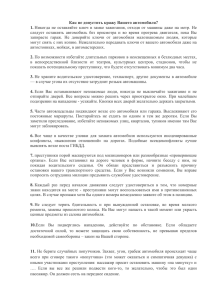
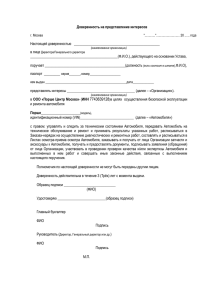
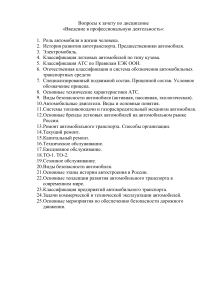
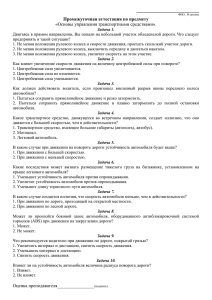
Перевод: украинский - русский - www.onlinedoctranslator.com МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ КИРОВОГРАДСКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Факультет проектирования и эксплуатации машин Кафедра "Эксплуатация и ремонт машин" АВТОМОБИЛИ МЕТОДИЧЕСКИЕ УКАЗАНИЯ для выполнения лабораторных работ по дисциплине "Автомобили" для студентов направления 6.070106 "Автомобильный транспорт" Разделы: "Теория эксплуатационных свойств автомобиля", "Рабочие процессы и основы расчета автомобиля" Кировоград 2008 МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ КИРОВОГРАДСКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Факультет проектирования и эксплуатации машин Кафедра "Эксплуатация и ремонт машин" АВТОМОБИЛИ МЕТОДИЧЕСКИЕ УКАЗАНИЯ для выполнения лабораторных работ по дисциплине "Автомобили" для студентов направления 6.070106 "Автомобильный транспорт" Разделы: "Теория эксплуатационных свойств автомобиля", "Рабочие процессы и основы расчета автомобиля" Утверждено На заседании кафедры ЭРМ Протокол №17 от 20.05.2008г. Кировоград 2008 И.М. Соколенко, Аулин В.В., А.Ю. Жулай, С.В. Лысенко, Д.М. Барановский, В.М. Бобрицкий, Д.В. Голубь. Методические указания для выполнения лабораторных работ по дисциплине "Автомобили" по разделам: "Теория эксплуатационных свойств автомобиля" и "Рабочие процессы и основы расчета автомобиля" для студентов направления 6.070106 "Автомобильный транспорт". – Кировоград: КНТУ, 2008. – 41с. Рецензент:канд. техн. наук Чабанный В.Я. Методические указания для выполнения лабораторных работ по дисциплине "Автомобили" по разделам: "Теория эксплуатационных свойств автомобиля" и "Рабочие процессы и основы расчета автомобиля" для студентов направления 6.070106 "Автомобильный транспорт". Составители: И.М. Соколенко– канд. техн. наук, доцент кафедры "Эксплуатация и ремонт машин"; В.В. Аулин– канд. физ.-мат. наук, профессор кафедры "Эксплуатация и ремонт машин"; О.Ю. Жулай– ассистент кафедры "Эксплуатация и ремонт машин"; С.В. Лысенко– канд. техн. наук, доцент кафедры "Эксплуатация и ремонт машин"; Д.М. Барановский– канд. техн. наук, старший преподаватель кафедры "Эксплуатация и ремонт машин"; В.М. Бобрицкий– канд. техн. наук, старший преподаватель кафедры "Эксплуатация и ремонт машин"; Д.В. Голубь– аспирант кафедры "Эксплуатация и ремонт машин"; Ответственный за выпуск: И.М. Соколенко. Компьютерный набор и верстка О.Ю. Жулай. © "Автомобили" по разделам "Теория эксплуатационных свойств автомобиля" и "Рабочие процессы и основы расчета автомобиля" Составители: И.М. Соколенко, А.Ю. Жулай. 2008 Содержание Общие указания по выполнению лабораторных работ…………………….. 5 Лабораторная работа №1 Определение координат центра масс автомобиля ............................................. .... 7 Лабораторная работа №2 Определение коэффициента сопротивления качению и коэффициента сцепления покрышки с поверхностью дороги …………………………………………………………….. 11 Лабораторная работа №3 Определение характеристики упругих свойств подвески автомобиля…. 17 Лабораторная работа №4 Определение характеристик эластичности покрышек …………………………. 22 Лабораторная работа №5 Определение кинематических зависимостей карданной передачи с асинхронными шарнирами .......................................... ...................…………………………… … 27 Лабораторная работа №6 Определение кинематических управлениягидроусилителем и силовых параметров рулевого ………………………………………………… …………... 31 Лабораторная работа №7 Определение эффективности автомобиля................ Лабораторная работа №8 рабочей тормозной системы 34 Определение топливной характеристики автомобиля …………………………… Список литературы…………………………………………… 37 использованной 41 Общие указания по выполнению лабораторных работ Лабораторные занятия по дисциплине "Автомобили" по разделам "Теория эксплуатационных свойств автомобиля" и "Рабочие процессы и основы расчета автомобиля" обязательны для студентов ІІІ курса направления 6.070106 "Автомобильный транспорт" дневной и заочной формы обучения. Целью данных лабораторных работ является закрепление теоретических знаний полученных на лекционных занятиях, приобретение практических навыков по исследованию основных параметров конструкции автомобилей, требований к основным узлам трансмиссии, ходовой части, рулевому управлению автомобилей. После выполнения лабораторных работ производится оформление отчета и их защита. Отчет по лабораторным занятиям должен содержать тему работы, исходные данные для расчета, расчет и анализ экспериментальных данных результатов (вывода), ответы на контрольные вопросы. При составлении данных методических указаний была учтена кредитномодульная система организации учебного процесса. За каждую проделанную лабораторную работу и ее защиту студент набирает определенное количество баллов (табл. 1). Таблица 1. № п/п Тема лабораторной работы Объе м часов 1 2 3 Максимальн ое количество баллов 4 Баллы начисленные по каждому занятию вводят в рейтинг-программу, которая переводит их в общую для всех участников учебного процесса шкалу, формируя тем самым рейтинг студента по одному из видов учебной программы – лабораторных работ. Рейтинг по лабораторным занятиям рассчитывается следующим образом: 𝑟лр = 𝑓 ⋅ (minлр ,maxлр , слр ) = 2 + 3 ⋅ (слр − minлр )/(maxлр − minлр ), где𝑟лр - частичный рейтинг по лабораторным занятиям; minлр - минимальный полученный балл в соответствии с рейтинговым регламентом; maxлр - максимальный полученный балл в соответствии с рейтинговым регламентом; 𝑐лр - фактически полученный балл согласно рейтинговому регламенту. Таблица 2. Вид учебной работы Лабораторн ые работы Баллы минимум максимум 4,5 8 фактически Частичны й рейтинг Общая экзаменационная оценка учитывает частичный рейтинг, полученный по следующим видам работ: лекция, практические, лабораторные занятия. Лабораторная работа №1 Определение координат центра масс автомобиля Цель работы:Освоить методику экспериментального определения координат центра масс и установить влияние на них весового состояния автомобиля. Оборудование:Установка для определения координат центра масс модели автомобиля, груза, масштабная линейка, модель автомобиля, микрокалькулятор. Задачи работы:Получить экспериментальные данные и произвести расчет координат центра масс модели автомобиля и указать их на схеме автомобиля; проанализировать влияние весового состояния автомобиля на значение параметров координат центра масс. Теоретические положения Координаты центра масс зависят от компоновочной схемы автомобиля, его назначения, объемного веса груза и его размещения и, следовательно, могут существенно изменяться при эксплуатации. Как правило условно считают, что центр масс расположен на продольной оси автомобиля и определяется продольными координатами а и b (расстояние от проекции центра масс на опорную плоскость в соответствии с передней и задней осями) и высотой над опорной поверхностью Координаты центра масс автомобиля могут быть определены расчетным методом по заданным массам и координатам центров масс его отдельных частей или экспериментально взвешиванием автомобиля в горизонтальном и наклонном положениях. В практике чаще прибегают к экспериментальному определению центра масс автомобиля. При определении координат a и b автомобиль находится в горизонтальном положении. Последовательным взвешиванием определяют полный вес автомобиля G и вес, приходящийся на колеса передней оси G1, и задней – G2. Замеряют базу автомобиля – L. Составляя уравнение равновесия относительно осей задних и передних колес, соответственно получают: 𝐺 𝐺 а = 2 ⋅ 𝐿;𝑏 = 1 ⋅ 𝐿; (1) 𝐺 𝐺 Для определения высоты центра масс автомобиль устанавливают на весы в наклонном положении (рис. 1б) и взвешиванием определяют нагрузку. 