала заданного угла крена в цифроаналоговой САУ в режиме АЗП
376
Формирование законов управления элеронов и рулей направления в
режиме автоматического управления, а также закона управления командным индексом в режиме директорного управления осуществляется в цифровом блоке вычислителя управления полетом БВУПГ.
Особенностью режимов ДЗП и АЗП в боковом канале является наличие
трех вариантов управления: без комплексирования информации по сигналам РТС СПДЬ8 и ИНС, с комплексированием информации по сигналам
РТС СП/1Ь8, ИНС и РВ, с комплексированием информации по сигналам
РТС МЬ8, ИНС и РВ.
Первый вариант базируется на широко применяемом в аналоговых
САУ алгоритме формирования заданного угла крена на основе двух
сигналов: ек и (Т — 4*впп). Второй вариант алгоритма управления в фазе
стабилизации самолета на курсовой линии кроме сигналов ек и (Ч* — Ч*впп)
используется информация о высоте Ни для формирования сигнала, пропорционального линейному отклонению от оси ВПП г, а также информация о Ух для формирования сигнала, пропорционального скорости линейного отклонения г. Третий вариант алгоритма управления в качестве
информации' о боковом отклонении г использует сигналы ДА, Окрм и 9ГЛ .
Сигнал, пропорциональный 2, формируется так же, как во втором варианте
алгоритма, сигнал, пропорциональный (Ч* — Ч*впп )г~так же> как в первом
варианте алгоритма.
Структурная схема формирования сигнала заданного угла крена в
цифроаналоговой САУ в режиме АЗП представлена на рис. 11.5. Сигнал
у^ затем подается в точку А структурной схемы цифроаналогового
автопилота угла крена (см. рис. 9.22).
11.1.2. Моделирование управления боковым траекторным
движением
Для исследования динамики процессов автоматического управления
заходом на посадку в горизонтальной плоскости воспользуемся моделью
бокового траекторного движения (4.16)-(4.18). При этом вместо кинематического уравнения движения относительно бокового отклонения Аг
необходимо использовать кинематическое уравнение относительно углового отклонения АЕ К с учетом того, что
= Окрм 8т Ае, ^
Тогда
где \,& = а2 р/О.рм, ае>|1(/ = аг ,,,/
Математическая модель замкнутой системы «самолёт- С АУ^» принимает следующий вид:
(1 1.13)
(11.14)
377
(1),
Дш„(1) "
4,5,
Дсоу(1)
0
Др(1)
где
)=
,
Ду(1)
'
0
Дх|/(1)
0
ДеЛО
0
" ч.»,
А6т =
0
в^6т =
°
"Ч,Р
о
о
о
0
а и>>Му
аШу)р
0
0
0
0
а Му
а р .р
ар,у
0
0
ау,ю
°
0
0
0
0
0
а^ц,
0
0
0
0
0
0
а 8(1 р
0
а е _ >ж
0
О
О
Получим матрицу передаточных функций по параметрам бокового
движения на внешние возмущения
Аб1
- ВУ6Т
1
ВВ6Т =
САУе
где Ф6т '(р)- переходная матрица состояния по параметрам бокового движения
самолета с САУе .
11.2. ДИРЕКТОРНОЕ И АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
ПРОДОЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ПРИ ЗАХОДЕ НА
ПОСАДКУ
11.2.1. Системы директорного и автоматического
управления продольным траекторным движением
Принцип действия. Управление продольным траекторным движением
самолета при заходе на посадку производится пилотом визуально по
наземным ориентирам и показаниям приборов. Наблюдая за изменением
углов тангажа и атаки, высоты и вертикальной скорости, пилот воздействует на колонку штурвала и отклоняет рули высоты таким образом,
378
Рис. 11.6.
Функциональная
схема системы директорного
управления угловым отклонением от равносигнальнои
линии глиссады
из
ТВ
ГРП
7>,
всгаг
и,г л
ВПКП
"бн ^
ПКП
чтобы выдержать предпосадочную траекторию снижения. Системы директорного и автоматического управления в продольном канале служат для
облегчения пилоту решения этой задачи.
Система директорного управления угловым отклонением от равносигнальной линии глиссады (СДУ% ) обеспечивает стабилизацию и управление продольным траекторным движением самолета при заходе на посадку
путем выдачи пилоту сигнала в виде отклонения командной стрелки
прибора при возникновении углового отклонения самолета от равносигнальной линии глиссады.
Простейшая СДУег реализует следующий закон управления командной
стрелкой:
еду _ ь /,._.. \ ,. _ 1А _ . (А А
(11.17)
еду
где ан -отклонение продольной командной стрелки прибора по сигналу СДУ;
ка -передаточный коэффициент по отклонению продольной командной стрелки,
определяющий, на сколько миллиметров должна сместиться стрелка при отклонении
текущего угла тангажа от заданного на 1°; о, изад-текущее и заданное значения угла
тангажа; е г , ё г - соответственно угловое отклонение и скорость углового отклонения
самолета от равносигнальнои линии глиссады; к^,', 1с„г-передаточные коэффициенты
по углу тангажа соответственно на угловое отклонение от равносигнальнои линии
курса и на скорость этого отклонения.
Рассмотрим функциональную схему аналоговой СДУег (рис. 11.6).
В состав системы входят датчик текущего угла тангажа гировертикаль ГВ,
датчик отклонения самолета от равносигнальнои линии глиссады-глиссадный радиоприемник ГРП, формирователь сигнала заданного угла тангажа-вычислитель системы траекторного управления ВСТУи, формирователь командного сигнала-вычислитель пилотажно-командного прибора
ВПКП и указатель командного сигнала -пилотажно-командный прибор
ПКП.
Рассмотрим процесс выхода самолета на равносигнальную линию
глиссады в режиме директорного управления по командной стрелке
пилотажно-командного прибора.
До момента пересечения равносигнальнои линии глиссады горизонтальная командная стрелка ПКП будет находиться в верхнем положении,
указывая местонахождение самолета относительно равносигнальнои линии. «Захват» глиссады происходит при пересечении самолетом равносигнальной линии, в результате чего пилоту выдается автоматический
сигнал на командное табло. При этом горизонтальная командная стрелка
постепенно опускается в центр прибора ПКП. Пилот может сам нажать
кнопку-лампу «Глиссада» на пульте управления СТУ в момент пересечения
самолетом глиссады, т. е. когда горизонтальная стрелка прибора ПКП
подойдет к центру кружка.
379
После уверенного «захвата»
глиссады пилот стабилизирует самолет на глиссаде. При отклонении командной стрелки вниз, показывающей нахождение самолета
«над глиссадой», пилот, отклоняя
колонку штурвала «от себя», вводит самолет в пикирование. В результате отклонение командной
стрелки вниз сначала замедляется,
ла
затем прекращается и, наконец,
лнг
командная стрелка постепенно наРис. 11.7. Переходные лроцесы возвраще- чинает возвращаться в нейтральния самолета на глиссаду
ное положение. Пилот, воздействуя на колонку штурвала, устанавливает рули высоты в балансировочное положение, удерживая командную'
стрелку в центре прибора.
Если самолет в результате вертикального маневра окажется «под
глиссадой», то командная стрелка уйдет вверх и пилот скорректирует
вертикальный маневр взятием колонки штурвала «на себя».
Управление самолетом относительно глиссады осуществляется созданием приращения подъемной силы А У 0 . Если самолет находится ниже
глиссады АНГ < 0 и летит по параллельной траектории (рис. 11.7), то для
приведения его на глиссаду необходимо использовать неравенство сил,
действующих на самолет по оси ОУ. Для возвращения самолета на
заданную траекторию необходимо иметь положительное приращение
подъемной силы ДУ > 0. Этого добивается пилот, отклоняя руль высоты
вверх Д§в < 0, что приводит к развороту продольной оси самолета по
тангажу на угол До > 0. Одновременно начинает увеличиваться и угол
атаки Да > 0, что приводит к увеличению подъемной силы ДУ > 0.
В начале переходного процесса угол атаки будет увеличиваться почти
одновременно с увеличением угла тангажа. Однако по мере разворота
вектора скорости V приращение угла атаки сначала замедлится, а затем
устремится к нулю. В результате начнет увеличиваться угол наклона
траектории Д0 = Ди — Да, который постепенно станет равным приращению
угла тангажа. Самолет с заданным приращением угла тангажа начнет
приближаться к глиссаде, т. е. линейное отклонение ДНГ начнет уменьшаться.
С учетом инерционности движения самолета пилот отклоняет руль
высоты вниз Д5В > 0, что приводит к развороту продольной оси самолета
по тангажу и постепенному уменьшению приращения Д». Угол атаки
получит отрицательное приращение Да < 0, подъемная сила начнет уменьшаться ДУ < 0. По мере разворота вектора скорости приращение угла
атаки станет равным нулю, угол наклона траектории станет равным углу
наклона глиссады Д0 = 0ГЛ, как в начале выполнения маневра, а линейное
отклонение от глиссады ДНГ станет равным нулю, т. е. самолет вернется на
глиссаду.
380
В случае выполнения маневра по минимуму, соответствующему I категории ИКАО, экипаж предпочитает пользоваться директорным режимом
для выдерживания самолета на заданной траектории, даже если у него есть
возможность перейти на автоматический режим. Это объясняется желанием уменьшить время адаптации при переходе на режим ручного управления самолетом по видимым наземным ориентирам.
Обычно в режиме директорного захода на посадку САУ работает, как
система устойчивости и управляемости, решая задачи внутреннего контура
автоматического управления. В этом случае САУ парирует угловые колебания самолета, а отклонение рулей высоты определяется как сигналом
автоматики, так и сигналом ручного управления.
По мнению авиационных специалистов, минимальная высота использования директорного режима в реальных условиях посадки не превышает
45 м. Ниже этой высоты при отсутствии видимости наземных ориентиров
должен использоваться режим автоматического управления заходом на
посадку.
Система автоматического управления угловым отклонением от равносигнальной линии глиссады (САУе ) обеспечивает стабилизацию и управление продольным траекторным движением самолета при заходе на посадку
путем отклонения рулей высоты при возникновении углового отклонения
самолета от равносигнальной линии глиссады.
Простейшая САУ8 реализует следующий закон управления рулями
высоты:
оСАУе г _ ,
где 5В
,
,.
_ д
,
.
_ ,бг
, бг .
,. . .„>
^-отклонение рулей высоты с помощью САУе г .
Функциональная схема аналоговой САУе (рис. 11.8) включает наряду
с элементами системы СДУе датчик угловой скорости тангажа ДУС,
вычислитель автопилота тангажа ВАШ и сервопривод рулей высоты С778В.
Работа САУе по формированию сигнала, пропорционального заданному
углу тангажа, Аналогична работе СДУЕ . Отработка этого сигнала на рули
высоты осуществляется, как в автопилоте угла тангажа.
Особенности законов управления. Как видно из законов управления
командной стрелкой СДУе и рулями высоты САУе (11.17) и (11.18), для их
формирования используется сигнал заданного угла тангажа омд либо
заданное приращение угла тангажа Ао зад . Эту задачу решает вычислитель
продольного канала СТУ.
Рассмотрим различные способы формирования управляющего сигнала.
В простейшем случае сиглал »_„д формируется пропорционально угловому
Рис. 11.8. Функциональная схема системы автоматического управления
угловым отклонением от
равносигнальной линии
курса
отклонению самолета от равносигнальной линии глиссады. Однако это не
обеспечивает демпфирование траекторных колебаний самолета относительно равносигнальной линии глиссады. Для обеспечения устойчивости
движения самолета в закон управления необходимо ввести сигнал скорости
углового отклонения ёг .
Вообще говоря, наиболее логичным способом формирования сигнала
заданного тангажа является использование для этой цели информации
о линейном отклонении самолета от глиссады АН Г , которое ввиду малости
углов наклона глиссады и угловых отклонений от глиссады можно считать
отклонением самолета по высоте от глиссады. Это линейное отклонение
связано с угловым отклонением соотношением
где Вгрм (I) -текущее расстояние от самолета до ГРМ.
Однако отсутствие на борту самолета датчика, измеряющего линейное
отклонение ДН Г , и трудность формирования сигнала вертикальной скорости рАНг обусловили использование в законах управления в качестве
основного управляющего сигнала ег с глиссадного радиоприемника (ГРП),
а также его производной ёг .
Линейное отклонение от глиссады АНГ в зависимости от расстояния
Вгрм (I) будет различным при ег = сопз!. В связи с этим появляется
необходимость корректировки передаточных коэффициентов ке = Г [Вгрм(1)]
и к4 = Г[Вгрм(1)] в функции расстояния Вгрм(1). Расстояние Огрм(1) от
момента захвата глиссады до момента схода с глиссады в зависимости от
угла наклона глиссады 0ГЛ меняется в широких пределах и может
отличаться более чем на порядок (например, 8000 и 600 м). Следовательно,
более чем на порядок должны меняться и коэффициенты КЕ и к6 .
Поэтому получить качественные переходные процессы захода на
посадку на больших и малых удалениях от ГРМ довольно трудно. Причем
диапазон относительного изменения дальностей до ГРМ почти в 2 раза
превышает диапазон относительного изменения дальностей до КРМ, что
делает задачу коррекции передаточных коэффициентов в продольном
канале СТУ более актуальной. Методы коррекции передаточных коэффициентов основываются либо на ослаблении сигнала с ГРМ в функции
дальности, либо на 'косвенном учете дальности по сигналам с радиовысотомера или маркерных маяков.
Ток на выходе ГРП, используемый в качестве сигнала углового отклонения самолета от глиссады снижения, зависит от значения этого отклонения
ег и от крутизны зоны 8Г :
В свою очередь крутизна 8е зависит от угла наклона глиссады снижения
6ГЛ и допусков на параметры ГРМ и ГРП. Встречающиеся в эксплуатации
минимальные крутизны 8е т1п могут отличаться от максимальных 8Е тах
в 5-6 раз. Расчетная крутизна (5Ег)
, выбираемая при проектировании
СТУ,
382
Соответственно должны выбираться передаточные коэффициенты законов управления. Рассмотрим особенности формирования законов управления СТУ с учетом действия помех. В продольном движении, как и в боковом, помехи, лежащие в высокочастотной области спектра, не представляют большой опасности для управления вследствие инерционности самолета. Эти помехи отрицательно влияют на режим работы контура сервопривода и затрудняют пилотирование по командной стрелке. Для подавления помех на выходе ГРП устанавливают апериодические фильтры с
постоянной времени Тгрп = 0,1 -г- 0,3 с. Однако этого недостаточно и
дополнительные фильтры с постоянной времени Тф = 0,5 н- 2,5 с вводят
также в закон управления СТУ:
«зад = ^~П [Ч ег + Ч ёг ] -
(Н.19)
Для дополнительной фильтрации помех в сигнале производной ёг
вводят фильтр с постоянной времени Тф2 :
01.20)
Сигнал ёг можно получить лишь путем дифференцирования сигнала ЕГ ,
что приводит к трансформации закона:
Вместе с дифференцированием сигнала ег дифференцируется и высокочастотная составляющая помехи, содержащаяся в нем ег , что существенно
понижает помехозащищенность закона управления.
Вместо сигнала рег в законе управления в принципе может использоваться сигнал рАН, не содержащий высокочастотной помехи. Однако
получение этого сигнала связано с рядом трудностей. Так, наиболее
распространенные измерители вертикальной скорости -вариометры -обладают значительным запаздыванием. В первом приближении можно полагать, что вариометр имеет передаточную функцию апериодического звена с
постоянной времени т, определяемой параметрами капилляра. Другой
способ получения сигнала рАН основывается на принципе интегрирования
вертикального ускорения. Однако этот способ не обладает высокой
точностью.
Поэтому существуют варианты законов управления СТУ с комплексным использованием информации от этих двух датчиков. При этом сигнал
р 2 АН пропускается через фильтр с постоянной времени т
РАН
тр + 1
+
А Н
тр + 1
Введенный в закон управления (11.21) апериодический фильтр вносит
запаздывание с постоянной времени Т Ф 2 . Методы компенсации, применяе383
мне в продольных каналах СТУ, основываются на использовании фильтров, как и в боковом канале СТУ.
