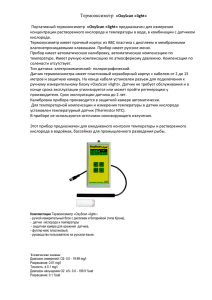
2023 Измерительные системы и датчики СХЕМОТЕХНИКА СЕРГЕЙ А. ЛИТВИНЕНКО Оглавление ЗАРЯДОВЫЙ ДАТЧИК, ГРАДИЕНТОМЕТР. .......................................................................................................... 3 ФЕРРОЗОНДОВЫЙ ДАТЧИК. ............................................................................................................................... 8 ГЕНЕРАТОРЫ ЭЛЕКТРИЧЕСКИХ КОЛЕБАНИЙ ...................................................................................................12 ЕМКОСТНЫЙ ГЕНЕРАТОРНЫЙ ДАТЧИК ...........................................................................................................16 АВТОГЕНЕРАТОРНЫЙ ИНДУКТИВНЫЙ ДАТЧИК С ИСПОЛЬЗОВАНИЕМ МАГНИТНОЙ КОМПОНЕНТЫ .......19 АВТОДИННЫЙ СВЧ ДАТЧИК..............................................................................................................................21 ЗАРЯДОВЫЙ ДАТЧИК, ГРАДИЕНТОМЕТР. Электрический заряд – это физическая величина, характеризующая способность частиц или тел вступать в электромагнитные взаимодействия. Электрический заряд обычно обозначается буквами q или Q. В системе СИ электрический заряд измеряется в Кулонах (Кл). Свободный заряд в 1 Кл – это гигантская величина заряда, практически не встречающаяся в природе. Как правило, имеют дело с микрокулонами (1 мкКл = 10–6 Кл), нанокулонами (1 нКл = 10–9 Кл) и пикокулонами (1 пКл = 10–12 Кл). Электрический заряд обладает следующими свойствами: 1. Электрический заряд является видом материи. 2. Электрический заряд не зависит от движения частицы и от ее скорости. 3. Заряды могут передаваться (например, при непосредственном контакте) от одного тела к другому. В отличие от массы тела электрический заряд не является неотъемлемой характеристикой данного тела. Одно и то же тело в разных условиях может иметь разный заряд. 4. Существует два рода электрических зарядов, условно названных положительными и отрицательными. 5. Все заряды взаимодействуют друг с другом. При этом одноименные заряды отталкиваются, разноименные – притягиваются. Силы взаимодействия зарядов являются центральными, то есть лежат на прямой, соединяющей центры зарядов. 6. Существует минимально возможный (по модулю) электрический заряд, называемый элементарным зарядом. Его значение: e = 1,602177·10–19 Кл ≈ 1,6·10–19 Кл. Электрический заряд любого тела всегда кратен элементарному заряду: q = N·e где: N – целое число. Обратите внимание, невозможно существование заряда, равного 0,5е; 1,7е; 22,7е и так далее. Физические величины, которые могут принимать только дискретный (не непрерывный) ряд значений, называются квантованными. Элементарный заряд e является квантом (наименьшей порцией) электрического заряда. 7. Закон сохранения электрического заряда. В изолированной системе алгебраическая сумма зарядов всех тел остается постоянной: q1+q2+q3+...+qn=const. Закон сохранения электрического заряда утверждает, что в замкнутой системе тел не могут наблюдаться процессы рождения или исчезновения зарядов только одного знака. Из закона сохранения заряда так же следует, если два тела одного размера и формы, обладающие зарядами q1 и q2 (совершенно не важно какого знака заряды), привести в соприкосновение, а затем обратно развести, то заряд каждого из тел станет равным: 𝑞1 + 𝑞2 𝑞′ = 2 По современным представлениям, электрические заряды не действуют друг на друга непосредственно. Каждое заряженное тело создает в окружающем пространстве Схемотехника. 4 электрическое поле. Это поле оказывает силовое действие на другие заряженные тела. Главное свойство электрического поля – действие на электрические заряды с некоторой силой. Таким образом, взаимодействие заряженных тел осуществляется не непосредственным их воздействием друг на друга, а через электрические поля, окружающие заряженные тела. Электрическое поле, окружающее заряженное тело, можно исследовать с помощью так называемого пробного заряда – небольшого по величине точечного заряда, который не вносит заметного перераспределения исследуемых зарядов. Для количественного определения электрического поля вводится силовая характеристика - напряженность электрического поля E. Напряженностью электрического поля называют физическую величину, равную отношению силы, с которой поле действует на пробный заряд, помещенный в данную точку поля, к величине этого заряда: 𝐹 𝐸= 𝑞 Напряженность электрического поля – векторная физическая величина. Направление вектора напряженности совпадает в каждой точке пространства с направлением силы, действующей на положительный пробный заряд. Электрическое поле неподвижных и не меняющихся со временем зарядов называется электростатическим. Для наглядного представления электрического поля используют силовые линии. Эти линии проводятся так, чтобы направление вектора напряженности в каждой точке совпадало с направлением касательной к силовой линии. Силовые линии обладают следующими свойствами. • Силовые линии электростатического поля никогда не пересекаются. • Силовые линии электростатического поля всегда направлены от положительных зарядов к отрицательным. • При изображении электрического поля с помощью силовых линий их густота должна быть пропорциональна модулю вектора напряженности поля. • Силовые линии начинаются на положительном заряде или бесконечности, а заканчиваются на отрицательном или бесконечности. Густота линий тем больше, чем больше напряжённость. • В данной точке пространства может проходить только одна силовая линия, т.