𝐺2′ , приходящееся в этом случае на колеса задней оси. Из условия равновесия относительно оси передних колес следует, что 𝐺2′ 𝐿cos𝛼 − Ghо sin𝛼 − 𝐺𝑎 cos𝛼 = 0, (2) где𝛼- угол наклона автомобиля к горизонтальной плоскости, 𝐻 𝛼 = arcsin 𝐿 , (3) где H- высота подставки;ℎ𝑜 - высота центра масс над плоскостью, проходящей через центры осей колес. а) б) Рис. 1. Схема определения координат центра масс модели автомобиля: а – при определении G1, для расчетов координаты b; б – при определении G2, для расчетов координаты hg; 1 – модель автомобиля; 2 – весы; 3 – подставка; 4 – опорная плита. Учитывая выражение (1), после преобразований находим: 𝐿 𝐺2 −𝐺2 ℎо = 𝐺 ⋅ ( tg𝛼 ). (4) Итак, высота центра масс над опорной поверхностью будет составлять: ℎ𝑔 = ℎо + 𝑟ст , где rст – статический радиус колеса. Методика и порядок выполнения работы Экспериментальное определение координат центра масс на модели автомобиля (груженного и пустого) рекомендуется выполнять в такой последовательности. 1. Установите модель автомобиля на весы. 2. Взвесить модель. 3. Установить переднее колесо модели автомобиля на весы, а заднее на подставку и определить нормальную нагрузку, приходящуюся на переднюю ось (рис. 1,а). 4. Установить заднее колесо модели автомобиля на весы, а переднее на подставку и определить нормальную нагрузку, приходящуюся на заднюю ось. 5. Установить одну подставку на другую, а на них переднее колесо модели автомобиля (рис. 1,б) и определить нормальную нагрузку, приходящуюся на заднюю ось наклонной модели автомобиля. 6. Замеряйте линейкой базу модели автомобиля, статический радиус колеса и высоту подставки. 7. Результаты измерений занести в табл. 1. 8. Установите груз в кузов модели автомобиля. 9. Повторить операции в соответствии с п. 2-5,7 для груженого автомобиля. 10. На основе результатов измерений параметров (табл. 1) по формулам рассчитать величины a, b, hо, hg и их значение занести в табл. 2. Таблица 1 Результаты измерения параметров Весовое состояние модели Единица автомобиля Измеряемый параметр измерени я пустого груженого Вес модели автомобиля, Gа Н Нормальная нагрузка, приходящаяся на переднюю ось, Н G1 Нормальная нагрузка, приходящаяся на заднюю ось, Н G2 Нормальная нагрузка, приходящаяся на заднюю ось Н при наклонном положении модели автомобиля,𝐺2′ База модели автомобиля, L м Статический радиус колеса, rст м Высота подставки, H м Таблица 2 Результаты расчетов Весовое состояние модели Единица автомобиля Рассчитанный параметр измерени я пустого груженого Расстояние от проекции центра масс на опорную плоскость к м передней оси, a Расстояние от проекции центра масс на опорную плоскость к м задней оси, b Высота центра масс автомобиля над плоскостью, проходящей м через центры осей колес, hо Высота центра масс автомобиля над опорной поверхностью при м горизонтальном его положении, hg Анализ и выводы Проанализировать влияние весового состояния автомобиля на значения параметров a, b и hg. Лабораторная работа №2 Определение коэффициента сопротивления качению и коэффициента сцепления покрышки с поверхностью дороги Цель работы: Освоить методику экспериментального определения: а) коэффициента сопротивления качению и установить влияние на него давления воздуха в покрышках и нормальной нагрузки; б) коэффициента сцепления покрышки с дорогой и установить влияние на него состояния опорной поверхности. Оборудование:Установка для определения коэффициента сопротивления качению и коэффициента сцепления покрышки с опорной поверхностью, модель автомобиля, груза, микрокалькулятор. Задачи работы:получить экспериментальные данные и произвести расчеты коэффициента сопротивления качению и коэффициента сцепления покрышки с сухим и влажным покрытием опорной поверхности; проанализировать как изменяющийся коэффициент сопротивления качению при изменении нагрузки и состояния покрытия дороги. Теоретические положения Коэффициент сопротивления качению. Вес автомобиля, приходящийся на колесо, деформирует покрышку и опорную поверхность. При этом чем более мягкая дорога, тем больше ее деформация и меньше деформация покрышки, и наоборот. В результате при их деформации на внутреннее трение в покрышке и дороге, и трение между ними тратится энергия. При качении колеса под действием толкающей силы Р (рис. 1) внутреннее трение в покрышке и дороге и трение между ними препятствует росту деформации в передней зоне поверхности контакта покрышки с дорогой и уменьшению ее в задней зоне. Рис. 1. Распределение сил, действующих на колесо автомобиля. В результате эпюра нормальных давлений симметрична в случае неподвижного колеса, а при качении изменяется, увеличиваясь спереди и уменьшаясь сзади. Равнодействующая этих реакций Rz, перпендикулярная направлению движения и равная силе давления колеса Gk, на опорную поверхность, при качении колеса смещается в сторону движения на расстояние а. Реакция Rz создает относительно центра колеса момент сопротивления качению Mf: Mf=Rz∙a(1) В случае равномерного движения этот момент уравновешивается моментом, создаваемым толкающей силой Р на плечо, равное динамическому радиусу колеса rд. Rz∙a = P∙rд(2) 𝑎 Откуда:𝑃 = 𝑅𝑧 𝑟 (3) д В результате трения между покрышкой и дорогой в элементах поверхности их контакта возникают касающиеся реакции, действующие в сторону, противоположную направлению толкающей силы Р. На твердой дороге эти реакции параллельны направлению движения и составляют равнодействующую Rx, которая при равномерном движении равна силе сопротивления качению Рfk. 