Так, для компенсации запаздывания сигнала производной рег необходимо на вход фильтра подать сигнал, пропорциональный производной
следующего порядка р 2 е г , либо р2АН. Воспользуемся кинематическим
соотношением рАН = V (и — а). Тогда при V = сопз1
Г
~Тар+1
Таким образом, для получения сигнала, пропорционального второй
производной отклонения от глиссады, необходимо продифференцировать
сигнал тангажа и пропустить его через фильтр с постоянной времени
Т„ = Т •
Ъ
и
_
,
^Ф2
.
•
,
Ц>зР
I
е
8
и
~1П
+ 11Ч г + т—т~гт
Т , Р + 1Ч г + ^———т
Т.,., Р + 1 •
^
(11.22)
Л
Для повышения точности стабилизации самолета на глиссаде прибегают к компенсации возмущений, вызываемых изменением угла наклона
траектории при переходе от горизонтального полета к снижению. Для
этого в момент «захвата» глиссады вводится сигнал, пропорциональный
среднему углу наклона глиссады (вгл ё 3°). Это позволяет значительно
улучшить переходные процессы в начале снижения самолета по глиссаде.
Для того чтобы постоянный сигнал 6ГЛ не способствовал появлению
статических ошибок, его пропускают через изодромный фильтр:
Полученное выражение для «зад (11.23) можно теперь использовать
в законе управления командной стрелкой (11.17). Астатизм управления по
тангажу обеспечивается пилотом, обладающим интегрирующими свойствами. Сложнее дело обстоит с обеспечением астатизма в режиме автоматического управления. Пусть сигнал изад формируется в простейшем
виде. Тогда для обеспечения 5В = 0 в установившемся режиме
т.е. будет иметь место статическая ошибка
1^г /уст ~ ~\~ ^уст '
Е
г
которая может быть лишь уменьшена выбором большого значения
передаточного коэффициента 1се .
Для борьбы с этим явлением сигнал текущего угла тангажа пропускают
через изодромный фильтр:
384
Тогда для обеспечения 5В = 0 в установившемся режиме при р = О
Нт
Т„Р
р-»0
— к, ег
•0.
Таким образом, закон управления САУег имеет вид
5. =
Т„Р
ТфзР
(11.24)
ТфзР+11
Цифроаналоговые СДУ и САУ. В состав системы входят (рис. 11.9)
датчики скорости тангажа ю г , угла тангажа и, нормального ускорения а у ,
продольной и нормальной составляющих скорости У х и Уу-бесплатформенная инерциальная навигационная система БИНС, датчик углового
отклонения от равносигнальной линии глиссады ег-радиотехническая
система инструментальной посадки РТС СП/1Ь8, датчик углового отклонения от глиссады А0Г и дальности до глиссадного радиомаяка Дгрмрадиотехническая система микроволновой посадки РТС МЬ8; датчик
истинной высоты Ни-радиовысотомер РВ, датчик отклонения закрылков
5М1. ДОЗ, вычислительный блок управления полетом БВУП, сервопривод
руля высоты С1Ка и индикатор положения самолета на глиссаде-система
электронной индикации СЭИ.
Режим автоматического управления заходом на посадку включает три
фазы: подготовка глиссады, выход на глиссаду и стабилизация глиссады.
Существуют две принципиальные возможности подготовки глиссады и
выхода на глиссаду. Первая возможность предусматривает выдачу команды «Захват глиссады» после пересечения равносигнальной линии глиссады.
Однако в этом случае возможны значительные перерегулирования и
вертикальная скорость. Чтобы избавиться от этого недостатка, формируют команду «Захват глиссады» до пересечения равносигнальной линии глиссады.
Условия включения фазы выхода самолета на глиссаду следующие:
е г З* -е*,, ё г >0, V < V*
где е г1 , е г2 , У у - заданные значения
отклонения самолета от равносигнальной линии глиссады и вертикальной
скорости.
Скорость отклонения самолета
2^1™^?^^^
от равносигнальной линии глисса- тематического управления заходом на поды ег может быть получена либо садку в продольной плоскости
13 Зак. 948
385
Рис. 11.10. Структурная схема формирования сигнала приращения заданного угла
тангажа в цифроаналоговой САУ в режимах ДЗП и АЗП
дифференцированием е г , либо с использованием информации о скорости
V,, высоте Н н , угле наклона глиссады 0Г и крутизне радиотракта маякприемник 8 Г :
Условия включения фазы стабилизации глиссады следующие:
I ег К ег*, , I V, - (Уу )раоч | < А У, , (Уу )расч = |^ < (V, ^ ,
где АУ*у , (У, )*расч - заданные значения отклонения текущего значения вертикальной
скорости от расчетного значения и расчетное значение вертикальной скорости.
В основу алгоритмов управления в режимах автоматического и директорного захода на посадку положен принцип комплексирования, заключающийся в совместном использовании датчиков пилотажно-навигационной
информации, спектры ошибок которых лежат в различных частотных
диапазонах. Так, сигнал с инструментальной системы посадки содержит
высокочастотный шум, но имеет небольшую ошибку смещения и не
подвержен дрейфу. С другой стороны, сигнал с БИНС не имеет высокочастотного шума, но подвержен дрейфу и может иметь ошибку смещения.
Совместное использование этих сигналов позволяет получить скорректированный сигнал, обладающий лучшими характеристиками, чем любой из
отдельно взятых сигналов.
386
Структурная схема формирования заданных значений приращения угла
а>
тангажа в режимах ДЗП и АЗП представлена на рис. 11.10. Сигнал До
формируется путем пропускания сигнала ау с БИНС через два фильтра.
Первый фильтр с достаточно большой постоянной времени Та обеспечивает исключение погрешности измерения ау . Второй фильтр с постоянными
времени Тф1 и Тф2 предназначен для ограничения частот, характерных для
короткопериодического движения
Т а ,Р+1 Т ф 2 р + 1
Сигнал Аизад формируется из двух сигналов
где Сту - сигнал разности между оценкой текущей вертикальной скорости и расчетзад
ным значением этого параметра; Сту -сигнал заданного изменения вертикальной
скорости.
Оценка текущей вертикальной скорости формируется в комплексирующем фильтре на основании информации о мгновенном значении этого
отклонения и вертикального ускорения:
Гу р + 1
у!г
-«т
Гуу2Р+1
.
У
т„
А а
у.У_._
Т а> р +
Сигнал разности
Сту = 1су (Н — Ь:^ У х ).
ад
Сигнал ау формируется из двух сигналов:
где адн -сигнал линейного отклонения от равносигнальнои линии глиссады; стсдн сигнал интеграла отклонения.
Сигнал Стдн формируется в результате нелинейной обработки сигнала
е г , обеспечивающей с помощью элемента Ре помехозащищенность при
наличии интенсивных искривлений линии глиссады. Затем ограниченный
сигнал Ре ег поступает на множительное устройство (аттенюатор), где по
сигналу Н„ с радиовысотомера происходит уменьшение коэффициента
усиления сигнала БГ по мере приближения к ВПП. Выходной сигнал АНГ
пропорционален линейному отклонению от равносигнальнои линии глиссады. В режиме захода по МЬ8 сигнал АН^Ь8 формируется на основе
сигналов Ав г , Дгрм и Н„.
Дальнейшая фильтрация помех в сигнале АНГ осуществляется с
помощью комплексирующего фильтра первого порядка. Фильтр реализован в виде интегрирующего устройства, охваченного жесткой обратной
387
связью. В течение первых 10 с после захвата глиссады коэффициент
усиления в прямой цепи фильтра равен 1/Тс2, а сам фильтр представляет
собой апериодическое звено. Затем постоянная времени увеличивается,
а коэффициент усиления 1/Тс2 уменьшается.
Запаздывание, вносимое в полезную составляющую сигнала АН Г ,
компенсируется за счет подключения на второй вход комплексирующего
фильтра сигнала (Н — к^ У х ):
а ДНг = РСГ [АНГ + (А - 1су< V,)] ^—- .
Сигнал <Т|ДН вводится для удержания самолета на линии глиссады
в случае отклонения угла наклона глиссады от расчетного значения и
погрешностей измерения вертикальной и путевой скоростей:
г
'
1 .
р
Окончательно для режима АЗП
АС = к а з п (Аи а >Для режима ДЗП
зад
гр
Т
|
\
— - зад /
дзпР+!
Сигнал Дизад подается в точку 1 структурной схемы автопилота угла
тангажа, представленной на рис. 9.14. Сигнал Ло^ад выдается в СЭИ.
11.2.2. Моделирование управления продольным
траекторным движением
Для исследования динамики процессов автоматического управления
заходом на посадку в вертикальной плоскости воспользуемся моделью
продольного траекторного движения (3.25) и (3.26). При этом вместо
кинематического уравнения движения относительно высоты АН применим
кинематическое уравнение относительно углового отклонения Аег с учетом
того, что
Тогда
Дёг(*) = а е г , а Ла + аег11) Аи,
где а е г _ а = а н , а /В грм ; а^ = а Н1 „/В грм .
'
Математическая модель замкнутой системы «самолет-САУег»
наличии внешних возмущений принимает следующий вид:
388
П
РИ
хпта) = А п т х п т (
Впт и„т(1),
(11.25)
(11.26)
(11.27)
(11.28)
где
г До>ЛО л
- 4,8. -|
Аа(1)
Ди(1)
0
у
В
"пт =
'
0
Дбг(1)
а
сог,(ог
а
а,щ,
а,, „
0
а
иг,а
0
°
а
О
О
а.а
0
е г ,а
0
0
0
Получим матрицу передаточных функций по параметрам продольного
движения на внешние возмущения
1 ввпт »
е , ,
где Фпт (р)- переходная матрица состояния по параметрам продольного движения
самолета с САУег .
Л
11.3. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ СКОРОСТИ
И УПРАВЛЕНИЕ СКОРОСТЬЮ ПОЛЕТА
11.3.1. Автоматы тяги
Принцип действия. На этапах захода на посадку и посадки важное
значение приобретает задача стабилизации скорости. Это связано с тем, что
существенное изменение конфигурации самолета (выпуск шасси, закрылков,
интерцепторов и т.д.) приводит к изменению аэродинамических силы
лобового сопротивления и подъемной силы. Это в свою очередь вызывает
389
иду
г
л
в
А
и >
\Г^
'
,
И МАТ
•'
п
*
^У
п
"
\
<•*
о„
1
УСОС
1
алт
СП 8руЗ
Рис. 11.11. Функциональная схема автомата тяги
отклонение скорости полета от заданной. Стремление снизить заданную
посадочную скорость для уменьшения длины пробега ухудшает устойчивость и управляемость самолета. Уменьшение скорости полета под
действием внешних возмущений усложняет пилотирование и может вывести самолет на критические углы атаки. Поэтому на этапах захода на
посадку и посадки стабилизация и управление скоростью полета осуществляются непосредственным воздействием на тягу двигателей. Это
объясняется большей точностью и большим быстродействием контура
управления скоростью путем изменения тяги по сравнению с контуром
управления скоростью путем отклонения руля высоты.
При ручном пилотировании во время захода на посадку задачу стабилизации и управления скоростью решает пилот. Он наблюдает за изменением скорости по указателю и, воздействуя на рычаги управления двигателями, изменяет тягу, чтобы самолет удерживал требуемую скорость или
изменял ее соответствующим образом. Автомат тяги служит для освобождения пилота от решения этой задачи.
Автомат тяги (А Т) - средство автоматического управления, обеспечивающее стабилизацию и управление продольным движением самолета на
этапах захода на посадку и посадки путем изменения тяги двигателей при
возникновении рассогласования между значениями текущей и заданной
скорости.
Простейший АТ реализует следующий закон управления рычагами
управления двигателей (РУД):
АТ
п5
(11.29)
ад ~~ V),
Р°руд =
—
где 8 р^,-автоматическое отклонение рычагов управления двигателями от балансировочного положения с помощью АТ; V, У зад - соответственно текущее и заданное
значения скорости; кду - передаточный коэффициент по скорости, определяющий, на
сколько градусов в секунду должна измениться скорость перемещения РУД при
возникновении рассогласования между значениями текущей и заданной скорости
в 1 км/ч.
Другими словами, скорость перемещения РУД пропорциональна рассогласованию между текущей и заданной скоростью полета. Как видно из
закона управления (11.29), сервопривод АТ имеет скоростную обратную
связь. Исполнительный механизм сервопривода включается по параллельной схеме в прямую систему управления двигателями. Совместное управ390
ление тягой со стороны пилота и АТ исключается. При воздействии пилота
на РУД АТ выключается и освобождает механическую проводку управления двигателями. Сервоприводы АТ выполняются, как правило, электромеханическими.
Рассмотрим функциональную схему аналогового электромеханического
АТ (рис. 11.11). В состав АТ входят задатчик скорости ЗС, датчик рассогласования между значениями текущей и заданной скорости-указатель
скорости с индексом УС-И, вычислитель В и сервопривод рычагов управления двигателями СЯ5РУД с исполнительным механизмом автомата тяги
ИМАТ. Вычислитель и сумматор сервопривода объединены в электронный
блок вычислителя автомата тяги ВАТ. Указатель скорости УС-И отличается от обычного электромеханического указателя скорости тем, что
наряду со стрелкой, показывающей значение текущей приборной скорости,
в нем имеется индекс заданной приборной скорости, управляемый пилотом
с помощью задатчика скорости ЗС. Стрелка указателя УС-И связана
с ротором бесконтактного синусно-косинусного трансформатора (БСКТ).
Индекс указателя связан с ротором синусно-косинусного трансформатора
(СКТ). Статорные обмотки СКТ и БСКТ соединены между собой. Роторная обмотка СКТ запитана напряжением переменного тока, а с роторной
обмотки БСКТ снимается сигнал переменного тока иду, фаза которого
пропорциональна рассогласованию между положением индекса и стрелки.
Этот сигнал меняется либо вследствие изменения положения стрелки и как
следствие согласованного вращения ротора БСКТ, либо вследствие отработки двигателем следящей системы индекса с одновременной отработкой
ротора СКТ.
АТ работает в четырех режимах: согласования, стабилизации, управления скоростью и «Уход». В режиме согласования в указателе скорости
УС-И происходит непрерывное «обнуление» сигнала текущей скорости
с помощью электромеханической следящей системы. В момент подачи
питания на указатель индекс заданной скорости перемещается в направлении положения стрелки текущей скорости. Когда индекс установится
напротив стрелки, сигнал с БСКТ станет равным нулю и АТ готов к работе.
Сервопривод АТ в это время не имеет жесткого зацепления с механической
проводкой управления двигателями. Таким образом происходит запоминание текущей скорости и обеспечивается подготовка АТ к безударному
включению для стабилизации скорости.
При включении режима стабилизации скорости следящая система указателя скорости размыкается и формируется сигнал разности иду между
опорным значением скорости У 0 , которую имел самолет в момент включения режима стабилизации, и значением текущей скорости. Индекс при
этом остается неподвижным и под действием внешних возмущений отклонение от опорной скорости воспринимается АТ как рассогласование, которое
необходимо парировать. Сигнал иду поступает на вход вычислителя В, где
формируется сигнал и в , пропорциональный и ду . Сервопривод преобразует
этот сигнал в перемещение рычагов ИМАТ бр/ д . С тахогенератора ТГ на
вход сумматора сервопривода поступает сигнал скоростной обратной связи
исос, пропорциональный скорости отработки рычагов ИМ А Т.
391
VIV
Рис. 11.12. Процесс устранения начального отклонения скорости с помощью автомата тяги
Таким образом, скорость отработки рычагов ИМАТ будет пропорциональна рассогласованию ДУ = У0 — V. Сервопривод будет отрабатывать РУД до тех пор, пока тяга двигателей не увеличится (уменьшится)
настолько, что скорость самолета примет заданное значение и стрелка
указателя УС-И вернется к индексу.
В режиме управления скоростью пилот, воздействуя на индекс указателя
УС-И с помощью задатчика, устанавливает заданную скорость. В результате в УС-И формируется сигнал и д у , пропорциональный АУ = У зад — V,
который отрабатывается сервоприводом так же, как рассогласование
АУ = У 0 - V.
