ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ
(с лабораторными работами)
Под ред. доктора техн. наук
В.Н.МАЛИНОВСКОГО
Допущено Минисrсрством высшРrо и rrеднс~о
с11е1н�альнuгu uбра"uв,шня CCC\J u �.ачест�;е учеб­
НИl\'а для средних спеuиальных учебных заведе1-11,й
1оЭ
MOCl(BA Э Н Е Р ГО И 3 ДАТ 1982
ББI( Зt.221
Э 45
УДК 621.317
Рецензенты: Л. П. Любимова и Б. П. Хромой
А втор ы: Р. М. Демидова-Панферова, Б. Н. Малиновский,
В. С. Попов, В. Ф. Семенов, К. Н. Цепляев
Электрические измерения (с лабораторными раЭ45 ботами): Учебник для техникумов/Р. М. Демидова­
Панферова, В. Н. Малиновский, В. С. Попов и др.;
Под ред. В. Н. Малиновс1<0rо. - М.: Энерrоиздат,
1982. - 392 с., ил.
В пер.: 90 к.
Изложены основы теорюr электрических измерениi!. Рассмотрены
методы и средства яэмереннn элсктрнческнх, маr·нитиых н иеэлеn.rри•
t.Jескнх вс.ли,шн. Приведены лабораторные работы по э11ектрнческ11м
11змеретшм. Учебшrк на1111са11 в соответстви.н с ново!! учебной програ\1•
мoll по д<>111юму курсу
Предназ11ачен д.ття учащ11хся энергетических и электромехзш,чес­
ких техн11Кумов неприборостроите.тrьных спец.11а11ьностей. Может быть
полезен ниженерно�техн нческим работникам.
Э
2302010000-259
150-82
051(01)-82
ББК 31.221
БП2.1.083
ПРЕДИСЛОВИЕ
Настоящая книга является учебником no электриче­
ским измерениям для учащихся энергетических и э.r�.ект­
ромеханичес1,их
техникумов неприборостроите.пьных
специальностей. В ней изложены основы теори11 эле1п­
рических измерений, методы измерений эле1,трических,
магнитных и неэлектрических величин, а также рассмот­
рены 1ехннческ11е средства, применяемые nри эле1,три­
ческих измерениях.
Используемая до настоящего времени в 1,ачестве
учебника для техникумов книга В. С. Полова «Электри­
'lеские измерения» бь1ла издана в 1974 r. и для своего
времени достаточно хорошо отражала положение в об­
ласти .эJ1е1прических измерений. ·Однако с тех пор про­
изошли существенные изменения в об.'Jастн теории и
праl(тики эле1,трических из.мерений. Это нашло отраже­
ние и в новой программе курса «Электрические изме­
рения».
Предлагаемая вюн-1анию читателей 1шиr·а написана
в соотве1с1вии с новой программой курса. В ней отра­
}1,ены достижения совремеююй нау1ш в области э.пект­
рических из:1-1€:реаий. Большое вни1;1ан11е уделено новым
прогрессивным
средствам из,rерения - э.1ектронным
приборам, как цифровым, та�, и аналоговым, аналого­
цифровым преобразователям, инфор1v1а:.1Ионно-измери­
тсльным системам. В книге приводятся техн�1ческие
характеристи1<И новых освоенных промышленностью
средств из,1ерений. При И3Jюжении материала авторы
опирались на новые ГОСТ в метрологии и измеритель­
ной технике. По сравнению с I(нигой В. С. Попова со­
I<рашен материал, посвященный описанию элею--ромеха­
ннчесl(их приборов. Книга соцержит описание ряда но­
вых лабораторных работ.
Данная книга представляет собой труд преподава­
тельс1<0rо ко.r�ле1<тива 1,афедры информационно-измери1*
3
тельной техниI<и Московс1<оrо ордена Ленина и ордена
Октябрьс1<0й Революции энергетичес1юrо мнститута.
В пей использован многолетний педагогичес1шй опыт
авторов.
Степень участия авторов в написании отдельных
глав и параграфов книги (перечислены в алфавитном
порядке): Р. М. Демидова-Панферова - гл. 5, кроме
§ 5.9, 5.10, и гл. 15, В. Н. Малиновский - предисловие,
введение, гл. 6, 9, 11 и 17, В. С. Попов - гл. 1-3, 10, 16
и § 5.9, 5.10, В. Ф. Семенов-гл. 8, 14, К. Н. Цепля­
ев - гл. 4, 7, 12, 13.
Авторы глубоко признательны рецензентам зав. ка­
федрой Мос1<0вс1юго эле1протехническоrо института
связи доктору техн. наук, проф. Б. П. Хромому и стар­
шему преподавателю Всесоюзного заочного электромеха­
нического техникума Л. П. Любимово й за полезные со­
веты и замечания, а также выражают благодарность
старшему преподавателю А. А. Мо.жейко за большую
работу по реда�<тированию 1<ниги.
Авторы с блаrодарностыо примут все 1<ритические
замечания и пожелания. Их следует направ.ттять по ад­
ресу: 113114, Мос1ша, М-114, Шлюзовая паб., 10. Энер­
rоиздат.
Авторы
ВВЕДЕНИЕ
Развитие науки и техшши всегда было тесно связа•
но с прогрессом в области измерений. В физ1ше, меха­
нике и других науках именно измерения позволили точ­
но устанавливать зависимости, выражающие объектив­
ные законы природы, поэтому эти науки именуются
точными. Важное значение измерений для науки под­
•rеркивали многие ученые. Вот что они писали
об этом': Г. Галилей: «Измеряй все доступное изме­
рению и делай доступным все недоступное ему»;
Д. И. Менделеев: «Наука начинается с тех пор, 1<а1< на­
чинают измерять, точная наука немыслима без меры>>;
Кельвин: «Каждая вещь известна лишь в той степени,
в какой ее можно измерить».
Измерения являются одним из осноuных способов
познания природы, ее явлений и законов. Каждому но­
вому открытию в области естественных и техничес1шх
наук предшествует большое 1шсло разли 11ных измерений.
Немецкий физик Г. Ом установил основной закон эле1<­
тричесI<ой цепи (закон Ома) в 1826 г. путем ряда точ­
ных экспериментов, а в 1827 г. дал ему теоретическое
обоснование. П. Н. Лебедев, построив специальное из­
мерительное устройство, в 1901 г. впервые обнаружил
и измерил давление света на твердое тело. ТаI<ие приме•
ры можно было бы продолжить.
Важную роль играют измерения и в создании новых
машин, сооружений, повышении качества проду1щии и
эффеI<тивности производства. Например, во время стен·
довых испытаний крупнейшего в мире турбогенератора
мощностью 1200 МВт, созданного на ленинградском
объединении «Электросила», измерения производились
в 1500 различных его точках.
1 П. П. Орнатс1пrй. Теоретические основы информационно-изме­
рительной техники. - l(иев.: Висща ш1юла, 1976, с. 7.
5
Проб.ттема повышения качества продукции 11 эффе1,­
тивности производства решается путем автоматнзацни
технологических процессов, и здесь успех дела во мно­
гом определяется достоверностью и своевременностью
получения измерительной информаnии о ходе техноло­
гического процесса. Качество многих технологических
процессов зависит от состояния электроустановок, об­
служивающих эти процессы. Каждая электроустановка
должна удовлетворять определенным техническнм тре­
бованиям. Проверка выполнення указанных требований
nропзводится посредством эле1<троизмерительных при. боров. Эта проверка осуществляется на всех стадиях
создания, монтажа и последующей эксплуатации эле1п­
роустанов1ш.
Первоначально под электрическими измерениями
понималнсь методы и средства измерений параметров,
связанных с производством, передачей и использовани­
ем электричес1юй энергии. Позднее электричес1<ие изме­
рения стали применяться в целях получения измеритель­
ной инфор�1ации о протекании различных регулируемых
_или управляемых технологических процессов. В насто я­
ще время электрические методы измерений могут при•
меняться для изучения практичес1ш любых физических
вели<rин или процессов.
Первый в мире электроизмерительный прибор «у1<азатель электрической силы» был создан в 1745 r.
ю<ад. Г. В. Рихманом, сорат1пшом М. В. Ломоносова.
Это был электрометр - прибор для измерения разности
потенциалов, и предназначался он для изучения атмо­
сферного электричества. Однако толы<а со второй поло·
вины XIX в. в связи с созданием и пра�<тичесJ<им приме­
нением генераторов электрической энергии остро встал
вопрос о разработJ<е различных электроизмерительных
приборов, отсутствие которых сдерживало развитие
эле1<тротехники.
Много сделал для развитня эле1<троизмерителыюй
техники во второй половине XIX и в начале ХХ вв. вы­
дающийся русский эле1<тротехниI< М. О. Доливо-Добро­
вольский. Им разработаны амперметр и вольтметр элек·
тромагнитной системы, изготовлен индукционный изме­
рительный механизм с вращающимся магнитным полем
и подвижно й частью в виде дис1<а, который был затем
ттоложен в основу ваттметра и фазометра, разработаны
ре1<0.мемации по конструированию ферродинамичес1шх
6
приборов и т. д. Однаl{О из-за НИJl{ОГО уровня развития
электротехнической промышленности в дореволюцион­
ной Росс1ш работы М. О. Доливо-Добровольского полу­
чию1 первое применение дJ1я организации пrоизводства
э:1ектроизмерительных приборов за рубежом, в частно­
сти на одной нз не:\1ецких фнрм.
I( тому же периоду относятся работы известного
русского физика А. Г. Столетова, открывшего заl{он из­
менения магнитной проницаемости в зависимости от на­
пряжешюсти ПОJJЯ и предложившего метол. определения
хара1<теристик магнитных материа.пов с помощью баJ1листичесl{ОГО гальванометра.
Важную роль в разnитии электроизмерителыюй тех­
н111ш примерно в те же годы сыграли труды акад.
Б. С. Якоби. Им разработан ряд приборов для измере­
ния сопротивления электричес1юй пени, сдеJ1аны первые
шаги в обJJасти обеспечения единства в измерении эле1<­
тричес1шх величин. Дело в том, что к 1880 r. на практи­
ке использова.r1ось 15 различных единиц элеюричеСl{Оrо
сопротивления, 8 единиц ЭДС, 5 единиц электри<rеского
TOl{a. Такое положение сильно затрудняло сопоставле­
ние результатов расчетов и измерений, выполненных
различными исследователями. Остро ощущалась необ­
ходю.10сть введения единой системы электричесl{ИХ еди­
ниц. Такая система была принята Первым l{Онrрессом
по элеl{тричеству, состоявшимся в 1881 r.
Особенно много для развития измерительной техни1ш в России сделал разносторонний ученый Д. И. Мен­
делеев. Им создана точная теория весов, по его настон­
нию и при аl{тивном участии в России с 1899 r. бьша
допущена факуJ1ьтативно метрическая система мер,
1юторая с 1918 r. стала обязательной, по его инициати­
ве в конце прошлого и начале нынешнего веl{а при
Главной палате мер и весов в Петербурге было орган!•­
зовано специальное отде.1ение для проверки электриче­
ских измерительных приборов. Однако шнро1юе разви­
тие электроизмерительная техника в нашей стране по­
лучила только в годы Советской власти.
В 1927 г. в Ленинграде построен первый отечествен­
ный элекrроприборостроительный завод «Электропри­
бор» (ныне завод «Вибратор»). Уже через год завод
выпустил около 100 ООО счетчиков электричес1юй энер­
гии, в которых остро нуждалось народное хозяйство
страны (для сравнения укажем, что в настоящее время
7
отечественные заводы ежегодно выпус1<ают Оl(оло 5 млн.
счетчи!{ОВ).
В 30-х годах были введены в строй приборострои­
тельные заводы в Харькове, Ленинграде, Москве, Кра�­
нодаре, Киеве. В послевоенный период с 1948 no 1967 r.
объем проду1щии электроприборостроения возрос в
200 раз. В последующих пятилетl(ах развитие приборо­
строения идет неизменно опережающими темпами. Рас­
ширяется l(Оличество видов измеряемых величин, непре­
рывно уJiу 1rшаются метрологические характеристики
средств измерения, их внешний вид.
Прогресс в развитии средств электроизмерительной
техники в последние годы был обеспечен в результате
дальнейшего развития теории измерений и разработки
на ее основе новых методов измерения, широкого при­
менения в констру1щиях средств измерений последних
достижений мю<роэлектроникu, автоматшш, вычисли­
тельной техники, а та!{Же успешного решения ряда тех­
нологических задач. Рассмотрим основные достижения
в этой области.
Аналогоnые приборы непосредственной оценки вы­
пус1<аются промышленностью уже десятки лет. Между
тем в последние годы в их констру1щии были сделаны
серьезные изменения: так, от опор на l(ернах перешли
к растяжкам, что позволило существенно повысить точ­
ность, снизить цену де.r�ения, а в ряде случаев изменить
весь внешний вид прибора. До последнего времени та1юму переходу препятствовали серьезные технические
трудности (недостаточная прочность и упругое после­
действие растяже1<). Однако в результате усилий уче­
ных эти препятствия были устранены, а приборострои­
те.r�ьная промышленность СССР освоила производство
ряда серий аналоговых приборов (амперметров, вольт­
метров, ваттметров, частотомеров, фазометров и др.)
с высокими технико-экономическими характеристиками.
В 1<ачестве примера можно у1сазать на разработку узко­
профильных ( 120ХЗО и lбОХЗО мм по лицевой панели)
аналоговых сигнализирующих 1юпта�стных (АСК) при­
боров. Приборы этой серии об.r�адают рядом достоинств:
они занимают на щитах и пультах управления в 510 раз меньше места, чем приборы аналогичного назна­
чения в обычном исполнеюш; отличаются высоким
классом точности 0,5 и 1,0; снабжены устро:i'Iствами, по­
зво.r�яющими производить не только измерение, но и
8
1<онтроль, а таюке регулирование контролируемой вели­
чины. Аналоговые сигнализирующие контактные прибо­
ры выпус1<аются серийно и успешно используются в
промышленности, в частности для контроля за работой
агрегатов котел - турбина - генератор на современных
электростанциях. Колле1<тиву авторов, разработавших
эти рриборы, присуждена Государственная премия
1977 r.
На основе микроэле1<тронюш создан ряд моделей
аналоговых приборов непосредственной оцеюш без по­
движных частей.
Важным шагом в развитии электроприборостроения
явились разработ1<а и освоение серийного производства
новых методов изготовления резисторов на основе пе­
чатной технологии и литого микропровода в сплошной
стеклянной изоляции, отличающихся компактностью и
высокой стабильностью сопротивления.
Технология производства печатных резисторов была
предложена и освоена на Краснодар�ком заводе изме­
рительных приборов. На основе пе,1атных резисторов
разработаны и выпускаются серийно многие модеди пре­
цизионных полуавтоматических 1юмпенсаторов (типа
Р345, Р363), мостов, делителей напряжения (типа РЗ 13,
Р35), полуавтоматичеСl{ИХ установок (типа У355, У309,
УЗlЗ), погрешность их не превышает 0,005-0,0005%.
В результате разработки технологии производства
литого микропровода в сплошной стеклянной изоляции
была решена проблема производства высокоомных ре­
зисторов и приборов на их основе.
Новым шагом в развитии эле1<троизмерительной
техники стали разработка и освоение серийного произ­
водства цифровых измерительных приборов (ЦИП). Вы­
сокая точность, быстродействие, помехоустойчивость,
. малый отбор мощности от объекта измерения, удобство
визуального отсчета, возможность выдачи результата
измерения в виде кода во внешние устройства и ряд
других ценны х признаков характерны длн ЦИП наряду
с полной автоматизацией процесса измерения. При раз­
работке ЦИП сочетаются последние достижения теории
электрических измерений с современной микроэлектрон­
ной элементной базой, автоматююй и вычислительной
техншюй.
В настоящее время наметилась определенная тен­
денция к применению в электроизмерительных приборах
9
микропроцессоров. Последние позволяют производить
обработку результатов измерения путем умножения или
деления измеряемой величины на постоянный 1юэффи­
циент, вычитания постоянного коэффициента из значения
измеряемой величины, контроля зна 11е1-шя измеряемQй
величины относительно заданных границ зоны допуска,
вы<шслення статистических характеристи1< контролиру­
емого процесса, J1инеаризации характеристик измери1ельных преобразователей и т. д. Микропроцессоры
также 01<азывают активное воздействие на сам процесс
измерения- и калибровю1 прибора.
Наукой об измерениях, методах II средствах обеспе­
чения их единства, способах достижения требуемой точ­
ности является метроJюrия. Но наличие хороших мето­
дов и средств измерений еще не означает высокого
уровня измерений, необходимо также правильно поль­
зоваться ими. Поэтому в метрологии можно выделить
два направления - научно-техническое и законодатель­
ное. Содержанием научно-технического направления яв­
ляется создание, например, эталонов, средств и методов
измерений, методов оценки точности измерений и зако­
нодате:1ьноrо - создание реrламент1Iрованных государ­
ством общих правил, требований и норм, обеспечиваю­
щих высою1й уровень измерительного дела на строго
научной основе.
Наука о принnипах и методах установления наибо­
.пее эффективных норм и правил взаимодействия эле­
ментов общественного производства с точки зрения их
совместимости, унификации и рациональной организа­
ции называется стандартизацией. Стандарты - это тех­
нические законы, устанавлиnающие определенные тре­
бования 1< материалам, изделиям, технологическим
процессам, техничес1юй и технолоrичес1юй документа·
ции, методам испытаний и т. п. Метрология и стандар­
тизация тесно связаны между собой: с одной стороны
измерения пронизаны различными стандартами (напри­
мер, на средства, методшш), с другой стороны, измере­
ния обеспечивают методы и средства l(ОНтроля выпол­
нения стандартов. Поэтому в Советском Союзе стандар­
тизация и метрология объединены в единой государст­
венной службе - Государственном комитете стандартов
Совета 1Vl�инистров СССР (Госстандарт СССР).
В нашей стране измерениями профессионально зани­
маются бoJree трех миллионов трудящихся; ими еже10
дневно выполняется боJ1ее 20 МJ1рд. измерений. Много
времени затрачив&ется на проведение из,1ерений р�бот­
ника'v1И пау1ш, nромышленнос1и, торговли, транспорта
и т. д. В э1<сnлуаrации находится 01<оло I МJ1рд. прибо­
ров. В таких условиях необходимо обеспечить единство
1вмерений в стране - это важнейшая задача метро.по­
rической службы Единство,1 иЗJ\1ерений называется
такое положение в области измЕ>реннй, при 1<отором их
r,езуJJьтаты выражены в узаJ<оненных единицах, а по­
грешности известны с зада1�ной вероятностью. Единство
Рзмерений достигается единством эталонов и мер; испы­
таний, поверки и ревизии, �'етрологпсrссl(Их характерис­
тик средств измерений; методов измерительных процес­
сов; форм представления резу.r�ьтатов измерения За1ю­
нодателъной основой в этом отношении является система
Государственных общесоюзных стандартов (ГОСТ) в
виде Государственной системы обеспе,1ения единства из­
мерений (ГСИ).
Задача данной 1шиrи - позна1<омить читате 1я с ос­
новными понятиями метрологии и электроизмср11тельной
техники, принципом действия и основными хараюерис­
тиками современных средств из"1ерения II методами из­
мерения электричесl\ил, магнитных и неэле1прио.J.еских
величпн.
ГЛАВА ПЕРВАЯ
ОСНОВНЫЕ МЕТРОЛОГИЧЕСКИЕ ПОНЯТИЯ.
МЕТОДЫ ИЗМЕРЕНИй И ПОГРЕШНОСТИ
1.1. ОПРЕДЕЛЕНИЕ И l(ЛАССИФИКАЦИЯ ИЗМЕРЕНИИ,
МЕТОДОВ И СРЕДСТВ ИЗМЕРЕНИИ.
ЕДИНИЦЫ ФИЗИЧЕСКИХ ВЕЛИЧИН
Наука об измерениях, методах и средствах обеспе­
чения их единства и достижения требуемой точности на­
зывается .метрологией.
Из.мереиаем называется нахождение значений физи­
ческих веJ1ичин опытныrv� путем с помощью специальных
технических средств.
Измерения доJJжны выпоJшяться в общепринятых
единицах.
В СССР в 1963 г. введена Международная система
единиц (СИ). Основными единицами СИ явJ1яются:
метр (м), 1<илограмм (кг), секунда (с), ампер (А),
кельвин (К) и 1<андела (кд). Кроме основных единиц
установлены производные единицы. В табл. i. l приве­
дены наиболее употребительные производные единицы
электрических и магнитных величин.
Нанмеиования 1<раrиых и до11ьных единиц образуются путем применения приставок, приведенных в
табл. 1.2.
Средствами электрических измерений называют тех­
нические средства, используемые при электрических из­
мер ениях и имеющие нормированные погрешности. Раз­
Jiичают следующие виды средств электричесI{ИХ измере­
ний: 1) меры; 2) эJiектроизмерительиые приборы; 3) из­
мерительные преобразователи; 4) электроизмеритель­
ные установки; 5) измерительные информационные сис­
темы.
Мерой называется средство измерений, предназна12
ченное для воспроизведения физической величины за"
данного размера, например измерительная катуш1<а со­
противления, конденсатор, гиря. Набор мер представля­
ет собой спеuиально подобранный комплект мер для
воспроизведения ряда одноименных величин различного
размера. Примерами набора мер являются магазины
сопротивлений, ем1_юстей и т. д.
Таблиц а 1.1. rlро11зводные единицы электрических и мапIит11ых
вели•1и11
Обозиаченне
.,::f
ВеJ1,1чн11з
"'
о
:,:
,:
5..:
t)
<.)
;,,,
щ
Q.
Работа, э11ергия, количество ТСПJIОТЫ д жоу;rь Дж
ватт
Вт
Количество электричества
Кл
ку;юн
Электрическое 11апрs1же11ие, разность воль т
в
поте1щиалов, ЭДС
Напрs�женность электрнческоrо поля ВОJJЬТ 8/м
1ш метр
Электрическое сопротивление
ом
Ом
фарада
ф
Электрическаs� емкость
Бб
вебер
Поток магнитной иuдукции
Индуктивност1, и взаимная индукГн
ret1pи
тивность
тесла
Т.1
Магнитная инду1шия
aimep А/м
Напряженность магнитного поля
на метр
ампер
А
Магнитодвижущая сила
Частота
Гп
герц
MOIЦt!OCTb
"'
•о
1&
"'"'
;,,,�
:s:::
J
\V
с
V
•:,:
о .
О) :raJQ)
='
:в
;., �!:: :.s;t t
..: s!
� t:t
�
'i[!�Я
�C::c.iA:J
Н-м
Дж/с
А•с
Вт/А
V/rn
-
Q
F
\1/Ь
II
В/А
Кн/В
Б·с
т
А/ш
А
Hz
В6/А
-1
Вб/м2
с-
Т аблиц а 1.2. rlристав1ш к единицам
Приставка
Пико
Нано
Микро
Мнллн
Саити
Деци
:,:о
ci,):=
:,::i:
Q.I g](J
:3 о :f
���
..,о�
0.:и
10-12
10-9
1�
1о-;1
10-2
10-1
Обознэченне
м�ж,цурусское 1 народкое
п
н
мк
р
с
с
d
м
д
п
µ
т
Прн ставка
с,;:,:
:,:
о
:,:,:
CJ .,.,
3 о :f
05'�
i= о=
o.:lif
Дека
Гекто
i\llЛO
Mera
Гига
Тера
Обозначение
междурусское 1 народпое
10
да
lОЗ
\06
109
101�
}\,\
102
r
к
r
т
da
11
k
м
G
т
13
Электроuзл�ерителыiЫJ.tU праборалш называют сред­
ства эJJектричес1шх измерений, предиазна,1ен11ые д.ля
выработки сиrнаJJов измерительной информацин, т. е.
ннформации о значениях измеряемой величины, в фор­
ме, доступной для непосредственного восприятия наблю­
дателем, например амперметр, вольтметр, ваттметр, фа­
зометр.
Из.мерительны1,ш преобразователями называют сре,1ства .электрических измерений, преднпзпаченные для вы­
работки сигналов измерительной информаuии в форме,
удобной для передачи, дальнейшего преобразования,
обработки и (или) хранения, но не поддающейся непо­
средственному восприятию наб.пюдателем. Измеритель­
ные преобразователи можно разделить на: 1) преобра­
зователи электрических величин в эле1<трические, на­
пример шунты, де.�штели напряжения, трансформаторы;
2) преобразователи не.эле1<трических величии в э1,ектр1111еские, например термоэлектрические термометры, тер­
морезисторы, тензорезисторы, индуктивные преобразо­
вате.rш.
Электроиз11.ер1tтельная установка состонт из ряд.а
средств измерений (мер, измерите:1ьных приборов, изr11с­
рительных преобразователей) и вспомогательных уст­
ройств, расположенных в одном месте. При помощи та­
ких установок можно в ряде случаев производить более
сложные п более точные измерения, чем прп помощи от­
дельных измерительных приборов. Электроизмеритель­
ные установки широко исnоJJъзуются, например, для по­
верю-1 и градуировки эJiектроизмерительных приборов
и испытаний магнитных материалов.
Из1,1ерuтельные анфор.мационньLе системы представ­
ляют собой сово1<упность средств из111ерений и вспомоrа­
т�.пьных устройств, соединенных между собой каналюш
связи. Они прсдназна,rены для автоматического получе­
ния измерительной информации от ряда ее источников,
а таюке для ее передачи и обработю-1 (подробнее см.
ГJI. 17).
В зависимости от способа получения результата из­
мерения делятся на прямые и косвенные.
Прщ�ы1,ш называются лзмерения, результат которых
получается непосредственно из опытных данных. Приме­
ры прямых пзмерений: измерение тока амперметром, тем­
пrратуры термометром, массы на весах.
Косвенны1,ш называются из111ерения, при которых
14
11ско�тая веJIИ'П-IНа непосредственно не измеряется, а ее
:-тачение находится на основании известной зависимости
r.1ежду этой величиной и ве.пичинами, поJJученными в
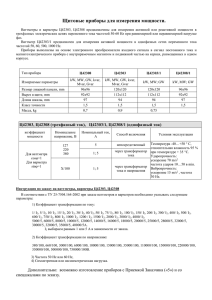
резуJ1ьтате прямых измерений. Например, мощность Р в
цепях постоянного тока вычисляют по формуле P=Vl;
напряжение () в этом случае измеряют вольтметром, а
ток / - амперметром.
В зависимости от соnо1<уп:ности приеi\юв использова­
ния принципов и средств измерений все методы делятся
на методы невосредственной оценки и методы сравнения.
Под методом непосредственной оценки по1шлщют ме­
тод, по 1юторому измеряемая веJш•шна определяется
непосредственно по отсчетному устройству измеритель­
ного прибора прямого действия, т. е. прибора, осущест­
вляющего преобразование измерительного сигны1а в
одном направлении (без применения обратной связи),
например измерение тока амперметром, измерение дав­
J1ення пружинным манометром. Метод непосредственной
оценки прост, но отличается относительно низ1юй точно­
стыо.
Методо.1,t сравнения называют метод, по которому из­
меряемая ве:1ичи11а сравнивается с величиной, воспроиз­
водимой мерой. Отлпчительной чертой метода сравнения
яв.1Jяется непосредственное участие меры в процессе из­
мерения, например измерение сопротивления путем срав­
нения его с мерой сопротивления - образцовой катуш­
кой сопротивления, измерение массы на рычажных весах
с уравновешиванием г ирями. Методы сравнения обеспе­
чивают большую точность измерения, чем методы непо­
средственной оценки, но это достигается за счет уСJюж­
нения процесса измерения.
Методы сравнения подразделяются на нуJiевые, диф­
ференциальные и замещения.
Нулевой _t�етод - это метод сравнения измеряемой
величины с мерой, в котором действие измеряемой ве­
личины на индикатор сводится к нулю встречным дейст­
Бием известной величины. Примером может служить
нзмеренне электрического сопротивления при помощи
уравновешенного моста.
Диффере1-щиальный метод- это метод сравнения с
мерой, по которому прибором измеряется разность меж­
ду измеряемой величиной и известной величиной, вос­
производимой мерой. По дифференциальному методу
происходит непоJiно е уравновешивание измеряемой ве15
личины, и в этом заключается отJiичие диффереюш­
алыюrо метода от нуJJевого. Примером этого метода
может служить измерение электрического сопротивления
при помощи неуравновешенного моста. В этом случае
измеряемое сопротивление будет определяться не только
известными сопротивлениями плеч моста, но и показа­
нием нндиl{атора.
Метод за1,�еr.цения - это метод сравненпя с мерой, по
1юторому измеряемая ве.rшчнна А х заменяется в измери­
·rельной установке известной ве.rшчиной Ао, воспроизво­
димой мерой, причем путем изменения веJiичины Ао из­
меритеJ1ы1ая устанош<а приводится в прежнее состояние,
т. е. достигаются те же показанин приборов, что и при
действии величины А"'· В резу.1Jьтате Ах=А0• Из всех
разновидностей методов сравненин метод замещения
наибоr�ее точен, так 1<ак при замене измеряемой веJ1ичи­
ны известной ника1шх изменений в состоянии и действии
измеритеJiьной установки не происходит, БСJiедствпе
этого погрешность в показанинх измеритеJiьных прибо­
ров не влияет на резуJiьтат измерения. Примером мето­
да замещения может служить измерение сопротпв 11енн,1
с поочередным вк.пючением измеряемого сопро�·юыения
и регулируемого образцового сопротивJiения в одно и
то же ПJJечо моста.
1.2. ПОfРЕШНОСТИ ИЗМЕРЕНИИ
РезуJiьтаты измерения физичес1<0й величины дают
лишь приближенное ее значение. Отклонение резуJJьта­
та измерения от истинного зна1tения измеряемой вели­
чины называют погреи�ностью измерения. Различают
абсолютную и относительную погрешности измерения.
Абсолютная погрешность измерения ЛА равю1 разно­
сп1 между результатом измерения А х и нстинным значе­
нием измеренной веJ1ичины А:
ЛА=Ах -А.
Отпосительн.ая погрешность измерения бл представ­
ляет собой отношение абсолютной погрешности измере­
ния к истинному значению измеряемой величины, выра­
женное в процентах:
16
Так как истинное значение измеряемой величины ненз­
вестно, вместо истинного значения испоJ1ьзуют так на­
зываемое действптельное значение, под которым nониl\Jа­
ют значение измеряемой веJшчины, найденное экспери­
ментальным путем и настолько приближающееся 1<
истинному значению, что может быть использовано вме­
сто него. По этой причине на практике значение погреш­
ности измерения можно оценить только приближенно.
Погрешности считаются положительными, если резуль­
тат измерения превышает действительное значение.
Для получения действитеJ1ыюrо значения измеряемой
величины в ряде случаев учитывают погрешности
средств измерений путем оведения поправок. Поправкой
называется абсолютная погрешность, взятая с обратным
знаком.
Пример. Результат измерения тока l:x= 49,9 А, а ero дейст&и­
тельное значение/ =50,0 А.
Аuсо,1ютная nоrрешность измерения
д/ = fx -1 = 49,9--50,0 =-0,1 А.
Относительная погрешность из:1с1ерсния
0,1
Л/
61 = - 100 =- -- 100 =- О ' 2%.
50
I
Лоnраш,а, 1юторую следует ввести в результат измерешш, рав­
на -Л/ =0,J А.
Погрешности измерений имеют систематическую и
случайную составляющие, которые называют таюке сис­
тематической и слуrlайной погрешностями.
Под састе,��ата•tеска1,щ погрешностями понимают по­
грешности, остающиеся постоянными ИJIИ закономерно
изменяющиеся при повторных измере1шях одной и той
же величины. Систематические погрешности могут быть
определены и устранены путем введения соответствую­
щих поправок. Примером систематических погрешностей
является погрешность rрадуиров1ш прибора, т. е. ошибки
в положении делений, нанесенных на шкалу прибо­
ра. Влпяние внешних факторов (например, коле­
бания температуры, напряжения питания) на средства
измерения также вызывает появление системати,rеских
погрешностей.
Случайными называются погрешности, изменяющие­
ся случайным образом при повторных измерениях одной
и той же величины. Случайные погрешности неJ1ьзя ис­
кюочить опытным путем. Они происходят от влияния на
2-970
17
рсзулr.,т�п нз,•срсния прич1:н ц1учт':iного хараl(тер11, 11�­
т,римt>р r;огрешнuсть uг трс;-11:я в опора\ 1:з\1�р11те:а,ных
1,р1•Gоров.
Уменьшение вл11н1111я с.;1учай11ых 1ю1·рсш1юстt>ii на рс­
зульта т измереннii достпгается путе:.1 шюго:-:ра rны '<
нзмерений веJ1ичины в одина1<ОВЫ\ усJЮБ:1нх. Ес.1и прн­
нять, <rто сист,�матичес1ше погреw11ост11 uлнзr\11 r< пу:110,
:-о наиболее достоверное значен11е, l(Ьтор,1е можно пр11писать из!l1еряе�юй величпне на основаннп ряд11 ил1ере­
ний, есть среднее арифметическое нз по:1уче:1нt:х з11nче­
ний, определяемое 1,а1<
Аср = (а.1 + а1 + · · · + ан)1п,
г,ie а1, а2, ... , а,1 - резудьтаты от,::1.е.;�ьн1,1х изvrерсиий; п чис;ю 1:з��еренпй.
Для оuешщ точности результата измерениii пеобхо­
дпмо знать заксн расnрсдеJ:ения случайных поrрешно­
с.теГ,.
В практи1<е электричесrшх измеренпй одннм из нai1coJJee распространенных законов распреде.1сния спучай­
нь1х погре1J1ностей явJJнется нор.«альный зак.он (Гаусса).
Л1атематичесl(ое вырю1,ение нормаJrыюго закона ю-rе­
ет в11д:
1
e-6•f2a' '
(l 1)
Р (б) =
а
V2тс
где р(б) - плотность вероятности случайной погрешно­
сти б; а - сре.:шее к вадрати•1еское отклонение.
К.ак следует пз (1.1), при б=О
р (б) = 1/и JI2:rc.
Ср1;днее кв,s.дратическоt! отюrоненне может быть вы­
ражено через случайные отклонения результатов наблю­
дения р:
а�
V (Pi + Р� +· · · + P;,)l(n- 1),
где f)1=G 1 -Acp; р2=а2-Аср; рn=й п -А ср .
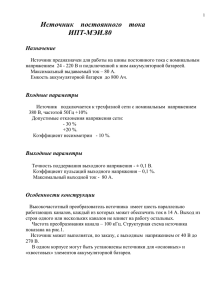
Характер кривых, описываемых уравнением (1.1) ДJIН
двух значений а, поr<азан на рис. 1.1. Из этих кривых
видно, что чем меньше а, тем чаще встречаются малые
с.ТJучайные погрешности, т. е. тем точнее выполнены из­
мерения. Кривые симметричны относительно оси орди­
нат, так 1,ак положительные и отрицатеJ1ьные погрешно�
сти встречаются одинаково часто.
18
Вероятность пояnления лоrрешности со значениями
от б 1 до б2 определяется площадью зашrрихованного
участка на рис. 1.1. При нормальном заl{оне распреде­
ления вероятность появJJения случайных погрешностей в
пнтерnале от б 1 до 6 2 вычисляется как определенный
интеграл от функции р(6):
r,,
j' р (6) dб.
Р=
r,,
Значения этого интеграла вычисленЬJ для различных
пределов (интерва.ттов +Л6) и с:ве,�ены в таблицы, nри­
ведепные в математических
справочниках. ИнтеrраJ1, вы­
численный для пределов от
б1=-оо до 6 2 =+00, равен
единице, т. е. вероятность
появления случайной по­
грешности в интервале от
-оо до оо равна единице.
Это естественно, та1< J{aK все
погрешности имеют конеч­
ные значения.
Рис. J 1. Нормальный закон
Ка1( указываJJось ранее, распределения с.�учайных по­
среднее ариф,1етическое ря­ rрешностеi't.
да из'v!ерений Аср является
лишь наиболее достоверным
значенпем измеряемой величины. Точность результата
измерения АсР можно оценнть с помощью средней квад­
ратической и вероятной погрешностей. ECJIИ случайные
погрешности распределены по нормальному закону, то
сог.пасно теории погрешностей средшrя 1шадратическая
погрешность среднего арифметического значения равна:
а =
А
V
2
Р1
-L
2
Р1
+ · · ·+ Рпl =
n (n- 1)
1
�
•
,, n
Из данного выражения видно, что увеличение rю.1�1чсства повторных измеренпй п приводит к уменыпен;,1ю
средней квадратической погрешности ал резу.пьтата из­
мерений.
Если известен закон распредеJJения случайных П'J­
грешностей, можно определить вероятность появ.'!ения
погрешности 15, не выходящей за некоторые принятые
границы. Этот интервал называют доверuтельны.м интер2*
19
валом, а хара1(теризующую его вероятность - довери­
тельной вероятностыо.
При нормальном законе распределения по табщще
интеграла вероятностей можно определить значения
доверительных интерваJJов. Прн увеш,чении доверитель­
ных интерваJюв значения доверительных вероятностей
возрастают, стремясь I< пределу, равному единице. На­
пример, для доверительного интерваJ1а от б 1 =-и до
б2= +и доверитет,ная вероятность Р равна 0,68. Слсдо­
ватслы-ю, вероятность того, что случайная погрешность
не превышает среднего квадратическоrо значения, равна
0,68. Так как вероятность появдения слр1айной погреш­
ности для доверительного интервада от о 1 =-= до
б2=+= равна единице, то вероятность появления по­
грешности по абсолютному значению, превышающей а,
равна 1-0,68=0,32, т. е. примерно только одно из трех
измерений будет иметь погрешность, большую а.
ДJ1я доверительного интервала от -3 и до + З и дове­
ритеJJьная вероятность равна 0,9973. Вероятность появ­
ления погрешности, большей З cr, равна \-0,9973=
=0,0027 � 1/370. Такая
дооерите.ттьная вероятность
означает, что из 370 случайных погрешностей тоJ1ыю
одна погрешность по абсоJiютному значению бу;:�,ет боль­
ше 3 cr. Поэтому значение 3 и считается максимально
возможной случайной погрешностью. Погрешностп,
большие 3 и, с,штаются промахами и при обработке ре­
зультатов измерений не учитываются.
Kar, указывалось, для оценки точности результата из­
мерения можно воспользоваться вероятной поrрешно­
стыо.
Вероятной погрешностыо называется такая погреш­
ность, относительно которой при повторных измерениях
какой-либо веJшчины одна половина случаfшых погреш­
ностей по абсолютному значению меньше вероятной
погрешности, а другая - больше ее. Из данного опреде­
ления СJJедует, что вероятная погрешность равна дове­
рительно�у интервалу, при котором доверите.ттьная ве­
роятность Р=О,5.
Вероятная погрешность результата измерений, т. е.
среднего арифметического значения, при нормально11.1 за­
коне распредеJ1ении случайных погрешностей равна:
.20
Следует отметить, что уI<азанный способ определения
доверительных интервалов справедлив толыю при боль­
шом количестве измерений (n>20-т30). На практике
чаще всего значение еА приходится определять по ре­
зультатам сравнительно небольшого I<Олнчества измере­
ний. В этом случае при нормальном за�шне распределе­
ния для опредеJJення доверительного интервала нужно
пользоваться коэффициентами Стыодента lп, которые
зависят от задаваемой доверительной вероятности Р и
1юличества измерений n (таб.ТJ. 1.3).
Таблиц а 1.3. Коэффициенты Стьюдента
"
2
3
4
5
6
7
8
9
10
15
20
30
1
0,5
1
0,6 1
1,00 1,38
0,82 1,06
0,77 0,98
0,74 0,94
0,73 0,92
0,72 0,90
0,71 0,90
0,71 0,90
0 ,70 0,88
0,69 0,87
0,69 0,86
0,68 0,85
о. 7
2,0
1,3
1,3
1,2
1,2
1,2
l,1
1,1
1, 1
1,1
1, 1
l,1
1 0,8
3,1
1,9
1,6
1,5
1,4
1,4
1,4
1,4
1,4
1,3
1,3
1,3
1
:.9
1 0,95 1
0,98
6,3
2,9
2,4
2, 1
2,0
1,9
1,9
1,9
1,8
1,8
1,7
1,7
12,7
4,3
3,2
2,8
2,6
2,4
2,4
2,3
2,3
2, J
2, 1
2,0
31,8
7,0
4,5
3,7
3,4
3, 1
3,0
2,9
2,8
2,6
2,5
2,5
1 0,99
1 0,999
63,7 636,6
9,9 31,6
5,8 12,9
8 ,6
4,6
4,0
6,9
6,0
3,7
5,4
3,5
5,0
3,4
3,3
4,8
4, J
3,0
2,9
3,9
2,8
3,7
Д.r�я определения доверительного интервала среднюю
квадратнческую погрешность UA надо умножить на ко­
эффициент Стыодента. Окончательный резу,ТJьтат изме­
рения можно записать так:
A=Acp±t11 aA.
При111ер. Ис1<омое сопротпвле1-111е было измерено 8 раз, прн этом
получены реаультаты: R 1 = 116,2 Ом; R2 = 118,2 Ом; Rз = 118,5 Ом;
R4 = 1l7,0 Ом; R5 = 1l8,2 Ом; Rб=/18,4 Ом; R1=L17,8 Ом; R s=
=118,1 Ом.
Наиболее вероятное среднее значенне сопротнвJ1ен!fя
_ R1+R2+ ...+Rв
Rер8
О+
118
,2 -1-- l\8 ,4 -1-- 117 ,8-1-- 118, 1
116,2 -1-- 118 ,2 + 118 ,5 + l 17 ,
8
= 117,8 Ом.
Остаточные погрешности отдельных и3•1ере11ий Р1 =N 1-Rcp=
=-1,6 0�1; Р2=0.4 Ом; рз=О,7 Ом, р4 =-0,8 О,1; ps=0,4 Ом; fJ6-"
=0,5 О,1; Р1 = 0,О 0\1; Рв = О,З Ом
Средняя ква;1ратичесиая погрешность результата измерения
аА
= vP�+P1+ ... +Р� =
11(n- l)
(- l,6)2+0 ,4•+0,1i+(-0,8)i+o,42,
►
8-7
.....---------
+о,б�+о,02+0,з2
➔
=0,29 Ом.
8_7
Нужно определить интервал, n котором находится значение из­
меряемого сопротивле1,ия, с доnерительной верО$1тностью Р=О,99.
По табл. 1.3 на:хо.:щм для Р=О,99 и n=8 1,оэффиц11с11т t 11 =3,5, то­
гда результат равен: N=Il7,8z3,5X0,29 Ом=117,8±1,О Ом.
Для 011ределе1-1ия вероятной погрешности результата измерения
найдем из rабл l.З значение 1,оэффициента С-rьюдента д.1я довери­
тещ,пой вероятности Р=О,5 и n=8 Коэфф111-1иепт l n =0,71, тогда ве­
роятная погрешность резул1,тата изм(:>рення ЕА =0,71 •О,29=0,2 Ом.
Определим погрешность результата нзмеренин при
косвенных измерениях.
Допустпм, что искомая величина А является извест­
ной функцией полученных прямыми измерениями вспо­
могательных величин В и С:
(1.2)
Требуется определить погрешность величины А, ес­
ли известны погрешности величин В и С.
Прологарифмируем и продифференцируем соотноше­
ние (1.2), положив В и С переменными. В результате
найдем:
dA = F (В С) dB -/- F (В С) dC
А
1
'
В
2
'
с '
где F,(B, С) и F2(B, С)-функции переменных В и С.
Заменив дифференциалы dA, cJB и dC маЛЫ;\\И при•
ращениями, которые можно рассматривать как абсолют­
ные погрешности, получим:
А = F1 (В, С) 8 -1- F2 (В, С) с,
ЛА
или
22
ЛВ
ЛС
(1.3)
где IJA =ЛA/A; бв=ЛВ/В; бс=ЛС/С-относительные
погрешности величин А, В, С.
Уравнение ( 1.3) дает возможность определить
погрешность искомой величины А, зная погрешности вели­
чин В и С. Так как в бо.11ьшинстве случаев знак погреш­
ностей бв и 6с неизвестен, то при определении наиболь­
шей возможной погрешности всегда следует рассматри­
вать неблагоприятный сJ1учай, при котором слагаемые
f1 (В, С) бв и F2 ( В, С) 6с имеют одинаковые знаки.
Определим, например, погрешность измеренин вели­
чины А, которая связана с величннами В и С, найден­
ными прямыми измерениями, соотношением
А=В11 ст,
rде п и т-показатели степени, 1юторые могут быть
целыми, дробными, положительными или отрицатель­
ными.
Взнв логарифмы правой и левой частей уравненин,
получим:
ln А= п ln В + т \n С.
Продифференцировав написанное выраженпе, най­
дем:
dB
dA
О
--=п-+т--.
В
с
А
Заменив дифференщ-1,�лы dA, dB и dC малыми при­
ращениями, запишем:
ЛА =n
или
А
лв
В
+т лс
С
'
п + тбс,
ljл = /Jв
где бА=ЛА/А; 6в=ЛВ/В; /Jс=ЛС/С-относительные
погрешности величин А, В, С.
Пример. Пусть n=-2, m=З, бв=±О,5%, бс=±О,2%. В этом
cJiyчae наибольшая возможная относительная rюrрешность измере­
ния величшrы А составит:
=±(2-0,5 + З·О,2) =
t'>лтлх =± ( 1 t:бв l + 1 тбс 1)
=± (l +О,6) =± l,6%.
Определим наибольшую возможную относительную
погрешность ве.11ичины А, если она сDнзана с величина­
ми В, С и D зависимостью вида
А=В +C-D.
23
Прологарифмировав и продифференцировав данное
выражение и заменив дифференциалы dA, dB и dC ма­
.пыми приращениями, найдем:
б = ЛА = лв+лС-ЛD
/\
А
в+с-D
Если В+ С� D, то погрешность величины А может
быть очень большой, несмотря на сравнительно маJ1ые
погрешности величин В, С и D.
1.3. ПОГРЕШНОСТИ СРЕДСТВ ИЗМЕРЕНИИ
В зависимости от изменения во времени измеряемой
вею�чины различают следующие погрешности средств
измерений:
статическую погрешность - погрешность при измере­
нии постоянной во времени величины;
дuна;,�ическую погрешность - разность между по­
грешностью в динамическом режиме (т. е. при изменении
измернемой величины во времею1) и статической погреш­
ностыо, соответствующей значению измеряе:\ЮЙ величи­
ны в данный момент времени.
В зависимости от условий возникновения погрешно­
стей различают:
основную погрешность - погрешность средств изме­
рений, используемых в нормальных условинх, т. е. при
нормальном положении, температуре оr<ружающей сре­
ды 20+5° С, отсутствии внешнего электрического и маr­
юпного полей, кроме земного, и т. n.;
дополнительную погрешность, под которой понима­
ют погрешность средств измерений, возникающую в ре­
зультате отклонения з11ачения одной из влияющих вели­
чин от нормального значения. Иными словами, это
погрешность, возникающая при отклонении условий экс­
плуатации от нормальных.
Расс!l>ютрим статические погрешности мер и э.1Iектро­
измерительных приборов.
Погрешность меры. Каждая мера имеет номинальное
значение, nо•1ти всегда указываемое специальной над­
nпсыо на самой мере. При изготовлении меры праrсrи­
чески невозможно обеспечить равенство номинального
и истинного значений меры. Разность между номинальным
и истинным значениями меры называется абсолют­
ной погрешностью меры.
24
Поrрешноспt э.лектроизмерительных приборов. По
способу выражения погрешностей измерительных при­
боров различают абсолютную, относительную и приве­
денную погрешности.
Абсолютнав... погрешность прибора Л есть разность
между по1<аза11ием прибора Хп и истинным значением
х измеряемой величины, т. е.
Л = Хп-Х·
Относите аьнЩI погрешность прибора 6 представJ1яет
собой отношен11е абсолютной погрешности к истvнному
значению измеряемой величины. Относительная погреш­
ность, обычно выражаемгя в процентах, равна:
6=
Хп
Х
х
100,
В связи с тем: что истинное значение измеряемой ве­
личины остается неизвестным, при оцеНI<е погрешностей
следует пользоваться вместо него понятием «действи­
тельное значение».
Приведенная погрешность v есть выраженное в про­
центах отношение абсолютной погрешности Л I{ норми­
рующему значению XN:
Xn-X l(IO
v--.
XN
Для nрпборов с нулевой отметкой на краю ИJIИ 1me
шкалы нормирующее значение равно I{Онечному значе­
нию диапазона измерений. Для приборов с двусторонней
ш1<алой, т. е. с отметками ШI{алы, расположенными по
обе стороны от нуля, оно равно арифметической сумме
конечных значений диапазона измерений.
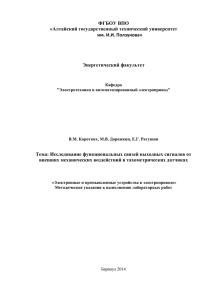
У реальных приборов зависимость абсолютной по­
грешности от измеряемой величины х может быть пред­
ставлена некоторой полосой неопределенности, обуслов­
.nенной случайной погрешностью и изменением хара�<те­
ристю< приборов в результате действия влияющих ве­
личин и вследствие старения. Поэтому значение абсо­
лютной погрешности, как правило, ограничено двумя
прямыми /, симметричными относительно оси абсцисс,
расстояние между zюторыми увеличивается с ростом из­
меряемой величины (рис. 1.2).
Предельные значения абсолютных погрешностей
Лmах могут быть как положительными, так и отрицатель25
нымн, но одинаковыми по модуJ1ю. Их зависимость от
измеряемой величины х характеризуется прямыми !.
Уравнение прямой 1, не проходящей через начало коор­
динат, может быть выражено при помощ1-1 двух постоян­
ных коэффициентов а и Ь. Таким образом,
/Лта -.1 =]aj +]bxj,
где а называют предельным
значением аддитивной по­
Ьх - предель­
грешности,
ным значением мультuплu­
кативной погрешности.
Абсолютные аддитивные
-а
погрешности не sавпсят от
измеряемой веJ1ичины х, а
муJ1ьтипликативные - пря­
·-Л
мо пропорциональны зна­
чению х.
Рис. 1 2 Завпсимость абсолют­
Источншш аддитивной
ной погрешности прнбора от
погрешности
- 1 рение в опо­
нз111еряемоi1 величины.
рах, неточность отсчета,
шум, наводки и вибрации.
От этой погрешности зависит наименьшее зна•1енне ве­
личины, которое может быть измерено прибором. Причи­
ны муJ1ьтиш11шативной погрешности - влияние внешних
факторов и старение элементов н узJ1ов приборов.
Предельное значение относ1пеJ1ьпой погрешности
прибора б�а.:, выраженное в процентах значения из"w1е­
ряемой величины, связано с предельным значением абсо­
лютной погрешности Лmа,._ зависимостью
lб:naxl=
IЛ axl 100
:
=
с:
1
+1ь1) 100.
(1.4)
Согласно ГОСТ 8-401 =81 приборам присваивается
определенный класс точности. Класс точности - это
обобщенная характеристика прибора, определяемая nре­
деJ1ами допускаемых основных и допоJ1нительных по­
грешностей. Пределы допускаемых изменений показаний
от влияния внешних факторов для J1Юбоrо прибора уста­
навJ1нваютсн в зависимости от класса его точности со­
гласно стандартам 11а отдельные nиды приборов. К.ласе
точности может nыражаться одним числом или дробью.
У прибороn, аддитивная погрешность которых резко
преобладает над мультнплнкатнвной, все значения по26
грешностсй оказываются в пределах прямых 2, парал­
:1ельных оси ОХ (рис. 1.2). В резу.пьтате допускаемая
абсолютная и приведенная погрешности прибора оказы­
ваются постоянными в любой точ1<е его шкалы. У таких
приборов класс точности выражается одпим числом, вы­
бираемым из ряда следующих чисел: 1- }0n; 1,5-10 11;
2-l0n; 2,5-I0n; 4-l0n; 5-I0n; 6-I0n, где n=I; О; -1; -2
11 т. д.
У приборов, класс точности которых выражается од­
ним числом, основная приведенная погрешность в рабо­
чем диапазоне шкалы, выраженная в процентах, не пре­
вышает значения, соответствуюшего Елассу точностн.
К таким приборам относится большинство стрелочных
и самопишущих приборов.
Класс точности приборов, у 1<0торых аддитивная и
мультипликативная составляющие основной погрешно­
сти соизмернмы, обозначается в виде двух чисел, разде­
ленных косой чертой, например класс тосrности 0,1/0,05.
Предельное значение основной относительной погрешно­
сти приборов, выраженное в процентах, в этом случае
может быть определено nуте11-1 расчета по формуле
/ l\,, ax 1
= [с + d (\ Xi/Х 1- 1)1,
(1.5}
где Хн - конечное значение диапазона измерений; с и
d - постоянные числа, причем отношение c/d обознача­
ет класс точности прибора.
Например, для прибора класса точности 0,1/0,05
\бтах\ =[о,1+0.05(\хи/х\-1)]%. Класс точности ДОJl­
жен удовлетворять условию c/d> 1.
Так как относительная, абсототнан и приведенная
погрешности взаимосвязаны, то, зная одну из ннх, лег­
ко определить остальные.
К прибора:'11, класс точности которых выражается
дробью, относятся цифровые приборы, а таюке мосты и
компенсаторы как с ручным, так и с автоматическим
уравновешиванием.
Рассмотрим связь между 1<оэффициентами с и d в
выражении ( 1.5) и предельными значенинми аддитив­
ной и мудьтипликативной погрешностей прибора. Учиты­
вая, что предельное значение основной относительной по­
грешности \бтах \, определенное исходя из класса точно­
сти прибора, должно быть всегда больше или равно
предельному значению реальной основной погрешности
27
с: 1
lб'max /, из (1.4) и (1.5) получаем:
откуда
+ 1 ЬI) lOO-<c-d + 1 х; ld,
1 а 1 < Хн d/100;
/ЬI < (c-d)/100.
Каждый измерите.11ьный прибор имеет паспорт, в ко­
тором завод-и.3готовитель указывает максимальную по­
грешность для данной серии приборов. Новые приборы
должны пметь погрешность, которан не превышает 80%
значения, указанного в паспорте.
Все приведенные в данном параграфе сведенин о по­
грешностях средств измерени й относятся в равной мере
ка�< r< измерительным приборам, так и I< измерительным
преобразователям.
1.4. ХАРАКТЕРИСТИКИ ЭЛЕКТРОИЗМЕРИТЕЛЫIЫХ
ПРИБОРОВ
Общими характеристиками электроизмерительных
приборов являются их погрешности, вариация показа­
ний, чувствительность I< измеряемой величине, потреб­
ляемая мощность, время установления показаний и на­
дежность.
Вариация показаний прибора -это наибольшая раз­
ность по1<азаний прибора при одном и том же значении
измеряемой вели•шны. Она определяется при плавном
подходе стрелки к испытуемой отметке ш1<алы при дви­
жении ее один раз от начальной, а второй раз от rюне•r­
ной отметоr< шкалы. Вариация по1<азаний характеризует
степень устойчивости показаний прибора при одних и
тех же условиях измерения одной и той же ве.nичины.
Она приближенно равна удвоенной погрешности от тре­
ния, так 1<ак причиной вариации в основном является
трение в опорах подвижной части.
Чувствительностью I S электроизмерительного nрн­
бора к пзмеряемой величине х называется производная
от перемещения указателя а по измеряемой величине х:
S = da/dx = F (х).
(1.6)
' Понятие чувствительности не распространяется на цифровые
вр11боры.
28
Перемещение указателя а, которое выражается в де­
лениях или миллиметрах шкалы, д.11я обширной группы
приборов определяется, в первую очередь, углом откло­
нения подвижной части а измерительного механизма.
Кроме того, оно зависит от типа отсчетного устройства
и его характеристик (стрелочный или световой указа­
тель, длина шкалы, число делений шкалы и др.).
Чувствительность собственно механизма приборов
этой группы ( независимо от применяемого отсчетного
устройства) равна:
S' = da/dx.
Выражением ( 1.6) определяется чувствительность
прибора в данной точке шкалы. Если чувствительность
постоянна, т. е. не зависит от измернемой величины, то
ее можно определить из выражения
S =а!х.
В этом случае чувствительность прибора численно
равна перемещению уr<азателя, соответствующему еди­
нице измеряемой величины.
У приборов с постоянной qувствительностыо переме­
щение указателя пропорционально измернемой величи­
не, т. е. шкала прибора равномерна.
Чувствt1тельность прибора имеет размерность, зави­
сящую от xaparcrepa измеряемой величины, поэтому, ког­
да пользуютсн термином «чувствительность», говорят
<,чувствительность прибора r< току», «чувствитмьность
прибора к напряжению» и т. д. Например, чувствите.11ь­
ность вольтметра к наnрнжению равна 10 дел./В.
Величина, обратная чувствительности, С= 1/S назы­
вается ценой деления (постоянной) прибора. Она равна
числу единиц измеряемой величины, приходящихся на
одно деление шкалы. Например, если S= 10 дел./В, то
C=O,l В/дел.
При вr<лючении электроизмерительного прибора в
цепь, находящуюся под напряжением, прибор потребля­
ет от этой цепи не1<0торую 1,ющr-юсть. В большинстве
с.11учаев эта мощность мала с точки зрения э1<ономии
электроэнергии. Но при измерении в маломощных цепях
в результате потребления приборами мощности может
изменитьсн режим работы цепи, что приведет r< увеличе­
нию погрешности измерения. Поэтому малое потребле­
ние мощности от цепи, в которой осуществляетсн изме­
рение, является достоинством прибора.
29
Мощность, потребляемая приборам!! в зависимости
от лринuнпа действия, назначения прибора и предеJlа
из�1срен11я, имеет самые разm1чные значения и для боль­
ш11нства прибороn лел{И1 в пределах от 10- 12 до 15 Вт.
После включения эJ1ектроизмерительного прибора в
электричесь.")'Ю цепь до момента установления по1<азаний
прибора, I<огда можно произвести отсчет, проходит не­
который промежуто1< времени (время успокоении). Под
временелt установления показаний следовало бы пони­
мать тот промежуто1( временн, который проходит с мо­
мента из.\1енения иJмеряемой ве.1ич:шы до момента, ког­
да указате.1ь займет положение, соответсrвующее ново­
му значению измеряе:\ЮЙ величины. О,'.1,нако если учесть,
что всем приборам присуща неI<оторая погрешность, то
время, которое занимает перемещение указателя n пре­
делах допустимой погрешности прибора, не представля­
ет интереса.
Под временем установления показаний ЭЛl:'IПроиз­
мерительного прибора понимается промежуток времени,
прошедший с момента подключения нли изменения из­
меряемой величины до момента, когда отклонение ука­
зателsт от установившегося значения не превышает 1,5%
длины ш1<алы. Время установления показаний ДJJЯ боль­
шинства типов показывающих приборов не превышает
4 с.
Цифровые приборы хара�<Теризуются вpeмet-te;,i из­
.мерения, под которым пони��ают время с момента из­
менения из...,,еряемой величины или нача.11а цикла изме­
рения ло �юмента поJJучеиия нового результата на от­
с11етно\1 устройстве с нормированной погрешностью.
Под 1-tадеж1-юстыо электроизмерительных приборов
понимают сnосuбность их сохранить заданные характе­
ристики при определенных условиях работы в течение
заданного врещ;ни. Ес.nи значение одной или несколь­
ких характеристик прибора выходит из заданных пре­
дельных значений, то говорят, что имеет место отказ.
КоJшчсственноi, мерой надежности является минималь­
ная вероятность безотl(азной работы прибора в заданных
промежутке времени и условиях работы.
Верояиюстью безотказной работы называется веро­
ятность того, что в теченне определенного времени Т не­
прерывной работы не произойдет ни одного отказа. Вре­
мя безотказной работы указано в описаниях приборов.
Часто пользуются прби.rшженным значением этого пока-
зо
зателя, определяемым отношением ч11с.1а прибороn, щ�о­
должающих после определенного nремени Т безотказно
работать, 1< общему чиСJJу испытыnае�1ых прибороn.
Например, д.1я амперметров и вольтметров типа
Э8027 минимальное значение вероятности бсзон;азной
работы равно 0,96 за 2000 ч. С.1едоnателыю, вероятность
того, что прибор данного пша сохранит заданные ха­
рактеристи1<и после 2000 ч работы, составляет не менее
0,96, инымп с.110вами, из lO0 nрибороn данного типа пос­
ле работы в течение 2000 ч, 1<ан правило, не более ,1етырех приборов будут нуждаться в ремонте.
К показателям надежности относят таю1,е среднее
вре1,1я безотказной работы прибора, которое определя­
ется как среднее арифметическое время исправной ра­
боты 11:аждоrо прибора. Обычно, 1<огда приборы начи­
нают выпускать серийно, некоторая небо.1Jьшая часть их
отбирается для испытаний на надежность. По11:азатели
надежности, опреде.1енные по результатам этих испыта­
ний, присваивают всей серии пр1iборов.
Гарантий1-tы1,t сроко.м называют период времени, в те­
чение которого завод-изготовитель гарантирует исправ­
ную работу изделия при соблюдении правил э1<сш1уата­
ции прибора. Например, для микроамперметров типа
М266М предприятие-изготовитель гарантирует безвоз­
мездную замену или ремонт прибора в течение 36 мес
со дня отгрузки с предприятия, а для частотомеров ти­
па Э373 этот срок составляет 11 лет.
ГЛАВА ВТОРА51
МЕРЫ ОСНОВНЫХ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИ Н
2.1. КЛАССИФИКАЦИЯ МЕР
В зависимости от степени точности и области при­
менения меры rюдразде,1яются на эталоны. образцовые
и рабочие меры. Эталоном называют средство измере­
ний, обеспечивающее воспроизведение и хранение еди­
ницы физической величины для передачи ее размера
другим средствам измерений.
В зависимости от точности воспроизведения едини­
цы и назначения эталоны подразделяются на первичные,
31
обеспечивающие воспроизведение единицы с наивысшей
достижимой в стране точностью, и вторичные, значение
которых устанавливается по первичному эта.rюну. Вто­
ричные эталоны обычно являются рабочими эталонами
и предназначены для поверки образцовых средств из­
мерения.
Образцовые меры предназначены для поверки и гра­
дуиров1ш рабочих мер и измерительных приборов. Они
могут быть таюке непосредственно и спользованы для
точных измерений. В зависимости от точности образцо­
вые меры подразделяются на три разряда. Образцовые
меры первого разряда наиболее точные. Они поверяют­
ся непосредственно по рабочим эталонам. Образцовые
меры второго разряда поверяются по образцовым мерам
первого разряда и т. д.
Рабочие 1,1,еры изrотавюшаются ДJ!Я широ,юrо диапа­
зона номинальных значений величин и используются для
поверки измерительных приборов и для измерений на
промышленных предприятиях и в научных организа­
циях.
2.2. МЕРЫ ЕДИНИЦ ЭЛЕl(ТРИtlЕСl(ИХ ВЕЛИЧИН
Меры ЭДС. В качестве мер ЭДС, кан образцовых,
таr, и рабочих, применяются нормальные элементы раз­
личных т,лассов точности. Норма,1ьные элементы пред­
ставляют собой специальные гальванические элементы,
ЭДС 1юторых точно известна. Различают нормальные
элементы с насыщенным 11 ненасыщенным раствором сер­
нокислого кадмия. У элементов с насыщенным раство­
ром ЭДС зна•штельно стабильнее, чем у элементов с не­
насыщенным раствором. Преимущество эJrементов с 11е­
нас�тщен11ым раствор9м заключается в меньшем внут­
ренне�� сопротивлении (около 300 Ом) и о очень мало�,
температурном коэффициенте.
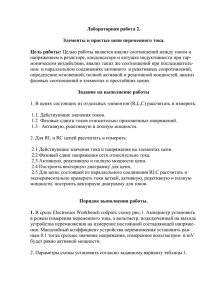
Насыщенный нормальный элемент состоит из запаян­
ного сте1<лянного сосуда Н-образной формы, в нижние
концы которого опаяны платиновые проводники (рис.
2.1). Положите.1ьным электродом / служит ртуть, за­
полняющан нижнюю часть одной ветви сосуда, отрица­
тельным электродом 5 - амальгама кадмия, располо­
женная о нижней части другой ветви сосуда. Над ртутью
расположен слой пасты 2 из смеси сернокислой ртути
(Hg2S04) и сернокислого кадмия (CdS04). Паста яоля32
ется деполяризатором. Электролитом 4 служит насы­
щенный раствор сернокислого кадмия. Насыщение рас­
шора обеспечивается l<ристаллами сернщшслоrо кад�ия
3, помещенными поверх электродов.
Насыщенные нормальные элементы бываю1 трех
классов точности: О,001; 0,002 и 0,005. Значения ЭДС
для этих э.�1ементов нормируются ГОСТ 1954-75. Например, для элементов к.ТJас­
!/
са точности 0,005 при темпе­
ратуре 20" С ЭДС должна
в
находиться
пределах
1,0185-1,0187 В, а ее изменение за год не должно пре­
восходить 50 мкВ. Пропус­
3
кать через элемент ток бо­
лее 1 мкА недопустимо. За­
5
висимость ЭДС насыщенных
элементов от температуры
известна п при отклонении
ее от 20° С должна учиты­ Рис. 2.1. Нормальный элемент.
ваться.
Ненасыщенные элементы
имеют �<ласе точности 0,02, а их ЭДС лежит в пределах
1,0186-1,0194 В при допустимом ее изменении за год
не более чем на 200 мкВ.
Нормальные элементы нельзя трястн и опрокиды­
ват,,, они должны быть защищены от действия сильных
11сточников света и теплоты. Хранить их необходимо при
возможно более постоянной температуре.
Меры электрического сопротивления. Образuовые I и
рабо•mе меры электрического сопротивления выполня­
ются в виде катушеr< сопротивления. Номинальное со­
против.rJение образцовой 1<атуш1ш должно удовлетворять
условию R=lOn Ом, где п-целое число. Минимальное
сопротивление катушки равно 10- 5 Ом, максимаJтьное1010 Ом.
t Слово «обра·щовый», относящееся в ка,ущкам сопротивления,
катушкам 1111дуктив11ости и взаимной индук,ивности и конденсато­
ра,�, указывает на принадлежность этнх элементов к образцовым
мерам. К образцовым мерам относятся таюке высо1што•mые
ср�дства измеренич, которые не называ101'СЯ образцовыми, напри•
мер магазины сонротив.nе1111й, индуктивностей и емкостей высокого
класса точности, вариометры и т. д.
3-970
33
Образцовые катушки сопротивления изготовляются
из манганиновой проволоки или ленты. МаР.rанин- это
спJ�ав Cu (84%), Ni (4%) и Мn (12%). Оп об.11адает
малым температурным коэффициентом сопротивления
(10-5 l/°C), большим удельным сопротивлением
(0,45 мОм• м) и малой термо-ЭДС при контакте с медью
(2 11шВ на l ° C).
Образцовым 1,атушкам сопротивления согласно ГОСТ
23737-79 присваивается один из следующих ютассов точ­
ности: 0,0005; 0,001; 0,002; 0,005; 0,01; 0,02; 0,05; о, 1 и
0,2. Число, определяющее 1<,1асс точности катушки, обо­
значает наибольшую допустимую относительную погреш­
ность, выраженную в процентах.
На рис. 2.2 показано устройство образцовой катуш­
ки. На метаJшический или фарфоровый кар1<ас 1 нама4
3�
1
3
,
�
Ro
Рис. 2.3. э.�ектрическая схем.а сое­
д инений токовых и потенциальных
зажимов.
Рис. 2.2. Образцовая катуш­
ка соnрОТИВJIСНИЯ.
Рис 2 4-. Эквивалентная электри­
ческая схема катушки соnротив,1е­
ния.
тывается обмотl{а 2 из м�нганиновой прово-1101<и, концы
I{оторой припаиваются к зажимам 3 и 4. Каркас катуш­
ки крепится к корпусу с отверстиями для лучшего ох­
лаждения обмотки. В некоторых конструкциях каркас
заполняется трансформаторным маслом, что повышаеr
34
влагостой1<0сть изоляции и улучшает условия теплоотда­
чи обмопш.
Катушки снабжаются четырьмя зажимами, два из
которых называются токовыми (зажимы 4) и предна­
значены для включения образцовой катушки в цепь то­
ка, доа других называются потенциальными (зажимы
3). Потенциальные зажимы предназначены для измере­
ния падения напряжения на сопротивлении катушки
(рис. 2.3).
Образцовые катушки должны иметь возможно мень­
шие собственные ем1шсть и инду1пионость. В первом
приближении э�,;вивалентную схему катушек сопротивле­
ния можно представить в виде схемы на рис. 2.4.
Степень безреа1<тишюсти катуш1ш обычно характе­
ризуется постоянной времени, под которой понимается
величина
(2.1)
где L0 - индуктивность; Со - распределенная емкость
катушки.
Чем меньше постоянная оремени т, тем лучше ка­
туш1<а.
Из (2. 1) следует, что у катушек с относительно ма­
лым сопротивлением постоянная времени определяется
преимущественно индуктивностью, а у катушек с боль­
шим сопротивлением - ем1<0стью.
Для уменьшения постоянной времени катуше1{ при­
меняются специальные виды намопш. Индуктипность
Рис. 2.5. Схема бифилярной на­
мотю1.
очень мала, когда намоп{а бифилярная и когда провод­
НИI< намотан на тонкую изоляционную n.ТJастину. При би­
филярной намотке проводник складыпается вдвое, обе
стороны получипшейся длинной петли п"1отно прикла­
дьшаются друг 1< другу, и такой сдвоенный провод па­
матыоается на 1<аркас (рис. 2.5). В результате токи, про­
теl(ающие по двум соседним проводникам, направлены
встречно н их суммарное магнитное поле практически
равно нулю. Однако бифилярная обмотка, состоящая из
3*
35
значительного числа випюв, обладает заметной собст­
венно й распределенной ем1<остью. Д.11я уменьшения ем­
кости бифилярной обмотки ее разделяют на ряд сеI<Ций.
Благодаря последовательному соединению ем1юстей от­
дельных секций общая ем,юсть обмотки снижается.
Снижение индуктивности обмотки, выполненной на
тонких пластинах, происходит за счет малой площади се­
чения витков.
Наборы различных катуше1< сопротиолений, смонти­
рооанных в одном I<орпусе, называются магазинами со­
противлений. Катушки сопротиолений, испо,1ьзуемые в
магазинах, по конструкции проще образцовых катушек
и поэтому уступают им по точности. Специальные пере­
ключатели позооляют набирать из имеющихся в магази­
не катушек различные значения сопротивлений.
В зависимости от 1,т,струrщии переключающего уст­
ройства различают магазины сопротивлений с втычным.и
и рычажными 1<0нтактами. В магазине с втычными кон-
!Ом
20м
30м
40М
Рис 2 6 Схема устройства маrазнна соnротив.nений с втычными кон­
тактами.
таюами (рис. 2.6) 1<аждую I<атушку можно закоротить,
вставив соответствующий контакт. На рис. 2.6 стрелка­
ми указан путь тока, когда подобрано сопротивление,
равное 2+4=6 Ом (два втычных контакта вь11-1уты). Ка­
тушки в штепсельном магазине соединяются группами,
значения сопротио,1ений катуше1< в группе находятся в
отношении 1 : 2: 3: 4. Каждая следующая группа из че­
тырех катуше1< имеет сопротивление в 10 раз больше
предыдущей. При таком наборе требуется наименьшее
количество катушек д.�1я получения заданного сопротив­
ления. Например, магазин сопротивлений, состоящи й из
шести групп катушек, позволяет получить сопротив.�1е­
ния от 0,1 до l l l 110 Ом через 0,1 Ом. При работе с ма­
газином с втычными 1юнта�<тами следует учитывать, что
действительное значение вилюченного сопротивления бу36
дет больше номинального на сумму 1ю11та�пных сопро­
тивлений всех вставленных контактов.
Рычажные магазины состоят из набора катушет<, при­
соединенных к I{ОНтактам, по 1юторым с1юльзят шетки,
жестl{о Сl{репленные с рычагами (рис. 2.7). Значение
введенного суммарного сопротивления отсчитывается не­
посредственно по положению рычагов. Рычажные мага­
зины выполняются обычно как деr<адные. Каждая дека-
xt00 Ом
х10Ом
Рас. 2.7. Схема устройства ры•1ажноrо магазина сопротивлений.
да имеет девять одинаковых 1<атушек Катуш1ш следую­
щей декады имеют сопротивление, в 10 раз больше со­
против,1ения предыдущей декады. При положениях ры­
чагов, изображенных на рис. 2.7, в магазине набрано
сопротивление 274 Ом.
В паспортах магазинов сопротивлений обычно ука­
зываются до11устимые погрешности магазина, допусти­
мый то1<, наrруз1(а в ваттах на катушку и частотный ди­
апазон.
Магазины сопротивлений могут служить не только
мерами, но и реостатами для регулирования тока и на­
пряжения.
Меры индуктивности и взаимной индуктивности.
