Studlancer.net - закажи реферат, курсовую, диплом!
Казанский Государственный Технический Университет им. А. Н. Туполева
Кафедра Автоматики и Управления
Расчетно-пояснительная записка
по дисциплине: Системы Автоматического Управления
на тему: Система управления антенной РЛС
Выполнил:
Ульянова А.И.
Руководитель:
Маханько А.А.
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Содержание
1. Расчет масс, моментов инерции антенны
2. Составление математической модели объекта
3. Проектирование редуктора
4. Построение структурной схемы системы, логарифмических характеристик.
Оценка качества системы
5. Корректирование системы
6. Корректирование системы
Вывод
Список использованной литературы
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
1. Расчет масс, моментов инерции антенны
Масса антенны:
m = 20кг;,
Масса центральной пластины:
m1 = 20кг ∙
600мм
1400мм
= 8,7кг;,
Массы боковых пластин:
m2,3 = 20кг ∙
400мм
1400мм
= 5,7кг;,
Антенна рассматривается как система трех объектов с центрами масс
O,O’,O’’.
См. рис.1.
Рис. 1
Момент инерции центральной пластины относительно оси вращения
OY:
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
J1у = m1 ∙
l21
3
= 20кг ∙
(0,6м)2
3
= 1,04, кг ∙ м2 ;,
Моменты инерции боковых пластин относительно оси вращения OY:
J2у = m2 ∙
l22
3
+ (m1 + m2 ) ∙ l2 = 5,7кг ∙
(0,4м)2
3
+ 5,7кг ∙ (0,5м)2 =
1,73, кг ∙ м2 ,,
J3у = m3 ∙
l23
3
+ (m1 + m3 ) ∙ l2 = 5,7кг ∙
(0,4м)2
3
+ 5,7кг ∙ (0,5м)2 =
1,73, кг ∙ м2 ,,
где -расстояние между центрами масс пластин.
Общий момент инерции:
J0у = 1,04 + 1,73 + 1,73 = 4,5, кг ∙ м2 ,,
Теперь, зная массу и момент инерции, можем приступать к
исследованию поведения математической модели объекта.
2. Составление математической модели объекта
Математическая модель составлена методом Лагранжа. При этом
введены допущения, что редуктор идеальный, валы абсолютно жесткие.
Рис. 2
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Система имеет 3 степени свободы.
Выберем обобщенные координаты (см. рис.2)
q1 = φ1 ; q2 = φ2 ; q3 = φ3 ; qдв = φдв ;,
Принимаем
qдв = u ∙ φ1 , где -передаточное число редуктора.
Рассчитаем кинетическую энергию.
Кинетическая энергия антенны
T1 = J1 ∙
T2 = J2 ∙
T3 = J3 ∙
q̇ 21
2
q̇ 22
2
q̇ 23
2
;,
;,
;,
Кинетическая энергия двигателя
TДВ = JДВ ∙
u2 ∙q̇ 21
2
;,
Суммарная кинетическая энергия
Tсум = J1 ∙
q̇ 21
2
+ J2 ∙
q̇ 22
2
+ J3 ∙
q̇ 23
2
+ JДВ ∙
u2 ∙q̇ 21
2
;,
Частные производные по углу и по скорости :
∂Tсум
∂q1̇
∂Tсум
∂q2̇
= (J1 + JДВ ∙ u2 ) ∙ q1̇ ; ,
= J2 ∙ q2̇ ;,
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
∂Tсум
∂q3̇
∂Tсум
∂q1
∂Tсум
∂q2
∂Tсум
∂q3
d
dt
d
dt
d
dt
∙(
∙(
∙(
= J3 ∙ q3̇ ;,
= 0; ,
= 0;,
= 0;,
∂Tсум
∂q1̇
∂Tсум
∂q2̇
∂Tсум
∂q3̇
) = (J1 + JДВ ∙ u2 ) ∙ q̈ 1 ;,
) = J2 ∙ q̈ 2 ;,
) = J3 ∙ q̈ 3 ;,
Запишем уравнение Лагранжа:
(J1 + JДВ ∙ u2 ) ∙ q̈ 1 = Q1
;,
{
J2 ∙ q̈ 2 = Q 2
J3 ∙ q̈ 3 = Q 3
Найдем обобщенную силу, для этого сначала найдем работу,
совершаемую системой при повороте на малые углы φ1 , φ2 , φ3 .
δА1 = Мдв ∙ u ∙ δq1 − c ∙ (q1 − q2 ) ∙ δq2 − c ∙ (q1 − q3 ) ∙ δq1 ;,
δА2 = c ∙ (q1 − q2 ) ∙ δq2 ;,
δА3 = c ∙ (q1 − q3 ) ∙ δq3 ;,
Обобщенные силы:
Q1 = δА1 /δq1 = Мдв ∙ u ∙ δq1 − c ∙ (q1 − q2 ) ∙ δq2 − c ∙ (q1 − q3 ) ∙ δq1 ;,
Q 2 = δА2 /δq2 = c ∙ (q1 − q2 );,
Q 3 = δА3 /δq3 = c ∙ (q1 − q3 );,
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Получили систему трех уравнений:
Определим жесткость системы
𝐜 = 𝐜𝟏 = 𝐜𝟐 = (𝟐𝛑𝐟)𝟐 ∙ 𝐉𝟐,𝟑 = 𝟕𝟕, 𝟎𝟎𝟑, Н ∙ м;,
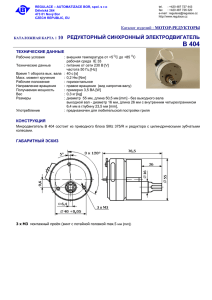
Выбор двигателя
Основными данными для выбора электродвигателя является мощность
на выходному валу, частота его вращения, момент инерции ротора.