В режиме «Уход» датчик УС-И отключается от вычислителя. Управляющий сигнал ив формируется вычислителем независимо от параметров
положения и движения самолета таким образом, что сервопривод плавно
с постоянной скоростью перемещает РУД во взлетное положение.
Исполнительный механизм ИМАТ, кроме двигателя-генератора, включает редуктор, муфты сцепления и предельного момента, а также предохранительную муфту. Муфта сцепления соединяет двигатель-генератор с редуктором. Предохранительная муфта устанавливается на входном валу
механизма и обеспечивает возможность управления двигателем при заклинивании муфты предельного момента или шестерен редуктора. Приложив
соответствующее усилие к РУД, пилот может «пересилить» АТ и установить РУД в желаемое положение. Рабочий диапазон перемещения рычагов
ИМАТ ограничен концевыми выключателями.
-Управление движением и особенности законов управления. Качество
работы АТ и ее влияние на процесс управления продольным движением
оцениваются по качеству переходных процессов управления скоростью.
Рассмотрим процесс устранения начального отклонения скорости
^о — V (рис. 11.12) с помощью АТ с законом управления (11.29). Появление
рассогласования по скорости АУ в момент времени 11 начинает парироваться АТ перемещения РУД со скоростью р5р у т д . Поначалу будем
предполагать, что стабилизация скорости с помощью АТ происходит во
время предпосадочного маневра, когда САУН стабилизирует высоту и угол
наклона траектории воздействием на руль высоты. Тогда изменения углов
атаки и тангажа парируются САУ Н .
392
В результате изменения тяги двигателей будет изменяться скорость
самолета и в момент времени 12 рассогласование ДУ станет равным нулю.
Однако вследствие инерционности двигателей и самолета производная АУ
будет присутствовать. Поэтому самолёт проскочит опорное значение скорости. Это вызовет изменение знака АУ и отработку РУД в обратную
сторону.
Для демпфирования колебаний самолета по скорости в закон управления АТ должен обязательно включаться сигнал, пропорциональный АУ.
Достаточно точного и надежного датчика этого сигнала на эксплуатируемых ВС нет, поэтому приходится использовать операцию дифференцирования, заменяя ДУ на АУ ТурДТур + 1). Тогда закон управления АТ
принимает следующий вид:
Тур
+
АУ,
(11.30)
где Ку, Ту -соответственно передаточный коэффициент по воздушному ускорению
и постоянная времени изодромного фильтра.
Тогда в начале устранения рассогласования АУ благодаря наличию
сигнала, пропорционального АУ, АТ увеличит скорость отработки РУД,
а затем притормозит. Это обеспечит плавный апериодический выход
самолета на заданную скорость, как это показано на рис. 11.12.
Однако, как известно, изменение скорости полета самолета вызывает
изменение углов тангажа и атаки, что в свою очередь приводит к изменению скорости. При расмотрении принципа действия САУУ было обращено внимание на связь между колебаниями угла тангажа и скорости.
Причем изменение угла тангажа опережает изменение скорости, так как
носит короткопериодический характер. Поэтому процесс устранения начального отклонения АУ с помощью АТ принимает более сложный
характер. Для демпфирования колебаний самолета по скорости в закон
управления АТ включается сигнал, пропорциональный приращению угла
тангажа.
Так как сервопривод АТ охвачен скоростной обратной связью, вместо
сигнала Аи необходимо использовать его производную ро. Тогда хорошее
демпфирование колебаний самолета по скорости будет осуществлять АТ со
следующим законом управления:
Т„р
Тур
р5*т„ = кду (Узад - V) + к0 ——т о + ку — — АУ, (11.31)
1йр + 1
1ур + 1
где Кй, Т(,- соответственно передаточный коэффициент по скорости изменения угла
тангажа и постоянная времени изодромного фильтра.
Существенной проблемой в достижении требуемой точности управления
скоростью является наличие высокочастотной составляющей помехи Гу
в сигнале АУ с УС-И. Для подавления помехи сигнал АУ пропускается через
апериодический фильтр с постоянной времени Ту . Тогда удается умень393
Рис. 11.13. Структурная схема автомата тяги
шить влияние пульсаций скоростного напора из-за атмосферной турбулентности и закон управления (11.30) принимает вид
1
Т<ф
у(У„ - V) + ^
1
АУ .
(1 1.32)
Однако введение фильтра вносит запаздывание в процесс управления,
что особенно нежелательно в сравнительно быстродействующем контуре
управления скоростью через тягу двигателя. Для борьбы с запаздыванием
Используется метод операционного сглаживания. Метод реализуется с помощью апериодического фильтра с постоянной времени Т у , на который
наряду с зашумленным сигналом (АV + Г у ) подается незашумленный сигнал производной ТурАУ. Тогда на выходе фильтра будем иметь полезный
сигнал АУ без временной задержки и подавленную помеху:
1
АУ +
(Тур +
Тур+1
(11.33)
Однако проблемой является получение незашумленного сигнала производной рАУ. Использование для этой цели производной АУ, присутствующей в законе управления (11.32), не годится, так как ойа сама содержит
те же высокочастотные помехи, усиленные операцией дифференцирования.
Поэтому целесообразно для этого использовать сигнал-аналог производной рАУ с датчиков другой физической природы с другим спектром
помех.
В современных АТ в качестве таких датчиков используются пружинный
акселерометр и гировертикаль. Так как корпус акселерометра жестко
скреплен с самолетом, он измеряет проекцию вектора перегрузки п на
связанную ось ОХ п х , которая связана с проекцией вектора ускорения на
связанную ось ]„ = п, §. В прямолинейном полете проекция вектора уско394
рения на скоростную ось ОХа ]к следующим образом определяется через ] х ,
угол тангажа и ускорение свободного падения: ]х> ^х — §8ши ^ ^x — §и.
В то же время ]х = рДУ. Тогда вместо сигнала рАУ можно использовать
разность сигналов §(пх — о). Закон управления АТ при этом принимает
следующий вид:
ту8(пх-о)].
<п-34>
Аналогичные проблемы возникают с помехами в сигнале А'у' и запаздыванием, вносимым фильтром 1/(Тур +1) при прохождении через него
сигнала АУ в законе управления (11.32). Поэтому для устранения запаздывания и подавления помехи используется тот же метод. Тогда закон
управления принимает следующий вид:
^дуТдур(11.35)
До сих пор мы рассматривали вопрос стабилизации скорости в горизонтальном полете. Проведя аналогичные рассуждения применительно
к полету по наклонной траектории, когда А0 Ф О (снижение на ВПП),
можно показать, что изменение угла наклона траектории приводит к появлению статических ошибок, так как является возмущающим фактором.
Поэтому было бы целесообразно в закон управления АТ включить составляющую, пропорциональную А6. Однако, как известно, пока на борту ВС
отсутствуют датчики такого сигнала. Поэтому вместо сигнала А0 используют сигнал Аи, получаемый пропусканием сигнала с гировертикали через
изодромный фильтр с постоянной времени Т0. С учетом интегрирующего
сервопривода этот сигнал необходимо еще раз продифференцировать.
Тогда закон управления АТ принимает следующий вид:
1
Тур+1
Структурная схема АТ (рис. 11.13) реализует закон управления (11.36).
Цифроаналоговые автоматы тяги. Общим недостатком современных
аналоговых автоматов тяги является их неблагоприятное влияние на
двигатели, выражающееся в слишком большом числе управляющих воздействий и приводящее к их преждевременному износу. Это объясняется
тем, что регулирование сравнительно медленного контура скорости осуществляется через быстрый в управлении двигатель. Современные цифроаналоговые автоматы тяги позволяют уменьшить число воздействий на
двигатели и повысить качество управления скоростью.
395
ВСС
ВСУП
Узаа
Мзад
Уш1^
МкЗ
V
СВС
М^
Рис. 11.14. Функциональная схема цифроаналогового автомата
тяги
брз!
БВУТ Ш&. сп8пэ ^? РУД
==*>
РЭД
б"*!?
П
ииг
**
$
Г
В цифроаналоговом АТ (рис. 11.14) управление может вестись в различных режимах: в крейсерском полете-по сигналам навигационного вычислителя-вычислительной системы самолетовождения ВСС. При этом реализуются режимы стабилизации и управления скоростью или числом М полета, вертикальной навигации, стабилизации и управления вертикальной
скоростью, выхода на заданный эшелон.
При заходе на посадку, посадке, а также в крейсерском полете при
отказе вычислительной системы самолетовождения управление ведется по
сигналам вычислительной системы управления полетом ВСУП. При этом
этом реализуются режимы стабилизации и управления скоростью или
числом М полета, ухода на 2-й круг и «сброс газа». Сигналы, пропорциональные заданным значениям скорости и числа М, подаются из ВСС
и ВСУП в вычислительный блок управления тягой БВУТ в виде последовательного биполярного кода.
В качестве датчиков текущих значений пилотажных параметров используются цифровая система воздушных сигналов СВС и инерциальная навигационная система ИНС. Эти системы выдают в БВУТ сигналы, пропорциональные текущим значениям скорости, числа М, перегрузки п х , углов
тангажа и крена. Кроме того, автомат тяги имеет собственный режим
стабилизации числа оборотов 2-й ступени компрессора. Информация о текущих оборотах 2-й ступени К 2 поступает с электронного регулятора
двигателей РЭД.
Стабилизация и управление скоростью или числом М осуществляется
путем определения рассогласования между текущими и требуемыми значениями этих параметров и вычисления потребного количества оборотов
компрессора высокого давления К 2 . Воздействие на двигатель осуществляется через два контура: грубый-аналоговый и точный-цифровой. Первый контур реализует воздействие через аналоговый сервопривод СЯ6РУД на
рычаги управления двигателями и электронный регулятор двигателя. Этот
контур не позволяет с большой точностью выставить заданное число
оборотов. Поэтому применяется цифровой корректирующий контур с непосредственным воздействием на РЭД, т. е. АТ сначала по грубому каналу
перемещает РУД, а затем по точному каналу корректирует управление.
Таким образом, контур управления через РУД является внешним и замы396
кается через двигатели и динамику самолета, а контур управления через
РЭД-внутренний и замыкается только через двигатели.
Аналоговый сервопривод АТ состоит из электронного блока управления
привода регулирования тяги (БУПРТ) и электромеханического регулятора
тяги (МРТ). Кроме перечисленных сигналов БВУТ получает разовые
команды с концевых выключателей двигателей («Малый газ» и «Взлетный
газ»), с концевиков секторов газа, от стоп-кранов перекрытия топлива
и концевых выключателей шасси.
11.3.2. Моделирование управления скоростью
Рассмотрим модель продольного движения самолета по первичным
параметрам (3.3). Дополним ее уравнением состояния двигателей, уравнениями выхода, входа и законом управления АТ:
*п! Ш = АП1 хп1 (I) + В*П1 ч*! (I),
(11.37)
Уп1(<) = хп1(г),
(11.38)
и & г М - Д б АТ
РУД
рДб^д^В^шМО
Дшг(1)
Да (1)
где хл1 (I) = Ди(1)
у
, в п1 =
(11.39)
/
V
0
аИг,Иг
&о>г,а
0
0
аа,»,
^а,а
0
0
0
0
(11.40)
'«дЮ,
ДУ(1)
0
Ч»,
0
Др(1)
ар,8РУД_
0
ау,а
0
аШ1,у аИ1,р~
аа,у аа,р
0
0
ау,„ ау.у
0
0
ау,Р
а
р, р
АТ -_ — \.Кд > АТ
п!
°ш_ =п-и Па ^
— - — По .
у
ДУ
П
Получим вектор передаточных функций системы «самолет -двигатель АТ» по первичным параметрам продольного движения на управляющее
воздействие по скорости
(Р)
= № - АП1
Переходная матрица состояния по первичным параметрам продольного
движения самолета при включенном АТ
= [Р1 - АП1 - В*1 ВА1Т ] - 1 = (фА1Т) -: •
Определим матрицу ФА?(р):
(ФА1Т(Р)}ПР
|ФП1 Т (Р)1
где {ф*!Т(р)}пр-присоединенная матрица.
397
Определитель матрицы
р-
О
Р - а«,а
о
1ФП!Т(Р)| =
0
О
Р
-а,-0) ,р
г
-аа,у
О
-а,о,р
| — Зу, у
—ау, Р
О
(11.41)
0
Анализ определителя (11.41) показывает, что он имеет шестой порядок
полинома по степеням р. Дальнейшие преобразования носят алгебраический характер и не представляют сложностей. Условия устойчивости
получаются по критерию Рауса - Гурвица. Реакция на ступенчатое управляющее воздействие ДУзад(р) = АУ зад /р определяется аналогично реакции
на такое воздействие самолета, управляемого САУу . Отсутствие статической ошибки обеспечивается интегральной составляющей управления.
Глава 1 2
УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ
НА ВЗЛЕТЕ И ПРИ ПОСАДКЕ
Взлет самолета - процесс неустановившегося движения, начиная с момента старта и кончая установлением нормальной полетной конфигурации
и номинального режима работы двигателей.
Взлет так же, как и посадка, является самым напряженным и ответственным этапом полета. Это объясняется скоротечностью процессов управления и дефицитом времени для выработки и реализации управляющих
воздействий, необходимостью создания значительных управляющих воздействий в условиях возрастающей скорости движения и близости земли,
наличием больших возмущающих воздействий вследствие изменения конфигурации самолета и режима работы двигателей, ограниченностью располагаемых дистанций разбега, продолженного и прерванного взлета. Относительная частота летных происшествий на этапе взлета значительно
превышает частоту происшествий на маршруте. Во многом безопасность
взлета и регулярность полетов зависят и от метеоусловий: плохой видимости, сильного бокового ветра, а также состояний взлетно-посадочной
полосы.
Для снижения неблагоприятного воздействия всех вышеперечисленных
факторов ставится задача автоматизации управления взлетом с помощью
систем директорного и автоматического управления взлетом.
Этап автоматического выравнивания следует за этапом автоматического захода на посадку. При выравнивании задается определенная
траектория полета самолета, обеспечивающая постепенное по мере прибли398
жения к земле уменьшение вертикальной скорости снижения самолета от
скорости, соответствующей планированию по глиссаде, до заданной посадочной вертикальной скорости.
Автоматическое выравнивание может производиться по «жестким» или
«свободным» траекториям. Предпочтение отдается «свободным» в связи
с тем, что время выравнивания соизмеримо с временем переходного
процесса стабилизации самолета на заданной траектории. Это приводит
к тому, что все возмущения или начальные отклонения, «уводящие»
самолет с заданной траектории, не могут быть парированы за время
процесса выравнивания, увеличивая и без того значительные погрешности
системы в силу изменения параметров полета из-за нестационарности
режима. Кроме того, при необходимости возвращения самолета на «жесткую» траекторию выравнивания после случайного от нее отклонения может
потребоваться чрезмерное увеличение или уменьшение пилотажных параметров (особенно угла атаки), которые в этом режиме должны находиться
в достаточно узких пределах.
Поэтому «свободные» траектории, основанные на реализации функции
заданной вертикальной скорости от высоты полета с повышенным быстродействием, положены в основу принципа действия систем автоматического
управления выравниванием. В качестве управляющей координаты при этом
может использоваться как угол тангажа, так и вертикальная перегрузка. Но
так как в момент приземления необходимо особенно внимательно контролировать угол тангажа, чтобы исключить посадку на переднюю стойку
шасси, предпочтение в качестве координаты управления отдается углу
тангажа.
Автоматизация этапа выравнивания является необходимым условием
автоматизации посадки самолета по категории Ша ИКАО.
Уход самолета на второй круг-процесс неустановившегося движения,
начиная с момента принятия пилотом решения об уходе и кончая набором
безопасной высоты с установлением нормальной полетной конфигурации
и номинального режима работы двигателей.
Основными причинами ухода на второй круг являются: отсутствие
у пилота надежного визуального контакта с ВПП или огнями приближения
на высоте принятия решения, обнаружение пилотом значительных траекторных отклонений по курсу и глиссаде, не позволяющих продолжать
посадку.
В ручном режиме управления самолетом пилот должен переставить
РУД в положения, соответствующие взлетному режиму и отклонить рули
высоты вверх взятием колонки штурвала «на себя». Если ограничиться
перестановкой РУД и осуществить уход с «закрепленными» рулями высоты, то траектория самолета будет слишком пологой и большая часть
энергии двигателей будет расходоваться на разгон самолета, а не набор
высоты. Поэтому применяется комбинированный способ управления как
через двигатели, так и через рули высоты.