Образцовые и рабочие меры индуктивности и взаимной
индуктивности представляют собой катушl{и индуктивно­
сти и взаимной инду1пивности. КатушL<и должны сохра­
нять постоянство индуктивности с течением времени и
обладать малым а1пивным сопротивлением, независимо­
стыо индуJ{тнвности от значения тока и возможно малой
зависимостью инду1пив11ости от частоты и температуры.
Образцовые катушки индутпивности (рис. 2.8) пред­
ставляют собой пластмассовый или фарфоровый каркас
с наложенной на него обмоткой из медной изолирован•
ной проволоки. Использование каркаса из немагнитного
37
материала исr<лючает зависнмость индуктивности от то­
I<а в 1<атушке. Для уменьшения влияния внешних маг­
нитных полей т<атушки экранируют. Образцовые катуш­
!(И индуктивности изготовляют с пятью номинаJ1ьными
значениями: 1; 0,1; 0,01; 0,001 и 0,0001 Г.
Образцовые катушки взаимной индуктнвности отли­
чаются от J<атушек индуктивности наличием двух обмо­
-rок, жестко укрепленных на общем каркасе.
Рис. 2.8. Образцовая катушка индуктивности.
Катушки индуктивности и взаимной индуктивности
предназначены для работы в цепях переменного тот{а с
частотой до 10 кГц.
В т<ачестве образцовых и рабочих мер переменной
индут<тивности и взаимной индуктивности служат варио­
метры. Вариометр состоит из двух иатушек, одна из ко­
торых подвижная. Она может перемещаться относитель­
но неподвижной катушки. Путем изменения взаимного
расположения катушек можно плавно изменять значение
индуктивности или взаимной индуктивности. Точность
вариометров ниже точности образцовых катушек индук­
тивности.
Наборы различных t<атушек индуктивностей, смонти­
рованных в одном тюрпусе, называются магазином ин­
дуктивностей. Иногда в состав магазина индуктивностей
входит также вариометр.
По принципу выполнения де1<ад и внешнему офор��­
лению магазины инду1<тивностей аналогичны магазинам
сопротивлений. У большинства магазинов при 11зменении
индуктивности общее активное сопротивление магазина
остается неизменным. Для этого в магазине предусмот­
рены натушки сопротив.пения, замещающие активное со­
протио.1ение ВЬJI(ЛЮчаемых 1<атушеr< инду1<Тивности.
Меры емкости. Образцовые и рабочие меры емкости
представляют собой конденсаторы постоянной илtI пере­
��енной ем1<0сти. К ним предъявляются следующие ос­
новные требования: минимы1ьная зависимость емкости
от времени, температуры и частоты; ;,1алые потери в ди38
эле1<трике, характеризуемые тангенсом угла потерь; вы­
сокое сопротивление и прочность изоляции.
В наибольшей степени этим требованиям отвечают
nоздушные конденсаторы. Они выпускаются как постоян­
ной, та�< и переменной емкости. Однако из-за низкоr1
диэлектрической проницаемости воздуха воздушные кон­
денсаторы имеют большие габариты даже при малом
значении ем1<ости, поэтому образцовые I<О1Щенса1оры по­
стоянной емкости с воздушным диэлектриком имеют ем­
кость не более 0,01 мкФ. Максимальная емкость воз­
душных конденсаторов переменной емкости обычно не
превышает 1100 пФ.
В образцовых конденсаторах с большим значением
емкости в качестве диэ,1ектри1,а используется слюда.
Слюдяные конденсаторы имеют худшие электрические
параметры, чем воздушные, в частности больший тан­
генс угла дuэле1прических потерь, но позволяют полу­
чить значительные емкости (до l мкФ) nри небо,1ьших
габаритах. Они состоят из тонких металлических пла­
стин со слюдяными прослойками.
Слюдяные 1юнденсаторы выпускаются в виде I<ак от­
дельных мер с постоянным значением емкости, так и ма­
газинов емкостей. Магазины емкостей состоят из отдеJ1ь­
ных конденсаторов постоянной емкости. В отличие от
магазинов сопротив.!Jсний, где отдельные резисторы сое­
диняются последовательно, в магазинах емкостей для
получения суммарной емкости нес1<0лышх конденсаторов
их соединяют между собой параллельно.
В настоящее время широrю применяются магазины,
состоящие из двух блшшв, например магазин емкостей
типа Р5025. Первый блок этого магазина имеет три де­
кады со ступенчатым изменением ем1<0сти от 0,001 до
1,111 мкФ (переr,лючатели рычажные) и одну деr<аду
с плавным изменением емкости от 0,0001 до 0,001 мкФ.
Второй бло1< имеет две де1,ады со ступенчатым измене­
нием е1\1кости от 1,0 до 110 м1,Ф (втычные тюнта�,ты).
Наибольшее значение емкости магазина составляет
111,111 мкФ. Магазин типа Р5025 предназначен для ра­
боты в диапазоне частот от 40 Гц до 30 нГц. Погреш­
ность первого блока не превышает 0,1 % второrо0,5%.
39
2.3. ЭТАЛОНЫ ЕДИНИЦ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
К эталону основных единиц электрических величин
относитсн эталон силы э,1ектричес1шrо тш<а.
Единица силы тока ампер есть сила неизменяющеrося
тока, который, проходя по двум параллельным прямо­
линейным проводникам бесконечной длины и ничтожно
малого кругового сечения, расположенным на расстоя­
нии t м один от другого в вакууме, вызывает между эти­
ми проводниками силу, равную 2· I0-7 Н на каждый
метр длины.
Установка для воспроиз\Зедения ампера представля­
ет собой точные равноплечие весы. к одному из плеч которых подвешена рабочан
подвижная
1<атушка
К1
(рис. 2.9). Рабоцая катушка
помещена внутри неподвиж­
ной катушки К2, и через обе
пропущен один и тот же ток.
Сила взаимодействия двух
1,атушеr, пропорциональна
квадрату тока и уравнове­
шивается силой тяжести,
создаваемой гирями, подве­
шенными к другому плечу.
Значение груза, уравнове­
Кz
шивающего силу взаимодействия между катушка ми при
токе I А, находят расчетным
путем.
Рис. 2.9. Схема устройства токовых весов.
Точность устанощш тока
1 А зависит от точности оп­
ределения геометрических размеров катушки и силы тя­
жести, обусловленной гирями. В ампер-весах фактичес1ш осуществляется сопоставление то1,а с единицей длины
( измерение размеров 1,атушки), единицей массы (гари)
и единицей времени, так кан сиJ1а тяжести вычисляется
по массе гирь и по значению ускорения свободного па­
дения, в форму.1Jу которого входит время. Таким обра­
зом, ампер воспроизводится через основные единицы метр, килограмм и секунду.
К эталонам производных единиц относятся эталоны
ЭДС, электрического сопротивления, индуктив-ности и
электрической емкости.
40
Эталон ЭДС состоит из 20 насыщенных нормальных
элементов и устройства сравненин (компаратора) для
взаимного сличения нормальных элементов. Такую со­
вокупность мер называют групповым эталоном. Элек­
тродвижущая сила каждого из элементов с течением вре­
мени может несколько колебаться в ту или иную сторо­
ну, но среднее значение ЭДС всей группы оказывается
стабильным.
Эталон индуктивности является групповым и состоит
из четырех катушек. Индуктивность катуше1< зависит от
числа витков и их линейных размеров, т. е. может быть
определена путем измерения этих размеров. Это равно­
сильно сравнению эталона индуктивности с метром, яв­
ляющимся единицей основной величины - длины.
Эталон электрического сопротивления (эталон ома)
также является групповым - он состоит из lO мангани­
новых катушек электрического сопротивления с номи­
нальным значением I Ом, помещенных в двойных гер­
метичесrшх кожухах, заполненных сжатым воздухом.
Поверка первичных эталонов ЭДС и сопротивления,
т. е. нахождение их числовых значений, осуществлнется
с помощью первичного эталона индуктивности (эталона
генри) и первичного эталона ампера, т. е. с помощью
ампер-весов. Для этой цели при помощи специальных
методов сравнивают сопротивление R катушки с индук­
тивным сопротивлением Х=юL эталона индуктивности
на переменном токе, частота которого точно известна.
Круговая частота Ф связана с периодом переменного
тока Т зависимостью ю=2пf=2п/Т.
Элеkтродвижущая сила нормального элемента срав­
нивается с падением напряжения на измерительной ка­
тушке, входящей в состав эталона сопротнвления, при
прохождении по ней тока, измеряемого ампер-весами.
Эталон электрической емкости представляет собой
воздушный конденсатор переменной емкости специаль­
ной конструкции. Выходным параметром эталона явля­
етсн изменение его емкости ЛС, возникающее при пере­
мещении его подвижной части на 100 мм. Изменение ем­
кости определяют расчетным путем.
41
ГЛАВА ТРЕ1ЬЯ
ПРЕОБРАЗОВАТЕЛИ ТОКОВ И НАПРЯЖЕНИИ
3.1. ШУНТЫ И ДОБАВОЧНЫЕ РЕЗИСТОРЫ
Шунт является nростейшим измерительным преобра•
зователем тока в напряжение. Он представляет собой
четырехзажимный резистор. Два входных зажима, к ко­
торым подводится ток /, называются токовыми, а два
выходных зажима, с которых снимается напряжение U,
называются потенциальными (рис. 3.1). К потенциальРис. 3.1. Схема соединения измери­
тельного механ11зма с шунтом.
ным зажимам обычно присоединяют измерительный ме­
ханизм ИМ прибора.
Шунт характеризуется номинальным значенпем вход­
ного тока Zном и номинальным значением выходного на­
пряжения Ивом- Их отношение определяет но:-.1ина.·1ьпое
сопротивление шунта Rш = Uнo�JZ11oi1.
Шунты применяются для расширения пределов изме­
рения измерительных механизмов по току, при этом
большую часть измеряемого тока пропускают через шунт,
а меньшую - через измерите.1Jьный механизм. Шунты
имеют небольшое сопротивление и применяются, глав­
ным образом, в цепях постоянного тока с магнитоэлект­
рическими измеритедьными механизмами.
На рис. 3.1 приведена схема включения магнитоэлек­
трического механизма ИМ с шунтом Rш . Ток /0, проте­
кающий через измерительный механизм, связан с изме­
ряемым током / зависимостью
/ = / Rш
и
Rш
+ R:,'
где Rи - сопротивление измерительного механизма.
Ес.1и необходимо, чтобы ток 1 11 был в п раз меньше
то1<а /, то сопротивление шунта должно быть:
Rш = Rиl(n - 1),
где n=l//111 - коэффициент шунтирования.
42
Шунты изготовляют из манганина. Если шунт рассчи­
тан на небольшой ток (до 30 А), то его обычно встраива­
ют в корпус прибора (внутренние шунты). Для измере­
ния больших токов используют приборы с наружны11,ш
шунтами В этом случае :мощность, рассеивас11,1ая в шун­
те, не нагревает прибор
На рис. 3.2 показан наружный шунт на 2000 А Он
имеет массивные наконечники из :меди, которые служат
для отвода тепла от манганиновых пластин, вnаянных
между ними. Зажимы шунта А и Б - токовые. Измери-
в
Рис 3 2 Наружный шунт.
тельный механизм присоединяют •< потенциальным за­
жимам В и Г, между которыми и заключено сопротивле­
ние шунта. При таком включении измерительного
механизма устраняются погрешности от конта�пных со­
противлений.
Наружные шунты обычно выполняются калиброван­
ными, т е. рассчитываются на определенные токи и па­
дения напряжения. По ГОСТ 8042-78 калиброванные
шунты должны иметь номинальное падение напряжения
10, 15, 30, 50, 60, 75, 100, 150 и 300 мВ.
Д.пя переносных магнитоэлектрических приборов на
токи до 30 А внутренние шунты изготовляют на несколь­
ко пределов измерения. На рис. 3 3, а, 6 показаны схемы
многопредельных шунтов. Многопредельный шунт состо­
ит из нескольких резисторов, которые можно переклю­
чать в з,шисимости от предела измерения рычажным
переключателем (рис. 3 3, а) или путе,1 переноса прово­
да с одного зажима на другой (рис. 3 3, 6).
Применение шунтов с из,..1ерительными Мf'ханизмами
других систем, кроме магнптоэлектричес,юй, нерацио­
нально, так как другие измерительные механизмы по43
требляют большую мощность, что приводит к существен­
ному увет,чению сопротивления шунтов и, следова­
тельно, к увеличению их размеров и потребляемоir
мощности.
При работе шунтов с измерительными механизм ами
на переменном токе возникает дополнительная погреш­
ность от изменения частоты, так как сопротивления шун/3
�---<ИМt------' а}
'------1и.м1-----'
Рис. 3 3. Схемы многопредепьных шунтоn.
о,
а - шунтз с: рыч"жным nерекл1оt131"е.пе\1; 6 - шуита с отде.n.ьными выводвr..иt
та и измерительного механизма по-разному зависнт от
частоты.
Шунты разделяются на классы точности 0,02; 0,05;
О, 1; 0,2 и 0,5. Число, определяющее класс точности, обо­
значает допустимое отклонение сопротивления шунта в
процентах его номинального значения.
Серийные шунты выпускаются для токов не более
5000 А. Для измерения токов свыше 5000 А допустимQ
параллельное соединение шунтов.
Добавочные резисторы нв.пяются измерительными
преобразователями напряжения в ток, а на значение
тока непосредственно реагируют измерите.11ы1ые меха­
низмы стрелочных вольтметров всех систем, за исклю­
чением электростатической и электронной. Добавочные
резисторы служат для расширения пределов измерения
по напряжению вольтметров различных систе\f и других
приборов, имеющих параллельные цепи, под1<Лючаемые
к источнику напряжения. Сюда относятся, напрюлер,
ваттметры, счетчики энергии, фазометры и т. д.
Добавочный резистор включают последовательно с
из�ерительным механизмом (рис. 3.4). Ток /,, в цепи.
состоящий из измерительного механизма с сопротивленп­
ем Rи и добавочного резистора с сопротивлеппем Rд, со­
ставит:
lи = И l(Rи + Rд),
где И - измеряемое напряжение.
44
Если вольтметр имеет предел измерения Ином и со­
противление измерительного механизма R11 и при помо­
щи добавочного резистора Rд надо расшир1пь предел
измерения в п раз, то, учитывая постоянство тока / 11,
протекающего через измерительный механизм вольтмет­
ра, можно записать:
U,юмlR11 = nUн01,/(Rи + Rд),
откуда
Rд= R11 (n-1).
Добавочные резисторы изготовляются обычно из изо­
лированной манганиновой проволо1ш, намотанной на пла­
стины или каркасы из изоляционного материала. Они
Рис 3 4. Схема соединения измеритель­
ного механизма с добавочным резисто­
ром.
применяются в цепях постоянного и переменного тока.
Добавочные резисторы, предназначенные для работы на
переменном токе, имеют бифи.1J.ярную обмотку для полу­
чения безреактивноrо сопротивления.
При применении добавочн ых резисторов не только
расширяются пределы измерения вольтметров, но и
уменьшается их температурная погрешность. Если при­
нять, что обмотка измерительного механизма имеет тем­
пе ратурный коэффициент сопротивления [3 it , а добавоч­
ный резистор - температурный коэффиuиент сопротив­
ления Вд, то темнературный коэффициент всего вольт­
метра В (рис. 3.4) равен:
(3 = (f3и Rи + �д R д)t(Rи + Rд).
Обычно Вц =О, тогда
А
-А __!§__ •
JJ-t-Jи
R11,Rд
В переносных приборах добавочные резисторы изго­
тов.1яются секционными на несколько пределов измере­
ния (рис. 3.5).
45
+
75м8
Добавочные резисто­
ры бывают внутренние и
наружные. Последние вы­
полняются в виде отдель­
ных
блоков и подразде­
'---v----'
ляются
на индивидуаль­
Rд2
ные и I<алиброваюrые.
рези­
Индивидуальный
стор применяется тоJJько
Рис. 3.5. Схема мноrопредельноrо
с тем прибором, который
вольтметра.
с ним градуировался. Карезистор
либроваш-,ый
может применяться с лю­
бым прибором, номина.1JЬный ток которого равен номи­
налыюму току добавочного резистора.
Калиброванные добавочные резисторы делятся на
классы точности 0,01; 0,02; 0,05; О,1; 0,2; 0,5 и 1,0. Они
выпоJшяются па номинальные токи от 0,5 до 30 мА.
Добавочные резисторы применяются для преобразо­
вания напряжений до 30 кВ.
3.2. ИЗМЕРИТЕЛЬНЫЕ ТРАНСФОРМАТОРЫ.
ОБЩИЕ ПОНЯТИЯ
Измерительные трансформаторы подразделяются на трансформа­
торы тока и напряжения н предиазначаются соответственно для пре­
образования больших переменных токов н напряжений в относнтель1ю ма:1ые тою1 и напряжения. Благодаря трансформаторам можно
применять приборы с небольшими стандартны1-1и номинальными зна­
чениями тока и напряжения (например, 5 А н 100 В) в высоковольт­
ных цепях, по которым могут протекать боJ1ыпие токи.
Измерительные трансформаторы состоят и:-� двух изолированных
друг от друга обмоток, тюмещениых на магнитопроводе: первичной
с числом витков w 1 и вторичной с числом витков w2 (рис. 3.6, а, 6).
При измерениях в высоковольтных цепях трансформаторы обес­
печивают безопасность обслуживания приборов, присоединенных к
вторичным обмоткам. Это достигается ЗJ счет электрической изоли­
ции (гальванического разделения) первичной и nторичной обмоток
трансформаторов и зазе:.1ления металлического корпуса и nторичной
обмотки. Прн отсутствии заземлении и повреждении изоляции меж­
ду обмотками вторичная обмотка и подключенные к ней приборы
окажутся под высоким потенциаJюм, что недопустимо.
D трансформаторах тока, как правило, первичный ток /1 больше
вторичного /2. Первичная обмотка выполняется из провода разлю1ноrо сечения в зависимости от номинального первичного тока 1 1 "ом.
Если / 1ном пре:Gышает 500 А, она может состоять из одного витка
в виде примой медной шины (или стержня), проходящей через окно
сердечника. Вторичная обмотка у всех стандартных трансформато­
ров тока нама1ывается из проводов небольшого сечения. В соответ46
ствии с ГОСТ 7746-78Е вторичный номинальный ток /2ном J.1южет
быть \; 2; 2,5; 5А при значениях l1ном в пределах от 0,8 до 40 ООО А.
В трансформаторах напрях,ения первичное напряжение U1 боль­
ше вторичного U2, поэтому у них w 1 >w2, Обе обмотки выполняются
из относител ьно тонкого провода (первичная - из более тонкого,
чем втори•шая). Вторичное номинальное 11апряже�е И2"с" у стацио11арных трансформаторов сос1 аnляет 100 и 100/ 3 В при первичном
номинальном напряжении U1ном до 750/Vз В.
По схемам включення в измеряемую цепь и ус.nов,1ю работы
трансформаторы тока и напряжения отличаются друг от :друга. Пер­
вичная обмотка трансформаторов тока, выводы которои обознача­
ются буквами Л 1 , Л2 (линия), включается в измеряемую цет, пос.�е­
дова1еJ1ьпо (рис. 3.6). Ко вторичноi'r обмотке, выводы которой обо-
V
иt
U1/ Zнцr
Фо
'2
о)
Рнс. 3 б. Схемы вкточения измеритедьных трансформаторов.
трансформатора тока; 6 - 1'равсформатора наор"же111111.
ц-
значаются буквамн И,, И2 (и з�1ерение), последовательно подключают
амперметры, nосJ1едовательные обмотки ваттметров, счетчиков и
других приборов. Первичная обмотка трансформатора напряжения,
выводы которой обозначаются буквами А, Х (нача.�о - конец), вклю­
чается в измеряемую цепь параллельно, а к выводам вторичной об­
мотки, обозначаемой соответственно буквами а, х, подключают па­
раллельно вольтметры, параллельные цепи ваттметров, счет,rнков и
других приборов.
По показаниям приборов, включенных во вторичные обмотки,
можно опредеJШть значения измеряемых величин. Для этоrо их по­
казания надо умножить на де11стнительные коэффициенты трансфор­
мацип К1 и Ки. Для трансформатора тока К1 =1 1//2• Дш1. трансфор­
матора напряжения Ки =И,!И2,
Действительные коэффициенты трансформации обычно неизвест­
ны, так как они зависят от режима работы трансформатора, т. е. от
значений токов и напряжений, хараt{тера и значения сопротивления
нагрузки вторичной цепи и частоты тоr{а; поэтому показан11я прибора
умножают не на действительные, а на номинальные коэффициенты
трансформации. Они указаны на щитке тра}1сфор,1атора в виде дро­
би, числитель которой есть номи11алыюе зна•1сние первичной, а зна­
менатель - вторичной величины. Номинальный коэффициент транс-
47
формации для данного трансформатора имеет постоянное значение.
Для трансформаторов тока обозначим ero К 1ном, дJ1я трансфор\Iа­
торов напряжения - КииомОтносительная погрешность в процентах из-за неравенства дей­
ствительного и номинаJ1ьноrо коэффициентов трансформации опре­
деш1ется выражениями:
для трансформатора тока
1;- 11
/1
rде/f=К111ом
12 ,
11
=
К112;
для трансформатора напряжения
и; - U1
Ки11ом - Ku
100 =
100,
Ки
И1
где и;=КиномИ2 , И 1= 1<uИ2 nогрешиость у 1 называется токовой погрешностью, а vи - по­
грешностью напряжения. Кроме этих погрешностей у измеритеJiьных
трансформаторов имеется еще так называемая уrловая погрешность.
Она возникает всJIСдствне фазовых сдвигов между первичной и вто­
ричной величиной, вносимых тра11сформатором.
В идеальном тр ансформаторе 11ектор вторичного тока /2 сдвинут
по фазе относительно вектора первн•шоrо тока / 1 на 180". Такой же
сдвиг по фазе должен быть между векторами вторичного U2 и пер­
вичнш·о U 1 напряжений в трансформаторе напряжения. I3 реальном
трансформаторе yroJI между повернутым на 180° вектором вторичной
величины и соответствующим вектором первич,ной величины не равен
нулю, а состав.•шет угол 6, который называется угловой погреш­
ностыо трансформатора. Погрешность счнтается положитеJiьной, если
повернутый на 180° вектор вторичной величины опережает вектор
nервичной величины.
Угловая погрешность измер1•тсльных трансформаторов влияет
ТОJJько на показания приборов, отклонение подвижной части которых
зависит от сдвига фаз между токами в цепях этих приборов. К 1-1и\1
относятся ваттметры, счетчики энергии и фазометры.
'Vu =
3.3. ИЗМЕРИТЕЛЬНЫЕ ТРАНСФОРМАТОРЫ ТОКА
Трансформатор тока работает в режиме, близком к коротко\1у
замыканию, так как в его вторичную обмотку включаются приборы
с малым сопротивлением. Полное суммарное сопротивление Z=R+
+ jX приборов и подводящих проводов является нагрузкой транс­
форматора тока.
На рис. 3.7 приведена векторная диаграмма трансформатора тока,
построение которой на•�инают с вектора i�i! 2 - маrнитодвижущей
силы (МДС) вторичной обмотки. Вектор напряжения И2 получают
ю,1к сумму векторов напрвжсииii i2R и i 2X на �тнвном R н реактив­
ном Х сопротивлениях нагрузки при токе /2 во втори 11иой цепи
трансформатора,
48
Электродвижущая сила п;, наводимая во вторичной обмотке
потоком Ф0 в маrннтопроводе, noJJyчeнa в результате с.JJоження ве1<­
тора U2 с ве1tторами т;R2 и i2X2 напряжений на активном R.2 сопро­
тивлении втори чной обмотки и его реактивном сuп ротивJJенин Х2,
обуСJювJ1енном потоком рассеяния.
Выше отмечалось, что вектор МДС i2w2 с;шинут по фазе отно­
сительно вектора МДС i,w, почти на 180°, т. е. МДС i2w2 оказывает
деi1ствие.
раз�<аrн иr;ивающее
Вследствие этого маrиитный поток Ф 0 в магннтопроводе созда­
ется рсзу.JJьпrрующей МДС /�ш,,
называемой полной МДС транс­
форматора.
Магнитодвнжущая сида i0w1
создается намагничивающим то­
ком 10, практич ески р авны м току
холостого хода трансформатора.
Под током холостого хода пони.j,0
мают ток первичной обмотки, ко--торый при разомкнутой вторичной обмотке создает в магнитапроводе номинальный ДJIЯ данно­
го режима магнитный поток.
Магнитодвижущая си.ча i0w,
сосrоит из реактивной составляющ е!"1 / ft W i,
непосредственно
создающей поток Ф0 11 совпадаю­
щей с ним по фазе, н активной Iz Wz
сост;шдяющей i0w,, опережающей
Фо на 90° и определяемой поте­
Рис. 3.7. Векторная диаграмма
рями на гистерезис и вихревые
трансформатuра тока.
токи в магнитопроводе.
Вект ор .МДС i,w 1 получен
пvтем с.qожения вектора
МДС
/�w, с повернутым на 180° вектором МДС 1;w�. т. е_
io W1 = j l W1 + i2W2-
(3 .1)
r:rpи номинальном режиме работы трансформатора тока значе­
ние / 0 ш 1 обь11шо составJ1яет не боJ1ее 1 % 1;w, (или 1;w2).
При достаточной мощности цепи первичного тока размыкание
вторичной цепи трансфор�rатора тока вызовет значительное уве.пичение Ф0 , поскольку в этом сJ1учае iow 1 =i,w 1• Это может привести
к аварии, так как возрастание потока в магнитопроводе приводит
1< большому увели,1ению ЭДС (до нrскодьких сотен вольт), что опас­
но для обсдуживающсrо nepcoнaJia и может вызвать электрический
пробой изошщии об111оток. Кроме того, увеJ1ичение потока сопровож­
дается ростом потер,, на перемагничивание 11 вихревые токи, повы­
шением температуры магнитопровода, а следоватедьно, и обмотоr< и
может служиn, при•�иной термического разрушения их изоляции.
Из векторной диаграммы и уравнения (3.1) можно сделать сле­
дующие выводы.
4-97{)
49
Токовую погрешность для одного зна 1ения /2 можно свести к
нушо подбором числа випюв ш2 вторичной обмот1ш. Для других
значений то1<а /2 погрешность не будет равна нулю, так как ток /0
не пропорционален ТО'-У 12 •
Погрешности трансформатора тока увеличиваются по мере ВО.!­
растания МДС iow,.
Увеличение сопротивления вторичной обмотки и возрастаиие на­
грузки, т. е. включение большого ЧflCJJa приборов, г1риводят к повы­
шению ЭДС Е"2, а следовательно, к уве.ничению потока Фо и МДС
iow 1 . Поэтому дJщ каждого трансформатора уr<азывается его номи­
нальная вторичная наrру:iка в омах или ,ю,шна;п.,ная мощность в
вольт-амперах. Но,�инальной наrрузкои трансформатора тока назы­
вается наибопьшее солротив.rуеннс, на 1юторое можно замыкать его
вторичную обмотку, нс выJывая, :увеличения поrреu,ностей выше до­
П)'СПl\1ых для соотв�тствуюшсrо класса точности.
Номинадьная нагрузка Zном и номинат,ная мощноеп, трансфор­
матора тока Sном связаны между собоi1 соотношением
2
s,JO'>f = 1�ном 2,юм·
ЗI!ачение /0 будет тем мсю,ше, чем выше ма1·нитная проницае­
мость '11атернала магнитопровода и чем меньше в нс�1 потери на ги­
стерезис и вихревые токи. При неизмениом значении Ф0 ток /о будет
уменьшаться с сокращением д.�ины магнитопровода и уве;1и1Jением
его сечения, так как при этом уменьшается магнитное сопрот11вление
магнитопровода.
Уменьшение 11аrнитной индукции также приводит к уменьшению
/ 0, поэтому в трансфор�1аторах тока значения индукции значительно
меньше, •Jc�1 в силовых трансформаторах, н составляют 0,05-0,15 Тл.
При неизменной нагрузке z2 и уменьшении нз,1сряемuго тока по­
грешности трансфорщпора увеличиваются из-за от1юсп·се.,1ьноrо уве­
личения намагни 11ивающеrо тока (рис. 3.8) .
.Магнитопроводы трансформаторов тока изготов.rуяются из тон­
кой листовой высо�<осорпюй трансформаторной стади, а для особо
1
iz,% t
7,0 100
0,8
0,Б
0,'10,Z
о
-0,Z
-O,'i-D,6
8D'
БD'
tos91z�t.O
бz,
';{)'
""0,Б
zu'
oL-,o.1-a,z,--::�D�;f��Q�.Б;;;�I;;/�I;,;;нcL..,
2 2 1
i'
�oif'
l
·0,8
-1,0
Рис. 3.8. J<ривые погрешностей транс­
форматора тока при разных cos q,2.
Рис. 3.9. ИзмсритеJ1ьные клещи.
50
то чных трансформаторов - из железоникелевых сплавов тнnа nep•
ll!аллоя. Для уменьшения nотерь на вихревые токи листы изот,ру·
ются друг от друга. Чаще всего nр щ1еняются магнитопроводы стер·
жневого и круглого (кольцевого) типов.
Для уменьшения (компенсации) тюrрешностей в трансформато­
рах тока используют искусственное подмагничивание магнитопровода
дополнительными полями до значения, при котором материал магни­
топровода имеет наибольшую магнитную проницаемость. Это при1юдит к относительноыу уменьшению намаrничивающеrо тока /0•
Практически ко�шенсация подмагничиванием осуществляется
вторичным током при прохождении его по допоJ1ннте.qьным обмоткам
или подмаr1111чнванием за счет потоков рассеяния. Такие 1рансфор­
маторы называются компенсированны:,1и.
В установках с большими тока.\1И короткого замыкания при не­
достаточно надежной конструкции трансформатора возможны его
механические и термические повреждения. ,\,lеханические поврежде­
ния rюJiучаются вследствие электродинамического взаимодействия
проводников с токами.
Э.�ектродинами 11еской стойкостью трансформатора тока называ­
ют отношение амплитуды тока, которую он может выдержать без
изменения своих механических и электрических свойств в течение
одного полупериода, к амплитуде номина:1ьноrо тока трансформа­
тора.
Термической сто;\костыо трансформатора тока называется отно·
шеиие действующего (среднеквадратнческого) значення тока, кото­
рый трансформатор ыожет выдерживать в течение l с без измене­
ния своих свойств, к действующе1у значению номинального первич­
ного тока трансформатора.
В установках с большими токами короткого замыкания приме·
няются трансформаторы тока с высокой термической: и электродина.
мической стойкостью.
На рис. 3.9 представлен переносный трансформатор тока в виде
клещеi'1. Она испо;н,зуется в тех с.�1учаях, когда необхощшо произво­
дить нзыерения без разрыва проводн»ка с измеряемым током. Магпи­
топровоi! трансформатора тока разъемныi'r (на шарнирах), благо­
даря чему он может охватывать провод, образующиii первичную об­
мотку. Для удобства измерения амперметр часто укреттдяется на кор­
пусе трансформатора. Точность таких трансформаторов невелика, но
достаточна i!ЛЯ ор1-1еитировочных измерений
В завнси,юсти от об:1асти применения измерительные трансфор­
маторы изготовляются стационарными, предназна•1енными для уста­
новки на открытых площадках распределительных устройств, стан­
ций и подстанций и в закрытых по��ещсниях, и переносными - для
испоJIЪзования в лабораториях. Стационарные трансформаторы, как
правило, имеют один предел измерения, а переносные - несколько
пределов. Например, переносныr, трансформатор тока типа И-54
1<ласса точности 0,2 имеет номинальные первичные токи 0,5; 1,0; 2,0;
5,0; 10,0; 20,0 н 50,0 А, вторичный ток 5А и номинальную нагрузt;у
0,4 Оы.
На рис. 3.10, а, б даны схема и внешнвй вид уюшерсат,1юrо
трансформатора типа У'ГГ-5М. Он имеет магн1попровод из пермал­
JJоя 1,1 две обмотки: вторичную (выводы Н 1 , 112 ) с номины1ьным то­
ком f2ном=5 А и первичную, состоящую из двух секций с номины1ь­
нымн токами 15 н 50 А. При измеряемых токах 100-600 А первич­
ная обмотка создается витками гибкого провода, п_роходящими через
4*
51
ок но n тра нсформаторе. Необходш,rое число nитков в этом слу,rае
должно быть таким, чтобы сохраняJ1ось постоянство значения l111oмW,.
Ло точности трансформаторы тока подразделяютс11 на десять
классов: 0,01; 0,02; 0,05; 0,1; 0,2: 0,5; 1; З; 5 и 10. Основные требо­
вания к трансформаторам тока установлены ГОСТ 7746-78Е и ГОСТ
23624-79.
,�I
Bamкll пepllllчнotJ otJNomKll
при токох 100-бООА
r й,-- �1
t'
1
J U2
1
J
1
1
'
l '\\Il\
J
� 111:
1
1
1
J
1
,,
L-
а)
о)
11'
1'
11,1
11т:1
Рис. 3.10. Трансформатор тока типа УТТ-5М.
а - схема; 6 - ьнешкиИ. внд.
3.4. ИЗМЕРИТЕЛЬНЫЕ ТРАНСФОРМАТОРЫ
НАПРЯЖЕНИЯ
Измерительные трансформаторы напряжения работают в режиме,
близком к хо.постому ходу, потому что ко вторичной обмотке транс­
форматора подкточают приборы с относительно большим внутрен­
ним сопротивлением.
На рис. 3.11 приведена векторная
диаграмма 1 р ансформатора напряже­
ния. Для большей наглядности диаграм­
ма построена n предположении, что
'IИСЛО витков перви•1ной и• 1 и вторИ'IНОЙ
ш� обмоток одинакова (в действитель­
ности w1 > и:2 ). Это позволяет заменить
векторы ,'\\ ДС со01ветству1ощими то!(а­
мr1, что обJ1еrчает рассмотреш,е причин
nозникнове1ч1я погрешностей трансфор•
матора.
Последовательность построения вск­
торrюi'r диаграммы трансформатора на­
пряжения от тока i2 1ю вторн•той цели
до тока i1 в перви•шой цепи трансфор ­
матора такая же, как п в трансформа­
торе тока.
ВЕ.'.кторы напряжений U2 на втори•1ной обмоп,е трансфор'1атора и ЭДС Е2
находят нз основании следующих урав­
нений:
Рис. 3.11. Векторная ди­
}
U2= i2(R+jX);
(3.2)
а�-рамма трансформатора
E2 =ll2 +i2 (R2 + jXJ,
напряжения.
52
где R. и Х - эквивалентные активное и реактиnное сопротивлении
приборов во вторИ'IНОЙ цепи; R.2 и Х2 - активное сопротивление вто­
ричной об'V!откн и его реактивное сопротивление, обусловленное по•
током рассеяния.
.
Вектор первичного напряжения U 1 получен путем сложения ПО·
вернутоrо на 180с вектора ЭДС Е2 с напряжениями на активном
сопротивлении R. 1 первичноi't обмотки трансформатора и его реактив•
uом сопротивлении Х 1 , обусловленном потоко,1 рассеяния
Так как
и1 =-Е2+ i1 (R.1 + iX1>•
i, =io-i2, а также учитывая (3 2), по,,учае;�:
И1 =-И2
+ io R1 + io i Х
1
-°12 (R1
+ R ) -·1
2
2
(Х 1 +Х2).
(3.3)
Из (3 3) следует, •1то вектор перnичноrо напряжения U 1 не равен
вектору nторичноrо напряжения И2, несмотря на то что было приня•
то w 1 =w2• Отличие напряжений V1 н И2, а следовательно, поrрсш•
ности напряжения vи и уrJювая l5u зависят от токов 1; и /� и СО·
протнвлениii обмотоr< трансформатора.
Наибольшее влияние на погрешности оказывает нагрузка во вто­
ричной цепи трансформатора.
1и, 0/о
/Ju
о,з
151
O,Z
10
0,7
о
�0,1
-0,2
-0,3
1
5'
70
"о'-"
""о"'
JeJ, ,,
о
-S'
�
,а
'fO,S,fA
q.5' --:о'
о,<9
ЗО�А
�
�
Рис. 3 12. Зависимость погрешностей трансформатора напряжения
от нагрузки при разных cos IJ)2На рис. 3.12 приведены типичные графики погрешностей транс•
форматора напряжения с номинальной мощностыо 50 В• А в зависн•
мости от мощности во вторичной цепи при разных cos IJ), т. е. при
разном характере нагрузки вторичной цепи. Начиная с некоторого
значения мощности, погрешности непрерывно уве:ш•�нваются. Во вто•
ричную цепь нужно включать такое количество приборов, чтобы ПО·
требляемая ими мощность нс превышала номинальной мощности
трансформатора, обычно �казыnаемой на его щитке.
Ток fo значите.1JЬ,ю меньше тока /2 и поэтому согласно (3 3) ока•
зывает на погрешности трансформатора относительно небольшое
влияние. Увеличивая ток / r,, повышают магнитную индукцию в маг•
нитопроводе до 0,6-1,0 Тл. что значительно больше, чем в транс•
форматорах тока. Увеличение маrн11тиой индукции позволяет при
53
заданном напряжении на вторичной обмотке снизить число витков
в обмотках трансформатора. В результате при неизменной площади
се•1ення обмоток мо,кно значительно увеличить сечение проводников
н уменьшить сопротиnления обr,,оток R 1 и R2 , при ЭТО'>t плотность
тока в проводниках обмоток уменьшится по сравнению с силовыми
трансфор'11аторами почти в 10 раз и составпт 0,1--0,3 Л/м м2 •
Магнитопроводы трш1сформаторов обычно изготовляют нз луч­
ших сортов кремнистой L"l'али Благодаря этому уме1:1ьшаются реак­
тивные соnрот1шления Х 1 и Х2, обу словJ1енные соответственно пото­
кам11 рассеяния первиqJЮЙ и вторичной обмоток трансфОр'1аторов,
и, i,,po\1c того, ) меньшаются ток
хо.�остоrо xo,:ta ,,, потери в ыаг­
ш1тоnроводе.
Согласно ГОСТ 1983-77Е 11
ГОСТ 23625-79
стщионарные
трансфор'dаторы напряжения де­
8
.r1>1тся на классы то•rности 0,2; 0,5;
А Х.-,---......+--�
V с z
1 и 3, а лабораторные - на клас­
сы 0,05. 0,1 и 0,2
Стационарные трансформато­
]JЫ иаттрнжения изrотовлнются на
1юм,1Нальные первнчные напряже­
шш до сотен киловольт при вто­
ричном напряжении 150, 100 н
HXJ/ УЗ В. Ном,1нальные мощ­
l!ости
составляют от 5 до
(}
1200 В-А
По внешнему виду и устрой­
ству трансфорыаторы напряжения
мало отличаются от силовых
Рис. 3 13. Схема устройства н
трансформаторов иа небольшие
Бключения трехфазного транс­
мощности. Лабораторные транс­
форыатора напряжения
форматоры чаще Eccro быоают
переносныю1 на несколько nреде­
лоn измерення
т
Для трехфазных цепей изго овляются трехфазные трансфор111а­
торы напря,:<ения (рис 3 13). На трех стержня, магннтоттроnода
располагаются три первичнt1е и три вторичные обмотки. ПерRичные
обмоткн присоеднняюгся к трехфазrюй цепи, к вывода\1 вторичных
об'11оток присое;щняются измерительные приборы
По виду охлажден11я трансфор"1аторы напряжения делятся на
сухие (для напряжений до 3 кВ) и трансформаторы с заливкой мас­
лом или нзоJшрующей массой (для напряжений 3 кВ и выше).
3 5. ИЗ!'t\ЕРИТЕЛЬНЫЕ ТРАНСФОРМАТОРЫ
ПОСТОЯННОГО ТОl(Л
ИзмеритСJ1ЫiЫе трансформаторы постояю-юго тока применяются
для измерения 0•1ень больших токов, обычно свыше 6 кА. Такне токи
встречаются, напр.�\lер, в алю\н1ниевой промышJiенности, н шунты
для них получаются весьма громоздЮl\{И н дорогими. Досто11нство\1
трансфор"1аторов постоянного тока явлнется безопасность их приl\Iе­
нения в цепях с высоким напряжением, так как вторичные обмотки
изолировш1ы от первичных.
54
Принцип действия измерительных трансфорlliаторов постояппоrо
тока существенно отлнчается от обы-чиых измерительных трансфор­
маторов.
Рис. 3.14. Принципиальная
схема измерительного транс­
форматора постоянного то­
J{а.
На рис. 3.14 изобр!111<ена принципиалъная схема такого транс­
форматора. Он состоит из двух совершенно одинаковых кольцевых
магю1то11роводов / и 1/, изготовленных из матер11ала с высокой маг­
нr1тной проницаемостью (например, из пермаллоя). Первичные об­
мотки w1 наматывают на оба магнитопровода в одном направлении,
соединяют последовательно II подключают к источнику измеряемого
постоянного тока lx . Обычно перв11<1нымн обмотками служит токо­
несущая шина, продетая в отверстия магю1топроводов; в этом случае
w 1 = 1. Вторичные обмотки w2, намотанные на магнитопроводах в
противоположных направлениях, соединяют 11ос.,1едоватет,ио и через
амперметр переменного тока подключают к вспомогательному исто•1нику переменного напряжения.
На рис. 3.15 приведена кривая намагничивания магнитопроводов
Ф=F(lw), где Ф-маrиитный поток. На эт ой кривой точкой А обо-
Ф
А
т •*• ==-----,в
:
)
J
1
J
17
rw
Рис. 3.15. Кр1шая намаrии•тва­
ння магнитопроводов транс­
форматора постоянно1·0 тока.
Рис. 3.16. Характер кривой из­
менения тока во вторичных об­
мотках трансформатора посто­
янного тока.
значсно значение потока Ф-, соответствую щего МДС fx w 1, обуслов­
ленной нзмеряемым током l x ,
Измсряемы1i ток lx, протекая по первнчной обмотке, создает в
обоих магнитопроводах одинаково направленные и равные магнит­
ные потоки ф __ Пусть в данный момент временн переменный ток
/2, проте1<ающий по обмоткам w2, имеет такое напраDление, что по­
ток Ф в магнитопроводе /, созданный МДС I2w2, совпадает по на­
правлению с потоком Ф_, тогда в магнитопроводе 11 эти потоки бу-
55
дут направлены в противоположны е стороны, так как обмотки w2
включены встречно.
Несмотря на то что в магнитопроводе / МДС измеряе"1оrо тока
/ xW1 и пере'11енноrо тока /2-ш 2 совпадают, практического увеличения
магнитного потока в магнитопроводе нс происходит, так как маrни•
топровод уже бьт насыщен постоянным магнитным потоком Ф-, при
этом ЭДС, наводимая во вторичной обмотке первого маrнитопрово•
да, равна:
dФ
e=-w2-- =0.
dt
Иной процесс будет иметь место в обмотке w2 второго ма,·нито•
провода. При возрастании тока / 2 в обмотке рабочая точка А пере­
мещается по кривой намагничивания влево. Пока магнитопровод
остается насыщенным (примерно до то•1ки В), увеличение тока не
вызывает заметного изменения магнитного потока. Однако как толь­
ко точка А переместится в область 0В, т. е. МДС l2w 2 станет близ­
кой к МДС /,.w1 , магнитный поток в магнитопроводе начнет резко
уменьшаться, и в обмотке w2 пояnитсн ЭДС, противодействующая
дальнейшему увели •1 ению тока /2. В резулътате рост тока /2 почти
по.:�ностью прекращается (рис. 3.16), а его максимальное значение
может быть определено из уравнения
f2maxW2 � fx W1 ,
или
(3.4)
Так как серде<Jник 1 насыщен, то его обмотка w2 на ток /2 прак•
тнчески не влияет.
В течение с.JJедующеrо полупериода, когда переменный ток, а
следовательно, и наведенные им потоки Ф~ изменят свое направле­
ние, магнитопроводы / и // поменяются ролями.
Отметим, что если форма кривой намагничивания бш1зка к
идеальноН прямоугольной (кривая ОтА на рис. 3.15), активное со­
противление цепи переменного тока мало, а переменное напряжение
достаточно велико, то форма кривой тока 12 очень близка к пряно­
уrольной и максимальное его зна•1ение согласно (3.4 ) почти не зави­
сит от напряжения и частоты источника питания. При прямоугольной
форме кривой тока /2 его среднее значение равно максимуму. Сред­
нее зна<Jение тока измеряют амперметром выпрямительной системы.
Отечесrвенной промышленностью выпускаются трансформаторы
постоянного тока типа И-58М на номинальные первичные токи от 15
до 70 кА. Они имеют класс точности 0,5.
З 6. ЛАIЮРАТОРНАЯ РАБОТА № 1.
ПОВЕРКА ИЗМЕРИТЕЛЬНЫХ ТРАНСФОРМАТОРОВ ТОКА
Погрешность коэффициента трансформаuии и угловую погреш­
ность трансформатора тока можно определить при помощи диффе­
ренциального прибора, например, типа АТТ, схема которого дана на
рис. 3.17, а.
Первичные обмотки поверяеl\!ОГО ТА" и образцовою ТАо тран�форматоров соединены пос,1едовательно, и по ним проходит ток l1.
56
Последовательно со вторичной обмоткой образцового трансформато­
ра соединена первичная обмоп<а образцовой катушки М взаимной
индуктивности, вуоричная обмотка которой замкнута на реохорд аб.
Вторичный ток l02 образцового трансформатора проходит по конту­
ру И 10ЛБ'ВД/120• Вторичный ток /�2 поверяемого траисфор,1атора
проходит по контуру И,�ДВБ'БИ2х Таким образом, по резистору Пвд протекает ток Л/, равный
разности токов ix2 и io2. Номинальные значения коэффициентов транс­
формации образцового II поверяемurо трансформаторов выбирают
одинаковыми, поэтому ix2�io2, а Лl<.<i:<2Ha векторной диаграмме (рис. 3.17, 6) даны векторы этих трех
токов. На этой же диаграмме дан вектор тока iоз вторичноi'r обмотки
катуnши взаимной ипдуктишюсти. Так как ЭДС, наведенная во вто-
!}___
с
п
т
io
1
io2Rд
п' r.,:..-"....,__.....,
IPJRб с' • io�
6)
А
Рис. 3.17. Поверка трансформатора тока.
а - nршщипналы,ая схеыа ш1фференцигльноrо прибора; 6 - векторная дна­
трамыа.
ри•rной обмотке катушки взаимной индуктивности, отстает по фазе
от тока 1�2 на угол, равный n/2, а сопротивление Э'!'ОЙ цепи активное,
то ток i00 также отстает по фазе от тока io2 на угол n/2.
Считая поrрешиости образцового трансформатора равными нулю, угод О х , образованный векторами токов ix2 и i02, можно рас­
сматривать как угловую погрешность поверясмОr(! трансформатора
тока. Так как угловая погрешность мала, то ток l x2 можно считать
равным проекции его вектора на направление вектора тока /�, т. е.
lx2 cos б х :=:::: l x2 = /02 Л/ CO,S ф.
Отсюда погрешность коэффициента трансформации трансформа­
тора в процентах
+
(3.5)
57
Из этой же векторной диаграммы с достато1f!lой �ю nо­
.ll}'Чиы
tg бх = Л1 sin ,t;//02 •
Так как 6 х мал, то 6 x ""Lgбx и, следовательно,
бх :=::: Л/ sin ф// 02 •
Выражая i'ix не в радиана>., а в минутах, получаем:
Л/ sin 'lj,
Л/ sin ф
" = 3440 ----'-- = -----'-Ux
(3.6)
0,00029
1 02
f0 2
Для определенttя погрешностей трансформатора движки прибо­
ра а' и Б' перемещают так, чтобы получить нулевое зна,1ение тока в
сравнивающем устройстве СУ, в качестве к<Уrорого используется в11б­
рационный гальванометр. В этом случае вектор падения напряжения
на резисторе Rвд будет равен сумме векторов падений напряжений
на сопротивлеиинх Rл н Rб (рис. 3 17, а).
Так как падение напряжения на сопротивлении резистора Rвд
совпадает по фазе с током лi, а падение напряжения на сопротив­
лении резистора Rд совпадает по фазе с током /�, то Ln.'m' с'=
=Lnmc=L'lj,, откуда
102 Rд.
cos'lj, =
Л/ Rвд
Подставляя полученные значения в (3 5) и (3 6), полr�аем вы­
ражения для погрешности коэффициента трансформации в процентах
и для }ГЛОВОЙ погрешности в минутах.
ЛН 02 Rд
Rд
'Ух = -�-100=-- НЮ·
(3.7)
Лllо2Rвд
б..,
=
Rвд
Л //оз Rб
О ' 00029Л//02 Rвд
•
Rб
= 11 Явд •
(3-8)
l
l оз
е
постоянны коэффициент
.
l1
гд k = 0 • ООО 2 9 -102 Полученные выражения показывают, что погрешности поверяе­
мого трансформатора определяются отношением сопротивлений
RдlRвд tt R.б/RвдСопротнвJ1ею1я резисторов R6. Rд и Rвд и взаимная индуктив•
ность 1,атушкн М выбира1отся с таким расчетО\!, чтобы на шкалах,
по которым опредедяют положение движков а.' и Б', можно было
непосредственно отс•IИтывать значения вещ1,шн Vx и б х
Сопротивление нагрузки поверяемого трансформатора тока оп­
реде,1яется суммои сопротивлений регулируемого резистора R2 и
части реохорда ББ'. Падение напряжения на резисторе R вд прене­
брежимо ма.10 по сравнению с падением напряжения на резисторе
R2, так как д/�lх2
Реохорд наматывают из проволоки большого сечения, и поэтому
сопротивление части реохорда ББ' 011енъ мало. Следовательно, в пер•
BO\f приближении можно считать, что нагрузка трансформатора ТА"
оnре.:�.еляется сопротивлением резистора R2.
08
Задание
1. Ознако>лнться с приборами, необходимыми для работы. За­
писать иомина.r1ьные значения величин, системы, к.qассы точности и
заводские номера.
2. Проверить возможность применения имеющейся аппаратуры
в данной схеме.
3. Собрать схему и показать ее дл» проверки руководителю.
4. При различных значениях первичного тока в преде,1ю< 20100 % номинального при номинальном сопротив;1ен11и вторичной цепи
трансформатора определить погрешность коэффициента трансформа­
ции и угловую погрешность трансформатора тока.
5. Определить погрешности трансформатора при первнч�юм токе,
равном 50 % номинального, 11 сопротивлении нагрузки трансформа­
тора тока R2, составляющем 20, 50, 100, 150 и 200 % но�шнальноrо
значения.
Та б л иц а 3.1. Резу.qьтаты измерений и расчетов
№ наблюдения
/1, А
Соnротнn.�с, ние
наrруз�щ транс­
форматора. Ом
Поrрсшностн
'Vx, %
6. По полученным данным построить кривые погрешности тран­
сформатора:
а) V x =F(/ 1 ) u б ,, =F(/ 1 ) при номииа.�п,ном значении сопротивле­
ния R2;
б) y ,. =F(R2) и б ,, =F(R2) при токе /1 , равном 50 % номиналь­
ного значения.
7. Дать закточею1е о поверяемом трансформаторе.
8. Составить отчет по требуемой форме.
ГЛАВА ЧЕТВЕРТАЯ
ОБЩИЕ СВЕДЕНИЯ ОБ АНАЛОГОВЫХ ЭЛЕl(ТРО­
ИЗМЕРИТЕЛЬНЫХ ПРИБОРАХ
4.1. ОБЩИЕ ВОПРОСЫ
Аналоговы.ми измерительными приборами называют
приборы, nоI<азания которых яв.пяются непрерывной
фующией изменений измеряемой величины. Ана.поговый
э.nе1произмернтедьный прибор - это, в первую очередь,
поназывающий прибор, т. е. прибор, допускающий от•
59
считывание nо1шзаний. Для этого у всех аналоговых
электроизмерительных приборов име ется отсчетное уст­
ройство, состоящее из шкалы, расположенной на цифер­
блате прибора, и у1{азателя.
Указате.пь отсчетного устройства жестко связан с по­
движной частью измерительного механизма, осущест­
ВJ1яющего обычно преобразование измеряемой э.r1ектри­
чес1юй ве.пичины в угловое перемещение подвижной час­
ти, а следовательно, и у1<азате.1ш.
В измерительном механизме поворот подвижной час­
ти осуществляется под действие�1 возникающего в меха­
низJ.1.�е вращающего момента. Значение вращающего мо­
мента пропорционально измеряемой эJ1е1<трической ве­
личине. Для того чтобы обеспечить однозначную связь
между углом поворота подвижной части и значением
ИЗ'1еряемой ве.пичины, необходимо в каждом аналоговом
прибuре создавать противодействующий момент, пропор­
ционаJ1ьный yrJiy поворота подвижной части механизма.
Характер движения подвижной части, а следова­
те.1Jьно, и указателя к установившемуся положению игра­
ет в приборах существенную роль, определяющую быст­
родействие прибора. Поэтому во всех аналоговых прибо­
рах предусмотрены различные устройства по созданию
оптимального успокаивающего моvrента.
Наличие подвижной части в измерительном механизме
требует применения специальных опорных устройств,
создающих относите.1Jьно малый момент трения.
Таким образом, независимо от назначения аналогов.:>­
го элс1произмерите11ьного прибора и от разновидности
применяемого в нем измерительного механизма любой
прибор содержит общие для всех аналоговых приборов
узJ1ы и эJ1ементы. Это - отсчетное устройство, устройст­
ва по созданию противодействующего и успокаивающсrо
моментов, опорное устройство. Кроме того, общими д.1я
всех аналоговых прпборов являются и техничссюrе тре­
бованпя, определяемые соответствующими ГОСТ. Ниже
рассматриваются техничес1ше требования к ана.1щ·овым
приборам, а также констру1щни и особенносrи работы
всех перечисленных выше устройств.
42 ТЕХНИЧЕСl(ИЕ ТРЕБОВАНИЯ
Общие технические требования ко всем ана.1Jоrовыч
и цифровым приборам, а также 1< мерам электричесrшх
величин и измерительным преобразователям сформу.чи60
рованы в ГОСТ 22261-76. Следует отметить, что техниче­
ские требования к электроизмерительным приборам, вы­
пущенным до 1981 г., формулировались в ГОСТ 1845-59.
В настоящее время этот ГОСТ отменен.
На основании ГОСТ 22261-76 разработаны и введе­
ны в действие частные ГОСТ на отдельные виды эле1<т­
роизмерительной аппаратуры, например ГОСТ 8711-78
«Амперметры и вольтметры», ГОСТ 8476-78 (Ваттметры
и варметры», ГОСТ 8039-79 «Фазометры» и т. д. Госу­
дарственные стандарты на отдельные виды аппаратуры
устанавливают различные классы точности прпборов.
Та1<, ГОСТ 8711-78 для амперметров и вольтметров уС'lа­
навливает следующие классы точности: 0,05; 01; 0,2; 0,5;
1,0; 1,5; 2,5; 4,0 и 5,0. Кроме того, разрешается выпуск
амперметров и вольтметров класса точности 0,3.
Классы точности приборов устанавливаются по ос­
новной приведенной погрешности. Наибо.1Jьшее численное
значение основной приведенной погрешности прибора
каждого данного класса не должно превышать численно­
го значения этого класса. Например, для прибора 1<ласса
0,2 численное значение наибольшей: основной приведен­
ной погрешности не должно превышать ±0,2 % .
Кроме того, в ГОСТ для каждого данного 1<ласса
точности прибора регламентируются погрешности от ва­
риации показаний и изменения показаний прибора от
различных внешних факторов (на�<лон прибора, темпера­
тура окружающей среды, внешние магнитные и электри­
ческие поля и т. д.).
Требования к электрической прочности и zопротивле­
нию изоляuии между изолированными от корпуса по
постоянному току электрическими uепями приборов ус­
танавливаются соответствующими ГОСТ. Кроме того,
регламентируется время успокоения подвижной части
приборов.
Время установления показаний, обусловленное вре­
менем успокоения подвижной части, у абсолютного
большинства аналоговых приборов не должно превы­
шать 4 с. Это значит, что с момента пGдачи измеряемой
величины на вход прибора, или с момента изменения
этой величины, установившееся положение указателя от­
счетного устройства наступает не более чем через 4 с.
Исключение составляют термоэлектричесю-rе н эле1,тро­
статические приборы, для которых наибольшее вре;\1Я
ус11:11-1uнления показаний не превышает 6 с.
бl
Т а б л и ц а 4.1
Условные обозначения приборов
На11ме11ование
Прнбор магнитоэлектрический
с подвижной рамкой
J]оrометр
скнй
маrнитоэлектрнче-
о
о
Прибор электромаrнитиыi1
Лоrометр электромагнитный
Прибор электродинамический
Прибор ферродинамическнй
Логометр ферродннамический
Прибор индукцишшы1,
Прибор электростатический
Прибор магнитоэлсктрнчеекий
с выпрямителем (выпрямн­
тельныi'r прибор)
62
т_1._
Продолже,ше табл. 4.1
Наименование
Прибор магнитоэлектрический
с электронным преобразова­
телем в измерительной цепи
(электронный прибор)
о
Прибор маrнитоэлектрическ11й
с неизолированныы ·rермо­
(термо­
преобразователем
электрический прибор)
�
Ток постоянный
Ток переменный (однофазный)
Ток постоянный и переменный
Ток трехфазный перемен,1ый
(общее обозначение)
l..
Прибор применять при верти­
кальном положении шкалы
Прибор применять при гори­
зонтальном положении шка­
лы
I(ласс точности прибора,
пример 1,5
на­
l,J
f,5@
V
Налряже11ие
испытательное,
например 2 кll
Магнитная ю-IДукция, выра­
женная в милJrнтесJ�ах (на­
пример, 2 мТл), вызываю­
щая нзыен<?ние показаний,
соответствующее обозначе­
нию класса точное, и
Шит стаJIЬИОЙ ТОJIЩJШОЙ, на­
пример, З мм
Шит иеста,%1юi\ любой то.1щи­
иы
Щит J!Юбой ТОJIЩИНЫ
Fe3
I\Fe
FeNFe
63
В соответствии с требованиями ГОСТ аналоговые по­
казывающие приборы должны выдерживать нагрузху
током или напряжением, равным 120% конечного знач�­
ния, в течение 2 ч. Регламентируются таю!{е кратковре­
менные (ударные) перегруз,ш приборов током и напрн­
женпем. Так, для амперметров классов точности 0,5-5,0
предусмотрена .возможность лерегрузrш то1<ом, равным
l О lном, в течение 0,5 с.
Для всех приборов по значениям климатичес1шх и
механических влияющих величин ГОСТ 22261-76 уста­
навливает семь различных групп. Регламентируются
значения климатических и механических величин для
каждой группы приборов как при рабочих условиях при­
менения, так и при транспортировании и хранении при­
боров (предельные условия). Так, четвертая группа
средств измерений имеет следующие r<лиматические ра­
бочие условня применения: нижнее значение температу­
ры окружающего воздуха -10° С, верхнее +40° С, наи­
большая относительная влажность воздуха 90% при
температуре окружающего воздуха +зо0 с I! атмосфер­
ное давление 86-106 кПа.
Принцип действия прибора, вою10жность его рJ;1боты
в тех или иных условиях, возможные предельные по­
грешности прибора могут быть установлены по усло1,ным
обозначениям, нанесенным на циферблате nрибор,1. Ви­
ды условных обозначений установлены ГОСТ 23217-78,
действующим с I ннварS1 1980 г.
Примеры некоторых условных обозначений прнведе­
ны в таб.11. 4.1.
4.3. ОТСЧЕТНЫЕ. УСТРОЙСТВА
Выше отмечалось, что отсчетное устройство средства
измерения обязательно имеет шкалу, нанесенную на ци­
ферблат прибора. Технические требования к цифербла­
там и шкалам приборов установлены ГОСТ 5365-73.
На шкалу (рис. 4.1) наносятся отметки, обычно в ви­
де короткой вертикальной черты, соответствующие неко­
торым значениям измеряемой величины. Интервал меж­
ду двумя соседними отметками шкалы называют деле­
нпем шкалы. Отметки шкалы, у которых проставлены
числа (на шкале на рис. 4.1 это числа О; 2; 4; 6; 8 и 10),
называют числовыми отмет1<ами шкалы. Шкалы могут
быть равномерными (деления постоянной длины) и не64
равномерными (деления непостоянной длины). На рис.
4.1 изображена неравномерная шкала. Наименьшее зна­
чение измеряемой величины, указанное на шкале, назы­
вается начальным значением шкаJ1ы Хв. В нашем случае
(рис. 4.1) х8 =0. Наибольшее значение измеряемой ве­
Jiичины, указанное на шкале, называют конечным зна•
Рис. 4.1. Шкала прибора с оп­
тичесrшм отсчетным устройст­
вом.
6
, 1 'о\
1
10
В
1 , 1, 11
чением шкалы Хн. Для шкалы, изображенной на рис. 4.1,
хн= 10. По шкале прибора можно определить диапазон
показаний прибора и диапазон измерений прибора. Диа­
пазоном показаний называют область значений шкалы,
ограниченную конечным и начальным значениями шкалы.
В рассматриваемом случае диапазон показаний равен
0-10.
Область значений измеряемой величины, для которой
нормированы допускаемые погрешности средства изые­
рений, называют диапазоном измерений. Обычно пrи
равномерной шкале диапазон измерений и диапазон 1101<азаний совпадают. Однако при неравномерной шкале
диапазон показаний не совпадает с диапазоаом измере­
ний. Для определения диапазона измерений на шкалах
таких приборов обычно ставят точку в начале и конце
диапазона измерений, если наибольшее зна•1ение изме­
ряемой величины диапазона измерений не совпадает с
1<0нечным значением шкалы. На шкале, изображенной
на рис. 4.1, диапазон измерений равен 2-10.
Наименьшее значение диапазона измерений (в нашем
случае числовая отметка 2) называют нижним пределом
измерений, а наибо.r�ьшее значение диапазона измере­
ний - верхним пределом измерений. На рассматривае•
мой Ш1<але верхний предел измерения совпадает с конеч­
ным значением шкалы и равен 10.
Отсчет значения измеряемой величины по шкале при­
бора производится с помощью указателя. Различают два
вида указателей: у1<азатель, представляющий собой
стрелку, конец которой выполнен в форме, обеспечива­
ющей отсчет показаний с необходимой точностью, и
световой указатель n виде Л)"Iа света, образующего на
шкале световое пятно с индексом, по 1юторому произnо5-970
()5
дят отсчет nоказаний. Требования к фо,?ме и размерам
указывающей части стре.тюк и индексов световых указа­
телей установлены ГОСТ 3051-69.
В nриборах со световым указателем на подвижной
части измерительного механизма устанавливается не­
большое зер1<альце. Луч света, создаваемый обычной ми­
ниатюрной лампочкой накаливания с помощью nростей­
шей оптики, отражаясь от зеркальца nодвижной части,
nопадает на узкую по.rюску матового стекла, расnоло­
женного на циферблате под шкалой, и образует световое
пятно с индексо'v! нитевидного типа (рис. 4.1). При пово­
роте nодвижной части nоворачивается жестко скреплен­
ное с ней зеркальце и, следовательно, nеремещается под
шкалой отсчетноrо устройства световое nяrно с индек­
сом, указывая значение измеряемой величины.
В nриборах с уr<азателем в виде стрел1ш, жестко
скреnленной с подвижной частью измеритет,ноrо меха­
низма, отсчет зна•1ения измеряе:.юй величины произво�
а)
Рис. 4.2. Отсчетные устройства стрелочt1ых
приборов.
а - с к;ш,ювпдной cтpem<oll, 6 - с ножевой стрел­
коfi. в - со L-тержнево!\ стрелкой.
➔
Рис. 4 3. Отсчетное устройство с зеркальной
шкало11.
дится no положению указывающей части стрелки у wка­
J1ы nрибора. Форма указывающей части стрелки должна
обесnечивать отсчет показаний с необходимой точно­
стью.
В зависимости от формы указывающей части стрелок
наиболее расnространенными стреш<ами являются кли­
новидные (рис. 4.2, а), ножевые (рис. 4.2, 6) и стержне­
вые (рис. 4.2, в).
В лабораторных приборах повышенных классов точ­
ности при исnользовании указателей в виде стр�.1rш,
обычно ножевого тиnа, для уменьшения погрешности
отсчета от параллакса, возникающего из-за того что угол
66
зрения экспериментатора относительно плос1<0сти шкалы
прибора отличается от прямого, применяют специаль­
ные приспособления.
Наибольшее распространение получили так называе­
мые отсчетные устройства с зеркальной шкалой (рис.
4.3).
На циферблате 1 под шкалой устанавливается на
всю длину шкалы узкая полоска зеркала 2. Эксперимен­
татор перед проведением отсчета совмещает отражение
стрелки в зеркаде с самой стрет<ой 3. Только после это­
го, т. е. после устранения параллакса, произподится от­
счет по шкале прибора.
4 4. УСТРОАСТВА ДЛЯ СОЗДАНИЯ
ПРОТИf:ЮДЕАСТВУЮЩЕГО МОМЕНТА
Противодействующий момент в аналоговых измери­
тельных приборах создается в большинстве случаев дву­
мя способами - с помощью противодействующих пру­
жин и растяжек.
Противодействующие пружины выполняются в виде
спирали из бронзы по ГОСТ 9233-79. Один конец спи­
ралыюй пру:жины, внутренний, прш<репляется 1< по­
движной части измерительного механизма, а другой,
наружный, - к неподвижной части прибора. Таким об­
разом, вращающий момент, возникающий в из1\1еритель­
ном механизме, закручивает противодействующую пру­
жину до тех пор, пока вращающий момент не будет
равен противодействующему моменту. Чаще всего для
создания противодействующего мо'v!ента применяют не
одну, а две пружины, устанавливая их с разных сторон
подвижной части измерительного механизма. В случае
применения двух спиральных пружиil последние обычно
используются также для подведения тока в подвижную
часть прибора.
Растяжки (ГОСТ 9444-74) представляют собой ме­
талличес,ше ленточки шириной от 0,08 до 0,35 мм и тол­
щиной от 0,01 до 0,04 мм. В качестве материала при из­
готовлении растяжек используются разли<шые виды
бронзы, платины, а также кобальт-никель-хромовый
сплав. Обычно используются две растяжки, укре11-11яе­
мые с двух сторон подвижной части (см. рис. 5.14). Та­
ким образом, растяж]{И не тол1,ко создают противодей­
ствующий момент при повороте подвижной части nод
5•
67
действием вращающего момента, но и укрепляют (рас­
тягивают) подвижную часть. При применении растяжек
нет необходимости в спещ1альных опорных устройствах
(кернах 1 , подпятниках), которые нужны при использо­
вании противодействующих пружин.
Наличие двух растяжек позволяет использовать их и
для подведения тока в подвижную часть измерительного
механизма.
В реальных приборах одна из растяже1<, так же как
и внешний конец одной из спиральных противодейстну­
ющих пружин, прикрепляется не к неподвижной части
прибора, а к специальному винту, укрепленному на кор­
пусе прибора и называемому корректором. Поворот
корректора на некоторый угол в ту или иную сторону
позволяет изменять начальное положение подвижной
части прибора и тем самым устанавливать у1<азатель
выключенного прибора на нулевую отметку. Применение
растяжек, изготавливаемых на основе современной тех­
нологии, ПОЗВОJ!ЯеТ ИСI{ЛЮЧИТЬ трение в опорах и повы­
сить чувствительность измерительных механизмов.
4.5. YCTPOFICTBA ДЛЯ СОЗДАНИЯ УСПОКАИВАЮЩЕГО
МОМЕНТА
Подвижная часть, а следовательно, и указатель от­
счетного устройства занимают вполне определенное по­
ложение, соответствующее значению измеряемой величи­
ны то.r�ько тогда, ((ОГда вращающий момент равен
моменту nротиводействующе�1у. При любом изменении
измеряемой величины изменяется вращающий момент и,
следовательно, нарушается равенство между значениями
вращающего и противодействующего моментов. Подвиж­
ная часть измерительного механизма под действием раз­
ности названных моментов начнет перемещаться в ту
или иную сторону до тех пор, пока вновь не наступит
равенство между значениями вращающего и противодей­
ствующего моментов. Время, необходимое для этого, на' Керн представляет собой небольшой стержень (диаметр 0,50,75 мм, длина 3-7 мм) из спеuиа11ьноi1 сrали. Од1ш конец керна,
сопрЮ<асающийся с подпятником, имЕет коническую форму. Под­
пятник, имеющий коннчес1<0е углу бление для керна, изготавливает­
ся из твердого материала, например агата или корунда. I<ери ук­
репляется на подвижной части, а подпят1mк - на неподвижной
опоре.
68
зывают временем успокоения подвижной части прибора.
Для обеспечения требуемого времени успокоения
подвижной части в аналоговых приборах применяют
различные устройства, создающие успокаивающий мо­
мент. К ним относятся воздушный, магнитоиндукцион­
ный или жидкостный успокоители.
Воздушный успокоитель (рис. 4.4, а) применяется,
главным образом, в приборах старых разработок, имею·
:1Шfs
.3
•·. ;:,
3
б)
.
f.
z
�
� Ь)
Рис. 4.4. Успокоители.
а - воздуш11ыi!; 6 - магнитош1дукционныi1; в - жидкост11ы/\.
щих подвижую часть на оси с противодействующими
пружинами. Он представляет собой закрытую камеру 1,
внутри которой перемещается при движении подвижной
части легкое алюминиевое крыло 2, жестко укрепленное
на оси 3 подвижной части измерительного механизма.
Между алюминиевым крылом 2 и корпусом 1 имеется
небольшой зазор. При движении крыла воздух переме­
щается из одной части камеры в другую, создавая успо­
каивающий момент, способствующий оптимальному
успокоению подвюкной части прибора.
Магнитоиндукционный успокоитель (рис. 4.4, 6) состо­
ит из неподвижного постоянного магнита / с магп:по­
проводом 2 (возможно применение нескольких постоян­
ных магнитов) и крыла успокоителя 3, жестко скреп.,1ен­
ного с подвижной частью прибора. Крыло успокои геля
выполнено из немагнитного материала, обы•шо алюми­
ния.
При движении подвижной части, а следовательно, и
крыла успокоителя в последнем при пересе•1ении поля
постоянного магнита наводятся вихревые токи. Взаимо­
действие этих токов с полем постоянного магнита созда­
ет успокаивающий момент.
Магнитоиндукционный успокоитель по конструкции
проще воздушного успокоителя и более удобен при pery69
лировке успокаивающего момента. Однако применение
магнитоиндукционного успокоителя возможно лишь в
приборах, где поле постоянного магнита не будет оказы­
вать существенного влияния на работу измерительного
механизма.
)Кидкостный успокоитель применяется, главным об­
разом, в приборах, имеющих малые размеры по высоте,
однако в последнее время его стали применять и в при­
борах обычного габарита. Жидкостный успокоитель
(рис. 4.4, в) состоит из двух дисков. Диск / уhреnляется
па подвижной части прибора, а диск 2 - на неподвиж­
ной части. Зазор между дисками обычно составляет
0,1-0,15 мм. Между дисками заливается специальная
маловысыхающая кремнийорганическая жидкость 3.
Жидкость в зазоре удерживается поверхностным натя­
жением. Для предотвращения вытекания жидкости из
зазора поверхности дисков, соприкасающиеся с жидко­
стью, тщательно полируются.
Благодаря определенной вязкости применяемой жид­
кости при движении подвижной <1асти, т. е. nри враща­
тельном движении диска / относительно дцска 2, из-за
трения между слоями жид1<ости возникает успокаиваю­
щий момент.
Жидкостный усnокоитеJJь применяется, главным об­
раЗО!v!, в приборах, в которых подвижная часть укрыIЛе­
на на растяжках. Растяжка 4 проходит через небольшие
отверстия, сделанные в дисках.
4.6. ГАБАРИТНЫЕ РАЗМЕРЫ ПРИБОРОВ
Габаритные размеры аналогового прибора определ я­
ются габаритами его корпуса. В соответствии с ГОСТ
5944-74 корпуса всех щитовых аналоговых как пою1зы­
вающих, та�< и регистрирующих приборов подразделя­
ются на четыре различных типа.
Типы корпусов от.11ичаются друг от друга коифпгура­
цией и размерами фланца (лицевой части прибора) и
формой углубленной части, в которой расположены из­
мерительный механизм и измерительная цепь прибора.
На рис. 4.5, а-г изображены фланцы всех четырех
типов корпусов. Конфигурация и расположение относи­
тельно фланца углубленной части корпуса показаны
штриховой линией.
К корпусам первого типа относятся корпуса с квад70
ратным фланцем и tфуrлой углубленной частью, распо­
ложенной по центру фланца (рис. 4.5, а).
В соответствии с ГОСТ предусматриваются ряд раз­
.пичных размеров В (Bru;n=20 ММ, Втах=200 мм) и СО·
ответствующие каждому размеру В диаметр и длина
углубленной части J(Орпуса.
