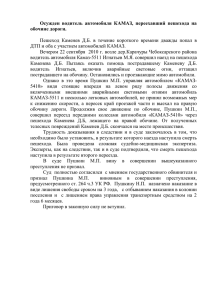
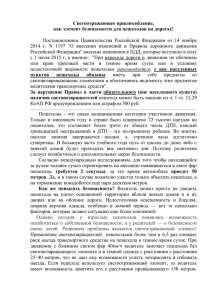
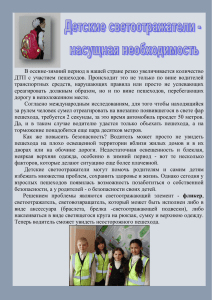
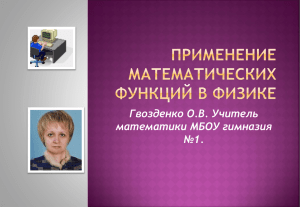
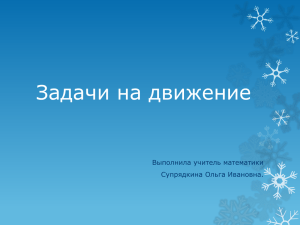
Министерство науки и высшего образования Российской Федерации Тольяттинский государственный университет Институт машиностроения В.М. Скутнев ОСНОВЫ АВТОТЕХНИЧЕСКОЙ ЭКСПЕР ТИЗЫ Электронное учебно-методическое пособие �� �� = �� �� , из которого при подстановке принятых на рисунке обозначений получаем уравнение вида �уд � �� � ∆� ∆� � . (4.61) Решая это соотношение �� � ∆относительно �П � ∆� Sуд и сравнивая его затем � возможности у водителя с SО, определяем наличие технической �П SПнаезда = (Sуд на + lпешехода. , (4.62) x) в данной ДТС �а S и сравнивая его затем с S , Решая этоизбежать соотношение относительно уд О Условие безопасного перехода пешеходом полосы движения ТС �уд � �� � ∆�возможности ∆� �а у водителя в данной ДТС определяем наличие технической = . (4.63) ∆� � ��частью ��удимеет � �� ��Пвид � ∆� �а для варианта наезда боковой избежать наезда на пешехода. �П (4.64) ≥ SП +пешеходом Ва + ∆Б. полосы движения ТС (4.64) Та.н перехода Условие безопасного для ��� варианта наезда боковой частью имеет вид ��� � Если из сравнения Sуд и∆S� �∆ последует вывод об отсутствии у во� SП = О �П + ∆ y + ly. (4.65) ��� �∆ �уд Та.н ≥ �SП + Ва + ∆Б. (4.64) дителя технической возможности ��� предотвратить наезд путем торможения, необходимоSудпровести последует вывод возможности об Sотсутствии убезопасводителя Sуд и SО исследование пн �� �� аxЕсли из сравнения =ного, перехода из которого при подстановке принятых на рисунке обозначений Sю пешеходом полосы движения с использованием �� �� технической возможности предотвратить наезд путемТС торможения, необходимо представленного выражением (4.64). получаемусловия, уравнение вида провести исследования возможности безопасного перехода пешеходом полосы �уд � �условия, •A � � ∆� движения ТС, с использованием представленного выражениемВ(4.64). × ∆� а Va � . 4.4.2. Исследование�наезда при� движении автомобиля (4.61) � � ∆� П � ∆� с торможением � ly 4.4.2. Исследование наезда при автомобиля с торможением (4.62) SП = вышедшего (S + lx) П, из-за уд движении Если наезд на пешехода, неподвижного препятS�Па Если наезд на пешехода, вышедшего из-за неподвижного препятствия, ствия, произошел в процессе торможения ТС, исследование можно �уд � �� � ∆V ∆� � �П а = . (4.63) произошелв последовательности, в процессе его ∆торможения, в провести выше. ��удисследование � �� ��П �рассмотренной ∆� �а можно провести � � �� аналогичной последовательности, аналогичной рассмотренной выше. Перемещение пешехода момента его обнаружения водителем до �от П Та.н ≥ SПП + Ва + ∆Б. (4.64) ���момента его от обнаружения водителем до наезда наездаПеремещение определим, пешехода воспользовавшись уравнением (4.55), из которого ∆x ∆� �∆� ��� �(4.55), из которого определим, воспользовавшись уравнением + ∆ y + ly. (4.65) SП = (4.65) �уд ��∆���∆ �∆����� � Рис. 4.8. Схема наезда на пешехода, вышедшего на часть справа в SП = + ∆проезжую (4.65) y + ly. �уд ��� �∆� аx Sуд Sпн поперечном направлении препятствия, передней частью ТС Sуд S Sпн аx из-за неподвижного ю Sю в процессе торможения (× – место наезда) ∆y ay Va •A Va ay ∆y ay ×× •A ∆y SУД = Ва �� �� �� � П �� а Н . ly ���а �П аl y S ��SП � �� �� SП = ��уд � Vа П НП � П. �а VП ���а ∆� �∆� ��� � + ∆y + ly =П��уд � ∆x П где VН – скорость наезда на пешехода, ∆xкм/ч. �уд ��� �∆� Ва (4.66) (4.67) ��а ��Н �� ���а � �П �а , (4.68) Рис. 10. Схема наезда на пешехода, вышедшего на проезжую часть справа в поперечном из-за неподвижного препятствия, передней Рис. 4.8. Схема наезданаправлении на пешехода, вышедшего на проезжую часть справа в 76 частью ТС в процессе торможения (× – место наезда) 56 поперечном направлении из-за неподвижного препятствия, передней частью ТС — 72 в процессе торможения (×— – место наезда) SУД = �П � �П а � SП = ��уд � ��а ��Н �� ���а ��а ��Н �� ���а . � (4.66) �П �а . (4.67) © ФГБОУ во «Тольяттинский государственный университет», 2020 ∆� �∆� ��� � �уд ��� �∆� + ∆y + ly = ��уд � где VН – скорость наезда на пешехода, км/ч. ��а ��Н �� ���а � �П �а , (4.68) 56 ISBN 978-5-8259-1483-1 УДК 656(076) ББК 033-082.03.73-5 Рецензенты: канд. техн. наук, доцент Московского политехнического университета А.Е. Емельянов; канд. техн. наук, доцент Тольяттинского государственного университета В.С. Малкин. Скутнев, В.М. Основы автотехнической экспертизы : электронное учебно-методическое пособие / В.М. Скутнев. – Тольятти : Изд-во ТГУ, 2020. – 1 оптический диск. – ISBN 978-5-8259-1483-1. В пособии рассмотрены нормативные документы и методики проведения экспертного исследования ДТП, которые могут быть использованы в курсовом проектировании. Приведены примеры выполненного исследования и заключения автотехнической экспертизы при ДТП. Изложены рекомендации по работе над курсовым проектом и требования к оформлению пояснительной записки и графической части курсового проекта по дисциплине «Основы автотехнической экспертизы». Предназначено для студентов направления подготовки 23.03.03 «Эксплуатация транспортно-технологических машин и комплексов» (профиль «Автомобили и автомобильное хозяйство»), также может быть использовано в подготовке студентов специальности 23.05.01 «Наземные транспортно-технологические комплексы» при изучении дисциплины «Основы автотехнической экспертизы». Текстовое электронное издание. Рекомендовано к изданию научно-методическим советом Тольяттинского государственного университета. Минимальные системные требования: IBM PC-совместимый компьютер: Windows XP/Vista/7/8; PIII 500 МГц или эквивалент; 128 Мб ОЗУ; SVGA; CD-ROM; Adobe Acrobat Reader. © ФГБОУ во «Тольяттинский государственный университет», 2020 произошелв последовательности, в процессе его ∆торможения, провести выше. в ��удисследование � �� ��П �рассмотренной ∆� �а можно провести � � �� аналогичной (3.23) последовательности, аналогичной рассмотренной выше. Перемещение пешехода момента его обнаружения водителем до �от П Т ≥ S + В + ∆ . (4.64) ПП уравнением а.н а Б ������� ���момента его от обнаружения водителем до наезда наездаПеремещение определим, пешехода воспользовавшись (4.55), из которого Vа = 1,8 ∙ Ja ∙ t3 + ������ ��� � �, (3.24) ∆x � ∆� �∆� ��� �(4.55), из которого определим, воспользовавшись уравнением + ∆ y + ly. (4.65) SП = (4.65) �уд ��∆���∆ �∆����� � Рис. 4.8. Схема наезда на пешехода, вышедшего на часть справа в + ∆проезжую (4.65) SП = y + ly. �уд ��� �∆� аx Sуд Sпн поперечном направлении препятствия, передней частью ТС Sуд S Sпн аx из-за неподвижного ю в процессе торможения (×Sю– место наезда) Va = 1,8 ∙ Jа ∙ t3 + ����а ��ю � �н� , Va •A Va ∆y ay ay ×× •A SУД = ∆y �П � �П аl � y ��а ��Н �� ly ���а Ва . SП SНП�� ��а �� SП = ��уд � VП � VП ���а ∆� �∆� ��� � + ∆y + ly =П��уд � ∆x П где VН – скорость наезда на пешехода, ∆xкм/ч. Ва (4.66) �П �а �уд ��� �∆� . ��а ��Н �� ���а (4.67) � �П �а , (4.68) Рис. 10. Схема наезда на пешехода, вышедшего на проезжую часть справа в поперечном из-за неподвижного препятствия, передней Рис. 4.8. Схема наезданаправлении на пешехода, вышедшего на проезжую часть справа в 76 частью ТС в процессе торможения (× – место наезда) 56 поперечном направлении из-за неподвижного препятствия, передней частью ТС — 72 в процессе торможения (×— – место наезда) Рис. 3.2. Схема перекрестного столкновения транспортных средств Рис. 3.2. Схема перекрестного столкновения транспортных средств Рис.3.2. 2. Схема Рис. Схемаперекрестного перекрестногостолкновения столкновениятранспортных транспортныхсредств средств �� �� �� � SУД = П �а � а Н . � �П ���а ��� cos γ� движения ; �вначале � �� � �определяются � �� cos γ� � �� По формуле (3.24) скорости ТС (3.25) (3.25) �� �� � �� ��� cos γ� � �� ��� cos γ� ; �� �� �� � � � cos γ , после столкновения:�� �� ����� (3.26) ����� ���� ����� cos cos γγ�� � γ� ; � (3.25) SП = ��уд � а Н � П. �� �� � ��cos ���а �а � �� �� cos �� ��� cos γ� , (3.26) �� �� первого • скорость движения ТС γ� � ��� cos γ�Елисеева � ��� γ , (3.26) �� �� � ��О.И. � ����cos ∆� �∆� ��� � �� �� �� � Редактор � �� � (3.27) ���� � ����� + ∆y + ly = ��уд � а Н � П, � ���н� ������� �� �; ���а �а �уд ��� �∆� (3.27)(3.27) �� � ����� �; � ������ ���н� � ��� � � �� � �; (3.27) � ����� � � �н� � Технический редактор Н.П.где Крюкова �� VН – скорость наезда на пешехода, км/ч. • скорость движения второго ТС ТС • скорость движения второго • скорость движения второго • скорость движения второгоТС ТС Компьютерная верстка: Л.В. Сызганцева �� � � (3.28) (3.28) ���� � ������ ���н� ��� �� ��� �� �;, � ����� �� � �; (3.28) � � �� � �; (3.28) � ����� � �н� � Художественное оформление, � �н� � �� где a и b , а и b – расстояния от осей переднего и заднего мостов где a1 и b1; а2 и b2 – расстояния от осей переднего и заднего мостов –расстояния расстояния от осей осей переднего мостов иa bи1; bа2; аи № bи21bкомпьютерное –и № от переднего мостов где где a1автомобилей проектирование: Г.В. Карасева 2 до их центров массы, м; L ииLизаднего –заднего колесная � � � 1 1 1 1 2 2 � �� �� �� �� 2 2 56 – колесная база автомобилей № 1 и1 и№№2 2додоих центров массы, м;L L1и иL L–2 колесная базабаза автомобилей центров массы, м; база автомобилей 1и№ м. автомобилей № № 1 и №№ 2 до ихих2, центров массы, м; L1 1 и 2L2 – колесная автомобилей № 1№ и1№ 2, 2,м.м. значений скоростей V’1 и V’2 в уравнения Затем подстановкой автомобилей и№ автомобилей № 1 и № 2, м. моментов количества движения (3.25) и (3.26) рассчитывают скорости движения ТС перед столкновением: 39 39 39 • скорость движения первого ТС 1 �� � �����φ� ��� cos γ� ��п�� � ��� �� �� �� � �����φ� ��� cos γ� ��п�� � ��� �� �� • скорость движения второго ТС �� 2 � �� cos γ� ��п�� � ��� �� �� ��; (3.29) (3.29) � �� cos γ� ��п�� � ��� �� �� ��. (3.30) �� — — 43 �� �� Va = 1,8 ∙ Jа ∙ t3 + ����а �ю� � �����а �ю� � ������� � �� ��а ��� � ������� , (3.31) Va = 1,8 ∙ Jср ∙ t3 + ������ю.л φлев � �ю.пр φпр �, (3.32) Va = 1,8 ∙ t'3 + ������ю� φ� � �ю� φ� � �ю� �� �, Dб = (t'1 + t2 + 0,5t3) �а ��� + �а� ��ап ��аз � ���ап �вз Dб = (t'1 + t2 + 0,5t3 − t2п − t3п) �а ��� , + �а� ��ап ���аз � ���ап �аз , (3.33) (3.34) (3.35) Дата подписания к использованию 17.02.2020. срабатывания тормозов переднего ТС, с; t – время нарастания замедления до Объем издания 5 Мб. установившегося значения переднего ТС, с. Комплектация издания: компакт-диск, первичная упаковка. Контрольные вопросы 1. Как определяется замедление при торможении? Заказ № 1-23-18. где t'1 – время реакции водителя для данного расчета, t'1 = 0,3 с; t2п – время 3п 2. Как определить скорость движения ТС по длине следа торможения? 3. Как определяется скорость движения ТС при торможении в разных Издательство Тольяттинского государственного университета 445020, г. Тольятти, ул. Белорусская, 14, скольжения и углу разворота ТС. 5. Определение тел. безопасной дистанции меду ТС. 8(8482) 53-91-47, www.tltsu.ru условиях сцепления и при прерывании торможения? 4. Определение скорости движения ТС по длине следа бокового 6. Определение скорости движения ТС, соответствующей видимости на дороге. 7. Как определяется скорость движения ТС перед столкновением с применением закона сохранения количества движения? (4.66) (4.67) (4.68) Cодержание УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ......................................................................6 ВВЕДЕНИЕ ....................................................................................................8 1. ЦЕЛЬ И ЗАДАЧИ КУРСОВОГО ПРОЕКТА .............................................9 2. ЭКСПЕРТИЗА ДОРОЖНО-ТРАНСПОРТНЫХ ПРОИСШЕСТВИЙ .....................................................................10 2.1. Причины возникновения и виды дорожно-транспортных происшествий .............................10 2.2. Производство экспертизы ..................................................13 3. РАСЧЕТ ПАРАМЕТРОВ ДВИЖЕНИЯ И ТОРМОЖЕНИЯ ................34 3.1. Процесс торможения автомобиля .......................................34 3.2. Расчет параметров движения автомобиля ..........................38 3.3. Расчет параметров торможения автомобиля при разных коэффициентах сцепления ..............................44 3.4. Расчет безопасной дистанции .............................................45 4. ИССЛЕДОВАНИЕ НАЕЗДА НА ПЕШЕХОДА ..................................46 4.1. Причины наезда автомобиля на пешехода и задачи экспертного исследования ...................................46 4.2. Исследование наезда на пешехода при неограниченной видимости и обзорности с места водителя .........................50 4.3. Исследование наезда на пешехода при попутном и встречном движении транспортного средства и пешехода ...........................................................................62 4.4. Исследование наезда на пешехода при ограниченной видимости и обзорности, ограниченной неподвижным препятствием ...............................................67 4.5. Наезд на пешехода при обзорности, ограниченной движущимся препятствием .................................................75 4.6. Исследование наезда на пешехода при ограниченной видимости или в темное время суток ..................................82 —4— 5. ПРИМЕРЫ ЭКСПЕРТНОГО ИССЛЕДОВАНИЯ ДТП .....................85 5.1. Исследование наезда транспортного средства на пешехода при неограниченной видимости и обзорности ........................................................................85 5.2. Исследование наезда транспортного средства на пешехода при обзорности, ограниченной неподвижным препятствием ...............................................97 5.3. Исследование наезда транспортного средства на пешехода при обзорности, ограниченной движущимся препятствием ...............................................109 5.4. Исследование наезда транспортного средства на пешехода при попутном и встречном движении ..........131 6. РЕКОМЕНДАЦИИ ПО ОФОРМЛЕНИЮ КУРСОВОГО ПРОЕКТА .............................................................154 6.1. Руководство курсовым проектированием .........................154 6.2. Оформление пояснительной записки ...............................155 ЗАКЛЮЧЕНИЕ .................................................................................158 Библиографический список ...........................................................160 Приложение А .................................................................................161 Приложение Б .................................................................................162 Приложение В .................................................................................168 Приложение Г .................................................................................171 Приложение Д .................................................................................173 Приложение E .................................................................................176 Приложение Ж ................................................................................180 Приложение И ................................................................................182 Приложение К ................................................................................184 Приложение Л .................................................................................186 —5— УСЛОВНЫЕ ОБОЗНАЧЕНИЯ a, b – расстояния от осей передних и задних колес до центра масс автомобиля соответственно, м; ax, ay – продольная и поперечная координаты положения места водителя в кабине, м; BA – ширина автомобиля, м; С – передний свес автомобиля, м; D – дистанция между автомобилями, м; Dб – безопасная дистанция между автомобилями, м; JА – установившееся замедление при торможении, м/с2; g – ускорение свободного падения, м/с2; ΔY – боковой интервал между автомобилями, м; ΔX – расстояние между передней частью транспортного средства (ТС) и пешеходом, м; ΔБ – безопасный боковой интервал, м; КЭ – коэффициент эффективности тормозов; L – колесная база автомобиля, м; Lа – длина автомобиля, м; lY – расстояние от точки удара пешехода передней частью автомобиля до боковой поверхности справа, м; lX – расстояние от точки удара пешехода о боковую поверхность до передней плоскости автомобиля, м; L1 – расстояние от оси задних колес до передней плоскости автомобиля, м; SА – путь, пройденный автомобилем, м; Sуд – удаление автомобиля до места наезда (столкновения) в момент возникновения опасности для движения, м; SЮ – длина следа продольного скольжения при торможении автомобиля, м; SО – остановочный путь, м; ST – тормозной путь, м; SДН – путь движения автомобиля до наезда на пешехода, м; SПН – путь движения автомобиля после наезда на пешехода, м; SП – расстояние, пройденное пешеходом от момента возникновения опасности для движения до наезда на него ТС, м; —6— SY – путь бокового скольжения автомобиля, м; SВ – расстояние, на котором обеспечена видимость дороги или препятствия, м; t1 – время реакции водителя, с; t′1 – время реакции водителя при определении безопасной скорости движения, соответствующей условиям конкретной видимости дороги, с; t2 – время срабатывания привода тормозов, с; t3 – время, за которое замедление при торможении нарастает до установившегося значения, с; t4 – время торможения с установившимся замедлением, с; T – время приведения в действие тормозной системы автомобиля, с; ТО – остановочное время, с; ТП – время движения пешехода от момента возникновения опасности для движения до наезда, с; Та – время передвижения автомобиля, с; Va – скорость передвижения автомобиля, м/с; VП – скорость передвижения пешехода, м/с; VН – скорость передвижения автомобиля в момент наезда на пешехода, м/с; φХ – коэффициент сцепления протектора шин с поверхностью дороги в продольном направлении; φY – коэффициент сцепления протектора шин с поверхностью дороги в поперечном направлении. —7— ВВЕДЕНИЕ Неуклонное увеличение количества автомобилей на магистралях страны сопровождается ростом числа дорожно-транспортных происшествий (ДТП). Несмотря на мероприятия, проводимые на государственном и региональном уровне, количество ДТП, в том числе со смертельными исходами, и количество погибших в них людей остается весьма значительным. В общей статистике аварийности на дорогах значительное место занимают столкновения транспортных средств (ТС) и наезды ТС на пешеходов. Эта закономерность подтверждается данными ГИБДД РФ за 2015 год, согласно которым из 184 тысяч ДТП с пострадавшими людьми имело место 75 266 столкновений (41 %) и 56 918 наездов на пешеходов (31 %). В системе мер, принимаемых в стране для снижения количества ДТП, важное место отводится мерам административного и уголовного воздействия. На всех стадиях рассмотрения материалов ДТП и определения состава преступления или нарушения административного законодательства значимое место отводится судебной автотехнической экспертизе (САТЭ). Анализ обстоятельств ДТП, исследование технического состояния ТС и трасологическая экспертиза следов на ТС и на месте ДТП выступают инструментами доказательств. На этом основании САТЭ остаётся одной из самых востребованных экспертиз, выполняемых в ходе рассмотрения административных или уголовных дел, связанных с участием транспортных средств в ДТП и их неисправностями. Данное учебно-методическое пособие дает общее представление о видах автотехнических экспертиз, методиках и порядке их проведения при ДТП, связанных с наездом на пешеходов и столкновением ТС, а также об их практической реализации в процессе изучения дисциплины «Основы автотехнической экспертизы», в том числе при выполнении курсового проекта. —8— 1. ЦЕЛЬ И ЗАДАЧИ КУРСОВОГО ПРОЕКТА Цель курсового проектирования – углубление знаний, умений и практических навыков, полученных студентами на лекциях и практических занятиях по дисциплине «Основы автотехнической экспертизы». В процессе курсового проектирования приобретается умение представить научно обоснованную характеристику ДТП на всех его стадиях, определить объективные причины возникновения ДТП, установить, имел ли место несчастный случай или ДТП возникло в результате неправомерных действий кого-либо из его участников, действия которых не соответствовали требованиям безопасности движения. Навыки, приобретенные студентами при выполнении курсового проекта, позволят выпускнику вуза самостоятельно осуществлять производство автотехнических экспертиз при расследовании ДТП в соответствии с принятыми методиками и законодательством Российской Федерации. Задачи курсового проектирования состоят в следующем: 1) сформировать у студентов знания о видах судебных экспертиз, производимых при выявлении обстоятельств и причин ДТП; 2) научить студентов методикам анализа факторов, относящихся к данному ДТП, способствующих его возникновению и развитию; 3) научить студентов методикам практических расчётов при ответах на типовые вопросы, решаемые при производстве САТЭ; 4) привить студентам навыки выполнения автотехнических исследований; 5) научить студентов составлять заключение САТЭ. Курсовой проект по дисциплине «Основы автотехнической экспертизы» выполняется в виде расчетно-пояснительной записки и листа со схемой ДТП. —9— 2. ЭКСПЕРТИЗА ДОРОЖНО-ТРАНСПОРТНЫХ ПРОИСШЕСТВИЙ 2.1. Причины возникновения и виды дорожно-транспортных происшествий Причины возникновения и последствия дорожно-транспортных происшествий в целом обусловлены несовершенством взаимодействия составляющих системы «водитель – автомобиль – дорога – окружающая среда», или сокращенно ВАДС. В соответствии с принятой терминологией дорожно-транспортное происшествие – это событие, возникшее в процессе движения по дорогам транспортного средства (ТС) и с его участием, при котором погибли или ранены люди, повреждены транспортные средства, груз, сооружения. На безопасность дорожного движения влияет стремительная автомобилизация страны, повлёкшая за собой резкое повышение интенсивности и плотности транспортного потока наблюдается неуклонный рост количества автомобилей на дорогах и появление за рулем большого числа молодых и неопытных водителей. В условиях интенсивного транспортного потока на безопасность движения влияют психофизиологические возможности человека как водителя, управляющего техническим средством, тогда как в этой части возможности человека ограничены. Высока доля находящихся в эксплуатации автомобилей устаревших конструкций, свойства которых значительно отличаются от свойств современных автомобилей. Это не обеспечивает им равные возможности постоянного контроля за движением ТС в соответствии с требованиями безопасности. Причины ДТП можно разделить на субъективные и объективные. К субъективным причинам относятся: • несоблюдение водителями, пассажирами и пешеходами, а также иными участниками дорожного движения Правил дорожного движения (ПДД); • несоблюдение водителями и лицами, ответственными за поддержание автомобилей и дорог в надлежащем техническом состоянии, правил безопасности движения и эксплуатации транспортных средств. — 10 — Объективными причинами считаются: • несоответствие планировки улиц и автомагистралей современному транспортному потоку и его напряженности; • слабая освещенность проезжей части в темное время суток; • низкое качество и плохое состояние дорожного покрытия; • недостаточное количество средств организации и регулирования дорожного движения, в том числе дорожных знаков, транспортных и пешеходных светофоров, дорожной разметки, экипажей ДПС; • низкий уровень эксплуатационных свойств автотранспортных средств (АТС), находящихся длительное время в эксплуатации. Из анализа статистики аварийности на дорогах России следует, что наиболее распространенными причинами ДТП, связанными с действиями водителя, являются: • превышение водителями установленной ограничениями ПДД скорости движения; несоответствие выбранной скорости движения дорожным и метеорологическим условиям; • несоблюдение правил обгона в зоне ограниченной видимости в направлении движения; • нарушение правил маневрирования, перестроения, разворотов, начала движения; • несоблюдение безопасной дистанции движения транспортных средств и необходимого бокового интервала, обеспечивающих безопасность движения; • управление автотранспортным средством в состоянии алкогольного или наркотического опьянения; • несоблюдение очередности проезда перекрестков; • несоблюдение правил проезда нерегулируемых пешеходных переходов; • игнорирование дорожных знаков, дорожной разметки; • невключение световых указателей поворота; • сон за рулем и др. Возросло количество ДТП в виде столкновений ТС, обусловленных резким торможением перед пешеходными переходами и светофорами в связи с ужесточением штрафных санкций. При расследовании обстоятельств происшествий и проведении САТЭ используют следующую классификацию ДТП: — 11 — • столкновение – это происшествие, при котором столкнулись между собой движущиеся АТС, движущее АТС с внезапно остановившимся ТС, с подвижным железнодорожным составом; • опрокидывание – это происшествие, при котором движущееся ТС опрокинулось на дорожном полотне или вне его, в том числе и в результате предшествующего происшествия; • наезд на стоящее транспортное средство – это происшествие, при котором движущееся ТС наехало на стоящее ТС, в том числе на прицеп или полуприцеп; • наезд на неподвижное препятствие – это происшествие, при котором ТС совершило наезд на неподвижный объект (ограждение, бордюр, световая опора и т. п.) или ударилось о него; • наезд на пешехода – это происшествие, при котором ТС наехало на человека или он сам натолкнулся на движущееся ТС; сюда же относятся происшествия, в которых пешеходы пострадали от перемещений перевозимого ТС груза или предмета; • наезд на велосипедиста – это происшествие, при котором ТС наехало на движущегося велосипедиста или он сам натолкнулся на движущееся ТС; • наезд на гужевой транспорт – это происшествие, при котором ТС наехало на упряжных животных, а также на повозки, транспортируемые этими животными, либо упряжные животные или повозки, транспортируемые этими животными, ударились о движущееся ТС; • наезд на животных – происшествие, при котором ТС наехало на диких или домашних животных, включая вьючных, верховых, скот и птицу, либо сами эти животные ударились о движущееся ТС, в результате чего пострадали люди или причинен материальный ущерб; • прочие происшествия – происшествия, не относящиеся к перечисленным выше видам: падение перевозимого груза или отброшенного колесом ТС предмета на человека, животное или на другое ТС; наезд на лиц, не являющихся участниками движения; наезд на внезапно появившееся препятствие (упавший груз, отделившееся колесо); падение пассажиров с движущегося ТС или в салоне движущегося ТС в результате резкого изменения скорости или траектории движения; сход с рельсов трамвая и др. — 12 — 2.2. Производство экспертизы 2.2.1. Цели и задачи автотехнической экспертизы Автотехническая экспертиза – это научно-техническое исследование обстоятельств ДТП, выполненное экспертом (экспертами), обладающим специальными познаниями в данной области науки и техники. Если экспертиза проводится по определению суда, то ее называют судебной автотехнической экспертизой, или сокращенно САТЭ. Предметом САТЭ являются фактические данные о техническом состоянии ТС и о его механических повреждениях, о дорожной обстановке и о средствах организации дорожного движения на месте происшествия, о действиях участников происшествия и их возможностях, механизме ДТП, а также об обстоятельствах, способствующих совершению преступления, которые устанавливает экспертавтотехник на основе своих специальных познаний и материалов уголовного или гражданского дела. Целью экспертизы является научно обоснованное восстановление обстоятельств и процесса происшествия и установление объективных причин возникновения ДТП. Фактические данные, установленные САТЭ, могут служить одним из доказательств для установления истинных причин совершения ДТП при рассмотрении материалов в гражданском или уголовном порядке. Выводы по САТЭ могут иметь определяющее значение для проверки, подтверждения или опровержения данных, полученных на основе других доказательств. Наиболее часто САТЭ проводят по делам об автотранспортных происшествиях (преступлениях) и о выпуске в эксплуатацию технически неисправных ТС. С помощью выводов экспертизы лица, расследующие данное происшествие и принимающие по нему решение, получают возможность установить, имел ли место в рассматриваемом событии несчастный случай или событие произошло в результате неправильных действий его участников, пренебрегших требованиями безопасности дорожного движения. Для достижения поставлен— 13 — ной при назначении автотехнической экспертизы цели в процессе экспертного исследования эксперту предстоит решить ряд частных задач, связанных определенной последовательностью. К таким задачам относят: • выяснение, систематизация и критический анализ факторов, сопутствующих ДТП: технического состояния ТС и дороги, организация дорожного движения на данном участке дороги, параметров движения ТС и пешеходов и др.; • отбор объективных факторов, способствующих возникновению и развитию ДТП, и проведение теоретического и экспериментального исследования; • установление технических причин, вызвавших совершение исследуемого ДТП, и определение наличия технических возможностей у его участников предотвратить происшествие; • определение действий каждого из участников рассматриваемого ДТП и соответствия этих действий требованиям ПДД и других нормативных актов. Эксперт в рамках своей компетенции решает специальные вопросы, возникающие в процессе следствия и при рассмотрении дела в суде, и оказывает содействие следователю или суду в установлении механизма ДТП и правильной юридической оценке действий каждого из участников происшествия. 2.2.2. Виды автотехнических экспертиз Рассматривая автотехническую экспертизу как род инженерно-транспортной экспертизы, в ней можно выделить отдельные виды и подвиды, различающиеся предметом, объектами и частными методиками исследования. Исходя из предмета доказывания и содержания применяемых при проведении исследований специальных познаний в САТЭ выделяют судебную экспертизу: –– обстоятельств ДТП; –– технического состояния ТС (исследование технического состояния транспортных средств, допущенных к эксплуатации); –– следов на ТС и месте ДТП (транспортно-трасологическая диагностика). — 14 — Наряду с указанными выше в экспертной практике известны еще два вида САТЭ: инженерно-психофизиологическая экспертиза участников ДТП и автодорожная экспертиза. В процессе производства экспертизы каждый из указанных видов САТЭ решает свой круг задач самостоятельно либо в комплексе с другими видами САТЭ, а также с экспертизами, не относящимися к автотранспортным: трасологической, судебно-медицинской, металловедческой и др. Судебная экспертиза обстоятельств ДТП направлена на экспертное исследование дорожно-транспортных ситуаций (ДТС), расчет технических параметров движения ТС и пешеходов в процессе ДТП и ему предшествующем, а также анализ действий и технических возможностей водителей. Предметом судебной экспертизы обстоятельств ДТП являются представленные фактические данные об обстоятельствах ДТП, техническом состоянии ТС и загруженности, скорости его движения, типе покрытия проезжей части и его состоянии, продольном и поперечном профилях проезжей части, режиме движения ТС и т. д. При проведении судебной экспертизы обстоятельств ДТП решаются следующие задачи: –– определение скорости движения ТС в процессе ДТП и на предшествующих стадиях; –– определение времени приведения в действие тормозной системы ТС, остановочного времени, тормозного и остановочного пути; –– определение удаления ТС, пешеходов и иных объектов от места ДТП в заданные следствием (судом) моменты; если момент возникновения опасности для движения не задан следствием (судом), он может быть определен экспертом в рамках его компетенции; –– установление момента возникновения опасности для движения, требующего принятия экстренных мер по предотвращению ДТП, если для этого требуются специальные познания; –– установление технической возможности предотвращения ДТП торможением или объездом в заданные следствием (судом) моменты; если момент возникновения опасности для движения не задан следствием (судом), он может быть определен экспертом в рамках его компетенции; — 15 — –– определение времени преодоления ТС конкретных участков пути, в том числе в заторможенном состоянии; –– определение взаимного расположения ТС на различных стадиях развития ДТП; –– определение взаимного положения ТС и препятствия в момент, когда водитель обладал технической возможностью предотвратить происшествие путем торможения или безопасного объезда препятствия; –– определение действий водителя в сложившейся ДТС для предотвращения ДТП с технической точки зрения по обеспечению безопасности движения; –– определение действий водителя, которыми он, начиная с момента возникновения опасности для движения, имел техническую возможность предотвратить ДТП, и требований Правил дорожного движения (ПДД), которыми эти действия предусмотрены; –– установление наличия технической возможности у водителя в момент, указанный органом, назначившим экспертизу, или установленный экспертным путем, совершить действия, предписанные ПДД, для предотвращения происшествия; –– определение наличия у водителя технической возможности предотвратить ДТП путем снижения скорости движения ТС или безопасным объездом препятствия в момент, определенный органом, назначившим экспертизу, или установленный экспертным путем, когда водитель обязан был и имел техническую возможность предвидеть возникновение препятствия либо опасности для движения; –– установление наличия у водителя технической возможности предотвращения ДТП как по исходным данным, указанным органом, назначившим экспертизу, так и по полученным экспертным путем вариантам развития обстановки происшествия, вытекающим из материалов дела; –– определение причин и условий, связанных с организацией дорожного движения на данном участке дороги, способствующих совершению ДТП. В процессе проведения САТЭ технического состояния ТС путем экспертного исследования состояния его систем, агрегатов, ме— 16 — ханизмов, узлов и деталей устанавливается их работоспособность, определяются причины и время возникновения неисправностей, а также технические возможности их своевременного обнаружения. Предметом САТЭ технического состояния ТС являются фактические данные о техническом состоянии ТС, участвовавших в ДТП. При производстве данного вида САТЭ решаются следующие задачи: –– установление технического состояния ТС, их отдельных узлов, механизмов, систем, деталей; –– определение причин и времени возникновения неисправностей, возможности своевременного их выявления лицами, ответственными за техническое состояние ТС, влияния этих неисправностей на возникновение и развитие ДТП; –– установление причинно-следственных связей между обнаруженными при осмотре ТС неисправностями и ДТП, а также обстоятельств появления этих неисправностей; –– установление наличия технической возможности предотвращения ДТП при определенном в процессе экспертного исследования техническом состоянии ТС, их отдельных узлов, механизмов, систем, деталей в момент ДТП; –– установление обстоятельств, связанных с техническим состоянием ТС, которые способствовали или могли способствовать возникновению ДТП. Приведенные задачи САТЭ технического состояния ТС часто решают только в комплексе с металловедческой экспертизой разрушенных деталей, а в отдельных случаях и с трасологической экспертизой. К ним, в частности, относится задача установления причины (способа) и времени поломки деталей ТС: до происшествия, в процессе ДТП или на последующих стадиях. САТЭ следов на ТС и месте ДТП (транспортно-трасологическая диагностика) включает комплексное трасолого-автотехническое исследование повреждений ТС, различных объектов, следов и обстановки на месте происшествия с определением траектории и характера движения относительно расположения ТС, пешеходов и других объектов до столкновения (наезда) и установления места столкновения (удара), наезда, опрокидывания. — 17 — Предметом САТЭ следов на ТС и на месте ДТП являются фактические данные, устанавливаемые экспертом на основе исследования следов, возникших на самом транспортном средстве и на месте ДТП в результате взаимодействия ТС и иных материальных объектов, людей, животных. При производстве САТЭ следов на ТС и месте ДТП решаются следующие задачи: –– определяется механизм ДТП; –– устанавливается механизм взаимодействия транспортных средств при столкновении или механизм наезда на пешеходов (животных) и неподвижные препятствия; –– определяется угол взаимного расположения ТС и направление удара в момент столкновения; –– устанавливается взаимное расположение ТС и расположение относительно границ и оси проезжей части; –– определяется место столкновения ТС или место наезда на пешехода; –– устанавливается факт движения или неподвижности ТС при столкновении; –– определяется часть ТС, которой нанесены повреждения потерпевшим; –– по характеру повреждений на ТС определяется место нахождения потерпевшего в салоне или кабине ТС в момент столкновения; –– устанавливаются части ТС, контактировавшие между собой в первичный момент столкновения; –– определяется наличие, время и причины образования повреждений шин ТС, гибких тормозных шлангов, резьбовых соединений и т. д.; –– устанавливается факт возникновения неисправности деталей ТС после ДТП. В процессе производства комплексной САТЭ и судебно-медицинской экспертизы (СМЭ) с привлечением результатов исследования следов на ТС и месте ДТП можно решить следующие задачи: –– установление взаимного расположения человека и частей ТС при наезде; –– оценка особенностей функционального состояния людей ко времени взаимодействия их с частями ТС; — 18 — –– определение позы и двигательных реакций пострадавших; –– выявление признаков, характеризующих действия водителя; –– получение объективной информации об условиях травмирования для сопоставления ее с показаниями свидетелей ДТП. Некоторые из этих задач, наряду с упомянутой СМЭ, можно решить только в комплексе с другими видами судебной экспертизы. Так, определение взаимного расположения ТС и пешехода в момент наезда осуществляется производством экспертиз: комплексной автотехнической, медицинской, трасологической (исследование одежды и обуви), а также криминалистической экспертизой материалов, веществ и изделий. По количеству, составу и специальностям участников различают единоличные, комиссионные и комплексные экспертизы. Единоличную экспертизу назначают в сравнительно простых случаях, когда характер ДТП на стадии предварительного рассмотрения не вызывает разногласий у участников процесса в толковании отдельных его обстоятельств. Комиссионная экспертиза может быть назначена при разборе сложных происшествий с большим числом пострадавших, участников ДТП и ТС, в случаях наличия обстоятельств, вызывающих сомнения или разногласия в их толковании. В состав комиссии входят несколько экспертов одной специальности, которые исследуют одни и те же объекты и отвечают на одни и те же вопросы. При этом комиссия экспертов представляет общее заключение, согласованное со всеми ее членами, подписанное всеми экспертами. В случае возникновения разногласий каждый из членов комиссии может представить свое письменное особое мнение с обоснованием своих возражений. Комплексную экспертизу назначают в случаях, когда необходимые для экспертного разрешения вопросы не могут быть решены специалистами одного профиля и требуются эксперты разных специальностей. Для проведения комплексной экспертизы в состав комиссии кроме эксперта-автотехника могут быть включены медики, криминалисты и т. д. При проведении экспертизы комиссия исследует одни и те же объекты, но решает пограничные вопросы, общие для специалистов различных отраслей знания. При — 19 — этом каждый член комиссии подписывает свой раздел экспертного исследования и выводы по нему. В ходе судебного разбирательства ДТП возникает необходимость в дополнении к уже имеющейся САТЭ или ее повторении. По очередности проведения САТЭ различают первичную, дополнительную и повторную экспертизы. При проведении первичной экспертизы эксперт-автотехник отвечает на содержащиеся в постановлении следователя или определении суда вопросы и делает по ним выводы. При недостаточной ясности или неполноте заключения эксперта может быть назначена дополнительная экспертиза. Дополнительная экспертиза может быть назначена тому же или другим экспертам. Дополнительное исследование разъясняет заключения, данные ранее, уточняет процесс исследования ДТП и смысл выводов. Дополнительно аргументируются выводы на поставленные ранее вопросы. При проведении дополнительной экспертизы эксперту может быть задан дополнительный вопрос в случае выявления в ходе судебного рассмотрения фактов, не влияющих на ранее использованные исходные данные. Повторная экспертиза может быть назначена, если имеется сомнение в квалификации эксперта, правильности проведенной экспертизы, объективности ее выводов или в достоверности исходных данных, положенных в основу заключения, а также при обнаружении нарушений требований УПК РФ. Необходимость в проведении повторной экспертизы возникает также при выявлении дополнительных материалов, неизвестных при первичной экспертизе и по-новому освещающих обстоятельства дела. Повторная экспертиза чаще всего бывает комиссионной и назначается только в новом составе. В состав комиссии не могут быть включены эксперты, участвовавшие в проведении первичной и дополнительной экспертиз. 2.2.3. Порядок назначения судебной экспертизы Проведение судебной экспертизы ДТП осуществляется по постановлению следователей и определению судов в предусмотренном законом порядке. В соответствии с ч. 2 ст. 195 УПК РФ производство судебной экспертизы может быть поручено государственным — 20 — и судебным экспертам из числа лиц, обладающих специальными знаниями в области назначаемой экспертизы. К государственным судебным экспертам относят аттестованных работников государственного судебно-экспертного учреждения, производящего экспертизы в порядке исполнения своих должностных обязанностей. Государственные судебно-экспертные учреждения – это специализированные учреждения федеральных органов исполнительной власти, а также субъектов Российской Федерации, созданные для обеспечения исполнения полномочий судов, судей, органов дознания, следователей и прокуроров посредством организации и производства судебной экспертизы. К производству экспертиз допускаются специалисты, прошедшие специальную подготовку и сдавшие экзамен экспертно-квалификационной комиссии. Методическое и научно-техническое руководство экспертной работой осуществляет Российский федеральный центр судебной экспертизы (РФЦСЭ). В областных центрах имеются региональные лаборатории судебной экспертизы Министерства юстиции РФ и экспертно-криминалистические подразделения (управления, отделы) в органах МВД РФ. При отсутствии или чрезмерной загруженности штатных сотрудников, а также для разрешения некоторых специальных вопросов к проведению экспертиз привлекаются сотрудники НИИ, работники учебных заведений, автотранспортных предприятий и другие лица. При поступлении в экспертное учреждение на экспертизу уголовного или гражданского дела по ДТП руководитель знакомится с материалами дела, проверяет их соответствие нормативным актам. Им определяется вид и количество экспертиз и устанавливаются сроки их проведения. Обычно по сложным делам срок экспертизы составляет до 20 дней, по простым экспертизам срок исполнения до 10 дней. Производство экспертизы руководитель письменно поручает эксперту и разъясняет под подпись его обязанности, права и ответственность. По окончании экспертизы руководитель экспертного учреждения проверяет полноту исследования и обоснованность выводов и направляет все материалы органу, назначившему экспертизу. — 21 — Руководитель экспертного учреждения может отказаться от выполнения экспертных работ только в следующих исключительных случаях: • отсутствует объект, подлежащий исследованию; • в постановлении о назначении экспертизы отсутствуют вопросы, относящиеся к предмету экспертизы; • для проведения экспертизы назначены вопросы, решение которых в данном экспертном учреждении невозможно. При невозможности проведения экспертизы в течение 20 дней руководитель своим ходатайством может продлить этот срок, согласовав его с назначившим экспертизу органом. 2.2.4. Компетенция, права и обязанности эксперта-автотехника Компетенция, права и обязанности судебного эксперта-автотехника регламентированы законом (Федеральный закон от 31.05.2001 № 73-ФЗ «О государственной судебно-экспертной деятельности в Российской Федерации»). Эксперт-автотехник дает заключение от своего имени на основании лично проведенных исследований в соответствии со специальными знаниями и несет за свое заключение личную ответственность. Заключение судебного эксперта-автотехника базируется на исследовании представленных на экспертизу материалов и является одним из доказательств по делу. В процессах по преступлениям, связанным с АТС, на этом заключении наряду с другими доказательствами базируются обвинительное заключение и приговор. Эксперт-автотехник исследует только технические аспекты ДТП. Такой анализ подразумевает изучение обстоятельств ДТП на основе физических законов без учета психофизиологических особенностей участников ДТП и эмоциональных факторов, действующих на них, а также на самого эксперта. Полностью оценивает все доказательства в совокупности суд. Под компетенцией эксперта-автотехника понимают его знания и опыт в области теории и методики экспертизы, а также круг полномочий, предоставленных ему законом, и вопросов, которые он может решать на основе своих специальных познаний. В компе— 22 — тенцию судебного эксперта-автотехника входит исследование технического состояния транспортных средств, участвовавших в ДТП, обстановки на месте ДТП, действий участников ДТП, процесса (механизма) ДТП или отдельных его стадий, а также определение технической возможности предотвращения ДТП. Исследование технического состояния транспортного средства проводится для установления причин и времени возникновения его неисправности, а также возможности ее обнаружения водителем или лицом, допустившим эксплуатацию данного АТС до ДТП. Эксперт-автотехник в процессе исследования технического состояния ТС устанавливает причинно-следственную связь между обнаруженной неисправностью и наступившим ДТП, а также определяет техническую возможность своевременного его предотвращения с учетом того состояния ТС, которое имелось на момент ДТП. Применение в этой компетенции термина «техническая возможность» указывает на то, что при исследовании решаются вопросы безотносительно к субъективному и психофизиологическому состоянию водителя. Исследуя обстановку на месте ДТП, эксперт-автотехник устанавливает параметры, характеризующие движение транспортных средств и других объектов в зоне ДТП, из которых особое внимание уделяется ширине проезжей части и обочин, характеристике сцепления шин с дорогой и сопротивления качению, наличию уклонов дороги и радиусов закруглений. В ходе исследования определяют траектории движения транспортных средств, их пересечения, условия видимости и обзорности с места водителя, а также другие обстоятельства, которые могли способствовать ДТП. При проведении САТЭ эксперт-автотехник определяет, как следовало действовать участникам ДТП с технической точки зрения для выполнения требований ПДД, положений по эксплуатации транспортных средств и других нормативных документов. Путем сопоставления фактических действий участников в ДТП с требованиями нормативно-правовых документов эксперт определяет степень соответствия им. В процессе исследования ДТП в целом или отдельных его этапов эксперт-автотехник устанавливает направления и величину сил взаимодействия между транспортными средствами при столкнове— 23 — нии или между транспортным средством и препятствием, в том числе пешеходом, при наезде. Если в постановлении следователя или определении суда не указан момент возникновения опасности для движения, то это может сделать эксперт-автотехник, применив специальные познания и опыт, на основе исследования материалов дела. Эксперт в процессе исследования определяет момент, когда какой-либо объект перестает ограничивать обзорность и водитель получает возможность увидеть другое ТС или пешехода. К компетенции эксперта-автотехника можно отнести также исследование и решение других вопросов, связанных с безопасностью дорожного движения и эксплуатацией транспортных средств, для ответа на которые необходимы специальные познания. Судебный эксперт-автотехник имеет право знакомиться с материалами гражданского или уголовного дела, относящимися к предмету САТЭ, присутствовать при допросах участников и очевидцев ДТП, в проведении осмотра ТС и следственных экспериментах, а также в других следственных действиях, задавать допрашиваемым вопросы. Эксперт-автотехник вправе заявлять ходатайство о представлении дополнительных материалов, необходимых для дачи заключения, осматривать место ДТП и транспортные средства. Свои ответы на вопросы следователя, поставленные для разъяснения заключения, эксперт вправе записывать в протокол допроса. Эксперт-автотехник не имеет права проводить исследование материалов дела, не относящихся к предмету экспертизы, самостоятельно без разрешения следователя или суда собирать необходимые для заключения исходные данные, отсутствующие в деле, изымать из дела имеющиеся данные. Он не вправе давать ответы на вопросы, относящиеся к правовой оценке действий участников ДТП, а также оценке доказательств и правовой квалификации действий участников ДТП, к установлению наличия или отсутствия вины, привлекать к экспертизе посторонних лиц. Эксперт-автотехник обязан: • руководствуясь нормами УПК РФ, дать заключение по поставленным вопросам на основании полной, всесторонней и объективной оценки результатов исследований в соответствии — 24 — со своими специальными познаниями. Эксперт несет личную ответственность за свое заключение по экспертизе и уголовную ответственность – за необоснованный отказ и уклонение от дачи заключения, за дачу заведомо ложного заключения; • перед проведением экспертизы детально ознакомиться со всеми обстоятельствами ДТП и представленными материалами дела; в случае необходимости – ходатайствовать перед следствием или судом о представлении ему дополнительных материалов и недостающих данных; • при проведении экспертизы использовать научно-технические средства, способствующие полному и всестороннему исследованию обстоятельств ДТП и технического состояния транспортных средств; • в письменной форме сообщать органу, назначившему экспертизу, о невозможности дачи заключения, если поставленные на экспертизу вопросы выходят за пределы его компетенции, имеют правовой характер или представленный на исследование материал недостаточен для дачи заключения, а восполнить его невозможно; • провести исследование представленных на экспертизу материалов, если они позволяют дать ответ хотя бы на часть поставленных вопросов; о причинах, сделавших невозможным ответ на другие вопросы, – сообщить в заключении; • обеспечить сохранность полученных на экспертизу материалов. В оговоренных в законе случаях эксперт проводит экспертизу в присутствии прокурора или следователя, а также обвиняемого и предоставляет ему возможность давать необходимые разъяснения; • являться по вызову следователя или суда для разъяснения данного им заключения. 2.2.5. Исходные материалы для экспертизы Для производства САТЭ в распоряжение эксперта органом, назначившим экспертизу, должны быть представлены материалы, достаточные для полного и объективного исследования ДТП. К основным материалам, представляемым эксперту для экспертизы, относятся: — 25 — • постановление следователя или определение суда о назначении экспертизы; • протокол осмотра места ДТП и схема ДТП; • протокол осмотра и проверки технического состояния ТС; • справка о ДТП. К материалам ДТП, представленным на экспертизу, дополнительно могут быть приобщены протоколы следственного эксперимента, протоколы допросов участников и свидетелей ДТП и другие материалы. Постановление (определение) о назначении экспертизы состоит из трех частей: вводной, описательной, заключительной. Во вводной части указывают вид экспертизы, дату и место составления постановления (определения), наименование органа и фамилию должностного лица, назначившего экспертизу, номер гражданского или уголовного дела, фамилию и инициалы подозреваемого или истца. В описательной части постановления (определения) излагают фабулу ДТП и описывают обстоятельства, связанные с объектами экспертизы. Важное значение для производства автотехнической экспертизы имеют технические данные, необходимые для восстановления механизма ДТП, к которым относятся: • координаты места и время совершения ДТП; • характеристика проезжей части и состояния ее покрытия; • тип и техническое состояние ТС, участвовавших в ДТП; • направление и скорость движения ТС и пешеходов; • расположение на дорожном полотне, длина и характер следов торможения, скольжения или качения колес; • расположение ТС, других объектов и предметов на проезжей части; • условия видимости и ограничения обзорности с места водителя в момент ДТП. В постановлении о назначении экспертизы должны быть указаны сведения о том, применял ли водитель экстренное торможение или двигался накатом, какими частями совершено соударение ТС, какой точкой ТС нанесен удар пешеходу или наезд на неподвижное препятствие. В конце описательной части постановления (определения) — 26 — дается перечисление статей УПК или ГПК РФ, которыми руководствовался следователь или судья при назначении экспертизы. Указываются статьи УК РФ об ответственности экспертов за уклонение от проведения экспертизы или за дачу заведомо ложного заключения. В заключительной части постановления (определения) указываются вид назначаемой экспертизы, учреждение и (или) лицо, которому поручено проведение экспертизы, перечисляются вопросы, поставленные на разрешение эксперта, описываются направляемые на исследование объекты и материалы. В протокол осмотра места ДТП вносят: дату осмотра; должности и фамилии лиц, участвующих в осмотре; фамилии, имена и отчества водителей и понятых; видимость в направлении движения; состояние дорожного покрытия; ширину проезжей части; характеристики обнаруженных при осмотре предметов, изъятых с места ДТП; заявления участников ДТП по существу осмотра, при их наличии; время осмотра. Протокол подписывают все лица, производившие осмотр и участвовавшие в нем. Схема ДТП представляет собой графическое изображение плана местности с нанесением обстановки происшествия и является приложением к протоколу осмотра места ДТП. На схеме фиксируются координаты транспортных средств и пешеходов после происшествия, примерное их расположение перед происшествием, особенно в момент возникновения опасности для движения, направление (траектория) движения ТС и пешехода. Графическое изображение может быть дополнено указанием климатических условий, состояния освещения и видимости, профиля дороги, ширины проезжей части. При необходимости указывают положение объектов, ограничивающих обзорность дороги с места водителя. Эксперт имеет возможность восстановить точное расположение ТС на проезжей части только в том случае, если его изображение на схеме правильно привязано к постоянным неподвижным ориентирам на месте ДТП. Схема и протокол осмотра места ДТП должны содержать четкие характеристики следов колес на покрытии. В протоколе осмотра и проверки технического состояния ТС фиксируются имеющиеся технические неисправности и повреждения, выявленные при осмотре этих средств. Указываются повреждения, — 27 — имевшиеся на ТС до ДТП. При этом указываются вид повреждений, их месторасположение и размеры. Особое внимание при осмотре уделяют проверке технического состояния агрегатов и систем автомобиля, влияющих на безопасность: рулевому управлению и тормозной системе, шинам, подвеске, системам освещения и сигнализации. Справка о ДТП содержит сведения о времени, месте происшествия, краткое его описание с указанием места жительства пострадавших и адреса лечебного учреждения, в которое они направлены, информацию об автомобилях, участвовавших в ДТП, и их водителях. Справка содержит сведения, относящиеся не только к моменту осмотра места происшествия, но и к моменту события, т. е. самого ДТП. Ее заполняет должностное лицо, осматривающее место ДТП. 2.2.6. Этапы экспертизы Экспертное исследование ДТП проводят с использованием определенных методик и приемов, сочетанием логического анализа и инженерных расчетов. В зависимости от вида ДТП, вида назначенной САТЭ, сложности и вопросов, поставленных на разрешение эксперта, исследования могут иметь различный характер, применяются различные методики, меняется последовательность и инструментарий. Однако во всём диапазоне случаев расследования ДТП процесс производства судебной автотехнической экспертизы можно разделить на следующие основные этапы: 1) ознакомление с постановлением или определением о назначении экспертизы, изучение представленных материалов дела и формулирование предстоящих задач исследования; 2) экспертиза и оценка исходных данных; 3) построение информационной модели исследуемого ДТП и выбор методов проведения экспертного исследования; 4) исследование характера повреждений ТС и сопоставление повреждений с обстоятельствами ДТП; 5) проведение расчетов, составление графиков и схем; 6) оценка проведенных исследований, уточнение первоначальной модели ДТП; 7) формулирование выводов; 8) составление и оформление заключения эксперта. — 28 — Получив постановление о назначении экспертизы, эксперт прежде всего знакомится с его содержанием, фабулой ДТП в том виде, в каком она установлена следствием (судом), и вопросами, по которым предстоит провести исследования и дать ответ. Затем эксперт анализирует материалы уголовного или гражданского дела, систематизируя их в последовательности, удобной для проведения исследования. При этом на стадии изучения материалов дела эксперт устанавливает их полноту и взаимную согласованность, достаточность для проведения экспертного исследования. Если установлено, что представленных материалов недостаточно для производства экспертизы или что в них имеются неустраненные противоречия, эксперт извещает об этом орган, вынесший постановление, и запрашивает новые материалы или ходатайствует о проведении действий, разрешающих обнаруженные противоречия. Если изучение материалов дела обнаружило наличие разных версий развития механизма ДТП, исследованию подлежат все возможные версии. В процессе исследования ДТП эксперт проводит расчеты для определения параметров движения пешеходов и транспортных средств с использованием исходных данных, принятых из постановления следователя или определения суда, и других материалов, предоставленных в его распоряжение. Эксперт не вправе изменять исходные данные, указанные в постановлении следователя или определении суда, даже если их достоверность вызывает у него сомнения. При обнаружении противоречий или возникших сомнениях в исходных материалах эксперт обязан указать на них в своем заключении. Обычно предоставленных исходных данных бывает недостаточно для проведения требуемых расчетов, поэтому определенную часть параметров и коэффициентов эксперт выбирает, пользуясь справочниками, методическими указаниями, нормативными актами, инструкциями предприятия-изготовителя, результатами научно-исследовательских работ и другими источниками. Наиболее часто эксперт самостоятельно выбирает следующие параметры и коэффициенты: • габариты автомобиля (длина, ширина, высота), колею, колесную базу, массу, координаты центра массы, минимальные радиусы поворота; — 29 — • показатели тяговой и тормозной динамичности автомобиля (максимальные скорость и ускорение, время и путь разгона и замедления при торможении, тормозной путь, время приведения в действие тормозов); • коэффициенты продольного и поперечного сцепления шин с дорогой; коэффициент сопротивления качению; • время реакции водителя; время срабатывания тормозного привода; время увеличения замедления при торможении; • КПД трансмиссии; радиусы колес; • коэффициент обтекаемости кузова ТС. Выбираемые экспертом показатели не могут в точности соответствовать условиям исследуемого ДТП, они являются осредненными и относятся к данному ДТП лишь косвенно, как наиболее вероятные. Следовательно, чем подробнее в исходных данных описаны обстоятельства ДТП, чем точнее указаны в протоколе осмотра места происшествия условия, от которых зависит возможность правильного выбора исходных данных, тем точнее расчеты и достовернее выводы эксперта. При построении первоначальной модели ДТП эксперт выявляет время и место происшествия, дорожную обстановку в зоне ДТП, направления движения транспортных средств и пешеходов и их примерное расположение на проезжей части в различные фазы происшествия. Намеченная модель уточняется путем расчетов, которые позволяют установить состоятельность исходных данных и ответить на поставленные вопросы. При проведении расчетных исследований эксперт может использовать как аналитические, так и графо-аналитические и графические методы. Эксперт может выбрать тот метод исследования, который обеспечит наиболее точный результат. Сопоставив результаты расчета с другими обстоятельствами дела, эксперт дает подтверждение достоверности исходных данных или доказывает их несостоятельность, а также позволяет установить новые доказательства. Оценивая по ходу проведения экспертного исследования полученные на основании расчетов выводы, эксперт может скорректировать первоначальную модель ДТП, а то и полностью отказаться от нее и разработать новую модель, согласующуюся с результатами первоначально проведенных исследований. — 30 — В экспертной практике исследования ДТП рекомендуется применять достаточно простые и удобные модели для практического использования, вместе с тем обеспечивающие приемлемую точность. Достигается это путем введения в расчеты эмпирических поправочных коэффициентов и формул, рекомендованных специалистами. Информационная модель ДТП обычно разрабатывается на основе фабулы происшествия, содержащейся в описательной части постановления или определения о назначении экспертизы. Нередки случаи, когда в ходе проведения исследований эксперт приходит к выводу о том, что действительный механизм ДТП отличается от описанного в постановлении. Это может быть следствием искажений в свидетельских показаниях, ошибок, допущенных при осмотре места ДТП и при осмотре транспортного средства, и т. д. Даже при самом тщательном изучении всех доказательств следователь не всегда может точно описать последовательность событий при ДТП и установить механизм его развития. Поэтому он может принять равновероятностную модель развития события в ДТП по нескольким версиям. Если в процессе производства экспертизы эксперт-автотехник приходит к выводу о том, что действительный механизм ДТП отличается от описанного следствием, то он излагает свою версию и дает объяснение возникшим расхождениям. В этих случаях эксперт проводит исследование как по исходным данным, представленным следствием, так и по уточненным в ходе экспертизы данным, отвечая на одни и те же вопросы. 