Для
расчета
необходимой
мощности
рассматриваем
самый
напряженный режим работы.
Nвых = M ∙ (3 ÷ 5) ∙ ωвых = J0у ∙ ε ∙ (3 ÷ 5) ∙ ωвых ;,
ωвых = 60
ε=
dωвых
dt
град.
=
с
= 1,047
1,047
0,1
рад.
с
= 10,47,
= 10,002
рад.
c2
об.
мин
;,
;,
Nвых = J0у ∙ ε ∙ ωвых ∙ 3 = 4,5 ∙ 10,47 ∙ 3 ∙ 1,047 = 148, Вт;,
Nпотр =
Nвых
КПД редуктора
;,
Допустим, что редуктор будет четырехступенчатый цилиндрический,
тогда
Nпотр =
Nвых
0.974
= 166,3, Вт;,
Nнеобх > Nпотр ,
Я выбрала двигатель постоянного тока ЭДМ-14. Это малоинерционный
реверсивный электродвигатель постоянного тока с постоянными магнитами и
гладким якорем. Он имеет высокоточные характеристики, отличается
высоким быстродействием, малым напряжением трогания, низким моментом
инерции. Технические параметры двигателя приведены в таблице 1.
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Таблица 1
Параметр
Исполнение
ЭДМ-14
Напряжение питания
27 В постоянного тока
Номинальная мощность
180 Вт
Потребляемый ток
10,5А , не более
Номинальный момент
0,058 кгс·м
Номинальная частота вращения
3000 об/мин
Номинальный КПД
65%, не менее
Момент инерции якоря , кг·м2
0,047·10 -3
Электромеханическая
постоянная
не более 10·10-3
времени, с
Режим работы
продолжительный
Схема соединений
двухпроводная
Исполнение
водонепроницаемое
Напряжение трогания на холостом ходу
1,5 В, не более
Направление вращения
реверсивное
Масса
7,4 кг
Габаритные размеры, мм
(диам.)165 х 236
пылебрызгозащишенное
Сопротивление якоря
Rя =
U
5∙Iном
=
27
5∙10,5
= 0,51, Ом;,
Постоянная времени двигателя:
Tэм = 0,01;,
Выбор тахогенератора
Выбранный тахогенератор 1,6ТГП-2. Это коллекторный тахогенератор
постоянного тока выполняется с зубцовым ротором. Крепление – фланцевое
с упорным буртиком и за корпус. Режим работы продолжительный.
Номинальная частота вращения 3000об/мин.
Крутизна выходного напряжения S=2мВ/(об/мин)
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Нелинейность 0,5%
Асимметрия 1%
Сопротивление нагрузки 10 кОм
Условия эксплуатации.
Вибрационные нагрузки:
диапазон частот 1-3000,Гц
ускорение 150,м/с2
Температура окружающей среды (-60..+85)ºС
Передаточное
число
тахогенератора
находим
через
крутизну
выходного напряжения:
Ктг = 𝐒 = 𝟐
мВ
об
мин
= 𝟎, 𝟎𝟏𝟗,
В
,
рад/с
3. Проектирование редуктора
Кинематический расчет
Общее передаточное число редуктора
nдв
u=
nвых
=
3000,об/мин
10,022,об/мин
= 299,94,
1
i = = 0,0033;,
u
Проектируемый редуктор будет комбинированного типа, в виде одной
ступени цилиндрического редуктора и выходной ступени червячной
передачи.
Общее передаточное число привода
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
u 299,94
Принимаем передаточное число червячной передачи u2=40.
Найдем передаточное число цилиндрической передачи
Определяем частоту вращения каждого вала.
Частота вращения входного вала
n1 nдв 3000, об / мин ;
частота вращения промежуточного вала
n2
n1 3000
400, об / мин ;
u1
7,5
частота вращения выходного вала
n3
n2 400
10, об / мин .
u2
40
Таким образом, частота вращения выходного вала соответствует
заданному значению.
Принимаем число зубьев шестерни ступени z1=20, тогда число зубьев
зубчатого колеса z2= z1* u1=140, принимаем z2=140.
Уточняем значения передаточных чисел:
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
u1*
z 2 140
7,5
z1
20
Силовой расчет
Найдем крутящие моменты, передаваемые валами механизма с учетом
передаточных отношений и КПД.
Определяем крутящий момент на входном валу:
Т1 Т дв
N дв
,
где - круговая частота вращения вала двигателя
nдв
30
3,14 3000
314, рад / с .