К корпусам второго типа относятся корпуса с прямо­
угольным фланцем и прямоугольной углубленной частью
(рис. 4.5, 6). Предусмотрено достаточно большое 1<0ли­
чество типоразмеров корпу­
сов данного типа, причем
J(аждому данному размеру
В соответствуют вполне оп­
ределенный размер Н н га­
баритный размер углублен­
ной части корпуса. Мини­
о)
мальный размер В и Н мо­
а)
жет быть 20 мм, а маиси­
мальный 480 мм.
- --1--\-- -:t:
К rюрпусам третьего ти­
\J,./
па относятся корпуса с пря­
моугольным фланцем, одна
ll)
г)
из сторон которого должна
быть равна или кратна
30 мм, и прямоугольной уг- Рис. 4.5. Габаритные размеры
лубленпой
частью (рис. приборов.
4.5, в). Приборы, имеющие
такой корпус, обычно называют узкопрофильными. Пре­
дусматривается несколько типоразмеров В: В т,п=80 мм;
Втах = 240 мм. Размер Н равен ЗОХп мм, где п-любое
целое положительное число.
К корпусам четвертого типа относятся корпуса с пря­
моугольным фланцем и r<руглой углубленной частью,
смещенной к нижней стороне фланца (рис. 4.5, г): Вт;п=
=100 мм; Втах = 160 мм; Нтп;,.=90 мм; Нтах =140 мм.
Габаритные размеры переносных аналоговых прибо­
ров указываются в технических условиях на каждый
данный прибор.
rr=t=d­ ,--k
ccft в
ГЛАВА ПЯТАЯ
ИЗМЕРИТЕЛЬНЫЕ МЕХАНИЗМЫ ПРИБОРОВ И
ИХ ПРИМЕНЕНИЕ
5 1. ОБЩИЕ СВЕДЕНИЯ
Все эле1<тромеханичес1<ие приборы состоят из из\lе­
рительной цепи и измерите.'!Ьноrо механизма. Стру1<тур­
ная cxei-.1a элеr<тромеханичес,юrо прибора по1<азана на
рис. 5.1.
Измерительная цепь является преобразователем из­
меряемой величины х в лекоторую промежуточную
элеитрическую величину у, функционально связанную с
величиной х, т. е. y=f 1 (х). Электричес кая величина у,
х
измеритмь- У измеритель- СУ Рис. 5.1. Структурная схема
ная цепь
· нь,й механизм
9лектромеханического прибора.
которой является ток или напряжение, непосредственно
воздействует на измерительный механизм (входная ве­
личина механизма).
Измерительный механизм является преобразователем
подведенной 1< нему электрической энергии в механиче­
скую энергию, необходимую для перемещения его 1ю­
движной части относительно неподвижной, т. е. а=
=f2(y)
У большинства механизмов подвижная часть имеет
одну степень свободы, т. е. может поворачивагься вокруг
неподвижной оси на yro.� а или, значительно реже, со­
вершать линейное перемещение.
Входные величины создают механические силы, дей­
ствующие на подвижную часть. Обы,шо в механизмах
подвижная часть может толыю поворачиваться во\(руг
оси, поэтому механические силы, действующие на :.11еха­
низм, создают момент М. Этот момент называется nра­
щающим моментом.
Вращающий момент, поворачивающий подвижную
1Jасть n сторону возрастающих показаний по часовой
стрелке, будем считать положительным. Вращающий
момент является не1юторой функцией измеряемой вели­
чины х и угла поворота подвижной части а:
M=f1 (x,a).
(5.1)
72
Для электромеханических приборов общее выраже­
ние вращающего момента можно представить как про­
изводую энергии магнитного (или эле1<трическоrо) поля
no геометрической 1<оординате, 1<оторой для большинства
приборов является угол поворота подвижной части, т. е.
(5.2)
М = dWмlda,
rде Wм - энергия магнитного (или электричес1<0rо) по­
ля, сосредоточенная в измерительном механизме.
Под действием вращающего момента М подвижная
часть поворачивается до тех пор, по1<а он не уравнове­
сится противодействующим моментом Мпр- Противодей­
ствующий момент М11р направлен навстречу nращающе­
му моменту М и возрастает при увеличении угла пово­
рота подвижной tJасти:
(5.3)
Mnp = F2 (а) .
Положение равновесия подвижной части, соответст­
вующее некоторому установишемуся отклонению, бу:.�.ет
определяться равенством
(5.4)
М + Мпv = О.
Подставив (5.1) и (5.3) в (5.4), получим уравнение
преобразования механизма прибора
(5.5)
а = F (х).
В зависимости от физических явлений, положенных в
основу создания вращающего момента, или, другими
словами, от способа преобразuвания электромагнитной
энергии, подводимой 1< прибору, в механическую энергию
перемещения подвижной части электромеханические
приборы делятся на следующие основные системы: маг­
нитоэле1<тричес1<Ие, электромапштные, электродинами­
чес1<Ие, ферродинамические, электростатические, инду1<­
ционные.
Кроме перечис.'Iенных основных систем эле1<тромсха­
ничес1шх приборов известны также вибрационные, теп­
ловые и другие системы приборов.
В данной главе рассматриваются маrнитоэле1<триче­
ские, эле1<Тродинамические, электростатические механиз­
мы и их применение. Индукционные механизмы рассмот­
рены в гл. 13.
5.2. МАГНИТОЭЛЕl(ТРИЧЕСl(ИЕ МЕХАНИЗМЫ
Работа механизмов магнитоэлектрической системы
основана на взаимодействии магнитного потока постоян-
-;з
ноrо магнита и тока, проходящего по 1<атушке (рамке).
Возникающий при этом вращающий момент отклоняет
подвижную часть механизма относительно неподвижной.
В зависимости от того, какой из уr<азанных элементов
(постоянный магнит или рамка) является подвижной
частью, различают механизмы с подвижной рамкой и с
подвижны:-.� магнитом.
Магнитная цепь измерительного механизма с внеш­
ним магнитом (рис. 5.2) состоит из сильного постоянно­
го магнита 1, полюсных наконечников с цилиндричес1<0й
Рис. 5 2. Магы1тоэлектрн11еский ме){анизм с внеwним магнитом
расточ1<0й 3, цилиндричес,юrо сердечни1<а 4 и магнито­
провода 5, выполненных из маrнитомяпюго материа.11а.
В воздушном зазоре между сердечником и полюсными
наконечниками создается сильное, праr<тически равно­
мерное радиальное магнитное поле.
Подвижная часть механизма 2 представляет собой
катуш,<У (рамку) прямоугольной формы из тонrюrо мед­
ного или алюминиевого провода, намотанного на алюми­
ниевый кар1<ас (либо без каркаса), 1<0торая может пово­
рачиваться воr<руг сердечника в магнитном поле. К рам­
ке с двух сторон приI<леиваются алюминиевые буксы
для за�<репления растяжек шш кернов. Уравновеши�За­
ние подвижной части осушествJ1яется грузиками 6.
Стрелка 7 и циферблат со шкалой образуют отсчетное
устройство.
74
Измеряемый ток / подводится к обмотке рамки через
две растяжки 8 или две спиральные пружины (если рам­
J<а 1<репится на кернах), которые создают противодейст­
вующий момент Мпр , Противодействующий момент про­
порционален углу закручивания пружин, или, что то же,
углу поворота подвижной части а, т. е. Мпр =-\Wа, где
\\',' - удельный противодействующий момент, постоянный
для данного устройства.
При проте1<ании по обмотке рамки по�гоянноrо то1<а
I на рамку действует пара сил г-Г, сuцающая враща­
ющий момент М:
(5.6)
М = dW ,,/da = / d'I'lda,
где 1t?м- энергия ыаrнитноrо поля; dW" - приращение
энергии магнитного поля; da - угол поворота.
При повороте рамки на угол da в равномерном ра­
диальном магнитном поле изменение потокосцепления
равно:
d'l' = Вlbw da = Bsw da,
где В - магнитная индукция в воздушном зазоре; l длина активной стороны витr<а; Ь - средняя ширина об­
мотки рамки; w - число витков ра�1ки; s=Ьl- актив­
ная площадь рамки.
Подставив d'I' в (5.6), получим:
М = Bswl = 'l'o /,
где 'I'o =Bsw - изменение потокосцепления обмотки
рам,ш при повороте ее на угол а, равный 1 рад.
Установившееся отклонение подвижной части опре•
деляется равенством М=-Мпр или 'I'ol= \tla, от1<уда
вытекает уравнение преобразования
а= Ч'о / = Bsw / = S' /
(5.7)
s;
117
117
1 '
где
=а// - чувствительность механизма к току. На­
помним, что чувствительность механнзма отличается от
чувствительности прибора (см. § 1.4).
Из (5.7) следует, что отклонение подвижной части
пропорционально току, т. е. прибор имеет равно:мерную
шкалу.
Для регулировки номинального угла от1<лонения в
механизмах имеется магнитный шунт 9. Это п.r1астннка
из магнитомяrrюrо материала, 11ерез которую проходит
часть магнитного потока. Перемещая ее, можно реrули75
ровать ответвляющийся в магнитный шунт магнитный
пото1< и тем самым изменять магнитную индукцию в воз­
душном зазоре.
Успокоение в магнитоэлектрических механизмах
магнитоиндукционное, но без применения специальных
успокоителей. Момент магнитоиндукционного успокое­
ния подвижной части с кар1<асной рам1юй определяется
взаимодеikтвием магнитного пото((а с вихревыми то1<а­
ми, вознш<ающими в алюминиевом каркасе при движе­
нии подвижной части в поле постоянного магнита.
В зависимости от класса точности и констру1щии при­
бора применяются различные констру1щии магнитной
цепи. От магнитной цепи требуется обеспечение постоян­
ства индукции во времени, при изменении температуры,
при наличии внешнего магнитного поля и т. п. Постоя11ные магниты изготавливаются из высоко1<ачественных
сплавов железа, нш<еля, алюминия и I<обальта, обеспе­
чивающих индукцию 0,15-0,3 Тл.
н� рис. 5.З, а-д изображены наиболее типичные
конструкции магнитных цепей (на рис. 5.3, а-г системы
N
S
а)
2}
Рис. 5 3 Конструкции магнитных цепей.
с внешним маrнитом, на рис. 5.3, д - с впутренннм маг­
нитом).
В механизмах с внутрирамочным ыагнитом (рис.
5.3, д) неподвижный постоянный магнит 1 у1{реплен вну76
три рамки 2, а1{Тивные стороны 1<0tорой находятся
между полюсными башмаками 3 и магнитопроводом 4
из маrнитомяrкоrо материала. Преимуществом такой
конструкции является лучшее использование магнитной
энергии магнита, что позволяет создавать миниатюрные
лр}!боры.
Существуют маrнитоэле1<трические механиз\tЫ, у 1ю1·орых подвижной частью является постоянный МШ'Ш!Т,
вращающийся внутри неподвижной I<атушки. Однако
приборы с такими механизмами применяются редко.
Маrнитоэле,прические механизмы, применяемые в
амперметрах и во.JJьтметрах, обладают сравнительно
большим моментом инерции подвижной ча, ги и могут
применяться только на постоянном токе. При пропуска­
нии по обмотке рам1<и TOI<a t=lmsin rot, среднее значение
которого за период равно нулю, поворота подвижной
части не произойдет, та1< I(ЗК среднее за период значение
вращающего момента также равно нулю. Действитель­
но, мгновенное значение вращающего момента m=
='I'0i='Y0/ m sinrot, а его среднее значение равно:
т
мер = Т
11',/ms SIП. (w.-� dt = о.
о
Если кривая переменного тока имеет постоянную со­
ставляющую, то подвижная часть повернется на угол,
обусловленный этой составляющей.
Температурные влияния на механизм могут быть
вследствие как выделения теплоты в обмотке рамки от
рабочего тока, так и изменения температуры внешней
среды. При повьш,ении температуры уменьшаются
удельный противодействующий момент спиральных пру­
жин и растяжет< (примерно на 0,3-0,4% на 10° С) и
магнитный поток постоянного магнита (примерно на
0,2-0,3% на 10° С). Эти факторы в некоторой степени
компенсируют друг друга. С повышением 7емпературы
во зрастает сопротивление обмотки рамки, что вслед­
ствие большого температурного коэффициента меди или
алюминия (4% на 10° С) и в зависимости от �хемы
включения механизма может вызвать значительны� из­
менения по1<азаний.
Достоинствами магнитоэлектричесI<оrо механизма по
сравнению с другими механизмами являются большая
чувствительность, малое собственное потребление мощ77
нести, ма.�юе влияние внешних магнитных полей благо­
даря сильному собственному магнитному полю, прямая
пропорциональность между током в обмоп,е рамки и
углом отклонения.
Недостат�<и магнитоэлектрических механизмов сложность конструкции, высокая стоимость, а также
чувствительность I< перегрузкам и изменениям: тока.
Благодаря отмеченным достоинстоам маrнитоэлект­
ричес1<Ие приборы с внешним и внутренним магнитами
являются наиболее точными: имеют классы точности 0,1
и хуже. Температурные погреш­
1
ности приборов 1<омпенсируются
с помощью специальных схем.
МаrнИТ()Электрические прибоN
s
ры находят широ1юе применение
в 1шчестве амперметров и вольт­
метров постоянного тока с преде­
лами измерений от наноюшер до
килоампер и от долей милливоль­
та до киловольт, гальванометров
3
постоянного тока, гальваномет­
ров переменного тока и осцил­
лоrрафичес1шх гальванометров;
в сочетании с различного рода
преобразователями переменного
Рис. 5.
4. Маrнитоэлектрический лоrометри•1еский механизм.
ТО!{а В ПОСТОЯННЫЙ ОНИ ИСПОЛЬЗУ·
ются для измерений в цепях пере­
менноrо тока.
Широ1<0е применение нахолоrометрические
также
д,ят
магнитоэлектрические механизмы. В маrнитоэлектриче­
с1<Их лоrометрических механизмах (рис. 5.4) в поле
nостоянноrо магнита 1 находится подвижная часть из
двух жестко укрепленных на оси рамок 2. Пружины,
создающие противодействующий момент, здесь не нуж­
ны. Токи /1 и /2 подводятся к рамкам с помощью «без­
моментных» токоподводов. Противодействующие момен­
ты, обусловленные ими, малы, и их можно не учитывать,
при этом на рамки действуют моменты, направленные в
противоположные стороны (один можно считать враща­
ющим, а другой - противодействующим). Форма сер­
дечнш<а 3 и полюсных наконечников 4, выполненных из
маrнитомяпюrо материала, выбирается такой. чтобы ин­
дукция в воздушном зазоре была неравно;-.,1ерной и на78
правленной нерадиально. Инду1щия в местах расположе­
ния активных сторон рамок соответственно равна: В 1 =
=f1( a) и В2=/2(а), тогда моменты, действующие на
подвижную часть, можно выразить следующим образом:
(5.8)
М1 = 11 F1 (а); -М2 = /2 F2 (а).
Подвижная часть занимает положение установивше­
гося отклонения, соответствующее условию М 1 =-М2
или l1F 1 (а) =l2F2 (а), откуда
/if/2 = F2 (a)!F1 (a) = F3 (a),
или
(5.9)
Таким образом, лоrометр измеряет отношение токов,
протекающих в обмотках рамок.
5 3 МЛГНИТОЭЛЕКfРИ11ЕСКИЕ АМПЕРМЕТРЫ
11 ВОЛЬТМЕТРЫ
В простейшем приборе для измерения Т{Жа, построен­
ном на маrнитоэлектрическоl\1 механизме, весь измеряе­
мый тоr< проте1<ает по обмотке рамки (рис. 5.5, а). По
такой схеме выполняют приборы для измерения малых
токов-микроамперметры и миллиампер:-.1етры (с верх­
ним пределом измерения 30-50 мА). На показаниях этих
приборов не сказывается изменение температуры окруМеiJь
Рнс. 5.5. Схемы магнитоэлект­
рических амперметров.
манганцн
Рис. 5.6. Схема уменьшени11
температурной погрешн ости.
жающей среды, так как при любом сопротивлении об­
мотки прибор измерит тот ток, I<оторый протекает по
ней.
В приборах на большие токи используются шунты.
Амперметры с шунтом представляют собой милливольт­
метры, измеряющие падение напряжения на шунте (рис.
5.5, 6).
79
У приборов с шунтом при изменении температуры ок­
ружающей среды происходит перераспределение токов в
параллельных ветвях и изменяется показание, т. е. появ­
ляется температурная погрешность, равная 0,004° С 1•
Простейшим способом уменьшения влияния темпера­
туры является включение последовательно с обмоткой
рамки добавочного резистора R 1 из манганина (рис. 5.6),
при этом уменьшается температурный коэффициент цепи
рамки, но на рамку падает только часть напряжения,
снимаемого с шунта. Следовательно, механизм получаеr
только часть полезной мощности, отбираемой от шунта.
Этот способ применяется для приборов класса точности
не выше 1,0.
В приборах класса точности 0,5 и выше применяют
последовательно-параллельную схему температурной
компенсации (рис. 5.7). При повышении температуры
Медь
-,-
манганин
R,,,
Рис. 5 7. Последовательно-па­
раJ1J1еJ1ыrая схема температур­
ной компенсации.
.L
Rш
Рис. 5.8. Схема компенсации
температурной погрешности с
терморезистором.
возрастают сопротивления рамки Ro и резистора R2, по­
этому ток 1 1 несколько уменьшается. Сопротивление вет­
ви Ro +R 1 возрастает в меньшей степени, чем сопротив­
ление ветви R2• Поэтому тоr< 1 1 будет распределяться
иначе, т. е. в ветвь Ro +R 1 будет поступать относительно
большая часть тока, чем до повышения температуры.
Значения сопротивлений R 1 , R2 , Rs можно выбрать таки­
ми, чтобы ток в рамке lo в заданном температурном
диапазоне изменялся в пределах, определяемых допус­
тимым значением температурной погрешности.
Для температурной компенсации вместо сопротивле­
ния R 1 в схеме рис. 5.6 можно использовагь полупро­
водниковые терморезисторы, имеющие отрицательный
температурный коэффициент. Однако поскольку темпе­
ратурный коэффициент терморезистора сильно и нели80
нейно зависит от температуры, то для уменьшения этой
зависимости его шунтируют резистором из манганина
R2 (рис. 5.8). В настоящее время терморезисторы д.'lя
температурной 1юмпенсации применяются в приборах
сре дних 1<лассов точности, главным образом, из-за раз­
броса в номинальных значениях сопротивлений.
Температурная ,юмпенсация может осуществляться с
помощью термомагнитного шунта, выполненного из мате­
риала, магнитная проницаемость 1<оторого уменьшается
с повышением температуры.
Магнитный поток, ответвляе­
и
мый в шунт при повышении
температуры, уменьшается, а
инду1<ция в воздушном зазоре
повышается и компенсирует
снижение вращающего момен­
та уменьшением тока в рамке.
Для построения вольтмет- Рнс. 5_9_ Схема маrнито­
ра на базе магнитоэле1причес- э-1ектрическоrо вольтметра.
кого механизма измеряемое напряжение должно быть преобразовано в пропорциональ­
ный ему ток. Для этого последовательно с измеритель­
ным механизмом включают добавочный резистор из ман­
ганина Rд (рис. 5.9). Значение сопротивления для изме­
рения напряжения U определяется по формуле
(5.10)
Iu = Ul(Ro + Rц),
т
где /0 - ток полного от1<лонения; Ro - сопротивление
механизма.
При изменении температуры в вольтметре появляется
температурная погрешность, тю< 1<а1< вследствие измене­
ния Ro изменяется то1< в рамке /о (5.10). В вольтметрах
на напряжение в сотни вольт R'il. во много раз больше
Ro, поэтому температурнан погрешность мала. но с
уменьшением предела измерения она увеличивается и
ограничивает нижний предел измерения вольтметра.
Магнитоэле1<трические амперметры и вольтметры яв­
ляются наиболее точными, обладают высокой чувстви­
тельностью, малым собственным потреблением мощно­
сти, имеют равномерную шкалу. На них слабо влияют
внешние магнитные поля.
Недостат1ш этих приборов - пригодность толыю для
работы на постоянном то1<е, чувствительность I< пере1·рузкам, сравнительно высокая стоимость.
6-970
81
Отечественш1я промышленность выпуснает магнито­
электричесl<ие амперметры и воJ1ьтметры щитовые и пе­
реносные, однопредельные и мноrоnредельные всех l<Лас­
сов точности от О, 1 и хуже.
5.4. ГАЛЬВАНОМЕТРЫ МАГНИТОЭЛЕКТРИЧЕСКОЯ СИСТЕМЫ
Гальванометрамн называются электµо11змернтепы1ые приборы с
высокоi1 •1увствителыюстью к то1,у или напряжению, имеющ11е не­
градуированную шка.1у. Otrи используются в качестве нуль-1111дика­
торов, а также для 11змерения малых тшщв, напряжен11i1 11 количеств
электричества.
Наибольшее распространение получнли для nостоянноrо тока
маr11итоэле1<тр11чсс1<11е гальванометры с nодвнжной рамкой, а для
nepe�1eнnoro тока - вибрационные маrиитоэле1пр11чес1ше гальвано­
метры с подвижным магнитом.
Высокая чувствительность в гальванометрах достrrrается глав­
ным образом путем уменьшения противодействующего момента и
nримененrrем светового указателя с большой длиной луча.
I(онструктивно гал1,ванометры выпо.,шяются в в11де переносных
(со встроенной ш1,алой), имеющих стрелочные пли световые указа­
тет1, и в виде зеркальных (с отдельной шкалоii), требу,ощнх ста­
ционарной установ1,и по уровню. Подвнжная часть в nереноспых
rальвано�1етрах у1,реnляется ua растяжках, а в зеркальных - на
1шт11 подвеса.
В зеркальных гальванометрах с отдельно/\ шкалоi, (рис. 5.10)
np11 отсу-rствнн тока в рамке nада1ощий на зерl(а.�ьне 2 луч света от
Рнс. 5.10. Оптическое отсчетное
устроiiство.
лампы 1 отражается на ссредшrу шкалы 3 в виде тошюй световой
nо.1осы. Прн нал11чю1 ТОl(а све,rовая полоса перемещается по шкале
на а ми.r.лнметров. Наблюденне за показаниями гальванометра мо­
rут вести нескольl(О лиц.
У зеркального гальванометра угол поворота рамкн в раднанах
определяется из выражения tg 2a=a/l, где l - расстояние между
зеркал1,цем и щка.1ой. Прн малых углах 011<.1011ення (менее 3°) мож­
но тангенс угла заменить углом и nршrять a:,,,:2al. Следовательно,
при известном l по перемещению световой полосы а можно опреде­
лить уrол поворота подвижной частн а.
При световом отсчете можно увелнчнп, чувствнте11ьность галь­
ванометра, во-первых, за счет тоrо, <1то угол поворота отраженного
лу•1а вдвое больше угла поворота зеркальца, а во-вторых, за счет
тоrо, <1то длина луча может быть сде.11ана оче111, бо,1ьшой.
S2
Так 1,ак чувствителыюсть зеркального гальванометра завнснт от
расстояния между зерRальцем н шхалой, принято приводить ее к
длнне луча l = I м и выражать в миллиметрах на ампер, например
S,=109 мм/(А-м).
В паспортных данных гальванометров пр11вод11тся величина, об­
ратная чувствительностн; для переносных гальванометров - цена
делени!!, например: 1 дел. = 10-6 А; для зерка.11ь11ых гальваномет­
ров - постояш1аS1, напрнмер: C1=JO-9 А-м/мм.
Нанболее удобны для работы переносные гальванометры с внут­
ренним световым отсчетом.
На по движную часть гальва11O�1етра при ее двшкешш кроме вра­
щающего и протнводеi1ствующеrо моментов действует также момент
успокоения. .Момент успокоешrя можно представить в виде
Му =- Pda/dl,
где Р=Р,+Р2 - коэфф1щнент успокоения маг11итоэле1прического
rаJ1ъванометра; Р 1 - !{Оэффнциент успокоения рамки вследствне ее
трения о воздух; Р2 - коэффициент магнитоиндукционного успокое­
ния рамки.
Следует оп1етить, что P2 -:t, Р,, поэтому в первом приближении
Р, можно пренебречь и рассматрнвап, толыю коэффициент маr1-1и­
тонндую.r11онш1rо успокоення Р2 �Р. Маrннтошrдукцношюе успокое­
н.не обусловлено тем, что при двнженни ра¼юr в магнитном поле в
ее вптках наводится ЭДС
е =- d\f0 /dt =- '!'0 da/dt.
Эта ЭДС вызывает в обмотке ра11пш ток
i = е/(Rг+ Rвш),
где Rг - сопротивленне обмотки рамки гальвано'l!етра; Rsш -сопро­
тнв.nение внешней цепн, на которую рамка замкнута
От взаимодействия тока i с мапттным потоком возшrкает мо­
мент успокоепш1
М = [- WU(R.,
У
где Р='l'20/(Rг+Rвш ) ; 'f0 =&w.
+ Rвш)] da/dt,
С.nедовательно, изl\!еняя внешнее сопротивление, на которое
замкнута рамка, можно изменять момент успокоения.
Рассмотрим с.nучай, когда подвJ1жная часть после начального
отклонения а" возвращается в исходное состояние. Если момент успо­
кое11ия подвижной части отсутствует (Mv=O), то подвижная часть
будет совершать свободные незатухающие колебания (рис. 5.11) с
амп.nитудой ехт=ан и периодом To=2nV J/W, rде J -момент ,тер­
ции подвижной части. Если рамка замкнута на очень большое сопро­
тивление, то нз-за действия момента маrнитоннду1щионноrо успо1ше­
ння колебания затухают с периодом Т>То (рис. 5.12, кривая а).
При усJJовии, что рамка замкнута на внешнее очень малое сопрот11в­
ле1111е (момент магн11тоинду1щионноrо успокоенпя очень большой),
подвпжная часть будет очень медленно апериод11чес1ш подходить к
исходному положению (рис. 5.12, кривая 6). Существует граничный
режнм, когда двткение подnнжной част11 нз периодического перехо­
дит в апериодическое. Такой rрапич11ый режнм называется крнтн-
6*
83
ческим (рис. 5.12, кривая о), а внешнее сопротивлешrе, при котором
наступает IфИтпчесюrй режим движения, - внешним критическим
сопротивлешrем гальванометра R вш.кр- Отношение Р/Рнр = � называ­
ется степенью успокоения. Здесь Р - коэффициент успокоешrя при
д<1нном сопротивлении внешней цепи; Ркр - коэффициент успо1юе­
н11я нри сопротивлении внешней цепи, равном внешнему I{ритн1JеСI{О•
му сопротивлению Rnш.крПр11 использовании гальванометра для измерепия напряжения
ero характеризуют чувствителыюеrью к напряжению
(5.11)
Su = а/Uг = а/(!Rг) = S1 / Rг,
где а - отклонение указателя гальванометра, вызванное пр11ложе11ным напряжешrем Uг.
ПоСJ<о.nьку характер дв11жен11я подвижной части rащ,ваноыетра
завис11т от его успокоения и рекомендуется работать с успокоенным
t
Рис. 5.11. Кривая зависимости
а от времен11.
t
Рис. 5.12. Кривые изменения
а(/) д.nя разных /3.
гадьвано��етром, то практичесЮI под чувствите.лыюстью к напряже­
нию понимают отношение
(5.12)
где R.,p=R,-+R.вш кр- полное крнтичешос сопротпвление.
Согласно ГОСТ 7324-80 допускается отк.nоненне значения цены
деления или постоянной от указанного в паспорте от ±0,5 до ± 10%
в зависимости от типа гаJ1ьванометра . Кроме того, гальвано�1етры
делятся иа разряды постоянства. Под разрядом постоянства нулево­
го по.nожепня указатеJrя понимают невозвращенне у1<азате.'1я к иу.nе­
вой отметке при плавном движении его от крашrей отметки ш1(алы.
Разряд постоянства указывается на шкале в внде одного числа из
ряда 0,2; 0,5; 1,0; 1,5, заключе�1ноrо в рамку в виде ромба.
Регу.nировкой магнитного шунта, которым снабжены мноrне
rальваиометры, изменяется магнитная индукция в рабочем зазоре.
Следовательно, изменяются постшшная и другие параметры гальва­
нометра, поэтому в паспорте гальванометра указывается постояииая,
соответствующая двум крайним положешrям шунта, - полностью
введенному и потюстью выведенному.
Для установки указателя на нулевую отметку rа.nьванометр
снабжается корректором, а зеркальные гальванометры, кроме того,
имеют арретир - ме.ханнческое устройство, предохраняющее подвиж­
ную 1Jасть от повреждr1шй при транспортнровt{е.
При работе с га.nьванометрами для их защиты от термо-ЭДС,
84-
контактных разност<'1i nотенцналов, токов уте <1ек и других воз-.�ож­
_
ны>- помех 1,с1 10льзуются электростатичес1н1с экrзны. Металл11чесы1й
корпус гальванометра может нсполъзоваться в каqестве экр�на. Эr{­
р;�н присоединяется к зажиму с 11адп�1с1,ю «Экран», котоrыи соеди­
няется с общим экvаном из меритеJ1ыюи цепи.
Выпускаемые nро�1ышлен11остыо наиболее чувствительные галь­
ванометры ныеют <1увств11тельность 1{ току 10 11 мм/(А,м), а пер снос­
ныс-4• 109 дел./А.
Баллистический гальванометр. Пр н определении ряда электрн•
ческнх 11 маrннтных велнчин возникает необходнмость в измерении
электричества
коJ1ичсства
импульсов ·rш{а. Для 11з�1сµе­
нш1 количества электри11сс1·ва
кратковре:-.1енных
11м11у.nьсов
тока используются Gа.n.nистн­
ческие гальванометры. Они
t
пrсдставляют собой маrн11то­
э:1с1<Трнчеа,ие гальванометры,
работающие в качестве щпе­
граторов тока. Баллнстнчес1н1е
выпускаются
1·аm,ва1ю111етры
Р11с. 5.13. Крнвые i(t) 11 a(t) при
1,ак со встроепноii, так н с от­
кратковременном действии имnуJJь­
дельной шкалой.
са тока.
Кратковременный 11мпул1,с
тока i (рис. 5.13), nротекающнй в бса,аркасной рамке
гальванометра, взаимодействуя с магнитным полем постоянного
магнита, вызывает кратковременный импульс вращающего момента.
Под действием этсrо момента подвиж1,ая част�, от1wоняется от ну­
левого положен11я на t1скоторый угол, затем под де.\ств11ем проти­
водействующего момента возвращается в 11сход11ое положен11е. Ес­
лн время действпя нмпульса тока t" настолько мало, что уrлоиое
перемещение а подвнжноii част11 за это время рав110 нулю, то пер­
вое наибольшее от1,лоt1е1111с подв11жной части a 1m (рнс. 5.13) 11 со­
ответствующее ему отклоненне указателя а1,,. пропорц11ональны ко­
.111•1еству протекающего эле1,тричества.
tи
Q
=j
о
idt
= C�aim = CQ a1m,
(5. 13)
где CQ - цена деления (баллист11чеffiаЯ постоянная) гальванометра.
Следовательно, необходимо, чтобы продолжительность нмnуm,са
тока t" быда нам11оrо меньше пернода свободных колебаний подв11ж­
ной част11 To(fu<O,!To). Поэтому пернод собственных колебаний
подвнжноii части у баJiлистнческих гальванометров боJП,шой - око;ю
18-20 с. Увеличение То=2т�
1/W достигается путем увел1111сю1я
момента 1шерц11и подвнжной част11 с помощыо укрепленных на под­
весе или растяжках дополнительных деталеi'� (колец, днс1,а и др.).
uалл11стпческая чувств1гrелъность Sq =a1rn!Q нли цена деления
(баллнстичеffiая постоянн<1я) CQ = l/S q в отл11ч11е от чувств11телыюсп1
к току зав11снт от сопротивлеt1ия внешней uenи, на которую замкнут
гальванометр. Чувствите;1ьность S q увелнчнвается с увелнчешrем со­
противлени11 внешней цепи, поэто:11у перед прнмснсн нем гальвано�1ет­
ра 11е0Gход11мо оnредел11ть его баллнстнчсскую постоянную пр11 том
сопротнв.nе111ш цеп11, прн котором гальваномет р будет работать.
85
V
Несмотря на то что S q возрастает с увеличением виешнЕ'.rо со­
противления, в большинстве случаев целесообразнее обеспечить ра­
боту 1·альва11ометра в режиме, бт1з1юм к крити•!ес1ю�1у, та1, ка1, при
этом время возвращешrя в псходное положение уменьшается.
В каталогах обычно приnодится uена де.пения «баллистичешая
постояЮ1аЯ>►, опреде.nенная при внешнем сопротивленин, равном кр11тическо�1 у. Наиболее чувствительным ба.1лиспrческнм гальваномет­
ром явю1ется 1·а.п1,ванометр типа М 17/ 13, т-1еющий баллнсrическую
постоянную Cq =0,8· 10-9 Кл•м/мм.
Вибрацио11ный гальванометр. Вибрационные rа.nьванометры ис­
пользуются в ка•1естве нулевых инд,шаторов в цепях перемен�юrо
тока в диапазоне частот 3{}--100 Гц. Наиболыuее распространение
получили магнитоэлектрические вибрацною,ые гальванометры с 110,1-
о)
Рис. 5.14. Вибрационный га11ьваиометр.
вижным магнитом (рис. 5.14). Подвижная чаСТh гат,ваноыетра
(рнс. 5.14, а) состоит из укрепленных на растяжках 1 маJiенькоrо
посrоянноrо маrннта 2 из высоко1<0:1рцитивноrо сплава ri зеркальца
3. Подвижной магнит 2 расположен между 1Jолюсам11 э.,ектромаrни·
та 4 (рнс. 5.14, б); катуш1,а 5 электромаrннта включается в цепь
переменного тока. Перпендику.nярно полюсам э.nектромаrнита 4 рас­
положен маrш1толровод 6, в зазоре которого вспомогательным маг­
нитом 7 обеспеч1rвается nосrоя,шый магнитный поток, создающий
вместе с растяжками противодействующий момент. При отсу·rствии
переменного тока в катушке 5 подвижной маrннт 2 устанавливается
вдоль линий nостоюшоrо магнитного поля, т. е. он неподвнжен, 11
отраженный от згркаJJьца 3 луч дает на шка.�е В узкую световую по­
лосу. Прн наличии переменного тока в катушке 5 подвижной магнит
стремнтся установиться вдоль результирующего магнитного поля, т. е.
колебJiется с амг.литудой, зависящей от тока, при этом отраженный
от зеркальца 3 луч света дает на шкале световую полосу, ширина
r{отоfой пропорциональна значению измеряемого тока.
1ри равенстве частоты измеряемого тока частоте собственных
колебаний подвнжной части (режнм резонанса) вибрационный
гальванометр имеет наибольшую чувствительность. Длн настройки
86
гальвапометра на резонанс с помощью ручки 9, выведенной на па­
нель прибора, изменяют по1южение магнита 7 и, следовательно,
частоту собственных колебаний, завнсящую от значения противо­
действующего момента. Внбрациштый гальванометр нмеет ампли­
тудно-частотную ларактеристику с узкой по1юсой пропускания,
поэтому при незна¼Ительных отI<лонениях частоты переменного тока
от частоты настройки гальванометра чувствите.nыrость его будет су­
щественно меньше паспортной. Ввиду этого вибрацнонные гальвано­
метры д.nя намерений переменных токов II напряжений пе nрнмеия­
ются.
Для защнты от влияний внешних мапштных полей в внбраuнои­
ных гальвано�1етрах применяются экраны из пермаллоя.
В настоящее время широко испо.nьзуется вибрационный гальва­
нометр типа М501, имеющий соотвстствешю постоянные по току
C1=l6-I0-8 А/мм и по иапряженнrо Cu=2,2,1Q-5 В/мм и работаю­
щий в диапазоне 11астот 30-100 Гu.
5.5 ЭЛЕКТРОДИНАМИЧЕСКИЕ И ФЕРРОДИНАМИЧЕСКИЕ
МЕХАНИЗМЫ
Работа измерительных механизмов электродинамиче­
с1юй системы (рис. 5.15 и 5.16) основана на взаимодей­
ствии магнитных полей двух 1<атушек с токами - не­
подвижной 1 и подвижной 2. Подвижная катушка,
Рнс. 5.15. Схема устройства
измерительного
механиз,1а
электродинамической системы.
Рис 5.16. Электродинамнческ11i1
измерительный механщм.
укрепленная на оси или растяжках, может поворачи­
ваться внутри неподвижной. При проте1<ании в обмотках
катушек токов i1 и i2 возникают эле1,тромагюпные силы,
стремящиеся так повернуть подвижную часть, чтобы
87
магнитные потоки подвижной и неподвижной катушек
совпали.
Неподвижная 1<атушка 1 обычно выполняется нз
двух одинаковых частей, разделенных воздушн ым зазо­
ром. Благодаря этому обеспечиваются требуемая конфи­
гурация магнитного поля и удобство расноложения оси.
Неподвижная и подвижная катуш1ш механизr..1а (обычно
бескар1<асные) имеют круглую или прямоугольную фор­
му и изготавливаются из медного или алюминиевого
провода. Подвижная катушка укрепляется на опорах
или растяжках. Для подвода то1<а 1< подвижной 1<атуш1<е
используются спиральные пружины или растяжки. При­
меняются стрелочные или световые указатели.
Собственное магнитное ПOJie элек тро;:t.инамических
механизмов, силовые .1инии которого замыкаются по
воздуху, невелико. На электродинамические механизмы
ВJ!Ияют внешние магнитные поля. Для защиты от них
применяется э1<рапирование, т. е. измерительный меха­
низм помещают внутри одного или двух э1<ранов из фер­
ромагнитного материала. Успо1юение - воздушное ию1
магнитоинду1щионное (при наличии э1<ранирования от
полей рассеяния постоянного тормозного магнита).
Для защиты от влияний внешних магнитных полей
иногда испоJ1ьзуется астазирование. Астатичес1шй изме­
рительный механизм состоит из двух пар катуше1<, при­
чем подвижные катушки укреплены на одной оси и сме­
щены по оси относительно друг друга. Магнитные nпля
неподвижных катуше1< направJ1ены взаи::vшо противопо•
ложно. Противоположно направлены магнитные поля и
подвижных катуше1<, поэтому вращающие моменты, дей­
ствующие на подвижную часть, направлены одинаково.
Следовательно. равномерное внешнее магнитное поле
будет усиливать поле одной неподвижной катуш1<и и на­
столыю же уменьшать поле другой, в результате влия­
ние внешнего магнитного поля почти полно..:тью исклю­
чается. Астатические механизмы применяются ре д�ю
вследствие усложнения и удорожания I<онстру1щии, уве­
личения габаритов, а также потому, что астазирование
ис1<лючает влияние толы<0 равномерных магнитных по­
лей.
Энергия магнитного поля двух I<атушек с токами / 1
И /2
(5.14)
88
где L 1 и L 2 - инду1<тивности 1<атушек; М 12 - взаимная
индуктивность l{атушек.
В (5.14) толыю взаимная индуктивность 111 12 зависит
от угла поворота подвижной части, поэтому вращающий
момент равен:
(5.15)
М = dW�ifda = /1 /2 dM12lda.
При проте1<ании по катушкам переменых токов i1 =
=l1щsin wt и i2 =121nsin (wt-'lj)) подвижная часть из-за
инерционности будет реагировать на среднее значение
вращающего момента:
т
т
1 Jm dt = dM 12 - 1 {1 m /2 m sin wt sin (wt-,J;) dt =
Mcp =-dex, т
То
u
-J
(5.16)
где / 1 и l2 - действующие значения токов.
Таким образом, вращающий момент пропорционален
произведению действующих значений токов в 1<атушках
и косинусу угла сдвига фаз между ними. Следователь­
но, электродинамичес,шй механизм обладает фазочув­
ствительными свойствами. Поэтому он может быть
использован не только для измерения тока и напряже­
ния, но и мощности.
Если противодействующий момент создается упруги­
ми элементами, то для режима установившегося откло­
нения (М=-М11р ) получим:
/1 /2 cos \jJ dM12 /da = Wa,
откуда для механизма прибора, работающего на пере­
менном токе,
(5.17)
Следовательно, �арактер ШI<алы прибора зависит от
произведения / 1/2cos 'Ф и dM 12 /da. Взаимная индуктив­
ность между I<атушками определяется формой, размера­
ми и их взаимным расположением, т. е. M12=f (а).
При проте1<ании по катушкам постоянных токов /1 и
/2 уравнение преобразования можно представить следу­
ющим выражением:
1
а= - 11 /2 dM1ida,
w
(5.18)
89
Основными достоинствами электродинамических ме­
ханиз111ов являются одина�ювые показания на постоянном
и переменном токе (при последовательном соединении ка­
туше�<), что позволяет с большой точностью градуиро­
вать их на постоянном тш<е, а также стабильность пока­
заний во времени.
Недостатка!'l-ш электродинампческих механизмов явля­
ются невысокая чувствительность, большое собствеш-юе
потребление мощности, чувствительность к перегрузкам.
Указанные свойства электродинамических механиз­
мов позволяют на их основе выпус1<ать лабораторные
многопредельные приборы высою1х I<Лассов точности
(0,5; 0,2; 0,1) для измерений на постоянном и переменном
то1<е. Выпускаются миллиамперметры и амперметры с
пределами от I мА до 10 А на частоты до 10 кГц, много­
предельные вольтметры с пределами от 1,5 до 600 В на
частоты до 5 1<Гц с то1<0м полного оп<Лонения от 60 до
м
�-----_,а}
б}
Рис 5 17 Констру1щ1111 ферродннамических механизмов.
а - однолатушечноrо. 6 - двухкатуше1н1оrо
3 мА, многопредельные однофазные ваттметры с преде­
лами по току от 25 мА до 10 А и по напряжению от 15
до 600 В.
Механизмы ферродинамичес1юй системы отличаются
от рассмотренных электродинамических механизмов тем,
что неподnижная катуш1<а имеет магнитопровод из маr­
нитомяrкого листового материала.
На рис. 5.17, а, б изображены две 1<онстру1щии фер­
родинамических механизмоn - однокатушечная и двух1<атушечная. Благодаря наличию магнитопровода маг­
нитный поток и, следоnательно, вращающий момент су­
щественно возрастают, поэтому МДС катушки может
быть снижена и, следовательно, уменьшено собственное
потребление мощности механизма.
90
Подвижная катушка в ферродинамических механиз­
мах выполняется бескаркасной во избежание появления
в каркасе индуцированных токов. Противодействующий
момент создается пружинами, т. е. Mпp =-Wu.
Собственное магнитное поле в ферродинамических ме­
ханизмах сильное, поэтому внешнне магнитные поля на
ннх влияют слабо. Конструкции механиз!11ОВ, изображен­
ные на рис. 5.17, а, 6, особенно хорошо защюцены, так
1<ак магнитопровод одновременно является экраном.
Успокоители применяются магнитоиндукционные и жид­
костные.
Наличие магнитопровода обусловливает появ.1ение
погрешности от гистерезиса и вихревых токов, поэтому
ферродинамические приборы обладают большей основ­
ной погрешностью, чем электродинамические.
Неподвижная катушка 1 (см. рис. 5.16) в ферродина­
мическом механизме располагается на магнитопроводе,
а подвижная катушка 2, укрепленная на оси, пере!11еша­
ется в воздушном зазоре с равномерным и радиа:1ьным
магнитным полем.
Общие выражения вращающего момента (5.15) и
(5.16), полученные для электродинамического механиз­
ма, остаются в основном справедливыми и для ферроди­
намического механизма. Однако так как в воздушном за­
зоре, где перемещается подвижная катушка, магнитное
поле равномерное и радиальное, то dM12/da=const. Кро­
ме того, в связи с тем что вращающий момент создается
в результате взаимодействия индукции В 1 в зазоре маг­
нитопровода и тока в подвижной катушке /2, то в (5.16)
,,,,..,.........__
,,,,..,.........__
войдет не cos·ф=cos(/ 1 , /2 ), а cos(B 1 , /2 ). Вращающий
момент (среднее значение) можно представить выраже­
нием
(5.19)
где с - коэффициент, определяемый конструктивными
параметрами и выбором системы единиц.
Так как при работе используется линейный участок
кривой намагничивания материала магнитйпровода, то
индукция В 1 пропорциональна току / 1 . У гол между В1 и
/1, обусловленный потерями в стали, практически очень
мал; этим углом пренебрегают, и тогда вращающий мо­
мент определяется по формуле
М = С1 /1 /2 COS 'ljJ,
(5.20)
91
а уравнение nреобразования имеет вид:
С(,=
(5.21)
.!i.. /112 cos -ф.
w
Достоинствами ферродинамических nриборов явля­
ются меньшая, чем у электродинамических, восприимчи­
вость к внешним магнитным полям, меньшее собственное
nотреб.rJение мощности, больший вращающий .1.';IОмент.
Однако точность и частотный диапазон у них ниже, чем
у электродинамических.
Указанные свойства ферродинамических приборов оп­
ределяют область их примtнения - в качестве щитовых
и переносных приборов переменного тока, а также в ка­
честве самопишущих приборов.
Отечественная про�1ышленность выпускает тряско-,
вибро- и ударопрочные щитовые ферродинамическнс ам­
перметры и вольтметры классов точности 1,5 и 2,5, пе­
реносные амперметры и вольтметры класса 0,5, щитовые
и переносные ваттметры к.r�ассов точности 0,2 и 0,5.
Применяются они преимущественно на пере�-.1енном токе
промышленной частоты.
Широкое применение находят электродинамические и
ферродинамические лоrометрические механизмы разно-
!i/'
"'t1i
t2S_
1
..L
т
tr
lz
-
4
Ii
I,
Рис 5 18 С:хема устройства и векторная диаграмма эдектродшнu.ш­
ческоrо л_оrометра.
образных конструкций и типов. На их основе изготавли­
ваются приборы для измерения угла сдвиrа фаз, часто­
ты, емкости, индуктивности и т. п.
На рис. 5.18 изображен электродинамический лого­
метр. Он состоит из неподвижной катушки А, имеющей
две части, и двух жестко скрепленных под некоторым уг­
лом подвижных катушек 1 и 2. Для подвода тока к под92
вижным катушкам служат безмоментные токоподводы.
По неподвижной и подвижным катушкам протекают
токи/, /1 и /2 соответственно. От взаимодействия тока/,
протекающего по неподвижной катушке А, с токами /1 и
/2 , протекающими по подвижным катушкам 1 и 2, созда­
ются два вращающих момента М 1 и М2, направленных в
противоположные стороны и зависящих от угла поворо­
та подвижной части. Выражения д.11я вращающих момен­
тов ( средние значения) можно представить в виде
М 1 = С1 ll1 cos 'lj)1 {1 (а);
(S.22)
}
- М2 = С2 ll2 cos 'Ф2 f2 (а),
где 'Ф1 - фазовый сдвиг между токами / и / 1 ; 11,2- фазо­
вый сдвиг между токами / и / 2 ; с1 и с2- коэффициенты,
определяемые конструктивными параметрами и выбором
системы единиц.
Под действием этих моментов подвижная часть пово­
рачивается до тех пор, пока М 1 =-М2, тогда
С1 П1 COS'\j)1 f1 (а)= С2 Il 2 COS'\j)2 f2 (а),
или
(5.23)
Из (5.23) видно, что угол поворота подвижной части
электродинамического лоrометра определяется отноше­
нием проекций векторов токов в подвижных катушках на
вектор тока в неподвижной катушке.
Лоrометры ферродинамической системы могут быть
как с равномерной, так и с неравномерной магнитной
индукцией, с пер екрещенными и с непе�крещенными
подвижными катушками.
На рис. 5.19 приведены две конструкции часто при­
меняемых .тюrометров: с перекрещенными (рис. 5.19, а)
и с неперекрещенными (рис. 5.19, б) подвижными ка­
тушками 1 и 2. Устройство лоrометра на рис. 5.19, а в
значительной степени аналоrочно устройству магнито­
электрического лоrометра. В лоrометре на рис. 5.19, б
подвижные катушки перемещаются в воздушных зазорах
двух магнитопроводов, смонтированных вместе. Магнит­
ные потоки в зазорах магнитопроводов создаются непо­
двюкными катушками А 1 и А 2, обтекаемыми одним током.
От взаимодействия магнитных потоков в зазоре маг­
нитопровода и токов в подвижных катушках / 1 и /2 соз­
даются два вращающих момента М, и М2, направленных
93
в противоположные стороны и по аналогии с (5.19) име­
ющих средние значения:
M1 =c1 B1 11 cos'ФJ.;
(Б.24)
}
- М2 = С2 В2/2 cos '%,
где 'Ф• и 'Ф2 -фазовые сдвиги соответственно токов / 1 и
/2 относительно тока /; В1 и В 2- магнитные индукции в
воздушных зазорах в местах нахождения подвижнь!х ка-
о)
а)
Рис. 5 19. Конструкции ферродинамических лоrометров.
а - с перекрещенными катушками. 6 - с 11еnерекрещенным11 катушкамп.
тушек, зависящие от тока/ и угла отклонения подвижной
части, т. е. B 1 =c;Zf1(a.) и B 2 =c;!f2(a), тогда
М 1 = С3 Zl1 cos 'Ф1 f1 (а);
(S.2S)
}
- М2 = С4 Zl 2 cos 'Ф2 f2 (а).
Из условия равновесия М 1 =-М2, полагая сз =с 4 ,
имеем:
(5.26)
5 6 АМПЕРМЕТРЫ И ВОЛЬТМЕТРЫ
ЭЛЕКТРОДИНАМИЧЕСКОЯ И ФЕРРОДИНАМИЧЕСКОЯ
СИСТЕМ
Наибо.ТJее простая измерительная цепь у взмернтеля
тока - миллиамперметра электродинамической системы,
изображенного на рис. 5.20, а. Весь измеряемый ток про­
ходит через подвижную 2 и неподвижную 1 катушки, сое­
диненные последовате.11ьно, поэтому угол ф=О и уравне­
ние (5.17) принимает вид:
а = _l_ 12 dM12 •
(S.27)
W
94
dct
У амперметров на токи от 0,5 А и выше катушки сое­
диняются параллельно (рис. 5.20, б). Сопротивления па­
раллельных цепей подобраны так, чтобы то�< /2 не пре­
вышал допустимого значения, т. е. l 1 =k 1 I, l2 =k2I,
(k 1 +k2=l), и уравнение (5.15) приводится к виду
kJ2 dM 12
а--'k1 2 -- ..
W
( 5.28)
da
Следовательно, у механизмов амперметров угол от­
клонения подвижной части зависит от квадрата измеряе­
мого тока /2 и производной dM12/du.
�
а)
т
Rл2
!i)
Рис. 5.20. При11ципиа,1ьные схемы электродинамических амnерметров.
Рис. 5.21. Схема электродииамическо•
ro вольтметра.
Для создания двухпредельноrо амперметра непо­
движная катушка делается из двух одинаковых секций,
переключая которые с последовательного соединения на
параллельное, получают пределы измерения с соотноше­
нием токов l : 2.
У электродинамических вольтметров неподвижная и
подвижная катушки соединены последовательно вместе
с добавочным резистором из манганина (рис. 5.21). Сек­
ционированием добавочного резистора можно получить
разные пределы измерения. Если ток полного отклоне­
ния I =Vfzв, где Zв-полное сопротивление вольтметра,
то, подставив его в (5.17), получим:
l (.;2 dM 12
--a=\V i1:. da. '
в
(5.29)
95
т. е. характер шкалы у вольтметра такой же, как и у
амперметра.
Для получения шкалы, близкой к равномерной, у
амперметров и вольтметров размеры подвижной катушки
выбирают так, чтобы подвижная катушка находилась
nрактпчески в равномерном магнитном поле. В этом
случае если 13 - начальный уrол между плоскостями l<а­
тушек (равный 135° при а=О), то при оп<лонении под­
виж1юй части на угол а от начального положения М12=
=c1cos(f3-a), а dM 12 /da=c1sin(r1-o:). Пос1<0льку а
изменяется от О до 90°, получим, •Jто sin(�-a) пр и углах
от О до 45° будет возрастать, а после 45" убывать. В ре­
зультате, как видно из (5.27)-(5.29), удается в ампер­
метрах и вольтметрах электродинамической системы пи­
лучить приблизительно равномерную шкалу, за исклю­
чением ее начальной части.
На показания электродинамических амперметров и
вольтметров оказывают влияние внешние магнитные по­
ля, температура окружающей среды и частота тока.
В амперметрах с последовательным соединением ка­
тушек изменения их сопротивления при изменении тем­
пературы не влияют на показания, но имеющая при этом
место некоторая температурная погрешность обусловле­
на изменением упругих свойств спиральных пружин или
растяжеJ{.
В ампер1\1етрах, имеющих параллельно соединенные
I<атушки, вследствие неодинакового изменения сопротив­
лений ветвей может иметь место температурная погреш­
ность за счет перераспределения токов 1, и 1 2 в парал­
лельных ветвях. Для компенсации температурной по•
грешности путем подбора добавочных резисторов из
манганин;� и меди делают равными температурные 1ю­
эффициенты параллельных ветвей. Аналогично ко�шен­
сируется температурная погрешность, обусловленная из­
мененпем упругих свойств пружин или растяжек.
На показания ампер:-.1етров с последовательной схе­
мой соединения катушек влияние частоты неве.JJико, и
проявляется оно, начиная с сотен герц.
В амперметрах с параллельным соединением катушек
из-за разного соотношения активных и реаl{тивных со­
nротивлений целей и влияния взаимной индуктивности
между катушками может иметь место частотная погреш­
ность. Д.r�я уменьшения частотной погрешности с по­
мощью Rд1 и Rд2 (рис. 5.20, 6) делают одинаковыми по96
стоянные времени параллельных цепей. т. е. L 1 IR1 =
=L2/R2, где L 1 и L2- индуктивности, а R, и R.2- а!{ТИВ·
ные состав.r1яющие поJ1ных сопротивJ1ений параллельных
це пей.
В вольтметрах электродинамической системы темпе­
ратурная погрешность обусловлена изменением сопро­
тивленпй катушек и упругости пружин и растяжек. Поэ­
тому температурная погрешность, обусловленная измене­
нием сопротивлений катушек, тем меньше, чем больше
сопротивление добавочного резистора из манганина по
сравнению с сопротивлением катушек.
Изменение частоты вызывает изменение реактивной
составJ1яющей по.1шого сопротивления цепи вольтметра и
создает частотную погрешность. Для 1<0мпенсации этой
погрешности часть добавочного сопротиrщения шунтиру­
ется конденсатором с емкостью С (рис. 5.21).
В амперметрах ферродинамической системы катушки
механизма соединяются последовательно и.r�и параллель­
но. Уравнение преобразования в обоих слуrrаях имеет
вид:
а:= 112 = kl2,
(5.30)
w
т. е. шкала получается квадратичной.
Для вольтметров ферродинамической системы, ка­
тушки которых вместе с добавочным резистором Вl(ЛЮ­
чаются последовательно, из (5.30) получим:
(5.31)
где z - полное сопротивление вольтметра.
Из (5.31) с.r�едует, что шкала вольтметра также име­
ет квадратичный характер.
В ферродинамических приборах температурная по­
грешность обусловлена теми. же причинами, что и в элек,
тродинамических, а также и изменениями потерь в маг­
нитопроводе.
Влияние изменения частоты на ферродинамические
приборы больше, чем на эдектродинамичес,ше, вследст­
вие ббльших значений индуктивностей катушек ферро­
динамичес1шх приборов. Компенсация частотной погреш­
ности осуществляется в результате подключения конден­
сатора, как и в схеме на рис. 5.21.
Вследствие наличия магнитопровода в ферродинами­
ческих приборах при работе на постоянном токе возни97
7-970
кает погрешность от гистерезиса, а при работе на пере­
менном токе оказывают влияние потери в ма1·нитопрово­
де, нелинейность кривой намагничивания материала
магнитопровода и др. Эти причины снижают точность и
ограничивают частотный диапазон прибора.
5.7. ВАТТМЕТРЫ ЭЛЕl(ТРОДИНАМИЧЕСl(ОЯ
И ФЕРРОДИНАМИЧЕСКОИ СИСТЕМ
Для измерения мощности постоянного и переменного
тока на практике часто используются электродинамиче­
ские и ферродинамические ваттметры.
При измерении мощности постоянного тока электро­
динамическим ваттметром неподвижная катушка (обе
секции) включается последовательно с нагрузкой (рис.
5.22, а), и по ней про ходит ток нагрузки /. Поэтому она
-
v\
fj
I
ju
i
½QГ
oJ
а)
Рис. 5 22. Электродинамический ваттметр.
о - схема 11змср11тель11оi1 це1111. 6 - ве,порная двоrрамма.
называется последовательной цепью ваттметра. К под­
вижной катушке, соединенной последовательно с доба­
вочным резистором Rд , подводится напряжение U, и по
ней проходит ток lu= И/Ru, где Ru - полное сопротив­
ление параллельной цепи.
Для ваттметра, включенного в цепь постоянного тока,
в соответствии с (5.18) имеем:
_1_ ..!:!._ [ dM12 = ..!:i_ dM12 Р.
а=
(S.З2)
\\7 Ru
da
W
da
Из (5.32) видно, что при условии dM 12/da=co11st
шкала ваттметра будет равномерной.
В электродинамическом ваттметре на рабочем участ­
ке шкалы это условие всегда обеспечивается путем вы­
бора определенных соотношений размеров катушек и их
начального взаимного расположения.
98
При включении ваттметра в цепь перемею-Юl'О тока �
напряжением u=Vmsin rot и током нагрузки i=
=lnisin ( rot-q>) ток в параллельной uели равен:
iu = Urn sin (rot- б)lzu ,
где zu-полное сопротивление параллельной цепи; бyro.'l отставания по фазе тока fu от напряжения V из-за
наличия индуктивности в параллеJ1ьной цепи (рис.
5.22, б).
В этом случае [см. ( 5.17)]
1 V
dM
12 cos qJ
I -а= - u.
( - 1:)
W zu dCt.
Учитывая, что dM 12/ da =const, Zu=Ru!cos б, получаем:
а= ..!:1.. VI соsб cos (q> - б),
\t,'
(5.33)
т. е. отклонение а будет пропорционально активной мощ­
ности при условии, что б=О (zu=R u ). СледоватеJJьно,
ток в параллельной цепи должен совладать по фазе с
напряжением (параллельная цепь должна иметь актив­
ное сопротивление), тогда
а= k2 Ul cos q> = k2 Р.
(5.34)
Угол б можно сделать лишь малым в некоторой об­
ласти частот, шунтируя добавочный резистор R;i, (и.11и
его часть) в параллельной цепи ваттметра (рис. 5.22, а)
конденсатором С.
Выполнение условия zu=Ru позволяет производить
поверку и градуировку ваттметра с высокой точностью
на постоянном токе.
Дополнительные погрешности у электродинамических
ваттметров могут быть вызваны влиянием температуры,
частоты переменного тока, внешних магнитных полей.
Влияние температуры сказывается на изменении па­
раметров цепи подвижной катушки и упругости пружин
и аналогично влиянию температуры на вольтметры элек­
тродинамической системы.
Изменение частоты приводит к изменению полног о
сопротивления цели подвижной катушки и, следователь­
но, 1( изменению значения тока lu. Кроме того, лоявлнет­
ся угловая (фазовая) погрешность-угол от�тавания по
фазе тока lu от напряжения И, что вызывает более ощу99
тимую погрешность ваттметра. Для уменьшения угловой
погрешности применяют частотную компенсацию.
Для защиты от влияний внешних магнитных полей
электродинамические ваттметры экранируют или выпоJ1няют их l{ОНструкции астатическими.
В ваттметрах направление отклонения укпзателя из­
меняется при изменении полярности тока или напряже­
ния. При одновременном изменении полярности тока и
напряжения, как видно из (5.34), знак вращающего мо­
мента и направ:1ение отклонения указателя не изменя­
ются, а при изменении полярности тока или напряжения
указатель отклоняется в противоположную сторону.
Поэтому зажи�1ы последовательной и параллельной це­
пей ваттметра имеют разметку. Зажимы, обозначенные
звездочкой (*), называются генераторными и должны
в�<лючаться в линию со стороны генератора, т. е. со сто­
роны поступ.r1ения энергии.
Электродинамические ватт:v1етры обычно выполняют­
ся многопредельными как по току, так и по напряжению.
Для этого неподвижная катушка состоит из секций, сое­
диненных последовательно или параллельно, а в цепи
подвижной катушки добавочный резистор ныполняется
секционированным так, чтобы получать несr<:олько номи­
нальных напряжений.
Градуируются ваттметры в делениях так, что при
номинальных токе lном, напряжении Ином и cos q:>= 1
стрелка отклоняется на полное •шсло делений шкалы
alllli (100 или 150 дел.). Для определения измеренного
значения мощности отсчитанное число делений надо ум­
ножить на цену деления Сно ,,, которая для каждого пре­
дел а измерения рассчитывается по формуле
(5.35)
Для измерениrr в цепях с малыми значениями cos q:>
применяют маJю1юсинусные ваттметры, у которых отк.110нение стрелки на полное число делений шиалы имеет
место при lно�1Ином и COSq:>=0,1 или COSq:>=0,2, указан­
ном на шиале.
Ферродинамический одинофазный ваттмегр включа­
ется в цепь аналогично электродина,-.1ическому ваттмет­
ру (рис. 5.22), а постоянство dM 12/da у него обеспечива­
ется равномерным и радиальным магнитным полем в
воздушном зазоре, где находится подвижная I<атушка.
Уравнение преобразования легко получить из (5.33),
100
полагая, что фазовый сдвиг между то1<ами в неподвиж­
ной катушке / и током в подвижной катушке lu равен ер
за счет применения компенсации угловой погрешности,
обус.повленной индуктивностью подвижной катушки и
углом потерь в магнитопроводе и деталях механизма.
Шкала ферродинамическоrо ваттметра, 1<ак и у электро­
динамичес1шrо, равномерная.
Ферродинамический ваттметр по сравнению с элек­
тродинамическим имеет больший магнитный поток и,
следовательно, мало восприимчив к внешним магнитным
полям, имеет меньшее собственное потребление мощно­
сти и большую чувствительность, более устойчив к меха­
ническим воздействиям.
Вместе с тем ферродинамическим ваттметрам прису­
щи специфические погрешности от влияния вихревых то­
ков, гистерезиса и нелинейности кривой намагничивания.
Так, вследствие маrнитноrо гистерезиса на постоянном
токе по1<азания при возрастающем и убывающем токе
будут разными. Нелинейность 1<ривой намагничивания
материала магнитопровода приводит к тому, что одно и
то же показание может наблюдаться при разных значе­
ниях тока, напряжения и коэффициента мощности.
Указанные погрешности снижают точность ферроди­
намичес1шх ваттметров, поэтому они выпускаются в ка1Аестве щитовых приборов классов точности 1,5 и 2,5 для
измерения мощности в однофазных и трехфазных цепях.
Трехфазные ферродинамические ваттметры а1<тивной и
реактивной мощности бывают двухэлементные и трех­
элементные. Первые применяются для измерения мощ­
ности в трехфазных трехnроводных цепях, а вторые - в
трехфазных четырехпроводных цепях. Они состоят из
двух или трех однофазных элементов, имеющих общую
ось с у1<репленными на ней подвижными катушка.ми.
Вращающий момент такого прибора равен алrебраиче­
с1шй сумме вращающих моментов отдельных элементов.
5.8. МЕХАНИЗМЫ ЭЛЕКТРОМАГНИТНОИ СИСТЕМЫ
Работа электромагнитных измерительных механизмов
основана на взаимодействии маrнитноrо поля, созданно­
го неподвижной катушкой, по обмотке которой протека­
ет измеряемый ток, с одним или нес1юлы:ими ферро­
магнитными сердечниками, эксцеитрично укрепленными
на оси. Наибольшее распространение получили измери101
тельные механизмы с плоской катушкой, с круглой ка­
тушкой и с замкнутым магнитопроводом.
Измерительный механизм с плоской катушкой (рис.
5.23) состоит из катуш1ш 1 с обмопюй из медного про­
вода, ·имеющей воздушный зазор, и сердечника 2. Сер­
дечник из ферромагнитного материала с высокой маг­
нитной проницаемостью и малой коэрцитивной силой
3
5
Рис. 5.24. Электромагнитный
измерительный
механ11зм с
замкнутым магнитопроводом.
Р11с. 5.23. Электромагнитный
+- механизм с плоскоr1 катушкой.
у1<репляется на оси с опорами 3 или на растяжках. Про­
тиводействующий момент создается спиральной пружи­
ной или растяжками. Успокоение магнитоиндукционное
ИЛИ ЖИД!ЮСТНОе.
В механизмах с круглой катуш1юй неподвижный сер­
деч1ш1< и подвижный, укрепленный на оси, располага­
ются внутри катуш1<и. При протекании тока в обмотке
катушки оба сердечнш,а намагничиваются одноименно и
оттаmшnаются друг от друга. Поэтому подвижный сер­
дечник вместе с осью и другими деталями, укрепленными
на ней, поворачивается на некоторый угол.
Механизмы с замкутым магнитопроводом (рис. 5.24)
являются более совершенными.
Катушка 1 расположена на неподвижном магнитопро­
воде 3 с двумя парами полюсных наконечнчков 4 и 5,
магнитопровод и полюсные наконечники выполнены из
магнитомнrкоrо материала. Подвижный сердечник 2 из
J0.2
магнитомяrкой стали или пермаллоя, укрепленный на
растяжках, может перемещатьсн D зазоре между полюс­
ными наконечниками. Успо1юение жидкостное.
При протекании тока через катуш1<у возникает маr1штное поле, которое, nоздейстnуя на подвижный сердеч­
ник 2, стремится распоJюжить его так, чтобы энергия по­
ля была наибольшей. Энергия магнитного по.11я элек­
тромагнитного механизма, имеющего 1<атушку с током /,
равна Wм =½f 2L, где L-индуктивность I<атушки; / ток в обмотке, тогда вращающий момент равен
М = d\17м = _1 dL [2.
(5.36)
2 da
da
При проте1шнии в обмотке катушки переменного то­
ка i=lm sin rot подвижная часть вследствие своей инер­
ционности будет реагировать на среднее значение вра­
щающего момента, равное
т
мср-_1 -dL 1 .i2 dt = -1 dL /2
5
2 da Т
2 da '
u
rде / - действующее значение переменного тока в об­
мотке.
Из условия статического равновесия М =-Мпр или
1 dL
- / = Wa можно получить 11ыражение для угла от2 da
клонсния подвижной части
= _1 dL
а
12
(5.37)
2W da '
2
поэтому шкала у электромагнитного измерительного
прибора неравномерная. Обычно в электромагнитных
механизмах форма сердечника подбирается так, что
шкала практически раnномерная, начиная с 15-20% ее
конечного значения.
Показания электромагнитных измерительных прибо­
ров на постоянном токе различаются при возрастающих
и убывающих значениях тока. Эти различия обусловлены
потерями на гистерезис, и в приборах, механизмы кото­
рых имеют сер..:�.ечники из электротехнической стали, со­
ставляют 2-3%. В приборах с механизмами, имеющими
сердечник из пермаллоя, это различие ничтожно мало.
При работе механизма электромагнитной системы на
переменном то"е в окружающих металлических частях и
сердечнике возникают вихреnые токи, размз.rничивающие
103
сердечник Вследствие этого показания на переменном
токе немного меньше, чем на постоянном. Указанное раз­
личие в nо1,азаниях увеличивается с ростом частоты, но
на частоте f=50 Гц оно невеюшо.
Магнитное поле в электромагнитных механизмах без
магнитопроводов, замыкающееся в основно'\4 по воздуху,
невелико, поэтому внешние магнитные поля существенно
влияют на показания приборов с та1шми механизмами.
ДJ1я уменьшения влияния внешних магнитных полей
применяют экранирование. В механизмах с магнитопро­
водом собственное магнитное поле сильнее, поэтому эк­
ранировать приборы с такими механизмами не надо.
Недостатки электромагнитных мехавиз�ов - нерав­
номерная шкала, влияние внешних магнитных полей на
механизмы без магнитопровода и большое собственное
потребление мощности.
Достоинства электромагнитных механизмов - пригод­
ность для работы ва постоянном и переменном токе,
устойчивость 1< токовым перегрузкам, простота конструк­
ции.
Благодаря отмеченным достоинствам электромагнит­
ные механпзмы используются в технических щитовых
амперметрах и вольтметрах класса точности 1,0 и более
низких 1,лассов для измерений в цепях переменного то1,а.
Кроме того, они применяются в переносных мноrоnре­
дельных приборах класса точности 0,5.
Широкое nримене�ше на переменном токе находят
также эле1промаrнитные лоrометрические механизмы.
Электромагнитные логометричес1ше механизмы бывают
двухмоментные и трехмоментные.
Двухмоментный электромагнитный лоrометр (рис.
5.25) состоит из двух неподвижных катушек и двух
ферромагнитных сердечню,ов, укрепленных на одной оси.
Катушки с токами и сердечники укреплены так, что при
увеличении угла поворота а, и, следовательно, при из­
менении положения сердечников относительно катушек
индуктивность одной катушки возрастает, а другой убы­
вает, поэтому произво дные dL 1 /da, и dL 2 /da, 11меют раз­
ные знаки, а вращающие моменты, действующие на сер­
дечнюш, направлены в противоположные стороны . Тогда
для статического равновесия (М 1 =М 2 ) при условии, что
магнитная связь между 1<атушками отсутствует, имеем:
_1_
2
fi
dL1
da
= _I_ J� dL2
2
da '
откуда
или
(5.38)
Кроме описанного двухмоментноrо логометра сущест­
в уют различные 1юнструкции трехмоментных логометри­
ческих механизмов электромагнитной системы. Харак­
терным для них является наличие переменной магнитной
связи между 1<атуш1<ами.
Эле1промаrнит,1ые лоrометрические измерительные
механизмы в настоящее время используюrся в фазомет-
Рис. 5.26. Схема эле1<тромаr­
нипюrо во.'!ьтметра.
+- Рис. 5.25. Электромаrнит1JЫй
лоrометрический изМ"еритеJiьный
механизм
рах, но имеют меньшее распространение, чем магнито­
электрические и электродинамические лоrометрические
механизмы.
Электромагнитные амперметры и вольтметры. В ам­
перметрах электромагнитной системы весь измеряемый
ток проходит по катушке измерительного механиз,1а.
Значение номинальной МДС, необходимой для создания
10�
магнитного поля в зазоре 1<атушrш, составляет: 100 А в
механизмах, подвижная часть 1юторых 1<репится на опо­
рах; 50 А в механизмах с подвижной частью, укреплен­
ной на растяжках; 20 А в механизмах с замкнутым маг­
нитопроводом. Поэтому для расширения диапазонов из­
мерения эле1<Тромагнитных однопредельных ампермет­
ров одного типа необходимо уменьшить число витков
катуш1ш. В амперметре на номинальный ток 100 А ка­
тушка имеет один виток, выполненный из толстой мед­
ной шины. Такие амперметры для прямого включения на
токи больше 200 А не изготовляют из-за нагрева шины
и сильного влияния на показания прибора маrнитноrо
поля токоподводящих проводов. Диапазоны измерения
электромагнитных амперметров, работающих на пере­
менно:.� то1<е, проще расширять с помощью измеритель­
ных трансформаторов тока.
Эле1,тромагнитные щитовые амперметры обычно вы­
пускаются однопредельными, а переносные - мноrопре­
деJ1ьными (до четырех пределов измерения).
Для расширения диапазонов измерения переносных
мноrопредельных эJ1ектромагнитных амперметров катуш1ш выполняют се1щионированными. Секции включаются
в последовате,'lьно-параллельные 1юмбинации. Переклю­
чение секций производится с помощью переr{лючающих
устройств.
Температурная поrрешrюсть у электромагнитных ам­
перметров невелика и обусловлена только изменением
упругости спиральной пружины или растяже1<. Измене­
ние сопротивления обмотки катушки из-за влияния внеш­
ней температуры не вызывает погрешности, так 1,ак весь
измеряемый то1, проходит по обмотке.
Дополнительная частотная погрешность в электро­
магнитных амперметрах вследствие вихревых токов в
сердечню,е и поверхностного эффекта в проводах обмот­
ки также невелика.
В вольтметрах элеrпромаrнитной систе!У!ы последова­
тельно с катушкой измерительного механизма в1,люча­
ется добавочный безреактивный резистор Rд, выполнен­
ный из манганина (рис. 5.26). Добавочные резисторы
могут быть внутренними и наружными. В мноrопредель­
ных вольтметрах добавочные резисторы делают секцио­
нированными. Для компенсации температурной 110rре ш­
ности у вольтметров необходимо, чтобы отношени е
сопротивления добавочного резистора из манганина к со
106
противлению катушки из меди было достаточно велико
(не меньше некоторого значения, опреде.rrяе�юrо классом
точности прибора). Обычно у вольтметров на напряже­
ние большее 100 В это условие соб.nюдается, и диапазо­
ны измерения их расширяются за счет нзl'v!енення сопро­
тивлений добавочных резисторов при неизменном токе
полного ОТl{ЛОнения.
Вместе с тем имеются таюке конструкции вольтмет­
ров с замкнутым магнитопроводом, у которых катушка
намотана манганиновым проводом, а добавочный резис­
тор отсутствует. По1<азания таких вольтметров мало за­
висят от температуры.