𝑎 Величина𝑟 = 𝑓называется коэффициентом сопротивления качению колеса. д Учитывая, что Rz = Gk, выражение (3) можно записать в виде Откуда: 𝑃fk = 𝐺𝑘 ⋅ 𝑓. (4) 𝑃fk , (5) где Рfk – сила сопротивления качению колеса; Gk – нормальная нагрузка на колесо или для автомобиля: 𝑃 𝑓 = 𝐺𝑓, (6) где Pf – сила сопротивления качению всех колес автомобиля; G – вес автомобиля. Коэффициент сопротивления качению f, в основном зависит от материала и конструкции покрышек, давления в них воздуха, жесткости и состояния дороги, жесткости подвески и режима движения автомобиля. Применение материалов с малым внутренним трением, уменьшение жесткости кордной ткани и числа ее слоев, облегчение протектора и другие конструктивные меры значительно снижают гистерезные потери в покрышках. Для каждого типа покрышек в зависимости от твердости и состояния грунта (снег и др.) существует оптимальное давление воздуха, при котором общее сопротивление качению минимально. При движении по неровному пути коэффициент f возрастает вследствие жесткости подвески и амортизаторов. Он также растет при увеличении высоты почвозацепов покрышки. Следует отметить, что на неровных и мягких поверхностях коэффициент f снижается при увеличении диаметра колеса. Из факторов, характеризующих режим движения покрышек, наиболее влияет на коэффициент f скорость движения и действующие на колеса 𝑓= 𝐺𝑘 вертикальные нагрузки и боковая сила. Воздействие скорости на сопротивление качению по мягким поверхностям зависит от их физико-механических свойств. По мере увеличения нагрузки на колесо коэффициент f возрастает, так как увеличиваются деформации покрышки и дороги. В случае действия боковой силы, возникающей при повороте, поперечном наклоне дороги или боковом ветре, коэффициент f значительно увеличивается вследствие дополнительных боковых деформаций покрышек. Режим движения, влажность дороги и температура окружающего воздуха отражаются на тепловом состоянии покрышек. С увеличением нагрева покрышек внутреннее трение в ее материале, а значит, и сопротивление качению снижаются. При температуре 70...80оС коэффициент f меньше, чем у холодных покрышек примерно на 12...15%. Коэффициент сцепления. Одним из основных факторов, определяющих характер качения колеса, служит коэффициент сцепления покрышки с дорогой. Условно различают коэффициент сцепления в продольном направлении𝜙𝑋 , характеризующий касательное взаимодействие колеса с дорогой, и коэффициент сцепления в поперечном направлении𝜙𝑌 , оценивающий способность колеса противодействовать боковой силе. Коэффициентом сцепления колеса с опорной поверхностью в продольном направлении𝜙𝑋 называют отношение максимальной касательной реакции Rx.max, при которой началось скольжение колеса, к соответствующей нормальной реакции Rz (рис. 2). 𝑅 𝜙х = 𝑥.max . (7) 𝑅 𝑧 Рис. 2. Основные факторы, действующие на покрышку колеса автомобиля: а – на жестких дорожных покрытиях; б – на дорожных покрытиях с высоким сопротивлением качению; 1 – покрышка; 2 – жесткое дорожное покрытие; 3 – дорожное покрытие с высоким сопротивлением качению (песок, снег, бездорожье). Касательное взаимодействие обусловлено: трением между покрышкой и опорной поверхностью; сопротивлением сдвигу опорной поверхности; глубиной погружения колеса в опорную поверхность. На твердой дороге основное значение имеет поверхностное трение, а на деформируемой дороге – сопротивление смещению и погружению колеса. Наиболее распространенная характеристика сцепных свойств колеса – это зависимость коэффициента сцепления𝜙𝑋 от коэффициента продольного скольжения колеса Sб (рис. 3). Под коэффициентом продольного скольжения колеса понимают отношение скорости продольного скольжения колеса к его колесной скорости. Рис. 3. Зависимость коэффициента продольного скольжения колеса Sб. сцепления𝜙𝑋 от коэффициента Опытами установлено, что Sб существенно зависит от типа покрышки, состояния дорожной поверхности, скорости движения автомобиля, площади контакта покрышки с опорной поверхностью и рисунка протектора. Процессы, происходящие между покрышкой и опорной поверхностью при скольжении колеса назад, вперед и в сторону, не совсем идентичны. Но эта разница в большинстве случаев не значительна. Поэтому коэффициент бокового сцепления колеса с поверхностью дороги определяется выражением (8) если изменить Rx.max максимальной боковой реакцией Ry.max, перпендикулярной плоскости колеса: 𝑅 𝜙𝛶 = 𝛶,max . (8) 𝑅𝑍 Схема установки для экспериментального определения коэффициентов f и𝜙𝑋 показана на рис. 4. Рис. 4. Схема установки для экспериментального определения коэффициентов f и𝜙𝑋 : 1 – покрытие дороги, 2 – автомобиль, 3 – динамометр, 4 – лебедка. Методика и порядок выполнения работы Операции по определению коэффициента сопротивления качению и коэффициента сцепления выполняются в следующей последовательности: 1. Установите модель автомобиля на опорную плиту установки. 2. Установить динамометр 3 и закрепить на нем трос лебедки 4. 3. Равномерно вращая рукоятку лебедки, следят за показаниями динамометра. 4. Результаты измерений занести в табл. 1. 5. Установить груз в кузов модели автомобиля и повторить операции в соответствии с пп. 3, 4. 6. Снять груз с модели автомобиля. 7. Заблокировать колеса автомобиля. 8. Равномерно вращая рукоятку лебедки, следят за показаниями динамометра. 9. Результаты измерений занести в табл. 2. 10. Вес модели автомобиля пустой и груженой определяют взвешиванием на весах, а результаты заносятся в таблице 1, 2. 11. Смочить водой поверхность опорной плиты и повторить операции в соответствии с пп. 8, 9. 12. Установить груз в кузов модели автомобиля и повторить операции в соответствии с пп. 8, 9, 11, а результаты занести в табл. 2. 13. На основе результатов измерений рассчитать коэффициент сопротивления качению и его значение занести в таблицу. 14. По данным измерений определить коэффициент сцепления𝜙𝑋 и его значение занести в таблицу Таблица 1 Результаты измерений силы сопротивления качению и расчетов коэффициента сопротивления качению Измерений и рассчитанные параметры Pf, H G, H Пустая модель Нагруженная модель f Таблица 2 Результаты измерений касательной силы в пятне контакта и расчетов коэффициента сцепления Состояние покрытия Измеряемые и рассчитанные параметры сухое влажное Rx, H Пустая G, H модель 𝜙 Rx, H Нагруженная G, H модель 𝜙 Анализ и выводы Сделать выводы как изменяются коэффициенты f и𝜙от состояния дороги, погрузки и давления воздуха в покрышках. Лабораторная работа №3 Определение характеристики упругих свойств подвески автомобиля Цель работы:Экспериментальное определение упругих свойств подвески автомобиля (с учетом совместной работы основного и дополнительного упругих элементов) и показатели плавности хода. Оборудование:Стенд, представляющий собой подвеску автомобиля с погрузочным устройством для создания вертикальных усилий на упругий элемент; измерительные устройства, позволяющие определить параметры (вертикальная нагрузка Z, деформация упругого элемента F, упругая характеристика Z = f(F) Задачи работы: - получить экспериментальные данные и выстроить упругую характеристику подвески; - определить диапазон прогибов основного и дополнительного упругих элементов; - сравнить жесткость основного и комбинированного (при совместном действии основного и дополнительного) упругих элементов; - сравнить экспериментально полученную упругую характеристику с оптимальной; – определить показатели плавности хода. Теоретические положения Упругие свойства подвески автомобиля характеризуются изменением деформации упругих элементов подвески от вертикальной реакции дороги. Эта зависимость позволяет определить показатели плавности хода автомобиля. В качестве упругого элемента чаще всего используются стальные упругие элементы (листовая рессора, торсион, пружина). Они обеспечивают работу подвески в основном диапазоне перемещений колеса относительно скелета автомобиля. Однако эти упругие элементы имеют существенный недостаток в том, что их жесткость постоянна, то есть изменяется прямо пропорционально деформации. А лучшая плавность хода автомобиля обеспечивается подвеской с переменной жесткостью. Для улучшения