к. напряжённость электрического поля в данной точке пространства задаётся однозначно. Электрическое поле называют однородным, если вектор напряжённости одинаков во всех точках поля. Например, однородное поле создаёт плоский конденсатор – две пластины, заряженные равным по величине и противоположным по знаку зарядом, разделённые слоем диэлектрика, причём расстояние между пластинами много меньше размеров пластин. Во всех точках однородного поля на заряд q, внесённый в однородное поле с напряжённостью E, действует одинаковая по величине и направлению сила, равная F = Eq. Причём, если заряд q положительный, то направление силы совпадает с направлением вектора напряжённости, а если заряд отрицательный, то вектора силы и напряжённости противоположно направлены. Зарядовый датчик, градиентометр. 5 Любое электрическое поле характеризуется напряженностью Е, которая является векторной величиной. В простейшем случае, если поле создано точечным зарядом q, то напряженность поля в какой-либо точке, находящейся на расстоянии r от заряда в соответствии с законом Кулона, будет 𝑘∙𝑞 1 𝐸 = 𝜀∙𝑟 2 , где 𝑘 = 4∙𝜋∙𝜀 . 0 она будет направлена вдоль прямой, соединяющей заряд с рассматриваемой точкой, и называется силовой линией. Кроме силовых линий, электрическое поле зарядов удобно характеризовать эквипотенциальными линиями, которые соединяют на силовых линиях точки, имеющие одинаковые потенциалы. Для одиночного точечного заряда эквипотенциальные линии представляют собой концентрические окружности. Для уединенного тела, несущего совокупность зарядов, конфигурация эквипотенциальных линий будет зависеть от геометрической формы тела и его физических характеристик. Как использовать электрическое поле для обнаружения посторонних объектов тел? Для простоты положим, что в окружающем пространстве действует равномерное электрическое поле. В этом случае силовые и эквипотенциальные линии образуют сетку взаимно перпендикулярных прямых. Если в это поле поместить постороннее тело, то происходит искажение линий поля. На рисунке 1. показано изменение электрического поля при введении проводящего и диэлектрического шара. Рис. 1. Электрическое поле с внесенным диэлектриком и проводником. Как видно из рисунков, наибольшее изменение напряженности имеет место в непосредственной близости от внесённых тел. Заряженное тело создаёт ещё большее изменение напряженности, таким образом, если иметь прибор, позволяющий измерять напряженность поля или фиксировать её изменение, то факт появления действия электрического поля постороннего объекта может быть обнаружен с помощью такого прибора. В качестве обнаружителя локальных неоднородностей наиболее приемлем градиентометр. Принцип его работы в первом приближении можно представить следующим образом. Пусть имеется точечный изолированный электрический заряд q, создающий электрическое поле. На одной силовой линии, созданной зарядом, выделим две точки А и Б на расстоянии rА и rБ соответственно. Диэлектрическую проницаемость среды (воздуха) примем равной 𝜀 = 1. Напряженность в точках А и Б соответственно будет: 𝑘∙𝑞 𝑘∙𝑞 𝐸А = 2 ; 𝐸Б = 2 , 𝑟А 𝑟Б а потенциалы точек: Схемотехника. 6 𝜑А = 𝑘∙𝑞 ; 𝑟А 𝜑Б = 𝑘∙𝑞 , 𝑟Б разность потенциалов: 1 1 |∆𝜑| = |𝜑А − 𝜑Б | = |𝑘 ∙ 𝑞 ( − )|. 𝑟А 𝑟Б Выразив расстояние между точками через ∆𝑟 ∆𝑟 = 𝑟А − 𝑟Б, получим ∆𝑟 |∆𝜑| = |𝑘 ∙ 𝑞 |. 𝑟А ∙ 𝑟Б Таким образом, если в точки А и Б ввести измерительные зонды, не изменяющие характеристик электрического поля, к ним подключить вольтметр с бесконечно большим входным сопротивлением, то прибор будет показывать разность потенциалов ∆𝜑, т.е. измерять разность потенциалов электрического поля между точками А и Б. В градиентометре расстояние ∆𝑟 выбрано постоянным, исходя из требований к конкретному прибору. В реальных конструкциях измерительные зонды имеют конечные размеры, что будет приводить к искажению поля. Во входной цепи вольтметра протекает ток, поскольку её сопротивление конечно, что также приводит к увеличению погрешности измерений напряженности поля. В то же время градиентометр более помехоустойчив по сравнению с другими приборами, предназначенными для измерения напряженности электрического поля. Конструктивно макет градиентометра выполнен на плате из диэлектрика, на которой расположены два зонда в виде прямоугольных металлических пластин, находящихся на расстоянии, равном 100 мм. К зондам подключен симметричный вход индикатора напряженности. Симметричный вход позволяет уменьшить влияние заведенного заряда от переменных электрических полей. Электрическая схема градиентометра приведена на рис. 2. Рис. 2. Схема электрическая принципиальная градиенометра. Как видно из рисунка, стрелочный прибор включен по балансной схеме, в которой активные элементы, полевые транзисторы VT1 и VT2 входят в состав транзисторной сборки. Это Зарядовый датчик, градиентометр. 7 позволяет считать их практически одинаковыми по электрическим параметрам; резисторы R1 и R2 одинаковы по величине сопротивления. Некоторый разбаланс, связанный с погрешностью изготовления пассивных и активных элементов, может быть устранен с помощью переменного резистора R3. Стабилитроны VD1 ... VD4 исключают возможность случайного пробоя транзисторов вследствие воздействия статического электричества. В активных элементах используется линейный участок характеристики. Диод VD5 включается при измерении электрической компоненты - электромагнитного поля, создаваемого цепями питания переменного тока и другими внешними источниками. Градиентометр позволяет демонстрировать на практике реакцию прибора на заряженное тело. Поскольку все тела в той или иной степени способны нести на себе заряд, в качестве примера заряженного тела выбрана металлическая пластина. При внесении заряженного тела в область действия градиентометра со стороны зонда А происходит отклонение стрелки индикатора тем сильней чем больше заряд на пластине. При внесении заряженного тела со стороны зонда Б, отклонение стрелки индикатора происходит в противоположную сторону. Повышение напряжения питания позволяет поднять чувствительность датчика, т.