Изменение частоты сказывается на показаниях вольт­
метров больше, чем на показаниях амnер"1етров. Это
обусловлено тем, что с повышением частоты тока увели­
чивается реа1<тивная составляющая сопротивления
катуш1<и вольтметра, вызывающая уменьшение то1<а в це­
пи прибора, и, следовательно, показания его уменьшают­
ся. Поэтому для расширения частотного диапазона необ­
ходи!\ю вводить частотную компенсацию с поl'v!ощью
включения 1<01щенсатора параллельно части добавочного
резистора, как и в электродина:'lшчес1-:ом вольтметре (см.
рис. 5.21).
Электромагнитные вольтметры и ампер\1етры обл;ща­
ют следующими достоинствами: они пригодны для рабо­
ты на постоянном и переменном токе, устойчивы 1< токо­
вым перегрузкам, имеют простую конструкцию.
К числу недостатков можно отнести некоторую нерав­
номерность uшалы, зависимость показаний от внешних
магнитных полей, большое собственное потребление мощ­
ности (за исключением приборов с замкнутъш :,.1 агнито­
проводом).
Существуют та�<же электромагнитные перегрузочные
амперметры, вольтметры номинального значения и нуле­
вые вольтметры.
Отечественная промышленность выпускает: пер1.:нос­
ные амперметры класса точности 0,5 с верхними ilре;.�,е­
лами измерений от 10 мА до 10 А на частоты до 1500 Гц;
щитовые одноnредельные амnер"1етры 1<лассов точности
1,0; 1,5; 2,5 на токи до 300 А со встроенны"ш тращ·qюр1\�аторами тока и до 15 кА с наружными транrфuр"ато­
рами тока; переносные вольтметры класса точности 0,5
с верхними пределами измерений от 1,5 до 600 В; щи·10вые вольтметры 1-:лассов точности 1,0; 1,5; 2,5 с верхними
107
пределами измере1-шй от 0,5 до 600 В непосредственного
включения и до 450 кВ с трансформаторами напр>1же­
ния на различные фиксированные частоты от 50 до
1000 Гц.
5.9. ЭЛЕl(ТРОСТЛТИЧЕСl(ИЕ МЕХАНИЗМЫ
И ИХ ПРИМЕНЕНИЕ
В электростатических механизмах перемещение под­
вижной части происходит под действием энергии э.'lек­
трическоrо поля системы двух или нескольких электри­
чески заряженных nроводншюв. Следователr,но, в данном
механизме в отличие от механизмов других систем пере­
мещение подвижной части осуществляется за счет дей­
стния непосредственно при­
ложенного напряжения. По­
этому в основном эле1<тро­
статические механизмы при­
меняются в приборах, изме­
ряющих напряжение, вольт­
метрах.
Перемещение подвижной
части во всех 1юнструкциях
электростатических вольт­
метров связано с изменением
емкости системы. Распро­
и
странение получили два flИда механизмов: изменение
Рис. 5.27. Эле1,тростатический ем1<0сти в одних осуществ­
ляется за счет изменения
измерительный механизм.
а1аивно11 площади электро­
дов, а в других - за счет
изменения расстояния между электродами. Первые применяются в щитовых и переносных вольтметрах на на­
пряжения от десятков до сотен вольт, вторые- в щито­
вых киловольтметрах.
Устройство механизма с изменением активной л.ю­
щади электродов схематичес1<и по1<азано на рис. 5.27.
Неподвижная часть состоит из симметрично расположен­
ных и электричес1ш соединенных электродов 1. СекторJ­
образная пластина 2 вместе с указателем 3, укрепленная
на оси, образуют подвижную часть. Под действием
подведенного к электродам напряжения И создается
электрическое поле. Силы электрического поля стремят­
сн повернуть подвижную часть так, чтобы энергия элеl(­
трическоrо поля Wэ = ½И2 С 1 была наибольшей, т. е.
108
чтобы подвижный электрод втягивался в пространство
между неподвижными эле1продами и поворачивал ука­
затель. Подвижная часть может быть укреплена на опо­
рах, растяжI{ах или на подвесе, а в l(ачестве указателя
1,роме стрелки применяют также световой луч. Электрu­
ды изготавливаются из алюминия.
В элеI{тростатических механизмах применяют боль­
шей частью магнитоинду1щионные успокоители, реже­
воздушные.
Вращающий момент электростатичеСl(ОГО механизма
равен:
dC
dWэ = l
М=
--U2
.
da.
da.
2
(5.39)
При переменном напряжении и= Umsin wt, приложен­
ном к электродам, подвижная часть вследствие инерци­
онности будет реагировать на среднее за период значе­
ние вращающего момента, равное
т
Мср=-1 dC __
1 5u2 dt= _1_u2 dC
2 da.
Т
2
о
da. '
(5.40)
где U - действующее значение переменного напряжения.
Выражение для угла отклонения можно получить из
условия статического равновесия: М=-Млр или
..!_ u2 dC
2
откуда
da.
= Wcx '
а=1 dC
2\\7 da.
u2.
(5.41)
Следовательно, угол поворота подвижной части элек­
тростатичес1<0го вольтметра пропорционален 1<вадрату
действующего значения напряжения и множителю
dC/da, т. е. шкала вольтметра неравномерна. Путем вы­
бора соответствующей формы элеюродов, их размеров
и взаимного расположения получают такую зависимость
dC/dcx, которая позволяет обеспечить практически рав­
номерную шкалу от 15 до 100% верхнего предела изме­
рения. Вращающий момент электростатического меха1 С - ем1юсть между подвюкным и неподвижным эле1<тродамн.
109
низма мал, что не позволяет на его базе сделать вольт­
метр с пределом измерения меньше 10 В.
Собственное эле1<трическое поле электростатического
вольтметра незначительное, поэтому на работу прибора
сильное влияние оказывают внешние электрические по­
ля. Для уменьшения этого влияния приборы экранируют.
Экраном может служить корпус прибора, если он метал­
лический. Если корпус выполнен из пластмассы, то эк­
раном служит металлическая фольга из немагнитного
материала или алюминиевая крас1,а, �шторой по1,рыва­
ется внутренняя поверхность корпуса. Экран соединяет­
ся с одним из элеI<тродов и заземляется.
Чувствительность электростатических механизмов
мала. Для ее повышения подвижную часть укрепляют на
растяжI<ах или на подвесе, применяют оптический све­
товой отсчет, а также увеличивают емкость механизма,
делая его многокамерным.
На электростатические вольтметры почти не влияют
температура, частота II форма кривой приложенного на­
пряжения и внешние магнитные поля.
Собственное потребление мощности вольтметра на
переменном то1-:е мало, а при в1,лючении в цепь постоян­
ного тока равно нулю.
Перечисленные свойства электростатических вольт­
метров обусловливают их применение в широ1шм часто­
тном диапазоне в маломощных цепях, а также в цепях
высоI<ого напряжения до сотен 1-:иловольт.
Важным вопросом при конструировании элеI<троста­
тических вольтметров нвляется применение высокока­
чественной изоляции между подвижными и неподвиж­
ными эле1,тродами.
При использовании электростатических вольтметров
следует иметь в виду, что большинство вольтметров с
пределом измерения 10-300 В имеет очень малый воз­
душный зазор между пластинами, поэтому для предо­
хранения прибора от повреждения при случайном корот­
ком замыкании пластин внутрь вольтметра встраивает­
ся защитное сопротивление. В таких приборах при
повышении частоты возникает дополнительная погреш­
ность, поэтому при измерениях на частотах более
300 кГц защитное сопротивление надо отключать.
Расширение диапазонов измерения эле1,тростатиче­
ских ВОJ1ьтметров производится на переменном токе в ре­
включения
зультате
добавочного
конденсатора
но
(рис. 5.28) или емкостного делителя напряжения
(рис. 5.29, а), а на постоянном токе - резистивного де­
лителя напряжения (рис. 5.29, 6).
Для цепи, изображенной на рис. 5.28, можно запи­
сать:
V=V
С
V
v
+С
Сд
д
,
rде U - измеряемое напряжение; Uv - напряжение на
вольт,1етре.
Емкость вольтметра С v изменяется в зависимости от
его показания, поэтому с подключением конденсатора
Шш
ГJ Гпi_
а)
Рис. 5 28 Схема электро­
статического вольтмет­
ра.
о)
Рис. 5 29. Слемы расширения диапа­
зонов измерения электростатического
вольт>.1етра.
изменяется отношение U/Uv, что влияет на характер
шкалы. Кроме того, конденсаторы имеют потери, зави­
сящие от частоты. Следовательно, при включении вольт­
метра через добавочный конденсатор погрешности изме­
рений возрастают.
Лучше для расширения пределов измерения электро­
статических вольтметров применять емкостный делитель
напряжения (рис. 5.29, а). В этом случае будем иметь:
cv+c1 +с2
U=Uv----.
Сз
Если параметры емкостного делителя выбраны так,
что C 1 �Cv, то отношение напряжений U/Uv практи11ески не зависит от показания вольтметра и шкала при­
бора не искажается.
Для расширения нижннх диапазонов измерения элек­
тростатических вольтметров их применяют в сочетании
с измерительными усилителями.
111
Отечественная промышленность в настоящее время
выпускает переносные и щитовые однопредельные и мно­
гопредельные электростатические вольтметры классов
точности 0,5; 1,0 и 1,5 на напряжения от 10 В до 300 кВ
и частоты до 10 МГц, имеющие входную емкость от 4
до 65 пФ и входное сопротивление 10 10 -10 12 Ом.
5.10.
ВЫПРЯМИТЕЛЬНЫЕ АМПЕРМЕТРЫ
И ВОЛЬТМЕТРЫ
Магнитоэлектрические приборы характеризуются вы­
сокой чувствите,11ьностью, высокой точностью и малым
потребJ1ением мощности. Но они пригодны только для
измерений в цепях постоянного тока. Для того чтобы ис­
пользовать мап1итоэJ1ектрические измерительные меха­
низмы для измерений на переменном токе, нужно пред­
варителы-ю преобразовать переменный ток в постоянный.
В качестве преобразователей переменного тока в по­
стоянный широкое распространение получили полупро­
водниковые выпрямители. Выпрямите.пьный прибор
представляет собой сочетание магнитоэлектрического
измерительного механизма с выпрямителем на полупро­
водниковых диодах. В выпрямителях применяются дио­
ды из германия и.пи кремния.
Сопротивление по.пупроводниковоrо диода зависит от
полярности приложенного напряжения. При напряже­
нии одной по.пярности сопротивJ1ение диода мало, а при
напряжении противоположной полярности резко возрас­
тает. Соответственно в первом случае сопротивление дио­
да называют прямым, а во втором - обратным. Если к
диоду приложить переменное напряжение, то практиче­
ски он будет пропускать ток тоJ1ько в одном направ­
лении.
Обычно в приборах используют выпрямители двух
типов - однополупериодные и двухпоJ1уnериодные. На
рис. 5.30 дана схема прибора с одноnолупериодным вы­
прямлением, используемая для измерения тока /. Че­
рез измеритеJ1ьный механизм, включенный последова­
тельно с диодом VDI, проходят nолуволны перемею-юrо
тока /,_, одной полярности, nолуволны другой полярно­
сти (обратные полуво.пны) проходят через диод VD2.
Диод VD2 защищает диод VDJ от пробоя и замыкает
цепь тока при обратной полуволне. Сопротивление ре­
зистора R выбирается равным сопротивлению измери­
тельного механизма. Благодаря этому сопротивление
112
прибора будет о динаковым для любого напрамения
тока.
В двухполупериодных схемах выпрямленный ток
проходит через измерительный механизм в обе половины
периода. На рис. 5.31 приведены четыре наиболее расVD1
VDZ
R
Рис. 5.30. Схема вклю•1ения и временные диаrрамм1.,1 токов измери­
тельного механизма с одиополупериодным выпрямителем.
а)
о)
fJ)
г)
Рис. 5.31. Двухполупериодные схемы вкл10•1ения измерительного ме­
ханизма с выпрямителями.
а - траисформаторнdя; б - мостовая; о, г - мостовая с замеиоi! двух д•юдов
резисторами.
nространею1ые схемы двухпо.r1упериодноrо выпрямления.
В схеме на рис. 5.31, а диоды включены во вторичную
цепь трансформатора так, что ток через измерите.11ьный
механизм в те<1ение любого полупериода всегда проходит
в одном направлении. Трансформатор позволяет эJiек­
трически изолировать uепь измерительного механизма
от непи измеряемого переменного тока или напряжения.
Недостатком схемы является зависимость коэффициен­
та трансформации трансформатора от частоты.
В симметричной мостовой схеме на рис. 5.31, 6 четы­
ре диода образуют плечи моста, в диагональ которого
включен измеритеJiьный механизм. Ток все время проте­
кает через измерительный механизм в одном напраrше­
нии, а значение тока в мостовой схеме по сравнению со
8-97{)
113
значением тока в однополупериодной схеме увеличива­
ется вдвое.
Иногда в мостовой схеме два диода заменяют резис­
торами, сопротивление которых равно прямому сопро­
тивлению диодов (рис. 5.31, в и г). Преимущество этих
схем заключается в меньшем количестве диодов. Так как
и прямое, и обратное сопротивления диодов сильно за­
висят от температуры, ·го при замене диодов резистора­
ми уменьшается температурная погрешность прибо�ов.
Кроме того, схема на рис. 5.31, г более удобна для из­
мерения больших токов, так как резисторы R в этом слу­
чае играют роль шунтов. Недостатком схем на
рис. 5.31, в и г является необходимость в более чувстви­
тельном измерительном механизме, поскольку в него от­
Еетвляется Jшшь часть (30-40%) выпрямленного тока
(рис. 5.31, в) или часть переменного тока вообще не вы­
прямляется (рис. 5.31, г).
Мгновенное значение вращающего момента, дейст­
вующего на подвижную рамку измерительного механиз­
ма магнитоэлектрической системы, равно (см. § 5.2):
т = Bswi,
где i - мгновенное значение тока, протекающего через
измерительный механизм.
Из-за инерции подвижной части ее отклонение будет
пропорциональ1-10 среднему значению вращающего мо­
мента. Если ток i=lmsin ffif, то для схемы с однополу­
периодным выпрямлением средний за период вращаю­
щий момент равен:
r
Т/2
Т/2
1
1 s
.
Bsw
Мср=т
т di=Bsw т l111 sшffitdt=
)
2 lcp ,
о
о.
где /ер - средневыпрямленное значение синусоидально­
го тока:
/ ер =
Tfi.
; J /m sin (J)( dt.
о
Угол поворота подвижrюй части
Bsw
а= 2\\7 /сР•
Для схемы с двухполупериодным выпрямлением зна­
чения М ер и а увеличиваются вдвое.
114
На шкалы приборов наносят действующие значения
переменного тока (напряжения). Приняв во внимание,
что действующее значение тока связано со средневы­
прямленным равенством lcp =lfkФ, где kФ - коэффици­
ент формы кривой, получим угол поворота подвижной
части для двухполупериодной схемы выпрямления:
а= Bsw
Wkф
.
I
Выпрямительные приборы градуируют при синусои­
дальном токе (для синусоиды kФ =l,11). При отличии
формы кривой измеряемого тока (напряжения) от сину­
соиды в показаниях приборов возникает погрешность.
Для расширения пределов измерения выпрямитель1-1ых приборов по току и напряжению применяются соот­
ветственно шунты и добавочные резисторы, как и у
обычных магнитоэлектрических приборов.
При изменении температуры изменяется сопротивле­
ние диодов, в результате •�его возникает температурная
погрешность. Для ее уменьшения применяют различные
схемы температурной компенсаnии.
Полупроводниковые диоды имеют емкость. При по­
вышенных частотах часть переменного тока проходит
через эту емкость, что приводит к уменьшению показа­
ний прибора. Для компенсации частотной погрешности
применяют конденсаторы, подключаемые пара,1Jлельно
добавочным резисторам. В этом случае общий ток, по­
ступающий в выпрямительную схему, возрастает с по­
вышением частоты, что компенсирует уменьшение вы­
прямленного тока в измерительном механизме.
Промышленностью выпускаются мноrопредельные
выпрямительные ампервольтметры показывающие и са­
мопишущие, а также выпрямительные фазометры и са­
мопишущие частотомеры.
Достоинства:\1и выпрямительных приборов являются
высокая чувствительность (наименьшие пределы изме­
рения переменных токов и напряжений соответственно
0,25-0,3 мА и 0,25-0,3 В), малое собственное потреб­
ление, широкий частотный диапазон (до 10-20 кГц).
Недостатки приборов - невысокая точность (классы
точности 1,0-2,5) и зависимость показаний от формы
кривой измеряемой величины.
В*
115
5.11. ТЕРМОЭЛЕКТРИЧЕСКИЕ АМПЕРМЕТРЫ
И ВОЛЬТМЕТРЫ
Для преобразования переменного тока в постоянный 11аряду с
выпрямителями nри�1еняются термоэJiектрические преобразователи.
Термоэлектрический nреобразоватеJ11, состоит из нагревателя-провод­
ника, по которому проходит преобразуемый (измеряемый) ток, и
миниатюрной термопары. В качестве иаr·реватеJiя испоJ1ьзуетс,1 тон•
кая проволока, изrотовJiенная из материаJ!З, допускающег о дJIИтеJ!Ь­
ный нагрев, например из нихрома или константана. ЭJiектроды тер•
моnар обы•Jно выnо.•1няют из метаJiлов и их сn.�авов. Примерами мо­
гут СJiужить термопары хромель - копель ИJIИ зОJЮТО - паJ1J1адий платина - платююродий, дающие высокую термо-ЭДС (около 5060 М!{В при нагреве на 1 °С).
Различают контактные термоэлектричесю1е преобразователи, у
которых горячий спай термопары 2 непосредственно приварен к се­
редине нагревателя 1 (рнс. 5.32, а), и бесконтактные термоэJ1ектрн-
�
о-:➔-•
/х
•
о
{})
Рис. 5.32. Схемы термоnреобразователей.
а - ко111 дктноrо; 6 - беС1<онта1<11юrо; в - термобат.аре1L
ческие nреобразоват�ли (рис. 5.32, 6), у которых нагреватель / и го­
рячий спай термопары 2 разделены изолятором - каn.�ей стекла (бу•
синкой) 3; через nоСJrеднюю передается тenJioтa от нагреватеJ1я 1с
термопаре. Изо.1яционная npocлoiiкa между нагреватеJ1ем и термо­
парой уменьшсет чувствительность и увею1•швает инерционность nре­
образоватеJiя, но одновременно изо.�ирует цепь термопары от цеш1
наrреватедя. Поэтому измеряемый ток, 11ротекающий по наrревате.rво,
не ответвляется в цепь термопары (у контактного термоэлектричес­
коrо преобразователя часть измеряемого тока протекает через термо­
пару за с•1ет падения наnряжен11я в месте сварки). Лренмущсство�1
бесконтактных термопреобразоватСJ1ей яв.�яется возможность созда­
ш1я термобатарей, состоящих из нескодьких термопар, соединенных
nоследоватеJ1ыrо (р1�"- S.32, в). Терма-ЭДС термобатареи возрастает
nроnорцнонаJiьно чисду термопар, в резуJ1ьтате чего повышается чув­
ствитСJ1ы1ость термопреобразовате.'!Я.
Термоэлектрические преобразователи, рассчитанные на малые
токи (до I А), помещают в стеклянную колбу, из которой выкачан
воздух. Вакуум уменьшает тепJюотдачу наrреватеJIЯ в окружающую
среду, и, следовате;1ыю, дJ1я нагрева горячего спая термопары тре­
буется меньшая мощность.
Термоэлектрическим прибором называют соединение одного или
нескоJ1ьких термоэлектрических преобразователей с магн11тоэ11ектри­
ческнм измер11те;1ьным механизмом. На рис. 5.33, а, 6 даны схемы
термоэJ1ектри11ескоrо амперметра и термоэJ1ектрического воJ1ьтметра
с бесконтактным тсрмоэJJектрическим преобразователем. В терма1.16
электрических вольтметрах пос.11едовательно с нагревателем включа ­
ется добавочный, обычно непровОJючный, безрсактивиый резистор Rд,
Термо-ЭДС, развиваемая термоэлектрнчсскнм преобразовате;1ем,
пропорциональна ко.11ичсству теплоты, выделенной измеряемым то­
ком в месте присоединения спая. Количество теплоты, в свою 0•1е­
редь, пропорциоштьно квадрату измеряемого тока. Ток / 1 в цепи
измерительного механизма может быть определен как / 1 =E/R, где
Е - терме-ЭДС, R -noшroe сопрот11в.11ение цепи прибора. Таким
образом, показания термоэ.11ектрического прибора будут пропорцио-
oJ
Рис. 5.33. Схемы термоэлектр1-1чсских приборов - амперметра (а) и
вольтметра (б).
напьны квадрату действующего значения тока в нагревателе, т. е.
a=kl';, где k- постоянный коэффициент, зависящий от конструкции
и типа термоэлектри•1еского преобразователя и параметров измери­
тельного мехаш�зма.
ТеПJюта, выде..1яемая электри•1еским током в проводнике, в очень
широких предеJ1ах не зависит от частоты, поэтому термоэJ1ектричес­
кими приборами можно ПОJ1ьзоваться и на постоянном, н на пере­
менном токе, вкJ1ючая токи высокой частоты.
ДJ1я расширения прсде..юв измерения термоэJrектрических ампер­
метров 11спо.%зуют спеuиаJrьные высокочастотные экранированные
трансформаторы тока с магнитопроводами из перма.,шоя ИJIИ ферри­
та. В термоэлектрнческих во.1JЬтметрах расширение пределов произ­
водится с помощью добавочных резисторов.
При измерении малых токов и напряжений термо-ЭДС термопар
будет небольшой, поэтому к выходу термоэжктрических преобразо­
вателей nрисоеднняют уси.r1ител11 постоянного тока, а измерите.11ьный
механизм подкJ1ючают к выходу усиш1те.�я. Таким образом можно
снизить преде.11 измерения термоЭJrеI<трических амперметров и во.'1Ьт­
метров. Например, термоэлектрические приборы типа ТIЗ\ и ТIЗЗ
имеют соответственно нижние пределы измерения напряжения 75 мВ
и тока 100 мкА; класс точностн этих приборов - 1,5.
При вкюочении термоэлектрического амперметра в электричес­
кую цепь тЬк, измеряемый амперметром, будет меньше тока источ­
ника питания / и боJ1ь111е тока в нагрузке lцa r за счет токов уте•1ки
/ 1 п (2 через емкост и С1 и С2 между входными зажимами термоэJrеr,т­
рического преобразоватеJlЯ и общеi1 точкой (рис. 5.34). Особенно ве­
Jшки токи утечки nри измерении токов высокой частоты.
При использовании контактных преобразователей возникает так­
же ток утечки /8 через конденсатор сравнительно бо.JJЬшой емкости
С3 между измеритет,ным механизмом и общей точкой. В резу льтате
ток /3 значительно превосходит токи / 1 и /2 . При испоJ1ьзовrоши бес­
контактных преобразоват елей ток уте•1ки •1ереэ емкость С3 резко
117
уменьшается, так как цепь термопары эJrектри•rески 11зо.�ирована от
цепи нагреватеJ1я, а емкость между термопарой и наrреватеJ1ем нич­
тожно мала. По этой прич1rnе контактные термоэлектрические пре­
образовате.111 не применяются при измерении токов и напряжений
высокой частоты.
Д.1JЯ уменьшения токов утечки
I
термоэлектрп11ес1шi1
амперметр
следует включать в таr<ую точl\у
цели, nотекциал которой отиоси­
телыю земли близок к нулю, например между точками а II Ь на
рис. 5.34. Вкточение теплоэлектри­
,v
ческоrо амперметра, показап11ое
на рис. 5.34, неудачно.
достои11ствами
Основными
{j
термоэле1<трических приборов яв­
JIЯются достаточно высокая -rочность измерений в широком диа•
пазоне частот II независимос-rь
Рис. 5. 34. Схема вк.�юче11ия
показаннй o-r формы кривой токов
ампер•
термоэлектрическщ·о
и напряжений. Термоэлектричесметра.
кие миллиамперметры имеют KJrac­
cы TO'IIIOCTII 1,0 И 1,5. С ПОМОЩЬЮ
термоэлектрических миллиампер­
метров можно измерять токи в обт�сти •1астот от I О Гц до 100 МГц.
К недостаткам термоэлектрических приборов следует от11ести
ма.r�ую перегрузочную способ11ость, большое собственное потребление
li 11еравномерную шкалу.
z
ь
5.12. ЛАБОРАТОРНАЯ РАБОТА .№ 2.
ПОВЕРКА ВОЛЬТМЕТРОВ И АМПЕРМЕТРОВ
Це.% настоящей работы - оз11акомление с методикой поверки
показывающих приборов прямого действия для выявления соответст­
вия прибора обозна•1снному на 11ем классу точности.
В дан11ой работе при выяв.r�еюш соответствия прибора обозна­
ченному 11а нем классу точности прибор подвергается не всем обус­
ловленным ГОСТ испытаниям. Поверку приборов производят путем
сравпеиня показаний испытуемых приборов с показаниями образцо­
вого прибора. Приборы КJ1ассов то•1ности 1,0; 1,5; 2,5 11 4,0 поверяют
путем сJшчения их показаний с показаниями образцов приборов
КJ1ассов 0,2 11 0,5. Поверка водьтметров и амперметров в настоящей
работе производится по схемам рис. 5.35, а и 6.
Задание
1. Ознакомиться с приборами, имеющимися на стенде. Составить
перечень приборов, записать в протокол все паспортные данные этих
приборов.
2. Собрать схему и показать ее для nроверюi руководитеJIЮ.
3. Подать напряжение на схему дJIЯ поверки вольтметра и1ш ам­
перметра. С помощью однофазного регулятора напряжения плавно
переместить стрелку от нулевого показания до максимального и об­
рапю и убедиться в отсутствии треш1я стрелки.
118
4. Прогреть прибор в течение 15 мин током, соответствующим
иомииальному зна•1ению измеряемой веJшчины. После выкJ1ю11ения
прибора проверить, находится ли указатеJIЬ на иулевой отметке шка­
JIЫ. В случае необходимости с помощью корректора установить ук11затv1ь на нуJiевую отметку.
5. Указ11тель испытуемого
прибора установить пос11едова­
телъно на всех чис11овых от­
метках ш каJ1ы сначаJ1а при воз­
растании измеряемой величины
от нуJiя до наибО.ТJЬШеrо зна•1е­
ния по шка11е и затем по тем
же точкам при убыван•ш от на­
ибольшего значения по шкаJ1е
до нуля, прн этом необходимо
сJ1ед11ть за тем, чтобы указа­
те.!JЬ ПОДХОДИJ! к ЧИСJЮВОЙ от­
метке то.�1ыю с одной стороны.
По образцовому прибору оп­
Рис. 5.35. Схе\1а поверки показы­
реде.пить действительное значе­
ние измеряемой веJшчины на вающих приборов прямого дейст­
вия.
этих отмеп<ах.
6. Вычислить абсоJ11отные а - вольтметра; 6 - амперметра.
и приведенные погрешности lI
nопраВIШ, выбнрая для этого
бо.ТJЬшее значение для каждой пары абсолютных погреШностей, по­
Jiученных дJIЯ данной точки. Вычислить вариацию показаний. Вычис­
ления производить по формулам
Д =Хп-Х;
-Л=Х-Хп;
Увар
=
XJJ,вorx -Хд,щ1с"
xN
100,
где д - абсоJ1ютная погрешность; Xn - показание поверяемого при­
бора; х - показание образцового прибора; у- приведенная погреш­
ность в процентах; xr, - нормирующее значение поверяемого прибо­
ра; -Л - поправка; V••P - вариация показаний в процентах.
Та б JI и ц а 5.1. Результаты наблюдений и вычислении
Показ.аш1я
rюверяе-
MOl'O ПРИ•
Показан11я образцовосо прибора х
прн уве-
Абсолютные по,-р�.wности л
при умень- при УВ<'· nрп уменьбора х0,
лнче1-11ш шении иа- пичешш шении наВ(Л)
иалря,..с- пряження uаnряже- n_ряжеиия
(тока),
uия (тока), (тока),
НИЯ (ТО•
В(Л)
В (А)
ка), В(Л)
В(Л)
Прнведениая
nогрешность.
'1', %
Вар11ац•я
показашш
'l'pap•
%
119
Резу;1Ьтаты наблюдений и вычис.1сний записать в табJI. 5.1.
7. По данным опыта и расчетов построить кривую поправок в
зависимости от показаний поверяемого прибора, т. е. -Л=f (Xn )8 Проверить, не превосходят ;ш полу<Jенные погрешности прибо­
ра пределов допускаемых дJ1я него основных абсолютных погрешно­
стей и вариации показаний.
9. Составить отчет по требуемой форме.
ГЛАВА ШЕСТАЯ
ЭЛЕКТРИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ЦЕПИ
6 1. ОБЩИЕ СВЕДЕНИЯ
В современных средствах измерения входной сигнал,
несущий информацию об измеряемой величи11е, часто
испытывает ряд преобразований. Цель этих преобразо­
ваний - привести сигнал к виду, при котором возможно
последующее измерение его информативных параметров
с заданной точностью. Совокупность элементов средства
измерений или измерите.пьного канала, в результате ко­
торой обеспечивается осуществление всех преобразова­
ний измерительного канала, называется измерительной
цепью. Элемент измеритеJ).ьной цепи, в котором осуще­
ствляется одно из ряда последовательных преобразо­
ваний измерительного сигнала, называется преобразова­
тельным элементом (ПЭ). Один или несколько преобра­
зовательных элементов, конструктивно оформленные в
самостоятельное изделие, называют измерительным пре­
образователем (ИП).
Преобразования сигналов могут быть различными:
изменение физической природы сигнала, например
преобразование сопротивления электрической цепи в ток
или напряжение и т. п.;
масштабирование, т. е. приведение сигнала к опреде­
ленному диапазону изменения;
линеаризация - операция, обеспечивающая линей­
ную зависимость между информативными параметрами
входного и выходного сигналов;
фильтрация - отделение сигнала от помех, наложен­
ных на сигнал;
анаJюrо-цифровое преобразование, т. е. преобразова­
ние непрерывной (аналоговой) формы сигнала в циф­
ровой код.
120
Существуют и другие преобразования входных сиг­
на.rюв.
Виды ПЭ и ИП, осуществляющих указанные преоб­
разования, многочисленны. Остановимся на некоторых
из них и рассмотрим наиболее важные свойства, общие
для многих ПЭ и ИП, а также для измерительной цепи
в целом. Рассмотрение вопроса начнем с изучения
свойств простейших ИП, содержащих только один ПЭ.
6.2. ОСНОВНЫЕ УРАВНЕНИЯ И СВОЙСТВА
ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Каждый ИП в измерительной цепи характеризуется
комплексом технико-экономических характеристик, сре­
ди которых выделим для дальнейшего изучения основ­
ные метрологические характеристики - функцию пре­
образования, точность, чувствительность, разрешающую
способность, входное и выходное сопротивления, быстро-
�
Рис. 6.1. Структурная схема
nреобразоваТСJJЯ.
➔
Рис. 6.2. Де.11ителъ напряжения.
действие. Эти характеристики позво.11яют ответить на
вопрос о принципиальной возможности применения дан­
ного ИП для выполнения требуемого измерительного
преобразования в конкретной измерительной задаче.
Функция преобразования ИП. Выделим из измери­
тельной цепи произвольный ИП. Обозначим через х его
входную, а через у - выходную величины (рис. 6.1).
Функция преобразования устанавливает связь между
этими величинами:
у= F (х).
Функцию преобразования называют также характе­
ристикой ИП. Измерительные преобразователи с нели­
нейной функцией преобразования называют функцио­
нальными преобразователями. Примером функциональ­
ного преобразователя может служит лампа накаливания,
121
если ее рассматривать как преобразователь приложен­
ного напряжения в ток, протекающий через лампу. Дело
в том, что увеличение тока в нити накаливания сопро­
вождается повышением ее температуры и сопротивления.
Поэтому зависимость между напряжением, приложен­
ным к лампе, и током, протекающим по ее нити накали­
вания, нелинейна. Другой пример функционального пре­
образователя - полупроводниковый диод.
Зависимость y=F(x) преобразовате.11ей может быть
задача аналитически, графиком или таблицей.
Преобразователи с функцией преобразования вида
(6.1)
у = ах+ Ь,
где а и Ь - постоянные коэффициенты, называют линей­
ными преобразователями. Для линейных преобразова­
телей характерно постоянство коэффициентов а и Ь и их
независимость от значения входной величины х. В таком
случае коэффициент а называют коэффициентом преоб­
разования или коэффициентом передачи входного сигна­
ла на выход преобразователя .
Примером линейного преобразователя может слу­
жить делитель напряжения (рис. 6.2), для которого спра­
вед.11иво
и_
2 -
R2
R1+ R2
U1•
В данном случае a=R2/(R1+R2), Ь=О.
Другим примером .11инейного преобразователя может
служить медный терморезистор, представ.11яющий собой
тонкую медную проволоку, навитую на каркас. Зависи­
мость сопротивления такого преобразователя от окру­
жающей температуры (функция преобразования) описы­
вается уравнением
R8
=
R0 + R0 a.0,
где R е - сопротивление терморезистора при температу­
ре 0° С; Ro - сопротивление терморезистора при 0=
=0° С; а - температурный коэффициент сопротивления
меди (а:=4,25-10-3 1/0С).
В данном случае a=R oa, b=RoB случае линейных цепей при преобразовании посто­
янных токов и напряжений выходные величины строго
пропорциональны входным и коэффициент преобразова­
ния можно рассматривать как постоянную величину.
122
При преобразовании синусоида.JJЬных токов и напряже­
ний в общем случае от.тшчаются не только значения вы­
ходной и входной величин, но и их фазы. Поэтому коэф­
фициент преобразования представляет собой комплекс­
ную неличину и зависит от частоты.
Если изменяется одно из сопротивлений цепи, а на­
пряжение цепи постоянно, то ток в нагрузке и напряже­
ние на ней - функции изменения сопротивления. Такая
цепь является функциональным преобразователем. На­
пример, в цепях постоянного тока изменяющееся сопро­
тивление (входная величина) и выходной ток или напря­
жение связаны гиперболической зависимостью. В цепях
переменного тока зависимость между изменяющимся со­
противлением и выходным током более сложная.
К функции преобразования ИП предъявляются тре­
бования:
1) соответствие реальной функции преобразования
номинальной. Под номинальной функцией преобразова­
ния понимается такая функция преобразования, которая
была заложена в техническом задании на разработку
данного ИП;
2) стабильность во времени, а также при действии
других влияющих ве.11ичин.
Точность измерительного преобразователя. Действи­
тельная функция преобразования ИП отли<1ается от но­
минальной. Обычно это отличие мало, но оно всегда есть.
Степень от.1шчия действительной функции преобразова­
ния от номинальной характеризует точность преобразо­
вания. Точность является качественной характеристикой
ИП. Различают высокую точность или низкую точность.
Общепринятого количественного способа выражения
точности не существует. Для этой цели пользуются по­
нятием погрешность ИП, под которой понимают разность
между его действительной и номинальной функциями
преобразования. Различают поrр.ешности ИП по входу и
выходу. Измерительный преобразователь можно исполь­
зовать для определения входного сигнала по известному
входному. Первый случай характерен д.11я использова­
ния ИП в измерительном канале при передаче измери­
тельной информации, здесь интерес представляет по­
грешность ИП по входу. Во втором случае ИП исполь­
зуется в качестве меры, при этом представляет интерес
его погрешность по выходу. Погрешности ИП классифи­
цируются по признакам, приведенным на рис. 6.3.
123
По способу выражения погрешности ИП разделяют
на абсолютные, относительны е и приведенные.
Абсолютной погрешностью ИП по входу Лх называют
разность между истинными значениями выходной вели­
чины у, приведенной ко входу, и входной величины х:
Лх
ПDUЗHa}(U
}(/IGCCU U}(GЦUU
= уlКном-Х;
погрешности ИП
па способу
fJыражения
ПрufJеде!f­
ные
по uсточни}(!J
{}ознu}(но/Jения
инструмен­
тальные
по причине
и услоtJиям
/Jозникнобения
по хара}(теру
изменения
па зafJucuмocmu
от входной
беличины
Аддитибнь,е
Мультиплu}(а
mиtJlfыe
по зafJucuмocmu
от U/fepцuolflfOCmu
преооразоfJателя
Статические
динамичес­
кие
Рис. 6.3. Класснф1шацня погрешпостеii ИП.
абсолютной погрешностью ИП по выходу Лу называют
разность между значением входной величины, приведен­
ной к выходу, и истинным значением величины, соответ­
ствующей выходному сигналу:
Л у = Кном Х-у,
где Кном - номинальный коэффициент преобразования.
На практике, в связи с тем что истинные значения
неизвестны, пользуются действите.чьными значениями ве­
личин, поэтому найти тоtшое значение погрешности не124
возможно и находят .,шшь оценки погрешностей, но сло­
во «оценка» часто опускают.
Относительная погрешность ИП равна отношению
абсолютной погрешности к истинному значению вход­
ной (бх - по входу) или выходной (бу - по выходу)
величины и часто выражается в процентах:
{5 = Л" 100 б = Лу 100.
х
х
'
у
1/
Приведенная погрешность ИП определяется как от­
ношение абсолютной погрешности к нормирующему зна­
чению входной XN иJ1и выходной YN ве.чичины и выра­
жается обычно в процентах:
л 100.
л 100· '\' = __J/_
'\' = �
х
XN
'
у
YN
Нормирующим называют ус.човно принятое значение,
которое в ИП обыно равно полному диапазону возмож­
ных изменений ВХОДНОГО ( XN) или выходного (y,v) сиг­
нала.
Погрешности ИП делятся на методические и инстру­
мента.чьные. Методические погрешности - это состав­
J1яющие погрешности ИП, обусловленные несовершен­
ством метода измерите.'Iьноrо преобразования. Например,
нелинейный ИП со слабо выраженной нелинейно­
стыо может рассматриваться как линейный ИП, но при
этом всегда будет методиt1еская погрешность, обуслов­
ленная заменой не.чинейной характеристики .чинейной.
Инструментальные погрешности - состав.чяющие по­
грешности ИП, обуслов.r�енные несовершенством его из­
готовления. Например, если в схеме делителя напряже­
ния (см. рис. 6.2) сопротивления резисторов отличаются
от номинальных, то возникает инструментальная состав­
ляющая погрешности коэффициента передачи делитешr.
По причине и условиям возникновения погрешности
ИП делятся на основные и дополнительные. Основная
погрешность - это погрешность ИП в нормальных ус­
ловиях эксплуатации. Предел допустимой основной по­
грешности - это наибольшая основная погрешность ИП,
при которой он может быть признан годным и допущен
к эксплуатации.
Нормальными условиями эксш1уатаuии ИП называ­
ются условия, при которых ВJJИяющие ве.r�ичины имеют
нормальные значения или находятсн в пределах нор125
мальной области значений. Последние устанав.,шваются
в стандартах или технических условиях на ИП данного
типа. Под влияющими величинами понимаются физиче­
ские величины, не являющиеся преобразуемыми данным
ИП, но оказывающие влияние на результат преобра­
зования входной величины. Например, окружающая
тtмпература может изменять сопротивления резисторов
в схеме ИП и, таким образом, изменять его коэффици­
ент преобразования; внешние электрические и магнит­
ные поля создают помехи в цепях ИП, искажающие пре­
образуемую величину, и т. п.
Помимо нормальных условий применения ИП разли­
чают рабочие ус:ювия применения, при которых значе­
ния влияющих величин находятся в пределах рабочих
областей. Рабочие области значений влияющей веш1чи­
ны также устанав.ТJиваются в стандартах ИJIИ техниче­
ских условиях па данный вид ИП, и в этой области нор­
мируется дополнительная погрешность ИП. Таким об­
разом, дополнительной поrрешностыо ИП будем
называть составляющую погрешности ИП в рабочих ус­
ловиях, вызванную отклонением одной из влияющих ве­
личин от нормального значения. Если влияющая ве.тш­
чина выходит за границы значений рабочей области, то
применение данного ИП в таких условиях становится
невозможным.
По характеру изменения погрешности ИП де.чятся на
систематичес1<ие и случайные. Под систематической по­
грешностью понимается составляющая погрешности ИП,
остающаяся постоянной или закономерно изменяющая­
ся. Случайная погрешность ИП - составляющая по­
грешности, изменяющаяся случайным образом. Приме­
ром систематических погрешностей могут служить ме­
тодические погрешности, возникающие при замене
нелинейной функции преобразования линейной, или ин­
струментальные погрешности, вызванные неточной под­
гонкой сопротивлений резисторов, и др. Причинами слу­
чайных погрешностей могут служить различного рода наводки и помехи.
Деление погрешностей ИП на систематические и СЛ}'­
чайные в известной мере носит условный характер. Одна
и та же причина (влияющая величина) может приво­
дить как к систематическпм, так и к случайным погреш­
ностям. Покажем это на следующем примере. Пусть не­
который ИП и спользуется для преобразовання заданной
126
-входной величины в условиях переменной окружающей
температуры. Ес.'Iи время работы ИП мало и окружаю­
щая температура за это время не успевает заметным об­
разом измениться, то погрешность преобразователя, обу­
словленная действием окружающей температуры,
в таком эксперименте будет постоянной и доJ1жна рас­
сматриваться как систематическая погрешность. Если
же ИП работает длительно и окружающая температура
многократно колеблется относительно некоторого сред­
него значения, то погрешность ИП, обуслов.'Iенная коJ1е­
банием окружающей температуры, должна рассматри­
ваться как случайная.
По зависимости от значения входного сигнала по­
грешности ИП делятся на аддитивные, т. е. не завися­
щие от значения входного сигнала, и мультипликатив­
иые, т. е. пропорциональные значению входного сигнала.
Аддитивные погрешности вызываются смещением нуле­
вых уровней ИП. Причинами аддитивных погрешностей
могут быть начальное смещение и дрейф нулевого уров­
ня, например, в измерительных усилителях, действие
терма-ЭДС, шумы и разJшчного рода наводки во вход­
ных цепях ИП и т. п. Источник аддитивной помехи всег­
да можно рассматривать как источник сигнала, не зави­
сящий от значения преобразуемой величины и включен­
ный во входную цепь ИП. Мультипликативные
погрешности вызываются нестабильностью функций пре­
образования ИП. Например, в схеме делителя напряже­
ния (см. рис. 6.2) отклонение сопротивлений резисторов
от номинальных значений вызывает отклонение коэффи­
циента передачи делителя от номинального значения,
что приводит к муJ1ьтипликативной погрешности. Сум­
марная абсо.1ютная погрешность ИП Л1; определяется
суммой абсолютных значений аддитивной Ла и мульти­
пликативной Лм составляющих погрешности:
л:Е = ла + лм .
Рассмотрим в качестве примера ИП усилитель по­
стоянного тока с номинальным коэффициентом усиления
Кuо м (рис. 6.4). Обозначим: Ивх - входное напряжение,
Ивых - выходное напряжение, Ис м - напряжение сме­
щения усилителя. Входным током и инерционностью
усилителя пренебрежем, но допустим, что действитель­
ный коэффю.щент усиления усилителя К отличается от
номинального на значение ЛК. В таком случае Исм вы127
зывает смещение характеристики усилителя: при Иnх=О
Ивых= ИсмК'i=-0, 110 это смещение не зависит от значения
Ивх, следовательно, Исм является источни�юм аддитив­
ной погрешности. При наличии ЛК изменяется крутизна
характеристики преобразоваисм
ния усилителя и появляется
погрешность ИвхЛК, абсолют­
ное значение которой пропор­
ционально значению Ивх- Сле­
довате.nьно,
нестаби.ттыюсть
коэффициента
усиления
явля­
Рис. 6.4. Усилитель постоянется
источником
мультипликаноrо то1<а.
тивной погрешности.
Рассмотрим ИП с характеристикой вида у=Кх. Ад­
дитивная и мультиптшативная составляющие погреш­
ности изменяют характеристи1,у преобразования, 1,ак
показано на рис. 6,5, а и 6. На рис. 6.5, в показано суммар­
ное действие этих погрешностей. На рис, 6.5, г-е пред­
ставлены зависимости абсолютных погрешностей (Л.,,
Лм, Лт. ), а на рис. 6.5, ж-и - относите.11ьных погрешно­
стей ИП (ба , бм, бт.) от входной величины,
у
,1}ла
r-да
}
1 r}��
у
,,,,., м
/,// 1
1
/,,/
f
1
/2;,
V
'х
f
1
х
/
/
1
1
/�}лt
У
/
,l_л
/ ,/J;
1
/ // 1
//
f
1�
"'
з)
Рис 6 5 Графики погрешностей ИП.
а, &, ж
128
- aдд,IТlflJHOii, 6,
д,
3-
.,}Jlb1JIПЛitf(ATHDHOЙ,
о, е, и
- С)'ММарио·.
Относительная суммарная поrрешносrь, приведенна,!1
ко входу ИП, может быть представлена в виде
�
u:E
- '\'а
Л:Е
Лм = 'Va xN + �Uм + '\'а Ла + ==х
х
х
х
= 6м + '\'а - '\'а ( х:
-
1) =С+ d ( х:
- )•
1
rде с = бм + '\'а; d = '\'а ·
Полученная форма выражения суммарной погрешно­
сти часто используется для описания метрологических
свойств прецизионных ИП, например аналого-цифро­
вых ип.
По зависимости от инерционности ИП различают
статические и динамические погрешности.
Статической погрешностью преобразователя называ­
ется постоянная во времени погрешность, не зависящая
от инерционных свойств ИП.
Динамическая погрешность - это погрешность ИП,
вызванная ero инерционностью при преобразовании пе­
ременной во времени величины.
Чувствительность и порог реагирования измеритель­
ного преобразователя. Под чувствительностью ИП по­
нимают отношение изменения сигнала на выходе ИП к
вызвавшему его изменению входного сигнала. Обозна­
чим Лу изменение выходной величины ИП, вызванное
изменением входной величины Лх. Отношение
Лу!Лх = Scp
(6.2)
называется средней чувствительностью ИП на интерва­
ле Лх. Предел, к которому стремится это отношение при
лх-о, называют чувствительностью ИП в точке х:
S = lim Лу = dy •
(6.3)
Лх-+0 Лх
dx
В общем случае входная и выходная величины ИП
могут быть неоднородными, поэтому и чувствительность
ИП в общем случае является размерной величиной. Од­
нако часто эти величины являются однородными, на­
пример в делителях или уси.rштелях напряжения - это
напряжения постоянного или переменного тока. В таких
случах чувствительность ИП является величиной без­
размерной.
9-970
129
В зависимости от вида входной и выходной величин
ИП можно говорить о разных видах его чувствительно­
сти. Например, ес.тш выходная вели•шна ИП электриче­
ская, то можно говорить о его чувствительности по току,
напряжению, мощности, а также о чувствительности ИП
к току, напряжению, сопротив.JJению и т. п., если эти ве­
личины являются входными для рассматриваемого ИП.
Различают абсолютную и относительную чувстви­
тельность ИП. Абсолютную чувствительность рассматри­
вают по (6.2) и (6.3), а относительную по формулам
So = dy или S0
dx/x
= dx/x
dy/y.
Например, чувствительность константанового тензо­
преобразователя (преобразователя деформации в изме­
нение сопротивления) определяется как отношение от­
носите.JJьного изменения электрического сопротив.JJения
тензопреобразователя ЛR/R к относительной деформа­
ции Лl/l. В таком c.JJyчae чувствительность выражается
безразмерным числом, которое для константанового тен­
sопреобразователя равно двум.
Чувствительность ИП зависит от вида его функции
преобразования: если последняя линейна, то •1увстви­
тельность ИП постоянна и не зависит от значения xt
в этом случае S=Scp; если же функция преобразования
ИП нелинейна, то его чувствительность зависит от х и
S=i=Scp• Например, для ИП с характеристикой вида
у=ах+Ь имеем S=a; для ИП с характеристикой вида
у=ах 2 имеем S=2ax.
Под порогом реагирования ИП понимается такое ми­
нималыюе приращение входной величины, которое вы­
зывает уверенно различимое приращение выходной ве­
личины ИП. Дело в том, что смещение нулевого уровня,
собственные шумы ИП, гистерезисные явления в харак­
теристике ограничивают минима.JJьное значение входно­
го сигнала, который может быть преобразован данным
ИП. Поэтому порог реагирования ИП всегда имеет ко­
нечное значение и выражается обычно в единицах вход­
ной величины. Например, усилитель постоянного напря­
жения с коэффициентом усиления К имеет чувствитель­
ность
S
= dU nыxfdV nx = К.
Этот параметр показывает, во сколько раз будет
усилено поданное на вход усилителя напряжение, но не
130
дает ответа на вопрос о том, какое минимальное напря­
жение, поданное на вход усилителя, может быть надеж­
но обнаружено на его выходе. Допустим, что этот уси­
литель в рабочем диапазоне влияющих величин харак­
теризуется нестабильностью нулевого уровня ( его
начальное смещение, дрейф и шумы), значение которой,
приведенное ко входу, не превышает границ +5 мВ. Тог­
да можно сделать вывод, что порог реагирования дан1-юrо усилителя равен ±5 мВ независимо от значения ero
чувствительности (коэффициента усиления).
Входное и выходное сопротивления измерительного
преобразователя. Любой ИП должен преобразовывать
Рис. 6.6. К вопросу о влиянии мощ­
ности, потребляемой ИП, на резуль­
тат преобразования.
а - преобразуемый
сигнал - наnряжещ1 е;
б - преобразуемый сигнал - ток.
u�
е ♦
а)
.�,
ИП
R.наг
5)
входной сигнал с минимальными искажениями. Степень
искажения сигнала в ИП в большой мере зависит от его
входного и выходного сопротивлений. Покажем это на
следующем примере. Пусть ИП с входным сопротивле­
нием Rвх подключается " активному двухполюснику с
выходным сопротивлением R и ЭДС е (рис. 6.6, а). До
замыкания ключа напряжение на выходе активного двух­
полюсника равно ЭДС е, после замыкания ключа это
напряжение уменьшится до значения
U=e�.
Rвx+R
Снижение выходного напряжения произошло пото­
му, что в цепи возник ток, который на сопротивлении R
создал падение напряжения. Именно на это значение от­
носительно ЭДС и уменьшится выходное напряжение
активного двухполюсника, причем снижение выходного
напряжения будет тем больше, чем меньше значение
Rвх- Следовательно, для того чтобы искажение (умень­
шение) выходного напряжения активного двухполюсни­
ка при подключении ИП было минима.11ьным, необходи­
мо потребовать выполнения условия Rвx "';:J>R.
Другой пример. На рис. 6.6, 6 показана схема, со­
держащая ЭДС и последовательно В1'.llюченное сопро9*
131
тивление нагрузки Rnar - Допустим, что ключ замкнут,
тогда ток в цепи равен i1=e/Rпar- Введем в схему по­
следовательно с Rпаг ИП с входным сопротивлением R
(разомкнем ключ). То1< в цепи уменьшится и будет
равен:
.
е
l2=----
Rнaг+R1JX
Очевидно, что новое значение тока в цепи будет мало
отличаться от прежнего значения, если вьrполняегся ус­
ловие Rвх <<RнаrТаким образом, приходим к выводу, что минимизация
искажения входного сигнала в первом случае (рис. 6.6, а)
1 ребует ИП с возможно большим Rвх, во-втором случае
(рис. 6.6, 6) - с возможно малым Rвх, Общим требова­
нием к ИП в обоих случаях явJJяется минимизация мощ­
ности, потребJ1яемой их входной цепью. В самом деле,
при Rвх-�оо в схеме на рис. 6.6, а замыкание или размы­
кание 1;.люча не изменяет выходное напряжение двухпо­
люсника, в схеме на рис. 6.6, 6 при Rвх-О замыкание
или размыкание ключа не изменяет тока нагрузки.
Быстродействие измерительн оrо преобразовате.!IЯ.
Каждый ИП обладает определенной инерционностью:
большей или меньшей - это зависит от принципа дей­
ствия и конструкции ИП. Инерционность ИП не позво­
ляет применять его для преобразования быстроизменяю­
щихся сигналов. Рассмотрим ИП на основе магнито­
электрического измерительного механизма. Такие ИП
применяются в амперметрах и вольтметрах, но они об­
JJадают большой инерционностью, поэтому используют­
ся только в приборах, предназначенных для измерения
постоянных токов и напряжений. Между тем если такой
ИП выполнить с миниатюрной и очень легкой подвиж­
ной частью, т. е. малоинерционным, то его с успехом мож­
но применять для измерения мгновенных значений пере­
менных токов и напряжений в довольно широком диапа­
зоне частот. Примером могут служить гальванометr,ы
светолучевых осциллографов, которые по конструкции
представляют собой механизм ма1·нитоэлектрической си­
стемы, но работают 2 звуковом диапазоне частот
благодаря малой инерционности
подвижной ча­
сти.
Под быстродействием ИП понимается его способ­
ность быстро реагировать на изменение входного сигна132
ла. В настоящее время для характеристики быстродей­
ствия ИП применяется несколько способов.
Взаимосвязь выходного и входного сигналов ИП мо­
жет быть установлена посредством дифференциаJ1ьных
уравнений. Однако такой подход на практике имеет тот
недостаток, что постоянные коэффициенты, входящие в
эти уравнения, трудно точно вычислить или определить
экспериментально. Поэтому для описания искомой за­
висимости часто используют характеристи•1еские функ­
ции, достоинство которых состоит в том, что их легко из­
мерить экспериментально. Для этого на вход ИП подают
специальный тестовый сигнал х, а выходной сигнал ИП
рассматривается как характеристическая функция. В ка­
честве тестовых сигналов используются гармонические
колебания, скачкообразная функция и др. Если тестовый
cиrнaJJ представляет собой гармонические колебания с
постоянной амплитудой Хт и изменяющейся с частотой
ы : x=Xmsin wt, то выходной сигнал ИП как линейного
ИП будет также гармоничес�шм 1<0J1ебанием, но с дру­
гой амплитудой и фазой:
У= У,п sin (wt Q)).
+
Зависимость Ут от частоты при постоянной ампли­
туде входного сигнала называют ампJiитудно-частотной
хара�перистикой, а зависимость Q) от частоты - фазо­
частотной характеристикой ИП.
ДJ1я опи_сания преобразования сигнала в таких ИП
пользуются понятием не коэффициента преобразования,
а передаточной функции, которая является 1<омплекс­
ной величиной и зависит от частоты сигнала.
Повышение быстродействия ИП достигается путем
применения специальных цепей коррекции, позволяю­
щих уменьшить инерционность ИП, отрицатеJJьных об­
ратных связей, аналоговых и цифровых вычислительных
устройств.
6.3. ИЗМЕРИТЕЛЬНАЯ ЦЕПЬ l(AI( ПРЕОБРАЗОВАТЕЛЬ
Во многих измерительных устройствах измеритель­
ную цепь (ИЦ) можно рассматривать как последова­
тельное включение ряда ИП. Существуют ИЦ с парал­
лельным включением ИП, а таюкс с цепями обратной
связи, однако такие ИЦ рассматривать не будем.
Измерительная цепь с двумя последовательно вклю133
ченными ИП представлена на рис. 6.7. Допустим, что
это линейные ИП с коэффициентами передач К.1 и К.2 со­
ответственно. Обозначим через х и z соответственно
входную и выходную величины цепи, у - выходная ве­
личина первого ИП, она же является входной величиной
для второго ИП. Рассмотрим функцию ИП, чувствитель­
ность и погрешность данной цепи.
Функция преобразования устанавливает связь меж­
ду z и х. В данном случае оба ИП линейны и характери�
Рис. 6.7. Измерительная цепь с двумя
. -ILLJ - IL::J� ип.
зуются коэффициентами передачи, следовательно, и вся
цепь будет характеризоваться коэффициентом переда­
чи К Найдем зависимость К от К1 и К.2 :
z
z
у
у
z
К= - =- -=- - =К1 К2 •
х
х
у
х
у
Следовательно, коэффициент передачи ИЦ, состоя­
щей из последовательно включенных ИП, равен произ­
ведению коэффициентов передач отдельных ИП. Этот
вывод остается справедливым при любом числе ИП в
ИЦ. Если число ИП в ИЦ рашю п, то
К= К1 К2 · · ·Кn•
Если отдельные ИП в ИЦ характеризуются переда­
точными функциями, то и передаточная функция ИЦ, со­
стоящая из последовательно включенных ИП, равна
произведению передаточных функций всех ИП дан­
ной ИЦ.
Рассмотрим зависимость чувствительности ИЦ от
чувствительности отдельных ИП:
dz dy
dx dy
dy dz
dx dy
S=- -=- -=S1 S2 ,
где S- чувствительность всей ИЦ; S1, S2 - чувствитель­
ность первого и второго ИП соответственно.
EcJiи число ИП равно п, то аналогичным приемом
можно показать, что
(6.4)
S = S1 S2• • ·Sn,
JЗ4
т. е. чувствительность ИЦ, состоящей из ряда по следо­
вательно включенных ИП, равна произведению чувстви­
тельностей всех ИП, входящих в данную цепь.
Погрешность ИЦ зависит также от погрешностей от­
дельных ИП цепи. Определим эту зависимость. Предва­
рителыю заметим, что при определении погрешности ИЦ
поступают так: погрешности I<аждого ИП делят на ад­
дитивные и мультипликативные, в каждой из них выдеРис. 6.8. Измерительная цель с ис­
точиююм адд итивной погрешно­
сти.
ляют систематические и случайные составляющие и за­
тем суммируют отдельно систематические и случайные
составляющие; в результате получают систематическую
и случайную составляющие аддитивной и мультиплика­
тивиой погрешностей ИЦ; результирующую погрешность
ИЦ определяют как сумму полуt1енных составляющих
погрешности. Рассмотрим этот метод анализа погреш­
ностей на примере ИЦ, со держащей два последователь­
но включенных ИП (рис. 6.8), на входах которых дей­
ствуют источники помех, аддитивных к входному сигна­
лу Е1 и Е2 соответственно (это могут быть смещения
нулевых уровней, шумы, наводки, термо-ЭДС и т. п.).
Аддитивные помехи каждого ИП обычно приводят ко
входу ИЦ. Для рассматриваемой ИЦ приведенная ко
входу суммарная аддитивная помеха Е равна:
Е =Е1 + EiK 1 .
Если ИЦ содержит п ИП, то
Е = Е1 + Е2
К1
+ К1
_§_ + ... +
К2
Er1
Kl к2 • . . Kn-l
•
Абсолютная аддитивная погрешность ИЦ
Ла =х+Е-х=Е,
а ее относительное значение
f) _ Ла _ Е 1
а--;- - -;-
Е2
+ К1х
_ я.
- ua1
+ ua2,
я.
где б а 1=Е1/х - относительная аддитивная погрешн ость
первого ИП; ба2=Е2/ К1х - отпосите.11ьная аддитивная
135
погрешность второго ИП, так как К1 х - это полезный
сигнал на входе второго ИП.
Если ИЦ содержит п преобразователей, ее суммар­
ная относительная аддитивная погрешность
ба = «'>111 + <'>а2 + • • • + б,т
=
!
11
ба}•
(6.5)
1=1
При суммировании погрешностей их разделяют на
систематичес1ше и случайные составляющие. Система­
тические составляющие <'>а.сист I суммируются 2лгебраи­
чес1ш (с учетом знака погрешности каждого ИП):
п
<'>а,с,ист = � ба,еистj•
j=I
Если знаки суммируемых погрешностей неизвестны,
то их обычно складывают арифметически, однако при
большом числе ИП (более трех) такой прием дает силь­
но завышенное значение результирующей погрешности.
Случайные составляющие ба,сп i суммируются в со­
ответствии с правилами суммирования случайных вели­
чин. Если погрешности вида <'>а.сп/ статистически неза­
висимы, ТО
«'>а.ел
= V б;,спl + 8�,сл2 + • · • + �.спп =
V�
«'>а,слi •
/=1
Если же случайные составляющие погрешности вза­
имно зависимы, то их суммирование производится с уче­
том этих связей по более сложным формулам.
tl 4 МЕТОДЫ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ
Под коррекцией понимается выявление погрешнос­
тей и внесение соответствующих поправок для повыше­
ния точности ПЭ, ИП и ИЦ в целом. В настоящее время
известен ряд методов коррекции погрешностей, выбор
того или иного из них определяется зависимостью по­
грешности от режима изменения входной величины
(статические или динамические), характером проявле­
ния погрешности (систематические или СJ1учайные), за­
висимостыо погрешности от входной величины ( ал.ди­
тнвные или мультипликативные), а также от необходи­
мой степени подавления погрешности. Дальнейшее
136
рассмотрение вопроса будем вести на примере коррекции
11огрешностей ИП.
Коррекция заключается в том, что на вход ИП по­
дается тестовый сигнал определенного вида и интенсив­
ности и по реакции ИП на этот сигнал судят о значении
его погрешности, а затем принимается решение о введе­
нии поправки путем регулировки одного из параметров
ИП. Указанные действия могут выполняться оператором
вручную или автоматичесI<и с помощью специальных це­
пей. В пос.1еднем случае метод коррекции называют ав­
томатическим, а цепи, введенные в схему ИП ДJIЯ кор­
рекции, - цепями коррекции.
Коррекция погрешностей широ1<0 применяется в со­
временных средствах измерения, так ка1< позволяет
сравнительно простыми путями добиться повышения их
точности и быстродействия. Ниже рассматриваются наи­
более распространенные методы коррекции погрешно­
стей ИП.
Методы коррекции статических поrрешностей. На
практике наиболее часто встречаются с задачей коррек­
ции аддитивной и мультипликативной составляющих си­
стематической погрешности ИП. Коррекция аддитивной
составляющей погрешности ИП осуществляется следую­
щим образом. Вход ИП отключается от источника вход­
ного сигнала и замыкается накоротко или на резистор с
определенным сопротивлением. Это соответствует подаче
на вход ИП тестового сигнала нулевого уровня. Если в
ИП имеется источник аддитивноi1 погрешности, то выход­
ной сигнал ИП отклонится от нулевого уровня. При руч­
ной коррекции на второй вход ИП подается корре1<Тиру­
ющий сигнал, приводящий выходной сигнал ИП к нуле­
вому уровню. При автоматической коррекции выходной
сигнал ИП запоминается на специальном запоминающем
элементе и в дальнейшем используется в качестве кор­
ректирующего.
На рис. 6.9, а, 6 показано выполнение коррекции на­
пряжения смещения Uсм в измерительном усилителе по­
стоянного тока. Во время коррекции переключатеJ1ь SA
переводится в позицию 2, что равносильно подаче на вход
усилителя тестового сигнала нулевого уровня. Под дейст­
вием Vсм выходное напряжение усилителя отклоняется
от нулевого уровня. При ручной коррекции для обнару­
жения этого отклонения в схему введен вольтметр. Ре­
гулировкой резистора R на второй вход усилителя пода137
ется корректирующее напряжение Uи с таким значени­
ем, чтобы привести выходной сигнал усилителя к ну лево­
му уровню. Затем переключатель SA переводится в по­
зицию 1 и на усилитель подается входной сигнал. Однако
Uсм не остается постоянным во времени и продолжает
медленно изменяться, поэтому коррекцию надо прово­
дить периодически, и тем чаще, чем меньше допускается
ч-
zoisAt Uсм
Uсм
Вхо t
выход
1
а)
SA2
и,\ Q;
6")
Рис. 6.9. Схемы коррекции аддитивной погрешности измерительного
усилителя постоянного тока.
а - при ручной корре�щин; 6 - нри автоматической коррекц1m.
разность Uсм-Ии в процессе измерения. Примером орга­
низации ручной коррекции аддитивной погрешности мо­
гут служить ИП современных вольтметров.
В по1<азывающих приборах различных систем, кроме
электронной, для этого предназначен корректор, управле­
ние которым производится специальным винтом на кор­
пусе прибора. Причина аддитивных погрешностей - из­
менение упругих свойств спиральных пружин или растя­
жек, создающих противодействующий момент. Послед­
ние отличаются высокой стабильностью, и пользоваться
корректором практически приходится очень редко. По­
этому винт I<Орректора выполнен с «уточненным» монта­
жом и его поворот (корре1щия) производится отверткой.
В электронных вольтметрах основным источником адди­
тивных погрешностей является ИП в виде усилителя по­
стоянного тока или диодного детектора, здесь корvек­
цией приходится пользоваться чаще, примерно I раз в
час. Схема коррекции выглядит так, как показано на
рис. 6.9, а, но управление резистором R вынесено на ли­
цевую панель прибора и снабжено удобной ручкой.
В цифровых вольтметрах постоянного тока стабильность
ну левого уровня требуется гораздо более высокая и про•
138
изводить коррекцию аддитивных погрешностей требуется
не реже 1 раза в секунду. В этом случае применяется ав­
томатическая коррекция.
Осуществление автоматической коррекции аддитив­
ной поrрешности измерительного уси.rштеJrя постоянного
тока поиазано на рис. 6.9, 6. В режиме коррекции пере­
ключатель SAJ переводится в позицию 2, а ключ SA2 за­
мыкается, при этом на конденсаторе С выделяется на­
пряжение Ик, примерно равное Исм- При переходе к ре­
жиму измерения ключ SA2 размыкается, переключатель
SAJ переводится в позицию 1 и на усилитель подается
входной сиrнал. Напряжение Ин на конденсаторе С кор­
ректирует Исм- Резистор R в схеме предназначен для
снижения влияния высокочастотных шумов усилителя и
повышает устойчивость его работы.
Коррекция мультипликативной составляющей систе­
матической погрешности ИП необходима в тех случаях,
когда стабильность коэффициентов преобразования от­
дельных ПЭ недостаточна. Осуществляется коррекция
следующим образом. На вход ИП подается тестовый сиг­
нал, значение которого выбирается близким к номиналь­
ному значению входного сигнала, а выходной сиrнал ИП
измеряется. Коэффициент преобразования ИП регулиру­
ется так, чтобы значение выходного сигнала равнялось
произведению входного тестового сигнала на номиналь­
ный коэффициент преобразования ИП.
На рис. 6.10 показано выполнение коррекции мульти­
пликативной погрешности измерительного усилителя по­
стоянного тока. Для выполнения коррекции в схему вве­
дены источник опорного напряжения Ио (тестовый сиг­
нал), переключатель SA и вольтметр V. В режиме
коррекции переключатель переводится в позицию 2 и ре•
rулировкой сопротивления резистора R изменяют коэф­
фициент усиления К усилителя так, чтобы выходное на­
пряжение усилителя приняло требуемое значение Ивых,
при ЭТОМ
К= Квом = UвыxlVo .
Коррекция мультипликативных погрешностей обыч­
но производится гораздо реже, чем аддитивных, посколь­
ку стабильность коэффициентов передач отдельных ПЭ,
как правило, высокая. Поэтому только ИП высокой точ­
ности (например, аналого-цифровые ИП и т. п.) содер­
жат элементы регулировки мультипликативной погреш139
ности, которыми пользуются в процессе эксплуатации
ИП. Например, в конструкциях современных цифровых
вольтметров предусматривается возможность калибров­
ки прибора по встроенному или внешнему нормальному
элементу. Это и есть коррекция мультилликативной по­
грешности аналого-цифрового ИП вольтметра.
Методы J{Оррекции динамичеСJ{ИХ погрешностей. При�
чина возникновения динамичесю1х погрешностей - инер­
ционность ИП. Поэтому коррекция динамических по-
�)sA
� ;-,--1
Рис. 6.10. Схема коррекции
мультнпликативной погрешно­
ст11 измерительного усилителя.
ип
R
Вход
с
Рис. 6.11. Схема замещения
ИП инерционным звеном.
rрешностей ИП заключается в снижении инерционности
ИП и всей ИЦ путем введения специальных корректи­
рующих цепей. Многие ИП (например, усилитель, элект­
ри11ес1<ий преобразователь и т. п.) в первом приближении
можно рассматривать как инерционное звено, которое ха­
рактеризуется постоянной времени Т. На рис. 6.11 пока­
зана схема замещения ИП инерционным звеном с по­
стоянной T=RC. Повышение быстродействия такого ИП
возможно только путем снижения его постоянной вре­
мени. Эта задача решается различными методами - по­
средством корректирующих цепей, аналоговых и цифро­
вых вычислительных устройств, а также с помощью от­
рицательных обратных связей. Принципиально любой из
у1<азанных методов позволяет скорре1<тировать инерцион­
ность ИП очень полно. Однако практически снизить по­
стоянную времени ИП удается только на порядок, т. е.
примерно в 10 раз. Ограничением на пути коррекции яв­
ляется нестабильность элементов постоянной Т. Рас­
смотрим коррекцию динамических погрешностей посред­
ством RС-цепей. Включим последовательно с инерцион­
ным звеном, обладающим постоянной Т, цепь, как пока­
зано иа рис. 6.12. Uепь, содержащую R 1 , R 2 и С 1 , называ140
ют корректирующей цепью. Определим условие коррек�
ции. Обозначим \\',\ (j(J)) и \172 (i(J)) - частотные хара�те,1
ристикн ИП и 1<0рректирующей цепи соответственно. Вы­
разим \V, (j(J)) и \V2(i(I.)) через параметры элементов цепи
(рис. 6.12 ):
ип
R
Рис. 6.12. Схема коррекции
инерционного звена nосредст­
вом RС-цеnи.
w
1
(j(J)) - й2 -
l
1
•
+ jwRC'
- (i1
R
2
_----.!3J:...... l + /wR1C1 •
1 ·
"'W2 (j'·')
_ Uз _
R1( /1roCi)
R1+R2 1-l-jw R1R2 С1
(;2
R2+
R1+R2
R1 +l/jwC1
Частотная характеристика всей цепи W(j(/.)) равна)
t+iwR1 C 1
R2 ------'--'--�_:...1
-W (j(J)) = W1 (iro) W2 (j(J)) = 1 .
+ 1wRC Rct·R2 1 + 1·w R 1 R2 С1
R1+R2
откуда видно, что выбор параметров R 1 и С 1 в соответ ­
ствии с условием R1C1=RC=T позволяет упростить ПО·
следнее выражение:
-
w (i(J))= R_!lJ,_
1+R2 ----R2
.
l+1w--T
R1+R2
Полученное уравнение является частотной характе­
ристикой инерционного звена с эквивалентной постоян­
ной Тзк:
т = R----.!3J:......
т
R
1+ 2 '
ек
откуда Т/Тэк=1 +R 1 /R2.
Таким образом, показанная на рис. 6.12 1юрректирую­
щая цепь позволяет уменьш ить инерционность ИП в
1 +R1/R2 раз. Однако достигается это за счет уменьшения
во столько же раз 1юэффициента передачи всей цепи.
141
Если ИП имеет более сложную схему замещения в
сравнении с инерционным звеном, то применяются цепи
коррекции более сложной конфигурации.
65 МОСТОВЫЕ ЦЕПИ
Мостовые цепи (мосты) применяются для измерений
параметров эJ1ектрических цепей, для преобразования
параметров цепей в элеI<тричесI<ие сигналы, в качестве
фильтров и т д. Мостовые цепи делятся на четырехпле­
чие и мноrоплечие. На рис. 6.13 показана простейшая мо­
стовая цепь - четырехплечий
мост. Мост содержит четыре
комплексных сопротивления Z 1 ,
�2, �з, �4• Точки а, Ь, с, d-­
вершины моста, цепи между
двумя смежными вершина­
ми - плечи моста, а между
двумя противоположными вер­
шинами аЬ или сd-диагона­
ли моста. В одну из диагоналей включается источник питаРис 613 Схема четырех- ния моста (диагональ аЬ), эту
nдечеrо моста
диагональ называют диагональю питания. Другая диаго­
наль содержит нагрузку с со­
противлением Zнаг, ее называют диагональю нагрузки,
выходной или указательной диагональю. В измеритель­
ных мостах в эту диагональ включается сравнивающее
устройство (СУ). В качестве СУ обычно используются
гальванометры. Источник питания моста на рис. 6.13 по­
казан в виде активного двухполюсника с ЭДС Еп и внут­
ренниl\1 сопротивлением �п- Напряжение Uп, действую­
щее на вершинах моста в диагонали питания, называют
напряжением питания моста. Если Zп=О, то Ип =Еп.
Ток и напряжение в диагонали нагрузки обозначены со­
ответственно j1шr и Uнar•
Как видно из рис. 6.13, диагональ нагрузки напомина­
ет мостик, переброшенный между ветвями с сопротивле­
ниями -Z1, -Z2 и Z3, -Z4, отсюда возникло и название - мостовые цепи
В зависимости от вида напряжения, питающего мо­
стовую цепь, различают мосты постоянного и переменно•
142
ro тока. Мосты постоянного тока применяются для изме·
рения сопротивления электрической цепи постоянному
то1<у, а таюке для преобразования сопротивления в ток
или напряжение. Мосты переменного тока применяются
для измерения или преобразования в электрический сиг­
нал комплексных сопротивлений, а также в качестве
фильтров.
Мостовые цепи обладают одним важным свойством при определенном соотношении сопротивлений плеч мо­
ста напряжение и ток в диагонали нагрузки полностью
отсутствуют при любых значениях �п - Такое состояние
моста называют состоянием равновесия, а соотношение
сопротивлений плеч моста, при котором мост уравнове­
шен, - уравнением или условием равновесия моста.