Жесткие требования по безопасности и точности управления самолетом
при уходе на второй круг предопределили использование автоматики для
решения этой задачи.
399
12.1. ДИРЕКТОРНОЕ И АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ВЗЛЕТОМ
Общая характеристика взлета. Процесс взлета включает разбег, отрыв
самолета от земли и набор безопасной высоты (рис. 12.1).
На этапе разбега I происходит разгон самолета с прижатым к ВПП
носовым колесом при сохранении постоянного положения самолета по
отношению к набегающему воздушному потоку вплоть до достижения
скорости, при которой самолет сможет оторваться от земли. Разбег
начинается с того, что пилот плавным движением РУД переводит двигатели на взлетный режим и отпускает тормоза колес. Основной задачей
пилота или автоматики на этом этапе является выдерживание равноускоренного движения самолета по ВПП и стабилизация самолета на
осевой линии ВПП.
Этап II отрыва носового колеса от ВПП начинается с момента достижения самолетом скорости отрыва Ук и заканчивается отрывом основных
стоек шасси от ВПП. При этом пилот плавным непрерывным движением
колонки штурвала «на себя» отклоняет рули высоты вверх, увеличивая
углы атаки и тангажа самолета за счет превышения подъемной силы над
силой тяжести. Происходит интенсивное вращение самолета вокруг поперечной оси в сторону кабрирования. Скорость и значение отклонения рулей
высоты не должны быть слишком большими, чтобы предотвратить выход
самолета на повышенные углы атаки и касание ВПП хвостовой частью
фюзеляжа. Однако малые величина и скорость отклонения рулей высоты
также недопустимы вследствие чрезмерного роста скорости движения
самолета по ВПП и увеличения длины пробега.
Этап III набора минимальной высоты 10,7 м (по нормам ИКАО)
начинается в момент отрыва самолета от ВПП. Этот этап может начинаться и от момента поднятия носового колеса, если перевод самолета на
взлетный угол атаки производится сразу же без выдерживания в положении
«на двух точках». При этом самолет должен иметь скорость, превышающую скорость Ук на 15-20%.
ш
400м
120 М
Е
И
ЗОМ
10,7М
1-впл
1-6м
400
Рис. 12.1. Траектория и этапы взлета
самолета
Этап IV набора высоты начинается с высоты 10,7 м и заканчивается на
высоте 30 м. За это время скорость продолжает расти, убирается шасси,
переставляется стабилизатор в новое балансировочное положение.
Этап V набора высоты начинается с момента уборки шасси и заканчивается на высоте 120 м. За это время скорость самолета возрастает до
значения, необходимого для начала уборки закрылков. При этом должен
выдерживаться режим изменения скорости, угла наклона траектории и вертикальной скорости из условия комфорта пассажиров.
Этап VI набора высоты начинается с момента достижения скорости, при
которой можно убирать закрылки и предкрылки. Стабилизатор устанавливается в полетное балансировочное положение, двигатели переводятся на
номинальный режим работы.
В процессе разбега пилот при необходимости может прекратить взлет
вследствие отказа двигателя. Для предотвращения выкатывания самолета
за пределы ВПП производится экстренное торможение реверсированием
тяги, тормозами колес и выпуском интерцепторов. Максимальная скорость
на разбеге, при которой пилот может принять решение о прекращении
взлета, называется критической скоростью принятия решения. Если пилот
обнаруживает отказ двигателя на скорости больше критической, то взлет
может быть только продолжен.
Параметры этапов и траектории взлета в значительной мере зависят от
взлетных характеристик самолета и конкретных условий взлета. Особенно
сильно влияют взлетная масса самолета, режим и число работающих
двигателей, температура и давление на аэродроме, положение механизации,
скорость и направление ветра, состояние и уклон ВПП.
При рассмотрении бокового, движения самолета при взлете целесообразно выделить два этапа: разбег до скорости отрыва самолета от ВПП
и воздушный участок взлета до высоты 400 м.
Задача экипажа в управлении боковым движением взлета заключается
в удерживании самолета на оси ВПП либо путем воздействия на переднее
колесо (при малой скорости) и на руль направления, кинематически
связанным с рулевым колесом (при возросшей скорости), либо раздельным
подтормаживанием колес основных стоек шасси. Пилот должен парировать
внешние возмущения, действующие на самолет и не допустить выкатывания самолета за пределы ВПП. Такими внешними возмущениями являются
боковой ветер, асимметрия тяги двигателей, асимметрия сил сопротивления качению колес и т. д.
При управлении боковым движением самолета на воздушном участке
взлета необходимо стабилизировать путевой угол самолета, воздействуя на
рули направления или элероны и не допуская значительных кренов.
Принцип действия систем директорного и автоматического управления
продольным траекторным движением при взлете. Управление продольным
траекторным движением самолета при взлете производится пилотом визуально по наземным ориентирам и приборам. Наблюдая за ростом
скорости движения самолета по ВПП по указателю скорости, пилот
в нужный момент воздействует на колонку штурвала и отклоняет рули
высоты таким образом, чтобы перевести самолет на кабрирование. Затем
401
Параметры
1 бзлета
Рис. 12.2. Функциональная схема
индикатора взлета
выдерживается требуемая траектория взлета с плавным увеличением скорости. Системы директорного и автоматического управления продольным
взлетом служат для облегчения пилоту решения этой задачи.
Индикатор взлета (ИВ) обеспечивает автоматизацию этапов разбега
и начала отрыва самолета от ВПП путем выдачи пилоту командного
сигнала на подъем переднего колеса, если самолет достиг расчетной
скорости, и командного сигнала на прекращение взлета, если самолет не
сможет закончить разбег в пределах ВПП.
Свои командные сигналы ИВ выдает на табло «Подъем переднего
колеса» и «Взлет запрещен» или соответствующие электронные индикаторы. Формирование сигнала стра,р на разрешение взлета происходит
в соответствии со следующей логикой:
ОЛЯШ
з^^
О, У(1)<У„
(12.1)
где текущее значение скорости У(1) определяется однократным интегрированием
I
продольной составляющей ускорения самолета У(1) = |ах(1т.
о
Формирование сигнала на запрещение взлета производится в зависимости от пройденного самолетом по ВПП расстояния Ь({):
О,
(12.2)
Текущее значение пройденного расстояния Ь(1) определяется двукратным
интегрированием продольной составляющей ускорения самолета
Заданное значение пройденного расстояния Ь(1) предварительно получается решением системы уравнений продольного движения самолета при
взлете. Кроме того, сигнал на запрещение взлета может быть выдан и до
достижения критического значения параметра разбега в случае отказа
одного из двигателей. При этом проверяется условие достаточности для
торможения остатка ВПП, чтобы самолет не выкатился за торец концевой
полосы безопасности. Если же остатка ВПП недостаточно, а скорость
самолета позволяет продолжить и закончить разбег, то сигнал запрета не
выдается.
402
В состав индикатора взлета (рис. 12.2) входят датчик продольного
линейного ускорения-инерциальная навигационная система И НС, датчик
воздушной скорости - система воздушных сигналов СВС, пульт ввода
параметров взлета ПВ, вычислитель индикатора взлета ВВ и система
электронной индикации СЭИ.
В постоянной памяти вычислителя хранятся аэродинамические параметры самолета, параметры двигателей, шасси и т. д. Кроме того, в памяти
имеются количественные характеристики ВПП: ее длина, уклон, вид покрытия. С пульта ввода параметров взлета перед полетом вводятся в вычисли-:
тель взлетная масса, температура и давление воздуха, параметры ветра,
состояние поверхности ВПП. На основании этой информации вычислитель
рассчитывает заданные значения пройденного расстояния и скорость, при
которой должен быть осуществлен подъем переднего колеса.
В процессе разбега ИНС непрерывно измеряет линейное ускорение
и выдает в вычислитель сигнал а х . Вычислитель однократным интегрированием этого сигнала получает скорость самолета, а двукратным интегрированием-пройденное расстояние. Сравнивая текущие значения пройденного расстояния с заданными значениями в каждый момент времени,'
вычислитель определяет возможность и целесообразность продолжения
взлета.
Если самолет по каким-либо причинам набирает скорость слишком
медленно и до конца ВПП не сможет оторваться от ее поверхности, то
вычислитель выдает на электронный индикатор сигнал «Взлет запрещен».
Если пройденное самолетом в процессе разбега расстояние превышает
минимально необходимое, вычислитель приступает к решению второй
задачи. Измеренное системой СВС значение воздушной скорости V поступает на вычислитель, который одновременно рассчитывает скорость интегрированием продольного ускорения. На основе этих двух значений скорости вырабатывается сглаженное значение, которое сравнивается с заданной скоростью У к . Как только V = У к , вычислитель выдает на электронный индикатор сигнал «Подъем переднего колеса».
Система директорного управления продольным движением при взлете
обеспечивает автоматизацию управления самолетом на этапах разбега,
отрыва самолета от ВПП и набора высоты путем выдачи пилоту сигнала
в виде отклонения командной стрелки при достижении скоростью самолета
заданного значения и при отклонении текущего значения угла тангажа от
заданного.
Выработка сигналов на запрещение взлета и на подъем переднего колеса
осуществляется так же, как в индикаторе взлета. Закон управления командной стрелкой на воздушном этапе взлета формируется следующим образом:
ст^ДУ = к ар1 («-« зад ),
озад = 1)МД(У, 8за1[,ф),
(12.3)
СДУ
„
„
^ттчг
I
где а н
-отклонение продольной командной стрелки по сигналу СДУ; Ка„~
передаточный коэффициент по отклонению продольной командной стрелки;
и
зад(^> ^за* > ф)~ заданное значение угла тангажа как функция скорости движения
самолета, положения закрылков и стабилизатора.
403
П
бзп"т™\ь<
Функциональная схема СДУ представлена на рис. 12.3. В состав системы
входят пульт ввода параметров взлета
ПВ, инерциальная система ИНС, система воздушных сигналов СВС, датчик
положения закрылков ДПЗ, датчик положения стабилизатора ДПС, вычислитель взлета ВВ и система электронной
индикации СЭИ.
Система работает следующим образом. После достижения самолетом скоРис. 12.3. Функциональная схема рости У к , вычислитель взлета вырабасистемы директорного управления тывает скачкообразный сигнал, соответпродольным движением при взлете ствующий заданному значению угла
тангажа на кабрирование. Этот сигнал
СДУ
вызывает отклонение командной стрелки индикатора вверх. Пилот
выполняет команду, плавно отклоняя колонку штурвала «на себя». Самолет начинает поднимать нос и изменяет угол тангажа. Сигнал о с ИНС
компенсирует в вычислителе скачкообразный сигнал и зад . В результате
СДУ
сигнал ст„
постепенно уменьшается, а командная стрелка индикатора
возвращается в нейтральное положение. Пилот выполняет команду, плавно
возвращая колонку штурвала «от себя».
Дальнейшее управление командной стрелкой ведется в функции отклонения текущей воздушной скорости полета от заданной, которая определяется положением закрылков и стабилизатора. Если текущая воздушная
скорость самолета отличается от заданной, то вычислитель формирует
командный сигнал на индикатор. Пилот выполняет команду и отклонением
рулей высоты устраняет рассогласование.
Система автоматического управления продольным движением при взлете обеспечивает управление самолетом на всех этапах взлета путем
отклонения рулей высоты при достижении скоростью самолета заданного
значения с последующим выдерживанием заданного значения угла тангажа,
определяемого воздушной скоростью и положением механизации крыла
и стабилизатора.
Закон управления рулями высоты на воздушном этапе взлета формируется следующим образом:
= ки со2
„ (Аи - Аи з
Ау зад = к ъ у [V - Узад (5зак , ср)] . (12.4)
Функциональная схема САУ продольным взлетом аналогична схеме
СДУ (см. рис. 12.2). Отличие заключается в том, что вычислитель
АУ
ВВ формирует управляющий сигнал а,
на сервопривод рулей высоты СЯ6„.
В момент достижения самолетом скорости Ук вычислитель выдает
управляющий сигнал СТВАУ на сервопривод, который отклоняет рули высоты. Самолет изменяет угол тангажа и угол атаки и отрывается от ВПП.
404
Рули возвращаются в балансировочное положение и дальнейшая их автоматическая отработка происходит при отклонении текущей скорости полета от заданной.
Принцип действия систем дирек горного и автоматического управления
боковым траекторным движением при взлете. Управление боковым траекторным движением самолета при взлете производится пилотом визуально
по наземным ориентирам и приборам. На наземном этапе взлета пилот,
наблюдая за положением самолета относительно оси ВПП, воздействует на
педали, чтобы самолет выдерживал прямолинейную траекторию разбега.
На воздушном этапе взлета пилот воздействием на педали и штурвал
выдерживает курс ВПП в пределах ограниченных углов крена. Системы
директорного и автоматического управления служат для облегчения пилоту
решения этой задачи.
Система директорного управления боковым движением при взлете обеспечивает автоматизацию управления самолетом на этапах разбега, отрыва
самолета от ВПП и набора высоты путем выдачи пилоту сигнала в виде
отклонения командной стрелки при отклонении самолета от осевой линии
ВПП.
Закон управления командной стрелкой на наземном этапе взлета имеет
вид:
СДУ
ст,
где
СДУ
стг
= кет [кр.к ек + Ц, Д\|/к],
А\|/к = \|/к - у,,™,
(12.5)
- отклонение боковой командной стрелки по сигналу СДУ; к„г - переда-
точный коэффициент по отклонению боковой командной стрелки; е к - угловое отклонение самолета от равносигнальной линии курса; Д\|»к - отклонение текущего курса
самолета от курса ВПП; ке> ,1ц, - передаточные коэффициенты.
Функциональная схема СДУ (рис. 12.4) включает пульт ввода параметров взлета ПВ, курсовой радиоприемник КРП, инерциальную систему
ИНС, вычислитель взлета ВВ и систему электронной индикации СЭИ.
Система работает следующим образом. При отклонении самолета от
осевой линии ВПП вычислитель ВВ по сигналам ек и А\|/к формирует
СДУ
„
_
_
командный сигнал ст2 на отклонение командной стрелки вбок. Пилот
выполняет команду, плавно отжимая педали. Под действием рулей направления и повернутого носового колеса
Парамеяц. ы
самолет меняет свое положение относибзлета
ПВ
тельно оси ВПП. Рассогласования е„ и
А\|/к уменьшаются и командная стрелка
€
>
КРП
возвращается в центр прибора. Пилот
*. Г1М
ВВ
выполняет команду, возвращая педали
Ун ^
в нейтральное положение.
Пх
ИНС
На воздушном участке взлета сигнал
Г ^
ек быстро пропадает и основным сигналом, управляющим движением команд- ?ис 12Д фун]сциональная схема
ной стрелки, становится сигнал Д\|/ к . системы директорного управления
Удерживание командной стрелки в цент- боковым движением при взлете
405
х
Т
ре прибора возможно теперь не только воздействием на педали, но и на
баранку штурвала в пределах ограниченного угла крена.
Система автоматического управления боковым движением при взлете
обеспечивает управление самолетом путем воздействия на рули направления при отклонении самолета от осевой линии ВПП на наземном этапе
взлета и путем воздействия на рули направления и элероны при отклонении
самолета от курса ВПП или при достижении предельных углов крена на
воздушном этапе взлета.
Закон управления рулями направления на наземном этапе взлета формируется следующим образом:
§н АУ = Ц юу + кб1 Е, + Ц Д\ук ,
Ду|/к = ч/к - \|/8ПП .
(12.6)
На воздушном этапе взлета управление ведется как через канал рулей
направления, так и через канал элеронов:
(12.7)
(12.8)
Функциональная схема САУ аналогична схеме СДУ (см. рис. 12.4).
Отличие заключается в том, что вычислитель ВВ формирует управляющие
сигналы 5н АУ и 8э ЛУ на сервопривод рулей направления СЯ5Н и элеронов
Особенности законов управления. Формирование сигнала на запрещение
взлета стзапр может производиться в зависимости от достигнутой скорости
в функции пройденного расстояния:
О, У(.)>У (1 );
*
;
или в зависимости от достигнутого ускорения в функции пройденного
расстояния или времени:
О, ах(1)>а*(1);
где У*(1), а* (I)- требуемые значения соответственно скорости и ускорения.
