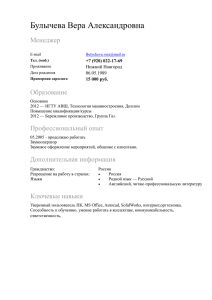
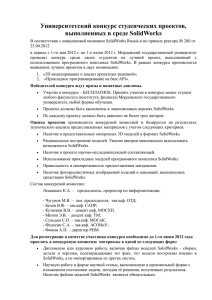
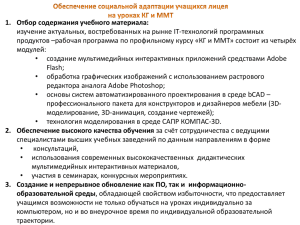
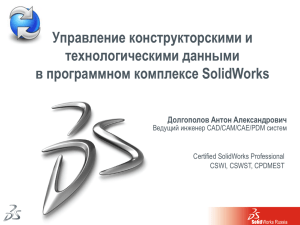
МИНОБРНАУКИ РОССИИ федеральное государственное бюджетное образовательное учреждение высшего образования «Московский государственный технологический университет «СТАНКИН» (ФГБОУ ВО «МГТУ «СТАНКИН») ОТЧЁТ О ПРОХОЖДЕНИИ Учебная (вид практики) на тему: «Алгоритм сборки триптерона в SolidWorks» ОБУЧАЮЩЕГОСЯ 1 КУРСА МАГИСТРАТУРЫ ГРУППЫ АДМ-23-05 (уровень профессионального образования) Кочин Артём Дмитриевич (ФИО полностью) КАФЕДРА: Робототехники и Мехатроники НАПРАВЛЕНИЕ ПОДГОТОВКИ: 15.04.06 Мехатроника и робототехника МЕСТО ПРОХОЖДЕНИЯ ПРАКТИКИ: Кафедра «РиМ» СРОКИ ПРОХОЖДЕНИЯ ПРАКТИКИ: 25.09.2023-31.12.2023 РУКОВОДИТЕЛЬ ПРАКТИКИ: Стебулянин Михаил Михайлович, зав.кафедрой (ФИО, должность) Москва 2023 Оглавление Введение ............................................................................................................................... 3 Создание сборки в Solidworks ............................................................................................ 3 Открытие режима моделирования сборки в SolidWorks ................................................. 3 Добавление детали в сборку SolidWorks .......................................................................... 5 Сохранение сборки в SolidWorks....................................................................................... 6 Добавление колёс Илона в сборку SolidWorks ................................................................ 7 Условия сопряжения деталей в сборке SolidWorks ......................................................... 9 Дальнейшая сборка ........................................................................................................... 13 Заключение......................................................................................................................... 17 2 Введение В данном уроке мы создадим сборку трёхстепенного параллельного манипулятора на реечной передаче в программном пакете SolidWorks, перемещающегося при помощи мобильной платформы на колёсах Илона, в которой рассмотрим основные сопряжения деталей. Создание сборки в Solidworks Переходим непосредственно к самой сборке изделия. В сборку у нас будут входить детали: Зубчатая рейка (рельс) – 1 шт. Зубчатое колесо – 3 шт. Каретка верхняя – 3 шт. Каретка основная – 3 шт. Колёса Илона – 16 шт. Мобильная платформа – 1 шт. Насадка – 1 шт. Рабочий орган – 1 шт. Рычаг тип 1 – 3 шт. Рычаг тип 2 – 3 шт. Фланец насадки – 1 шт. Шаговый двигатель NEMA 17 – 3 шт. Шарнир крайнего рычага тип 1 – 2 шт. Шарнир центрального рычага тип 1 – 1 шт. Все детали для удобства моделирования должны лежать в одной папке на диске. Открытие режима моделирования сборки в SolidWorks Начинаем создание. На начальном экране SolidWorks нажимаем «Файл», «Новый». В окне «Новый документ SolidWorks» выбираем «Шаблон сборки» и нажимаем «ОК» (рис. 1): 3 Рисунок 1 – Выбор шаблона сборки в SolidWorks Открывается режим моделирования сборки в SolidWorks и перед нами открывается окно «Открыть» и окно «Начать сборку» (рис. 2): Рисунок 2 – Окна «Открыть» и «Начать сборку» в SolidWorks Закрываем эти окна и переходим к добавлению первой детали. 4 Добавление детали в сборку SolidWorks Добавим первую деталь в сборку. Для этого на вкладке «Сборка» нажимаем на инструмент «Вставить компоненты» (рис. 3): Рисунок 3 – Инструмент «Вставить компоненты» в SolidWorks Заходим в папку с нашими деталями. Выбираем деталь «Мобильная платформа» и нажимаем «Открыть». Как мы видим, данная платформа включает в себя зубчатую рейку, находящуюся на ней. Деталь сразу же отображается в окне сборки (рис. 4): Рисунок 4 – Деталь в сборке Далее надо определить место на сборке для детали. Первую деталь рекомендуется ставить в точку начала координат сборки, то есть совмещать точку начала координат детали с точкой начала координат сборки. 