1 ПРОЦЕСС ПРОЕКТИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАНИЯ 1.1 МОДЕЛЬ ИЗДЕЛИЯ КЛАССА «ЧЁРНЫЙ ЯЩИК»
реклама

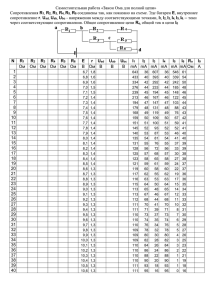
1 ПРОЦЕСС ПРОЕКТИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАНИЯ 1.1 МОДЕЛЬ ИЗДЕЛИЯ КЛАССА «ЧЁРНЫЙ ЯЩИК» Целевой функцией автоматизированного конструирования является разработка проектно-конструкторской документации технических объектов (ТО) с помощью методов и средств информатики и вычислительной техники. Разработка ведется этапами с постепенным переходом от абстрактных уровней описания ТО к более конкретным. На верхнем уровне абстрагирования ТО рассматривается как «черный ящик». Эта модель, вытекающая из общей модели технической системы преобразований, представлена на рисунке 1.1.1. Рисунок 1.1.1 – Общая модель технического объекта М – материя, Е – энергия, I – информация ТО связан с другими составными частями системы преобразований: операндами Od, людьми-операторами Н, смежными техническими системами TS и реальным окружением U. Операнды связаны с назначением ТО — осуществлять преобразование операндов из исходного состояния Odl в результирующее Od2. Различают четыре класса операндов : 1. Живые существа. Технический процесс изменяет состояние (болен — здоров) либо местоположение этих операндов, которые ввиду их специфичности и ограничений для данного класса операндов целесообразно выделять из класса материи. 2. Материя. В техническом процессе изменяются основные свойства или форма, размеры, местоположение и т.п. 3. Энергия. В техническом процессе различные виды энергии (энергоносители) преобразуются в другие виды, а также происходит изменение их свойств. 4. Информация. В техническом процессе изменяются форма, количество, качество и местоположение информации. ТО для своего функционирования нуждаются в управлении и обслуживании со стороны людей-операторов, выполняющих рабочие и (или) вспомогательные действия. ТО функционируют, как правило, в составе технических систем, включающих другие технические объекты и процессы, и осуществляют взаимодействие с ними. Все ТО имеют непосредственную или опосредованную связь с геосферой и другими естественными и искусственными системами. Помимо указанных нужных связей имеются и нежелательные и не всегда достаточно известные побочные воздействия окружения, называемые помехами. Функция технической системы определяется реализуемым в ней техническим процессом( ТеР), который может иметь весьма сложную структуру (рисунок 1.1.2). Функциональная и принципиальная схемы ТеР определяются операндами, которые требуется изменить. При этом обычно выделяют три стадии: подготовку, проведение и окончание. Технические процессы, связанные с переработкой материалов, энергии и информации, а также изготовлением ТО, принято относить к подклассу технологических процессов. Рисунок 1.1.2 – Схема технического процесса В ТеР операнд последовательно проходит ряд определенных промежуточных состояний. Изменение свойств операндов в нужном направлении происходит либо непрерывно, либо скачкообразно. ТеР складывается из подпроцессов и операций. Операцией называют элементарный процесс, соответствующий одному рабочему действию. ТеР должен охватывать рабочие операции с операндами, однако при этом целесообразно учитывать и вспомогательные операции. К операциям такого типа относят: • операции обслуживания, например смазывание, удаление стружки, охлаждение; • подготовительные операции, например закрепление детали, подведение суппорта; • операции по управлению и регулированию ТО, например измерение, наладка машины, изменение режима; • операции согласования, например соединение. Каждый ТеР включает также сопутствующие основному преобразованию побочные процессы (снабжение, управление производством и т.п.). При описании ТеР необходим полный перечень операндов с учетом балансов материальных, энергетических и.информационных потоков. Для реализации технического процесса преобразования операндов ТО выполняет определенные функции. Техническая функция — это способность системы при определенных условиях преобразовывать входную величину в требуемую выходную, обеспечивая определенное соответствие зависимой выходной величины от независимой (для данной функции) входной. Для реализации технических функций в состав ТО включаются определенные технические средства — исполнительные органы. Исполнительным органом (ИО) называется подсистема, реализующая определенную функцию ТО. Исполнительный орган, воспринимающий входной операнд, называется рецептором, а формирующий выходной операнд — эффектором, или рабочим органом (РО). 1.2 ПРОЦЕСС ПРОЕКТИРОВАНИЯ ИЗДЕЛИЯ 1.2.1 Этапы проектно – конструкторского процесса Исполнительные органы и отношения между ними физически реализуются в виде конструктивных элементов: деталей, узлов, сборочных единиц, комплексов. В зависимости от уровня используемых элементов (функциональных, описывается принципиальных, соответственно конструктивных) функциональной, структура принципиальной ТО и конструктивной схемами. Эти схемы соответствуют переходу от абстрактных к более конкретным уровням описания ТО. Процесс конкретизации завершается подготовкой рабочей документации, содержащей информацию, необходимую и достаточную для изготовления и эксплуатации ТО. Общий процесс проектирования оригинального ТО представлен на рисунке 1.2.1. Между этапами этого процесса имеется отношение «цель-средство». Рисунок 1.2.1 – Этапы проектно – конструкторского процесса Потребность в определенной системе (цель) реализуется посредством ТО, выполняющего определенные технические функции. Функциональная схема является средством реализации этих функций. Функциональная структура (как цель) может быть реализована различными принципиальными схемами (как средством). Принципиальные схемы (как цель) могут быть реализованы различными конструктивными схемами. Отношение «цель-средство» отражает процесс синтеза, при котором, исходя из поставленной цели разработки системы, можно найти средства, пригодные для ее достижения. Решение проектно-конструкторских задач на различных уровнях представления ТО вносит существенные различия в технико-экономические показатели (ТЭП) проектируемого объекта и в целом в дело технического прогресса в определенной области техники. Решение задач расчета параметров на уровне разработки рабочей документации улучшает ТЭП на 10...15%, задач выбора конструктивной схемы — на 20...30%, а принципиальной схемы — на 30...50%, а иногда и в несколько раз. Еще более важным являются изобретение и обоснование новых функциональных схем и технических функций. 