2.2.7. Заключение судебного эксперта По проведенному экспертному исследованию судебный эксперт подготавливает письменное заключение, состоящее из трех частей: вводной, исследовательской и выводов. Вводная часть содержит наименование экспертизы, ее номер, наименование органа, назначившего экспертизу. В ней сообщаются сведения об эксперте, датах поступления материалов на экспертизу и подписания заключения, сроках и месте проведения экспертизы, перечисляются обстоятельства дела, имеющие значение для дачи заключения. Вводная часть содержит описание объектов, представ— 31 — ленных на экспертизу. В ней приводятся исходные данные, полученные из постановления следствия или определения суда, а также почерпнутые из материалов представленного дела; перечисляются используемые литературные источники и справочно-нормативные документы. Здесь же указываются вопросы, поставленные органом, назначившим экспертизу, на разрешение эксперта. При назначении дополнительной или повторной экспертизы приводятся мотивы их назначения, указанные в постановлении или определении. В конце вводной части указываются применяемые экспертом в исследовании методы и инструментарий. Исследовательская часть заключения эксперта содержит последовательное описание процесса исследования и его результаты, а также научное объяснение установленных фактов. Каждому вопросу, разрешенному экспертом, соответствует определенный раздел исследовательской части с выводами по нему. Исследование поставленных на разрешение эксперта вопросов может быть проведено в последовательности, обусловленной технической необходимостью. При наличии результатов следственных действий, имеющих значение для формулирования выводов эксперта, они также приводятся в исследовательской части. Завершается исследовательская часть экспертной оценкой полученных результатов. Выводы эксперта излагают в виде ответов на поставленные вопросы в той последовательности, в которой вопросы приведены в постановлении следствия или определении суда и соответственно в вводной части. На каждый из поставленных на разрешение эксперта вопросов должен быть дан ответ по существу либо указана мотивация невозможности его решения. Если в процессе исследования экспертом установлены какие-нибудь обстоятельства, способствующие ДТП, по которым ему не были заданы вопросы, то выводы по этим обстоятельствам излагаются в конце заключения. — 32 — Контрольные вопросы 1. Каковы основные проблемы организации безопасного движения на дорогах страны? 2. Каковы причины возникновения и виды ДТП? 3. Каково влияние дорожных условий на безопасность движения? 4. Каковы цели и задачи судебной автотехнической экспертизы? 5. Каковы виды судебных автотехнических экспертиз? 6. Что относится к компетенции судебного эксперта-автотехника? 7. Каковы права и обязанности судебного эксперта-автотехника? 8. Каков состав и источники выбора исходных материалов для экспертизы? 9. Из каких этапов состоит экспертное исследование ДТП? 10. Из каких частей состоит заключение судебного эксперта? 11. Какие сведения должны указываться в заключении судебного эксперта? — 33 — 3. РАСЧЕТ ПАРАМЕТРОВ ДВИЖЕНИЯ И ТОРМОЖЕНИЯ 3.1. Процесс торможения автомобиля Процесс торможения автомобиля на ровной горизонтальной дороге без учета сил сопротивления качению, аэродинамического сопротивления воздуха, влияния сил трения в трансмиссии и инерционных моментов колес может быть рассмотрен с помощью диаграммы торможения (рис. 1). Jа, м/с2 Vа, м/с V JА Т, с 0 А В t1 t2 С D t3 t1 + t2 + 0,5t3 t4 0,5t3 + t4 Рис. 3.1. Диаграмма торможения автомобиля: t1 – время реакции Рис.водителя; 1. Диаграмма торможения автомобиля: t1 – время реакции водителя; t2 – время срабатывания тормозов; t3 – время нарастания tзамедления; – время срабатывания тормозов; t – время нарастания замедления; 2 3 t4 – время полного торможения; Vа – скорость автомобиля; t4 – время торможения; – скорость автомобиля; Т – время Т –полного время торможения; Jа V – аустановившееся замедление торможения; Jа – установившееся замедление При возникновении опасной обстановки в процессе движения автомобиля со скоростью Vа водитель, обнаружив опасность для свозначения Jа. На участке диаграммы CD в промежутке времениуправления торможения с его движения (точка 0, рис. 1), переносит ногу с педали скорости полной постоянным замедлением t4 происходит подачей топлива в цилиндры двигателяснижение на педаль тормозадо(время остановки реакцииТС. водителя t1). За время срабатывания тормозов t2 колодки с накладками входят в контакт барабаном или диском тормозных Если на участке диаграммы ОВс скорость практически не меняется, то на механизмов, после чего за время t (участок ВС) происходит увеличе3 участках ВC и CD скорость автомобиля снижается и достигает нулевого ние замедления до установившегося значения Jа. На участке диаграмвремя t3 (участок ВС) происходит увеличение замедления до установившегося значения. Остановочное время от момента обнаружения водителем опасности до — 34 — полной остановки автомобиля представляет собой сумму Т 0 = t 1 + t 2 + t 3 + t 4. (3.1) мы CD в промежутке времени торможения с постоянным замедлением t4 происходит снижение скорости до полной остановки ТС. Если на участке диаграммы ОВ скорость практически не меняется, то на участках ВC и CD скорость автомобиля снижается и достигает нулевого значения. Остановочное время от момента обнаружения водителем опасности до полной остановки автомобиля представляет собой сумму ТО = t1 + t2 + t3 + t4. (3.1) Параметры торможения (время, путь, замедление) в значительной мере зависят от категории транспортного средства. Поскольку для всего широкого диапазона типов и классов автотранспортных средств (АТС) установить единые нормы оценки тормозной эффективности не представляется возможным, все АТС разбиты на следующие категории: пассажирские (М), грузовые (N), мотоциклы (L), прицепы и полуприцепы (О), которые, в свою очередь, разбиты на подкатегории, в зависимости от значения полной массы и других характеристик (Классификация автотранспортных средств, прил. А). Для применения в экспертной практике даны рекомендации по выбору значений времени реакции водителей t1 в зависимости от сложности и степени опасности дорожно-транспортной ситуации (ДТС), предшествовавшей ДТП (табл. Б.1), разработанные и рекомендованные Российским Федеральным центром судебной экспертизы (РФЦСЭ). В экспертных расчетах по рекомендациям РФЦСЭ время срабатывания тормозной системы t2 принимают в зависимости от категонормы оценки тормозной эффективности не представляется возможным, вс рии ТС равным 0,1…0,2 с (табл. Б.2). Время нарастания замедления до установившегося значения t3 АТС разбиты на следующие категории: пассажирские (М), грузовые (N ой эффективности нормы оценки не представляется тормозной эффективности возможным, невсе представляется возмож зависит от типа транспортного средства и типа тормозного привода, мотоциклы (L), прицепы (О), которые, свою очередь, состояния дорожного покрытия и массы автомобиля ующие АТС категории: разбиты пассажирские наи полуприцепы следующие (М), категории: грузовые пассажирские (N),ви принимается (М),разбит грузо в соответствии с рекомендациями РФЦСЭ (табл. Б.3). наи полуприцепы подкатегории, в которые, зависимости оточередь, значения массы други ы мотоциклы (О), (L), прицепыустановившегося в исвою полуприцепы разбиты (О),полной которые, в своюиочередь Расчетное значение замедления в экспертных характеристик (Классификация автотранспортных средств, прил. А). массы и можно определять по формуле ависимости на исследованиях подкатегории, от значения вполной зависимости массы от и других значения полной �� � = (3.2)прил. А).(3.2 = автотранспортных , икация характеристик автотранспортных (Классификация средств,JJaаприл. средств, �Э А). где ��– ускорение свободного падения, ��= 9,81 м/с2; φ – коэффициент продольного сцепления шин с Эдорогой, выбираемый Э � 2 Jа = м/с Jа = �,падения; , – ускорение свободного (3.2) хφх – коэффициен где g = 9,81 � � 2 продольного сцепления шин с дорогой, выбираемыйпадения; в зависимости о ускорение падения; – ускорение φх35–— коэффициент свободного φх – коэф где gсвободного = 9,81 м/с — состояния покрытия шин и вдорожных условий; КЭ – коэффициен я шин продольного с дорожного дорогой, сцепления выбираемый зависимости с дорогой, выбираемый от в зависим в зависимости от состояния дорожного покрытия и дорожных условий; КЭ – коэффициент эффективности торможения. Значения коэффициентов сцепления в продольном направлении φX для капитальных дорожных покрытий приведены в табл. 1. Дифференциальные предельные значения коэффициентов сцепления φX на капитальных покрытиях приведены в табл. Г.1, на переходных и низших покрытиях дорог – в табл. Г.2. Таблица 1 Коэффициент продольного сцепления шин φX для дорог с твердым покрытием Коэффициент продольного сцепления шин φX Тип покрытия дороги сухое покрытие мокрое покрытие Асфальтобетонное или цементобетонное покрытие 0,7–0,8 0,35–0,45 Щебеночное покрытие 0,6–0,7 0,3–0,4 Грунтовая дорога 0,5–0,6 0,2–0,4 Дорога, покрытая укатанным снегом 0,2–0,3 0,2–0,3 Обледенелая дорога 0,1–0,2 0,1–0,2 Коэффициент эффективности торможения есть отношение расчетного замедления, определенного с учетом величины коэффициента сцепления на данном участке, к действительному замедлению при движении заторможенного транспортного средства на этом участке дороги. Снижение эффективности торможения автотранспортного средства происходит за счет неполного использования сцепной массы автомобиля, снижения коэффициента трения в тормозных механизмах при эксплуатации. Рекомендуемые для использования в экспертных исследованиях значения коэффициента КЭ приведены в табл. 2. — 36 — Таблица 2 Коэффициент эффективности торможения Вид транспортного средства Кэ в случае торможения негруженого и полностью груженного транспортного средства при коэффициенте сцепления 0,7 0,6 0,5 0,4 Легковые автомобили и другие на их базе 1,2/1,2 1,1/1,2 1,1/1,1 1,0/1,0 Грузовые – грузоподъемностью до 4,5 т и автобусы длиной до 7,5 м 1,4/1,8 1,2/1,5 1,1/1,2 1,0/1,0 Грузовые – грузоподъемностью свыше 4,5 т и автобусы длиной более 7,5 м 1,6/2,0 1,4/1,7 1,2/1,4 1,0/1,2 Мотоциклы и мопеды без коляски 1,2/1,6 1,1/1,4 1,1/1,1 1,0/1,0 Мотоциклы и мопеды с коляской 1,4/1,8 1,2/1,5 1,1/1,3 1,0/1,1 1,6 1,4 1,1 1,0 Мотоциклы и мопеды с рабочим объемом двигателя 49,8 см3 В экспертной практике при проведении расчетов параметров торможения значения установившегося замедления Jа принимают в соответствии с рекомендациями РФЦСЭ от 1995 года, приведенными в табл. В.1 и В.2. Эти значения относятся к АТС, не оборудованным антиблокировочной системой торможения (АБС), тогда как на дорогах страны таких автомобилей становится всё меньше. В экспертизах ДТП, в которых участвовали автомобили, оборудованные АБС, можно использовать экспериментальные данные по некоторым импортным автомобилям производства Германии и Японии, представленные в табл. В.3. При расчетном исследовании ДТП часто возникает необходимость определить тормозной путь автомобиля ST до остановки ТС. Значения тормозного пути при конкретных начальной скорости движения автомобиля и дорожных условиях определяются по формулам: = SSTT = �а� ��а ;; (3.3) 37 — а , S—T = �� ���а ( ( �� ST = SSTT = = �а� ��а ; �а� (3 ���а ,, (3.4) где Va – скорость автомобиля; в формуле (3.3) скорость автомобиля ��� = (t + t + 0,5t )V + . S О 1 2 3 a подставляется в м/с; в формуле (3.4) скорость автомобиля подставля��� ется в км/ч; Ja – установившееся замедление при торможении, м/с2. � SО = (t1 + t2 + 0,5t3) �� ��� + �а ���а . 3.2. Расчет параметров движения автомобиля � Т0 = t1 + t2 + 0,5t3 + а . �а 3.2.1. Определение остановочного пути �а Т0 = t1 + tвремени и остановочного 2 + 0,5t3 + ���� а S = S + S + S + S �, ��к ����а где S1, S2, S3, S4 – путь автомобиля соответственно за время t1, t2, t3 и t4 (см. рис. 1). Va = 1,8 ∙ Ja ∙ t3 + ����а �ю , Время приведения в действие тормозной системы с учетом диаграммы торможения V (рис. 1) можно по формуле = 1,8 ∙ J ∙ tопределить + ���� �� � ��. a a 3 а Т = t1 + t2 + 0,5t3; �а� �� � �; пн н= S� время торможения – V по формуле T= ��а � �� , ю �Т� = 0,5t + t . (3.6) (3.7) аТ 4 В ;�Jа�а T �3 � ��� ST = Vдоп = �� 3,6 � � � � �, � а = , S � Остановочный путь полного торможения T а �� при подстановке ско- ���а (3 (3. . (3.5) , (3 (3. При экспертном исследовании ДТП для установления наличия ��н � ��к SО = (tу1 +водителя t2 + 0,5tпредотвратить )(V − V ) + ; технической возможности ДТП путем 3 a к ��а торможения требуется определить длину остановочного пути пол� � ного торможения SО. S = (t + t + 0,5t )�а ��к + �н ��к . О 1 2 3 ���(3.1) а Из формулы определения остановочного��� времени следует, �н ��к что остановочный путь – это расстояние, пройденное АТС за время Т0 = t1 + t2 + 0,5t3 + ; �а ТО = t1 + t2 + t3 + t4: Т0 =О t1 +1 t2 +2 0,5t3 3 + 4 н (3 (3. (3. (3. (3. (3. (3. (3. (3.3) (3.3)(3. (3.4) рости в м/с определяется по формуле �а� , (3.4) ST = ��� �(3.8) а+ S(t =+ (t��� + t2� + 0,5t )V�aa�+ + � �.. �� � � �����(3.8) t 0,5t )V О= 2 3 ����� � ���� � � �� Va = 1,8 ∙ Ja ∙ t3 + ����а �юS� О 1 1 3 к к к а ��� к � а к � � , (3. где Sк – � �� При подстановке в размерности км/ч формула для (3.8) SО = (tскорости 1 + t2 + 0,5t3)Va +�� . �а� �� расстояние, пройденное в состоянии качения, � S = (t + t + 0,5t ) + . м; Jк – замедление (3.9)п О 1 пути 2 приобретает 3 определения остановочного вид ��� ��� а � � качении, м/с2; t5 – время практике ) + � + с;а �в.а. экспертной(3.9) SSОО==растормаживания, (t(t11 ++ tt22++0,5t 0,5t (3.9)вре 3 3) Т0 = t1 + t2 +��� 0,5t3��� +а. (3.10) �а растормаживания принимают равным 0,3 с� для гидравлического приво Т0 = t1 + t2 + 0,5t3 + а . �а (3.10) Т0 =— t1 38 + t— . (3.11) привода тормозов. тормозов и равным 2t3 для пневматического 2 + 0,5t 3�а+ � ����а �а Расчетное замедление Тпри может по формуле t1 + t2 + 0,5t . определено (3.11) �� � �� 0 = качении 3 + быть SО = (t1 + t2 + 0,5t3)(Va −���� Vка) + н к ; (3.12) �� (3.4) ST =�а� а �,а� ��� ��� = ; (3.3) S а T + t + 0,5t )V + . (3.8) SО =S(t = ; (3.3) 1 2 3 a T �� ��� а ��а �а� � �� (3.3 � T�= � + t2�а�+сS0,5t )Vа ;aскорости SО = (t1время �+ а 3�� � �� .�а движения автомобиля (3.8) Остановочное учетом , 3) + � . (3.4) SО =ST(t=1 S+T t=2 ,+���0,5t (3.9) (3.4) ��� замедления ���а а ���а в размерности м/с и установившегося Ja �а� ��, �а� � = S T � � � SО = (t1 + t2 + 0,5t��� ) + . (3.9) (3.4 а � 3 а �� ��� ��� Т = t + t + 0,5t + . (3.10) = (t + t + 0,5t )V + . (3.8) S Т = t + t + 0,5t + . (3.10) а 0 1 2 3 О 1 2 3 a (3.8) SО = (t1 + t2О+ 0,5t 1 32)Va + 3 .�а��� ��� � � �)V а (t + t +в 0,5t + � км/ч . При подстановке размерности формула для(3.10) (3.8 Т0S=О t=скорости аа� �� ��3� �. a�� 1 + 1t2 + 20,5t 3+ � � � а � Т = t + t + 0,5t + . (3.11) а 0 1 2 3 S = (t + t + 0,5t ) + . (3.9) О 1 2 3 определения времени вид SОостановочного = (t1 + t2 + 0,5t +приобретает . (3.9) ���� 3) ��� ��� ���а����а а � � �� а (t t+20,5t + 0,5t Т0SТ=О t==1 + t2+t+ +�3) а�а..+ ��н � .��к t1 1+ 0,5t (3.11)(3.11) (3.9 33 + 2 а ���� ��� ��� а SО =Т0(t=1 Т+t10О t+ + 0,5t )(V − V ) + (3.12) =2 tt21 + + 0,5t t23+ 30,5t (3.10) +a 3 .+к . ��а ; (3.10) �а �а При определении пути для снижения скорости до скорости а �� ��н�� к Т = t + t + 0,5t + 0 1 2 3� �� �а ��к . ; торможения(3.12) (3.10 S = (t + t + 0,5t )(V − ��кV О впереди 1 2ТС или 3при�аaрасчетах к)а �+ � ннеполного движущегося =+tt210,5t + 0,5t t23)+ 30,5t .а.а (3.11) (3.13) SО =Т(t0 1=+Тt10t2+ + + 3++ ��� .������ (3.11) аа � формулы (3.8) и (3.9) можно представить в�аследующем виде: �а� ��� ���� � а ;t к+ 0,5t (3.3) (3.11 �н ��+ к Т S=T t= �+а �� � . � а 0 1 �� 2 3 . �� � � (3.13) SО = (t1 + t2 + 0,5t к 3) а�н ��+ �)�н + ����� �кн а к ; ��� ��� = +(tt211t+ 0,5t + ; (3.14) ++t0,5t t22+ +0,5t 0,5t )(V − V (3.12) SОО1t== )(V − V ) + (3.12) а 1+(t 2+ 3 3 a к � SОТ=0S(t )(V − V ) + ;; а (3.12) 3 a к 3 �aа �а к �� ��а � � , (3.4) ST = �н � �к ��� �н �� а к )(V − V ) + SОt2=+(t0,5t ; 1 + 3t2++ 0,5t 3;к � a ��� �� к� �н��� Т 0 = t1 + (3.14) (3.12 �� а к н к ��а � �� � �� � а+ ка н + к�� � Т = t + t + 0,5t , (3.15) S = (t + t + 0,5t ) + . (3.13) 0 1 2 3 = (t + t + 0,5t ) . (3.13) S 22 +а3)Va + ��� .. а (3.13) SО = (tОО1 + t211 S+О 0,5t = (t13+) t32��� +3 ���� 0,5t (3.8) ��� ��� � � �� а � �н ��к �н ��к �а ��к (t0,5t 0,5t ) �к� �+аизменяются . следую-(3.15) (3.13 SОиt2=(3.11) Формулы (3.10) таких ТV t11,8 + + 1 +для 3,�� � �нрасчетов 0= 3t2++ � �� = ∙ J ∙ t + ��� � , (3.16) н к ���� ��� аа 3ю = tt21 + +S0,5t taО2 =+(t330,5t (3.14) +� t23 ++0,5t (3.9) 1+ Т0 =aТt10 + ; �а)���; + ���а. ���а (3.14) щим образом: �а �н ��к ���. Т0∙ = t02+=� 0,5t + ;а; VV J∙ aОJta∙= ��� �3аню , кю3 � Т + t+ + 0,5t + (3.14)(3.16) 1 t∙+ a a==1,8 3tt1Т3+ 1,8 �� (3.18)(3.14 �� 2t���� t2ак�3+ 0,5t (3.10) � 1 н+�� �а+ �а . Т = t + t + 0,5t + , (3.15) 0 1 2 3 Т0 = t1 + t2 + 0,5t3 + , (3.15) ����а ����а� �� � н к а ==1,8 ∙Т Ja�t∙= ��. . VV �tпн �=t+�+ (3.19)(3.15 aн �Т�� ю� t,10,5t + tа23�� ++ (3.11) +3t Т++ t�0 ���� 0,5t +0,5t (3.15)(3.18) 3 + ,, 0= О 1 1 2 2 3 ����а ���� а V = 1,8 ∙ J ∙ t + ��� � , (3.16) � a ∙ Ja ∙ t3 a+ � 3 ���а �ю ,а ю Va = 1,8 (3.16) ��н � ��к V = �� � � � � , (3.19) ��� � где Vн, Vк – начальная иSконечная движения н пн = (t � +� t2∙ скорости +t В0,5t −V + ТС;;в формулах(3.12) О1,8 3)(Va� к)�, V (3.20) (3.16 доп =V3,6 а T ∙1�J a =J 3�+������ а �� ю ,��. ��а t3a�+ �� (3.18) ���� a = ∙1,8 (3.12) и (3.14) скорость ва �� формулах (3.13) и (3.15) скорость а ю Ja ∙∙ tвJ3 aм/с; +∙ ���� �� � ��. (3.18) Va =V1,8 а ю ��� �а ��к ��н ���к в км/ч. + t2∙ В+t� 0,5t . (3.13) (3.18 Vдоп = 3,6 JSОа1,8 T= (t�� � ����� �,��� (3.20) 1J 3) � �+ = ∙ + �� V ��� a a 3 а ю� а ��. �а����� , V�н �� = �� �� � ���пн (3.19) V = � , (3.19) � н � пн � 8 ∙ Ja ∙ t3 + ����а �ю � �����к �к � ����к ��а � �к�н��� ��к � �����а � �к ��� � , (3.21) t1 +�t2�скорости + 0,5t ; (3.14) (3.19 3.2.2. Определение АТС Vн =Т0�=�� � В�3�+, движения �а пн��� ��� � � В V=доп J����� ��� � � �, апо�длине (3.20) ���а��� �ю � ����� � �к ���следа � ,(3.20) (3.21) а Tможет движения быть определена �� a ∙ t3 + ����Скорость Vдоп 3,6 TАТС ���� � �� �, ����� апройденное к=� к�� к� � –∙ Jрасстояние, вJк3,6 качения, при асостоянии а �� Т + н� к, м; Jк – замедление (3.15) �аt�� 0 = t1 + 2 + 0,5t 3��� ���� В а юза S задних колес: ю Vдоп = 3,6 Jа T �с; � � � � �, практике время(3.20 ��в��экспертной � и,расстояние, м/с2; t5 – пройденное время растормаживания, в состоянии м; Jк – замедление при а (3.16)(3.16) Va = 1,8 ∙ Ja ∙ качения, t3 + ���� а �ю�, � , (3.21) � � � � � 1,8 ∙ J ∙ t + ��� � � ����� � � ���� � � � ����� � � �� � � � � a 3 а ю к ���� к J ∙ t + ���принимают ����� �кюза, � �����а � �ак ��� к� ,�привода (3.21) �� к� � аS�ю–� кравным к ��а к� к �экспертной маживания 0,3 сt +�вадля гидравлического длина следа , aм/с32; t5 –гдевремя растормаживания, практике время ю 1,8 ∙ Ja ∙с; ��ю � ��. (3.18) Va =м. ���� 3 а � ����азависимость �ю � �����применяют �к � ����вк �тех �к ��� � ����� � �к ��� �� , (3.21 �а � Va = 1,8 ∙ Ja ∙ t3 +Данную случаях, когда во время к а пройденное в состоянии качения, Jк – замедление к –ирасстояние, пневматического тормозов. ов равнымпринимают 2t3 для расстояние, пройденное в состоянии м; Jм; при при аживания равным 0,3 привода скачения, для гидравлического привода к – замедление Vн = ��� �находится �пн � �� , в конце тормозного следа(3.19) осмотра места ДТП автомобиль 2 –t5расстояние, пройденное состоянии Jпо –формуле замедление нии, ;–замедление tи5время время растормаживания, с;��� вкачения, экспертной времяпри де к2;м/с кпрактике откачении началавследа колес. В м; случаях, когда Расчетное при может быть определено растормаживания, с;до взадних экспертной для пневматического привода вм/с иSравным 2tS–ю3 замеряется В тормозов. практике время V = 3,6 J T � � � � � �, (3.20) � доп а �а �� � к2;моменту замера растормаживания, длины следа юза автомобиль был удален с места ачении, tпринимают с; вгидравлического экспертной практике ормаживания сsin для привода 5 – время cos0,3 ±быть α), (3.22)время Jравным живаниям/с принимают 0,3 сα для гидравлического привода К = g(f асчетное замедление приравным качении может определено по формуле остановки или он после торможения накатом продвинулся на не- � гидравлического астормаживания равным 0,3 са �для привода 1,83 ∙для Ja 3∙ tпринимают ���аJ�ю = � g(f ����� �тормозов. �����а � �к ��� �� ,(3.22) (3.21) Va = 2t для привода озов и равным 2t 3 + �пневматического к� кα�±���� к ��� � пневматического привода тормозов. и равным cos sinк �� α), К — 39 — пневматического тормозов. ормозов и равным 2tпри Расчетное при качении может быть определено по формуле – расстояние, пройденное в состоянии качения, м; Jк по – замедление при где Sкзамедление 3 для счетное замедление качении может бытьпривода определено формуле 2 качении, м/с ; t5 – время с; α), в экспертной практике Расчетное замедление при быть определено по время формуле =качении g(f cos αможет ± sin (3.22) Jрастормаживания, ���а � � SО = (t1 + t2 + 0,5t ST =3)Vаa ;+ ��� (3.8) (3.3) �а� + + S0,5t . (3.9) О = (t1 + t2 то, которое расстояние,Sучитывая при торможении =3)��� , экстренном Tчто ���а ���а заблокированы могут быть не только задние, � но и передние колеса, Т0 =S t1=+(tt2 ++ 0,5t + а .)V + ��� . (3.10) t2 +30,5t �а3 a Sю определяют по формуле О 1 (3.4) ��а �� ��� . �а� �а ��� (3.8) − L, + ��. (3.17) �t� S+ 0,5t Т0 = tS1ю+= (3.11) �а� (3.3) (3.9) SSTО== (tа 21; +ф t2 +30,5t���� . 3) а + ��а ��� ��� а где Sф – длина тормозного следа на схеме ДТП, м; L– колесная база � � � �� � � )(V − V ) + н � к ; SО = (t1 + t2 + Т 0,5t (3.12) (3.10) автомобиля, м. (3.4) ST = 0а =,3 t1 +a t2 + к0,5t3 +���аа . ���а а В случае определения Sю по формуле (3.17) необходимо прини�а ��к ��н����к (t + t + 0,5t=3)t1 + t2++ �0,5t . �а (3.13) (3.11) SО =от � мать Sю в зависимости )Va + ��� . а3 + ����а. (3.8) SО =1S(tф:1 2+ t2 Т+0 0,5t 3��� ��� • если Sф ≥ 2L, то Sю = Sф − L; �н ��к ��н � ��к Т0 = t1 +St2 += 0,5t (3.14) (3.12) ��; �� 3+ t2 +3�)0,5t а (tО1 + (t t21++0,5t +3)(Vаa − . Vк) + ��а ; (3.9) • если 2L ≥ Sф ≥ L, то SSюО== L; ��� ���а � �� н к • если Sф < L, то SюТ= S . , ��аа��к ��н ���к (3.15) 0 = фt1 + t2 + 0,5t3 + ���� =t(t 0,5t . а3 + ТS0О=по + t2t+ 0,5t . + передних (3.10) (3.13) 1+ 2+ 3) юза 1 длине Скорость движения АТС следа колес �а��� Sю ��� а Vaопределяется = 1,8 ∙ Ja ∙ t3 + по (3.16) ���� для варианта Sф ≥ 2L формуле а �ю , �н��� а к Т0 = t1 + t2 + 0,5t .; (3.11) (3.14) 3+ �а а ���� ��. (3.18) Va = 1,8 ∙ Ja ∙ t3 + ����а ��ю � (3.18) � � �� � t2 +3)(V 0,5ta 3−+Vкн) +к�, н � �к ; S (3.12) (3.15) О = (tТ 1 0+=t2t1++0,5t Для ДТС, в которой наезд� �ТС �на пешехода ���� произошел в процессе а ��а Vн = ��� (3.19) пн �� , торможения и автомобиль после наезда на расстояние �� ��� а �� ∙ Ja ∙)�t3переместился + к���� + 0,5t + на �юк ., (3.13) (3.16) SО = (tV1 a+=t21,8 ���В3 меньше длины юза,Vдоп скорость в�момент = 3,6 Jадвижения T �� � ���� � ���� �,а наезда Vн рассчи(3.20) ∙�аJ��a ∙ t�3 н+������ (3.18) а ��ю � ��. к тывается по формулеТ = t V+a t= 1,8 ; (3.14) 0 1 2 + 0,5t3 + �а � , (3.21) (3.19) Vкн � = ��� � ��к��� , � � �����а � �к ��� �(3.19) ����к����апн� Va = 1,8 ∙ Ja ∙ t3 + ����а �ю � �����к � �н �� к � Т = t + t + 0,5t + , (3.15) 0 1 2 3 где Sпн – путь, пройденный автомобилем���� после а В наезда, м. ��� пройденное в Vсостоянии качения, м; J – замедление при где Sк – расстояние, � � � � � �, (3.20) к � доп = 3,6 Jа T При экспертном исследовании наездов � �� �на пешеходов в услоVa = 1,8 ∙ Ja ∙ t3 + ����а �а ю , (3.16) 2 качении,виях м/с ограниченной ; t5 – время растормаживания, в экспертной время видимости, в томс;числе в темное практике время суток, � � = 1,8 ∙ Ja ∙0,3 + (3.18) ��гидравлического ∙ t3 + ����Vа � � ����� ���� ���. �к �� Va = 1,8 ∙ Jaнеобходимость aю возникает расчета скорости из условия ю растормаживания принимают равным с���� дляак�� привода кt3�допустимой к� а� к ��� � ����� а� � � , (3.21) скорость определяется видимости элементов дороги S . Допустимая привода тормозов. тормозов и равным 2t3 для пневматического Vн = ��� �В�пн �� , (3.19) при пройденное в �состоянии качения, м; Jк – замедление где Sк – расстояние, по формуле Расчетное при качении может ���быть определено по формуле качении,замедление м/с2; t5 – время практике Vдоп = растормаживания, 3,6 Jа T �� В� � � с;� в� �,экспертной (3.20) (3.20)время �а �� cos α ± sin (3.22)привода JК = g(fравным растормаживания принимают 0,3α),с для гидравлического где T = t1′ + t2 + 0,5t3 – время приведения в действие тормозов, с; � , (3.21) для пневматического привода тормозов. и� равным ���а �ю 2t �3 ����� ����к ��а �допустимой �к ���� � ����� Va = 1,8 a ∙ t3 + реакции к� к � расчетах а � �к ��� �при tтормозов ′ –∙ Jвремя водителя при скорости 1 Расчетное замедление качении может быть определено по формуле данной видимости дороги, tпри ′ = 0,3 с. где Sк – расстояние, пройденное в1 состоянии качения, м; Jк – замедление при Если водитель при наезде наJ37 пешехода или столкновении с ТС (3.22) К = g(f cos α ± sin α), 2 качении, м/с ; t – время растормаживания, экспертнойпродвинулся практике время 5 в процессе торможения отпустил педальс;и вавтомобиль растормаживания принимают равным 0,3досполной для гидравлического привода прямолинейно в свободном качении остановки, скорость перед торможением быть определена потормозов. формуле пневматического привода тормозов и равным 2t3 для может 37 Расчетное замедление при качении может быть определено по формуле — 40 — (3.22) JК = g(f cos α ± sin α), Va = 1,8 ∙ Ja ∙ t3 + ����а ��ю � ��. Vн = ��� � �пн � �� , Vдоп = 3,6 Jа T �� ���В � � � � � �, Va = 1,8 ∙�Jа ��a ∙ t3 + (3.18) (3.19) (3.20) Va = 1,8 ∙ Ja ∙ t3 + ����а �ю � �����к �к � ����к ��а � �к ���� � �����а � �к ��� �� , (3.21) (3.21) расстояние, пройденное в состоянии качения, м;качения, Jк – замедление где Sгде к –S – расстояние, пройденное в состоянии м; J –при зак к качении, м/с2; tпри растормаживания, с; врастормаживания, экспертной практикес; время медление качении, м/с2; t5 – время в экс5 – время пертной практике время равным растормаживания равным 0,3 с растормаживания принимают 0,3 с для принимают гидравлического привода для гидравлического привода тормозов и равным 2t3 для пневматипривода тормозов. тормозов и равным 2t3 для пневматического ческого привода тормозов. Расчетное замедление при качении может быть определено по формуле Расчетное замедление при качении может быть определено по (3.22) JК = g(f cos α ± sin α), формуле JК = g(f cos α ± sin α), (3.22) где g – ускорение свободного падения 9,81 м/с2; f – коэффициент 37 сопротивления качению, принимаемый из табл. 3; знак «+» при движении на подъеме; знак «−» при движении на спуске; α – угол уклона дороги, град. Таблица 3 Коэффициент сопротивления качению f при нормальном давлении воздуха в шинах для различных дорожных покрытий Дорожное покрытие и его состояние Коэффициент сопротивления качению Асфальтобетонное в отличном состоянии 0,014–0,018 То же в удовлетворительном состоянии 0,018–0,020 Гравийное покрытие 0,02–0,025 Булыжник 0,025–0,030 Грунтовая дорога, сухая 0,025–0,030 То же после дождя 0,05–0,15 Песок сухой 0,15–0,30 То же влажный 0,08–0,10 Снежная дорога 0,025–0,03 Лед 0,015–0,02 С учетом скорости движения ТС в момент наезда на пешехода или столкновения с другим ТС (3.19) и длины следа юза до места — 41 — наезда (столкновения) Sю′ может быть определена скорость ТС перед столкновением по формуле (3.23) V = 1,8 ∙ J ∙ t + ����а ��ю � ��н� , (3.23) Va a= 1,8 ∙ Jа а∙ t3 3+ ����а �� (3.23) ю � �н , ������� где Sю′ – длина тормозного до наезда (столкновения), м; Vа = 1,8 ∙ Ja следа ∙ t3 + ����� �, (3.24) � ��� �������� � �, ����� V = 1,8 ∙ J ∙ t + �� � (3.24) а a 3 � � VН – скорость при наезде (столкновении), определяемая по форму� ле (3.19), км/ч. В ситуациях, когда после наезда или столкновения ТС двигалось с боковым скольжением и разворотом, скорость движения ТС с учетом расстояния бокового заноса Sy и угла разворота вокруг оси, проходящей через центр переднего или заднего мостов, β в радианах, � (3.23) a = 1,8 ∙ Jа ∙ t3 + ����а ��ю � �н , определяется поVформуле Vа = 1,8 ∙ Ja ∙ t3 + ������ ��� � ������� � �, (3.24) (3.24) где а, b – расстояния от центра массы ТС до оси передних и задних колес соответственно, м; значения а, b, L для отечественных ТС приведены в прил. Е; φy – коэффициент сцепления в поперечном направлении, φy = 0,8φx; φx – коэффициент сцепления в продольном направлении. Перекрестное столкновение транспортных средств часто сопровождается сложным движением, при котором центры масс О1 и О2 перемещаются под углами γ1 и γ2 по отношению к первоначальному направлению на расстояние SПН1 и SПН2, а автомобили разворачиваются вокруг осей, проходящих через центры масс, на углы ε1 и ε2 (рис. 2). Скорости движения ТС при перекрестном столкновении Рис. 3.2. Схема перекрестного столкновения транспортных средств (рис. могутперекрестного быть определены с применением закона сохранения Рис. 3.2. 2) Схема столкновения транспортных средств количества движения: (3.25) (3.25) �� �� � �� ���� cos γ� � �� �� �� cos γ� ; (3.25) �� � � � �� �� cos γ� � �� �� cos γ� ; (3.26) �� �� � �� ���� cos γ� � �� �� �� cos γ� , (3.26) (3.26) �� � � � �� �� cos γ� � �� �� cos γ� , где m1 и m2 – расчетные массы ТС № 1 и�� №�2,� кг; m = m01 + nп1mп; (3.27) ���� � ������ ���н� ���������� ��; 1 �� �; в ТС № 1 и № (3.27) � m2 = m02 + nп2mп; �n�п1�и ����� nп2 – число 2; � ���н�пассажиров �� mп = 75 движения кг – расчетная • скорость второгомасса ТС пассажира, кг; V1 и V2 – скорости • скорость движения второго ТС № 1 и № 2 достолкновения столкновения, км/ч; V1′ и V2средств ′ – скорости Рис. движения 3.2. СхемаТС перекрестного транспортных ��� �� �� движения ТС № 1 и�� ��№�2����� после столкновения, км/ч. ���н� �������� �; (3.28) �� �; � (3.28) �� � ����������н� �� � � � �� �переднего � � �� �� cos � cos γ� ; –� �расстояния отγ� осей и заднего(3.25) мостов где a и b ; а и b � где a1 1 и b1;1 а2 2 и b2 2 – расстояния от осей переднего и заднего мостов � � ��центров �� cos γ� — � �� �� м; cosLγ� ,и L – колесная (3.26) � �их база автомобилей № 1 и №�2� �до массы, — 42 автомобилей № 1 и № 2 до их центров массы, м; L 1и L 2– колесная база автомобилей № 1 и № 2, �м.� � ����� �� � ��������; автомобилей № 1 и № 2, м. � �н� � � � 1 2 (3.27) Va = 1,8 ∙ Jа ∙ t3 + ����а ��ю � �н , Vа = 1,8 ∙ Ja ∙ t3 + ������ ��� � (3.23) ������� � (3.24) �, Рис. 3.2. Схема перекрестного столкновения транспортных средств Рис. 3.2. Схема перекрестного столкновения транспортных средств Рис.3.2. 2. Схема Рис. Схемаперекрестного перекрестногостолкновения столкновениятранспортных транспортныхсредств средств � ��� cos γ� движения ; �вначале � �� � �определяются � �� cos γ� � �� По формуле (3.24) скорости ТС (3.25) (3.25) �� �� � �� ��� cos γ� � �� ��� cos γ� ; � � cos γ , после столкновения:�� �� ����� (3.26) ����� ���� ����� cos cos γγ�� � γ� ; � (3.25) �� �� � ��cos � �� �� cos γ � �� ��� cos γ� , (3.26) �� �� первого • скорость движения �ТС � (3.26) �� �� � �� �� cos γ� � ��� � ���cos � γ� , (3.27) ���� � ������ ���н� ������������; � � (3.27)(3.27) �� � � ������ ���н� � ��� �� �� �; �� � ������ ���н� � • скорость движения второго ТС ТС • скорость движения второго • скорость движения второго • скорость движения второгоТС ТС �� �� (3.27) �; ��� �� �� (3.28) (3.28) ���� � ������ ���н� ��� ������������ � �;, � � �; �; (3.28) ���� ����� ���н� (3.28) ��������� �н� � � � ���� где a и b , а и b – расстояния от осей переднего и заднего мостов 1 1 2 2 где a1 и b1; а2 и b2 – расстояния от осей переднего и заднего мостов –расстояния расстояния от осей осей переднего мостов 2 № иa1 bи1; bа12; аи2 № bи21b–и от переднего мостов где где a1автомобилей 2 до их центров массы, м; L1 ииLи2заднего –заднего колесная автомобилей № 1 и № 2 до их центров массы, м; L 1 и L2 – колесная база и L – колесная база автомобилей № 1 и № 2 до их центров массы, м; L база автомобилей № 1 и № 2, м. автомобилей № 1 и № 2 до их центров массы, м; L1 1 и 2L2 – колесная база автомобилей № 1подстановкой и№ 2, 2,м.м. значений скоростей V’1 и V’2 в уравнения Затем автомобилей и№ автомобилей № 1№и1№ 2, м. моментов количества движения (3.25) и (3.26) рассчитывают скорости движения ТС перед столкновением: 39 39 39 • скорость движения первого ТС �� � �����φ� ��� cos γ� ��п�� � ��� �� �� �� � �����φ� ��� cos γ� ��п�� � ��� �� �� • скорость движения второго ТС �� � �� cos γ� ��п�� � ��� �� �� ��; (3.29) (3.29) � �� cos γ� ��п�� � ��� �� �� ��. (3.30) �� — — 43 �� �� Va = 1,8 ∙ Jа ∙ t3 + ����а �ю� � �����а �ю� � ������� � �� ��а ��� � ������� , (3.31) �� � �����φ� ��� cos γ� ��п�� � ��� �� �� �� � �� cos γ� ��п�� � ��� �� �� �� ••скорость движения второго ТС ТС скорость движения второго �� � � ��; (3.29) �� � � � �� �� � � � γ� ��п�� � �� ����� cos γ� ��п�� � ������������; (3.29) �� � ����φ � ���� � cos �� �� �����φ (3.30) �� ��. (3.30) � � cos γ� ��п�� � ��� � cos γ� ��п�� � � � � • скорость движения второго схемы ТС Если при составлении ДТП установлено, что следы юза Va = 1,8 ∙ Jа ∙ t3 + ����а �ю� � �����а �ю� � ������� � �� ��а ��� � ������� , (3.31) �� � � имеют разрывы, то скорость �� движения ТС перед торможением мо� �� �� �� � �����φ� ��� cos γ� ��п�� � � �� cos γ� ��п�� � � � ���. (3.30) �� �� ∙ t3формуле + ������ю.л φлев � �ю.пр φпр �, (3.32) Va = 1,8 ∙ Jсрпо жет быть определена Va = 1,8 ∙ t'3 + ������ φ� � ��ю��φ���� ��а���� �� �, ������� , (3.33) (3.31) Va = 1,8 ∙ Jа ∙ t3 + ���� ю� ������ ю� � (3.31) а �ю� � ����� а �ю� � � �а а ��ап ��аз � где Sю1, Sю2V–=длина следовt2юза, –�время оттормаживания, с; λ – + 0,5tм; + , (3.34) 3) tφ 1,8 D ∙ Jбср= ∙(t't31 ++ � ����� � ап �ю.пр (3.32) ���5 лев ��� �вз φпр �, a ю.л степень растормаживания. � � � �� ��� � а а ап аз = (t'∙1t'+3 + t2 ������ + 0,5t3 −ю� t2пφ−� t� + � VaD=б 1,8 � �� 3п)�ю� φ �,�, ��� � ��� ю� �а� ��ап ��аз � (3.35) (3.33) ап аз �а где t'1 – 3.3. времяРасчет реакции водителя для данного расчета, 1 = 0,3 с; t2п – время (t' + , t'автомобиля (3.34) Dб =параметров 1 + t2 + 0,5t3) торможения ��� ���ап �вз нарастания замедления до срабатывания тормозов переднего ТС, с; t3п – время сцепления при разных коэффициентах � � � �� ��� � (3.35) Dб = (t'1 + t2 + 0,5t3 − t2п − t3п) а + а ап аз , ��� ���ап �аз установившегося значения переднего ТС, с. При совершении ДТП торможение �� � �ТС может осуществляться �� � � � � � �����φ γ� для �вопросы � ��t'1cos γ� �� � � � ���; (3.29) �� � ��п�� � �� � cos где t'при время реакции водителя данного = 0,3 с; tп�� Контрольные 1 – 2п – время �расчета, �� � различных коэффициентах сцепления под колесами. Различ- Как тормозов определяется замедление – время нарастания до срабатывания переднего ТС,с при с;дорогой t3пторможении? ные1.условия сцепления шин могут быть позамедления бортам, на- • скорость движения второго ТС 2. Какпри определить скорость движения ТС по длине следа торможения? установившегося значения переднего ТС, с. пример движении правыми колесами по обочине, или на от��� �� �� �� � � определяется скорость движения ТС � при в разных дельных дороги. ��участках ���φ γ� ��п�� � ��торможении cos γ� ��п�� � � � ���. (3.30) �� 3.� Как Контрольные вопросы � �� � cos �� �� В том случаеикогда правые при и левые колеса скользят по поверхноусловиях сцепления при прерывании торможения? 1. Как определяется замедление торможении? сти 4. с разными коэффициентами сцепления, скорость перед тормо- � скорости движения по������ длине бокового � 2.VКак определить ТС по следа торможения? =Определение 1,8 ∙ J ∙ t +скорость ��� �движения � ����� �ТСдлине � �следа � �� ��� � ������ , (3.31) a а 3 а ю� а ю� � � а жением может определена по формуле скольжения и углу быть разворота ТС. движения 3. Как определяется скорость ТС при торможении в разных ��� �� �� ��� �� �(3.32) � ����� = 1,8 ∙ J ∙ t + φcos �ю.пр φпр �, V � a ср 3 ю.л лев γ� 5. Определение безопасной дистанции меду � � ���φ �� cos γ � � � ��; (3.29) (3.32) �условиях �� � сцепления � � �и при прерывании � п�� �ТС. � �� п�� � торможения? �� �� где J6.ср Определение – среднее расчетное замедление при торможении на данном скорости ТС, соответствующей видимости на Va = 1,8движения ∙ t'3 + ������ � �ю� φ (3.33) 4. Определение скорости движения ТС ю� поφ�длине следа � � �бокового ю� �� �, • скорость движения второго ТС 2 участке дороги, м/с , J = 0,5g(φ + φ ); φ , φ – коэффициенты дороге. ср лев пр лев� пр скольжения и углу разворота ТС. �а �а ��ап ��аз � сцепления под левыми и(t'правыми Sю.л, Sю.пр +��0,5t + , – длина (3.34) Dб =скорость �колесами; �� � � сле1 + t�� � 3) 7. Как �� определяется ТС перед столкновением �вз п�� ���φ γ� �� � 2 �движения � ��� �ТС. cos��� γ ап�� � � � ���.с(3.30) �� � �5. � � � cos п�� � Определение безопасной дистанции меду �� �� дов юза под левыми и правыми колесами, м. � применением закона сохранения количества движения? � �а� ��ап ���аз � 6. Определение скорости движения ТС,3 последовательно соответствующей Если же торможение происходит по несколь− t2п − t3п) а + видимости , на (3.35) Dб = (t' 1 + t2 + 0,5t ��� ���ап �аз � , (3.31) �� 1,8 поверхностям ∙ Jа ∙ t3 + ����а �дороги � ����� � � ������ � � ��� � ������ Va =ким (например, по трем участкам с различдороге. ю� а ю� � � а 4. ИССЛЕДОВАНИЕ НАЕЗДА НА ПЕШЕХОДА где t'1 – время реакции водителя для данного расчета, t'1 = 0,3 с; t2п – время ным коэффициентом сцепления: φ1, φ2, ТС φ3), перед то скорость движения 7. Как определяется скорость движения столкновением с ∙ Jср ∙можно t3 переднего + ������ φлев �–ю.пр φпр �,нарастания замедления (3.32) Va = 1,8 ю.л время до срабатывания тормозов ТС, с;по t� перед торможением определить 3пформуле применением закона сохранения количества движения? 40 установившегося переднего ТС, Va значения = 1,8 ∙ t'3 + φ� с. � �ю� φ� � �ю� �� �, ������ю� (3.33)(3.33) где t3′ – время нарастания замедления при торможении в условиях Контрольные вопросы � 4. ИССЛЕДОВАНИЕ НАЕЗДА ) а + , (3.34) D = (t'1 + t2 + 0,5t сцепления 1-гобучастка дороги,3 ��� с; Sю1, ��� Sю2ап,�вз Sю3 – длина следов юза 1. Как определяется замедление при торможении? на первом, втором и третьем участках, м; φ1,�аφ2, φ�3а�– ��апкоэффициенты ���аз � t2 + 0,5t3движения −40t2п − t3п)ТС по + длине , (3.35) Dб = (t'1 +скорость 2. Как определить ��� ���ап �азследа торможения? сцепления на первом, втором и третьем участках. 3. Как определяется движения ТСt'1при торможении в разных где t'1 – время реакции водителяскорость для—данного расчета, = 0,3 с; t2п – время 44 — � � ��аз � НА ПЕШЕХОДА а ��ап условияхтормозов сцепления и при прерывании время нарастания замедления до срабатывания переднего ТС, с; t3п –торможения? 4. Определение скорости ТС по длине следа бокового установившегося значения переднего ТС,движения с. �� � �����φ� ��� cos γ� ��п�� � ��� �� �� �� � �� cos γ� ��п�� � • скорость движения второго ТС 3.4. Расчет безопасной дистанции �� � � ��� �� �� �� ��; (3.29) �� � � � � � проведении �����φ γ� ��п�� � исследований � �� cosпопутных γ� ��п�� столкно� � � ���. (3.30) �� �При � ��� cosэкспертных �� �� вений ТС определяют безопасную дистанцию между ними, соответствующую скорости их движения и дорожным условиям. ����� � �� ������� , (3.31) � �� �� а �ю� � ������� � �� �� ∙ Jа ∙ cos t3 + γ���� �������� a = 1,8 �� а �ю� а � �� � � �впереди, ��; (3.29) �� � ��V���φ �� � � � п�� � cos γ� �� п�� � включатель Если автомобиль, движущийся имеет �� �� стоп-сигнала приводе тормозов, безопасная дис- (3.32) 1,8 ∙ Jср ∙ t3ТС + ������ Vaв=пневматическом ю.л φлев � �ю.пр φпр �, • скорость движения второго танция между ТС, движущимися с одинаковой скоростью, может Va формуле = 1,8 ∙ t'3��+�������� φ� � �ю� φ� � �� �ю� (3.33) � �� � �� � �� � �, быть определена по ���φ � �ю� ��. (3.30) �� � �� � ��� cos γ� ��п�� � � cos γ� ��п�� � �� Dб = (t'1 + t2 + 0,5t3) �а ��� + �а� ��ап ��аз � ���ап �вз , �� (3.34) (3.34) � ������� , (3.31) Va = 1,8 ∙ Jа ∙ t3 + ����а �ю� � �����а �ю� � ������� � ��� ��а ��� � � �� ���аз � с; J , а где t1′ – время реакции для данного расчета, ап + а t1ап′ = 0,3 , (3.35) Dб = (t'водителя 1 + t2 + 0,5t3 − t2п − t3п) ��� ���ап �аз Jаз – расчетные замедления для торможения переднего и заднего ТС (3.32) Va = 1,8 ∙ Jср ∙ t3 + ������ю.л φлев � �ю.пр φпр �, где вt'1данных – время реакции условиях, водителя м/с для2. данного расчета, t'1 = 0,3 с; t2п – время дорожных Va = 1,8 ∙переднего t'стоп-сигнала φ φ� непосредственно � нарастания �ю� �� �, (3.33) 3 + ������ Если включение от ю�происходит –ю� время замедления до срабатывания тормозов ТС, с;�t� � 3п тормозной педали, то допустимая дистанция � �а� ��ап ��аз � до движущегося впеустановившегося ТС, с. = (t'1 + t2переднего + 0,5t3) а + , (3.34) Dбзначения ��� реди ТС определяется по формуле ���ап �вз Контрольные вопросы � � � �� ��� � (3.35) Dб = (t'1 + t2 + 0,5t3 − t2п − t3п) а + а ап аз , (3.35) ��� ���ап �аз 1. Как определяется замедление при торможении? где t'1 – время водителя для данного расчета, t'1 = 0,3 t2пс;–t2пвремя где2.t1Как ′ –реакции время реакции водителя для данного t1′ =с;0,3 – определить скорость движения ТС порасчета, длине следа торможения? времятормозов срабатывания тормозов ТС,нарастания с; t – время нараста- до – время замедления срабатывания переднего ТС, с;переднего t3пдвижения 3. Как определяется скорость ТС 3п при торможении в разных ния замедления до установившегося значения переднего ТС, с. установившегося значения переднего ТС, с. условиях сцепления и при прерывании торможения? Контрольные вопросы вопросы 4. Определение Контрольные скорости движения ТС по длине следа бокового 1. Как определяется замедление торможении? 1. Как определяется замедление торможении? скольжения и углу разворота ТС.при при 2. Как определить скорость движения ТС по длине следа тормо2. Как5.определить скорость движения ТС по меду длинеТС. следа торможения? Определение безопасной дистанции жения? 3. Как определяется скорость движения ТС разных Определение скорости движения ТС, соответствующей на 3. 6. Как определяется скорость движения ТСпри приторможении торможениивввидимости разусловиях сцепления и присцепления прерывании торможения? ных условиях и при прерывании торможения? дороге. Определениескорости скорости движения движения ТС ТС по следа бокового 4. 4. Определение по длине длине следастолкновением бокового 7. Как определяется скорость движения ТС перед с скольжения и углу разворота ТС. скольжения и углу разворота ТС. применением законабезопасной сохранения количествамеду движения? 5. Определение дистанции ТС. 5. Определение безопасной 6. Определение скоростидистанции движениямеду ТС, ТС. соответствующей видимости на дороге. 6. Определение движения НАЕЗДА ТС, соответствующей видимости на 4.скорости ИССЛЕДОВАНИЕ НА ПЕШЕХОДА 7. Как определяется скорость движения ТС перед столкновением дороге. с применением закона сохранения количества движения? 7. Как определяется скорость движения 40 ТС перед столкновением с — 45 движения? — применением закона сохранения количества 4. ИССЛЕДОВАНИЕ НАЕЗДА НА ПЕШЕХОДА 4.1. Причины наезда автомобиля на пешехода и задачи экспертного исследования 4.1.1. Причины наезда на пешеходов Расследование происшествий, связанных с наездом ТС на пешехода, проводится с определением наличия у водителя технической возможности предотвращения ДТП путем экстренного торможения или объезда препятствия. Выводы по данному вопросу, полученные в экспертизе, позволяют установить причинную связь между действиями участников ДТП, выполнением ими требований ПДД РФ и наступившими последствиями, т. е. установить лицо, виновное в совершении рассматриваемого ДТП. Полученные экспертным путем выводы о наличии (или отсутствии) у водителя технической возможности предотвратить наезд на пешехода должны быть достаточно обоснованными и соответствовать представленным эксперту материалам уголовного или гражданского дела. Технической возможностью предотвратить наезд на пешехода считается возможность избежать наезда путем изменения режима движения ТС, в частности путем торможения. Причинами наездов на пешеходов могут быть следующие действия участников движения: • пешеходы не соблюдают требования ПДД в ДТС, в которой у водителя отсутствует техническая возможность предотвратить наезд; • водители не соблюдают требования ПДД в дорожной обстановке, в которой пешеход имеет преимущество на движение; • водитель применил неправильный прием управления ТС, что привело к потере управления и выезду на путь движения пешехода; • на дороге сложилась неблагоприятная обстановка, созданная другими участниками движения, вынудившая водителя применить приемы управления, вызывающие потерю контроля за движением ТС и произвольный выезд на путь следования пешехода; — 46 — • внезапное появление неисправности ТС, приводящее к отклонению его от направления движения или лишающее водителя возможности своевременно снизить скорость, остановиться или совершить маневр для предотвращения наезда. Наиболее часто опасная обстановка на дороге возникает в следующие моменты: • пешеход движется к проезжей части или по ней, не замечая приближения ТС, и может попасть на его полосу движения; • пешеход находится в непосредственной близости от полосы движения ТС, не замечая его приближения, а его дальнейшие намерения неопределенные; • пешехода, находящегося на проезжей части, к перемещению в опасном направлении вынуждают действия другого ТС; • пешеход, находясь на проезжей части, ведет себя неуверенно, вероятные его действия неопределенны; • вблизи полосы движения ТС находятся увлеченные играми дети, которые могут попасть на полосу движения ТС к моменту сближения с ними; • дети дошкольного возраста без присмотра взрослых находятся на близком расстоянии от полосы движения ТС, что не исключает возможности попадания их на проезжую часть дороги за время приближения к ним ТС. 4.1.2. Виды наезда на пешеходов Все происшествия, связанные с наездом ТС на пешехода, делят на группы по следующим признакам: • по направлению движения пешехода – наезд на пешеходов, двигавшихся: –– в поперечном направлении справа или слева по отношению к ТС; –– в продольном направлении попутно или встречно; • по характеру движения пешехода – наезды: – на пешеходов, двигавшихся с постоянной скоростью; – на пешеходов, изменявших темп движения; – на неподвижных пешеходов; — 47 — • по характеру движения ТС – наезды: – с постоянной скоростью; – в процессе торможения или наката; – при движении с заносом и разворотом; • по месту удара – наезды при ударе: – передней частью ТС; – боковой поверхностью ТС; • по характеру удара: –– наезды при блокирующем ударе (удар, при котором тело пешехода на некоторое время фиксируется по отношению к участку, которым был нанесен удар, т. е. приобретается скорость ТС); –– наезд при скользящем ударе (удар, при котором тело пешехода смещается по отношению к воздействующей на него части ТС); –– переезд через тело пострадавшего; –– сжатие его между ТС и другим объектом; • по ограничению обзорности и видимости – наезды: –– при неограниченных видимости и обзорности; –– при ограничении обзорности неподвижным объектом, встречным или попутным ТС; –– при ограниченной видимости (темное время суток, туман, снегопад, ослепляющее действие источников света и т. п.). 