е. заметить отклонение стрелки индикатора на большем расстоянии заряженного тела от датчика. В ходе эксперимента помехой являются электрические поля, образованные протеканием переменного электрического тока в проводниках электросети. В силу того, что градиентометр выполнен по симметричной схеме и присутствует фильтр низких частот (элементы R, C) влияние помехи на работу прибора не оказывается. Однако если замкнуть ключ и тем самым параллельно индикатору подключить выпрямительный диод датчик будет способен реагировать на наличие переменных электрических полей. ФЕРРОЗОНДОВЫЙ ДАТЧИК. Общие сведения: феррозонд, реагирующий только на ферромагнитные материалы, применительно к метаталлодетектору не может являться самостоятельным устройством. В металлодетекторе он может использоваться как дополнительный канал, позволяющий распознать ферромагнитные объекты. Требования к феррозонду: чувствительность на холостом ходу 10-20 мкв/, размер не более 40-50мм (удобство размещения в металлодетекторе). Существует несколько физических принципов и основанных на них типов магнитометрических приборов, позволяющих фиксировать минимальные изменения магнитного поля Земли или искажения, вносимые ферромагнитными предметами. Рассмотрим основанный на нелинейных свойствах ферромагнитных материалов. Чувствительные элементы, реализующие этот принцип, получили название феррозонды. Феррозондом называется устройство, чувствительное к внешним магнитным полям, содержащее ферромагнитные сердечники и обмотки проводника, распределенные по их длине. Протекающие в них процессы всегда связаны с существованием двух полей внешнего измеряемого поля и некоторого вспомогательного поля, образуемого за счет тока, протекающего в одной из обмоток. Взаимодействие этих полей в объеме сердечников, изготавливаемых из легко насыщающихся магнитных материалов, например пермаллоя, приводит к появлению в другой обмотке электродвижущей силы, по величине которой судят о напряженности поля. По принципу действия феррозонды наиболее близки к магнитным усилителям. По существу, они и являются магнитными усилителями, у которых управляющая электрическая цепь заманена разомкнутой магнитной цепью. Существует довольно много типов и модификаций феррозондов. Феррозонды отличаются друг от друга по режиму работы, способу наложения вспомогательного поля, выбранной схеме и конструктивному исполнению. Эти отличия более или менее существенны в зависимости от диапазона и частотного спектра измеряемых полей, условий, в которых проводятся измерения, особенностей преобразования полезного сигнала в измерительной схеме. Наиболее распространен дифференциальный феррозонд рис.3, он содержит два одинаковых пермаллоевых сердечника, выполненных в виде тонких стержней прямоугольного сечения, уложенных в специальные каркасы параллельно друг другу. Поверх каркасов нанесены первичные обмотки, включенные последовательно и образующие цепь возбуждения феррозонда. Эту цепь питают переменным током звуковой или ультразвуковой частоты. Кроме первичных обмоток имеется также общая вторичная обмотка. Вторичная обмотка вместе с подключаемым к ней индикаторным прибором образует измерительную цепь. Феррозондовый датчик. 9 Рис. 3. Принципиальная схема дифференциального феррозонда. 1-пермаллоевые сердечники; 2-первичные обмотки; 3-вторичная обмотка. Сердечники феррозондов изготавливаются, как правило, из железоникелевых сплавов, характеризующиеся наибольшими значениями магнитной проницаемости и малым значением коэрцитивной силы Нс. Наиболее приемлемые сплавы: 80НХС, 79НМ и 79НМ-У. Эти сплавы обладают низким уровнем магнитных шумов и имеют малые константы анизотропии, что позволяет изготавливать из них сердечники различной формы. Кроме того, эти сплавы обладают хорошей температурной стабильностью и достаточно высоким удельным электрическим сопротивлением, что делает их пригодными не только для работы на звуковых, но и на более высоких частотах. Магнитные свойства указанных сплавов приведены в таблице 1. Таблица 1. Марка Толщина, Нс, а/м Относительная Вs, тл Точка сплава мм проницаемость материала Кюри, С нач макс д макс 80НХС 79НМ 79НМ-У 0,1 0,05 0,01 0,1 0,05 0,01 0,1 0,05 0,01 2-3 3-3,5 3,5-4 1-2 2-3 2-3 0,5-1 1-2 2-3 22 000 20 000 -------20 000 16 000 -------22 000 20 000 -------- 120000 80 000 -------120000 90 000 -------150000 120000 --------- 240000 --------110000 450000 --------190000 525000 -------310000 0,7 330 0,85 450 0,75 400 В таблице 1. даны минимальные значения нормальной начальной и максимальной проницаемости. Из таблицы следует, что магнитные свойства материалов зависят от их толщины. С уменьшением толщины эти свойства ухудшаются. Однако, если учесть, что на Схемотехника. 10 магнитные свойства сердечников феррозонда, как правило сильно влияет их форма, то указанное ухудшение свойств с уменьшением толщины сердечников, равно как и производственный разброс параметров материала, не оказывает существенного влияния на величины макс и д макс. При выборе толщины материала для сердечников феррозонда обычно исходят не из стремления использовать наибольшие значения проницаемости вещества, а из других соображений. К ним относятся: 1) обеспечение конструктивной жесткости сердечников; 2) обеспечение наиболее простой технологии их изготовления; 3) исключение поверхностного эффекта (скин-эффекта) для выбранной частоты поля возбуждения. Обеспечение жесткости сердечников и наиболее простой технологии их изготовления за счет использования материалов толщиной не менее 0,1 мм находится, однако, в известном противоречии с исключением эффекта