1.2.2 Формализация определения потребности и технической функции ТО Перейдем к рассмотрению методов решения задач, возникающих на различных этапах проектирования и конструирования ТО на примере водометных движителей. Потребность в технической системе, как было отмечено выше, формализовано представляется формулой: P ( D, G , H ) Описание технической функции содержит следующую информацию: потребность, которую должно удовлетворить ТО; физическую операцию (превращение, преобразование), помощью которой реализуется потребность F ( P, Q ) где Р— потребность в ТО, Q - физическая операция. Q : Od 1 Od 2 Физическую операцию (ФО) формализовано представляют так: с Q ( At , E , Ct ) или Q ( At E Ct ) где At - входной поток, E - наименование операции Колера по превращению At в Ct , Ct - выходной поток. Под ФО понимают физическое преобразование заданного входного операнда (потока или фактора) в выходной (поток или фактор). Число входов At операций E и выходов Ct в общем случае произвольное. Список наименований пар операций Коллера приведен ниже: Прямая операция Обратная операция Излучение Поглощение Проводимость Изолирование Сбор Рассеяние Проведение Непроведение Преобразование Обратное реобразование Увеличение Уменьшение Изменение направления Обратное изменение направления Выравнивание Колебания Связь Прерывание Соединение Разъединение Объединение Разъединение Накопление Выдача Отображение Обратное отображение Фиксирование Расфиксирование Автоматическое формирование функциональных схем на основе использования известных физико-технических эффектов (ФТЭ) при поисковом конструировании может быть описано следующим соотношением: ( A, B, C ) или ( A B C ) где А – входной поток вещества, энергии или сигналов; С – выходной поток; В — физический объект, обеспечивающий или осуществляющий преобразование А в С. Под физико-техническими эффектами понимают приложение физических законов, закономерностей и следствий из них в технике. Список наименований потоков приведен ниже: Поток Электрическое поле Поток Электрический ток Количество теплоты Температура Тепловой поток Электрическое сопротивление Удельное электрическое сопротивление Деформация Поток электронов первичный Поток электронов вторичный Сила Ускорение Магнитная проницаемость Электромагнитное Поверхностная Намагниченность плотность электрического заряда Гравитационное поле Поток жидкости (газа) Давление Поляризованность Линейное ускорение Линейная скорость Угловое ускорение Угловая скорость Акустическая волна Показатель преломления Механическое напряжение Момент силы Электропроводность Прочность Длина волны Магнитная восприимчивость Плотность Предел текучести Модуль упругости Предел прочности Плотность излучение Температура плавления 1.2.3 Методика компьютеризации конструкторского проектирования Техническое задание на синтез функциональной схемы заключается в формировании таблиц исходных и выходных данных, которые содержат наименования входного и выходного потоков соответственно. Функциональная схема формируется в процессе работы планировщика при поиске допустимой последовательности МИЗ, выполняющей преобразование входной величины в выходную. Многовариантный планировщик может обеспечить формирование альтернативных функциональных схем. Рисунок 1.2.2 – Функциональная схема датчика 2 УМЕНЬШЕНИЕ ПАРАЗИТНЫХ ПОГРЕШНОСТЕЙ СОПРОТИВЛЕНИЙ ОТ И ВЛИЯНИЯ ПОМЕХ В ИЗМЕРИТЕЛЬНЫХ ЦЕПЯХ 2.1 ВЛИЯНИЕ СОПРОТИВЛЕНИЯ ЛИНИИ И УТЕЧЕК Измерительный преобразователь и элементы измерительной цепи в большинстве случаев пространственно разделены между собой и соединены линией в виде проводов или кабеля. Таким образом, при включении преобразователя последовательно с его сопротивлением Zi, включается сопротивление соединительных проводов и контактов Zл, а параллельно — сопротивление, определяемое токами утечки Zyт. Сопротивление Zл, имеет обычно последовательно включенные активную и индуктивную составляющие, а сопротивление Zyт — параллельно включенные активную и емкостную составляющие. При включении генераторного преобразователя (рисунок 2.1.1) Рисунок 2.1.1 – Генераторный преобразователь наличие сопротивлений Zл и Zут приводит к уменьшению выходного напряжения на сопротивлении RH измерительной цепи по сравнению с ЭДС Ех, так как: R Í Z óò U âûõ Å ( õ) Погрешность от ( R Í Z óò ) R Í Z óò Zi Z ë ( R Í Z óò ) наличия Zë 0 должна учитываться для преобразователей, обладающих относительно малым Zi (например, термопары), при работе с измерительной цепью с малым входным сопротивлением. Погрешность исключается при RÍ . Погрешность от наличия Z óò . должна учитываться для преобразователей, обладающих большим внутренним сопротивлением (например, пьезоэлектрические и гальванические преоб- разователи). При включении параметрического преобразователя, выходной величиной которого является Z(х), сопротивление, включаемое в измерительную цепь, из-за наличия Zл, и Zyт отличается от сопротивления преобразователя и составляет: Z 2.1.1 Уменьшение ( Z ( x) Z ë ) Z óò Z ( x) Z ë Z óò влияния сопротивления соединительных проводов и контактов Уменьшение влияния сопротивления соединительных проводов и контактов достигается в схеме четырехзажимного включения (рисунок 2.1.2). Рисунок 2.1.2 – Схема четырёхзажимного включения При такой схеме ток подводится к токовым зажимам 1 и 2, а падение напряжения на сопротивлении снимается с потенциальных зажимов 3 и 4. Токи Iт и Iп, текущие в токовой и потенциальной цепях, различаются на несколько порядков, и во столько же раз уменьшается падение напряжения на сопротивлениях проводов 3' и 4' по сравнению с проводами 1' и 2'. 2.1.2 Уменьшение влияния токов утечки Уменьшение влияния токов утечки достигается применением схемы эквипотенциальной защиты. Для этих целей изолятор, через который проходит проводник, разделяют дополнительным металлическим электродом, который присоединяют к точке измерительной цепи, имеющей потенциал, возможно близкий к потенциалу провода, проходящего через изолятор. В качестве примера рассмотрим схему включения микроамперметра (рисунок 2.1.3) для измерения тока через высокоомный резистор Ri. Рисунок 2.1.3 – Схема включения микроамперметра для измерения тока через высокоомный резистор При отсутствии защитного электрода ток через микроамперметр больше тока через резистор на величину I I óò Ua , где U a R0 I - падение напряRèç жения на резисторе, Rиз – сопротивление изоляции. Таким образом, относительная погрешность измерения тока составляет 1 погрешности изолятор разделяется защитным R0 . Для уменьшения этой Rèç электродом Э, который присоединяется к точке б. Тогда ток через микроамперметр отличается от тока через резистор на величину I Uá Ua , где ( U á U a ) - падение напряжения на Rèç микроамперметре, а Rèç - сопротивление изоляции между проводом и защитным электродом. В результате применения эквипотенциальной защиты погрешность измерения тока удается уменьшить в k Ua I раз. I U á U a Схема эквипотенциальной защиты широко применяется для уменьшения влияния емкости между кабелем и экраном, шунтирующей сопротивление преобразователя, подключаемого экранированным кабелем. 