4.1.3. Экспертное исследование движения транспортного средства и пешехода перед наездом Проведение экспертного исследования наезда ТС на пешехода состоит в определении взаимного расположения ТС и пешехода до наезда в различные моменты времени, оценке действий участников происшествия в сложившейся дорожной обстановке во всех деталях с точки зрения соответствия требованиям ПДД. В процессе экспертного анализа наезда на пешехода наиболее важно установить момент времени, когда: • водитель имел объективную возможность обнаружить, что пешеход может оказаться на полосе движения ТС. В этом случае сопоставление расстояния, отделявшего ТС от места наезда, с его остановочным путем позволяет установить наличие у водителя технической возможности предотвратить наезд путем остановки ТС; — 48 — • ТС находилось от пешехода на расстоянии, равном остановочному пути, и водитель еще имел техническую возможность остановиться до места наезда. При движении пешехода в поперечном направлении имеет значение момент, когда водитель, уже не имевший технической возможности остановиться до места наезда, имел еще возможность пропустить пешехода перед ТС путем своевременного снижения скорости. Взаимное расположение ТС и пешехода в указанные моменты времени можно установить, зная следующую информацию: • направление движения пешехода по отношению к траектории движения ТС; • время движения пешехода с момента, когда водитель имел объективную возможность обнаружить опасность, до момента наезда или расстояние, которое преодолел пешеход за это время, и скорость его движения; • направление движения ТС и занимаемую им полосу; наличие или отсутствие других ТС на проезжей части; скорость их движения и боковой интервал; • скорость движения ТС перед происшествием; • перемещение заторможенного ТС до места наезда и после наезда; • эффективность действия тормозов в данных дорожных условиях, оцениваемую по замедлению экстренного торможения. Обстоятельства, связанные с движением ТС, могут быть установлены как следственным путем, так и на основании результатов экспертного исследования места происшествия и ТС. Обстоятельства, связанные с действиями пешехода, выявляют только следственным путем. В данном учебном пособии ограничимся рассмотрением методик экспертного исследования наездов ТС: • на пешеходов при движении с постоянной скоростью; • на пешеходов в процессе торможения ТС; • на пешеходов, двигавшихся по отношению к ТС в поперечном направлении (справа или слева); • на пешеходов, двигавшихся встречно или попутно в продольном направлении; — 49 — • при неограниченных видимости и обзорности; • при ограничении обзорности неподвижным объектом, встречным или попутным ТС; • при ограниченной видимости (темное время суток, туман, снегопад, ослепляющее действие источников света и т. п.). При этом во всех указанных вариантах наезда рассматриваются наезды на пешехода передней или боковой частью ТС. 4.2. Исследование наезда на пешехода при неограниченной видимости и обзорности с места водителя Наезды транспортных средств на пешеходов происходят как из-за несоблюдения ПДД пешеходами, так и водителями. При внезапном появлении пешехода, стоящего у края проезжей части, на близком расстоянии перед ТС водитель, хотя и применивший экстренное торможение, не всегда может предотвратить наезд. Известны случаи, когда водитель отвлекается от контроля за движением и может несвоевременно обнаружить опасность и с запаздыванием прибегнуть к мерам предотвращения наезда. В случаях, когда водитель видит пешехода на проезжей части, но продолжает движение в надежде «проскочить» мимо него, не задев, или рассчитывает на ответные действия пешехода, надеясь, что тот сам обезопасит себя, для принятия адекватных мер не остается времени. В итоге, применив торможение с запозданием, водитель теряет техническую возможность пропустить пешехода либо остановить ТС на безопасном расстоянии от линии его движения. При рассмотрении наездов, произошедших в условиях неограниченной видимости и обзорности, исследование наличия у водителя технической возможности предотвратить торможением наезд на пешехода, движущегося в поперечном направлении может быть решено путем: • сравнения времени движения пешехода от момента возникновения опасности для движения до момента наезда со временем, необходимым водителю для приведения в действие тормозов автомобиля или для его остановки; — 50 — • сравнения удаления ТС от места наезда в момент возникновения опасной обстановки и остановочного пути; • сопоставления положения пешехода в момент нахождения ТС от места наезда на расстоянии, равном остановочному пути, с положением пешехода в момент возникновения опасной обстановки. Для исследования наличия у водителя технической возможности предотвратить наезд на пешехода необходимы следующие исходные данные: • видимость дороги, пешехода и других объектов, создающих препятствие для движения по ней ТС во время происшествия; • тип и состояние покрытия проезжей части; продольный профиль дороги; • размеры проезжей части, организация движения ТС и пешеходов в месте происшествия; • данные о следах торможения, оставленных на проезжей части ТС, совершившим наезд; • расположение места наезда по ширине и длине проезжей части, а также относительно следов торможения, зафиксированных на проезжей части, или других объектов; • скорость и характер движения ТС перед наездом (юзом, с заносом, с поворотом, углом разворота); • данные о действиях водителя непосредственно перед наездом (применял ли торможение или двигался накатом, тормозил ли он до полной остановки ТС или растормаживал и т. д.); • данные о пешеходе и его действиях: возраст и пол, направление и темп движения, время, затраченное на остановки при движении; • путь пешехода с момента, когда водителю следовало применить меры к торможению, до момента наезда; • данные с осмотра технического состояния ТС и об обнаруженных при осмотре неисправностях; степень загрузки ТС; • видеоматериалы, фотоснимки и схема места ДТП; • сведения о том, какой частью ТС был совершен наезд (передней или боковой), и о расположении на поверхности ТС места, которым был нанесен удар. Исходные данные для проведения САТЭ устанавливаются в ходе следствия или в судебном заседании и являются неотъемлемой частью постановления (определения) о назначении экспертизы. — 51 — В действиях эксперта имеются ограничения, согласно которым или имеет с подстановкой на рисунке выбрать параметровисходные данные из он не право указанных самостоятельно �П ��� ��� ∆� ��� представленных ему материалов уголовного � ,дела. Поэтому поста(4.89) �уд ��� �уд ��� �∆�� новление следователя или определение суда являются для эксперта где ∆'х = ∆х + Sа2; Sа2 – путь, пройденный автомобилем № 2 из положения I в основным источником получения исходных данных, тем более если положение II (рис. 4.13) и определяемый из зависимости (4.90); SП – в этих материалах имеются противоречия или неоднозначности. пройденный пешеходом путь с момента входа в зону обзорности до момента Ознакомившись с исходными данными, эксперт выбирает панаезда, определяемый по формуле (4.91): раметры и коэффициенты, необходимые для расчетных исследова� (4.90) Sa2 = S'П �� �П ний, с учетом рекомендаций, выработанных в экспертной практике. �П Для уточнения обстоятельств . строится масштабная схема (4.91) SП = SДТП уд ��� с использованием схемы происшествия, исходных данных из постаИз совместного решения уравнений (4.90), (4.91) и (4.89) получим новления о назначении экспертизы, технических данных ТС. При независимость для определения удаления ТС от места наезда в момент появления обходимости для уточнения данных производится выезд на место ДТП. неограниченной обзорности пешехода Sуд, описываемое уравнением (4.92). а) 4.2.1. Исследование наезда при движении автомобиля I' без торможения VП Iи применяемую методику эксРассмотрим последовательность Va2 пертного исследования наезда на пешехода, на проезay ∆вышедшего x жую часть справа в поперечном направлении, передней частью ТС, Va1 а) I •А движущегося с постоянной скоростью (рис. 3, а). S уд a1 а) ax Va Sуд а) Va Sуд × Va Va ∆y ∆y б) Va Va Sуд б) а) VVПa1 × VП Va2 ∆y II ∆y б) ∆y ly Sуд Е б) SПII A ly VП SП Va Sуд б) lx Va Sуд lx Sуд В × × S'П ly VП II' С SП VП SП ly ly III lx Sуд SП ×D III' lx × ∆y 86 Vп × SП Vп SП ∆y Рис. 4.1. Схема наезда на пешехода, вышедшего на проезжую часть справа в × Рис. 3. Схема наезда на пешехода, вышедшего на проезжую часть справа поперечном направлении, ТС, движущимся с постоянной скоростью: а – Vп Схема SП на пешехода, ∆y в поперечном направлении, ТС, движущимся с постоянной скоростью: Рис. 4.1. наезда вышедшего на проезжую часть справа в × передней частью; б – боковой частью; × –×место наезда а– передней частью; б– частью; – место наездаа – поперечном направлении, ТС,боковой движущимся с постоянной скоростью: Vп SП ∆y ема наезда на пешехода, вышедшего напередней проезжую часть справа в частью; б – боковой частью; × – место наезда — 52 —��П, = Т П ом направлении, ТС, движущимся с постоянной скоростью: а – 3,6 П ема наезда на пешехода, вышедшего на проезжую часть справа в ���П передней частью; б – боковой частью; × – место наезда ом направлении, ТС, движущимся с постоянной скоростью: аТSП–УД= =3,6 T,П, ����П � (4.1) (4.2) (4.1) × часть справа в a пешехода, вышедшего на проезжую Рис. 4.1. Схема наездаVна ly поперечном направлении, движущимся с постоянной а– С учетом заданной вТС, постановлении или определениискоростью: о назнаа) чениипередней экспертизы скорости пешехода и пройденного по наезда проезжей частью; б – боковой ×V – Пместо ∆y частью; SП уд части пути определяют время егоSдвижения от момента возникновения опасности до момента наезда по формуле ТТПП==3,6 3,6· б) �П �П ,, (4.1) (4.1) × где SП – расстояние, V которое преодолел момен�� пешеход от заданного a (4.2) SУДS= l уд ��� TП, x та до момента наезда, м; VП – скорость движения пешехода, ly км/ч. При отсутствии в постановлении о назначении �а � � экспертизы данSП + VПа ; SО = (t1 + t2 + ∆0,5t y 3) ��� из ��� ных о скорости пешехода ее можно принять табл. Д.1 и Д.2, учиа Vиa темп движения пешехода. тывая пол, возраст VН =����ПН �а . (4.4) При условии, что TП < T, эксперт может сделать вывод, что × б) � ��Н водитель не имел технической наезд, t2 + 0,5t3 + а предотвратить . (4.5) ТДН = t1 +возможности ���� l S уд xа V S ∆ y п П так как при данном времени движения пешехода до наезда водитель После этогопривести определяется расстояние, не успевал в действие тормозную которое систему. преодолел пешеход за в действие тормозной системы ТС, время ТДН: Здесь Т – времяVприведения a Рис. 4.1. Схема вышедшего наt проезжую часть справа в T = t1 + наезда t2 + 0,5t3;на t1 –пешехода, время реакции водителя, с; – время запазды× 2 = V Т . (4.6) S' П П ДН вания тормозного привода, с; t3 – время нарастания замедления, с. поперечном направлении, ТС, движущимся с постоянной скоростью: а– Vп SвП дальнейшем ∆yT < T, необходимость Если из расчета следует, что П передней частью; частью; × – место наезда исследовании отпадает.б – боковой48 Если по расчету TП > T, то дальнейшее экспертное исследование Рис. 4.1. Схема наезда на пешехода, вышедшего на проезжую часть справа в проводится в такой последовательности: поперечном направлении, ТС, движущимся с постоянной скоростью: �П наезда • определяется удаление в момент возникно-а – = от 3,6места , (4.1 ТПТС �Пформуле передней частью; б – боковой × – место наезда вения опасности для движения SУД почастью; = = SSУД УД �� ��� TПП,, T (4.2 (4.2) �П , км/ч; � (4.1) ТП = 3,6 ТС, где VA – заданная скорость движения �П �а �а 0,5t )О для+экстренного ; О = (t1 + t2 + путь 3S • определяютSостановочный торможе� (4.2) SУД = � TП, ��� ���а ��� ния ТС в заданных условиях по формуле (3.9): VН =����ПН �а �а .�а� SО = (t1 + t2 + 0,5t3) ��� + ; (4.4 ���а �а ��Н t1 + t2 + S0,5t . (4.5 ТДН =значений • проводят сравнение и3S+. УД �а . О ����а VН =����ПН (4.4) Если по расчетам SО < SУД, эксперт может сделать вывод, что во�а ��Н Последитель этого определяется расстояние, преодолел з t1 + t2 + 0,5t3избежать + которое . наезда (4.5) ТДН = имел техническую возможность путем тор- пешеход ����а можения с остановкой ТС до линии следования пешехода. время ТДН: После этого определяется расстояние, которое преодолел пешеход за время ТДН: S'П = VП ТДН. VП— ТДН. S'— П =53 48 48 (4.6 (4.6) Va × Рис. 4.1. Схема наезда на пешехода, вышедшего проезжую Vна SПчасть справа в ∆y п экспертное скоростью: исследование Еслинаправлении, из расчетов следует, что SО < SУД поперечном ТС, движущимся с ,постоянной а– продолжается для определения наличия у водителя технической частью; б – боковойвышедшего частью; × –наместо наездачасть справа в Рис. 4.1.передней Схема наезда на пешехода, проезжую возможности предотвратить наезд путем торможения, обеспечивапоперечном направлении, движущимся постоянной ющего выход пешехода заТС, пределы полосы сдвижения ТС.скоростью: а – �П Дляпередней этого сначала определяется которое переме-(4.1) 3,6 ,расстояние, частью; бТП– =боковой частью; × –наместо наезда �П стилось бы ТС за линию движения пешехода в процессе торможения: �� , . SSУД = = SО T−ПS (4.3)(4.2) ��� ПН �ПУД (4.1) ТП = 3,6 , ��П Затем рассчитывается скорость движения � � ТС при пересечении SО = (t1 + t2 + 0,5t3) а + а ; траектории движения пешехода: ����� ���а (4.2) SУД = TП, ��� (4.4)(4.4) VН =����ПН �а . �а �а� = (t1 + t2 + 0,5tвремя +движения ; SО определяется 3) �а �� Следующим шагом ТС с момента Н . а (4.5) ТДН = t1 + t2 + 0,5t3 +��� ��� ����а восприятия водителем опасности для движения до пересечения лиVН =����ПН �а . (4.4) нии движения пешехода: расстояние, После этого определяется которое преодолел пешеход за время ТДН: ТДН = t1 + t2 + 0,5t3 + �а ��Н ����а . (4.5) (4.5) =расстояние, VП ТДН. (4.6) за S'П расстояние, После этогоопределяется определяется которое преодолел После этого которое преодолелпешепешеход ход за время ТДН: время ТДН: SП′ =48 V Т . (4.6) (4.6) S'П = VПП ТДН ДН. Безопасное пересечение пешеходом полосы движения ТС при торможении возможно при соблюдении следующих условий: 48 SП′ > ∆Y + BA + ∆Б, (4.7) где ∆Y – расстояние от края проезжей части до ближней боковой поверхности ТС (рис. 3, а), м; BA – ширина ТС, м; ∆Б – безопасный боковой интервал между ТС и пешеходом, м, определяемый по формуле ∆Б = 0,005 La Va; (4.8) где La – длина ТС, м; Va – скорость ТС, м/с. Если условие (4.7) выполняется, экспертное исследование заканчивается с выводом о наличии у водителя ТС технической возможности предотвратить наезд на пешехода при своевременном применении торможения. При невыполнении условия (4.7) исследование продолжается с целью определить наличие у водителя ТС технической возможности избежать наезда на пешехода путем маневра. Данное исследование проводят для маневра типа «смена полосы движения». — 54 — Вначале определяется минимальное расстояние XФ, необходимое для перестроения вида «смена полосы движения»: XФ = КM � ��а� �М ��� , (4.9) (4.9) где КМ – коэффициент маневра, КМ =�аПм + bмVa; ам и bм – эмпириче(4.12) Sдоп = La , �а ские коэффициенты, зависящие от дорожного покрытия (табл. 4); � φy – коэффициент сцепления направлении, φy = 0,8φ ; х S1 = ав поперечном t1; (4.14) ��� YМ – поперечное смещение автомобиля, необходимое для безопас� ного объезда пешехода, S м:2р = а t2р; (4.15) ��� •при объезде сзади � S'УД = А TП − lх. (4.16) YМ =���BA + ∆Б − ly; (4.10) � • при объезде спереди Sдоп = (La − lх) П. (4.19) (4.11) �а YМ = ∆Б + ly − Sдоп, где ly – расстояние от правой боковой поверхности ТС до точки удара Sпн проходимый SудS – дополнительный �� � � (рис. 3, а) пешехода, м; путь, = КM � а М , (4.9) XФ доп ��� Sюнего: пешеходом за время проезда ТС мимо Sдоп = La I где VLaa – длина автомобиля, Ba �м. II S1 = а t1; III �П �а , Sю1 (4.12) (4.12) × IV (4.14) Таблица 4 ly L1 �а S2р = t2р; коэффициентов (4.15) Значение эмпирических S ам и bм Δ ��� ��� П y �А покрытия Вид и состояние дорожного S'УД = ��� T П − lх. Сухой асфальтобетон; φх = 0,7–0,8 VП ам bм 1,12 0,0050 1,05 0,0050 (4.16) � Рис. 4.2. Схема наезда на пешехода, S = (Lвышедшего − l ) П. на проезжую часть справа (4.19)в = 0,35–0,45 Мокрый асфальтобетон; φдоп a х х � а поперечном направлении, передней частью ТС в процессе 1,00торможения 0,0035(× – Обледенелое дорожное покрытие; φ = 0,1–0,2 х место наезда) Sпнпри соблюдении Sуд пешехода обеспечивается Безопасный объезд � �а � . ��а �М , Vн = ���X�Ф�= пнК� M условия Sю �� � (4.9) XФat<3 +SУД − S1� � −юS2р (4.13) � �,а �. Vа = 1,8J ��� Sю1 Sдоп = La П, (4.12) � �а реакции водителя, м; где S1 – расстояние, проходимое время �П ТС за ��а ���� Н×� B V a a SУД = III�а �� (4.21) I II IV � ���� (4.14) (4.14) S1П = а t1;, l а L1 ��� y � � ��ПН �� . (4.22) SУД = П �а � ���Ю � �П где S2р – расстояние, проходимое рулево- (4.15) SП Δy S2р =ТСа за t2р;время срабатывания ��� го управления, м; �а �� VП� а . SО = (t1 + t2 + 0,5t �А 3)��� ��� S'УД = TП − lх. а (4.16) ��� — 55 — Рис. 4.2. Схема наезда на пешехода, на проезжую частьскорость справа в ТС При определении SУД и Sвышедшего выражениях О в данных � Sдоп = (La − lх) П. (4.19) �а поперечном направлении, передней торможения (× – подставляется в размерности км/ч. частью ТС в процессе Sдоп = La П, S1 = �а ��� S2р = �а t1; ��� (4.12) �а (4.14) t2р;, (4.15)(4.15) где t1 – время реакции водителя (прил. Б), с; t2р – время срабаты� S'УД = А TП − lх. (4.16) ��� с для легковых автомобилей вания рулевого управления (0,2–0,4 и 0,8–1,2 с для грузовых автомобилей). � �П Sдоп = (La −��lах)�М . (4.19) = КM делается XФ(4.13) � �� �а , вывод о возможности (4.9) При выполнении условия � выполнения безопасного объезда пешехода. � = La П, нанесен боковой по- (4.12) Sдоппешеходу В случае если при наездеS удар �а Sпн уд верхностью ТС (рис. 3, б) в точке, �а расположенной на расстоянии lх Sю S1 = t1; (4.14) ���автомобиля от места наезда на пеот его передней части, удаление ю1 шехода в момент возникновения�аопасной обстановкиSопределяется S2р = t2р; (4.15) ��� по формулеVa Ba × I II III IV � S'УД = А TП − lх. l L(4.16) (4.16) ��� y 1 �П Это значение удаления от места наезда сравнивается с оста- (4.19) SП Δy SТС . доп = (La − lх) �а новочным путем SО, и делается вывод о наличии (или отсутствии) VП технической возможности у водителя предотвратить наезд путем Рис. 4.2. Схема наезда на пешехода, вышедшего на проезжую часть справа в экстренного торможения. определяют Sпнрасстояние, SСуд его помощью на поперечном которое переместилось бы ТС за линию движения пешехода направлении, передней частью SюТС в процессе торможения (× – в процессе торможения SПН, и далее ведут исследование возможместо наезда) Sю1 за пределы ности предотвращения наезда за счет выхода пешехода по фор= ���III� �пн � �а . торможении Vнсвоевременном Ba его × IполосыVaдвижения II ТС при IV мулам (4.3)–(4.8). L1 Vа = 1,8Jat3 + ���� � �ю �ly�а . ��а �М При исследовании возможности предотвращения наезда за счет = К , (4.9) X � Ф M SП Δy � �� �� ����Н �� объезда пешехода определяется автомобиля(4.21) SУДпоперечное = П �а �� а смещение �П ����а � VП YМ, необходимое для безопасного = La П, пешехода: (4.12) S объезда �П доп �а • при объезде сзади SУД = �а � ���Ю � ��ПН ��. (4.22) �П вышедшего на проезжую часть справа в Рис. 4.2. Схема наезда на пешехода, �а = B + ∆ ; (4.17) S1Y= t ; (4.14) 1 М Б ��� A �а �� поперечном передней ТС в процессе торможения (× – SО = (t1частью + t2 + 0,5t � а . 3) • принаправлении, объезде спереди ��� ���а �а S2р t2р+ ; S . место Y = = ∆наезда) (4.18)(4.15) доп При определении SУД Ми ��� SО Б в данных выражениях скорость ТС Дополнительный путь, проходимый пешеходом за время проез�А = ��� V S'нкм/ч. T� П�пн − l�х.�а . (4.16) УД = подставляется в размерности ��� да ТС мимо него, Vа = 1,8Jat3 + ��� ���Пю � �а . (4.19)(4.19) Sдоп = (La − lх) . �а � �П �� ���� � а Н 49 SУД = �а наличия � (4.21) Далее проводятся исследования �П ����а технической возможности у водителя предотвратить наезд на пешехода путем его объез� � ��� (4.22) SУД S=уд П �авыше ��ПН �� . Sпн Ю �4.13–4.15). да, аналогичные изложенным (4.9, �П Sю � �� SО = (t1—+ 56 t2 +— 0,5t3) а � а . ��� ���а Sю1 SУД Ba и SО вIIIданных ×выраженияхIV скорость ТС a I При Vопределении II 4.2.2. Исследование наезда при движении автомобиля с торможением Рассмотрим наезд на пешехода передней частью автомобиля в процессе торможения с доведением колес до юза (рис. 4). Полагаем, что из постановления следствия или определения суда известны следующие исходные данные: с момента возникновения опасной обстановки до наезда пешеход преодолел расстояние SП, двигаясь где Sю1 – расстояние от места наезда до конца следа юза задних колес автосо скоростью VП; автомобиль перед торможением двигался со скомобиля, м; L – расстояние от оси задних колес до передней части автомобиля, ростью Vа и1после наезда на пешехода в заторможенном состоянии м. �� преодолел расстояние Sпн; общая длина��тормозного следа Sю. (4.9) XФ = КM � а М , ��� Sуд I Va Sдоп = La �а S1 = II Δy ��� Ba S2р = S'УД = S Sю �а t1; �а ��� �А ��� �П Sпн , Sю1 × III t2р; = (L − l ) �П (4.14) IV L1 ly T П − lх. (4.12) (4.15) SП (4.16) VП . доп a х Рис. 4. Схема наезда на пешехода, вышедшего �а на проезжую часть справа в поперечном направлении, передней частью в процессе торможения Рис. 4.2. Схема наезда на пешехода, вышедшего ТС на проезжую часть справа в (× – место наезда) поперечном направлении, передней частью ТС в процессе торможения (× – (4.19) Sпн Sуд Время движения автомобиля из положения I до линии следоместо наезда) Sю вания пешехода равно времени TП движения пешехода на пути SП. При этом на отрезке пути I–IIнаезда автомобиль двигался равномерно, Sю1 Скорость автомобиля в момент определяется по формуле (3.19): а на отрезке пути II–III двигался с замедлением, уменьшая скорость �пн � �а . × Va a Vн = ��� � III Iот V до II наездаBV IV скорости . а Н Скорость движения автомобиля перед торможением l L1 y Определим расстояние, которое преодолело ТС от места наезда = 1,8Jat3 + ��� � �ю � �а . до места остановки SП Δy (рис.Vа4): Удаление автомобиля от места определяется по формуле S наезда =S + L, ПН � ю1 VП 1 (4.20) �� ���� �� а Н = П �а � (4.21) – расстояние от местаSУДнаезда до конца следа юза задних ко�П ����а где Sю1 Рис. 4.2. Схема наезда на пешехода, вышедшего на проезжую часть справа в лес автомобиля, м; L1 – расстояние от оси задних колес до передней или поперечном направлении, частью ТС в процессе торможения (× – части автомобиля, м. передней � SУД = П �а � ���Ю � ��ПН �� . (4.22) �П Скорость автомобиля в место момент наезда определяется по формуле наезда) (3.19):Остановочный путь Vн = ��� � �пн � ��аа . �а� SО = (t1 + t2 + 0,5t3) ��� � ���а t3 +57��� Vа = 1,8Ja— — � �ю � �а . SУД = �П �П �60 а� ��а ����Н �� ����а . (4.21) VПпроезжую часть справа в Рис.поперечном 4.2. Схема наезда на пешехода, вышедшего на передней частью ТС в процессе (×в– Рис. 4.2. Схеманаправлении, наезда на пешехода, вышедшего на проезжуюторможения часть справа поперечном направлении, передней частью ТС в процессе торможения (× – Рис. 4.2. Схеманаправлении, наезда на пешехода, вышедшего проезжуюторможения часть справа(×в – место наезда) поперечном передней частью ТСнав процессе месточастью наезда)ТС в процессе торможения (× – поперечном направлении, передней � �перед Vместо наезда) н = ��� пн � �а .торможением Скорость движения автомобиля = ���наезда) � �пн � �а . Vнместо = ��� �пн � �� а�.ю � �а . Vа V =н1,8J at3 +� ��� = 1,8J t + �� ��ю . Н�� V = � � . � �аопределяется V ��� н ��� а a 3места а���� пн Удаление автомобиля от наезда по формуле П + ���� �а��� Vа = 1,8J a t3 = ю � �а . SУД �а � (4.21) � ���� � П а � �� а ���� Н �. � � � � � Vа = 1,8J SУДa�t=3 +П��� � (4.21) ю а �� �� ���� � , (4.21) а Н �П Па �а � ���� (4.21) а � �П ��� � (4.22) SУД =SУДП �= �� ���� � аП� Ю а ПН � . � �� ���� � � а Н или �SПУД П = � � (4.21) � а (4.22) SУД = ��Па ����� ��аПН � . � � Ю � ���� П ��� � �� � �. SУД �=П �а � � (4.22)(4.22) S�ОП�=П (t1 + t2 + Ю 0,5t3) аПН �� а . ��� � � .���а �а � ���Ю � ��� (4.22) а ПН� а � УД = ОстановочныйSпуть SО =�(t �� �.а П 1 + t2 + 0,5t3) а ��� ���авыражениях SО =и(t1 S+Оt2 +в 0,5t � . 3) При определении SУД данных скорость ТС � а �а��� �а��� (t + t + 0,5t ) = + � . S (tS11 + tв22 данных 0,5t33 ) При определении SУД О икм/ч. выражениях скорость ТС подставляется в размерности ��� ��� а При определении SУД и ОSО в данных выражениях скорость ТС подставляется в размерности км/ч. При определении S и S в данных выражениях скорость ТС ТС При определении S и S в данных выражениях скорость УД км/ч. УД О О подставляется в размерности подставляется в размерности км/ч. подставляется в размерности км/ч. 49 Далее проводим сравнение между собой значений SУД и SО 49 49 возможности остановки автои проверяем на соответствие условию мобиля до линии следования пешехода 49 SО < Syд. (4.23) Если по расчетам следует, что SО < SУД, то делается вывод о наличии у водителя технической возможности предотвратить наезд путем экстренного торможения и исследование на этом заканчивается. Если из расчетов следует, что SО > SУД, обычно делается вывод об отсутствии у водителя технической возможности предотвратить наезд. Вместе с тем при проведении экспертизы может быть проведена проверка наличия у водителя возможности пропустить пешехода и тем самым избежать наезда. Расчет проводится в аналогичной уже изложенной выше последовательности. Перемещение автомобиля после пересечения линии следования пешехода при своевременном торможении S′ПН = SО − SУД. Скорость автомобиля в момент пересечения им линии следования пешехода � . VН = �����а ��пн � Vпредшествующая Н = �����а ��пн . Скорость автомобиля, Vа = 1,8 Ja t3 + �����Ю ��аторможению, . Vа = 1,8 Ja t3 + ����� �� . � ���� �Ю а (4.24) Т'д.н = Т + а Н�. аН ����� а ���� Т+ . (4.24) Т'д.н—=58 � —���� S'П = П Т'д.н. а (4.25) ��� � S'П = П Т'�д.н���� . (4.25) ��� Т = Т + а Н. (4.27) � . VН = �����а ��пн � . VН = �����а ��пн Vа = 1,8 Ja t3 + �����Ю ��а . Время движения автомобиля до линии следования пешехода �� . Vа = 1,8 Ja t3 + ����� � ���� �Ю а (4.24) (4.24) Т'д.н = Т + а Н� . �а���� ����аН Т'д.н = Т + . (4.24) ���� � Путь пешехода за время Т′ д.н П Т' . а S'П = (4.25) д.н ��� � (4.25) (4.25) S'П = П Т'д.н. ��� �а ����Н Тд.н = Т +полосы . (4.27) Условие безопасного перехода ������ ����а движения автомобиля: Тд.н = Т + а Н. (4.27) ����� S′ПТ> ∆=y �+П B + ∆∆а�.����. (4.26) (4.28) А = Б 3,6 П � ∆�� ��� П П � �П Соблюдение данного условия указывает = . на то, что у водителя (4.28) ТП = 3,6 �П�а �П Тзап. наезда Sзап =избежать была техническая возможность на пешехода, но он (4.31) ��� �а = Т . (4.31) S зап несвоевременно. зап воспользовался торможением �уд ����а��� ∆� ���∆Б <с началом Если бы водитель неVзапоздал торможения, то пеше- (4.33) ��П .Б ���� а а уд� � ���∆ ����� Н�= а∆�� пн < ход успел бы уйти из опасной тому моменту, когда автомо- (4.33) �а зоны к � �П или V Н = �����а ��пн . Vа = 1,8 Ja t3 + состоянии, �����Ю ��а . приблизился к линии или биль, двигаясь в заторможенном ��уд ����а � . Ю� ��а . (4.34) следования пешехода. t3 +∆ ����� Vа = 1,8VJаa > �а ���� ��∆ Ба � Н . Туд��+���� (4.24) Т'Vд.н >= �� . (4.34) ���� Для определения, не запоздал ли водитель с торможением, раса а� ∆�� ��∆ �а ���� Б Н ТП + . (4.24) д.н = � чет проводят следующимТ'образом. ����а S'П = Т'д.н. (4.25) ��� L1 Sю Время движения автомобиля �П до наезда S'П = Т'д.н . (4.25) � ���� L1 Sю Тд.н =��� Т + а Н. (4.27) (4.27) ����� �а ����На Тд.н = �Тдо+ наезда (4.27) Sю1 La Время движения пешехода ∆�.���� =а . (4.28) ТП = П 3,6����� � � Sю1 La П ∆� ��� �ПП � (4.28) ТП = �3,6 = . (4.28) �П а Т . �П (4.31) S зап = зап B ��� I a Условие своевременного III предпринятого водителем: IV II �а торможения, = а Т∆зап . Б (4.31) S�зап I Ba III IV× уд ������� � ���∆ II < ×. (4.33) (4.29) �аТд.н ≥ ТП �П ×Б × �уд ����а ∆� ���∆ S S пн <означает, что водитель (4.33) Выполнение этогоудусловия начал реаги�а �П или S S уд пн ∆y = Sвозникновения VП ровать на пешехода либо в момент опасной обстаП ��уд ����а � или > . (4.34) V ∆ = S V а новки (Тa.н = Тп), либо раньше (T П п). П ��∆> T ∆ ya.н ��уд������аБ� С помощью приведенных (4.34) Vа > выше .уравнений можно также опре∆�� ��∆Б Рис. 4.3. Схема наезда на пешехода, вышедшего на проезжую часть делить, мог ли водитель, применив своевременное экстренное тор4.3. Схема наезда на пешехода, вышедшего на проезжую часть справаможение, в Рис. поперечном направлении, боковой частью ТС LДля Sпешехода. ю в процессе 1торможения; остановиться до линии следования этосправагов поперечном направлении, боковой частью ТС в процессе определяется времени, просроченный водителем L1 торможения; SюТС × промежуток – место удара боковой частью вследствие опоздания: × – место удара боковой частью Sю1ТС La Т = ТП − Тд.н. (4.30) Sю1 был нанесен боковой LaПри наезде на пешехода, запв котором удар автомобилявза котором этот промежуток времени (из поПри Перемещение наезде на пешехода, удар был нанесен боковой поверхностью автомобиля (рис. 4.3), экспертное исследование приводится в той a I Bложения III IV II I в положение II) составляет поверхностью автомобиля (рис. 4.3), экспертное исследование приводится в той × I Ba III IV × II — 59 50 — ×50 × Sуд Sпн Sуд ∆y = S П VП Sпн а � Н. = Т +а �� (4.27) = ����� VНТд.н пн а. ����� Vа = 1,8 Ja t3 + �����Ю ��а . ∆� ���� � ����� Vа = 1,8 a t3 П+3,6 ТПJ= = Ю���а.. (4.28) �а �����НП �П (4.24) Т'д.н = Т +� ���� � . ����На �а+ а = Т . (4.24) Т' д.н Sзап = � Тзап .а ���� (4.31) (4.31) П S'П =���� Т'д.н. (4.25) ���до Условие остановки автомобиля линии ∆д.н � ���∆ S'�уд = аП<Т' . Б следования пешехода: (4.25) П ���� (4.33) ��� �а ����Н �а = П >ТSПН (4.32) (4.27) ТSд.н +� .����� . зап ����� Т = Т + а На. (4.27) или �����а∆ ��� Далее определяется, мог д.н ли автомобиль проехать мимо пешехо�П � � 3,6а �=∆ ��� . а продолжал бы дви- (4.28) ТП =���не ���� да, не задев его, если бы водитель � �П� П�уд П тормозил, (4.34) => автомобиль 3,6 = . проехать . ТVПали Далее определяется, мог мимо пешехода, не (4.28) ��∆ ∆ � �П �� Б П � жение с той же скоростью. а Тзап. зап =� задев его, если бы водитель неSтормозил, бы движение с той же (4.31) ��� а продолжал Условие безопасного проезда скоростью мимо пе- (4.31) Sзап = са постоянной Тзап. ��� ∆ ���∆ скоростью. � ���� шехода: уд а � Б <∆ ���∆ (4.33) L1 Sю �уд ���� �аса постоянной Условие безопасного проезда � �П Б скоростью мимо пешехода: < (4.33) (4.33) ��ауд ����а ∆�����∆ П Б или < (4.33) �а �П или или La S ю1 �� ���� � уд а или Vа >�� ���� � . (4.34) (4.34) ∆�� ��∆ уд аБ �� ���� (4.34) Vа V>а > уд а�.. ∆��∆��∆ В судебной экспертизе этот вариант рассматривается редко,(4.34) так Б �� ��∆Б Ba ПДД для предотвращения Iкак III регламентируют снижение II В судебной экспертизе этот ДТП вариант рассматривается редко, такIV как скоПДД L×1 слуS ю рости движения вплоть до остановки ТС. Однако в некоторых × для предотвращения ДТП регламентировано снижение скорости движения L1 Sю чаях маневр невозможен, а своевременное экстренное вплоть до остановки ТС. в некоторых случаях маневр невозможен, а Sуд Однако Sпн торможение автомобиля приводит к неизбежному наезду на пешехода. В этом экстренное торможение автомобиля приводит к неизбежному Sю1 Laсвоевременное ∆ V y = SП П случае обеспечить безопасное движение пешехода лишь при Sю1 можно L a наезду на пешехода. В этом случае обеспечить безопасное движение пешехода условии проезда ТС мимо него без снижения скорости. можно лишь при условии проезда ТС мимо него без снижения скорости. последовательность иIII методику экспертного I BaРассмотрим IVисслеРис.Рассмотрим 4.3. Схема наезда на пешехода, вышедшего на проезжую часть II последовательность и методику экспертного исследования Ba Iдования III IV наезда боковой частью ТС на пешехода при тех же условиII × × справа внаезда поперечном направлении, боковой частью ТС в процессе торможения; боковой частью ТС на пешехода при тех же условиях, что и выше. ях, что и выше. × × Sуд удара боковой частью ТСSпн × – место Sуд Sпн L1 ∆y = SП VП Sю ∆y = SП VП При наезде на пешехода, в котором удар был нанесен боковой La Sю1 Рис. 4.3. Схема наезда на пешехода, вышедшего на проезжую часть поверхностью автомобиля (рис. 4.3), экспертное исследование приводится в той Рис. 4.3. Схема наезда на пешехода, вышедшего на проезжую часть справа в поперечном направлении,В боковойIIIчастью ТС в процессе торможения; I Ba IV II а 50частью ТС в процессе справа в поперечном направлении, боковой торможения; × частью ТС × × – место удара боковой × – местоSудудара боковой частью SТС пн ∆y = S П VП При наезде на пешехода, в котором удар был нанесен боковой При наезде на пешехода, в котором удар был нанесен боковой поверхностью автомобиля 4.3), экспертное исследование приводится в той Рис. 5. Схема на(рис. пешехода, вышедшего на проезжую часть справа Рис.наезда 4.3. Схема наезда на пешехода, вышедшего на проезжую часть поверхностью автомобиля (рис. 4.3), экспертное исследование приводится в той в поперечном направлении, боковой частью ТС в процессе торможения; справа в поперечном направлении, боковой частью ТС в процессе торможения; 50 частью ТС × – место удара боковой × – место удара боковой 50 частью ТС — 60 — 63 При наезде на пешехода, в результате которого удар был нанесен боковой поверхностью автомобиля (рис. 5), экспертное исследование проводится в той же последовательности, что и при фронтальном ударе, но имеются и некоторые различия. В частности, при определении перемещения автомобиля в заторможенном состоянии после пересечения линии следования пешехода учитывается расстояние lх от передней части автомобиля до точки удара на боковой поверхности: SПН = Sю + L1 − lх. (4.35) Время движения пешехода от края проезжей части до места наезда ТП = ∆� �П 3,6. (4.36) (4.36) � ��а ����Н ��расстояния l от передней Удаление ТС от места с учетом х SУД наезда = П �а � − lх, (4.37) П а ∆� на ��� части автомобиля до точки �удара боковой поверхности опреде∆ Т = 3,6. (4.36) � П � (4.36) ТП�П= ∆3,6. � лится по формуле � �П �� (4.38)(4.36) SУД = П �а � ��� ПН � − lх. = 3,6. ТЮП � �П �П Н �� � �П ��а ���� (4.37) SУД = ��аП� � ��а����� −� lх, (4.37) Н SУД�П= ��Па а����а��а�а ���� −� lх, (4.37) �П3) ���.а Н � S = (t + t + 0,5t � О 1 2 S = � � − l , (4.37) или ��� ��� УД х а а � �П � ��ПН��� �� а−�lх. (4.38) SУД = П ��аП� ���Ю (4.38) SУД�П= ��Паа)� ���Ю � ��ПН � − lх. (4.38) (4.38) SУД �=П �а � ���Ю �� ��ПН �� − lх. � �а �а П Остановочный �а SО =Sпуть (t � .�аS� П B 1 + t2 + 0,5t3) ���3) ��� SО = (t1 + t2 + 0,5t .� а �� а ���� SО = (t1 + t2 + 0,5t��� � аа . 3) ��� ���а а) а) Va S •а) Vзначения × Далее сравниваются между собой возП SП Sуд и SО. Условие B S S B П можности остановки автомобиля пешехода: Sуд до линии следования SП SB SО < Syд. (4.39) Va • VП × Va SО < SУД • VП вывод, что водитель × б), то делается Если по расчетам расVa • VП × S S уд ю полагал технической возможностью Sуд предотвратить наезд путем эксSуд на этом заканчивается. Если тренного торможения и исследование б) же SО > SУД, обычно делается вывод б) об отсутствии у водителя техниVП Va • Sюб) наезд. × ческой возможности предотвратить Sю Sю SB V a SB • VSПП VП Va • Va • Sуд VП SB SB SП SП S4.4. П SРис. уд Sуд— 61 — Sуд �П × × Sпн × Sпн Sпн Sпн 4.3. Исследование наезда на пешехода при попутном и встречном движении транспортного средства и пешехода При проведении экспертного исследования данного вида наезда важно правильно определить момент обнаружения водителем пешехода на проезжей части. В данном случае для решения вопроса о наличии технической возможности предотвратить наезд кроме данных о направлении и скорости движения пешехода необходимы еще сведения о видимости дороги в направлении движения и конкретной видимости пешехода. 4.3.1. Исследование наезда ТС на пешехода при попутном движении Начальная стадия исследования состоит в определении остановочного пути ТС в данных дорожных условиях, степени удаленности ТС от места наезда на пешехода и в сравнении их значений, на основании чего делается вывод о возможности предотвращения наезда путем торможения. Если при движении пешехода в попутном направлении остановочный путь автомобиля SО меньше расстояния конкретной видимости SВ, то можно сразу сделать вывод, что у водителя была техническая возможность предотвратить наезд на пешехода путем торможения. Если окажется, что SО > SB, исследования наличия технической возможности предотвратить наезд на пешехода следует продолжить. При движении ТС со скоростью Vа с момента обнаружения пешехода последний пройдет путь SП со скоростью VП до наезда на него автомобиля (рис. 6). Удаление автомобиля от места наезда в момент, когда водитель имел возможность обнаружить пешехода, составит Sуд = SВ + SП, (4.40) где SВ – расстояние конкретной видимости пешехода, м; SП – удаление пешехода от места наезда в момент его обнаружения водителем, м. — 62 — � ∆� �� ����Н �� ТП П=�а �3,6.а SУД = � � �П П ���а − lх, � ��а ����Н � П � � � �= ��П∆� ��� SУД =SУД Ю � ��ПН−� lх,− lх. � ТПа = а 3,6. � П а) �П� П � ���а (4.36) (4.37) (4.38) (4.37) (4.36) �� а �� а � ��∆а ���� Н (4.38) SSУД (t�П1=� +�аПt� 0,5t � �� О 2 +��� Ю3�)� SBS==УД SППН � −���l�ха,. − lх. (4.37) ��� аП П � �Т = 3,6. (4.36) ��� П �П а � � � а а а) ) ����������. SО==�П(t� + �0,5t 1 +�t2��� 3 ��аПН �Н − lх. � (4.38) SУД ��� ���а − lх, × Va �П аSУД = •ПЮ�а V� (4.37) П �П ���а SП SB Sа) �� уд �а � SО = S(tУД ) �� а�� . �� − lх . 1 +=t2 П+�0,5t � 3��� (4.38) ��� ��� а Ю а ПН SB �П SП Va •� VП� � × а) б) SО = (t1 + t2 + 0,5t3) а � а . Sю Sуд��� ��� SB SПа Va • VП × а) Va • SBVП × б)Sуд SП Va • SVП × ю уд SB SSб) Sпн П Va × Sю• VП × Va • Sуд VП б) Sуд Sю Рис. 6. Схема наезда при попутном • на пешехода VПпри попутном × движении: VaнаТС Рис. 4.4. Схема наезда ТС пешехода движении: а – движение SПскоростью; SпнТС а – движениеSТС б – движение B с постоянной б) ТС с постоянной скоростью; б – движение ТС с торможением; × – место наезда с торможением; × – место наезда Sю VП Sуд × Va • S S B П пн В случае наезда на пешехода ТС, движущегося с Sпостоянной В случае наезда на пешехода движущимся с постоянной скоростью ТС скоростью, удаление пешехода Sот уд места наезда в момент его обна• × водителем (рис. Va наезда удаление пешехода вV момент его обнаружения П Рис. 4.4. Sпн их движеSB от места ружения водителем (рис. 6, а)SПс учетом данных о скорости 4.4, а) с учетом данных о скорости их движения может быть определено из ния может быть определено из Sудсоотношения Рис. 4.4. соотношения: S Sпн SB � SП П=�ПSуд П. (4.41) (4.41) SП = Sуд . �а (4.41) Sуд �а Рис. 4.4. �П �а и (4.41) получим удаление Тогда S(4.40) (4.42) Тогдапри присовместном совместном решении решении и. (4.41) получим удаление SПSуд == Sуд(4.40) (4.41) В . �а�а ��П автомобиля от места наезда автомобиля от места наезда �аа � � ���� � Рис. 4.4. Sуд = (4.42) (4.42)(4.41) SSудуд =�SПВT �. а Н , (4.43) � SПSуд= = SВ .аa�а��� .��П ����а (4.42) � �аа��П � ���� � 6, б) удаление авто�� При процессе торможения п �а ТС�а(рис. а 3,6. Принаезде наезде вв процессе торможения (рис. 4.4, Нб), удаление автомобиля (4.42) (4.44) ТSа=В=TТС � (4.43) � a Sуд S=Sуд . П ��� пиз Sа�уд . ����а (4.41) �� мобиля от места наезда определится П =� П равенства �а от места наезда определится из равенства � � ���� � Из подстановки (4.42) в (4.43) следует: �па 3,6.�� = (4.44) Т а � (4.43) SудSуд=S=удTTa=a�пSа В� � �а�аа����.Н�,Н , (4.43) (4.43) (4.42) ��� ���� �а а ���� �а��� ��а�а �� П Н S = S � . (4.45) уд П (4.43) � следует: гдеИзVНподстановки – скорость (4.42) наездав на пешехода, км/ч; T – время движения ��� П �а а �а� ����На� (4.44) Та =S п �3,6. 66 � из отношения: , (4.43) уд п = Ta � автомобиля до места наезда, с, �определяемое � � ��� ��Н� ���� а Sуд = SП а � а 51 . (4.45) �П � ���а Из подстановки (4.42) в (4.43) следует: (4.44) Та = п 3,6. (4.44) п � �а �а���� Н51 Sуд = SП � . (4.45) �П ���а Из подстановки (4.42) в (4.43) следует: — 63 —� � � � �� Sуд = SП а �51а Н . (4.45) �П ���а Sуд = Ta Та = �п �п � ��� 3,6. ����а , (4.43) (4.44) Изподстановки подстановки(4.42) (4.42)вв(4.43) (4.43)следует: следует: Из Sуд = SП �а �П � �а� ��Н� ���а . (4.45) (4.45) В свою очередь подстановка в (4.44) равенства Sп = Sуд − SВ и последующее преобразование позволяет51получить окончательное выражение для определения удаления ТС от места наезда в момент возникновения опасности для движения: Sуд = ��� Sа = Sа = �а ��� � ��а ���Н �� ��П ���а ���� � ��� �а ��П (4.46) (4.46) . Порядок определения Vа,�аVН, J��аарассмотрен выше. � � �� = (t +�t2 + � 0,5t3)���На ����П �а ��� . . SОSуд =1�� ��� ��� ��� ���а ���� �аа ��П Остановочный путь �� ��� � (4.46) � ∙ T, а пешеходSпройдет путь SП3)= �аП �∙ T.�аНа . следующей стадии О = (t1 + t2 + 0,5t �а �а � � ��� ��� ���а � �� ПП Т + П St. и S . t − между ; SПсобой = SВ +значения Sa = пройдет а сравниваются пешеход УД О ��� � путь SП = ��� ���∙ T. На ��� следующей ��Далее ∙ T, стадии При неравенстве SО < SУД делается вывод о наличии у водителя ���а ���П �� � � � � �� � ��П� � ���П� = 0. t2 −возможности технической предотвратить ;В SП = аSВ + П Тнаезд + t.путем экстренного Sa = а t +−2 а�� ��� �а ��� ��� ��� ��� � ����� торможения, и экспертное исследование на этом заканчивается. � ���а �� � �� � � ��П �� + 2 ����� �� t2 −Tсравнении ��� Если при полученных имеем П � ��� = �� � В � а���данных ��= 0.,SО > SУД, обыч(4.47) �������� а ��� а �������а В��� ����� �а но дается вывод об отсутствии у водителя технической возможности � �� �� �� � предотвратитьTнаезд. = � �� � � � ��В � �� , (4.47) �������а �������а ��� �а При установлении возможности предотвращения наезда в слуа) SB чаях попутного движения ТС и пешехода есть свои особенности. В частности, при движении пешехода в попутном направлении для а) SB снизить скорость ТС до значепредотвращения наезда достаточно × VП • Va ния скорости пешехода, чтобы избежать наезда на него. Из экспертной практики следует, что сравнение остановочного × V • Va пути автомобиля SОSсудего удалением от места наездаSППSуд для определения технической возможности предотвращения наезда не всегда б) приводит к правильным продолSП Sуд выводам,Sюпоэтому рекомендуется жить исследования. б) SП � �� ��� ��� �� ��� В момент возникновения опасной дороге расстоS ����ю�ааобстановки ���аа���НН� ��ПП�на � ��� (4.46) � .. (4.46) SSудуд==�� ��� ���аа���� ���� ��аа�� �� ��� ��� П П яние между ТС и попутно движущимся пешеходом составляет SB. SП ��ана ��а�а� а При своевременном реагировании опасVa 0,5t �возникшую П 33))• � 0,5t .. SSОО==(t(t11++×tt2водителя 2++V ��� ��� ���аа ��� ность за время Т = t1 + t2 + 0,5t3 автомобиль переместится на рассто��� ��П � T,ааапешеход пешеходпройдет пройдет путь =• П ∙∙∙T. T. На следующей стадии яние SSSааа=== ��� T, пешеход пройдет = T.На Наследующей следующейстадии × путь VПSSППП= V∙∙∙T, ��� ��� a S ��� Sпн уд стадии автомобиль начнет двигаться с замедлением Ja,��иП для любого ��аа ��а���� ��ПП П tt−− а � ;;SSПП==SSВВ++ ��� ТТ++ ��� t.t. SSaaS==B ��� ��� — 64� — ��� ��� Sпн Sуд ���аа�� �� �� �� �� 22 ��� ПП�� ��аа� ��ВВ� ��� ���ПП�� �� �� ==0. 0. tt −− S� B��� ++22�� ��� �аа��� ��� ���� Рис. 4.5. Схема наезда ТС на пешехода при встречном движении: а – движение Sуд = ��� �а ��� � � ��а ���Н �� ��П ���а ���� � ��� �а ��П �� ���� �� �� � � ��� . (4.46) а 0,5tа3) �Н�а���П ���� . . SОSуд= =(t1��+��t2 а+ � (4.46) ��� а��� ��а ��� Н��� П ��� а ���� аа��П � � �торможения, . (4.46) уд = ��� момента времени t, Sотсчитываемого от начала коорди��� ���а ���� �а �� � П �� � Sнаты ∙ T, а пешеходSавтомобиля пройдет путь иSПпешехода = �а П ∙ T.�а На следующей стадии а = перемещений О = (t1 + t2 +S0,5t 3)� ����� � S.П следующие: ��� а SО = (t1 + t2�+ 0,5t3) а���� а���. а ��� � ���а � �а �� �� Sa = пройдет t − а путь ; SП =SSПВ=�+�ПП∙ ТT.+НаП следующей t. Sа =� ∙ T, а пешеход стадии ��� � ��� ��� Sа = ����∙ T, а пешеход пройдет путь SП = П���∙ T. На следующей стадии ��� � S = S ��� �� �� наезда � �П � преобразований Поскольку в ��� момент , в �результате П а �� П t2 − Sa =а �Па t − + 2�а����;ВS� = S +��� ��t.= 0. а В�+�П � Т П ��� � ��� �� � а� уравнение получаем квадратное t − а �; SП = SВ + П���Т + П���t. Sa = а��� ��� � ��� ��� ���а �� � �� � � ��П �� + 2 �� �� �� � t2 −��� � � � = �0., В а П T =�� � � � ���В������� ��� (4.47) П �� � �� а ��� � ������� ��� �� � t2 − а �������� + 2 �� � � � �� = 0.�а а аа В П ��� ��� � � а � Решение этого квадратного уравнения имеет вид � �� �� �� � T = �� � ���� �� � � ��В ��� ��� , (4.47) �������а �������а ��� �а T= � �� � � � ��В � �� , (4.47) (4.47) а) �������а �������а ��� �а SB где DV = Va − VП, скорость в размерности км/ч. а) При отрицательном подкоренном а)SB выражении уравнение (4.47) имеет два комплексных корня, значит, × может VП остановить• Va SB автомобиль ся, не догнав пешехода, что позволило бы водителю избежать наезда. При нулевом × VП имеет • один Va подкоренном выражении уравнение S S уд П × V • V a П корень, что указывает на равенство скоростей автомобиля и пешеб) хода в момент контакта, а следовательно, возможность удара с миSП Sуд S ю нимальной силой. S SП уд б) выражении При положительном подкоренном уравнение имеет SП б) S ю два действительных корня, из которых практический смысл имеет Sю меньший по значению. Из этого следует, SП что даже экстренное тор× VПкоторый • V a S П можение не сможет предотвратить наезда, произойдет через время (T + t) после возникновения опасной обстановки. × VП • Va Sпн Sуд × VП • Va 4.3.2. Исследование наезда ТС на пешехода SB при встречном движении Sпн Sуд Экспертное исследование наезда на пешехода, перемещающеSпн Sуд SB гося во встречном отличается от анализа наезда при Рис. 4.5. Схема наезда ТСнаправлении, на пешехода при встречном движении: а – движение SB попутном движении незначительно. Удаление ТС от места наезда ТС с постоянной скоростью; б – движение ТС с торможением; × – место наезда (рис. 7) определяется расстояний: Рис. 4.5. Схема наезда ТС наразницей пешехода при встречном движении: а – движение Рис. 4.5. Схема наезда ТС на пешехода при движении: а – движение S = SB встречном −ТС SП,с торможением; (4.48)наезда УД ТС с постоянной скоростью; б – движение × – место При ТС с постоянной скоростью (рис. 4.5, а) ×путь, пройденный ТС с постоянной скоростью; б – движение ТС с торможением; наезда где Sдвижении – расстояние конкретной видимости пешехода, м;– Sместо – удаВ П пешеходом наезда, определяется из соотношения лениедо пешехода от места наезда в момент его обнаружения водиПри движении ТС с постоянной скоростью (рис. 4.5, а) путь, пройденный телем, м. При движении ТС с постоянной скоростью (рис. 4.5, а) путь, пройденный 52 пешеходом до наезда, определяется из соотношения пешеходом до наезда, определяется из соотношения — 65 — 52 52 SУД = SB − SП, (4.48) где SВ – расстояние конкретной видимости пешехода, м; SП – удаление пешехода от места наезда в момент его обнаружения водителем, м. а) SB × Va VП Sуд • SП б) Sю SП × Va VП • Sуд Sпн SB Рис. 7. Схема наезда ТС на пешехода при встречном движении: а – движение ТС с постоянной скоростью; б – движение ТС ТС с постоянной скоростью; б – движение ТС с торможением; × – место наезда с торможением; × – место наезда Рис. 4.5. Схема наезда ТС на пешехода при встречном движении: а – движение При движении ТС с постоянной скоростью (рис. 7, а) путь, пройденный пешеходом до наезда, определяется из соотношения 69 скоростей пешехода и автомобиля: � (4.49) SП = Sуд �ПП.�П (4.49) (4.49) (4.49) SПSП= =SудS�уда . . �а �а Совместное решение уравнений (4.46) и (4.47) приводит к виду Совместное решение уравнений и (4.47) приводит к виду �П(4.46) Совместное решение уравнений (4.46) и (4.47) приводит виду Совместное решение уравнений приводит к квиду . и�(4.47) (4.49) SП = S(4.46) уд (4.50) (4.50) Sуд = SВ −�аSуд �ПП,�П � (4.50) В− SудSуд= =SВS− SудSуда �а (4.50) �а Совместное решение уравнений (4.46) и (4.47) приводит к виду или �а Sуд = SВ �а �а.�П (4.51) S == = (4.51) (4.51) (4.50) а �S�П . . В (4.51) SSВВS�− SSуд уд уд уд �П� �а ��а � �Па �а ��а � �П �� �П� ��� � �� � �П� � � П��П ��� Sуд = ��в ТС – . Исходя из этого удаление от места в���данном а а �а ���аа�� ���� П �наезда ��� а. S�� SВ– – �� SудSуд= =�� ��а���а��П �.П. уд в в= ��� �� � ��� а � � � ��� �� � ��� � � � (рис. 7, а) определяется выражениема Па а П � Va VaVa Va �� � � �� � ��� варианте (4.52) (4.52) (4.51) (4.52) Sуд = ��в а – Sуда П П � . аx (4.52) (4.52) ��� Sуд�а ��� �а � �П Sуд�� аxаx Если полученные в расчетах значения описываются неравенством аx SО < Syд, делается вывод о наличии Sуудводителя ТС технической возE торможения. Од× можности предотвратить наезд на пешехода путем •A EE ×× •A •A нако это исследование предполагает, что пешеход тоже должен реагиay на возникшую опасность для движения и остановиться. lЕсли y ровать ly ayay Dly × B E Δy •A DD BB ΔyΔy — 66 — SП S ay C l y SП П C C B Δx Δy VП D Δ Δx V VП же пешеход, набежав на остановившееся ТС, получит серьезные травмы, то такую ситуацию следует квалифицировать не как ДТП, для которого характерно движение автомобиля, а как несчастный случай, такой же, как удар человека о неподвижное препятствие. 4.4. Исследование наезда на пешехода при ограниченной видимости и обзорности, ограниченной неподвижным препятствием 4.4.1. Исследование наезда при движении автомобиля без торможения Рассмотрим последовательность экспертного анализа ДТП, в котором наезд на пешехода произошел фронтальной частью движущегося с постоянной скоростью ТС в условиях ограничения обзорности с места водителя неподвижным препятствием. Наиболее часто таким препятствием являются стоящие у края проезжей части или на остановке общественного транспорта транспортные средства (рис. 8). аx Va Sуд E •A ay B × Δy Δx C VП ly D SП П Рис. 8. Схема наезда на пешехода, вышедшего на проезжую часть справа вРис. поперечном из-за неподвижного передней 4.6. Схеманаправлении наезда на пешехода, вышедшего напрепятствия, проезжую часть справа в частью ТС, движущегося с постоянной скоростью (× – место наезда) поперечном направлении из-за неподвижного препятствия, передней частью Поскольку наезд на спешехода быть неизбежен и при неоТС, движущегося постоянноймог скоростью (× – место наезда) граниченной обзорности, на первых стадиях исследования целесообразно не учитывать водителю обнаПоскольку наезд наналичие пешеходаобъекта, мог быть мешавшего неизбежен и при неограниченной ружить пешехода. обзорности, на первых стадиях исследования целесообразно не учитывать наличие объекта, мешавшего водителю обнаружить пешехода. — 67 — При этом возможны два исходных варианта: • водитель не имел технической возможности остановить транспортное При этом возможны два исходных варианта: 1) водитель не имел технической возможности остановить транспортное средство до линии следования пешехода при отсутствии препятствия; 2) водитель имел такую возможность уже после того, как пешеход оказался в зоне неограниченной обзорности, и препятствие не ограничивало возможность водителю видеть пешехода. Если в процессе этого исследования не удалось получить положительный результат, дальнейшие исследования проводят графическими или аналитическими методами. Графическим методом исследования проводят с учетом данных о положении неподвижного препятствия на проезжей части, из-за которого вышел пешеход, и их взаимном положении. Если в качестве неподвижного препятствия, из-за которого вышел пешеход, рассматривается транспортное средство, стоящее у края проезжей части, для экспертного исследования необходимы следующие данные: • тип и модель транспортного средства; • координаты места водителя в транспортном средстве: ах – удаление места водителя от передней части автомобиля; ау – удаление места водителя от боковой части транспортного средства (ближайшей к пешеходу); • расположение ТС по отношению к ближнему краю проезжей части; • расстояние между неподвижным ТС и полосой движения автомобиля, а также расстояние до линии движения пешехода. Для определения расстояния, на котором находился автомобиль от места наезда в момент, когда стоящее ТС уже не ограничивало обзорность пешехода с места водителя, необходимо предварительно рассчитать удаление автомобиля от места наезда в момент начала движения пешехода по проезжей части. Далее масштабным построением следует нанести размеры проезжей части с указанием ее границ, положения места наезда, неподвижного препятствия, а также полосы движения автомобиля и траектории движения пешехода. Положение автомобиля I (рис. 8) в момент начала движения пешехода от края проезжей части определяется из расчета его удаления от места наезда: — 68 — � S'уд = S'П а , (4.53) �П (4.53) где Sп′ – полный путь пешехода до места�а наезда, м; Vа – скорость �а� S = (t + t + 0,5t ) + . О t 2 3 автомобиля, км/ч; VП – скорость пешехода, ��� км/ч. ���а На схему (рис. 8) наносят положение автомобиля I, соответству�а (4.54) Sуд = SП � П ющее положению пешехода в момент начала его движения (точка ��Далее �� через точку рабочего места водителя (точка А) и точку П П). = . Подставляя в выражение указанные на рис. 4.6 обозначения, �� �� проводят прямую и устанавливают, ограничивало ли стоящее трансполучаем уравнение портное средство видимость пешехода. Если такое ограничение �уд ��� �∆� S с∆остановочным отсутствовало, то проводят сравнение путем SО = уд � , (4.55) ��� �П �∆у� �� � и делают вывод о наличии или∆�отсутствии водителя технической �уд � возможности избежать наезда путем �аторможения. 3,6 = П 3,6 путь, пройденный до наезда S'уд = S'Ппешеходом , (4.53) �а �П �Ппо известному уравнению Остановочный путь определяют � S =�S П.� � SО = (tt + t2 + 0,5tП3) а у +�а а . ��� ���а (4.56) Совместным решением уравнений построения (4.55) приходим к что выражению � и (4.56) Если в результате масштабного установлено, в Sуд = SП а (4.54) � П был виден водителю ТС, �П момент начала движения пешехода он не (4.57) ��уд � �� � ∆� � ��уд � �� � �� � � ∆� �∆� � �� �. �а �� �� далее такое положение, при котором неподвижный = определяют . Подставляя в выражение указанные на рис. 4.6 обозначения, �� �� � �уд � пешехода ��уд � � �с �, объект не ограничивал видимость места водителя (по- (4.58) получаем уравнение ложение II). � � S'П�∆а , � (4.53) S'уд�= �� ∆ � � удS �= � Далее определяют удаление автомобиля �места �. наезда в мо- (4.55) (4.59) уд П− = + � �� �от , � � �∆ �� � ∆� ��� П �� � � � мент, когда препятствие уже не ограничивало видимости пешехода, SО = (tt + t�2П + 0,5t3) а + а . �уд �П (4.60) Та.н ≥ SП + В��� а − l��� y +а ∆Б, по 3,6 формуле ��� = 3,6 путь, пройденный пешеходом до наезда �а �П �а (4.54) Sуд = SП � (4.54) �П П = S . S П Sууд�а lx (4.56) ах �� и проводят �� сравнение его с остановочным путем S . О = . Подставляя в выражение указанные на рис. 4.6 обозначения, �� Совместным �� решениемисследования уравнений (4.55) и (4.56) приходим кОвыражению Если в результате установлено, что Syд > S , делаполучаем уравнение о наличии у водителя � технической возможности E � � �. предот- (4.57) Va ется вывод •A ��уд � �� � ∆� � ��уд П � �� � �� � � ∆� �∆ S � � �уд ���� �∆ ∆� неравенства Syд < SО делаа � В случае вратить наезд путем торможения. = , (4.55) ∆� �� ��� � � ay × (4.58) ется противоположный вывод. �уд � ���удП �∆ ��� � �, SО = (tt D B Δ y вида уда�уд � аналитическом методе исследования ДТП такого При 3,6 = П 3,6 путь, пройденный пешеходом до�наезда S П �а ление�автомобиля �на пешехода � П от местаSнаезда в тот момент, когда (4.59) + � � � � �. уд = − C � � � водитель имел возможность его = Sу П. находят из подобия (4.56) SП увидеть, VтреуΔx П �а �П �� �� ≥8), SП из + Вкоторого , (4.60) в вы Та.н а − ly + ∆Бследует гольников ABE и BCD (рис. Под= . Подставляя П ��� �� к выражению �� Совместным решением уравнений (4.55) и (4.56) приходим ставляя в выражение указанные на рис. 8 обозначения, получаем получаем уравнение �П Рис. 4.7. Схема наезда на пешехода, вышедшего на проезжую часть справа в уравнение ��уд lx(4.57) ах � �� � ∆� � ��уд � � �� �Sуд�� � � ∆� �∆� � �� �. а поперечном направлении из-за неподвижного препятствия, боковой частью ТС, � �уд �—��69 � � � �, (4.58) уд — движущегося с постоянной скоростью (× – место �уд удара) �П E Va 3,6 = 3,6 путь, пройден •A �а �П � � � Sуд = − + � 55 � � � �. (4.59) � � �� �� = �� �� . Подставляя в выражение указанные на рис. 4.6 обозначения, получаем уравнение � S'уд = S'П а , �а � �уд ��� �∆ �П ∆� (4.53) S'уд = S'П , = �а (4.55) , (4.55) ��П S'П �П, �∆� ��� (4.53) S' ∆�уд ��= �а �а� �П S = (t + t + 0,5t ) + . � О t 2 3 �а �а препятствием, �уд где Dу�– ��� ���а интервал м; Dх – рас� �а .до�наезда SОпройденный =между (tt + t2автомобилем + 0,5t + и а 3) 3,6 = П 3,6 путь, пешеходом ��� 3) ���а+ SО = (tдвижения . �а стояние �П между линией t + t2 + 0,5t пешехода ��� ���а и препятствием, м; �а Sуд = SП �а �П ах, ау – координаты рабочего м (прил. Е); S(4.54) – �П �а S�=аПSу водителя, SудS=места уд (4.56) . ПS � = S (4.54) П = S' , (4.53) S' � уд П уд �� наезда П �� вамомент, �П удаление автомобиля от места когда водитель имел = �П . Подставляя в выражение указанные �� �� �� �� Совместным решением уравнений (4.55) ипуть (4.56) приходим к выражению � пешехода �� = �� . Подставляя в выражение рис. 4.6в обозначения, возможность увидеть пешехода,указанные м; SП�– поле зрения �на а �� �� = . Подставляя в выражение указанные S = (t + t + 0,5t + а . на рис. 4.6 обозначения, О t 2 3) уравнение �� �� до момента получаем ��� ��� водителя наезда, м; l – расстояние от боковой поверх� на р (4.57) ��уд � �� � ∆� � ��уд П � ��у� � �� � � ∆а� �∆� � �� �. получаем уравнение �уд ��� �∆� �а ∆� а м. получаем уравнение �а ности автомобиля до места удара, (4.53) S' = уд = S'ПSуд, = SП (4.54) , �уд ��� ∆� � � �∆� �П ∆� ��� �П �∆� ��� П Из условия равенства времени движения автомобиля и пешехо� �� �∆ =� уд� � � � ,∆ �, (4.55) �удуд� �� (4.58) ∆� �� �П �∆ =� ����а�� , (4.55) �� �� ��уд ∆� ��� ��аП �П �∆ � �� � S = (t + t + 0,5t ) + . = . Подставляя указанные на рис. 4.6 обозначения, О Tв ,выражение tили2 3= 3,6 3,6 путь, пройденный пешеходом до наезд да до наезда (Т = ) путь, пройденный пеше�а а.н П �уд �� ��� �а �П ���� � ��� 3,6�уд= П 3,6�Ппуть, пройденный пешеходом до� наезда � S = − + � � �. (4.59) уд �а �П =до наезда, 3,6 3,6 путь, пройденный �пешеходом до наезда � � ходом � получаем � �П а уравнение Sуд = SП а Sу П . SП =(4.54) � � �а П П �П (4.56) SПП�+�∆ =ВS�ау− l.y +∆��∆ (4.56) П Б, (4.60) Та.н �≥удS�� . , (4.56) SП=�= (4.55) а Sу �� �� ��� ∆Совместным �П �∆� ��� на рис.уравнений (4.55) и (4.56) прих = . Подставляя в выражение 4.6 обозначения, � ��� указанные �арешением �� ��Совместным решением уравнений (4.55) и (4.56) приходим Совместным решением уравнений (4.55) и (4.56) приходим к выражению �удСовместным � решением уравнений (4.55) и (4.56) приходим�Пк выражению к выражению 3,6 = Пах3,6 путь, пройденный пешеходом до�наезда получаем уравнение � � ∆� � ��уд � � l�x� � �� � � ∆� �∆� � Sуд ��уд � �П �а �П а ��П� � �� � � ∆� �∆� � �� �. (4.57) ��уд � �� � ∆� � ��уд� ����∆ ∆�� �� � � ∆� �∆� � �� � ��уд � �� � ∆� �уд��� �. (4.57) (4.57) � � � �� � а уд П �а = , (4.55) � � �� � � � �, уд уд . � (4.56) S = Sу � �� � ∆� ��� П �П �∆ �а �, � � �� � � � (4.58) Решение данного уравнения относительно S приводит к урав� уд уд Va � �уд � ��уд � � �E�, уд (4.58) �•A уд � � � Совместным решением уравнений (4.55) (4.56) приходим к выражению нению второго порядка, которое при и�известных входящих в него 3,6 = П 3,6 путь, пройденный пешеходом до наезда � S = − + � � � �. уд �а �П � � � � � �� � � � �. Sуд = −�П + �может (4.59) ay × значениях остальных параметров быть для расчетов приведе=− (4.59) ��уд � �� � ∆� � ��удSуд�� � �+��П������∆ ��∆�. � ��П� �. (4.57) D �аSП = �S�у .� � B� �ТΔ (4.56) y ≥ S + В − l + ∆Б, но к уравнению вида� а.н П а y �а ��� SП (4.60) Та.н П ≥ S�ПП �+ Ва − ly + ∆Б, �� � ∆�,Б,приходим к выражению (4.58) SП(4.55) + уд Ва � −и � l(4.56) (4.60) Та.н �уд≥ � (4.58) y+ Совместным решением ��� уравнений C ��� VП Sуд Δx в уравнение где Р и Q – числа, зависящие от �параметров, ах � входящих � � ��� �����∆���∆�.� � �� �. (4.57) ��уд � �� � ∆� � ��удSудП =�−S�уд + (4.59) � а Пlx х �а (4.55). ах � Sуд � lx Положительное решение уравнения относительно Sуд име� � � этого (4.58) уда � ≥ SП �� +В − l�y +�∆�, (4.60) Та.нVaП�уд Рис. 4.7. Схема наезда на пешехода, вышедшего на в E Б, проезжую часть справа •A ��� ет вид E Va •A направлении из-за неподвижного � E боковой частью ТС, Va поперечном � �препятствия, •A (4.59) Sуд = − +a� (4.59) � � � �. y � Sуд � ах ay движущегося × lx с постоянной скоростью (× – место удара) B Δ ay удаление ТС × �П до места наезда в момент Затем появления пешехоD B Δ y (4.60) Та.н ≥ SП + Ва − ly + ∆Б, D B Δy да в поле обзорности��� водителя из-за SП Sуд 55 неподвижного препятствия SП Va C сравнивают с SО и делают вывод о наличии уEводителя технической •A C VП lx Δx Sуд наезда на пешехода. ах возможности в данной ДТС избежать V Δ x П aПри × П перехода y необходимости проверяют условие безопасного ПD B Δ y Рис. 4.7.ТС, Схема наезда пешехода, вышедшего на проез пешеходом полосы движения которое длянаварианта фронталь4.7. Схема наезда на пешехода, вышедшего на проезжую часть справа вSП E VРис. a •A Рис. ного 4.7. Схема вышедшего на проезжую частьCсправа в поперечном направлении из-за неподвижного препятствия наезданаезда имеет на видпешехода, поперечном направлении из-за неподвижного препятствия, боковой частью ТС, VП ×скоростью Δбоковой поперечном препятствия, частью ТС,(× – мес x ay направлении из-за неподвижного движущегося с постоянной — 70 — движущегося с постоянной скоростью (× –BместоΔyудара) ПD движущегося с постоянной скоростью (× – место удара) SП 55 Рис. 4.7. Схема наезда на пешехода, вышедшего на проезжую частьCсправа в 55 (4.58) �уд � ��уд � � � �, Та.н Va �П ��� � � � Sуд = − + � � � � �. � (4.59) � ≥ SП + Ва − ly + ∆Б, (4.60) (4.60) где Та.