поверхностного экранирования, если частота поля возбуждения выбирается достаточно высокой: 1 h (2...4) f где h - толщина сердечника в мм, f - частота поля намагничивания (возбуждения) в Гц. Отсюда предельные значения частот для соответствующих толщин сердечников будут (см. Таблицу 2.): Таблица 2. h, мм f, гц 1,0 16 0,1 1600 0,01 160000 0,001 16000000 Стремление повысить частоту возбуждения феррозонда базируется, с одной стороны, на расширении информационных возможностей феррозондовых устройств, с другой - на миниатюризации и повышении надежности этих устройств. Расширение информационных возможностей состоит в том, что при повышении частоты поля возбуждения, повышается и верхняя граничная частота спектра измеряемого поля. Миниатюризация феррозондовых устройств основывается на том, что с повышением рабочей частоты резко уменьшаются габариты и вес таких радиотехнических элементов, входящих в схему различных измерительных устройств. Феррозондовый преобразователь является векторным прибором, т.е. выходной сигнал преобразователя зависит от величины и направления приложенного поля. Это позволяет получать дополнительную информацию об ориентации и размерах скрытого ферромагнитного предмета. С помощью феррозондового градиентометра возможно оценивать глубину залегания предметов, для чего необходимо прорисовать огибающую сигнала от предмета в координатах: U - уровень сигнала, L - расстояние. Ширина этой огибающей на уровне 0,5 от максимума приблизительно равна глубине залегания предмета. Феррозондовый датчик. 11 Подводя итог, перечислим основные свойства феррозонда: 1. Феррозонд является датчиком активного типа, преобразующим действующую на него напряженность внешнего постоянного поля в э. д. с., кратную по частоте питающему его переменному току. Преобразование оказывается возможным благодаря нелинейности магнитных характеристик его сердечников. 2. В зависимости от выбранного режима работы феррозонда информацию о внешнем поле могут нести первая или вторая гармоники его выходной э.д.с. Использование второй гармоники выходной э. д. с. предпочтительнее, поскольку позволяет улучшить соотношение сигнал/помеха и создать высокочувствительные измерительные устройства. 3. Феррозонд является относительным индикатором поля. Измеренные с его помощью значения представляют собой результат сравнения напряженностей внешнего поля с величинами того же наименования. 4. Феррозонд имеет диаграмму направленности, максимум которой совпадает с направлением его продольной оси. Наличие диаграммы направленности позволяет использовать феррозонд не только для измерения напряженности поля, но и для измерения углов. 5. Феррозондовые приборы наиболее широко применяются в полевых условиях, характеризующиеся не только высокой чувствительностью и точностью, но и возможностью непосредственного измерения составляющих вектора магнитного поля (обеспечивая тем самым получение полной информации о структуре поля и его источниках), пригодностью для работы в очень слабых магнитных полях, в широком температурном диапазоне, высокой надежностью, долговечностью и низкой стоимостью. ГЕНЕРАТОРЫ ЭЛЕКТРИЧЕСКИХ КОЛЕБАНИЙ Генератором электрических колебаний - называется устройство, позволяющее преобразовать энергию постоянного тока в энергию электрических колебаний, возникающих в его схеме самопроизвольно, без периодического воздействия внешнего возбуждающего напряжения. Общие условия самовозбуждения Рассмотрим автогенератор как структуру, содержащую два основных звена: усилительное (К) и звено обратной связи с коэффициентом передачи Р (рис. 4). Рис. 4. Структурная схема автогенератора. Обозначим 𝐾 = 𝑈вых 𝑈вх = 𝑘𝑒 𝑖𝜑𝛽 (1) ( К - комплексный коэффициент усиления усилительного звена) и 𝑈 𝛽 = 𝑈1 = 𝛽𝑒 𝑖𝜑𝛽 (2) 2 ( 𝛽 - комплексный коэффициент передачи напряжения цепи обратной связи), где Uнапряжение на входе, a U- напряжение на выходе цепи обратной связи. Комплексная форма выражений вызвана необходимостью учета сдвигов фаз, создаваемых усилительным звеном и цепью обратной связи. При наличии в схеме автогенератора колебаний должно выполняться условие: 𝐾𝛽 = 𝐾𝛽𝑒 𝑖(𝜑𝑟 +𝜑𝛽) = 1(3) Из этого равенства вытекает: 1)𝐾𝛽 = 1 - условие баланса амплитуд (4) 2)𝜑𝑟 + 𝜑𝛽 = 2𝜋𝑛 - условие баланса фаз. (5) Здесь 𝑘 - модуль коэффициента усиления усилительного каскада, 𝛽 - модуль коэффициента передачи цепи обратной связи, 𝜑𝑟 - фазовый сдвиг, создаваемый усилительным каскадом, 𝜑𝛽 - фазовый сдвиг, создаваемый цепью обратной связи, n = 0,1,2,3,4, ... Эти условия являются очень важными в теории автогенераторов. Основной предпосылкой к самовозбуждению автогенератора и переходу его в режим установившихся колебаний является положительная обратная связь, характеризуемая совпадением фазы напряжения на выходе цепи обратной связи и входе усилителя. Под действием положительной обратной связи малые флуктуационные колебания, возникающие в схеме генератора после включения напряжения питания, усиливаются усилительным каскадом К и передаются цепью обратной связи, 𝛽 на выход усилителя. При Генераторы гармонических колебаний. 