30
Тогда
Т1
N дв
180
0,573, Н м
314
Определяем крутящий момент на промежуточном валу
Т 2 Т1 u1 з п 0,573 7,5 0,97 0,99 4,14, Н м;
определяем крутящий момент на выходном валу редуктора:
Т 3 Т 2 u 2 ч п 4,14 40 0,72 0,99 118,13, Н м.
Сводная таблица результатов расчета:
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Таблица 2
Частота вращения вала, об/мин
Моменты на валах, Н·м
n1 = 3000
T1 = 0.573
n2 = 400
T2 = 4,14
n3 = 10
T3 = 118,13
Проектирование червячной передачи
Выбор материалов
Материалы червяка и червячного колеса выбирают из условий
минимального износа и потерь на трение, обеспечения стойкости против
заедания. Червяки обычно изготавливаются из углеродистых сталей (40, 45) и
легированных (15ХА, 40ХН). Архимедовы и конволютные червяки, рабочие
поверхности которых обычно не шлифуются, изготавливают из относительно
мягких (НВ ≤ 350) сталей, подвергнутых термическому улучшению.
Червячные
колеса
изготовляют
из
антифрикционных
сплавов.
Высокооловянные бронзы применяют для высоких скоростей скольжения,
безоловянные
бронзы
и
латуни
используют
при
малых
скоростях
скольжения.
Выбираем для червяка сталь 45, для которой предел прочности в =
560, Н/мм2;
т =300, Н/мм2 твердость НВ = 160.
Для червячного колеса выбираем материал – бронзу Бр АЖМц 10-31,5, для которой
в = 500 Н/мм2, т = 200 Н/мм2.
Расчет геометрических параметров передачи
Так как передаточное число червячной передачи u2 = 40, то число
заходов червяка z3=1. Тогда число зубьев червячного колеса
z4 z3 u2 1 40 40 .
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Параметр q – число модулей в диаметре делительной окружности
червяка
q
z4 40
10 .
4
4
Межосевое расстояние определяется
a 61 3
T3 K
2H
,
где К = К·Кv, где К - коэффициент неравномерности распределения
нагрузки по длине контакта, Кv – коэффициент динамической нагрузки.
Коэффициент К для предварительных расчетов определяем по
формуле
К = 0,5·(Ко+1),
где Ко - начальный коэффициент неравномерности распределения
нагрузки: Ко= 1,05. Подставив это значение в формулу, получим:
К = 0,5·(Ко+1) = 0,5·(1,05+1) = 1,025.
Коэффициент Кv для предварительных расчетов принимаем Кv=1.
Тогда коэффициент К
К = К·Кv = 1,025·1 = 1,025.
Находим межосевое расстояние:
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
a 61 3
T3 K
2
H
61 3
118130 1,025
100,01 , мм.
165 2
Осевой модуль передачи
m
2a
2 100,01
4 , мм.
z4 q
40 10
Округляем полученное значение модуля до ближайшего значения из
стандартного ряда по ГОСТ 19672-74: m = 4.
Уточняем межосевое расстояние:
a
m q z4
2
4 10 40
100 ,мм.
2
Уточняем коэффициент нагрузки К.. Для уточнения коэффициента
динамической нагрузки Кv определяем окружную скорость червячного
колеса:
VК
m z 4 n3
60 1000
3,14 4 40 10
0,084 , м/с.
60 1000
Так как VК = 0.084 < 3 м/с, принимаем Кv = 1. Тогда коэффициент К =
1.
Угол подъема витка червяка по делительному цилиндру:
z3
1
arctg 0,1 , рад.
10
q
arctg
Окружная скорость на червяке
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
V5
m q n2
60 1000
3,14 4 10 400
0,83 , м/с.
60 1000
Уточняем скорость скольжения в зацеплении
VS
V5
0,83
0,82 , м/с.
cos cos(0,1)
Уточняем допускаемое контактное напряжение
Н Н 25 VS
170 25 0,82 149,25 , Н/мм2.
Проверяем контактную прочность
H
475 T3 K 475 118130 1
163,26 , Н/мм2.
a
a
100
100
Определим основные геометрические размеры червячной передачи.
Диаметр делительной окружности червяка
d 3 m q 4 10 40, мм
.
Диаметр окружности впадин витков червяка
d f 3 d 3 2,4m 40 2,4 4 30,4, мм
.
Диаметр окружности вершин витков червяка
d a 3 d 3 2 m 40 2 4 48, мм
.
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Длина нарезанной части червяка
b3 (11 0,06 z3 )m (11 0,06 1)4 44,24, мм .
Принимаем длину нарезанной части червяка равной b5 = 45 мм.
Диаметр делительной окружности червячного колеса
d 4 m z 4 4 40 160, мм
.
Диаметр окружности впадин зубьев червячного колеса
d f 4 d 4 2.4m 160 2.4 4 150,4, мм
Диаметр окружности вершин зубьев червячного колеса
d a 4 d 4 2m 160 2 4 168, мм
Наибольший диаметр червячного колеса
d 4 am d а 4
6m
z3 2
168
64
176, мм .
1 2
Ширина венца червячного колеса
b4 0,75da3 0,75 48 36, мм .