Если в уравнение равновесия мос та входит частота
питающего мост напряжения, то такой мост называют
частотно-зависимым, в противном случае - частотно­
независимым. Частотно-зависимые мосты применяются в
качестве фильтров и для измерения частоты питающего
мост напряжения, частотно-независимые- для измере•
ния параметров электрической цепи или их преобразо•
вания в ток и напряжение.
В процессе измерения мостовая цепь может приво­
диться к состоянию равновесия путем регулировки со­
противлений в плечах моста, такие цепи называют урав­
новешенными. в противном случае - неуравновешенны­
ми. В мостах постоянного тока измеряемая величина
представляет собой сопротивление электрической цепи
постоянному току и выражается действительным числом.
Для уравновешивания та�юй цепи требуется только один
регулируемый элемент. В мостах переменного тока из­
меряемая величина выражается комплексным числом, в
этом случае требуются два уравновешивающих элемен­
та- соответственно для модуля и аргумента или актив­
ной и реактивной составляющих измеряемого сопротивле­
ния. Существуют мостовые цепи, которые уравновеши­
ваются только по одной из этих составляющих. Такие
цепи называют полууравновешенными или квазиурав­
новешенными.
Выразим условие равновесия четырехплечеrо моста
через его параметры. Допустим, что мост (рис. 6.13)
уравновешен, т. е. iнаг=О, Инаг=О при Ип=t=О. Это ВОЗ·
можно только в случае равенства потенциалов точек с
и d. Следовательно, падения напряжения на первом и
143
третьем, а также втором и четвертом плечах моста оди•
наковы:
i1�1 = iз;:
i2�2
= l�!:_4,
Кроме того, iнаг= О, следовательно, i1=i2, iз= i4. Раз­
делив почленно записанные выше равенства, получим
условие равновесия четырехплечего моста
�./!:.2 = !:_зf!:_4
или
(6.6)
Таким образом, если известны значения сопротивле­
ний любых трех плеч уравновешенного моста, то из ус­
ловия равновесия всегда можно определить значение со•
противления четвертого плеча. В дальнейшем будем по­
лагать, что измеряемое сопротивление всегда включено
в первое плечо моста и при Z 1 =Z10 мост уравновешен.
В мостах постоянного тока уравнение (6.6) связыва­
ет действительные величины:
R1o=Rз
R2
Ri
•
О бычно такой мост приводится к равновесию путем
регулировки сопротивления R3 • Отношение сопротивле­
ний R2/R 4 в уравнении равновесия называется масштаб.
ным множителем, его значение выбирается равным lOn,
где п - целое положительное или отрицательное число
(возможно n=O). В этом случае третье плечо моста на•
зывают плечом уравновешивания, а второе и четвертое плечами отношения. С помощью плеч отношения выби­
рается диапазон измерения моста.
В мостах переменного тока уравнение (6.6) связыва­
ет комплексные величины и в зависимости от формы их
представления может иметь различный вид:
Z to ei'Pta _ Zч i<p, . R 1o+iX 10 _ Rв+ /Хз
z2 e1fft - z4 е1'Р• ' R2 + iX2 - R4 + jX4
Отсюда можно выразить искомые величины:
z10 elQ>,o
144
= z3
z l<
.
: e 'l'•+'P,-Q>.); R10+1X 10 = (Rз
z
R + jX�
+ /Х ) R,a
+ jX,a
з
2
Два комплексных числа равны только тогда, 1югда
равны их модули и аргументы или действительные и мни­
мые части. В соответствии с этим положением каждое из
полученных уравнений распадается на два равенства.
Для первого уравнения эти равенства имеют вид:
(6.7)
Из (6.7) видно, что уравновешивание мостов перемен­
ного тока требует регулировки как минимум двух вели­
чин - модуля и фазового угла или действительной и мни­
мой составляющих уравновешивающего сопротивления.
На практике широ1юе применение получили мосты, у
которых два плеча содержат только активные сопротив­
ления, а два других - реактивные. Для таких мостов на
основании (6.7) можно утверждать:
1) если активные сопротивления находятся в смеж­
ных плечах, например Rз и R4 (рис. 6.14, а и 6), и Q)з=
D)
Рис. 6.14. Схемы мостов переменного тока.
а - ВКJ!ЮЧенис катушек нндукт11ш1ости в смежные nлечн; 6 - в1<mочсние кон­
ценсi.tторов в смежные плеч.и; в - включение катушек индуктивности и кон"
дснсатора в протнвоположиые ппсчн.
=q>4=O, то два других плеча должны содержать либо
индуктивное, либо емкостное сопротивление, чтобы вы­
полнялось равенство Q)1o=Q)2;
2) если активные сопротивления расположены в про­
тивоположных плечах, например q>2=q>3= О (рис. 6.14, в),
то другие плечи должны содержать: одно - индуктив­
ность, другое- емкостное сопротивление, чтобы имело
место равенство q>10=-q;4.
Уравновешивается мост попеременной регулировкой
двух его параметров, в качестве которых обычно выбира­
ют регулируемые резисторы, так как они проще изготав­
ливаются и стоят дешевле конденсаторов с регулируемой
10-970
145
емкостью и магазинов индуктивностей. Например, в схе­
ме рис. 6.14, а это могут быть резисторы R2 и Rз. Уравне­
ние равновесия такого моста имеет вид:
R10
+ jffiL
10
= Rв R2 + jffi Rз L2•
R4
R
4
Первоначально регулирошюй R2 добиваются равенст­
ва действительных частей уравнения, затем регулировкой
Rз - мнимых. Однако Rз входит и в выражение для дей­
ствительной части, его регулиров1<а в процессе выравни­
вания мнимых составляющих в уравнении равновесия
моста нарушает первоначальное условие R1o=RzRз/R4.
Поэтому в процессе уравновешивания приходится выпол­
нять ряд регулировок сопротивлений R2 и Rз, чтобы при­
вести мост в состояние равновесия. Свойство моста, оп­
ределяющее число необходимых регулировок для его
уравновешивания, называют сходимостью моста. Если
мост обладает хорошей сходимостью, то он быстро при­
водится к равновесию. Сходимость зависит от конфигу­
рации схемы моста, выбора регулируемых параметров и
соотношения между активными и реактивными парамет­
рами схемы.
Существуют мостовые цепи, в которых уравновешива­
ние производится в одних случаях только либо по моду­
лю, либо по фазовому углу (6.7), в других случаях- по
активной или реактивной составляющим измеряемого
сопротивления. Тюше мосты называют полууравновешен­
ными; в них применяются специальные сравнивающие
устройства, реагирующие на изменение той величины, по
которой мост уравновешивается.
Широко применяются, особенно в области электричес­
кю< методов измерения неэлектрических величин, не­
уравновешенные мосты. Последние обычно регулируемых
элементов не содержат. В них о значении измеряемой
величины судят по току или напряжению в диагонали
нагрузки. Однако зависимость эта нелинейная, она уста­
иавливается теоремой вариации параметров электриче­
ской цепи в виде
•
[наг
аЛZ
=-1+ьл �,
(6.8)
где Л?:_ - изменение измеряемого сопротивления; а и Ь постоянные коэффициенты, значения которых зависят о
т
значений сопротивлений моста.
146
В мостах постоянного тока уравнение (6.8) связываеt
действительные числа и может быть представлено графи�
чески в виде гипербо.11ы (рис. 6.15). Аналогичный вид
имеет и зависимость Инаг=f (ЛR). Зависимости lнar=
=(р(ЛR) и Инаr=f(ЛR) оказываются нелинейными пото•
му, что изменение сопротивления в плече моста неизбеж­
но сопровождается изменением тока, протекающего по
Рис. 6.15. Кривая зависимости
lu ar=f(ЛR).
Рис. 6 16. Схема компенсацион•
ной цепи.
нему, т. е. в схеме моста одновременно изменяются два
параметра - сопротивление и ток, протекающий по нему.
При малых ЛR, когда справедливо условие bЛR<t;::. 1, не­
линейностью функции преобразования моста часто пре•
небреrают, но при этом всегда возникает методическая
погрешность, вызванная заменой нелинейной зависимо·
сти lнar=(f) (ЛR) линейной.
6.6. КОМПЕНСАЦИОННЫЕ ЦЕПИ
Компенсационные цепи предназначены для сравнения
двух независимых напряжений или токов нулевым мето­
дом (методом 1юмпенсации). Компенсационные цепи для
сравнения токов имеют относительно узкую и специаль­
ную область применения, поэтому они далее не рассмат­
риваются. Простейшая схема компенсационной цепи с
компенсацией напряжений показана на рис. 6.16. Если
ЭДС Е1 и Е2 и параметры схемы связаны соотношением
.
.
Е1 = Е2
Z1
-
�1 +!2
то напряжение и ток в цепи сравнивающего устройства
отсутствуют, т. е. схема уравновешена, а записанное
10*
147
уравнение является условием равновесия. Это ус.тювие
Ьтличается от условия равновесия мостовой цепи тем, что
в него помимо параметров цепи входят и действующие в
ней ЭДС. Если известны значения Е2, Z1 и Z2, то из ус­
ловия равновесия можно найти значение- Е 1-;- при этом
важно подчеркнуть, что в уравновешенной схеме ток в
цепи СУ отсутствует, следовательно, на выводах 1=1'
будет действовать ЭДС Е1 независимо от значения сопротивления �- К.омпенса­
uионные цепи леж ат в ос•
нове устройства современ­
ных цифровых вольтметров
и компенсаторов.
Компенсаторы, иногда их
называют
потенциометра­
Gзt
ми, - это приборы для из­
мерения напряжения и свяо------'
занных с ним величин, дей·
ствие I<оторых основано на
компенсационном методе из­
мерения. В зависимости от
Рис 6.17. Упрощенная схема вида измеряе мого напряжеаюмпенсатора постоянного тока. ния различают компенсато·
ры постоянного и перемен­
ного TOI<a.
Упрощенная схема компенсатора постоянного тока
показана на рис. 6.17. Под действием ЭДС источника пи­
тания Е в схеме компенсатора возникает рабочий ток /р.
Этот ток, протекая через сопротивление R, создает на
нем компенсирующее напряжение Ии, которое посредст­
вом сравнивающего устройства СУ (переключатель SA4
находится в позиции Х) сравнивается с измеряемым
напрнжением Ux. Регулиров1юii U" добиваются состояния
равновесия в схеме, т. е. вьmолнения условия U,, =U1{•
О значении Uх. судят по известному значению Ин. Точ­
ность измерения U" полностью определяется точ­
ностью значения Ии и точностью его сравнения с Ux.
В свою очередr,, точность Uи зависит от точности уста­
новю1 рабочего тока и точности изготовления регулируе­
мого резистора R. Последний в современных компенса­
торах выполняется в виде многодекадного магазина со­
противлений, выполненного с высокой точностью.
Рабочий ток устанавливается регулировкой сопротив­
ления резистора Rp так, чтобы выполнялось равенство
148
их+
/rflo=Eнэ, где Енэ- ЭДС нормального элемента. Это
равенство устанавливается по отсутствию тока в СУ, пе­
vеключатель которого SA4 во время установки рабочего
тока переводится в позицию НЭ. Поскольку ЭДС нор­
мального элемента и значение Ro известны с высокой точ­
известно с высокой
ностыо, то и значение /р =Енэ/R0
точностью. Часть резистора Ro на рис. 6.17 показана ре­
гулируемой. Дело в том, что ЭДС Енэ зависит от окру­
жающей температуры. Указанная зависимость не очень
сильная, но она есть и надо позаботиться о том, чтобы
колебания окружающей температуры не влияли на точ­
ность установки /р. Это условие достигается регулиров•
кой Ro - Допустим, что в результате отклонения 01<ружаю­
щей температуры от нормального значения ЭДС Енэ
увеличилась на 0,02%, тогда, увеличив и Ro на 0,02%,
получим неизменное значение тока /р, Установленное
значение /р должно оставаться неизменным в течение
времени, необходимого для измерения Ux, следователь­
но, источник этого тока (ЭДС Е) должен отличаться
высокой стабильностью напряжения во времени. В точ­
ных компенсаторах источником ЭДС Е служат высоко­
стабильные источники напряжения, в компенсаторах
средних и низких классов точности - сухие батареи.
В качестве СУ обычно используются гальванометры.
Защита rальвано:-.1етра от перегрузок производится с по­
мощью защитных резисторов, количество которых обыч­
но равно двум: Rз1 и Rз 2 (рис. 6.17). Резистор Rз1 �
� 20 МОм включен постоянно и применяется при грубом
уравновешивании Ux с по:1-ющью старших декад резисто­
ра R. В компенсаторах невысокой точности Rз 1 обычно
отсутствует. Кнопкой SA 1 включается резистор Rз2 , со­
противление которого выбирается равным 50 или
450 кОм, и производится уравновешивание Их регулиров­
кой средних декад резистора R. При переходе к точному
уравновешиванию Их младшими декадами резистора R
замыкается кнопка SA2 и гальванометр включается в
цепь непосредственно, реагируя на малейшее отклонение
разности Их-Ик от нуля. После тщательного уравнове­
шивания схемы обе кнопки SAJ и SA2 размыкаются, за­
тем считывается результат измерения. Нормальное по­
ложение кнопок SAJ и SA2- разомкнутое, при этом
гальванометр защищен от возможных случайных пере­
грузок. Кнопка SАЗ предназначена для успокоения под•
вижно й части гальванометра, если в его цепи прошел
149
большой импульс тока, и подвижная часть находится в
колебательном режиме.
Компенсаторы выпускаются следующих классов точ­
ности: 0,0005; 0,001; 0,002; 0,005; 0,01; 0,02; 0,05; 0,1; 0,2;
0,5. Наибольшее напряжение, которое возможно изме­
рить компенсатором непосредственно, 2,12111 В.
Порядок работы с компенсатором и ero применение.
При работе с 1юмпенсатором рекомендуется следующая
последовательность действий:
1. Ознакомиться с описанием заданного типа компен­
сатора и инструкцией по его эксплуатации.
2. Убедиться, что кнопки SAJ, SA2, SA3 (рис. 6.17)
разомкнуты, а пере1<лючатель SA4 находится в нейт­
ральном положении.
3. Установить рабочий ток компенсатора, для этого:
а) подк.пючить к компенсат()ру батарею Е и нормаль­
ный элемент, тщательно соблюдая полярность подкJJю­
чения элементов;
б) по значению окружающей температуры вычислить
поправку на значение ЭДС нормального элемента и уста­
новить значение в соответствии с найденной поправкой;
в) включить осветитель гальванометра и установить
корре1<тором положение светового указателя на нулевой
отметке шкалы;
г) перевести переключатель SA4 в положение НЭ,
замкнуть кнопку SAJ и регулировкой резистора RP уста­
новить указатель гальванометра на нулевую отметку
шкалы;
д) замкнуть кнопку SA2 и регулировкой резистора
R P тщательно установить указатель гальванометра на
нулевую отметку ш1<алы;
е) разомкнуть кнопки SAJ и SA2, когда требуемый
рабочий ток 1юмпенсатора установлен и можно присту­
пать к измерению Uх4. Измерить значение Ux :
а) если известно ориентировочное значение Их, то
переключатели резистора R установить в соответствии с
этим значением;
б) подключить измеряемое напряжение к выводам
Их, соблюдая необходимую полярность;
в) перевести переключатель SA4 в положение Х и,
если в схеме компенсатора имеется резистор Rз1, регу.11и•
ровкой старших де1<ад резистора R установить указатель
гальванометра на нулевую отметкуj
J50
г) замкнуть кнопку SAJ и регулировкой средних де­
кад резистора R установить указатель гальванометра на
нулевую отметку; если в схеме компенсатора R эi отсут­
ствует и значение Uх заранее не известно, то первона­
чальное в1<лючение кнопки SA 1 следует производить в
виде кратковременного нажатия, чтобы не создавать
перегрузку гальванометра в случае большой разницы
Ux -Uи;
д) замкнуть кнопку SA2 и регулировкой младших
декад резистора R тщательно уравновесить схему - уста­
новить указатель гальванометра на нулевую отметку, ес­
ли при этом потребуется осуществить переключение в
средней или старшей декадах, то кнопку SA2 следует
разомкнуть;
е) перевести переключатель SA4 в положение НЭ и
убедиться в том, что рабочий ток компенсатора остался
неизменным; если же рабочий ток изменился, то регули­
ровкой резистора RP восстановить прежнее значение то­
ка и, переводя переключатель SA4 в положение Х, вновь
уравновесить схему;
ж) разомкнуть кнопки SAJ и SA2 и по положению ру­
чек управления декад магазина сопротивлений R прочи­
тать результат измерения.
К:омпеисаторы постоянного тока применяются для точ­
ных измерений ЭДС, напряжений и других величин, ко­
торые могут быть преобразованы в напряжение постоян­
ного тока, а также для поверок показывающих прибо­
ров - амперметров, вольтметров, ваттметров.
При измерении больших напряжений применяют де­
лители напряжения (рис. 6.18); с их помощью расширя­
ют пределы измерения компенсатора до 1000 В. Делите­
ли напряжения обычно имеют коэффициенты деления
1: 10; 1 : 100; 1: 1000 при полном сопротивлении делителя
до 10 МОм. Однако при этом теряется важное достоинст­
во компенсационного метода - отсутс твие тока, отбирае­
мого от источника Ux, при равновесии схемы. К:ак видно
из рис. 6.18, независимо от равновесия в схеме ток от ис­
точника Uх всегда будет протекать через делитель на­
пряжения.
При измерении ток пропускается через образцовый
р езистор R o, и измеряется напряжение на его зажимах
Uo . Значение искомого тока находят из выражения/х=
=Uo/R0•
При и змерен ии соп ротивления Rx последнее включа151
ется последовательно с образцовым резистором Ro, зна­
чение сопротивления которого одного порядка с R x . По
цепи пропускается стабильный ток J, и компенсатором
измеряют значения U0 и Их (рис. 6.19). Так как Их=
=IR x , Vo=f R o, то, разделив почленно записанные ра­
венства, получим:
R:x = Ro И:х .
Uo
К источнику тока / (рис. 6.19) предъявляется требо­
вание высокой стабильности во времени, поскольку зна-
llx fOM
Ro
Rx
Рис. 6.19. Схема для измерения
э11ектр11ческого соп ротив.чеюlЯ
компенсатором.
�
Рис. 6.18. Схема де.1m1-е1rя на•
nряжения, подкшоченного к
компенсатору.
чения U0 и Их измеряются последовательно во времени и
BIOl{HO, чтобы ток при этом не изменялся.
Компенсаторы переменного тока. Идея компенсации
измеряемого напряжения в процессе измерения положе­
на в основу компенсаторов переменного тока. Здесь, так
же как и в компенсаторах постоянного тока, измеряемое
напряжение с помощью сравнивающего устройства срав­
нивается с компенсирующим напряжением, значение ко­
торого регулируется так, чтобы имело место равенство
V:x = Ии.
Синусоидально-изменяющаяся величина в математи­
ке выражается вектором. Если значения амплитуды, час•
тоты и фазы этой величины постоянны, то она представ­
ляется вектором, положение которого на плоскости по•
стоянно и неизменно. Вектор определен в случае, когда
известны его модуль и фаза или две проекции на задан­
ные взаимно перпендикулярные оси. В соответствии с
этим положением компенсирующую величину также мож­
но формировать двумя путями: задавая модуль и фазу
152
нли две проекции на взаимно перпендикулярные оси. Та­
IШМ образом, возможны два пути создания компенсато­
ров переменного тока: 1) с регулируемыми модулем
и фазой компенсирующего напряжения; такие компенса­
торы называют полярно-координатными; 2) с двумя ре•
гулируемыми напряжениями, сдвинутыми по фазе на 90°;
такие компенсаторы называют прямоугольно-координат­
ными. Практическое распространение по.r�учили прямо­
угольно-координатные компенсаторы.
Принципиальная схема прямоугольно-координатного
компенсатора показана на рис. 6.20. В ней можно выде­
лить два контура. Первый содержит вторичную обмотку
питающего трансформатора Т, амперметр, регулиру �мый
6)
Рис. 6.20. ПрямоугоJ1ыю-коорд1111атиый 1юмпе11сатор.
а - nринц1111иальиая схема; б - Ве.{ТОрuая .циаrрамма.
резистор Rp 1, перщ1чную обмотку катушки взаимной ин­
дуктивности М, реохорд Rt, второй - вторичную обмотку
катушки М, регулируемый резистор Rp2 и реохорд R2 .
Под действием питающего напряжения в первом
контуре возникает ток i,, значение которого контролиру­
ется амперметром и устанавливается регулировкой Rp 1.
Этот ток создает на реохорде R, падение напряжения й,,
которое по фазе совпадает с током i,. Магнитный поток
Ф катушки взаимной индуктивности совпадает по фазе
с током i, и наводит во вторичной обмотке катушки ЭДС
Е2, отстающую по фазе от тока i, на 90° : E2 =-j(J)M/�.
Реактивное сопротивление второго контура пренебрежимо мало, поэтому ток i2 практически совпадает по фазе с
ЭДС Ё2, а от тока i, отстает на угол 90°. Следовательно,
153
падение на пряжения на реохорде R2, совпадающее по фа­
зе с током i2, сдвинуто относительно напряжения на рео­
хорде R 1 также на угол 90°. Регулировка тока /� произ­
водится резистором R p2• Ток /� зависит от значения ЭДС
Е2 и сопротивления второго контура. Последнее постоян­
но, а ЭДС Ё2 зависит от тока i1 и частоты питающего
напряжения. Значение тока 1 1 контролируется ампермет­
ром А, поэтому, если известна частота питающего напря­
жения, контролировать значение / 2 не нужно, достаточно
установить R p2, соответствующее частоте питающего на­
пряжения. Поэтому переключатель регулируемого резис­
тора R p2 градуирован в з начениях частоты питающего
компенсатор напряжения.
Для того чтобы вектор компенсирующего напряжения
можно было получить в любом из четырех квадрантов,
средние точки реохордов О и О' электрически объедине­
ны. Если двиЖОJ{ любого реохорда проходит через сред­
нюю точку, то фаза выходного 11апряжения этого реохор­
да изменяется на 180°. Полученные напряжения пред­
ставлены векторами, расположенными по осям топогра­
фической диаграммы (рис. 6.20, 6). Допустим, что движ­
ки находятся в положении, показанном на рис. 6.20, а,
тогда напряжение li между ними представляет геомет­
рическую сумму векторов i.J 1 и U2 . Модуль этого напряжения U = Ui + V�. а угол q,=arctg U2/U1.
Точность измерения напряжения компенсатором пере­
менного тока при условии, что компенсатор уравновешен,
зависмт от точности компенсирующих напряжений V 1 ,
U2 и точности угла сдвига между ними 90°. Точность на­
пряжений U 1 и U2 зависит от точности установки рабочих
токов / 1 и / 2 и точности изготовления реохордов. Отсут­
ствие точной меры переменной ЭДС, подобной нормаль­
ному элементу, приводит к необходимости установки ра­
бочего тока компенсатора с помощью амперметра. Меж­
ду тем класс точности амперметров не лучше, чем 0,1 или
0,2, поэтому и точность компенсаторов переменного тока
невысока.
Отечественная промышленность выпускает компенса­
тор переменного тока типа Р56/2, предназначенный для
измерения ЭДС, напряжений, фазовых углов и других
параметров, которые могут быть преобразованы в про­
порциональные им ЭДС и напряжения. Класс точности
v
V
154
прибора 0,2; пределы измерения для составляющей по
каждой оси координат - от О до 0,16 В и от О до 1,6 В.
Номинальный диапазон частот прибора составляет 4060 Гц. Рабочий ток 0,5 А.
Следует иметь в виду, что форма компенсирующего
напряжения синусоидальная, а сравнивающее устройство
настроено в резонанс на частоту этого напряжения. Ес­
ли компенсатор работает на промышленной частоте 50 Гц,
то в качестве сравнивающего устройства обычно исполь­
зуется вибрационный гальванометр. Поэтому при изме­
рении напряжений несинусоидальной формы показание
компенсатора будет соответствовать значению основной
(первой) гармоники, частота которой совпадает с часто­
той питающего компенсатор напряжения.
6.7. ЛАБОРАТОРНАЯ РАБОТА Nv 3. ИЗМЕРЕНИЕ
СОПРОТИВЛЕНИИ ОДИНАРНЫМ МОСТОМ
В данной работе посредством одинарного моста измеряются
сопротивз1ения двух резисторов прн различных вариантах их вклю•
чения, а также входное сопротнвз1еш1е двух вольтметров.
Задание
1. Ознакомиться с приборами, предназначенными для вьmол•
нения работы, и указаниями по пх экспJiуатации. Внести в протокол
паспортные данные приборов.
2. Проверить возможность применения имеющейся аппаратуры
для решения поставJ1е11ной измерительной задачи.
3. Зарисовать при11цнпназ1ьиые схемы имеющихся на стенде
мостов.
4. Измерить одним из мостов сопротивление каждого нз двух
заданных резисторов.
5. Соеди.ии1ъ резисторы последовательно и измерить их общее
сопротиВJ1ение.
6. Соединить резисторы паразтельно и измерить их общее со­
противление.
7. Найденные Э!{сперимеитальиым путем в п. 5 и 6 значения со.
противлеиий проверить расчетным путем по формудам
R,х = Rх1
+ R:,:2;
Rте" _
-
Та б з1 и ц а 6.1
.,
�
"'
"',,.
,; "'
<;
.с, ::i::
о:Е
oi
о:,;
�'
о:Е
о:Е
+
�
=
oi
�-
ri
Ra, Rx2
Rx1 Rх2
+
"
�
�
�
"'
�
"..
:;.,
<:Е
;..
"
...."'
�."
�
...!"
.."'"'.,
,,.
�
"'
i::
В качестnе числоnых зиаченщ1 R�1 и RA"2 взять результаты пзме­
ре11ия из п. 4.
8. Определип, входное сопроrивлснне двух вольтметров Rвr,
указанных преподавателем. Выч11сJшть входной ток каждоrо из
nольтметров при номииа.'!Ьном наnряжеинн lвх = Ииом/R.х­
РезуJiьтаты набJ1юдеиий и расчетов представить в виде табли•
цы (табJ1. 6.1).
9. Составить отчет по требуемой форме.
6 В. ЛАБОРАТОРНАЯ РАБОТА .№ 4. ИЗМЕРЕНИЕ
ИНДУК ТИВНОСТИ И ЕМКОСТИ
МОСТОМ ПЕРЕМЕННОГО ТОКА
В даыюii работе посредством моста переменного тока нзмеря•
ются параметры катушки индуктивности и конпснсатора.
Задание
1. Ознакомип,ся с приборами, предназначенными для вьmолие­
ния работы, и указаниям11 по их эксплуатации. Внести в прото1юл
паспортные данные приборов.
2. Проnерить возможность применения имеющейся аппаратуры
для решения постав:,енной нзмеритеJrыюй задачи.
З. Зарисовать принципиаJrьиые схемы имеющихся на сте11де мос­
тов.
4. Опредет1ть 11ндуктивность Lx и добротность Q" заданноr1
катушки индуктивиости.
5. ОпредеJшть емкосn, С" и тангенс угла потерь tgб" заданного
КО!lденсатора.
РезуJiьтаты наблюдений представить в виде таб1шцы (табл. 6.2).
т.-.б л и ц а 62
�111!
.N• наблюде- 1
Х.' 11
L
сх ,
мкФ
Примеч1111ие
6 Составить отчет по требуемой форме.
69. ЛАБОРАТОРНАЯ РАБОТА .№ 5. ПОВЕРКА ПРИБОРОВ
ПРИ ПОМОЩИ КОМПЕНСАТОРА ПОСТОЯННОГО ТОКА
В д анной работе производится поверка nольтыетра и ампермет­
ра посредством компенсатора постоnнноrо тока. Работа содер�нт
соотnетствешю две части.
Ч а ст ь 1. ПОВЕРКА ВОЛЬТМЕТРА
Поверка nольтметра состоит n сраnиенин показаний поверяемо­
го вольтметра и 1юмпенсатора, щ,дкщочеиных к одному источнику
напряжения, причем показание компенсатора принимается за дей156
ств11те.пьное значение напряжения. Сравнеа�не производится нs. 11сех
чнсJювых отметках вольтметра.
Задание 1
1. Ознакомиться с приборами, предназначенными дJ1я выпо1ше­
н11я работы, и указаниями по их эксплуатации. Внести 13 протокол
паспортные данные приборов.
2. Проверить возыожнос1ъ применения имеющейся аппаратуры
JIJIЯ решения поставленном измерительной задачи.
3. Зарисовать принципиальную схему включения приборов.
4. Собрать схему и показать ее для проверки руководителю.
5. Про11звестн поверку всех чнсJювых отметок вшалы 1юJrьтмет­
ра: регулировкой напряжения устаиовнть указатель вольтметра точ­
но на числовую отметку шкалы, затем компенсатором измерить
значение напряжения на выводах волы·метра. Указаш1ую процеду­
ру провести дJIЯ всех 1шсловых отметок шкаJIЫ вольтметра.
6. Опреде11ить абсошотные проrрешност11 Л, приведенные по­
грешно сти в процентах V, а также поправки - Л для поверяемого
вольтметра по формулам
л
Л=Vv-U; v=-v-IOO;
N
-Л=V-Uv,
где UN- нормирующее значение вольтметра.
7. Результаты набJJJодений и расчетов представить в внде таб­
JUЩЬ! (табJI. 6.3).
Т а б JI и ц а 6.3
No ваблюдени/1
Показание.
nопьтмет-
ра Uy
(3
Поrр,ешности
Поназа�rнс
комленса- абсолют• приведентора U, В ная Л, 1Э ! ная 1', %
Полра�эка
-л. в
ПримеtJание
8. Сделать заключение о соотnетствии вольтметра своему клас­
су то1,иости.
9. Составить отчет по требуемой форме.
Часть 2. ПОВЕРКА АМПЕРМЕТРА
П6верка амперметра заключается в сравнении показаний ам­
перметра 1л с действите;1ь11ым значением тока /, протекающего через
амперметр. ПосJJедовательно с поверяемым амперМL'Тром вюJ.ючается
образцовый резистор с сопротивлением R0• По это й цепи пропускает­
ся ток, а напряжение U0 на потенцИаJIЬнЫх nыводах Ro измеряется
компенсатором. Действительное зиа 11енне тока находят ка!{ отноше­
ние резуJ1ьтата измерения U0 к сопротпnле111110 R o (J=Uo/Ro).
Задание 2
1. Ознакомиться с приборами, пред11аз11аче11ными ДJIЯ выпоJше­
ния работы, и указаниями по их экспл)'атации . .Внести в протокол
паспорrные данные приборов.
157
2. Пр<Jверить возможност ь nримеиеиия имеющейся аппаратуры
для решения поставленной изыернтеJ1ыюй задачи.
3 Зарисовать принципиальную схеыу включения приборов.
4. Собрать схему и показать ее для проверки руководителю.
5. Произвести поверку всех числовых отметок шкалы ампермет­
ра. ДJIЯ этого регулировкой тока установить указатель амперметра
точно на нужную отметку шкаJ1ы и компенсатором измерить зна­
чение Ио; указанную процедуру выполннть на всех числовых отмет­
ках r.uюJJIЫ.
6. Определить абсоJiютиые погрешности д, nриведениые поrреш.
11осп1 в процентах у, а также поправки - д для поверяемого ампер­
метра по формулам
у= -Л/
- 100; - Л = / - /А ,
1N
где /N - нормирующее зна•1е1ще амперметра.
7. РезуJiьтаты наблюдений и расчетов представить в виде таб•
л1щы (табл. 6 4).
Табл иц а 6.4
.,о
"'..
"f
,,;
"'с:
��
"'
"'
о: о.
�t
��<
xg
i:::о ., _-0:
:,
Значения
Действнте.аьное
вна-чение
U" В I R.0• Ом тока/, А
Погреwност11
приоеабсолютная 1 деннал
Л. А
Попрал-
ка-Л,
А
При-
мечаIOie
у.%
8. Сдела1ъ закщочеиие о соответствии амперметра своему классу
то•тости.
9. Составить отчет no требуемой форме.
ГЛАВА СЕДЬМАЯ
РЕГИСТРИРУЮЩИЕ ПРИБОРЫ
7.1. ОБЩИЕ СВЕДЕНИЯ
Во многих слусrаях при контроле различных техноло­
гических процессов и проведении научно-исследователь­
с1шх работ необходимо знать не только значение, но и
изменение какой-либо физической величины во времени.
Если изменение измеряемой величины во времени необ­
ходимо знать в одной-двух точках за небольшой интер­
вал времени, то можно произвести отсчет значений из158
меряемой величины по обычному показывающему при­
бору через определенные интервалы времени и затем,
что не представляет уже большого труда, построить
график изменения интересующей нас физической величи­
ны. Такой способ получения графиков изменения изме­
ряемой величины во времени соверше}IНО непригоден, ес­
ли необходимо знать изменение контролируемых
величин во многих точ­
ках в течение длитель­
ного времени
( смена,
Рис. 7.1. Структурная схема
регистрирующего прибора.
сутки и т.д.). В этом случае на помощь приходят
регистрирующие измерительные приборы, т. е. при­
боры, в которых предусмотрена регистрация показаний.
Регистрирующие приборы, так же как и обычные
аналоговые показывающие приборы, могут быть разде­
лены на две группы: регистрирующие приборы прямого
действия и регистрирующие приборы сравнения. В дан­
ной главе рассматриваются аналоговые регистрирующие
приборы прямого действия.
На рис. 7.1 приведена структурная схема такого ре­
гистрирующего прибора. На вход ИЦ подается элек­
трическая величина х. Если необходимо вести регистра•
цию изменения какой-либо неэлектрической величины,
то в этом случае перед регистрирующим прибором необ­
ходимо включить соответствующий первичный преобра­
зователь, который и преобразует контролируемую не­
электрическую величину в электрическую.
Измерительная цепь преобразует электрическую ве­
личину х в ток/, достаточный для приведения в дейст­
вие измерительного механизма. Угол поворота подвиж­
ной части измерительного механизма ИМ преобразует­
ся в перемещение указателя по шкале прибора в отсчет­
пом устройстве ОУ (ОУ в некоторых регистрирующих
приборах может отсутствовать) и в перемещение регист­
рирующего органа относительно носителя в регистри­
рующем устройстве РУ. В качестве носителя обычно ис­
пользуется специальная бумажная лента с нанесенной
диаграммной сеткой. Таким образом, регистрирующий
орган перемещается nропорционально значению изме159
ряемой величины и производит на носителе регистрацию
результатов измерения в виде линий или точек.
Если регистрирующий измерительный прибор произ­
водит запись изменения измеряемой величины на носи­
теле в форме диаграммы, то такой прибор в соответствии
с ГОСТ 16263-70 называется самопишущим измеритель­
ным прибором. Самопишущие приборы по допустимой
частоте изменения регистрируемого эJ1ектрическоrо сиг­
нала делятся на две группы:
1) обычные самопишущие приборы, регистрирующие
электрические сигналы, частота изменения которых
не превышает 1 Гц (на такие приборы распро•
страняется ГОСТ 9999-79 );
2) быстродействующие самопишущие приборы, пред­
назначенные д.11я регистрации электрических сигналов,
частота изменения которых превышает 1 Гц (приборы
выпускаются s соответствии с ГОСТ 19875-79).
К аналоговым регистрирующим приборам прямого
действия относятся также светолучевые осциллографы,
предназначенные для регистрации электрических сигна­
лов с помощью светового лvча на специальных свето­
чувствительных носителях, и магнитографы, предназна•
ченные для регистрации быстро изменяющихся электри­
ческих сигналов посредством магнитной записи на
магнитных лентах.
Вопросы, связанные с регистрацией с помощью маг­
нитографов, в данной главе не рассматриваются.
7.2. МЕТОДЫ РЕГИСТРАЦИИ
Методы регистрации обеспечивают выполнение ряда
основных требований, предъяв.11яемых к регистрирующим
устройствам. К таким требованиям относятся:
J) наглядность, видимость результата регистрации;
2) возможно меньшая погрешность регистрации из­
за конечных размеров наносимых на носитель символов;
3) возможно более высокое быстродействие, а следо­
вательно, и более широкий частотный диапазон регист­
рирующего устройства;
4) возможно большая длительность работы без п�­
резарядки и подналадки.
В настоящее время известно большое число различ­
ных методов регистра1...,чш. Рассмотрим основные группы
этих методов.
160
Методы регистрации с нанесением слоя вещества на
носитель. К этой группе методов относятся сJ1едующие
методы регистрации: карандашный, чернильный, чер­
нильный струйный, с применением пасты в шариковом
устройстве, с применением пасты под давлением, копи­
ровальный, печатный и т. д. Наиболее распространен­
ным является чернильный метод регистрации.
В ка,zестве регистрирующего органа РО при данном
методе регистрации используются специальные перья
(рис. 7.2), у которых наконечник представляет собой
трубку, часто платино-иридиевую, с внутренним отверстием
РО
диаметром 0,1-0,15 мм. По этому отверстию на носитель Н, пе•
ремещающийся со скоростью v,
Рис. 7.2. Регистрнрующнй орган н 11оси­
теJ1Ь при чернильном методе регuстрациu.
н
и
поступают специальные чернила. Достоинствами чер­
нильного метода реrистраuии являются:
1) малое воздействие со стороны регистрирующего
органа на подвижную часть измерительного механизма;
2) высокое качество оставляемого на носителе следа;
3) относительно большая длительность работы без
перезарядки (в современных приборах- до 30 сут);
4) долговечность регистрирующего органа.
Однако чернильный метод регистрации имеет и ряд
существенных недостатков:
1) необходимость применения специальных чернил,
в состав которых входят дистиллированная вода, анили­
новый краситель, глицерин, глюкоза, фенол;
2) замерзание и высыхание чернил;
3) засорение внутреннего отверстия реrистрирующе•
го органа;
4) необходимость использования специальной бумаги
в качестве носителя;
5) относительно большая ширина линии записи (0,40,5 мм).
В последние годы все шире начинают применять ме­
тоды, в которых используется паста в шариковом устрой•
стве и паста (чернила) под давлением.
Существенным недостатком метода с испоJ1ьзованием
шарикового устройства является то, что при малых ско11-970
161
ростях перемещения носителя, например при v=20 мм/ч
( J мм за 3 мин), паста на шарике успевает высохнуть и
четкая регистрация не получается.
Метод с использованием пасты (чернил) под д�вле­
нием требует применения специального миниатюр�ного
компре�сора, создающего давление, изменяющееся при
изменении скорости перемещения носителя.
Следует отметить, что карандашный метод регистра­
ции, который на первый взгляд кажется простым и эф­
фективным, применяется очень редко, так как при этом
методе возникают относительно большие усилия на по­
движную часть измерительного механизма со стороны
регистрирующего органа.
Меrоды регистрации со снятием слоя вещества. Наи­
большее распространение из методов регистрации со сня­
тпем слоя вещества rюлучилн плавильный и резцовый
методы.
При плавильном методе в качестве регнстрирующего
органа РО (рис. 7.3, а) используется наrJ?етый до высо-
Рис. 7.3. Реrнстрнрующиil орган и носитель.
а - 11ла1щJ1ьныi! метод регистрации; 6 - резцовы11 метод регистрации.
,,,
кой температуры стержень или нихромовая спираль. Носнтель - специальная бума:жная лента, обычно черного
цвета, покрытая тоню-1м слоем парафина или воска с
мелом. При соприкосновении такой бумажной ленты с
нагретым регистрирующим органом слой парафина или
воска расплавляется и на ленте остается •1ерный четко
видимый след.
Основным недостатком плавильного метода являет­
ся необходимость изменения степени нагрева регистри­
рующего органа при изменении скорости перемещения
носителя. Несмотря на этот недостаток, данный метод
весьма прогрессивен и получает все большее применение
при разработке новых регистрирующих приборов.
При резцовом методе регистрации (рис. 7.3, б) в ка162
честве регистрирующего органа применяется игла из
тnердого материала, например корунда. Носитель обычная глянцевая черная бумажная лента, покрытая
тоюп-1е слоем парафина с мелом или очень тонким слоем
(10-15 мкм) напыленного металла. При перемещении
регистрирующего орга1-1а по носителю, который в свою
очередь движется со скоростью v, тонкий слой покрытия
счищается. На носителе остается след в виде сплошной
линии толщиной 50-100 мкм.
Резцовый метод регистрации при метаЛJ1ическом по­
крытии носителя позволяет применять регистрирующие
приборы в тяжелых климатических условиях при повы­
шенной точности регистрирующего устройства.
Методы регистрации с изменением состояния nещест­
nа. Методы регистрации с изменением состояния веще­
ства применяются значительно реже, чем методы регист­
рации с нанесением и со снятием слоя вещества.
Наиболее распространенным методом регистрации с из­
менением состояния вещества является метод регистра­
ции, при котором световым лучом осуществляется воз­
действие на светочувствительный носитель. Этот метод
регистрации широко применяется в светолучевых осцил­
лографах. Совершенно очевидно, что в этом случае обя­
зательно должен быть источник светового излучения,
а на подвижной части измерительного механизма долж­
но быть укреплено небольшое зеркальце, отражающее
лvч света на носитель.
· В качестве источника светового излучения могут при­
меняться обычные лампы накаливания или специальные
ртутные лампы высокого давления, являющиеся мощ­
ным источником ультрафиолетового излучениrJ. В пер­
вом случае в качестве носителя используется обычная
фотопленка или бумажная фотолента, требующая для
получения видимого результата регистрации специаль­
ной химической обработки (проявления и закрепления).
Во втором случае в качестве носителя используется спе­
циальная бумажная фотолента типа УФ, чувствительная
к ультрафиолетовым лучам и не требующая последую­
щего химического проявления. Фотолента типа УФ обес­
печивает получение видимой записи после кратковремен­
ного воздействия на нее обычного светового потока. Та­
ким образом, во втором случае нет необходимости
в «мокрой» обработке носителя и поэтому этот способ
регистрации весьма перспективен.
11*
163
К методам регистрации с изменением состояния ве­
щества относится также метод регистрации на магнитной
ленте, применяемый в магнитографах.
7.3. ВИДЫ ДИАГРАММНЫХ ЛЕНТ
В аналоговых регистрирующих приборах прямогu действия, как
правило, применяются в 1<ачест1Зе иосителеi1 различные диаграммные
ленты и только в некоторых слу•1аях могут быть нрименены диаг­
раммные диски. Технические требования к ним сформуJШрованы в
гост 7826-75.
Различают три вида диаграммных лент.
1. Диаг раммные ленты тниа ЛR (рис. 7.4 а). Они им еют криво­
линейную систему координат и предназначены для регистрирующих
а)
/JO
.,,,,...__
о
о
о
о
о
о
о
о
о
о
о
/JO
-,
о
о
о
о
о
о
о
о
о
о
'-.
' о о о о о о о о о
1
о о
о о о о о о о
о
о о
1Т
Рпс. 7.4. Диаграммные ленты.
а - т11ла ЛR. б - т,mа ЛПГ; в - т1111а ЛПВ.
приборов с перемещением регистрирующего органа в горизонталь­
ной плоскости по дуге окружности. Отсчет значения зарегнстрпро­
ванной величины производится с помощью специальной масштабной
линейки II вертикальных линий, называемых шшиями отсчета. При
пользовании масштабной линейкой нуль лпней,ш совмещается с ну­
левой линией диаrращ,1ы. Отсчет интервалов времени производится с
помощью лпннй временн, распо.�оженных rорнзонта.'lьно II проведен­
ных по дуге ок�,ужности.
2 Диаграммные ленты типа ЛПГ (рис. 7.4, б), имеющие пря­
моугольную систему координат с прямолинейными горизонтально
расположенными л.иннями времени. Такие ленты предназначены длн
регистрирующнх при�оров с прнмо.rшнейным перемещением регнст­
рнрующего органа в горизоиталыюi'! nлоскости. Отсчет значения
зарегистрированной величины производптся без масщтабной линей­
l<И с помощью вертикально расположенных лпиий отсчета.
Очевидно, что прпмеиение диаграммных лент типа ЛПГ тре­
бует налпчнл в регистрирующем приборе спецнальноrо пр11способле11пя, пресбраэующеrо вращательиvе щшжение подвижной части из­
мерительного меха1шзма в линейное перемещение регистрирующего
оргаJ1а.
164
3. Дпаграммиые ленты тнпа ЛПВ (рис. 7 4, в} с прямолинеi'�нымн
в ертикально расположенными линиями времен11. Они предназначены
для реrнстрац1111 11зменения измеряемой величины в прямоугольной
системе координат в реrистрнрующнх приборах, имеющих реrистри­
рующнй орган, перемещающийся прямоJшнейно в вертикальной nлос­
I{ОСТП.
Д11аграммные ленты могут быть с перфорацией, как это изоб­
ражено на рис. 7.4, так и без нее. В этом случае к наименованию
дuаграммной ленты добаВJшются буквы Б и П: ЛRБП; ЛПГБП н
ЛПВБП. Ширина поля записи диаrраммных лент может uыть от 40
до 400 мм.
7.4 РЕГИСТРИРУЮЩИЕ УСТРОЙСТВА
Рассмотрим разновидности устройств, соединяющих регистри­
рующий орган с подвижной частью измерительного механизма.
Предположим, что в качестве измерительного механизма использу­
ется ма�·ю�тоэлектрическнй измерительный механизм с внутрира­
мочным магнитом и регистрация 11роизводится наиболее распрост­
раненным черюrльным методом.
Различают два шща устройств: устройство с непосредствениын
соединеШiем регистрирующего органа с подвижно/! частью 11змер11тельного механизма (рис. 7.5 а) и устройство, в котором регистри­
рующий орган соедюmется с подвижной частью измерительного
механизма посредством так называемого спрямляющеrо устрой­
ства куJшсиоrо тюrа (рис. 7.5, б).
5
CI}
ин
Рис. 7.5. Регистрирующие устройства при испот,зовании черни.rrьно-.
ro метода регистрации на диаграммных лентах.
а - типа ЛR;. б - типа ЛПГ.
165
В первом случае (рис.7.5, а) рычаг 1 укрепляется на рамке
измерительного механизма ИМ. lla рычаге размещается I<апилляр­
ная трубка 2, соединенная одним концом с расположенным на кон­
це рычага регистрирующим органом РО. Другой конец трубю1 2
опущен в неподвижную чернильницу 3 со специальнымн чернилами.
Нетрудно видеть, что при вращатеJ1ьном движении подвижной части
измеритеЛI,ного механизма регистрирующий орган будет переме­
щатьсу� по дуге окружности и, следовательно, рассматриваемое
!УСтроиство, достаточно простое по конструкции, может производнть
запис,, толыю на диаrра"1мных лентах т ипа ЛR, доставляющих опе­
ратору известные неудобства при расшифровке результатов реrн­
страr(ии.
В устройстве, 11зображен110"1 на р11с. 7.5, б, ры•1аr t, жестко сое­
динснныi'r с рамкой нзмерительиого мехаю1зма ИМ, 11:-.�еет шарнирное
соединение с держа1елем 2. На держателе 2 укреплена капил­
лярная трубка, один !(Онец 1<оторой опущен в неподвижную черють•
ипцу 3, а др) rой соединен с регнстриfующим органом РО. На кон­
це держателя 2 укреплен ролик 4. lри вращательном движении
рамки 11з'v!ерителыюrо механизма ролик 4 совершает возвратно-по­
ступательное двнжеиие по неподвижиы\1 направляющим S_ !Iетруд1ю видеть, 11то прu этом ре1·истрирующ11й орган перемещается в за­
висимости от длнны держателя 2 практическн по прямой лпнни.
Регистрация изменения пз111еряемой величины производится в
прямоуr·олыюй системе координат на диаграммной ленте типа ЛПГ.
Расшифровка результатов реrистрацни в прямоуrо.%ной системе
координат достаточно проста, одна�ю применение спрямляющего
механщма имеет и ряд недостат1<ов: ус,nожияется конструкция ре­
rнстрнрующего устройства, что увеличивает стоимость прибора;
}Увелю1ивается момент 1шераш1 подвшкной части, что ухудшает
часТ<Уl'Ные свойства прибора; увеличнвается мо�ент трении, что тре­
бует применения пзмернтельных механ11змов с большнм вращающим
t.юментом.
Длп получения развертки во времеии днаграммuые ленты !(ак
в первом, так II во втором случае необходимо перемещать со ско­
ростью CJ. Длп этого в рсr·истрнрующнх приборах прнменяютсн
J1ентопротяжные механизмы. Ila рнс. 7.6, ц схематнчно показан
Jiентоnротяжный механизм для диаграммных лент с перфорацией.
Вед)ЩИЙ барабан 1 с выступа,1и для отверстий диаграммных лент
приводнтся в движение с 1юстоннноi1 скоростью через редуктор от
специального синхронного двигателя. Сменой шестерен реду!(тора
можно измеиять, в определенных пределах, частоту вращения бара­
бана 1. Диаграммная лепта чистая с мнниыальной длиной 15 м по•
мещается на свободно вращающейся съемной !(атушке 2. Диаграм­
мная лента с записью •1ереа направляющий ролик 3 поступает на
лентособирающую кат),шку 4, которая приводится в движение от
ведущего барабана 1 посредством фршщионной цепной передачи 5.
К держателю или рычагу 6, соединенному с подвижной частью из­
мерительного механиз�1а, прн наличии отсчетноrо устройства укреп­
ляется указатель 7, обеспечивающий визуальный отсчет показаний
по шкале 8.
На рис. 7.6, б схематично поr,азан лентопротяжный механизм
для диаграммных лент без перфорации. В этом случае перемеше­
РИе днаrраммной ленты осуществляется ведущим барабаном 1, не
имеющим нш,юшх выступов. Во избежанне проскал1,зыванш1 диаг­
раммной J1енты прижим ее к поверхности ведущего барабана ОСУ•
]66
ществляетси двумя пршю:мным и роликами 2. Лентособнрающая
1<атушка 4 приводнтсн в двнжеипе посредством: фрикционной пере­
дачи 3. Регистрирующий орган перемещается по неподвижной опоре
5, 110 кот орой движется днаграммная лента со съемной катушки 6
через направляющие ролнкн 7 на ведущий барабан 1.
Рис. 7.6. Лентопротяжные механизмы для диаграммных лент.
б - без перфорации.
а - с перфорацпеи;
7.5. САМОПИШУЩИЕ ПРИБОРЫ ПРЯМОГО ДЕАСТВИЯ
Большинство выпускаемых промышленностью регист­
рирующих приборов прямого действия - самопишущие
приборы, т. е. приборы, регистрирующие изменение из­
меряемой величины на диаграммной ленте.
В зависимости от допустимой частоты изменения ре­
гистрируемого электрического сигнала различают две
группы приборов.
Первая, большая группа приборов, выпускаемых в
соответствии с ГОСТ 9999-79, предназначена для регист­
рации медленно изменяющихся сигналов с частотой из­
менения до 1 Гц. В приборах этой группы используются
два вида измерительных мехаиизмов - магнитоэлектри­
ческий измерительный механизм и ферродинамический
измерительный механизм. Это обусловлено тем, что ука­
занные механизмы имеют относительно большой вра­
щающий момент, который необходим в регистрирующих
приборах в связи с дополнительным моментом трения в
регистрирующем устройстве.
Промышленностью выпускаются амперметры и вольт-
метры магнитоэлектричес1юй системы для регистрации
изменений постоянного тока и напряжения (приборы ти­
га Н392); амперметры и вольтметры ферродинамической
системы типа Н393 для регистрации изменений перемен1-юго тока и напряжения частотой 50 Гц; выпрямитель­
ные амперметры и вольтметры (приборы типа Н394) для
регистрации изменений переменного напряжения и тока
повышенной частоты (до ] О ООО Гц); ват�·метры и вар­
метры однофазные и трехфазные с ферродннамическим
измерительным механизмом (типов Н395 и Н396); час­
тотомеры (типа Н397) и фазометры (типа Н398) с вы­
прямительными преобразователями. Все перечисленные
выше типы приборов являются щитовыми приборами с
размерами фланца корпуса l60XJ60 мм.
Однако промышленностью выпускаются и переносные
комбинированные самопишущие приборы с встроенными
для повышения чувствительности усилителями. Приме­
рами таких приборов являются магнитоэлектрический
многодиапазонный прибор типа Н399 и вьmрямительный
комбинированный прибор типа Н339. Благодаря усили­
телям эти приборы могут регистрировать изменения от1-юсительно малых токов (милли- и микроамперметры)
11 относительно малы х напряжений (доли милливольт).
Все регистрирующие приборы данной группы имеют
отсчетпые устройства. Классы то<шости самопишущих
приборов по измеряемой величине определюотся по ос­
новной приведенной погрешности, которая находится не
по по1<азаниям, а по записи. При применяемом черниль­
ном методе регистрации и ширине поля записи использу­
емых диаграммных лент типов ЛПГ и ЛПГБП L=
= ]00 мм, классы точности самопишущих приборов этой
группы 1,0; 1,5 и 2,5, запас t1ернил рассчитан на 30 сут
непрерывной работы. (В приборах старых модификаций
запас чернил был рассчитан на 3 сут.) Лентопротяжные
механизмы приборов обеспечивают перемещение носите­
лей со следующими скоростями: 20, 60, 180, 600, 1800 и
5400 мм/ч. Класс точности самопишущих приборов по
записи времени определяется основной относительной
погрешностью и обычно бывает 0,5 или 1,0. Все приборы
этой группы- одното11ечные одноканальные.
Вторая группа приборов (быстродействующие само­
пишущие приборы) предназначена для регистрации бы­
стро изменяющихся электрических сигналов с частотой
изменения более 1 Гц. В качестве измерительных меха168
ннзмов в приборах этой группы используются механиз­
мы с относительно большой частотой собственных коле­
баний подвижной части f0 • К таким измерительным ме­
ханизмам относятся специальный магнитоэлектрический
измерительный механизм с двумя магнитами (внешним
и внутренним), имеющий значение f0 �40 Гц, и электро­
магнитный поляризованный механизм с fо�бО Гц. Элек­
тромапштный поляризованный механизм по сравнению
с мап-штоэJ1ектрическим имеет не только большее зна­
чение частоты собст­
венных колебаний под­
вижной части, но и не­
большую массу, малые
габариты и невысокую
стоимость.
На рис. 7.7 схема­
тически показана кон­
струкция современно­
го электромагнитного
поляризованного меМеханизм Ф..
ханизма.
Ф..
неразборныь, так как
постоянные магниты
1 н магнитопроводы 2
с обмотками управле­
ния укреплены внутри
корпуса 4 эпоксидным
2
Рис. 7.7. Электромагнитный
поляризованный
измери­
те.1JЬиыi'! t!еханпзм.
компаундом. Обмотки управления включаются последо­
вательно и по ним пропускается ток /, изменение кото­
рого необходимо зарегистрировать. Потоки, создаваемые
обмотками управления Фу, замыкаясь через якорь 3, вы­
полненный из магнитомягкого материала, придают его
торцам свойства магнитных полюсов. В результате вза­
имодействия намагниченных т0рцов ,�коря с подмагни­
чивающими потоками ф_ создается вращающий момент,
пропорциональный потоку управления, а следовательно,
и току /. Противодействуюший момент создается мощ­
ными спирадьными пружинами.
169
Отсqетные устройства в быстродействующих самопи­
шущих приборах (БСЛ) отсутствуют, так как скорость
поступления измерительной информации превышает пре­
дельные возможности непосредственного отсчета показа­
ний оператором.
Погрешность приборов определяется по основной
приведенной погрешности записи в процентах ширины
поля записи. (В выпускаемых промышленностью прибо­
рах ширина поля записи равна 40 или 80 мм.) На по­
стоянном токе эта погрешность обычно не превышает
±4%. Приборы выпускаются как одноканальными, так
и многоканальными. Так, БСП типа Н338 могут иметь
1, 2, 4, 6 и 8 каналов. В многоканальных приборах ре•
гистрация производится на одном носителе, но с раз­
личными диаграммными лентами типа ЛR для каждого
канала.
Применяются чернильный метод регистрации (при­
боры типов I-13021, I-1327, 1-1338) и плавильный метод ре­
гистрации (приборы типа Н338Б).
В приборах типа 1-1338 несмотря на применение элек­
тромагнитного поляризованного механизма с fo � 60 Гц
диапазон рабочих частот находится в пределах от О до
150 Гц. Это объясняется те>,т, что у данного типа прибо­
ров, так же как и у БСП типа Н327 с диапазоном час­
тот 0-100 Гц, имеется встроенный усилитель с неJ1иней­
ной выходной харю<терисншоii, позволяющий расширить
частотный диапазон всего прибора в целом, т. е. приме­
няется так называемый метод активной коррекции час­
тотных характеристик прибора.
В приборах типа НЗО21 с магнитоэлектрическим из­
мерительным механизмом и встроенным усилителем
максимальный диапазон рабочих частот 0-45 Гц.
Основным достоинством быстродействующих прибо­
ров является возможность визуального наблюдения хо­
да исследуемого динамического процесса по документу
регистрации в относительно широком диапазоне частот.
7.6. СВЕТОЛУЧЕВЫЕ ОСЦИЛЛОГРАФЫ
Светолучевые осциллографы относятся к регистри­
рующим приборам прямого действия. Регистрация про­
изводится обычным световым лучом или ультрафиолето­
вым лучом на специальном фоточувствительном носите­
ле, не имеющем диаграммной сетки.
170
Достоинствами светолучевых осциллографов по срав-.
ненпю с широко распространенными электронно-лучевы­
ми осциллографами являются:
простота и удобство получения документа регистра­
ции, особенно при регистрации на носителе типа УФ;
возможность одновременной регистрации на одном
носителе многих (до нескольких десятков) исс.r1едуемых
динамических проuессов.
Основными достоинствами светолучевых осци.тшоrра­
фов по сравнению с ранее рассмотренными регистриру­
ющими приборами прямого действия яв.т�яются бо.т�ее ши­
роrшй диапазон частот регистрируемых электрических
сигналов (от О до 30 ООО Гц) и возможность одновре­
менной регистрации существенно большего чисJJа сигна­
лов.
Технические требования к светолучевым осциллогра­
фам сформулированы в ГОСТ 9829-81.
В качестве измерительных механизмов в светолуче­
вых осциллографах испо.т�ьзуются миниатюрные маrни­
тоэ.т:�ектрические измерительные механизмы, называемые
осциллографическими rа.т:�ьванометрами. Технические
требования к осциллографическим гальванометрам (ОГ)
сформулированы в ГОСТ 11013-81.
Основными узлами светолучевых осцил.�юrрафов яв­
ляются магнитный б.т:�ок с осциллографическими гальва­
нометрами, оптическая система, развертывающее уст­
ройство и отметчик времени.
Кратко остановимся на основных уз.т�ах светолучевых
осци.т�.тюграфов.
Магнитный блок с осциллографическими гальвано­
метрами. В светолучевых осциллографах прежних вы,
пусr<ов применялись так называемые автономные ОГ.
Такой ОГ имел собственный постоянный магнит, в воз­
душном зазоре магнитопровода которого размещалась
подвижная часть, выполненная в виде пет.rш (петлевые
ОГ) или в виде рамки на растяжках (рамочные ОГ).
В бо.т:�ьшинстве современных светолучевых осциллогра­
фов автономные ОГ не применяются, а применяются ос­
циллографические гальванометры-вставки, не имеющие
собственного постоянного магнита с магнитопроводом.
Гальванометр-вставка (рис. 7.8, а) представляет собой
подвижную часть магнитоэлектрического измерителыю­
rо механизма (подвижная рамка на растяжках), за­
rшюченную в металлический немагнитный кожух с по171
люсными наконечниками из маrнитомяrкого материа.r�а.
Обычно внешний диаметр кожуха равен 6 мм. Гальва­
нометры-вставки помещаются экспериментатором в воз­
душные зазоры магнитопровода одного бо.11ьшого посто­
янного магнита. Выпускаемый промышленностью маг­
нитный б.r�ок типа Ml062 имеет в магнитопроводе гнезда для размещения од­
новременно 12 раз.r�ич­
ных ОГ с шагом в
9 мм.
3
4
Основными требо­
@
ваниями, предъяв.11яе5 мыми к осци.11.11огра2
f
3
Рис. 7.8. Осциллографичес­
кий rальnаиометр.
а - общий вид; 6 - nодnижиая
часть 1·альванометра с обмо ro•l
8) ным усnокоеиием; в - подnиж·
иая часть rа"тt.ьвзиометра с кар�
касным ycnor<oeuиeм.
4
а)
5)
фическим гальванометрам и существенно в.11ияющими и
на их конструктивное оформление, являются:
1) возможно больший частотный дапазон, а с.r�едо­
вате.Т\ьно, и возможно бстьшая частота собственных ко­
лебаний подвижной части f0;
2) достаточно высокая чувствительность к току S1;
3) возможно меньший диаметр вставки д,Т\Я уве.тшче­
ния чис.Т\а одновременно устанав,Т\иваемых ОГ.
Значения fo и Sr можно опреде.11ить по с.11едующим
форму лам:
(7.1)
(7.2)
где k - постоянный коэффициент; S; - чувствите.'lь1-юсть механизма ОГ к току (см. § 1.4 и 5.2).
Нетрудно видеть, что первые два требования к осцил­
лографическим rа.r�ьванометрам противоречивы. Действи­
тельно, д!IЯ увеличения значения f0, опреде.Т\яемоrо
(7.1), необходимо увеличивать уде.'lьный противодейст­
вующий момент W. Однако уве.'lичение значения W, как
это видно из (7.2), ведет к уменьшению чувствительно112
сти S 1• Для увеличения чувствительности S1 же.т�ате .1JЬно
увеличение чис.т�а витков w, однако это ведет к увеличе­
нию момента инерции подвижной части и, как видно из
(7.1), к уменьшению значения fo. В связи с этим про­
мыш.тrенность выпускает достаточно бо.1JЬшое чис.rю раз­
личных типов ОГ и их модификаций.
На рис. 7.8, 6 и в показано конструктивное оформ­
ление подвижных частей двух наибо.тrее распространен­
ных рамочных ОГ. На рис. 7.8, 6 изображена подвиж­
ная часть ОГ с маrнитоиндукционным обмоточным и.тrи
жидкостным успокоением. Вращающий момент, так же
как и в обычных маrнитоэ.тrектрических механизмах, со­
здается взаимодействием исследуемого тока / в рамке
/, растянутой на б.тrоках 2 с помощью растяжек 3, и по­
.тrя постоянного магнита. Мом ент успокоения создается
взаимодействием rю.тrя постоянного магнита и тока lу сп,
возникающего в цепи рамки от ЭДС, индуцированной в
рамке прп ее движении. Очевидно, что ток /усп, а с.тrедо­
вательно, и момент успокоения будут зависеть при обмо­
точном успокоении в первую очередь от сопротив.тrения
цепи с рамт<0й. Оптима.тrьным моментом успокоения счи­
тают такой момент успокоения, который обеспечивает
при заданной допустимой не.тrинейности амп.rштудно-час­
тотной характеристики наибо.тrьшую рабочую по.т�осу ча­
стот ог.
Не.тrинейность амп.тrитудно-частотной характеристики
ОГ с обмоточным успокоением в соответствии с ГОСТ
11013-81 должна быть не более ±5% в диапазоне частот
от О до О,бОfо (+10% в диапазоне от О до 0,75f0}.
Успокоение ОГ обычно характеризуют коэффициен­
том 13, называемым степенью успокоения (см. § 5.4}.
Оптима.тrьное успокоение получают при 13=0,7-;-0,8.
Из сказанного с.тrедует, что у ОГ с обмоточным успо­
коением в паспорте до.тrжно указываться значение внеш­
него сопротив.т�ения, при 1<0тором обеспечивается опти­
ма.т�ьное значение 13, а с.т�едовате.тrьно, и наибо.тrьшая воз­
r,южная рабочая по.тrоса частот.
При жидкостном успотюении подвижная часть ОГ
за.тrивается специальной жидrюстью. Конечно, у такого
ОГ присутствует и обмоточное успокоение, однако жид­
косrное успокоение прева.т�ирует над обмоточным. успо­
коением и поэтому :внешнее сопротив.тrение у таких ОГ
во многих с.тrучаях может быть .тrюбым. Вязт<ость приме­
няемых жидкостей зависит от температуры окружающей
173
среды. Поэтому в современных свето.rrучевых ocци.rr.rro­
rpaфax д.rrя обеспечения оптимального значения � при­
меняют термостатирование.
На рис. 7.8, в показана подвижная часть ОГ с маr­
нитоиндукционным каркасным успокоением. Рамка 1
намотана па алюминиевой п.r1астинке 5 с отверстиями
для растяжек 3. При движении рамки в п.r1астинке воз­
никают вихревые токи, которые, взаимодействуя с по­
лем постоянного магнита, и создают момент успокоения.
Каркасное успокоение всегда превалирует над обмоточ­
ным успокоением, и поэтому ОГ с каркасным успокое­
нием, так же как и ОГ с жидкостным успокоением, мо­
гут работать при оптимальном значении � независимо от
значения внешнего сопротивления rа.rrьванометра.
Нетрудно видеть, что ш1астинка при каркасном ус­
покоении существенно увеличивает момент инерции под­
вижной части rа.1Jьванометра и ухудшает его частотные
свойства.
Все современные ОГ с широкой рабочей подосой час­
тот имеют жидкостное успокоение. Наибодьшую рабо­
чую по.1Jосу частот имеет ОГ типа МО42: 0-30 ООО Гц
при чувствите.1Jьности S 1 =0,45 мм/(мА•м).
Выбор ОГ ддя регистрации данного процесса с воз­
можно меньшим искажением зарегистрированной на но­
сите.1Jе формы кривой с приемлемыми амплитудными
значениями осуществляется в два этапа. В первую оче­
редь производится выбор ОГ по его частотным свойст­
вам, при этом учитывается возможная погрешность ре­
гистрации высших гармоничесI<их составляющих исс.1Jе­
дуемого проuесса. Обычно пр11 регистрации процессов,
имеющих форму кривой, бJ1изкую к треуrодьной, доста­
точно иметь ОГ с рабочей по.1Jосой частот, соответству­
ющей 3-5-кратной частоте основн()й гармоники реrист­
риrуемого процесса. При реrистраuии процессов, имею­
щих форму кривой, б.rrиз1<ую к прямоуrо,rrьной, рабочая
пo.rroca частот ОГ до.rrжна уже соответствовать 1020-кратной частоте основной rармонш<и.
После выбора ОГ по частотным свойствам произво­
дится окончательный выбор ОГ с учетом его чувстви­
те.1Jьности (постоянной), же.1Jаемых а:-.ш.1Jитуд крv.вой на
носителе и значений регистрируемого сиrна.1Jа. Часто на
втором этапе выбора ОГ приходится применять шунты,
добавочные резисторы, а в некоторых с.1Jучаях и специ­
а.rrьные усилите.1Jи.
174
Оптическое и развертывающее устройства. Для пере­
дачи колебательного движения подвижной части ОГ,
для записи на носителе и д.т1я визуального наблюдения
на экране служит оптическое устройство. Упрощенная
схема такого устройства д.11я одного кана.r1а изображена
на рис. 7.9. Луч света от источника Л, проходя через
систему линз и призм, попадает на миниатюрное зер-
Рис. 7.9. Принципиальная схема оnтическоrо устройства светолучево­
rо осциллографа.
ка.11ьце 4, укрепленное на лодвижной части ОГ ( см. рис.
7.8, 6 и в). Отразившись от зерка.11ьuа (площадь менее
1 мм 2 при толщине не бо.11ее 0,1 мм), луч света через
ряд линз и призм попадает на носите.lJЬ Н. При ко.11е6а­
ю1ях подвижной части ОГ светов0е. пятно совершает на
носите.11е поперечные колебания. Для получения времен­
ной развертки носитель перемещают с определенной ско­
ростью с помощью специа.11ьного .11ентопротяжного меха­
низма.
В некоторых светолучевых осциллографах прежних
выпусков кроме регистрацни исследуемого сигна.11а пре­
дусматрива.11ась также возможность визуалыюго наб.11ю­
л.ения этого сигна.11а на специа.11ьно устанавливаемом
экране Э (рис. 7.9). В таких осци.11.11ографах часть луча
света, отраженного от зерка.11ьца ОГ, попадает на вра­
щающийся с постоянной скоростью зерка.11ьный барабан
Б. Нетрудно видеть, что при вращении барабана изме­
няется угол падения луча на каждую данную грань ба­
рабана. С.11едовательно, создаваемое .11учом световое пят­
но перемещается вдоль экрана, осуществ.11яя таким об­
разом временную развертку исследуемого сигна.11а,
175
Расшифровка осциллограмм. При расшифровке ос­
цил.nограмм (рис. 7.10) обычно опреде.11яют какие-либо
временные интервалы исс.11едуемого процесса и значения
тока в каждый данный интересующий экспериментатора
момент времени. Д.11я установ.11ения масштаба по оси
времени в светолучевых осциллографах применяются от•
метчики времени. Чаще все�
го это специальные электро­
механические устройства, на­
носящие на носитель света-
...
Рис. 7.10. Осциллограмма светолу­
чевого осциллографа.
вым .11учом вертш{а.11ьные .11инии через определенные ин­
терва.11ы времени, например 0,2; 0,02 с и т. д. Подсчитав
количество .rrиний между интересующими точками за­
регистрированной кривой и умножив это число на мас­
штаб отметчика времени, по.rrучим значение определяе­
мого интервала времени.
Для нахождения .rrюбoro мгновенного значения тоr{а
в рамке ОГ достаточно определить в миллиметрах от­
клонение соответствующей точки на изображении этого
тока на носителе и затем разде.'!ить полученное значе­
ние на значение чувствительности к току S r применяе­
мого ОГ, при этом необходимо помнить, что значение
S r до.rrжно соответствовать расстоянию носите.'!я от зер­
ка.'!ьца ОГ в данном светолучевом осци.11лоrрафе.
7.7. ЛАБОРАТОРНАЯ РАБОТА № 6.
ИЗУЧЕНИЕ СВЕТОЛУЧЕВОГО ОСЦИЛЛОГРАФА
И ЕГО ПРИМЕНЕНИЕ
В настоmцее время промышленностью выпускается достаточно
большое чис;ю различных типов светоJiучевых осци.rrлографов с ре­
гистрацией как на обычной фотоленте или фотобумаге, так и на но­
сителе, цувствите.rrьном 1( у11ьтрафиолетовым лучам. Независимо от
этого в большинстве светш1учевых осциллографов исnо.�1ьзуются
ОГ-вставки одних и тех же типов.
Основными параметрами ОГ являются чувствительность S r и
рабочая полоса частот, определяемая частотой собстве1тых коле­
баний подвижной части гальванометра (f0). В соответствии с
ГОСТ 11013-81 на ОГ nромыш.rrенностью выпускаются ОГ с доста­
точно большими отклонениями действительных значений S r н fo от
значений, указанных в паспорте на данный ОГ. Так, минимальное
эиачение S r может существенно от1шчаться от номинального значения.
Отклонение действительного значения Sr от паспортного в сторону
176
увели•�ения даже не регламентируется. Оrклонение действительиоrо
значения собс1венной частоты ОГ fo от частоты, указанной в паспорте,
может доходить до ±20%. Поэтому целесообразно перед примене­
нием выбранных ОГ для регистрации какого-либо процесса уточнить
и значения Sr и fo.
В работе определяются значения Sr н рабочие полосы частот
для двух ОГ - высокочувствительного низко•шстотноrо и 1шзк0чув­
ствительноrо высокочастотного. Кроме того, в данной работе 11ро­
водится расшифровка осциллограммы с записью простейшего сиг•
нала.
Задание
1. Ознакомиться с приборами, предназна 11енными для выполне­
ния данной .'!абораторной работы, уделив особое внимание прави­
лам пользования применяемого светолучевоrо осциллографа. Внести
в протокол паспортные данные приборов, в том числе и используе­
мых в l_}аботе ОГ.
2. Опреде.чить действительное значение чувствительности низко­
чувствительного ОГ.
Для определения чувствите.чьности необходимо собрап, схему,
изображенную на рис. 7.11, включив для измерения тока в ОГ ми.'!-
[
�
s�
Рис. 7.11. Схема ДJIЯ определения
ческих rа.чьванометров.
11
увствительности осциллографи­
лиамперметр (переключатель SAI находится в положешш 1). В СО•
отвстствин с ГОСТ 11013-81 чувствительность определяют при токе,
равном 0,75 значения градуировочного тока (указьшается в паспор­
те на ОГ). При выключешюй развертке опреде.чяют отклонение све­
тового пятна на экране осцил.чографа внача.'!е при одном направле,
нии тока /, затем при другом. Для переключения направления тока
используют nерекJ1ючате.ль SA2.
Значение S 1 подсчитывают по формуле
S1 = (а1 + а2)/2/,
где а 1 и а2 - отклонение светового пятна на экране при изменении
направдсния тока, мм; / - ток в подвижной части гальванометра,
мА.