13 каждом обходе по замкнутому контуру, содержащему усилитель и цепь обратной связи, сигнал на входе и выходе усилительного звена прогрессивно возрастает. Такой рост продолжается до тех пор, пока процесс самовозбуждения не завершается установившимся режимом, для которого и выполняются условия баланса амплитуд (4). Для самовозбуждения автогенератора в начальный момент времени необходимо выполнение условия: 𝐾𝛽 > 1 (6) Если бы характеристика усилительного звена была линейной, это привело бы к бесконечному росту амплитуды автоколебаний. Поэтому усилительное звено должно обладать нелинейной характеристикой. Переход к установившемуся режиму обусловлен постепенным уменьшением коэффициента усиления усилительного звена в связи с уменьшением наклона усилительной характеристики при росте сигнала, что характерно для всех видов усилителей (рис. 5). Рис. 5. Характеристика усилителя. В принципе генератор с самовозбуждением мало отличается от усилительной ступени с цепью обратной связи. Одно из отличий заключается в том, что часто усилитель должен усиливать полосу частот и поэтому в качестве нагрузки используется апериодическая нагрузка (резистор, дроссель, трансформатор). Генератор генерирует чаще всего одну частоту, поэтому в качестве нагрузки используется параллельный колебательный контур, сопротивление которого на резонансной частоте максимально и имеет активный характер 𝐿 𝑅 = 𝜌𝑄, где 𝜌 = √ волновое сопротивление, Q - добротность. 𝐶 Примером генератора является транзисторный генератор с индуктивной связью (рис. 6). В этой схеме цепь обратной связи образована катушкой контура L и катушкой обратной связи в цепи базы LCB. Возникающее в контуре электрические колебания (в момент включения) наводят в катушке связи переменную ЭДС, которая создает переменное возбуждающее напряжение в цепи базы. Для этого вторичная обмотка цепи обратной связи должна быть так присоединена к выводам базы и коллектору транзистора, чтобы входное напряжение у нее имело фазу, сдвинутую на 180° по отношению к фазе выходного напряжения усилительного звена. Этим обеспечивается нулевой сдвиг (следовательно, положительная обратная связь) между входным и выходным напряжениями в петле обратной связи, так как усилительное звено также создает фазовый сдвиг, равный 180°. Схемотехника. 14 Рис. 6. Генератор на транзисторе. Колебательные режимы Процесс возникновения колебаний в автогенераторе зависит от условий, в которые поставлен усилительный элемент, то есть от выбранного рабочего режима, определяемого постоянными питающими напряжениями и величиной коэффициента обратной связи. Особую роль при выборе режима играет напряжение смещения Е, так как оно определяет положение рабочей точки на характеристике усилительного элемента. Если рабочая точка лежит в области большой крутизны, то самовозбуждение возникает легко, так как незначительные изменения напряжения во входной цепи вызывают значительные изменения выходного тока. Возможен также и другой случай, когда рабочая точка лежит в области минимальной крутизны, что приводит к затруднению самовозбуждения генератора. Следовательно, возможны два режима самовозбуждения: Мягкий режим самовозбуждения Мягкий режим (рис. 5) наблюдается при положении рабочей точки на прямолинейном участке характеристики усилительного элемента и характерен для схемы генератора на рис. 6. Появление сеточного тока препятствует повышению средней крутизны и ограничивает дальнейший рост импульсов анодного тока. Жесткий режим самовозбуждения. Для получения этого режима рабочая точка смещается влево, для чего на сетку подается отрицательное напряжение (рис. 6), более отрицательное, чем напряжение запирания (режим С с углом осечки 𝑞 < 90). При больших напряжениях смещения незначительные колебания, возникающие в контуре и передающиеся цепью обратной связи в сеточную цепь, не могут вызвать самовозбуждение генератора, так как лампа закрыта. Колебания могут возникнуть при очень большой начальной амплитуде, что иногда трудно обеспечить. Колебания возникают скачком и быстро нарастают до установившегося режима. С точки зрения эксплуатации удобен мягкий режим, так как колебания возбуждаются самопроизвольно и плавно (мягко). Однако наличие тока покоя (постоянной составляющей) приводит к низкому КПД и большим потерям, возникающим на электродах усилительного элемента. Поэтому в момент включения целесообразно иметь мягкий режим (напряжение смещения мало), а в установившемся режиме целесообразно перейти в жесткий режим (напряжение смещения большое). Эти противоречивые требования успешно удовлетворяются с помощью включения в сеточную цепь цепочки RC. По существу, в цепи сетки возникает выпрямительная схема, в которой роль диода выполняет промежуток катод - сетка, а нагрузочным сопротивлением этой схемы является R. В процессе самовозбуждения в цепи сетки на R возникает постоянное напряжение с отрицательной полярностью на сетке, которое является напряжением смещения. Конденсатор Генераторы гармонических колебаний. 15 С снижает пульсации и повышает постоянное напряжение на сетке. Для этого постоянная времени RC-цепи определяется соотношением 𝜏 = 𝑅𝐶 , где Т — период колебаний. Когда автоколебания в генераторе отсутствуют, нет и дополнительного отрицательного смещения. После возникновения колебаний появляются импульсы сеточного тока, которые создают отрицательное напряжение смещения, сдвигающее рабочую точку влево и переводящее схему из мягкого в жесткий режим. ЕМКОСТНЫЙ ГЕНЕРАТОРНЫЙ ДАТЧИК Понятие ёмкость. Ёмкостью “С” уединённого проводника (проводящего тела), т.