2.1.3 Термо – ЭДС и электрохимическая ЭДС Контур, соединительными оказывается образованный проводами и измерительным входом преобразователем, измерительной цепи, обычно составленным из раднородных материалов, между которыми при наличии температурного градиента возникает термо – ЭДС. Рисунок 2.1.4 – Контур из разнородных материалов В качестве примера на рисунке 2.1.4 показан резистор А, выполненный из константана и подключённый медными соединительными проводами В к измерительному прибору ИП, во внутренних соединениях которого, кроме меди В, использован марганин С. Контакты резистивного преобразователя R0 находятся при температурах 1 и 2 , остальная часть цепи – при температуре 0 . Термо – ЭДС цепи: å åÀ (1 ) åÂÑ ( 0 ) åÑ ( 0 ) åÂÀ ( 2 ) Если 2 1 , т.е. на резисторе имеется градиент температур, то: å åÀ ( 2 1 ) Влияние термо – ЭДС должно учитываться при питании измерительных цепей постоянным током. В преобразователях с переключающимся или скользящим контактом, например в реостатном преобразователе, где контакт перемещается по проводу, в преобразователях информационно-измерительных систем, опрашиваемых коммутатором, необходимо считаться и с возможностью появления электрохимической ЭДС. Атмосферная влага, растворяя пленки окислов на поверхности контакта, образует электролит, и в месте контакта возникает источник ЭДС, значение которой зависит от количества и природы электролита и материала контактов. Значение этой ЭДС может быть значительно снижено выбором материала контактов, в особенности их золочением, и сведено к нулю вакуумированием контактной группы. 2.1.4 Защита от влияния магнитных полей Рисунок 2.1.5 – Способы защиты от влияния магнитных полей Любая измерительная цепь с включенным в нее преобразователем образует контур. Если этот контур находится в переменном магнитном поле B Bm sin t , то в нем индуктируется ЭДС åèíä Âm s cos t , где s — площадь контура. Чтобы уменьшить эту ЭДС, нужно свести к минимуму площадь контура, например, как показано на рисунке 2.1.5(а) , и, если возможно, участки контура, находящиеся в магнитном поле, экранировать. Экраном для преобразователя служит стальной корпус, толщина d которого, чтобы создать эффективную защиту, должна быть не менее d 2 z 0.05 . Индуктируемую в рабочем контуре ЭДС еинд можно компенсировать, включив навстречу ей ЭДС ек, наводимую в специально сделанной компенсационной петле или обмотке (рисунок 2.1.5(б)); однако непременным условием при этом является крепление всех проводов измерительного контура, чтобы площадь контура оставалась неизменной. Жесткое крепление контура и окружающих его элементов необходимо также потому, что при движении элементов в магнитных полях может изменяться потоко-сцепление ê с измерительным контуром, что приводит к появлению ЭДС даже в постоянном магнитном поле. Например, при движении провода в магнитном поле в нем, как известно, индуктируется ЭДС e v B L ; где В–индукция, L—длина провода и v — скорость его движения. При вибрации отдельных участков контура эта помеха может оказаться весьма существенной. 3 ЗАЩИТА ОТ ВЛИЯНИЯ ЭЛЕКТРИЧЕСКИХ ПОЛЕЙ ЭЛЕКТРИЧЕКОЕ 3.1 ПОЛЕ, СОЗДАВАЕМОЕ ПОСТОРОННИМИ ИСТОЧНИКАМИ ЭНЕРГИИ Электрическое поле, создаваемое посторонними источниками энергии; как показано на рисунке 3.1.1 (а). Рисунок 3.1.1. – (а) – Токи в проводах измерительного контура (б) – Защита электростатическими экранами (в) – Эквивалентная схема цепи (б) наводит токи в проводах измерительного сопротивления связи Z’ , Z’’, Z ’’’ контура. Эти токи через и ZIV замыкаются на землю. Поскольку паразитные сопротивления, как правило, значительно больше сопротивлений измерительного контура, то источник помехи для рассматриваемого контура можно считать источником заданного тока iэ. Тогда наведённая в контуре ЭДС åý iý Z i RÍ Z i RÍ Ток iэ будет тем больше, чем больше длина линии (антенны), соединяющей преобразователь и измерительную цепь, и чем выше частота источника помехи, так как сопротивления связи, задающие ток, как правило, определяются паразитными емкостями и, следовательно, уменьшаются с ростом частоты. ЭДС еэ при прочих равных условиях будет тем больше, чем больше сопротивление параллельного соединения Zi и RН; поэтому наведенная ЭДС — наводка — проявляется обычно в цепях с относительно высокоомными преобразователями. Для уменьшения наводок все соединительные провода, сам преобразователь и измерительная цепь защищаются электростатическими экранами, как показано на рисунке 3.1.1(б). При использовании экранированных проводов следует иметь в виду, что они. имеют относительно большую емкость между жилой и экраном (70— 150 пФ/м), вследствие чего уменьшаются сопротивления Z1э и Z2э между жилами 1 и 2 и точкой, к которой присоединяется экран. Кроме того, экран вследствие протяженности линии имеет весьма существенную связь с землей, при присоединении экрана к корпусу преобразователя или измерительной цепи емкость экран — земля Сэ.з шунтирует соответствующее сопротивление связи. Поэтому вопрос о присоединении экрана к корпусу преобразователя или измерительной цепи решается исходя из конкретных условий так, чтобы влияние шунтирующих емкостей было минимальным. Однако чаще экран присоединяется к корпусу измерительной цепи. Корпус преобразователя и корпус измерительной цепи имеют обычно относительно небольшие сопротивления связи Zпр.з и Zизм.з относительно земли. В ряде случаев по условиям эксперимента или по соображениям техники безопасности один из корпусов или оба должны быть заземлены, тогда сопротивления связи определяются сопротивлениями заземляющих проводников и очень малы. Однако даже при отсутствии искусственного заземления корпус преобразователя почти всегда связан с землей через проводящие детали объекта, на котором он монтируется, а корпус измерительной цепи, включающей усилитель, — через емкостные связи и источники питания. Эквивалентная схема цепи (рисунок 3.1.1, б) показана на рисунке 3.1.1 (в). В этой схеме учтены сопротивления связи Z'пр и Z"пр преобразователя с корпусом, сопротивления связи Z’изм и Z’’изм измерительной цепи с корпусом, сопротивления связи Z1э и Z2э проводов с окружающим их экраном, сопротивления связи Zпр.з, Zэ.з и Zизм.