упругой характеристики подвески с одинарным упругим стальным элементом применяют дополнительные упругие элементы (стальные и резиновые), которые вступают в работу при определенных деформациях подвески. Благодаря большой энергоемкости и нелинейной характеристике упругих свойств резины, жесткость подвески в случае совместной работы стального и резинового элементов резко возрастет и при увеличении прогиба подвески продолжает расти. Такая закономерность изменения жесткости комбинированного упругого элемента позволяет улучшить упругую характеристику и повысить ее надежность. Конструкция подвески включает в себя следующие принципиальные элементы: направляющее устройство, упругое и гасячее устройства, стабилизаторы. Направляющее устройство должно наиболее полно обеспечить правильную кинематику перемещения колес относительно скелета автомобиля (постоянство колеи или базы, углов установки колес и др.), а также быть надежным при передаче всех сил и моментов от ведущих колес к скелету автомобиля. Упругое устройство подвески должно обеспечить необходимую характеристику упругой связи колес с остовом автомобиля, сохраняя при этом надежное взаимодействие с дорогой и обеспечить нужную плавность движения автомобиля в различных дорожных условиях. Желательно, чтобы упругое устройство подвески имело переменную жесткость. Стальной упругий элемент (пивелиптическая рессора, цилиндрическая пружина или торсион), имеют постоянную жесткость, поэтому в конструкции подвески необходимо предусмотреть устройства, обеспечивающие переменную жесткость (двойные или тройные упругие элементы, дополнительные упругие резиновые элементы и др.). Характеристику упругости подвески строят в координатах F, Z подобно графику на рис. 1. Она включает, следующие показатели: Zст, Zдин- статическая и динамическая нагрузка автомобиля; Fст, Fдин– статический и динамический прогиб упругих элементов. Рис. 1. Упругая характеристика подвески автомобиля. Динамический прогиб упругих элементов принимают в зависимости от статического, учитывая, что: Fдин= (0,5...0,7)·Fст – для легковых автомобилей; Fдин= (0,7...0,9)·Fст – для автобусов; Fдин= (0,8...1,1)·Fст – для грузовых автомобилей Значения динамической нагрузки принимают исходя из того, что: Zдин= (2...3)·Zст – для автомобилей, работающих в основном на дорогах с искусственным покрытием; Zдин=(3...4)·Zст – для автомобилей, работающих в основном на грунтовых дорогах и в условиях бездорожья. В случае построения характеристики упругих свойств подвески с дополнительным резиновым упругим элементом учитывают, что деформация упругого резинового элемента Fгум не должна превышать половины его высоты hгум, т.е.0,5hрезин. Определяя координаты характерных точек характеристики упругих свойств подвески с двойным упругим элементом, необходимо учесть, что дополнительный упругий элемент должен вступать в работу при (0,6…0,7) Zст. При таковой характеристике подвески обеспечиваются нужные характеристики плавности хода. Основные показатели оценки плавности хода – частоты свободных колебаний подрессоренных и неподрессоренных масс, скорость, ускорение и изменяемость ускорения подрессоренных масс при колебаниях автомобиля. Частоты свободных колебаний подрессоренных масс, Гц: 1 𝑔 𝑊н = 2𝜋 ⋅ √𝐹 , (1) cт 𝑍cт где𝐹cт = С - статический прогиб подвески, м; Zст – статическая нагрузка на подвеску данного моста, Н; С – жесткость подвески, Н∙м-1. Плавность хода грузовых автомобилей считают удовлетворительной, если частота свободных колебаний подрессоренных масс Wн=1,3...1,7 Гц. При этом статический прогиб подвески составит 0,08…0,13 м (меньшее значение для задней подвески, больше для передней). После установки статического прогиба определяется действительная частота свободных колебаний подрессоренных масс, связанных с передней и задней подвесками. Обнаруженные частоты называются низкими. Массы мостов автомобиля неподрессорены совершают высокочастотные свободные колебания, обусловленные жесткостью покрышек. 1 ∑С 𝑊в = 2𝜋 ⋅ √ 𝑚 𝑁 , (2) 𝑀 где∑ С𝑁 - суммарная жесткость покрышек данного моста, Н∙м-1; mM- масса моста, которая может быть принята равной 0,1 (передний мост) и 0,15 (задний мост) массы загруженного автомобиля, приходящейся на соответствующие мосты. При отсутствии данных о жесткости покрышек автомобиля ориентировочно возможно принять Wв=6...8,5 Гц (меньшее значение – передняя подвеска, большее – задняя). Помимо свободных колебаний, автомобиль совершает и вынужденные, вызванные неровностями дороги. Они имеют частоту, Гц: 𝑉 𝑊вим = 𝑆𝑎 , (3) где Va – скорость движения автомобиля, м/с; S- длина волны неровностей, м, (на дорогах с жестким покрытием преобладает длина от 0,5 до 5 м.) Из этой зависимости следует, что при скоростях движения от 0 до 17 м/с (60 км/ч) частота вынужденных колебаний может достигать 3,4 Гц при S=5 м и 34 Гц при S=0,5 м. Таким образом , в этом интервале скоростей движения возможно появление резонансных колебаний как подрессоренных масс (низкочастотный резонанс), так и неподрессоренных (высокочастотный резонанс). Резонансных колебаний можно избежать подходящим подбором упругих свойств подвески. Порядок выполнения работы Установите в нулевое положение измерительные устройства и 1. приборы. 2. Погрузочным устройством установить нагрузку Zi, соответствующую началу работы дополнительного упругого элемента и записать показания. После этого установить максимальную нагрузку и снова записать показания. 3. Разгрузить стенд, а затем погрузочным устройством, создавая ступенчатую нагрузку, довести деформацию упругого элемента до максимального значения (ступенчатую нагрузку выбирают таким образом, чтобы получить 6…7 точек упругой характеристики). Обработка полученных данных 1. Определить значение деформации F, и нагрузку Z, соответствующую началу совместной работы основного и дополнительного упругих элементов, а также максимальное значение𝛿 maxи Zmax. 2. Вычислить величину относительной деформации дополнительного упругого элемента по формуле: 𝐹 −𝐹 𝛿 = max𝐹 1 , (4) 𝑔 где𝐹𝑔 - характерный размер дополнительного упругого элемента в свободном состоянии (без приложения нагрузки). 3. Заполнить таблицу и выстроить упругую характеристику подвески. Таблица 1 Деформаци Вертикальная нагрузка Частота Среднее № я упругого при повторностях колебани значение пп элемента F, й𝑊Н , с−1 Z, Н 1-я 2-я 3-я м 4. Определить жесткость при статической деформации и максимальной деформации: 𝑍 𝐶п.