е. проводника бесконечно удалённого от всех остальных проводников (проводящих тел) называется величина заряда q, необходимого для сообщения этому проводнику потенциала φ, равного единице. При этом предполагается, что постоянная в выражении потенциала выбрана так, что в бесконечности потенциал равен нулю. В абсолютной системе единиц ёмкость измеряется в единицах длины – «см». В практической системе единиц ёмкость выражается в фарадах. В практике используют более мелкие единицы мкФ, пФ. 1Ф=106мкФ = 1012 пФ = 91011 см. Если проводник (проводящее тело) не уединён, то потенциал, приобретаемый им при сообщении определённого заряда, существенно зависит от формы и расположения проводников (проводящих тел). Это обусловлено тем, что поле заряженного тела вызывает перераспределение зарядов на соседних с ним проводниках (телах), что сопровождается изменением ёмкости. Это свойство и послужило основой для использования емкостного датчика в качестве обнаружителя неоднородностей, объектов в окружающем пространстве. Конструктивно емкостной датчик представляет собой две изолированные друг от друга металлические пластины площадью S1 и S2 соответственно. Они расположены в одной плоскости и электрически подключены параллельно к колебательному контуру автогенератора, выполненного на биполярном транзисторе (рис. 7). Рис. 7. Схема электрическая принципиальная емкостного датчика. Принцип работы емкостного датчика Принцип работы заключается в том, что при появлении в электрическом поле создаваемом датчиком, постороннего тела, обладающего проводимостью, образуются электрические ёмкости, величина которых зависит от расстояния, положения, геометрических размеров тела и его расположения относительно датчика. Поскольку эти ёмкости оказываются подключёнными параллельно колебательному контуру, то происходит изменение его частоты. Таким образом, в этой системе датчик-объект информационным параметром является частота Емкостный генераторный датчик. 17 генерации, которая изменяется при воздействии объекта. Количественные характеристики для случая взаимодействия датчика с телом (объектом) с достаточной для практики точностью можно получить только для простейших случаев. Например, расположение датчика над металлической плоскостью, линейные размеры которой значительно превышают линейные размеры емкостного датчика. Предполагается, что пластины датчика параллельны плоскости. Схема взаимодействия изображена на рис. 8. Рис. 8. Схема взаимодействия емкостного датчика с протяженным объектом. Между пластиной датчика с площадью S1 и металлической плоскостью образуется ёмкость С1. С1 = 𝜀 ∙ 𝑆1 4∙𝜋∙𝑅 С2 = 𝜀 ∙ 𝑆2 4∙𝜋∙𝑅 и соответственно где 𝜀 =1,0006 - относительная диэлектрическая проницаемость среды. Между пластинами датчика (торцы пластин) также образуется ёмкость С3, которая оказывается параллельно включенной ёмкости катушки индуктивности и активного элемента и монтажа автогенератора. Обозначим их С4. В этом случае электрическая схема колебательного контура имеет вид как на рис. 9. Рис. 9. Принципиальная схема колебательного контура емкостного датчика. Эквивалентная ёмкость контура примет вид: С1 ∙ С2 Сэкв = + С3 + С4 С1 + С2 Частота генерации будет: 1 𝑓= 2 ∙ 𝜋√𝐿 ∙ 𝐶экв Индуктивность однослойной катушки без сердечника: Схемотехника. 18 0.394 ∙ 𝑟 2 ∙ 𝑁 2 9 ∙ 𝑟 + 10 ∙ 𝑙 где N - количество витков; r - радиус катушки; l - длина катушки. Поскольку С1 и С2 зависят от расстояния, то, очевидно, что частота генерации будет повышаться с приближением к объекту. Таким образом, появление любого проводящего объекта в зоне действия емкостного датчика будет сопровождаться изменением частоты автогенератора. Это изменение частоты может быть измерено различными способами. 𝐿= АВТОГЕНЕРАТОРНЫЙ ИНДУКТИВНЫЙ ДАТЧИК С ИСПОЛЬЗОВАНИЕМ МАГНИТНОЙ КОМПОНЕНТЫ Автогенераторный индуктивный датчик (рис. 10) представляет собой автогенератор с емкостной обратной связью, в котором в качестве индуктивности колебательного контура используется измерительный элемент, экранированная многовитковая рамочная антенна. Экранирование рамки практически полностью исключает влияние емкостных связей (электрического поля) датчика с исследуемым объектом, для этой же цели последовательно рамке с индуктивностью Lк включен конденсатор С1. Поскольку экран рамки выполнен из немагнитного материала, он практически не приводит к уменьшению чувствительности датчика. Рис. 10. Схема электрическая принципиальная индуктивного датчика Назначение других элементов датчика. С помощью резисторов R1, R2, R3 устанавливается режим работы автогенератора и обеспечивается температурная стабильность. Индуктивность рамки и собственная емкость катушки образуют колебательный контур, который создает собственное электромагнитное поле. Индуктивность L исключает шунтирование рамки цепью питания. Информативный сигнал может сниматься с цепи коллектора (нагрузки R3) по постоянному току и с цепи эмиттера по переменному току, сигнал генерируемой частоты. Для уменьшения влияния емкостей конструкции и схемы целесообразно параллельно индуктивности контура Lк включать конденсатор, возможно большей ёмкости. В данной конструкции функцию этого конденсатора выполняет экран рамки. Принцип работы индуктивного датчика. При включении питания автогенератор при отсутствии вблизи рамочной антенны ферромагнитных или проводящих электрический ток тел возбуждается и через небольшое время начинает работать в установившемся (стационарном) режиме. Частота генерируемых колебаний в этом случае определяется параметрами колебательного контура. 1 𝑓0 = 2 ∙ 𝜋√𝐿к ∙ 𝐶к Схемотехника. 20 Электромагнитная энергия, создаваемая автогенератором в колебательном контуре, частично излучается в окружающее пространство. Причем максимум магнитной компоненты поля будет направлен вдоль оси рамки, т. е. перпендикулярно её плоскости. Работу датчика целесообразно рассмотреть для двух частных случаев: 1) взаимодействие датчика с ферромагнитным телом с небольшой проводимостью; 2) взаимодействие датчика с проводящим телом, имеющим малое сопротивление. Взаимодействие с ферромагнитным телом. Появление вблизи рамки тела с магнитной проницаемостью приводит к концентрации магнитных силовых линий электромагнитного поля, увеличению потока сцепления , что сопровождается увеличением индуктивности 𝑑 𝐿= , 𝑑𝑖 где L - собственная индуктивность рамки; 𝑑 - приращение потокосцепления; di приращение тока в рамке. В общем случае на изменении индуктивности сказывается эффективная магнитная проницаемость, которая зависит от материала объекта, размеров воздействующего объекта, его положения и расстояния до рамочной антенны. При этом частота генерации 1 𝑓𝜇 = , 2 ∙ 𝜋√Ск (𝐿к + ∆𝐿к ) т.