з с землёй, сопротивления проводов r1 и r2 и шины rш , соединяющей экраны, и сопротивление r0 земли между точками а и б. 3.2 ПОМЕХА ОБЩЕГО ВИДА 3.2.1 Наличие помехи общего вида Наличие сопротивлений связи с землей приводит к появлению на входе измерительной цепи составляющей помехи общего вида, называемой также продольной помехой. Механизм действия продольной помехи поясняется на рисунке 3.1.1 (б, в). Рисунок 3.2.1 – (а) – Термоэлектрический термометр (б) – Эквивалентная схема термометра (в) – Упрощённая эквивалентная схема Из-за блуждающих токов и токов заземленных силовых установок потенциалы точек а и б оказываются различными, причем эта разница может достигать 10—15В. Разность потенциалов Uaб в эквивалентной схеме (рисунок 3.1.1,в) учитывается включением источника продольной помехи Uп. По эквивалентной схеме можно найти составляющую помехи Uвх.п, попадающую на вход измерительной цепи, т. е. на сопротивление RН. Очевидно, худшим будет случай, когда сопротивления связи с землей Zпр.з и Zизм.з будут равны нулю. Поэтому, рассматривая действие помехи, обычно вводят источник Uп прямо в общую шину rш, условно называя ее «землей». Помеху, действующую на входе измерительной цепи, рассмотрим на примере термоэлектрического термометра (рисунок 3.2.1, а), состоящего из термопары, линии связи и усилителя с входным сопротивлением RН. Экран линии связи соединен с корпусом усилителя, вход усилителя заземлен. Эквивалентная схема термометра представлена на рисунке 3.2.1, б. Учитывая, что сопротивления Z’пр и Z’’пр намного больше сопротивления термопары Ri и эквивалентного сопротивления «земли» r0, и заменив параллельное соединение сопротивлений RН и Z’’изм сопротивлением R’Н, эквивалентную схему можно упростить, как показано на рисунке 3.2.1, в. По этой схеме легко определить составляющую помехи, попадающей на вход, как: U ÂÕ. Ï R r2 i UÏ 2 ' RH' Z ïð RH Ri r1 r2 Из этого выражения видно, что помеха будет тем меньше, чем больше сопротивление связи Zпр между корпусом и преобразователем и чем меньше сопротивление линии и внутреннее сопротивление преобразователя. Весьма эффективное действие на уменьшение помехи, особенно для преобразователей с большим внутренним сопротивлением, оказывает симметрирование входной цепи. Симметричная входная цепь показана на рисунке 3.2.2 (а), эквивалентная схема цепи – 3.2.2 (б). Если учесть, что сопротивления R1 и Z’’изм и R2 и Z’изм соединены параллельно и заменить их сопротивлениями Z’1 и Z’2 соответственно, а соединение сопротивлений Zi , Z’пр и Z’’пр треугольником заменить соединением звездой, то эквивалентную схему можно представить так, как показано на рисунке 3.2.2 (в). Рисунок 3.2.2. – (а) – Симметричная входная цепь (б) – Эквивалентная схема цепи (в)–Упрощённая эквивалентная схема Как видно из этой схемы, напряжение помехи подается на диагональ аб мостовой цепи, входное напряжение снимается с диагонали вг. При выполнении условия равновесия моста (Z ä r1 ) Z 2 (Z å r2 ) Z1 0 составляющая напряжения U âã , создаваемая источником Uп, равна нулю и помеха полностью подавляется. Подставив значения сопротивлений Zд и Zе и перегруппировав члены последнего уравнения, получим условие равновесия в виде: Z i Z ïð Z 2 Z ïð Z1 Z ïð Z ïð r1 Z 2 r2 Z 1 0 Полного помехоподавления можно добиться при идеальной симметрии Z èçì , r1 r2 и R1 R2 . При несимметрии схемы схемы, т. е. при Z ïð Z ïð , Z èçì уменьшают продольную помеху регулировкой сопротивлений. Однако при этом следует иметь в виду, что уравнение равновесия в общем виде включает в себя и Z èçì как действительную, так и мнимую части (сопротивления Z ïð , Z ïð , Z èçì имеют обычно емкостную составляющую) и добиться его выполнения, т. е. полного помехоподавления, регулировкой лишь одного сопротивления не удается. 4 ОРГАНИЗАЦИЯ В СТРУКТУРЕ ПРЕОБРАЗОВАТЕЛЯ ДОПОЛНИТЕЛЬНОГО ИЗМЕРИТЕЛЬНОГО КАНАЛА 4.1 ПОНЯТИЕ О ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЯХ 4.1.1 Недостатки практического применения ИП Рассмотренные ИП являются одноканальными и имеют недостатки, существенно ограничивающие области их практического применения: 1) нелинейность функций преобразования; 2) чувствительность к нестабильности питания; 3) наличие на выходе постоянной неинформативной составляющей; 4) чувствительность к воздействию внешних факторов; 5) наличие погрешности от старения элементов; Следующий способ проектирования основан на организации в структуре преобразователя дополнительного канала, “симметричного” с основным исходной относительно нелинейной составляющей функции преобразования, и “ассиметричного” относительно информативной измеряемой величины и простого алгебраического преобразования полученные в результате сигнала. 1 f1 ( x, ); 2 f 2 ( x, ); x F (12 ) Критерием эффективности операции линефизации двухканального ИП служит строгое выполнение тождества: F f1 и dF * df1 dF * df 2 0 df1 * d df 2 * d f2 – функции преобразования основного и дополнительного измерит. каналов; F – результирующая функция; - нелинейная составляющая, входящая в f1 и f; Х- информативная измеряемая величина. Критерием абсолютной инвариантности ИП относительно нестабильности параметров входящих в них элементов служит тождественное выполнение равенства: Fi q j dFi * df q df q * qK qj K qj 0 fq – функция преобразования q-го измерительного канала i-го измерительного преобразователя; Кq j – отклонение параметра Кq j j-го элемента q-го канала преобразователя от номинального значения в результате воздействия дестабилизирующих факторов. 4.2 ПАРАМЕТРИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ 4.2.1 Параметрические измерительные преобразователи в составе неравновесных измерительных мостов. U*2 3 Е U2 4 7 F 5 U*1 6 1 U1 2 1- 4 - четыре преобразователя, из которых 1- первичный; 5- источник питания; 6 и 7-повторители (масштаб.усил.) с высоким входным сопротивлениям; 8-устройство деления. Рисунок 4.2.1- Параметрический измерительный преобразователь в составе неравновесных измерительных мостов. Функции преобразования каналов: U*1=К1U1; U*2=К2U2 , где К1 и К2 – коэффициенты передачи повторителей 6 и 7; U 1 и U2 – сигналы на их входах; U1 E z1 z 4 z 2 z 3 z 4 z ; z 2 z 4 z3 z1 z U2 Ez3 ; z 3 z1 z где z1 и z - начальное значение и измерение информативного параметра преобразователя 1; z2, z3 и z4 – параметры преобразователя 2,3 и 4. Результирующая функция преобразования будет линейна во всем диапазоне и не зависит от измерения источника питания 5. F1 K1 z1 z 4 z 2 z 3 z 4 z ; K2 z 3 z 2 z 4 где F1=U1*/U2* сигнал на выходе устройства деления. При К1=К2 и z1=z2=z3=z4 – функции преобразования упрощается и имеет вид: F1= z /(2z). Источник погрешности любого ИП является нестабильность всех входящих в него элементов. Поэтому в целом для измерительной цепи нельзя абсолютно точно удовлетворить критерий инвариантности из-за технологич. разброса параметров комплект. элементов и невозможности выполнения требований, предъявляемых к монтажу и идеального сборке самих преобразователей. Поэтому требования к технологии построения квазиинвариантных ИП, которые не могут быть удовлетворены конструктивно и схемотехнически, для каждой конкретной схемы связано со значением какие элементы использовать в схеме, как их расположить в пространстве, какие и как подключить источники питания и т.