ст = 𝐹ст, (5) ст 5. Определить частоты деформации подвески: колебаний, соответствующих 𝑍max . (6) статической 𝐶п.max = 1 𝐹max 𝑔 𝑊𝐻 = 2𝜋 √Fcm. (7) Анализ и выводы В процессе выполнения работы необходимо установить: - целесообразность применения данного упругого элемента; - мера приближения полученной экспериментальной упругой характеристики к оптимальной; - плавность хода автомобиля и соответствие его показателям требованиям ДСТУ, ГОСТам и нормалям. Лабораторная работа №4 Определение характеристик эластичности покрышек Цель работы: ознакомиться с методикой экспериментального определения характеристик нормальной и боковой эластичности покрышек и установить влияние на них давления воздуха в покрышке; Установка для определения нормальной (радиальной) и боковой деформации покрышки, насос, манометр, микрокалькулятор. Задачи работы: получить экспериментальные данные и произвести расчеты для построения графиков – радиального прогиба покрышки, бокового смещения колеса, радиальной и боковой жесткости покрышки от нагрузки; Проанализировать влияние радиальной и боковой силы, давления воздуха в камерах, деформацию покрышки при различных нагрузках. Теоретические положения Покрышка непосредственно соприкасается с поверхностью дороги. Будучи наполненной сжатым воздухом, она становится упругой и способна воспринимать большие нагрузки. Под действием наружной нагрузки покрышка подвергается сложной деформации. Эту деформацию для удобства изучения обычно разделяют на три более простые: нормальную (радиальную), боковую и круговую (крутильную). Нормальная (радиальная) деформация покрышки Под действием приложенной к колесу нагрузкиPz покрышка начинает деформироваться, площадь ее контакта с дорогой увеличивается до тех пор, пока не наступит равновесие между нормальной реакцией дороги Rz и нагрузкой Pz (рис.1). Правая часть рисунка соответствует состоянию ненагруженной покрышки, а левая – деформирована радиальной нагрузкой. Деформация покрышки происходит при почти постоянном давлении воздуха в ней. Объем воздуха, вытесненный при деформации, по сравнению с объемом воздуха в камере очень мал, поэтому увеличение давления в покрышке вследствие ее нагрузки также мало и составляет 1…2%. Под действием нагрузки Pz происходит уменьшение расстояния от оси колеса до дороги из-за уменьшения высоты Н и увеличения ширины профиля В покрышки. Нормальный прогиб покрышки hz оценивают разностью свободного rk и статического rст радиусов колеса hz = rk – rст и является одной из наиболее важных характеристик покрышки. Чрезмерное увеличение прогиба приводит к повышению напряжений в покрышке, нагреву и, как следствие, снижению утомительной прочности покрышки. В этой связи относительная величина ℎ нормального прогиба (отношение 𝐻𝑍) покрышек обычной конструкции ограничивается значением 10…12%. Рис. 1. Схема нормальной Рис. 2. Схема определения нормальной деформации покрышки. деформации покрышки на установке: 1 – колесо; 2 – стрелка указателя; 3 – шкала. Для покрышек с регулирующим давлением воздуха и широкопрофильных это значение составляет 12...15%, а для арочных 15...20%. При определении нормальной деформации покрышки ее ступенчато нагружают нормальной нагрузкой.Pz (рис. 2). Помимо работоспособности нормальный прогиб определяет такой важный эксплуатационный параметр, как нормальная жесткость покрышки, непосредственно связанная с плавностью хода автомобиля, его демпферирующего свойства, нагрузкой в деталях ходовой части. Нормальная жесткость покрышкиCz определяется по отношению 𝑝 𝐶𝑍 = ℎ𝑍.(1) 𝑍 Обычная жесткость зависит от конструкции покрышки. При одинаковом давлении воздуха покрышки с диагонально расположенным кордом имеют на 10…20% большую нормальную жесткость, чем покрышка с радиальным кордом. На нормальную жесткость наиболее влияет давление воздуха в покрышке, в меньшей степени нагрузка на колесо. В реальных условиях эксплуатации жесткость зависит от динамических режимов погрузки, формы опорной поверхности, формы и размеров неровностей, температуры покрышки и других факторов. Боковая деформация покрышки Уступчивость покрышки в боковом направлении сильно влияет на устойчивость и управляемость автомобиля. Процесс бокового деформирования покрышки достаточно сложное явление. Приложенная к колесу боковая силаРу (рис. 3) изменяет деформацию покрышки, вызванную радиальной нагрузкой Pz. Происходит искривление формы профиля покрышки и изгиб ее в боковом направлении. В результате деформации покрышки под действием боковой силы расстояние от оси колеса до дороги уменьшается. Центр колеса несколько отходит от его средней плоскости, которая проходит через центр площади контакта протектора. Эту деформацию называют боковым упругим смещением колеса.hy – это линейное смещение центра колеса относительно площади контакта за счет упругих свойств покрышки под действием боковой силы, замеренное в центральной плоскости, параллельно опорной. При определении боковой деформации покрышки ее ступенчато нагружают боковой силой Ру (рис. 4). Максимальное значение боковой силы ограничивается сцеплением покрышки с дорогой. Рис. 3. Схема боковой Рис. 4. Схема определения боковой деформации покрышки. деформации покрышки на установке. 1 – колесо; 2 – стрелка указателя; 3 – шкала. Величина упругого бокового смещения колеса зависит от конструкции покрышки, ее грузоподъемности. Боковое упругое смещение называют боковой жесткостью покрышки.Су, и определяют по отношению: Р𝑦 𝐶𝑦 = ℎ .(2) 𝑦 Боковая жесткость покрышки в отличие от нормальной – это постоянная величина, которая практически не зависит от бокового смещения колеса. Колесная (тангенциальная) деформация покрышки При приложении к колесу крутящего момента и продольной силы происходит колесная деформация покрышки. Воздействие на колесо крутящего момента вызывает поворот обода колеса на некоторый угол относительно неподвижного контакта протектора покрышки. В связи со сложностью экспериментального определения тангенциальной деформации покрышки в данной работе ее не определяют. Методика и порядок выполнения работы На установке производят измерение нормального (радиального) прогиба покрышки.hz при различных нормальных нагрузках Pz и боковое упругое смещение колеса hy, нагруженного постоянной нормальной нагрузкой при разной боковой силе Py. Измерение производят при разном давлении воздуха в покрышке Pn. Работу выполняют в такой последовательности. 1. Установить давление воздуха в покрышкеPn=0,14 МПа. 2. Установите покрышку в положение нулевой нагрузки. 3. Ступенчато меняя нормальную нагрузкуPz в интервале 0…1,0 кН через каждые 200Н фиксируют по шкале нормальный прогиб покрышки hz. Результаты измерений заносятся в табл. 1. Таблица 1 Результаты измерений и расчетов нормальной деформации покрышки Давление воздуха в покрышкеPn, МПа Нормал 0,07 0,10 0,14 ьная Нормал Нормальн Нормал Нормальн Нормальн Нормальна нагрузк ьный ая ьный ая ый я аPz, H прогиб жесткость прогиб жесткость прогибhz, жесткостьC hz, мм Cz, H/м hz, мм Cz, H/м мм z, H/м 4. Установить постоянную нормальную нагрузку на колесо,Pz=2,5 кН. 5. Ступенчато меняя боковую силуРу в интервале 0…500 Н, через каждые 100 Н фиксируют по шкале упругое смещение колеса hy. Результаты измерений заносятся в табл. 2. 6. Повторить сделки в соответствии с пп. 2…5 при давлении воздуха в покрышке 0,07; 0,10; 0,14 МПа. 7. Провести расчеты нормальнойCz и боковой Су жесткости покрышки в соответствии с нагрузками. Полученные значения внести в табл. 1 и 2. Таблица 2 Результаты измерений и расчетов боковой деформации покрышки Давление воздуха в покрышкеPn, МПа 0,07 0,10 0,14 Бокова я Боковое Боковое Боковое Боковая Боковая Боковая силаРу упругое упругое упругое жесткость жесткость жесткость ,Н смещени смещени смещени Су, Н/м Су, Н/м Су, Н/м еhy, м еhy, м еhy, м 8. По результатам измерений и расчетов построить зависимостиhz=f(Pz), hy=f(Py), Cz=f(Pz), Cy=f(Py) при разном давлении воздуха в покрышке. Анализ и выводы Проанализировать влияние на полученные зависимости нормальной нагрузки, боковой силы и давления воздуха в покрышке. Лабораторная работа №5 Определение кинематических зависимостей карданной передачи с асинхронными шарнирами Цель работы:Определить зависимость углов поворота промежуточного и ведомого валов от угла поворота ведущего вала, т.