Проектирование зубчатой цилиндрической передачи
Выбор материалов
Основными
материалами
для
изготовления
Размещено на Vuzlit.ru
зубчатых
колес,
Studlancer.net - закажи реферат, курсовую, диплом!
предназначенных для передачи значительных усилий, а также колес
мелкомодульных, являются стали:
конструкционные 20, 35, 45, 50 (ГОСТ 1050-60);
легированные 15Х, 20Х, 40Х (ГОСТ 4543-61);
инструментальные У8А, У10А и др.
Для повышения твердости материалы подвергаются нормализации и
термообработке – цементации, закалке, азотированию и т.п.
Нормализованные
стали
из-за
их
пониженной
прочности
для
изготовления зубчатых колес применяют реже и только для тихоходных
малонагруженных передач.
Термоулучшенные стали обладают большей прочностью и твердостью.
В то же время они хорошо поддаются чистовому нарезанию после
термообработки, хорошо прирабатываются. Находят широкое применение
для передач, к которым не предъявляются жесткие требования по весу и
габаритам.
При изготовлении зубчатых колес с невысокой и средней твердостью
(НВ≤350) желательно, чтобы соблюдалось соотношение:
НВшестерни = НВколеса + (25..50).
Это необходимо для того, чтобы колеса лучше прирабатывались.
Учитывая это соотношение, выбираем материалы для изготовления
шестерни: сталь с поверхностной закалкой ТВЧ 40Х, B=900 Н/мм2,
НВ=273.
Расчет геометрических параметров ступени
Принимаем число зубьев шестерни ступени z1=20, тогда число зубьев
зубчатого колеса z2= z1* u1 =140.
При проектном расчете закрытых цилиндрических зубчатых передач
основные размеры определяются расчетом на контактную прочность.
Расчетные формулы, разрешенные относительно межосевого расстояния а,
имеют вид
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
340
а (u 1) 3
u [ ] H
2
T2 k H
340 4140 1,17
(7,5 1) 3
70,7, мм
ba
0,3
7,5 240
2
K H - коэффициент нагрузки.
K H K H K HV
K H - коэффициент неравномерности распределения нагрузки по длине
контакта, при переменной нагрузке по коэффициенту относительной
ширины. Находим, что K H 1,05 .
KHV – коэффициент динамической нагрузки. Находим, что K 1,1 .
HV
K H 1,05 1.1 1,17
ba -относительная ширина передачи, выбираем
ba
0,3 .
Определяем модуль зацепления
m
2a
2 70,7
0,88 .
z1 z 2 20 140
Принимаем значение модуля m = 1 (по размерам ГОСТ 9563-80).
После округления модуля уточняем межосевое расстояние
а
m ( z1 z 2 ) 1 160
80, мм
2
2
Тогда ширина венца зубчатого колеса будет равна:
b2
ba
a 0,3 80 24 , мм.
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Тогда ширина шестерни будет равна:
b3 b4 2 m2 24 2 1 26 , мм.
Рассчитаем основные геометрические параметры.
Диаметр делительной окружности шестерни
d1 m z1 1 20 20 , мм;
диаметр делительной окружности колеса
d 2 m z 2 1140 140 , мм.
Диаметры окружностей вершин шестерни: d1a d1 2 m 20 2 1 22 ,
мм.
Диаметры окружностей вершин колеса
d 2 a d 2 2 m 140 2 1 142 , мм.
Диаметры окружностей впадин шестерни
d1 f d1 2,5 m 20 2,5 1 17,5 , мм;
Диаметры окружностей впадин колеса
d 2 f d 2 2,5 m 140 2,5 1 137,5 , мм.
Проектирование валов
Выбор материала
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Валы
выполняют
из
конструкционных
сталей
35,
40,
45,
нормализованных и улучшенных. Наибольшее распространение получила
сталь 45, которую часто называют «валовой» сталью. Для высоко
нагруженных валов, а также, исходя из особенностей конструкции
(например, вал, выполненный заодно с шестерней), применяют легированные
стали 40Х, 40ХН, 35ХГСА и др. Валы из этих материалов подвергают
улучшению, закалке с высоким отпуском или поверхностной закалке с
низким отпуском.
В нашем случае выходной вал средненагруженный, поэтому выбираем
материал для него – сталь 40Х.
Компоновка редуктора
Предварительные значения диаметров концевых участков валов
определяем только из расчета на кручение при пониженных допускаемых
напряжениях.
Диаметр входного вала
d1 3
T1
, мм ,
0,2 1
где [1] - условное допускаемое напряжение при кручении для
входного вала. Принимаем 1 15, Н / мм 2 . Тогда
d1 3
573
5,76, мм
0,2 15
Диаметр промежуточного вала
d2 3
T2
0,2 2
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
где [2] - условное допускаемое напряжение при кручении для первого
промежуточного вала. Принимаем 2 22, Н / мм 2 .
d2 3
4140
9,79 ,мм
0,2 22
Диаметр выходного вала
d3 3
T3
, мм ,
0,2 3
[3] - условное допускаемое напряжение при кручении для выходного
вала. Принимаем 3 22, Н / мм 2 .
d3 3
118130
29,7, мм
0,2 22
Полученные значения округляем в большую сторону до ближайшего
стандартного значения (по ГОСТ 6636-69), учитывая имеющиеся в каталогах
значения внутренних диаметров подшипников. А при выборе диаметра
входного вала учтем диаметр выходного вала двигателя (dдв=6 мм).