3. Рассчитать постоянную по току исс.nедуемоrо ОГ:
CI = I/S1 •
4. Рассчитать паспортную чувствитеJ1ьность и паспортную 11012-970
171
сто,�кную по току (д.111Ша луча I м):
81n.icn = 81 l/l',
где l= 1 м, а l' - длина луча до экрана в применяемом светолу•
чевом осциллоrрафе, м;
C/11ncn = 1/S/пасн•
Сравнить полученные значения Srпaco и C,,,a�n со значениями,
приоеденными в паспорте на данный ОГ.
и с; данного ОГ при регистрации процесса
5. Рассчитать
на носителе, если у применяемого светолуцевоrо осциллографа дли•
на луча до экрана l' не совпадает с длиной лу•1а до носителя l":
s;
s; = s1 (11'; с;= 1/s;.
6. Повторить задания 2-5 ддя высокочувствительного ОГ. При
определении S, этого ОГ нслользустся схема рис. 7.11 с переклю­
чателем SAJ, находящимся в положении 2.
7. Определить рабо•�ую IIOJIOCy частот оысокочуоствителыюrо
ОГ. Для этого, используя схему рис. 7.12, снимают амплитудно­
•1астотную характеристику гальванометра. В11ачале при синусои-
Рис. 7.12. Схема для снятия ампли­
тудно-частотной характеристики ос­
циJ1дографи•1ескоrо гальоанометра.
Рис. 7.13. Амплитуд110-частотная характеристика осциллоrр.аф11чес­
кого гальванометра.
дальном напряжении с ча стотой f 1, равной 5 % fo (устанавливается
с помощью генератора синусоидальных колебаний Г), добиваются
откло�rения светового пятна на экране осш1ллоrрафа (развертка
выключена) о пределах 40-50 мм.
Поnдерживая неизме1шы�1 показание ЭJJектронного оольтметра,
увеличивают частоту напряжения и в пяти-шести точках опреде­
ляют 01кло11ение свстово,о пятна на экране при каждой данной
частоте. (Верхнее значение частоты не должно быть бодьще удвоенного
зна 11ения номина.%11ой собствен11ой частоты данного ОГ) По полу­
чс1111ым данным строят а1\\ПJtитудно-частотную характеристику, при­
мерныи nид которой приведен на рис. 7.13, где v - относительное
178
изменение амп.nитуды отклонения светового пятна на экране:
"= а,п/йот,
где ат - отклонение светового пятна на экране ври данной часто­
те; йот - отклонение светового пятна на экране лри начальной
частоте (для данного ОГ при f 1 ).
На полученном граф1ше проводят линии при 'V = 1 и v = 1 ±Л,
где Л- значение допустимой нелинейности амплитудно-•1астотной
характеристики данного ОГ. Для ОГ с обмоточным успокоением
рекомендуются зна•1ения Л=±5%. Для ОГ с жидкостным и каркас­
ным успокоением -Л=±IОо/о.
Первое пересечение амп.nитудно-•1астопюй характеристики с ли­
ниями v=l+Л или v=I-Л определяет верхнюю часТ<JТу рабоче11
полосы частот. На графике, приведенном на рис. 7.13, рабо•rая по­
лоса частот составляет 0-150 Гц при Л=±5%.
8. Определить рабочую полосу частот низкочувствительноrо ОГ,
исполь.зуя методику, изложенную в п. 7.
9. Произвести регистрацию на носителе с nомошыо указанного
преподавателем ОГ синусоидального сигнала неизвестной частоты.
10. По осциллограмме определить амплитудное значение тока
в ОГ и частоту зареrистрироваиноrо процесса.
При определении амплитудного значеню1 тока использовать s;
или с;, получе1-шые при выполнении n. 5.
При опреде.�ении периода, а затем и частоты зарегистрирован­
ного процесса использовать показания отметчика времени применяе­
мого светолучевого осциллографа.
11. Составить отчет по требуемой форме.
ГЛАВА ВОСЬМАЯ:
ЭЛЕКТРОННЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
8 1. КЛАССИФИКАЦИЯ. ОБЩИЕ СВЕДЕНИЯ
В этой главе рассматриваются ана.�:1оrовые э.11ектрон­
ные измерите.11ьные приборы (АЭИП), основными функ­
циональными уз.11ами которых яв.11яются раз.11ичные элек­
тронные измерительные преобразователи и другие спе­
циа.11ьные электронные устройства. В большинстве элек­
тронных приборов в качестве выходных устройств
испо.11ьзуются магнитоэ.11ектрические механизмы, а в не­
которых типах приборов - э.11ектронно-лучевые трубки
(например, в осци.11.11оrрафах, анализаторах спектра и
др.).
Аналоговыми такие приборы называются потому, что
их показания являются непрерывными фу111щиями из12*
179
меряемых ве.�шчин, которые в свою очередь могут при­
нимать любые значения в измеряемом диапазоне.
Аналоговые э.1ектронные измерительные приборы ши­
роко применяются в научных исс.�rедованиях и промыш­
ленном производстве.
Аналоговые э.rrектронные измерите,'lьные приборы
можно разде.11ить на четыре основные группы. В пер­
вую - самую большую - можно вкточить приборы для
измерения параметров и характеристик сиrна.11ов (на­
пр11мер, вольтметры, осuиллоrрафы, частотомеры, ана­
лизаторы спектра и др.).
Вторая группа - приборы д.'lя измерения параметро в
и характеристик э.11ементов э.11ектрических и э.11ектронных
схем и для измерения характеристик активных и пассив­
ных двухпО,'lЮСНИКОВ и четырехпО,'lЮСНИКОВ. Сюда вхо­
дят измеритеJш сопротив.'lения, емкости, индуктивности,
параметров электронных .rrамп, транзисторов, а также
приборы д.rrя снятия частотных и переходных характе­
ристик и др.
Третью группу образуют измерите.rrьные генераторы,
являющиеся источнююм сигна.11ов раз.rrичного уровня,
формы и частоты.
Э.rrементы измерительных схем, та1ше, как аттенюа­
торы (ос.rrабите.'lи cпrнaJia), фазовращатели и другие,
образуют четвертую группу.
В АЭИП широко испо.'lЬзуются шкально-верньерные
устройства, позво.rrяющие устанавливать требуемые зна­
чения регулируемых параметров физичесrшх ве,'lичин
(например, напряжение, частоту сигнала, сопротив.rrение,
емкость и т. п.).
В соответствии с ГОСТ 15094-69 все э.rrектронные
приборы в зависимости от характера изиерений и вида
измеряемых ве.'lичин разде.'lяются на 20 подгрупп, кото­
рые обозначаются прописными буквами русского а.'lфа­
вита. Каждая подгруппа состоит из нескольких видов,
обозначаемых арабскими цифрами по порядку. Прибо­
ры, образующие один вид, подразде.'lяются на типы, име­
ющие порядковые номера. Номер типа отде.11яется от
номера вида дефисом (черточкой). Ниже приведены при­
меры классификации.
Подгруппа В. Приборы д.rrя измерения напряжения:
В2 - вольтметры постоянного тока;
ВЗ - во.'lьтметры переменного тока;
В4- во.rrьтметры импульсного то1ш;
J80
В7 - вольтметры универсальные.
Подгруппа Г. Генераторы измеритеJ1ьные:
ГЗ- генераторы гармонических колебаний низкочас­
тотные;
Г4-генераторы гармоничес1mх коJ1ебаний высокоча­
стотные;
Г5- генераторы импульсов.
Подгруппа Е. Приборы для измерения параметров
компонентов цепей с сосредоточенными постоянными:
ЕЗ -- измерители индуrпивности;
Е6- измерители сопротивJJений;
Е7 - измерители емкостей.
Подгруппа С. Приборы дJ1я наблюдения, измерения
и исследования формы сигнала и спектра:
С 1 -универсальные осциллографы.
Подгруппа Ф. Приборы для измерения фазового
сдвига.
Ф2 - измерители фазового сдвига.
Подгруппа Ч. Приборы для измерения частоты:
ЧЗ-частотомеры электронно-счетные.
В обозначении комбинированного прибора, предна­
значенного для измерения нескольких физических вели­
чин, к основному обозначению подгруппы добавляется
буква .К. Модернизированные приборы сохраняют свое
прежнее обозначение, но после номера типа добавляет­
ся прописная буква русского алфавита: А-первая мо­
дернизация, Б -вторая и т. д.
Примеры обозначений: В2-25 - вольтметр постоянного напряжения, тип (модель) 25;
ВК2-17 -вольтомметр;
В3-38 - вольтметр переменного напряжения;
В7-21-вольтметр универсальный, предназначенный
для измерения постоянных и переменных напряжений.
Технические характеристики АЭИП регламентируют•
ся общим ГОСТ 22261-76.
8.2. ЭЛЕКТРОННЫЕ ВОЛЫМЕТРЫ
Электронные вольтметры составляют наиболее об­
ширную группу среди электронных приборов. Основное
их назначение-измерение напряжений (постоянного,
переменного, импульсного). В состав вольтметров вхо­
дят усилители постоянного и переменного напряжения,
измерительные преобразователи переменного наnря.же181
ния в постоянное и постоянного в переменное, делители
напряжения. В качестве выходных приборов в основно.\f
используются магнитоэлектрические микроамперметры.
Рассмотрим кратко структурные схемы, особенности
схемных реализаций и технические характеристики ос­
новных фун1щионаJ1ьных узлов электронных вольтмет­
ров.
Усилители. Усилите.ли, применяемые в вольтметрах,
оказывают существенное влияние на метрологические ха­
рактеристшш вольтметра (чувствительность, диапазон
частот измеряе:1tых напряжений и, в значительной мере,
-- ------лк- ' -К- -i!JK
Кном
lf)
fв
Рве, 8.1. АмпJJ11тудно•частО'l'ные характеристики усилителей.
а - постояшtоrо напряжения; 6 - переменного напряжения.
общую погрешность вольтметра), 1<оторые в первую оче­
редь определяются типом используемого в вольтметре
усилителя и его техническими характеристиками.
В воJ1ьтметрах испоJJьзуют электронные усилители по­
стоянного и переменного напряжения, 1шторые отлича­
ются друг от друга зависимостью 1шэффиц11ента усиле­
ния усилителя от частоты, т. е. K=(fJ(f) *, назьшаемой
характеристикой
усилителя
амплитудно-частотной
(ЛЧХ).
На рис. 8.1 приведены АЧХ для усилителей постоян- '-­
ного (рис. 8.1,а) и переменного (рис. 8.1,6) напряже-­
ния. В усилитеJ1ях переменного напряжения значение I<
с уменьшением частоты падает. Это объясняетс11 нали­
чием емкостной связи между каскадами: с уменьшением
частоты сопротивление конденсатора связи растет и по,
э1·ому коэффициент передачи этой цепи уменьшается, а
на постоянном токе он равен нулю. Частотные возмож­
ности усилите11я хара!(теризуются полосой пропускания,
• В электронных усилителях выходное 11апряжен11е ус11л11те,1я
Uюъ,х связано с входным напряжением Unx выражением Uau,ix =
= l<Vп,
182
задаваемой нижним fн и верхним fn значениями диапа­
зона частот, в котором отклонение К от поминального
значения Квом не превышает заданного значения (ЛК
или б =ЛК/ Клом). Полоса пропускания усилителя по­
стоянf!оrо напряжения характеризуется одним fв значе­
нием 11астоты.
Другой важной хара1перистикой усилителя яв.т1яется
ero амплитудная характеристика (рис. 8.2), 1шторая в
реальном усилителе при достаточно больших входных
Рве. 8.2. Амплнтудная характе•
р11ст11ка усилителя.
Рис. 8.3. Осциллограммы вы­
ходного напряжения усилите­
лей.
а - ПOCТOЯIIIIOl'O 11аnрnжеииц; 6 переменного наnряже1111я.
сигналах отличается от линейной зависимости из-за не­
линейности характеристик ламп или транзисторов и ог­
раничения напряжения питания усилителя.
Для усилителей постоянного тока характерна неста­
бильность, проявляющаяся в медленном изменении ну­
левого уровня выходного напряжения усилителя, т. е.
выходного напряжения усилителя при ero закороченном
входе. Такое иэменение часто называют дрейфом нуля
усилителя. Дрейф нуля усилителя отличают от шума
усилителя, под которым понимают более быстрое, че�1
при дрейфе, изменение выходного напряжения усилите­
ля. На р ис. 8.3, а дрейф идJ) - медленная составляющая
напряжения выходного усилителя постоянного напряже­
ния -условно выделен и обозначен штриховой линией;
шум ll ш - быстрая составляющая выходного напряже­
ния (рис. 8.3, а и 6) - присущ обоим типам усилителей.
Дрейф нуля усилителя обусловлен разными причина­
ми - медленным изменением питающих напряжений, из­
менением внешней температуры, временным изменением
(«старением») параметров элементов уси.1_штеля и дру­
гими причинами.
183
Дрейф пуля усилителя принято характеризовать при­
веденным ко входу усилителя напряжением, т. е. напря­
жением, которое необходимо подать на вход усилителя,
чтобы вызвать смещение нуля усилителя, равное его
дрейфу. Таким образом, приведенное 1ю входу напряже­
ние является количественной оценкой дрейфа нуля, не
зависимой от коэффициента усиления усилителя, и поз­
воляет проводить сравнительную оценку по этому пара­
метру различных усилителей
В вольтметрах постоянного напряжения, выпускае­
мых промышленностью, нашли применение следующие
типы усилителей постоянного напряжения:
l) усилители с непосредственными связями;
2) усилители типа модуляция- усиление - демоду­
ляция (МДМ);
3) усилители на основе магнитоэлектрических галь­
ванометров с фотопреобразователями.
Охарактеризуем названные типы усилителей.
Элементной базой построения усилителей первых
двух типов служат электронные лампы, транзисторы, а
в последнее время - усилители в микросхемном исполне­
нии. Ламповые усилители с непосредственными связями
имеют приведенный дрейф нуля, достигающий 30100 мВ/ч, причем для ламповых усилителей основными
причинами дрейфа являются изменение анодных напря­
жений, изменение тока накала ламп и временное измене­
ние характеристик ламп. Для транзисторных усилителей
основная при•rина дрейфа - изменение температуры.
В лучших типах усилителей температурный дрейф не
превышает 10-100 мкВ/0С.
В усилителях типа МДМ (рис. 8.4, а) постоянное
входное напряжение преобразуется модулятором М в
переменное напряжение. Модулятор состоит из двух
ключей (рис. 8.4, 6), коммутация которых производится
в противофазе, т. е. замыкание ключа SAJ сопровожда­
ется размыканием ключа SA2, и наоборот. Управление
ключами осуществляется от специального генератора Г.
Если сопротивление ключей -в замкнутом состоянии рав­
но нулю, а в разоr,шнутом - бесконечности, и если пере­
ключение произв(,)дится мгновенно, то выходное напря­
жение модулятора представляет последовательность
прямоугольных импульсов (рис. В.4, д) с амплитудой, рав­
ной входному напряжению Ивх (рис. 8.4, г).
Импульсы усиливаются усилителем переменного
184
напряжения JIH. Выходной сигнал JIH не содержит по­
стоянной составляющей (рис. 8.4, е), посколь!{У усилите­
J1И переменного напряжения не усиливают постоянного
напряжения (или постоянной составляющей переменного
напряжения). Схема и принцип действия демодулятора
ДМ (рис. 8.4, в) аналогичны схеме и принципу действия
модулятора. На выходе ДМ при синхронной 1юммута­
ции ключей модулятора и демодулятора (одновременно
замкнуты ключи SAJ и SАЗ, а к.чючи SA2 и SA4 разомк-
Рис. 8.4. Усилитель типа МДМ.
нуты, и f!аоборот) полярность прямоугольных импульсов
совпадает с полярностью импульсов на выходе модуля­
тора (рис. 8.4, ж). Фильтром Ф (рис. 8.4, в) импульсы
усредняются, и на выходе усилителя типа МДМ получа­
ется, таким образом, усиленное постоянное напряжение,
полярность которого определяется поJ1ярностыо И вх
(рис. 8.4,з).
В модуляторах и демодуляторах могут быть исполь­
зованы электромеханичес1ше прерыватели (так называ­
емые вибропреобразователи) и полупроводниковые клю­
чи, чаще всего - на полевых транзисторах. Дрейф ну­
ля усилителей типа МДМ определяется дрейфом моду­
лятора н не превышает 0,01-10 мкВ/ 0С и 0,0110 мкВ/ч.
В усилителях на основе магнитоэлектрических галь­
ванометров с ф[)топреобразователями (фотогальвано­
метрические усилители - ФГУ) луч света, отраженный
зеркальцем, жестко скрепленным с рамкой гальвано­
метра, падает на дифференциальный фоторезистор
(ДФР) и при отсутствии тока в рамке освещает рав­
ные площади ДФР; поэтому сопротивления фоторезис155
торов одинаковы. В этом случае выходное напряжение
мостовой цепи, в которую Вl{Лючен ДФР, равно нулю.
При повороте рамки смещение светового пятна приво­
дит к увеличению сопротивления одного фоторезистора
и уменьшению второго. Это вызывает пояrзлепие напря­
жения на выходе мостовой цепи.
ФотогаJ1ьванометрический усилитель имеет невысокий
уровень дрейфа, обусловленный в основном возникнове­
нием термо-ЭДС во rзходной цепи усилителя. Действи1·елы-ю, если в объеме, занимаемом входной цепью ФГУ,
существует перепад температуры, то входная цепь, со­
ставленная из разнородных металлов или сплавов (ме­
ди, олова, манганина, фосфористой бронзы), эквивалент­
на нескольким последовательно вклюtrенным термопа­
рам. Об.щее значение термо-ЭДС в ФГУ достигает
0,01-1 мкВ.
Усилители, входящие в электронные вольтметры,
должны иметь стабильный коэффициент усиления; его
нестабильность, вызванную влиянием различных факто­
ров (температурой, нелинейностью амплитудной харак­
теристики усилителя, частотой, «старением» элементов
и т. п.), необходимо свести к минимуму. Наиболее эф­
фективный способ стабилизации коэффициента усиле­
ния - введение отрицательной обратной связи (ООС).
Во входную цепь усилителя вводится напряжение обрат­
ной связи Иа,с, пропорциональное выходному сигналу
усилителя. В этом случае непосредственно на входе уси­
лителя действует разность входного напряжения и напря­
жения обратной связи:
(8.1)
Uy =Ивх-Ио,с·
При таком последовательном сложении сигналов во
входной цепи усилителя ООС называется последова­
тельной. Если Ио,с пропорционально выходному напря­
жению усилителя (напряжению на нагрузке), то усили­
тель охвачен ООС по напряжению. Если Ио.с пропор­
ционально выходному току усилителя (току в нагруз­
ке), то усилитель охвачен ООС по току. На рис. 8.5
представлены схемы усилитедей, охваченных ООС по
напряжению (рис. 8.5, а) и по току (рис. 8.5, 6).
Для схемы рис. 8.5, а, предполагая, что входное со­
противление усилителя бесконе•шо, а выходное равно
нулю, с учетом (8.1) имеем:
Ивых = КИу = (Ивх-Ио ,с)К.
(8.2)
186
В свою очередь
и
о,с
=V
__&_=и
вых Ri+R2
А
(ВЗ)
вых t',
где P=R 1 /(R 1 +R 2 )- коэффициент передачи цепи ООС.
Поэтому с учетом (8.2) и (8.3)
(8.4)
U вых = К (U вх - V вых В) .
.-----,�=11/dr
о----,,-;
Uox
-+
Uo1c
"/jy
[>
➔
_____ _
._______ ...J
оос
о)
Рис. 8 5 Обратные сnязи в усилителях.
Из (8.4) следует, что коэффициент усиления усилите•
J1я, охваченного ООС по напряжению, равен:
Ко.с= Ивы-JUБх = Kl(l + КВ)Считают, что усилитель охвачен глубокой ООС, если
КВ� 1. В ЭТОМ СJ1учае
Ко.с � 1/В = (R1 + RJIR1 = 1 R,/R1
и, таким образом, Ко ,с определяется отношением резисто­
ров цепи ООС и в первом прибJшжении не зависит от
коэффициента усиления усилителя К.
ДействитеJJьно, нестабильность К приводит к неста­
бильности Ко.с, Можно показать, •1то относительная ве­
сгабильность /(0 ,с ( бко,с) меньше относительной неста •
бильности К(бк) в K�+l раз, т. е.
6к о.с = l\/(1 + I(B),
+
где бко,с=ЛК.о,с/Ко,с; бк =ЛК/К..
С введением ООС по напряжению уменьшается БЫ•
ходное сопротивление усилителя (в реальных условиях
оно не равно нулю) примерно в К(3+ 1 раз, что позволяет
уменьшить изменение выходного напряжения при изме­
нении сопротивJ1ения нагрузки Rнаг- Действите11ьно, пrи
увеличении тока в нагруз1<е (из-за увеличения падения
налряжения на выходном сопротивлении усилителя)
1в�
Uвых уменьшается, что приводит также к уменьшению
Uo ,c, а следовательно, к увеличению Uy и поэтому к уве
личению Uвых- Это увеличение Uвьгs. компенсирует умень•
шение выходного напряжения усилителя.
В усилителе с ООС по току (рис. 8.5, б).
/
_ К Uвх-Ио,с .
(8.5)
,
nыхR11аг+ Ro,c
(8.6)
Uо.о = Ro.c f вых•
1
Из (8.6) и (8.6) следует, что
К
К = lnыx =
1
Ивх
Rнаг + R o ,c (К-/-1)
(8.7)
Величина 1(1 называется коэффициентом усиления
усилителя по току. Коэффициент усиJ1ения имеет размер•
ностъ проводимости.
При глубокой ООС, т. е. при Ro,c(K+I)»Rнaг, фор­
мула (8.7) упрощается и К1 определяется выражением
(8.8)
К 1 � l!R 0,0•
Можно показать, что
6К1 = бкf(1
+ К�).
rде бю =ЛК1/К1, �=Ro.c/(Ro.c+Rнar).
Подобно тому как это было сделано для усилителя с
ООС по напряжению, можно поI<азать, что с введением
ООС по току увеличивается выходное сопротивление
усиJшТеJrя и уменьшается изменение выходного тока в
нагрузке при изменении сопротивления наrруз1ш.
Очень важно, что входное сопротивление усилителя
(для реальных усилителей оно конечно), охваченного
последовательной ООС, увеличивается в (K�+I) раз
при ООС по напряжению и по то1<у, так что
Rвх,о,с = R ох (1 + �К),
rде Rвх - входное сопротивление усилителя; Rвх,о,с входное сопротивление усилителя, охваченного ООС.
Наконец, введение ООС позволяет расширить полосу
пропускания усилителя.
Вместе с тем следует отметить, что улучшение харак­
теристик усилителей при введении ООС сопровождается
уменьшением коэффициента усиления. Действительно,
188
поскольду необходимо, чтобы КВ» l, то К» Ко, с, так как
Ko,c = l/�.
Преобразователи амплитудного, средневылрямленно­
rо и действующего ( среднеквадратического) 1 значений
переменного напряжения. Эти преобразователи исполь­
зуются в вольтметрах переменного напряжения. Выход,
ное постоянное напряжение (ток) этих преобразовате­
лей пропорционально одному из указанных значений пе­
ременного напряжения.
Преобразователu а.�плитудного значения (ПАЗ)
строятся в бо11ьшинстве случаев по схемам, чриведен:,с б
YDf
--1J>>1--I c--f R....-.�
и;ь«
а)
,1
.
щ
.t
�
з}
Рис. 8.6. Преобраэовате.r�и ампт1тудного значення.
11ым н2 рис. 8.6, а и 6. Рассмотрим работу ПАЗ с откры­
тым входом (рис. 8.6, а) при подаче на вход синусои­
дального напряжения. Пусть в некоторый начальный мо­
мент t0 входное напряжение на•шнает нарастать (рис.
8.6, в), заряжая конденсатор через открытый диод VDJ.
При достаточно малой постоянной времени заряда
тз [,;з = (Rи +Rп)С; R11 - внутреннее сопротив11енис ис ­
точника сигнала; Rv - сопротивление открытого диода]
по сравнению с периодом измеряемого напряжения на­
пряжение на конденсаторе С практически повторяет
входное напряжение и поэтому через четверть периода
достигает значения Итах (рис. 8.6, г). С этого -момента
входное напряжение уменьшается и диод закрывается.
' Термин «срсднеквадрат11ческое значение» употребляется, ког•
да сигнал яnляется непер11од11чсск11м.
189
Конденсатор будет разряжаться через резистор R до мо­
мента ti, когда входное напряжение становится равным
напряжению на 1юнденсаторе, после чего диод открыва­
ется и конденсатор подзаряжается до U,nax и т. д. Сред­
нее значение напряжения на конденсаторе И со близко к
Итах, Отношение
К ПАЗ = U с/Итах
является коэффициентом преобразования ПАЗ. Схема
ПАЗ, приведенная на рис. 8.6, а, имеет так называемый
открытый вход, поскольку при наличии постоянной со­
ставJ1яющей во входном сигнале +Ио выходное напря­
жение ПАЗ будет равно Итах +И0 • Приведенная схема
предназначена для измерения амплитуды входного сиг­
нала положительной полярности. Для измерения ампли­
туды сигнала отрицательной полярности необходимо из­
менить по.пярность включения диода.
Устройство, приведенное на рис. 8.6, б, называется
ПАЗ с закрытым входом. В этом ПАЗ процесс заряда
конденсатора аналогичен рассмотренному выше (ПАЗ с
открытым входом). Напряжение на конденсаторе уста­
навливается и остается близким к значению U,,,ax
(рис. 8.6, е). Поэтому напряжение на диоде VD2 равно
алгебраической сумме входного напряжения (рис. 8.6, д)
и напрнжения на конденсаторе и имеет вид, представлен­
ный диаграммой на рис. 8.6, ж. С помощью фиJ1ьтра
RФСФ напряжение усредняется, и на выходе ПАЗ напря­
жение почти постоянно и близко к Итах (рис. 8.6, з).
Амплитудная характеристика И с0 =f (Итах ) нелиней­
на при Итах до 0,3-0,5 В из-за нелинейности вольт-ам­
перной характеристюш диода и близка к линейной Jави­
симости при больших напряжениях.
Амплитудно-частотная характеристика ПАЗ К пАЗ =
= q> (f) равномерна в полосе частот от 20 Гц до 1 ООО МГц.
Верхнее значение частоты fв полосы пропускания опреде­
ляется частотными свойствами диода, значениями меж­
дуэлектродных и монтажных емкостей и индуктивностей
подводящих проводов. Для сведения к минимуму в,111я1-1ия последних факторов ПАЗ конструктивно оформляет­
ся в виде пробника и выносится за пределы прибор:�.
Нижняя граница fн полосы пропус1<ания определяется
постоянной времени разряда конденсатора t'p (,;р = CR),
и че�-1 60J1ьше ее значение, тем меньше fиВходное сопротивление ПАЗ не остается неизменным
190
в течение периода синусоидального напряжения, дейст­
вующего на ero входе. Пока диод закрыт, входной ток
очень мал. В установившемся режиме ПАЗ потребляет
ток от источника сигнала в течение очень корот1{ОГО про­
межутка времени, когда происходит подзаряд кондеи<'а­
тора. Д.1Jя характеристю<и входного сопротивления ПАЗ
используются усредненные оценки. Входное э1<вивалент­
ное сопротивление ПАЗ (Rвх,эн)- это такое .'Iинейное со­
противление, которое потребляет от источнш<а сигнала
ту же активную мощность, что и схема ПАЗ. В этом слу­
чае при синусоидальном входном сигнале оно определя­
ется следующим образом:
дЛя схемы рис. 8.6, а
(8 9)
R nх.эн = R/2,
для схемы рис. 8.6, 6
R
Rnx, Jн =
з+ (R/Rф)
В реальных ПАЗ сопротивление резистора R= 10 :�
50 МОм И поэтому Rвх, эк=5+25 МОм.
Рис. 8 7. Преобршювание прямоуrолъных импу.�ьсов.
Рассмотренные ПАЗ используются таюке для измере­
ния амп.rштуды импульсов. Если на входе ПАЗ (рис.
8.6, а) действует последовательность прямоугольных им­
пульсов (рис. 8.7), то выходное напряжение преобразова­
теля (напряжение на конденсаторе) близко 1< Ита"•
Коэффициент преобразования ПАЗ (.Кллз = V со/ Ита:,.,)
в общем случае зависит от скважности импульсов Q=
= Tftи и соотношения между постоянными времени за­
ряда и разряда ,шнденсатора. Рассмотренные ПАЗ поз­
воляют измерять амплитуду импульсов с минимальной
длителы-юстью до десятых долей микросекунды и скваж­
ностью от 2 до 10 3 • Входное э1{вивалентное сопротивление
ПАЗ ( см. рис. 8.6, а) при импульсном воздействии
191
(рис. 8.7), определяемое аналогично (8.9), равно:
Rвх,зк
= R/Q.
Преобразователи средн.евыпрямлен.н.ого значения
(ПСЗ), используемые в э.11е1<тронных вольтметрах, в
большинстве случаев строятся на основе усилителей пе­
ременного то"а, охваченных ООС no току, причем в ка­
честве нагруз1<и используется двухполупериод�ая (мосто­
вая) или однополупериодиая выпрямительная цепь с
магнитоэле1<тричес1<им измерительным механизмом микроамперметром в "ачестве выходного прибора (рнс.
8.8). В соответствии с (8.8)
iвых = UвxlRo,c·
Если на входе действует переменное nериодичес1<ое
напряжение, то среднее значение тою:1, нроте1<ающего че­
рез микроамперметр, равно:
т
1
/ 0\J = I Ивх (t) / dt.
-J
TRoc
• о
При синусоидальном входном сигнале Ивх = Иma,:sin (J)[
/ р= 2Um
е
axfлRo ,c·
Нелинейность вольт-амперной характеристюш дио­
дов при достаточно большом !{Оэффициенте усиления
усилителя практически не сказывается на линейности
амплитудной хара"теристики
ПСЗ. При этих же условиях
влиянием изменения сопрот11во-!
11вх [::>
лепий диодов в прямом направIcp лении и микроамперметра от
температуры на характеристн­
l(у преобразования можно пре­
небречь.
Преобразователь среднего
значения (рис.8.8) может ра­
ботать в диапазоне частот от
Рис. 8.8. Преобразоnате.%
20 Гц до 10 МГц при неравносреднего значения.
мерности АЧХ в пределах от
1,5 до 10%. Частотные возможности таl(ОГО ПСЗ опреде­
ляются в основном АЧХ усилителя.
1 ._____.
192
-
Преобразователи действующего значения (ПДЗ), ис•
пользуемые в большинстве э.пектронных вольтметров,
выпущенных в последние годы, включают в себя компа­
раторную схему с термоэлектричес1шми преобразовате­
лями (рис. 8.9). Измеряемое напряжение через усилитель
Yl, охваченный ООС по току и предназначенный для
усиления сигнала и увеличения входного сопротивления
,-----,,Yz
о-! Yf
UВх
�---1
[):,
Рис. 8.9. Преобразовате.!\Ь действующего зна•1ения.
вольтметра, подается на нагреватель первого термоэлек◄
трического преобразователя ТП 1.
Мощность, подводимая к нагревателю ТПJ, равна�
Р1 = И;х R.ff1/R�.c,
где Иnх - действующее значение входного напряжению
и..
-{+
J и?.(�dt;
Rп1 - сопротивление нагревателя ТП 1.
Электродвижущая сила Етш , развиваемая термо:111рой Т П 1, в первом приближении пропорциональна под­
водимой к нагревателю мощности, т. е.
(8.10)
Етш =К 1 Р 1 =к,и: х Rн/R�.с•
После подачи измеряемого напряжения V nx ЭДС Етп1
начинает нарастать и на выходе усилителя постоянного
напряжения У2 появляется напряжение, создающее ток
в нагревателе второго термопреобразователя ТП2. Элек­
тродвижущая сила, развиваемая термопарой ТП2, равна:
(В.] 1)
Е ТП2 = К2 р2 = К2 1�ы " R,12·
гq:е /nых - постоянный ток , про те1,аю щий по нагревателю
ТП2; R112 - сОrтfотивление нагревателя ТП2,
13-970
193
Нарастание lвых продолжается до не1ютороrо устано•
вившегося значения. Установившееся значение lвых оп•
ределяется следующим образом. Выходное напряжение
У2, усиливающее разность ЭДС термопар, благодаря вве­
дению в неrо нелинейной ООС равно:
Ивых = АVЕтш-ЕтП2 = fcыx(Rp + R112), (8.12)
rде Rp - сопротивление обмот1ш рамки микроампермет­
ра, включенного в выходную цепь У2; А -коэффициент
пропорциональности.
Подставляя (8.10) и (8.11) в (8.12), получаем:
А{Ki--Ro,c-R,1
2
и;х
-K/;ыx R,12 - fcыx(R112 + Rp)- (8. 13)
_
Решая (8.13) относительно f сых, получаем:
/-х =
А�Ивк
Ro.c
VК Rн2 А + (R + R112)
2
2
11
2
.
Параметры схемы выбирают так, чтобы K2R�2�;
� (Rp +Rн2)2, и поэтому
К1f<.н1 Ивх •
/ -V
DЫХ -
Kz/(112
Ro,c
Та1шм образом, постоянный ток lnыx пропорционален
действующему значению входного напряжения.
Рассмотренный ПДЗ может работать в диапазоне
частот от 20 Гц до I О МГц при неравно:.1ерности АЧХ от
1,5 до 10%. Частотные возможности ограничиваются
свойства:-.1и усилителя ,У 1.
Вольтметры постоянного напряжения. Ка1< уже отме­
чалось, в качестве выходного измерительного механизма
в большинстве электронных вольтметров используются
магнитоэле1,трис1ес1ше микроамперметры. Ток полного
отклонения таliИХ приборов равен 50-500 мкА, сопро­
тив.rrение обмотки рамки находится в пределах 5001000 О:.1. Падение напряжения на обмотке рамки состав•
ляет 25 мВ-1 В, а следовательно, на пределах измере•
ния от 30 мВ до 1 В коэффициент усиления уси.rrителя по
напряжению может не превышать 1-30.
В вольтметрах с использованием лю.шовых усилите•
лей с непосредственными связями нижний предел изме­
рения обычно составляет 100-300 мВ, поскольку на
194
меньших пределах измеряемое напряжение становится
сравнимым с дрейфом нуля усилителя. Поэтому в боль­
шинстве случаев в таких вольтметрах схема лампового
усилителя состоит из двух катодных повторителей,
в1<люченных для уменьшения дрейфа по параллельно­
балансной схеме (рис. 8.10). Измеряемое напряжение
через низкочастотный фильтр (RФ, СФ), позволяющий
ослабить переменную составляющую помехи, 1<оторая мо-
l
Рис 8 10 Вольтметр постоянного напряжения.
жет быть наложена на измеряемый сигнал, поступает
на сетl{у первого I<атодного повторителя на лампе VLJ.
При изменении входного сигнала напряжение между
электродами сетl{а - l{атод лампы меняется незначи­
тельно, а изменение потенциала катода приблизительно
равно изменению потенциала сетки и поэто\1у l{Оэффици­
ент передачи близо1< I< единице_ Потенциал сет1ш лампы
VL2 близок к нулю и может меняться в некоторых пре­
делах с помощью резистора Rper, вынесенного на перед­
нюю панель нрибора и позволяющего устанавливать
стрелку прибора на нуль.
Амплитудная хара1перистю<а повторителя линейна в
диапазоне входного сигнала 0-100 В (при Е 1 =Е2=
= 150 В). Выбор предела измерения (0,1; 0,3; 1; ... ;
100 В) осуществляется с по:vющыо переl{лючателя, поз­
воляющего изменять значение сопротивления добавоч­
ного резистора, включаемого последовательно с раl\ШQЙ
магнитоэле1<трического механизма. Переменные резисто­
ры необходимы для 1<алибровки ш1<алы на соответству­
ющих пределах измерения вольтметра.
С помощью делителя, включаемого на входе повтори­
теля перед схемой фильтра (на рис. 8.10 не пJ1шзан1,
13*
возможно увеличение пределов измерения до 500, 1 ООО В.
Приведенная погрешность та�шх вольтметров составляет
1,5-2,5%.
Вольтметры, имеющие рассмотренную схему, являют­
ся частью схемы универсальных вольтметров (В7), пред­
назначенных для измерения также и переменных напря­
жений (см. ниже).
Стру,аурная схема вольтметра с использованием уси•
лителя типа МДМ приведена на рис. 8.11. Усилитель ох•
ф
м
у
дм
ф
Рис. 8.11. Вольтметр постоянного напряжения на основе усилителя
тиnаМДМ.
вачен ООС по току. Пере1<лючение пределов измерения
осуществляется за счет изменения сопротивления резис­
тора Ro,c с помощью переt<лючателя SA. Нижний предел
измерения таких вольтметров равен 3-30 мкВ, а верх◄
ний-1 В. Приведенная погрешность вольтметров нахо­
дится в пределах 1-6%. Дрейф нуля составлиет 110 мкВ за 8 ч работы. Входное сопротивление 105 106 Ом. У1<азанные хара1<теристики имеют, напр1:мер,
вольтметры В2-11, В2-15, В2-25.
На рис. 8.12 приведена структурная схема иановольт­
метра на основе ФГУ, охваченного ООС по то"У· Для
Рис. 8.12. Вольтметр ттостоянноrо напряжения на основе ФГУ.
196
увеличения коэффициента усиления дополнительно вклю­
чен электронный усилитель. Вольтметры этого типа име­
ют наибольшую чувствительность. Так, нановольтметр
типа Р341 (классификация таких вольтметров не соот­
ветствует ГОСТ 15094-69) имеет нижний предел изме­
рения 500 нВ (500· 10-9 В), у= 1-:-2,5%, R 13x = l-:-50 кОм.
Вольт11tетры пере11tен.н.ого напряжен.ил а11тлитудн.ого
зн.а1tен.ия имеют в большинстве случаев структурную схе­
му, приведенную на рис. 8.13 (положение переключателя
Рис. 8.13. Структурная схе­
ма универсального вольт­
метра.
ПАЗ
t
���
L:::..d 'С,/
llо_____,F
,S'A
SA ~), в которую входят ПАЗ ( см. рис. 8.6, а или б},
усилитель nостояшюго напряжения (см. рис. 8.10) и
маrнитоэле1аричес1шй МИI{роамперметр. Таким образом,
эта схема позволяет создавать универсальные вольтмет­
ры (В7) для измерения амплитуды переменного и посто­
янного напряжений (положение переключателя SA-).
Преобразователь амплитудного значения выполнен в
виде выносного пробника, дающего возможность произ­
водить измерения непосредственно у источника сигнала.
Универсальные вольтметры (например, типов В7-13,
В7-15) предназначены для измерения переменных на­
пряжений в диапазоне частот 10 Гц-1000 МГц, нижний
предеJr - доли милливольта, верхний -1ООО В, приве­
денная погрешность 4-10%, входное сопротнвление
100 кОм-5 МОм.
В ольт11tетры пере11�енн.ого напряжения среднего идей�
ствующего значения имеют структурную схему, приве­
денную на рис. 8.14. Входной каскад (катодный повто­
ритель) усилителя YJ выполняется в виде выносного
дн
У1
YZ
псз
или
пдз
Рис. 8.14. Структурная схема вольтметра переменного напряжения
среднего или действующего значения.
197
пробника, связанного с остальной частью У 1 кабелем.
Выбор nредела измерения ос.уществляется с nомощью де­
лителя напряжения ДН, Вl(люченноrо между двумя уси�
лителями nеременноrо напряжения У 1 и У2. Вl(лючение
ДН на выходе YJ, выходное сопротивление которого ма­
ло, позволяет использовать сравнительно низкоомные
резисторы в схеме ДН. Это облегчает достижение неза­
висимости l(Оэффициента де.пения ДН в широком диапа­
зоне частот.
В качестве преобразователя переменного напряжения
в постоянный ТО!{, протеl(ающий по рамl(е маrнитоэлек­
тричес!{оrо микроамперметра, используются ПСЗ или
ПДЗ, причем У2 стру!{турной схемы, приведенной на
рис. 8.14, может использоваться для построения на ero
основе ПСЗ (см. рис. 8.8) или в 1<ачестве входного уси�
лителя, !{ которому под!{лючен нагреватель первого тер­
моэле1<трическоrо преобразователя в схеме ПДЗ ( см.
рис. 8.9).
Приведенные структурные схемы имеют, напр,,мер
выпус1<аемые отечественной nромышленностыо Рольтмеr­
ры типов ВЗ-38, ВЗ-39, ВЗ-41 ( среднего значения),
ВЗ-40-ВЗ-42, ВЗ-45, ВЗ-46, ВЗ-48 (действующего
значения).
Эти вольтметры хараl(теризуются чувствительностью
(нижний предел вольтметра ВЗ-40 0,03 мВ, большинст­
ва других -1 мВ), значительно превышающий чувстви­
тельность вольтметров амплитудного значения.
С помощью вольтметров перечисленных моделей
можно измерять напряжения в диапазоне частот 10 Гц50 МГц. Для работы в этом диапазоне предназначены
вольтметры пшов ВЗ-45, ВЗ-48. Верхняя граница частот­
ного диапазона большинства остальных вольтметров сос­
тавляет 5 МГц. Значения приведенных погрешностей в
зависимости от предела измерения и частотного диапа­
зона лежат в пределах 4-l5%. Входное сопротивление
1-30 МОм, входная ем1<0сть 10-40 пФ.
Вольтметры переменного напряжения градуируются,
как правило, в действующих значениях синусоидального
напряжения. При градуировке вольтметра в амплитуд­
ных илп средних значениях на шкале выходного прибора
имеется соответствующее обозначение.
Измерение действующего значения напряжения
вольтметрами, показания !{Оторых пропорциональны ам�
плитудному или среднему значению, сопровождается
198
погрешностями тем большими, чем сильнее форма изме­
ряемого напряжения отличается от синусоидальной.
Вольтметры действующего значе�шя могут строиться
с применением также элекrростатичесl(ОГо механизма. В
этом случае в состав вольтметра входит делитель напря­
жения, усилитель переменного напряжения и элеl(троста­
тический механизм.
Илtпульсные вольтметры, используемые для измере­
ния амплитуды периодической последовательности им­
пульсов, имеют струнтурную схему, соответствующую
вольтметру амплитудных значений (см. рис. 8.13). Та­
кие вольтметры позволяют измерять амплитуду импуль­
сов, следующих со скважностью Q от 2 до 2000-5000,
при длительности импульсов от 0,1 мкс и выше; приве­
денная погрешность 2,5-10%.
Таким образом, при измерении несинусоидальных пе­
риодических переменных напряжений вольтметрами раз­
личных типов получаются отсчеты, соответствуrощв:е раз­
личным значениям измеряемого напряжения. Ес:ш при
этом используются вольтметры, проградуированные в
действующих значениях синусоидального напряжения,
то полученные отсчеты можно использовать следующим
образом.
1. Показание вольтметра ПАЗ с открытым входом
для определения максимального значения измеряемого
напряжения необходимо умножить на коэффициент ам­
плитуды синусоидального напряжения, равный 1,41.
Средневыпрямленное и действующее значения могут
быть определены, если известны коэффициенты ампли­
туды и формы кривой. При ЗаI{рытом входе ПАЗ резуль­
тат будет соответствовать амплитудному знзчению толь­
ко переменной составляющей. Полярность включения
диода в схеме ПАЗ определяет знак измеряе,1ого ампли­
тудного значения.
2. Показание вольтметра с ПСЗ для определения
средневыпрямленного значения измеряемого напряже­
ния делится на коэффициент формы синусоидального
напряжения 1, 11. Амплитуд ное и действующее значения
находятся по коэффициентам амш1итуды и формы, если
они известны.
3. Показание вольтметра с ПДЗ непосредстRенно да­
ет действующее значение измеряемого напряже,-тя. Для
определения средневыпрямленного и амплптуд11ых зна­
чений необходимо знать коэффициент амплrнуды II фор­
мы.
199
8.3. ЭЛЕl(ТРОННО-ЛУЧЕВЫЕ ОСЦИЛЛОГРАФЫ
Электронно-лучевой осциллограф - прибор для визу­
ального наблюдения элеI<тричес[{ИХ процессов, лредст,ш.
ленных в форме напряжения, а также измерения раз.r�ич­
ных параметров сигналов, определяющих их мгновенные
значения и временные характеристики. Кроме того, ос­
циллограф может быть использован для измерения фа­
зового сдвига между двумя синусоидальными напряже­
ниями, частоты и состаnляющих комплексного сопротив"
ления.
Основным узлом осциллографа является элеI<тронно­
лучевая труб1<а, представляющая собой стеклянную кол­
бу, в которой создан вакуум (рис. 8.15). Группа электро•
дов, включающая ка­
Фокус
тод К с нитью накала
+
НН, сетку С и аноды
А 1 и А 2 , образует так
называемую «электрон�
Рис. 8. 15. Электронно-.11уче­
вая трубка.
ную пуш1<у», предназначенную для получения узкого пуч­
J<а электронов-электронного луча. Отклоняющая система
трубки состоит из двух пар пластин: горизонтальные пла­
стины используются для отклонения луча по вертикали
(это вертикально отклоняющие пластины- ВП), вер­
тикаш,ные пластины - д11я отклонения луча по rорн:юн­
тали (это горизонтально отклоняющие пластины - ГП).
Экран Э трубки покрывается специальным веществом люминофором, обладающим способностью светиться под
действием ударяющихся в него элеl(тронов.
Поверхность катода покрывается оксидными вещест­
вами, легко отдающими эле1проны при подогреве с по­
мощью НН. На сетку, имеющую форму цилиндра с от­
верстием в торце, подается отрицательное относительно
катода и регулируемое напряжение, ,юторое использует­
ся для изменения 1<оличества эле1<Тронов в луче и регу­
лирования за счет этого яр1<0сти пятна на э1фане. У1<а•
занная регулиров1<а выносится на переднюю панель ос­
циллографа и снабжается надписью «Яркость».
С помощью системы анодов, на которые поданы по­
ложительные относительно l(атода напряжения, осущест •
200
вляются разгон электронов до необходимой скорости и
фокусировка пучка электронов в точку на экране труб­
ки. Регулировка напряжения, подаваемого на А 1, выно­
сится на переднюю панель осциллографа и снабжается
надписью «Фокус».
Отклонение электронов, летящих между пластинами,
происходит под действием электрического поля, создава­
емого подводимым к пластинам напряжение:-.,. Возника­
ющее в результате смещение светящегося пятна .1а экра­
не определяется следующим приближенным соотноше­
нием:
h � lLV/dcpA2,
где L - расстояние от середины пластины до э1<р:ша;
d - расстояние между пластинами; 1- длина пластин в
направлении движения электронов; .-рл2 - потенциал А2
относительно катода.
Величина
Su = h/V = lL!dЧ>A2
называется чувствительностью трубки. Чувстnительность
трубок, используемых в универсальных осциллографах,
составляет 0,2-0,5 мм/В, поэтому напряжение, подава­
емое на пластины, должно составлять не менее 100200 В, чтобы вызвать перемещение пятна на экране на
50 мм.
Внутренняя поверхность трубки покрывается прово­
дящим слоем металла или графита ( акводаrом), который
соединяется с А 2 • Этот слой служит электростатическим
экраном и защищает трубку от влияпия внешних элен­
трических полей. Для защиты от внешних магнитных по­
лей трубку помещают в кожух из магнитомяrкого мате­
риала (например, пермаллоя).
Изображепие на экране исследуемого напряжения
создается следующим образом. Исследуемый сигнад под­
водится к вертикально отклоняющим пластинам и вызы­
вает смещение луча по вертикали. Для получсння изо­
бражения необходимо, чтобы луч одновременно псрсw.е­
щался с постоянной скоростью по горизонтали, что
достигается подачей линейно-изменяющегося напряже­
ния на горизонтально отклоняющие пластины.
На рис. 8.16, а показан процесс перемещения пятна
на экране осциллографа под действием исследу�моrо
сигнала и(t) (рис. 8.16, б} и развертывающего напряже201
ния (рис. 8.16, в). В начальный момент времени t, пятно
смещается по горизонтали на расстояние х1 относитель­
но центра координатной сетки экрана. Это смещение оп­
ределяется развертывающим напряжением, в этот мо­
мент х1 =Sxttp (/ 1), где Sx - чувствительность трубки по
оси Х (на рис. 8.16 для простоты масштабы смещениq
луча на экране и масштабы напряжений совпадают). В
а}
2'.
1/
>
\
ц
'!;,
�
5 !J, lls� 2
4 )..,/ !/4
т
Х5'
Хч
Х3
Х2
х,
oJ
3
\
5/2, s
4V f
/
/
fs
t1 f2
/tз t4
/
3 ц(t}
Тр
(})
tr
4)J
t
/
f2 / fs.
/f
't
s t4
/ир(f)
r
Рис. 8.16. Принцип создания изображения на экране осцил.qографа.
этот же момент луч по вертикали не смещен, так как
u(t 1) =0. Таким образом, в этот момент луч на экране
находится в точке 1.
В момент времени t2 луч будет смещаться по верти­
кали на y2 =S y и2 (t) (Sy - чувствительность трубки no
оси У), а по горизонтали - на Х2 , что соответствует по­
ложению пятна на экране в точке 2, и т. д. В течение
второго и последующего периодов луч и пятно на экране
будут повторять свое движение. Световая инерция экра­
на и зрения способствует получению на нем немелькаю­
щеrо изображения. Условием неподвижного изображения
является кратность отношения периода развертызающе­
rо напряжения к периоду исследуемого сигнала, т. е.
Tp!T=N, где N-целое чис.�ю. Если N=l, то на экране
создается изображение одного периода исследуемого
cиrнaJia (рис. 8.16,а), если N=2, то наблюдатель ви дит
на экране два периода и т. д.
Помимо электронно-лучевой труб!{И в структурной
схеме осциллографа (рис. 8.17) можно выделить следу­
ющие основные части:
2{)2
1) канал вертикального отклонения (канал У), вклю­
чающий делитель напряжения ДН, усилитель J/y , линию
задержки ЛЗ;
2) канал горизонтального отклонения (канал Х),
ш,л�очающий генератор развертывающего напряжения
(генератор разверт1ш ГР) и усилитель J' х.
канал У
смещение У
вход у---.
- - - - - - -- - �
/JЗ 1--т-�
ДН
Уу
Бft/еШНЯЯ � - :__ - - - - - - - - � _J
синхрониза'6- -1 - - - - - - 1
,,,...
цця 0-:----Т SAt___ 1 ,------t,--, 1 1
Сетебое I Г3,
ГР
JJ(!Jlpяжeнuc 1 ~ sorц ._____. 1,
_, 1 1
'
'
1
г---�====�1--------�.....
Ух t-:-1'_______.,
SA2
Exoд°ir.z
L ________ ...J
канал х
смещение х
Рис. 8 17. Структурная схема осци.�.�ографа.
Необходимость введения усилителей Уу и Ух объяс­
няется малой чувствительностью трубю1, всnедствие чего
наблюдение малых сигналов требует их r:редварнтельно­
rо усиления.
В качестве усилителей Уу универсалы�ых осци.r�.10rрафов используются, как правило, усилители постоян­
ного напряжения, обладающие широкой полосой прlJ­
пускания (f ь = l-;-25 МГц), большим нхо;щым сопротив­
лением и необходимым коэффициентом усиления. Изме­
нение общей чувствительности канала У производится
с по:1,ющью делителя напряжения ДН, позволяющего ус­
танавливать определенные фиксированные ее значения.
Выходной каскад усилителя J/ y имеет симметричный
дифференциальный выход, 1< которому под�щочены от­
клоняющие пластины (рис. 8.18). Изменения анодных
напряжений, обусловленные сигналом, одинаковы по аG­
солютном у значению и противопо.,южпы по :шаку, т. е.
симметричны относительно среднего потенциала анодов
при отсутствии сигнала. Это позволяет П�·{ЛЮ'iИТЬ ИСI{а­
жение изображения на экране из-за измен{·Ння средиеrо
потенциэла пластин, которое возникает при под<1.че сиг203
нала па одну из пластин при соединении другой с общей
точкой. С помощью перемеJJноrо резистора в цепи ано­
дов каскада производится регулировка смещення луча.
Эта регую1ровка выводится на переднюю панеJiь осцил­
лографа и снабжаетс я надписью «Смещение У»,
Канал Х осциллографа (см. рис. 8.17) может рабо­
тать в двух основны х режимах - развертки и усиления
сигнала, поданного на
«Вход Х». Режим работы
канала выбирается с по­
переключателя
мощью
к мастинам SA2: положение 1 соответствует режиму раз,,_ У
�---'.--1---_-_-,_:вертки, положение 2усилению сигнала. В ре­
жиме развертки напря­
жение генератора раз­
вертки ГР через Ух пода­
ется на горизонтально оr­
пластины:.
клоняющие
каскада
выходного
Схема
Р ис. 8.18. Схема выходного
Ух аналогична схем�,
кас�<ада усидите.�я.
приведенной на рис. 8.18;
в схеме каскада предусмотрена регулировка смещения
луча по оси Х.
Как уже от�1ечалось, для получения на экране не­
подвижного изображения необходимо, чтобы период на­
пряжения развертки был равен периоду исследуемого
сигнала или в целое число раз был больше.
Процесс принудительной генерации генератором раз­
вертки напряжения с частотой, равной или кратной час,
тате исследуемого сигнала, называется синхронизащн.й.
Для осуществления синхронизации в схе�,у генератора
ГР вводится синхронизирующий (запускающий) сигнал.
В качестве такого сигнала можно использо!3:-tТЬ исс,1е,1у­
емый или внешний сигнал, частота которого равна или
кратна частоте исследуемого сигнала. Выбор сигнала,
синхронизирующего работу ГР, осуществляется с по•
мощью переключателя SAJ (см. рис. 8.17), расположен­
ного на передней панели осциллографа. С инхронизация
работы генератора развертки исследуемым сигналом
(положение 1 переключателя SA 1) называется внутрен­
ней. При внешней синхронизации (положение 2 пере204
ключателя SAI) на вход «Внешняя синхронизация» не­
обходимv подать синхронизирующий сигнал. В качестве
внешнего синхронизирующего сигнала возможно нс­
пользование сетевого напряжения (положение 3 пере­
ключателя SA 1).
Для обеспечения возмо.жности исследования сигналов
различных частот частота генератора разверr:,и ГР
должна регулироваться в широких пределах. В боль­
шинстве универсальных осциллографов предус�-vю7рена
в озможност1, изменения масштаба по оси Х в пределах
от J 00 мс/см до 0,02 мкс/см.
Генератор разверт1ш имеет два основных режима ра­
боты - непрерывной и ждущей развертки. Ремим непре­
рывной (периодической) развертки используется при ис­
следовании непрерывных периодичес1шх процессов, пе­
риодической последовательности импульсов, имеющих
малую скважность, затянутые фронты и т. п. В этом
случае генератор развертки работает в автоколебатель­
ном режиме, а синхронизирующий сигнал используется
для задания и поддержания частоты развертывающего
напряжения, равной или кратной частоте этого сигнала.
Ждущий режим генератора развертни используется
при исследовании непериодических сигналов, импульсов
с большой скважностью (или даже одиночных импуль­
сов), при измерении фронтов малой длительности и т. п.
В этом случае генератор развертки находится в так на­
зываемом ждущем состоянии, а при поступлении иссле­
дуемого (или внешнего синхронизирующего) сигнала ге­
нерирует толыю один период напряжения разверпш.
На рис. 8.19, а-е приведены временные диагрв ммы
сигналов в схеме осциллографа для двух у1<азанпых ре­
жимов работы генератора развертки при внутренней
синхронизации.
Исследуемый сигнал (рис. 8.19, а) усилив,1ется уси­
лителем J/y, задерживается линией задержки (рис.
8. 19, б) и поступает на вертнкально отклоняющие плас­
тины. Для nолучени11 изображения, занимающего боль­
шую часть экрана, необходимо, чтобы длительность раз­
вертки Тр была несколько больше длительности разверт­
ки импульса t11. Если скважность импульсов велика (т. е.
Q = Tftн -::l> 1), то при непрерывном режиме работы гене­
ратора развертки (рис. 8.19, в) изображение импульса
будет бледным по сравнению с горизонтальной линией,
I<оторая прочерчивается много раз за один период следо·
205
вания импульсов (на диаграмме рис. 8.19, г приnе-дена
nоследовательность кадров, создающих видимое изоGра­
жение, поl{азанное в конце диаграммы).
При ждущем режиме работы генератора развертки
(рис. 8.19, д) за счет увеличения яркости можно добить­
ся хорошего изображения исследуемого импульса (на
О)
D)
6)
т
t
t
t
2}
iJ)
�
��
t
�l2SJ
Рис 8.19. К вопросу о непрерывной и ждущей развертках.
диаграмме рис. 8.19, е приведены последовательность
кадров и видимое изображение).
Как уже отмечалось, синхронизирующий сигнал, вво­
димый в генератор развертки, необходим для принуди­
тельной установки частоты генератора развертки, равной
или кратной частоте синхронизирующего сигнала. В ре­
альных генераторах развертки начало развертки запаз­
дывает относительно синхронизирующего сигнала (на­
nример, на время iзan; (рис. 8.19, в, д). Поэтому, если
используется внутренняя синхронизация и сигнал на
пластины трубки поступит раньше, чем начнется раз­
вертка, изображение начальной части сигнала на эхране
будет отсутствовать. Задержка сигнала с помощью ли­
нии задержки на время, большее, чем iзan, позволяет
nолучить на э1<Ране изображение нача:,ьной части ис­
с.ледуемоrо сигнала, поскольl{у в этом случае сиrн�.1 на
пластины поступает позже начала развертки (рис. 8.19).
На рис. 8.20, а представлены основные элеменl'ы схе206
мы генератора развертки, включающей нсточник то•<а !,
конденсатор С и электронное коммутирующее устройст­
во ЭКУ. Выходная часть ЭКУ представляет собой элект­
ронный ключ, шунтирующий конденсатор. Схема генера­
тора развертки работает следующим образом. При
размыкании электронного ключа конденсатор начинает
заряжаться от источника тока /, при этом приращенпе
напряжения на конденсаторе происходит по линейно му
закону uc=lt/C (рис. 8.20, 6). В момент, когда напря­
жение на конденсаторе достигает определенного значе­
ния, электронное коммутирующее устройство замы1{ает
электронный ключ и начинается разряд конденсатор.=!,
который заканчивается достаточно быстро. В автоколе­
бательном режиме работы генератора разверпш пocJJe
разряда конденсатора электронный ключ вновь размы­
кается и далее процесс повторяется. В ждуще.11 режиме
J/Cilyщuii
Непрерыбный
,____р_е_ж�им Гr.'1
режим
С
ЗКУ
Л\
uc(f)
....___.сuнх12онизиру- \.._/"
о)
ющии сигнал
oJ
4.
/t
'-..,/"'
Рис. 8.20. 1( принципу действин генератора развертки.
после замыкания электронного ключа и разр,1да конден­
сатора это состояние генератора развертки сохраняется
до прихода запускающего сигнала. Переход от �вто�<о­
лебательноrо к ждущему режиму осуществляется с по­
мощью специальной регулировки (рис. 8.20, а), выводи­
мой на переднюю панель осциллографа. Скорость
нарастания напряжения на конденсаторе, определяющую
масштаб по оси Х, можно регулировать путем измене­
ния значений / и С. Современные универсальные осцил­
лографы имеют ряд (до 40) фю,сированных значений
масштаба по оси Х. Выбор необходимого масштаба осу­
ществляется с помощью специального переключателя на
передней панели осциллографа.
Наиболее важными с точки зрения прпменения ос­
циллографа являются следующие его техничес1;ие хар:ш­
теристики:
1) чувствительность канала У (S y ) или •юэффициент
отклонения К у = 1/S y, коэффициент Kr, В/см, использу­
ется чаще, чем S y ; обычно Ky=lO мВ/см-;-20 В/см;
207
2) полоса пропускания осциллографа, которая опре­
деляется диапазоном частот, в котором неравномерность
АЧХ канала У не превышает 30%;
3) диапазон скоростей развертки;
4) входное сопротивление (обычн о R nx=0,5; 1;
10 МОм) и входная емкость (Cnx= 10+50 пФ);
5) погрешность измерения напряжения и длительно­
сти временных интервалов [ не более + ( 10-3) % ] •
Выбор того или иного осциллографа при исследова­
нии процессов производится в зависимости от сигнала и
его спектра, мощности источнина сигнала, требуемой
точности измерения, т. е. с учетом, по меньшей мере, тех
технических характеристик, которые перечислены выше.
Помимо рассмотренных однолучевых осциллографов
выпускаются также двухлучевые осциллографы (на ос­
нове двухлучевых трубон) с двумя независимыми и
идентичными каналами У и общим каналом Х.
Приборостроительная промышленность в СССР вы­
пускает несколько десятков типов универсальных осцил­
лографов, позволяющих исследовать разнообразные
электрические сигналы в широком диапазоне амплитуд,
длительностей и частот повторения сигнаJiов.
8.4. ЭЛЕl(ТРОННЫЕ ОММЕТРЫ
Э.лсктронные омметры (подгруппа Еб) широко испо.'!Ъзуются
для измерения активных соnротив.�ений в диапазоне 10-1-1012 Ом
при измерении соnротив.qений резисторов, изоляuии, контактов, по­
верхностных и объемных сопротивлений и др.
В основе бо.'1Ъшиt1ства электронных омметров .�ежат достаточ­
но простые схемы. Для омметра, схема которого приведена на
рис. 8.21, а, напряжение на входе усилите.qя постоянного напряже-
С>
а)
li)
Рис. 8.21. Схемы э.qектронных омметров.
ния равно Uy= ER.x/(R.x +R.c ). При Ro »R x это напряжение nропор­
щюна.'IЪНО измеряеыому соnротив.�енюо Rx н шкала прибора ИП
(маnщтоэ.qектрической системы) .�инейна от11осите.%11О Rx ( Uy ""
R>ER.x/R.o). Во втором омметре, схема которого дана на рис. 8.21,6,
обы•1ио Rx»Ro, и поэтому показания выходного прибора обратно
пропорциональны измеряеыому сопротив.qению, т. е. шкада прибора
обратно пропорционмьна измеряемому сопротивлению и носит rи­
пербо.'!ический хара1<Тер (Uy ""ERo/Rx). В рассматриваемых оммет­
рах предполагается, что входное соnротив.'!еиие усилителя Rвх ОТ·
вечает условинм Rnx'»Rxmax (в gервом С.'!учае) и Rnx"»Ro (во втО•
ром С.'!учае), а входной ток уси.'lите.'!Н (сеточньн'.\ ток) достаточно
мал по сравнению с током через резисторы Ro и Rx.
В э.'lектронных омметрах широко нспо.qъзуются также линей­
ные преобразоватс.'!И измеряемоrо сопротивления в напряжение
I[-
Рис. 8.22. Схема э.'!ектронrюrо
омметра на основе усн.'lителя с + о-__.,__u...,;ч
обратной связью.
RIJ,l,
[>-
на основе уси.'!ите.'!ей nостоян11оrо напряжения, охваченных пара.'!•
.'!елыюй ООС. На рис. 8.22 приведена схема такого омметра. Цепь
ООС образована резисторами Ro и Ro, c=Rx. Если tшэффициент уси•
ления l( достаточно большой, то даже при маr<сима.qьном выход11ом
напряжении усилитеJ1я напряжение на его входе ма.'!о по сравнс11шо
с Uв=,,,ах(Uу= Uвых,па:х/К). Выбрав E-»Uy, по.'!учим, что / 1 =
=(E-Uy)/R o�E/Ro. В свою очередь, l2 =(Ивых+Uу)/Rо,с. Пренеб•
регая входным током уси.'!Ителя по сравнению с [1 и /2, по.'!учаем
!1�/2. Из этого следует, что Unыx""ERx/R0 . Т�шим образом, выход­
ное напряжение усилите.'!я пропорционально измеряемому conpo•
тив.'!ению. При измерении достаточно больших сопротивлений рези­
сторы R" и R o в схеме (рис. 8.22) меняют местами, и тогда Иных""
""ERo/Rx. т. е. 110.'!у,1ается rиnерболическая зависимость выходного
напряжения усиш1те.'!я от измеряемого сопротив.'!ения.
Точность омметров при .'!инейной шка.че характеризуется при­
веденной погрешностью по отношению к преде.'!у измерения. При
не.'!Инейно11 (пшерболической) шка.'!е погрешности прибора также
характеризуются приведенной погрешностью (в процентах), но по
отношению 1< д.�ине ш1<аm,1 lm11, выраженной в мпл.qиметрах, т. е.
Лl
10:Э. В
v = --
этом CJiyчae под значением предеJiа доnус1<аемой ос­
lшн
новной приведенной погрешности, - обозначающей KJiacc точности,
ставится значок V , например 1,5; 2,5 и т. д.
'(/
V
В СССР выпускается нескот,ко типов электронных омметроо.
Омметры типов Еб-12, Еб-15 имеют структурную схему, близкую
к схеме, приведенной на J>ИС. 8.21, а. Преде.'!ы измерения О,0010,003-... -10 ООО Ом, nриведен11ая nогрешrюстъ 1,5-2,5%. Оммет­
ры типов Еб-10, Еб-13 имеют стру1<турную схему, nриведеи11ую на
рис. 8.21, б. Предеды измерения 100-300-1000 Ом; 3-10-... 1000 кОм; 1-3-... -107 МОм; приведенная погрешность 1,5-2,5 %.
8.5. ИЗМЕРИТЕЛЬНЫЕ ГЕНЕРАТОРЫ
Измерительные генераторы являются источниками
электрических колебаний, форма которых заранее нз•
вестна, а частота, напряжение (или мощность) и некото-
14-970
209
рые другие параметры сигналов могут регулироваться в
оnределенпых пределах и отсчитываться (или устанав­
ливаться) с гарантированной для данного прибора точ­
ностыо.
Генераторы гармонических (синусоидальпых) 1юле­
баний охватывают диапазон частот в пределах: низко1 ЗГ
н н
УН
Yf1 н Ат
н
СТ
�
Рис. 8 23. Структурная схема измерительного генератора гармоничес­
ких колебаний (подгруппа ГЗ).
частотные (подгруппа ГЗ) - от сотых до."Iей герца до
200 кГц (2· 105 Гц), а высокочастотные (подгруппа Г4)­
от 200 кГц до 10 ГГц (10 10 Гц) и выше. Среди импульс­
ных измерительных генераторов (подгруппа Г5) наибо­
лее распространенными являются генераторы прямо­
угольных и111пульсов с длительностью импульса от 10-9
ДО 1 С.
Все измеритеnьные генераторы должны отвечать оп­
ределенным техническим требованиям в отношении фор­
мы генерируемых колебаний, диапазона генерируемых
частот, погрешности установки частоты и ее нестабиль­
ности, пределов измерения и погрешности установ1<и вы­
ходного напряжения (мощности), выходного соп;:ютио­
ления. Измерительные генераторы широко используются
при проведении исследовас, Rt
ний, в качестве источников
питания ИЦ (например, мо­
стовых), ИП и в других слу­
чаях.
Структурная схема ге­
нератора гармонических ко­
лебаний
приведена
на
Рис. 8.24. Задающий генератор
RС-типа.
рис. 8.23. Задающий генератор ЗГ является источником
колебаний, частота которых может регулироваться в
широких пределах. С помощью усилителя напряжения
УН и усилителя мощности УМ генерируемые колебания
ус иливаются no амплитуде и мощности. Выходное уст•
210
ройство BJI, состоящее из аттенюатора Ат и согласую­
щего трансформатора СТ, предназначено для создания
на нагруз!(е заданного напряжения (мощности), а та!(ЖС
для согласования выходного сопротивления генератора
с сопротивлением нагруЗ!(И.
В 1<ачестве задающего генератора используются схе­
мы RС-генераторов и генераторы на биениях. Схема
RС-генератора представляет усилитель, охваченный по­
ложительной частотно-зависимой и отрицательной час­
топю-независимой обратными связями (рис. 8.24).
В режиме генерации выходное напряжение сnязано с
напряжением, действующим на входе усилителя, выра­
жением
(8.14)
Ивых = KVy,
где /( - 1(0Мnле!(сный коэффициент усиления усилителя.
Вь1ход11ое напряжение цепи положительной обратной
связи (ПОС), образованной резисторами R 1, R2 и !(ОН­
денсаторами С1 , С2, подается на неинвертирующий вход
усилителя. Инвертирующий вход усилителя подключен
1( выходу цепи ООС, образованной терморезистором R4
и резистором R3 •
Тюшм образом, напряжение на входе усилителя рав­
но:
(8.15)
(J у =А + (;вых _А (Jвых =(А�+ _А...._)Ивых•
1
r
r-
где �+ - комплексный коэффициент передачи цепи ПОС;
�-.::: комплексный 1юэффициент передачи цепи ООС.
- Подставив (8.15) в (8.14), получим соотношение
(8.16)
!5 (�+- р_) = l,
которое является условием устойчивости генерации.
Форма выходного напряжения генератора будет си­
нусоидалыюй, если (8.16) будет выполняться толы<о на
одной частоте. Усилитель генератора должен иметь рав­
номерную АЧХ во всем генерируемом диапазоне частот.
Поэтому будем считать, что коэффициент усиления не за­
висит от частоты и усилитель не вносит фазового сдвига,
т. е. К=К. Цепь ООС также не дает фазового сдвпrа, п
ее !(Оэффициент передачи пе зависит от частоты, поэтому
1 Вход усилителя называется неинвертирующим, если фазы
(полярности) вход1юrо и выходного сигналов совпадают. Вход
уси.щтеля называется инвертирующим, если фазы (полярности)
входного и выходного сигнала противоrю,1ожны.
14*
211
/3-=/3-=Rз/(Rз+R4 ). Коэффициент передачи цепи ПОС
(при-С 1 =С2=С и R1 =R2 =R)
-+
- = �+ е1'Р+,
3 -1----i ( wCR - 1 / wCR)
=1
13
Учитывая приведенные
(8.17) в (8.16), получаем:
замечания
К/3+ ei'P+ - К/3- = 1, или К/3+ е1ч,+
(8.17)
и подставляя
= 1 + К/3-,
Последнее условие распадается на два условия:
1) условие баланса амплитуд
К/3+ = l + К/3-,
2) условие баланса фаз
(J)+ = О.
Условие баланса фаз выполняется, 1<ак это следует
из (8.17), толы<о на частоте <uo=l/RC, которая и будет
частотой генерации. В более общем случае (JJ+ может
быть не только равен нулю, но и кратен 2n (360°), т. е.
(J)+=2nn (n=0, 1, 2, 3 ... ). На частоте ro=roo необходимо,
чтобы К=1/(/3+-13-), что следует из ( 8.16). Если цепь
ООС отсутствует, то требуемое значение К=1/13+=3.
Однако при небольших значениях К генерация неустойчи­
ва, а стабильность частоты невысока; поэтому делают
К-:;:р 1. В этом случае требуемое значение /3-=13+-17К.
Поскольку значения 13+ и К могут меняться в некоторых
пределах, требуется подстройка значения 13-, что в схеме
генератора достигается автоматически. Для этого в ка­
честве R4 испо.ТJьзуется терморезистор. Если, например,
К возрастает, то амплитуда выходного напряжения уве­
личится, ток через R4 увеличится, и мощность, выделяе­
мая на R4, возрастет. Это п риведет к повышению темпе­
ратуры терморезистора, а следовательно, к уменьшению
его сопротивления. Поэтому f3- начнет возрастать и че­
рез некоторое время примет значение, соответствующее
выполнению условия (8.16). За счет этого достигается
таюке и стабилизация амплитуды выходного напряжения
генератора.
Регулирование частоты генератора производится пу­
тем изменения сопротивлений резисторов R1 , R2 и ем1юс­
тей конденсаторов С 1 , С2 . Обычно сопротивления резис­
торов изменяются ступенчато, так •1то на соседних под­
диапазонах их значения отличаются в 10 раз. В качест212
ве 1<01-щенсаторов С1 и С2 используется воздушный
сдвоенный конденсатор, емкость которого изменяется
плавно и отношение Стах/С ,,.;,,";:!:; 10. Это дает возмож­
ность плавно изменять частоту в каждом поддиапазоне,
отношение I<райних частот которого fmax!fmiii составJ1яет
не менее 10.
В состав задающего генератора на биениях (рис. 8.25)
входят два генератора: Г 1 и Г2. Частота одного из них,
например Г2, может меняться в не1юторых пределах. Ко•
Рис. 8.25. Структурная схема
задающего генератора на бие­
ниях.
Г1
rz
См
ф
лебания двух генераторов поступают на смеситель См, в
котором происходит перемножение этих напряжений, в
результате чего выходное напряжение смесителя содер­
жит колебания с частотами, равными сумме и разности
частот генераторов Г 1 и Г2. С помощью фильтра Ф вы­
деляется разностная частота F=f 1-fz . Начальная часто­
та Г2 f2н выбирается равной f1• Диапазон изменения час­
тоты F будет равен диапазону изменения частоты f2.