н – время движения автомобиля до наезда на пешехода, с; Ва – габаритнаяаширина автомобиля, м; ∆БS– lx х уд расстояние безопасности, м. Расчетная схема наезда на пешехода боковой частью автомобиля, движущегося с постоянной скоростью, приведена на рис. 9. E •A ах ay Va lx Sуд B E •A ay B × Δx D VП SП П Δy Рис. 4.7. Схема наезда на пешехода, вышедшего на × D Δy Δx VП проезжую П C SП C часть справа в поперечном направлении из-за неподвижного препятствия, боковой частью ТС, Рис. 9. Схема наезда на пешехода, вышедшего на проезжую часть справа движущегося скоростью (× – место удара) 4.7. Схема наездаснапостоянной пешехода, вышедшего на проезжую часть справа в в Рис. поперечном направлении из-за неподвижного препятствия, боковой поперечном направлении из-зас неподвижного препятствия,(×боковой частью ТС, движущегося постоянной скоростью – месточастью удара)ТС, 55 движущегося с постоянной скоростью (× – место удара) При исследовании наезда с нанесением удара пешеходу боковой поверхностью автомобиля (рис. 4.7) можно применить полученные При исследовании с нанесением удара пешеходу боковой выше зависимости, но с наезда внесением некоторых изменений. поверхностью автомобиля (рис. 4.7) можно применить Из подобия треугольников ABE и BCD на рис. полученные 9 получаемвыше про�� �� �� �� = , из которого при подстановке принятых на рисунке обозначений зависимости, но с отношение внесением некоторых изменений. , из которого при подстановке порциональное = , из которого при подстановке принятых на �� �� �� �� Из подобия треугольников ABE и BCD на рис. 4.7 получаем �� �� получаем уравнение вида принятых рисункепри обозначений получаем уравнение видаобозначений = , из на которого подстановке принятых на рисунке получаем вида �� ��уравнение �� пропорциональное �� отношение = � ∆, из которого при подстановке принятых �уд � ���� �� ∆� � �уд � �� �(4.61) ∆� (4.61) ∆� � . получаемнауравнение вида � . �� �уравнение ∆� �П � ∆� рисунке обозначений получаем вида �� � ∆� �П � ∆� �� �� �уд��уд������ �принятых ∆∆�от = , из которого при подстановке на рисунке обозначений ∆ ∆ � Путь, проходимый пешеходом момента его обнаружения во� � � �� �� � П . . (4.61) (4.61) � �П SП �=��(S �� � ∆уд�∆�+ lx) ��а�П,П��∆�∆� SП = (Sуд + l(4.62) , x) дителем до наезда, определяется из отношения �а получаем уравнение вида Путь, проходимый пешеходом от момента его обнаружения водителем до �П ∆ � �уд � �� � ∆� (4.62) (4.62)∆��а �уд � �� � ∆� (4.63) = ∆lx�) �а , � а . �уд � �S�П �= ∆ (Sуд + наезда, определяется из отношения = ∆� ����� ��уд � . ����П � ∆� �а (4.61) ∆ � � ��уд � �� ��П � ∆� � �� � ∆� �П � ∆�� ТС до места удара,� м. � где lх – расстояние от переднего бампера �уд� (S∆уд� +=lx) П, ∆� �а (4.62) S�ПП�=� � . (4.63) �П Та.н � �≥(4.62) Ва�уравнение а+ ∆Б. П в ��SП�+ � �� ��П � ∆� �а(4.61) Подстановкой выражения Та.нприводим ≥ (4.62) SП +(4.64) Ва + ∆Б. SП = (S∆��� , ��уд уд + lx) ��� �а до места удара, м. где lх – расстояние от переднего бампера ТС его к виду �∆ П� �∆� ��� � � + ∆+Б.ly. приводим его к ∆виду (4.64) � �∆� �� � =��� (4.65) П+В а∆ �уд �SТ �П � ∆� ≥в S Подстановкой выражения (4.62) ∆+ �а.н � �а y(4.61) SП = (4.63) + ∆ y + ly. �уд=��уравнение � �∆� . (4.63) �� �∆ � уд � � ∆� � ���уд � �� ���∆уд � �� ��П ∆�� �∆а� �а ∆� �∆���� � (4.63) аx Sуд � SП =∆�� �� = а���уд+� �∆ � ∆l�y� . а. SSпн (4.65) � �� y П+ �уд ��� �∆�x П уд аx Va •A а S Та.н ≥ SПS+ ю Ва + ∆Б. ��� Sуд ∆� �∆— 71� 75 — � �� Sю� + ∆y + ly. SП = �уд ��� �∆� •A × V a Sпн S (4.64) Sю (4.65) Ва × �� = �� , из которого при подстановке принятых на рисунке обозначений получаем уравнение вида �уд � �� � ∆� ∆ � � . (4.61) Решая это соотношение �� � ∆относительно �П � ∆� Sуд и сравнивая его затем � с SО, определяем наличие технической возможности у водителя �П SПнаезда = (Sуд на + lпешехода. , (4.62) x) в данной ДТС избежать � а Решая это соотношение относительно Sуд и сравнивая его затем с SО, Условие безопасного перехода пешеходом полосы движения ТС �уд � �� � ∆�возможности ∆� �а у водителя определяем наличие технической в данной (4.63) ДТС = . ∆� � ��частью ��удимеет � �� ��Пвид � ∆� �а для варианта наезда боковой избежать наезда на пешехода. �П (4.64) ≥ SП +пешеходом Ва + ∆Б. полосы движения ТС (4.64) Та.н перехода Условие безопасного для ��� варианта наезда боковой частью∆имеет вид �∆ �� � Если из сравнения Sуд и S� О �последует вывод об отсутствии у во� SП = + ∆ y + ly. (4.65) � ���П�∆ �уд Та.н ≥предотвратить SП + Ва + ∆Б. (4.64) � дителя технической возможности наезд путем тормо��� жения, необходимоSудпровести последует вывод возможности об Sотсутствии убезопасводителя Sуд и SО исследование пн �� �� аxЕсли из сравнения = , перехода из которого при подстановке принятых ТС на рисунке обозначений S пешеходом полосы движения с использованием ю �� ного �� технической возможности предотвратить наезд путем торможения, необходимо представленного выражением (4.64). получаемусловия, уравнение вида провести исследования возможности безопасного перехода пешеходом полосы �уд � �условия, •A � � ∆� движения ТС, с использованием представленного выражениемВ(4.64). × ∆� а Va � . 4.4.2. Исследование�наезда при� движении автомобиля (4.61) � � ∆� П � ∆� с торможением � l ay ∆y 4.4.2. Исследование наезда при автомобиля с торможением (4.62) SП = вышедшего (Sудy движении + lx) П, из-за Если наезд на пешехода, неподвижного препятS�Па Если наезд на пешехода, вышедшего из-за неподвижного препятствия, ствия, произошел в процессе торможения ТС, исследование можно �уд � �� � ∆V ∆� � �П а = . (4.63) произошелв последовательности, в процессе его ∆торможения, исследование можно провести в провести аналогичной рассмотренной выше. � � �� � � �� � ∆ � � � уд � П � а последовательности, аналогичной рассмотренной выше. Перемещение пешехода�от момента его обнаружения водителем до Та.н П ≥ SПП + Ва + ∆Б. (4.64) ���момента его от обнаружения водителем до наезда наездаПеремещение определим, пешехода воспользовавшись уравнением (4.55), из которого ∆x ∆� �∆� ��� �(4.55), из которого определим, воспользовавшись уравнением + ∆ y + ly. (4.65) SП = (4.65) �уд ��∆���∆ �∆����� � Рис. 4.8. Схема наезда на пешехода, вышедшего на проезжую часть справа в + ∆ y + ly. (4.65) SП = �уд ��� �∆� аx Sуд Sпн поперечном направленииаx из-за неподвижного препятствия, передней частью ТС Sуд S Sпн ю Sю в процессе торможения (× – место наезда) Va •A Va ay ∆y ay ×× •A ∆y SУД = �П � �П аl � y ��а ��Н �� ly ���а Ва . (4.66) S ��SП � �� �� SП = ��уд � Vа П НП � П. �а VП ���а ∆� �∆� ��� � + ∆y + ly =П��уд � ∆x П км/ч. где VН – скорость наезда на пешехода, ∆x �уд ��� �∆� Ва ��а ��Н �� ���а (4.67) � �П �а , (4.68) Рис. 10. Схема наезда на пешехода, вышедшего на проезжую часть справа в поперечном из-за неподвижного препятствия, передней Рис. 4.8. Схема наезданаправлении на пешехода, вышедшего на проезжую часть справа в 76 частью ТС в процессе торможения (× – место наезда) 56 поперечном направлении из-за неподвижного препятствия, передней частью ТС — 72 в процессе торможения (×— – место наезда) Рис. 4.8. Схема наезда на пешехода, вышедшего на проезжую часть справа в П Рис. 4.8. Схема наезда наиз-за пешехода, на проезжую часть справа ∆x вышедшего поперечном направлении неподвижного препятствия, передней частьювТС поперечном направлении из-за торможения неподвижного передней частью ТС в процессе (× препятствия, – место наезда) Рис. 4.8. Схема наезда на пешехода, вышедшего на проезжую часть справа в Используя уравнение (4.21), определим удаление ТС от места в процессе торможения (× – место наезда) поперечномнаезда направлении из-за неподвижного препятствия, передней частью ТС в момент обнаружения водителем пешехода: � � ��а ��Н � наезда) в процессе торможения (4.66) SУД = П �а(× �– место . ��ПП ��а ��� ��На�� SУД = �а � . (4.66) П Тогда путь, пройденный�пешеходом, из выражения ��а��� ��На��определится �П SП = �� � � . (4.67) � � уд ����� а �� ��� �� НаН SSПУД==��Пуд�а����а �� . Па. (4.66) � (4.67) �П ��� ��� ��� аа а а ��Н �� �П ∆� �∆� ��� � + ∆y + ly�� = �� ��уд � � , (4.68) � � ���На�� �� ��уд�∆�� а (4.65) Н� Пи � �∆ а Совместное ∆решение уравнение � �� Пдает S�П��=+уравнений �� � �� .а ��(4.66) (4.67) ∆yуд+ � ly = ��� ��уд � � , (4.68) �а ���а а ��� �∆� �а вида наезда на�уд пешехода, км/ч. где VН – скорость ∆� �∆� ��� � ��а ��Н �� �П км/ч. где VН – скорость наезда на пешехода, +∆ � , (4.68) (4.68) y + ly = ��уд � �уд ��� �∆� ���а �а где VН – скорость наезда на км/ч. пешехода, км/ч. наезда на пешехода, где VН – скорость 56 Наличие или отсутствие возможности остановки автомобиля до 56 линии следования пешехода при своевременном принятии мер во56 дителем проверяется по условию SУД ≥ SО. При наезде с фронтальным ударом (рис. 10) возможность безопасного перехода полосы движения автомобиля пешеходом проверяется по условию Tа.н �П ��� ≥ SП + Ва − ly, (4.69) (4.69) �П где Tа.н – время движения автомобиля до наезда на пешехода, опре≥ SП3 + + �Ваа�−�нl.y, (4.69) Tа.н = t1 T+а.нt2 ��� + 0,5t (4.70) ��� деляемое по формуле � �� н �уд ��а а Tа.н =�Пt�1 �+���tП2∆Б+ ≥0,5t + . ly , Tа.н�П ≥ SП +�3аВа. −��� Va (4.70) (4.70) (4.71) (4.69) ��� �уд ��а пешехода с постоянной �П �� �����ТС ∆� Б ∆ мимо Беспрепятственный проезд П . �н (4.71) �П � ≥Б 3,6,�а � ТПT (4.72) T t + t + 0,5t +В�ааусловия (4.70) � а.н = 1= 2 3 ≥ S + −���ly, . (4.69) П �П П скоростью Va возможен приа.нвыполнении ��� �П +Б �� Ва − ly , (4.69) T � �∆��П�П�∆�≥ �S �∆ �П (4.69) �TПа.н а.н=��� а�аа− � l�y, уд В �� ≥�Б�SП�+ Т 3,6, (4.72) Т' (4.73) (4.71) . н. (4.71) Tа.н = tП1П= +�t��� (4.70) �П≥3,6, 2 �+ 0,5t 3+ �а �а��� П П �� �а � �нн. T tt1 + tt2 ∆+ 0,5t (4.70) а.н = 3+ �� T = + + 0,5t + . (4.70) ��� �∆ ��� а.н 1 2 3 � � � � ∆ ∆ � � � � � �� � � � ∆ П � Б � � Если в расчетах окажется, что пешехода, опре- (4.73) Буд движения а ��� ПП = �П Бвремя < ��П≥ 3,6, ,3,6, Т�Т' (4.72) . (4.71) П= � � � � � �� П П � � � � ∆ а а деляемое зависимостью �ПП � �П�� � ∆ББП ≥ �уд уд ��а. (4.71) �П � �� � ∆Б ≥ ∆ �� �� � . (4.71) ��П∆ ∆� �∆� ��� � ���а∆�� ���<��� �П � Б � Наа�, �ПП � (4.72) + ∆yТТ'=ПП��� � 3,6, � �� � . (4.74) = (4.73) = 3,6, (4.72) � уд П П �а �уд ��� �∆� ��� ���� �П � ∆Б а �П �П�П� � � ∆Б 3,6,� Т (4.72) П= ∆ �∆ �� � Т = 3,6, �� � �� �П из выражения (4.72) � � � � П а Н � ��=� ∆∆Б ��П ∆�� � ��полученное меньше, чем время движения пешехода, �� +�П∆ � � � . (4.74) П y =���уд � < , Т' 3,6, (4.73) П ���а �а �уд ��� �∆� П ����П Sуд Т'�ПП = ∆∆���� Sпн аx � � 3,6, (4.73) (4.73) Т' = 3,6, (4.73) � ∆��� � �а��� ∆� �∆� ��� � �П � �П �П � � ∆Б �П �S Н �ю П + ∆y �= ��уд<� � , � �� � . (4.74) то есть а �а Sпн �уд ��� �∆�Sуд�П � �П� � ∆Б ∆ � �� а П��� x �П � �� � ∆Б < ∆� � � �� , < , � � � S ∆� �∆� ��� � �� � �П �П�� � ю + ∆y =П��уд � Па Н � � �� � П. •A Ва(4.74) �� �∆��� ��� �∆уд �∆ �� �� � �� � а � � S�уд+ ∆y = �� � ��аа ��НН�� � � � ���аSПП.пн аx ∆� �∆� ��� (4.74) уд � — 73 — (4.74) �уд ��� �∆� + ∆y = ��уд � ���аS � �� � �а . ���а ю �а �уд ��� �∆� •A Va ay ∆y аx Sуд lх × SП Sпн L a Ва водителю своевременно заметить пешехода. Тогда все расчеты следует проводить в последовательности и по методике, как при анализе наезда при неограниченной видимости и обзорности. это будет что неподвижный объект, из-заповерхностью которого вышел пеПриозначать, анализе наезда с ударом пешехода боковой ТС (рис. шеход, не ограничивал обзорности и его нельзя считать препятствием, 4.9) уравнение (4.65) примет вид ∆� ��∆ мешавшим водителю своевременно заметить Тогда все рас�� �� �� пешехода. � � ��� � + ∆y = ��уд � а Н � �� � П. (4.74) ���а �а �уд ��� �∆� четы следует проводить в последовательности и по методике, как при анализе наезда при неограниченной видимости и обзорности. аx Sуд Sпн Sю •A Va ay Ва ∆y Tа.н �П ��� × lх ≥ SП + ВаS− ly , П Tа.н = t1 + t2 + 0,5t3 + �а � �н П��а �П � �� � ∆Б VП �уд ≥ ∆ �Пx Т = �П � �� � ∆Б ��� (4.69) La . (4.70) . (4.71) 3,6, (4.72) �а П Рис. 11. Схема наезда на пешехода, вышедшего на проезжую часть справа �П в поперечном направлении из-за ∆неподвижного препятствия, боковой � � �� частью ТС в процессе Т'П торможения = 3,6, (× – место наезда) (4.73) �П При анализе наезда с�Пударом боковой поверхностью � �� � ∆Б пешехода ∆ � � �� <78 , �П П ТС (рис. 11) уравнение (4.65)�примет вид ∆� �∆� ��� � �уд ��� �∆� Va + ∆y = ��уд � ��а ��Н �� ���а � �� � �П �а . (4.74) (4.74) Для рассмотрения наезда на пешехода боковой поверхностью Sуд необходимо иметь данные Sпно продольной аx ТС в процессе торможения S ю координате точки удара lх (рис. 11). Остается подставить в уравнение (4.74) все входящие в него параметры•Aи определить Sуд, которое потом сравнить с остановочным В а путем SО. технической возможности ∆y lх ×у водителя остановить автоay Наличие SП своевременномLaпринямобиль до линии следования пешехода при тии мер торможения проверяется по известному условию SУД ≥ SО. Возможность безопасного перехода полосы движения автомоVП П биля пешеходом при ударе ∆боковой поверхностью ТС в процессе x торможения проверяется по условию — 74 — Рис. 4.9 T �П ≥S +В. (4.75) ∆x ∆x VП VП П П Рис. 4.9 �П Tа.н ≥ SП + Ва. (4.75) (4.75) ��� 4.9 Рис. Рис.ТС 4.9мимо пешехода �уд ��а ��� Для безопасного проезда ско�П � ∆Бс постоянной � ≥(4.75) . Tа.н П ≥ SП + Ва. � �а П �П ��� ростью необходимо выполнение условия Tа.н ≥ SП + Ва. (4.75) ��� ∆� �уд ��а ��� �П � ∆Б �П � ∆Б < (4.76)(4.76) ≥ . �П �� �П � ∆Б�П �уд ��а ����а ≥ . (4.76) �П �а∆ ∆� � При выполнении условия Б неподвижный объект,�Пнаходящийся справа от ТС, не ограничивал об < (4.77) �П � ∆Б�П ∆� �� < (4.77) водитель мог видеть�пешехода в момент его выхода(4.77) на проезжую част �� П неподвижный объект, находящийся справа от ТС, не ограничивал обзорность и неподвижный объект, находящийся справа от ТС, не ограничивал неподвижный объект, находящийся справа от ТС, не ограничивал обзорность и водитель мог видеть пешехода в момент его выхода на проезжую часть. обзорность и водитель мог видеть пешехода в момент его выхода на водитель мог видеть пешехода в момент его выхода на проезжую 57 часть. проезжую часть. 57 57обзорности, ограниченной 4.5. Наезд на пешехода при движущимся препятствием Экспертный анализ наезда на пешехода, вышедшего из-за движущегося препятствия, ограничивающего обзорность с места водителя, на предмет определения технической возможности его предотвращения проводят как графическим, так и аналитическим методом. Для проведения этого анализа кроме исходных данных о движении ТС и пешехода (направление, скорость и режим движения) необходимы сведения о характере перемещения подвижного препятствия. Если скорость попутно движущихся автомобилей одинакова, необходимы сведения о дистанции и боковом интервале между ними. При движении с разными скоростями нужны данные о расстоянии ∆y между пешеходом и автомобилем, ограничивающим обзорность, когда пешеход закончил пересечение полосы движения этого ТС (рис. 12). Анализ наезда на пешехода при движении обоих автомобилей с одинаковой скоростью начинают с проверки представленных исходных данных, которая состоит в определении наличия возможности у пешехода беспрепятственно пересечь полосу движения первого автомобиля. Если из этих расчетов следует, что при указанных в постановлении данных должен был произойти сначала наезд на пешехода первым автомобилем, значит, исключается возможность — 75 — наступления рассматриваемого происшествия в виде наезда вторым автомобилем, и проведение дальнейшего исследования вопросов не имеет технического смысла. Обнаруженные в исходных данных противоречия указываются экспертом в своем заключении. аx Va1 I ay Sа1 • III' × III ∆х Δy Va2 I II VП Sа2 ly SП •II' I' III S'П Рис. 4.10. Сх Рис. 12. Схема фронтального наезда на пешехода, вышедшего на проезжую часть справа в поперечном направлении из-за попутно движущегося пешехода на проезжую ax ТС; I – ТС в момент Sвыхода a1 часть; II – ТС в момент выхода пешехода из полосы движения ТС, ограничивающего обзорность;EIII – ТС в момент наезда;D Va1 I’,А•II’, III’ – пешеход в указанные моменты времени × аy ly При отсутствии противоречий в исходных данных эксперт пе∆y B реходит к исследованию технической возможности водителя автоSП Va2 мобиля предотвратить наезд на пешехода с момента, когда другой автомобиль не ограничивал обзорность. C Sa2 В экспертном исследовании наезда на пешехода в случае движеП ния ТС с разными скоростями следует определять последовательно Рис. 4.11. Схема для определения ширины зоны обзорности с места водителя (× положения обоих ТС и пешехода в различные моменты времени до – место удара) нахождения такого положения, при котором автомобиль, ограничи�� �� � , которая при подстановкеограничение принятых обозначений приобретает вид вающий не создавал обзорности с рабоче�� обзорность, �� ��� �� � �� � ���� го места водителя автомобиля, совершившего � �� �, наезд. (4.78) ∆� ��� �обз Исследование лучше всего начинать с определения расчетным �∆� ��� ����� ��� � = , наезд, в тот момент, (4.79) Вобзсовершившего путем положения автомобиля, ��� ��� ���� когда пешеход заканчивал пересечение полосы движения автомо� Sa1 = SП ��; (4.80) �П биля, ограничивающего обзорность (положение II′, рис. 12). При этом отпадает необходимость проводить дополнительные расчеты, чтобы определять, попадает или нет при указанных исходных дан58 ных пешеход под автомобиль, ограничивающий обзорность. — 76 — 4.5.1. Наезд на пешехода при обзорности, ограниченной движущимся попутно препятствием Рассмотрим последовательность проведения анализа наезда на пешехода движущимся с постоянной скоростью ТС при обзорности, ограниченной движущимся попутно по соседней полосе справа препятствием, которым обычно является ТС (рис. 12). Для проведения такого анализа необходимы следующие исходные данные: • скорость автомобилей Vа1 и Va2; • направление и скорость движения пешехода VП; • боковой интервал между автомобилями ∆y; • путь, пройденный почасти проезжей части до наезда, ; правого автомобиля до Sлинии • расстояние ∆пешеходом х от передней П • расстояние l от боковой поверхности автомобиля до места удара; движения пешехода в момент его выхода из полосы его движения; у • расстояние ∆х отрабочего передней правого • координаты местачасти водителя аx и ay. автомобиля до линии движения пешехода в момент его выхода из полосы движения; При исследованиях принимается, что пешеход вышелего из-за передней или с подстановкой указанных на рисунке параметров • координаты рабочего места водителя а и a . x y части автомобиля-препятствия и до наезда автомобили и пешеход двигались �П ��� ���что ∆ � ��� При исследованиях принимается, вышел из-за(4.89) � пешеход , равномерно. � �уд ��� �уд ��� �∆� передней части автомобиля-препятствия и до наезда автомобили Для решения вопроса о том, была ли у водителя автомобиля, согде ∆' х = ∆х + Sа2; Sа2 – путь, пройденный автомобилем № 2 из положения I в и пешеход двигались равномерно. вершившего наезд,IIвозможность пешехода, из начавшего движение положение (рис. 4.13) увидеть и определяемый зависимости (4.90);поS – Для решения вопроса о том, была ли у водителя автомобиля, П на проезжей части, необходимо определить ширину зоны обзорности обз момента пройденный пешеходом путь с момента входа в зону обзорностиВдо совершившего наезд, возможность увидеть пешехода, начавшего уровненаезда, линии следования пешехода (рис.(4.91): 4.11). определяемый по формуле движение по проезжей части, необходимо определить ширину зоны � Рассмотрим последовательность проведения наезда на пешехода(4.90) Sa2 = S'П �� анализа обзорности Вобз на уровне линии следования �П пешехода (рис. 13). передней частью ТС без применения торможения. � (4.91) SП = Sуд П . ax Sa1 ��� Из совместного решения уравнений (4.90), (4.91) и (4.89) получим Va1 E D А• зависимость для определения удаления ТС от места наезда в момент появления × неограниченной обзорности пешехода Sуд, описываемое уравнением (4.92). аy ly ∆y B а) I' SП Va2 VП I Va2 C Sa2 ay ∆x Va1 П Sa1 Рис. 13. Схема для определения ширины зоны обзорности Рис. 4.11. Схема для определения ax ширины зоны обзорности с места водителя (× I •А с места водителя (× – место удара) – место удара) б) — 77 — VП S'П Из подобия треугольников ADC и ABE следует пропорция Va2 II' С II которая при подстановке принятых обозначений приобретает вид �� �� � �� �� , a1 SП × C C S a2 аy ly C П S a2 ∆y последовательность проведения B Рассмотрим анализа наезда на Рис. 4.11. Схема для определения ширины зоны обзорности с места П водителя SП (× Va2частью ТС пешехода передней без применения торможения. П Рис. 4.11. Схема для определения ширины зоны обзорности с места водителя (× – место удара) Из подобия треугольников ABE следует пропорция Рис. 4.11. Схема для определения ширины ADC зоны и обзорности с места водителя (× – место удара) �� �� котораяпри приподстановке подстановке принятых обозначений приоб� , которая принятых обозначений приобретает C вид Sa2 – место удара) �� �� ���� � , которая при подстановке принятых обозначений приобретает вид ��ретает �� вид �� �� ��� ��� ���� � ��� � , которая при подстановке принятых приобретаетПвид � ��обозначений , (4.78) �� �� �� �обз ��� ��∆���� ��� �� ��� � (4.78) � , (4.78) Рис. 4.11. Схема для определения ширины зоны обзорности с места водителя (× ∆���� ��� �� ����� ���� �� обз � �∆ ��� �S� �� , ���� (4.78) �� ax a1�� ∆ �� , (4.79) �= обз зависимостью откуда обзорность Вобз = СD�Вопределится –обзместо удара) �∆� ������ ��� �� ������ ����� (4.79) Вобз =�∆ �� ��� �� � , ����� �� �� ax S�� � ���� D' Va1 � a1��� �� (4.79) � , которая при подстановке принятых вид ВобзS=a1 E' , обозначений приобретает (4.79) = �S��П�� ; (4.80) �� А'• �� ��� �П� ���� × =� SE' ; (4.80) П �� � �� D' Va1 где ∆y – боковой интервалSa1 � �� �� �П �� ��� между автомобилями, � �� �, м; ах, ау – коорди(4.78) Sa1 = SП∆ �� ; (4.80) А'• �обз ��П � ×ly ay наты места водителя в автомобиле, совершившем наезд, м; Sa1 – удаΔy �∆В' ление автомобиля, совершившего наезд, от�� �� места наезда в момент � ��� ��� �� Вобз = 58 , (4.79) ay ly �� �� � �� � �� начала движения пешехода по проезжей 58 В' части, м: Δy Va2 S П � Sa1 =58SП ��,; (4.80) (4.80) �П V S Δ'x C'Пм; VS',П a2 где S – путь пешехода по проезжей части до места наезда, А• Va2 Sa2 a1 П VП – скорость автомобиля, совершившего наезд, и скорость Δ'x C' ПS'П пешехода, км/ч; Sa2 – удаление автомобиля-препятствия от линии Рис. 4.12.58 следования пешехода в момент начала движения пешехода по П Рис. 4.12. проезжей части, м, Sa2 = ��� ��� T'П + Δх, (4.81) (4.81) � �из�� где ТП′ – время движения пешехода положения I′ в положение II′ ��� � � = �� T' ПП +�Δ (4.81) х, ∙ 3,6. Т'П = SПa2∙ 3,6 (4.82) ���= (рис. 12): �П �П � � �� �� �П П � � (4.82) С помощью значенияТ'ВПобз вопроса = проводим ∙ 3,6 = дальнейшее ∙ 3,6. исследование (4.82) �П �П анализом неравенства С помощью значения проводим дальнейшее исследованиевопроса С помощью значения ВобзВобз проводим дальнейшее исследование вопроса анализом неравенства Вобз − ay + ly ≥ SП. (4.83) анализом неравенства Вобз −� ay +��l�y �≥ SП. (4.83) � �� � � �ly, ≥ SП. В�обз � ��− ay�+ � При выполнении неравенства (4.83) следует, что при Va1 > Va2 � � �� � � �П ��� ��П����� � � �� �� � , автомобиль-препятствие не ограничивал водителю автомобиля, со� � � �� � � . �уд ���� � �уд ��� ��� вершившего наезд, видимости � пешехода в момент начала его движе� �� �� �� �� ��� �ПП � П � � . a1 − SVуд)=���V. значение ния поS'проезжей Здесь ; При Δ' =равенстве Sa2 − S'�a2 ;�� Sскоростей =�(S П = (Sa1 − Sчасти. уд) х�� a2�� � a1 � a2 уд � уд � ��� �� Sa1 является расстоянием видимости пешехода, т. е. Sа1 �= Sуд. �П �� �П Здесь S'П�имело = (S��a1�− ) ��условие − Sначала . ��S� �; �Δ'�х = Sa2 − S'a2; Sa2 =�(S уд�� уд) П� � �a1 � Если место ��� уд ���Va1 < Va2, то в∆момент ��� движения � ������� . ��� �уд � �� части автомобиль-препятствие �уд � ��� � ��� ��ограничивал � пешехода�по� �проезжей �П ��� ��� П � � �� � ���� � �уд � � ∆ � � � � �� . ��� �� � —��78� — �уд � �� �� �� � � �� � � �� Sуд = �уд � ���� �. ����� �� � � � � �� (4.83) (4.84) (4.84) (4.85) (4.85) (4.87) � �. (4.87) Sуд =(Sуд�) � автомобиля, совершившего наезд, от Полученное значение удаления �П ��� ��� ∆� ��� неограниченной обзорности пешехода S� уравнением (4.92). уд, описываемое (4.89) ����уд �� ��� ���� �∆�� , �� � ��� � �� �уд , (4.79) Вобз = ��� ��� �� а) �� где ∆'х = ∆х + Sа2; Sа2 – путь, пройденный автомобилем № I'2 из положения I в Sa1 боковой интервал между автомобилями, м; ах, ау – координаты места где ∆y – a x положение II (рис. 4.13) и определяемый из зависимости (4.90); SП – VП водителя автомобиля, в автомобиле, совершившего совершившем наезд, м; Sa1видимость – удаление пешехода, автомобиля, водителю наезд, I пройденный пешеходом путь входа в зону обзорности до момента axax E' с момента D' Va1 Va2Sa1 a1 начала движения совершившего и необходимо определить Sуд Sавтомобиля, совершившего наезд, от местаудаление наезда в момент пешехода по А'•наезда, определяемый по формуле (4.91): × ay ∆x наезд, от места наезда в момент, когда это ограничение прекратилосьD' ��� E'E' Va1 D' Va1 проезжей части, м: = S' (4.90) S Va1 a2� Sa1 П �П А'• a x А'• (точкаaС′, рис. 14). I •АS = S �� ; l (4.80) y y× × a1 П �П S�П = Sуд a1 . (4.91) SПВ' Δy ��� E' Va1 a S x a1 ax aА'• lD' yay yl Из совместного решения уравнений (4.90), (4.91) и (4.89) получим × y Δ В' б) V S y Δy a2 Va1 E' В' D'П зависимость для определения удаления ТС от места наезда в момент появления А' • × aнеограниченной S'П S (4.92).ly y П Va2 Δ'x Vуравнением C' ПSП S'П Va2 обзорности пешехода Sуд, описываемое Δayy В' ly Va2 II' С а) II Δy В' I' В Δ'Δ' SC' x П ПC' П S'S' Va2 x Рис. 4.12. ∆y Va2 Va1 ay I I Va2 Е IIРис. AРис. 4.12. 4.12. S уд � Sa2 =V �� T'П + Δх, ��� a1 •А Рис. 4.12. ���� Sa1��� ��� �П� П ��� S = ly IIIΔ'x Δ'x ∆x П S VП SП П ×D III' C' C' S'П П ПП S'П П(4.81) T' + Δ , (4.81) П П + хΔ Sa2 =��� T' , (4.81) х3,6. Т'П = ∙ a2 3,6 (4.82) Рис. 14. Схема к определению удаления от∙места наезда в момент ��� �ТС �aПx Рис. 4.12. Схема к определению удаления ПТС от места наезда в момент появления неограниченной обзорности в направлении движения 86 �П��� �П�� � � �� � � �� � �� б)Пудара) появления неограниченной обзорности в =направлении пешехода (× –вопроса С помощью значенияпешехода ВТ'обз – место =проводим ∙ движения 3,6. (4.82) �� ПП Т' = (×П∙ 3,6 ∙ �3,6 =дальнейшее ∙ 3,6.исследование (4.82) S�Пa2�П= T'П +�ПΔ�Пх, (4.81) ��� место удара V S' анализом неравенства П П определения удаления Sуд воспользуемся подобием треугольСДля исследование Спомощью помощьюзначения значенияВобз Вобз проводим исследованиевопроса вопроса �П ��дальнейшее ��� � �проводим �дальнейшее V II' С Т'П14), =В Пиз∙−3,6 ∙ 3,6. (4.82) a2 = ников A′C′D’ и А′В′Е′ (рис. которого следует соотношение a S (4.83) обз y + ly ≥ П. � � II П П анализом где Sнеравенства – путь пешехода по проезжей части до места наезда, м; Va1, VП – Sскорость анализом П неравенства В П � �проводим �� �� � � дальнейшее исследование вопроса Савтомобиля, помощьюсовершившего значения Внаезд, обз В и� скорость , lyпешехода, − a a+ ∆ обз В − l≥y ≥SПS.П. ly км/ч; Sa2 – удаление (4.83) (4.83) � � �y + y обз �� ��y� автомобиля-препятствия от линии следования начала �� � � �� ���Е� пешехода в×Dмомент анализом неравенства V III' � � � a1 �� �� � � при подстановке в которое обозначений приходим к вы� �� П � принятых � � �� �� II A П �� � ��� ,�� , . III ����м: (4.84) движения пешехода по проезжей части, � ��S ��� � � � уд � �� � �� �� В − a + l ≥ S . (4.83) ражению уд � обз уд �y � П y Здесь S'П = (Sa1 − � � ��� �П��� ���� ����х�� � �� � � � S�a2�� ,� �� П= � �T'П�+ � Δ П �� � �П���� �a2 . .− ��;удS��� Sуд) ; Δ'�худ�=��S�� = (S�a1 a2 − S' a2 �� � , � � � ��� �� ��� уд ��� � �� ����уд �П Sуд) ��� . (4.81) (4.84) II' (рис. 4.10): где Т'П – время движения пешехода из положения I' в положение��� � (4.84) (4.84) � � П� � �� �� ��� �� �� Здесь =��(S�(S −�−S��удS��)уд��)ПП�Т'��� ;ПΔ' Sa2 −�−ПS'��S' ;a2 S86 (S − −SудS)уд)���.��. (4.82) � �;�Δ' П= П a1�a1 х�П= a2 a1 a1 П� � ЗдесьS'�S' Sa2 ;�∆a2S∙��3,6. Здесь �=�.= П= a2 � (S � (4.84) ����уд ������ П =���х∙ 3,6 = �� �П � �П�� �� � . (4.85) �уд �� �уд ��� �� � � �� ��� �уд � �� � ��� � ��� ��� �П� �уд � � �П�� � � �этих ����� � � �� � П S ′, �� Подстановкой значений Δ ′ и ∆S�∆а2��′��� (4.84) ���� � �� �в уравнение � П �� �� � �� �уд П Здесь S'П = (S ; Δ'худ=����S�� −П83 S'�a2����;х�� Sa2 = (Sa1������−� Sуд) ��. . � (4.85) a1 − Sуд) a2 � (4.85) �� �� ��� ��� �уд�уд �� �� �� получим зависимость �� � �уд�� �� ������ �� �� ������ ��� � � уд �� � � �� �� � ��� ���� �. (4.87) Sуд = � �П � �� � �� � ���� � �уд � �П � ��� � ∆ �� � � ���� � . (4.85) �� ���� ��� ��� =�=�)�� �� �. (4.87) SудS(S автомобиля, совершившего наезд,(4.85) от Полученное значение �уд �удаления �� � �. (4.87) � � � ��� ��� уд уд уд �� � �� � � �� � �� места наезда в момент, когда автомобиль-препятствие уже не ограничивал ) автомобиля, Полученное значение удаления � числовыхсовершившего При подстановке в зависимость (4.85) значений вхо-наезд, уд )�автомобиля, совершившего наезд,отот Полученное значение удаления(S � (S (4.87) Sуд = �уд� � �. � � дящих в него параметров и после соответствующих преобразований места местанаезда наездав вмомент, момент,когда когдаавтомобиль-препятствие автомобиль-препятствиеуже ужененеограничивал ограничивал переходим к квадратному уравнению вида Полученное значение удаления (S59 уд) автомобиля, совершившего наезд, от места наезда в момент, когда автомобиль-препятствие уже не ограничивал — 79 — 5959 59 � � �� �� �П ��� ��П� ��� �уд ��� � � � � �� � � , �� ��� �уд ��� ��� . (4.84) (4.86) S − Р ∙ Sуд − Q = 0, � � Здесь S'П = (Sa1 − Sуд) П ; Δ'х = Sa2 − S'a2; Sa2 = (Sa1 − Sуд) ��. ��� ��� где Р и Q – коэффициенты, зависящие от параметров, входящих � в уравнение �П � �� (4.79). � �� � ���� � �уд � П ∆� � �� ��� � �вида . (4.85) �� � При проведении решение �уд � �� анализа этого �уд �� �� наезда � ��� �� используем � ��� ��� ��� ��� уравнения (4.86) вида 2 уд � Sуд = � � � �� � (4.87) (4.87) � �. Полученное значение удаления (Sуд) автомобиля, совершившего совершившего наезд, от Полученное значение удаления (Sуд) автомобиля, наезд, от места наезда в момент, когда автомобиль-препятствие уже места наезда в момент, когда автомобиль-препятствие уже не ограничивал не ограничивал видимость пешехода, сравниваем с остановочным путем SО автомобиля, порядок определения которого приведен выше. Сравнением значений SО и Sуд 59 определяем наличие технической возможности у водителя автомобиля в данных условиях предотвратить наезд на пешехода путем торможения с момента, когда автомобиль-препятствие уже не ограничивал видимости пешехода. В случае наезда автомобиля боковой стороной уравнение (4.79) примет вид �П � �� � ���� � �� � �уд � �П ��� ∆� � �� (4.88) (4.88) �� �� где lх – расстояние от передней части до места удара. = автомобиля , �� �� Дальнейшие расчеты выполняются в приведенной выше после�П ��� ��� ∆� ��� довательности. � �, (4.89) �уд � �� � �уд ��� ���� ��� �уд ��� ��� ��� ����� � �� � �уд ��� �∆� � ��� � �� , ��� 4.5.2. Наезд на пешеходаSпри обзорности, ограниченной a2 = S' П �П движущимся во встречном направлении препятствием � (4.90) SП = Sуд Пв. условиях ограничения об- (4.91) При анализе наезда на пешехода ��� зорности встречным ТС (рис. 15) необходимые для исследования � обстоятельств наезда расчетные зависимости получим из рассмо�П � �� � ���� � �� � �уд � П а) ∆� � �� ��� � , которого (4.88) трения подобия треугольников АСD 15, б), из � ��� ����и ABE (рис. � П �уд �уд ��� � �� � �� � ��� � �I' �П � �� � ���� � �������уд � � ��� ��� ∆� � ��� ��� � следует отношение � ������� , (4.88) ��� �уд � �� VП �уд ��� ���� � �� �� � ��� � �� ��� �� �� = , �� �� I �� Va2�� =�на �П �� ��, ∆� �� � или с подстановкой указанных параметров �� �� �рисунке � , ∆x (4.89) ay �уд ��� �уд ��� �∆�� �П ��� ��� ∆� ��� (4.89) (4.89) Va1��� � ��уд������∆��, Sa2 = S'П (4.90) I •А �уд �П ��� Sa1 Sa2 = S'П �П (4.90) �П = S80 . (4.91) SП — уд — ��� ax �П (4.91) SП = Sуд . ��� б) а) �П � �х ��=��� �х�� �� � � �–уд ∆ +�� где а2�;���S� а2 � ��ПП∆' � �� �П ��S� удпуть, �� ��� �уд ��� �∆�� �уд ��� пройденный автомобилем № 2 из положения I в � ��� ∆∆�� � � � ���� ,, ��� ���� ���� �� и� определяемый � ��� из� �зависимости ���� � � � �(4.90); �(рис. положение ��уд II ���� 4.13) уд � �уд уд SП – ����� ��� ���� � � ��� �� � ��� ��� �� � �� ��� (4.88) (4.88) пройденный пешеходом путь с момента входа в зону обзорности до№момента ∆х′ = ∆х + Sа2; Sа2 – путь, пройденный автомобилем 2 из погде �� �� �� �� = , = , наезда, определяемый по формуле (4.91): �� �� ложения I в положение II (рис. и определяемый из зависимости �� 15)�� � �� �� �� ��ППS�� ∆∆���� � =�� S'П�� �� путь (4.90)об(4.90); SП – пройденный пешеходом с момента входа в зону �� a2 � �� � (4.89) П ,, (4.89) �уд ���� �уд �����∆ �∆���� � �� � �� уд уд зорности до момента наезда, определяемый по формуле (4.91): �П SП = Sуд . (4.91) ���� �� ; = S' S'ПП ��� SSa2 a2 = � (4.90)(4.90) (4.90) �ПП (4.90), (4.91) и (4.89) получим Из совместного решения уравнений �ППот места наезда в момент появления � зависимость для определения удаления ТС SSПП == SSуд уд .. � �� неограниченной обзорности пешехода Sуд�,�� описываемое уравнением (4.92). а) а) а) aayy I II •А •А •А Va1 VП I Va2 ay I' II Va2 V a2 I'I' VПП V ∆x ∆xx ∆ Sa1 Va1 axV a1 SSб)a1 a1 aaxx VП Va2 ∆ б) б) II Va2 V a2 II A В VПП V ly Е II II Sуд S'П II' С ∆y Va1 (4.91) (4.91)(4.91) SП S'ПП S' II' С С ×D III'II' III В В SSПП l lyy Рис. 15. Схема наезда ТС на пешехода при обзорности, ограниченной встречным ТС: а – положение ТС и пешехода в момент начала V Е ×D III' движения Va1 Е ×D III' a1 II части; A III II A III пешехода по проезжей б – положение ТС и пешехода в момент 86 SSуд появления неограниченной обзорности; I, II, III – положение ТС; уд I′, II′, III′ – положение пешехода (× – место удара) Из совместного уравнений (4.91) ограниченной и (4.89) поРис. 4.13. 4.13. Схема наезда наездарешения ТС на на пешехода пешехода при(4.90), обзорности, Рис. Схема ТС при обзорности, ограниченной лучим зависимость для определения удаления ТС от места наезда встречным ТС: ТС: аа –– положение положение ТС ТС ии пешехода пешехода вв момент момент начала начала движения движения встречным в момент появления неограниченной обзорности пешехода Sуд, опипешехода по проезжей части; части; положение ТС ТС ии пешехода пешехода вв момент момент пешехода проезжей сываемоепо уравнением (4.92).бб –– положение � ��� ��� ��� ТС; появления неограниченной неограниченной обзорности; II,∆III III –– положение положение ТС; I', I', II', II', III' III' –– появления обзорности; I,I, II, �уд �� � �� � ��∆�� � � � ��� � ∆� � �∆��� � � � �уд � ��� �� П П (4.92) � , (4.92) � положение пешехода (× (× –– место место удара) ∆� � �пешехода положение �уд Пудара) � ∆� � �� � � �� где – расстояние от границы проезжей части до полосы движения 85 85 автомобиля, совершившего наезд. — 81 — Уравнение (4.92) для рассмотрения наезда ТС на пешехода боковой �уд �� � ��� � ��∆��� � ∆� � �� �П ��� � ∆� � ∆� �∆��� � � �уд П ��� � �уд �П ��� � ∆� � �� , (4.92) где – расстояние от границы проезжей части до полосы движения где Δ – расстояние от границы проезжей части до полосы движения автомобиля, совершившего наезд. автомобиля, совершившего наезд. Уравнение (4.92) (4.92) для рассмотрения наезда ТСТСнанапешехода боковой Уравнение для рассмотрения наезда пешехода бокочастью приобретает вой частью вид приобретает вид �уд �� � ��� � � �� ��� � ∆� � ��� � ∆� � �� �� ��� � ∆ � �П � ∆ �П ∆� � ��� � � ��уд � �� � ��уд � �� � �П ��� � ∆� � � ��� . (4.93) (4.93) Дальнейшее исследование проводится аналогично изложенным Дальнейшее исследование проводится аналогично изложенным выше выше методикам, т. е. сравнением значения удаления до места наезметодикам, т. е. сравнением значения удаления до места наезда Sуд с да Sуд с остановочным путем SО, на основании чего делается вывод о чего делается вывод о наличии или остановочным путем SО, на основании наличии или отсутствии у водителя технической возможности избеотсутствии водителя жатьу наезда путемтехнической торможения.возможности избежать наезда путем торможения. 4.6. Исследование наезда на пешехода при ограниченной видимости или в темное время суток 4.6. Исследование наезда на пешехода при ограниченной видимости или в Особенность методики исследования наличия у водителя технитемное время суток ческой возможности предотвратить наезд на пешехода в условиях Особенность методики исследования наличия у водителя технической ограниченной видимости состоит в необходимости учета условий не возможности предотвратить наезддороги на пешехода в условиях только общей видимости и различных объектов вограниченной зоне происшествия рабочего места учета водителя, но также и конкретной видивидимости состоит вснеобходимости условий не только общей видимости мости пешехода. дороги и различных объектов в зоне происшествия с рабочего места водителя, Экспертная практика анализа данного типа наездов ТС на пено также шехода и конкретной видимости пешехода.учитывать как расстояние видипоказала, что необходимо мости дороги SВ, таканализа и расстояние SВ′,типа с которого можно различить Экспертная практика данного наездов ТС на пешехода конкретное препятствие. показала, что необходимо учитывать как расстояние видимости дороги SВ, так и Величина видимости дороги в основном зависит от типа и сорасстояние, с которого можнопокрытия, различить конкретное препятствие S'В. стояния дорожного атмосферных и метеорологических условий, технического состоянии автомобиля (фар, лобового стекВеличина видимости дороги в основном зависит от типа и состояния ла, стеклоочистителей), скорости движения ТС и субъективных кадорожного покрытия, атмосферных и метеорологических условий, техничесчеств водителя. кого состоянии автомобиля (фар, лобового стекла, стеклоочистителей), Видимость препятствия Sпр (или SB′) кроме указанных выше скорости факторов движения зависит ТС и субъективных качеств водителя. также от характеристик предмета: его размеров, формы, степени контрастности по отношению к окружающей среде, степени освещенности, направления и скорости его движения. Применительно к наезду на 86 пешехода величина конкретной — 82 — видимости зависит от цвета его одежды и наличия световозвращающих элементов, роста, перемещался ли он по проезжей части или был неподвижным. Поскольку величина видимости пешехода – многофакторное свойство, установить ее значение в каждом конкретном случае можно лишь на основе следственного эксперимента. При проведении экспертного исследования наезда ТС на пешехода в условиях ограниченной видимости для определения наличия технической возможности у водителя предотвратить наезд на пешехода кроме указанных в п. 4.1.3 эксперту должны быть представлены следующие дополнительные исходные данные: • расстояние видимости дороги с рабочего места водителя при движении ТС; • расстояние, с которого водитель мог различить (обнаружить) пешехода. Допустимую скорость движения ТС, соответствующую видимости дороги SB, определяют расчетным путем по формуле (3.20). Если наезд совершен на пешехода, двигавшегося во встречном или попутном направлении, то вопрос следует решать в соответствии с методикой, изложенной в п. 4.3. Экспертное исследование наезда на пешехода, двигавшегося в условиях ограниченной видимости в поперечном направлении по отношению к ТС, проводится в следующей последовательности: –– определяется удаление транспортного средства Sуд от места наезда в заданный следователем или судом момент времени (например, в момент начала движения пешехода по проезжей части или в момент появления пешехода в пучке света фар); –– определяется остановочный путь SО при скорости, соответствующей условиям видимости дороги; –– проводится сравнение значений Sуд и SО. Если Sуд > SО, делается вывод о наличии у водителя технической возможности предотвратить наезд путем экстренного торможения, но при условии, что пешеход был виден водителю в заданный момент времени. Если водитель не мог видеть пешехода в начальный момент времени, необходимо исследовать вопрос с момента наступления его — 83 — конкретной видимости. Если окажется, что расстояние конкретной видимости S′ пешехода окажется больше величины остановочного пути SО, делается вывод о наличии у водителя технической возможности предотвратить наезд путем торможения. Если же видимость пешехода будет меньше остановочного пути, т. е. SB′ < SО, вывод будет противоположным. Контрольные вопросы 1. В чём состоят особенности исследования наезда автомобиля на пешехода в условиях неограниченной видимости? 2. В чём состоят особенности решения вопроса о технической возможности предотвращения наезда на пешехода при обзорности, ограниченной неподвижным препятствием? 3. Каков алгоритм проведения исследования наезда при попутном и встречном движении транспортного средства и пешехода? 4. В чём состоят особенности решения вопроса о технической возможности предотвращения наезда на пешехода при обзорности, ограниченной подвижным препятствием? 5. Каков алгоритм проведения исследования наезда при движении транспортного средства и пешехода при ограниченной видимости или в темное время суток? — 84 — 5. ПРИМЕРЫ ЭКСПЕРТНОГО ИССЛЕДОВАНИЯ ДТП 5.1. Исследование наезда транспортного средства на пешехода при неограниченной видимости и обзорности Основанием для проведения экспертного исследования является постановление следователя СУ при Управлении МВД России по г. Тольятти капитана полиции Петрова П.П.* от 01 марта 2017 года о назначении автотехнической экспертизы по материалам уголовного дела № 201/2017. ПОСТАНОВЛЕНИЕ о назначении автотехнической экспертизы г. Тольятти 01 марта 2017 г. Следователь СУ при Управлении МВД России по г. Тольятти капитан полиции Петров П.П., рассмотрев материалы уголовного дела № 201/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ, УСТАНОВИЛ: 10 февраля 2017 г. в 14 ч 00 мин при следовании по ул. Центральной со стороны ул. Победы в направлении ул. Свободы г. Тольятти водитель Павлов А.А., управляя автомобилем ВАЗ-2110, совершил наезд на пешехода Коваля М.А., причинив ему тяжкие телесные повреждения. Автомобиль ВАЗ-2110 с полной нагрузкой двигался во втором ряду на расстоянии около 3 метров от правого края проезжей части со скоростью около 60 км/ч. Дорожные условия на момент ДТП: сухой асфальт; профиль дороги горизонтальный; ширина проезжей части 14 метров; движение двустороннее. Ограничение скорости 60 км/ч. На месте ДТП имеется двойной след торможения длиной 17 метров. Видимость в направлении движения ТС более 300 метров; обзорность с места водителя по направлению движения пешехода не ограничена. Наезд произошел серединой передней части ТС в процессе его торможения на расстоянии 12,2 метра от начала сле∗ Здесь и далее фамилии и ситуации, использованные в документах, являются вымышленными. — 85 — да юза. Место наезда на пешехода находится на расстоянии 4 метра от правого края проезжей части дороги. Пешеход – мужчина в возрасте 40 лет пересекал проезжую часть по нерегулируемому пешеходному переходу в поперечном направлении справа налево по ходу движения автомобиля в темпе быстрого шага; скорость движения принять 7,2 км/ч. Опасная ситуация для движения водителя возникла в момент выхода пешехода на проезжую часть дороги. На основании изложенного и руководствуясь ст. 195 (196) и 199 УПК РФ, ПОСТАНОВИЛ: 1. Назначить по настоящему делу автотехническую экспертизу, производство которой поручить ЭКЦ ГУ МВД России по Самарской области в лице эксперта Сидорова С.С. 2. На разрешение эксперта поставить следующие вопросы: 1) с какой скоростью двигалось ТС, исходя из длины тормозного следа; 2) на каком удалении от места наезда на пешехода находилось ТС в момент выхода пешехода на проезжую часть; 3) имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения при расчетной скорости движения; 4) имел ли водитель техническую возможность избежать наезда на пешехода путем маневра объезда пешехода при расчетной скорости движения; 5) имел ли водитель ТС техническую возможность избежать наезда на пешехода, не применяя торможение; 6) какими пунктами ПДД РФ должны были руководствоваться участники ДТП и противоречат ли их действия требованиям ПДД РФ? 3. Руководителю ЭКЦ разъяснить эксперту права и обязанности по ст. 57 УПК РФ и предупредить его об уголовной ответственности по ст. 307 УК РФ. Следователь _____________________________ Петров П.П. — 86 — ЗАКЛЮЧЕНИЕ ЭКСПЕРТА по уголовному делу № 201/2017 о наезде автомобиля ВАЗ-2110 под управлением Павлова А.А. на пешехода г. Тольятти 24 марта 2017 г. ВВОДНАЯ ЧАСТЬ 01 марта 2017 г. в ЭКЦ ГУ МВД России по Самарской области при постановлении следователя, капитана полиции Петрова П.П. о назначении автотехнической экспертизы поступили материалы уголовного дела № 201/2017 о наезде автомобиля ВАЗ-2110 под управлением Павлова А.А. на пешехода Коваля М.А. На разрешение эксперта поставлены следующие вопросы: 1. С какой скоростью двигалось ТС, исходя из длины тормозного следа? 2. На каком удалении от места наезда на пешехода находилось ТС в момент выхода пешехода на проезжую часть? 3. Имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения при расчетной скорости движения? 4. Имел ли водитель ТС техническую возможность избежать наезда на пешехода, не применяя торможение? 5. Имел ли водитель техническую возможность избежать наезда на пешехода путем маневра объезда пешехода при расчетной скорости движения? 6. Какими пунктами ПДД РФ должны были руководствоваться участники ДТП и противоречат ли их действия требованиям ПДД РФ? Проведение экспертизы поручено эксперту Сидорову С.С., имеющему среднее профессиональное автотехническое образование. ПОДПИСКА Мне, эксперту Сидорову С.С., разъяснены права и обязанности эксперта, предусмотренные ст. 57 УПК РФ. Об уголовной ответственности за дачу заведомо ложного заключения по ст. 307 УК РФ предупрежден. Эксперт ______________ Сидоров С.С. — 87 — ИСХОДНЫЕ ДАННЫЕ К ЭКСПЕРТНОМУ ИССЛЕДОВАНИЮ ДТП 1. Обстоятельства ДТП: 10 февраля 2017 г. в 14 час 00 мин при следовании по ул. Центральной со стороны ул. Победы в направлении ул. Свободы г. Тольятти водитель Павлов А.А., управляя автомобилем ВАЗ-2110, совершил наезд на пешехода Коваля М.А., причинив ему тяжкие телесные повреждения. 2. Дорожные условия: состояние дорожного покрытия – сухой асфальт; нерегулируемый пешеходный переход; количество полос – четыре полосы; ширина проезжей части 14 м; наличие дорожных знаков – установлены дорожные знаки пешеходного перехода. 3. Наличие следов транспортного средства: имеется тормозной след длиной 17 м; после наезда автомобиль продвинулся на расстояние 8,0 м. 4. Расположение места наезда на пешехода: место наезда расположено на расстоянии 4 метра от правого края проезжей части по ходу движения ТС и на расстоянии 12,2 метра от начала тормозного следа. 5. Условия видимости: видимость в направлении движения 300 метров. 6. Скорость движения транспорта: скорость движения автомобиля составляла около 60 км/ч. 7. Степень загруженности транспорта: автомобиль с полной нагрузкой. 8. Техническое состояние транспорта: автомобиль технически исправен. 9. Возраст и пол пешехода: пешеход – мужчина в возрасте 40 лет. 10. Направление движения пешехода по отношению к ТС (справа, слева, попутное, встречное): пешеход пересекал проезжую часть в поперечном направлении справа налево по ходу движения автомобиля. 11. Темп движения и (или) скорость движения пешехода: пешеход двигался в темпе быстрого шага; скорость движения принять 7,2 км/ч. 12. Расстояние от препятствия, ограничивающего обзорность с места водителя, до пешехода, вышедшего на проезжую часть: препятствие, ограничивающее обзорность, отсутствовало. 13. Боковой интервал между ТС, совершившим наезд, и препятствием, ограничивающим обзорность с места водителя: препятствие, ограничивающее обзорность, отсутствовало. — 88 — 14. Условия обзорности пешехода с места водителя (неограниченная, ограниченная условиями видимости, неподвижным объектом, попутным или встречным): обзорность с места водителя и видимость в направлении движения не ограничены. 15. Какой частью ТС произошел наезд на пешехода (передней частью, боковой частью): наезд совершен серединой передней части автомобиля. 16. На каком расстоянии от передней (при наезде боковой частью) или от боковой (при наезде передней частью) находится точка контакта с пешеходом: посередине передней части автомобиля. 17. Какой момент принять за момент возникновения опасности для движения водителя: за момент возникновения опасности для движения водителя принять момент выхода пешехода на проезжую часть. 18. Схема ДТП приведена на рисунке. 2 Sю = 17 м 12,2 м 14 м ×3 5 SП = 4 м VП 1 Sпн = 8,0 м Ул. Свободы Ул. Победы ул. Центральная Рисунок. Схема ДТП с наездом на пешехода: 1 – ВАЗ-2110; Рис. 1. Схема ДТП с наездом на пешехода: – ВАЗ-2110; 2 – направление 2 – направление движения ТС; 31(×) – место наезда; 4 – направление движения 5 – тормозные следы 5 – движения ТС; 3 × – место наезда; 4пешехода; – направление движения пешехода; тормозные следы ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА 1. Иларионов, В.А. Экспертиза дорожно-транспортных происшествий : учебник дляЛИТЕРАТУРА вузов / В.А. Иларионов. – М. : Транспорт, ИСПОЛЬЗУЕМАЯ 2013. – 255 с. 1. Иларионов, В.А. Экспертиза дорожно-транспортных происшествий : 2. Суворов, Ю.Б. Судебная дорожно-транспортная экспертиза. Суучебник для вузов / В.А. Иларионов. – М. : Транспорт, 2013. – 255 с. дебно-экспертная оценка действий водителей и других лиц, от2. Суворов, Ю.Б. Судебная дорожно-транспортная экспертиза. Судебноветственных за обеспечение безопасности дорожного движения, оценка действийпособие водителей/ Ю.Б. и других лиц, ответственных за на экспертная участках ДТП : учебное Суворов. – М. : Экзаменобеспечение : Право и закон, 2004. –дорожного 208 с. безопасности движения, на участках ДТП : 3. Домке, Э.Р. Расследование и экспертиза дорожно-транспортных учебное пособие / Ю.Б. Суворов. – М. : Экзамен : Право и закон, 2004. – происшествий : учебник для студ. высш. учеб. заведений / Э.Р. Дом208 с. ке. – 2-е изд., стер. – М. : Академия, 2012. – 288 с. 3. Домке, Э.Р. Расследование и экспертиза дорожно-транспортных 89 высш. — учеб. заведений / Э.Р. Домке. – происшествий : учебник для — студ. 2-е изд., стер. – М. : Академия, 2012. – 288 с. 4. Инструкция по организации производства судебных экспертиз в государственных судебно-экспертных учреждениях системы Министерства юстиции Российской Федерации. Утверждена Приказом Министерства юстиции Российской Федерации от 20 декабря 2002 № 347. – URL: ceur.ru/library/docs/departmental_ requlations/item 132780. ИССЛЕДОВАНИЕ По 1-му вопросу 1.1. Скорость движения автомобиля ВАЗ-2110 определим по формуле Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , (1) (1) где JаV–=установившееся = 6,8 м/с (табл. В.2); t – а 4,3 + 54,8 = 59,1 км/ч. 3 1,8 ∙ 6,8 ∙ 0,35 + замедление, √26 ∙ 6,8 ∙ 17J= a время нарастания замедления до установившегося значения, t3 = 0,35 � �П �а = � ���следа, �= ,17 м (см. рис.). (2) Sуд тормозного с (табл. Б.3); Sю – длина ю � ��Sпн ю �П ∙ t3 + �26�ва формулу �ю , (1) a = 1,8 ∙ Jaзначений При подстановкеVпринятых (1) имеем � � ∙ ��,� S = � �√17 � √8� = 32,8 − 2,8 = 31,1 м. Va = 1,8уд∙ 6,8�,� ∙ 0,35 + √26 ∙ 6,8 ∙ 17 = 4,3 + 54,8 = 59,1 км/ч. 2 �а �а�� перед торможением � �а 1.2. Из расчетногоSо исследования следует, + 0,5t ) �� �пнчто (3) 3� �t2 ��� � а,, (2) Sуд = (tП1 + ю �,� ��� �П ВАЗ-2110 двигался со скоростью около 59,1 км/ч. ��,� ��,�� � � ∙ ��,� 0,1Sуд +вопросу 0,5 + � √8�= = 17,6 +− 19,8 SО = (0,8 = ∙ 0,35) � �√17 32,8 2,8==37,4 31,1м. м. По+2-му �,� �,� �� ∙ �,� (4) 2.1. Удаление автомобиля ВАЗ-2110 от места наезда в момент �a =�1,8 26 �= ∙ Ja∙ ∙6,8 t +∙ 8,0 � �, � (1) �26� а а37,6 VН = �26�а �VSо (5) пн t2 + 30,5t � ю а км/ч. ,используя заданные (3) = (t√1 + часть 3) выхода пешехода на проезжую определим, �,� ���а �авыражения �� Va = 1,8 исходные ∙ 6,8 ∙ 0,35данные + √26 ∙с6,8 ∙ 17 = 4,3 +Н� 54,8 = 59,1 км/ч. и принятые � = t1 +��,� tпомощью = (6) Т'д.н ��,� 2 + 0,5t + �,�� а � = 37,4 м. = 17,6 + 19,8 (4) SО = (0,8 + 0,1 + 0,5 ∙ 0,35) � +� �,� П а�� ∙ �,� � ���ю � ��пн � , Sуд = ��,����,� (2)(2) = 0,8 + 0,1 + 0,5 ∙ 0,35 +�П = 1,075 + 0,88 = 1,95 с. � �,� ∙∙ �,� VН = �26�а �пн � √26 6,8�∙ 8,0 = 37,6 км/ч. (5) � ∙ ��,� пройденное пешеходом где SП – расстояние, от края проезжей чаSуд = � �√17 = 31,1 м. �П � √8� = �,�32,8 − 2,8 � �,� SS'П==4,0 м �а �� =рис.+1,95 м. (7) сти до места наезда, 1); V=НП 3,9 – скорость движения (6) t1 ∙∙+JТ'(см. ta2д.н = Т' �,� ∙+t30,5t +�,� (1) VПaд.н= =1,8 �26� а �аю�, �,�� �а � пешехода, VП = 7,2 км/ч; –+ расчетная �,�� t2�а+ 0,5t3) скорость � а , движения автомо-(3) Sо = V(tа1��,����,� ∆ = S − = 4,0 − = 3,16 м. �,� ��� y П а V = 1,8 ∙ 6,8 ∙ 0,35 + 26 ∙ 6,8 ∙ 17 = 4,3 54,8 =1,95 59,1с.км/ч.авто- (8) a + 0,1 + V биля = 59,1 √ км/ч;�Sпн –= расстояние, пройденное � ++0,88 = ВАЗ-2110, 0,8 0,5 1,075 = а ∙ 0,35 + �,� ∙ �,� � ��,�наезда, �рис.). � а��,� S = 8 м (см.��,� после (0,8 + 0,1ВАЗ-2110 + 0,5 =пн 17,6 + 19,8 м. м, (4) SО =мобилем ∆Б∙ =0,35) 0,005 La��+ПП�а�� =�∙ �,� 0,005 4,265 ∙ � =, 37,4 = 0,35 (10) �,� ��� (2) Sуд�,�= �� ю∙ � пн �,� �,� = ∙ Т' = 1,95 = 3,9 м. (7) S' � П д.н П При подстановке принятых исходных данных в формулу (2) имеем �,� �,� � � �уд26 а∙ 6,8∆� � ∙ ��,� VН = �26� ∙��∆ 8,0Б. =�,�� 37,6 км/ч. (5) √ �� а �пн �√8� (11) а� Sуд = �y �√17 � 32,8 −=2,8 31,1 м. ∆ = S − = 4,0 3,16= м. (8) �П= − П�а �,� � � �� а ��Н � +�а��,� ���,� = Т'� = t�1а+ t2 + 0,5tследует, 2.2. Из что вм.момент выхода(6) ∆Б расчетного = 0,005 LaSод.наисследования = 0,005 ∙ 4,265 + 0,5t∙34,265 ) ∙ �,�� �а∙= а0,35 , = 0,35 м, (3) ∆Б = 0,005 (10) 1 +=t20,005 �,�=La(t�,� �,� �,� ВАЗ-2110 ��� �,� а пешехода на проезжую часть автомобиль от места наезда ��,����,� � �,�� = 0,8 + 0,1 расстоянии + 0,5=∙S0,35 +�около = метра. 1,075 + м. 0,88 = 1,95 с. а �� ��,� ��,� уд а∙ �,� � �∆ Б =�,� 4,0 −� ∆= =. 3,16 П− �31,1 (11) (0,8 + 0,1 на + 0,5∆y∙ 0,35) + 19,8 = 37,4 м. (4) SО =находился � + � 17,6 �,�� �а�� ∙ �,� ��,� П П Т'д.н90 = —�1,95 = 3,9 м. (7) �,16 0,�5 �1,1S'� �,265∙ — П= ��,� ��а �,�26� ; 0,35 ∙ 6,8 ∙�,� 8,0∙ = 37,6 км/ч.м. (5) �26�L ∆VБН==0,005 = 0,005 ∙ 4,265 = √ а� a пн � 7,2�,�� 59,1 �,� �,� �а ∆y =�SП − = �,�� 4,0 − �а �� =Н�3,16 м. (8) = (6) Т' =а t +�t + 0,5t �� �+ �� (1) Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , По 3-му вопросу у водителя автомобиля технической возVa 3.1. = 1,8Наличие ∙ 6,8 ∙ 0,35 + √26 ∙ 6,8 ∙ 17 = 4,3 ВАЗ-2110 + 54,8 = 59,1 км/ч. можности предотвратить наезд на пешехода путем экстренного тор� �П �а � ���ю � ��пн �автомобиля , Sуд =сравнивая можения исследуем, удаление ВАЗ-2110(2) от �П места наезда� в∙ ��,� момент выхода пешехода на проезжую часть Sуд с оста� Sуд = � �√17 � √8� = 32,8 − 2,8 = 31,1 м. �,� SО, который может быть определен по формуле новочным путем � �� а а SоО = (t1 + t2 V+a 0,5t S 3) ∙ J� = 1,8 t3 +а, �26�а �ю , �,� a ∙ ��� (3) (3) где t1 – время реакции водителя, t126 = ∙0,8 с;∙ 17 t2 –=время срабатывания = 1,8��,� ∙ 6,8 4,3м.+ 54,8 = 59,1(4) км/ч. + 0,5V∙a0,35) + ∙ 0,35 += √ 17,6 +6,8 19,8 = 37,4 SО = (0,8 + 0,1 �� ∙ �,� �,� тормозов, t2 = 0,1 с; t3 – время нарастания замедления, t�3 = 0,35 с; Vа – �П �а =∙ 8,0 � ���км/ч. Sудавтомобиля � движения ю � ��пн �V , = 59,1 км/ч; расчетная VН = скорость � √26 ∙ 6,8 (5) �П = 37,6ВАЗ-2110, �26�а �пн а 2 Jа – установившееся замедление, J = 6,8 м/с . � � а � ∙ ��,� � ��Н Sудд.н==принятых = 32,8 −в 2,8 = 31,1 м.(6) t1�,�+ t2�+�√17 0,5t +�а√8� = Т' При подстановке исходных данных выражение (3) �,��а � получаем значение остановочного пути при �расчетной скорости � ��,����,� 0,5t3)= а1,95 � с.а , Sо ==(t1,075 = 0,8 + 0,1 автомобиля + 0,5 ∙ 0,35 +ВАЗ-2110: 1 + t2 + 0,88 движения �,� ���а �,� ∙ �,� ��,�� � �,� ��,� ��,�� (4) = П∙ 0,35) ∙ Т'д.н = +1,95 = 3,9 м. + 19,8 = 37,4 м. (7) = 17,6 SО = (0,8 + 0,1S'+П 0,5 �,� �,� �,� �� ∙ �,� � � �,�� S = 37,4 м и удаления Из сравнения пути О SП − а �а пн = 4,0 = 3,16 (8) V∆Нy остановочного == �26� � √−26 ∙ 6,8 ∙ 8,0м.= 37,6 км/ч. � автомобиля ВАЗ-2110 от места наезда�в момент выхода пешехода на ��,� ∙ Ja ∙ t3 +что � , �а ��Н� (1) Va =�а 1,8 �26� проезжую ∆ часть Sуд =L31,1 м > юS=уд+.0,35 = следует, 0,005 ∙Оа0,5t м,= (10) + Т' Б = 0,005 a д.н =∙ t4,265 1 + t2 S �,� �,� �,�� а ∙ t + �26� �ю можно , (1) Va = 1,8 ∙ Jaисследования 3.2. Va =На 1,8основании ∙ 6,8 ∙ 0,35�расчетного +√ 26 ∙∆6,8 ∙ 173 = 4,3 +а54,8 = 59,1сделать км/ч. выуд ��а � �∆Б��,����,� = 1,8 0,8 ∙+6,8 0,1 + 0,5+∙ � 0,35 = 1,075 автомобиля + 0,88 = 1,95 с. . ∙ 17водитель (11) вод, чтоVвa = данной дорожной обстановке ВАЗ∙ 0,35 26�П∙+6,8 = 59,1 км/ч. �,� ∙ �,� = 4,3� + 54,8 �а �П �√ а = � ��� � � , S �� уд ю пн 2110 не располагал�технической наезд(2) �П � � возможностью � �,� предотвратить а П а �П ��,� = ∙ Т' = 1,95 = 3,9 м. S' ∆ = 0,005 L = 0,005 ∙ 4,265 ∙ = 0,35 м. = � ��� � � , (2) S П д.н ��пн Б a экстренного уд на пешехода путем �,� �,� �,� �П торможения. � �,�ю � ∙ ��,� Sуд = � �√17 � √8� = �32,8технической − 2,8�,�� = 31,1 возможности м. 3.3. Проведем исследование наличия �,�� �а �,�� �а ∙ ��,� ∆ = S − = 4,0 − = 3,16 м. ∆yS= S − = 4,0 − = 3,16 м. y П П = � �√17 � = 32,8 − 2,8 = 31,1 м. √8� уд � � у водителя предотвратить наезд�своевременным �,�� �а �а� применением тор) � , (3) Sо = (t1 + t2 + 0,5t 3 ��,� �,� � ��� �,16 ��а0,�5 �1,1 � �,265 можения. а �а� ∙ ∆Б = 0,005 L = 0,005 = 0,35 м, а ∙ 4,265 a + 0,5t;3) � , �,� (3) Sо � = (t1 +� t2�,� �,� ��� 59,1 ��,�в момент Скорость автомобиля им а линии следова��,� 7,2пересечения + =��� 17,6 + 19,8 = 37,4 м. (4) SО = (0,8 + 0,1 + 0,5 ∙ 0,35) �уд ∆ �∆ а � Б �,� ��,��� ∙ �,� � . ния пешехода ��,� ��а���а� = 17,6�П+ 19,8 = 37,4 м. + (4) SО = (0,8 + 0,1 + 0,5 ∙ 0,35) КM ��� ∙ �,� , (12) XФ =�,� � ��∙�8,0 = 37,6 км/ч. VН = �26�а �пн � √26�а∙ 6,8 (5)(5) ��,� ∆Б = 0,005 = 0,005 ∙ 4,265 ∙ = 0,35 м. � La �,�26 VН = �26� ∙ 6,8 ∙ 8,0 = �37,6�,�км/ч. пешехода (5) �П автомобиля �,� до а �пн � √ Время Sдвижения линии следования �а �� Н = L = 4,265 ∙ = 0,52 м. (15) (6) доп а t2�+а 0,5t + �,�� = �а Т'д.