Сравнение текущих и заданных значений параметров взлета может
производиться как непрерывно в течение разбега, так и дискретно в одной
или нескольких контрольных точках. Использование дискретного сравнения, правда, приводит к существенному запаздыванию выдачи сигнала на
запрещение разбега.
Заданные значения В*(1), У*(1) и а*(1) выбирают с учетом инерционности пилота и требуемого соотношения между числом ложных срабатываний сигналов запрета и несрабатываний индикатора.
Общим недостатком ИВ, основанного на принципе сравнения пройденного расстояния или достигнутой скорости с заданными значениями,
является значительное запаздывание в реагировании на изменение условий
разбега. Это объясняется тем, что при опасном падении ускорения потре406
буется достаточно продолжительное время для интегрирования этого
изменения. Особенно это характерно для случая, если до момента начала
падения ускорения запас по скорости или пути был значительным.
Индикаторы, основанные на принципе сравнения текущего и заданного
ускорений, позволяют фиксировать момент опасного падения ускорения
практически мгновенно. Однако не всегда кратковременное падение ускорения, вызванное, например, наездом самолета на заснеженный участок
ВПП, должно рассматриваться как достаточное основание для запрета
взлета, так как имеющийся к этому моменту запас скорости может
оказаться вполне достаточным для завершения взлета.
В связи со скоротечностью этапа разбега к индикаторам взлета предъявляют очень жесткие требования по быстродействию и запаздыванию
в выдаче сигнала запрета. При этом необходимо учитывать и запаздывание
пилота, который мгновенно не может выполнить команду на запрещение
взлета. Поэтому в некоторых индикаторах взлета применяется процедура
«предвычисления» значений пройденного пути или скорости по их текущим
значениям, что позволяет прогнозировать развитие процессов управления
разбегом на несколько секунд вперед и снизить запаздывание в выдаче
сигнала запрета.
В СДУ взлетом для фильтрации высокочастотных помех и устранения.
колебаний командной стрелки в цепи командного сигнала устанавливают
апериодический фильтр с небольшой постоянной времени Тф = 1 -4- 1,5 с.
Чтобы избежать значительных отклонений командной стрелки при отказах
системы, используют ограничение по командному сигналу Рстж с линейной
зоной, если разность (о — изад ) находится в заданных пределах, и зоной
насыщения, если разность (Ъ — иэад ) велика:
С» - о«и(У,8»д,ф)].
(12.11)'
Для обеспечения астатизма в цепи командного сигнала устанавливается
изодромное звено с большой постоянной времени Т„ = 10 -н 15с:
На воздушном участке взлета помимо сигнала разности между текущим;
и заданным значениями угла тангажа для управления командной стрелкой;
используется сигнал разности между значениями текущей и заданной
приборной скорости, а также сигнал производной V. Так как надежного
датчика сигнала V на борту самолета нет, его получают путем дифференцирования сигнала V с постоянной времени XV , что обеспечивает фильтрацию помех в производной.
г
Для фильтрации высокочастотных помех, обусловленных турбулентностью воздуха, используется апериодический фильтр с постоянной време407
ни Ту = 1,5 -=- 2 с. Тогда закон управления СДУ взлетом принимает следующий вид:
I.
Г„р+ 1
1с,-,
11
(12.13)
Для обеспечения возможности плавного переключения директорного
и автоматического управления продольным взлетом формирование заданного значения угла тангажа для того и другого режима осуществляется по
одним и тем же цепям.
Для того чтобы осуществить управление командной стрелкой не по
угловому, а по линейному отклонению, необходимо учесть расстояние
В4рм между самолетом и КРМ, так как
2
1
Е
е
= Окрм ё к = Окрм к •
Величина Вкрм определяется двойным интегрированием продольного
ускорения самолета:
где О0- расстояние от точки старта самолета до КРМ.
Для демпфирования движения самолета относительно оси ВПП необходим сигнал скорости линейного отклонения
(
2 = У5т(у к -\|/ в п п )^ УДу,
где V = |ах(1т.
о
Для демпфирования угловых колебаний самолета по курсу сигнал
Ац/ = (\|/к — \|/впп ) пропускается через изодромное звено с постоянной
времени ТДф . Для компенсации действия на самолет бокового ветра в закон
управления вводится сигнал, пропорциональный скорости бокового ветра
\У 2 . Тогда закон управления СДУ принимает вид
1с.
(12.14)
Этот закон управления используется на этапе разбега. После отрыва от
ВПП самолет быстро выходит из зоны действия КРМ и использовать
сигнал, пропорциональный ек, на воздушном участке взлета не представляется возможным. Поэтому этот сигнал отключается. Для предотвращения возникновения предельных кренов в закон управления вводится сигнал,
пропорциональный углу крена.
408
12.2. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОСАДКОЙ
Общая характеристика выравнивания. Скорость управления самолетом
на заключительной фазе посадки определяется в основном тем, что касание
ВПП должно происходить при незначительных отклонениях от заданной
точки приземления. Так, точка приземления на ВПП должна лежать
в пределах 150-500 м от места расположения ГРМ, боковое отклонение от
курсовой линии не должно превышать ± 8,2 м, угол тангажа должен быть
меньше 8°, угол крена-меньше 3°, вертикальная скорость не должна
превышать (0,6 + 0,2) м/с.
В процессе снижения по глиссаде самолет имеет довольно высокую
скорость планирования, которая по существующим нормам должна
превышать скорость срыва не менее чем в 1,3 раза. Так как устойчивость
и управляемость самолета на заключительной фазе посадки во многом
обусловлены скоростью планирования, то это приводит к существенному
завышению скорости, что в свою очередь является причиной больших
вертикальных скоростей снижения по глиссаде, достигающих 3-4 м/с.
Естественно, что соприкосновение самолета с землей при такой вертикальной скорости недопустимо.
Необходимое уменьшение вертикальной скорости может быть достигнуто за счет уменьшения угла наклона траектории движения самолета.
Этап полета, в процессе которого самолет, двигаясь по криволинейной
траектории, переходит от снижения по глиссаде на траекторию с малым
углом наклона к земной поверхности, называется выравниванием (рис. 12.5).
При посадке самолета вручную выравнивание обычно заканчивается
переводом самолета на траекторию, параллельную земле. На этом этапе
посадки, называемом выдерживанием, самолет летит на высоте 0,5-1 м над
землей, постепенно теряя скорость. К концу выдерживания скорость
самолета близка к скорости приземления. Для поддержания подъемной
силы, уменьшающейся вследствие потери скорости, пилот постепенно
увеличивает угол атаки самолета.
Когда скорость самолета становится близкой к скорости приземления,
пилот перестает увеличивать угол атаки. Поскольку скорость самолета
продолжает уменьшаться, равенство подъемной силы силе тяжести самолета нарушается и самолет начинает двигаться по криволинейной траектории
Парашютиробание
Рис. 12.5. Траектория движения самолета и этапы посадки
409
к земле. Этот этап посадки, называемый парашютированием, заканчивается приземлением самолета.
После соприкосновения самолета с землей начинается заключительный
этап посадки-пробег, в процессе которого скорость самолета уменьшается
до нуля. Управление самолетом на заключительной фазе посадки должно
вестись таким образом, чтобы минимизировать посадочную дистанцию горизонтальное расстояние между точкой, над которой высота полета
.составляет 15 м, и точкой полной остановки самолета после пробега. При
неизменной скорости в начале посадочной дистанции сокращение этой
дистанции может быть достигнуто в основном за счет уменьшения
участков выдерживания и пробега. Так как при пробеге по земле самолет
тормозится более эффективно, чем в процессе выдерживания, то дистанцию
выдерживания целесообразно сокращать. Этим объясняется имеющаяся
в настоящее время тенденция к уменьшению воздушного участка посадочной дистанции таким образом, что при автоматическом управлении этапы
выдерживания и парашютирования практически отсутствуют. Возможны
два способа реализации траектории выравнивания; по жесткой программе,
.когда траектория формируется по отношению к ВПП с помощью специальных наземных средств (по аналогии с глиссадой), и по гибкой корректируемой программе, когда траектория формируется бортовыми средствами
и жестко с ВПП не связана.
В первом способе бортовые средства должны измерять отклонение
реальной траектории полета от заданной по жесткой программе наземными средствами. Создание таких наземных и бортовых средств - сложная
задача. В то же время при отклонении самолета от траектории выравнивания под действием внешних возмущений устранить это отклонение практически невозможно, так как время переходного процесса стабилизации
самолета на заданной траектории соизмеримо с временем выравнивания.
Поэтому в современных системах посадки самолетов чаще применяется
второй способ реализации траектории выравнивания.
. При наличии информации о текущем положении самолета относительно
некоторой точки на ВПП (высоты полета- и дальности до данной точки)
может быть осуществлено автоматическое управление посадкой самолета
с выводом в заданную точку приземления. Принцип такого управления
состоит в следующем. Если в процессе полета произошло отклонение от
первоначальной траектории выравнивания, дальнейшее снижение самолета
происходит по новой траектории выравнивания.
Таким образом, задача автоматического управления выравниванием
включает в себя выбор способа формирования оптимальной траектории
движения самолета, которая при отсутствии внешних возмущений и расчетных начальных условиях обеспечивает приведение самолета в заданную
точку касания ВПП. Кроме того, необходимо осуществить выбор средств,
обеспечивающих движение самолета по траектории, близкой к расчетной
при разбросе начальных условий и действии внешних возмущений.
В процессе выравнивания самолет движется по криволинейной траектории, сопрягающей глиссаду и прямую, параллельную или имеющую малый
наклон к земной поверхности. Искривление траектории происходит
410
Рис. 12.6. Траектории выравнивания при автоматическом управлении посадкой по
экспоненциальному закону
вследствие действия центростремительной силы, возникающей при увеличении угла атаки. Траекторию самолета при выравнивании можно описать
либо дугой окружности,' либо экспонентой. Параметры траектории выравнивания (высота начала выравнивания, длина выравнивания, радиус
кривизны траектории) зависят от скорости самолета, принятых значений
нормальных перегрузок и угла наклона глиссады.
Большее распространение получили экспоненциальные траектории.
Такая траектория получается, если в каждый момент времени вертикальная
скорость снижения самолета пропорциональна его высоте:
Н = - ТН" или (Тр + 1)Н = 0.
Решение этого дифференциального уравнения имеет вид
где Н0-высота начала выравнивания.
В момент приземления по экспоненте самолет имеет практически
нулевую вертикальную скорость, но расстояние от начала выравнивания до
точки приземления велико. Оно может быть уменьшено, если допустить,
что в момент приземления самолет имеет некоторую вертикальную
скорость Н пр . При движении по экспоненте такую вертикальную скорость
самолет имеет на высоте Н0 = — ТНпр. Следовательно, для того чтобы
самолет приземлился с заданной вертикальной скоростью, асимптота
экспоненты выравнивания должна находиться ниже ВПП на расстоянии
Нас = Н0 (рис. 12.6).
Траектория выравнивания должна быть плавным продолжением
глиссады. Для этого необходимо, чтобы на высоте Н — Нв выполнялось
условие
Н = Уе г л .
(12.15)
Дифференциальное уравнение, описывающее траекторию, имеет вид
-ТН + Н = - Н а
(12.16)
Полагая Н = Н8, подставим (12.16) в (12.15):
411
Т
ГДа
°
Т-
*У
уе гл + нпр
.
(12.17)
Выражение (12.17) дает возможность определить достоянную времени
экспоненты, сопрягающейся с глиссадой, при движении по которой вертикальная скорость самолета в момент приземления равна заданной Н п р .
Несмотря на относительную простоту реализации, экспоненциальные
траектории выравнивания имеют недостаток, заключающийся в значительном разбросе точек приземления по оси ВПП в реальных условиях.
Объясняется это тем, что даже небольшое уменьшение абсолютного значения угла наклона траектории при выравнивании может привести к значительному перелету заданной точки приземления. И, наоборот, увеличение
наклона траекторий в момент касания ВПП сопровождается увеличением
вертикальной скорости приземления, т. е. посадка становится «грубой». На
вид траектории выравнивания существенное влияние оказывает также
разброс начальных условий (V, 6 Г Л , Нв).
Принцип действия систем автоматического управления выравниванием.
Управление продольным траекторным движением самолета при выравнивании производится пилотом визуально и по приборам. Наблюдая за
уменьшением вертикальной скорости по вариометру, за углом тангажа по
указателю авиагоризонта, скоростью полета по указателю скорости и
высотой полета по указателю высотомера, пилот воздействует на колонку
штурвала и отклоняет рули высоты таким образом, чтобы самолет плавно
коснулся ВПП.
Система автоматического управления выравниванием обеспечивает
управление продольным траекторным движением самолета вплоть до
точки приземления на ВПП путем воздействия на рули высоты при
отклонении текущего угла тангажа от заданного. Последний определяется
разностью между текущей и заданной вертикальной скоростью, причем
заданная вертикальная скорость является функцией высоты полета.
Закон управления рулями высоты формируется следующим образом:
САУ
5В
'
= к« юг -! к„ (А о - и„л), А о
Нзад = Н зад (Н, Нв , V,
Н
= к 0 (Н - Нзад),
(12.18)
0 ГЛ , Нпр , Н ас ).
Функциональная схема аналоговой САУ выравниванием представлена
на рис. 12.7. В состав системы входят датчик угловой скорости тангажа
ДУС, датчик угла тангажа-гировертикаль ГВ, датчик истинной высоты - радиовысотомер РВ, датчик линейного ускорения ДЛУ, датчик
скорости ДС, формирователь приращения заданного значения угла тангажа-вычислитель выравнивания ВВ, вычислитель автопилота тангажа
ВАШ и сервопривод руля высоты СЯ5а.
Система работает следующим образом. В режиме автоматического
управления заходом на посадку при прохождении высоты начала выравнивания вычислитель выравнивания начинает формировать приращение
заданного значения угла тангажа Ач з а д по сигналам истинной высоты и н ,
приращения нормальной перегрузки ид„ у , воздушной скорости и у . Этот
412
Рис. 12.7. Функциональная схема системы автоматического управления
выравниванием
лчг
"иг
гв
40
па
лли
лг
Дь
ин
Идпу
КАП^
•*
Ц,
'••
и
00
АУза1^
и*
сигнал поступает на вычислитель автопилота ВАПм и отрабатывается
сервоприводом рулей высоты до тех пор, пока сигнал с гировертикали ГВ
не скомпенсирует его. Изменение угла тангажа вызовет изменение высоты,
перегрузки и скорости, что приведет к уменьшению приращения заданного
угла тангажа. Тогда сервопривод вернет рули высоты в балансировочное
положение. Любое отклонение самолета от заданной вертикальной
скорости снижения пересчитывается в соответствующее приращение
заданного значения угла тангажа и отрабатывается рулями высоты.
Управление боковым траекторным движением при выравнивании
сводится к необходимости стабилизировать продольную ось самолета по
направлению оси ВПП. Положение продольной оси самолета по отношению к оси ВПП на заключительном этапе посадки зависит от многих
факторов: точности управления самолетом при заходе на посадку,
симметричности тяги двигателей и т.д. Однако основным фактором
является воздействие бокового ветра. При отсутствии ветра управление
может быть осуществлено так же, как и в процессе захода на посадку, т. е.
путем стабилизации самолета на равносигнальной линии курса. Обычно
в этом случае отклонение продольной оси самолета от оси ВПП не
превышает 2-3°. Диапазон углов крена при выравнивании также весьма
невелик, но его вполне хватает для автоматизации управления боковым
траекторным движением через канал элеронов САУ.
Однако при наличии бокового ветра продольная ось самолета в момент
начала выравнивания отклонена от вектора путевой скорости У п , направленной вдоль оси ВПП, на угол сноса Рсн = ^У г /У. Естественно, что
в момент приземления угол отклонения продольной оси самолета от
вектора путевой скорости, направленного вдоль оси ВПП, должен быть
максимально близок к нулю для предотвращения выкатывания самолета за
пределы ВПП.