Принимаем диаметр входного вала d1= 6, мм;
диаметр промежуточного вала d2 = 10, мм;
диаметр выходного вала d3 = 30, мм.
На валах располагаем колеса и шестерни, принимая расстояние между
вращающимися деталями и вращающимися деталями и корпусом rс 5 мм .
Зазор между торцами ступиц колес и шестерен, а также между торцами
колес и подшипников принимаем равным 5 мм. Расстояние от края колеса до
корпуса должно быть примерно 5мм.
Конструирование выходного вала
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Выходной вал состоит из четырех цилиндрических участков: первый
участок
диаметром
d1 28 мм
предназначен
подшипник; на втором участке диаметром
под
радиально-упорный
d2 30 мм
устанавливается
червячное колесо; на третьем участке диаметром d1 28мм устанавливается
второй подшипник; четвертый участок – выходной конец вала, на нем
предусмотрен шпоночный паз для установки полумуфты, d3 26 мм .
Переходные участки вала между двумя ступенями разных диаметров
имеют галтели радиуса R=1 мм. А на концах вала предусмотрены фаски
шириной 2 мм под углом 45.
Для крепления червячного колеса предусмотрено отверстие под конец
установочного винта с номинальным диаметром резьбы М8.
Конструирование вала цилиндрической зубчатой передачи
Конструкция входного вала цилиндрической зубчатой передачи.
Диаметр сечения вала для крепления соединительной муфты d1 6 мм равен
диаметру вала для установки подшипника d П 6 мм . Для установки одного
подшипника делаем выемку для стопорного кольца. Сечение вала между
зубчатой шестерней и подшипниками увеличиваем до d2 13мм с целью
обеспечения упора подшипникам.
Промежуточный вал передачи. Для крепления соединительной муфты
входной участок вала выполняем сечением d1 3мм , для установки и
закрепления на валу колеса цилиндрической зубчатой передачи диаметр
сечения равен d2 12 мм . На этом валу также располагается червяк. Он
выполняется вместе с валом. Сечение вала между подшипником и червяком
увеличиваем до d3 14 мм с целью обеспечения упора подшипникам.
Все валы делаем из материала 40Х ГОСТ4543-71.
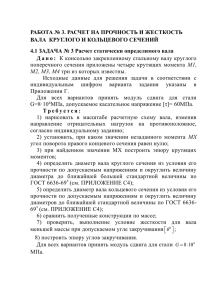
Для соединения выходного вала двигателя и входного вала редуктора
выбираем поводковую муфту, позволяющую соединять валы, имеющие
небольшие осевые и радиальные смещения.
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Рис.3 Поводковая муфта
Размеры
муфты
берем
из
справочника,
задаваясь
диаметром
соединяемых концов валов. Этот диаметр d = 3 мм. Данные в таблице 3.
Таблица 3
d1, мм
b, мм
d, мм
d2, мм
r, мм
D, мм
l, мм
6
2
4
12
9
25
8
Для соединения второго вала редуктора и входного вала редуктора
выбираем поводковую муфту, позволяющую соединять валы, имеющие
небольшие осевые и радиальные смещения.
Размеры
муфты
берем
из
справочника,
задаваясь
диаметром
соединяемых концов валов. Этот диаметр d = 3 мм. Данные в таблице 4.
Таблица 4
d1, мм
b, мм
d, мм
d2, мм
r, мм
D, мм
l, мм
3
2
2
8
9
22
6
Конструирование корпусных деталей
Корпус привода схематично показан на рис.4. Он состоит из стакана 1,
двух
крышек
корпуса
редуктора
2,
3
и
основания
корпуса
4.
Электродвигатель крепится к стакану. В стакане имеется окно для доступа к
муфте, а также место для крепления платы. В юбке стакана и в крышке
корпуса редуктора сверлятся отверстия для винтов, скрепляющих стакан с
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
корпусом. Винты вкручиваются в специальные приливы в корпусе
редуктора, в которых предусмотрены резьбовые отверстия. Подшипники
располагаются в приливах, которые имеются в крышке корпуса редуктора и в
самом корпусе редуктора, закрываются крышками, обеспечивающими
фиксацию подшипников в корпусе и герметичность корпуса.
Стакан, корпус редуктора и крышка редуктора выполнены из
алюминиевого литейного сплава АЛ7. Толщина корпусных деталей 1, 2, 3,4 6 мм. антенна двигатель вал муфта
8. Расчет допусков размеров и формы выходного вала
H7
Выбираем посадку k 6 для участков вала под подшипники. Причем
один участок делим на 2 части: под подшипник и свободная поверхность.
Для свободной поверхности назначаем посадку с зазором
H7
f 6 , чтобы
подшипник беспрепятственно проходил до своего посадочного места.
Верхнее отклонение вала ei 10 мкм .
Нижнее отклонение вала es 1мкм .
Верхнее отклонение отверстия ES 0 .
Нижнее отклонение отверстия EI 15мкм .