д. 4.2.2 Параметрические измерительные преобразователи в составе параллельно-симметричных мостов Рассмотрим параллельно-симметричный мост с двумя рабочими плечами, когда первичные измерительные преобразователи 1 и 2 включают в дифференциальную суммирующие преобразующие цепи; выделяют сигналы, пропорциональные разности и сумме и делят первую на вторую. 5 U2 3 U1 1 U*2 U2 4 6 8 F2 9 U*1 7 2 Рисунок 4.2.2 – Параметрический измерительный преобразователь в составе параллельно-симметричных мостов Напряжение, пропорциональное разности токов в преобразователях 1и 2, традиционно сменяется с измерительной диагонали моста, образованного преобразователями 1-4, а напряжение пропорциональное сумме названных токов, с зажимов преобразователя 5, включенного с источником питания 6. При равенстве параметров преобразователей 3,4,5: z3 = z4 = z5 = z – на зажимах преобразователя 5 получаем z*i=z(i1+i2), где i – ток в диагонали питания; i1 и i2 – токи в плечах. Тем самым обеспечивается второй измерительный канал, “симметричный ” с первым относительно нелинейной составляющей в исходной функции преобразования. Напряжение на входах диф. усилителей 7 и 8 при высоком входном сопротивлении последних будут: U1 U2 E z5i z1 z z 4 z 2 z z3 ; z1 z z 3 z 2 z z 4 E z5i z1 z z 2 z z3 z 4 ; z1 z z 3 z 2 z z 4 где Е- ЭДС источника питания 6; z1 параметров первичных преобразователей 1 и 2; и z2 – начальные значения z – информативное изменение параметров z1 и z2. В итоге на выходе устройства деления 9 получаем функцию преобразования F2 = U*1 / U*2 : F2 При К1=К2; K1 z1 z z 4 z 2 z z 3 ; K 2 z1 z ( z 2 z ) z 3 z 4 z3=z4=z5=z получаем F2= z /(z0+z); т.е. z1=z2=z0; результирующая функция преобразования ИМ инвариантна относительно нестабильности параметров источника питания и линейна во всем диапазоне изменения информац. параметров. Для моста с 4-мя рабочими плечами функция преобразования имеет вид F3= z/z. Измерительные 4.2.3 делители напряжения с линейными функциями преобразования. 5 U*2 7 2 Е r1 3 1 r3 U*1 r2 6 4 Рисунок 4.2.3 - Измерительный делитель напряжения с линейными функциями преобразования. На рисунке 4.2.3 изображен двухканальный делитель напряжения с дополнительным сумматором в цепи одного из каналов. Схема содержит первичный измерительный преобразователь 1; ИП с постоянными параметрами 2, источник питания 3, два повторителя напряжения 4 и 5, которые необходимы для развязки по току; сумматор 6 и устройства деления 7. Сумматор 6 использован для компенсации постоянной неинформативной составляющей сигнала. Напряжение на входах устройства деления 7 описывается выражениями: U1 * Erk1r1 z1 z k 2 r2 Ek 2 z 2 * ; U1 ; z1 z z 2 r1r2 z1 z z 2 где к1 и к2 – коэффициенты передачи но напряжению повторителя 4 и 5 . На выходе устройства деления получаем: * F u при k1 k 2 ; U1 U2 * r3 k1r1 z1 z k 2 r2 z 2 ; k 2 r1r2 z 3 z1 z 2 z имеем r1 r2 r ; Fu zr3 /( ri z ); т.е. преобразования ИП линейна во всем диапазоне измерений z и не содержит постоянной неинформативной составляющей. 4 r1 6 U*2 r4 1 7 2 r5 3 r7 r6 5 U*1 r8 Рисунок 4.2.4 - Схема с дифференциальным включением преобразователя. Схема содержит дифференциальный ПИ 1; источник питания 2; повторители 3 и 4 с высоким входным сопротивлением; сумматор 5; дифференциальный усилитель 6 и устройство деления 7. В данной схеме сигнал пропорциональный сумме, делится на сигнал, пропорциональный разности сигналов с выходом соответствующих каналов преобразователя. Это обеспечено введением перекрестных ОС. В результате на выходе сумматора получаем разность, а на входе диф. усилителя – сумму сигналов U 1 K1 E1 * z z ; 2z U 2 K 2 E1 * z z ; 2z К1 и К2 – коэффициенты передачи по напряжению преобразователей 3 и 4 (К1 = К2 =1). Коэф. передачи по напряжению сумматора 5 и диф. усилителя 6 приняты равными единице, т.е. r1 = r 2= r3 = r4 = r5 = r6 = r7. Функция преобразования U 2 U1 * F5 U 2 U1 * * * z z абсолютно инвариантна относительно нестабильности параметров источника питания z и не содержит неинформативной составляющей. Из перечисленного выше сформулируем основные технологические особенности их изготовления: 1) активные преобразователи(повторители напряжения, дифференциальные усилители, сумматоры, масштабные усилители ) должны быть построены на основе одинаковых операционных усилителей, взятых из одной партии; 2) при наличии навесных элементов однотипные элементы должны быть одной марки (т.е. выполнены из одного и того же материала) и также взяты из одной партии. 3) Питание активных преобразователей, установленных в параллельных измерительных каналах, должны быть общим; Все элементы и блоки должны находится в идентичных условиях относительно любых возмущающих воздействий. 5 МЕТОДЫ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ 5.1 ВВЕДЕНИЕ. ОСНОВНЫЕ ПОЛОЖЕНИЯ И ОПРЕДЕЛЕНИЯ Уменьшение погрешности основано на выполнении вспомогательных операций в процессе измерения и, следовательно, избыточности ИП по быстродействию, или программной избыточности для числовых приборов. Различают следующие виды коррекции погрешностей: калибровка аддитивная мультипликативная способом итерации 5.2. ВИДЫ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ 5.2.1 Калибровки с образцовым источником сигналов Х 1 S1 1 СИ S2 2 У 2 БУ СС U0 Рисунок 5.2.1 – Калибровки с образцовым источником сигналов Если прибор имеет аддитивную и мультипликативную bx составляющие погрешности, то его выходной сигнал y ax bx На рисунке 5.2.1 U0 – источник образцовых сигналов, БУ – блок управления, СС – схема сравнения, S1 и S2 – переключатели, СИ – средство измерения или измерительный преобразователь. В положении 2 переключателями S1 и S2 осуществляется калибровка. На вход СИ и СС подаётся нулевой сигнал, тогда исключается аддитивная погрешность: y a0 b0 Если 0 блок БУ изменяет параметры СИ, устраняя эту погрешность путём установления нулевого выходного сигнала, тогда исключается мультипликативная погрешность: y ax bx Затем на вход СИ подаётся сигнал x0 0 , а на вход СС – сигнал y 0 , соответствующий этому входному сигналу в идеальной СИ, тогда: y ax0 bx0 Далее с помощью БУ регулируется передаточный коэффициент СИ до величины a a b путём установления на выходе СИ сигнала, равного y 0 . После чего переключатели S1 и S2 устанавливаются в положение 1 и на вход СИ поступает измеряемый сигнал, тогда: y (a b) x bx ax Т. е. выходной сигнал реального СИ будет равен выходному сигналу идеального СИ с точностью до погрешностей калибровки. 