Эта задача может быть решена двумя способами. Первый способ
предполагает использование для этой цели канала рулей направления САУ.
Для этого формируется закон управления, основным управляющим
сигналом которого является сигнал разности между заданным и текущим
курсом. Если на предшествующих режимах канал рулей направления
работал как демпфер рыскания, то закон управления принимает вид
б^Ч^ + Ы^-Ув™).
02.19)
413
Для устранения статических ошибок в законе управления (12.19) может
быть также введен интеграл от разности \|/к — \|/впп.
В результате разворота самолета вокруг вертикальной оси возникают
скольжение (Р = \|/к — \|/впп) и как следствие боковая скорость, вызывающая отклонение самолета от курсовой линии. Так как канал элеронов САУ
в это время стабилизирует самолет в горизонтальной плоскости, самолет
может быть введен в значительный крен для возвращения на ось ВПП, что
весьма опасно на столь малых высотах. Поэтому для предотвращения
негативного действия этих факторов автоматический Доворот самолета на
угол сноса целесообразно проводить непосредственно перед приземлением
на заключительном этапе выравнивания, например по команде с радиовысотомера на высоте 5-7 м. Канал элеронов САУ при этом переводится
из режима стабилизации оси самолета относительно равносигнальной
линии курса в режим стабилизации угла крена:
5^ГАУ = 1чсох + к у у.
(12.20)
Однако отклонение самолета от осевой линии луча КРМ может привести к большим боковым отклонениям от оси ВЦП. Кроме того, для
выполнения доворота необходимы очень быстрые отклонения рулей направления и элеронов, что весьма опасно вблизи поверхности земли,
а выполнение доворота на такой высоте затрудняет пилоту принятие
решения при неудачном маневре.
Существует другой способ компенсации угла сноса при посадке-доворот скольжением. В отличие от уже рассмотренного способа доворот
самолета скольжением производится еще на этапе планирования по
глиссаде, чтобы до начала этапа выравнивания угол сноса самолета был
близок нулю. При таком способе доворота вектор путевой скорости У п
направлен вдоль продольной оси самолета, а вектор воздушной скорости
V отклонен от этой оси на угол сноса. Самолет имеет скольжение, равное
углу сноса, и летит с небольшим креном.. В данном случае канал рулей
направления САУ удерживает продольную ось самолета параллельно оси
ВПП, а канал элеронов обеспечивает стабилизацию самолета на курсовой
линии по сигналам КРМ.
Достоинство этого способа - возможность начать этап выравнивания
с нулевым углом сноса, а также значительный запас времени у пилота на
принятие решения о корректировке маневра в случае его неудачного
автоматического выполнения, так как доворот происходит на сравнительно
•большой высоте. Недостатком способа является необходимость своевременной ликвидации угла крена перед приземлением на этапе выравнивания.
Ранний выход из крена приводит к большим боковым отклонениям от оси
ВПП, поздний выход из крена снижает безопасность посадки.
Особенности законов управления. Для формирования заданного значения
вертикальной скорости Нзад в закон управления (12.18) необходимо
непрерывно вводить информацию о текущей высоте полета и текущей
скорости полета
414
3
=
й 4-Н •
V И глУ+
Нпр
ад = - ~ -
1
-
Значение высоты начала выравнивания Н„ можно ввести дискретно
в момент начала режима выравнивания. Значения асимптоты экспоненты
выравнивания Нас , вертикальной скорости приземления Нпр и угла наклона
глиссады могут храниться в памяти вычислителя выравнивания или
вводиться вручную с помощью соответствующих задатчиков.
Надежного и достаточно точного датчика вертикальной скорости Н,
пригодного для формирования закона управления при выравнивании, на
борту самолета нет. Поэтому для получения этого сигнала дифференцируют сигнал истинной высоты с радиовысотомера. При этом используют
апериодический фильтр с постоянной времени Т„, так как в сигнале
с радиовысотомера присутствуют высокочастотные помехи:
Однако запаздывание сигнала вертикальной скорости при постоянной
времени фильтра Тд = 1 с оказывается соизмеримым с полным временем
выполнения режима выравнивания, что приводит к ухудшению динамических свойств системы.
Для компенсации вносимого запаздывания необходимо использовать
сигнал, который опережал бы по фазе сигнал вертикальной скорости.
Таким сигналом является вертикальное ускорение самолета ау = § пу . Тогда
закон управления (12.22) принимает вид
• Таким образом, сигнал вертикальной скорости получается комплексированием продифференцированного сигнала высоты и сигнала вертикаль2
ной перегрузки. Так как ау ^ р Н, то закон управления (12.23) эквивалентен
следующему закону управления:
т. е. сигнал вертикальной скорости р Н = И получается без динамического
искажения.
Для уменьшения вертикальной скорости используется дополнительный
разомкнутый контур формирования сигнала приращения заданного значения угла тангажа. Этот сигнал формируется в виде интеграла от некоторой
заданной вертикальной скорости. Для повышения устойчивости в этом же
контуре используют сигнал интеграла от продольного ускорения ах . Для
415
повышения быстродействия, что
особенно важно при парировании
горизонтальных порывов ветра и
«сдвигов ветра», в разомкнутом
контуре используют дополнительный сигнал, корректирующий изменение приборной скорости в ре1,0
жиме выравнивания.
Введение регулирования по разомкнутому контуру приближает
траекторию полета самолета к экспоненциальной и снижает вертикальную скорость приземления. В
этом случае замкнутый контур исРис. 12.8. Переходные процессы в репользуется для коррекции прожиме выравнивания
граммной траектории. Это позволяет снизить требование к значениям передаточных коэффициентов контура, уменьшить колебания переходных процессов, повысить устойчивость.
Особенности моделирования. Режим выравнивания представляет собой
криволинейное движение в условиях переменной скорости и довольно
сложного и индивидуального для каждого самолета влияния близости
земли. Поэтому обычные линейные стационарные модели, применяемые
для исследования процессов управления движением самолета, в данном
случае не могут быть использованы. Поэтому для исследорания режима
автоматического выравнивания применяются нестационарные модели
движения с переменными параметрами. Единственным упрощением в этом
случае является возможность раздельного исследования бокового и продольного движений вследствие прямолинейного характера движения с
ограниченными углами крена. Однако апробированный метод «замороженных коэффициентов» для построения модели движения использовать
нельзя.
Переходные процессы в замкнутой системе «самолет-САУ выравниванием» показаны на рис. 12.8. При исследовании замкнутого контура особое
значение приобретает влияние разброса начальных условий в начале
режима на значение посадочной вертикальной скорости Уу пос , продолжительность режима выравнивания до момента приземления Твыр и длину
посадочной дистанции Ь пос . На рис. 12.9 показаны зависимости этих
величин от разброса значений угла наклона траектории 9Н „ и вертикальной
скорости У ун в в момент начала выравнивания. Исследование замкнутого
контура проводится также в случае автоматической посадки в сложных
атмосферных условиях при действии горизонтальных порывов ветра.
Изменения Уу.пос,, о и Ьпос при порывах ветра ступенчатой формы показаны
на рис. 12.10.
Однако управление выравниванием только с помощью руля высоты при
больших начальных отклонениях от траектории, а также при значительных
порывах горизонтального попутного ветра оказывается недостаточно
416
эффективным. Точность выдерживания заданных характеристик автоматической посадки с
применением НУПС приблизительно эквивалентно точности,
полученной с применением ру-2
-5
лей высоты, если разброс началь-2,5
ных условий незначителен. При
0,5
действии порывов горизонтального ветра на высоте, меньшей
высоты начала выравнивания,
управление с помощью НУПС
дает повышение точности автоматической посадки, так как Рис. 12.9. Переходные процессы в режиме
становится существенным запаз- выравнивания при разбросе начальных
дывание, свойственное управле- условий
нию с помощью рулей высоты.
Цифроаналоговые САУ. Автоматическое выравнивание с помощью
цифроаналоговых САУ производится по сигналам продольного и вертикального ускорений ах и ау с БИНС, угла тангажа о с БИНС, приборной
скорости Упри6 с СВС, истинной высоты Ни с РВ, дальности Д и угла
наклона глиссады 9ГЛ с МЬ8 (рис. 12.11). Законы управления рулями
высоты и интерцепторами формирует вычислительный блок управления
полетом (БВУП).
Приращение заданного значения угла тангажа формируется следующим
образом:
Ао з а д = ки Р„ Г
ТиР
1_т и р+ 1
.
р
- Аи"
о - Ац а д -
Н
(12.25)
V
где Д1)зад- сигнал отклонения от экспоненциальной траектории; Дозад-корректирующии сигнал для компенсации горизонтальных порывов ветра, Д 1)зад- форсирующий
программный сигнал для перебалансировки самолета и обеспечения его посадочного
углового положения.
.
зг
го
Рис. 12.10. Переходные процессы в режиме выравнивания при действии порывов горизонтального ветра
I 4 Зак. 948
Р
1
аи
Ну
VI, пос, М/С
-5
П
М1.5
аб
'ъ
--
5ВУП
Ни
ивт
*\ С" В
га
и
5-
Рис. 12.11. Траектория и этапы ухода
самолета на второй круг
417
•1
Сигнал Ао зад формируется как сигнал отклонения от экспоненциальной
траектории, заданной соотношением между истинной высотой и вертикальной скоростью:
Аи" д = к 0 Н Р н (Н и -Кн'У у ).
.
.
(12.26)
Нелинейное преобразование сигнала отклонения от заданной траектории в соответствии с функцией Р„ исключает возможность формирования
сигнала на пикирование. Информацию о вертикальной скорости У у получают комплексированием дифференцированного сигнала истинной высоты
и сигнала вертикального ускорения:
у =
Тнр + 1
I
ТйР+Г
Форсирующий сигнал Аи"а Д вводится, начиная с некоторой фиксированной высоты начала выравнивания Ннв или схода с глиссады Н6г по сигналам
МЬ8:
. пр
Ограничение Р„
1
позволяет избежать чрезмерного возрастания угла
тангажа при затянутых посадках.
у
Для формирования корректирующего сигнала Дозад используется
изменение скорости полета относительно воздушной среды в процессе
выравнивания А У пр , которое сравнивается с изменением скорости относительно земли:
у1*пр
1
(*пр)э«д
у
Т ф р + 1 •""
А \/
АУпр.1,
р
а.
п
(12.27)
V
Нелинейная функция Ру реализуется в зависимости от знака Ао зад
и повышает эффективность парирования горизонтальных порывов ветра.
Программное отклонение руля высоты необходимо для компенсации
пикирующего момента, обусловленного влиянием близости земли.
Через 1 с после обжатия шасси происходит отключение сигнала Аи зад
и подключение сигнала, пропорционального разности заданной и текущей
угловой скорости сог .
Для повышения точности управления в режиме выравнивания формируется сигнал на отклонение органов НУПС
1
418
(Упр - ДУ пр - АУ з а д ) 4- Рв1 Аи" д ]. (12.28)
Этот же сигнал подается в схему формирования Дизад канала рулей
высоты для компенсации моментного воздействия интерцепторов, используемых как органы НУ ПС.
При переводе самолета с этапа выравнивания на послепосадочный
пробег производится автоматический довыпуск передней стойки шасси.
Этот маневр предотвращает возможное отделение самолета от ВПП после
первого касания. Если отделение все же произошло, то автоматически
фиксируется угловое положение самолета, а повторное касание сопровождается плавным опусканием передней стойки. Быстрое опускание
передней стойки позволяет сократить дистанцию пробега за счет более
раннего включения тормозов основных колес.
Боковой канал цифроаналоговой САУ в режиме выравнивания обеспечивает автоматический доворот и компенсацию угла сноса, а также
стабилизирует самолет на ВПП при послепосадочном пробеге. Для этого
используются сигналы у, \|»к и аг с БИНС, а также сигнал ек радиотехнических систем.
12.3. ДИРЕКТОРНОЕ И АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
УХОДОМ НА ВТОРОЙ КРУГ
Общая характеристика ухода на второй круг. Процесс ухода на второй
круг включает в себя этапы продолжения снижения самолета по посадочной
траектории вследствие инерции самолета и набора безопасной высоты.
Траектория и этапы ухода самолета на второй круг представлены на
рис. 12.12.
Начальный этап I ухода начинается на высоте принятия решения
Нпр и заканчивается, когда вертикальная скорость движения самолета
меняет знак. Минимальная высота принятия решения об уходе на второй
круг определяется просадкой самолета, под которой подразумевается
потеря высоты от момента принятия решения об уходе до момента начала
набора высоты. Траектория полета и просадка практически не зависят от
избытка тяги и определяются только создаваемой перегрузкой и начальной
вертикальной скоростью снижения.
Особенно сильно просадка самолета зависит от начальной вертикальной скорости. Так, для самолета Ту-154 при полете по стандартной
глиссаде (—2°40') с рекомендованной скоростью вертикальная скорость
снижения равна — 3,5 м/с. Просадка при уходе на второй круг составляет
8-10 м. При увеличении вертикальной скорости снижения до 5 м/с просадка возрастает до 22 м, при У у = 10 м/с она составит уже 67 м.
В момент принятия решения об уходе на второй круг необходимо
перевести двигатели во взлетный режим, плавно вывести самолет из
снижения отклонением рулей высоты вверх, сохраняя скорость постоянной
до перехода в набор высоты.
Этап II ухода начинается с момента начала набора высоты и заканчивается на высоте 120 м. После появления положительной вертикальной
скорости необходимо убрать шасси и продолжать набор высоты, не
превышая максимальной скорости для данного положения закрылков. При
419
Рис. 12.12. Функциональная схема цифроаналоговой системы автоматического управления выравниванием
400»
ВПП
малых избытках тяги (при отказавшем двигателе) скорость должна сохраняться постоянной, близкой к скорости захода на посадку.
Этап III ухода начинается с момента достижения скорости, при которой
возможна уборка закрылков и заканчивается на безопасной высоте 400 м.
В процессе уборки закрылков скорость постепенно увеличивается, уменьшается угол набора высоты. На безопасной высоте двигатели переводятся
на номинальный режим работы.
Этапы II и III ухода на второй круг почти полностью идентичны этапам
V и VI взлета, что в значительной степени унифицирует законы управления
автоматики в этих режимах.
Принцип действия систем директорного и автоматического управления
уходом на второй круг. Управление продольным траекторным движением
самолета при уходе на второй круг осуществляется пилотом при отсутствии надежной визуальной связи с землей на высоте принятия решения,
неточности вывода самолета на траекторию приземления, невозможности
посадки из-за отказов бортового оборудования или по команде диспетчера
управления воздушным движением. Приняв решение об уходе на второй
круг, пилот должен перевести рукоятки управления двигателями во взлетное положение, вывести самолет из снижения воздействием на рули
высоты, установить полетную конфигурацию механизации крыла и стабилизатора. Системы директорного и автоматического управления уходом на
второй круг, а также автоматы тяги в режиме ухода на второй круг служат
для облегчения пилоту решения этой задачи.
Система директорного управления уходом на второй круг обеспечивает
автоматизацию управления самолетом путем выдачи пилоту сигнала в виде
отклонения командной стрелки в функции разности между текущим и заданным значениями угла тангажа, приборной скорости, положения закрылков и стабилизатора.
Закон управления имеет следующий вид:
ДУ
а^
= 1са (о - изад), озад = С (V - V (6ЗМ, <р)) + «& (5зак, ср). (12.29)
В состав СДУ входят датчик текущего угла тангажа-гировертикаль ГВ,
датчик текущей приборной скорости ДС, датчик положения закрылков
ДПЗ, датчик положения стабилизатора ДПС, формирователь заданного
значения угла тангажа - вычислитель ухода В У, формирователь командного сигнала - вычислитель пилотажно-командного прибора ВПКП и указатель командного сигнала - пилотажно-командный прибор ПКП (рис.
•12.13).