Наибольший предельный размер вала
d max d ei 7 0,010 7,010, мм .
Наименьший предельный размер вала
d min d es 7 0,001 7,001, мм .
Допуск вала
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
IT es ei 0,010 0,001 0,009, мм .
Наибольший предельный размер отверстия
Dmax D ES 7 0 7,000, мм .
Наименьший предельный размер отверстия
Dmin D EI 7 0,015 6,985мм .
Минимальный натяг
N min d min Dmax 7,001 7,000 0,001, мм .
Максимальный натяг
N max d max Dmin 7,010 6,985 0,025, мм .
Для посадки подшипников в корпус выбираем посадку H7/k6
Верхнее отклонение вала es 0 .
Нижнее отклонение вала ei 10 мкм .
Верхнее отклонение отверстия ES 15мкм .
Нижнее отклонение отверстия EI 0 мкм .
Наибольший предельный размер вала
d max d es 10 0 10,000, мм .
Наименьший предельный размер вала
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
d min d ei 10 0,010 9,990, мм .
Допуск вала
IT es ei 0 0,010 0,010, мм .
Наибольший предельный размер отверстия
Dmax D ES 10 0,015 10,015, мм .
Наименьший предельный размер отверстия
Dmin D EI 10 0 10,000, мм .
Минимальный зазор
S min Dmin d max 10,000 10,000 0, мм .
Максимальный зазор
S max Dmax d min 10,015 9,990 0,025, мм .
Для посадки зубчатого колеса на вал выбираем посадку H7/s6
Верхнее отклонение вала es 20мкм .
Нижнее отклонение вала ei 14мкм .
Верхнее отклонение отверстия ES 15мкм .
Нижнее отклонение отверстия EI 0 мкм .
Наибольший предельный размер вала
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
d max d es 7 0,020 7,020, мм .
Наименьший предельный размер вала
d min d ei 7 0,014 7,014, мм .
Допуск вала
IT es ei 0,020 0,014 0,024, мм .
Наибольший предельный размер отверстия
Dmax D ES 7 0,015 7,015, мм .
Наименьший предельный размер отверстия
Dmin D EI 7 0 7,000, мм .
Минимальный натяг
N min d min Dmax 7,014 7,015 0,001, мм .
Максимальный натяг
N max d max Dmin 7,020 7,000 0,020, мм .
Для посадки шпоночных соединений выбираем посадку H7/js6
Верхнее отклонение вала es 4,5 мкм .
Нижнее отклонение вала ei 4,5 мкм .
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Верхнее отклонение отверстия ES 15мкм .
Нижнее отклонение отверстия EI 0 мкм .
Наибольший предельный размер вала
d max d es 6,5 0,0045 6,50045, мм .
Наименьший предельный размер вала
d min d ei 6,5 0,0045 6,49955, мм .
Допуск вала
IT es ei 0,0045 0,0045 0,009, мм .
Наибольший предельный размер отверстия
Dmax D ES 6,5 0,015 6,5015, мм .
Наименьший предельный размер отверстия
Dmin D EI 6,5 0 6,5000, мм .
Максимальный зазор
S max Dmax d min 6,5015 6,49955 0,00195, мм .
Максимальный натяг
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
N max d max Dmin 6,50045 6,5000 0,0045, мм .
4. Построение структурной схемы системы, логарифмических
характеристик. Оценка качества системы
Рис. 4. Структурная схема системы. Определение передаточной
функции замкнутой системы в MathLab.
Wзам =
0.1438p5 −1.277∙10−16 p4 +12.8p3 −5.685∙10−15 p2 +284.9p+
;,
0.1438 s^5 - 1.277e-016 s^4 + 12.8 s^3 - 5.685e-015 s^2 + 284.9 s + 8.048e041
s^8 + 100 s^7 + 124.1 s^6 + 1.233e004 s^5 + 3578 s^4 + 3.505e005 s^3 +
1640 s^2 + 1640 s - 5.213e-015
6261 s^5 - 5.561e-012 s^4 + 5.574e005 s^3 - 2.475e-010 s^2 + 1.24e007 s +
6.258e-041
s^8 + 100 s^7 + 124.1 s^6 + 4.837e004 s^5 + 3578 s^4 + 3.56e006 s^3 +
1640 s^2 + 7.142e007 s - 4.361e-009
5. Корректирование системы
Задача коррекции состоит в том, чтобы сократить время переходного
процесса и увеличить запас устойчивости системы.
Корректирующие звенья могут вводиться в систему различными
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
методами. Выбор типа корректирующего устройства определяется удобством
технического осуществления. Введение местных обратных связей требует
дополнительных датчиков ускорения. Поскольку в системе управления
решено было использовать электрический сигнал в виде напряжения
постоянного тока, удобно будет использовать метод последовательной
коррекции.
Как видно по ЛАХ и ЛФХ запасов по фазе и амплитуде нет,
следовательно, система неустойчива. Необходимо произвести коррекцию.
Будем делать коррекцию методом ЛАХ. Глядя на характеристики, можно
сделать вывод, что для коррекции необходимо ввести пропорциональное
звено и дифференцирующее, т.е. ПД-регулятор. Необходимо “сместить”
частоту среза влево, тогда увеличатся запасы как по фазе, так и по
амплитуде.