е. частота генерации понизится. Одновременно с этим изменится режим работы автогенератора, т.е. токи и напряжения, действующие в его цепях, вследствие изменения его нагрузки. Таким образом, в качестве информации о появлении ферромагнитного объекта в поле рамки можно использовать изменение частоты генерации или постоянного напряжения на сопротивлении R3. Взаимодействие с проводящим телом При появлении вблизи рамочной антенны проводящего тела электромагнитное поле вызывает появление в последнем вихревых токов, которые создают собственное поле, противодействующее основному. Это сопровождается уменьшением потокосцепления , созданного рамкой, то есть уменьшением её индуктивности. Одновременно в результате взаимодействия с объектом последним потребляется часть энергии излучения, т.е. можно считать, что в колебательный контур вносятся потери и соответственно изменяется нагрузка автогенератора и соответственно режим работы. Таким образом, в результате взаимодействия с токопроводящим объектом происходит повышение частоты генерации и изменение токов и напряжений в цепях автогенератора, в частности, изменение постоянного напряжения на R3. Так же, как и в предыдущем случае, эти изменения частоты или напряжения на R3 могут использоваться как информация об объекте. АВТОДИННЫЙ СВЧ ДАТЧИК. Теория систем ближней локации в СВЧ диапазоне достаточно сложна и для успешного усвоения требует знания ряда дисциплин, ограничимся упрощенной теорией и рабочими формулами. Рассмотрим автодинный датчик СВЧ диапазона, рабочая частота которого лежит в пределах 1…5 ГГц. При этом выходной информативный сигнал, реакция на объект либо препятствие, составляет десятки - сотни кГц и единицы милливольт по постоянному току. Для частотных измерений наглядно использовать анализатор спектра соответствующего диапазона. Автодинный датчик — это активная приемопередающая система, параметры которой изменяются под воздействием отраженного от объекта сигнала. Порядок работы автодинного датчика следующий: при включении источника питания в датчике спустя некоторое время возникают установившиеся колебания с частотой пропорциональной размеру полоска (конструктивная колебательная система). Колебательная система автодинного датчика является открытой, с низкой устойчивостью и способна изменять частоту колебаний при оказании влияния из вне, т.е. приближении – удалении объектов. В автодине полосок является одновременно и колебательной системой задающей частоту работы, приемной и передающей антенной. Во время работы автодинного датчика полосок излучает электромагнитную энергию в пространство (Рис.11) которая, распространяясь, ослабляется в пространстве в простейшем случае в L раз, где L - расстояние. Рис. 11 Схема работы автодинного датчика. Рабочая частота автодинного датчика рассчитывается исходя из размеров колебательной системы. Длинна полоска составляет четверть длинны волны (рис. 1). Длинна волны и частота связаны соотношением: 300000 f (кГц) = ( м) Поскольку в области действия автодинного датчика практически всегда присутствуют те или иные препятствия (земля, пол, стены, различные объекты), то электромагнитная волна частично отражается от них, частично поглощается объектом и некоторая доля электромагнитной волны способна проникнуть сквозь препятствие (рис. 12). Схемотехника. 22 Рис. 12 Схема работы автодинного датчика при наличии препятствия. В результате в ближней зоне между автодином и препятствием за счет сложения падающей и отраженной электромагнитной волны образуются стоячие волны. При этом модуль амплитуды стоячей волны зависит от координаты R по закону 2 2 U = U пад + U отр + 2U падU отр cos(2 0 R) U где - модуль амплитуды стоячей волны; U пад - амплитуда падающей волны; U отр - амплитуда отраженной волны; 0 - фазовая постоянная; R – расстояние до оъекта. На практике чаще информативным параметром является частота колебаний. Частота колебаний и длинна волны, жестко связаны соотношением: 30 = , f при этом -[см], f - [ГГц]. Конструктивно колебательная система автодинных датчиков строется по двум схемам: 1) с заземленной колебательной системой, т.е. окончание микрополосковой линии L= 2 , где L – длинна полоска в закорачивается конденсатором на общую шину. В этом случае см, а - длинна волны в см; 2) с изолированной колебательной системой, т.е. конец микрополосковой линии L= 4 , где L – длинна колебательной напрямую не связан с общей шиной схемы. В этом случае системы в см, а - длинна волны в см. На рис. 13 показана зависимость напряжения стоячей волны от расстояния R. Автодинный СВЧ датчик. 23 Рис. 13 Напряжение в ближней зоне при наличии затухания. Показанная зависимость напряжения стоячей воны в пространстве в физическом смысле характеризует распределение электромагнитной энергии в ближней зоне автодинного датчика, по сути, является характеристикой напряженности поля. Поскольку автодин является открытой системой, т.