420
Рис. 12.13. Функциональная схема системы директорного управления уходом на второй круг
Система работает следующим образом. При получении команды «Уход
на 2-й круг» вычислитель ухода вырабатывает скачкообразный сигнал 1)^д,
соответствующий заданному значению угла тангажа на кабрирование при
имеющем место положении закрылков и стабилизатора. Сигнал иц сравнивается в вычислителе ВПКП с сигналом текущего угла тангажа IV
Разность этих сигналов преобразуется в отклонение командной стрелки
индикатора вверх. Пилот выполняет команду, плавно отклоняет колонку
штурвала «на себя». По мере выхода самолета на заданный угол тангажа
командная стрелка возвращается вниз и пилот отклоняет колонку штурвала «от себя». Дальнейшее управление командной стрелкой ведется в функции отклонения текущей приборной скорости полета от заданной. При
этом осуществляется коррекция заданных значений угла тангажа и приборной скорости по положению закрылков и стабилизатора.
Система автоматического управления уходом на второй круг обеспечивает управление самолетом путем отклонения рулей высоты в функции
разности между текущим и заданным значениями угла тангажа, приборной
скорости, положения закрылков и стабилизатора.
Закон управления САУ имеет следующий вид:
^ Юг + к„ (Аи - Аи з а д ),
(12.30)
Л«,ад = 1^а д §3ад, ф) + С(У - Узад(5шк, ср)).
Х
Функциональная схема САУ аналогична схеме СДУ (рис. 12.14). Отличие заключается в том, что управляющее воздействие на руль высоты по
сигналу вычислителя ухода формирует автопилот угла тангажа АПо.
При получении команды «Уход на 2-й круг» вычислитель ухода выдает
управляющий сигнал в автопилот, который отрабатывает рули высоты.
Рис. 12.14. Функциональная схема системы автоматического управления
уходом на второй круг
421
В боковом канале САУ осуществляется стабилизация курса. Автомат тяги
с постоянной скоростью переводит рычаги управления двигателями во
взлетное положение.
Особенности законов управления. В системе АБСУ-154 вместо датчика
положения закрылков используются концевые выключатели закрылков,
формирующие разовые команды при достижении закрылками определенных положений. В качестве датчика приборной скорости используется
корректор КЗСП, положение стабилизатора при формировании закона
управления не учитывается. Сигнал приращения заданного значения угла
тангажа вычисляется следующим образом:
1
Гр + 1 4Гр + 1
"
(12.31)
Из сигнала текущей приборной скорости по команде «Уход» вычитается
Умд.1, по команде «Уборка закрылков 45°» вычитается Умд.2, по команде
«Уборка закрылков 28°» -У зад .з. Аналогичным образом происходит формирование заданных значений угла тангажа и^дл, 1^я.2, 1)мД.з- В законе
управления сформированы два изодромных и один апериодический фильтры. Сигнал текущего угла1 тангажа также пропускается через изодромный
фильтр
5„ = кю ш, + № = ~ г » - Ди,аД (- 1 оР ' *
)
(12.32)
Цнфроаналоговые САУ и АТ. Режим ухода на 2-й круг предусмотрен
в вычислительных системах управления полетом ВСУП и тягой ВСУТ. При
формировании законов управления дополнительно учитываются приращения продольной перегрузки, скорость перемещения стабилизатора, количество исправных двигателей. Минимизация просадки обеспечивается
высоким быстродействием. Соблюдаются ограничения по углу атаки и
нормальной перегрузке. Ограничение по приращению продольной перегрузки обеспечивает выдерживание темпа разгона при разном положении
механизации крыла. В боковом канале формируется заданное значение угла
крена для отработки элеронами и рулями направления. При отказе двигателя снимается постоянно действующий внешний момент путем отклонения рулей направления пропорционально интегралу от несимметричности
тяги.
ПРИЛОЖЕНИЕ
ТАБЛИЦЫ ПРЕОБРАЗОВАНИЙ И СОСТАВЛЯЮЩИХ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ДВИЖЕНИЯ САМОЛЕТА
Таблица 1
Связная система координат
н
о
р
м
а
л
ь
н
а
я
с
к
о
ОХ
ОУ
О2
^
ох,
СОВ у СОЗ 1)
вт \|/ вт у —
— соз VI/ зт и соз у
зт \|/ соз у +
+ соз \(/ зт и вт у
о».
зто
— сов и зт у
— соз VI/ зту
°2.
— вт \|/ соз о
сов у вт у —
— вт \|/ вт и соз у
соз у сов у —
— зт \|/ зт и зт у
оха
соз а соз р
— зт а соз Р
зтр
ОУ.
зта
соз а
0
04
— сов а зт Р
— зт а зт Р
созр
охе
сова
— вта
0
ОУ е
сова
— зта
0
0/е
0
0
1
р
о
с
т
н
а
я
п
о
л
У
с
в
я
3
а
н
н
а
я
423
Окончание табл. 1
Связная система координат
—1
н
о
охв
С08 уа С08 Оа
р
м
а
л
ь
н
а
,я
п
о
л
У
с
в
я
3
а
н
н
а
я
ОУ8
81П Оа
— 81П уа СО8 1)а
О2
8Ш У а 81П уа —
8Ш уа СО8 уа 4-
— СОЙ У а 81П 1)а СО8 у а
4- С08 у а 81П Оа 8Ш уа
со8 иа 81П аа
— СО8 у а 81П Уа
СО8 уа 81П у а 4-
С08 Уа С08 у а —
+ 81П Уа 81П иа СО8 уа
— 81П уа 81П 1)а 81П Уа
охе
С08Р
0
-8ШР
ОУ
0
1
0
8Шр
0
СО8Р
е
02е
Нормальная система координат
•
1
п
о
л
У
О2
ОУ
ОХ
оье
ОХ
ОУ
О2
СО8О СО81) СО8у —
сое а 8т 1) —
— сое а соз и сое у —
— 81П О (8Ш у 51П у —
— 81П а СО8 и СО8 у
— 81П а (СО8 у 81П У 4-
— 8Ш 0 С08 у С08 у)
4- 31П и 81П у СО8 у)
с
в
я
3
а
н
н
а
424
ОУе
81П О СО8 О СО8 у —
81ПО 81П1) +
— 81П а 81П у СО8 О —
— СО8 а (8Ш у 81П у —
+ СО8 а СО8 1) СО8 у
— СО8 а (СО8 у 8Ш У 4-
— 8Ш О СО8 у СО8 у)
О2
8Ш 1) СО8 у 8Ш у 4+ 81П у С08 у
4- 81П и 8Ш у СО8 у)
— СО8 0 81П у
СО8 у СО8 у —
— 8Ш 1) 8Ш у 8Ш у
Таблица 2
х„
,
У.
а
а
РХ. = - («Ч + Ср X
а
2
х 8т а° сов р°) 8я
Р у ж = [Су^СОву" + Ср X
х (сов а° сов у° — яп а° х
Р", = [су.81п^ + с р х
х (сов а° 81п у° + вт а° х
х 8т Р° 8ту°)]8я
V
„
РХж = 28я(срсо8а° х
X С08 Р° - Сх )/У°
V
Рх = 8я(ср сока 0 х
М
X С08р°-С х > )
у
РУ( = 28я[ср(со8а° х
X СО8 у° — ЯП а° ЯП Р° X
X С08у°) + Су 81Пу^ +
+ С2>С08у?]/У°
Ру = §я [ср (сов а° х
Р2ж = 8я[ср (вт а° х
X СОв у° — 81П а° вт Р° X
Р Х ж = -т§сове°
РУж = т§8те0
Рх = -срсо8а° х
РУж = 8я(срсо8р°х
х вт Р° 8я
X 81П у ° — С08 а° 81П Р° X
-С2 81Пу°]/У°
•
Оч
От
X ЯПу|;) + С у > С08у"]
Р
Р2/ = 28я[ср(япа° х
X 81Пу°) + С у > С08у°-
М
в
х 8тр°со8у^)]8я
V
М
-
х 8т у° — сов а° вт Р° х
м
о\
•
о-,
X С08у") + Су181Пу^]
—
Р^=-8я(СрС08р°х
х со8 а° 8т у° — сг^ х
х со8 а° вт у° — с2 х
х вт у")
х сову")
Ру° .= 8я[ср(со8а° х
Р2_" = 8я[ср(со8а° х
•
У,
X 81П Р° СО8 у^ — 81П О° X
х 8т р° сов у ° + вт а° х
х 8ту°)-с у _8ту"-
х сову°)-с у 1 8ту^ -
-С2_8ту°]
-с2>сову^]
425
Таблица 3
. .а
а
М у = ту
426
Таблица 5
ку
кх
5,
5
8
Мх '
м
Р У
тх'51
&1 ° °
8
6
М'
Р У
т '51 ° °
2.
%
5»
5
Мх"
м
т
Р У
°
лА
5 н С ] Ро^о
_
_
8.
тхв
8
т а|
»512°
х
т
т
К2
8
Р У
т
_
т
»
_
«Р
_
т
„
м
Му
т
Р У
».81
01 ° °
тП1у
_
М™»
М
К,
_
5
М
К'
м
г
_
_
ф
М
К,
М
«XV
м х а "=-м х °
Р\У
М Х Р "=-М Х Р .
428
Р У
т -ЗЬ ° "
М
- т » 41 ° °
х - х Ь' 2
м
туе
Ф
8
М'
Му*
=
~
Му
Му^ = - Му
р
т
т
т
»ЧЬ
Ь0
г
а
Р
°У°
2
Р У
тгй'ЗЬ
а °
~ °
т
ао
ф
тг
<?Ь Р°У°
т
&0
а
2
мак:=-м«К1
м^: = - 1<
Таблица 6
9
V
а
а
У,а= РХ, ~ РХ, х
Ч*
3
9,а= Ру, ~ Ру] х
х со8 1)° соз а° зт р° х
X СОЗ 9 СО8у°)
X СО8у°/(сО8у° СОЗ 9)
х соз ъ° сое а° зт р° х
х сое у°/(соз у° соз 9)
х сое и0 зт Р° соз 9° х
х созу°
е и Ру"
°
х соей0 зтУДсозЭ0 х
х созу")
- Р6
ч
V
а
—V
—м
У,У= РХ, + Рх,/а
—
9
ау
п
Р
и
м
е
ч
а
н
и
е
а
=Р Р
и
РХ, = Рх.М
р?, = Р».АПт
РХ? = р™/
рМ ,
,У-^/
=
—
рР + рУ. х
а„ =Р г Р +Р1со8р°(соза° зти° — соз и° соз у° з1п а°):
:(созу°соз9°)
ав = Ру' соз а° х
х соз о° сое у°/(соз 9° х
хсозу а °)
р.а
у-,а ,
х — х /^^
и
х
СО5а
рУ
х соз р° (соз а° зт о° —
— сози° сову 0 зта0):
: (соз у^ соз 9°)
"••--й±Г
=
а
Ч.-И.
Р
У
_ Гр" г рТ,х
"Та ~ г. ~ г,
а
х соз а° соз р°/(со8 и0 х
X С08 0° С08 У°/(С08 6° X
X С08у„°)
р° = -Р^/(тУ°соз9°)
Ре =Р у у(тУ°)
0
Р у< = Р у у(тУ )
Р» = -Р^/(тУ°со8в°)
рГ,= -р1/(тУ°с08е°)
рР = _Р г р ДтУ°со89°)
^:^
429
Таблица 7
н
а
Ь
2
<Ч,в = °
а2,а = 0
ан,а=-У0созу«х
2
0
X С08 е°С081)°С08(У -
-Ч/°)/со8а° совр"
о
а Н и = У°со80Р°-
-у°)созе°
Ч,и = °
а2>„ = 0
V
ЗН,У = яп 0°
а1_,у = со8е°со8<Р0
а 2 у = - С 08в°С08 | Р 0
е
У
а м = -Усоз^йпв 0
а
н,е = °
а Н т = у°яп(Ч")' -Ч^совв"
ч*
1=
^Н.Ч
а2е
а
а
ь,г = °
г,у = 0
а цч ,= -У°со89 0 8тЧ' 0
0
= у°8те 0 8тЧ' 0
а 2 Ч / = - У°со8в°со8Ч'1>
Таблица 8
ш
»
«X
а
V
«X
430
,->а
ш„а = М х
а
а
ю„У = Мх
ш,,-.
Ига
а
а
.—.а
у
Шу
«ч,«, =й?
.-.V
у
Р
Ч.Р = Й*Э
гау,а =
М
щу,У =
М
.-.V
а
Шу
0>х
аг,га, = Й у"
а
ш„<о, =
»»
М
Ш
у
Чэ = Й5
Т
Таблица 9
-а
а^
У = туОу
М
= 2туВу/У°
М
Шу'0у
туОу
п
р
и
м
е
ч
а
н
и
е
В
Вг =
431
Т а б л и ц а 11
о
«г
а
и
,а>2 =
7
С08
V
ЯП у°
Г°
<В
"' -
™
сов2»)0 '
х(й>°со8у°-со?8ту 0 )
—
«X
Шу
^
С081)°18и
а
г,ш, = 1
—
а
г,шу = -1§1)0со8у0
а
«,шг = йп'Г0
С08у°
_
аи у = го" сок у° — со" яп у°
Х
X С08у°
^
У
0
1
_
1)
С080
С08«0
1
***
соей0 Х
0
х (совету + ю°со8у°)
Т а б л и ц а 12
0
0
СОВ'б 0081)° С08(У .- \у°
сок а сое
СО8у° СО800 СО81)° [СО81>° СО8С10 8Ш 0° СО8у°_.,,
С05а°С08(3°
I
У
С08УаС08в°
С08у°С059°
(.
х С080Р0 - у0
СО8 а СО8 р"
_9
У
'
'
СО8 а СО8
С08 у° С08 9° 8Ш (Ч*0 - V)»0)
2
С08а° С08Р° С08 1)°
„
*
433
Окончание табл. 12
С05У 0 С05е°С081) 0 , < ? у
М.
п
по
I Vу ~т~ Vу '
С080 С08|30
'
«V —
"'
С08у 0 С08б°8т( > Р 0 -у 0 )
с08а°С08р°
яа.ш.. ж
'.
„о
к
а С081)° С08(Ч"> - ту°)ЙПГ°
/
I -
.
,
1§ и° сое у°
СО8 у° СО8 6° СО8 0° |_р
СО8 |3°
+
С08у а °со89°
X (СО5 (X 81ПI) — СО8 у СО8 у 8Ш О. ) Г4 „ г
0
СО8 V СОЯ 9°
аа
''
С08 а С08
Таблица 13
Р
сог
С089 0 С08у°С08(Ч^
ар Ш
' '
а
С08р°
0080° Г
X С08 у° Р^"
434
„
— 81П у° СО8 Ц
0
-Ч/ 0 )(со8а°со8у 0 8тр 0 _ у
2
1
сову 0
-
/\рО
[
р0
У
' "
ОчГрО
8ту°\
сови^
С080°С08а° .
СО8 0° СО8 а° 81П Р° СО8 у°еуж"] |
СО8 у? С08 9°
* У^ ]
Окончание табл. 13
ак „ =
Р
'
С08У°С08(Ч" ) -У 0 ) Г
С08 Р
г
;
С08 у"
С08р°С08у°
[сое а° сое и° 8т В° Ч
-Р^
+ 18Г°
>'
„
С08 у"
8Ш у
— х
й
С08 0°
С08 и
у
М.
В
_ 0080° 8Шу° С08(Ч<0 - Х|/°)_в
I
^7\
^ V
С08 в° С08 У° С08 (Ч10 — \|/°}Г
.
С081)° I]
С05(<р
аВт =
С08е°С08у°С08(Ч' 0 -\|/ 0 ),
-г
о_х(;о)
„
1187 С08о" вту" + 1§о сову х
Г 1ёе°С080 0
Л
С08У°
"
[сов^0-»)/0)
л
л
8Ш у°
0°
Э111
Г СО8
^\-»;5 V
V
5
0
0
С08Уа
1
. „а ,'° С08 (Ч" - Ч/°) ?1'
2
I
'
/0
С089° 8Ш у° С08(Ч
а в В = сову 0 008(4*° - \|Г)|
р
'^
— СО8 О° СО8 У° 81П О°) Р^"
« _]
0
- \У )С081)°(Ю°Р68У
— ь: +
ЬСОвР
X
С089"
'
0
- (0° 8Ш
-.
СО8у"
+ 81П 7° СО8 О°
г Р!'ж +
I1_соа
те р
Я
х (сое а° вт о° — со8 и° сое у° 81п а°) Р^"
435
Т а б л и ц а 14
Ч*
=
ч»,
8
г "
ае,г, —
-Р
у.