н = t1 +��,� �,���а �� � а = 3,16 ∆y = S= = 4,0 − м. Н П− = (6) � t2 + 0,5t +� �а Т'д.н��,����,� ��,�t1 + �,�� а S = t = ∙ 0,8 = 13,1 м; (17) 1 1 = 0,8 + 0,1 + 0,5 ∙ 0,35 + �,�� �,265 = 1,075 + 0,88 = 1,95 с. (6) �,� �1,1 �,16 � 0,�5 �,���,����,� ∙ �,� �= 1,075 + 0,88; = 1,95 с. = 0,8 + 0,1 + 0,5�а∙ 0,35 + ��,� � �,� 7,2 �,� ∙ �,� 59,1 S2р = S'П t=2р =П ∙ Т'д.н ∙ 0,3 (18) (7) = = 4,9 1,95м,= 3,9 м. �,� �,� �,� �,� �П �,� � ��а �=� 3,9 м. 1,95 (7) S'П = � ∙ Т' д.н = �,�� , � �,� XФ = К�,� ∆y = SП − а = 4,0 − M =�� 3,16 м. (8) � � 91 � �,�� — � — ∆y =� SП�П− а = 4,0 −�,� ��,� = 3,16 м. (8) �= 0,52 м. Lа а95 = �4,265 ∙ SдопL= ∆Б = 0,005 =�а0,005 ∙ 4,265 ∙ = 0,35 м, (10) a ��,� �,� � а �,� ��,� (1) (2) (3) (4) (5) (6) (7) (8) (10) (11) (12) (15) � � � �� а ���� � ���� �� = +П+tТ' �++ � +, �а ��Н� = Sуд Н �� ��,� ��,� ю пн 0,5t =0,5t ++tа2 а+ + Н19,8 0,5t = = Т'Т'д.н д.н==t1t+ 1�П 2t2д.н =t117,6 = 37,4 SО = (0,8 + 0,1 + 0,5 ∙ 0,35) �,�� �,�� �,��а м. аа � ∙ ��,� �� ∙ �,� �,� (2) (6) (6) (4) � ��,����,� ��,����,� ��,����,� S= =0,5 �√17 �∙ 6,8 = 32,8 −0,88 2,8 31,1 м. = 1,95 с. (5) √8� �� + уд ==0,8 0,8++V 0,1 0,1 ++0,8 0,5+�,� ∙ ∙а0,35 0,1 0,5 +√26 ∙ 0,35 + ==∙1,075 1,075 +0,88 = 1,075 ===1,95 1,95 + 0,88 с.с. �0,35 8,0 = +37,6 км/ч. �26� пн+� �,� �,�∙ �,� ∙ �,� им �,�за ∙ �,� ПутьН пешехода, пройденный время Тд.н′, � � �� ��П �,� �П �,� �аа ��Н�,�а 0,5t ) д.н � ,м. = 3,9 м. (3) (7) 3+ ===П(t Т'д.н ∙1,95 1,95 Т' == =3,9 3,9 м. 1,95 (7) S'S'Т' S' t∙ 1∙Т' ++ tПtд.н ++=�,� 0,5t = (6) ПSо П= д.н 22 = ��� а �,� �,�1 �,� �,� �,��а�,� При указанных выше условиях (наезд серединой пе����,�� �,�� ��,�� произошел �,�� ��,� ��,����,� ∆ −и∆а yа= =4,0 S4,0 −1,075 − адо =+=+ 4,0 =19,8 3,16 3,16 − =м.= м. = 3,16 (8) (8) + 0,1 + 0,5 ∙ 0,35) 17,6 37,4 м.с. м. (4) SО = (0,8 = 0,8 + части 0,1 + 0,5 ∙ ∆0,35 +П−+ 0,88 1,95 y y==SS П П=− редней автомобиля ��� �∙пешеход �� � наезда� по проезжей части ∙ �,� �,� �,� �,� �� �а ��,� ��,� ��,� прошел путь = 4,0 автомобиль ВАЗ-2110 праа�Па �∆ =S=П0,005 0,005 LLметра) 0,005 =26 La= ∙�,� 4,265 =1,95 0,005 ∙ 3,9 ∙ 4,265 = =м. 0,35 0,35 ∙ двигался м,м, = 0,35отм,(10) (10) VН∆=∆Б Б�26� �пн � ∙д.н6,8 ∙∙4,265 8,0 = ∙37,6 км/ч. (5) a= √ ∙=0,005 Т'0,005 = (7) а S' П Бa= �,� �,� �,� �,� �,� �,� �,� на расстоянии �,� вого края проезжей части � �∆а �� �уд �уд �� �� �� ∆∆� �∆ �∆ НБ �уд Б Б а �,�� � �∆ аt �+ tа1 а� +�� 0,5t = (6) . −. + � = 3,16 . м. (11) (11) (8) д.нS= 2= 4,0 ∆Т' (8) y= П− �а�а � (6) �Па � �,�� �П�П�а (7) (8) (10) (11) Для безопасного полосы движения ���,����,� ��,� ��,�автомобиля пеше��а перехода ��,� ��,� = 0,8 + Lа a=�∙ а0,005 =∙∙1,075 +∙0,35 0,88 =0,35 1,95 ∆+Б =0,5 4,265 =м. м,с. м. (10) ∆∆Б Б+==0,1 ∆LБ0,005 0,005 0,005 La a=∙ а0,35 0,005 ==L0,005 ∙ 4,265 4,265 = 0,005 ∙ ∙ 4,265 = = 0,35 ∙ м. = 0,35 a0,005 �,� �,� �,� �,� ходом необходимо�,� выполнение �,� �,�∙ �,�условия �,� �,� �,� � ��� ∆а � �∆ ��,�� П′ > а ∆�,�� Б+ ∆ �,�� (9) Т' =B=4,0 1,95 == 3,93,16 м. м. (7) S'�П∆а�yа=S=уд4,0 ∆∆y y==SSПП−− 4,0 − −yд.н+ −Б.м.м. � .3,16 (11) ПS a=3,16 П∙ − � � �,� �� ��П�,� � �а Здесь ∆Б – безопасный боковой интервал между ТС и пешеходом, ��,16 �,�� � 0,�5 а ��0,�5 0,�5 �,16 �1,1 �1,1��∆��,265 �1,1 ��,16 �,265 а�,265 − = 4,0 −∙ ��,� = 3,16 м. (8) y= П� ∆Б = 0,005поLaформуле = S0,005 ∙ 4,265 определяемый � � � �; ;= 0,35 м.; �,� 7,2 �,� 7,2 59,1 59,1 59,1 7,2 �а �L �,�� ∙ 4,265 ∙ ��,� = 0,35 м, а ∆ = S0,005 = −0,005 (10) (10) a= 4,0 �� �= ∆Бy = П− �,� �� �� � 3,16 м. �� ��,� � X�XФФ==ККMM�� X�Фа а=�� К, M , � а �, (12) (12) �� ��� �� �автомобиля ∆�� уд ��а �,16 � �∆ Б0,�5 где Ba = 1,68 м �1,1 – ширина (прил. Е); La = 4,265(11) м � �,265 � � ВАЗ-2110 . �а ��П�,� �П ; � � �,� �,� П П – длина автомобиля ВАЗ-2110 (прил. Е). =4,265 4,265 = Lа ∙ ∙ = 4,265 =7,2 =0,52 0,52 ∙ м.м. = 0,52 м. (15) (15) SSдоп S= доп==LL а а59,1 доп �а�а�а �а��,� ��,� ��,� ��,� При∆Бподстановке в правую часть неравенства принятых значе= 0,005 La = 0,005 ∙ 4,265 ∙ = 0,35 м. � �,� � �,� �� ��,� ��,��а ��а ���,� , ∙ м; (12) �0,8 ний имеем SS1 1== а аtX1tФ1=S==1 К = M∙ ∙0,8 t1�� ==�13,1 13,1 0,8 м; = 13,1 м; (17) (17) �,� �,��а �,� �,��,��,�� �,� ∆∆yy = − + 1,68 = 3,16 м. = 5,19 м. + SBПa − + ∆�Б ==4,0 3,16 + 0,35 � ��,� ��,� ��,� ��,� �� а Па�а S = = t t = = = ∙ ∙ 0,3 t 0,3 = = 4,9 4,9 м, ∙ м, 0,3 = 4,9 м, (18) (18) = 4,265 ∙ = 0,52 м. (15) Sдоп S=S2рL 2р 2р 2р �,� �,� �,� + ∆ = 5,19 м следует, что ��,� Из сравнения ′�,� =2р3,9 м�,� и��,� ∆2рy � + 0,�5 B �,16 �1,1аS� Па �,265 a Б ; � � ��,� SП′ < ∆y + Ba + ∆Б. 59,1 S 1 = а t1 = ∙ 0,87,2 = 13,1 м; (17) �,� �,�указывает на то, что в данной ситуаНесоблюдение условия (9) ��а� �� � ��,� К , м, перехода полосы дви(12) ции отсутствовала безопасного 95M � S возможность = а Xt Ф ==95 ∙ 0,3 =95 4,9 (18) 2р �,� 2р �,� ��� жения автомобиля пешеходом. � �,� ∙ = 0,52 м. (15) Sдоп = Lа П = 4,265 3.4. Из проведенного исследования следует, что водитель авто�а ��,� мобиля ВАЗ-2110 не располагал � ��,� технической возможностью преS1 = аэкстренного t1 = 95 ∙ 0,8торможения. = 13,1 м; (17) дотвратить наезд путем �,� �,� В данной ситуации техническая возможность � отсутствовала ��,� S2р = а t2р = ∙ 0,3 = 4,9 м, (18) �,� �,� безопасного перехода полосы движения автомобиля пешеходом. По 4-му вопросу 4.1. Поскольку при экстренном торможении водитель автомо95 биля ВАЗ-2110 не имел технической возможности предотвратить наезд на пешехода, проведем проверку наличия у водителя возможности безопасного проезда без торможения. — 92 — (12) (15) (17) (18) � а� ю a a 3 � �� Т'д.н = t1 + t2 + 0,5t + а�а Н = �а� �,�� а + 54,8 Va = 1,8 ∙ 6,8 ∙ 0,35 ∙ 173)= 4,3 + 0,5t � , = 59,1 км/ч. Sо += √ (t26 1 + ∙t26,8 �,� (6) (3) ���а ��,����,� � 1,95 с. �П �а = 0,8 + 0,1 + 0,5 ∙ 0,35 + = 1,075 + 0,88 � = �,� � ��� � �� � ,= (2) Sуд��,� ∙ ��,� �,� ю пн + 0,1 + 0,5 ∙ 0,35) + = 17,6 + 19,8 м. тормо-(1) (4) SО =В(0,8 �П ∙ Ja ∙ t3 + = 1,8 этом исследованииVопределим, было �26�а �ю , =ли37,4 a�,� �� ∙ �,� необходимо �П �,� ∙ли Т'д.н = � 1,95 =проехать 3,9 м. мимо пеше- (7) S'Пи� =мог � ∙ ��,� зить в данной VaV=SНситуации 1,8 ∙ 6,8 ∙ 0,35 + √√26 ∙автомобиль 6,8 ∙�,� 17 4,3 + 59,1 км/ч. �,� � �√17 � ==32,8 − 54,8 2,8 == 31,1 м. √8� уд ==�26� � � 26 ∙ 6,8 ∙ 8,0 = 37,6 км/ч. (5) а пн �,� хода, не задев его, если бы водитель не тормозил, а продолжал бы � �,�� �П ��аа ∆y =SудSП= − �= ��� 4,0 ю−� �� 3,16 �Н��,а� м. (2)(8) �=�� движение с той же скоростью. ��а апн 0,5t3)+ = (6) Т'д.н= =(tt1�1П+�+tt22++0,5t � , (3) Sо �,��,��а���а �а ��,� скоростью мимо � Условие безопасного с постоянной � ∙ ��,� проезда ∆Sуд L��,� =� 0,005 4,265 0,35м.м, (10) = 0,005 � 32,8 −∙ 2,8 ==31,1 √8� Б= a�√17 � ∙= ��,����,� �,� �,�∙ 0,35 пешехода = 0,8 + 0,1 + 0,5 + + ��,� ==17,6 1,075 +�,�0,88 = 1,95 + 0,1 + 0,5 ∙ 0,35) + 19,8 = 37,4 м.с. (4) SО = (0,8 �,� ∙ �,� �,��∆ �,� �уд ��а �� ∙ ∆ �а �а� � Б Sо = (t (11)(3) .3)�,� � ���а, (11) �1 +�t2 + �0,5t�,� � =�а П26 = 3,9 м. (7) VН = �26�а �S' 6,8П=∙ �,� 8,01,95 = 37,6 км/ч. (5) √ ∙ Т'∙ д.н пнП � �,� ��,�� �а ��,�автомобиля ��,� Здесь S = 31,1 м – удаление ВАЗ-2110 от места наезда + 0,5L∙a0,35)= 0,005 + ∙�4,265 = 17,6 +�19,8 (4) SО =уд(0,8 � = 37,4 ∆Б+=0,1 0,005 ∙ �,�� =��0,35 м. м. �� ∙ а�,� �,� �,� ∆ −�,� =Нa3,16 м. м – длина (8) t1−+ �t2 =+ 4,0 0,5tчасть; + �а L = (6) Т'yд.н=на=SПпроезжую в момент выхода пешехода = 4,265 �,��а �� � 26 ∙ 6,8 �,�� V = � ∙ 8,0 = 37,6 км/ч. (5) �26� а √� − Н а пн автомобиля ВАЗ-2110; – =расстояние боковой по∆y = SП ∆− 4,0 =между 3,16 м.правой ��,� y а ��,����,� � L+ � = ∙1,075 ∆ = 0,005 = 0,005 4,265 0,35 м, – без- (10) � ∙ 0,88 = Б0,5 a = 0,8 + 0,1 + ∙ 0,35 + = 1,95 � �� верхностью автомобиля и правым проезжей �,��,� ∙ краем �,� части; ∆с. а Н �,� Б t2 + 0,5t + = (6) Т'д.н = t1 +�,16 � 0,�5 �1,1 � �,265 �,��а �� �� ТС∆�и�∆ опасный боковой интервал между пешеходом, определяемый уд Б �,� ; П� а (11) ∙ Т'� =� .1,95 = 3,9 м. (7) S'П = ���,����,� 59,1 П1,075 + 0,88 = 1,95 с. = 0,8 + 0,1 + 0,5 ∙ 0,35 +�,�а д.н 7,2 = �,� по формуле �,� ∙ �,� � � � ��,� �,�� �� а ��а�,� �П− ∆Б = 0,005 La∆S'yаПX ∙=4,265 ∙, = =3,9 = 3,16 0,35 м. ==ФS0,005 = К∙ Т' П � M д.н =4,0 − 1,95 м. м. �,� = �,� �,� � � �� �,�� � (12)(8) (7) ��,� �а а �а �,�� �,�� �,� В исходных данных указано, наезд ∆∆Б=y== =∙ 0,005 ∙−=4,265 ∙м.чтом.= 0,35 на м, пеше-(8) (10) S�постановления − 4,0 −= 4,0 3,16 aS= = 3,16 ПП∆ П− L0,005 =y =L 4,265 = 0,52 (15) Sдоп � �,� � а � � м. �,� � ��,� а хода произведен серединой передней части автомобиля ВАЗ-2110. �а а �,16 ��,� ∆� �∆� Б 0,�5 ��а�,265 ∆�1,1 0,005 L�aуд �� = 0,005 ∙ 4,265 ∙ наезда = 0,35 м, ��,� Б = условии, � . (11) При указанном выше что пешеход до прошел по(10) �,� �,� ; � S1 = t1 =�а ∙ 0,8�П= 13,1 м; (17) �,� �,� 7,2 59,1 � �� ∆ �∆ проезжей части путь SП =�4,0 метра, автомобиль ВАЗ-2110 двигался уд а � Б � . ��,� (11) �аа = 0,005 �а ��,�∙ 4,265 �П�� � �∙ ∆Б =проезжей 0,005 = 0,35 м. a части от правого края расстоянии S2рL= tX ∙ 0,3 4,9 м, (18) а= � 2р =на �,� �,� = К , (12) � �,� �,� Ф M � �� ��,� ∆Б = 0,005 La а �= 0,005 ∙ 4,265 �,�� ∙ � = 0,35 м. �,� а = 4,0 − �,� ∆ y = SП − = 3,16 м. �П � �,� � �,�� = 0,52 м. ∙ Sдоп∆ ==LSа − =�а4,265 =принятые 4,0 −�,16 3,16 м. ��,� = исходные Подставляем в неравенство данные: y П�а �1,1 � �,265 � � � 0,�5 ; � 95 � ��,� а � �1,1 � �,265 7,20,�5 S59,1 t1 = �,16 ∙ 0,8 = 13,1 м; 1= �,� 59,1 ��,� 7,2� �� � ; (15) (17) а � �а ��,� XФt2р= (12) M �∙ 0,3 � S2р = 0,6 =,4,9 м, (18) >=К 0,39. а �� �, �,�XФ = КM �,������ (12) ��� 4.2. Вывод: водитель автомобиля ВАЗ-2110 не избежал бы наезда �П �,� = L = 4,265 ∙ = 0,52 м. (15) S � �,� доп а П на пешехода, не применяя торможение. � ��,� = 0,52 м. (15) Sдоп = Lа а = 4,265 ∙ �а ��,� ��,� По 5-му вопросу S1 = ��аа t1 = ��,� 95 0,8==13,1 13,1м;м; S1 =�,� t1 = �,� ∙∙0,8 (17) (17) �,� 5.1. Исследуем наличие �,� у водителя технической возможности � ��,� SS2р2р== �аа путем tt2р = ��,� 0,3==4,9 4,9 избежать наезда на пешехода маневра объезда ∙∙0,3 м,м, пешехода при (18) (18) 2р = �,� �,� �,� �,� расчетной скорости движения. Определяем минимальное расстояние XФ, необходимое для перестроения вида «смена полосы движения» с поперечным смещени95 95 ем на величину YM: — 93 — ∆y� = SП − = 4,0 − � = 3,16 м. �а � ∙ ��,� �(t � =) 32,8 t2 √8� + 0,5t � −=а2,8 , = км/ч. Sо SудV=Н = �26� �=�√17 31,1 м. � 1 +� 3 ∙ 8,0 ���37,6 �,� а �пн � √26 ∙ 6,8�,� а �1,1 � �,265 �,16 � 0,�5 � � � � � ; ��аа�� ��,� ��,� ) +а 19,8 � Sо =Т'(t +д.н1 += tt21 ++=0,5t 17,6 =,Н37,4 м. SО = (0,8 + 0,1 + 0,5 ∙ 0,35) 59,1 7,2 t + + = 30,5t 2 �,� ��� �� ∙ �,� �,� � �� � � �,�� аа (3) (5) (3) (6) (4) а � ��,����,� ��,� � ��,� V0,8 =+0,5 ∙ 6,8 =, 1,075 37,6 км/ч. (5) X√Ф26 �26� Н+ M �∙=8,0 0,1∙ 0,35) +а �0,5 ∙ 0,35 +=0,88 пн � += +К 17,6 + 19,8 37,4=м.1,95 с. (12)(12) (4) SО = (0,8 +=0,1 �� � �,� ∙ �,� �,� �� ∙ �,� � ���� � Н 1,12 �П +�,� �,� ��П = t маневра; = аКмМ+= bаммV+ коэффициент К+ =аМ�� 1,12 ++3,9 0,005 = 1,2; 1,2; (6) а(5) где КМгде – коэффициент = 0,005 МК м = 0,5t = д.н � 1 26 2∙∙ 6,8 a�26� Va Нb–м=V ∙=8,0 = 37,6 км/ч. =+ tманевра; ∙ Т' = 1,95 = м. ∙∙ ��� = (7) S'4,265 = LаТ' 0,52 м. (15) Sдоп √ П д.н а�пн = �,�� а �,� �,� �а ��,� от дорожного ам, bм – эмпирические коэффициенты, зависящие � коэффициенты, 1,12 и bм = 0,0050 – эмпирические �а �� �а Н зависящие от дорожного �а+ ��,����,� = 0,8 +(табл. 0,1 + 0,5 ∙а10,35 =0,5t 1,075 + �,�� 0,88 1,95м.с. +b��,� t2− +∙ 0,0050; +13,1 = (6) (8) Т' ∆=ty1t= = =4,0 −φ ==3,16 д.н1,12, 1S = = 0,8 м; П�,� покрытия 4), S = = – сце-(17) �,� ∙ �,�� � � коэффициент ���� м м �,� �,� покрытия 4.1); коэффициент сцепления = ам + bмVφa y––коэффициент маневра; КМyва=поперечном 1,12 + 0,005направлении; ∙ = 1,2; ам = где КМ(табл. ��� � �,� пления в поперечном направлении, φy = 0,8φх = ��,� 0,8 ∙ 0,8 = 0,64; �а ��,� =�а +tП2р��,����,� ∙L=Т' 1,95 =+м, 3,9 м.= 1,95 (7) (10) S' ∆ = ∙ 4,265 ∙ = 0,35 м, П0,005 д.н =∙ 0,005 = 0,8 + 0,1 + 0,5 ∙ 0,35 = 1,075 0,88 с. Б a S = 0,3 = 4,9 (18) 2р �,� �,� 0,8φ 0,8=–∙0,0050 0,8 = 0,64; φх�,�=сцепления 0,8 ∙∙�,� 0,8 =в0,64 – коэффициент сцепления в φy =1,12 �,� �,��,� �,� φ хи==b0,8 коэффициент продольном направлении; – эмпирические коэффициенты, зависящие от дорожного х м �,�� а ��а �,� �∆ �П ��уд Б YМ – поперечное смещение необходимое для безопаспродольном направлении; поперечное смещение автомобиля, необходимое − ∙ Т' = 4,0 −∆�1,95 м. (8) y–= =SПавтомобиля, 3,9 (7)(11) .==3,16 покрытия (табл. 4.1); φYyМ∆–S' коэффициент в м. поперечном направлении; П д.н =�сцепления �,� � �а �,� �П� ного объезда пешехода, м: для безопасного объезда пешехода, ��,�– коэффициент сцепления в �,�� 0,8 ∙∆0,8 = 0,64; φ�аахм:== �0,005 0,8 ∙ 0,8 = 0,64 φy = 0,8φ а х = объезде 0,005 4,265 0,35 м, (10) • при ∆yLL=aa S��,� − 0,005 = 4,0 − ∙∙=��,� 3,16 м. м. (8) ∆ББ==сзади 0,005 ∙∙ 4,265 == 0,35 П= 95 �,� � � �,� �,� • при объезде сзади продольном направлении; Y – поперечное смещение автомобиля, необходимое YМ = BA + ∆Б − lМy�= +∆�0,35 − 0,5 ∙ 1,68 (13) �∆Б�,�� уд �� �1,68 ��,� = 1,19 м; а�аа (11) ∆AБ + =∆ 0,005 L=a−�1,68 =� 0,005 ∙. 4,265 ∙ 1,68м.==0,35 м, (10) S = 4,0 − = 3,16 = B − l + 0,35 − 0,5 ∙ 1,19 м; (13) Y yБ = П М y � �,� �,� а � для безопасного объезда пешехода, м: П � • при объезде спереди �а �уд�,265 ��а ∆� �∆ • при• объезде Б ��,� �,16 �1,1 =0,005 ∆Бсзади +L lya+ S=� = 0,35 + 0,5 ∙1,68 + 0,35 0,52 м. = 1,71 м, (14) (11) ∆YБМ=спереди 0,005 ∙�4,265 ∙ � 0,�5 = при объезде �,� доп �а ; � �П . �,� 7,2 59,1 ∆расстояние + 0,5 0,35 ∙1,68−+0,5 0,52 = 1,71 м, ТС YМ =– Б + ly + S� доп−= где ly = 0,5B отl0,35 поверхности = 1,68 ∙ 1,68 = 1,19 м; до (14) (13) �,��+боковой y правой A YМ = BA +�∆ ��,� ∆y = SLПa −а Ба==0,005 4,0 −∙ 4,265 = 3,16 м. ∆ = 0,005 ∙ = 0,35 м. � Б �S � ���,� пешехода, – дополнительный путь,ТС проходимый где ly =точки 0,5B – объезде расстояние отм; правой поверхности до точки удара(12) �,� а �� Aудара доп Xбоковой • при спереди , Ф = КM � �� � пешеходом за время проезда ТС мимо него, �,16 � 0,�5 �1,1 � �,265 �а �,�� пешехода, м; Sдоп – дополнительный проходимый пешеходом =доп 4,0 =0,5 3,16∙1,68 ; м. + 0,52 �путь, y= ∆SБ П+−ly + = −0,35 +�,� = 1,71 м,за время (14) YМ∆= � �S �7,2 П 59,1 S = L = 4,265 ∙ = 0,52 м. (15) (15) доп а проезда мимо него, �1,1 ��,� а �,16 � 0,�5поверхности ТС до точки удара � �,265 где lТС от�правой боковой y = 0,5BA – расстояние � ��а �� �пешехода: � ��� �а КM ��,� ПXФ = Условие безопасного объезда , ;м. (12) � 7,2 = L59,1 4,265 ∙ путь, =0,8 0,52 (15) �� = t = ∙ = 13,1 м; пешеходом за (17) а S1 = пешехода, м; Sдоп S–допдополнительный проходимый время 1 � �а ���� �,� �,� X < S − S − S , (16) �� Ф УД 1 2р �� �П �,� а � �= проезда ТСбезопасного мимоSнего, а К XФпешехода: , м. (12)(18) Условие объезда 4,265 ∙2рM=���,� =��0,52 доп = L а S= ∙�0,3 = 4,9 м, водителя, м, (15) �а 2р = �,� tТС ��,� где S1 – расстояние, проходимое за�,� время реакции �П ��� =S4,265 = 0,52 м. SX < LS � −��,� (16) (15) доп Ф�= 1 − S2р∙, П�а аУД (17)(17) =а ∙ ∙�,� 0,8==���� 13,1м. м; 0,52 (15) Sдоп =SL 1 а= =t14,265 �,� ��,� ��,� проходимоеаобъезда ТС за время реакции водителя, м, где S1 – расстояние, Условие безопасного пешехода: �а�а ��,� где S2р – расстояние,Sпроходимое ТС за время срабатывания рулево-(18) ��,� м,м; ����∙ 0,3 2р SS1===�,��tа2р t1t ==�,� 0,8 13,1 (17) 95− =S=4,9 13,1 м; (17) (16) �,�− S∙ 10,8 , X��� 1 �,� 1 SУД го управления, м, Ф< 2р ��� � ��,� за время S2р = а t2рТС =ТС ∙ 0,3 =реакции 4,9 м, водителя, м, (18) (18) расстояние, проходимое проходимое где где S2р S1–– расстояние, �,� �,� за время срабатывания рулевого � ���� а управления, где t1 =м,0,8 с – время реакции = 0,2…0,4 с для легковых t1 = t2р∙ 0,8 = 13,1 м; (17) S1 =водителя; ���95 ��� автомобилей; принимаем t2р�а= 0,3 с. ���� = t2р = ТС ∙ 0,3за= 4,9 м, срабатывания рулевого (18) время где S2р – расстояние, S2рпроходимое ��� Подставив в выражение���(18) принятые значения, найдем мини95 управления, м, мальное расстояние XФ, необходимое � ∙ ����� ∙ ���� для перестроения вида «смена XФ = 1,2� = 24,2 м; (19) полосы движения» с поперечным на величину YМ: ���� ���� ���� ∙ �����а ∙ смещением S2р = t2р = ∙ 0,3 = 4,9 м, (18) ��� ��� при объезде сзади: • при•объезде спереди: � ∙ ����� ∙ ���� (19) XФ = 1,2� = 24,2 м; (19) � � ∙ ���� ���� ∙∙ ���� ���� ∙ ���� = 29,0 м. (20) XФ = 1,2� � ���� ∙ ��� ∙ ���� • при объезде спереди: — 94 — Определим значение (SУД − S1 − S2р) = (31,1 − 13,1 − 4,9) = 13,1 м и � ∙ ����� ∙ ���� = 1,2� = 29,0 м. м и SУД − S1 − S2р = (20) XФИз сравнения = 24,2…29,0 сравним с XФ = 24,2…29,0 м. ���� ���� ∙ ����X∙ Ф XФ = 1,2� • при объезде спереди: • при объезде спереди: � ∙ ����� ∙ ���� ���� ∙ ���� ∙ ���� XФ = 1,2� � ∙ ����� ∙ ���� = 24,2 м; ���� ∙ ���� ∙ ���� = 29,0 м. (19) (20) (20) Определимзначение значение(SSУД − S − S2р2р= 31,1 −13,1 − 4,9−=4,9) 13,1=м13,1 м и ) = (31,1 − 13,1 Определим УД − S11 − S и сравним с XФ = 24,2…29,0 м. Из сравнения XФ = 24,2…29,0 м м. Из сравнения XФ = 24,2…29,0 м и SУД − S1 − S2р = сравним с XФ = 24,2…29,0 и SУД − S1 − S2р = 13,1 м следует XФ > (SУД − S1 − S2р), что означает невыполнение условия безопасного объезда пешехода (16). 96 5.2. Вывод: водитель автомобиля ВАЗ-2110 не располагал технической возможностью предотвратить наезд на пешехода путем маневра объезда пешехода при расчетной скорости движения. По 6-му вопросу 6.1. В данной дорожной обстановке пешеход Коваль М.А. должен был руководствоваться требованиями следующих пунктов ПДД РФ: «4.3. Пешеходы должны переходить дорогу по пешеходным переходам, в том числе подземным и надземным, а при их отсутствии – на перекрестках по линии тротуаров или обочин. <…> При отсутствии в зоне видимости перехода или перекрестка разрешается переходить дорогу под прямым углом к краю проезжей части на участках без разделительной полосы и ограждений там, где она хорошо просматривается в обе стороны. …4.5. На нерегулируемых пешеходных переходах пешеходы могут выходить на проезжую часть (трамвайные пути) после того, как оценят расстояние до приближающихся транспортных средств, их скорость и убедятся, что переход для них будет безопасен. При переходе дороги вне пешеходного перехода пешеходы, кроме того, не должны создавать помех для движения транспортных средств и выходить из-за стоящего транспортного средства или иного препятствия, ограничивающего обзорность, не убедившись в отсутствии приближающихся транспортных средств». Поскольку в данной ДТС пешеходом была создана помеха для движения автомобиля ВАЗ-2110 и водитель вынужден прибегнуть к экстренному торможению, действия пешехода Коваля М.А. противоречили требованиям п. 4.5 ПДД РФ. — 95 — 6.2. В данной дорожной обстановке водитель автомобиля ВАЗ2110 Павлов А.А. должен был руководствоваться требованиями следующих пунктов ПДД РФ: «10.1. Водитель должен вести транспортное средство со скоростью, не превышающей установленного ограничения, учитывая при этом интенсивность движения, особенности и состояние транспортного средства и груза, дорожные и метеорологические условия, в частности видимость в направлении движения. <…> При возникновении опасности для движения, которую водитель в состоянии обнаружить, он должен принять возможные меры к снижению скорости вплоть до остановки транспортного средства. 10.2. В населенных пунктах разрешается движение транспортных средств со скоростью не более 60 км/ч…». Исследования показали, что водитель Павлов А.А. двигался со скоростью, не превышающей установленных ограничений, он своевременно применил экстренное торможение и не располагал технической возможностью предотвратить наезд на пешехода. Следовательно, его действия не противоречат требованиям п. 10.1 и 10.2 ПДД РФ. ВЫВОДЫ 1. Скорость движения автомобиля ВАЗ-2110 перед торможением могла быть равной примерно 59,1 км/ч. 2. Удаление автомобиля ВАЗ-2110 от места наезда в момент выхода пешехода на проезжую часть составляет примерно 31,1 метра. 3. Водитель автомобиля ВАЗ-2110 не имел технической возможности предотвратить наезд путем экстренного торможения. 4. Водитель автомобиля ВАЗ-2110 не избежал бы наезда на пешехода, не применяя торможение. 5. Водитель автомобиля ВАЗ-2110 не располагал технической возможностью предотвратить наезд на пешехода путем маневра объезда пешехода при расчетной скорости движения. 6. В данной дорожной обстановке пешеход Коваль М.А. должен был руководствоваться требованиями п. 4.4 и 4.5 ПДД РФ. В его действиях усматривается несоответствие требованиям п. 4.4 и 4.5 Правил. Водитель автомобиля ВАЗ-2110 Павлов А.А. должен был руководствоваться требованиями п. 10.1 и 10.2 ПДД РФ. Его действия указанным пунктам Правил не противоречили. — 96 — 5.2. Исследование наезда транспортного средства на пешехода при обзорности, ограниченной неподвижным препятствием Основанием для проведения экспертного исследования является постановление следователя СУ при Управлении МВД России по г. Тольятти капитана полиции Петрова П.П. от 28 февраля 2017 года о назначении автотехнической экспертизы по материалам уголовного дела № 137/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ. ПОСТАНОВЛЕНИЕ о назначении автотехнической экспертизы г. Тольятти 28 февраля 2017 г. Следователь СУ при Управлении МВД России по г. Тольятти, капитан полиции Петров П.П., рассмотрев материалы уголовного дела № 137/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ, УСТАНОВИЛ: 10 января 2017 г. в 09 час 15 мин при следовании по ул. Вокзальной со стороны ул. Лесной в направлении ул. Мира г. Тольятти водитель Иванов И.И., управляя технически исправным автомобилем ВАЗ-2115, совершил наезд на пешехода Рожко С.К., причинив ему тяжкие телесные повреждения. Автомобиль ВАЗ-2115 двигался с полной нагрузкой во втором ряду с постоянной скоростью около 60 км/ч (16,7 м/с) на расстоянии 4,5 метра от правого края проезжей части. Дорожные условия на момент ДТП: сухой асфальт; профиль дороги горизонтальный; ширина проезжей части 14 метров; движение двустороннее. Видимость в направлении движения ТС более 300 метров; обзорность с места водителя по направлению движения пешехода ограничена неподвижным препятствием справа. Наезд произошел правой боковой частью ТС на расстоянии один метр от передней части. Место наезда на пешехода находится на расстоянии 4,5 метра от правого края проезжей части дороги. Пешеход – мужчина в возрасте 60 лет – пересекал проезжую часть в поперечном направлении справа налево по ходу движения — 97 — ТС в темпе быстрого шага впереди стоявшего у обочины автобуса ГАЗ-322132 на расстоянии 1 метр от его передней части. Опасная ситуация возникла в момент выхода пешехода из-за неподвижного препятствия в поле обзорности с места водителя ВАЗ-2115. На основании изложенного и руководствуясь ст. 195 (196) и 199 УПК РФ, ПОСТАНОВИЛ: 1. Назначить по настоящему делу автотехническую экспертизу, производство которой поручить ЭКЦ ГУ МВД России по Самарской области. 2. На разрешение эксперта поставить следующие вопросы: 1) на каком удалении от места наезда на пешехода находилось ТС в момент выхода пешехода в поле обзорности с места водителя; 2) имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения; 3) имелась ли возможность безопасного перехода пешеходом полосы движения автомобиля; 4) имелась ли возможность безопасного проезда незаторможенного автомобиля перед пешеходом; 5) какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ? 3. Руководителю ЭКЦ разъяснить эксперту его права и обязанности по ст. 57 УПК РФ и предупредить его об уголовной ответственности по ст. 307 УК РФ. Следователь _____________________________ Петров П.П. — 98 — ЗАКЛЮЧЕНИЕ ЭКСПЕРТА по уголовному делу № 137/2017 о наезде автомобиля ВАЗ-2115 на пешехода г. Тольятти 24 марта 2017 г. ВВОДНАЯ ЧАСТЬ 09 марта 2017 г. в ЭКЦ ГУ МВД России по Самарской области при постановлении следователя, капитана полиции Петрова П.П. поступили материалы уголовного дела № 137/2017 о наезде автомобиля ВАЗ-2115 под управлением Иванова И.И. на пешехода Рожко С.К. для проведения автотехнической экспертизы. На разрешение эксперта поставлены следующие вопросы: 1. На каком удалении от места наезда на пешехода находилось ТС в момент выхода пешехода в поле обзорности с места водителя? 2. Имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения? 3. Имелась ли возможность безопасного перехода пешеходом полосы движения автомобиля? 4. Имелась ли возможность безопасного проезда незаторможенного автомобиля перед пешеходом? 5. Какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ? Проведение экспертизы поручено эксперту Сидорову С.С., имеющему среднее профессиональное автотехническое образование. ПОДПИСКА Мне, эксперту Сидорову С.С., разъяснены права и обязанности эксперта, предусмотренные ст. 57 УПК РФ. Об уголовной ответственности за дачу заведомо ложного заключения по ст. 307 УК РФ предупрежден. Эксперт ______________ Сидоров С.С. — 99 — ИСХОДНЫЕ ДАННЫЕ К ЭКСПЕРТНОМУ ИССЛЕДОВАНИЮ ДТП 1. Обстоятельства ДТП: 10 января 2017 г. в 09 час 15 мин при следовании по ул. Вокзальной со стороны ул. Лесной в направлении ул. Мира г. Тольятти водитель Иванов И.И., управляя технически исправным автомобилем ВАЗ-2115, совершил наезд на пешехода Рожко С.К., причинив ему тяжкие телесные повреждения. 2. Дорожные условия: состояние дорожного покрытия – сухой асфальт; нерегулируемый пешеходный переход; количество полос – четыре; ширина проезжей части 14 м; профиль дороги горизонтальный. 3. Наличие следов транспортного средства: следы торможения отсутствуют. 4. Расположение места наезда на пешехода: место наезда расположено на расстоянии 4,5 метра от правого края проезжей части по ходу движения автомобиля ВАЗ-2115. 5. Условия видимости: видимость в направлении движения более 300 метров. 6. Скорость движения транспорта: скорость движения автомобиля составляла около 60 км/ч. 7. Степень загруженности транспорта: автомобиль с полной нагрузкой. 8. Техническое состояние транспорта: автомобиль технически исправен. 9. Возраст и пол пешехода: мужчина возраста 50 лет. 10. Направление движения пешехода по отношению к ТС (справа, слева, попутное, встречное): пешеход пересекал проезжую часть в поперечном направлении справа налево по ходу движения автомобиля ВАЗ-2115. 11. Темп движения и (или) скорость движения пешехода: пешеход двигался со скоростью 5,4 км/ч. 12. Расстояние от препятствия, ограничивающего обзорность с места водителя, до пешехода, вышедшего на проезжую часть: пешеход вышел на проезжую часть на расстоянии 1,0 метра от стоявшего у правого края автобуса ГАЗ-322132. 13. Боковой интервал между ТС, совершившим наезд, и препятствием, ограничивающим обзорность с места водителя: боковой интервал между стоящим автобусом ГАЗ-322132 и автомобилем ВАЗ-2115 составлял 2,5 метра. — 100 — 14. Условия обзорности пешехода с места водителя (неограниченная, ограниченная условиями видимости, неподвижным объектом, попутным или встречным): обзорность с места водителя ограничена стоявшим у обочины автобусом ГАЗ-322132. 15. Какой частью ТС произошел наезд на пешехода (передней частью, боковой частью): наезд произошел правой боковой поверхностью автомобиля ВАЗ-2115. 16. На каком расстоянии от передней (при наезде боковой частью) или от боковой (при наезде передней частью) находится точка контакта с пешеходом: на расстоянии 1 метр от передней части. 17. Какой момент принять за момент возникновения опасности для движения водителя: за момент возникновения опасности для движения водителя принять момент выхода пешехода в поле его зрения из-за неподвижного автобуса. 18. Схема ДТП приведена на рисунке. ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА 1. Иларионов, В.А. Экспертиза дорожно-транспортных происшествий : учебник для вузов / В.А. Иларионов. – М. : Транспорт, 2013. – 255 с. 2. Суворов, Ю.Б. Судебная дорожно-транспортная экспертиза. Судебно-экспертная оценка действий водителей и других лиц, ответственных за обеспечение безопасности дорожного движения, на участках ДТП : учебное пособие / Ю.Б. Суворов. – М. : Экзамен : Право и закон, 2004. – 208 с. 3. Домке, Э.Р. Расследование и экспертиза дорожно-транспортных происшествий : учебник для студ. высш. учеб. заведений / Э.Р. Домке. – 2-е изд., стер. – М. : Академия, 2012. – 288 с. 4. Инструкция по организации производства судебных экспертиз в государственных судебно-экспертных учреждениях системы Министерства юстиции Российской Федерации. Утверждена Приказом Министерства юстиции Российской Федерации от 20 декабря 2002 № 347. – URL: ceur.ru/library/docs/departmental_requlations/ item 132780. — 101 — Ул. Вокзальная Ba1 Δ 4 ∆y Sуд аx аy Е А• Ba2 lх 2 В 1 (3) × ∆x D C 5 VП SП Ул. Мира Ул. Лесная La1 Рисунок. Схема пешехода,вышедшего вышедшего на проезжую Рис. 1. Схеманаезда наезда на на пешехода, на проезжую часть часть справасправа в в поперечном направлении из-за неподвижного препятствия, боковой поперечном направлении из-за снеподвижного частью ТС, частью ТС, движущегося постояннойпрепятствия, скоростью;боковой 1 – ВАЗ-2115; 2 – ГАЗ-322132; (×) – местоскоростью; удара; 4 –(3)× направление движения ВАЗ-2115; движущегося с3 постоянной – место удара; 1 – ВАЗ-2115; 2– 5 – направление движения пешехода ГАЗ-322132; 4 – направление движения ВАЗ-2115; 5 – направление движения пешехода: ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ ах = 1,8 м – расстояние от места водителя до передней части ВАЗ-2115; И СОКРАЩЕНИЯ: ay = 1,15ОБОЗНАЧЕНИЯ м – расстояние от места водителя до правой боковой части = 1,8 м – расстояние от места водителя до передней части ВАЗ-2115; а х ВАЗ-2115; м – расстояние от места водителя до правой боковой части ВАЗay =м1,15 Ba1 = 1,65 – ширина ВАЗ-2115; 2115; Ba2 = 2,00 м – ширина автобуса ГАЗ-322132; м – ширина ВАЗ-2115; La1 = 4,0Ba1м=–1,65 длина ВАЗ-2115; = 2,00 м – ширина автобуса B удара пешехода боковой частью до lx = 1,0 мa2– расстояние от местаГАЗ-322132; La1 части = 4,0 м –ВАЗ-2115; длина ВАЗ-2115; передней м – расстояние от местадвижения удара пешехода боковойдочастью до Δx = 1,0lxм= –1,0расстояние от линии пешехода передней передней части ГАЗ-322132; ВАЗ-2115; части автобуса = 1,0 м – расстояние от линии движения пешеходаидоавтобусом передней части Δ Δy = 2,5 xм – боковой интервал между ВАЗ-2115 ГАЗавтобуса ГАЗ-322132; 322132; = 2,5 м – боковой от интервал между ВАЗ-2115 и автобусом ГАЗ-322132; Δy – Δ = 4,5 м расстояние правой боковой поверхности ВАЗ-2115 до правогоΔкрая части; = 4,5проезжей м – расстояние от правой боковой поверхности ВАЗ-2115 до t1 =правого 0,8 с –края время реакции проезжей части; водителя; 109 t2 = 0,1 с – время срабатывания тормозов; t3 = 0,35 с – время нарастания замедления до установившегося значения; Ja = 6,6 м/с2 – установившееся замедление при торможении; Va1 = 60 км/ч или 16,7 м/с – скорость ВАЗ-2115; VП = 5,4 км/ч или 1,5 м/с – скорость движения пешехода. — 102 — ИССЛЕДОВАНИЕ По 1-му вопросу 1.1. Удаление автомобиля ВАЗ-2115 от места наезда Sуд в момент появления пешехода в поле обзорности с места водителя (см. рис.) определим, используя соотношения сторон треугольников: ��удуд �� �� �∆��∆� ∆ ∆ ������� уд �∆ ��� ∆�� �,;, , ���� � ∆ ��ПП� �� �� �∆��∆� ∆��∆� �� П∆ � � SSПSП= (S +++ lxl)xl)x�П)П, ,П,; (S(S уд П== удуд � � а а�а ��удуд �� �� �∆��∆� ∆∆��∆ �� ������� уд �∆ а�а�а ��� ,, , ∆∆��∆�� �� � � �� ���� �� �� � � �∆��∆�� ��уд � � �� � П а а�а �� уд � П∆ � уд � �� П�� (1) (1) (1) (1) (2) (2) (2) (2) (3) (3) (3) (3) ��удуд ��,���,� � ��,���,� �,� ∙до �,� ∙ ��,� ��,���,� �,� ∙��,� ��,� уд где ах – расстояние от места�водителя передней . . . части ВАЗ-2115, ���� ����,���,���,� ∙ ∙��,� �,���,�� ��,���,���,� ∙ ��,� �,���,�� ��,���,���,� ��,� �� �,���,�� уд уд уд ах = 1,8 м; ay – расстояние от места водителя до правой боковой ��удуд �� ��,� �,� – расстояние ��,� ��,� ��,� ��,� уд части ВАЗ-2115, ay = 1,15 м; Δ � x� ��,� ∙ � ���,��;; ; от линии движения �,�� ���,�� �,�∙ �уд ∙ уд �уд �,�� ���,�� �,� �,�� пешехода до передней части автобуса ГАЗ-322132, Δx = 1,0 м; Δy – �� � ��уд� − 26,7 ∙ S − 62,1 = 0. боковой интервал между ВАЗ-2115 и автобусом ГАЗ-322132, − 26,7 ∙ S − 62,1 = 0. удуд− 26,7 ∙ Sудудуд− 62,1 = 0. � � � � ∆ ∆ уд места � �удара �пешехода боковой частью Δy = 2,5 м; lx – расстояние от , � � � ��,� ��,�� ��,� ��,�� ��,� ��,�� � � ∆�� �П � ∆� �∆� � � � � ∆ � � � � до передней Sчасти ВАЗ-2115, l = 1,0 V= –+ скорость ВАЗ-2115, � = + � � � 62,1 13,3 15,5 === 28,8 м. ∆м; ∆62,1 �� �� 13,3 15,5 28,8 SудSудуд==� � +уд+ уд��������x� ++ 15,5 28,8 м.м. � == �62,1 a13,3 � �, , � � � ∆ � � ∆ � � ∆ � � ∆ П �уд �м/с; � П � � ������∆� П∆скорость Va = 60 км/ч или 16,7 V – движения пешехода, � SП = (S П �уд + lx) �,а , ��аа�а ��а�а��а� �S �S∆=� = ��∆+ �S � 0,5t ++ t��Пt+ 0,5t ) 3) +++ , , , VП = 5,4 км/ч или 1,5 м/с. ООО=(t(t1(t 1 ∙ ∙�а�∙а�а = уд (Sуд , � 33)�,� �,� �� �� + 1l++x)2tl2xП)2,+�П∆0,5t �,� �� П�(S �удS�ПS �= � ∆� � � а а � а П значения,, получим следующее Подставив в (3) принятые выше � �� � S∆П� �=�(S + l ) , уд x ��,� �� �� � �� ���� � ∆� �а ��,� ��,� П�� � �0,1 ��0,5 ∆∙��∙0,35) �уд ���++ �+ ∆+ �+ ∆уд �∆ (0,8 +�+уд+ 0,1 0,5 = 17,9 +++ 21,0 === 38,9 м. SSОSО= а (0,8 0,1 ∙0,35) 0,35) 17,9 21,0 38,9 �а� а�+ (0,8 0,5 21,0 38,9 м.м. выражение: О== �� ∙ �,� �,� �� , ,==17,9 ��∙ �,� ∙ �,� �,� �� �,� �� ��,���,� �,� ��,� ∆уд ���уд�∆� ��аП�� ∆ ��уд � �уд∆ ��� �� П∆� � �∆��� ���� �∙ � а� �а ��� � � , ∙ ��,�. (4) ��,���,���,� �,���,�� ∆��,���,� � ���уд �√ �∙∙∙∆10,1 � ∙ ∙��∙�пн ∙ ∙�∙�пн ����� 26 === 41,6 км/ч. VVНVН= �26 = � � ∙10,1 10,1 ∙6,6 6,6 41,6 км/ч. �� �уд П � а ∙ ∙6,6 �26 26 41,6 км/ч. � ��,���,� �уд √ �26 Н= �,� ��,� �,� ∙26 ��,� √�� пн пн уд пн пн � . � . �уд�� �уд �,� ��,���,���,� ∙ ��,� �����,� �� �,���,�� ��,���,���,� ∙ ��,� �уд�,���,�� ��,���,� После преобразований уд�,� ∙ ��,���,� �� ��� �����,� ���� нн н имеем � �� � �== . ;+++�����,� TTaнTaнaн === t1t1t+1++ t2t2t+2++ 0,5t = 0,8 + 0,1 + 0,5 ∙ 0,35 === 1,85 с.с.с. 0,5t 0,8 + 0,1 + 0,5 ∙ 0,35 1,85 0,5t 0,8 + 0,1 + 0,5 ∙ 0,35 1,85 3�,���,�� 3++ 3+ ���,�� �,� ∙ � �,�� �,� ∙ ∙�уд��∙��� �,� ∙ ∙�,� �,� �уд �,� ∙ �,� уд ��,���,���,� �,� �,� �,� ��� �,� � ��,� ��,�уд∙ ��,� ��,� (4) (4) (4) (5) (5) (5) (6) (6) (6) (1) (7) (7) (7) (1)(1) (1) (2) (8) (8) (8) (2)(2) (2) (3) (9) (9) (9) (3)(3) (3) (4) (13) (13) (13) (4)(4) (5) (4)(14) (14) (14) (5)(5) (6) (18) (5)(18) (18) (6)(6) (7) (6)(19) (19) (19) (7)(7) (20) (8) (20) (7)(20) (8)(8) (21) (9) (21) (8)(21) (5) � � �,� ∙ � ���,�� ; ; � �,� �,�� �,� ∙ ���,� �,� �,� �,� �уд�,�� � �,� �,� �,� уд∙ ���,�� �−уд − 26,7 Sудуд − 62,1 =− 0.1,0) Т'' (S + L − l ) = (29,3 + 4,0 − 1,0) = 1,94 с, Т'' + L − l ) = (29,3 + 4,0 = 1,94 с, � ; Т'' (S(S + L l ) = (29,3 + 4,0 − 1,0) = 1,94 с, а а= уд a1 x а== уд a1 x уд a1 x � � �� �� �,� �,�� � �� а ∙а� ���,�� �� � − 26,7 Sуд − 62,1 = 0. �уд − 26,7 ∙аS�∙удуд − 62,1 = 0. (6) уд ��,� � ��,�� �� �,� �,� �,� ПП�П � Sуд = �S'' + � � � 62,1 13,3 + 15,5 = 28,8 м. = Т'' ∙ = 1,94 ∙ = 2,91 м. − 26,7 ∙ S − 62,1 = 0. S'' = Т'' ∙ = 1,94 ∙ = 2,91 м. S''ППП= Т'' = 2,91 м. а а а∙ уд = 1,94 ∙ уд � вид Решение (6)��,� имеет �,� �,� �,� �� � �,� �,� �,� ��,� ��,�� ��,�� � � + � � � 62,1 = 13,3 + 15,5 = 28,8 SудSуд = = ��уд�+ � � � 62,1 = 13,3 + 15,5 = 28,8 м.м. ��� �� ∆� �� �∆ ���∆ �� �а �а� уд � �∆ �� � уд � �� � ∆∆ ��,� ��,�� � , (7) � , S = (t + t + 0,5t ) + , � , � О 1 2 3 Sуд = + ��∆ 62,1 = 13,3 �,� + 15,5 м. �� � � ��П� �∆ ��=∙ �28,8 �∆ �∆ �� � � �∆ П �∆ а �� П� � ���� �а �а �а� �а� =1(t+1 t+2�,� t�,� + 0,5t )��,� , SОS=О (t + + , ��,� 2 0,5t 3) 3�� � + � �,� ��,���,���,� ��,���,���,� ��,� ��,�ВАЗ-2115 ��,���,���,� �,� �,� �� ∙�,� �,� �� �аместа 1.2. Вывод: удаление автомобиля а ; наезда в мо�а��,� �от а∙17,9 � , или � � , или � ; 0,1 + 0,5 ∙ 0,35) + = +; 21,0 = 38,9 м. SО = (0,8 + �,����,� � , или � S = (t + t + 0,5t ) + , О 1 �� 2� ��,� ��,� �,����,� �,�� ���,�� ∙ �,� �,� 3� �,� ��,� ��,� �,����,� �,�� П ПП� П ��,� П��,� ��с∙���места а П мент появления пешехода в поле обзорности водителя со��,� ��,� �� ��� = (0,8 + 0,1 + 0,5 ∙ 0,35) + + � = 17,9 = 17,9 + 21,0 = 38,9 (9) + 0,1 + 0,5 ∙ 0,35) + 21,0 = 38,9 м.м. (9) SОS=О (0,8 29,6 (S�пн 2,5) = 3,65; (22) �� ∙3,65; �,� �,� �� ∙= �,� 29,6 (S − 2,5) = 3,65;∙ 6,6 = 41,6 км/ч. (22) 29,6 2,5) (22) П�,� ��,� �� ставило примерно 28,8 м. П− П− = �26 � пн ∙ (S + 0,5∙ ∙�0,35) +√26 ∙ 10,1 = 17,9 + 21,0 = 38,9 м. (9) (13) SО = (0,8 +VН0,1 �� ∙ �,� �,� = 2,62 м. м. �����,� = �26 ∙ 2,62 10,1 ∙ 6,6 = 41,6 км/ч. (13) ∙ �∙���� ∙ �∙ � � � ∙= 10,1 ∙м. 6,6 = 41,6 км/ч. (13) V V= �26 S√ 2,62 ПS26 П= √S26 Taн = t1 + Нt2 Н+ 0,5t3 + пн� пннпн=пн0,8 +П0,1 + 0,5 ∙ 0,35 + = 1,85 с. (14) �,� ∙ � �,� ∙ �,� � = ∙ � ∙ � � 26 ∙ 10,1 ∙ 6,6 = 41,6 км/ч. (13) V �26 √ Н следует, пн пн � �� �����,� � �� �����,� Из расчета что сформулированное выше условие возможного � н � н Из расчета следует, что сформулированное выше условие возможного Из1 + следует, что сформулированное tрасчета t2 0,5t + 0,5t = + 0,1 + 0,5 ∙ 0,35 = 1,85 (14) TaнT= = 0,80,8 + 0,1 + 0,5 ∙ 0,35 + +выше =условие 1,85 с. с.возможного (14) aн t= 1 t+ 2+ 3 +3 + �,� �,� �,� ∙ �,� �,� ∙ �н�∙ �� �,��,� ∙ �,� � �����,� — 103 — � �� Т'' = (S + L − l ) = (29,3 + 4,0 − 1,0) = 1,94 с, (18) а уд a1 x Taн = t1 + t2 +проезда 0,5t = 0,8 + 0,1 �+а 0,5 ∙ 0,35 + =��1,85 с. (14) безопасного незаторможенного автомобиля ВАЗ-2115 перед безопасного проезда незаторможенного автомобиля ВАЗ-2115 перед 3+ безопасного проезда автомобиля ВАЗ-2115 перед �,� ∙ �незаторможенного �,� ∙�,� �,� �,� �,��,� � = уд (S+ L+a1L− = �(29,3 + 4,0 − 1,0) = 1,94 = 1,94 (18) Т''Т'' + 4,0 − �,� 1,0) с, с, (18) a1 l− а =а (S x)lx) = (29,3 Птак �� ммм �а �а �� SSПSПудне выполняется, как S'' 2,91 >>> SSПSП= 2,62 м. пешеходом (17) S'' не выполняется, так как = 2,91 2,62 пешеходом (17) �,� не выполняется, как S''S'' 2,91 == 2,62 м.м. пешеходом (17) S''S'' П< ПП= П<< П= ∙ так = =�,� 2,91 м. Т'' =П(S +ПL −S'' l )П = Т'' = а(29,3 + 1,94 4,0 −∙ 1,0) = 1,94 с, П (18) (19) �уд � �� � ∆� �� � ∆� � ∆� �П � ∆� , (1) � SП = (Sуд + lx) П, (2) По 2-му вопросу �а 2.1. Исследование водителя автомобиля ВАЗ-2115 �уд � �� � ∆� наличия ∆� �у а � , (3) ∆� � �� ��уд � �� ��П � ∆�наезда �а технической возможности избежать на пешехода путем экстренного торможения значений удаления ТС �уд ��,���,� проводим �,� ∙сравнением ��,� � . (4) ��,���,���,� ∙пешехода ��,� ��удпоявления �,���,�� от места наезда в момент в поле обзорности �уд � �� � ∆� ∆� , (1) остановочного пути SО. с места водителя Sуд�уд(см. � �,�рис.) и� ��,� �� � �П � ∆� ; �∆� (5) �,� ∙ �уд ���,�� �,�� у водителя Условием наличия технической возможности пре�П S = (S + l ) , торможения является выпол- (2) П уд x � дотвратить наезд на путем �удпешехода − 26,7 ∙ Sуд −�а62,1 = 0. (6) нение неравенства S > S . �уд � �уд ∆ �а � � ∆� О �� данных� условий , торможения определим (3) ��,� ∆ путь ��,�� Остановочный для � � �� � � ∆� �а + 15,5 � � � уд Sуд = + � � � 62,1���=П �13,3 = 28,8 м. (7) � � по формуле �уд ��,���,� �,� ∙ ��,� � (4) � � �. �,���,�� (8) SО = (t1 +��t2уд+��,���,���,� 0,5t3) а +∙ ��,�а , (8) �,� �� ∙ �а �уд � �,� ��,� � � ; где t1 – время реакции �,�� водителя, t��= 0,8 с; t2 – время срабатывания (5) ��,� �,� + ∙ 1�уд���,�� = 17,9 + 21,0 = 38,9 м. (9) SО = (0,8 + 0,1 + 0,5 ∙ 0,35) �� ∙ �,� �,� тормозов, t2 = 0,1 с; t3 – время нарастания замедления, t3 = 0,35 с; � �уд − 26,7 ∙ Sуд − 62,1 =автомобиля 0. (6) Vа – VНрасчетная = �26 ∙ �пн скорость ∙ �пн � √26движения ∙ 10,1 ∙ 6,6 = 41,6 км/ч. ВАЗ-2115, (13) Vа = 60,0 км/ч;���,� J�� – установившееся замедление, J = 6,6 м/с2. а ��,�� � �����,�а S3уд+= � н +=�0,8 � + 0,1 � � 62,1∙ 0,35 = 13,3 + 15,5в==формулу 28,8с.м. (8) поTaн = t1 + tПри + исходных 0,5 +данных 1,85 (14)(7) 2 + 0,5t подстановке принятых � � �,� ∙ �� �,� ∙ �,� лучаем значение остановочного пути при скорости дви� �,� �,� �а расчетной � а Т''а = (Sуд + La1 −SlОx)= (t1=+(29,3 + 4,0 − 1,0) =, 1,94 с, (18)(8) t + 0,5t ) + 2 3 � �� жения автомобиля ВАЗ-2115: �,� �� ∙ �а а � �,� � П ��,� �� = Т'' = 1,94 (9) (9) а∙ ∙ 0,35) + ∙ �,� = = 2,91 17,9 м. + 21,0 = 38,9 м. (19) SО = (0,8 + 0,1S''+П0,5 �,� �,� �� ∙ �,� �уд ��� �∆ ∆ ТС от места наезда в момент появления � Из сравнения удаления � ∙ �пн� � , √26 ∙ 10,1 ∙ 6,6 = 41,6 км/ч. (20) ∙ �пн (13) VН = ��26 �∆ � � � П �∆� пешехода в поле обзорности с места водителя Sуд = 28,8 м и остано�� ��н �����,� ��,���,���,� �,� ��,� Taн вочного = t1 + t2 +пути 0,5t + 0,1 +что 0,5 0,35 + = 1,85 с. (14) = 38,9=м0,8 следует, S∙уд� < SО�,� . �,� 3S+ , или ; (21) О �,� ∙ �� � �,����,� � ��,� �,�� � ��,� ∙ �,� Остановочный путь SОП =�,�38,9 м большеПудаления автомобиля от �,� Т''а = S(Sуд=29,6 +28,8 La1(S−м, )поэтому = =(29,3 + 4,0 − 1,0) = 1,94 с, (18) 2,5) 3,65; (22) Пlx− места наезда водитель не мог �а �� остановить авуд томобиль до линии следования пешехода, SП = �2,62 м. �,� даже если бы он принял S''П = Т''а ∙ П = 1,94 ∙ = 2,91 м. (19) �,� в момент �,� обнаружения пешехода. меры к экстренному торможению Из расчета следует, что сформулированное выше условие возможного ��� �∆� 2.2. Вывод:�удводитель автомобиля ВАЗ-2115 не мог остановить ∆ � � , (20) безопасногоавтомобиль проезда донезаторможенного автомобиля ВАЗ-2115 перед � �∆ � �∆ � � следования П � линии пешехода и избежать наезда, даже ��,���,���,� �,� ��,� �,�м > SП = 2,62 SП принял не выполняется, так, как м. пешеходом если (17) S'' бы меры торможению в момент П <он � к экстренному илиS''П =�2,91 ; (21) �,����,� �П ��,� �,�� �П ��,� обнаружения пешехода. 4.2. Вывод: при условии движения автомобиля ВАЗ-2115 без торможения 29,6 (SП − 2,5) = 3,65; (22) наезд на пешехода был бы неизбежен. SП = 2,62 м. Из расчета следует, что сформулированное выше условие возможного 106 — 104 —автомобиля ВАЗ-2115 перед безопасного проезда незаторможенного пешеходом (17) S''П < SП не выполняется, так как S''П = 2,91 м > SП = 2,62 м. По 3-му вопросу 3.1. Условием возможности безопасного перехода пешеходом полосы движения автомобиля ВАЗ-2115 является выполнение неравенства �уд � �� � ∆� ∆� � B ) +, ∆ , SП�′�> (∆ + (10)(1) �уд ���∆��� y∆� �Пa1� ∆∆�� Б �� Δ ,– боковой интервал меж- (1) где SП – путь, пройденный �пешеходом; �∆ � �∆ SП =� (Sуд� + lx) П,П y� (2) �а ду ВАЗ-2115 и автобусом ГАЗ-322132, Δ�yП= 2,5 м; Ba1 – ширина автомо, (2) � �� �S∆П� = (Sуд + ∆lx�)�� аа биля ВАЗ-2115, Ba1 =�уд1,65 м; ∆�Б – безопасный , боковой интервал меж-(3) ∆� � �� ��уд � �� ��П � ∆� �а �уд � �� �и∆пешеходом, ∆� �а определяемый по формуле � ду автомобилем ВАЗ-2115 � , (3) �уд ��,���,� ��,� ��уд ��,� ��∙�� П � ∆� �а = �� 0,005 ∙ La1 ∙ V∙ a��,� , . (11)(4) уд ��,���,���,� �уд ��,���,� �,� ∙ ��,� �уд � �,� � . (4) ��,� где La1 – длина автомобиля �� �,���,�� ВАЗ-2115. �уд ��,���,���,�; ∙ ��,� (5) �,� ∙ �уд ���,�� �,�� Подставив данные, получим �уд � �,� ��,� � � ∙∙S16,7 �уд − 26,7 =;0.м. (6) (5) уд∙ �− 62,1 ∆Б = 0,005 = 0,33 �,��∙ 4,0 �,� уд ���,�� Определим перемещение после0.пересечения им ли- (6) � � автомобиля ��,� ��,�� ∙ Sуд −= 62,1 Sуд = + ���уд − �26,7 � 62,1 13,3 = + 15,5 = 28,8 м. (7) � � нии следования пешехода: ∆� � �� �,���,��∆Б � � ��,� ��,�� �а = 10,1 �а м. − 28,8 SудS=ПН = S +О� 15,5 = 28,8 м. (12)(8) (7) S−О�S=уд(t= +38,9 t� 0,5t + + , 1� 2 +62,1 3)= 13,3 � � �,� � �� ∙ �а Скорость автомобиля ВАЗ-2115 в��момент пересечения линии � ��,� �а �а� = (0,8 + 0,1 + 0,5 ∙ 0,35) + = 17,9 + 21,0 = 38,9 м. (9) (8) S S = (t + t + 0,5t ) + , О О 1 2 3 следования пешехода �� ∙ �,� �,� �,� �� ∙ �а (13) ��� VН = �26 ∙ �пн ∙ �пн � √��,� = 41,6 км/ч. + 0,1 + 0,5 ∙ 0,35) 26 ∙+10,1 ∙ 6,6 = 17,9 + 21,0 = 38,9 м. (13) (9) SО = (0,8 �� ∙ �,� �,� ��автомобиля ��н �����,� Время Taн = t1 + tдвижения = 0,8 + 0,1ВАЗ-2115 + 0,5 ∙ 0,35с +момента= обнаружения 1,85 с. (14) 2 + 0,5t3 + �,� ∙ �� �,� ∙ �,� V = ∙ � ∙ � � 26 ∙ 10,1 ∙ 6,6 = 41,6 км/ч. (13) �26 √ линии следования Н водителем пешехода до пересечения пешехода пн пн Т''а = (Sуд��+�� Lнa1 − lx) Taн = t1 + t2 + 0,5t3 + �,� ∙ �� �,� S'' = Т'' ∙ �,� = (29,3 + 4,0 − 1,0)�����,� = 1,94 с, = 0,8�+а 0,1 + 0,5 ∙ 0,35 + �П = 1,94 ∙ �,� �� �,� ∙ �,� = 2,91 м. (18) = 1,85 с. (14) (14) (19) П �,� �,� �,�= (29,3 Перемещение пешехода заавремя Taн +�,� Т''а = (S 4,0 − 1,0) = 1,94 с, (18) уд + La1 − lx) �а �� � �� �∆ ∆� SП′ уд= V�П ∙ �T� = 1,5 ∙ 1,85 = 2,8 м; (15) ,� (20) aн �,� �� �∆� П �∆� П S''П = �Т'' = 1,94 ∙ = 2,91 м. (19) а∙ �,� �,� �,� ��,� = 4,48 �,� м. ) + ∆Б = 2,5 + 1,65 + 0,33 (16) (∆y + Ba1��,���,���,� � , или � ; (21) �уд�,����,� ��� �∆� �∆��,� �,�� � ��,� П� П � условию , Проверим соответствие безопасного перехода пе- (20) �� �∆� �П �∆� 29,6 (SП − 2,5) = 3,65; (22) шеходом полосы ��,���,���,� движения автомобиля ВАЗ-2115. Из сравнения �,� ��,� �,� , или � S ′ <; (∆ + B ) + ∆ , (21) S� П��,� = 2,62 м.�,��что SП′ = 2,8 м и (∆y + Ba1�,����,� ) + ∆Б = � 4,48 �П ��,� П м следует, П y a1 Б Из расчета следует, сформулированное выше условие возможного следовательно, условиечто (10) безопасного перехода пешеходом поло29,6 (SП − 2,5) = 3,65; (22) сы движения автомобиля ВАЗ-2115 не выполняется. безопасного проезда незаторможенного автомобиля ВАЗ-2115 перед SП = 2,62 м. 3.2. Вывод: автомобиль приблизился бы км.пеSП не выполняется, так как S''П = 2,91 м > SП = 2,62 пешеходом (17) S''П <заторможенный Из расчета следует, что сформулированное выше условие шеходу раньше, чем тот успел бы покинуть полосу движениявозможного авто4.2. Вывод: при условии движения автомобиля ВАЗ-2115 без торможения безопасного мобиля. проезда незаторможенного автомобиля ВАЗ-2115 перед наезд на пешехода был бы неизбежен. пешеходом (17) S''П < SП не выполняется, — 105 так — как S''П = 2,91 м > SП = 2,62 м. 4.2. Вывод: при условии движения автомобиля ВАЗ-2115 без торможения 106 �уд � �� � ∆� � �а ∆� �а , (3) ∆� � �� ��уд � �� ��П � ∆� �а �уд � �� � ∆� ∆� ��,� ∙ ��,� , (1) �уд ��,���,� ��� � ∆� �П � ∆� По 4-му вопросу . (4) ��уд ��,���,���,� ∙ ��,� �,���,�� � 4.1. В исследовании данного вопроса необходимо провести проП S�Пуд�= �,� (Sуд + lx) ��,� , (2) � а незаторможенного верку наличия возможности� проезда автомобиля (5) ; �,� ∙ �уд ���,�� �,�� � � � � ∆ ∆ � � � � � ∆ уд � � ∆ � а уд � � перед пешеходом. ,� � , (3) � � �� � � �� ∆� � �� � ∆∆���а = 0. �П�− � �П � ∆� �уд − 26,7 уд ∙ S � уд 62,1 Условием безопасного проезда незаторможенного автомобиля (6) �удпешеходом ��,���,� �,� ∙ ��,� � ВАЗ-2115 перед соблюдение �уд �� ∆�SП = (S ∆�уд + lx.) П , неравенства � �� �является (4) ��,� ��,�� � , ��,���,���,� ∙ ��,� �� �,���,�� �а15,5 = 28,8 м. � уд Sуд = + � �� � � ∆S��″62,1 = 13,3 + (7)(1) � � ∆ < SПП, � (17) � � П � � � � ∆ ∆� �а �уд � �,� уд � ��,� � �� П �∆ расположения �а�� ∆ � , в момент его (5)(2) где SП″ – расстояние от�,�� пешехода ,3)���уда;�+���� � �,� x)���,�� П ,� а SОSместа =П (t=1(S +�уд t2�++∙��lуд 0,5t (8) �а �,� �� ∙ �а обнаружения водителем до положения, занимаемого пешеходом в �уд ��,���,� � �,� ∙ ��,� �уд ���уд ∆�26,7 ∙ Sуд ∆− = 0. (6) �62,1 � �− ��� а� � ��,� момент проезда ВАЗ-2115; –. расстояние (9)(3) �автомобиля , + 21,0 ��,���,���,� ∙S��,� ��уд= �,���,�� П= 38,9 м. (0,8 + 0,1 + ∆0,5 ∙ 0,35) + 17,9 SО = безопасного � � �� � � �� � ∆ � � � уд � ∙П�,� � а �� � �,� � в � от места расположения пешехода момент его обнаружения водите��,� ��,�� уд �,� � � ��,���,� �,� S = + � � � 62,1 ∙=��,� 13,3 + ��,� 15,5 = 28,8 м. (7) уд � ; � ∙ �пн ∙ ��пн � лем до полосы движения автомобиля ВАЗ-2115. � 26 ∙ 10,1 ∙ 6,6 =уд.41,6 км/ч. (13)(4) VНуд= �26 ���,�� �,� ∙ � �,�� √ ��уд ��,���,���,� ∙ ��,� �,���,�� � Время движения безопасное для пеше�а на������,� � � �� автомобиля�ВАЗ-2115 −��,� ∙ S+уда− ,62,1==1,85 0. с. � 1�,� t2 ++уд0,5t ) 0,35 + (8) уд(t Taн = t1 + t2 + 0,5t3 + � нS= 0,8 ++0,1 0,5 ∙ (14) О �= 326,7 �,� определим ∙ �а ∙ �,� по формуле � ;�� �,� (5) �� хода расстояние�,� за ∙линию его следования SО = �,� ∙ �уд ���,�� �,�� �,���,� ��,�� �,� ��,� ��� � � Т''а =+ (S LSa1уд− lx)− 26,7 −62,1 1,0) = 1,94 с, м.= +=�(29,3 13,3 15,5 (0,8 0,1 ∙�=0,35) +� уд +−�4,0 =�17,9 += 21,0 =+ 38,9 уд + 0,5 �а �,� ∙ S уд � ��� ∙ �,�62,1 = 0. �� 28,8 м.(6) (9) (18)(18) (1 (2 (3 (4 (5 (6 (7 �� П4,0 м; l –�,� �а� где La1 –Vдлина ВАЗ-2115, L�a1∙ √ = расстояние удара(13) а от места ∙ �S'' ∙ =�пнТ'' 26S=О∙ 1,94 10,1 ∙ 6,6 41,6 ==2,91 м.�км/ч. (19) ��,�� Н = �26��,� а пнП� = (tx1 ∙+ t13,3 +28,8 , (8 2 + 0,5t 3) �,� � �,� S = + � � 62,1 = + 15,5 = м. (7) �,� �� ∙ � уд а пешехода боковой частью до передней части автомобиля ВАЗ-2115, � � �� ��н �����,� �уд ��� �∆= ∆�0,1 + 0,5 ∙ 0,35 � � 0,8 + Taн =l t1=+1,0 t2 +м; 0,5t = 1,85 с. (14) ��,�+ �,���∙ ��,� V3a + – �,� автомобиля ВАЗ-2115, 60 км/ч � ,0,5 ∙ 0,35) (20) м. ∙ �(0,8 x �а + �а Va==17,9 � = + 0,1 + + 21,0или = 38,9 (9 SО�скорость �∆ � �∆ � � П (t1� + t2 + 0,5t3�,� S = ) + , (8) �� ∙ �,� О 16,7 м/с. �,� �� ∙ � �,� �,� а �,� �,� Т''а = (S��,���,���,� = (29,3 +��,� 4,0 − 1,0) = 1,94 с, (18) уд + La1 − lx) ��; ∙ 6,6 = 41,6 км/ч.(21) Путь, пройденный Та∙″,10,1 � �а ∙ �пн , или ∙ за �пнвремя � 26 (13 VН =пешеходом �26 ��,� ���√� ��,� ��,� �,����,� � �,�� � П П + = 17,9 + 21,0 = 38,9 м. (9) SО = (0,8 + 0,1 + 0,5 ∙ 0,35) � �,� �� ∙ �,� П �∙� ��н = 1,94 ∙ �����,� (19) Т'' (19) П =3(S 29,6 2,5)==0,8 3,65; (22)с. Taн = t1 + t2 +S'' 0,5t +Па − + �,� 0,1=+2,91 0,5 ∙м. 0,35 + = 1,85 (14 �,��,� ∙ �� �,� ∙ �,� (13) VН = �26 ∙ �пн ∙ �пн � √26 ∙ 10,1 ∙ 6,6 = 41,6 км/ч. �удот ��места ∆ � �∆� расположения м.�,� Расстояние пешехода в момент его �,� обна�(Sуд�S+П,L=a12,62 (20) = − lx) = (29,3�����,� + 4,0 − 1,0) = 1,94 с, (18 �Т'' �� а � н � �∆ � � �до полосы П �∆� � ��с. из (14) T = t + t + 0,5t + = 0,8 + 0,1 + 0,5 ∙ 0,35 + = 1,85 а ружения водителем движения автомобиля определим 1 2 следует, 3 Из aнрасчета что сформулированное выше условие возможного �,� ∙ �� �,� ∙ �,� ��,���,���,� на рисунке, �,� �,� �П �,�с её помощью схемы, представленной и��,� составленного � �,� (21) S'',Пили = Т'' 1,94; ∙�,�ВАЗ-2115 = 2,91 м. перед (19 а∙ �= безопасного проезда незаторможенного автомобиля ��,� ��,� �,����,� � �,�� � П П �,� �,�= 1,94 с, (18) уравненияТ''а = (Sуд + La1 − lx) �а = (29,3 + 4,0 − 1,0) �� ��2,5) �∆так � = 3,65; 29,6 (S�уд (22) как∆�S'',П�,�= 2,91 м > SП = 2,62 м. пешеходом (17) S''П < SП не выполняется, П−� �П � (20 (20) S''П = �Т'' = �1,94 = 2,91 м. (19) � �∆ П �∆�∙ а ∙� SП =�,� 2,62 м. �,�ВАЗ-2115 без торможения 4.2. Вывод: при условии движения автомобиля ��,���,���,� �,� где Sуд = 29,3 м; а�худ= аy =∆�1,15 м; Δх�,� = 1 ,м; Δy ��,� = 2,5 ��1,8 �∆м; � или � м. возможного ; (21 расчета следует, что� сформулированное условие наезд Из на пешехода был бы неизбежен. ��,����,� , � �П ��,�выше (20) �,�� �П ��,� �� �∆� значения �П �∆� в уравнение (20), находим SП: Подставив принятые 29,6 (SПавтомобиля −��,� 2,5) = 3,65; (22 безопасного проезда незаторможенного перед ��,���,���,� �,� �,� ВАЗ-2115 (21) (21) � , или � ; ��,� �,����,� �П ��,� �,�� � П м.м > S = 2,62 м. = =2,62 2,91 пешеходом (17) S''П < SП не выполняется, так ПП П 106 как SS'' 29,6 (S − 2,5) = 3,65; 29,6 (S − 2,5) = 3,65; (22) (22) П П автомобиля что сформулированное условие возможног 4.2. Вывод: Из прирасчета условииследует, движения ВАЗ-2115 выше без торможения SПS=П 2,62 м. м. = 2,62 безопасного автомобиля ВАЗ-2115 пере наезд на пешехода был бы проезда неизбежен.незаторможенного Из пешеходом расчета следует, выше условие возможного < SПсформулированное не— выполняется, так как S'' (17) S''Пчто П = 2,91 м > SП = 2,62 м. 106 — безопасного 4.2. проезда автомобиля перед Вывод:незаторможенного при условии106 движения автомобиляВАЗ-2115 ВАЗ-2115 без торможени так как S''П = 2,91 м > SП = 2,62 м. пешеходом (17)наS''пешехода П < SП не выполняется, наезд был бы неизбежен. Из расчета следует, что сформулированное выше условие (17) возможного безопасного проезда незаторможенного автомобиля ВАЗ-2115 перед пешеходом SП″ < SП не выполняется, так как SП″ = 2,91 м > SП = 2,62 м. 4.2. Вывод: при условии движения автомобиля ВАЗ-2115 без торможения наезд на пешехода был бы неизбежен. По 5-му вопросу 5.1. В данной дорожной обстановке пешеход Рожко С.К. должен был руководствоваться требованиями следующих пунктов ПДД РФ: «4.3. Пешеходы должны переходить дорогу по пешеходным переходам, в том числе подземным и надземным, а при их отсутствии – на перекрестках по линии тротуаров или обочин. <…> При отсутствии в зоне видимости перехода или перекрестка разрешается переходить дорогу под прямым углом к краю проезжей части на участках без разделительной полосы и ограждений там, где она хорошо просматривается в обе стороны. <…> 4.5. На нерегулируемых пешеходных переходах пешеходы могут выходить на проезжую часть (трамвайные пути) после того, как оценят расстояние до приближающихся транспортных средств, их скорость и убедятся, что переход для них будет безопасен. При переходе дороги вне пешеходного перехода пешеходы, кроме того, не должны создавать помех для движения транспортных средств и выходить из-за стоящего транспортного средства или иного препятствия, ограничивающего обзорность, не убедившись в отсутствии приближающихся транспортных средств». Поскольку в данной ДТС была создана помеха для движения автомобиля ВАЗ-2115 и водитель был вынужден прибегнуть к экстренному торможению, действия пешехода противоречили требованиям п. 4.3 и 4.5 ПДД РФ. 5.2. В данной дорожной обстановке водитель автомобиля ВАЗ2115 Иванов И.И. должен был руководствоваться требованиями следующих пунктов ПДД РФ: «10.1. Водитель должен вести транспортное средство со скоростью, не превышающей установленного ограничения, учитывая при этом интенсивность движения, особенности и состояние транспорт— 107 — ного средства и груза, дорожные и метеорологические условия, в частности видимость в направлении движения. <…> При возникновении опасности для движения, которую водитель в состоянии обнаружить, он должен принять возможные меры к снижению скорости вплоть до остановки транспортного средства. 10.2. В населенных пунктах разрешается движение транспортных средств со скоростью не более 60 км/ч…». Поскольку водитель Иванов И.И. двигался со скоростью, не превышающей установленных ограничений, своевременно применил экстренное торможение и не располагал технической возможностью предотвратить наезд на пешехода, его действия не противоречат требованиям п. 10.1 и 10.2 ПДД РФ. ВЫВОДЫ 1. Удаление автомобиля ВАЗ-2115 от места наезда в момент появления пешехода в поле обзорности с места водителя составило примерно 28,8 м. 2. Водитель автомобиля ВАЗ-2115 не мог остановить автомобиль до линии следования пешехода и избежать наезда, даже если бы он принял меры к экстренному торможению в момент обнаружения пешехода из-за неподвижного препятствия. 3. При условии применения экстренного торможения автомобиль ВАЗ-2115 приблизился бы к пешеходу раньше, чем тот успел бы покинуть полосу движения автомобиля. 4. При условии движения автомобиля ВАЗ-2115 без торможения наезд на пешехода был бы неизбежен. 5. В данной дорожной обстановке пешеход Рожко С.К. должен был руководствоваться требованиями пунктов 4.3 и 4.5 ПДД РФ. Его действия требованиям этих пунктов Правил не соответствовали. Водитель Иванов И.И. в данной дорожной обстановке должен был руководствоваться требованиями пунктов 10.1 и 10.2 ПДД РФ. Его действия требованиям этих пунктов Правил не противоречили. — 108 — 5.3. Исследование наезда транспортного средства на пешехода при обзорности, ограниченной движущимся препятствием 5.3.1. Наезд на пешехода при обзорности, ограниченной движущимся попутно препятствием Основанием для проведения экспертного исследования является постановление следователя СУ при Управлении МВД России по г. Тольятти, майора полиции Григорьева Г.Г. от 20 февраля 2017 года о назначении автотехнической экспертизы по материалам уголовного дела № 101/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ. ПОСТАНОВЛЕНИЕ о назначении автотехнической экспертизы г. Тольятти 20 февраля 2017 г. Следователь СУ при Управлении МВД России по г. Тольятти, майор полиции Григорьев Г.Г., рассмотрев материалы уголовного дела № 101/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ, УСТАНОВИЛ: 02 января 2017 г. в 14 час 25 мин при следовании по ул. Параллельной со стороны Бульварного проспекта в направлении ул. Светлой г. Тольятти водитель Кузнецов К.К., управляя технически исправным автомобилем ВАЗ-2107, совершил наезд на пешехода Рогозу Р.Р., причинив ему тяжкие телесные повреждения. Автомобиль ВАЗ-2107 с полной нагрузкой двигался во втором ряду с постоянной скоростью 50 км/ч (13,9 м/с) на расстоянии 10,0 метров от правого края проезжей части. Дорожные условия на момент ДТП: сухой асфальт; профиль дороги горизонтальный; ширина проезжей части 24 метра; движение двустороннее. Видимость в направлении движения ТС более 300 метров; обзорность с места водителя по направлению движения пешехода ограничена движущимся справа впереди со скоростью 40 км/ч (11,1 м/с) автомобилем ВАЗ-2190. Боковой интервал между ТС составлял 2 м. Наезд произошел правой передней частью ТС. Пешеход – мужчина в возрасте — 109 — 50 лет – пересекал проезжую часть в поперечном направлении справа налево по ходу движения ТС со скоростью 7,0 км/ч (1,95 м/с). Пересечение полосы движения ВАЗ-2190 закончил на расстоянии 3 м от передней части ВАЗ-2107. Наезд произошел на расстоянии 10 метров от правого края проезжей части. Опасность для движения водителя возникла в момент выхода пешехода впереди автомобиля ВАЗ-2190 в поле обзорности с места водителя автомобиля ВАЗ-2107. На основании изложенного и руководствуясь ст. 195 (196) и 199 УПК РФ, ПОСТАНОВИЛ: 1. Назначить по настоящему делу автотехническую экспертизу, производство которой поручить ЭКЦ ГУ МВД России по Самарской области. 