Wрег(p)=Крег
Необходимо “опустить” ЛАХ до того уровня, когда частота среза
примет значение, при котором запасы по фазе и амплитуде примут значения,
соответствующие устойчивой системе. Экспериментальным путем был
определен Крег=0,1 , при котором запас по фазе составляет 70,9 градусов, а
по амплитуде 16,6 дб.
Рис. 6
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Рис. 7
Рис.8. Переходный процесс скорректированной системы замкнутой
системы.
6. Корректирование системы
Напряжение с щеток R1 подается на бустерный усилитель К140УД17,
который
служит
потенциометр.
А
эмиттерным
затем
на
повторителем,
АЦП
чтобы
программируемого
не
нагружать
интегрального
микроконтроллера PIC18F4455. Микроконтроллер выполняет функции ПИДРазмещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
регулятора и формирует два сигнала ШИМ на выходах RB3/CCP2 и
RB4/CCP3. ШИМ сигналы необходимы для управления двухтактной
мостовой схемой, образованной полевыми транзисторами. Нагрузкой моста
является двигатель. Для обеспечения гальванической развязки и защиты
микроконтроллера
от
электромагнитных
помех,
вызванных
работой
двигателя, а также обеспечения надежного отпирания транзисторов,
управляющие сигналы проходят через оптронные драйверы Н11L1.
Для стабилизации напряжения для оптронных драйверов используем
импортный аналог отечественного стабилизатора напряжения КР142ЕН5А,
т.е. LM 417T.
ROC
+EП
VT1
R1
Uвых
VT2
- EП
Схема усилителя мощности.
Транзисторы выходного каскада усилителя подбираем так чтобы, их
предельный ток был больше пускового тока двигателя, I П 11,5 А . Ближайшее
значение предельного тока транзисторов 15 А, выбираем из них два :
VT1: КТ819БМ n-p-n, I БMAX 3А ; I КMAX 15 А ; 2 12 ; U КЭMAX 40В ;
U БЭMAX 5В
VT2: КТ818БМ p-n-p, I БMAX 3А ; I КMAX 15 А ; 1 12 ; U КЭMAX 40В ;
U БЭMAX 5В
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Максимальный расчётный ток базы VT1, VT2:
I БРасч12
IП
1
11,5
0,958 А
12
Операционный усилитель для усилителя мощности.
ОБЩЕЕ ОПИСАНИЕ:
К1460УД2Р – интегральная микросхема представляет собой сдвоенный
мощный операционный усилитель, пригодная для использования в качестве
мощного ОУ
в широком диапазоне областей применения, хорошо подходит для
управления индуктивными нагрузками, в частности, для управления
электродвигателями постоянного тока.
ОСОБЕННОСТИ:
Выходной ток до 1.0 А;
Скорость нарастания сигнала 1.3 B/мкС;
Выходное напряжение UВЫХ = 10 В;
Питание, как от однополярного, так и от двуполярного источников
питания;
Диапазон входных синфазных напряжений включает уровень земли;
Полоса пропускания 1.1 МГц;
Отсутствуют искажения типа “ступенька”;
Превосходный запас устойчивости по коэффициенту усиления и фазе;
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Внутренняя тепловая защита.
U ВЫХ _ MAX
ROC
I ВЫХ _ MAX , ROC
U ВЫХ _ MAX
I ВЫХ _ MAX
10
10 Ом.
1
Берем R1 36 103 Ом, откуда
ROC KU R1 2,5 36 103 90 103 Ом.
Номинальное напряжение на двигателе 27В, поэтому EП 27В .
Элементы:
R1:
C2-23, 2 Вт, 5%, 36К
Roc: C2-29в, 0,125 Вт, 0,1%, 89,80К
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Вывод
В данной работе была исследована упрощённая модель системы
сканирования поверхности и слежения по углу – не учитывалось сухое
трение, люфт редуктора и то, что корпус, находясь в воде, перемещается по
всем координатам, но даже с учетом всех упрощений можно сделать вывод:
- зная основы теории и систем автоматического управления, можно
спроектировать, практически, любую систему и реализовать ее на практике;
- при помощи средств и элементов электроники можно синтезировать
регулятор теоретически, а потом реализовать его на практике;
- с помощью простых средств коррекции – П-регулятор можно
существенно улучшить качество переходных процессов в системе.
- энергетические потери в системе зависят от качества переходных
процессов, поэтому уменьшение колебательности, способствует меньшим
энергопотерям и перегревам оборудования.
Информация, получаемая в процессе радиолокационного наблюдения,
называется
радиолокационной.
Радиотехнические
устройства
радиолокационного наблюдения называются радиолокационными станциями
(РЛС)
или
радиолокаторами.
Сами
же
объекты
радиолокационного
наблюдения именуются радиолокационными целями или просто целями. При
использовании отраженных радиоволн радиолокационными целями являются
любые неоднородности электрических параметров среды (диэлектрической и
магнитной проницаемостей, проводимости), в которой распространяется
первичная волна. Сюда относятся летательные аппараты (самолеты,
вертолеты, метеорологические зонды и др.), гидрометеоры (дождь, снег,
град, облака и т. д.), речные и морские суда, наземные объекты (строения,
автомобили, самолеты в аэропортах и др.), всевозможные военные объекты и
т. п. Особым видом радиолокационных целей являются астрономические
объекты.