е.𝛼2 = 𝑓(𝛼1 ),𝛼3 = 𝑓(𝛼1 ). Оборудование: 1. Стенд с двухшарнирной карданной передачей (рис. 3). 2. Приборы для измерения линейных размеров. 3. Шкалы для измерения углов поворота ведущего, промежуточного и ведомого валов. Теоретические положения В карданной передаче с одним асинхронным шарниром (рис. 1) зависимость между углами ведомого поворота𝛼2 и ведущего𝛼1 валов имеет видtg𝛼1 = tg𝛼2 cos𝛾где𝛾- угол между ведущим и ведомым валами, зависимость между частотами вращения ведомого𝜔2 и ведущего𝜔1валов cos𝛾 𝜔2 = 𝜔1 sin2 𝛼 +cos2𝛼 cos2 𝛾, (1) 1 1 то есть при равномерной частоте вращения ведущего вала ведомый вращается неравномерно. При этом неравномерность вращения ведомого вала возрастает с увеличением угла между осями валов, соединяющих карданный шарнир. Для обеспечения одинаковых частот вращения ведущего вала и вала агрегата, приводимого карданной передачей, используют передачи с четным количеством шарниров (рис. 2). Ведомый вал будет вращаться с той же частотой, что и ведущий вал 1, если вилки карданных шарниров, установленные на промежуточном валу 2, будут лежать в одной плоскости, углы между осями валов 1 и 2 и 2 и 3 будут одинаковыми, т.е.𝛾1 = 𝛾2 валы карданной передачи будут лежать в одной плоскости. Последовательность выполнения работы 1. В отчете по лабораторной работе начертите таблицу для занесения результатов измерений (табл. 1). 2. Вращая маховичок, опустить ведомый вал в крайнее нижнее положение. 3. Измерить длину𝐿𝛣 промежуточного вала (расстояние между осями шарниров) и расстояние по вертикали между ведущим и ведомым валамиℎ. 4. По формуле: ℎ 𝛾 = arcsin 𝐿 . (2) 𝐵 Вычислить угол между осями валов и результат занести в таблицу 1. Таблица 1 Результаты измерений и расчетов Положение ведомого вала Среднее𝛾2 = ...0 Нижнее 𝛼1 𝛾1 = ...0 𝛼2 𝛼2 − 𝛼1 𝛼3 𝛼3 − 𝛼1 𝛼2 𝛼2 − 𝛼1 𝛼3 𝛼3 − 𝛼1 Верхнее𝛾3 = ...0 𝛼2 𝛼2 − 𝛼1 𝛼3 𝛼3 − 𝛼1 0 20 ... 340 360 5. Вращая ведущий вал с интервалами в200 , фиксировать и заносить в таблицу значения углов поворота промежуточного и ведомого валов. 6. Установить ведомый вал в среднее положение. Выполнить действия, указанные в пп. 3-5. 7. Установите ведомый вал в крайнее верхнее положение. Выполнить действия, указанные в пп. 3-5. Обработка экспериментальных данных 1. Вычислить разницу𝛼2 − 𝛼1 да𝛼3 − 𝛼1 между углами поворота соответственно промежуточного или ведомого валов и углом поворота𝛼1 ведущего вала. Результаты занести в таблицу. Рис. 1. Схема карданной передачи с одним асинхронным шарниром: 1 – ведущий вал; 2 – ведомый вал; α1, α2 – углы поворота соответствующих валов; ω1, ω2 – частоты вращения соответствующих валов. Рис. 2. Схема карданной передачи с двумя асинхронными шарнирами: 1 – ведущий вал; 2 – промежуточный вал; 3 – ведомый вал; α1, α2, α3 – углы поворота соответствующих валов; ω1, ω2, ω3 – частоты вращения соответствующих валов. Рис. 3. Кинематическая схема лабораторной установки: 1 – ведущий вал, 2, 4, 9 – круговые шкалы, 3 – передний карданный вал, 5 – промежуточный вал, 6 – маховичок, 7 – винт, 8 – линейка, 10 – стрелочное устройство, 11 – ведомый вал, 12 – задний карданный вал, 13 – шлицевое соединение. 2. На основании экспериментально определенных данных построить на миллиметровке график зависимости углов поворота промежуточного и ведомого валов от угла поворота ведущего вала. Рис. 4. График зависимости углов поворота промежуточного и ведомого валов от угла поворота ведущего вала. Анализ полученных результатов и выводы 1. Проанализировать полученные результаты и сделать выводы о зависимости: - углов поворота промежуточного и ведомого валов от углов поворота ведущего вала; - амплитуды изменения углов поворота промежуточного вала от угла между ведущим и промежуточным валами. 2. Определить амплитуду и период смены углов поворота промежуточного вала. Сделать выводы и дать рекомендации относительно требований к карданной передаче, которые следует соблюдать в условиях эксплуатации. Лабораторная работа №6 Определение кинематических и силовых параметров рулевого управлениягидроусилителем Цель работы: Закрепить теоретические знания студентов при изучении темы "Рулевое управление автомобиля" и приобрести практические навыки при определении кинематических и силовых параметров рулевого управления автомобиля. Оборудование: Лабораторный стенд, состоящий из рулевого механизма автомобиля ЗИЛ-130, гидроусилителя, рулевого вала с рулевым колесом, сошки руля, продольной рулевой тяги, стрелочного динамометра, манометра, пружины, шкал углов поворота рулевой сошки и рулевого колеса. Теоретические предпосылки Рулевое управление автомобиля предназначено для обеспечения заданной траектории движения автомобиля путем согласованного поворота управляемых колес. В состав рулевого управления автомобиля входит рулевой механизм, рулевой привод и усилитель. На большинстве современных легковых и грузовых автомобилей как малой, так и средней грузоподъемности устанавливаются гидроусилитель рулевого управления. Одним из основных требований к рулевому управлению является удобство и легкость вождения. Удобство управления характеризуется угловым передаточным числом, легкость – силовым передаточным числом. Рулевой механизм автомобиля ЗИЛ-130 состоит из картера, винта с гайкой, на циркулирующих шариках, рейки с зубчатым сектором. Вращение от рулевого вала на винт передается через карданную передачу с передаточным числом, равное единице. Методика выполнения и обработки полученных данных 1. Определение кинематических параметров рулевого механизма автомобиля ЗИЛ – 130 1.1. Определение углового передаточного числа рулевого механизма автомобиля ЗИЛ-130 Угловое передаточное число рулевого механизма – это отношение максимального значения угла поворота рулевого колеса.𝛼Р.К.maxот положения для движения прямо при повороте вправо или влево к соответствующему ему углу поворота рулевой сошки.𝛼𝑃.𝐶.max, и угла поворота рулевого колеса𝛼Р.К.max : 𝛼 𝑈𝜔 = 𝛼𝑃.𝐾.max . (1) 𝑃.𝐶.max Максимальный угол поворота рулевого колеса вправо. Для определения углов поворота рулевой сошки стенд имеет шкалу поворота рулевой сошки с градуировкой через10 от0к400 . При определении фиксируют исходное положение рулевого колеса по положению одной из его шпиц относительно стенда. При этом стрелка, жестко закрепленная на сошке руля, должна быть установлена на шкале против 0. Поворачиваем рулевое колесо вправо на два оборота и записываемзначение угла поворота сошки руля𝛼𝑃.𝐶.max. Угловое передаточное число рулевого механизма: 7200 𝑈𝜔 = 𝛼 .(2) 𝑃.𝐶.max Сравним полученные значения углового передаточного числа с приведенным его значением для автомобиля ЗИЛ – 130. 