2. На разрешение эксперта поставить следующие вопросы: 1) ограничивал ли автомобиль ВАЗ-2190 обзорность с места водителя автомобиля ВАЗ-2107 в момент выхода пешехода на проезжую часть; 2) определить удаление автомобиля ВАЗ-2107 от места наезда в момент появления пешехода в зоне обзорности водителя; 3) определить, имел ли водитель автомобиля ВАЗ-2107 техническую возможность избежать наезда на пешехода путем экстренного торможения; 4) какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ. 3. Руководителю ЭКЦ разъяснить эксперту его права и обязанности по ст. 57 УПК РФ и предупредить его об уголовной ответственности по ст. 307 УК РФ. Следователь _____________________________ Григорьев Г.Г. — 110 — ЗАКЛЮЧЕНИЕ ЭКСПЕРТА по уголовному делу № 101/2017 о наезде автомобиля ВАЗ-2107 под управлением Кузнецова К.К. на пешехода 20 марта 2017 г. г. Тольятти ВВОДНАЯ ЧАСТЬ 01 марта 2017 г. в ЭКЦ ГУ МВД России по Самарской области при постановлении майора полиции Григорьева Г.Г. поступили материалы уголовного дела № 101/2017 о наезде автомобиля ВАЗ-2107 под управлением Кузнецова К.К. на пешехода Рогозу Р.Р. для проведения автотехнической экспертизы. На разрешение эксперта поставлены следующие вопросы: 1. Ограничивал ли автомобиль ВАЗ-2190 обзорность с места водителя автомобиля ВАЗ-2107 в момент выхода пешехода на проезжую часть? 2. Определить удаление автомобиля ВАЗ-2107 от места наезда в момент появления пешехода в зоне обзорности водителя. 3. Определить, имел ли водитель автомобиля ВАЗ-2107 техническую возможность избежать наезда на пешехода путем экстренного торможения. 4. Какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ? Проведение экспертизы поручено эксперту Сидорову С.С., имеющему среднее профессиональное автотехническое образование. ПОДПИСКА Мне, эксперту Сидорову С.С., разъяснены права и обязанности эксперта, предусмотренные ст. 57 УПК РФ. Об уголовной ответственности за дачу заведомо ложного заключения по ст. 307 УК РФ предупрежден. Эксперт ______________ Сидоров С.С. — 111 — ИСХОДНЫЕ ДАННЫЕ К ЭКСПЕРТНОМУ ИССЛЕДОВАНИЮ ДТП 1. Обстоятельства ДТП: 02 января 2017 г. в 14 час 25 мин при следовании по ул. Параллельной со стороны Бульварного проспекта в направлении ул. Светлой г. Тольятти водитель Кузнецов К.К., управляя технически исправным автомобилем ВАЗ-2107, совершил наезд на пешехода Рогозу Р.Р., причинив ему тяжкие телесные повреждения. 2. Дорожные условия: состояние дорожного покрытия – сухой асфальт; ширина проезжей части 24 метра для двустороннего движения; профиль дороги горизонтальный. 3. Наличие следов транспортного средства: следы торможения отсутствуют. 4. Расположение места наезда на пешехода: место наезда расположено на расстоянии 10,0 метров от правого края проезжей части по ходу движения автомобиля ВАЗ-2107. 5. Условия видимости: видимость в направлении движения более 300 метров. 6. Скорость движения транспорта: автомобиль ВАЗ-2107 двигался по левой полосе проезжей части ул. Параллельной со стороны проспекта Бульварный в направлении ул. Светлая на расстоянии 10 м от правого края проезжей части с постоянной скоростью 50 км/ч; автомобиль ВАЗ-2190 двигался со скоростью 40 км/ч правее и впереди автомобиля ВАЗ-2107. 7. Степень загруженности транспорта: автомобиль ВАЗ-2107 с полной нагрузкой. 8. Техническое состояние транспорта: автомобиль ВАЗ-2107 технически исправен. 9. Возраст и пол пешехода: мужчина в возрасте 50 лет. 10. Направление движения пешехода по отношению к ТС (справа, слева, попутное, встречное): пешеход пересекал проезжую часть в поперечном направлении справа налево по ходу движения автомобиля ВАЗ-2107. 11. Темп движения и (или) скорость движения пешехода: пешеход двигался со скоростью 7,0 км/ч. 12. Расстояние от препятствия, ограничивающего обзорность с места водителя, до пешехода, вышедшего на проезжую часть: пешеход — 112 — закончил пересечение полосы движения автомобиля ВАЗ-2190 в 3 метрах от его передней части. 13. Боковой интервал между ТС, совершившим наезд, и препятствием, ограничивающим обзорность с места водителя: боковой интервал между автомобилями ВАЗ-2190 и ВАЗ-2107 составлял 2,0 метра. 14. Условия обзорности пешехода с места водителя (неограниченная, ограниченная условиями видимости, неподвижным объектом, попутным или встречным): обзорность с места водителя ограничена движущимся впереди и справа от автомобиля ВАЗ-2107 автомобилем ВАЗ-2190. 15. Какой частью ТС произошел наезд на пешехода (передней частью, боковой частью): наезд произошел правой передней угловой частью автомобиля ВАЗ-2107. 16. На каком расстоянии от передней (при наезде боковой частью) или от боковой (при наезде передней частью) находится точка контакта с пешеходом: на расстоянии 1 метр от передней части. 17. Какой момент принять за момент возникновения опасности для движения водителя: за момент возникновения опасности для движения водителя автомобиля ВАЗ-2107 принять момент выхода пешехода в поле его зрения из-за движущегося впереди и справа автомобиля ВАЗ-2190. 18. Схема ДТП приведена на рисунке. ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ: ах = 1,90 м – расстояние от места водителя до передней части ВАЗ2107; ay = 1,10 м – расстояние от места водителя до правой боковой части ВАЗ-2107; Ba1 = 1,65 м – ширина автомобиля ВАЗ-2107; Ba2 = 1,68 м – ширина ВАЗ-2190; La1 = 4,2 м – длина ВАЗ-2107; Δx = 3,0 м – расстояние от линии движения пешехода до ВАЗ-2190 в момент выхода пешехода из его полосы движения. — 113 — а) Ул. Параллельная Sa1 ах Va1 IА• аy Δy Е B 2 I' III 1 Va2 Sa2 б) ×3 D III'' C, II'' VП I'' SП Ул. Параллельная Sуд ах II А'• а y Δy Va1 Е' 2 II' B' Va2 III Δ'х ×3 D' III'' C', II'' VП I'' SП S'П Рис. 1. 1. Схемы к определению ширины зоны обзорности пешехода с места Рисунок Схемы к определению ширины зоны обзорности пешехода с водителя, места водителя, ограниченной движущимся попутно препятствием ограниченной движущимся попутно препятствием (а), и удаления(а), ТС и удаления ТС от места наезда в момент наступления обзорности от места наезда в момент наступления обзорности пешехода, не ограниченной пешехода, не ограниченной движущимся попутно препятствием (б): попутно препятствием (б): 1 – ВАЗ-2107; 2 –выхода ВАЗ-2190; I – ВАЗ1движущимся – ВАЗ-2107; 2 – ВАЗ-2190; I – ВАЗ-2107 в момент пешехода на2107 проезжую часть; II – ВАЗ-2107 в момент появления пешехода в зоне в момент выхода пешехода на проезжую часть; II – ВАЗ-2107 в момент обзорности водителя; III – ВАЗ-2107 в момент наезда на пешехода; появления пешехода в зоне обзорности водителя; III – ВАЗ-2107 в момент I′ – ВАЗ-2190 в момент выхода пешехода на проезжую часть; на пешехода; I' –появления ВАЗ-2190 впешехода момент выхода пешехода на проезжую II′ –наезда ВАЗ-2190 в момент в зоне обзорности водителя ВАЗ-2107; I″ – пешеход в момент выхода на проезжую часть; часть; II' – ВАЗ-2190 в момент появления пешехода в зоне обзорности водителя II″ – пешеход в момент его появления в зоне обзорности водителя ВАЗ-2107; I'' III″ – пешеход в момент выхода на части проезжую часть; II'' пешеход в ВАЗ-2107; – пешеход на проезжей в момент его– выхода из полосы движения ВАЗ-2190; 3 (×) – место наезда 114 — 114 — ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА 1. Иларионов, В.А. Экспертиза дорожно-транспортных происшествий : учебник для вузов / В.А. Иларионов. – М. : Транспорт, 2013. – 255 с. 2. Суворов, Ю.Б. Судебная дорожно-транспортная экспертиза. Судебно-экспертная оценка действий водителей и других лиц, ответственных за обеспечение безопасности дорожного движения, на участках ДТП : учебное пособие / Ю.Б. Суворов. – М. : Экзамен : Право и закон, 2004. – 208 с. 3. Домке, Э.Р. Расследование и экспертиза дорожно-транспортных происшествий : учебник для студ. высш. учеб. заведений / Э.Р. Домке. – 2-е изд., стер. – М. : Академия, 2012. – 288 с. 4. Инструкция по организации производства судебных экспертиз в государственных судебно-экспертных учреждениях системы Министерства юстиции Российской Федерации. Утверждена Приказом Министерства юстиции Российской Федерации от 20 декабря 2002 № 347. – URL: ceur.ru/library/docs/departmental_ requlations/item 132780. ИССЛЕДОВАНИЕ По 1-му вопросу 1.1. Определим, ограничивал ли автомобиль ВАЗ-2190 обзорность с места водителя автомобиля ВАЗ-2107 в момент выхода пешехода на проезжую часть, для чего проведем следующие расчеты. Автомобиль ВАЗ-2190 не ограничивал обзорность водителю автомобиля ВАЗ-2107 в момент выхода пешехода на проезжую часть, если выполняется условие (Bобз − аy) ≥ SП, (1) где Bобз – ширина обзорности с места водителя автомобиля ВАЗ-2107, ограниченной передним левым углом автомобиля ВАЗ-2190, находящегося справа от автомобиля ВАЗ-2107 в момент выхода пешехода на проезжую часть; ay – расстояние от места водителя до правой боковой части автомобиля ВАЗ-2107, ay = 1,1 м; SП – путь, пройденный пешеходом от края проезжей части до места наезда, SП = 10,0 м. Для определения ширины обзорности Bобз с места водителя автомобиля ВАЗ-2107 определим удаление автомобилей ВАЗ-2107 — 115 — (Sa1) и ВАЗ-2190 (Sa2) от линии следования пешехода в момент его выхода на проезжую часть (см. рис. 1, а). Удаление автомобиля ВАЗ-2107 от места наезда в момент выхода пешехода на проезжую часть Sa1 = SП ∙ �а� �П = 10,0 ∙ ���� ���� = 71,3 м. �П �∆� из ���� Время движения Т' пешехода � положения = 4,10 с,I″ (положение в мо- (2) П= �П ���� мент выхода на проезжую часть) в положение III″ (положение в мо�а� ���� Sa1 = Sдвижения = 71,3 м. �� ∙ П ∙ �� = 10,0 мент выхода из полосы �П � ВАЗ-2190) ���� ; �� �� �П �∆� ���� �удП�� (2) (2) Т' =���а� ��а���� = 4,10 с, �П � ���� , (4) ∆� ��� �обз �� �� где Δy – боковой интервал между автомобилями ВАЗ-2107 и ВАЗ; ��а� ��� ��∆� ��� � � ����������������� ����� �� � �� � = 9,3пешехода м. (5) 2190, Δy =Bобз 2,0=м; �оно же расстояние между положением �� �� ���� ������������� а� � � ��а��� �а� ��� уд � а� III″ (положение в момент выхода из полосы движения ВАЗ-2190) и (4) , � � �П∆ �� � ��� ��обз � �� � �� �П � , (6) местом наезда. � ��� �уд ��� ���� ��а� ��� ��∆уд ����������������� ����� � ��� � Удаление от линии следования � � = 9,3пешехода м. (5) Bобз =автомобиля ВАЗ-2190 � �а� ��� ��а� S'П = �� � ������������� �уд � П ,часть ���� (7) в момент выхода пешехода наа�проезжую �а� �� ��� �П ��� �� � П Sa2 = (Va2 ∙ Т�П′)�� + Δx � = �(11,1 ∙ �4,10) + 3,0 = 48,5 м, (3) (6) �, а� ��� �� уд = �� � �. S'a2 (9) а� �уд�уд � �а� где Δx – расстояние от линии движения �П пешехода до передней части �а� S'вП�� = �� , П � �уд � �П ��� ���а� автомобиля ВАЗ-2190 момент выхода из его полосы дви- (7) �а�пешехода уд �� ∆� ��� а� � �а���а� . (10) � жения, Δx = 3,0 м. �уд ��� � �� а� �� �� � S'a2 = ��а� � �удуд ��а�а�. а��а� а� � (9) �а� водителя Ширину обзорности Bобз с �места ���� автомобиля ВАЗ-2107, ���� а� ����������������� = 71,3 м. Sa1 = SП�П∙уд�����= 10,0 ∙ ���� ������� ограниченной�передним левым�Пуглом ВАЗ-2190, .находя-(11) � автомобиля П ��� ���а� ��уд �� ∆� ��� ���� �������� �уд ����� а� � ����� ��������� �уд (10) ���� . ���� �а� выхода �� щегося справа от автомобиля ВАЗ-2107 ва�момент �П �∆�� �а����� �уд ��� �� ��а� ��� пешехода на уд� � Т'П = =а�4,10 (2) �а� с, а� �П ���� проезжую часть, определим треугольников (см. рис. 1, а): �� ����� из подобия ���� = +� �уд�� ����� = 27 + 30,3 = 57,3 м. Sуд����������������� � �� �� ���� �� � � � ���� ; ;�������� ������� . (11) ���� �� �уд ����� �� � �� �уд � ����� ����� ���� ��������� �0,5t ���� а� , а�� ��) SО =S(ta11 =+�St��2�Пуд�� +∙�� ∙ а��∙� (13) а� а� �� �= 71,3 м. �� =3�� 10,0 � �� ����∙� ��� ����� � ,а� , (4) � �П � (4 �� ����∆ �обз (4) � ��� �� обз � ����� = 27 + 30,3 = 57,3 м. Sуд = + � ∆� �� � �� � �П �∆���� � ��∆ �� �� + 0,1 + �� 0,5 ∙места 0,35) ∙ ��� �+���� = 14,9 = 29,5 м. (14) ����������������� ����� а�Т' = 4,10 с, +�14,6 (2) (5) П� = � водителя где�Оах=–(0,8 расстояние передней части �� ∙ до ��� =ВАЗ-2107, 9,3 м. �П ����� ���� обз = от � �а� где ах – расстояние отBместа водителя до части ����ВАЗ-2107, ах = 1,90 м ������������� �а� ��� ��а� а�передней (t1 + St2 +=�� 0,5t ∙м и �Sводителя , О =расстояние = 1,90 из м; сравнения ayS– от3)�� места правойчто боковой 57,3 = а29,5 мдоследует, Sуд >(13) SО , 3.2.ахВывод: ��∙� уд �П� ��� ; ��О�� �П ��� �� � �� части от ВАЗ-2107, ay = 1,10 м;�� Δy –правой боковой интервал между ВАЗ-2107 места водителя до боковой части ВАЗ-2107, ay = 1,1 ay – расстояние � , (6) � �уд ������ �уд�� ��� ���� что указывает на + наличие у�∙ 0,35) водителя технической � +2,0 0,5м. +автомобиля = 14,9ВАЗ-2107 + 14,6 = 29,5 м. (14) �О = (0,8 �� уд ��� ��∙а���� � и ВАЗ-2190, Δ0,1 = а� � y � �� ∙и��� , ВАЗ-2190, м; Δвозможности между ВАЗ-2107 Δyсвоевременного = 2,0 м. (4) �П y – боковой интервал ∆� �� наезд на �пешехода � обз Изпредотвратить уравнения (4) следует: S' , путем П = ��а� � �уд � м следует, что Sуд > SО, (7) 3.2. Вывод: из сравнения Sуд = 57,3 м и SО =�а�29,5 ��а� ��� ��∆� ��� � ����������������� ����� Из уравнения (4) =следует: экстренного торможения. (5) (5) � автомобиля � = 9,3технической м. � что указывает наBобз наличие у ��� водителя ���� �а� �� S'а�a2 = ��а�������������� � �уд � а�. ВАЗ-2107 (9) ���� ��� ��∆� ��� � �а� ����������������� ����� �Пнаезд ��� ��П�—на ��� возможности предотвратить путем �своевременного �— Bобз = ��пешехода = 9,3 м. (5 �116 П , ∆ �� (6) �� ���� ������������� � � �� ��� �� ��уд �� П � � � �� а� �� По 4-му вопросу �уд ��� ���� �а� � � уд ��� � �а���а� . (10) экстренного торможения. � �уд ��� �уд� ��а� а� ��а� ��� � П �а� В 4.1. данной ситуации, чтобы автомобиль ВАЗ-2190 не ограничива В данной дорожной обстановке пешеход Рогоза Р.Р. должен был а� S'П = ��а� � �уд � , (7) В данной ситуации, чтобы автомобиль ВАЗ-2190 не ограничивал обзорность с места водителя ВАЗ-2107, должно выполняться условие (Bобз − аy) ≥ SП. В рассматриваемом ДТП разница (Bобз − аy) = 9,3 − 1,1 = 8,2 м, что меньше SП = 10 м, т. е. (Bобз − аy) < SП. � ���� 1.2. Вывод: в данной ситуации автомобиль ВАЗ-2190 SП ∙ а� = 10,0 ∙ = 71,3 м. Sa1 = дорожной �П ���� ограничивал видимость пешехода с ���� места водителя ВАЗ-2107 �а� ∙ = 71,3 м. Sa1 = SП ∙ �П �∆=� 10,0���� ���� Т'П = �П часть. � = 4,10 с, в момент его выхода на проезжую �П ���� �П �∆� ���� �� �� Т' = � = 4,10 с, По 2-му вопросу П �П� ;���� �� �� 2.1. Определим удаление автомобиля ВАЗ-2107 от места наезда �� �� �уд ��� ��а�� �а� ��� в момент появления пешехода водителя Sуд, когда ��� ;обзорности , ��в зоне ∆� ��� �обз водитель автомобиля ВАЗ-2107 мог �увидеть пешехода (рис. 1, б). �уд ��� ��а� �� а� � , ��а� ��� ��∆� ��� � ������������������ ����� ∆ �� � Из подобия треугольников A′C′D′ и A′B′E′ (см. рис. 1, б) имеем � � � обз Bобз = � = 9,3 м. ���� ������������� �а� ��� ��а� соотношение ��а� ��� ��∆� ��� � ����������������� ����� �� � = 9,3 м. Bобз = �П �� �� ��� � ��П ���� �а� �� � ��а� � ������������� , (6) � � �� � �� �� уд �� уд � � �� ��� П ��� ��П где SП′ – расстояние, �пройденное из положения I″ � пешеходом �П � , � �� � ���� �� уд= �� � а� � уд S' � , � П уд в положение II’, �а� (2) (2) (4) (4) (5) (5) (6) (6) (7) � �а� П �а� S'ПSП=∙�� �уд �∙ ���� , = 71,3 м. 10,0 Sa1 = (7) (7) а�=� �а� . S'a2�=а� �� ����� (9) �П а� � �уд ���� � =а�71,3 м. Sa1 = SП ∙ = 10,0 ∙ � ���� �����а� П��∆ � где Sa1 – удаление автомобиля ВАЗ-2107 от. места наезда в момент (9) S' =П ��� П � Т'а�a2 ��уд � �= 4,10 с, (2) П��уд � а� �П ��� ��� а� ∆� ��� � � ���� � �∆ ���� а� П П � выхода пешехода на проезжую 71,3с,м;� Δх′ – расстояние от (2) . (10) Т'�уд = � �часть, �� � S�a1а� ==�� 4,10 П �� а� а� ��а� ��а� ��� �П��П �� ���� уд � �а� а� ∆� �� П ��� ���а� �� уд �� линии движения�пешехода до передней автомобиля ВАЗ-2190 � ; части а�� � . (10) �� �� �� ������ �а� ��а� �а� �уд ��� � в �зоне ��а� ������� �� ��� водителя в момент появления пешехода с а�места ; �уд обзорности ����������������� уд ���� �а� �а� ��� ��а� �� �а� �уд �� ����,�������� . (11) ���� � (4) ВАЗ-2107, ����� ��������� ���� � �уд уд ����� ∆ �уд��� ���� ���� � �� � �� а�� уд ��а� �� ����������������� �обз ������� ���� � , (4) . (8) (11) Δ ′ = S − S� ′, ����� ��а� ��∆ �����∆ ����� � х �� � �обз a2 ���� �������� a2 ����������������� ���������� ��������� � уд ���� уд ���� � �= ���� м. (5) BобзSуд= = �� + � ����� = 27 + 30,3 57,3=м.9,3 ��а� �����а� ��∆ �� ��� ���� ������������� �� � ������������������ где Sa2 – расстояние от ВАЗ-2190 до линии следования пешехода ����� �� �а� � � = 9,3 м. (5) Bобз = ����� � ������������� �� �а��� а� в момент его выхода на проезжую часть, S +�=30,3 48,5���� Sa2′м. – расстоя� �� �� � +��� �П ����� = 27 =м;57,3 Sуд = П ��� �� � �3) ∙ �а� � a2��а� , , (6) �+ � � S = (t + t 0,5t О 1 2 �� �� �П ����уд �� ���уд �� ние, пройденное автомобилем от выхода пеше- (13) � момента � � �� П � ВАЗ-2190 ��� ��∙� а � , (6) � � �� �уд �� ��появления � �а� ��П хода на проезжуюSОчасть до в зоне видимости (13) � а� , = (t�1удS' +��t2момента +�� 0,5t ) ∙его � ���� �� 3� = � � , (7) ��� ��∙� П а� уд а 14,9 + 14,6 = 29,5 м. = (0,8 + 0,1 + 0,5 ∙ 0,35) ∙ + = (14) � � О �П ∙ а� водителя ВАЗ-2107, ��� S'П = ��а� ����� �уд � �� ,����� (7) � � 0,1 + 0,5S'∙ a2 ∙а� � м + иа��S�Оа�=. =29,5 14,9м+ следует, 14,6 = 29,5 �О = (0,8 = =��57,3 чтом.(9) Sуд >(14) S(9) 3.2. Вывод: из +сравнения S0,35) уд О, �� ∙ ��� ��� �уд � �а� S'a2 = ��а� � �уд � а�. (9) что указывает наизналичие технической а� Подставляя (8), ву соотношение вида мавтомобиля и�(6), SО получим = 29,5 ВАЗ-2107 м уравнение следует, что Sуд > SО, 3.2. Вывод: сравнения Sводителя П уд = �57,3 �П ��(9) � ���а� ��уд �� ∆� ��� �П а� � . (10) �а� ��а� �а�путем �П ��� ���а� � возможности наезд на �уд пешехода �уд�� что указывает предотвратить на наличие у��уд водителя автомобиля ВАЗ-2107 технической ∆� �� �� ��а� ��� своевременного � �а� �а� � � а� а� (10) � �а���а� . (10) � �уд ��� ��а� а� ��а� ��� уд � экстренного торможения. �а� ���� возможности предотвратить наезд ��на пешехода путем своевременного а� ����������������� уд ���� ������� ���� � �������� . (11) ���� ����������������� �уд ����� уд экстренного торможения. ����� ��������� �уд ������� —����� 117 — ���� ���� � �������� . (11) ���� �уд ����� ����� ��������� �уд ���� ���� По 4-му вопросу � �� ���� Sуд = + � � � ����� = 27 + 30,3 = 57,3 м. � �а� , (4) �обз ∆ � �а�� , (1) �� � ∆� � ��а�S' = �� ��П � ∆. � (9) ��a2� ��∆ ����������������� ����� � �� а�� � �уд � а� � � = 9,3 м. (5) Bобз = �П ���� ������������� �а� ��� ��а� SП = (2) �П(Sуд + lx) , � ∆ �� �П ��� ���а� ��уд � � � �П ����а� ��П� ��а�� Подстановкой в уравнение (10) численных значений приходим � � � �а���а� , �а� . (10) (6) ��уд� ��� � ∆��� �� ∆� �а �� � ����а� ��а� ��� �уд �,а� к уравнению видауд а� � �� уд�уд��� (3) ∆� � �� �� �а �а� ���� уд � �� ��П � ∆� ���� = 10,0�П = S ∙ ∙ = 71,3 м. S a1 П ����������������� ���� S'П = уд������� , ������� (7) а��П� � уд∙���,� �уд ��,���,� �а� (11) � �,� . (11) (4) ���� �������� � . � ����� ����� ��������� � уд ��,���,���,� ���П �∆ �,���,�� � уд ���� ∙ ��,� ���� �а� = 4,10 с, = уд � �� ����� S'�a2Т'�=П�,� �� (9)(2) �П уд ���� . а� �а� Преобразованием уравнения (11) приходим к квадратному урав��,� уд �� ����� � ; = 57,3 м. (5) ���,�=∙ �� � ����� + 30,3 Sуд = + � �27 �,�� � уд ���,�� нению вида ��П ��� ����а� ��уд��а� П�� � �� ;���� ∆ �� � м. 10,0 ∙ =�71,3 Sa1 = S�П ∙ �а�= � . �П54 ∙ S∙ S + ���� �� � �62,1 а� = �удуд−– −191,6 0.а� (6) 0. (12)(10) � �� � уд��а� �а� ��= ��26,7 �� а� � ��а� ��� � ��а� а� �а� ,� а� SО = (t1 + удt2 +��0,5t ∙ а�уд��уд � (13) (4) 3) � , �П �∆ ���� ��� ��∙� а ∆ �� � � обз Из решения данного уравнения Т'П ��,�� =квадратного � = 4,10 с, находим значение(2) �� ���� ��,� �Пуд ���� � � = 13,3 + ������� � ����62,1 Sуд =����������������� + � � � 15,5 = 28,8появления м. (7) ���� �� �� ��∆ удаления автомобиля ВАЗ-2107 от места наезда в момент �� �� � ����������������� ����� � =�������� а� � � � �+ + 0,5 ∙�� 14,9 + 14,6 =��������� 29,5 м.. м. (14)(11)(5) �О = (0,8 + 0,1 �� �уд ����� =� ∙ 0,35) � ����� = 9,3 Bобз ����� � ���уд ���� ���� ��; ∙ ������������� ���� �� �� ���� � а� � а�водителя: пешехода в зоне обзорности �� �� �а �а� S = (t + ) + , � t2и+S0,5t = 57,3 м = м следует, что Sуд > SО, (8) 3.2. Вывод: из сравнения S О 1�� 329,5 уд О � � �� � �� П� ���а� П �а� ��� � � �� �уд �� ���� �,� � = 27 , �� =∙ �а57,3 м. Sуд = + � � ����� + 30,3 � , (4) (6) � ��уд���� автомобиля ∆� �� ��уд ��� ��� ВАЗ-2107 технической что указывает на наличие �у водителя ��,� обз ��� (0,8 + из 0,1 + 0,5 ∙ 0,35) расчетов + = 17,9 +что 21,0 = 38,9 м. SО =Вывод: � 2.2. следует, в момент появ- (9) П �� ∙ �,� ��а�проведенных �а�� �� ��� ��∆�S' ���=� ���,� ����������������� �����своевременного а� � � , возможности предотвратить наезд на пешехода путем П а� уд S = (t + t + 0,5t ) ∙ � , (13) � 3 ���водителя � = 9,3 ВАЗ-2107 м. (5) (7) Bобз = О в зоне 1 2 �а� ��∙� ления пешехода обзорности автомобиль ���� ������������� �а� ��� �� а а� = ∙ � ∙ � � 26 ∙ 10,1 ∙ 6,6 = 41,6 км/ч. (13) VН �26 пн пн √ экстренногонаходился торможения. � �около а� � расстоянии от места наезда на 57,5 метра. ���� � �� �П �� �� S' = � � . (9) �a2 � �� � П ��а� � + уд � ,�=а� 14,9�����,� + 14,6 = 29,5 м. (14) � = (0,8 + 0,1 +� 0,5 �� ∙ 0,35) ∙� (6) �� ∙ ��� ��� Taн = t1О+ t2 + 0,5t3 + � н �= 0,8 = 1,85 с. (14) �уд+ ��0,5 уд �� � + 0,1 � ��∙�0,35 + �,� ∙ �� �,� ∙ �,� По 3-му вопросу � �П ��� ��� � П м и � а� �� уд ∆� ��м = 57,3 S = 29,5 3.2. Вывод: из сравнения S � � следует, что Sуд > SО, уд О П а� По 4-му вопросу �,��у�� �,� 3.1. Исследование водителя .совершив(10) S'�Пналичия =��l��) а� , 4,0а�автомобиля, (7) �а� уд � ��+ а� �� Т''а = (Sуд + L = (29,3 − 1,0) =�� 1,94 с, (18) a1уд− x� � �� ��а� а� уд а� � �а �� �а� �а� что4.1. указывает на наличие у водителя автомобиля ВАЗ-2107 технической шего ДТП, технической возможности избежать наезда на пешехоВ данной дорожной обстановке пешеход Рогоза Р.Р. должен был �а� �П ����� �,� сравнением значений (9) S' = �� � � . да путем экстренного торможения проводим a2 ����������������� � а� уд уд = = Т''а ∙ на 1,94 ∙ ПДД = 2,91 (19) ������� возможности предотвратить пешехода путем ���� Пнаезд руководствоваться требованиямиS''следующих РФ:м.���� своевременного �,� пунктов �,� ��а� наезда . (11) �������� в момент удаления автомобиля ВАЗ-2107 от места появления �уд ����� ����� ��������� �уд �П ���� ���� экстренного торможения. �П��� ��уд � ∆� уд �� � �∆ � ��� а�� ∆� ��� путем. SО. пешехода в зоне обзорности � �а�Sуд�с, остановочным (20) (10) �а� ��а� �а� �� �∆ �П �∆ � � � ��� �� � �� ��а� �� ���� уд � уд � а� � Остановочный путь при торможении в данных дорожных усло� а� Sуд = + � � �����а�= 27 + 30,3 = 57,3 м. � 116 � ��,���,���,� �,� ��,� �,� � уд����� , или � ; (21) По виях 4-му вопросу ����������������� �,����,� �П ��,� �,�� � ������� � ��,� ���� �а��������� �а� П ���� � . (11) SО =�уд(t����� + t2 + 0,5t3) ∙пешеход , ������������� (13) (13)был ����� 1 обстановке уд � 4.1. В данной дорожной Р.Р. должен ���� ��∙�а Рогоза 29,6 (SП − 2,5) =���� 3,65; (22) � t – время срабатывания где t1 – время реакции водителя, t2,62 = 0,8 ��с; � руководствоваться требованиями следующих РФ: �� + 0,5 ���� SП∙ =���� м. 1 +пунктов 2= ПДД + 0,1 14,9 + 14,6 29,5 м. (14) �О = (0,8 � ∙ 0,35) + � ����� = 27 + 30,3 = 57,3 м. t= = S уд = �� ∙ ��� ��� тормозов, t2 = 0,1� с; t3 –� время нарастания замедления, 0,35 с; 3 Из расчета следует, что сформулированное выше условие возможного 2 Jа –Вывод: установившееся замедление, J�аа�= . м 6,6 и �Sа��м/с м следует, что Sуд > SО, 3.2. из сравнения Sуд = 57,3 О = 29,5 SО =незаторможенного (t1 + t2 + 0,5t3)значений ∙ � автомобиля , (13) безопасногоПрипроезда ВАЗ-2115 перед (13) получим ��� ��∙�в 116 а выражение что указывает подстановке на наличиепринятых у водителя автомобиля ВАЗ-2107 технической � S'' = 2,91 м > S = 2,62 м. как пешеходом (17) S''П < SП не выполняется, ���� так�� П П + 0,1 + 0,5 ∙ 0,35) ∙ + пешехода = 14,9 + путем 14,6 = 29,5 м. (14)(14) �О = (0,8 возможности предотвратить наезд на своевременного �� ∙ ��� ��� 4.2. Вывод: при условии движения автомобиля ВАЗ-2115 без торможения экстренного 3.2.торможения. Вывод: из сравнения S м =и 57,3 SО = 29,5 м следует, SО м =и 29,5 м следует, что Sудчто > SО , 3.2. Вывод: из сравнения Sуд = 57,3 наезд на пешехода был бы неизбежен. уд S > S , что указывает на наличие у водителя автомобиля ВАЗ-2107 уд Она наличие у водителя автомобиля ВАЗ-2107 технической что указывает технической возможности предотвратить наезд на пешехода путем По 4-му вопросу возможности предотвратить наезд торможения. на пешехода путем своевременного своевременного экстренного 106 4.1. торможения. В данной дорожной обстановке пешеход Рогоза Р.Р. должен был экстренного — 118 — руководствоваться требованиями следующих пунктов ПДД РФ: ∆���� �уд ���� ∆� По 4-му вопросу По 4-му вопросу 4.1. В данной дорожной обстановке пешеход Рогоза Р.Р. должен был руководствоваться требованиями следующих пунктов ПДД РФ: «4.3. Пешеходы должны переходить дорогу по пешеходным переходам, в том числе подземным и надземным, а при их отсутствии – на перекрестках по линии тротуаров или обочин. <…> При отсутствии в зоне видимости перехода или перекрестка разрешается переходить дорогу под прямым углом к краю проезжей части на участках без разделительной полосы и ограждений там, где она хорошо просматривается в обе стороны. <…> 4.5. На нерегулируемых пешеходных переходах пешеходы могут выходить на проезжую часть (трамвайные пути) после того, как оценят расстояние до приближающихся транспортных средств, их скорость и убедятся, что переход для них будет безопасен. При переходе дороги вне пешеходного перехода пешеходы, кроме того, не должны создавать помех для движения транспортных средств и выходить из-за стоящего транспортного средства или иного препятствия, ограничивающего обзорность, не убедившись в отсутствии приближающихся транспортных средств». Поскольку в данной ДТС была создана помеха для движения автомобиля ВАЗ-2107, вынуждающая водителя прибегнуть к экстренному торможению, действия пешехода противоречили требованиям п. 4.5 ПДД РФ. 4.2. В данной дорожной обстановке водитель автомобиля ВАЗ2107 Кузнецов К.К. должен был руководствоваться требованиями следующих пунктов ПДД РФ: «10.1. При возникновении опасности для движения, которую водитель в состоянии обнаружить, он должен принять возможные меры к снижению скорости вплоть до остановки транспортного средства. 10.2. В населенных пунктах разрешается движение транспортных средств со скоростью не более 60 км/ч». Поскольку водитель Кузнецов К.К. двигался со скоростью, не превышающей установленных ограничений, но имел техническую возможность предотвратить наезд на пешехода путем своевременного экстренного торможения, его действия находятся в противоречии с требованиями п. 10.1 и не противоречат требованиям п. 10.2 ПДД РФ. — 119 — ВЫВОДЫ 1. В данной дорожной ситуации автомобиль ВАЗ-2190 ограничивал видимость пешехода с места водителя ВАЗ-2107 в момент его выхода на проезжую часть. 2. В момент появления пешехода в зоне обзорности водителя автомобиль ВАЗ-2107 находился от места наезда на расстоянии около 57,5 метра. 3. Водитель автомобиля ВАЗ-2107 имел техническую возможность предотвратить наезд на пешехода путем своевременного экстренного торможения. 4. В данной дорожной обстановке пешеход Рогоза Р.Р. должен был руководствоваться требованиями пунктов 4.3 и 4.5 ПДД РФ. Его действия не соответствовали требованиям п. 4.5 ПДД РФ. Водитель автомобиля ВАЗ-2107 Кузнецов К.К. должен был руководствоваться требованиями пунктов 10.1 и 10.2 ПДД РФ. Его действия не соответствовали требованиям п. 10.1 ПДД РФ и не противоречили требованиям п. 10.2 ПДД РФ. 5.3.2. Наезд на пешехода при обзорности, ограниченной движущимся во встречном направлении препятствием Основанием для проведения экспертного исследования является постановление следователя СУ при Управлении МВД России по г. Тольятти, капитана полиции Петрова П.П. от 12 февраля 2017 года о назначении автотехнической экспертизы по материалам уголовного дела № 95/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ. ПОСТАНОВЛЕНИЕ о назначении автотехнической экспертизы г. Тольятти 12 февраля 2017 г. Следователь СУ при Управлении МВД России по г. Тольятти капитан полиции Петров П.П., рассмотрев материалы уголовного дела № 95/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ, УСТАНОВИЛ: 15 января 2017 г. в 12 час 35 мин при следовании по ул. Новозаводской со стороны ул. Ларина в направлении ул. Комсомольской — 120 — г. Тольятти водитель Сергеев С.С., управляя полностью груженым, технически исправным автомобилем ВАЗ-2109, совершил наезд на пешехода Бойко О.К., причинив ей тяжкие телесные повреждения. Автомобиль ВАЗ-2109 с полной нагрузкой двигался, со слов водителя, до наезда с постоянной скоростью около 35 км/ч (9,7 м/с). После наезда автомобиль ВАЗ-2109 двигался с торможением. В месте ДТП на дорожном полотне после места наезда имеется тормозной след 10 метров. Боковой интервал от двигавшегося во встречном направлении автобуса ПАЗ-3201 составлял 2,4 метра. Боковой интервал до левого края проезжей части от автомобиля ВАЗ-2109 составлял 4,5 метра. Скорость движения встречного автобуса ПАЗ-3201 составляла 40 км/ч (11,1 м/с). Дорожные условия на момент ДТП: мокрый асфальт; профиль дороги горизонтальный; ширина проезжей части 7 метров; движение двустороннее. Скорость движения на данном участке дороги ограничена до 40 км/ч. Видимость в направлении движения ТС более 300 метров; обзорность с места водителя по направлению движения пешехода ограничена движущимся во встречном направлении автобусом ПАЗ-3201. Наезд произошел левой передней частью автомобиля ВАЗ-2109. Место наезда на пешехода находится на расстоянии 5,0 метра от левого края проезжей части дороги по ходу движения автомобиля ВАЗ-2109. Пешеход – женщина в возрасте 65 лет – пересекала проезжую часть в поперечном направлении слева направо по ходу движения автомобиля ВАЗ-2109 в темпе спокойного шага со скоростью 3,9 км/ч (1,08 м/с) и вышла на проезжую часть в двух метрах от задней части автобуса ПАЗ-3201. Опасность для движения водителя возникла в момент выхода пешехода в поле обзорности с места водителя автомобиля ВАЗ-2109. На основании изложенного и руководствуясь ст. 195 (196) и 199 УПК РФ, ПОСТАНОВИЛ: 1. Назначить по настоящему делу автотехническую экспертизу, производство которой поручить ЭКЦ ГУ МВД России по Самарской области. 2. На разрешение эксперта поставить следующие вопросы: 1) с какой скоростью двигался автомобиль ВАЗ-2109 перед наездом на пешехода; — 121 — 2) соответствовала ли расчетная скорость движения автомобиль ВАЗ-2109 установленному ограничению на месте ДТП; 3) на каком удалении от места наезда на пешехода находился автомобиль ВАЗ-2109 в момент выхода пешехода в поле обзорности его водителя; 4) имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения при расчетной скорости; 5) если расчетная скорость автомобиля ВАЗ-2109 превышает установленную ограничениями на данном участке дороги, определить, имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения при этой скорости; 6) какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ. 3. Руководителю ЭКЦ разъяснить эксперту права и обязанности по ст. 57 УПК РФ и предупредить его об уголовной ответственности по ст. 307 УК РФ. Следователь _____________________________ Петров П.П. ЗАКЛЮЧЕНИЕ ЭКСПЕРТА по уголовному делу № 95/2017 о наезде автомобиля ВАЗ-2109 под управлением Сергеева С.С. на пешехода г. Тольятти 14 марта 2017 г. ВВОДНАЯ ЧАСТЬ 28 февраля 2017 г. в ЭКЦ ГУ МВД России по Самарской области при постановлении капитана полиции Петрова П.П. поступили материалы уголовного дела № 95/2017 о наезде автомобиля ВАЗ-2109 под управлением Сергеева С.С. на пешехода Бойко О.К. для проведения автотехнической экспертизы. На разрешение эксперта поставлены следующие вопросы: 1. С какой скоростью двигался автомобиль ВАЗ-2109 перед наездом на пешехода? 2. Соответствовала ли расчетная скорость движения автомобиля ВАЗ-2109 установленному ограничению на месте ДТП? — 122 — 3. На каком удалении от места наезда на пешехода находился автомобиль ВАЗ-2109 в момент выхода пешехода в поле обзорности его водителя? 4. Имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения при расчетной скорости? 5. Если расчетная скорость автомобиля ВАЗ-2109 превышает установленную ограничениями на данном участке дороги, определить, имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения при этой скорости? 6. Какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ? Проведение экспертизы поручено эксперту Сидорову С.С., имеющему среднее профессиональное автотехническое образование. ПОДПИСКА Мне, эксперту Сидорову С.С., разъяснены права и обязанности эксперта, предусмотренные ст. 57 УПК РФ. Об уголовной ответственности за дачу заведомо ложного заключения по ст. 307 УК РФ предупрежден. Эксперт ______________ Сидоров С.С. ИСХОДНЫЕ ДАННЫЕ К ЭКСПЕРТНОМУ ИССЛЕДОВАНИЮ ДТП (взяты из постановления о назначении экспертизы) 1. Обстоятельства ДТП: 15 января 2017 г. в 12 час 35 мин при следовании по ул. Новозаводской со стороны ул. Ларина в направлении ул. Комсомольской г. Тольятти водитель Сергеев С.С., управляя полностью груженным, технически исправным автомобилем ВАЗ-2109, совершил наезд на пешехода Бойко О.К., причинив ей тяжкие телесные повреждения. 2. Дорожные условия: состояние дорожного покрытия – мокрый асфальт; ширина проезжей части 7,4 метра для двустороннего движения; профиль дороги горизонтальный. 3. Наличие следов транспортного средства: на дорожном полотне имеется след торможения длиной 10 метров; след начинается за местом наезда и идет к задним колесам остановившегося автомобиля ВАЗ-2109. — 123 — 4. Расположение места наезда на пешехода: место наезда расположено на расстоянии 5,0 метра от левого края проезжей части по ходу движения автомобиля ВАЗ-2109. 5. Условия видимости: видимость в направлении движения более 300 метров. 6. Скорость движения транспорта: автомобиль ВАЗ-2109 двигался до наезда со скоростью 35 км/ч на расстоянии 4,5 метра от левого края проезжей части. Скорость движения автобуса ПАЗ-3201 составляла 40 км/ч. 7. Степень загруженности транспорта: автомобиль ВАЗ-2109 с полной нагрузкой. 8. Техническое состояние транспорта: автомобиль ВАЗ-2109 технически исправен. 9. Возраст и пол пешехода: женщина в возрасте 65 лет. 10. Направление движения пешехода по отношению к ТС (справа, слева, попутное, встречное): пешеход двигалась слева направо по отношению к автомобилю ВАЗ-2109. 11. Темп движения и (или) скорость движения пешехода: пешеход двигалась со скоростью 3,9 км/ч. 12. Расстояние от препятствия, ограничивающего обзорность с места водителя, до пешехода, вышедшего на проезжую часть: пешеход вышла на проезжую часть за автобусом ПАЗ-3201 на расстоянии 2,0 метра. 13. Боковой интервал между ТС, совершившим наезд, и препятствием, ограничивающим обзорность с места водителя: боковой интервал между двигавшимся во встречном направлении автобусом ПАЗ3201 и автомобилем ВАЗ-2109 – 2,4 метра. 14. Условия обзорности пешехода с места водителя (неограниченная, ограниченная условиями видимости, неподвижным объектом, попутным или встречным): обзорность с места водителя ограничена движущимся во встречном направлении автобусом ПАЗ-3201. 15. Частью ТС, которой произошел наезд на пешехода (передняя, боковая): наезд произошел передней частью автомобиля ВАЗ-2109. 16. Расстояние от передней (при наезде боковой частью) или от боковой (при наезде передней частью) части автомобиля до точки контакта с пешеходом: 0,5 метра от левой боковой поверхности. — 124 — 17. Какой момент принять за момент возникновения опасности для движения водителя: за момент возникновения опасности для движения водителя автомобиля ВАЗ-2109 принять момент выхода пешехода в поле зрения водителя автомобиля ВАЗ-2109 из-за автобуса ПАЗ-3201. 18. Схема ДТП приведена на рисунке 1. ОБОЗНАЧЕНИЯ И ПРИНЯТЫЕ КОЭФФИЦИЕНТЫ: • ах = 1,80 м – расстояние от места водителя до передней части автомобиля ВАЗ-2109; • ay = 0,50 м – расстояние от места водителя до правой боковой части автомобиля ВАЗ-2109; • Ba1 = 1,62 м – ширина автомобиля ВАЗ-2109; • Ba2 = 2,39 м – ширина автобуса ПАЗ-3201; • La1 = 4,0 м – длина автомобиля ВАЗ-2109; ◦ Δx = 2,0 м – расстояние от линии движения пешехода до задней части автобуса ПАЗ-3201 в момент выхода пешехода на проезжую часть; • Δх′ – расстояние от линии движения пешехода до задней части автобуса ПАЗ-3201 в момент появления пешехода в зоне обзорности с места водителя ВАЗ-2109; ◦ Δy = 2,4 м – боковой интервал между ВАЗ-2109 и ПАЗ-3201; ◦ Δ = 4,5 м – расстояние между левой боковой поверхностью ВАЗ-2109 и левым краем проезжей части; ◦ ly = 0,5 м – расстояние от левой боковой поверхности автомобиля ВАЗ-2109 до точки удара пешехода; • Sю = 10 м – длина тормозного следа задних колес автомобиля ВАЗ-2109; • Ja = 4,9 м/с2 – установившееся замедление при торможении; ◦ Va1 = 35 км/ч (9,7 м/с) – скорость автомобиля ВАЗ-2109; ◦ Va2 = 40 км/ч (11,1 м/с) – скорость автомобиля ПАЗ-3201; ◦ VП = 3,9 км/ч (1,08 м/с) – скорость движения пешехода. Примечание. • – приняты из приложений; ◦ – приняты из постановления о назначении экспертизы. — 125 — ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА 1. Домке, Э.Р. Расследование и экспертиза дорожно-транспортных происшествий : учебник для студ. высш. учеб. заведений / Э.Р. Домке. – 2-е изд., стер. – М. : Академия, 2012. – 288 с. 2. Инструкция по организации производства судебных экспертиз в государственных судебно-экспертных учреждениях системы Министерства юстиции Российской Федерации. Утверждена Приказом Министерства юстицииФедерации. Российской Федерации Министерства юстиции Российской Утверждена Приказомот 20 декабря 2002 № 347. –Российской URL: ceur.ru/library/docs/departmental_ Министерства юстиции Федерации от 20 декабря 2002, № requlations/item 132780. 347. а) ул. Новозаводская I'' Va2 Δ VП I' 2 ах Δx 7,4 м Va1 1 A• I Sa1 б) ул. Новозаводская Va2 аy II A II'' 2 Δy Va1 II' С S'П В Δ'х III' Е 1 SП ×D III ly Sю 1 IV Рис. 1. Схема наезда на пешехода при ограничении обзорности встречным ТС: Рисунок 1. Схема наезда на пешехода при ограничении обзорности встречным ТС: а – ТС в момент выхода пешехода на проезжую часть; пешехода в зону обзорности водителя ВАЗ-2109; – ВАЗ-2109;водителя 2 – ПАЗ-3201; б – ТС в момент выхода пешехода в зону 1обзорности ВАЗ-2109; 1 – ВАЗ-2109; 2 – ПАЗ-3201; I′, II′, III′ – положение I', II', III' – положение пешехода в момент выхода на проезжую часть,пешехода в момент в момент выхода на проезжую часть, в момент появления в зоне появления в зоне обзорности водителя и в момент наезда; I, II, III, IV – обзорности водителя и в момент наезда; I, II, III, IV – положение положение ВАЗ-2109 в момент пешехода на проезжую часть, в момент ВАЗ-2109 в момент выходавыхода пешехода на проезжую часть, в момент появления в зоне обзорности, в момент наезда, при остановке; появления в зоне обзорности, в момент наезда, при остановке; I'' и II'' – I″ и II″ – положение ПАЗ-3201 в момент выхода пешехода на проезжую положение момент выхода пешехода на проезжую частьнаезда и в момент часть иПАЗ-3201 в моментвпоявления в зоне обзорности; × – место а – ТС в момент выхода пешехода на проезжую часть; б – ТС в момент выхода появления в зоне обзорности; 3 × – место наезда — 126 — 125 ИССЛЕДОВАНИЕ По 1-му вопросу 1.1. Скорость движения автомобиля ВАЗ-2109 определим по формуле (1)(1) Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , 2 где Jа – установившееся замедление, Jа = 4,9 м/с ; t3 – время Va = 1,8 ∙ 4,9 ∙ 0,25 + √26 ∙ 4,9 ∙ 10 = 2,2 + 35,7 = 38 км/ч (10,6 м/с). нарастания замедления до установившегося значения, t3 = 0,25 с; �� �� Из подобия треугольников ACD иSABE можно Sю – длина тормозного следа, = 10 м (см.записать: рис. 1). �� = �� . ю ∙ t3 + �26�ваформулу �ю , (1) a = 1,8 ∙ Jaзначений При подстановке�Vпринятых (1) имеем � ∆� ��� уд ��� ��� ��П � (2) �. Va = 1,8 ∙ 4,9 ∙ 0,25 + √26 = 38 км/ч (10,6 м/с). ∙ 4,9 �уд �� �уд2,2 ���+ �∆35,7 � ∙ 10 = � �� �� �а� 1.2. Вывод: из расчетного Из подобия треугольников и ;ABE можно следует, записать:что перед = . тормо-(4) Sа2 =ACD S'П исследования �� �� �П жением автомобиль ВАЗ-2109 двигался со скоростью около 38 км/ч. � �уд ��� ��� ��П ∆� ��� �П (5) (2) �. По 2-му вопросуSП = Sуд ; � �уд ����а� �уд ��� �∆� � � о назначении автотехнической � � 2.1. Из постановления эксперти�уд ��� а����∆� ��� � а� ����а� �∆� �∆��� � а� ��уд а� � �а� �П Sа2 ДТП =�S' ; � ∆�ограничение (4) П П , зы следует, чтоа�в месте имеется скорости движе-(7) �П � �� ��� �уд П �∆� ��� �а� ния до 40 км/ч. Расчетным исследованием по 1-му вопросу установ�П ; (5) SП = S��,� уд ��,� ��,� ��,� � а� ��� ����,���,�� ��,���,� �,���,���,�� ��уд автомобиля лено, что�удминимальное значение скорости движения ��,� �,�� �,�� ��,� � . (8) � � ��,�� � а� ��,���,� �,���,� ВАЗ-2109�удсоставляет км/ч. ��� а����∆ ��� � а� ��� �∆� ∆� �∆����уд � ��,� ��уд а� � 38,0 �а� �а� �П �П � , �П Действительное скорости автомобиля ВАЗ- (7) ��значение �� �движения � �,���∙�� ��,���,���∙�� уд � �∆ уд ���,� уд � ��� а� � , 2109 могло быть больше, так как в расчетах не учитывались затраты(9) �,� ��,� ��,� �,��∙��уд ��,� ��,� ��,� �уд ��� ТС ����,���,�� ��,���,�пешехода. �,���,���,�� ��уд на деформацию и�перемещение ��,� �,�� �,�� ��,� � . (8) (10) ��,���,� �,�� уд − 26 ∙ Sуд − 742,5 = 0. � ��,���,� уд ��,� 2.2. Вывод: расчетная скорость движения автомобиля ВАЗ-2109 38,0 км/ч соответствовала скорости �� �,���∙�� ���установленному ���,� ��,���,���∙��ограничению уд (11) Sуд = + � уд � �42,�� � = 13 + 30,2 , = 43,2 м. (9) � � �,��∙��уд ��,� на месте ДТП 40 км/ч. �,� � � �а�= 0. �а� ∙ S+ − 742,5 (10) По 3-му вопросуS�Оуд=−(t26 0,5t � , (12) 1 + t2 уд 3) �,� ��∙�а 3.1. При исследовании� данного вопроса используем схемы, �� �� ��,� ��� =+ рис. + �0,25) �42,�� 30,2 43,2выхода удна представленные а� –�положение в момент пеше-(11) + = 13ТС =+10,8 +=11,3 =м.22,1 м. SO = (0,8 + S0,1 �0,5 ∙1: ���∙��,� �,� ∙aJ=a ∙1,8 t3 +∙ J�26� , а �ю , выхода пеше- (1) Va =б1,8 хода на проезжую часть; –Vположение ТС�в�26� ю�момент (1) a�∙ t3 а+ � а� а� Проведем сравнение значений удаления автомобиля от места наезда в S = (t + t + 0,5t ) � , (12) О водителя 1 2 3 хода в зону обзорности автомобиля ВАЗ-2109, положение �,� ��∙�а= 38 км/ч (10,6 м/с). Va = 1,8V∙a4,9 ∙ 0,25 26 ∙+4,9 ∙ 10 = 2,2 = 1,8 ∙ 4,9+∙ √ 0,25 ∙ 4,9 ∙ 10+ =35,7 2,243,2 + 35,7 38 км/ч (10,6 м/с). √26 = м и= остановочного момент появления пешехода обзорности автомобиля ВАЗ-2109в взоне момент наезда и� Sвудместе остановки. ��,� �� �� �� �� (0,8 + 0,1 + 0,5 ∙ACD 0,25) ABE + можно =можно 10,8 +записать: 11,3 ==22,1 SO = подобия треугольников записать: . м.= ��.. Из подобия треугольников ACD и ABE треугольников ACD и> ABE записать: ���∙��,� �,� м.подобия Из сравнения следует,ичто Sуд SО.можно пути SИз О = 22,1Из �� �� �� �� Проведем значений удаления автомобиля от места 4.2. Вывод:сравнение из сравнения S = 43,2 м м� следует, что наезда Sуд > (2) Sв � и S = 22,1 .∆� �� (2) О �уд ��� � ���уд ���� �∆��� �� �∆� . уд � � � м и остановочного моментв появления зоненаличие обзорности Sудуд= 43,2 почти 2 раза, чтопешехода указываетв на у водителя автомобиля ВАЗ-2109 �а� � а� S = S' ; (4) а2 П Sа2 = S'ПSуд > ; наезд Из сравнения предотвратить следует, что SО. пути SО = 22,1 м. технической возможности на пешехода путем � ��� �уд �� �� ∆�О ��П� ��� �� уд� ����уд П � �П �П �— П 127 4.2. Вывод: из сравнения = 43,2 м и�—S = 22,1 м следует, что Sуд > (5) SО своевременного экстренного торможения. SП S=удSуд S�Па�=; Sуд П ; О �а� почти в 2 раза, что указывает на� наличие у водителя автомобиля ВАЗ-2109 � � � � ��� а� а� � ���∆ � �� а� �� �∆�а� ∆ �∆�� � а� �� а� �а� �а� (2) (4) (5) Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , (1) Va = 1,8 ∙ 4,9 ∙ 0,25 + √26 ∙ 4,9 ∙ 10 = 2,2 + 35,7 = 38 км/ч (10,6 м/с). Здесь �� �� Из подобия треугольников ACD и ABE можно записать: = . �� �� Δх-∙ + (3) JaS∙a2t3, + �26�а �ю , (1) VΔaх′==1,8 � �уд ��� ��� ��П 2 из ∆ ��� где Sа2 пройденный автомобилем I″ в(10,6 полоVa–=путь, 1,8 ∙ 4,9 ∙ 0,25 + √26 ∙ 4,9 ∙ 10 =�2,2 +� положения 35,7 .= 38 км/ч м/с). �уд ��� �уд ��� �∆�� жение II″ (см. рис.): �� �� � Из подобия треугольников ACD и ABE можно записать: = . �� �� (4) Sа2 = S'П �а�; �П �уд ��� ��� ��П� �П �Пуд ���уд �а� ∆� ��� � ; �уд����∆��. S =S (5) �а� � �а� SSа2П�′=��=S' ;l )�∆ (Δ − S . ∆ �∆��� ���а���уд ��а� (6) �уд ��� а����∆ �� П� + �� �а� �П y� � П � а� П П � , �П �� ��� в� выражение � подстановки (3)–(6) (2) преобразований уд � и�∆ � ��� П а� После SП = Sуд ; ���,� получим уравнение вида а� ��,� ��,� ��,� �уд �����,�����,���,���,����,���,� �,���,���,���,����уд ��,� � � �а� � � ��а����,�� . �уд ��� а����∆� ��� � а� ��� �∆� ∆� �∆�� уд �а� �П �� �,���,� ��,���,� а� Пуд ��,�� (7) � , �П �� ��� �уд �∆� ��� � а� �,���∙��уд ���,� ��,���,���∙��уд (2) (4) (2)(5) (4) (7) (5) (7) (8) � , (9) ��,� места водителя ��,� ��,� автомобиля ��,� �,��∙�� �,� где ах – расстояние до передней части уд ��,� �уд ��� от����,���,�� ��,���,� �,���,���,�� ��уд ��,� �,�� �,�� ��,� . (8) �,�� ВАЗ-2109, ах = 1,80 м; a�,���,� – �расстояние от�места=водителя � y 0. ��,���,�до правой (10) уд − 26 ∙ Sуд − 742,5�уд ��,� боковой части автомобиля ВАЗ-2109, ay = 0,50 м; Δx – расстояние от �,���∙��уд ���,� ��,���,���∙��уд ��до задней ��� части автобуса линии движения пешехода ПАЗ-3201 в мо- (1) (9)(11) ∙� Ja ∙ t3�+� , +, 30,2 �26� +�,� �42,�� = 13 = 43,2 м. SVудa = 1,8 �,��∙�� а� удю��,� � � мент выхода пешехода на проезжую часть, Δx = 2,0 м; Δх′ – расстояние 1,8 Ja∙ ∙∙10 tS3 +=−�26� �ю � ∙ 4,9 a= а35,7 � = 1,8 ∙ движения 4,9 ∙ 0,25 +V 26 +части = 38�а� км/ч (10,6 м/с). (1) (10) −∙ 26 742,5 =�,0. �уд √ уд 2,2 отVaлинии пешехода ПАЗ-3201 а� автобуса SО = до (t1 +задней t2 + 0,5t ) � , (12) 3 �� ��водитеа Vмомент ∙ 0,25 + √пешехода 26 ∙ 4,9 ∙ �10 = 2,2обзорности + 35,7�,� = 38��∙� км/ч (10,6 м/с). a = 1,8 ∙ 4,9 в появления в зоне с места Из подобия треугольников��ACD �� и ABE можно записать: = . �� �� �+ 30,2 = +� � �42,�� = 13 (11) уд = ��,� �� �� 43,2 �� м. ля ВАЗ-2109; –Sбоковой интервал между ВАЗ-2109 и ПАЗ-3201, �ABE � + 0,5 + �0,1ACD ∙ 0,25) + = 10,8 + 11,3 SO =Δy(0,8 Из подобия треугольников и можно записать: = . = 22,1 м. � ���∙��,� �,� �� �� �� ∆ �� �� �� уд � � � П Δy = 2,4 м; Δ – расстояние от� левой поверхности ВАЗ-2109 (2) � � боковой �а� �а� �. �уд ��(t �� �∆ � �+ t +�∆ уд �) � S = 0,5t � , (12) в � �� �� �� �� Проведем удаления автомобиля от места наезда уд части, �Означений � 1Δ �м; l3� – расстояние П =24,5 до левого края сравнение проезжей от левой бо- (2) ��∙�а y �,� � . �уд ��� �а� �уд ��� �∆�� ковой появления поверхности автомобиля до� точки Sа2 = S'Пв зоне ;ВАЗ-2109 (4) 43,2 пешехода, м и остановочного момент пешехода обзорности Sуд =удара ��,� �� �П + 0,1 +автомобиля 0,5 ∙�0,25) + = 10,8 +км/ч 11,3(10,6 = 22,1 м. а� ly = 0,5 м;SOVa1=–(0,8 скорость ВАЗ-2109, V = 38 м/с); ���∙��,� �,� Sа2 = S'П следует, ; (4) � что Sуд > a1SО. пути SО = 22,1 м. Из сравнения ПП ; (5) SП = Sуд �ПАЗ-3201, VПроведем – скорость автомобиля V = 40 км/ч (11,1 м/с); � a2 сравнение значений а� удаленияa2автомобиля от места наезда в �ПS 4.2. Вывод: из сравнения = 43,2 м и S = 22,1 м следует, что О S�уд ;уд VП = 3,9 км/ч (5)Sуд > SО SП = пешехода, V – скорость движения (1,08 �а� � �а� м/с). �а�� �∆обзорности �уд ���пешехода ���∆� ��� �в а�зоне �� ∆� �∆��� � Sа�уд��= 43,2 м и остановочного моментП появления � уд �а� �П �П а� численных значений заданных или принятых па- ВАЗ-2109 почти Подстановкой в 2 раза,��а� что указывает на наличие у�а� водителя автомобиля � (7) �а� , �П ����� ������а� ��� �∆� � ��� ���∆ ∆ �∆�� � �� � �∆ �� уд � � уд уд � � Из�а�сравнения что Sуд �>а��SПО. �а� пути раметров SО = 22,1 м. �Пследует, в уравнение приводим его к виду � (7) путем технической возможности предотвратить наезд , на пешехода � �� ��� �уд П �∆� �����,� ��,� ��,� �S 4.2. Вывод: из��,� сравнения = 43,2 м и м следует, что S а�О = 22,1 �� �уд ��� ����,���,��Sуд��,���,� �,���,���,�� уд > SО уд ��,� ��,� �,�� �,�� своевременного экстренного торможения. � . (8) �,�� ��,� (8) ��,� ��,� ��,� �,���,� �уд ��,���,� �уд ��� ����,���,�� уд ��,� почти в 2 раза, что��,�указывает на��,���,� наличие�,���,���,�� у водителя ВАЗ-2109 ��,� �,����автомобиля �,�� � . (8) �,�� �,���,� �уд уд��,���,� �,���∙�� ��,���,���∙�� Преобразованиями уравнение приводим к виду уд ���,� (8) ��,� вначале технической возможности предотвратить наезд на пешехода путем � , (9) По 5-му вопросу �,���∙�� �,� ���,� �,��∙��уд ��,� ��,���,���∙�� уд уд своевременного экстренного торможения. � , � �,� �,��∙��уд=��,� − 26 ∙ Sуд − 742,5 0. �уд � − 26 �∙ Sуд − 742,5 = 0. �уд 126 �� �� 128 —= 13 + 30,2 = 43,2 м. По 5-му вопросу � �42,�� Sуд = + � — � � �� ��� = 43,2 м. Sуд = + � � �42,�� = 13 + 30,2 � � � �� SО = (t1 + t2 + 0,5t3) а� � а� , (9) (9) (10) (10) (11) (11) (12) � �а� �а� � �уд ��� ����,���,�� �уд ��� ���∆ ����,�� �∆��,���,� ∆� �∆����,���,���,�� � а� ��уд а��,����уд ��,� ��,�� ��� � � �а� �а� �П �П � . �,�� �t3 + �26� , �,���,� ��,���,� �П ��уд, = 1,8 ∙ J ∙ a a �� ��V ��,� а ю � �∆ �� � уд � � (8) (7) (1) �а� �,���∙��уд ���,� ��,���,���∙��уд ��,� ��,� ��,� ��,� (10,6 м/с). Va = 1,8�∙ 4,9 ∙ 0,25 + √26 ∙ 4,9 ∙ 10 = 2,2 + 35,7 = ,38 км/ч (9) ��� ����,���,�� ��,���,� � �,���,���,�� ��,��,����уд ��,� ��,� �,���,� а затем кудквадратному уравнению � �,��∙��уд�,�� . (8) �� �� �,���,�ACD и ABE можно �удзаписать: ��,���,� Из подобия треугольников = . � (10) (10) �� �� − 26 ∙ Sуд − 742,5 =��,� 0. �уд �,���∙��уд ���,� ��,���,���∙��уд �уд ��� ��� ��дает ∆� ��� П � значение (9) Решение этого уравнения Syд, на ко. ,расстояния (2) �,��∙�� �,�1,8 �� = ��∙� J ∙� уд ��,� �� t + , (1) V �26� � �� � �� �∆ a a 3 � а ю = + � �42,�� = 13 + 30,2 = 43,2 м. S уд � уд � � тором находился удавтомобиль ВАЗ-2109 в момент выхода пешехода (11) � � � 26водителя S�уд 742,5 = +0.35,7 (10) уд −26 а� ∙−10 вVзону видимости места от2,2 места наезда: ∙ 4,9 ∙ 0,25с�+ ∙∙П4,9 = = 38 км/ч (10,6 м/с). √ = S' a = 1,8 Sа2 ; (4) � �� SО =� (t1�+П t2 + 0,5t3) а� � а� , �� �� (12) �,� ��∙�а �� �� Из подобия треугольников ACD и ABE можно записать: = . � (11) � Sуд = + � �42,�� = 13 + 30,2 = 43,2�� м. �� (11) П ; (5) � SП = �Sуд ��� �а� ��,� ∙ 0,25) + = 10,8 + 11,3 = 22,1 м. SO = (0,8 + 0,1 +�уд0,5 � �� �� �� ∆ �� � � � � � П ���∙��,� �,� 3.2. Вывод:�а�удаление �автомобиля места наезда в мо- (2) �а� �.а� от � � ∆ВАЗ-2109 �уд ��� ���∆ �� �∆�� �� SО� �� = �(t��1�уда� +�� t2 �+�∆0,5t �� �����а� , уд�а� (12) � 3�)уд ��� � �∆ �а� а� П � видимости Па �,� ��∙� мент выхода пешехода в зону с места водителя составляПроведем сравнение значений удаления автомобиля наезда � , от места (7) в � П �� ��� � �∆ �� �а� ��,� ��� уд �а� � � ет 43,2 метра. S = S' ; (4) П обзорности и остановочного момент появления зоне Sуд =+ 43,2 0,1 + 0,5а2∙ в0,25) + = 10,8 11,3 =м 22,1 м. S = (0,8 +пешехода O � �П ��,� �,� ��,� ���∙��,� ��,� ��,� �уд ��� ����,���,�� ��,���,� �,���,���,�� ��уд ��,� �,��� ��,� По 4-му П м. Извопросу сравнения Sуд > SО.�,�� �,��от места пути SО = 22,1 . наезда (8) Sудудаления ; что � (5) SП =следует, Проведем сравнение значений автомобиля в �,���,� �уд автомобиля ��,���,� �а� у водителя 4.1. Исследование наличия ВАЗ-2109, ��,� 4.2. Вывод: из сравнения S = 43,2 м и S = 22,1 м следует, что S удобзорности S О =� 43,2 �м и остановочного уд > SО � �а� момент появления пешехода в �� зоне а� уд � уд ���,� ��,���,���∙�� совершившего технической возможности избежать наезда �уд ��� а�ДТП, ���∆��,���∙�� ∆� �∆�� ��уд а� � � � уд��� �∆� � �а� � � �� у водителя (9) а� П П, вна2пешехода раза, чтопутем указывает на наличие автомобиля ВАЗ-2109 , (7) �,� экстренного проводим, сравнивая П м. Из сравнения следует, что торможения S �,��∙�� > S уд. ���,� путипочти S = 22,1 О �� ��� уд �Оуд � �∆� ��� а� � предотвратить значениявозможности удаления автомобиля места =наезда момент появления(10) технической на пешехода путем ∙ Sудот 0. мв��,� �уд 4.2. Вывод: из сравнения Sуд− =26��,� 43,2 м− и742,5 SО = наезд 22,1 следует, ��,� ��,� что Sуд > SО ����,���,�� S ��,���,� �,���,���,�� ��уд пешехода�вуд ��� зоне обзорности = 43,2 м с остановочным путем S . ��,� �,�� уд �,�� ��,� О своевременного торможения. . ВАЗ-2109 (8) �,��автомобиля � почти в 2 раза, чтоэкстренного указывает на наличие у � водителя �� �� �,���,� �уд ��,���,� Остановочный путь при торможении в данных дорожных усло� ��,� Sуд = + � �42,�� = 13 + 30,2 = 43,2 м. (11) � � вияхвозможности предотвратить технической наезд удна пешехода путем �,���∙��уд ���,� ��,���,���∙�� �, � (9) � ��,� �а� �,��∙�� �,� По 5-му вопросу (12)(12) SО = (t1 + t2 + 0,5t3) а�уд� , своевременного экстренного торможения. �,� ��∙�а � − 26 ∙ S��,� (10) �уд уд − 742,5� = 0. где tS1 –=время реакции водителя, t+ = �� 0,8 с;= t10,8 – время 1 2 (0,8 + 0,1 + 0,5 ∙ 0,25) + 11,3срабатывания = 22,1 м. O ���∙��,� �,� тормозов, t2 = 0,1 с;��t3 – время нарастания t = 0,25 с; ��� По 5-му вопросу 126= 13 + замедления, 30,2 = 43,2 м. 3 (11) Sуд = + � � �42,�� � удаления � замедление, Проведем сравнение значений места наезда в Jа – установившееся Jа =автомобиля 4,9 м/с2; Vот – расчетная a1 скорость движения ВАЗ-2109, V=�а��=43,2 38 м/с. � момент появления пешеходаавтомобиля SвО =зоне (t1 +обзорности t2 + 0,5t3) а�Sуд � a1 , м и остановочного (12) �,� в выражение ��∙�а При подстановке принятых126 значений (12) получим пути SО = 22,1 м. Из сравнения следует, что Sуд > �SО. ��,� �� + 0,1 + 0,5S∙ 0,25) 10,8м+следует, 11,3 = 22,1 SO = (0,8 4.2. Вывод: из сравнения = 43,2 м+и S = =22,1 чтом.S > S уд �,� ���∙��,� О уд О Проведем сравнение автомобиля отВАЗ-2109 места в сравнение значений удаления автомобиля от места наезда почти Проведем в 2 раза, что указывает на значений наличие уудаления водителя автомобиля наезда в момент появления пешехода в зоне обзорности S = 43,2 м уд и остановочного момент появления пешехода впредотвратить зоне обзорностинаезд Sуд = 43,2 технической возможности на мпешехода путем и остановочного пути SО = 22,1 м. Из сравнения следует, что Sуд > SО. м.экстренного Из сравнения следует,Sчто Sуд > м SОи . S = 22,1 м следует, что пути SО = 22,14.2. своевременного торможения. Вывод: из сравнения = 43,2 уд О 4.2.SВывод: из сравнения S = 43,2 м и S = 22,1 м следует, что автоSуд > SО > S почти в 2 раза, что указывает на наличие у водителя уд О уд О мобиля ВАЗ-2109 технической возможности предотвратить наезд на почтиПо в 5-му 2 раза, что указывает на наличие у водителя автомобиля ВАЗ-2109 вопросу пешехода путем своевременного экстренного торможения. технической возможности предотвратить наезд на пешехода путем своевременного экстренного торможения. 126 — 129 — По 5-му вопросу По 5-му вопросу 5.1. В данной дорожной обстановке пешеход Бойко О.К. должна была руководствоваться требованиями следующих пунктов ПДД РФ: «4.3. Пешеходы должны переходить дорогу по пешеходным переходам, в том числе подземным и надземным, а при их отсутствии – на перекрестках по линии тротуаров или обочин. <…> При отсутствии в зоне видимости перехода или перекрестка разрешается переходить дорогу под прямым углом к краю проезжей части на участках без разделительной полосы и ограждений там, где она хорошо просматривается в обе стороны. <…> 4.5. На нерегулируемых пешеходных переходах пешеходы могут выходить на проезжую часть (трамвайные пути) после того, как оценят расстояние до приближающихся транспортных средств, их скорость и убедятся, что переход для них будет безопасен. При переходе дороги вне пешеходного перехода пешеходы, кроме того, не должны создавать помех для движения транспортных средств и выходить из-за стоящего транспортного средства или иного препятствия, ограничивающего обзорность, не убедившись в отсутствии приближающихся транспортных средств». Поскольку в данной ДТС была создана помеха для движения автомобиля ВАЗ-2109, вынуждающая водителя прибегнуть к экстренному торможению, действия пешехода противоречили требованиям п. 4.3 и 4.5 ПДД РФ. 5.2. В данной дорожной обстановке водитель автомобиля ВАЗ2109 Сергеев С.С. должен был руководствоваться требованиями следующих пунктов ПДД РФ: «10.1. Водитель должен вести транспортное средство со скоростью, не превышающей установленного ограничения <…> При возникновении опасности для движения, которую водитель в состоянии обнаружить, он должен принять возможные меры к снижению скорости вплоть до остановки транспортного средства». Поскольку водитель Сергеев С.С. двигался со скоростью, не превышающей установленных ограничений, в его действиях отсутствует противоречие требованиям первой части п. 10.1 ПДД РФ. Наличие у водителя Сергеева С.С. технической возможности предотвратить наезд на пешехода путем своевременного экстренного — 130 — торможения указывает на несоответствие его действий требованиям второй части п.10.1 ПДД РФ. ВЫВОДЫ 1. Скорость движения автомобиля ВАЗ-2109 составляла около 38 км/ч. 2. Расчетная скорость движения автомобиля ВАЗ-2109 38,0 км/ч соответствовала установленному ограничению скорости на месте ДТП 40 км/ч. 3. Удаление автомобиля ВАЗ-2109 от места наезда в момент выхода пешехода в зону видимости с места водителя составляет 43,2 метра. 4. В данной дорожной обстановке водитель автомобиля ВАЗ-2109 имел техническую возможность предотвратить наезд на пешехода путем своевременного экстренного торможения. 5. В данной дорожной обстановке пешеход Бойко О.К. должна была руководствоваться требованиями пунктов 4.3 и 4.5 ПДД РФ. Ее действия требованиям данных пунктов Правил не соответствовали. В данной дорожной обстановке водитель автомобиля ВАЗ-2109 Сергеев С.С. должен был руководствоваться требованиями п. 10.1 ПДД РФ. Его действия находились в соответствии с первой частью п. 10.1 ПДД РФ и противоречили требованиям второй части п. 10.1 Правил. 