В качестве генераторов Г 1 и Г2 применяют LС-rене­
раторы, в которых частота генерируемых колебаний оп­
ределяется ем1<остыо С и индуктивностью L колебатель­
ного контура, включенного в цепь положительной обрат­
ной связи, охватывающей усилитель:
fo = l/2л VLC
Обычно изменение /2 по отношению к f2,, не превыша­
ет 10%. Для получения частотного диапазона измери­
тельного генератора в пределах 20 Гц - (20-40) кГц
значение f211 должно составлять 200-400 кГц. Основное
достоинство задающего генератора на биениях - воз­
можность плавной перестройки частоты в широком диа­
пазоне частоты (например, 20-20 ООО Гц). Такой диапа­
зон частот с использованием задающего генератора
RС-типа приходится перекрывать тремя поддиапазонами
(20-200; 200-2000; 2000-20 ООО Гц). В измерительных
генераторах подгруппы ГЗ, выпускаемых в СССР, обычно
используются задающие генераторы RС-типа.
213
Усилитель мощности имеет трансформаторный выход.
К выходной обмотке подсоединяются вольтметр и атте­
нюатор. Нагруз1<а подJ<лючается с помощью согласующе­
го трансформатора СТ, первичная обмотка которого со­
единена с выходом аттенюатора (рис. 8.26). Технические
характеристики измерительного генератора (значение
выходного напряжения на наrрузI<е или отдаваемой мощ-
Рис. 8.26. Схема выходной частн генератора гармонических колеба­
ннй.
ности, возможность измерения этого напряжения встро­
енным вольтметром, форма кривой) гарантируются при
подключении тольl{о определенной нагрузки. Сог.пасую­
щий трансформатор позволяет провести согласование
для нескольких определенных значений нагрузки (на­
пример, как это показано на рис. 8.26, для 60, 600,
6000 Ом). Если сопротивление нагрузки велико (R 11ar �
� 6000 Ом), то согласование достигается за сt1ет подклю­
чения внутренней нагрузки 600 Ом. Шкала встроенного
вольтметра градуируется при согласованной нагрузке.
Аттенюатор позволяет ослаблять сигнал ступенчато.
Вводимое ослабление измеряется в децибелах и опреде­
ляется следующим образом:
А = 20 lg (UofU),
где U0 - напряжение на нагрузке при А=О; U - напря­
жение на нагрузке при введении ослабления, равного А.
Например, при отсутствии ослабления установлено
И0 =1 В. Введение ослабления А=40 дБ приводит к
уменьшению напряжения на нагрузке в 100 раз, т. е. до
10 мВ.
Выпус1<аемые в СССР измерительные генераторы
подгруппы ГЗ различаются в основном по метролоrиче­
с1шм характеристикам. Так, относительная погрешность
установки частоты составляет 1 % для генератора типа
ГЗ-102, 3% для генераторов ГЗ-106, ГЗ-107. Погрешность
214
установки выходного напряжения равна 5-8% для ге­
нераторов ГЗ-102, ГЗ-106 и 0,5-1,5% для генератора
ГЗ-107.
Высокочастотные генераторы {подгруппа Г4) имеют
структурную схему более сложную, чем схема, приве­
денная на рис. 8.23, так как в таrшх генераторах преду­
смотрены дополнительные функциональные возможно•
сти, например режимы амплитудной или частотной мо­
дуляции выходного сигнала генератора, стабилизация
амплитуды и др.
8.6. ЛАБОРАТОРНАЯ РАБОТА № 7. ИЗУЧЕНИЕ
Э.rtЕl(ТРОННО-ЛУЧЕВОГО ОСЦИЛЛОГРАФА
И ЕГО ПРИМЕНЕНИЕ
Задание
1. Ознак,шиться со схеыои лаборатор1юrо стенда (рис. 8.27),
записать данные осuиллографа.
2. Ознакомиться с методическими указаниями по эксплуатации и
применению осциллографа (рекомен->
Рис. 8.27. Схема лабораторного стен­
да работы № 7.
дуемый тип осциллографа Cl-68, Cl-72), подготовить осциллограф
к работе.
3. Присоединить вход канала У к зажимам /-/'. Режим синхро­
низации - от сети или внешним сигналом, снимаемым с зажнмоu
3-3'. Поставить пере1<Л1очатель S.i'I в положение / и изменением
коэффициента отклонения канала У получить на экране изображе­
ние в пределах рабо,1ей части экрана. Выбором масштаба канала Х
добиться на экране изображения од11оrо-двух периодов напряжения.
Измерить амплитуду напряжения и рассчитать ero действующее
значение.
Зарисовать осциллограмму напряжения на кальке, нанести на
нее предварительно координатную сетку экрана.
4. Перевести переключатель SA в положение 2, измерить напря­
жение Uп и рассчитать действующее значение тока (R=З кОм).
Зарисовать осциллограмму напряжения Uл, повторяющего в
масштабе кривую тока /.
5. Рассчитать модуль комплексного сопротивления цеп11.
6. По зарисованным осциллограммам напряжения и тока оп­
редеJIИть фазовый сдвиг между ним11.
7. Прнсоедннить вход канала У к зажимам 1-1', поставить пе­
реключатель SA в положение /. Подключнть вход канала Х к за•
жимам 2-2', канал Х перевести в реж11м усиления. Изменением коэф215
фициеJJта отклонения канала У добиться изображения эллипса в
пределах рабочей •1асти экрана. Измерить фазовый сдвиг между U
и / методом эллипса.
8. Состаnить отчет по требуемой форме.
8 7. ЛАБОРАТОРНАЯ РАБОТА .№ 8.
ИЗУЧЕНИЕ РАБОТЫ ЭЛЕКТРОННОГО ВОЛЬТМЕТРА
Задание
1. Ознакомиться со схемой лабораторного стенда, записать дан­
ные прнборов.
2. Ознакомиться с методическими указаниями по эксплуатации
и применению прибороD.
с
г�-107
Рис. 8.28. Схема лабораторного стенда работы Jlio 8.
3. Собрать схему, приведЕ:нную на рис. 8.28. Снять АЧХ преоб­
разователя амплитудного значения в диапазоне частот 20 Гц-20 кГц
при Ивх= 5 В .
4. Зарисовать осниллограммы напряжений (на частоте 2000 Гц
при Ивк= 5В) на зажимах 1-1', 2-2· и 3-3', используя электронный
осциллограф.
5. Собрать схему на рис. 8.29. Измерить выходное напряжение
трансформатора тока ТА (с помощью трансформатора тока осуще-
Рис. 8.29. Схема подключения вольт­
метров к источнику несинусо11дально­
го напряжения.
ствляется искажение форl\lы кр,шой напряжения), используя вольт­
метры амплитудного, срещ,его и действующего значений. Зари­
совать осциллограмму выходного напряжения трансформатора то­
ка. Объяснить полученные резу.%таты.
6. Составить отчет по требуемой форме.
ГЛАВА ДЕВЯТАЯ
ЦИФРОВЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ И
АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
9.1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ, ОБЩИЕ СВОПСТВА
ЦИФРОВЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРов·
И АНАЛОГО-ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕП
Цифровой измерительный прибор (ЦИП) - это из­
мерительный прибор, в котором входной сигнал преоб­
разуется в дискретный выходной сигнал и представляется
в цифровой форме. Под дис1{ретным сигналом пони­
мают прерывистый сигнал, в котором информация со­
держится не в интенсивности носителя сигнала (напри­
мер, в значениях напряжения, тока), а в числе э.пемен­
тов сигнала (например, в числе импульсов напряжения)
и их взаимном расположении во времени или простран­
стве. Систему таких сигналов для представления инфор­
мации называют кодом. Измеряемая величина, подавае­
мая на вход ЦИП, является величиной непрерывной, т. е.
на конечном интервале она имеет бесчисленное множе­
ство значений. Непрерывную
N
величину часто называют
аналоговой величиной. Та­
АЦП
ким образом, в любом ЦИП
->
Рве. 9.1. Обобщенная структурная
схема ЦИП.
!l'd
входная аналоговая величина преобразуется в цифро­
вую форму и представляется в виде ряда цифр на ниф­
ровом отсчетном устройстве. Процесс преобразования
а1-1алоговой формы сигнала в цифровую называется ана­
лого-цифровым преобразованием, а преобразователь
осуществляющий это преобразование, - аналого-цифро­
вым преобразователем (АЦП).
Обобщенная функциональная схема ЦИП показана
на рис. 9.1. Измеряемая величина Хизм подается на вход­
ное устройство ВУ, предназначенное для масштабного
преобразования входной величины и отдеJ1ения ее от по­
мех, если они имеются. Аналого-цифровой преобразова­
те.'IЬ преобразует величину х в код N, который подается
па цифровое отсчетное устройство ЦОУ, где индицирует217
ся в виде ряда цифр; код N может выводиться и во
внешние устройства, например в ЭВМ Д,f[Я дальнейшей
обработки или хранения. Управ.rшет работой ЦИП
устройство управления У.У путем выработки определен­
ной последовательности командных сигналов во все
функциональные узлы ЦИП.
Аналого-цифр"овые преобразователи имеют важное
самостоятельное значение. Они широко используются
для связи первичных преобразователей электрических и
неэлектрических величин с цифровыми вычислительны­
ми машинами, микропроцессорами и другими устройст­
вами накопления и обработ1ш результатов наблюдений.
Отличие АЦП от ЦИП состоит в повышенном быстро•
действии и отсутствии цифрового отсчетноrо устройства.
По виду измеряемых величин ЦИП подразделяются
на:
1) вольтметры постоянного и переменного тока;
2) омметры и мосты постоянного и переменного тока;
3) 1<омбинированные приборы;
4) измерители частоты и интерваJюв времени;
5) специализированные ЦИП, предназначенные для
измерения температуры, массы грузов, скоростей, време­
ни срабатывания различных элементов и т. п.
Диапазон измеряемых посредством ЦИП величин
обычно широ1шй и разбивается на ряд поддиапазонов.
Выбор нужного поддиапазона в процессе измерения про·
изводится вручную или автоматическл. Измерение на
выбранном поддиапазоне всегда происходит автомати•
чески.
Нормирование погрешностей ЦИП и АЦП произво­
дится нес1юлышми способами:
1) нормированием приведенной погрешности;
2) нормированием относителы10й погрешности дву­
членной формулой вида
где а, Ь, с, d - постоянные 1юэффициенты; х11 - верхнее
значение поддиапазона; х - показание прибора;
3) заданием абсо.1Jютного значения погрешности, вы­
раженной в единицах отсчета.
Наиболее часто применяется второй способ нормиро·
вания погрешностей
218
9.2. ЦИФРОВЫЕ ВОЛЬТМЕТРЫ ПОСТОЯННОГО
И ПЕРЕМЕННОГО ТОКА
Цифровые вольтметры (ЦВ) постоянного тока со­
ставляют наиболее распространенную группу ЦИП. Они
позволяют из�rерять напряжение в диапазоне от 1 м1<В
до 1000 В с погрешностью 0,01-0,1 % при быстродейст­
вии от 2 до 5000 измерений в секунду и входном сопро­
тивлении 10 9 -10 7 Ом. Аналого-цифровые преобр азова­
тели ЦВ строятся на основе различных методов преоб­
разования, однако чаще всего применяются методы
уравновешивающего преобразования и методы интегри­
рования. Аналого-цифровые преобразователи уравнове­
шивающего преобразования обладают высоким быстро­
действием (до 100 ООО преобразований в секунду), высо­
кой точностью преобразования, но имеют низкую поме­
хоустойчивость.
Аналого-цифровые преобразователи
двухтактного интегрирования при сравнительно невысо­
ком быстродействии (4-25 преобразований в секунду)
обладают высокой точностью и высокой помехоустойчи­
востью.
Структурная схема ЦВ уравновешивающего преоб­
разования показана на рис. 9.2. Измеряемое напряжение
SAf'-
1
ffSAЗ'
�USA4
g� �
ф
[f,,i__
..L.1.__..L-__.____,
Y!J
Рис. 9.2. Структурная схеыа цифрового вол1,тметра уравновешиваю­
щего преобразовання.
Их непосредственно (переключатели SAJ и SA2 в пози­
ции /) или через делитель напряжения ДН (переключа­
тели SAJ и SA2 в позиции 2), с помощью которого вы­
бирается нужный подднапазон измерения, а затем qерез
фильтр Ф или непосредственно подается на пере1<лю­
чатель SАЗ. Фильтр Ф предназначен для отделения сиг­
нала от помех промышленной частоты 50 Гц и имеет два
выхода с подавлением помехи в 40 и 60 дБ соответствен­
но. Фильтр, подавляя помехи, одновременно увеличива219
ет инерционность ЦВ, и тем больше, чем rлубже подав­
ление помехи. Поэтому, если нужды в фильтре нет, его
выключают путем перевода SАЗ в позицию 1. Делитель
напряжения имеет входное сопротивление 10 МОм; этим
значением и опреде:1яется входное сопротивление вольт­
метра при измерении напряжений свыше 3 В. Если Их <
<3 В, то делитель напряжения выключается и Их по­
дается через SАЗ и SA4 непосредственно на вход срав­
нивающего устройства СУ, 1<0торое обладает большим
значением входного сопротивления ( l 09- 1010 Ом). На
второй вход СУ подается к омпенсирующее напряжение
Ии, снимаемое с выхода регулируемого делителя напря­
жения РДН. Максимальный диапазон изменения Ин=
=073 В; этим объясняется требование Ux �3 В. Регу­
лируемый делитель напряжения представляет собой це­
почку определенным образом составленных резисторов,
которые пере1шю 11аются либо электромеханическими, ли­
бо транзисторными переключателями, при этом коэффи­
циент передачи делителя Кд прямо пропорционален ко­
ду N, поданному на переключатель РДН:
К д =aN,
где а - коэффициент пропорциональности.
Напряжение на вход РДН+U0 поступает от источ­
ника опорного напряжения ИОН. Полярность напряже­
ния этого источника выбирается автоматически в соот­
ветствии с полярностью Их . Очевидно, что U11= KдUo.
Устройство управления УУ автоматически устанавлива­
ет в схеме равновесие Ин= Их = КдVо= аV0 N, откуда
N =ИJаИ0,
т. е. зависимость между кодом и измеряемым напряже­
нием имеет вид прямой пропорциональности. Затем код
N подается на цифровое отсчетное устройство, где в ви­
де цифр отображается значение измеряемого напря­
жения.
Переключатель SA4 имеет положения 2 и 3 для кор­
рекции аддитивной и мультипликативной составляющих
погрешности ЦВ. В случае коррекции аддитивной со­
ставляющей погрешности SA4 переводится в позицию 2,
при этом на левый вход СУ подается сигнал, соответ:::т­
вующий нулевому уровню. Если в схеме имеется источ­
ник аддитивной погрешности, то на отсчетном устройст­
ве ЦВ появится число, отличное от нуля. Плавной pery220
,лировкой напряжения на выходе РДН посредством спе­
циального резистора добиваются нулевого показания на
отсчетном устройстве ЦВ. На этом регулировка заканчи­
вается. При коррекции мультип.т1икативной составляю­
щей погрешности переключатель SA4 переводится в по­
зицию 3 и ко входу СУ подключается нормальный эле­
мент с ЭДС, равной 1,0186 В. Очевидно, что показание
ЦВ должно соответствовать этому значению напряже­
ния, в противном случае регулируется выходное напря­
жение ИОН до получения указанного соответствия. По­
скольку ИОН выдает напряжение Ио двух полярностей,
то коррекция производится как при положительном, так
и при отрицательном значении И0 • Руч1ш управления ре­
зисторами коррекции аддитивной и мультипликативной
погрешностей выносятся на лицевую панель прибора.
УУ
Рис. 9.3. Стру1<турная схема цифрового вольтметра, реализующего
метод двухтактного интегрирования.
Режим работы ЦВ может быть разовый или перио­
дический и устанавливается посредством соответствую­
щих переключателей на лицевой панели прибора.
Структурная схема ЦВ, реализующеrр метод двух­
тактного интегрирования, ЛОI{азана на рис. 9.3.
Измеряемое напряжение Их непосредственно (пере­
ключатели SAJ, SA2 в позиции 1) ИJIИ через делитель
напряжения ДН (SAJ, SA2 в позиции 2), с помощью
которого выбирается нужный поддиапазон измерения,
затем через фильтр Ф (SA3 в позиции 2) или непосред­
ственно (SA3 в позиции 1) подается на к.r1юч SA4. Сис­
тема ключей SA4, SA5, SA6 предназначена для подачи
на входной усилитель ВУ измеряемого или одного из
опорных напряжений положительной или отрицательной
полярности, последние вырабатываются источником
221
опорных напряжений ИОН в виде высокостабильных
одинаковых по абсолютной величине, но разных по зна­
ку напряжений постоянного то1<а.
Входной усилитель представляет собой усилитель по­
стоянного тоI<а с большим входным сопротивлением (бо­
лее 1000 МОм) и реrу.rшруемым посредством ООС коэф­
фициентом усиления. Если Их <lО В, то обычно оно по­
дается на ВУ непосредственно (SAI, SA2 в позиции 1);
при этом входное сопротивление ВУ более 1000 МОм.
Если же Их > 10 В, то оно подается на ДН (SAI, SA2 в
позиции 2) и входное сопротивление ЦВ определяется
вхол:ным сопротивлением ДН, значение которого обычно
1 О МОм. При измеренпи напряжений менее одного во.11ь­
та, например на поддиапазонах 0,1 и 0,01 В, коэффици­
ент усиления ВУ выбирают соответственно равным 10
или 100 с тем, чтобы напряжение на выходе ВУ изменя­
лось в одних пределах независимо от выбранного под­
диапазона измерения.
К. выходу ВУ подключен интегрирующий преобразо­
ватель ИнЛ на основе операционного усилителя с кон­
денсатором в цепи ООС. Резистор R преобразует входное
напряжение ИнП в пропорциональное значение тока ix =
=VxKл Ky /R, rде Кл и КУ - коэффициенты передачи ДН
и ВУ; для вык.ТJюченного ДН (SAJ, SA2 в позиции /)
Кд =l. Этот ток, если пренебречь входным током уси­
Jштеля ИнП, протекает через конденсатор С и заряжает
его, при этом выходное напряжение ИнП возрастает.
Обозначим U 1 напряжение на выходе ИнП (в точке б
рис. 9.3) в момент t 1 окончания заряда конденсатора:
1 t ··
.
U1 = - � t . dt =
С ,
о
х
кд кУ
RC
t
s·
о
U х dt.
Обозначим далее Ихср среднее значение измеряемого
f/апряжения на интервале от О до t 1 , тогда
U 1-
К К
д у U
RC
t
хе)) I•
В момент t=t1 1<Люч SA4 размыкается и замыкается
SA5 или SАБ. Теперь на вход ВУ подается опорное на­
пряжение, полярность которого выбирается так, чтобы
оно было противоположным полярности Uх и снимаJю
заряд с 1<0нденсатора С, накопленный за время замкну­
того состояния SA4.
На рис. 9.4 показана временная диаrрамма напряже­
ний в точках а и б (см. рис. 9.3). На диаrрамме видно
два такта в цикле работы преобразователя: первый такт
длительностью t1 соответствует заряду конденсатора С,
второй такт длительностью t2 - ero разряду. Это и по­
служило основой для названия метода преобразования двухтактное интеrрирование.
Момент окончания интервала f2 соответствует момен­
ту прохождения выходным напряжением ИнП через нуt:
Рис. 9 4. Диаграм'l!а напряжений на
входе и выходе ИliТегрирующеrо пре­
образователя.
Рис. 9 5. Схема 1<ванто­
вания второго пнтервала
ЦВ двухта1<тноrо инте­
грирования
левой уровень, что фиксируется сравнивающим устрой­
ством СУ. Напряжение U2, до котороrо разрядится кон­
денсатор за время t2 , равно:
И2
t,
=
f f iadt= �
о
,,
Jиodt,
u
где io=Uo/R - входной ток интегрирую1цеrо преобразо­
вателя, вызываемый напряжением U0•
Значение U0 постоянно и во времени не меняется, по­
этому
И2 = К.у Uot2 ,
RC
Так как напряжение на выходе интеrрирующеrо пре­
образователя ИП в начале и конце цикла измерения
равно нулю, то справедливо равенство
И1 = И2,
одставив
в
которое полученные выше выражения, пос­
п
ле сокр ащения одноименных величин, получим:
Кд И хср f1 = Uof2,
22J
откуда
=
Кдt1 И •
хер
Uo
Величины Кд, t1 и И0 выбираются постоянными, это
обеспечивает зависимость между Их ер и t2 вида прямой
пропорциональности. Интервал t2 измеряется путем за­
tюлнения импульсами напряжения высокой частоты со
стабильным периодом t0 (рис. 9.5) и последующим их
подсчето:v1. Обозначим N число импульсов, которое укла­
дывается на интервале t2, тогда
f2
N
-
12
- Kд tl
и
р
--;;:- Uofo хе •
Интервал времени t 1 обычно задается тем же гене­
ратором высокой частоты путем подсчета счетчиком им­
пульсом определенного чисJiа N0 периодов колебаний это­
го генератора t 1 =N0 t0• Подставив значение t1 в уравне-'
ние для N, получим окончательно:
N-
N
Кд о Ихер•
- Uо
Величины Кд и И0 стабильны, а N0 - число, поэтому
связь между N и Их ер от.тн1чается высокой стабиль­
ностью.
Число N в виде кода подается на цифровое отсчетное
устройство ЦОУ (см. рис. 9.3) и через специальный разъ­
ем может быть выдано во внешние устройства (ЭВМ,
память и т. п.).
Операция разбиения интервала t2 на участки длите.пь­
ностью t0 называется квантованием интервала t2, а пред­
ставление числа квантов, приходящихся на интервал f2
в той или иной системе счисления, называется кодиро­
ванием. Операция квантования и кодирования - это ос­
новные операции, которым подвергается аналоговая ве­
личина в любом ЦИП в процессе преобразования ее в
цифровую форму.
Цифровые вольтметры имеют низкий порог реаги­
рования обычно (10 или 1 мкВ), поэтому очень важно,
чтобы результат измерения мало зависел от помех и на­
водок во входной цепи ЦВ, уровень которых часто зна­
чительно больше порога реагирования ЦВ.
В ЦИП принято различать помехи нормального вида
и помехи обще1·0 вида. Рассмотрим действие этих по224
мех на примере ЦВ. На рис. 9.6 показана э1шивалент­
ная схема входной цепи ЦВ. Цепь содержит: источник
сигнала с параметрами е х и R; ЦВ с входным сопротив­
лением Rвх, сопротивлением Rиз и емкостью С изоляции
общей шины ЦВ от корпуса прибора; два проводни1<а
связи с сопротивлениями R 1 и R2; источник ЭДС помехи
нормального вида е п,н,n; источник ЭДС помехи обшеrо
ви да е п,о,в; сопротивление Ro между точками заземления
источника сигнала и корпуса ЦИП.
Помеха нормального вида возникает в основно�•r за
счет действия внешних переменных электромагнитных
полей, которые в контуре R 1 , ех, R, R2. Rвх создают ЭДС
eп,н,в=sdB/dt, где В - индукция внешнего электртлаr­
нитноrо поля, сцепленного с контуром, а s - площадь
контура. Для снижения интенсивности этой помехи пло­
щадь контура стремятся сдеJiать минимальной и под­
ключают источник ЭДС ех к ЦВ коаксиальным кабелем
или двумя свитыми проводниками.
Kopryyc ЦВ
Н'
II
,r iп,о,О
\._
Рис. 9.6. Эквивалентная. схема
входттой цепи ЦВ.
Рис. 9.7. Схема защиты от по­
мех общего вида путем э1,рани­
рования входной цепи ЦИП.
Помеха общего вида еп,о,в возникает из-за различия
потенциалов то чек заземления источнИI<а Э ДС ех и ЦИП.
Помеха может содержать постоя нную и переменную со­
ставляющие. Под действием еп ,о,в в схеме возникает тон
помехи iп,о,в (рис. 9.6). Этот ток на сопротивлении про·
вода R1 создает падение напряжения, которое действуе1
на ЦВ как помеха нормального вида. Таким образом,
помеха общего вида преобразуется в помеху нормально­
го вида и может вызвать сбои в работе ЦВ.
15-970
225
Защита от помех общего вида осуществляется путе�1
тщательно продуманного и хорошо испоJJненноrо монта­
жа ЦИП, обеспечивающего боJ1ьшое значение Rиэ и ма­
лое значение С, а также экранирования входной цепи
ЦВ, как показано на рис. 9.7. Применение экранов JJаиболее эффективный путь борьбы с помехой общего
вида. Сущность его заключается в с:1едующем: входная
цепь и АЦП ЦВ помещаются в коробку из алюминия.
Эта короб1<а является внутренним экраном ЦВ. Внут­
ренний экран тщательно изолируют от корпуса ЦВ. Об­
мен сигналами между элементами схемы внутри экрана
и вне его производится с помощью специальных малога­
баритных трансформаторов, что обеспечивает хорошую
изоляцию между э.11ементами схемы внутри и вне экрана.
Внутренний экран специальным третьим проводником,
сопротив.ТJение 1<отороrо обозначено Rз , подключается к
зазе�менной точке источню,а сигнала.
Ток помехи общего вида проте1<ает по контуру e0,o,n,
Rз, R нз2, параллельному конденсатору С2, R0 • ПоскоJ1ьку
полное сопротивление изоляции внутреннего экрана от
- корпуса ЦВ намного больше Rз +Ro, то практичес1ш вся
ЭДС еп,о,в будет прююжена к внутреннему эт<ран)1• В та­
ком случае разность потенциалов на R" 31 и С 1 от дей­
ствия еп ,о,в практически отсутствует, следовательно, нет
то1<а помехи в цепи с R 1 и действие еп,о,в на результат
измерения исключается.
Теоретически действие помехи еп,о,в в данной схеме
полностью не исклю•1ается, тат< как ток iп,о,в на Rз соз­
дает падение напряжения, которое вызовет то1< в R 1 и
появление помехи общего вида. Однако ослаб.1Jение по­
мехи достигается зна•штелыюе. Причем постоянная со­
ставлнющая сигнала помехи ослабляется гораздо силь­
нее, чем переменная состав.ТJяющая, так т-;ак па постоян­
ном токе влияние конденсаторов С 1 и С2 искточается,
следовательно, возрастает сопротивление изоляцни.
Борьба с помехами нормащ,но�-о вида промышленной
частоты 50 Гц в ЦВ уравновешивающего преобразования
ведется с помощью фильтров во входной цепи. В ка•1ест­
ве фильтров применяются двойные Т-образные мосты.
Однако при этом существенно сни.жается быстродейст­
вие ЦВ. В ЦВ на основе двухтактного интегрирования
эффективное подавление помехи нормального вида до­
стигается путе!\1 выбора длитею,ности первого такта ин­
тегрирования равным или кратным целому числу перио226
дов помехи. В соответствии с принципами действия та­
ких ЦВ результат измерения прямо пропорционален
среднему значению измеряемого напряжения на первом
та1<те интегрирования, а среднее значение синусоидаль­
ной помехи за период равно нулю. Но частота сетевого
1-1апряжения не строго постоянна и может изменяться в
пределах 50+0,5 Гц. В UB с постояшюй длительностью
интервала t1 (см. рис. 9.4) последнее обстоятельство на­
кладывает ограничение на степень подавления помехи.
В связи с этим в таких ЦВ таю1<е применяют вхол:ные
фильтры для большего подавления помех
Степень подавления помех К 11 пр инято ха рактеризо­
вать отношением значения помехи до ее подав.1Jения еп
*
к значению помехи nocJ1e ее подавления е п �1 выражать
это отношение в децибеJ1ах:
К и = 20 ]g � .
е�
Отечествепнг.я промышленность nыпускает ряд типов
ЦВ, ниже приводя,ся сr;едения о некоторыл из них.
На рис 9 8 показан внешний вид UB 1ипа Щl513,
уравновешивающего преобразонания и предназначенно­
го для измерення напряжения постоянного то1,а, а также
Рис 9 8 Цифровой оольтметр типа Щ!513
испол ьзования в качестве образцового при поверке
вол1,тметров с основной погрешностыо 0,1 и более.
Диапазон измерения 0-1000 В разбит на пять под­
диапазонов:
0,3 (0,29999), 3 (2,9999), 30 (29,999).
15*
227
300 (299,99) и 1000 (gg9,99) В. Время одного измерения
0,02 с.
Основная относительная погрешность на поддиапа­
зоне 3 В
t, = ± (0,01 + 0,005xJx),
на остальных поддиапазонах погрешность несколько
больше из-за влияния погрешностей делителей напря­
жения.
Порог реагирования 10 мкВ; переключение поддиапа­
зо110в ручное; определение полярности измеряемого на­
пряжения автоматическое; калибровка прибора по
встроенному нормал,,ному элементу производится через
каждый час работы прибора; входное сопротивление на
поддиапазонах 0,3 и 3 В (входной делитель напряжения
отключен) не менее 1000 МОм, на остальных поддиапа­
зонах (входной делитель в1,лючен) 10 МОм+О,1 %.
Рис 9 9.
Щ1413.
Интегрирующий
цифровоii
вольтметр
Входной фильтр на частоте 50+0,5 Гц обеспечивает
ослабление помех нормального вида на 40 и 60 дБ, при
этом время измерения соответственно возрастает до
2 и 5 с.
На рис. 9.9 показан ЦВ интегрирующего типа Щl413.
Вольтметр предназначен для точных измерений напря­
жения постоянного то·ка (в том числе с высоким уров­
нем помех) в диапазоне от О до 1000 В, который разбит
на пять поддиаnазонов: 0,1; 1; 10; 100; 1000 В. Входное
228
сопротиsление на поддиапазонах О, 1; J; 1 О В состав.rJЯет
1000 МОм, на поддиапазонах 100 и 1000 В - 10 МОм.
Порог реагирования 10 мкВ. Класс то•шости на поддиа­
пазопах О, 1; J; 1О В 0,05/0,02, на остальных поддиапазо­
нах 0,06/0,02. Подавление помех нормального вида: без
фильтра 60 дБ, с фильтром 100 дБ. Время одного изме­
рения без фильтра - не бo.JJee 0,3 с, с фильтром - не бо­
лее 2 с. ПодавJ1ение помек общего вида: по постоянно­
му то1<у 100 дБ, по переменному току без фильтра 80 дБ.
Переюпочение тюддиапазонов измерения ручное, опреде­
ление полярности измеряемого напряжения автоматиче­
ское, калибровка прибора по встроенному нормальному
элементу производится через каждые 8 ч работы.
Цифровые вольтметры-амперметры в щитовом исrюл­
нении типа Ф229 (рис. 9.1 О) предназначены для измере­
ния напряжения и тока в целях постояпноrо тока. Могут
Ф2f9-О,4/О,25
Рис. 9.10. Цифровоii ВОJlьтметр­
амперметр тнпа Ф229.
Рис. 9.11. Цифровой вольтметр
типа Ф219.
быть использованы для встраивания в измерительные
устройства и установ1ш в раз.JJичных областях науки и
промыш;1енноrо производства. Метод преобразования двухта1<тное интегрирование. Приборы имеют один пре­
дел измерения: по напряжению 0,2; 2; 20 и;ти 200 В, по
току 0,02; 0,2 или 2 мА. Класс точности 0,25/0,15. Выбор
полярности автоматический.
Цифровые вольтметры переменного тока, как прави­
ло, представJ1яют сочетание преобразователя перемен­
ного напряжения в постоянное с ЦВ постоянного тоиа.
В зависимости от вида преобразователя переменного на­
пряжения в постоянное та,ше ЦВ реагируют либо на дей­
ствующее значение измеряемого напряжения, либо на
его сред11евыпрямле11ное значение. В последнем случае
по аналогии с выпрямительными приборами они градуи­
руются в действующих значениях синусоидального на­
пряжения. Они предназначены для работы в цепях с си229
нусоидальной формой измеряемого напряжения. Пре­
образователи действующего значения измеряемых
напряжений в напряжение постоянного тока обычно реа­
лизуются на основе термоэлектричес1шх преобразовате­
лей. Общим недостатком ЦВ переменного тока, которые
в настоящее время выпускаются промышленностью, яв­
ляется их невысокая точность. Ниже приеодятся пара­
метры одной из таких моделей ЦВ.
Цифровой вольтметр переменного тока типа Ф219
(рис. 9.11) предназначен для измерения средневыпрям­
ленных значений переменных напряжений. Измеряемое
напряжение поступает на входное устройство, выпрям­
ляется и подается на АЦП двухтактного интегрированин.
Исполнение ЦВ щитовое, пределы измерения 0,2; 0,5; 2;
5; 20 или 50 В при KJiacce точности 0,4/0,25 и 500 и rrи
1000 В при классе точности 1,0/0,5. Время преобразова­
ния 120 мс.
9 з. циФРовыЕ мосты nосто.янноrо
И ПЕРЕМЕННОГО TOl(A
Цифровые мосты постоянного тока (омметры) предназначены
д11я измерения электрических сопротивлений nостоя,1Ному току.
Отечественная промышленность выпускает ряд типов цифровых ом­
метров д.�я измеренпя абсолютных значений сопрот,шле1JИЙ (оммет­
ры типа Щ34, Р380, Р382, Р383) относительного отклонения СО•
nротивлений от номина11ьнь,х значений ( омметры процентные типа
ЩЗО-04 1, Р337, Ф4205, Ф4206), а также кон1ролJ<еры доnусковые
типа Ф4210, предназначенные для контродя значений относительного
отклонения (допуска} сопротивления резистора от номинала.
Измерительная схема uифровь1х омметров для изиерения абсо­
лютlfых зиа•�ений сопротивлений показана на рнс. 9.12. Это четы­
рехплечий мост, в котором измеряемое сопротивление включено в
первое плечо моста. Второе и третье плечи являются шrечами отно•
Рис. 9.12. Измерите11ьная схема цафрового омметра.
230
шения, они содержат соответственно резисторы R21 , R22 , .. ,,Rlm 11
Rз 1 , R 32 , ..., R з1, Эти резисторы вкточаются и вы1,:1ючаются посредст­
вом l(ОНтактов электроме ханических реле или ру,mым переключате­
лем. Таким образом, выбирается поддиапазон измерения, соответ­
ствующий значению измеряемого сопроти1тения. Оrюнчате.чыю
мост приво;�ится к состоянию равновесия путем реrулировю1 сопро­
тивления четвертого плеча. Оно содержит ряд ветвей с проводимо­
стями 0 1 , 02... Gn, соотношение между которыми точно соответству­
ет определенным числам, так что, комбинируя положение ключей в
четвертом п.�ече моста, можно обеспечить тобое значение проводиn
мости от О до некоторого маl(симальноrо значения� Oj · Введе{ ко/=1
эффициент а1, харю<Теризующий состояние KJiю•;a с номером j в
'lетвертом пдече моста: а;=О, есJ1и 1и1юч разомкнут, а;=\, ес.1н
клю•1 замкнут. Тогда уравнение, связывающее проводимость четвер­
того пле•1а с состоянием J<лючеii в этом ПJ1ече, можно записа1ъ
в виде
n
01 = � aiOi ,
а условие равновесия моста
откуда
j=I
R1I R2 = Rз 04,
04 =R1IR 2 Rs•
Значение проводимости четвертого плеча однозначно определя­
ется состоянием r(J!ючей, т. е. значением коэфф�щиентов вида а;.
По значению этих коэффициентов е устройстве управления форми­
руется код N, отражающий зиаtJение измеряе�ю,·о сопротивления.
I<:од N поступает на цифровое отс•1етное устройство ИJ!И передается
во внешние устройства.
Оrшнчатет,ное уравновешивание цифрового моста всегда про•
изводится автоматичесr(И по командам со стороны управ.�яющеrо
устроiiства J/J/ и сравнивающего устройства СУ. КлюtJи в четвертом
плече моста выпош1яются обычно с использованием кремниевых
транзисторов, работающих в режиме отсечки, что соответствует
разомю1}1·ому состоянию клю•�а, или в режиме г.�убокоrо насыще­
НЮI, что соответствует замкнутому состоянию КJ1юч.а.
Цифровые мосты переменного тоl{а имеют измерительную cxe:wy
ТЭl(Же в ви.1е tJетырехплечеrо моста, одНЭl(О число реrупировок в
в ней бот,ше чем у цифрового омметра. Цифровые мосты пере�1е1-11юrо тока выпусr,аются дJiя измерения емrюсти, тангенса угла ди­
элеl{тричесr,их потерь, индуктивности, сопротивления и постоянноii
времени, для измерения процентных откJюнений емкости от номи­
нального значения, а также дJ1я допускоеоrо контроля емкости, ин­
дуктивности и танr�аса угла диэлектри•rеских потерь в установлен­
ных пределах при ра�браковке изделий в процессе их производства.
На рис. 9. I 3 лоr,азан цифровой омметр типа Щ34, предназна­
ченный для измерения сопротивJ1ения nостоянноыу току в диапазо­
не I0-3-109 Ом. Весь диапазон разбит на восемь подлиалаэонов.
Границы основной погрешности измерения зависят от номера под•
диапазона и лежат в предедах от ±(О,02+0,005хх/х) на по,цдиа231
Рис. 9.13. Цифровой омметр типа Щ34.
пазонах l03 -105 Ом до ±(1,0+0,1 x,<fx) на поддnапазонах
107-109 Ом Выбор и nере1<лючение поддиапазонов автоматические.
Время измерения I с.
9.4. 1(01\\БИНИРОВАННЫЕ ЦИФРОВЫЕ ПРИБОРЫ
Комбинированные цифровые приборы позволяют из­
мерять ряд электрических величин, например напряже­
ний постоянного и переменного тока, сопротивления по­
стоянному току, емкости, индуктивности в их различном
сочетании. Как правиJю, основой комбинированного при­
бора является ЦВ постоянного тока интегрирующего
типа; ироме него прибор содержит ряд преобразователей
различных электрических величин в напряжение посто­
янного тока. Так, при измерении токов в качестве пре­
образователей применяются шунты, при измерении на­
пряжений переменного тока - ПСЗ или ПДЗ на основе
-rермоэлектрических преобразоватеJ1ей.
На рис. 9.14, а и 6 показаны упрощенная схема ПСЗ
и диаграмма напряжений в схеме, поясняющая работу
Uox г""'io::::-::::,F""',,;:=f'-i-t
а)
Рис. 9.14. Преобразователь переменного напряжения.
а - улрощс1111ая схема, б - диаграммы uалряж�нш!.
232
t
ПСЗ. Преобразователь содержит операционный усили­
тель ОУ с бол�,шим коэффициентом усиления, охвачен­
ный отрицательной обратной связью по току через
сопротивление R. o,c• При нормальной работе схемы раз­
ность потенциалов между входами операционного уси­
лителя очень мала. Поэтому nрактичесJ<И можно считать,
что напряжение обратной связи U0 ,c равно Uвх- Однако
напряжение U 1 на выходе диода \,'D2 будет иметь не
одинаковое значение в различные полуnериоды Ивх­
В случае положительной полуволны диод VDl закрыт,
а VD2 открыт и U 1 будет равно:
_в_)·
U1 = Ио.с (Ro,c + R) = U0 ,c (1 +-R-) � Ивх (t +
Ro.c
Ro,c
Ro,c
случае
отрицательной
полувоJшы
диод
\,'D
1
открыт,
В
а VD2 закрыт, в этот nолупериод V 1 =Vo,c� Ивх- Зна­
чение сопротивления R. выбирается в несколько раз
больш им R. o ,c, поэтому амплитуда положительной полу­
волны U 1 в нескою,ко раз больше амплитуды отрица­
тельной nолуволны.
Фильтр на выходе ПСЗ не пропускает переменную
составляющую напряжения U 1 , и поэтому на выход схе­
мы поступает только его постоянная составлнющая, ко­
торая пропорциональна средне­
выпрямленному значению Ивх Преобразователь действую­
щего значения входного напряРис. 9.15. ПреобразоватеJ1Ь сопроти;;
ления в напряжен ие.
жения на основе термоэлектрического преобразователя
имеет более сложную схему и применяется в комбини­
рованных приборах высокой точности.
Преобразование сопротивлений в напряжение обыч­
но также производится с помощь ю операционного уси­
лителя. Одна из возможных схем такого преобразовате­
ля показана на рис. 9.15. Измеряемое сопротивление Rx
включено в цепь ООС по напряжению операционного
усилителя ОУ с больш им коэффициентом усиления. Ко
входу усилителя через резистор Ro подключен источнин
постоянного напряжения U0• В нормальном режиме ра­
боты разность потенциалов на входе усилителя близка
к нулю, иначе OJ! перейдет в режим отсеч1ш или насы233
щения. Это дает основание считать, что ток l=V0/R 0•
Входной ток ОУ пренебрежимо мал, с.11едовательно, ток
/ будет протекать через Rx и выходное напряжение мож­
но выразить так:
Ивых = fRx = VoR·1/Ro·
ECJIИ предположить, что Uo и Ro - величины постоян­
ные и стабильные, то преобразователь является линей­
ным преобразователем сопротивления в напряжение.
95. ИЗМЕРИТЕЛИ ЧАСТОТЫ И ИНТЕРВАЛОВ ВРЕМЕНИ
Структурная схема цифрового частотомера показана
на рис. 9.16,а. Напряжение измеряемой частоты fx про­
извольной формы подается на вход усилителя-ограничи­
теля УО, в котором оно преобразуется в 11рямоугОJ1ьньrе
имnуJI.ьсы напряжения той же •1астоты fx и по;�ается на
электронный нлюч ЭК. Ключ ЭК в нормальном состоянии
N
fx
t
Рис. 9.16. Цифровой частотомер.
а- структурная схема; б- временная д11гграмма 11мпупьсов.
разомкнут, но при подаче импульса напряжения дли­
тельностью Т0 от датчика интервала времени ДИВ ключ
ЭК замыкается и импульсы с выхода УО поступают на
вход счетч1ша импульсов CttИ, в котором они подсчиты­
ваются. По окончании импульса То ключ ЭК размыка­
ется, на выходных шинах CttИ формируется код N, соот­
ветствующий ко.пичеству импульсов напряжения, прошед­
ших на счетчик СчИ. Этот код подается на цифровое от­
счетное устройство ЦОУ, где отображается в виде цифр,
а также поступает на выход частотомера для передачи
во внешние устройства.
На рис. 9.16, 6 показана временная ,1.награмма им­
пуJiьсов, действующих в схеме: на выходе УО (fx ), на
выходе ДИВ (То) и на входе СчИ.
234
Обозначим через tx период импульсов частоты fx, тог­
да количество импульсов N, прошедших на счетчик СчИ
за время То, будет равно:
N=To'tx = TofxПpи постоянном и стабильном значении Т0 код N пря­
мо пропорционален fx. Точность измерения частоты fx за­
висит от точности задания интервала Т0• Современные
цифровые частотомеры в качестве датчика интерваJiа
времени содержат высокочастотный генератор, снабжен­
ный деJiителем частоты, на выходе которого и получают
импульсы с периодом То. Стабильность частоты кварце­
вых генераторов очень высока - изменение частоты пос­
ле ее подстройки не превышает I o-s % за l О дней, поэто­
му цифровые частотомеры позволяют измерять частоту и
связанные с ней величины с очень высокой то1шостью, а
отсчетные устроikтва частотомеров содержат до семи
декад. Однако изменение частоты кварцевого генерато­
ра - не единственный источник погрешности цифрового
частотомера. Другой составляющей погрешности являет­
ся дискретность преобразования интервала времени Т0 в
код N. Эта погрешность проявляется в ТО;\1, что при одних
и тех же значениях Т0 и N значение fх может быть раз­
ным и находиться в некоторых пределах: на рис. 9.17, а
r�
_c=J_
...
О�
1-Z
а)
О t 2
б)
То
N
О}
Рис. 9.17. Схема проявJ1ения погрешност11 дисJ<ретности при изме­
рении частоты.
а - логрешпост1) д11сf{ретвости отсутствует; б - поrрешнос1ъ днсf\ретиостц раu­
на +t х• в - погреш11ость д11скрет11ости равна -t х,
по1<азан случай, ноrда на 10 укладывается точно N им­
пул1,сов с периодом fx1 ; на рис. 9.17, 6 на интервале То
укладывается такое же количество импульсов N, но пе­
риод fx2 >tx1 ; на рис. 9.17, в на интерваJ1е То также укла­
дывается N импульсов, но здесь fxз<fx ,. Погрешность
дис1<ретности не превышает + 1 отсчета по цифровому от­
с•1етному устройству, а ее относительное знач.ение - нс
235
60J1ee t.,/To=l/ (Tofx). Таким образом, границы относи­
тсJ1ьной погрешности частотомера в процентах определя­
ются выражением
± (бто + 1/Tofx)• 100,
где бтu - относительная погрешность задания интерва­
ла То.
Схема рис. 9.16, а принципиально пригодна для изме­
рения частоты во всем диапазоне: от нуля до максималь­
ного значения. Однако измерение низких частот по этой
схеме требует длительного времени измерения. Покаже�
это на следующем примере: пусть требуется точно изме­
рить значение частоты fx � 100 Гц частотомером с семн­
де1<адным отсчетным устройством. При точном измерении
предполагается, что первая значащая цифра результата
измерения должна быть в старшей декаде отсчетного
устройства. В нашем примере для выполнения этого ус­
ловия на вход частотомера надо пропустить 106 импуль­
сов и затратить на это время T0 =106/fx =104 с�З ч. Вре­
мя измерения можно сократить без потери точности, ec­
JJИ перейти к измерению не частоты, а
периода. Схема
периодомера по:шзана па
рис. 9.18. Она содержит
генератор высокой часто­
ты ГВЧ, электронный
ключ ЭК, два сче.т•rика
импульсов СчИ и СчИJ,
.....
Рис. 9.18. Структурная схема
щ,фрового периодомера.
цифровое отсчетное устройство ЦОУ, усилптель-огранн­
читеJ1ь УО, а таюке переключатель SA.
Напряжение произвольной формы, период которого
Тх измеряется, преобразуется усилителем-ограничителем
УО в прямоугольные Иl\шульсы с периодом Тх. EcJIИ пе­
реключатель SA находится в позиции 1, то импульс с вы­
хода УО замкнет ключ ЭК на время, равное Тх, при
этом от ГВЧ на СчИ пройдет N импульсов с периодом to.
Значение Tx =Nt0 может 01,азаться недостаточным для
того, чтобы первая значащая цифра отсчетноrо устрой­
ства ЦОУ появилась в старшем разряде. Время замкну•
того состояния ключа ЭК можно увеличить, поставив пе­
реключатель SA в позицию 2. В этом случае импульс уп236
равлсния ЭК формируется счетчиком С•tИ и равен пТ,,,,
где п - коэффициент пересчета счетчииа СчИ.
Струнтурная схема 11астотомера позволяет без сущест­
венных передело1< нутем простых переключений исполь­
зовать его:
1) для измерения длительности импульсов и интер­
валов временп; в этом случае измеряемая величина по­
дастся на БХО/l усилителя-ограничителя УО в схеме
рис. 9 18, а пере1<лючатель переводится в позицию /;
2) для нзмерення отношения частот, в этом сJ1учае
(см. рис. 9 16) наnрюь.ение с частотой f1 подается на
вход УО, а напр яжение с частотой f2<f1 используется
для управJ1ения ключом ЭК (датчик интерваJ1а времени
ДИВ отключается); код N=fi!f2;
3) в качестве генератора кратных эталонных частот,
которые создаются 1<Варцевым генератора� и деJштелем
частоты;
4) в 1<ачестве делителя частоты путем исnо:1ьзования
счетчиков импульсов.
Рис 9 19 Частото111ер-хронометр типа Ф599.
На рис. 9 19 показан частотомер-хронометр типа
Ф599, который нредназначен для измерения частоты и
периодов эле1<трических колебаний, дJштельности им­
пульсов и интерваJJов времени, отношения частот и 1юли­
чества импульсов, а также может быть использован в ка­
•rестве генератора кратных эталонных частот и делителя
частоты. Прибор имеет диапазоны измерения: частот
0,1 Гц-1,5 МГц; периодов эJJектрических 1юлебаний, ко237
торые соответствуют частотам 0,1 Гц-lМГц; интерва­
лов времени от 10 мкс до 105 с; длительностей импульсов
от 10 мкс до 10 с; количества импульсов до 9 999 999; от­
ношения частот от 1: 1 до 5· 105 : 1 на частотах 0,1 Гц 1,5 МГц.
Время То измерения частоты 0,01; 0,1; l; 10; 100 с.
Количество периодов п при измерении усредненного зна­
чения периодов и отношения частот l; 10; 102; 103; 101.
Метки времени для заполнения измеряемых интервалов
(периода, времени, длительности импульсов) 1; 10; 102;
103; 104 мкс. Диапазон входных напряжений 0,1-100 В.
Выходные частоты опорного генератора 106 ; 105; 5- 104 ;
2,5-1�; 104 ; 103; 10 2 ; 10; 1; 10-1; 10-2 Гц. Прибор имеет
ру<шое, автоматическое и дистанционное управление.
96. ЛАБОРАТОРНАЯ РАБОТА № 9.
ИЗУЧЕНИЕ И ПРИМЕНЕНИЕ ЦИФРОВОГО ВОЛЬТМЕТРА
В данной р.�боте изучается структурная схема и применение
цифрового вольтметра в качестве образцового прибора дли поверl(И
показывающего аналогового вольтметра.
Задание
1, Ознакомиться с приборами, предназначенными для выполне­
ния работы, и уrшзаниями по их эксплуатации. Внести в протокол
паспортные данные приборов.
2. Проверить возможность применения имеющейся аппаратуры
для решения поставленной из:11ерительной задачи.
3. Зарисовать структурную схему цифрового вольтметра и ус­
воить состав и назна,1ение основных функциональных узлов входной цепи, аналого-цифрового преобразоватедя.
4. Собрать схему: соединить входные заЖИ"\,!Ы поверяемого и
цифрового вольтметров параллельно и подсое;щнить их к зажимам
источника реrуJшруемого напряжения. Показать собранную схему
преподавателю ,,:дя проверки.
5. Вкдючи1ъ схему под напряжение и произв�сти поверку вольт­
метра на всех числовых отметках шкалы.
6. Резудьтаты набтоден�rй и расчетов заllисать в таблицу, ана­
логичную таблице в работе No 5.
7. Составить отчет по требуемой форме.
ГЛАВА ДЕСЯТАЯ
ИЗМЕРЕНИЕ ТОКОВ И НАПРЯЖЕНИП
10 1. l\\ЕТОДИЧЕСl(ИЕ ПОГРЕШНОСТИ
С включением амперметра или вольтм:етра в электри­
ческую цепь изменяется измеряемая величина. Это вы­
звано тем, что сопротивление амперметра отлично от ну­
ля, а сопротивление вольтметра не равно бесконечности.
Погрешность, возюшающая в результате вкюочения из­
мерительных приборов в исследуемую цепь и обусловлен­
ная потребляемой ими мощностью, называется методи­
ческой погрешностью.
Определим методичес1<ую погрешность, возникаю­
щую при включении амперметра в электрическую цепь.
Пусть требуется измерить ток в цепи, имеющей сопро­
тивление R, к которой приложено напряжение И. Т,ж
lx в этой цели будет равен:
IX = UIR..
После включения амперметра, имеющего сопротивле­
ние Rл, ток в цепи изменится и станет равным:
/ = U!(R + RA),
Амперметр измеряет именно это значение тока.
Методическая погрешность, вызванная вкJ1ючением
амперметра, составит:
бА= 1-lx =RA/R
l+RA/R
fx
то
Обычно Rл4:.R. поэтому бA�-RA/R. Так как
RA IR = I2RA !l2R = рAIP,
бА�-Рл!Р,
где Рл - мощность, п отребляемая амперметром; Р мощность, потребляемая исследуемой цепью.
Рассмотрим слу•1ай, когда надо измерить падение на­
пряжения Их на некотором сопротивлении R.:
Ux = IR = ERl(R + R.0),
где Е - ЭДС источника тока; R o - внутреннее солротив­
дение источника то1,а.
После включения вольтметра, имеющего собственное
сопротивление Rv , параллельно сопротив,1ению R наnря•
жение U, измеl'енное вольтметром, составит:
ERR v
ERR v f(R +R v ) V=
R0 -!-RRv f(R+ R v )
.Методичес1(ая погрешность измерения бv в этом слу­
чае будет равна:
RIR v
U-Ux
бv =
=_
I т R!R v +RIR0
Ux
Учитывая, что
u2 /Rv
Pv
R
--=---=-2/
Р
U
Rv
R
и обычно R,,>>R, получаем:
Pv lP
бv � - ---,......,..
.....,,....--=-1+
R/R0
'
где Pv - мощность, потребляемая воJ1ьтметром; Р мощность, потребляемая исследуемым резистором R.
Следовательно, как nри измерении тока, так и nри из­
мерении напряжения необходимо выбирать такие при­
боры, у которых потребляемая мощность значительно
меньше мощности, рассеиваемой в исследуемой цепи.
Этим и объясняется стремление иметь в амперметрах
возможно :меньшее, а в вольтметрах возможно боJ1ьшее
сопротивление.
102. МЕТОДЫ ИЗМЕРЕНИЯ ПОСТОЯННЫХ ТОКОВ
И НАПРЯЖЕНИИ
Измерение малых токов и напряжений. Для опреде­
ления малых постоянных токов можно использовать как
прямые, так и 1юсвенные измерения. В первом случае ток
можно измерять зерка.ТJьными гальванометрами и стре­
лочными магнитоэлектрическими приборами. Наимень­
ший ток, который можно измерить зеркальным гальвано­
метром, равен приблизительно 10-11 А, а стреJiо•шы:м маг­
нитоэлектрическим прибором - 10-в А. Чтобы повысить
чувствительность, измеряемый ток nо;lают на вход уси­
лнтеля постоянного тока, к выходу которого присоединя­
ют стрелочный магнитоэлектрический прибор. Для этого
240
обычно используют фотогальванометрисrесrше усилители
или полупровод никовые усилители с преобразованием
постоянного то1<а в переменный. С помощью усилителей
можно измерять токи до 10- 10 А.
Еще меньшие токи измеряют 1<0свенно - неизвест­
ный то1< определяют по падению напряжения на высо,ю­
омном резисторе или по заряду, накопленному конденса­
тором. В качестве приборов используются баЛJIИстичес1ше гальванометры (минимально измеряемый ток
10-12 А) и электрометры (ми­
нималыю измеряемый ток
10-17 А, при этом через попе­
речное сечение проводника
проходит всего 62 электрона в
секунду).
Электрометрами называют
4
приборы высокой чувствительности по напряжению с очень
большим входным сопротивле­
нием (порядка 1010 --10 15 Ом).
Механизм электрометра пред->
Рис. 10.1. Схема устроиства квадрант1юrо эле1<трометра.
ставляет собой разновидность механизма электростати­
ческого прибора, который имеет один подвижный и не­
сколько неподвижных эле1<тродов, находящихся под раз­
ными потенциалами.
Шир01<0е распространение получили квадрантные
электрометры (рис. 10.1), у 1юторых подвижная часть 1
с зеркаJJом 2 за�<реплена на подвесе 3 и расположена
внутри четырех неподвижных электродов 4 (квадрантов).
На рис. 10.1 приведена одна из схем соединения эле1про­
д.ов, обладающая наибольшей чувствительностью. Изме­
ряемое напряжение Их включается между подвижной
частью и общей точкой, а на квадранты от вспомогатель­
ных источников подаются постоянные напряжения И,
значения 1юторых гавны, но противоположны по знаку.
Оп<лонение подвижной части в этом случае равно:
2 dC
а=-ИU."''
W
16-970
da
00
где С- емкость между подвижным электродом и двумя
соединенными между собой квадрантами: W - удель­
ный противодействующий момент, зависящий от конст­
ру1щии подвеса.
Отклонение подвижной части, а следовательно, и чув­
ствите.ньность электрометра проnорцио11аJ1ьны вспомога­
тельному напряжению V, значение коrорого обычно вы­
бирают в пределах от 100 до 200 В.
Чувствительность квадрантных электрометров (при
вспомогательном напряжении 200 В) достигает 104 мм/В.
lx
:••�!и, ф)
а)
lx
Со
о
1
_1_
-тСа1
б)
Рис. 10 2. Схемы измерения очень малых токов.
а - электрометром rю падению напряжен.ия. на резисторе; б - элсктро!\1етро'i
110 з�ряду накопленному коиде11сатоJЮм; о - баллисти•1еским rальваиометро"
по заряду, иа1шnлениому 1шидспсатор о111.
На рис. 10.2, а приведена схема измерения то1ш с по­
мощью электрометра Э, измеряющего падение напряже­
ния U0 =lxRo на высокоомном резпсторе R0• Ключ пред­
назначен для снятия заряда с конденсатора, образован­
ного подвижным и неподвижными эле1<тродами электро­
метра. Препятствием к измерению очень малых то1юв яв­
ляется нестабильность нулевого положения элеr<тромет­
ра - медленное одностороннее смещение указателя от­
счетного устройства и хаотичес1ше 1юлебания указателя
около его среднего положения - вследствие флюI<туа­
ционных помех, обусловленных, например, тепловыми
шумами в резисторах.
Измерение постоянного тока по заряду, накопленно­
му конденсатором, можно осуществить по схемам
рис. 10.2, 6 и в.
В схеме рис. 10.2, 6 после размыкания ключа осу­
ществляется нююпление заряда на емкости С0• За вре­
мя t, отсчитываемое по сен:ундомеру, конденсатор полу­
чит заряд Q=lxt, при этом электрометр Э nо1шжет на­
пряжение на конденсаторе Со, шунтированном емкостью
Сэ эле1прометра и монтажа, равное
V0 = Ql(C0 + С8)
242
= l,,J!(C0 + С.,).
0бbl1IRO Со � Сэ, тогда
/х � U0C0 !t.
При измерении по схеме рис. 10.2, в предварительно
.., .. зряженный 1юнденсатор Со подключают на время t к
цепи /х• За время t конденсатор получит заряд Q=/xf.
Затем конденсатор переключают в цепь баллистического
га.тн,ванометра, замечают баллистический отброс a1ni
и определяют /х по формуле
(,: = Q!t = CQa1mlt,
где CQ - цена деления (баллистическая постоянная)
(см.§ 5.4).
Более точный, но менее чувствительный способ изме­
рения малых токов заключается в измерении падения на­
пряжения на образцовом резисторе при помощи nотен­
ц�юметра постоянного тока. Таким способом можно из­
мерять токи начиная от 10-8 А.
Для точного измерения малых то1юв можно исполь­
зовать цифровые пикоамnерметры, принцип действия ко­
торых сводится к измерению падения напряжения на вы­
со1юомном резисторе цифровым милливольтметром. Эти
приборы позволяют измерять токи от 10-8 А с погреш­
ностыо, не превышающей 0,5%.
Для измерения малых постоянных напряжений мож­
но использовать магнитоэлектрические гальванометры,
потенциометры постоянного тока, цифровые микровольт­
метры и стрелочные магнитоэлектрические приборы.
Последние применяются 1,ак самостоятельно, так и в со­
четании с электронными и фотогальванометрическими
усилителями.
С помощью магнитоэлектрических гальванометров
можно измерять напряжения порядка 10-7-10-8 В.
Потенциометры постоянного тока существенно пре­
восходят гальванометры по точности и входному сопро­
тивлению, но уступают им no чувствительности: они поз­
воляют измерять напряжение, начиная от 10-5-10-6 В.
Цифровые м1шровольтметры по точности и чувстви­
тельности практически не уступают потенциометрам по­
стоянного тока. Они позволяют измерять напряжение на­
чиная от 10 мкВ с погрешностью 0,3-0,5%.
Для измерения напряжений порядка 10- 6-10-7 В и
бo.riee можно использовать нановольтметры, состоящие
из фотогальванометричес1,ого усилителя, 1< выходу кота16*
243
рого присоединен измерительный механизм магнито­
электричес1юй системы. Классы точности этих приборов
1,0-1,5. Ми1<ровол1,тметры, состоящие из эле1<тронного
усилителя с подключенным к его выходу прибором маг­
нитоэлектричес1<ой системы, имеют приблизительно ана­
логичные характеристи1ш по точности, но обладают бо­
лее высо1шм входным сопротивлением и неско.'!Ько мень­
шей чувствительностью.
Милливольтметры магнитоэлектричес1{0Й системы ис­
пользуются дJIЯ измерения напряжений от 10-4 В и от­
личаются простотой и удобством в э1<сплуатации. Классы
точности милливольтметров не лучше 0,2; 0,5.
Измерение средних токов и напряжений. К средним
токам и напряжениям условно можно отнести то1ш в диа­
пазоне от 10 мА до 50-100 А и напряжения от 10 мВ до
600 В. ДJш измерения средних постоянных токов можно
использовать прямые и косвенные измерения. Для изме­
рения напряжений используют только прямые измерения.
При прямых измерениях ток и напряжение можно из­
мерять приборами магнитоэле1<трической, элеI<тромаг­
нитной, эле1продинамической и ферродинамичес1юй сис­
тем, а также электронными и цифровыми приборами,
Напряжение можно измерять приборами элен:тростатиче­
ской системы и потенциометрами постоянного тока.
Постоянные токи от I мкА до 6 кА и напряжения от
1 мВ до 1,5 кВ обычно измеряют приборами магнито­
элеI<трической системы. В МИiфО- и мил.тшамперметрах
этой системы весь ток протекает через рамку измери­
тельного механизма. Этот ток, как правило, не превыша­
ет 20-50 мА. Для расширения пределов измерения из­
мерительного механизма по току используют шунты, а.
по напряжению - добавочные резисторы.
Амперметры и вольтметры магнитоэлектричес1{0й си­
стемы успешно сочетают высокую точность с малым по­
треблением мощности II имеют равномерную шкалу.
Наиболее точные приборы маrнитоэJ1ектрической систе­
мы, предназначеннь1е для измерения средних токов и на­
пряжений, имеют классы точности О, 1; 0,2.
Приборы электродинамической системы предназна­
чены для измерения токов от 10 мА до 100 А и напряже­
ний от 100 мВ до 600 В. По точности они эюзивалентны
приборам магнитоэлектричес1<0й системы, но потребляют
значительно большую мощность и имеют неравномерную
шкалу.
Приборы ферродинамической системы применяются
для измерения постоянных то1юв и напряжений очень
редко из-за низ1юй точности и большой потребляемой
мощности.
Приборы элсrпромагнитной системы используются
для измерения токов от 10 мА до 200 А и напряжений
от l В до 75 В. Наиболее точные приборы этой системы
имеют классы точности 0,2; 0,5. Их главное достоинст­
во - низкая стоимость.
Для измерения постоянных напряжений в диапазоне
от нескольких вольт до нескоJ1ьких сотен юiловолът при­
меняются таюке электростатические вольтметры. Их
преимущество заключается в ничтожном потреблении
мощности от объе1{та измерения. Наиболее точные при­
боры этой системы имеют класс точности 0,05. Однако
точные элет{тростатичес1шс приборы очень сложны и до­
роги и выпускаются в небольшом l{ОЛичестве. Подавляю­
щее же большинство вольтметров этой системы имеет
I{Jiaccы точности 0,5; 1,0 и 1,5.
При напряжениях, не превышающих 600 В, вместо
приборов электростатической системы можно применять
вольтметры электронной системы. Они также потреб.пя­
ют ничтожную мощность. Класс точности электронных
вольтметров постоянного то1{а невысокий: лучшие из них
имеют классы точности 0,5; 1,0.
В тех СJ1учаях, когда необходимо измерить наnря­
ж�ние иди ток с высо,юй точностью, используют потен­
циометры постоянного тока, цифровые вольтметры и ам­
перметры. К.пассы точности наиболее точных потенцио­
метров 0,001; 0,002, цифровых вольтметров 0,002; 0,005,
цифровых амперметров 0,02. Цпфровые вольтметры из­
меряют напряжение до нескоJ1ьrшх тысяч вольт, а циф­
ровые амперметры - TOI{ до нес1юлышх ампер. Потен­
циометрами постоянно,о тока при исnо.1JЬзовании дели­
телей напряжения можно измерять напряжение до I ООО В.
Измерение тока при помощи потенциометра проводят
1юсвенным путем - искомый ток определяют по падению
напряжения на образцовом резисторе. Погрешность из­
мерения в этом случае возрастает за счет погрешностей
образцового резистора. Преимуществом потенциометров
и цифровых приборов является малое потребление мощ­
ности, особенно при измерении напряжений.
Ток можно также найти, измерив падение напряжения
на образцовом резисторе при помощи во.11ьтметров эдект245
ростатической ИJJИ электронной систем. Однако для сред­
них то1юв этот способ распространения не получил, так
ка1{ измерение с помощью магнитоэлектрических ампер­
метров проще, удобнее и, J{ак правило, точt1ее
Измерение больших токов и напряжений. lllунтиро­
вание магнитоэлектричес!\ИХ приборов дает возможность
измерять постоянные токи до несколышх тысяч ампер.
Отдельные шунты на токи свыше I О ю\ не изготов.r�яются
вследствие их боJJьших размеров и боJJьшой стоимости.
Поэтому ДJJЯ измерения больших токов часто используют
нес1юлыю шунтов, соединенных паралле.r�ьно (рис. 10.3).
Ro
lrq
Rtf
R
R
R:и
R12
R22
Rjz
�
--,,...
,,,�
Рис. 1 О 3. Измерение больших токов с использованием параллельного
соединения шунтов.
Несколько одинаковых шунтов подключают в разрыв
шины, а проводники от потенциальных зажим.св всех
шунтов подводят к одному и тому же прибору. При ра­
венстве сопротивлений R шунтов и сопротивлений Ro по­
тенциальных проводников наличие переходных сопрот11в­
J1ений в местах присоединения шунтов 1{ шинам R l! , R 12,
R21, R 22 , Rз1 и Rз2 не отражается на показаниях прибора,
а ведет лишь 1{ неравномерному распределению токов
между шунтами. Ток / у, протекающий через прибор, оп­
ределяется только сопротивлениями шунтов, потенциаль­
ных проводников и прибора, т. е. точно так же, KaI{ и при
измерении то1{а с помощью одного шунта. Практически
используют несколько однотипны х шунтов.
Но этот способ не дает возможности отделить цепь
прибора от цепи измеряемого тока, что не позвОJшет при­
менять его в цепях высокого напряжения, где требуется
заземлять цепь прибора для защиты обслуживающего
246
персонала. При измерении ТОI{а в цепях высокого напря­
жения рекомендуется использовать трансформатор по­
стоянного тока, описанный в § 3.5.
Для измерения постояшюrо напряжения до 6 кВ ча­
ще всего применяют магнитоэлектрические вольтметры с
добавочными резисторами.
При больших напряжениях использование добавоч­
ных резисторов сопряжено с бОJ1ьшими трудностями, выз­
ванными их rромозд1{остью и значите.пьной потребJ1яе­
мой ими мощностью. В этих случаях применяют электро­
статичес1ше вольтметры, позволяющие измерять напря­
жение до 300 кВ (вольтметр типа CIOI), или включают
обычные вольтметры через измерительные трансформато­
ры постоянного напряжения.
Запись постоянных токов и напряжений производится
при помощи автоматичес1шх потенциометров или само­
пищущих приборов магнитоэлектричес.1юй системы.
10.3. МЕТОДЫ ИЗМЕРЕНИЯ ПЕРЕМЕННЫХ ТОКОВ
И НАПРЯЖЕНИИ ПРОМЫШЛЕННОИ 1IАСТОТЫ
Для оценки переменных токов и напряжений исполь­
зуют понятия действующего (средпеквадратическоrо)
значения, амшштудного (максимального) значения и
средневыпрямленноrо значения.
Действующее, амплитудное и средневыпрямJ1енное
значения связаны между собой через коэффициент формы
I{ривой k,t,=U/Ucp (или J//cp) и коэффициент амплитуды
k a =И rn/U (или lrn/1). Значения этих I{Оэффициентов за­
висят от формы кривой напряжения (то1{а). Так, для си­
нусоиды k Ф =1, 11 и ka = V2= 1, 41,поэтому, измерив одно
из трех указанных выше значений измеряемой величины,
можно лешо определить остальные. Например, если
вольтметром измерено действующее значение синусои­
дального напряже!-IИЯ И= 11О В, то это значит, что Иш =
= 1,41 • 110� 155 В, а Иср = 110/1,11 �99 В.
При несинусоидальном напряжении (токе) чем более
«тупой» будет кривая измеряемой величины, т. е. чем
ближе она будет к прямоугольной форме, тем ближе к
единице будут коэффициенты kФ и k a . Для кривой прямо­
угольной формы kФ = k a = 1. Наоборот, чем «острее» и
«уже» будет кривая измеряемой величины, тем больше
будут ее коэффициенты kФ и k,.
Приборы электродинамической, ферродинамичес1юй,
электромагнитной, электростатической и термоэле�{три247
ческой систем реагируют на действующее значение изме­
ряемой величины. Приборы выпрямительной системы
реагируют на средневыпрямленное значение измеряемой
величины. Приборы электронной системы, 1<ак зналоrо­
вые, тю< и цифровые, в зависимости от типа измеритель­
ного преобразователя переменного напряжения в посто­
янное могут реагировать на действующее, средневыпрям­
ленное или амплитудное значение измеряемой величины.
Вольтметры и амперметры всех систем обычно гра­
дуируют в действующих значениях при синусоидальной
форме кривой то1<а. При несинусоидальной форме кривой
у приборов, реагирующих на средневыпрямленное или
амплитудное значение тока (напряжения), будет возни­
кать дополнительная погрешность, так как коэффициен­
ты kФ и ka при несинусоидальной форме 1<ривой отлича­
ются от соответствующих значений дJIЯ синусоиды.
Для измерения переменных то1юв до 10 мкА служат
элеI<тронные микроамперметры. Они состоят из усили­
теля переменного то1<а и миллиамперметра выпрямитель­
ной или термоэлектричес1юй системы. Иногда вместо
усилителя переменного тока используется электронный
преобразователь переменного тока в переменное напря­
жение, представляющий собой усилитель, охваченный
глубокой отрицательной обратной связью по напряже­
нию; переменное напряжение измеряют эле1<тростатиче­
с 1шм измерительным механизмом. Электронные микроам­
перметры рассчитаны на работу в диапазоне звуковых
частот и имеют 1<Лассы точности 1,5-2,5.
Для измерения переменных токов свыше 10 мкА слу­
жат цифровые микроамперметры, которые в диапазоне
частот до 5 кГц имеют погрешность не более 0,5%. Токи
свыше 100 мкА можно измерять миллиамперметрами вы­
прямптельной системы, а также миллиамперметрами
термоэлектрической системы с промежуточным усили­
телем постоянного тока, под1<люченным к выходу термо­
электрического преобразователя. Приборы этил систем
имеют 1<лассы точности 1,0-1,5.
Ферродинамичес1ше миллиамперr.1етры позволяют из­
мерять токи порядка 1 мА и более. К.ласе точности фер­
родинамических миллиамперметров 0,5
Чтобы повысить чувствительность и.rrи точность при
измерении малых переменных токов промышленной час­
тоты, при помощи вольтметра опредеJшют падение на­
пряжения, создаваемое током на образцовом резисторе.
248
Если при этом воспользоваться электронным вольтмет­
ром, то та�шм способом можно измерять токи до 10- 11 А
с погрешностью несколько процентов.
Для точного измерения напряжения можно применять
потенциометры переменного тока или цифровые вольт­
метры переменного тока, которые распространены более
широ1<0, чем цифровые миллиамперметры.
Самыми чувствительными приборами, предназначен­
ными для измерения малых переменных напряжений, яв­
ляются аналоговые электронные милливольтметры, в 1ю­
торых измеряемое напряжение предварительно уси,rшва­
ется, а затем измеряется выпрямительным прибором.
Эти приборы позволяют измерять напряжение порядка
нескольких микровольт с погрешностью около 4-6 % .
Существенно более высокую точность, но меньшую
чувствите.1JЬность имеют потенциометры переменного то­
ка и цифровые вольтметры. Потенциометрами перемен­
ного тока измеряют напряжения от 1,0 мВ с погрешностью
nоряд1{а десятых долей процента. Цифровые электрон­
ные милливольтметры позволяют измерять напряжения
начиная с 10 мВ с погрешностью 0,1 %. С увеличением
измеряемой Беличины точность приборов возрастает.
Для измерения средних значений то1юв и напряже­
ний можно испо.1Jьзовать приборы эле1промагнитной,
эле1{тродинамической, ферродинамичес1юй, выпрями­
тельной, термоэле1{тричес1юй и электронной систем, циф­
ровые приборы и компенсаторы переменного тока; для
измерения напряжений можно воспользоваться также
эле1<Тростатическими вольтметрами.
В тех случаях, когда необходима высокая точность из•
мерения, применяют приборы электродинамичес1{ОЙ сис­
темы. Если прибор должен потреблять малую мощность,
то предпочтительнее использовать приборы электронной
и эле1простатичес1юй систем или цифровые приборы.
Когда речь идет об измерениях синусоидальных токов и
напряжений с погрешностью поряд1<а 1,5-3,0%, очень
удобны многопредельные вольтамперметры выпрями­
тельной системы. Наиболее точным устройством для из­
мерения переменных токов и напряжений является 1юм­
паратор. С помощью компаратора измеряемый перемен­
ный ток или напряжение сравниваются с постоянным то­
ком (напряжением).