В
гражданской
авиации
используют
Размещено на Vuzlit.ru
также
ряд
бортовых
Studlancer.net - закажи реферат, курсовую, диплом!
радиолокационных устройств. Сюда, прежде всего, относится ботовая РЛС
для обнаружения опасных метеообразований и препятствий. Обычно она же
служит для обзора земли с целью обеспечения возможности автономной
навигации по характерным наземным радиолокационным ориентирам.
В
Следящей
система
антенны
радиолокационной
станции
рассогласованием служит угловая ошибка между радиолокационным лучом и
направлением на цель; исполнительное устройство — электропривод
антенны.
Расчёт системы при её проектировании в целом основан на теории
автоматического регулирования и управления. Следящая система могут
иметь непрерывное управление (линейное, нелинейное) или дискретное
(релейное, импульсное, цифровое), что отражается на выборе метода
динамического расчёта. Кроме того, производится технический расчёт
каждого блока и элемента. Одна из главных целей динамического расчёта
Следящая система — синтез корректирующих устройств исходя из заданных
требований к качеству процесса управления.
Системы управления антенной. Антенна, расположенная в боевом
положении на крыше фургона, представляет собой сложное устройство
значительной массы. Для того, чтобы непрерывно определять угловые
координаты движущейся цели необходимо постоянно наводить антенну на
цель с большой точностью. Поэтому в состав системы управления антенной
входят
электронные
устройства,
обеспечивающие
высокую
точность
наведения и электромеханические устройства, обеспечивающие вращение
антенны по азимуту с достаточной угловой скоростью.
Это позволяет сопровождать по углам современные скоростные цели с
точностью, достаточной для прямого попадания артиллерийского снаряда в
цель.
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
Список использованной литературы
1. Бесекерский
Б.А.,
Попов
Е.П.
Теория
систем
автоматического
регулирования. М., "Наука", 1972.
2. Полупроводниковые элементы: Транзисторы. Справочник. Москва.
«Энергоатомиздат.» 1983г. – 904 с.
3. А.Б. Аренков. Печатные и пленочные элементы радиоэлектронной
аппаратуры.»Энергия»,Л,1971.302с.
4. Д.В.Васильев.В.Г. Чуич.Системы автоматического управления.»Высшая
школа»,1967.418с.
5. Справочник по электрическим машинам.: В2 т. Т.2/Под общ. ред.
И.П.Копылова, Б.К.Клюкова.-М.: Энергоатомиздат,1989-688с.:ил.
6. Электронные
колебаний:
устройства:
Лабораторный
Усилители.
Генераторы
практикум/Звягин
И.М.,
синусоидальных
Чернышук
В.А.;
Казан.авиац.ин-т.Казань,1992.108с.
7. [1] Расчет механических передач: руководство к курсовому проекту по
прикладной
механике
/
Авторы-составители
Г.И.Зайденштейн,
В.А.Черноглазов, В.Л.Юрьева. – Казань: КАИ, 1982.- 47 с.
8. [2] Расчет на прочность передач: Методическое руководство к курсовому
проекту по прикладной механике / Авторы-составители И.М.Митряев, В.И.
Девятов, В.П.Хорьков. – Казань: КАИ, 1982.-30 с.
9. [3] Элементы приборных устройств: Курсовое проектирование. Учебное
пособие для студентов вузов. В 2-х ч. Ч.2. Конструирование / Н.П.Нестерова,
А.П.Коваленко, О.Ф.Тищенко и др.; Под ред. О.Ф.Тищенко. – М.: Высш.
школа, 1978.-232 с., ил.
10. [4] Справочник конструктора-приборостроителя. Детали и механизмы
приборов / В.Л.Цитович, Л.Г.Юдовин. – Мн.: Высш. шк., 1990. – 440 с.: ил.
11. [5] Проектирование подшипниковых узлов. Примеры проектирования
опор валов механических передач: методические указания к курсовому
проектированию по деталям машин, основам конструирования и прикладной
Размещено на Vuzlit.ru
Studlancer.net - закажи реферат, курсовую, диплом!
механике / Казанский Государственный Технический Университет; Сост.
Г.И.Зайденштейн,
В.АЧерноглазов,
В.Л.Юрьева,
В.М.Демидович,
С.В.Егоров, Казань, 1995. 47 с.
12. [6] Проектирование подшипниковых узлов. Примеры проектирования
опор валов механических передач: методические указания к курсовому
проектированию по деталям машин, основам конструирования и прикладной
механике / Казанский Государственный Технический Университет; Сост.
Г.И.Зайденштейн,
В.АЧерноглазов,
В.Л.Юрьева,
В.М.Демидович,
С.В.Егоров, Казань, 1995. 32 с.
13. [7]
Курсовое
проектирование
механизмов
Г.И.Рощина. М: Высш. школа, 1991, 245с.
Размещено на Allbest.ru
Размещено на Vuzlit.ru
РЭС.
Под
редакцией