5.4. Исследование наезда транспортного средства на пешехода при попутном и встречном движении 5.4.1. Исследование наезда транспортного средства на пешехода при попутном движении Основанием для проведения экспертного исследования является постановление следователя СУ при Управлении МВД России по г. Тольятти капитана полиции Петрова П.П. от 18 февраля 2017 года о назначении автотехнической экспертизы по материалам уголовного дела № 99/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ, приведенное ниже. — 131 — ПОСТАНОВЛЕНИЕ о назначении автотехнической экспертизы 18 февраля 2017 г. г. Тольятти Следователь СУ при Управлении МВД России по г. Тольятти капитан полиции Петров П.П., рассмотрев материалы уголовного дела № 99/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ, УСТАНОВИЛ: 23 января 2017 г. в 18 час 40 мин при следовании по Обводному шоссе со стороны Хрящевского шоссе в направлении Санчелеевского шоссе г. Тольятти водитель Нинов Н.Н., управляя технически исправным автомобилем КАМАЗ-5320, совершил наезд на пешехода Резника И.С., причинив ему тяжкие телесные повреждения. Автомобиль КАМАЗ-5320 двигался со скоростью 55 км/ч (15,3 м/с) и совершил наезд на пешехода в процессе торможения. В месте ДТП на дорожном полотне имеется двойной тормозной след 16,5 метра. Дорожные условия на момент ДТП: сухой асфальт; профиль дороги горизонтальный; ширина проезжей части для одного направления движения 7 метров; движение одностороннее. Скорость движения на данном участке дороги ограничена до 90 км/ч. Наезд произошел серединой передней части автомобиля КАМАЗ-5320. Место наезда на пешехода находится на расстоянии 5,7 метра от начала тормозного следа. Пешеход двигался в попутном направлении в темпе быстрого шага со скоростью 6,3 км/ч (1,75 м/с). ТС технически исправно, без груза. Опасность для движения водителя возникла в момент появления пешехода в зоне видимости водителя автомобиля КАМАЗ-5320 на расстоянии 35 метров. Видимость в направлении движения 45 метров. На основании изложенного и руководствуясь ст. 195 (196) и 199 УПК РФ, ПОСТАНОВИЛ: 1. Назначить по настоящему делу автотехническую экспертизу, производство которой поручить ЭКЦ ГУ МВД России по Самарской области. 2. На разрешение эксперта поставить следующие вопросы: 1) с какой скоростью двигался автомобиль КАМАЗ-5320 перед ДТП; — 132 — 2) какая скорость движения соответствует видимости дороги 45 метров на месте ДТП; 3) имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения в условиях видимости пешехода 35 метров при расчетной скорости и при скорости, соответствующей видимости дороги; 4) имел ли водитель ТС техническую возможность избежать наезда на пешехода путем его объезда при расчетной скорости; 5) какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ. 3. Руководителю ЭКЦ разъяснить эксперту права и обязанности по ст. 57 УПК РФ и предупредить его об уголовной ответственности по ст. 307 УК РФ. Следователь _____________________________ Петров П.П. ЗАКЛЮЧЕНИЕ ЭКСПЕРТА по уголовному делу № 99/2017 о наезде автомобиля КАМАЗ-5320 под управлением Нинова Н.Н. на пешехода г. Тольятти 17 марта 2017 г. ВВОДНАЯ ЧАСТЬ 24 февраля 2017 г. в ЭКЦ ГУ МВД России по г. Тольятти при постановлении следователя, капитана полиции Петрова П.П. поступили материалы уголовного дела № 99/2017 о наезде автомобиля КАМАЗ-5320 под управлением Нинова Н.Н. на пешехода Резника И.С. для проведения автотехнической экспертизы. На разрешение эксперта поставлены следующие вопросы: 1. С какой скоростью двигался автомобиль КАМАЗ-5320 перед ДТП? 2. Какая скорость движения соответствует видимости дороги 45 метров на месте ДТП? 3. Имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения в условиях видимости пешехода 35 метров при расчетной скорости и при скорости, соответствующей видимости дороги? 4. Имел ли водитель ТС техническую возможность избежать наезда на пешехода путем его объезда при расчетной скорости? — 133 — 5. Какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ? Проведение экспертизы поручено эксперту Сидорову С.С., имеющему среднее профессиональное автотехническое образование. ПОДПИСКА Мне, эксперту Сидорову С.С. разъяснены права и обязанности эксперта, предусмотренные ст. 57 УПК РФ. Об уголовной ответственности за дачу заведомо ложного заключения по ст. 307 УК РФ предупрежден. Эксперт ______________Сидоров С.С. ИСХОДНЫЕ ДАННЫЕ К ЭКСПЕРТНОМУ ИССЛЕДОВАНИЮ ДТП (приняты из постановления о назначении автотехнической экспертизы) 1. Обстоятельства ДТП: 23 января 2017 г. в 18 час 40 мин при следовании по Обводному шоссе со стороны Хрящевского шоссе в направлении Санчелеевского шоссе г. Тольятти водитель Нинов Н.Н., управляя технически исправным автомобилем КАМАЗ-5320, совершил наезд на пешехода Резника И.С., причинив ему тяжкие телесные повреждения. 2. Дорожные условия: состояние дорожного покрытия – сухой асфальт; ширина проезжей части 7 метров для одностороннего движения; профиль дороги горизонтальный. 3. Наличие следов транспортного средства: имеется двойной след торможения длиной 16,5 метра. 4. Расположение места наезда на пешехода: место наезда расположено на расстоянии 5,7 метра от начала тормозного следа. 5. Условия видимости: видимость в направлении движения 45 метров. 6. Скорость движения транспорта: автомобиль КАМАЗ-5320 двигался, со слов водителя, со скоростью 55 км/ч; в процессе исследования необходимо уточнить скорость. 7. Степень загруженности транспорта: автомобиль КАМАЗ-5320 с полной нагрузкой. — 134 — 8. Техническое состояние транспорта: автомобиль КАМАЗ-5320 технически исправен. 9. Возраст и пол пешехода: мужчина в возрасте 56 лет. 10. Направление движения пешехода по отношению к ТС (справа, слева, попутное, встречное): по ходу движения автомобиля КАМАЗ-5320. 11. Темп движения и (или) скорость движения пешехода: пешеход двигался быстрым шагом со скоростью 7,0 км/ч. 12. Условия видимости пешехода с места водителя: видимость с места водителя ограничена и составляет 35 метров. 13. Какой частью ТС произошел наезд на пешехода (передней частью, боковой частью): наезд произошел серединой передней части автомобиля КАМАЗ-5320. 14. Какой момент принять за момент возникновения опасности для движения водителя: за момент возникновения опасности для движения принять момент появления в поле зрения принять момент появления пешехода в поле пешехода зрения водителя автомобиля водителя автомобиля КАМАЗ-5320 на расстоянии 35 метров. КАМАЗ-5320 на расстоянии 35 метров. 15. Схема ДТП приведена на рис. 1. 15. Схема ДТП приведена на рис. 1. SВ = 35 м Sю= 16,5 м I II Va VП • × III S'ю = 5,7 м Sуд Обводное шоссе Рисунок 1. Схема наезда ТС на пешехода при попутном движении: Рис. 1. Схема наезда ТС на пешехода при попутном движении: водителя; I – ТС в момент I – ТС в момент появления пешехода в поле видимости появления пешехода в поле видимости водителя; II×– – ТСместо при наезде; II – ТС при наезде; III – ТС при остановке; наездаIII – ТС остановке; × – место наезда ИСПОЛЬЗУЕМАЯпри ЛИТЕРАТУРА 1. Инструкция по организации производства судебных экспертиз ИСПОЛЬЗУЕМАЯсудебно-экспертных ЛИТЕРАТУРА в государственных учреждениях системы 1. Инструкция юстиции по организации производства судебных Утверждена экспертиз в Министерства Российской Федерации. государственных судебно-экспертных учреждениях системы Приказом Министерства юстиции Российской Федерации от 20 декабря 2002 №юстиции 347. – URL: ceur.ru/library/docs/departmental_ Министерства Российской Федерации. Утверждена Приказом requlations/item 132780. Министерства юстиции Российской Федерации от 20 декабря 2002 № 347. 2. Чава, И.И. Судебная — автотехническая 135 — экспертиза. Исследование обстоятельств дорожно-транспортных происшествий : учеб.-метод. пособие / И.И. Чава. – М. : Библиотека эксперта. 2007. – 96 с. 2. Чава, И.И. Судебная автотехническая экспертиза. Исследование обстоятельств дорожно-транспортных происшествий : учеб.-метод. пособие / И.И. Чава. – М. : Библиотека эксперта. 2007. – 96 с. ОБОЗНАЧЕНИЯ И ПРИНЯТЫЕ КОЭФФИЦИЕНТЫ: • Ba = 2,50 м – ширина автомобиля КАМАЗ-5320; • La = 7,435 м – длина автомобиля КАМАЗ-5320; • t1 = 0,8 с – время реакции водителя; • t2 = 0,2 с – время срабатывания тормозов; • t3 = 0,6 с – время нарастания замедления до установившегося значения; ◦ Sю = 16,5 м – длина тормозного следа задних колес автомобиля КАМАЗ-5320; • Ja = 6,2 м/с2 – установившееся замедление при торможении автомобиля КАМАЗ-5320; ◦ Va1 = 55 км/ч (15,3 м/с) – скорость КАМАЗ-5320, со слов водителя; ◦ VП = 6,3 км/ч (1,75 м/с) – скорость движения пешехода; Примечание. • – приняты из Приложений; ◦ – приняты из постановления о назначении экспертизы. ИССЛЕДОВАНИЕ По 1-му вопросу 1.1. Скорость движения автомобиля КАМАЗ-5320 перед началом торможения: Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , (1) (1) где – установившееся = +6,2 м/с=;58,3 t3 – время нарастаа Va =Jа1,8 ∙ 6,2 ∙ 0,6 +�26 ∙замедление, 6,2 ∙ 16,5 = J6,7 51,6 км/ч (16,2 м/с). ния замедления, t3 = 0,6 с; Sю – длина тормозного следа, Sю = 16,5 м � ∙ �� (см. рис. 1). (2) Vдоп = 3,6Ja ∙ T �� В� � 1 � 1 �, � ∙ аt3∙ �+ �26�ав�формулу Va = 1,8 ∙ Jaзначений ю, При подстановке принятых (1) имеем (1) 2 ∙ 6,2 ∙ 16,5 = 6,7 + 51,6 = 58,3 км/ч (16,2 м/с). Va = 1,8 ∙ 6,2 ∙ 0,6 +�26 � ∙ �� � 1 � 1� = 17,6 ∙ 3,87 = 68 км/ч (18,9 м/с). Vдоп = 3,6 ∙ 6,2 ∙ 0,8�� �,� ∙ �,�� 1.2. Вывод: из расчетного исследования следует, что перед тор� ∙ �� (2) Vдоп = 3,6Ja ∙ T �� В� � 1 � 1 �, � �а ∙ � двигался �а � со скоростью около можением автомобиль КАМАЗ-5320 (3) SО = (t1 + t2 + 0,5t3) � а , �,� �� ∙ �а 58,3 км/ч (16,2 м/с). � ∙ �� Vдоп = 3,6 ∙ 6,2 ∙ 0,8�� �,� SО = (0,8 + 0,2 + 0,5�,�∙ ∙0,6) � � � 1 � 1���,� = 17,6 ∙ 3,87 = 68 км/ч (18,9 м/с). ��,� �,� + �� ∙ �,� SО = (t1 + t2 + 0,5t3) = 21,05 + 21,08 = 42,13 м. �а � �а� , (3) �,� ∙ 6,2 �� ∙= �а 53 км/ч (14,7 м/с). VН = �26 ∙ �ПН ∙ �а � √26 ∙ 17,4 � ��,� ��,� —� =��21,05 ∙ �П +�21,08 = 42,13 м. + �� � SО = (0,8 + 0,2 + 0,5 ∙ 0,6) — 136 Sуд = ����,� �а � ��а∙ �,�Н � , ��а �а ��П VН = �26 ∙ �ПН ∙ �а � √26 ∙ 17,4 ∙�6,2 = 53 км/ч (14,7 м/с). �,�� ∙ ���,����,�� � (5) (5) (6) По 2-му вопросу (1) Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , 2.1. Допустимую скорость, соответствующую видимости дороги = 1,8 ∙ 6,2 ∙на 0,6месте +�26 ∙ 6,2определим ∙ 16,5 = 6,7из + зависимости 51,6 = 58,3 км/ч (16,2 м/с). метров ДТП, SВV=a 45 Vдоп = 3,6Ja ∙ T �� � ∙ �В� �а ∙ � � � 1 � 1 �, (2) (2) где T = t1′ + t2 + 0,5t3 –�время приведения в действие тормозов, с; ∙ �� = 3,6 реакции ∙ 6,2 ∙ 0,8�� � 1 � 1� = 17,6 ∙ 3,87 = 68 км/ч (18,9 м/с). � для данной ДТС, t ′ = 0,3 с; t – время t1′V–допвремя водителя �,� ∙ �,� (1) Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , 1 2 срабатывания тормозов, t2 = 0,2 с; t3 – время нарастания замедления, � �а �а Va = 1,8 ∙ 6,2 ∙ 0,6 +�26S∙О6,2 + 51,6 км/ч (16,2 м/с). (t∙ 116,5 t2=++6,7 0,5t �= 58,3 ,S ′– t3 = 0,6 с; T = t1′ + t2 + 0,5t3 ==0,3 ++0,2 0,53∙)0,6 0,8∙ �с; видимость (3) �,� = �� В а � ∙ �� в направлении движения ��,� В� дороги, ��,� � 1� � 1 S �,В′ = 45 м. (2) Vдоп = 3,6Jэлементов a ∙ T �� �а ∙+� = (0,8 + 0,2 + 0,5 ∙ 0,6) = 21,05 21,08 = 42,13 м. S О Подставив принятые значения формулу (2), +получим ∙ �,� �,� в�� � ∙ �� 26=∙ 17,6 17,4∙ ∙3,87 6,2 ==68 53км/ч км/ч(18,9 (14,7 м/с). �26 ∙ �ПН ∙� ��а � 1 �√1� м/с). Vдоп = 3,6 ∙V6,2 Н =∙ 0,8�� �,� ∙ �,� (5) � �� ���Н � ∙ ��П� � 2.2. Вывод: допустимая скорость, видимости а а� � а соответствующая (6) +�t� ,а ��П , (3) SSОуд==(t1�� 2 а+ 0,5t3) ��а� � �,� �� ∙ �а дороги на месте ДТП SВ′ = 45 метров, составляет 68 км/ч (18,9 м/с). � �,�� ∙ ���,����,�� � ��,� ��,�� Скорость ДТП 58,3==км/ч ��5 ∙ 16,2 � �,� +на��месте � +–21,08 39,3 м. Sуд +=0,2 (0,8 + автомобиля 0,5 ∙ 0,6) = 21,05 42,13(16,2 м. м/с) SО = движения �,� � ∙ ∙�,� ��,���,�� не превышала допустимую скорость при данной видимости дороги. � ��,� ∙ 6,2�= ,53 км/ч (14,7 м/с). VН = �26 ∙V�aПН 17,4 (5) (1)(9) �26� =�а �∙а J√∙a26 t∙1 t=3∙ + 0,8а= ю13,0 м; S=1∙1,8 �,� �,� По 3-му вопросу �� � �Н �� ∙ �П � = ���∙ 16,5 � � =а ��,� � = ,58,3 км/ч (6) Va = 3.1. 1,8 ∙Исследование 6,2 ∙ 0,6 +�26Sналичия ∙ 6,2 6,7 + 51,6 (16,2 м/с). уд S2р = �а а∙ уt2рводителя = ��а 0,4автомобиля =�а�� 4,9П м; КАМАЗ-5320, (10) �,� �,� � совершившего ДТП, технической возможности избежать наезда на � �,�� ∙ ���,����,�� � ∙ 16,2 �∙ T �� � ∙ �В � 1� � 1 �, = 39,3 м. Sуд =V��5 �а ��,� = 3,6J (2)= � ∙ �,� ��,���,�� доп a � пешехода путем экстренного торможения проводим путем сравненияL = 0,005 ∙ 7,435 ∙ = 0,60 м; La�а–∙ длина автомобиля КАМАЗ-5320, ∙ La ∙ � a �,� �,� �а ��,� 35 м с остановочным путем S . значений видимости пешехода ∙∙tJ1Sa=В∙ = 0,8 = 13,0 м; (9) t + � , (1) VSa 1==1,8 �26� 3 О а ю �,� ��а� �� � ∙ �� �,� торможении в данных дорожных усло= К , (12) X 3,6 ∙ 6,2 ∙ 0,8��путь при � 1 � 1� = 17,6 ∙ 3,87 = 68 км/ч (18,9 м/с). Vдоп =Остановочный � Ф М ��,� � � ��а �,� ∙ �,� V ∙ 6,2 ∙ 0,6 +�26 ∙=6,2 ∙∙ 16,5 S2р t2р = = 6,7 0,4 + =�51,6 4,9 м;= 58,3 км/ч (16,2 м/с). (10) a = 1,8 виях равен �,� �,� ∙ La ∙ �а �а� � 0,5t ∙ ∙��,�� = (tм;1 �+L∙at��,� ) = 24,9 � м. ,КАМАЗ-5320, La =(3)(3) О 1,2� В 3автомобиля = 0,005 ∙ 7,435 V∙ X=Ф=S3,6J –2 + длина =0,60 �� ��,� 1 � �� 1 �,∙ �а (2) �,� �,� доп a ∙ T �,�� � ∙ �,�� �а ��,� � � �а ∙ � где t1 – время реакции водителя, t��,� = �0,8 с; t2 – время срабатывания ��,� 1 ��а� �� = (0,8 21,05м.+ 21,08 = 42,13 м.(12) ПриSОэтом S +−0,2 S1 +− 0,5 S ∙=0,6) 39,3 −= 13 − ==, 21,4 К+М�� XФ�,� � 4,9 ∙��,� �� время �� тормозов, УД t2 = 0,2 с;2рt�3 ∙ – нарастания замедления, t3 = 0,6 с; � 1 � 1� = 17,6 ∙ 3,87 = 68 км/ч (18,9 м/с). Vдоп = 3,6 ∙ 6,2 ∙ 0,8�� � �,� ∙ �,� При подстановке принятых значений в неравенство (8)ско-имеем Jа – установившееся замедление, J∙ а17,4 = 6,2 м/с=2;53 Vaкм/ч – расчетная � ∙ �,�� VН = �26 ∙ �ПН ∙ �а �� 26 ∙ 6,2 (14,7 м/с). (5) ∙ ��,� √ X = 1,2� = 24,9 м. Ф рость движения автомобиля КАМАЗ-5320, = (16,2 м/с). �а Vусловие �а�58,3 км/ч �,�� ∙ �,�� неравенство 24,9 м > 21,4 м,S из= чего следует, что безопасного объезда a (t1 + t2 +��0,5t (3) � , О 3)�� ∙ �� а � �Н �,� вП �выражение �� ∙ �а , S=уд = ��−� �13 При подстановке принятых значений (3) получим (6) а� При этом S − S − S 39,3 − 4,9 = 21,4 м. �� �� � УД 1 2р а а П автомобилем КАМАЗ-5320 пешехода не выполняется. ��,� ��,�� �=в21,05 (0,8 + 0,2 + 0,5 ∙ 0,6) + 42,13имеем м.избежать S При подстановке принятых неравенство �,�� ∙ значений ���,����,�� � + 21,08 = (8) О= Следовательно, водитель возможности ∙ �,� � ∙ 16,2 � не �,�имел�� технической = 39,3 м. Sуд = ��5 � ∙ �,� ��,���,�� неравенство 24,9 м > 21,4 м, из чего следует, что условие безопасного объезда Из сравнения видимости ′ = 35 м с останонаезда на пешехода VН =путем ∙его �ПНобъезда. ∙ ��аа � ∙ 17,4пешехода ∙ 6,2 = 53Sкм/ч (14,7 м/с). (5) �26значений √26 В ��,� = ∙ t = 0,8 = 13,0 м; (9) S автомобилем КАМАЗ-5320 пешехода не выполняется. 1 1 вочным путем SО = 42,13 �,� м следует, �,�что S�О > SВ′. Следовательно, при 4.2. Вывод: в данной дорожной обстановке автомобиля КАМАЗ��а � �Н � ∙ �водитель � П Sуд =не � � ��,� � возможности , Следовательно, водитель имел технической избежать (6) ��� а � а ��а �а ��П ∙ t2р = избежать 0,4 = 4,9 м; на пешехода путем (10)его 2р = 5320 не имел технической Sвозможности наезда �,� �,� наезда на пешехода путем его объезда. 137 — � �,��— ∙ ���,����,�� � � = 39,3 м. Sуд = ��5 � ��,� ∙ 16,2 � ∙ �,� автомобиля ��,���,�� Вывод: в данной водитель автомобиля КАМАЗ∙ а = 4.2. 0,005 ∙ 7,435 ∙ =дорожной 0,60 м; Laобстановке – �длина КАМАЗ-5320, La = ∙ Laобъезда. �,� �,� �а ��,� 134 данной видимости препятствия (пешехода) водитель автомобиля КАМАЗ-5320 не имел технической возможности остановиться перед местом нахождения пешехода в момент его обнаружения водителем, так как остановочный путь автомобиля SО = 42,13 м больше расстояния видимости препятствия SВ = 35 м. Учитывая, что пешеход двигался в том же направлении, что и автомобиль, необходимо исследовать, мог ли пешеход покинуть опасную зону. 3.2. Путь, пройденный состояJa ∙ t3 + �26�а �вюзаторможенном , (1) Va = 1,8 ∙ автомобилем нии после наезда до остановки Va = 1,8 ∙ 6,2 ∙ 0,6 +�26 ∙ 6,2 ∙ 16,5 = 6,7 + 51,6 = 58,3 км/ч (16,2 м/с). 1,8 t3 + �26� (1) a ∙ 10,8 S = S V″a += L + ∙СJ= + 5,04 (4) а �+ ю ,1,25 = 17,4 м, ПН ю � � ∙ �В L1 + LV = + 1,85 = м – +колесная базакм/ч автомобиля КА= 3,6J ��5,04 � 1 51,6 �1= �, 58,3 (2) доп3,19 a ∙ ∙T16,5 Va =где 1,8L ∙=6,2 ∙ 0,6 ∙ 6,2 (16,2 м/с). 2 +�26 � �а= ∙ �6,7 МАЗ-5320; L1 – расстояние от переднего до среднего моста, L1 = 3,19 м; � ∙ �В� L2 – расстояние от=среднего до заднего � ∙ ��a ∙ T �� 3,6J � 1моста, � 1 �,L2 = 1,85 м; С – рассто(2) V доп �1� Vдоп = 3,6 ∙ 6,2 ∙ 0,8�� �а ∙1� � � = 17,6 ∙ 3,87 = 68 км/ч (18,9 м/с). � �,� ∙ �,� = 1,8 ∙ J ∙ t + V яние от передней части моста, С,= 1,25 м; Sю″ – длина (1) �26� a до переднего a 3 а �ю тормозного следа от наезда до остановки ТС, � ∙ �� � �а� Sю″ = Sю − Sю′ = 16,5 3,6 � 1∙t� ==17,6 ∙ 3,87 =, 68 км/ч (18,9 м/с). VдопV= = �∙(t6,2 +1�0,5t ) а +� (3) SО∙ �,� 1,8∙ 6,2 ∙ 6,2∙ 0,8�� ∙ 0,6 +�26 51,6 58,3 км/ч (16,2 м/с). 1+ 216,5 36,7 a= �,� �,� �� �а начала торможения − 5,7 = 10,8 м; Sю′ – длина тормозного следа∙ от до места наезда, Sю′ = 5,7 м��,� (см. рис.). � ∙ �В�� �а ��,� �� ∙ Tt2 �� +доп 0,5 + 0,5t =1 21,05 SО = (0,8 + 0,2 V =0,6) (t1a +�,� � � а1+�,, 21,08 = 42,13 м. (3)(2) S=О∙ 3,6J 3�) � � ∙ � �� �,� а �,� �� ∙ �а Скорость автомобиля при наезде на пешехода � ��,� 26��,� (5) VН =0,2 ∙ 17,4 ∙21,05 6,2 = +5321,08 км/ч (14,7 м/с). (5) ∙ �ПН �26 а � √+ �∙∙ ��� + 0,5 ∙ 0,6) 42,13 м. м/с). О= = (0,8 3,6 ∙+6,2 ∙ 0,8�� � 1 � 1� ==17,6 ∙ 3,87 = 68=км/ч (18,9 VSдоп �� ∙ �,� �,� � �,� ∙ �,� � Удаление автомобиля от места наезда когда водитель ��а � � � Н � ∙ �П в момент, � = 53�,км/ч (14,7 м/с). (5) (6) уд = ��� �а � VН = �26 ∙ �SПН ∙ �а � √26пешехода, ∙ 17,4 ��а ∙ 6,2 �� � а П имел возможность обнаружить � � (3) SО = (t1 + t2 + 0,5t3�) а � а , �,� ���� ∙ �а �,�� ∙ ���,����,�� ��а � �Н �� ∙ � П � � = 39,3 м. Sуд = ��5 ∙ 16,2 (6) Sуд = ��� �а �� ∙ �,� � , (6) ��а � ��,���,�� �а ��П ��,� ��,� + = 21,05 + 21,08 = 42,13 м. SО = (0,8 + 0,2 + 0,5 ∙ 0,6) � �� ∙ �,� �,� ��,� а �,�� ∙ ���,����,�� � м; где SВ – видимость пешехода, 35 м;� =VН13,0 автомобиля при 0,8 (9) S1 = � �,� ∙ t1 S=В = � – скорость = 39,3 м. Sуд = ��5 ∙ 16,2 �,� � ∙ �,� ��,���,�� наезде наVпешехода, VПН = 53 км/ч (14,7 м/с); V – расчетная скорость ∙ � � 26 ∙ 17,4 ∙ 6,2 = 53 км/ч (14,7 м/с). (5) √ Н = �26 ∙ � Н a �а а ��,� � а ∙ t2р =��,� 0,4 SS2р1 = =КАМАЗ-5320, = 4,9 м; (10) движения автомобиля V = 58,3 км/ч (16,2 м/с). �13,0 м;� (9) a= �,� ∙ t1 = �,� �,� ��0,8 а� � Н � ∙ �П �,� Sуд = ��� �а �значений �уравнение , (6) При подстановке принятых в (6) имеем �� �� � а а П � ��,� �м; ��,� автомобиля а La – длина =S0,60 КАМАЗ-5320, L = ∙ La ∙ а = 0,005 ∙ 7,435 ∙ a ∙ �,�� t2р =∙ ���,����,�� 0,4 = �4,9 м;� (10) 2р = �,� �,� �,� � = 39,3 м. Sуд = ��5 ∙ 16,2�,�� � ∙ �,�� ��,���,�� � ��,� ��а �� = 0,60 м;XФL�a=–Кдлина автомобиля КАМАЗ-5320, La(12) = ∙ La ∙ а = 0,005 ∙ 7,435 ∙ , � М ��,� �,� �,� а � Условие возможности наезда S1 = предотвращения ∙ t1 = � �0,8 = 13,0 м; (9) �,� �,� �� �� >аS�. (7) � ∙S�,�� уд ��,�О , (12) X� ∙���,� а= КМ� XФ = 1,2� ��24,9 S2р = Ф�,�� ∙ t∙ 2р = �= 0,4 =м.4,9 м; (10) �,�� �,� �,�от места наезда в момент, когСравним удаление автомобиля � �а этом водитель возможность обнаружить Sуд = 39,3 м, �− ∙ ��,� SУД − S1 имел −∙XS��,� 39,3 4,9 21,4 м. пешехода, 2р== =да 0,005 ∙ 7,435 = 0,60 м;13La−∙–�,�� длина автомобиля КАМАЗ-5320, La = ∙ La ∙При 1,2� == 24,9 м. �,� Ф �,� �,�� ∙ �,�� При подстановке принятых значений в неравенство (8) имеем � —4,9 138 — а �� м. При этом SУД − S1 − S2р = 39,3 − X 13 − =�� 21,4 , (12) Ф = КМ� что условие неравенство 24,9 м > 21,4 м, из чего следует, безопасного объезда � �� При подстановке принятых значений в неравенство (8) имеем автомобилем КАМАЗ-5320 пешехода не выполняется. � и остановочный путь SО = 42,13 м. Видим, что Sуд < SО. Следовательно, водитель автомобиля не имел технической возможности предотвратить наезд на пешехода ∙ Ja ∙ t3торможения. + �26�а �ю , (1) Va = 1,8путем Поскольку расчетная скорость движения автомобиля КАVМАЗ-5320, 0,6 +�26 ∙ 16,5 + 51,6 = 58,3 км/ч (16,2 меньм/с). (1) a = 1,8 ∙ 6,2 ∙равная (16,2 м/с), по значению VaV∙=a6,2 =58,3 1,8 ∙км/ч Ja = ∙ t36,7 + �26� а �ю , ше допустимой скорости движения из условия видимости дороги � ∙ �В� = м/с), 3,6J∙a 6,2 ∙вTисследовании �� �6,7 1 +�второй 1 �, = 58,3 1,8 6,2 ∙ V 0,6 ∙ 16,5 = 51,6 км/ч (16,2 м/с). доп+�26 a == � VVдоп 68∙ км/ч (18,9 части вопроса нет(2) �а ∙ � технической необходимости. � ∙ �В� =� ∙3,6J � 1 � 1 �,водитель автомоби- (2) Vвдоп �� a ∙ T �� 3.3. Вывод: данной дорожной ситуации � � 1 � 1�а ∙ =� �17,6 ∙ 3,87 = 68 км/ч (18,9 м/с). Vдоп = 3,6 ∙ 6,2 ∙ 0,8�� �,� ∙ �,�� ля КАМАЗ-5320 не имел технической возможности предотвратить � ∙ �� �а� а наезд на пешехода путем так как(18,9 остано∙ 6,2 ∙ 0,8�� �t21+�0,5t 1� 3=) �торможения, 17,6 км/ч м/с). V доп = 3,6 (tэкстренного � ∙ 3,87 , = 68 (3) S�,� О =∙ �,� 1� + �,� �� ∙ �а вочный путь больше удаления ТС до места наезда в момент, когда �а �а� ��,� ��,�� водитель увидеть t2 + 0,5t= )Va21,05 � , (3) S0,6) + 0,2 + 0,5 ∙пешехода. + 21,08 = 42,13 SО = (0,8мог О = (t1 + + 3V = 1,8 �юю,, �26�аа�м. ��∙∙∙J �Jаaa∙∙tt33++�26� �� ∙ �,� �,� �,� a = 1,8 По 4-му вопросу ��,� ��,�� ∙ 6,2 = 53 км/ч (14,7 м/с). VН =+�26 ∙Va�a0,5 ∙∙ �0,6) ∙ 17,4 (5) км/ч V+ = 6,2 +�26 6,2 ==6,7 ==58,3 √∙26 =1,8 1,8 6,2 ∙0,6 0,6 +�26=∙∙21,05 6,2∙∙16,5 16,5 6,7 +51,6 51,6м. 58,3 км/ч(16,2 (16,2 ПН а∙∙� 0,2 + + 21,08 =+ 42,13 S4.1. О = (0,8 Условие безопасного�,�объезда �� ∙ �,� автомобилем КАМАЗ-5320 � ��а � �Н � ∙ �П � � пешехода выглядитSкак �∙ ∙��ВВ� =неравенство �� � ∙ T= , �км/ч а� VН = �26 ∙ уд �ПН ∙ ��а �� ∙ �� 17,4 ∙ 6,2 53 (14,7 == 3,6J � 11 � 11�,�, (6)(5) VVдоп √26 TП�� �� � �м/с). доп а 3,6Jaa�а∙�� ��аа∙ ∙���� XФ < (SУД − S1 − S� 2р�), (8) ��а � �Н � ∙ �П� � �,�� ∙ ���,����,�� S = �� � � � , = ��5 ∙ 16,2 � � = 39,3 м. S уд уд � �а ∙ �,� �а�∙��,���,�� где S1 – расстояние, проходимое ТС за��время реакции водителя, м, (6) ∙�� �� � а ��П = 3,6 ∙ 6,2 ∙ 0,8�� � 1 � 1� = VVдоп = 3,6 ∙ 6,2 ∙ 0,8�� � 1 � 1� =17,6 17,6∙∙3,87 3,87==68 68км/ч км/ч(18,9 (18, доп �,� �,��∙ ∙�,� �,��� �а �,�� ∙ ���,����,�� ��,� � (9)(9) 0,8 = 13,0 м;, = 39,3 м. 1 = � ∙ t1 = � Sуд = ��5 ∙ S16,2 �,� ��,� ∙ �,� ��,���,�� ��аа ��а�а� = (t + t + 0,5t ) � ,, S = (t + t + 0,5t ) � S ОО 11 22 33 � ��,� �,� �� �,�рулевого ��∙ ∙��аа S2р – расстояние, проходимое ТС за0,4 время срабатывания ��,� S2р S=1 =а �∙аt2р∙ t= = 4,9 м; (10) = 0,8 = 13,0 м; (9) �,��,� 1 �,��,� управления t2р, м, ��,� ��,� ��,� ��,��� ++0,5 SSОО==(0,8 (0,8++0,2 0,2��,� 0,5∙∙0,6) 0,6) �,� ++�� ∙ �,� ==21,05 21,05++21,08 21,08==42,13 42,13м � ��,� �� ∙ �,� �,� КАМАЗ-5320, а – длина = 0,60 м;�L автомобиля La =(10) ∙ La ∙ а = 0,005 ∙ 7,435 ∙ a∙ t2р = ; (10) S = 0,4 = 4,9 м; 2р �,� �,� �,� �,� VVНН==�26 � √√26 26∙∙17,4 17,4∙∙6,2 6,2==53 53км/ч км/ч(14,7 (14,7м/с м/ �26�t∙∙��ПН ПН∙∙��аа � реакции водителя; �а t1 = 0,8 с – время ��,� ��а 2р ��= 0,2…0,4 с для легковых ав= 0,005 ∙ 7,435 ∙ = 0,60Xм; L – длина автомобиля КАМАЗ-5320, L = ∙ La ∙ a a =К , �,� томобилей, принимаем �,� � (12) ��а ����Н ����∙ ∙��ПП t2р Ф= 0,3Мс.� � ��S = �� � � �� �� � ,, Sудуд = ���� �аа � а ��Н �� � �� � аа аа �� ПП При условии, что наезд произошел части ��а� ��серединой передней � ∙ �,�� � ∙X ��,� = К , (12) � � Ф М � �,�� ∙ ���,����,�� � �,�� ∙ ���,����,�� � �� м.объезда пешехода необXФ = 1,2� Sдля 24,9 автомобиля КАМАЗ-5320, безопасного ��5 ∙∙�16,2 � �� ==39,3 ��5= 16,2 � 39,3м. м. Sудуд∙== �,�� �,�� ��∙ ∙�,� ��,���,�� �,� ��,���,�� ходимо обеспечить поперечное смещение � �13 ∙ ��,� ∙ �,�� ��,� При этом SУД − S1 − S2р − 4,9 = 21,4 м.��м. ��,� аа XФ== =39,3 1,2�− + ∙∙tt11===1,85 0,8 м; SS24,9 0,8 13,0(11) м; 11==+ 0,6 Y 0,5В ∆ = 0,5 ∙=2,50 м, ==13,0 �,� �,� М а �,��б ∙ �,�� �,� �,� При гдеподстановке принятых значений в неравенство (8) имеем Ва –S ширина автомобиля КАМАЗ-5320, B = 2,50 �� ��,� ��,� м; ∆б – безаа a При этом м. УД − S1 − S2р = 39,3 − 13 − 4,9 = SS2р21,4 м; 0,4==4,9 4,9 м; 2р==�,� ∙∙tt2р 2р== �,� 0,4 неравенство 24,9 м >боковой 21,4 м, из чего следует, условие безопасного объезда опасный интервал междучто автомобилем и пешеходом, �,� �,� При подстановке принятых значений в неравенство (8) имеем ��аа ��,� автомобилем пешехода не выполняется. == 0,005 ∙∙∙7,435 ∙∙ ��,�= 0,60 м; LLaaa– ––длина длина автомобиля ∆б =КАМАЗ-5320 0,005∙∙L∙LL 0,005 7,435 ∙ = 0,60 м; 7,435 = 0,60 м;L длинаавтомобиля автомобиляКАМАЗ-532 КАМАЗ-532 aa∙a∙∙ �,� �,� �,� м, из чего следует, �,� что условие неравенство 24,9 м > 21,4 безопасного объезда Следовательно, водитель нем;имел технической возможности избежать КАМАЗ-5320, La = 7,435 V – скорость автомобиля КАМАЗ-5320, � �� ��аа��� � � автомобилем КАМАЗ-5320 пешехода aне выполняется. = К , X � = К , X � Ф М Ф М Va = 58,3 км/ч (16,2 ������ наезда на пешехода путем его м/с). объезда. Следовательно, водитель не имел технической возможности избежать — 139 — водитель ��∙ �,�� 4.2. Вывод: в данной дорожной обстановке КАМАЗ��∙ ∙��,� ��,�автомобиля ∙ �,�� XXФФ==1,2� наезда на пешехода путем его объезда. 1,2� �,�� ∙ �,�� ==24,9 24,9м. м. �,�� ∙ �,�� 5320 не имел технической возможности избежать наезда на пешехода путем его 4.2. Вывод: в данной дорожной обстановке водитель автомобиля КАМАЗ- VН = �26 ∙ �ПН ∙ �а � √26 ∙ 17,4 ∙ 6,2 = 53 км/ч (14,7 м/с). ∙ La ∙ �а �,� �а ��,� ��а �=�Н4,9∙ �м; S2р = S ∙=t2р П ���=�а�,�� 0,4 � �,� уд �� ��а � (5) �,�� ∙ ���,���� � Sуд = ��5 ∙ 16,2(10) , (6) � ∙ �,� �а ��П � ��,� S2р = а ∙ t2р = (12) �,� (9) (12) �,� ��,� а � = 0,005 ∙ 7,435 ∙ = 0,60 м; La –�,�� длина автомобиля ∙ ���,����,�� � КАМАЗ-5320,SL1 a==�,� ∙ t1 = Минимальное продольное = ��5 ∙ 16,2 � расстояние для � маневра = 39,3 м. Sуд�,� SX1 Ф= =�аК �,� � ∙ �,� �� ��а��,� � ∙Мt� 1= �� � �,� ��,���,�� , = 13,0 м; 0,8 � ��,� � �,� ��,� 0 0 ∙ аКМ == 0,005 ∙ 7,435 0,60 м; La – длина ∙ La��,� где КМ = ам + bмVa – коэффициент 1,12 + 0,005 ∙∙ �,� = = 1,20; �а � маневра, �,� � ∙=��,� ∙ t�,�� S ∙ = 0,4м.= 4,9 м; (10) 2р 2р X = 1,2� = 24,9 �,� �,� Ф ам = 1,12 и bм = 0,0050 – эмпирические коэффициенты, зависящие �,�� ∙ �,�� ��а �от ��,� а дорожного покрытия; φy –м; коэффициент сцепления КАМАЗ-5320, в поперечном X = 0,005 = 0,60 LaФ == КМ� � ∙ LПри a ∙ этом a – длина SУД −∙ 7,435 S1 − S∙2р�,� = 39,3 − 13 −L4,9 = 21,4 автомобиля м. �,� направлении, φy = 0,8φх = 0,8 ∙ 0,8 = 0,64; φх = 0,8 – коэффициент При сцепления подстановке принятых значений ��в�� неравенство (8) имеем � ∙ ��,�� ∙ �,�� в продольном направлении. XФ = 1,2� (12) = XФ = КМ� а � , �,�� ∙ �,�� � �� Примподстановке уравнение (12) имеем неравенство 24,9 > 21,4 м, извчего следует, что условие безопасного объезда � ∙ ��,�� ∙ �,��При этом SУД − S1 − S2р = 39,3 − 13 − 4,9 = автомобилем КАМАЗ-5320 пешехода XФ = 1,2�не выполняется. = 24,9 м. �,�� ∙ �,�� При подстановке принятых значени Следовательно, водитель не имел технической возможности избежать S2р39,3 = 39,3 134,9 − 4,9 = 21,4 м. м > 21,4 м, из чего следует, ч ПриПри этомэтом SУД −SУД S1−−SS1 2р− = − 13−неравенство − = 21,4 м. 24,9 наезда на пешехода путем его объезда. При подстановке принятых значений в неравенство (8) имеем При подстановке принятых значений в КАМАЗ-5320 неравенство (8) имеем автомобилем пешехода не выпол 4.2. Вывод: в данной дорожной обстановке водитель автомобиля КАМАЗнеравенство 24,9 > 21,4 м, из чего следует, что условие безопасного неравенство 24,9 м > 21,4 м, из чего следует,Следовательно, что условие безопасного водитель объезда не имел техн объезда автомобилем КАМАЗ-5320 пешехода 5320 не имел технической возможности избежать наезданенавыполняется. пешехода путем его автомобилем КАМАЗ-5320 пешехода выполняется. Следовательно, водитель не не имел технической возможности изнаезда на пешехода путем его объезда. объезда. бежать наезда на пешехода путем его объезда. Следовательно, водитель не имел технической избежать 4.2. Вывод:возможности в данной дорожной обстановк 134 обстановке 4.2. Вывод: в данной дорожной водитель автомобиля наезда на пешехода путем его объезда. 5320 не имел технической возможности избежа КАМАЗ-5320 не имел технической возможности избежать наезда на 4.2. Вывод:путем в данной дорожной обстановке объезда. водитель автомобиля КАМАЗпешехода его объезда. 5320 не имел технической По 5-му вопросу возможности избежать наезда на пешехода путем его 134 объезда. 5.1. В данной дорожной обстановке пешеход Резник И.С. должен был руководствоваться требованиями пункта 4.1 ПДД РФ: «Пе134 шеходы должны двигаться по тротуарам, пешеходным дорожкам, велопешеходным дорожкам, а при их отсутствии – по обочинам... При отсутствии тротуаров, пешеходных дорожек, велопешеходных дорожек или обочин, а также в случае невозможности двигаться по ним пешеходы могут двигаться по велосипедной дорожке или идти в один ряд по краю проезжей части (на дорогах с разделительной полосой – по внешнему краю проезжей части). При движении по краю проезжей части пешеходы должны идти навстречу движению транспортных средств… При переходе дороги и движении по обочинам или краю проезжей части в темное время суток или в условиях недостаточной видимости пешеходам рекомендуется, а вне населенных пунктов пешеходы обязаны иметь при себе предметы со световозвращающими — 140 — элементами и обеспечивать видимость этих предметов водителями транспортных средств». Поскольку в данной ДТС пешеход двигался попутно с транспортным средством, совершившим наезд, и на удалении от края проезжей части, его действия не соответствовали требованиям п. 4.1 ПДД РФ. 5.2. В данной дорожной обстановке водитель автомобиля КАМАЗ-5320 Нинов Н.Н. должен был руководствоваться требованиями пункта 10.1 ПДД РФ: «Водитель должен вести транспортное средство со скоростью, не превышающей установленного ограничения, учитывая при этом интенсивность движения, особенности и состояние транспортного средства и груза, дорожные и метеорологические условия, в частности видимость в направлении движения. …При возникновении опасности для движения, которую водитель в состоянии обнаружить, он должен принять возможные меры к снижению скорости вплоть до остановки транспортного средства». Водитель Нинов Н.Н. двигался со скоростью, не превышающей установленных ограничений в соответствии с условиями видимости дороги в направлении движения, поэтому в его действиях отсутствует противоречие с требованиями первой части п. 10.1 ПДД РФ. Водитель Нинов Н.Н. не имел технической возможности предотвратить наезд на пешехода путем своевременного экстренного торможения, поэтому в его действиях нет противоречий с требованиями второй части п. 10.1 ПДД РФ. ВЫВОДЫ 1. Непосредственно перед торможением автомобиль КАМАЗ-5320 двигался со скоростью около 58,3 км/ч. 2. Скорость движения автомобиля КАМАЗ-5320 перед ДТП не превышала предельно допустимую скорость при данной видимости дороги 45 метров. 3. В данной дорожной ситуации водитель автомобиля КАМАЗ-5320 не имел технической возможности предотвратить наезд на пешехода путем экстренного торможения при видимости препятствия 35 метров. 4. В данной дорожной обстановке водитель автомобиля КАМАЗ5320 не имел технической возможности избежать наезда на пешехода путем его объезда. — 141 — 5. В данной дорожной обстановке пешеход Резник И.С. должен был руководствоваться требованиями пункта 4.1 ПДД РФ. Его действия не соответствовали требованиям данного пункта Правил. В данной дорожной обстановке водитель автомобиля КАМАЗ5320 Нинов Н.Н. должен был руководствоваться требованиями первой и второй частей пункта 10.1 ПДД РФ. Его действия соответствовали требованиям данного пункта Правил. 5.4.2. Исследование наезда транспортного средства на пешехода при встречном движении Основанием для проведения экспертного исследования является постановление следователя СУ при Управлении МВД России по г. Тольятти капитана полиции Петрова П.П. от 18 февраля 2017 года о назначении автотехнической экспертизы по материалам уголовного дела № 24/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ, приведенное ниже. ПОСТАНОВЛЕНИЕ о назначении автотехнической экспертизы г. Тольятти 18 февраля 2017 г. Следователь СУ при Управлении МВД России по г. Тольятти капитан полиции Петров П.П., рассмотрев материалы уголовного дела № 24/2017, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ, УСТАНОВИЛ: 26 декабря 2016 г. в 19 час 00 мин при следовании по Слесарному проезду со стороны ул. Транспортной в направлении ул. Коммунальной г. Тольятти водитель Терентьев Т.Т., управляя технически исправным автомобилем ВАЗ-2111, совершил наезд на пешехода Солудана С.П., причинив ему тяжкие телесные повреждения. Автомобиль ВАЗ-2111 двигался со скоростью 40 км/ч (11,1 м/с) и совершил наезд на пешехода, двигавшегося во встречном направлении, в процессе торможения. В месте ДТП на дорожном полотне имеется двойной тормозной след длиной 18,0 метра. Дорожные условия на момент ДТП: покрытие асфальтированное с укатанным снегом; профиль дороги горизонтальный; ширина проезжей части 7 метров; движение двустороннее. Наезд произошел передней — 142 — частью автомобиля ВАЗ-2111 на расстоянии 1,0 метра от правой боковой поверхности. Место наезда на пешехода находится на расстоянии 6,0 метра от начала тормозного следа. Пешеход двигался во встречном направлении в темпе быстрого шага со скоростью 6,4 км/ч (1,78 м/с). Автомобиль технически исправен, без груза. Момент возникновения опасности для движения водителя принять с момента появления пешехода в зоне видимости водителя автомобиля ВАЗ-2111 на расстоянии 32 метра. Видимость в направлении движения составляет 50 метров. На основании изложенного и руководствуясь ст. 195 (196) и 199 УПК РФ, ПОСТАНОВИЛ: 1. Назначить по настоящему делу автотехническую экспертизу, производство которой поручить ЭКЦ ГУ МВД России по Самарской области. 2. На разрешение эксперта поставить следующие вопросы: 1) с какой скоростью двигался автомобиль ВАЗ-2111 перед ДТП; 2) какова допустимая скорость движения ТС при видимости дороги 50 метров; 3) имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения в условиях видимости пешехода 32 метра при расчетной скорости и при скорости, соответствующей видимости дороги; 4) имел ли водитель ТС техническую возможность избежать наезда на пешехода путем его объезда при расчетной скорости и при скорости, соответствующей видимости в направлении движения; 5) какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ. 3. Руководителю ЭКЦ разъяснить эксперту права и обязанности по ст. 57 УПК РФ и предупредить его об уголовной ответственности по ст. 307 УК РФ. Следователь _____________________________ Петров П.П. — 143 — ЗАКЛЮЧЕНИЕ ЭКСПЕРТА по уголовному делу № 99/2017 о наезде автомобиля КАМАЗ-5320 под управлением Нинова Н.Н. на пешехода г. Тольятти 27 марта 2017 г. ВВОДНАЯ ЧАСТЬ 06 марта 2017 г. в ЭКЦ ГУ МВД России по г. Тольятти при постановлении капитана полиции Петрова П.П. поступили материалы уголовного дела № 99/2017 о наезде автомобиля ВАЗ-2111 под управлением Терентьева Т.Т. на пешехода Солудана С.П. для проведения автотехнической экспертизы. На разрешение эксперта поставлены следующие вопросы: 1. С какой скоростью двигался автомобиль ВАЗ-2111 перед ДТП? 2. Какая допустимая скорость движения ТС при видимости дороги 50 метров? 3. Имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения в условиях видимости пешехода 32 метра при расчетной скорости и при скорости, соответствующей видимости дороги? 4. Имел ли водитель ТС техническую возможность избежать наезда на пешехода путем его объезда при расчетной скорости и при скорости, соответствующей видимости в направлении движения? 5. Какими пунктами ПДД РФ должны были руководствоваться участники ДТП и соответствовали ли их действия требованиям ПДД РФ? Проведение экспертизы поручено эксперту Сидорову С.С., имеющему среднее профессиональное автотехническое образование. ПОДПИСКА Мне, эксперту Сидорову С.С. разъяснены права и обязанности эксперта, предусмотренные ст. 57 УПК РФ. Об уголовной ответственности за дачу заведомо ложного заключения по ст. 307 УК РФ предупрежден. Эксперт ______________ Сидоров С.С. — 144 — ИСХОДНЫЕ ДАННЫЕ К ЭКСПЕРТНОМУ ИССЛЕДОВАНИЮ ДТП (приняты из постановления о назначении автотехнической экспертизы) 1. Обстоятельства ДТП: 26 декабря 2016 г. в 19 час 00 мин при следовании по Слесарному проезду со стороны ул. Транспортной в направлении ул. Коммунальной г. Тольятти водитель Терентьев Т.Т., управляя технически исправным автомобилем ВАЗ-2111, совершил наезд на пешехода Солудана С.П., причинив ему тяжкие телесные повреждения. 2. Дорожные условия: состояние дорожного покрытия – ровное асфальтовое покрытие с укатанным снегом; ширина проезжей части 7,0 метра для двустороннего движения; профиль дороги горизонтальный. 3. Наличие следов транспортного средства: имеется двойной след торможения длиной 18,0 метра. 4. Расположение места наезда на пешехода: место наезда расположено на расстоянии 6,0 метра от начала тормозного следа. 5. Условия видимости: видимость в направлении движения 50 метров. 6. Скорость движения транспорта: автомобиль ВАЗ-2111 двигался, со слов водителя, со скоростью 40 км/ч; в процессе исследования необходимо уточнить значение скорости. 7. Степень загруженности транспорта: автомобиль ВАЗ-2111 без груза. 8. Техническое состояние транспорта: автомобиль ВАЗ-2111 технически исправен; автомобиль имеет колеса с шипованными зимними шинами. 9. Возраст и пол пешехода: мужчина в возрасте 62 лет. 10. Направление движения пешехода по отношению к ТС (справа, слева, попутное, встречное): пешеход двигался во встречном направлении. 11. Темп движения и (или) скорость движения пешехода: пешеход двигался быстрым шагом со скоростью 6,4 км/ч. 12. Условия видимости пешехода с места водителя: видимость с места водителя ограничена и составляет 32 метра. 13. Какой частью ТС произошел наезд на пешехода (передней частью, боковой частью): наезд произошел передней частью автомобиля ВАЗ-2111 на расстоянии 1,0 метра от правой боковой поверхности. — 145 — 14. Какой момент принять за момент возникновения опасности для движения водителя: за момент возникновения опасности для движения принять момент появления пешехода в поле зрения водителя автомобиля ВАЗ-2111 на расстоянии 32 метра. 15. Схема ДТП приведена на рисунке 1. ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА 1. Инструкция по организации производства судебных экспертиз в государственных судебно-экспертных учреждениях системы Министерства юстиции Российской Федерации. Утверждена Приказом Министерства юстиции Российской Федерации от 20 декабря 2002 № 347. – URL: ceur.ru/library/docs/departmental_requlations/ item 132780. 2. Иларионов, В.А. Экспертиза дорожно-транспортных происшествий : учебник для вузов / В.А. Иларионов. – М. : Транспорт, 2013. – 255 с. 3. Суворов, Ю.Б. Судебная дорожно-транспортная экспертиза. Судебно-экспертная оценка действий водителей и других лиц, ответственных за обеспечение безопасности дорожного движения, на участках ДТП : учебное пособие / Ю.Б. Суворов. – М. : Право и закон, 2013. – 208 с. 4. Домке, Э.Р. Расследование и экспертиза дорожно-транспортных 4. Домке, Э.Р. Расследование и экспертиза дорожно-транспортных происшествий : учебник для студ. высш. учеб. заведений / Э.Р. Домпроисшествий : учебник для студ. высш. учеб. заведений / Э.Р. Домке. – ке. – 2-е изд., стер. – М. : Академия, 2012. – 288 с. 2-е изд., стер. – М. : Академия, 2012. – 288 с. SВ = 32 м Sю = 18 м I Va × VП II III S'ю = 6 м Sуд Обводное шоссе Рис. 1. Схема наезда ТС на пешехода при встречном движении: Iдвижении: – ТС в момент Рисунок 1. Схема наезда ТС на пешехода при встречном I – ТС в момент появления пешехода в зоне IIвидимости водителя; появления пешехода в зоне видимости водителя; – ТС при наезде; III – ТС II – ТС при наезде; – ТС при× остановке; × – место наезда приIII остановке; – место наезда — 146 — ОБОЗНАЧЕНИЯ И ПРИНЯТЫЕ КОЭФФИЦИЕНТЫ: • Ba = 1,68 м – ширина автомобиля ВАЗ-2111; ОБОЗНАЧЕНИЯ И ПРИНЯТЫЕ КОЭФФИЦИЕНТЫ: • Ba = 1,68 м – ширина автомобиля ВАЗ-2111; • La = 4,285 м – длина автомобиля ВАЗ-2111; • L1 = 3,32 м – расстояние от передней части до оси задних колес автомобиля ВАЗ-2111; ◦ lx = 1,0 м – расстояние от правой боковой поверхности автомобиля ВАЗ-2111 до места удара пешехода; • t1 = 0,8 с – время реакции водителя; • t2 = 0,1 с – время срабатывания тормозов; • t3 = 0,15 с – время нарастания замедления до установившегося значения; • Ja = 2,9 м/с2 – установившееся замедление при торможении автомобиля ВАЗ-2111; ◦ Sю = 18,0 м – длина тормозного следа задних колес ВАЗ-2111; ◦ SВ′ = 50 м – видимость элементов дороги в направлении движения; ◦ SВ = 32 м – видимость препятствия (пешехода); ◦ Va1 = 40 км/ч (11,1 м/с) – скорость ВАЗ-2111, со слов водителя; ◦ VП = 6,4 км/ч (1,78 м/с) – скорость движения пешехода. Примечание: • – приняты из Приложений; ◦ – приняты из постановления о назначении экспертизы. ИССЛЕДОВАНИЕ По 1-му вопросу 1.1. Скорость движения автомобиля ВАЗ-2111 перед началом торможения (1) (1) Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , время установившегося значения, Va =где 1,8t3∙–2,9 ∙ 0,15нарастания + √26 ∙ 2,9замедления ∙ 18,0 = 0,8до + 36,8 = 37,6 км/ч (10,4 м/с). t3 = 0,15 с; Ja – установившееся замедление при торможении В 2; S – длина тормозного следа автомобиля ВАЗ-2111, Ja J= 2,9 �∙� м/с Vдоп = 3,6 � 1ю � 1 �, (2) aT � � �а ∙� � задних колес ВАЗ-2111, Sю = 18,0 м. ∙ Ja ∙ t3 + �26� (1) а �ю , При подстановке принятых в формулу (1) имеем: �∙V ��a = 1,8 значений � 1 � 1� = 5,0 ∙ 11,3 = 56,4 км/ч (15,6 м/с). Vдоп = 3,6 ∙ 2,9 ∙ 0,48 �� � �,� ∙ �,�� Va = 1,8 ∙ 2,9 ∙ 0,15 + √ 26 ∙ 2,9 ∙ 18,0 = 0,8 + 36,8 = 37,6 км/ч (10,4 м/с). � � �а следует, что перед тор1.2. Вывод: изSОрасчетного исследования �∙�Ва � t2 + V=доп(t1=+3,6 JaT0,5t ��3) �,� � 1���∙ �а1, �, (2) � можением автомобиль ВАЗ-2111�а ∙�двигался со скоростью около ��,� ��,�� 37,6 (0,8 (10,4 + 0,1 м/с). + 0,5 ∙ 0,15) SО =км/ч � ∙ ∙���,� + �� ∙ �,� = 10,2 + 18,8 = 29,0 м. � 1 � 1� = 5,0 ∙ 11,3 = 56,4 км/ч (15,6 м/с). Vдоп = 3,6 ∙ 2,9 ∙ 0,48 �� �,� ∙ �,��� � �� � —� �� 147 — Н� � П ��а ,� (4) Sуд = ��В �А � � �� �� � а � SО = (t1 + t2 + 0,5t3) � П а , V = �26 ∙ � �,� �� ∙ �а ∙ � � �26 ∙ 15,32 ∙ 2,9� = 34 км/ч (9,4 м/с). (5) По 2-му вопросу Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , 2.1. Допустимую скорость, соответствующую видимости дороги VaS= ∙ 0,15на+месте 2,9 ∙ 18,0 = 0,8 + 36,8 = 37,6 км/ч (10,4 м/с). √26 ∙ ДТП, ′ 1,8 = 50∙ 2,9 метров определим из зависимости В Vдоп = 3,6 JaT �� �∙�SВВ′ �а ∙� � � 1 � 1 �, (2) (1) (2) где T – время приведения в действие тормозов, T = t1′ + t2 + 0,5t3, � ∙ �� ∙ 2,9 реакции ∙ 0,48 �� водителя � 1 � 1� = 5,0 ∙ 11,3 = 56,4 км/ч (15,6 м/с). V с;доп t1′=–3,6 время �,� ∙ �,��� при расчетах допустимой скорости движения в данной ДТС, t1′ = 0,3 с; t2 – время срабатывания тормозов, �а �� (t1 + t2 + 0,5tзамедления � а ,до установившегося SО =нарастания 3) t2 = 0,1 с; t3 – время �,� �� ∙ �а Ja ∙ t3 + �26� , (1) a =′ 1,8 значения, t3 = 0,15 с;VS – ∙видимость в направлении движения а �ю � В ��,� ��,� = (0,8 + 0,1 + 0,5 ∙ 0,15) ∙ + = 10,2 + 18,8 = 29,0 м. S О элементов S26 = 50 м; �,�= 0,8��+∙ 36,8 �,� = 37,6 км/ч (10,4 м/с). Va = 1,8 ∙ 2,9дороги, ∙ 0,15 + √ В ∙ 2,9 ∙ 18,0 � + 0,5�∙ 0,15 = 0,48 с. T = t1′ + t2 + 0,5t3 = 0,3 0,1 ���∙� �� �+ Н� � П � 1 �, , уд = VSдоп = �� 3,6В � JaАT� �� В�� � 1 � (2) �� ��П а �а ∙� �значений После подстановки принятых в формулу (2) имеем V = �26 ∙ � ∙ � ��∙ ���26 ∙ 15,32 ∙ 2,9 = 34 км/ч (9,4 м/с). Н ПН а ∙ 2,9 ∙ 0,48 �� Vдоп = 3,6 �,� ∙ �,��� � 1 � 1� = 5,0 ∙ 11,3 = 56,4 км/ч (15,6 м/с). ���,���,��� ∙ �,�� (4) (5) � Sуд = �32 ∙ 10,� � . (7) �� �а ��,���,�� 2.2. Вывод: допустимая видимости 1,8 t3соответствующая +�а�26� (1) 0,5t∙�3)J∙ �,� , а �ю , SО = (t1 +Vat2=+скорость, a ∙� �,� �� ∙ �а дороги SВ′ = 50 метров на месте ДТП, составляет 56,4 км/ч (15,6 м/с). � ��а ��� ��,�18,0 ��,� Va =S1,8 ∙ 2,9+∙ 0,1 0,15 + √∙ 26 = 0,8 + 36,8 = 37,6 км/ч ,= 10,2 XФ∙ =2,9 + 0,5 0,15) ∙ КM∙ � + �� + 18,8 = 29,0 м. (10,4 м/с). (8) О = (0,8 Скорость движения автомобиля месте ∙ ��,� ДТП – 37,6 км/ч (10,4 м/с) – �,� на �� �∙�В �данной видимости не превышала допустимую скорость ��,� дороги. П J��a�T���Н����при 1 �, ��В=�3,6 , �+10,0035 SудV=доп маневра, К� �� � = 1,0 ∙ = 1,04;(4)ам и bм(2) где КМ = ам + bмVa – коэффициент А� ��а �а ∙�М �� �,� � П По 3-му вопросу � 1,8 ∙ J��,� = , м/с). (1) V�26 �26� a ∙∙ t2,9 3 += а �ю(9,4 = �26 ∙ �ПН ∙ �аS� (5) (12) V Остановочный =a� ∙а��при ∙∙ 15,32 t1 =торможении ∙ 0,834 = км/ч 8,4; 3.1. в данных дорожных = Н3,6 ∙ 2,9 ∙ 0,48 ��1путь Vдоп �,� � � 1 �,�� 1� = 5,0 ∙ 11,3 = 56,4 км/ч (15,6 м/с). ∙ �,�� ���,���,�� � равен Vусловиях 0,15 +√ 26 �,� ∙� 2,9 ∙ 18,0���,� =∙ �,�� 0,8� + 36,8 =. 37,6 км/ч (10,4 м/с). a = 1,8 ∙ 2,9 �а S∙ уд = �32 ∙ 10,� (7) ��,���,�� � S2р = t2р� ∙=�,� 0,3 = 3,1, (13) � � а а �,� �,� (3) � , SО = (t1 + t2 +�0,5t �∙�В3) �,� �� ∙ � Vдоп = 3,6 JaT �� �� � 1 � 1 �, (2) а � а � � ��а ∙� (8) XФ = КM��∙ ��,� ∙,�,� ��t � = � где t1 – время реакции водителя, 0,8 с; t – время срабатывания ��,� ��,� 2 м; = 1,04� ∙ 0,15)�,�� ∙ ∙1�,�� + = 18,9 = 10,2 +��,� 18,8 = 29,0 м. SО = (0,8 + 0,1X+Ф0,5 �� ∙ �,� замедления, �,� � ∙ �� тормозов, t = 0,1 с; t – время нарастания t3 = а0,15 3 bмV∙a22,9 – коэффициент маневра, К� 1,0 +5,0 0,0035 ∙ = 56,4 = 1,04; и bс; где КМV=допам=+3,6 М= м м/с). ∙ 0,48 �� � 1 1� = ∙ 11,3 км/чм (15,6 � �,� 2 �,� ∙ �,�� � � м/с Jа – установившееся замедление, Jа�� =Н�2,9 ; V – расчетная ско���� � � ∙ ��,� ∙ �,�� П a ��� �А � ��,� (4) XФSуд= =1,04� = �22,0 м., � �� �37,6 t1�,�� = ∙ �,�� ∙��0,8 = 8,4; (12) S1 = аВ ∙ ВАЗ-2111, а �V рость движения автомобиля � а a =� а П км/ч (10,4 м/с). �,� �,� , SО = (t1 + t2 + 0,5t3) � �,� в �� ∙ �а ПриVподстановке принятых (3) �а части ��,� Определим неравенства: SУДкм/ч − S1(9,4 − Sполучим �26значений =значение ∙� � ∙ 15,32 ∙ 2,9выражение = 34 м/с). (5) 2р = 27,3 − 8,4 �26 ∙ � правой Н ПНS2р а= �,� t2р = �,� ��,� 0,3 = �3,1, ��,� (13) � ∙ �,�� (0,8 + 0,1его + 0,5 ∙ ���,���,�� + м. = 10,2 18,8> =15,8, 29,0то м.XФ > (SУД − 3,1 = 15,8SОм.=Сравним с X∙Ф0,15) = 18,9…22,0 Так как�+18,9 �,� � ∙ �,� �� ∙ �,� Sуд = �32 ∙ 10,��� � . (7) ∙ ��,� � ∙=�,� 18,9 м; ��,���,�� XФ = 1,04� �� �,�� ∙ �,�� ), следовательно условия безопасного объезда пешехода (11) не − S1 − S2рИз �� �� � � � Н П сравнения Sзначений остановочного пути � , при торможении (4) уд = ��В �А � ��аа� �� �� ��П �� � S = 29,0 м и расстояния видимости пешехода в момент его обнаруК M� , (8) X �= ∙ ��,� ∙ �,�� выполняется. О �� XФ = 1,04�Ф =�22,0 м. �,�� ∙ �,�� жения Vводителем S = 32 м следует, что S > S . Однако сделать вы�26 = ∙ � ∙ � � ∙ 15,32 ∙ 2,9 = 34 км/ч (9,4 м/с). (5) �26 Н В автомобиля В О располагал технической ПН а 4.2. Вывод: водитель ВАЗ-2111 не ��,� водителя возможности Определим правой технической части неравенства: SУД+−0,0035 S − предотвратить S2р∙ = 27,3 8,4 ам и bм = оамналичии + bмVзначение коэффициент маневра, К =− 1,04; где Квод М a –у М = 1,0 � ���,���,�� ∙ �,�� � 1 �,� возможностью предотвратить наезд на пешехода путем маневра объезда S = �32 ∙ 10,� � � . (7) уд − 3,1 = 15,8 м. Сравним его с XФ = 18,9…22,0 м. Так как 18,9 > 15,8, то XФ > (SУД � ∙ ��,� �,� ��,���,�� � а 148 — — ∙ t1 = ∙ 0,8 = 8,4; (12) S1 =движения. пешехода при расчетной скорости �,� объезда пешехода (11) не − S1 − S2р), следовательно условия�,�безопасного ��а� �� , (8) XФ = К � M� ����,� выполняется. S2р = а t2р 159 = � 0,3 = 3,1, (13) �,� �,� �а ∙� � Va = 1,8 ∙ Ja ∙ t3 + �26�а �ю , � ∙ �� (1) = 3,6 ∙ 2,9 ∙ 0,48 � 1 �= 1� ∙ 11,3 = 56,4 (15,6 VVaдоп = 1,8 ∙ 2,9 ∙ 0,15 + �� ∙ 2,9 ∙ 18,0 0,8=+5,0 36,8 = 37,6 км/чкм/ч (10,4 м/с).м/с). √26 �,� ∙ �,��� �∙� торможения наезд на пешехода путем экстренного нет оснований, �� а 1 � V J T �� 3)В��� (2) � а 1 ,�, SОдоп==(t3,6 1 + t2a + 0,5t � ∙� а �,� �� ∙ � так как пешеход двигался во встречном направлении. а 3.2. Определим удаление ��,� ��,�� ВАЗ-2111 от места наезда � ∙ ��автомобиля (0,8∙ 2,9 + 0,1 + 0,5��∙ 0,15) ∙ � 1+ � 1� ==5,0 10,2 + 18,8 = 29,0 м.(15,6 м/с). SО==3,6 ∙ 0,48 ∙ 11,3 = 56,4 км/ч V доп �� ∙ �,� своего �,� � в момент обнаружения пешехода на полосе движения: �,� ∙ �,�� �� �� �� � � � Н П �а� �а,� SудS= =��(tВ �А+ � t2 + 0,5t , ��а3) �� О 1 � ��П �,� �� ∙ �а (4) (4) где SВ V –Нвидимость препятствия = 32 м; (9,4 VА –м/с). расчетная (5) � S = �26 ∙ �ПН ∙ �а � �26 (пешехода), ∙��,� 15,32��,� ∙ 2,9 =В34 км/ч = (0,8 + 0,1 + 0,5 ∙ 0,15) ∙ + = 10,2 + 18,8 = 29,0 м. S О скорость движения автомобиля ВАЗ-2111, ∙ �,�VA = 37,6 км/ч (10,4 м/с); �,� �∙ ∙ t�,�� 1,8 ∙ Ja�� (1) Va =���,���,�� �а �ю , 3 + �26� Sуд движения = �32 ∙ 10,�пешехода, � ��� ��НV�П��П= 6,4 � � км/ч .(1,78 м/с); VН – (7) VП – скорость � ∙ �,� ��,���,�� ��В∙�2,9 � + 36,8 , = 37,6 км/ч (10,4 м/с). (4) уд А �∙ ВАЗ-2111 Va = 1,8 движения ∙ 2,9 ∙ 0,15Sавтомобиля += 18,0 √26 ��а= 0,8при �� ��Пнаезде скорость на пешехода, � �� �� ,В (8) XФ = КM� а �∙� �26 ∙ �а =�3,6 2,91 =�34 (9,4 м/с). (5) (5)(2) VН = �26 ∙ �ПНVдоп JaT∙ 15,32 ��� 1 км/ч �, ��� ∙� �∙ � а ��,� ���,���,���в ∙ �,�� � автомобилем заторможенном состоянии + bмVпройденный КМ = 1,0 где КМ = амПуть, a –Sкоэффициент м � � + 0,0035 . ∙ �,� = 1,04; ам и b(7) уд = �32 ∙ 10,� маневра, � ∙ �,� ��,���,�� � ∙ �� после наезда до остановки, � 1 � 1� = 5,0 ∙ 11,3 = 56,4 км/ч (15,6 м/с). Vдоп = 3,6 ∙ 2,9 ∙ 0,48 �� � �,� а∙ �,��� ��,� � ∙ 0,8 = 8,4; ∙Lt1 = = �� S1S= ″ + а �� SПН = 12,0 +, 3,32 = 15,32, (6) (12) ю 1 � �,� =К (8) XФ�,� M ��� �а �а� = (t1�а+ t2 +поверхности 0,5t � до ,оси задних колес SОпередней ��,�3) где L1 – расстояние от �,�= 3,1, �� ∙ �а S2р = t2р = 0,3 (13) ��,� L1 =�,� 3,32 м;�,�SКюМ″ =–�1,0 длина тормозного сле-ам и bм = ам + bмVa ВАЗ-2111, – коэффициент маневра, + 0,0035 ∙ = 1,04; где КМавтомобиля ��,� ��,� �,� 0,1 + 0,5 ∙ 0,15) ∙ ″ �=∙ �,� +S − S ′==10,2 О = (0,8 да от S наезда до+остановки ТС, 18,0+ −18,8 6,0==29,0 12,0м.м; � ∙S ��,� �� ∙ �,� ю�,���,�ю ю � а = 18,9 м; XФ = S1,04� ∙ tначала ∙ 0,8 = 8,4; до места наезда, (12) 1 = от 1= ∙ �,�� торможения Sю′ – длина тормозного следа �,� �,�� ����,� ��Н �� �П � = �� � � � , (4) S уд В А Sю′ = 6,0 м (см. рис.). �� �� � � ��,� а � П � ∙ �,�� �а∙ ��,� S = t = 0,3 = 3,1, (13) 2р 2р 22,0 м. (4) приводим его Ф = 1,04��,� �,�в = ПодстановкойXпринятых значений уравнение �,�� ∙ �,�� ∙ 15,32 ∙ 2,9 = 34 км/ч (9,4 м/с). (5) VН = �26 ∙ �ПН ∙ �а � �26 к виду � ∙ �,� � ∙ ��,� Определим значениеXправой части неравенства: SУД 18,9 м; ∙ �,�� � − S1 − S2р = 27,3 − 8,4 Ф = 1,04� ���,���,���= (7) Sуд = �32 ∙ 10,� � �,�� ∙ �,�� � . (7) � ∙ �,� ��,���,�� − 3,1 = 15,8 м. Сравним его с XФ = 18,9…22,0 м. Так как 18,9 > 15,8, то XФ > (SУД � ∙ ��,�� ∙ �,�� � ��а ��удаление уравнения (7) определяем ВАЗXФ =условия 1,04� = 22,0 м. автомобиля ), следовательно безопасного объезда пешехода (11) не(8) − S1 − S2рРешением XФ = К �,�� ∙ �,�� , M� �� � 2111 от места наезда в момент обнаружения пешехода на полосе выполняется. Определим значение правой части неравенства: S2р = 27,3 − 8,4 своего движения, которое составляет S К= 27,3 м.SУД − S1 −��,� = 1,04; ам и bм где К М = ам + bмVa – коэффициент маневра, уд М = 1,0 + 0,0035 ∙ �,� технической Вывод: водитель ВАЗ-2111 некакрасполагал Из значений остановочного пути при − 3,1 4.2. = 15,8 м.сравнения Сравним его савтомобиля XФ = 18,9…22,0 м. Так 18,9 торможении > 15,8, то XФ > (SУД �а ��,� S = 29,0 м и удаления автомобиля ВАЗ-2111 от места наезда в момент возможностью предотвратить наезд на пешехода путем маневра t1 = ∙ 0,8 =объезда 8,4; (12) S1 = ∙ безопасного пешехода объезда (11) не − S1 −О S2р), следовательно условия �,� �,� обнаружения пешехода S = 27,3 м следует, что S > S (29,0 > 27,3). уд О уд пешехода при расчетной скорости движения. � ��,� выполняется. S2р = апрепятствия t2р = 0,332 = 3,1, (13) Следовательно, при видимости метра водитель авто�,� �,� 4.2. Вывод: водитель автомобиля ВАЗ-2111 не располагал технической мобиля ВАЗ-2111 не имел технической 159 возможности предотвратить � ∙ ��,�� ∙ �,� наезд на пешехода путем экстренного торможения. = 1,04� = 18,9 м; X Ф возможностью предотвратить наезд �,�� на ∙ �,�� пешехода путем маневра объезда 3.3. Поскольку допустимая скорость движения ТС при видимопешехода при расчетной скорости движения. � ∙ ��,�� ∙ �,�� скорость движения австи дороги 50 метровXпревышает = 1,04� расчетную = 22,0 м. Ф �,�� ∙ �,�� 159 Определим значение правой части неравенства: SУД − S1 − S2р = 27,3 − 8,4 — 149 — − 3,1 = 15,8 м. Сравним его с XФ = 18,9…22,0 м. Так как 18,9 > 15,8, то XФ > (SУД − S1 − S2р), следовательно условия безопасного объезда пешехода (11) не томобиля ВАЗ-2111, то в исследовании наличия у водителя технической возможности избежать наезда на пешехода путем экстренного торможения при этой скорости нет ∙ Jтехнической , (1) Va = 1,8 a ∙ t3 + �26� �необходимости. (1) Va = 1,8 ∙ Ja ∙ t3 + �26�аа�юю, 3.4. Выводы: Va = 1,8 ∙ 2,9 ∙ 0,15 + √26 ∙ 2,9 ∙ 18,0 = 0,8 + 36,8 = 37,6 км/ч (10,4 м/с). Vaпри = 1,8видимости ∙ 2,9 ∙ 0,15 препятствия + √26 ∙ 2,9 ∙ 18,0 = 0,8водитель + 36,8 = 37,6 км/ч (10,4 м/с). 1) 32 метра автомобиля ВАЗ�∙� В 2111 не имел технической предотвратить наезд на Vдоп = 3,6 Jвозможности (2) aT ���∙�В � � 1 � 1 �, Vдоп = 3,6 JaTторможения; �� �а ∙�� � 1 � 1 �, (2) пешехода путем экстренного �а ∙� 2) в исследовании наличия� ∙ у�� водителя технической возможности Vдоп = 3,6 ∙ 2,9 ∙ 0,48 �� � ∙ �� � � 1 � 1� = 5,0 ∙ 11,3 = 56,4 км/ч (15,6 м/с). на пешехода 2,9 ∙ 0,48 �� �,� ∙ �,���путем � 1 �экстренного 1� = 5,0 ∙ 11,3торможения = 56,4 км/ч при (15,6 м/с). Vизбежать доп = 3,6 ∙наезда �,� ∙ �,�� допустимой из условия видимости дороги скорости движения нет � �� SО = (t1 + t2 + 0,5t3) �аа � �а�а , �,� �� ∙ � технической необходимости, так как она выше скорости движеа , SО = (t1 + t2 + 0,5t3) � �,� �� ∙ �а � ния автомобиля ВАЗ-2111. ��,� ��,� SО = (0,8 + 0,1 + 0,5 ∙ 0,15) ∙��,� + ��,�� = 10,2 + 18,8 = 29,0 м. �� ∙ �,�= 10,2 + 18,8 = 29,0 м. �,� = (0,8 + 0,1 + 0,5 ∙ 0,15) ∙ + S О 4-му вопросу По �� ∙ �,� �,� �� �� �� � � � Н П 4.1. Исследуем наличие водителя возможности � � , Sуд = �� �у � �� �� �� � технической Sуд = ��ВВ�АА� � ��Н а П � �� ��П, �� �� � избежать наезда на пешехода путем маневра пешехода при а � объезда П = �26 ∙ �ПН ∙ �а � �26 ∙ 15,32 ∙ 2,9 = 34 км/ч (9,4 м/с). VН скорости расчетной движения. VН = �26 ∙ �ПН ∙ �а � �26 ∙ 15,32 ∙ 2,9 = 34 км/ч (9,4 м/с). для пеОпределяем минимальное расстояние X , необходимое ���,���,��� ∙ �,�� � Sуд = �32 ∙ 10,� ����,���,��� ∙ �,�� Ф� � . � ∙ �,� ��,���,��. рестроения вида полосы с� поперечным смещениSуд =«смена �32 ∙ 10,� � движения» � ∙ �,� ��,���,�� ем на величину YM: ��а� �� � XФ = КM���а �� , � , XФ = КM� �� (8) �� � (4) (4) (5) (5) (7) (7) (8) (8) ��,� маневра, КМ где Кгде Кам=+аbм+Vba –Vaкоэффициент – коэффициент маневра, К ==1,0 1,0++0,0035 0,0035 ∙∙��,� = = 1,04; 1,04; ам и bм М= маневра, КМ =М 1,0 + 0,0035 ∙ �,� = 1,04; ам и bм где КМ = аМм + bммVa –м коэффициент �,� ам и bм – эмпирические коэффициенты, зависящие от дорожного по�а ��,� = ∙ t = ∙ 0,8 = 8,4; (12) S � ��,� 1 1 а крытия, ам = 1,0, bм = 0,0035; – коэффициент сцепления в попереч- (12) S1 = φ�,� y ∙ t1 = �,� ∙ 0,8 = 8,4; �,� �,� ном направлении, φy = 0,8φх = 0,8 = 0,24; φ = 0,3 – коэффициент � ∙ 0,3 ��,� S2р = �аа t2р =��,� 0,3 = х3,1, (13) �,� S2рнаправлении; = t2р = �,� Y 0,3 – = 3,1, сцепления в продольном поперечное смещение (13) �,� �,� М автомобиля, необходимое для безопасного � ∙ ��,�� ∙ �,� объезда пешехода, м: XФ = 1,04�� ∙ ��,�� ∙ �,� = 18,9 м; • при объезде справа XФ = 1,04� �,�� ∙ �,�� = 18,9 м; �,�� ∙ �,�� YМ = (BA − ly) + ∆Б =�(1,68 1,0) + 0,22 = 0,90; (9) ∙ ��,�� − ∙ �,�� XФ = 1,04�� ∙ ��,�� ∙ �,�� = 22,0 м. • при объезде слева XФ = 1,04� �,�� ∙ �,�� = 22,0 м. �,�� ∙ �,�� YМ =правой ∆Б + ly = 0,22 неравенства: + 1,0 = 1,22, SУД − S1 − S2р = (10) Определим значение части 27,3 − 8,4 Определим значение правой части неравенства: SУД − S1 − S2р = 27,3 − 8,4 ly –м.расстояние от справой боковой м. поверхности до точки − 3,1где = 15,8 Сравним его XФ = 18,9…22,0 Так как 18,9ТС > 15,8, то XФ > (SУД − 3,1 удара = 15,8 пешехода м. Сравним его с XФ частью = 18,9…22,0 > 15,8, то XФ > (SУД передней ТС, lyм. = Так 1,0 как м; ∆18,9 – безопасный Б следовательно условия безопасного объезда пешехода (11) не − S1 − S2р), интервал междуусловия автомобилем и пешеходом, − S2р), следовательно безопасного объезда пешехода (11) не − S1 боковой выполняется. выполняется. 4.2. Вывод: водитель автомобиля ВАЗ-2111 не располагал технической 4.2. Вывод: водитель автомобиля не располагал технической — 150 ВАЗ-2111 — возможностью предотвратить наезд на пешехода путем маневра объезда возможностью предотвратить наезд на пешехода путем маневра объезда пешехода при расчетной скорости движения. доп ∙ + a 0,5 (0,8 0,1 � + ∙ +�0,5t + �∙� = 10,2 ,+ 18,8 = 29,0(7) м. SО �∙=0,15) SSудО==�32 10,� 3)∙В�,�.