5 Для этого совмещаем курсор мыши с точкой начала координат сборки, и как только появится иконка рядом с курсором, как на картинке ниже, – кликаем левой кнопкой мыши, тем самым определяя положение детали (рис. 5): Рисунок 5 – Определение положения первой детали сборки Сохранение сборки в SolidWorks Далее не помешает сохранить сборку. Нажимаем «Файл», «Сохранить как», присваиваем имя «Триптерон» и нажимаем «Сохранить» (рис. 6): 6 Рисунок 6 – Сохранение сборки SolidWorks Добавление колёс Илона в сборку SolidWorks Далее мы добавим ещё одну деталь в нашу сборку – колёсо Илона (рис. 7): Рисунок 7 – Добавление колеса Илона в сборку Колёс нужно 16 шт, поэтому с помощью инструмента «Линейный массив компонентов» увеличим их количество (рис. 8): 7 Рисунок 8 – Команда «Линейный массив компонентов» в SolidWorks Выделяем наше колесо и нажимаем данный инструмент, открываются его параметры, они практически ничем не отличаются от аналогичных инструментов в режимах моделирования детали и создания чертежа. В параметрах инструмента в качестве направления 1 выбираем нижнюю кромку платформы, интервал между компонентами ставим любой, например, 50 мм и количество компонентов ставим 16 (рис. 9): Рисунок 9 – Параметры инструмента «Линейный массив компонентов» Подтверждаем построение. И на нашей сборке уже есть 16 колёс Илона с расстоянием между копиями 50 мм (рис. 10): 8 Рисунок 10 – 16 колёс на сборке Условия сопряжения деталей в сборке SolidWorks Теперь надо расположить детали на сборке относительно друг друга, в этом нам помогут сопряжения (рис. 11): Рисунок 11 – «Условия сопряжения» в сборке SolidWorks Выбираем данный инструмент и как обычно слева открываются параметры инструмента (рис. 12): 9 Рисунок 12 – Параметры инструмента «Условия сопряжения» Подробно на всех настройках данного инструмента останавливаться не будем. Сейчас насадим колёса на оси платформы с двух сторон, для этого выбираем отверстие колеса (рис. 13): Рисунок 13 – Выбор отверстия колеса 10 Также выбираем оси платформы и сразу после выбора для них автоматически выбирается сопряжение «Концентричность», то есть оси выбранных диаметров выравниваются (рис. 14): Рисунок 14 – Сопряжение «Концентричность» Подтверждаем сопряжение нажатием на зелёную галочку. Далее нужно вставить ось до конца в отверстие колеса, для этого выбираем торец колеса и также торец оси, которой она должна сопрягаться с колесом. Сразу после выбора для них проставится взаимосвязь «Совпадение» и колесо насадится на ось до упора (рис. 15): 11 Рисунок 15 – Взаимосвязь «Совпадение» Делаем точно также с оставшимися 15 колёсами, колёса должны быть насажены на оси платформы с двух сторон. Должна получиться такая картинка (рис. 16): Рисунок 16 – Сопряжённые колёса и платформа 12 Дальнейшая сборка Дальнейшая сборка основана на аналогичных сопряжениях. Будем идти снизу вверх: для начала установим 3 каретки основные в пазы нашего рельса (рис. 17): Рисунок 17 – Установка кареток Затем установим поверх них наши двигатели, к валам которых присоединим зубчатые колёса (рис. 18): 13 Рисунок 18 – Установка двигателей и зубчатых колёс Далее установим на двигатели каретки верхние, к которым будут крепиться наши шарниры (рис. 19): 14 Рисунок 19 – Установка верхних кареток и шарниров Установим на шарниры звенья нашего трипетрона. Всего будет 3 пары звеньев, сходящихся на рабочем органе (рис. 20): Рисунок 21 – Установка звеньев и рабочего органа триптерона Наконец, осталось установить фланец насадки и саму насадку на рабочий орган манипулятора (рис. 21): 15 Рисунок 21 – Установка фланца насадки и насадки Итоговая модель манипулятора представлена на рисунке 22: Рисунок 22 – Итоговая модель манипулятора 16 Заключение В данном уроке был представлен процесс создания сборки трёхстепенного параллельного манипулятора на реечной передаче в SolidWorks. Рассмотрены основные этапы, начиная от вставки компонентов до установки взаимосвязей и создания структуры манипулятора. Описан процесс сопряжения деталей, включая использование концентричности и совпадения для правильного выравнивания и расположения элементов. Приведены шаги установки колёс, кареток, двигателей, зубчатых колёс, шарниров, а также насадки и фланца. Важным моментом является строгое следование параметрам и взаимосвязям, чтобы обеспечить правильное функционирование манипулятора. Этот урок призван помочь вам освоить базовые навыки создания сборок в SolidWorks и предоставить представление о том, каким образом конструируются трёхстепенные параллельные манипуляторы. 17