5.2.2 Аддитивная коррекция При аддитивной коррекции (АК) уменьшение погрешности осуществляется за счёт смещения функции преобразования. Для выявления погрешности, как правило, используется образцовый обратный преобразователь ОП, поскольку его просто построить. У1 Х У + СИ ∑ + _ Хоп ∑ ОП _ ΔХ У2 ВК Рисунок 5.2.2 – Образцовый обратный преобразователь Операция выделения сигнала погрешности x происходит в результате одновременного получения и вычитания двух сигналов – входного x и x îï на выходе ОП. Усиленный вспомогательным сигналом ВК разностный сигнал y 2 используется для введения поправки в результате измерения. Если СИ имеет аддитивную и мультипликативную погрешности и его выходной сигнал: y1 aíîì x bx а обратный образцовый преобразователь имеет идеальную характеристику преобразователя вида: xîï y1 a íîì то, õîï à íîì1 (à íîì õ bx) õ x x xîï à íîì à íîì bx , à íîì bõ à íîì Пусть ВК тоже не идеален, но имеет такие же составляющие погрешности, как и СИ с корректируемыми параметрами: õ bx y 2 aíîì Далее находим сумму y1 и y 2 : a aíîì b b b y y1 y 2 x aíîì b(1 íîì ) ) (1 àíîì àíîì àíîì àíîì Из выражения видно, что для получения малой остаточной погрешности СИ со скорректированными параметрами необходимо иметь малую аддитивную погрешность ВК и равенство номинальных передаточных коэффициентов ВК и СИ. В этом случае y aíîì õ и в СИ будет осуществляться полная коррекция погрешностей. 5.2.3 Мультипликативная коррекция При мультипликативной коррекции (МК) осуществляется выделение погрешности преобразователя и регулирование коэффициента преобразования ИП с целью мин6имизации этой погрешности. У х СИ z + Δх ∑ ВК - хоп ОП Рисунок 5.2.3 – Преобразователь СИ Пусть характеристика преобразования СИ имеет вид: y a kzx где kz - изменение коэффициента преобразования СИ под действием сигнала z ; - аддитивная погрешность. Тогда y; xîï àíîì ó; x x xîï õ àíîì z k íîì õ bõ k íîì õ à íîì1 ó b x à íîì1 ó где и b - аддитивная и мультипликативная погрешности ВК. Подставив в выражение для y значение z, окончательно получаем: y y a íîì õ k k íîì bx 2 a k x à a íîì õ íîì a k 1 k íîì k x 1 kaíîì k íîì bx Из соотношений видно, что для уменьшения погрешности необходимо увеличивать коэффициент передачи канала ВК. При k íîì имеем y 0 . 5.2.4 Коррекция способом итераций Этот способ требует наличия избыточности преобразователя по быстродействию, а для своей реализации – структурной избыточности. Х 1 S Ур У СИ ВУ 2 Хоп ОП Рисунок 5.2.4 – Преобразователь для коррекции способом итераций где – ВУ – вычислительное устройство. В положении 1 переключателя S осуществляется измерение входной величины x , а в положении 2 – измерение x îï - выходного сигнала ОП. Пусть результатом первого измерения будет величина: ó0 àíîì õ bx , тогда результатом первого обратного преобразования: õîï 1 õ à íîì1 ( bx) и, следовательно: ó1 à íîì õîï 1 bxîï 1 (à íîì 2b b2 b ) x (2 ) à íîì à íîì В блоке ВУ вычисляется разность первого и второго измерения y1 y1 y 0 bx ba íîì1 ( bx) и запоминается, а переключатель S снова подключается на вход СИ измеряя величину x , и получают следующий результат измерения ó2 , после чего вносят первую поправку (итерацию) и получают: ó2 à íîì õ b a íîì ( bx) Снова преобразуют и измеряют õîï 2 à íîì1 ó3 õ ba íîì2 ( bx) y 4 a íîì õ bx ba íîì1 ( bx) b 2 a íîì2 ( bx) Вычисляют вторую поправку и запоминают в ВУ: b ó2 y 4 y 3 bx a íîì 2 bx И вторая итерация: y5 y 4 y 2 и так далее. После n итераций будем иметь результат измерения в виде: y n a íîì видно, что при b a íîì b 1 lim a íîì n→∞ b õ a íîì n n bx 0 и y n aíîì õ . 5.3 КОРРЕКЦИЯ С ПОМОЩЬЮ ОБРАЗЦОВЫХ СИГНАЛОВ 5.3.1 Общие положения Для практической реализации этого способа необходимо иметь избыточность ИП по быстродействию и набор образцовых сигналов. Х У Х01 СИ К ВУ Х02 Рисунок 5.3.1 – Схема для коррекции с помощью образцовых сигналов где К – коммутатор, подключающий измерительную величину x и образцовые сигналы x 01 , x 02 и т.д. Для 1-го, 2-го и 3-го измерений можно записать: y1 a1 a2 x y 2 a1 a2 x01 y3 a1 a2 x02 где à1 , à 2 - коэффициенты преобразования СИ. Решив систему уравнений, находят значение входной величины x: x x01 Такой способ y3 y1 y y2 x02 1 y3 y 2 y3 y 2 уменьшает как аддитивную, мультипликативную составляющие погрешности СИ. 5.3.2 Уменьшение динамической погрешности так и Коррекция погрешности при динамических измерениях сводится к восстановлению входного сигнала по зарегистрированному выходному, для линейных ИП по соотношению: t y(t ) g (t ) x( )dt h(t ) , 0 где g (t ) - весовая функция (импульсная характеристика) СИ, h(t ) - помеха, действующая на выходе СИ. Одним из приёмов является способ с последовательным включением корректирующих устройств. Х(t) Х*(t) У(t) G1(S) G2(S) Рисунок 5.3.2 – Схема для уменьшения динамической погрешности где G1 (S ) и G2 (S ) - передаточные функции корректирующего СИ и корректирующего преобразователя. Результирующая передаточная функция этого соединения: G (S ) G1 (S ) G2 (S ) Если G2 (S ) Ê íîì , то G ( S ) Ê íîì G1 ( S ) и теоретически СИ не будет иметь динамической погрешности. Переходная функция корректирующего звена при этом должна быть в виде: G2* ( S ) Ê íîì 1 G1 ( S ) 1 TK S 1 где γ выбирают так, чтобы у функции G2* (S ) число нулей не превышало число плюсов. При Tk коррекция приближается к идеальной и улучшение динамической характеристики СИ ограничивается лишь помехами. В процессорных измерительных средствах корректирование можно осуществить программным способом. 5.3.3 Повышение помехоустойчивости измерительных преобразователей Различные приборы и узлы приборов работают в непосредственной близости друг от друга и возрастает их взаимное отрицательное влияние, кроме того, всё больше схем сосредотачиваются в мелком объёме, что приводит к увеличению взаимных помех. На аппаратуру не должны оказывать влияние источники внешних шумов и сами они не должны являться источниками шума. Выделяют 2 класса методов уменьшения или устранения взаимных помех. К первому классу относятся инструментальные методы: экранирование заземление балансировка изоляция разнесение и ориентация регулировка значения полного сопротивления схемы выбор кабеля и т.д. Ко второму классу относят алгоритмические методы: линейная и нелинейная фильтрация отбраковка аномальных измерений и др. 6 ГРАДУИРОВКА И КАЛИБРОВКА СРЕДСТВ ИЗМЕРЕНИЙ 6.1 ПОНЯТИЕ О ГРАДУИРОВКЕ И КАЛИБРОВКЕ 6.1.1 Понятие о градуировке В измерительной практике широко распространены задачи построения ГХ средств измерений. При передаче размеров единиц метод градуировке обеспечивает наименьшую потерю точности, и в некоторых случаях только этот метод может обеспечить требуемую точность поверяемых средств измерений. Поэтому он довольно распространен при передаче размеров единиц на верхних ступенях поверочных схем и при исследовании высокоточных средств измерений. В настоящее время градуировка приобретает все большое значение. Измерительному прибору или преобразователю соответствует определенная функциональная зависимость между входной величиной Х и выходной величиной : f и ( Х ), которая называется истинной функцией преобразования. Истинная функция преобразования может изменяться во времени (в зависимости от изменения внешних условий или свойств средства измерений ): f и ( Х , t ). Определяя экспериментально зависимость между величинами на входе и выходе изучаемого средства измерений, получают зависимость f ( Х ), которая измерений. называется Процедура градуировочной определения характеристикой (построения) средства градуировочной характеристики называется градуировкой средства измерений. 