1.2. Определение характера изменения углового передаточного числа рулевого механизма Характер изменения углового передаточного числа рулевого механизма зависит от назначения и условий эксплуатации автомобиля. Чтобы построить зависимость углового передаточного числа от угла поворота рулевого колеса, необходимо измерить угол поворота рулевой сошки через каждые полоборота рулевого колеса; Полученные данные заносим в таблицу. Таблица 1 Значение углов поворота рулевого колеса и рулевой сошки 𝛼𝑃.𝐾0 180 360 540 720 𝛼𝑃.𝐶.0 𝑈𝜔 По приведенным в таблице данным строим зависимость углового передаточного числа рулевого механизма от угла поворота рулевого колеса и производим ее анализ. 2. Определение силовых параметров рулевого управления автомобиля ЗИЛ – 130 с гидравлическим усилителем 2.1. Определение усилия на рулевом колесе Усилие на рулевом колесе определяем для двух случаев – при неработающем и работающем усилителе. Усилие определяем с помощью упругого динамометра. Сопротивление повороту управляемых колес автомобиля на стенде имитируется пружиной, соединяемой одним концом через стрелочный динамометр с кронштейном рамы, а вторым – с продольной рулевой тягой. Через упругий динамометр прикладываем силу к рулевому валу 1 кН, при этом фиксируется сила вторым упругим динамометром в продольной рулевой тяге. 2.2. Определение коэффициента усиления гидравлического усилителя рулевого управления Коэффициент усиления𝐾П - это отношение силы на рулевом колесе при неработающем усилителеРР.К.1 к силе на рулевом колесе при работающем усилителеРР.К.2 : Р КП = РР.К.1. (3) Р.К.2 СилыРР.К.1 иРР.К.2 должны быть замерены при показании стрелочного динамометра в 1 кН. Работа усилителя оценивается показателями эффективности, реактивного действия, чувствительности. Показатель эффективности𝐸– это отношение момента на рулевом колесе при повороте автомобиля без усилителя.𝑀𝑃 к аналогичному моменту с усилителем𝑀РП : М Е = М Р . (4) РП При отсутствии усилителяЕ = 1. Показатель реактивного действия определяется как отношение изменения моментов: dM 𝜌 = РП . (5) dM𝑃 Он оценивает степень силового следящего действия усилителя. При отсутствии реактивных элементов в усилителе𝜌 = 0, то есть момент рулевого колеса не зависит от момента сопротивления управляемых колес автомобиля. Для усилителей с реактивными элементами𝜌 = 0,1.....0,3, чувствительность усилителя оценивается углом поворота рулевого колеса, при котором усилитель включается в работу. По требованиям прежнего стандарта СЭВ 1629-79 момент на рулевом валу не должен превышать 8 Н∙м для включения гидроусилителя в работу, угол поворота рулевого колеса не должен превышать6,50 при повышении давления на 0,1 МПа. При выполнении лабораторной работы проверить соответствие гидроусилителя требованиям стандарта. Лабораторная работа №7 Определение эффективности рабочей тормозной системы автомобиля Цель работы: Экспериментальное определение тормозных свойств автомобиля и их показатели. Оборудование: автомобиль (рабочий), датчики скорости, датчики пройденного пути, датчики срабатывания тормозного привода и механизма, устройство записи диаграмм. Задачи работы: получить экспериментальные данные для определения тормозного пути и суммарного времени торможения. Теоретические положения Система торможения предназначена для уменьшения скорости движения, сохранения управляемой траектории движения, остановки и удержания автомобиля на месте. Различают следующие тормозные системы автомобиля: рабочая, вспомогательная, аварийная (запасная), стояночная. Под эффективностью торможения каждой из названных систем принимается качественная мера торможения, характеризующая свойство тормозной системы создавать необходимое сопротивление движению автомобиля. С количественной стороны свойство данной тормозной системы автомобиля достигать требуемого тормозного момента оценивается по нормированным показателям и критериям (ОСТ 37.001.067-86). Тормозной путь и постоянное замедление обусловливают эффективность рабочей тормозной системы всего подвижного состава транспорта. Для прицепов и полуприцепов определяют значение суммарной тормозной силы и времени срабатывания тормозов. Тормозной путь определяется как расстояние, которое проходит автомобиль от начала до конца торможения. Начало торможения – это момент времени, в течение которого тормозная система получает сигнал о необходимости торможения, а конец торможения – это момент времени, когда автомобиль полностью останавливается. На рис. 1. показано изменение силы давления на педаль Рпед, тормозной силы Рг, замедление (отрицательное ускорение) J и скорость движения автомобиля V в зависимости от времени t при торможении до полной остановки. Ко времени Т с момента, когда водитель оценив дорожную ситуацию (аварийно-опасная ситуация, сигнал светофора, значение дорожного знака), сделал вывод о необходимости торможения до полной остановки автомобиля. - время реакции водителя tр; - интервал времени до начала торможения – tс; - интервал времени до момента, когда тормозная сила имеет постоянное значение – tн; - время срабатывания тормозного привода и механизма (tс+tн); - время устойчивого торможения – tст, что соответствует постоянному замедлению. При исследовании установившееся замедление j принимают равным среднему значению замедления за время постоянного торможения tст. Рис. 1. График процесса торможения. Тормозной путь и постоянное замедление при действии рабочей тормозной системы определяют испытанием автомобиля. При этом предусмотрены испытания типа 0, 1, 2 согласно ГОСТ 22895-77. Испытание "ноль" проводят с "холодными" тормозными механизмами. При испытании "ноль" торможение производят порознь: с двигателем соединенным с трансмиссией и разъединенным с трансмиссией. Испытание "1" производят при нагретых тормозных механизмах, а испытание "2" - при движении автомобиля на затяжных спусках. Испытание всех трех типов проводят при контрольном, то есть экстренном торможении, в заданном режиме, когда приведение в действие органов управления рабочей тормозной системы производится от заданной начальной скорости за время не более 0,2 сек., с усилием согласно ГОСТ 22895-77. При обучающих испытаниях тормозных свойств автомобиля начальная скорость торможения ограничивается 30км/час. по соображениям сохранности. Контрольное экстренное торможение заменяют служебным торможением с замедлением 1,5...2,5 м/с2. Дорожные испытания тормозных свойств автомобиля производят по типу "ноль" с отсоединенным от трансмиссии двигателем. Тормозные свойства оценивают по длине тормозного пути и времени торможения. Последовательность выполнения работы 1. Выехать на размеренный участок дороги, остановить автомобиль, настроить аппаратуру, установить в исходные положения стрелки электроимпульсных счетчиков. 2. Записать диаграмму процесса торможения автомобиля: а) разогнать автомобиль до скорости 33...35 км/ч. и отсоединить двигатель от трансмиссии; б) при достижении скорости 30 км/ч. включить записывающее устройство и через 3...4сек. затормозить автомобиль; в) через 2...3сек. после остановки автомобиля выключить записывающее устройство; г) подсчитать количество отметок датчика пройденного пути ns и путь ls за каждую секунду и занести в таблицу 1; Таблица 1. Результаты обработки диаграммы процесса торможения автомобиля. Количество отметок Путь пройден Скорость датчика пройденного Время автомобилем ST, м соответствен пути начала но времени торможения за за торможения с начала с начала tT, ceк каждую кажду V, м/с торможения торможения 1сек. ю 1сек. 0 1 2 3 ... д) определить по формуле путь ST; ST за каждую секунду и от начала торможения результаты занести в табл. 1; е) по полученным данным построить зависимость ST=f(V). 