е. на работу электрической схемы оказывают влияние внешние факторы и препятствие или объект поиска. Это влияние приводит к тому, что режим работы автодина меняется по закону изменения электромагнитного поля в ближней зоне датчика. Если объект или препятствие изменяет свое положение (перемещается по оси R), то картина стоячих волн изменяется, что вызывает изменение токов, протекающих в схеме автодина и соответственно несущей частоты (здесь наглядным будет аналогия с расходящимися кругами на водной глади…). Этот факт позволяет производить измерения расстояний косвенным методом, т. е. зная закон изменения несущей частоты автодина либо уровень выходного напряжения можно поставить в соответствие измерение приращения расстояния. Автодинные датчики способны работать в двух типах систем: статической - объект либо препятствие, попадающее в область излученной электромагнитной волны, неподвижен или медленно меняет свое местоположение, в статической системе измеряется приращение расстояния до объекта; динамической - объект перемещается с некоторой скоростью относительно датчика, в некоторых случаях скорость объекта может превышает скорость звука, в динамической системе измеряется скорость движения объекта. В статической системе отражение электромагнитной волны от препятствия вызывает изменение фазы колебания на 180о. В этом случае отраженная волна действует в противофазе относительно излученной волны. Отраженная волна, распространяя в пространстве до антенны автодинного датчика с ослаблением. При попадании отраженной волны в антенну происходит изменение режима работы автодина, фаза колебаний изменяется, пропорционально фазе, при которой произошло отражение электромагнитной волны от препятствия (Рис. 11), это приводит к изменению частоты колебаний и режима роботы по постоянному току. Автодин работает в новом установившемся режиме, частота колебаний сохраняется до тех пор, пока препятствие повторно не изменит своего положения. При перемещении препятствия в точках максимума и минимума стоячей волны устанавливается минимум и максимум сигнала, соответственно, изменения частоты в этих точках уходят в крайние значения частоты и выходное напряжение по постоянному току достигает максимального и минимального значения (рис. 14). В таком случае получаем возможность измерения расстояния с высокой точностью по линейному закону в пределах. Схемотехника. 24 Рис. 14 Стоячие волны в ближней зоне. В динамической системе отражение электромагнитной волны от препятствия вызывает изменение фазы колебания на 180о, аналогично статическому режиму. Однако в отличие от статического режима изменения положения препятствия происходят гораздо чаще, это приводит к тому, что колебания несущей частоты автодинного датчика приобретают частотную модуляцию, а поскольку автодинный датчик одновременно является и детектором, то на выходе схемы получаем сравнительно низкочастотное колебание - пропорциональное скорости изменения фазы колебания. Проще говоря, на выходе автодинного датчика получим низкочастотное колебание пропорциональное скорости объекта, и чем выше скорость объекта, тем выше частота колебаний на выходе. Различные режимы передачи и соответствующая обработка автодинного сигнала позволяют в реальном времени получать информацию о размерах, объемных электрофизических свойствах исследуемых объектов, параметрах их движения (расстояние, скорость, ускорение, пройденный путь). Системы, построенные по автодинному принципу, имеют простейшую конструкцию приемо-передающего модуля, который содержит автогенератор на СВЧ транзисторе, обеспечивающий одновременное выполнение функции передатчика и преобразователя полезного сигнала, отраженного от объекта. Конструктивно автодинный датчик выполнен на одной печатной плате из фольгированного флана. Основную площадь занимает частотозадающий колебательный контур, конструктивно выполненный в виде площадки с размерами равными четверти длинны волны, и одновременно является передающей и приемной антенной. На рис. 15 показана электрическая схема автодинного датчика. Автодинный СВЧ датчик. 25 Рис. 15. Схема электрическая принципиальная автодинного датчика. Назначение элементов в схеме. Полосковая линия 4 является колебательным контуром, задающим частоту колебаний. Одновременно полосковая линия выполняет роль излучающей и приемной антенны. Резистивный делитель из двух сопротивлений R1 и R2 задают рабочую точку транзистора по постоянному току. R3 ограничивает сквозной протекающий ток и задает уровень излучаемой мощности электромагнитной волны. Цепочка из L1, R4 и C1 выполняет роль низкочастотного фильтра и нагрузки. Цепочка С2, С3 и L2 фильтр цепи питания. С2 и С3 сглаживают пульсации источника питания и являются малым сопротивлением для высокочастотного колебания автогенератора, а совместно с L2 сопротивление которого на высокой частоте значительное, препятствует прохождению высокочастотных колебаний в источник питания и не допускает попадания электромагнитных наводок из первичной сети переменного тока (~ 220В, 50 Гц). На выходе автодинного датчика, в точке 1 присутствует напряжение по постоянному току в единицы вольт, порядка 3 ... 4 В. При внесении проводящего объекта в область антенны происходит изменение режима работы автодина и изменяется частота высокочастотных колебаний, одновременно изменяется выходное напряжение, его изменения составляют единицы - десятки микроампер. Для того чтобы заметить и измерить эти изменения, в схему введен операционный усилитель U1, включенный по схеме масштабирующего усилителя. На входе операционного усилителя с помощью сопротивления R8 задается потенциал равный потенциалу в точке 1. Тем самым формируется виртуальный нулевой потенциал на входе операционного усилителя. Теперь при измерении режима генерации автодинного датчика на выходе усилителя получаем заметное изменение напряжения. Однако в точке 2 на выходе операционного усилителя будем так же иметь сравнительно высокий потенциал, который не дает возможность подключить измерительный прибор непосредственно к выходу усилителя. Стрелку прибора либо зашкалит, либо в случае грубого прибора изменения будут малозаметны. С помощью сопротивления R10 задается потенциал равный или близкий по значению потенциалу в точке 2. При такой схеме включения есть возможность использовать чувствительный измерительный прибор и его показания будут находиться в пределах рабочей шкалы.