а
а,, Дж = 0
=Р
а
а
У,Гг
У,а„
436
а
е,г, ~
— Ра»
-
Т а б л и ц а 15
*.
У.
^
5
>
8у
рб,
У,
*-^
_8;
,
1
ту
!
•Л
р
П1
у,
т
у,
8
еА
рр
Гх
I*х
-
Гу
-Г
х<
- 1
6
тУ°со89° 2-
1 ^8
_ 6с
V'
х
т -
РГу"
-
РГ"
тУ° у-
1 г
т "'
р
Гж
а
р»
х
-
т
-г
У,
т
1
Р»
*"
т
х>
1
г
у°Ру.
'1
г
уо Р У.
1
а
р*
х
т '
у
'
рРу
«
_ 1 .
р8р
тУ°со 8 9 0 2-
!
-г
у.
Р
8
р у
-6
2
"
_8
р
~
у°Ру.
т
у°Рут
*.-„Л
8
р >
г
тУ°со8в°' 2 '
у,
Р
_
" "
»
р
а
»,
у°Ру-
5г
5р
5,
р
о у.
тУ°
2
-
Р2
-1
г
0
Рг
-~тУ со89° "
ра.
у
-
' РРтУ° у«
-1
гу
тУ°со89° 2«
-'
р«.
2
-
тУ°со8в° 2-
-Р
-
-1
Р
тУ°со89°Р2'
Рг
437
Таблица 16
.-.8,
»М
4А = х
=
Ч»,
'
4,8. =
=°
Ч,», = °
48,
4,8, = - мкгру;
0
438
е,
Окончание табл. 16
=0
=
ч*.
Таблица 17
,-,8,
М
1 ,-,8,
=-М
Му' = — Му'
•'у
439
Окончание табл. 17
т
тг
•'у
Т а б л и ц а 18
а
ар г = сое 6° Р/
РА
Р°
~ ~
а
«,Р, = -
а
440
„
а,Гж = - ру.
Таблица 19
«Р
а
в,а =
ч» = °
_ ,
р
у/а
ауе
=°
а
Чр = °
п
е,р =
а
Р"х = - сЧ,
ж
Р
и
м
е
ч
а
н
и
е
П=-'
д
р; = - <
м
М
м,
М
Т а б л и ц а 20
а
и
V
а
Н,а=-^
2
Ь
Н
а
Ь,а = 0
а
г,а = 0
е
а
н,е = 0
н,„ = ^
а
а
г,и = 0
У
а
ану = 0
а
агу = 0
V
а
а
ь,„ = 0
ь,у = 1
ь
Н
а
ь,е = °
н,у = <>
а
н,„ = 0
а
ь,г = °
ь,у = °
2
а
г,в = °
а
г,у = °
ч,=-у°
441
Т а б л и ц а 21
ю*
а
и
V
»х
шу
V,»,= °
Ч». °
Ч« = °
ч« °
Ч- =Й ^.- М кЛ
Ч» = 0
ч» = °
Ч,и = °
ЧУ
=
"г
=
Ч».= Й««+ М1
=
.-.У , .-,М
ЧУ = °
°
Чл= м к г+ мк« ~
/е
У , еМ,,-.<1
~ (р у„+ Р у,) М к г
«х
а
ш„со, =
шу
<Ч,соу=М?'
р
Ч®, = ™у'
ч»,= °
ЧР=Йу
Ч,з = °
ЧР=Й*
У
ч».= °
- со,
М
У
,—.ш,
х
М
Чт = ° -
Чт = 0
Чт = °
Т а б л и ц а 22
о
«>«
0
«X
442
=
\°>, *
ац,„ = 0
а
и ш
, ,=0
У
V
т,<о, = °
Ч». °
а
а
а
у,о = °
у,и, = !
а
Ж
а
=
С0у
,и = °
У
у,ш, ~ °
о
У
«,ш, = °
Ч», = °
а
а
.,у = °
а у>? = 0
V
а
у,»у = '
4т = °
Таблица 23
а
шг
м, = °
а,тг = !
а
0
V
а
а
а
а
Р,а = °
а,а= -Ру,
а
а,и = °
м
еу рг?
р
а,У = - у, - у,
а
а,9 = °
Р
а
«,ш, = 0
»х
юу
а
М, = °
а
а,И, = 0
Р,и = °
р
а
ару = 0
У
а
а
а
е
а
Р
а
Р,«, = 1
а,Р = 0
а
Р,Р = Рг.
а,у = 0
а
р,у = Р1'
а
Р,8 = °
Т а б л и ц а 24
е
V
8,
\&, = °
бг
«р
а
а
ч-,8, = °
в,8% = °
Ч».= РЧ '
«Т
Ч*
1*
*,8г = Рг,2
ъ
а
а
е,6, = °
^.8. = °
5
Ь
я
^8„ —
- Рх,"
а
а
е,бр = °
г,
ч-,8, = °
8
г
ае,8 ~
-Р
у.'
у
а
а
е
Ч*
в,г, = °
а,,,. = 0
V
а
а
^ = Р*.
Чг, = 0
Г
ав,Г -Р
- ^у'
а
у
\!> = °
ав,г, = 0
а-р.г, = °
ж
вгг
ч-,гг - *\
а
а
Ч-,8р = °
443
Т а б л и ц а 25
сох
юу
юг
4,8, = Й х'
,->83
4,8, = М У
4,8, = °
§„
,-_8н
4,8»= М*
4-8- У*
5,
4,5, = °
4-8, = °
4,8. =
«Р
4Л = °
4,8Р = °
ч«. =й«.
5*
4-8, = °
4,8, = °
4,8, = °
5,
4л = °
48, = °
а ю Л =-М а к : Р^
б,
4-8, = °
4,8, = °
4,8, = °
г.
4д, = °
V.= °
4,г, = °
<,
4,г, = °
ч<, = °
4,г, = ~ М*Л,
сг
Чг. = °
Ч'. = °
Чг. = °
хв
_— ,т
4,т„ =М х "
Чт„ = °
4т„=°
5,
т
тув
=Й
.
,-,т.,.
4л = °
Й
К,
,— .а„ Р.Г.,
ч% = °
4,ту, = °
4,™у„ = му
гв
Ч,т„ = °
4,т„= °
а*
4,«, = °
ч«. °
.-*аж
А Я а ^Г
4,а. = МК, - М*Л,
"V
Ч.*. = °
4«. = °
4,а. = Й^
Ч- Р.= Й У"
ЧР. = °
т
р.
444
й
4.Р, = х"
=
--<•>**,„
—т
Г
МК
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Авиационные приборы, информационно-измерительные системы и комплексы/
Под ред. В. Г. Воробьева. М.: Транспорт, 1992. 400с.
Автоматизация самолетовождения и управления воздушным движением /Агаджанов П. А., Воробьев В. Г., Кузнецов А. А. и др. М.: Транспорт, 1980. 350с.
А н и с и м о в Г. В., Кассин Ю . Г . Системы управления полетрм и пилотажно-навигационные комплексы. Рига: РКИИГА, 1984. 90 с.
Аэромеханика самолета. Динамика полета /Под ред. А. Ф. Бочкарева и
В. В. Андреевского. М.: Машиностроение, 1985. 358с.
Б е л о г о р о д с к и й С. Л. Автоматизация управления посадкой самолета. М.:
Транспорт, 1972. 350 с.
Б л е й к л о к Д ж . Г . Системы автоматического управления самолетами и
ракетами. М.: Машиностроение, 1969. 288 с.
Боднер В. А. Системы управления летательными аппаратами. М.: Машиностроение, 1973. 504 с.
Боднер В . А . , К о з л о в М . С . Стабилизация летательных аппаратов и
автопилоты. М.: Оборонгиз, 1961. 508 с.
Бортовые системы управления полетом /Под ред. Ю. В. Байбородина М.:
Транспорт, 1975. 336 с.
Г у с ь к о в Ю. П., З а г а й н о в Г. И. Управление полетом самолетов. М.:
Машиностроение, 1980. 214с.
К р а с о в с к и й А . А. Системы автоматического управления полетом и их
аналитическое конструирование. М.: Наука, 1973. 560 с.
К р а с о в с к и й А . А . , В а в и л о в Ю . А . , С у ч к о в А . И. Системы автоматического управления летательных аппаратов. М.: ВВИА им. Н. Е. Жуковского, 1986.
250с.
К у з н е ц о в С. В. Автоматические бортовые системы управления и пилотажнонавигационные комплексы. М.: МИИГА, 1987. 92 с.
К у з н е ц о в С. В. Автопилоты самолетов и вертолетов ГА. М.: МИИГА, 1988.
104с.
К у з н е ц о в С. В. Системы автоматического управления полетом самолетов ГА.
М.: МИИГА, 1989. 76 с.
К у з н е ц о в С. В. Системы директорного и автоматического управления заходом на посадку. М.: МИИГА, 1990. 96 с.
М и х а л е в И. А . , О к о е м о в Б . Н . , Ч и к у л а е в М . С . Системы автоматического управления самолетом. М.: Машиностроение, 1987. 240 с.
Н и к о л а е в Л . Ф . Аэродинамика и динамика полета транспортных самолетов.
М.: Транспорт, 1990. 392 с.
Основные принципы построения БКС ЦПНО /Воробьев В. Г., Кузнецов С. В.
и др. М.: МИИГА, !988. 104 с.
ОГЛАВЛЕНИЕ
Предисловие
Введение .
РАЗДЕЛ I
САМОЛЕТ КАК ОБЪЕКТ УПРАВЛЕНИЯ
Г л а в а 1. Основные положения динамики управления самолетом
1.1.
1.2.
1.3.
1.4.
1.5.
1.6.
6
Элементы конструкции и органы управления самолетом . . .
Параметры положения и движения самолета
Виды движений
Силы и перегрузки
Моменты сил
Управляющие воздействия и внешние возмущения
6
7
12
14
19
25
Глава 2. Математические модели пространственного движения самолета . .
33
2.1.
2.2.
2.3.
2.4.
2.5.
Уравнения движения
Линеаризованные уравнения движения
Уравнения движения в форме Коши
Уравнения движения в пространстве состояний
Уравнения продольного и бокового движения
Глава 3: Динамика продольного движения самолета
,
3.1. Структура продольного движения
3.1.1. Виды продольного движения
3.1.2. Моделирование продольного движения
3.2. Устойчивость продольного движения
3.2.1. Характеристики устойчивости продольного движения . .
3.2.2. Условия устойчивости продольного движения
3.3. Управляемость продольного движения 3.3.1. Характеристики управляемости продольного движения
3.3.2. Моделирование управляющих воздействий в продольном
движении
3.4. Внешние возмущения в продольном движении
3.4.1. Эксплуатационные факторы в продольном движении
3.4.2. Моделирование внешних возмущений в продольном движении
Глава 4. Динамика бокового движения самолета
4.1. Структура бокового движения
4.1.1. Виды бокового движения
4.1.2. Моделирование бокового движения
.
4.2. Устойчивость бокового движения
4.2.1. Характеристики устойчивости бокового движения . . .
4.2.2. Условия устойчивости собственного бокового движения
4.3. Управляемость бокового движения
4.3.1. Характеристики управляемости бокового движения . . .
4.3.2. Моделирование управляющих воздействий в боковом
движении
446
33
39
46
50
54
61
61
61
63
68
68
73
76
77
80
96
96
98
108
108
108
111
115
115
118
121
121
124
4.4. Внешние возмущения в боковом движении
4.4.1. Влияние эксплуатационных факторов на боковое движение
4.4.2. Моделирование внешних возмущений в боковом движении
. .
РАЗДЕЛ II
141
141
143
АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ ПОЛЕТОМ
Г л а в а 5. Автоматизированное управление рулями
154
5.1. Управление полетом и рулями
5.2. Рулевые приводы и сервоприводы
5.3. Кинематика ручного и автоматизированного управления . . .
Глава 6. Демпфирование колебаний
6.1. Автоматическое демпфирование колебаний по тангажу . . .
6.1.1. Демпферы тангажа
6.1.2. Моделирование демпфирования колебаний по тангажу
6.2. Автоматическое демпфирование колебаний по крену . . . .
6.2.1. Демпферы крена
6.2.2. Моделирование демпфирования колебаний по крену
6.3. Автоматическое демпфирование колебаний по рысканию . . .
6.3.1. Демпферы рыскания
6.3.2. Моделирование демпфирования колебаний по рысканию
154
159
169
175
175
175
181
188
188
190
193
193
199
Г л а в а 7. Автоматическое улучшение устойчивости и управляемости .
. .
204
7.1. Автоматическое улучшение устойчивости по перегрузкам . . .
7.2. Автоматическое улучшение продольной устойчивости и управляемости
7.2.1. Автоматы продольного управления
7.2.2. Моделирование улучшения продольной устойчивости и
управляемости
,
7.3. Автоматическое улучшение боковой устойчивости и управляемости
7.3.1. Автоматы бокового управления.
,. . .
7.3.2. Моделирование улучшения боковой устойчивости и
управляемости
7.4. Автоматическое регулирование продольного управления
7.5. Автоматическое регулирование путевого и поперечного управления
205
.
Г л а в а 8. Управление аэродинамическими силами
8.1. Автоматическое управление подъемной силой и силой лобового
сопротивления
8.1.1. Автоматы непосредственного управления подъемной силой и силой лобового сопротивления
8.1.2. Моделирование непосредственного управления подъемной силой
.
8.2. Автоматическое управление боковой силой
8.2.1. Автоматы непосредственного управления боковой силой
8.2.2. Моделирование непосредственного управления боковой
силой
8.3. Автоматическое управление маневренной нагрузкой крыла и
демпфирование аэроупругих колебаний самолета
211
211
220
226
226.
232
236
243
248
249
249
255
259
259
261
262
447
РАЗДЕЛ
III
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ
Глава 9. Стабилизация и управление угловым положением
266
9.1. Автоматическая стабилизация и управление углом тангажа
9.1.1. Автопилоты угла тангажа
9.1.2. Моделирование управления углом тангажа . . . . . .
9.2. Автоматическая стабилизация и управление углом крена . . .
9.2.1. Автопилоты угла крена
9.2.2. Моделирование управления углом крена
9.3. Автоматическая стабилизация и управление курсом
9.3.1. Автопилоты курса
9.3.2. Моделирование управления курсом
Г л а в а 10. Управление траекторным движением на маршруте
10.1. Автоматическая стабилизация и управление продольным
траекторным движением на маршруте
10.1.1. Системы автоматического управления продольным траекторным движением на маршруте
10.1.2. Моделирование управления продольным траекторным
движением самолета на маршруте
10.2 Автоматическая стабилизация и управление боковым траекторным движением на маршруте
10.2.1. Системы автоматического управления боковым траекторным движением на маршруте
10.2.2. Моделирование управления боковым траекторным движением на маршруте
10.3. Автоматическая стабилизация и управление скоростью полета
на маршруте
10.3.1. Системы автоматического управления скоростью и
числом М полета на маршруте
Ш.3.2. Моделирование управления скоростью полета на маршруте
Г л а в а 1 1 . Управление траекторным движением при заходе на посадку . . .
11.1. Директорное и автоматическое управление боковым траекторным движением
: . . . .
11.1.1. Системы директорного и автоматического управления
боковым траекторным движением
11.1.2. Моделирование управления боковым траекторным
движением
11.2. Директорное и автоматическое управление продольным траекторным движением при заходе на посадку
11.2.1. Системы директорного и автоматического управления
продольным траекторным движением
11.2.2. Моделирование управления продольным траекторным
движением
11.3. Автоматическая стабилизация скорости и управление скоростью полета
11.3.2. Моделирование управления скоростью
267
267
284
291
291
299
305
305
314
320
Глава 12. Управление траекторным движением на взлете и при посадке .
448
321
333
338
338
350
351
352
357
361
362
362
377
378
378
388
389
397
.
398
12.1. Директорное и автоматическое управление взлетом
12.2. Автоматическое управление посадкой
12.3. Директорное и автоматическое управление уходом на второй
круг
400
409
Приложение
Список рекомендуемой литературы
.
321
419
423
445