� ∙�(t�1 + t2�,� �� �,� Vдопа�=∙ �,� 3,6 JaT ���,���,�� � 1 ���∙ �1а �, (2) ���∙� � В Vдоп =�3,6 Ja�� T��,� ��� �� 1� � 1 �, (2) �Н��а�∙� � � � П ��,� � ∙ ��Sуд = �� ��а � �� � а ∙� � , км/ч (4) В А + 0,5 ∙ 0,15) ∙ + = 10,2 + 18,8 = 29,0 м. О = (0,8 �� +XФ0,1 � 1 � 1� = 5,0 ∙ 11,3 = 56,4 (15,6 м/с). Vдоп = 3,6 ∙ 2,9 ∙ S0,48 = К , (8) � �� � �� �,� ∙ �,��� M �� � ∙ �� �,� а �� ∙ �,�� П Vдоп = 3,6 ∙ 2,9 ∙ 0,48 �� �� ∙ �� � � 1 �� 1� = 5,0 ∙ 11,3 = 56,4 км/ч (15,6 м/с). ∙ �,�� ��� �∙ � � ��,� П ==5,0 ��� ∙ 2,9∙ �∙ ПН 0,48 1 Н� 1� 11,3 (9,4 = 56,4 км/ч (15,6 м/с). VдопV=Н 3,6 �26 = �26 �=а�� ��,� ∙ 15,32 2,9 м/с). (5) � �� а �� �∙аМ � � ∙∙ 34 ,∙км/ч (4) S+уд∙0,5t �,� А�,�� = �0,005 1,0 +, 0,0035 == 1,04; ам и b м ∆ + = tманевра, 0,005L ∙)ВК = ∙ 4,285 0,22 м, � S = (t М = ам + bмVa – коэффициент О 1Б 2 a3 �,� �� �� ∙ � а � �� ���,� П �� а � а ���,���,�� �а t2 + 0,5t S10,� О = (t� 1+ 3∙ )�,�� �а �� ���а∙�� , . S ∙ (7) �,� где LaV= 4,285 – длина автомобиля ВАЗ-2111. уд =м�32 � ��,� � акм/ч а (t1�26 t2 + 0,5t ���,���,�� , ��,� ∙ � ��,� ∙=�15,32 = 34 (9,4 м/с). (5) ∙8,4; �,� 3) ∙ 2,9 Н = �26 ∙ tS1∙О=�а=� ∙+0,8 (12) 1 = ∙ ПН �,� =�� ∙ �а м. + 0,5 ∙ S0,15) = 10,2 +пешехода 18,8 29,0 SО = (0,8 + 0,1Условие �,� �,� + �,� � безопасного объезда можно представить �� ∙ �,� ��,� ���,� � = 10,2 ∙ �,�� � + 18,8 = 29,0 м. + 0,5 ��,� ∙ 0,15)���,���,�� ∙ ��,� SО = (0,8 + 0,1 ��а� �+ � ��,� а �� Sуд = ��32 ∙�� 10,� (7) =�П� К , ∙ �,��=��,���,�� (8) XНФ∙��0,15) в виде M� (0,8 +=0,1 +�� 0,5 ∙�=�,� + 10,2 + .18,8 = 29,0 м. SО =неравенства S t = 0,3 3,1, (13) � � ∙ �,� 2р 2р �� ∙ �,� �,�, � �� � (4) Sуд = ��В �А �,� �,� � �� ��а X < �� ��S �� �� � � � SН – П – (11) � �1 �� �S�2р, � , (4) Sуд = ���ВФ�А � уд��П�� ��,� � �� Н� а�� �� �� а ,=П1,0 П, �S∙уд ��,� ∙Ф�,� маневра, К + 0,0035 ∙ = 1,04; ам и b(8) где КМ = ам + bмVa – коэффициент = �� � � � = К X М м(4) � M В∙ 2,9 А �,� 1,04� = 18,9 м; где∙S�1ПН –Xрасстояние, проходимое ТС за время реакции водителя, м, �26 ∙�,�� ∙Ф�а= � 15,32 = 34 км/ч (9,4 м/с). (5) VН = �26 �� �� � �� � П �а ∙ �,�� 15,32 ∙ 2,9 = 34 км/ч (9,4 м/с). (12) (5) VН = �26 ∙ �ПН ∙ �а �� �а �26 ∙ ��,� ��,� ���,���,�� � ∙ 0,8 S∙1��=а �∙ �,�� ∙ t1� =∙ 15,32 =1,0 8,4; (12) �26 =a –�26 ∙ 2,9 = 34 км/ч (9,4 м/с). (5) + bVмН∙V10,� коэффициент маневра, К = + 0,0035 ∙ = 1,04; а и b где КМS=уд а=м �32 � ∙ ��ПН . (7) М м м �,� �,� ∙ ��,� ∙ �,�� � ∙ �,�� �,� � ∙ �,� ��,���,�� ���,���,�� � XФ = 1,04� = 22,0 м. � S = �32 ∙ 10,� � � . (7) �,�� ∙ �,�� уд � t1���,���,�� ��,� � t1 – время реакции водителя, = 0,8 S∙ �,�� – расстояние, проходимое � ∙ с; �,� а t2р = ��,� S∙2р == �а� 0,32р= 3,1, (13) Sуд = �32�� � ��,���,�� (7) �� Sа10,� ∙ t1 = �,� 8,4; м, . (12) 1� �,� ��,� ∙ управления, �,�∙ 0,8 = ��,���,�� ТС за время срабатывания рулевого �,� , (8) XФ = Кчасти M� Определим значение правой неравенства: S − S − S = 27,3 − 8,4 � УД 1 2р ��� ��а �� � , (8) XФ �=�а∙К��,� � �� M� ∙��,� �,� а � �� �� S = t = 0,3 =>��,� 3,1, ; то XФ > (SУД (13) (13) = К , (8) = 18,9 м; XФ = 1,04� � = 15,8 м. Сравним его с XФ = 18,9…22,0 Так как 18,9 15,8, 2рXФ м. 2р M �,�� �� �,�� = ам + bмVa – коэффициент маневра, КМ �,� =�,�� 1,0∙ + 0,0035 ∙ = 1,04; ам и bм �,� ��,� − S2р),где следовательно безопасного объезда пешехода не + bмVaусловия –с для коэффициент маневра, КМ =принимаем 1,0 + 0,0035t(11) ∙ = 0,3 = с. 1,04; ам и bм КМt ==ам0,2…0,4 легковых автомобилей, � ∙ �,� ∙ ��,� 2р ��,� � ∙ �,�� �,� = 1,04; а и b �маневра, ∙���,� �а X =��,� К = 1,0 + 0,0035 ∙ где КМ2р= ам + bмSVa =– коэффициент М м 1,04� = 18,9 м; Ф = 22,0 м. t1==1,04� ∙ 0,8�,�� = 8,4; (12) мини- м �,� Ф 1 Подставив вX∙выражение значения, найдем �,�� ∙ �,�� лняется. ∙принятые �,�� �,� �,� �а(8) ��,� = ∙ t = ∙ 0,8 = 8,4; (12) S 1 1 �а ��,� мальное расстояние XФ��,� ,Sнеобходимое перестроения вида «смена (12) �,� �,�для �а t1неравенства: =�не ∙ 0,8 = 8,4; технической 1= �= ∙ ∙��,� ∙ �,� �,�� 4.2. Вывод: водительзначение автомобиля ВАЗ-2111 располагал Определим правой части − S1 − S(13) S t = 0,3 3,1, �,� 2р = 27,3 − 8,4 2р = 2р 1,04� = 22,0 Sна м.УДвеличину полосы движения» поперечным YМ: �,� XФс = �,� �а�,�� ∙ смещением ��,� �,�� 0,3 = 3,1, S = t = (13) 2р 2р � ��,� а ожностью наезд на пешехода путем маневра объезда �,� �,� − 3,1 =предотвратить 15,8 м. Сравним его с X = 18,9…22,0 м. Так как 18,9 > 15,8, то XФ > (SУД Ф • при объезде� ∙справа t2р = 0,3 = 3,1, (13) 2р = ��,�� S ∙ �,� �,� �,� Определим значение правой части неравенства: SУД − S1 − S2р = 27,3 − 8,4 Xскорости Ф = 1,04�движения. = 18,9 м;� хода −при расчетной �,�� условия ∙ �,�� �безопасного ∙ ��,� ∙ �,� объезда пешехода (11) не S1 − S2р), следовательно = 1,04� � ∙ �,� = 18,9 м; Ф � �,�� ∙ ��,�∙ �,�� − 3,1 = 15,8 м. Сравним егоX сX = 18,9…22,0 м.=Так как Ф1,04� X = 18,9 м; 18,9 > 15,8, то XФ > (SУД Ф выполняется. �,�� ∙ �,�� � ∙ ��,�� ∙ �,�� 159 = 22,0 = объезде 1,04� слеваусловия м.� Ф ),Xпри следовательно безопасного объезда пешехода (11) не − S1 − S2р• �,�� ∙ �,�� � ∙ ��,� ∙ �,�� 4.2. Вывод: водитель ВАЗ-2111 не располагал технической XФавтомобиля = 1,04�� ∙ ��,� м. � ∙ �,�� = 22,0 �,�� ∙ �,�� XФ неравенства: = 1,04� =S 22,0 м.= 27,3 − 8,4 выполняется. Определим значение правой части S − − S �,�� УД 1 2р возможностью предотвратить наезд �,�� на ∙пешехода путем маневра объезда Определим значение правой частиВАЗ-2111 неравенства: SУД − S1 − S2р = 27,3 − 8,4 4.2. Вывод: водитель автомобиля не располагал технической 15,8пешехода м. Сравним его с XФзначение = 18,9…22,0 м. Так как 18,9 > 15,8, Sто XФ S>1 (S Определим значение правой части неравенства: Определим правой части неравенства: − УД S2р = 27,3 − 8,4 УД − при расчетной скорости движения. − 3,1 = 15,8 м. Сравним его с XФнаезд = 18,9…22,0 м. Так как 18,9 >маневра 15,8, то X Ф > (SУД предотвратить пешехода путем объезда SУД его −безопасного S1с−XSФ2р==18,9…22,0 27,3на − 8,4 −м.3,1 = 15,8 м. (11) − S2р),возможностью условия объезда пешехода не то X −следовательно 3,1 = 15,8 м. Сравним Так как 18,9 > 15,8, Ф > (SУД следовательно условия безопасного объезда пешехода (11) не − S1 − Sпри 159 2р), расчетной пешехода скорости движения. Сравним его с X = 18,9…22,0 м. Так как 18,9 > 15,8, то няется.− S1 − S2р), следовательно Ф условия безопасного объезда пешехода (11) не выполняется. XФ > (SУДне − Sрасполагал − S2р), 1 4.2. Вывод: водитель автомобиля ВАЗ-2111 технической выполняется. 159 следовательно, условиеавтомобиля безопасного объезда пешехода (11) не вы4.2. Вывод: водитель ВАЗ-2111 не располагал технической жностью предотвратить наезд на автомобиля пешехода ВАЗ-2111 путем маневра объезда технической 4.2. Вывод: водитель не располагал полняется.предотвратить наезд на пешехода путем маневра объезда возможностью ода привозможностью расчетной скорости движения.автомобиля предотвратить наезд на ВАЗ-2111 пешеходанепутем маневра объезда 4.2. Вывод: водитель располагал технипешехода при расчетной скорости движения. ческой предотвратить пешехода привозможностью расчетной скорости движения.наезд на пешехода путем ма159при расчетной скорости движения. невра объезда пешехода 159 159 — 151 — По 5-му вопросу 5.1. В данной дорожной обстановке пешеход Солудан С.П. должен был руководствоваться требованиями пункта 4.1 ПДД РФ: «Пешеходы должны двигаться по тротуарам, пешеходным дорожкам, велопешеходным дорожкам, а при их отсутствии – по обочинам. … При отсутствии тротуаров, пешеходных дорожек, велопешеходных дорожек или обочин, а также в случае невозможности двигаться по ним пешеходы могут двигаться по велосипедной дорожке или идти в один ряд по краю проезжей части (на дорогах с разделительной полосой – по внешнему краю проезжей части). При движении по краю проезжей части пешеходы должны идти навстречу движению транспортных средств. …При переходе дороги и движении по обочинам или краю проезжей части в темное время суток или в условиях недостаточной видимости пешеходам рекомендуется, а вне населенных пунктов пешеходы обязаны иметь при себе предметы со световозвращающими элементами и обеспечивать видимость этих предметов водителями транспортных средств». Поскольку в данной ДТС пешеход двигался попутно с транспортным средством, совершившим наезд, и на удалении от края проезжей части, его действия не соответствовали требованиям п. 4.1 ПДД РФ. 5.2. В данной дорожной обстановке водитель автомобиля ВАЗ2111 Терентьев Т.Т. должен был руководствоваться требованиями пункта 10.1 ПДД РФ: «Водитель должен вести транспортное средство со скоростью, не превышающей установленного ограничения, учитывая при этом интенсивность движения, особенности и состояние транспортного средства и груза, дорожные и метеорологические условия, в частности видимость в направлении движения… При возникновении опасности для движения, которую водитель в состоянии обнаружить, он должен принять возможные меры к снижению скорости вплоть до остановки транспортного средства». Водитель Терентьев Т.Т. двигался со скоростью, не превышающей установленных ограничений в соответствии с условиями видимости дороги в направлении движения, поэтому в его действиях отсутствует противоречие с требованиями первой части п. 10.1 ПДД РФ. — 152 — Водитель Терентьев Т.Т. не имел технической возможности предотвратить наезд на пешехода путем своевременного экстренного торможения, поэтому в его действиях нет противоречий с требованиями второй части п. 10.1 ПДД РФ. ВЫВОДЫ 1. Из расчетного исследования следует, что перед торможением автомобиль ВАЗ-2111 двигался со скоростью около 37,6 км/ч. 2. Допустимая скорость, соответствующая видимости дороги SВ = 50 метров, составляет 56,4 км/ч. Скорость движения автомобиля на месте ДТП – 37,6 км/ч – не превышала допустимую скорость при данной видимости дороги. 3. При видимости препятствия 32 метра водитель автомобиля ВАЗ2111 не имел технической возможности предотвратить наезд на пешехода путем экстренного торможения. В исследовании наличия у водителя технической возможности избежать наезда на пешехода путем экстренного торможения при допустимой из условия видимости дороги скорости движения нет технической необходимости, так как она выше скорости движения автомобиля ВАЗ-2111. 4. Водитель автомобиля ВАЗ-2111 не располагал технической возможностью предотвратить наезд на пешехода путем маневра объезда пешехода при расчетной скорости движения. 5. В данной дорожной обстановке пешеход Солудан С.П. должен был руководствоваться требованиями пункта 4.1 ПДД РФ. Поскольку в данной ДТС пешеход двигался по проезжей части, его действия не соответствовали требованиям п. 4.1 ПДД РФ. В данной дорожной обстановке водитель автомобиля ВАЗ-2111 Терентьев Т.Т. должен был руководствоваться требованиями пункта 10.1 ПДД РФ. Водитель Терентьев Т.Т. не имел технической возможности предотвратить наезд на пешехода путем своевременного экстренного торможения, поэтому в его действиях нет противоречий с требованиями второй части п. 10.1 ПДД РФ. — 153 — 6. РЕКОМЕНДАЦИИ ПО ОФОРМЛЕНИЮ КУРСОВОГО ПРОЕКТА 6.1. Руководство курсовым проектированием Руководство проектом осуществляет кафедра с привлечением высококвалифицированных специалистов предприятий и организаций для реализации курсового проектирования (КП) по заказу производства. Основными функциями руководителя КП являются: –– разработка и выдача студенту задания на КП; –– консультирование по вопросам содержания и последовательности выполнения КП; –– оказание помощи студенту в подборе необходимой литературы; –– систематический контроль за выполнением календарного плана работы. Задание на КП, составленное руководителем и утвержденное заведующим кафедрой, должно быть выдано индивидуально каждому студенту. Форма задания на курсовой проект представлена в прил. Ж. Исходные данные к выполнению курсового проекта представляются в виде постановления следователя о назначении автотехнической экспертизы по конкретному ДТП по форме, представленной в прил. И. Постановление о назначении автотехнической экспертизы с исходными данными утверждается руководителем и является неотъемлемой частью задания на выполнение курсового проекта. На основании постановления следователя о назначении автотехнической экспертизы студент составляет исходные данные по форме, представленной в прил. К. Для контроля за ходом выполнения КП кафедра составляет расписание консультаций руководителей. Контрольно-консультационные встречи должны назначаться не реже одного раза в неделю. График консультаций вывешивается на доске объявлений кафедры и в кабинете курсового проектирования. Для студентов заочной и дистанционной форм обучения график консультаций составляется с учетом графика работы студентов. При проведении консультаций могут использоваться видеоконферен— 154 — ции, общение по электронной почте и другие возможности цифровых технологий. Студенту следует иметь в виду, что научный руководитель не является ни соавтором, ни редактором курсового проекта и поэтому не должен поправлять все имеющиеся в курсовом проекте теоретические, методологические, стилистические и другие ошибки. На различных стадиях подготовки и выполнения курсового проекта задачи научного руководителя изменяются. На первом этапе подготовки руководитель советует, как приступить к рассмотрению темы, корректирует план работы и дает рекомендации по списку литературы. В ходе выполнения проекта научный руководитель выступает как оппонент, указывает студенту на недостатки аргументации, композиции, стиля и т. п., советует, как их лучше устранить. Рекомендации и замечания научного руководителя студент должен воспринимать творчески. Он может учитывать их или отклонять по своему усмотрению, так как ответственность за теоретически и методологически правильную разработку и освещение темы, качество содержания и оформление курсового проекта полностью лежит на нем, а не на научном руководителе. После получения окончательного варианта курсового проекта научный руководитель оценивает КП по четырехбалльной системе. 6.2. Оформление пояснительной записки Курсовой проект состоит из пояснительной записки стандартного печатного текста и графической части в виде масштабной схемы ДТП (формат А3). Чертежи могут быть выполнены с использованием современных компьютерных технологий. Пояснительная записка по форме и содержанию должна соответствовать рекомендациям РФЦСЭ (Российский федеральный центр судебной экспертизы) по составлению экспертного заключения автотехнической экспертизы ДТП. Примеры составления экспертного заключения в соответствии с постановлением следователя приведены в главе 5. — 155 — При выполнении курсового проекта студент выполняет роль эксперта-автотехника в пределах прав, предоставленных ему «Инструкцией по организации производства судебных экспертиз в государственных судебно-экспертных учреждениях системы Министерства юстиции Российской Федерации», и с учетом обязанностей, изложенных в главе 2 данного пособия. Методики проведения расчетов и экспертных исследований наездов ТС на пешеходов приведены в главах 3 и 4 данного пособия. В 5-й главе учебно-методического пособия приведены примеры экспертного исследования ДТП в виде наезда ТС на пешехода, которые могут быть использованы студентами в качестве образца для оформления курсового проекта. При этом рассмотрено всё многообразие вариантов дорожно-транспортных ситуаций: –– выход пешехода на проезжую часть в поперечном направлении по отношению к ТС при неограниченной обзорности с места водителя и видимости в направлении движения; –– выход пешехода на проезжую часть в поперечном направлении из-за неподвижного ТС; –– выход пешехода на проезжую часть в поперечном направлении из-за движущегося во встречном или попутном направлениях ТС; –– движение пешехода в попутном или встречном направлениях с ТС, в том числе в условиях ограниченной видимости. Оформление КП должно соответствовать принятым стандартам. Пояснительная записка к курсовому проекту оформляется компьютерным (машинописным) способом, также допускается рукописный вариант оформления работы. Пояснительная записка курсового проекта, как правило, содержит следующие разделы: –– титульный лист, оформленный в соответствии с прил. Л; –– задание на курсовой проект (выдается кафедрой); –– постановление о проведении автотехнической экспертизы ДТП (выдается кафедрой); –– аннотацию; –– оглавление; –– вводную часть, которая включает: — 156 — 1) исходные данные к автотехническому исследованию (составляются студентом по рекомендованной в прил. К форме на основании постановления о проведении автотехнической экспертизы ДТП); 2) список используемой литературы; 3) список принятых обозначений и коэффициентов; 4) схему ДТП (составляется студентом на основании постановления о проведении автотехнической экспертизы ДТП); –– исследовательскую часть; –– выводы; –– приложения. Общий объем пояснительной записки 15–20 листов формата А4. Печать на компьютере: шрифт Times New Roman, кегль 14, полуторный интервал. Поля: левое – 20 мм, правое – 20 мм, верхнее – 20 мм, нижнее – 20 мм. Графическая часть курсового проекта представляется масштабной схемой ДТП на листе формата А3, выполненной компьютерным построением или вручную. — 157 — ЗАКЛЮЧЕНИЕ Нарушения водителями правил безопасности дорожного движения и эксплуатации транспортных средств следует отнести к сложным для расследования и экспертизы видам правонарушений. При принятии решений по любому ДТП затрагиваются непосредственно законные права и интересы участников происшествия. Число данных нарушений, относящихся к неумышленным преступлениям, неуклонно растет в связи с постоянно возрастающим в РФ количеством транспортных средств, увеличением интенсивности их движения. Практика расследования ДТП показывает, что в населенных пунктах наибольший процент составляют столкновения транспортных средств и наезды на пешеходов, а на магистралях – столкновения и опрокидывание транспортных средств. Безопасность дорожного движения в системе «водитель – автомобиль – дорога – окружающая среда» определяется тремя факторами: соблюдением участниками дорожного движения ПДД, технической исправностью транспортных средств и дорожными условиями. Постоянный рост числа происшествий, в свою очередь, осложняет работу сотрудников ГИБДД, дознавателей и следователей, занятых расследованием ДТП. Требуется оперативный выезд на место происшествия, тщательный его осмотр, полная и объективная фиксация всех данных, относящихся к ДТП. Профессионализм следственных действий, процессуально четкое проведение осмотра места ДТП, сбор необходимых для доказательства материалов позволяет установить виновность конкретного лица. В большинстве случаев состав преступления возможно установить только после производства судебной автотехнической экспертизы. Поэтому проведение автотехнических и дорожно-транспортных экспертиз, способствующих установлению причинно-следственной связи между действиями участников ДТП и наступившими последствиями, занимает важное место в расследовании уголовных дел данного направления. — 158 — Эффективность расследования уголовных дел этой категории находится в прямой зависимости от своевременного проведения автотехнической экспертизы, правильности вопросов, поставленных перед экспертом, полноты и достоверности исследования, применения современных методик экспертных исследований. Положения и рекомендации, практические задачи, изложенные в данном учебном пособии, предназначены для подготовки выпускников вузов к работе, связанной с расследованием и экспертизой дорожно-транспортных происшествий. Приобретение студентами навыков при выполнении конкретных экспертных работ в ходе курсового проектирования по дисциплине «Основы автотехнической экспертизы» дает возможность применить их в последующей практической деятельности. — 159 — Библиографический список 1. Бабков, В.Ф. Дорожные условия и безопасность движения / В.Ф. Бабков. – М. : Транспорт, 1993. – 271 с. 2. Иларионов, В.А. Экспертиза дорожно-транспортных происшествий : учебник для вузов / В.А. Иларионов. – М. : Транспорт, 1989. – 255 с. 3. Клинковштейн, Г.И. Организация дорожного движения : учеб. для вузов / Г.И. Клинковштейн, М.Б. Афанасьев. – 5-е изд., перераб. и доп. – М. : Транспорт, 2001. – 247 с. 4. Суворов, Ю.Б. Судебная дорожно-транспортная экспертиза. Судебно-экспертная оценка действий водителей и других лиц, ответственных за обеспечение безопасности дорожного движения, на участках ДТП : учебное пособие / Ю.Б. Суворов. – М. : Экзамен, 2004. – 208 с. – ISBN 978-5-7858-0117-2. 5. Домке, Э.Р. Расследование и экспертиза дорожно-транспортных происшествий : учебник для студ. высш. учеб. заведений / Э.Р. Домке. – 2-е изд., стер. – М. : Academia, 2012. – 288 с. 6. Россинская, Е.Р. Судебная экспертиза : сборник документов / Е.Р. Россинская, Е.Р. Галяшина. – М. : Проспект, 2010. – 160 с. 7. Боровский, Б.Е. Безопасность движения автомобильного транспорта / Б.Е. Боровский. – Л. : Лениздат,1984. – 304 с. — 160 — Приложение А Классификация автотранспортных средств Категория Полная масса M1 – M2 До 5 т M3 Свыше 5 т N1 До 3,5 т N2 N3 Тип автотранспортного средства Автотранспортные средства, предназначенные для перевозки пассажиров, имеющие не более 8 мест для сидения, кроме места водителя, или созданные на их базе модификации, предназначенные для перевозки мелких грузов (пикапы, универсалы и т. п.), при полной массе, соответствующей полной массе базовой модели легкового автомобиля Те же, имеющие более 8 мест для сидения, кроме места водителя Те же Автотранспортные средства Свыше 3,5 до 12,0 т с двигателем, предназначенные для перевозки грузов Свыше 12 т L – Мотоциклы O – Прицепы и полуприцепы — 161 — Приложение Б Таблица Б.1 Дифференцированные значения времени реакции водителя Характеристика ДТС и других обстоятельств Типичные варианты t2, с І. Сложные ДТС ДТС, предшествовавшая ДТП, Выход пешехода из-за объекта, огра- 0,6 ничивающего обзорность, непосредсвидетельствовала о весьма большой вероятности его воз- ственно вслед за другим пешеходом; начало движения в направлении поникновения: – водитель имел объективную лосы следования ТС пешехода, находившегося в поле зрения водителя; возможность заранее обнаружить признаки вероятного начало движения в направлении возникновения препятствия, полосы следования ТС ребенка, находившегося на дороге в поле зрения с достаточной точностью водителя; определить место, где могвыезд ТС, водитель которого имел ло появиться препятствие, момент возникновения и ха- преимущественное право на движение рактер препятствия, а также необходимые меры по предотвращению ДТП; – от водителя требовалось особое внимание к ДТС. Он должен был постоянно наблюдать за местом вероятного возникновения препятствия и подготовиться к принятию необходимых мер по предотвращению ДТП ДТС, предшествовавшая ДТП, Выход пешехода: 0,8 свидетельствовала о большой – на нерегулируемый пешеходный вероятности его возникнове- переход или на проезжую часть данния: ного направления на перекрестке – водитель имел объективную в месте, где переход разрешен; возможность заранее обнару– на регулируемый пешеходный жить явные признаки вероятно- переход или на проезжую часть данго возникновения препятствия, ного направления на регулируемом но мог не иметь возможности перекрестке на разрешающий сигнал заранее определить с достаточ- светофора (регулировщика). ной точностью место, где могло Выход на проезжую часть: появиться препятствие, момент – пешехода, до этого двигавшегося возникновения и характер пре- в том же направлении в поле зрения пятствия, а также необходимые водителя (с тротуара, обочины, от меры по предотвращению ДТП; разделительной полосы, трамвайного полотна или резервной зоны); — 162 — Продолжение таблицы Б.1 Характеристика ДТС и других обстоятельств – от водителя требовалось повышенное внимание к ДТС, он не должен был отвлекаться от наблюдения за ней Типичные варианты t2, с – пешехода на участке, где переход разрешен (если пешеход до выхода на проезжую часть двигался в ином направлении, стоял или вышел из группы людей). Появление пешехода на проезжей части на участке, где переход разрешен: – из-за неподвижного объекта, ограничивавшего обзорность, или из (изза) находившейся на проезжей части группы людей; – из-за ТС, двигавшегося по крайней полосе движения. Движение пешехода к общественному транспорту или от него на остановках общественного транспорта. Возникновение препятствия (опасности), о котором водитель был предупрежден соответствующим дорожным знаком. Выезд ТС, водитель которого был вынужден сделать это из-за сложившихся обстоятельств. Движение ТС против разрешенного направления. Изменение траектории движения следовавшего впереди ТС в процессе его обгона. Экстренное торможение следовавшего впереди ТС во время изменения траектории заднего для обгона ДТС, предшествовавшая ДТП, Внезапный выход пешехода на проез- 1,0 не содержала явных признаков жую часть на участке, где переход вероятности его возникноне разрешен: вения. Однако в поле зрения – из-за ТС, следовавшего не по крайводителя находились (или ней полосе движения, если пешеход могли появиться с большой до выхода на проезжую часть двигалвероятностью) объекты, кося в ином направлении, стоял или торые могли создать опасную вышел из группы людей; обстановку: – из-за неподвижного объекта, огра– водитель мог не иметь объ- ничивающего обзорность, или из (изективной возможности зара- за) находившейся на проезжей части нее определить место, где группы людей; — 163 — Продолжение таблицы Б.1 Характеристика ДТС и других обстоятельств могло появиться препятствие, момент его возникновения и характер, а также принять необходимые меры по предотвращению ДТП; – от водителя требовалось внимание к ДТС, он не должен был отвлекаться от наблюдения за ней ДТС, предшествовавшая ДТП, не содержала признаков возникновения препятствия, хотя в поле зрения водителя находились объекты, которые могли создать опасную обстановку: – водитель не имел объективной возможности заранее определить место, где могло появиться препятствие, а также принять необходимые меры по предотвращению ДТП; – от водителя не требовалось повышенного внимания к ДТС и постоянного наблюдения за ней ДТС, предшествовавшая ДТП, свидетельствовала о минимальной вероятности его возникновения: – в поле зрения водителя отсутствовали объекты, которые могли стать препятствием; Типичные варианты t2, с – из-за ТС, следовавшего по крайней полосе движения. Появление пешехода на проезжей части на участке, где переход разрешен, из-за ТС, следовавшего не по крайней полосе движения. Выезд ТС, водитель которого не имел преимущественного права на движение. Поворот ТС на перекрестке без подачи сигнала поворота Внезапный выход пешехода 1,2 на проезжую часть: – на участке, где переход не разрешен, из-за ТС, следовавшего не по крайней полосе движения; – с обочины вне населенного пункта при отсутствии пешеходного движения (если пешеход до выхода на проезжую часть двигался в ином направлении или стоял). Движение по проезжей части в направлении полосы ТС пешехода, начавшего переход при запрещающем сигнале светофора (регулировщика). Выезд ТС при запрещающем сигнале светофора (регулировщика). Внезапное появление ТС на проезжей части населенного пункта из-за объекта, ограничивавшего обзорность. Внезапное изменение направления движения встречного или попутного ТС вне перекрестка (когда признаки возможного совершения маневра отсутствовали). Торможение следовавшего впереди ТС без включения стоп-сигнала с замедлением 3–6 м/с2 Внезапное появление пешехода или 1,4 ТС на проезжей части дороги вне населенного пункта (из-за объекта, ограничивавшего обзорность). Торможение следовавшего впереди ТС без включения стоп-сигнала с замедлением до 3 м/с2. — 164 — Окончание таблицы Б.1 Характеристика ДТС Типичные варианты и других обстоятельств – водитель не имел объекНеровности и разрушения проезжей тивной возможности заранее части, находившиеся на проезжей части объекты, не предусмотренные определить место, где могв вышеприведенных типичных варило появиться препятствие, момент его появления и антах (люди, животные, неподвижные объекты, предметы) характер, а также принять необходимые меры по предотвращению ДТП; – водитель мог отвлечься для того, чтобы посмотреть на контрольные приборы, пассажиров или окружающую местность в целях ориентировки ІІ. Свободные ДТС ДТС, в которых не возникает Внезапный отказ фар ТС. препятствий для движения ТС Переключение сигнала светофора и сам водитель не создает по- на красный (после желтого) мех (его автомобиль не явля- Внезапное открытие капота или ется препятствием) для других крышки багажника впереди идущего участников движения ТС. Внезапное ослепление водителя светом фар встречного ТС Внезапный отказ или неэффективность органа управления ТС, проявление других неисправностей, угрожающих безопасности движения. Физическое вмешательство пассажира в процесс управления ТС ІІІ. Оценка выбора скорости и дистанции Оценка водителем дорожных Выбор водителем скорости ТС по усусловий и обстановки ловиям видимости элементов дороги в направлении движения Выбор водителем дистанции при следовании за ТС-лидером t2, с 0,6 0,8 1,2 0,3* Примечание. * Для расчета максимально допустимой скорости и минимально допустимой дистанции. — 165 — Таблица Б.2 Время запаздывания срабатывания тормозной системы Категория АТС t 2, с Одиночные АТС М1 0,1 М2 0,1 М3 0,2 N1 0,2 N2 0,2 N3 0,2 Автопоезда М1 – М2 – М3 0,2 N1 0,2 N2 0,2 N3 0,2 — 166 — 0,6 0,35 0,1 0,2 0,2 0,2 0,2 0,1 0,1 0,2 0,2 0,2 0,2 M2 M3 N1 N2 N3 M1 M2 M3 N1 N2 N3 0,7 0,1 M1 0,6 0,6 0,35 0,6 0,6 0,6 0,35 0,6 0,8 0,35 t2, с Категория Одиночные Автопоезда — 167 — 0,6 0,6 0,35 0,6 0,6 0,35 0,6 0,6 0,35 0,6 0,5 0,3 0,6 0,55 0,55 0,35 0,55 0,5 0,3 0,5 0,5 0,3 0,5 0,45 0,25 0,5 0,45 0,45 0,3 0,45 0,4 0,2 0,4 0,4 0,25 0,4 0,35 0,2 0,4 0,3 0,3 0,2 0,3 0,3 0,15 0,3 0,3 0,2 0,3 0,25 0,15 0,3 0,2 0,2 0,15 0,2 0,2 0,1 0,2 0,2 0,1 0,2 0,2 0,1 0,2 в снаряженном состоянии 0,1 0,7 0,6 0,8 0,6 0,55 0,3 0,6 0,5 0,5 0,5 0,25 0,4 0,4 0,2 0,4 0,6 0,6 0,6 0,6 0,6 0,6 0,6 0,6 0,1 0,1 0,6 0,6 0,6 0,6 0,3 0,2 0,3 0,3 0,15 0,1 0,1 0,1 0,2 172 0,6 0,5 0,5 0,3 0,1 0,1 0,35 0,25 0,15 0,35 0,25 0,15 0,25 0,15 0,55 0,45 0,35 0,25 0,6 0,6 0,6 0,6 0,6 0,3 0,6 0,5 0,6 0,6 0,6 0,6 0,2 0,4 0,6 0,6 0,5 0,5 0,3 0,55 0,45 0,55 0,45 0,25 0,6 0,6 0,6 0,6 0,6 0,6 0,6 0,6 0,6 0,6 0,2 0,2 0,4 0,2 0,4 0,4 0,5 0,5 0,4 0,4 0,1 0,1 0,1 0,1 0,05 0,1 0,25 0,15 0,25 0,15 0,2 0,1 0,25 0,15 0,15 0,05 0,25 0,15 0,25 0,15 0,25 0,15 0,3 0,3 0,1 0,2 0,45 0,35 0,25 0,5 0,3 0,15 0,35 0,35 0,35 0,35 0,25 0,6 0,6 0,15 0,05 0,35 0,35 0,35 0,25 0,55 0,45 0,35 0,25 0,15 0,25 0,55 0,45 0,35 0,25 0,15 0,3 0,7 0,05 0,35 Таблица Б.3 Таблица Б3 с полной массой 0,15 0,05 0,35 0,35 0,35 0,2 0,2 0,1 0,2 0,55 0,45 0,35 0,25 0,15 0,05 0,35 0,35 0,35 0,1 0,1 0,05 0,35 0,35 0,1 0,1 0,05 0,35 0,35 0,35 0,25 0,1 0,1 0,05 0,35 с 50-процентной нагрузкой t3 при коэффициенте сцепления шин с дорогой, с Время замедления Времянарастания нарастания замедления Приложение В Приложение В 5,9/5,7 5,9 5,6 5,9/5,7 6,1 6,1 5,5 5,0 4,7 4,9 5,1 N1 N22 N3 M1 M2 M3 N1 N2 N3 5,9 5,1 4,9 4,7 5,0 5,5 5,9 5,6 5,3/5,0 6,0 5,3/5,0 5,9 0,6 4,9 4,9 4,7 4,9 4,9 4,9 4,9 0,5 3,9 3,9 0,4 2,9 2,9 0,3 в снаряженном состоянии M2 6,7 /6,4 0,7 M32 M1 1 Категория 2,0 2,0 0,2 1,0 1,0 0,1 5,3 5,9 0,6 4,9 4,9 0,5 4,8 4,5 4,5 4,4 4,8 5,0 5,7 5,0 4,5 4,5 4,4 4,8 5,0 5,7 5,0 173 5,0/4,9 5,0/4,9 4,8 4,5 4,5 4,4 4,8 4,9 4,9 4,9 4,9 4,8 3,6 3,9 0,4 2,9 2,9 0,3 2,0 2,0 0,2 с 50-процентной нагрузкой 4,9/4,8 4,9/4,8 4,9/4,8 5,3 6,5/6,0 0,7 Коэффициент сцепления шин с дорогой 1,0 1,0 0,1 0,5 4,0 4,0 4,0 4,5 4,5 5,2 4,0 4,0 4,0 4,5 4,5 4,0 4,0 4,0 4,5 4,5 5,2 4,0 4,0 4,0 4,5 4,5 4,0 4,0 4,0 4,5 4,5 4,9 4,0 4,0 4,0 4,5 4,5 3,9 3,9 0,4 2,0 2,0 0,2 1,0 1,0 0,1 Таблица В2 2,9 2,9 0,3 с полной массой 0,6 6,3/5,5 5,9/5,5 4,9 0,7 Значения установившегося замедления автотранспортных средств, производство которых начато до 01.01.1981 Таблица В.1 Таблица В1 Значения установившегося замедления автотранспортных средств, производство которых начато до 01.01.1981 Одиночные Автопоезда — 168 — Значения установившегося замедления автотранспортных средств, производство которых начато после 01.01.1981 Таблица В.2 5,7 5,5 4,7 5,5 5,5 M2 M3 N1 N2 N3 5,9 6,2 6,1 5,9 N2 N3 5,7 N1 M1 5,7 5,7 M3 5,5 5,5 4,7 5,5 5,7 5,9 5,7 5,7 5,9 6,8 M2 5,9 4,9 4,9 4,7 4,9 4,9 4,9 4,9 0,5 3,9 3,9 0,4 2,9 2,9 0,3 2,0 2,0 0,2 в снаряженном состоянии 0,6 6,8 0,7 M1 Категория 1,0 1,0 0,1 4,5 4,5 4,4 4,8 5,0 5,7 5,4 5,4 5,1 5,6 6,1 6,6 0,7 5,0 5,0 4,4 5,3 5,1 5,7 5,4 5,4 5,1 5,6 5,9 5,9 0,6 3,6 3,9 0,4 174 4,9 4,9 4,4 4,8 4,9 4,9 4,9 0,5 2,9 2,9 0,3 2,0 2,0 0,2 с 50-процентной нагрузкой 1,0 1,0 0,1 Коэффициент сцепления шин с дорогой 4,5 4,5 4,0 5,0 4,5 5,2 4,5 4,5 4,5 5,4 5,4 6,3 0,7 4,5 4,5 4,0 5,0 4,5 5,2 4,5 4,5 4,5 5,4 5,4 5,9 0,6 4,5 4,5 4,0 4,9 4,5 4,9 4,5 4,5 4,5 4,9 4,9 4,9 0,5 3,9 3,9 0,4 2,9 2,9 0,3 2,0 2,0 0,2 с полной массой 1,0 1,0 0,1 Значения установившегося замедления автотранспортных средств, производство которых начато после 01.01.1981 Одиночные Автопоезда — 169 — Таблица В.3 Экспериментальные значения параметров торможения автомобилей Марка автомобилей Параметр в снаряженном состоянии при полной массе сухое мокрое сухое мокрое покрытие покрытие покрытие покрытие Мерседес-Бенц серии 200 JА, м/с2 7,4 6,7 6,7 6,2 t3, с 0,40 0,50 0,45 0,55 Мерседес-Бенц серии 190 JА, м/с2 8,4 7,7 7,9 7,3 t3, с 0,40 0,40 0,45 0,45 JА, м/с2 8,8 6,7 8,3 6,5 t3, с 0,50 0,45 0,5 0,45 JА, м/с2 8,7 6,5 8,2 6,4 t3, с 0,45 0,4 0,5 0,45 BMW серии 700 Тойота Королла — 170 — Приложение Г Таблица Г1 Коэффициенты сцепления на капитальных покрытиях Состояние покрытия Тип покрытия Асфальтобетон Цементобетон эксплуатируемый Асфальтобетон свежеуложенный Асфальтобетон эксплуатируемый гладкий Асфальтобетон эксплуатируемый шероховатый Цементобетон эксплуатируемый гладкий Цементобетон эксплуатируемый шероховатый по степени влажности по степени загрязненности Сухое Значение коэффициента φX 0,70–0,80 Не полностью покрыто снегом – 0,25–0,35 Сухое – 0,60–0,70 Влажное – 0,25–0,35 Мокрое – 0,20–0,30 Чистое 0,45–0,55 Грязное 0,30–0,35 Влажное Мокрое Влажное Мокрое Влажное Мокрое Влажное Мокрое — 171 — Чистое 0,35–0,45 Грязное 0,20–0,25 Чистое 0,50–0,70 Грязное 0,30–0,55 Чистое 0,45–0,60 Грязное 0,25–0,50 Чистое 0,30–0,45 Грязное 0,25–0,35 Чистое 0,25–0,40 Грязное 0,25–0,35 Чистое 0,50–0,70 Грязное 0,35–0,50 Чистое 0,40–0,65 Грязное 0,35–0,50 Таблица Г.2 Коэффициенты сцепления на переходных и низших покрытиях Тип покрытия Гравийное, щебеночное, гравийно-щебеночно-грунтовое Грунтовое, утрамбованное Грунтовое, взрыхленное Травянистая грунтовая обочина, полностью покрытая травой Травянистая грунтовая обочина (трава растет отдельными пучками) Состояние покрытия Значение коэффициента φX Сухое 0,65–0,75 Мокрое 0,35–0,50 Сухое 0,65–0,75 Мокрое 0,35–0,50 Сухое 0,65–0,75 Мокрое 0,35–0,50 Сухое 0,50–0,75 Мокрое 0,35–0,40 Сухое 0,40–0,75 Мокрое 0,30–0,40 Полностью покрытое снегом (рыхлым, не уплотненным) 0,20–0,25 Покрытое раскатанным снегом (уплотненным) без ледяной корки 0,20–0,30 То же, с ледяной коркой 0,15–0,25 Обледенелое 0,10–0,20 Покрытое раскатанным снегом (уплотненным), обработанное минеральными материалами 0,30–0,40 Обледенелое, обработанное минеральными материалами 0,25–0,35 — 172 — — 173 — 12,7 Таблица Д.1 7 6 5 4 3 2 Школьники от 8 до 10 лет Школьники от 10 до 12 лет Школьники от 12 до 15 лет Молодые от 15 до 20 лет Молодые от 20 до 30 лет Среднего возраста от 30 до 40 лет 24 14 26 46 41 24 Ж 80 М Ж М Ж М 90 М 54 Ж 39 М Ж 36 31 М Ж 3,0–4,4 3,0–4,5 2,9–4,1 3,5–4,6 3,4–4,6 3,2–4,6 3,2–4,5 3,5–4,6 3,1–3,7 3,2–4,2 2,8–3,6 3,1–3,7 3,8 3,9 3,7 4,2 4,1 3,9 3,6 3,8 3,3 3,7 3,0 3,4 66 33 32 82 91 41 71 94 49 60 71 51 4,7–5,8 4,8–5,8 4,6–5,6 4,8–6,2 4,7–5,9 4,8–6,2 4,5–5,5 5,0–5,8 4,2–5,4 4,4–5,5 4,0–5,2 4,3–5,4 5,2 5,4 5,2 5,7 5,3 5,7 5,0 5,2 4,8 4,9 4,3 4,6 53 38 20 57 72 51 78 76 48 43 54 56 5,9–7,2 6,0–7,8 5,7–6,9 6,3–7,8 6,0–7,4 6,3–7,8 5,6–6,8 5,9–7,1 5,4–6,6 5,7–6,9 5,2–6,4 5,6–6,7 6,5 6,8 6,3 6,9 6,6 6,8 6,1 6,5 5,8 6,2 5,5 6,0 45 12 11 25 47 29 75 118 46 46 53 62 8,1–11,6 8,6–13,0 8,1–12,6 8,8–18,0 8,5–12,8 8,2–12,0 7,7–11,2 7,8–11,7 7,4–10,7 7,6–11,1 7,2–10,3 7,4–10,7 9,8 10,3 10,0 11,0 10,6 10,6 9,5 10,0 8,9 9,3 8,4 8,9 11,5–13,5 12,3–15,2 12,7–15,4 11,4–13,4 19 14 9 27 17 32 69 12,0–17,0 14,4–18,0 13,0–16,6 14,4–18,0 13,8–17,0 13,1–18,0 12,7–15,5 119 13,2–16,0 47 45 67 51 179 14,1 16,3 14,9 16,7 15,3 15,5 14,1 14,6 13,4 13,8 12,5 Медленный шаг Спокойный шаг Быстрый шаг Спокойный бег Быстрый бег Возрастная КолКолКолКолКол№ категория Пол во Предел Средняя во Предел Средняя во Предел Средняя во Предел Средняя во Предел Средняя п/п пешеходов наб- скорости скорость наб- скорости скорость наб- скорости скорость наб- скорости скорость наб- скорости скорость ний ний ний ний ний 1 Школьники М 29 2,7–3,9 3,1 27 4,0–5,2 4,4 23 5,4–6,5 5,9 28 7,2–10,4 8,5 25 11,2–13,0 12,2 от 7 до Ж 28 2,6–3,5 2,9 29 3,7–5,0 4,2 29 5,0–6,2 5,3 31 7,0–10,0 8,0 34 10,8–12,4 11,2 8 лет Скорость движения пешеходов, км/ч (по данным Ленинградской НИЛСЭ, 1966 г.) Скорость движения пешеходов, км/ч (по данным Ленинградской НИЛСЭ, 1966 г.) Приложение Д Таблица Д1 Приложение Д — 174 — 12 11 10 9 8 № п/п 180 Медленный шаг Спокойный шаг Быстрый шаг Спокойный бег Быстрый бег Возрастная КолКолКолКолКолкатегория Пол во Предел Средняя во Предел Средняя во Предел Средняя во Предел Средняя во Предел Средняя пешеходов наб- скорости скорость наб- скорости скорость наб- скорости скорость наб- скорости скорость наб- скорости скорость ний ний ний ний ний М 33 2,9–4,3 3,8 35 4,6–5,8 5,3 55 6,0–7,2 6,6 25 7,6–11,1 9,6 25 11,3–17,0 14,3 Среднего возраста от Ж 24 2,8–4,1 3,6 42 4,4–5,4 4,9 74 5,5–7,2 6,1 41 7,6–10,6 8,9 35 10,8–16,0 12,7 40 до 50 лет Пожилые от М 57 2,6–4,0 3,4 34 4,2–5,3 4,8 46 5,4–6,8 6,0 15 7,0–10,0 8,6 23 10,1–15,8 12,5 50 до 60 лет Ж 40 2,5–3,9 3,3 43 4,2–5,0 4,5 50 5,2–6,5 5,6 24 6,9–9,0 7,9 17 10,0–14,0 11,2 Пожилые от М 21 2,4–3,4 3,0 31 3,5–4,4 3,9 33 4,5–6,0 5,1 8 6,2–7,6 7,0 4 9,0–12,0 10,5 60 до 70 лет Ж 37 2,4–3,3 2,9 46 3,5–4,4 3,8 42 4,5–5,6 4,9 17 6,2–7,5 6,8 7 8,5–11,5 9,5 Старики М 8 2,0–2,8 2,5 14 2,9–3,5 3,2 19 3,6–5,0 4,2 20 5,1–6,5 5,6 16 7,2–10,6 8,7 старше Ж 27 1,8–2,8 2,4 45 2,9–3,5 3,2 71 3,6–4,8 4,1 26 4,9–6,2 5,5 25 6,4–9,0 7,3 70 лет Пешеходы с протезом М 4 2,2–2,5 2,3 19 2,8–3,9 3,4 10 4,0–5,3 4,5 4 5,5–6,7 6,0 – – – ноги Окончание табл. Д.1 Таблица Д.2 Скорость движения детей Шагом Возраст Предел (лет) скорости, км/ч (м/с) Бегом Средняя скорость, км/ч (м/с) Предел скорости, км/ч (м/с) Средняя скорость, км/ч (м/с) 1,5 – 1,84 (0,51) – 3,46 (0,96) 2–3 2,5–3,2 (0,69–0,89) 2,8 (0,78) – 5,8 (1,61) 3–4 3,2–3,5 (0,89–0,97) 3,4 (0,94) 6,5–10 (1,81–2,78) 8,2 (2,28) 4–5 3,6–3,9 (1,00–1,08) 3,8 (1,06) 8,9–11,5 (2,47–3,19) 10,4 (2,89) 5–6 4,0–4,7 (1,11–1,31) 4,3 (1,19) 9,9–13,7 (2,50–3,81) 11,7 (3,25) 6–7 4,3–5,7 (1,19–1,58) 4,9 (1,36) 9,3–15,6 (2,58–4,33) 12,8 (3,56) — 175 — — 176 — ЗАЗ-968А ЗАЗ-968М ВАЗ-2102 ВАЗ-2103 ВАЗ-2105 ВАЗ-2102 ВАЗ-2103 ВАЗ-2105 ВАЗ-2104 ВАЗ-2106 ВАЗ-21061 ВАЗ-1063 ВАЗ-2107 ВАЗ-2108 ВАЗ-2109 ВАЗ-1099 ВАЗ-2110 ВАЗ-2111 ВАЗ-2112 ВАЗ-2121 ВАЗ-1111 Модель ТС 2,16 2,16 2,42 2,42 2,42 2,42 2,42 2,42 2,42 2,42 2,42 2,42 2,42 2,46 2,46 2,46 2,492 2,492 2,492 2,20 2,18 L, м 0,68 0,72 0,60 0,63 0,65 0,60 0,63 0,65 0,65 0,65 0,65 0,65 0,65 0,78 0,78 0,78 0,82 0,82 0,82 0,69 0,54 с, м hg без a без hg а нагр., м нагр., м с нагр., м с нагр., м 0,556 1,285 0,564 1,285 0,556 1,285 0,564 1,258 0,562 1,160 0,633 1,350 0,560 1,050 0,580 1,260 0,550 1,110 0,560 1,370 0,562 1,160 0,633 1,350 0,560 1,050 0,580 1,260 0,550 1,110 0,560 1,370 0,560 1,050 0,580 1,260 0,560 1,050 0,580 1,260 0,560 1,050 0,580 1,260 0,560 1,050 0,580 1,260 0,560 1,050 0,580 1,260 0,560 1,050 0,580 1,260 0,560 1,050 0,580 1,260 0,560 – – – 0,560 – – – – – – – – – – – 0,700 0,900 0,750 1,130 – – – – 1,200 l,200 1,320 1,320 1,320 1,320 1,320 1,320 1,320 1,320 1,320 1,320 1,320 1,360 1,360 1,370 1,370 1,370 1,370 1,400 1,200 К, м 1,57 1,57 1,61 1,62 1,62 1,61 1,62 1,62 1,62 1,61 1,61 1,61 1,62 1,62 1,62 – 1,68 1,68 1,68 1,68 1,42 Ва, м 3,73 3,73 4,06 4,12 4,13 4,06 4,12 4,13 4,12 4,17 4,17 4,17 4,13 4,00 4,00 4,205 4,265 4,285 4,170 3,72 3,20 La, м 1,70 1,70 1,80 1,80 1,80 1,80 1,80 1,80 1,80 1,80 1,80 1,80 1,80 1,80 1,80 – – – – 1,80 – aх, м 0,40 0,40 0,50 0,50 0,50 0,50 0,50 0,50 0,50 0,50 0,50 0,50 0,50 0,50 0,50 – – – – 0,50 – aу, м 840 840 1010 1030 995 1010 1030 995 1020 1045 1045 1045 1030 900 915 950 1010 1030 1010 1150 635 m0, кг 1160 1160 1440 1430 1395 1440 1430 1395 1395 1445 1445 1445 1430 1325 1340 – 1485 1530 1485 1550 975 ma, кг 195 Шифр ТС 2 2 2 1 1 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Краткие технические транспортных средств: Краткие техническиехарактеристики характеристики транспортных средств: LL – –база ТС, м; с – передний свес, м; h – высота центра тяжести, м; а – расстояние оттяжести центрадо тяжести до оси, передпередней м; база ТС, м; с – передний свес, м; hg – gвысота центра тяжести, м; а – расстояние от центра ней м; К м; В – ширина ТС, м; L – длина ТС, м; a – удаление места водителя от передней части – ширина, м; L – длина ТС, м; a – удаление места водителя от передней части ТС, м; a – удаление К –оси, колея, м;–Вколея, а a у а aх х места от левой части ТС, м; боковой m0 – масса ТС вТС, снаряженном состоянии, кг; ma – масса ТС с полной ТС, м; aводителя – удаление местабоковой водителя от левой части м; m0 – масса ТС в снаряженном состоянии, кг; у кг. с полной нагрузкой, кг. maнагрузкой, – масса ТС Таблица Е Приложение EE Приложение — 177 — L, м 2,40 2,40 2,40 2,40 2,40 2,40 2,58 2,58 2,40 2,40 2,40 2,40 2,70 2,80 2,80 2,80 2,80 1,8 1,80 2,38 2,30 2,63 3,70 3,60 3,60 4,19 4,19 Модель ТС Москвич-2138 Москвич-2136 Москвич-2140 Москвич-2137 Москвич-412 Москвич-2734 Москвич-2141 Москвич-21412 ИЖ-2122 ИЖ-21251 ИЖ-2715 ИЖ-27151 ГАЗ-21 ГАЗ-24 ГАЗ-24-02 ГАЗ-3102 ГАЗ-3110 ЛуАЗ-969А ЛуАЗ-969М УАЗ-469 УАЗ-452В РАФ-2203 КАВЗ-685 ПАЗ-672 ПАЗ-3201 ЛАЗ-695 ЛАЗ-697 0,74 0,74 0,74 0,74 0,67 0,74 – – 0,67 0,67 0,67 0,67 0,84 0,76 0,76 0,96 – 0,85 0,85 0,68 0,98 1,20 0,86 – – – 2,07 с, м hg без a без hg а нагр., м нагр., м с нагр., м с нагр., м 0,570 l,000 0,600 1,300 0,601 1,100 0,617 1,300 0,570 1,000 0,600 1,300 0,601 1,100 0,617 1,300 0,562 1,000 0,596 1,300 0,600 1,120 0,620 1,340 – – – – – – – – 0,601 1,190 0,617 1,340 0,601 1,190 0,617 1,340 0,629 1,155 0,650 1,450 0,560 1,674 0,600 1,450 0,615 1,310 0,714 1,400 0,586 1,350 0,620 1,480 0,600 1,490 0,700 1,540 0,600 1,490 0,700 1,540 – – 1,444 1,80 0,730 0,700 0,770 0,890 0,730 0,660 0,770 0,890 0,375 1,086 0,769 1,390 0,822 1,00 0,900 1,180 0,750 1,20 0,732 1,310 0,930 2,570 1,170 2,680 1,000 1,640 – 2,470 1,100 1,890 1,200 2,270 0,630 2,860 0,830 – 0,650 2,810 0,800 2,790 1,270 1,270 1,270 1,270 1,240 1,270 1,440 1,440 1,240 1,420 1,240 1,240 1,420 1,420 1,420 1,420 4,87 1,320 1,320 1,450 1,440 1,420 1,590 1,630 1,690 1,850 1,850 К, м 1,55 1,55 1,55 1,55 1,55 1,55 1,69 1,69 1,55 1,60 1,60 1,60 1,80 1,82 1,82 1,82 – 1,64 1,64 1,80 1,94 2,04 – 2,44 2,39 2,50 2,50 Ва, м 4,25 4,21 4,25 2,00 4,12 2,00 4,35 4,35 4,12 4,10 4,10 4,10 4,81 4,76 4,74 4,96 – 3,37 3,37 4,03 4,36 4,98 6,60 7,15 2,15 9,19 9,19 La, м 2,00 – 2,00 2,00 2,00 2,00 – – 2,00 2,00 2,00 2,00 2,10 2,20 2,20 2,20 2,20 1,65 1,65 1,90 1,00 1,20 2,00 1,10 1,10 1,10 l,20 aх, м 0,50 0,50 0,50 0,50 0,50 0,50 – – 0,50 0,50 0,50 0,50 0,50 0,50 0,50 0,50 – 0,50 0,50 0,50 0,50 0,45 0,90 0,50 0,50 0,50 0,50 aу, м 1080 1120 1080 1120 1045 1085 1070 1080 1100,0 1100 1100 1050 1450 1420 1550 1470 – 950 960 1650 1870 1671 4080 4535 4860 3850 7300 m0, кг 1480 1520 8480 1520 1445 1590 1470 1480 1450 1450 1590 1590 1875 1820 2040 1870 – 1350 1360 2450 2690 2630 6545 7825 7155 11420 10620 ma, кг 195 Шифр ТС 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 3 2 2 4 4 5 5 Приложение E Таблица ЕE Продолжение приложения — 178 — L, м 5,55 4,37 4,37 5,15 11,60 2,30 2,30 2,30 2,30 3,70 3,30 3,30 3,70 3,77 3,30 3,30 3,70 3,70 3,80 3,30 4,60 5,11 4,60 4,79 3,80 3,30 3,30 4,5 Модель ТС ЛАЗ-699 ЛАЗ-4202 ЛАЗ-42021 ЛиАЗ-677 Ikarus-280 УАЗ-451М УАЗ-451ДМ УАЗ-452 УАЗ-452Д ГАЗ-52-03 ГАЗ-52-04 ГАЗ-52-06 ГАЗ-53А ГАЗ-3307 ГАЗ-66 САЗ-3504 САЗ-3502 ГАЗ-53П ЗИЛ-130 ЗИЛ-130В1 ЗИЛ-131В ЗИЛ-133 ЗИЛ-131 ЗИЛ-157 ЗИЛ-ММЗ-554 ЗИЛ-ММЗ-555 ЗИЛ-ММЗ-4502 ЗИЛ-4331 2,07 2,40 2,40 2,25 2,46 0,98 – – 0,98 0,87 0,87 0,87 0,87 – – 0,87 0,87 0,67 1,08 1,07 1,07 1,07 1,07 1,33 1,08 1,08 1,08 1,15 с, м hg без a без hg а нагр., м нагр., м с нагр., м с нагр., м 0,650 3,530 0,800 3,500 0,550 3,120 0,700 3,030 – – – – 0,650 2,520 0,850 3,050 1,150 2,940 1,350 3,380 0,715 1,070 0,880 1,310 0,710 1,070 0,870 1,320 0,800 0,980 0,900 1,210 0,705 1,6 0,830 1,255 0,800 1,970 1,060 2,670 0,690 1,700 1,040 2,300 0,700 1,550 1,050 2,380 0,820 2,040 1,140 2,800 – – – – 0,763 1,180 1,150 1,680 0,750 1,740 1,050 2,350 0,900 2,260 1,150 2,760 0,900 2,190 1,150 2,780 0,885 1,920 1,200 2,640 0,800 1,490 1,200 2,520 0,800 1,940 1,200 2,760 0,800 2,680 1,200 3,200 0,758 2,190 1,160 2,890 0,970 2,270 1,390 3,150 0,950 1,710 1,240 2,720 0,940 1,720 1,200 2,290 0,950 1,511 1,260 2,380 0,950 1,510 1,260 2,380 1,850 1,880 1,880 – 1,830 1,440 1,440 1,440 – – 1,690 1,690 1,690 1,690 1,750 1,690 1,690 1,690 1,790 1,790 1,820 1,850 1,820 1,750 1,790 1,790 1,790 1,850 К, м 2,50 – 2,50 2,50 2,50 – 2,04 1,94 2,04 2,38 2,20 2,21 2,38 2,38 2,32 2,18 2,47 2,48 2,50 2,36 2,42 2,50 2,50 2,32 2,50 2,42 2,50 2,50 Ва, м 10,54 9,70 10,44 10,45 16,5 – 4,46 4,36 4,46 6,40 5,71 – 6,40 6,55 5,81 5,25 5,81 6,44 6,68 – – 9,00 6,90 6,92 6,35 5,48 5,51 7,61 La, м 2,05 2,05 2,40 2,40 2,20 2,40 2,20 2,60 2,40 2,40 2,40 2,40 – 1,05 0,95 1,00 – 1,00 1,00 1,00 1,00 – 2,05 2,05 – – 1,10 aх, м 0,50 0,50 0,60 0,50 – 0,50 0,50 0,50 0,50 0,60 0,60 0,60 0,60 – 0,50 0,60 0,60 0,60 0,60 0,60 0,80 0,70 0,80 0,70 0,60 0,60 0,60 0,60 aу, м 8555 8600 9000 8380 12540 1540 1510 1720 1670 2815 2520 2435 3250 3200 3470 2900 4030 3700 4300 3860 6470 6875 6460 5540 5125 4570 4800 5300 m0, кг 12640 13400 13630 14050 22500 2700 2660 2670 2620 5465 5170 – 7400 – 5800 5300 7380 7400 10525 – – 15175 11685 8690 10850 10045 10825 12000 ma, кг 195 Шифр ТС 5 5 5 5 5 6 6 6 6 7 7 10 7 7 7 7 7 7 8 8 11 8 8 8 8 8 8 8 Приложение E Таблица ЕE Продолжение приложения — 179 — 6,02 4,93 4,93 4,93 4,93 4,51 5,01 4,16 4,16 3,40 3,95 5,00 3,40 3,95 5,31 6,45 6,00 6,00 5,48 2,90 4,93 4,93 4,16 4,16 3,40 ЗИЛ-133ГЯ УРАЛ-375Д УРАЛ-375Н УРАЛ-4320 УРАЛ-377 KAMAЗ-5320 KAMAЗ-53212 KAMAЗ-5511 KAMAЗ-55102 МАЗ-503 МАЗ-5335 МАЗ-53352 МАЗ-5549 MAЗ-500 МАЗ-516 КРАЗ-257 КРАЗ-255 КРАЗ-260 КРАЗ-256 КАЗ-608В УРАЛ-375СН УРАЛ-375С-К1 КАМАЗ-5410 KAMAЗ-5412 MAЗ-504 1,06 1,25 1,25 1,25 1,28 1,28 1,28 1,28 1,28 1,30 1,30 1,30 1,30 1,30 1,30 1,00 1,05 1,38 1,01 1,44 1,25 1,25 1,28 1,28 – с, м hg без a без hg а нагр., м нагр., м с нагр., м с нагр., м 0,800 2,450 1,200 3,240 1,270 2,270 1,500 3,000 1,300 2,290 1,500 3,040 1,300 2,110 1,500 2,850 1,415 2,260 1,810 3,100 0,900 2,040 1,300 2,750 0,900 2,440 1,300 3,300 0,900 2,050 1,300 2,690 0,900 2,060 1,300 2,500 1,100 1,690 1,500 2,230 1,100 1,640 1,400 2,640 1,100 2,180 1,400 3,130 1,100 1,700 1,500 2,210 1,050 1,950 1,450 2,700 1,000 2,630 1,500 3,480 0,923 3,450 1,335 4,590 1,102 2,990 1,410 3,830 1,150 1,790 1,500 3,700 0,987 3,050 1,470 3,840 0,800 1,200 1,200 1,970 1,300 2,120 1,500 3,120 1,300 2,190 1,500 2,920 0,900 1,210 1,300 1,850 1,240 1,300 1,300 1,850 1,100 1,460 1,400 2,340 1,840 2,000 2,000 2,000 2,020 1,850 1,850 1,850 1,850 1,870 1,870 1,800 1,870 1,870 1,870 1,920 2,160 2,160 1,920 1,790 2,026 2,000 1,850 2,50 – К, м 2,50 2,67 2,50 2,50 2,50 2,50 2,50 2,50 2,50 2,50 2,50 2,50 2,50 2,50 2,50 2,65 2,75 2,72 2,64 2,36 2,48 2,50 2,50 2,50 2,50 Ва, м 9,04 7,37 7,61 7,37 7,61 7,43 8,53 7,14 7,14 5,79 7,25 8,53 5,79 7,14 8,52 – 8,65 9,03 8,10 – – – – – – La, м 2,40 2,35 2,35 2,35 2,35 1,00 1,00 1,00 1,00 1,10 1,10 1,10 1,10 1,10 1,20 – 2,50 2,50 2,50 1,01 2,35 2,35 1,00 1,01 1,10 aх, м 0,60 0,90 0,90 0,90 0,90 0,60 0,60 0,60 0,60 0,70 0,70 0,70 0,70 0,70 0,70 0,90 0,90 0,90 0,90 0,70 0,90 0,90 0,60 0,60 0,70 aу, м 7610 7800 7700 8020 7225 7080 8200 9000 8480 7100 6725 7450 7225 6600 9050 – 11950 12775 11000 4000 7260 7450 6800 6800 6650 m0, кг 17835 13025 14925 13245 15000 15305 18425 19150 15630 15250 14950 16000 15375 14825 23700 22600 19685 22000 23165 – – – – – – ma, кг Шифр ТС 8 9 9 9 9 9 9 9 9 9 9 9 9 9 9 9 9 9 9 11 11 12 12 12 12 современным автомобилям информация отсутствует. 196 * Примечание. Поскольку по современным автомобилям информация отсутствует, при отборе параметров ах и ау для * Примечание. устаревшие модели в качестве аналогов при отборе параметров производства. ах и ау, поскольку по импортных автомобилейДаны следует пользоваться данными аналогичных автомобилей отечественного L, м Модель ТС Окончание приложения E Приложение Ж Форма задания на выполнение курсового проекта МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное бюджетное образовательное учреждение высшего образования «Тольяттинский государственный университет» Институт машиностроения Кафедра «Проектирование и эксплуатация автомобилей» УТВЕРЖДАЮ Зав. кафедрой ПиЭА _______________________ (подпись) (И. О. Фамилия) «____»___________20___г. ЗАДАНИЕ на выполнение курсового проекта Студент ________________________________________ 1. Тема__________________________________________________ _______________________________________________________ 2. Срок сдачи законченного курсового проекта _______________ 3. Исходные данные к курсовому проекту изложены в постановлении следователя о проведении автотехнической экспертизы по ДТП. 4. Содержание пояснительной записки курсового проекта (перечень подлежащих разработке вопросов, разделов): 4.1. Вводная часть. Исходные данные к экспертному исследованию. 4.2. Анализ обстоятельств ДТП. 4.3. Экспертное исследование ДТП. 4.4. Выводы и заключение по экспертизе. 5. Ориентировочный перечень графического и иллюстративного материала (с точным указанием чертежей и форматов их представления) – масштабная схема ДТП (формат А3). — 180 — 6. Рекомендуемые учебно-методические материалы: 6.1. Иларионов, В.А. Экспертиза дорожно-транспортных происшествий : учебник для вузов / В.А. Иларионов. – М. : Транспорт, 2013. – 255 с. 6.2. Суворов, Ю.Б. Судебная дорожно-транспортная экспертиза : учебное пособие / Ю.Б. Суворов. – 208 с.− М. : Право и закон, 2013. – 208 с. 7. Дата выдачи задания «_____»________________20____г. Руководитель курсовой работы __________________ ____________________ Представитель работодателя __________________ ____________________ Задание принял к исполнению ___________________ ____________________ (подпись) (подпись) (подпись) — 181 — (И. О. Фамилия) (И. О. Фамилия) (И. О. Фамилия) Приложение И ПОСТАНОВЛЕНИЕ о назначении автотехнической экспертизы г. Тольятти «___» ________20___г. Следователь СУ при Управлении МВД России по г. Тольятти Самарской области капитан полиции Петров П.П., рассмотрев материалы уголовного дела №___/20___, возбужденного по признакам преступления, предусмотренного ч. 1 ст. 264 УК РФ, УСТАНОВИЛ: «___»_______20___г. в ___ ч ___ мин при следовании по ул. Центральной г. Тольятти со стороны ул. Победы в направлении ул. Свободы водитель ________, управляя технически исправным а/м ____________________, совершил наезд на пешехода ________, причинив ему тяжкие телесные повреждения. А/м _______________ с полной нагрузкой двигался в правом ряду со скоростью _____ км/ч на расстоянии _____ метров от правого края проезжей части. Дорожные условия на момент ДТП: ___________ асфальт; профиль дороги горизонтальный; ширина проезжей части ________ метров; движение двустороннее. Ограничение скорости ____ км/ч. На месте ДТП имеется двойной след торможения юзом длиной ______ метров. Видимость в направлении движения ТС более _____ метров; обзорность с места водителя по направлению движения пешехода не ограничена. Наезд произошел передней частью ТС в процессе его торможения на расстоянии ______ метров от начала следа юза. Место наезда на пешехода находится на расстоянии ______ метров от правого края проезжей части дороги. Пешеход в возрасте _____ лет пересекал проезжую часть в поперечном направлении справа налево по ходу движения автомобиля в темпе ________________ шага (бега). Опасная ситуация для движения водителя возникла в момент выхода пешехода на проезжую часть дороги. На основании изложенного и руководствуясь ст. 195 (196) и 199 УПК РФ, — 182 — ПОСТАНОВИЛ: 1. Назначить по настоящему делу автотехническую экспертизу, производство которой поручить ЭКЦ ГУ МВД России по Самарской области в лице эксперта __________________________. 2. На разрешение эксперта поставить следующие вопросы: 1) с какой скоростью двигалось ТС, исходя из длины тормозного следа; 2) на каком удалении от места наезда на пешехода находилось ТС в момент выхода пешехода на проезжую часть? 3) имел ли водитель ТС техническую возможность избежать наезда на пешехода путем экстренного торможения при расчетной скорости движения; 4) имел ли водитель техническую возможность избежать наезда на пешехода путем маневра объезда пешехода при расчетной скорости движения; 5) какими пунктами ПДД РФ должны были руководствоваться участники ДТП и противоречат ли их действия требованиям ПДД РФ. 3. Руководителю ЭКЦ разъяснить эксперту права и обязанности по ст. 57 УПК РФ и предупредить его об уголовной ответственности по ст. 307 УК РФ. Следователь _____________________________ Петров П.П. — 183 — Приложение К Приложение К ИСХОДНЫЕ ДАННЫЕ К ПОСТАНОВЛЕНИЮ О НАЗНАЧЕНИИ АВТОТЕХНИЧЕСКОЙ ЭКСПЕРТИЗЫ ИСХОДНЫЕ ДАННЫЕ К ПОСТАНОВЛЕНИЮ О НАЗНАЧЕНИИДТП АВТОТЕХНИЧЕСКОЙ ЭКСПЕРТИЗЫ ДТП 1. Обстоятельства ДТП: _________________________________ 1. Обстоятельства ДТП: _______________________________________________ _______________________________________________________ ____________________________________________________________________ _______________________________________________________ ____________________________________________________________________ _______________________________________________________ _______________________________________________________ ____________________________________________________________________ _______________________________________________________ ____________________________________________________________________ _______________________________________________________. __________________________________________________________. SВ = 35 м Sю = 16,5 м I Va II S'ю= 5,7м VП •× III Sуд Обводное шоссе Рис. 1. Схема наезда ТС на пешехода при попутном движении: Рис. Схема наездапоявления ТС на пешехода при попутном движении: Iводителя; – ТС в момент I –1.ТС в момент пешехода в поле видимости появления в поле водителя; II –× ТС при наезде; III – ТС II – ТСпешехода при наезде; III видимости – ТС при остановке; – место наезда; Va – направление и скорость ТС; V – направление и скорость пешехода; П при остановке; × – место наезда; Va – направление и скорость ТС; VП – Sю – длина тормозного следа; SВ – видимость пешехода; Sуд – удаление ТС следа; SВ – видимость направление и скорость Sю – длина тормозного от места наезда в пешехода; момент обнаружения водителем пешехода пешехода; Sуд – удаление ТС от места наезда в момент обнаружения водителем 2. Дорожные условия: состояние дорожного покрытия пешехода ____________, пешеходный переход (регулируемый, нерегулируемый) _________________; движение ТС (количество полос) 2. Дорожные условия: состояние дорожного покрытия ____________, _______; ширина проезжей части ________ м; наличие дорожных пешеходный переход (регулируемый, нерегулируемый) _________________; знаков ____________________. движение ТС (количество полос) _______; ширина проезжей части ________ м; 3. Наличие следов транспортного средства: при наличии торналичие дорожных знаков ____________________. мозного следа: длина следа _______ м, расстояние от тормозного следа до края проезжей части ________ м. 190 4. Расположение места наезда на пешехода: расстояние от места наезда до края проезжей части ________м, расстояние от места наезда на пешехода до начала следа _______ м. — 184 — 5. Условия видимости: –– видимость дороги с места водителя в направлении движения __ м; –– видимость пешехода в темное время суток ___ м. 6. Скорость движения транспорта: скорость движения автомобиля (автомобилей) ______________________________________. 7. Степень загруженности транспорта ____________________. 8. Техническое состояние транспорта ____________________. 9. Возраст и пол пешехода _____________________________. 10. Направление движения пешехода по отношению к ТС (справа, слева, попутное, встречное)___________________________. 11. Темп движения или скорость движения пешехода ____ км/ч. 12. Расстояние от препятствия, ограничивающего обзорность с места водителя, до пешехода, вышедшего на проезжую часть, __________ м. 13. Боковой интервал между ТС, совершившим наезд, и препятствием, ограничивающим обзорность с места водителя ________ м. 14. Условия обзорности пешехода с места водителя (неограниченная, ограниченная: условиями видимости, неподвижным объектом, попутным или встречным ТС) __________ м. 15. Какой частью ТС произошел наезд на пешехода (передней частью, боковой частью): _________________________________. 16. На каком расстоянии от передней (при наезде боковой частью) или от боковой (при наезде передней частью) части находится точка контакта с пешеходом ________________ м. 17. Какой момент принять за момент возникновения опасности _______________________________________________________ ______________________________________________________. — 185 — Приложение Л Образец титульного листа МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ТОЛЬЯТТИНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ Институт машиностроения Кафедра «Проектирование и эксплуатация автомобилей» КУРСОВОЙ ПРОЕКТ по основам автотехнической экспертизы на тему _________________________________________________ _______________________________________________________ СТУДЕНТ(КА) _______________________________ ___________ (инициалы, фамилия) (личная подпись) РУКОВОДИТЕЛЬ _____________________________ __________ (ученая степень, звание, инициалы, фамилия) (личная подпись) «____»__________________20___г. Тольятти, 20__ г. — 186 —