3. По показаниям счетчиков определяют суммарный тормозной путь и суммарное время торможения. Приближенный вид графиков зависимостей показан на рис. 2 и рис. 3. Рис. 2. График зависимости времени торможения от скорости движения Рис. 3. График зависимости тормозного пути от скорости движения Анализ и выводы показателям оценивают тормозную 1. По каким эффективность автомобиля? 2. Чем объясняется опоздание срабатывания тормозного привода? 3. Проанализировать графики зависимостей торможения. Лабораторная работа №8 Определение топливной характеристики автомобиля Цель работы:Усвоить методику определения расхода топлива в зависимости от скорости при установившемся движении на выбранной передаче. Оборудование:автомобиль "Газель" (рабочий), расходомер топлива, устройство измерения пройденного пути, электронный тахометр. Теоретические предпосылки Топливная экономичность автомобиля характеризуется расходом топлива отнесенным к пройденному пути, либо к транспортной работе в тоннокилометрах, либо пассажиро-километрах, произведенным при перевозке грузов и пассажиров. Расход топлива на единицу пробега автомобиля: 𝑄 geNe 𝑄 = 𝑉𝑡 = 𝑉 , (1) где𝑄𝑡 - расход топлива за единицу времени, г/ч; ge- удельный расход топлива, г/кВтч; Ne- мощность двигателя, кВт.; 𝑉 - скорость автомобиля, км/ч. Расход топлива𝑄𝑠 в литрах на 100км пробега можно определить с учетом плотности топлива𝛾, г/см3. geNe 𝑄𝑠 = 10𝑉𝛾. (2) Из мощного баланса известно, что: 𝑁 +𝑁𝑤 +𝑁𝑖 Ne = 𝜓 𝜂 , (3) где𝑁𝜓 ,𝑁𝑤 - мощность, затрачиваемая на преодоление сопротивления дороги и сопротивление воздуха; 𝑁𝑖 - мощность, затрачиваемая на разгон автомобиля. Для устойчивого режима движения𝑁𝑖 = 0, тогда: 𝑁 +𝑁𝑤 Ne = 𝜓 𝜂 , (4) 𝑄𝑠 = ge(𝑁𝜓 +𝑁𝑤 ) 10𝑉γη . (5) С учетом что: 𝑁𝜓 = 𝜓GV3 3.6⋅103 kFV3 , кВт. (6) 𝑁𝑤 = 3.6⋅103, кВт., (7) где𝜓– коэффициент суммарного сопротивления дороги; 𝐺 - вес автомобиля, Н; 𝐹 - лобная площадь автомобиля, м2; Н⋅с2 𝑘– коэффициент сопротивления воздуха, м4 . Формулу для определения расхода топлива на 100км пробега можно записать в виде л/100км: kFV2 ) 3.62 4 ge(𝐺𝜓+ . (8) Анализ выражения показывает, что на расход топлива наибольшее влияние оказывают: экономичность двигателя, изменяющаяся в широких границах в зависимости от температурного, скоростного, погрузочного режима двигателя и его технического состояния; конструктивные параметры автомобиля (его вес, потери трения в трансмиссии, фактор обтекаемости, площадь лобового сопротивления); эксплуатационные погрузки и дорожные условия (наклон дороги, сопротивление качению колес); скоростной режим движения автомобиля. Расход топлива зависит также от квалификации водителя, приемов вождения (выбор скоростного режима двигателя, выбранной передачи, технике переключения передач, использования наката и динамического преодоления подъемов дороги). Топливная характеристика автомобиля (рис. 1) показывает зависимость расхода топлива𝑄𝑠 от скорости устойчивого движения автомобиля𝑉по дорогам с разными коэффициентами суммарного сопротивления дороги𝜓. Такая характеристика может быть построена для каждой передачи путем расчета или по результатам стендовых и дорожных испытаний автомобиля. 𝑄𝑠 = 3.6⋅10 ⋅𝛾⋅𝜂 Рис. 1. Топливная характеристика автомобиля для разных коэффициентов сопротивления дороги:𝜓4 > 𝜓3 > 𝜓2 > 𝜓1 . Для обучающих целей, испытания проводят для одного значения передачи на горизонтальном участке и одного значения коэффициента сопротивления дороги. Методика и порядок выполнения работы Испытания автомобиля на топливную экономичность производят на выбранной передаче в режиме устойчивого движения. Заезды на участке испытания начинают со скорости 50 км/ч. По окончании опыта записывают полученные показания приборов, затем их выключают и снижают скорость до следующего заданного значения. Измерения производят для устойчивого движения со скоростью 40, 30, 20км/час. По результатам замеров расход топлива в прямом и обратном направлениях определяют его среднее значение. Задание рекомендуется выполнять в следующей последовательности: 1. При заезде на горизонтальный участок дороги остановить автомобиль и настроить измерительные приборы. 2. Разогнать автомобиль до скорости 50 км/ч. и строго ее держать. 3. По команде руководителя, включить приборы для измерения расхода топлива и пройденного пути. 4. Через 0,3…0,5 км пробега выключить приборы. Результаты замеров внести в табл. 1. Таблица 1. Результаты замеров и расчетов опробования автомобиля на топливную экономичность. Измеряемые Расчетные параметры параметры Скорость движения автомобиля Количество импульсов пройденного пути ns Пройденный путь𝑆, км. Объем расхода топлива𝑄, мл Расход топлива на 100 км пути𝑄𝑠 , л/100 км. Прямое Прямое Прямое Прямое Обратное Обратное Обратное Обратное движен движен движен движени движение движение движение движение ие ие ие е Среднее значение расхода топлива 𝑄𝑠 .cep. , л/100 км. 50 40 30 20 5. Повторить операции в соответствии с пп..2-4 для скоростей движения 40, 30, 20 км/ч. (в прямом и обратном направлениях). 6. По полученным результатам рассчитать пройденный путь𝑆, объем расхода топлива𝑄, расход топлива на 100км пути𝑄𝑠 , а также среднее значение𝑄𝑠 .cep.. Полученные результаты внести в табл. 1. 7. По данным табл. 1 построить зависимость среднего значения расхода топлива в литрах на 100 км. пройденного пути от скорости устойчивого движения𝑄𝑠 .cep. = 𝑓(𝑉). Приблизительный вид графика показан на рис. 2. Рис. 2. Топливная характеристика устойчивого движения автомобиля. Анализ и выводы 1. Проанализировать по полученной зависимости, как с изменением скорости движения изменяется расход топлива. 2. При какой скорости расход топлива будет минимальным. 3. Какие факторы влияют на топливную экономичность автомобиля? СПИСОКИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Основенко М.Ю., Сахно В.П. Автомобили. – К.: НМКПО. 1992. 2.Кисликов В.Ф. Лущик В.В. Устройство и эксплуатация автомобилей. Учебник. –К.: Лыбидь, 1999. – 400 с. 3. Сахно В.П., Безбородов Г.Б., Маяк М.М., Шарай С.М. Автомобили: Тягово-скоростные свойства и топливная экономичность. /Учеб. пособие/. – К.: Изд-во. "КОВИЦ", 2004. – 174с. 4. Гришкевич А.И. Автомобили. Теория – Минск, Выс. школа. 1986. 5. Иларионов В.А. Эксплуатационные характеристики автомобилей. – М., Машиностроение, 1966.-278с. 6. Устройство и эксплуатация автомобилей. Учебное пособие/В.П. Полосков, П.М. Лещев, В.Н. Хартанович/. –М.: ДОСААФ, 1983. – 318 с. 7. Техническая эксплуатация автомобилей. Несвитский Я.И. «Высшая школа», 1971. – 428 с. 8. НИИАТ. Краткий автомобильный справочник. Изд. 10-е. – М.: Транспорт, 1984. – 224с. 9. Работа автомобильной шины/Под ред. В.И. Кнороз. – М.: Транспорт, 1976. – 238с. 10. Теория эксплуатационных свойств автотранспортных средств в примерах и заданиях: Учеб. пособ. / Н.П. Алекса, В.Н. Алексеенко, А.Б. Белая Церковь. – М.: УМК ПО, 1990. – 100с.