6.1.2 Понятие о калибровке При построении ГХ выполняют современные измерения величин на входе и выходе. Обычно измеряют несколько входных величин Х1,…Хm и соответствующие выходные величины 1 ,..., m , где i f и ( Х i ). Таким образом , получают набор результатов измерений ( хi , yi ), i 1...m. По этим экспериментальным данным строят ГХ . Полученную ГХ фиксируют и затем используют для оценивания значений входных величин по выходным. ГХ средства измерений может быть представлена в аналитическом виде (формулой), либо в виде графика или таблицы. Выбор способа задания ГХ зависит от способа использования средства измерений и сложности ГХ. Обычно предпочитают иметь ГХ, заданную формулой, причем возможности более простого вида. Эта форма представления ГХ наиболее универсальна и характерна для многих практических задач. Если истинную функцию преобразования нельзя аппроксимировать простой функцией, то приходится задавать ГХ с помощью графика или таблицы. Если ГХ задается таблицей ( хi , yi ) i=1…m., то при ее составлении лишь выполняют обработку результатов наблюдений в каждой точке – для входной величины хi и соответствующей выходной величины i порознь (по обычным правилам обработки результатов наблюдений при прямых и косвенных измерениях, причем нет дополнительной обработки набора экспериментальных данных в целом). Если ГХ задается в аналитической форме, то кроме обработки наблюдений в каждой точке, необходима дополнительная обработка всего набора экспериментальных данных ( хi , yi ) i=1…m. При этом предполагается , что ГХ имеет не очень сложный функциональный вид и зависит от небольшого числа параметров. Для ГХ, заданной графически, возможны 2 варианта. В первом случае может выполнятся лишь обработка наблюдений для каждой из реперных точек ( хi , yi ) i=1…m; далее в промежуточных точках зависимость может определятся путем итнерполяции или каким-либо другим способом. Во втором случае график строится со сглаживанием. Если при этом ориентируются на определенный функциональный вид зависимости, то задача близка к построению ГХ в аналитической форме( и оценивание погрешностей выполняется также). Отметим, что иногда сглаживание выполняется эмпирически, “на глаз ”, тогда может быть получена удовлетворительная ГХ, но оценить ее погрешности затруднительно. 6.1.3 Группы задач градуировки Таким образом, по способу построения ГХ (методом обработки наблюдений ) можно выделить две группы задач градуировки: 1. Градуировка в отдельных точках ( построение ГХ в виде таблицы, или графика без сглаживания, определение поправок к показаниям измерительного прибора в задданых точках шкалы или к значениям отдельных мер). 2. Построение градуировочных характеристик в аналитическом виде ( построение ГХ в виде формулы или графика со сглаживанием). К задачам градуировки во многом близки задачи калибровки средств измерений. При калибровке набора мер или шкалы измерительного прибора определяют ряд значений набора мер или поправок для точек шкалы прибора путем совокупных измерений, т.е. путем измерений или сравнений друг с другом в различных сочетаниях отдельных мер или отдельных участков шкалы. Отметим , что методы калибровки и градуировки сходны между собой. До Недавнего времени совокупные измерения ( к которым сводится калибровка) объединялись в одну категорию с совместными измерениями ( к которым сводится измерение ГХ). Поэтому целесообразно рассматривать задачи калибровки наряду с выделенными выше 2-мя группами задач градуировки, причем по сложности они занимают промежуточное положение. Следовательно, можно рассматривать 3 группы задач( в порядке возрастания сложности): 1) Градуировка в отдельных точках. 2) Калибровка. 3) Построение ГХ в аналитическом виде. Наиболее просты задачи первой группы, которые сводятся к прямым или косвенным измерениям. Задачи второй группы сводятся к совокупным измерениям, а третьей – к совместным (см. табл.1) Таблица 6.1 - Классификация градуировочных характеристик Форма представления Обработка экспериментальных.данных Вид зависимости Таблица График График Прямые или косвенные измерения Произвольная в Без сглаживания точках* Со сглаживанием Формула (аналитический вид) Совместные измерения ** Линейная Совместные измерения ** нелинейная Приводимая к линейной Полином Сплайн Более сложного вида *- без дополнительной обработке результатов в разных точках. **- прямые и косвенные измерения в точках и дополнилельная обрабокта набора результатов. В данной книге рассматривается преимущественно последняя группа задач – построение ГХ в аналитическом виде, так как она наиболее важна для практики и наименее исследована. Однако для полноты изложения, Сопоставления и выявления особенностей каждой группы задач в книге кратко изложены также основные сведения о градуировке в отдельных точках и калибровке. На практике обычно рассматривают ГХ , представленные формулами простого вида. Наиболее распространенными является линейные ГХ: а bX . Линейные ГХ наиболее распространены и удобны на практике. В большинстве случаев бывает желательна именно линейная ГХ. Лишь если истинная зависимость существенно отличается от линейной, ищут более сложную зависимость. Встречаются также и нелинейные ГХ, например, функциональные измерительные преобразователи могут иметь квадратичную ГХ - аX 2 , или логарифмическую ГХ - а lg X 2 . Нелинейные ГХ, встречаются в измерительной практике , можно разбить на 2 1) функция f сводится к линейной функции: У = а+ЬХ с помощью замены переменных Х= (X), У = (У); 2)функция f является линейной комбинацией известных функций л f(X) = a j 1 j j (X), где функции 1 ,…, К - известны, а параметры а1 ,…, ak подлежат определению. Из функций первой группы наиболее часто встречаются показательные', степен рациональные. Из функций второй группы следует отметить алгебраические , причем степень полинома, как правило, невысока ( =2…6), а также тригонометрические полиномы. Кроме того, следует выделить тот практически важный случай, когда функциональная зависимость задается разными аналитическими выражениями (возможно, разного функционального вида) на нескольких поддиапазонах изменения входной величины Такие зависимости обычно называют сплайнами. Чаще всего рассматривают полиноминальные сплайны, которые на каждом поддиапазоне можно представить полиномами, а в граничных точках они непрерывны. поли 6.2 ОСНОВНЫЕ ЗАДАЧИ ПРИ ПОСТРОЕНИИ ГРАДУИРОВОЧНЫХ ХАРАКТЕРИСТИК 6.2.1 Основные математические задачи Сформулируем более конкретно основные математические задачи, которые возникают при построении ГХ, и наметим пути их решения. Для построения ГХ исследуемого средства измерений (измерительного прибора или преобразователя) при нескольких значениях входной величины X 1 ,…, X m (которые измеряют или устанавливают на входе) выполняют измерения соответствующих выходных величин Y1 ,…. Ym , где Yi f и , ( X j ). При этом получают набор результатов измерений ( xi , yi ), i= 1...m, которые представимы в виде : xi X i xi , yi Yi yi , где xi yi - погрешности и измерений входных и выходных величин. По этим экспериментальным данным строят ГХ, которую затем используют для нахождения значения входной величины и по результату измерения выходной величины y. В качестве оценки входной величины принимают x f 1 ( y) , где f 1 - функция, обратная к f . В связи с таким значением ГХ, вместо обычной «прямой» ГХ определяем так называемую «обратную» ГХ: X g (Y ) , которую можно было бы прямо использовать для нахождения значения входной величины x g ( y) . В итоге можно сделать заключение, что в большинстве случаев всетаки целесообразно строить обычную ГХ вида. Выбор вида ГХ должен быть основан на соотношении между погрешностями измерений_входной величины и выходной 1) ной Если погрешности форме) выходных измерений пренебрежимо величин xi yi , малы то величины. входных по величин сравнению целесообразно с (в относитель погрешностями строить обычную ГХ. Методы разработаны; ного построения они анализа основаны или ГХ на современных в этом классических робастных случае наиболее методах методах. регрессион- Для нахожде- значений х по у используют обратную функцию. 2) С другой стороны, если пренебрежимо малы погрешности измерений выходных величин yi << xi , то целесообразно строить обратную ГХ. Для этого применимы те же методы, которые разработаны для первого случая. Полученную ГХ можно непосредственно применять для оценивания значений х по у. Таким образом, если одна из величин (входная или выходная), измеряется точно, то именно ее и следует принимать в качестве аргумента при построении ГХ. 3) Нередко относительные погрешности измерений входных и выходных величин, xi и yi , бывают одного порядка. В этом слу- чае методы построения ГХ должны быть основаны на математических методах конфлюентного анализа. Выбор прямой или обратной ГХ обусловлен тем, для какой переменной (X или Y) выполнены дополнительные условия, необходимые для применения одного из методов конфлюентного анализа. Чаще эти условия выполняются для входной величины, и поэтому бывает целесообразно строить обычную ГХ. Экспериментально определенная ГХ Y f ( X ) отличается от истинной функции преобразования Y f и (X ) ; ГХ f (x) в точке X диапазона изменения входной величины определяется как ее отклонение от f и ( X ) : [Y ( X )] f и ( X ). Эта погрешность обусловлена, прежде всего, погрешностями измерений, выполняемых при определении ГХ (т.е. погрешностями результатов xi , yi ). Если ГХ представлена формулой, то, кроме того, имеется погрешность, обусловленная аппроксимацией истинной зависимости f и с помощью функций того класса, в котором мы ищем ГХ (например, погрешность из-за нелинейности f и при построении линейной ГХ). Таким образом, погрешность построенной ГХ можно представить в виде: [Y ( X )] а ( X ) и ( X ) где а (X ) = f а ( X ) - f и ( X ) -погрешность из-за аппроксимации истинной зависимости образом f и ( X ) с помощью функции f а ( X ) выбранного вида, наилучшим приближающей fи ( X ) ; и ( X ) f ( X ) f а ( X ) - погрешность, обусловленная погрешностями измерений при построении ГХ. Рисунок характеристики. 6.2.1 – Погрешности линейной градуировочной 6.2.2 Общий порядок построения ГХ Этого порядка целесообразно придерживаться независимо от вида ГХ и метода ее построения: 1. Определение функционального вида ГХ. При этом возможны следующие основные случаи: 1) вид ГХ известен из физических соображений, например, из физических закономерностей, описывающих свойства СИ, следует, что ГХ линейна. Однако определить вид ГХ из физических свойств СИ не всегда возможно, или такая зависимость может оказаться слишком сложной, неудобной для применения. 2) форма ГХ задана заранее; например требуется построить линейную ГХ. В этом случае необходимо оценить степень нелинейности истинной зависимости. 3) вид ГХ приближенно определяется на опыта и предварительного анализа основании предыдущего экспериментальных данных. Здесь необходимо далее проверить, что вид ГХ выбран правильно. 2. Выбор метода оценивания ГХ по экспериментальным данным. При этом учитывают: 1) принятый функциональный вид ГХ 2) априорные сведения о погрешностях измерений (соотношения между погрешностями измерений входных и выходных величин, между случайными и систематическими составляющими, характер изменения погрешностей по диапазону). 3. Построение ГХ выбранного вида. По результатам измерений ( xi , yi ), i-1…m, находят параметры ГХ и составляют уравнение (или строят ее график). Заметим, что параметры являются оценками параметров истинной зависимости. 4. Оцениваение погрешностей построенной ГХ. Для оценивания используют имеющиеся сведения о случайных и систематических погрешностях измерений и о характере их изменения по диапазону. Оценивают дисперсии и границы погрешностей для параметров ГХ, а также для расчетных значений ГХ (причем либо границы в отдельных точках, либо границы для всего диапазона). 5. Проверка правильности выбора вида зависимости (либо оценка степени отклонения истинной зависимости от выбранного вида). Используя графические или статистические методы, проверяют согласие экспериментальных данных с построенной ГХ. Если согласие оказывается неудовлетворительным, то уточняют (усложняют) функциональный вид ГХ. 6. Проверка согласия построенной ГХ с имеющейся ранее I л или номинальной ГХ. При поверке СИ после определения новой ГХ и оценивания ее погрешностей сравнивают новую ГХ с ранее принятой. Если изменение ГХ за межповерочный период не превосходит установленных пределов, то далее принимают и используют новую ГХ. Если же изменение ГХ оказалось недопустимо велико, то данное СИ бракуется при проверке. Его необходимо более тщательно исследовать и, возможно, отправить в ремонт или на регулировку. Иногда для СИ известна желательная (номинальная) ГХ; тогда построенную ГХ необходимо сравнивать с ней. Если отклонения построенной ГХ от номинальной данное СИ считают годным. не превышают допустимые, то