Основным элементом компаратора является преобра­
зователь П, выходная величина которого у одинаковым
249
образом зависит от действующего значения переменного
и постоянного входных сигналов (рис. 10.4). В качестве
такого преобразователя могут быть использованы элект­
ростатичес1ше и электродинамичес1ше измерительные
механизмы или термоэлектрические преобразователи.
Компаратор работает с.т�едующим образом. Вначале при
помощи ключа на вход преобразователя П (например,
термоэлектричес!(ого) подается измеряемый переменный
то1, (напряжение) х ~. Выходная величина у (например,
ЭДС) измеряется потенциометром постоянного TOI{a
ППТ. Затем при помощи ключа на вход преобразовате­
JIЯ подают постоянный ток (напряжение) Х- и регулируРис. 10.4. Структурная схема
компаратора.
ют его до получения того же значения у. Значение х_
измеряют потенциометром постоянного тока. Пос1юльку
х~ их_ создают на выходе преобразователя одну и ту же
величину у, то они равны друг другу.
Погрешность измерения х ~ с1,ладывается из погреш­
ности измерения х_ и разности погрешностей преобразо­
вателя Л при измерениих ~и х_, Так ка�{ погрешности
преобразователя при измерении переменного и постоян­
ного напряжений приблизитеJ1ьно равны, точность ком­
паратора высока. Наименьшая погрешность измерения
напряжения и тока с помощью компараторов составляет
0,01 %.
Для измерения больших тоrюв и напряжений исполь­
зуют те же приборы, что и для измерения средних токов
и напряжений, но амперметры включают через измери­
тельные трансформаторы ТОI{а, а вольтметры - через из­
мерительные трансформаторы напряжения. Трансформа•
торы служат для преобразования больших тоrюв и на­
пряжений в средние, которые могут быть непосредствен­
но измерены приборами переменного тока. Кроме того,
при помощи трансформаторов измерительные приборы
изолируются от первичной цепи, rюторая часто находится
под высоким напряжением. Запись переменных токов и
напряжений обычно производят самопищущими прибора­
ми ферродинамической системы.
В трехфазных цепях при симметричной нагрузке ог­
раничиваются измерением одного из линейных токов и
250
одного из линейных напряжений, причем измерения про­
из1юдят так же, ка�< и в однофазных цепях. В цепях низ­
кого напряжения измерение трех линейных напряжений
в случае их асимметрии производят одним вольтметром
с переключателем.
Для измерения трех линейных токов в трехфазной
трехпроводной цепи с применением трансформаторов то­
ка достаточно иметь два одинаковых трансформатора
(рис. 10.5).
А
в
с
l!z
6d
¼:д
Рис. 10.5. Схема соединения
трех амперметров через два
трансформатора тока.
Рис. 10.6. Схема соединения
трех вольтметров через два
1.-рансформатора напряжения.
Геометрическая сумма TOl{OB в трехфазной цепи рав­
на нулю, т. е. ток jc=-(iA+iв ). Амперметром А 3 изме­
ряется модуль тока l�=-(i�+i�).
Так как l�=IA IK 1
и l�=lв/K1, то l�=lc/K1, где К1 - коэффициент транс­
формации трансформаторов тока.
Для измерения трех линейных напряжений трехфаз­
ной трехпроводной цепи с применением трансформаторuв
напряжения достаточно двух одинаковы.х трансформато­
ров (рис. 10.6).
Геометрическая сумма линейных напряжений в трех­
фазной цепи равна нулю, т. е. UсА=-(ИАв+Ивс).
Вольтметром Vз измеряется модуль напряжения V �А=
=-(И�в+И�с). Так как U�в = VА в!Ки и U�c = Vвc/Ku,
то U�A=VcA!Ku, где Ku - коэффициент трансформации
трансформаторов напряжения.
10.4. ОСОБЕННОСТИ ИЗМЕРЕНИЯ ТОКОВ И НАПРЯЖЕНИЯ
ПОВЫШЕННОИ И ВЫСОl(ОА ЧАСТОТЫ
На рис. 10.7 приведена эквивалентная электрическая схема
приборов измерения токов и напряжений. На этой схеме А и
Ь - входные зажимы прпбора, С- емкост1, между входными за­
жимами, С1 и С2 - емкости входных зажимов А и Б относительно
общей точки, R и L - ак·rивиое сопротивление и индуктивность ра­
бо•1еи части амперметра или вольтметра.
[
Рис. 10.7. Эквнва;1ентная элект­
рическая схема nриборов лля
измерен.ия токов и напряжений.
Рис. 10.8. Схема вкточения ИП
параллельно резонансному кон­
туру.
У прибора, включенного в электрическую цепь, емкости С 1 и
С2 в основ11ом обусловлены емкостью входных проводов относитель­
но общей точки.
У приборов электронной, выпрямительной и эле"тростатнческой
систем индуктивность L очень мала и ее влиянием обычно nренеб­
реrают.
Если ток измеряют n uепи, 1�меющей общую точку, то один из
зажимов амперме-rра с11едует присоедюшть к этой точ1,е. В резуль­
тате, если точка Б соединена с общей точкой, емкость С2 замыкается
на1юрот,,о, а емкость С:1 оказывается включеrшой лара.1лелыю ем­
кости С. Ток утечю1 через этн емкости обусловлен то,1ько падением
напряжения на амперметре, которое обычно невелико. Емкости С1 и
С2 обы•шо составляют десятки пикофарад, н, только применяя спе­
циаJ1ы1ые меры для уменыuения рабочей длины подводящих про­
водов, удается снизить емкости С1 и С2 до единиц пикофарад.
У приборов электромагнитной. электролииамической и ферро;ш­
памической систем индуктивность L обычно составляет несколько
десятков микрогенри. Из-за сравнительно большой индуктивности
приборы этих систем можно применять в цепях с частотой не бо­
лее нескольких к11.11оrерц.
Входное сопротивление электро!'!ных и электростатических
вольтметров представляет собой параллельное соединение активного
сопротивления R и емкостей С и С1 (при условии, что точка Б �
общая). С увеличением частоты емкостное сопротивление Х =
=½тr./ (С-1-С1 ) уменьшаетсн. При С+С1=40 пФ и частоте f=50 Гц
емкостное сопротивление Х::,;8-107 Ом, а при частоте f= 10 МГц
соnрот1шлен11е Х,,,,400 Ом. Низкое входное соnротииленпе вольт­
МС'!ров на nысщшх частотах ограничивает возможности их приме­
нения.
252
ВкJ1юченне Нзмеритедьноrо прибора в цепь может изменить
эквивадентное сопротивление цепи, режим ее работы, а сдедова­
тельно, и измеряемую величину. Особенно сильно сказывается DJIИЯ·
ние измерительных приборов на режим цепи при измерениях токов
и напряжений высокой частоты. Значительное изменение режима
работы цели может произойти в связи с резонансны ми явлениями.
Например, включение измеритеJiьноrо прибора в контур, настроен­
ный в резонанс, иди параJ1ЛеJ1ьно контуру (рис. 10.8) может рас­
строить контур и резко изменнть измеряемую э;1ектрическую ве.�и­
чи11у вследствие влияния входного сопротивления прибора.
Для измерения токов в широком диапазоне частот применяют
амперметры термоэлектрическоi1 системы. Максимальный рабочий
диапазон частот термоэJ1ектрических МИJIJiиамперметров достигает
300 МГц, а минимальный предел измерения - 10 мА. Погрешность
при измерении токов высокой частоты достигает 3--5%.
ДJiя измерения напряжений в широком диапазоне частот применяются электронные,
ЭJiектростатические и термоэлекrрические
во.,ьтметры.
Э.'!ектроьшые вольтметры рассчитаны иа работу в д11ащ1зоие
частот от 20 Гц до 1000 МГц. Погрешность при измерении напря­
жений высокой частоты достигает 4-6 % .
Термоэлектрические вольтметры предназначены для работы в
диапазоне частот до нескольких мегагерц и и,1еют класс точности
1,5. Электростатические во.'!Ьтметры предназначены для работы в
диапазоне частот до 10 МГц и имеют во вce'II диапазоне частот
класс точности 1,0. По сравнению с э;1ектронными и термоэлектри­
ческими вольтметрами их чувствите.'!Ьность зпачнтеJIЬно ниже.
Для измерения токов и напряжений в звукоDО}! диапазоне час­
тот широко используют приборы выпрямительной системы.
НаибоJ1ее точными являются цифровые вольтметры переме1шоrо
тоJ<а. Погрешность вольтметров состав;1яет 0,5-1 % в днаnаэоне
•1астот до 1 МГц. С уменьшением частоты их точность существенно
в�зрастает.
ГЛАВА ОДИННАДЦАТАЯ
ИЗМЕРЕНИЕ СОПРОТИВЛЕНИЙ, ЕМl(ОСТЕй,
И НДУl(ТИВНОСТЕй
11.1 ОБЩИЕ СВЕДЕНИЯ
Сопротивление, емкость и индуктивность относятся к
важнейшим параметрам электрической цепи, с измерени­
ем которых часто приходится встречаться на практике.
В настоящее время известен ряд методов их измерения,
а приборостроительная промышленность выпускает для
этой цели средства измерения широкой номеню1атуры.
Выбор того или иного метода измерения и измерите.11ы1ой
253
аппаратуры при решении каждой конкретной измери­
те.1JЬной задачи зависит от многих ус.11овий: вида изме­
ряемого параметра, его значения, требуемой точности
измерения, особенностей объекта измерения и т. п. На­
пример, измеренпе сопротивлений твердых проводников,
1<ак правило, производится на постоянном то1{е, посколь­
ку прибор д.r1я измерений в этом случае проще по конст­
рукции и дешев,11е, чем аналогичный прибор дJlЯ измере­
ний на переменном то1{е. Однако измерение сопротивле­
ний проводниI<ов,
имеющих высокую влажность.
например жидкостей или сопротивлений заземлений,
производится только на переменном токе, та�{ I{ак ре­
зультат измерения на постоянном тоr{е будет содержать
бо.11ьшие погрешности вследствие влияния э.11ектролиза.
11.2. ОСНОВНЫЕ МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ
СОПРОТИВЛЕНИЯ ЭЛЕl(ТРИЧЕСl(Ой ЦЕПИ
ПОСТОЯННОМУ ТОКУ
Диапазон измеряемых на практике сопротивлений ши­
рок (от 10-8 до 10 15 Ом), и его условно делят по значе­
ниям сопротив.�1ений на три части - малые (менее
10 Ом), средине (от 10 до 106 Ом) и большие (свыше
I 06 Ом), в каждой из 1{оторых изме.рение сопротивлений
имеет свои особенности.
Сопротивление - параметр пассивный и в процессе
измерения обязательно преобразуется в активную элект­
рическую величину, значение которой затем измеряется.
При этом важно позаботиться о том, чтобы полученная
активная э.11еr<трическая величина правильно отражала
только измеряемое сопротив.11ение и не содержала из­
дишней информации. которая восприню1ается как по­
грешность измерения. Рассмотрим с этой точки зрения
особенности измерения малых и бо.11ыuих сопротивлений.
При измерении малых сопротивлений. например об­
моток трансформаторов или коротr<их проводов, через
сопротивление пропускается ток, а вознш{Шее на этом
сопротивлении напряжение измеряется. На рис. 11.1 по­
казана схема соединений при измерении сопротив.11ения
Rx короткого проводниl{а. ПосJiедний nодкточается к
псточнику тока 1 посредством двух соединитедьных про­
воднИI{ОВ с собственным сопротнвлением Rп. В местах
соединения этих проводников с измеряемым сопротивле­
нием образуются перехо;�.ные сопротивления контактов
254
R,,. Значение Rn завнсит от материала соединительного
проводника, его д.11ины и сечения, значение Rк - от пло•
щади сопрнкасающихся частей, их чистоты и силы ежа•
тия. Таким образом, числовые значения Rп и Rк зависят
ог многих причин и определить их заранее трудно, но им
можно дать примерную оценку. Если соедиrштельные
проводшши выполнены коропшм медным проводом с
сечением в несколько квадратных ми.11.11и:v1етров, а кон•
тактные сопротивления имеют чпстую и хорошо сжатую
Рис. 11 1. Схема соединений
при измерении сопротивления
коротко1·0 проводника.
Рис. 11 2. Суммирование термо-ЭДС потенциальных зажимов.
поверхность, то дJIЯ приближенных оценок можно при•
нять 2 {Rп+Rк)::::::; 0,01 Ом_
В качестве из�1еряемого напряжения в схеме рас.
11.1 можно использовать И 11, И22 или И зз . Если выбра­
но И11, то результат измеренпя отражает полное conpo•
тивление цепи между зажима!>.ш 1-1':
Ru = Ин// = Rx + 2 (Rп + R1JЗдесь uторое слагаемое по.11езной информации не со•
держит и представляет собой погрешность, относнтель•
ное значение которой с5 в процентах равно:
6=
Rн-Rx
Rx
100
=
2 Rп+R1' 100.
Rx
При измерении ма.11ых сопротивлений 9та погреш•
ность может быть бо.11ьшой. Например, ес.11и принять
2(Rи+Rк ) ::::::;0,01 Ом, а Rx =0,1 Ом, то б::::::; 10%. Погреш­
ность с5 уменьшится, ес.11и в качестве измеряемого напря•
жения выбрать И22 :
1"<22 = И22fl = Rx + 2Rн•
255
Здесь сопротив.ТJение подводящих проводов ис1<люча­
ется из результата измерения, но остается влияние Rк.
Результат измерения будет потюстью свободен от
вю1яния Rп и Rи, если в качестве измеряемого напряже­
ния выбрать Изз:
Схему вк.ТJючеиия R x в та1юм случае называют четы­
рехзажимиой: первая пара зажимов 2-2' предназначена
для подвода тока и называется токовыми зажимами,
вторая пара зажнмов 3-3' - д.ТJя съема напряжения с
измеряемого сопротив.ТJен11я и называется потенц.иаль­
ными зажимами.
Применение токовых и потенциальных зажимов при
измерении ма.ТJых сопротивлений является основным
прпемом ДJIЯ устранения влияния соединительных про­
водов и переходнык сопротивлений на результат изме­
рения.
Другая особенность измерения малых сопротивлений
заключается в том, что значение напряжения U33 часто
бывает маJ1ым - единицы милливольт, лоэтому прихо­
дится считаться с возможностью появления в местах
контактов термо-ЭДС. Термо-ЭДС образуется в местах
соединения двух разнородных проводников; она зависит
от материала �.роводников и температуры места их сое­
динения и в ряде случаев достигает сотен микровольт.
В схеме рис. 11.l термо-ЭДС может возникнуть в токо­
вых и потенциальных зажимах. Термо-ЭДС токовых
зажимов на U33 в.ТJияния не оказывает, и ее пе учитыва­
ют. Термо-ЭДС потенциальных зажимов (е 1 и е2, рис.
11.2) суммируются с U33 и могут внести значительную
погрешность в результат измерения. Основные приемы
борьбы с термо-ЭДС заключаются в выравнивании тем­
ператур потенциальных зажимов (если разность темпе­
ратур между потенциальными зажимами равна нулю, то
и терма-ЭДС между нимн отсутствует), а также в про­
ведении двух измерений И при разных направлениях то•
ка /. ДeJJo в том, что термо-ЭДС II ее по.ТJярность от на­
ттрав.ТJения тока / не зависят, а направ.ТJенrrе Их зависит
(рис. 11.2). В результате измерения получают два зна­
чения напряжения:
И' = U х + е1 - е2;
И"= Ux -e1 + е2•
256
ПоJiусумма по.ТJученных результатов свободна от
термо-ЭДС:
U = (U' + U")/2 = U"' .
При измерении боJ1ьших сопротив.11ений, например
изолирующих материаJюв иJiи изделий из них, rюступа­
ют так: к сопротив.ТJению прию1адывают напряжение, а
возникшии. ток измеряют и по не11у судят о :н-rачснш1 из­
меряемого сопротив.ТJения.
При измерении сопротнвJiения нзоJiяции различают
объемное и поверхностное сопротивJiения. Например,
при измерении сопротивления твердого диэ.11.ектрю<а к
нему прю(J1адывают два эле1<трода А и Б (рис. 11.3) с
aJ
Рис. 11.3. Схемы дJ1я измерения сопротивления изоляции.
а- подключе1111е электродов А и Б и 11змсре11не тока f=f v+l5; 6- 11змере•
н.ве объс,1ного сопротивления; в - измерение поверхностноrо соnропшJ]ення.
ЭДС Е и измеряют возникший в цепи ток /. Как видно
из рис. 11.3, а, ток I содержит две составляющие: I =
=lv +ls , где lv -ток, протекающий по объему диэле1<т­
ри1<а, а ls - по его поверхности. Ток измеряют ампер­
метром, в 1<а 11естве которого обычно используют микро­
ампер:-,,rетр и.тн1 гальванометр. Чтобы определить
объемное и поверхностное сопротив.11.ення отдеJiьно, надо
ток I v отде:1 ить от тока /• и порознь из:v1ерить их значе­
ния. Эта задача решается с помощью охранного кольuа
В (рис. 11.3, 6 и в), которое обычно выполняется из ме­
ди и накладывается на испытуемый диэлектрик так, что
один из э.11ектродов (э.11ектрод А на рис. 11.3, б и в) ока­
зывается в центре этого ко.11ьца. Кольцо должно плотно
17-!\70
прилегать к материа.nу диэлектрика, а расстояние меж­
ду ним и внутренним электродом должно быть доста­
точно боJ1ьшю1. При измерении объемного сопротивJiе­
ния кольцо подкJrючают I< источниr<у питания, как
nоI<азано на рис. 11.3, б, оп<уда видно, что 11ерез э.nект­
род А протеI<ает толы<о ток lv , То1< !, между э.11ектрода­
ми А и В практически отсутствует, так ка�< потенциалы
этих эJ1ектродов почти одинаковы, а TOJ{ (. текущий от
1<0J1ьца В к электроду Б, в цепь измерителя то1<а не по­
падает.
На рис. 11.3, в показана схема измерения поверхно­
стного сопротивления. Здесь fv =O, так как разность
потенциалов между эле1<тродами А и Б равна нулю, а
амперметр показывает значение тока, протекающего
между электродами А и В; то1< 1; в uепь из�1еритеJiя то­
ка не попадает.
При испытании диэлектриков с.т�едует иметь в виду,
что их э.т�ектрическое сопротивление зависит от многих
ус.т�овий - окружающей температуры, влажности, зна­
чения испытуемого напряжения, продо.ттжитеJ1ьности его
действия и т. д.
Измерение сопротив.т�ения электричесrюй цепи г.с.сто­
янному то1<у на пра1сrю<е производится на�1б1.м�е часто
методом амперметра и вольтметра, .nоrометрическим ИJIИ
мостовым методом.
Метод а;,тер1,1етра и вольтметра. Этот метод основан
на разде.т�ьном измерении то1<а / в цепи измерж·моrо со­
противления Rx и напряжения U на его зажимах и по­
следующем вычисJrении значения N.x по показаниям из­
мерительных приборов:
R.. ='"' U/1.
Обычно ток / измеряют амперметром, а напряжение
U - вольтметро�1, этим объясняется название метода.
При измерении высокоомных сопротив.r�ений, например
сопротивления изоляции, ток / мaJI и его из�1еряют мил­
.ттиамперметром, микроамперметром и.т�и rаш,ванометром.
При измерении низкоомных сопротивлений, например
кус1<а провода, Оl{азывается малым значение И и д.ТJя
его nзмерения применяют ми.т�.ТJивольтметры, микро­
вольтметры или rа.nьванометры, Однако во всех этих
CJiy•1aяx метод измерения сохраняет свое наименова­
ние - амперметра и во.т�ьметра. Возможные схемы вк.т�ю­
чения приборов показаны на рис. 11.4, а, б.
258
Достоинство метода заключается в простоте его реа­
лизации, недостаток - в сравнительно невысокой точно­
сти результата измерения, которая ограничена классом
точности применяемых измерительных приборов и мето­
дической погрешностью. Пос.ТJедняя обуслов.ТJена nлияни­
ем мощности, потреб.ТJяемой измерительными приборами
в процессе измерения, другими словами - конечным
значением собственных сопротив.ТJений амперметра Rл и
вольтметра R v. Выразим методическую погрешность че­
рез параметры схемы.
В схеме рис. 11.4, а вольтметр показывает значение
напряжения на зажимах Rx , а ампер:v1етр - сум�1у то-
UА
п:;----------�
а)
Рис. 11.4. Схемы д.�я измерений малых (а) 11 бо.,ьших (6) сопротив­
лений методом амперметра и вольтметра.
1<0в / v+I. СJ1едовате11ьно, результат измерения R, вы­
численный по поr<азаниям приборов, будет от.тшчаться
от Rx:
Rx
И
_
R= l +И
U/Rx + U!Rv
1 т R)Rv
fv
Относительная погрешность измерения в процентах
R R
Rx!Rv
100�- Rx 100.
б= - x 100=1 -1- R,/Rv
Rv
Rx
Здесь приближенное равенство справедливо, так как
прн правильной организации эксперимента предполага­
ется выполнение условия Rv � Rx.
В схеме рис. 11.4, 6 амперметр показывает значение
тока в цепи с Rx, а вольтметр - сумму падений напря­
жений на Rx U и амперметре Vл. Учитывая это, можно
по показаниям приборов вычислить резу.ТJьтат измере­
ния:
17*
259
Относительная nоrрешность измерения в процентах
в, данном случае равна:
= R-Rx 00 R
1 = л 100.
б
Rx
Rx
Сравнивая по.ТJученные выражения относите.ттьных по­
грешностей, прихо,з,им к выводу: в схеме рис. 11.4, а на
методическую погрешность резуJiьтата измерения оказы­
вает влияние только сопротивление Rv; д.ТJя снижения
этой погрешности необходимо обесnечнть условие R x <<
<f:.Rv; в схеме рис. 11.4, 6 на мстодпческую погрешность
результата измерения оказывает влияние только Rл ;
снижение этой погрешности достигается выполнением
ус.1ювия Rx ;pRл . Такпм образом, при практическом ис­
пользовании данного метода можно ре1юмендовать пра­
ви.rю: измеренnе ма.11ых сопротивлений с;1едует произво­
дить по схеме рис. 11.4, а; при измерении больших
сопротиВJ1ений предпочтение следует от,1.авать cxe;v1e
рис. 11.4, 6.
Методическую погрешность результата из�ерепия
можно исключить путем введения соответствующих по­
правок, но для этого необходимо знать значения Rл и
Rv. Если они известны, то из результата измерения по
схеме рис. 11.4, 6 следует вычесть значение R л ; в схе:..1е
рис. 11.4, а результат измерения отражает пара.ттлельное
соединение сопротивлений Rx и Rv , поэтому значение
Rx ВЬ!Числяют по формуле
R
R�-=1-N!Rv "
Есди при данном методе применить источник пптания
с заранее известным напряжением, то необходимость из­
мерения напряжения во.ттьтметром отпадает, ·а ШI<алу
амперметра можно сразу отградуировать в значениях
измеряемого сопротивления. На этом принципе основано
действие многих моде.1Jей выпусI<аемых промышленно­
стыо омметров непосредственной оценl{И. Упрошt?пная
прииципиадьная схема таI<ого омметра показана на рис.
11.5. Схема содержит источниl{ ЭДС Е, добавочный ре­
зистор Rд и амперметр (обы<1но микроамперметр) А.
При подключении I< зажимам схемы измеряемого сопро­
тивления Rx в ц епи возникает то1< /, под действием кото­
рого подвижная часть амперметра поворачивается на
угол et, а его указатеЛI, отклоняется на а делений
260
шкалы:
а= _Е_ --------С1
где С1 - цена деления (постоянная) амперметра; RA сопротивление амперметра.
Следовательно, шкала омметра нелинейная. Стабиль1-юсть градуировочной характерис1•ики требует обеспече­
ния стабильности всех коэффициентов уравнения. Меж­
ду тем источник питания в такого рода приборах обычно
реализуется в виде сухого элемента напряжения, ЭДС
которого падает по мере его разряда. Ввести поправку
на изменение Е, как видно из уравнения, можно путем
соответствующей регулировки С, или R д- Существуют
омметры, в которых регулируе1ся С1 пrтем изменения
Рис. 11.5. Принципиальная схе­
ма омметра с последоDатель­
ным включением измеряемого
сопротивления.
Рис. 11.6. Принципиа.!!ьная схе­
ма омметра с пары1лельным
включением измеряемого со­
противления.
индукции в зазоре магнитной системы амперметра с
помощ�ю магнитного шунта. В этом случае поддержи­
вается постоянство отношения Е/С1 и градуировочная
характеристика прибора сохраняет свое значение неза­
висимо от значения Е. Регулировка С1 производится так:
зажимы прибора, к которым подключается Rx, замыка­
ются накоротко (Rx =O) и регулировкой положения
магнитного шунта добиваются установки указателя ам­
перметра на нулевую отметку шкалы; последняя распо­
ложена на крайней правой точке шка.r1ы_ На этом регу­
лировка заканчивается, и прибор готов к измерению
сопротивлений.
Данный метод измерения сопротивлений применяется
и в комбинированных приборах ампервольтомметрах.
Однако эдесь регулировка Ст недопустима, так как это
приведет к нарушению градуировки прибора в режимах
17а-970
26i
измерений токов и напряжений. Поэтому в таких прибо­
рах поправку на изменение ЭДС Е вводят регулировкой
сопротивления добавочного резистора Rд, который вы­
полняется в виде резистора с изменяемым сопротивлени­
ем. Процедура регулировки та же, что и в приборах с
регулируемой магнитным шунтом магнитной индукцией
в рабочем зазоре. В этом случае градуировочная харак­
теристика прибора изменяется, что приводит к дополни­
тельным методическим погрешностям. Однако парамет­
ры схемы выбираются так, чтобы указанная погреш­
ность была небольшой.
Возможен другой способ подключения измеряемого
сопротивления - не последовательно с амперметром, а
параллельно ему (рис. 11.6). Зависимость между Rx и
углом отклонения подвижной части в данном случае
также нелинейная, однако нуJ1евая отмеТI<а на шкаJ1е
расположена слева, а не справа, как это имело место в
предыдущем варианте. Такой способ подключения изме­
ряемого сопротивления применяется только при измере­
нии малых сопротивлений.
Логометри•tеский метод. Этот метод основан на из­
мерении отношения двух токов / 1 и /2, один из которых
протекает по цепи с измеряемым сопротивлением, а дру­
гой - по цепи, сопротивление которой известно. Оба
·гока создаются одним источником напряжения, поэтому
нестабильность последнего в известных предеJ�ах прак­
тически не влияет на точность результата измереншт.
ПринципиаJ1ьная схема омметра на основе логометра
представлена на рис. 11.7. Схема содержит измеритель­
ный механизм на основе лоrометра магнитоэлектричес­
кой сисrемы с двумя рамками. Измеряе�юе сопротивле­
ние может быть включено последовательно (рис. 11,7, а)
ИJIИ параллельно (рис. 11.7, 6) относительно рамки из-
1 Е
R
а)
бJ
Рис. 11.7. Схемы омметров на основе логометра ддя измерения боJJЪ­
ш:н (а} и малых (6) сопротивлений.
262
мерительного механизма. Последовательное включение
применяется при измерении средних и больших сопро­
тивлений, параллельное- при измерении малых сопро­
тивлений. Дальнейшее рассмотрение работы омметра на
основе логометра будем вести на примере схемы рис.
11.7, а. Если пренебречь сопротивлением обмоток рамок
лоrометра, то угол поворота подвижной части а зависит
только от отношения сопротивлений:
а= F(R xfR).
Сопротивлением резистора R задается диапазон пз­
меряемых омметром сопротивлений.
Напряжение питания логометра влияет на чувстви­
тельность его измерительного механизма к изменению
измеряемого сопротивления и не доJrжно быть ниже оп­
редеJrенного уровня. Обычно напряжение питания ;юго­
метров устанавливают с некоторым запасом по отноше­
нию к минимально допустимому уровню для того, чтобы
его возможные колебания не вJrияли на точность резуль­
тата измерения. Значение
напряжения питания и спо­
соб его получения зависят от
назначения ом�1етра и диа­
пазона измеряемых сопро~Vп
тивлений: при измерении
малых и средних сопротив­
пений применяют сухие ба➔
Рис. 11.8. Схема одинарного моста.
тареи, аккумуляторы ИJIИ источники питания от промыш­
ленной сети, при измерении больших сопротивлений, на­
пример, изоляции,- специальные генераторы с напряже­
нием 100, 500, 1000 В и более.
Изfrtерение сопротивлений
одинарнtм,1 .мостом.
Схема одинарного моста представлена на рис. 11.8. Об­
щие сведения о работе мостовых цепей изложены в гл. 6.
Здесь же рассмотрим причины, в результате которых
ограничен диапазон измеряемых мостом сопротивлений,
основные источники погрешностей и порядок работы с
мостом.
Допустим, что измеряемое сопротивление R � подклю­
чается соединительными проводами к зажимам 1-1' перJ7a*
263
воrо ПJ1еча моста. Обозначим сопротивление соед1ши­
тельных проводов с учетом переходных сопротивлений
контактов Rn . Зажимы 1-1' крепятся на диэлектрике.
Обозначим сопротивление изоляции между ними Rиз•
Полное сопротивление первого плеча равно:
(Rx + 2Rn) Rиэ
Rx + 2Rn
R1_
1
+
+
2R11/ R11a + RxlRиз
Rx + 2Ru R11з
Обычно значение Rп мало и при коротких медных
проводах можно принять: 2Rп�О,01 Ом. Зажимы 1-1'
размещаются на высококачественном диэлектрике, и для
Rиз можно принять: Rнз� 1011 Ом. С учетом введенных
допущений выражение для R 1 можно упростить и в об­
ласти малых Rx считать:
R1 = Rx + 2Rn•
Относительная погрешность 6 1 сопротивления перво­
го плеча моста, % , равна:
f = Ri-Rx 100 = 2__!!!!_ 100.
\
Rx
Rx
Если потребовать, чтобы эта погрешность не превы­
шала 0,1 %, т. е. 6 1 �0,l %, получим нижнюю границу из­
меряемых одинарным мостом сопротивлений:
2 Rп 100 � О 1
Rx
""= ' '
откуда Rx� 10 Ом.
В области больших Rx влиянием Rп пренебрегают и
выражение для R1 принимает вид:
_
Rx
R11 -1-RxlRиз
Относительная погрешнос ть 6 1 сопротивления перво­
го плеча, %, равна:
Rx
i\ = Ri-Rx 100 = _
100 � - Rx 100.
Rx
Rx +Rnэ
R11з
Если потребовать, чтобы и в данном случае имело
место неравенство 16 1 1�О,l % , получим оценку верхней
границы измеряемых одинарным мостом сопротив.r1ений:
Rx 100<;:0,l,
откуда Rx� 108 Ом.
264
Rиз
Таким образом, приходим к выводу, ч то дР!апазон
11змеряемых одинарным мостом сопротивлений от 10 до
108 Ом ограничен снизу влиянием сопротивлений подво­
дящих проводов и переходных контактов, а сверху - со­
противJ1ением изоляции. Указанные зна•1ения границ 10
11 108 Ом являются условными. Они справедливы лишь
при введенных выше допущениях. Существуют приемы,
позволяющие расширить значения указанных границ.
Например, область измеряемых одинарным мостом ма­
лых сопротивлений можно расширить путем переJ1:ода к
четырехзажимной схеме включения измеряе•,1:ого сопро­
тивления (рис. 11.9). Схема строится так, чтобы сопро­
тивления подводящих про­
водов в первое ш1ечо моста
не входили, а входили в це­
пи, где их влияние не очень
заметно. На рис. 11.9 Rп 1 и
Rпз включены в диагонали
питания и нагру'3кп. В урав- Rп4
нение равновесия они не вхо­
дят и погрешность в резуль➔
Рис. 11 9. Четырехзажимпая схема
включения измеряе'Wоrо сопрО'rив­
ления.
тате измерения Rx не вносят; Rп2 и Rп" оказались ВКJIЮ­
ченными в третье и второе плечи моста, но значения R2
и R3 выбираются достаточно большими, чтобы влиянием
Rп" и Rn 2 можно было пренебречь.
Обратимся к погрешностям моста. Ест1 известно, что
мост уравновешен, а сопротивJiением подводящих про­
водов и переходными сопротивлениями конrактов мож­
но пренебречь, то справедливо равенство
Rx = R2 ;;
Проделаем над этим равенством операции u'IОrариф­
мирования, а затем дифференцирования и полуЧИ'\i:
ln R х = ln R2 + ln Rз - ln R4;
dRxlRx = dRiR2 + dRJRз - dR4/R4,
Перейдем от бесконечно малых dR к конечным при•
265
ращениям ЛR.:
ЛR xlRx = ЛR2/R2 + ЛRs/Rз -ЛRiR4,
Отношение вида ЛR/R предстаВJiяет собой не что
иное, как относите.r�ьную погрешность сопротивления 6.
Следовательно, последнее выражение можно предста­
вить в виде
6х = 62 + б:i-64 ,
ительная
погрешность измер�ния Rx; 62,
где 6х - относ
бз, 64 - относительные погрешности сопротивлений вто­
рого, третьего и четвертого плеч моста.
Полученное выражение справедливо только в том
случае, когда мост уравновешен. В процессе уравнове­
шивания моста можно выделить две операции (см. гл. 6):
выбор поддиапазона измерения (регулировка отношения
R.з/R4) и точное уравновешивание (регулировка R 2 ).
Контроль равновесия производится сравнивающим уст­
ройством СУ (см. рис. 11.8). В качестве сравнивающего
устройства обычно испоJ1ьзуются rаJiьванометры или
специаJ1ьные приборы - микровольтнаноамперметры.
ОбJ1адая высокой стабиJ1ьностью нyJieвoro уровня и реа­
гируя на малейшие изменения тока в индикаторной диа­
гонали, сравнивающие устройства не выдерживают
больших токовых перегрузок, которые возтшают, ecJiи
состояние мостовой схемы далеко от равновесия, поэто­
му дJiя защиты сравнивающих устройств от перегрузок в
индикаторную диагональ моста вводится добавочный
резистор Rд (см. рис. 11.8, 11.9), значения которого
обычно 105 Ом или более.
Важным параметром моста является напряжение
питания Ип, Значение Ип влияет на чувствительность
моста и не может выбираться произвольно. Дело в том,
что для уравновешивания моста необходимо обеспечить
определенную чувствитеJiьность всей мостовой установки
S м= Ла/ЛR (Ла - отклонение указателя сравнивающего
устройства), которая определяется чувстнительностыо
мостовой схемы Sсх=ЛR/Л/ и сравнивающего устройст­
ва Sс)=Ла/Л/:
S = Ла = � � = S S
r.t
ЛR
Л/
ЛR
су
сх·
Чем выше будет Scx , тем более грубое, следователь­
но, более надежное и дешевое сравниваю щее устройство
можно выбрать. Чувствительн ость схемы Scx зависит
266
от Un и соотношения сопротивлений резисторов мостовой
схемы, причем зависимость от Un имеет вид прямой про­
порционалыrости. С точки зрения повышения S cx значе­
ние Uп целесообразно выбирать возможно большим.
Ограничением на этом пути является предельно допусти­
мая мощность, рассеиваемая в резисторах плеч моста.
В реальных мостах значение Ип лежит в пределах от
десятых долей до сотен вольт.
Измерение сопротивлений двойны.м 1,юсто1,1. Двойной
мост предназначен для измерения ма.!!ых сопротивлений.
Его г.ринципиальная схема представлена на рис. 11.10.
Измеряемое сопротивJ1ение
Rx включено последоватеJIЬ·
но с образцовым Ro , зна­
чение которого выбирает­
ся одного порядка с из­
меряемым. При помощи
R
Ro
nереключателя SA цепь
Rx
подключается 1< источни­
ку питания с папряжеРис. Il.10. Принципиальная схе;; \ Uл
;,.! ________.
двойного моста.
нием Uп. Поскш1ьку Rx и Ro ма.11ы, то удобно контроли­
ровать не напряжение питания на зажимах Rx и Ro, а
ток в этой цепи, поэтому в схему введен амперметр. Со­
противление проводника, объединяющего Rx и Ro с уче­
том переходных сопротивлений контактов, обозначено
R. Уравнения равновесия моста можно найти следую­
щим образом: треугольник сопротивлений R, R 3, R4 пре­
образуется в звезл:у известными из электротехники мето­
дами, при этом схема двойного моста преобразуется в
схему одинарного (четырех11лечего) моста, уравнение
равновесия которого уже известно. После указанных
преобразований получим:
R
х
=
R
0
R1
°ri;
+
R
R-I-R3 +R«
( R1 R4
�-
)
R3
•
Здесь важно подчеркнуть, что результат измерения
Rx зависит от неизвестной величины R, что приводит к
погрешностям измерения Rx , особенно значительным
при измерении очень малых сопротивлений. Поэтому
принимаются меры к тому, чтобы ослабить эту эависи267
мость и исключить второе слагаемое (содержащее R) из
уравнения для R x . Для этого в схеме моста обеспечива­
ют выполнение условий R 1 =Rэ , R2=R4• Абсолютно
точно выдержать указанные условия на практике не
удается из-за наличия инструментальных погрешностей
(неточности изготовления резисторов R1-R 4). В связи с
этим уменьшают значение R путем выбора проводника
связи предельно коротким и с большим сечением, в ре­
зультате чего во многих сJ1учаях можно пренебречь
вJiиянием второго слагаемого в уравнении равновесия и
nредставить его в виде
R ~ R R1
:х
~
о R2
•
Выбор предела измерения производится изменеt1ием
R2, поэтому значение R2 выбирается равным 10", Ом
(где n= l, 2, 3 ...). Аналогично R2 изменяется и R4, что
обеспечивает выпоJшение усJ1овия R2 =R4. Уравновеши­
вают мост на выбранном поддиапазоне измерения реrу­
лировкой сопротивления резистора R 1, который об1;,1чно
выполняется в виде многодекадноrо магазина сопротив­
Jiений. УСJювие R з =R 1 обеспечивается так: Rз выполня­
ется конструктивно аналогично R 1 и содержит одина, ко­
вое с R1 число декад; переключатели в соответству1qщих
декадах R1 и Rз имеют одну общую ручку управления,
поворот которой вызывает одновременное и одинаковое
изменение R 1 и Rз.
Переключатель SA в схеме моста предназначен ддя
измерения значения R x при разных направJ1ениях тока
/тт. Этим приемом пользуются для исключелия влияния
термо-ЭДС, возникающих в различных местах моста
(прежде всего на потенциаJ1ьных зажимах R x и Ro), на
результат измерения. Дело в том, ч то значение' и на11равJ1ение термо-ЭДС не зависят от направления тока
l п , а полярность падений напряжений на R x и Ro зави­
сит от направления этого тока. При одном направлении
fп термо-ЭДС вносят в результат измерения положитеJ1ьную погрешность (R:=Rx +Л), при другом -отри­
цательную (R:=Rx-Л), но абсолютное значение этой
погрешности I Л I остается одним и тем же. Взяв полу­
сумму результатов этих показаний, получим результат
измерения, в котором погрешность, вызванная действием
термо-ЭДС, оказывается исключенной:
268
(R: + R:)12 = (Rx + Л + Rх -Л)/2 = Rx.
Отечественная промышленность выпускает мосты ти­
пов Р39, Р329, МОД61, в которых измерите.s1ы1ая сх ема
с помощью простых переКJ1ючений преобразуется из
одинарного моста в двойной и наоборот. Такпм образом,
в одном типе моста удается охватить широкий диапазон
измеряемых сопротивлений.
Например, мост типа Р329 имеет диапазон измеряе­
мых сопротивJiений от 10-8 до 106 Ом, причем сопротив­
ления от 10-8 до l 02 Ом измеряются по схеме двойного
моста, а от 50 до 106 Ом - по схеме одинарного моста.
На рис. 11.11 показана схема двойного моста модели
.
ЧР
Рис. 11.11. Схема двойноrо моста Р329.
Р329. Мост содержит два встроенных образцовых рези­
стора Ro со значениями 1 и 0,001 Ом, но допускает вклю­
чение внешних образцовых резисторов различных номи­
наJюВ. Сопротивления плеч R 1 и Rз выполнены в виде
пятиде1<адных магазинов сопротивлений с сопротивления­
ми одной ступени декады соответственно 0,01; 0,1; 1; 10
и 100 Ом. Одноименные декады магазинов R1 и R3 имеют
одну ручку управления, что обеспечивает выполнение
269
условия R1=-Rз при любом положении ручек декад. PeJ
зисторы R2 и R4 выполнены в виде магазинов с одинако­
выми сопротивлениями 10, 100, 1000 и 10000 Ом. При ра­
боте с двойны!\1 мостом необходимо следиrь, чтобы вы­
по1rнялось условие R2=R 4. Ток питания моста не должен
превышать значений, определяемых максимаJ1ыю допу­
стимой мощностью, рассеиваемой в Rx и Ro. В частности,
допустимая мощность, рассеиваемая только в Ro, ограни­
чивает предельный ток при Ro= 1 Ом значением 0,5 А, а
при Ro=0,001 Ом-значением 32 А.
Диапазон измеряемых сопротивлений МО(:Тами типов
Р39 и МОД61 шире - от 10--в до 108 Ом. Сопротивления
от 10-8 до 10 2 Ом измеряются по схеме двойного моста
(МД), а от 10-4 до 108- по схеме одинарного моста
(МО), при этом измеряемые соnротиВJ1ения от 10-4 до
108
МО-11-
МО-2
Рис 11.12. Область применения одинарного и двойного мостов.
10 2 Ом в схеме одинарного моста включаются по четы­
рехзажимной схеме включения (МО-4), а от 102 Ом и
более- по двухзажимной (МО-2).
На рис. 11.12 показана обJ1ас1ъ прн.'lfенения одинар­
ного и двойного мостов, откуда видно, что диапазон из­
меряемых сопротивлений от 10-4 до 102 Ом перекрыва•
ется как одинарным, так и двойным мостом. Однако
точность измерения сопротивлений двойным мостом здесь
гораздо выше, чем одинарным, например в диапазоне от
10-4 до 10-2 Ом основная погрешность измерения по схе­
ме МД не превышает 0,02%, а по схеме МО-4 находится
в пределах от О, 1 до 1 % . Основное достоинство одина р­
ного моста - простота эксплуатации.
Моt-гы постоянного тока часто применяются при нс­
следовании кабелей и линий связи для установления
места их повреждения (если таковое имеется}, измере­
ния асим11,ютрии проводов, а также сопротивления изо:;я­
ции. Для этих целей наша промышленность выпускает
специальные мосты типов Р333, Р334, RM-61C и некото­
рые другие. Диапазон измеряемых сопротивлений такими
270
мостами уже, а погрешность измерения выше, чем моста­
ми, рассмотренными выше. Например, мост типа РЗ34 на
постоянном токе имеет диапазон измеряемых сопротив­
лений от 5• 10-3 до 106 Ом, который разбит на четыре под•
диапазона измерения; погрешность измерения в зависи•
мости от поддиапазона измерения лежит в пределах
от +0,5 до +5%.
11 3. ИЗМЕРЕНИЕ ЕМКОСТИ И ИНДУКТИВНОСТИ
Качество многих электрических цепей зависит от сте­
пени соответствия их параметров требуемым значениям.
Поэтому с измерением ем1<0сти С, индуктивности L 11
взаи'11ЕО11 инду1<Тивности М приходится встречаться час­
то. Элементов эле1прпчес1<ой цепп, которые бы в чистом
виде содержали толыю один нз каких-либо перечислен­
ных выше параметров, на пра,пике не существует. На­
пример, любой конденсатор помимо емкости характерп­
зуется та,<же конкретным сопротивлением потерь и со­
противлением изоляции между его об!(ладками; катушка
индуктивности имеет также сопротивление проводника
и межвитковую емкость. Однако па практике эти эле­
менты электрической цепи часто предстг�в,1яют упрощен•
ными схемами замещении, содержащими только два на­
иболее существенных элемента ( R и С; R и L), знание
значений которых позволяет правильно судить о состоя•
нии цепи.
На рис. 11.13, а, б по!(азаны эквивалентные схемы за­
мещения и ве,порные диагра111мы двух наиболее распро­
страненных способов представлении 1<01-ценсаторов - по­
следовательной и параллельной схемами замещения. В
,/
с
R
lr
J-_г--!==1-i
А
0-1,���J
с
и
�
Рис. 11.14. Схема замещения
катушки индуктивности.
+-
Рис. 11.13. Эквивалентные схе­
мы замещения и векторные ди­
аграммы конденсаторов.
а - nос.,,едовательная схема заме­
щения; б - ПdJ)ЭЛЛеJIЫIЭЯ,
271
ток опережает напряжение на угол,
таком конденсаторе
меньший 90°. Угол б, дополняющий угол между током
и напряжением в цепи конденсатора до 90° , называется
углом потерь. Конденсаторы принято характеризовать
двумя параметрами: емкостью С и тангенсом угла ди­
электрических потерь tg б. Как видно из рис. 11.13, а, в
последовательной схеме tg б отражает отношение паде­
ний напряжений на активном сопротивлении и ем1юсти,
а в параллельной схеме рис. 11.13, 6 -отношение токов.
При измерении параметров катушки индуктивности в
ней обычно выделяют и измеряют значения индуктивно­
сти L и сопротивления потерь R (рис. 11.14) или доброт1юсти Q, под которой понимают отношение индуктивного
сопротивления катушки к активному:
Q= roL!R.
Та1шм образом, для измерения параметров конденса­
торов и катушек индуктивностей необходимы методы и
аппаратура, позволяющие производить раздельное изме­
рение а1<Тивной и реактивной составляющих комплексно­
го сопротивления. Наиболее часто для этих целей при­
меняются мостовые методы.
Рис. 11 15. Мостовые схемы для измерения параметров конденса­
торов.
а - при последова·rельной схеме замещения; б - при параллельuоi! схеые за•
мещення.
Мосты для u.злtерения ешwсти и угла потерь конден­
саторов. На рис. [ 1 .15, а, 6 показаны мостовые схемы для
измерения параметров 1<онденсаторов с последователь­
ной и параллельной схемами замещения последнего. До­
пустим, что 1юнденсатор, параметры которого измеряют­
ся, ш<лючен в первое плечо моста и мост уравновешен.
272
В таком CJJ.yчae справедливо равенство
�1 = �2�з/�4·
Для схемы рис. 11.15, а
Z
- 1 = R1 +
.1ro1с1 ;
Z2 = R2; Z_э
-
= Rз + 1ro. с1 ;
Z4 = R4.
Подставив эти значения в уравнение равновесия мос­
та, получим:
R1
+
i�1 = �: (Rз + i�з ) •
Приравняв отдельно действительные и мнимые части
этого соотношения, найдем:
- Rз R2 • С1 = Сз R,
R1 R4 •
Ra •
Для схемы рис. 11.15, б
Ri
Rя
�1 =
• Z2 - R2· Z3 ; �4 = R4 ,
1
+ iыR1C1
'
-
-
'
-
-
1
+ iroRsC,
Подставив эти выражения в уравнение равновесия
моста, получим:
Rч
R1
= R2
1
+ /ыR.1С1
R1
1
+ jыR C
3
8
Из последнего уравнения следует
R2 • С _ с R4 • tg uR1 _ Rз-,
R _ --- 1- з-,
rоRяСз
R4
(J)R 1C1
R2
При испытании изоляции кабелей высокого напряже­
ния и некоторых других элементов мост питают от высо­
ковольтного источника. В таком случае применяется схе­
ма, показанная на рис. 11.16. Эта схема обеспечпваст не
только возможность измерения интересующих нас пара•
метров, но и безопасность работы с мостом, таи. к::�к ре­
гулируемые параметры R4, С4 находятся под низким
напряжением. Проделав математические выкладки, ана­
Jюrичные сделанным выше, можно показать, что для урав­
новешеююго моста в данном случае справедливы отно•
шения
R1 = R 2 с4 ; С1 = С3 !<4 ; tgб = ffiR 1C1 .
R2
С�
Мосты для измерения индуктивности. Катушка ин­
дуктивности, параметры которой измеряются, включает273
ся в одно из плеч четырехплечего моста, например в пер­
вое плечо �1 =R1+jroL1. Чтобы мост можно было урав­
новесить, по крайней мере, одно из оставшихся плеч
должно содержать реактивность в виде индуктивности
или емкости. Предпочтение отдают последней, так как
катушки индуктивности по точности изготовления усту-
Рис. l 1.17. Схема моста для из­
мерения параметров катушек
индуктивности.
Рис. 11.16. Схема высоковольт­
ного моста для измерения riа­
раметрон конденсатора.
пают конденсаторам, а стоят значительно дороже. Схема
та1юго моста по1<азана на рис. 11.17. Здесь
�2 = R 2 ; !з = Rз; !4 = R4/(I + jroR11C4).
При равновесии моста согласно общему уравнению
равновесия справеддиво
R1 + jroL1
=
R2
R3
R4
(1 + jroR,PJ.
Приравняв отдельно действите.11ы1ые и мнимые части,
получим два условия равновесия:
R1 = R2Rз lR11; L 1 = R2RзC4.
Добротность катушки Q выражается через наиден­
ные значения R 1 , L1 или значения R4, С4 :
Q = roLil R1 = roR,.C4 .
Уравновешивается такой мост регулировкой Rз и R 4•
Значение Rз пропорционально индуктивности, а R 4добротност11 измеряемой катушки.
Недостаток рассмотренной схемы - плохая сходи­
мость моста при измерении параметров катушек с низкой
добротностью. Если Q= 1, процесс уравновешивания уже
затруднен, а при Q<0,5 уравновешивание моста практи•
чески невозможно.
274
Измерение параметров катушек индуктивности с низ•
1<ой добротностью производится с помощью шестиплече­
го моста (рис. 11.18). �'словия равновеспя такого м1Jста
можно найти следующим образом: треугольюш, образо­
ванный элементами R 4, Rs и С, преобразуют в звезду, при
этом мост становится четырехплечим, уравнение равно­
весия которого уже знакомо. После указанвых nреобра•
зований находим два условия равновесия моста:
R1
=
R
R: Rз;
4 = С [R2Rз + R5 (R1 + R2)].
Мост уравновешивается pery•
лировкой R. и R5• Первоначально
регулировкой R4 досrигается вы­
поднение первого условия равно­
весия моста, а затем регулиров­
кой Rs- второго. Сопротивление
➔
Рис. 11.18 Схема шестиплечеrо моста
д.�я измерения параметров кат ушек ин­
дуктивности.
Rs не входит в первое условие, поэтому регулировка Rs
не нарушает его хорошей сходимости.
ГЛАВА ДВЕНАДЦАТАЯ
ИЗМЕРЕНИЕ МОЩНОСТИ
12.1. ОБЩИЕ СВЕДЕНИЯ
Измерение мощности в цепях постоянного тока и ак­
тивной и реактивной мощности в цепях переменного
то1<а - однофазных и трехфазных, трехпроводных и четы­
рехпроводных - производится в абсолютном большинст­
ве случаев электродинамическими и ферродинамически­
ми ваттметрами, выпускаемыми в соответствии с ГОСТ
8476-78.
В лабораторной практике применяются, главным об­
разом, электродинамические ваттметры класс.JВ точно­
сти О, 1; 0,2; 0,3 и 0,5. В промышленности при техниче­
ских измерениях широ1<0 применяются ферро:щi1:1миче­
ские ваттметры классов точности 1,0; 1,5 и 2,5.
275
Шкалы однодиапаэонных ваттметров проградуирова­
ны в значениях измеряемой величины, т. е. в ваттах,
киловаттах и т. д. Многодиапазонные ваттметры, предна з­
наченные, главным образом, для лабораторных исследо­
ваний, имеют неградуированную шка.11у. Перед исполь­
зованием таких ваттметров при известных номинальном
значении тока /пом и номинальном значении напряжения
U ro м выбранного д иапазона, а также числе делени й шка­
JJЫ аuт применяемого ваттметра необходимо определить
пх цену деления (постоянную) при cos (JJ= 1 по формуле
Сном = (И,юм /но м)/аrои·
Очевидно, что, зная значение цены деления Сно м для
данного ваттметра на выбранном диапазоне показаний,
нетрудно произвести отсчет значении измернемой вели­
чины.
Действительно, измернемое значение мощности, Вт,
равно:
rде а- отсчет по шкале ватrметра в деленинх.
Необходимо также напомнить, что как электродина­
мические, так и ферродинамические ваттметры имеют
равномерную шкалу.
Электродинамические ваттметры применяются для
измерения мощности в цеш1х постошнюго тока и цепях
переменного то1<а частотой до нескольких тысяч герц.
Ферродинамичес1ше ваттметры применяются для из­
мерения мощности в uепях переменного тока, главным
образом, промышленной частоты.
В § 5.7 бы.11и рассмотрены принцип действия и осо­
бенности работы одноэлементньrх электродипамичес;шх
и ферродпнамических ваттметров. Ниже излагаются во­
просы применения одноэлементных ваттметров в цепях
постоянного и переменного тока. Кроме того, в этой гла­
rзе анализируются возможности двух- и трехэлементных
электродинамических и ферродинамических ваттметров
лри измерении как активной, так и реактивной мощности
в трехфазных трехпроводных и четырехпроводных цепях.
Электронные ваттметры и специальные ваттметры,
nредназначенные для измерения мощности на высоких
час тотах, в данной главе не рассматриваются.
276
12.2. ИЗМЕРЕНИЕ МОЩНОСТИ В ЦEmtX
ПОСТОЯННОГО ТОКА
Анализируя выражение, определяющее мощность, вы•
деляемую в какой-либо нагрузке,
Р=Иl,
(12.1)
нетрудно видеть, что мощность Р может быть определе•
на косвешю путем проведения двух прямых измерений:
напрнжения на нагрузке И с помощью вольтметра и 1ока
в нагрузке 1 с помощью амперметра. Наиболее це.Гiесо­
образно применение в этом случае вольтметра и юшер­
метра магнитоэлектричес1юй системы.
На рис. 12.1,а, б приведены две схемы в1<люченинам­
nерметра и воJ1ьтметра. Выбор той или иной схемы обу-
V
Rнar
-+�
а)
V
Rнar
+�
о)
Рис 12.1. Схемы включения прнборов для измерения моnuюсти в це­
пи постоянного тока.
а - сопротиnление
нагрузки мало по сра.внеш1ю с сопротиuлением вольтм:ет"
ра; 6 - сопро-rивлен11е нагрузю1 ве.nнко по сравнению с сопрот ивлением ам•
перr�."етра.
словлен допускаемой методической погрешностью изме­
ренин, вызываемой соизмеримостью внутренних сопро­
тельно мало, схема рис. 12. 1, б - 1<оrда соnротив.Гiение
нагрузки Rпаг,
Схема рис. 12.1, а применнется при измерении мощ­
ности в случае, когда сопротивление нагрузки относи­
тельно мало, схема рис. 12.1,6- когда сопротивление
нагрузки относительно велико.
Более подробно вопрос о методической погрешности,
возни1<ающей при применении метода амперметра и
вольтметра, рассмотрен в § 11.2 при анализе погрешно­
сти косвенного измеренин этим методом сопротивлений
резисторов.
Несмотрн на кажущуюся простоту и доступность, ме­
тод амперметра и вольтметра для измерении мощности
Р на практике nрименнется крайне ред1<0. Это объясня­
ется тем, что названный метод требует одновременного
18-970
277
отсчета показаний двух приборов и последующего вы­
числения Р.
Наиболее просто и с необходимой точностью измере­
ние мощности производится непосредственно с помощью
одного одпоэлемептного эле1<тродинамического ваттмет­
ра. Включение такого ваттметра в цепь постоянного тока
необходимо осуществлять с собшодением правилыюсти
соединения генераторных зажимов обмотки цепи тока и
напряжения. На рис. 12.2 показано включение ваттметра
PW для измерения мощности Р.
Генераторный зажим токовой обмопш ваттметра
всегда вк.11ючается в сторону источника питания. Гене­
раторный зажим обмот1ш напряжения, в целях умень-
.. �•
pw
!(наг
-
а)
Рис. 12.2. Схемы включения ваттметра в цепь постоянного тока.
а - сонротнвление нагрузк11 относительно большое; б - сопротивление наrруз1<и относнтельно малое.
шения методп•rеской погрешности, может быть включен
таr<, как это по1(азано на рис. 12.2, а или 6.
Схема рис. 12.2, а применяется при относител.ьно бо.r:�ь­
шом значении сопротивле:�,:ия нагрузJ<И Rnaг, а схема
рис. 12.2, 6 - при относительно малом значении сопро­
тивления нагрузки Rиаг. (Сопротивление нагрузки соиз­
меримо с сонротивление111 токовой цепи. Значение со­
противления то1<0вой цепи всегда указывается па цифер­
блате прибора.)
В большинстве случаев применения ваттметров со­
противление наrруз,ш Rиal' относительно велико (значе­
ние сопротивления нагрузки намного больше сопротив­
ления последовательной токовой цепи ватгметра) и, сле­
дователыю, ваттметр необходимо в1<лючать по схеме
рис. 12.2, а.
Совершенно очевидно, что несоблюдение правильности
включения генераторного зажима любой из обмоток
ваттметра приводит к изменению направления враща­
ющего момента и выходу указателя ваттметра за преде­
.�ы шка.1ы.
278
12.3. ИЗМЕРЕНИЕ АJ<ТИВНОИ МОЩНОСТИ
В ЦЕПЯХ ПЕРЕМЕННОГО ТОJ<Л
Измерение активной мощности в однофазной цеrtи
производится одноэлементными ваттметрами. Измерение
аJ<тивной мощности в трехфазных цепях в лаборатор­
ных условинх также может быть проведено при помощи
одноэлементных ваттметров, включаемых в трехфазную
цепь по схемам с использованием метода одного, двух
или трех приборов. Однако при технических измерениях,
как правило, в этом случае используютсн специальные
двух- и трехэлементные ваттметры.
Расширение диапазонов измерения во всех случаях
применения ваттметров в цепях переменного тока осу->
Рис. 12 3. Схема включе­
нии ваттметра в одно­
фазную цепь неременноrо
тока и векторная диа­
грамма.
*
PW
z
[
ществляется с помощью измерительных трансформато­
ров тока и напряжения.
Измерение мощности методом одного прибора. При
использовании метода одного прибора измерение мощ­
ности осуществляется с помощью одноэлементноrо ватт­
метра. Метод применяется при измерении мощности в
однофазных цепях и симметричных трехфазных цепях
(комп.лексные сопротивления фаз одинаковы). И в том и
в другом случае обмотка напряжения ваттметра вклю­
чается на фазное напряжение, а обмот1<а то1<а включает­
сн в рассечку провода какой-либо фазы.
На рис. 12.3 показано включение одно3лементного
ватт метра в однофазную цепь переменного тока. Прене­
брегая методической погрешностью, записываем показа­
ние ваттметра:
(12.2)
Pw = И/ cosq>,
где И и / - действующие значения напряжения и тока
нагрузки; ер= < ( И, /).
На рис. 12.4, а, 6 показано включение одноэлементно­
го ваттметра в симметричную трехфазную трехпровод18*
279
JJyю цепь. На рис. 12.4, а нагрузка соединена звездой и
нулевая точка доступна. На рис. 12.4, 6 нагрузка соеди­
нена треугольником. Если ваттметр невозможно вклю­
чить в фазу так, как это показано на рис. 12.4, 6, ИJIИ
нулевая точка при соединении нагрузки звездой (рис.
12.4, а) недоступна, то в этом с.ТJучае используется ис" PW
о
а)
о)
Рис. 12.4. Схемы вклю•1ения ваттметра в трехфазную трехпроводную
11епь при полной симметрии.
а - нагрузка соединена звездой н ну.11еВая точка доступна; 6 - нагрузка сое·
дииеиа трсуrолью,ком.
кусственная нулевая точка. Искусственная нулевая
точка обычно создается с помощью двух резисторов ( со­
противление каждого резистора равно сопротивлению це­
пи обмотки напряжения ваттметра) и сопротивления
цепи обмотки напряжения. Сопротивление цепи обмотки
напряжения любого ваттметра либо приведено на циферблате nрнбора, либо
указывается в техниче­
• PW
ском паспорте на данный
Ао---ч,;ц.+.------,
прибор.
Включение ваттметра
в o---+-r---,
в трехфазную трехпро-
--
о
Рис. 12.5. Схема включения
ваттметра в трехфазную трех­
проводную цепь с недоступной
нулевой точкой при полной
симметрии.
водную цепь по схеме с искусственной нулевой точкой
показано на рис. 12.5.
Анализируя схемы в1<лючения ваттметров, приведен­
ные на рис. 12.4, а, 6, нетрудно видеть, что показание
ваттметра будет соответствовать мощности одной фазы.
280
Мощности одной фазы будет соответствовать и показа­
ние ваттметра, включение которого показано на рис. 12.5.
Действите.11ьно, фазное напряжение Vл, на которое
включена обмотка напряжения ваттметра, равно
и лв/Vз. Линейный TOI< lл в токовой обмотке ваттметра
/АВvз. С.11едователыю, показание ваттметра
Pw = Uлв lлв Vз"cos(z-л)lл ) =Ил вlлв cos(J),
Уз
т. е. ваттметр покажет мощность одной фазы, так как
nри симметричной нагрузке L(Vл, lл) =L(Илв, lлп).
Для получения мощности всей трехфазной цели во
всех трех рассматриваемых случаях необходимо поr<аза­
ние ваттметра утроить:
(12.3)
Р = ЗР1v.
рассмотренное
все
что
напомнить,
стоит
раз
Еще
справедливо ю�шь при измерении мощности в симмет­
ричных цепях, т. е. при симметрии напряжений и равен­
стве комплексных сопротивлений фаз.
Расширение диапазона измерения ватт:\1етра по тоr<у
при применении его для измерения мощности в низко­
вольтных цепях с большими токами производ:пся с по­
мощью измерительного трансформатора тока. Если ватт­
метр применяется в цепи переменного тока, кроме того,
еще и с повышенным напряжение!\'!, то диапазон измере­
ния его по напряжению расширяют с помощью измери­
тельного трансформатора напряжения.
Для примера на рис. 12.6, а показано вк,11ючение ватт­
метра для измерения мощности в однофазной цепи че-
Рнс. 12.6. Схемы включения ваттметра в однофазную цепь перемен­
ного тока.
а - с испопьзоваПJ{сМ измсритспьиого трансформатор11 тока; О - с испопьзо­
Dаl!ием измсритепьных т рансформаторов тока и напряжения.
281
рез измерительный трансформатор тока, а ыа рис. 12.6,6через измерительный трансформатор тока и измеритель­
ный трансформатор напряжения. С.п едует обратить
внимание на правильность включения генераторных за­
жимов ваттметра и соответствующих зажимов измери­
те.пы1ых трансформаторов. Нетрудно видеть, что в схеме
рис. 12.6, а значение измеряемой мощности Р определя­
ется умножением по1<азаная ваттметра Pw на номиналь­
пый коэффициент трансформации К1пом применяемого
измерите.пьного трансформатора TOI<a:
Р = P,-v К1ном.
В схеме рис. 12.6, 6 значение измернемой мощности
определнетсн по формуле
Р = Pw К/11ом К Uном,
где Кино•, - номинальный коэффициент трансформации
J,!СПользуемого измерите.пьного трансформатора напря­
жения.
д
мерение мощности методом двух приборов. Мето
двухИзприборов
испо.'lьзуется при из�1ерении мощности в
трехфазной трехпроводной цепи с помощью двух о!.tно­
э.пементных ваттметров. Метод дает правильные резуль­
таты независимо от схемы соединения и характера наА
.,
*
¼в
PW1
Uсв
в
с
*
*
а)
oJ
lв Uв
Рнс. 12 7 Схема вк.1юче11ия двух ваттметров в трехфазную трехnро•
водную цепь (а) и векторная диаграмма (б).
груз1ш как при симметрии, так и при асимметрии токов
и напрнжений. Кроме того, метод двух приборов приме­
няется д.nн включения э.nементов двухэде"1енrноrо ватт­
метра при измерении с помощью его мощности в трех­
фазной трехпроводной цепи.
На рис. 12.7, а изображена схема вк.nюченин двух од­
ноэдементных ваттметров. Обычно токовая обмотка од282
ного ваттметра, например PWJ, включается в фазу А, а
токовая обмотка другого ваттметра - PW2 - в фазу С.
Обмотки напряжения ваттметров вкшочаются на линей­
ные напряжения так, как это показано на рисунке.
На рис. 12.7, б представлена векторная диаграмма це­
пи для частного случая - случая симметрии то1юв и на­
пряжений.
Нетрудно видеть, что показание ваттметра PWJ в
-этом случае равно:
Pw1 = VАв Iл cos(3 0° + <р) = V11 /11 cos(30° + ер). (12 . 4)
АнаJюгично нетрудно опреде.rп1ть и показание ватт­
метра PW2:
Р1'(12 = Vcвlc cos (30 9 -ср) = V11 / соs(ЗО0 -<р). (12.5)
Учитывая, что при измерении мощности с использо­
ванием метода двух приборов общая мощность цепи
равна алгебраической сумме показаний ваттметров, а
также учитывая выражения (12.4) и (12.5), получаем:
р = Pw1 + P1v2 = Vn Incos(30 ° -1-- ер)+ U л Iл cos(30 ° -(j)).
11
После несложных преобразований имеем:
Р = Ил /11 2 COS 30 ° COS(j) = VЗИл lл COS(jJ.
(12.6)
Таким образом, сумма показаний ваттметров PWIJ и
PW2, определяемая (12.6), есть не что иное, как мощ­
ность трехфазной цепи.
Следует отметить, что в соответствии с (12.4) и
(12.5) поI<азания каждого ваттметра могут быть поло­
жительными или отрицательными n зависимости от зна­
чения угла QJ и его знака. Более того, при qJ=+60° пока­
зание ваттметра PWJ равно нулю, а при qJ=-60° нуле­
вое показание будет у ваттметра PW2. При <р=О, т. е.
при чисто активной нагрузке, показание ватт.метра PWJ
равно показанию ваттметра PW2.
Двухэлементные ваттметры, обычно называемые трех­
фазными ваттметрами, представляют собой коне11>у1щию
из двух измерите.rrьных механизмов одноэлементных фер­
родинамических ваттметров с одной общей подвижной
частью.
Примерное конструктивное выполнение двухэлемент1юго ферродинамического измерительного механизма,
широко используемого для построения трехфазных ватт­
метров, показано на рис. 12.8. Два шихтованных магни283
топровода / имеют неподвижные токовые обмот,ш: 2. Об­
мот1ш напряжения, выполненные в виде подвижных ра•
мо1< 3, укреш1ены на общей оси.
Включение токовых обмоток и обмоток напряжения
трехфазных двухэлементных ваттметров произвnдптся по
схеме рис. 12.7, в которой используется метод двух при•
боров.
Расширение диапазонов измерения трехфазных двух­
эдементных ваттметров, та�< же 1<а1< и одноэ.JJементных
Л1
Лz
А<>---.,......;,,;.,;s..;.!---"---И1
И2
B<>---+---+-+----r----
co---+--t--t--1..--+-'-+-----
PW2
Рис. 12.8. Двухэлементный фер­
родииамический нзмеритсльный
механизм.
Рис. 12.9. Схема включения
э.1Jементов
двухэ.!!емеитного
ваттметра в трехфазную трех­
nроводную цепь с 11сподьзова­
п11ем трансформаторов тока.
однофазных ваттметров, осуществляется с помощью из•
меритедьных трансформаторов тока и напряжения. На
рис. 12.9 показано включение элементов двухэлементного
трехфазного ваттметра в трехфазную трехпроводную
цепь через измерительные трансформаторы тока. Оче­
видно, что в этом случае для получения мощности цепи
показание ваттметра необходимо умножить на номи­
нальный коэффициент трансформации К1nом применяемых
измерите.JJьных трансформаторов тока. Есди измерение
мощности осуществляется двумя одноэлементными ватт­
метрами, то на значение К сном умножается арифмети­
ческая сумма показаний ваттметров.
Измерение мощности методом трех приборов. Извест­
но, что метод трех приборов применяется при измерении
мощности в трехфазной четырехпроводной цепи (при
этом используются три одноэлементных ва rтметра). Так
же как и метод двух приборов, метод трех приборов д,�ет
284
nравильные результаты независимо от схемы соед1шею1я
и характера нагрузки как при симметрии, так и при
асимметрии токов и напряжений. По схеме, ре:э.лнзу�о­
щей метод трех приборов, включаются также элемN1ты
трехэлементных трехфазных ваттметров.
На рис. 12.10 приведена схема включения грех одно­
элементных ваттметров по методу трех приборов в трехЗ
• PWf
Рис. 12.10. Схема включения
трех ваттметров в трехфазную
трехnроводную цепь.
Рис.
12.11. Трехэ.11ементиый
измери­
фсрродинамичеошй
тельный механизм.
фазную четырехпроводную цепь. Нетрудно видеть, что в
этом случае каждый ваттметр измеряет мощность одной
фазы:
P1f/1 =Р л=VлlлСОSf{!л;
P1f/2 =Рв=Vвlв соsq>в;
Р1"(1з =Ре = Velecosq>e,
где Ил , Uв и Uс-фазные напряжения; /А, Iв и /с­
фазные токи; QJл, q>в и (j)c - фазовые сдвиги между соот­
ветствующими фазными напряжениями и фазными то­
ками.
Очевидно, что для нахождения мощности трехфазной
четырехпроводной цепи необходимо взять алгебраическую
сумму по1<азаний всех ваттметров:
Р = Рл + Рв +Р е = Pw1 +Р1"(12 + Рwз.
(12.7)
Принципиальная конструкrивная схема трехэлемент­
ного трехфазного ферродинамического ваттметра приве­
дена на рис. 12.11. Каждый э.r�емент содержит выпо.r�285
ненный из магнитомягкого материала шихтованный
магнитопровод 1 с неподвижной токовой обмот1<0й 3. Под­
вижные рамки элементов 2 жестко укреплены на одной
оси. Таким образом, на подвижную часть трехфазного
трехэ.1Jементного ваттметра действует арифметическая
сумма моментов всех трех элементов. Непосредственное
включение элементов ваттметра в трехфазную четырех­
проводную цепь осуществляется по схеме, изображенной
на рис. 12.10.
Расширение диапазонов измерения трехэлементных
трехфазных ваттметров осуществляется так же, I<ак и
двухэ.r�ементных ваттметров,- с помощью измеритель­
ных трансформаторов тока и напряжения.
Следует отметить, что в последние годы nромышлен­
ностыо для измерения мощности в четырехпроводной
трехфазной цепи выпускаются специальные щитовые
ферродинамические двухэлементные ваттметры типа
Д323. Эле�енты этих ваттметров имеют не по одной, а
по две токовые обмотки. Дополнительные токовые об­
мотки включаются в четырехпроводную трехфазную
цепь по специальной схеме. Показания такого ваттметра
справедливы как при равномерной, так и при неравно­
мерной нагрузке фаз.
12.4. ИЗМЕРЕНИЕ РЕАКТИВНОИ МОЩНОСТИ
Реактивная мощность приводит I< дополнителы,ьN по­
терям в линиях э.ТJектропередачи и увеличению стоимости
вырабатываемой э.1Jектроэнергии и стоимости эксплу­
атации энергетических систем. Поэтому измерение реак­
тивной мощности наряду с измерением актишюй мощно­
сти в цепях переменного тока имеет большое нар•щнохо­
зяйственное значение.
Реактивная мощность Q, измеряемая в вольт-амперах
реа1{тивных (вар), может быть опреде.Тiена как в одно­
фазных цепях, так и в трехфазных трехпроводных и че­
тырехпроводных цепях переменного тока. Реактивная
мощность в однофазной цепи определяется выражением
Q=Ulsin(j).
(12.8)
Для трехфазной цепи реактивная мошность определя­
ется суммой реактивных мощностей отдельных фаз:
Q = Ил lлsin{j)л +Vв lв sin(J) в +Vcfcsinq)c. (12.9)
286
В случае полной симметрии трехфазной трех• или
четырехnроводной цепи нмеем:
(12.10)
Q= ЗVФ/Фsin<p,
или
Q = VЗV л lл sin (j).
(12.11)
Измерение реактивной мощности в однофазной цепи
может быть осуществлено э.11ектродинамическим или фер­
родинамическим прибором, у которого в соответствии с
(12.8) вращающий момент пропорционален не ко::инусу
угла между векторами тока и напряжения, а синусу это­
го угла.
Измерение реактивной мощности имеет практнчес1<ое
значение лишь у крупных потребите.11ей э.11ектр•)�нергни,
которые всегда питаются трехфазным перемепным на­
nряжением, поэтому в СССР измерение реактшшой
мощности в однофазных цепях производится только в
лабораторных уС.JJовиях при проведении каких-дибо ис­
следований с вк.11ючением обычных приборов 1ю спе11и­
а.11ьным схемам, так как приборостроите.11ыrой промыш­
ленностью лриборы д.11я измерения реа1пив1-юй мощносrи
в однофазных цепях не выпускаются.
Измерение реактивной мощности в трехфаJ1ый t1е11и
может быть осуществлено с помощью обычных однофаз­
ных ваттметров, т. е. приборов, предназначенных д.11я
измерения а�<тивной мощности и включаемых в трехфаз­
ную цепь по специальным схемам. Здесь, так же 1<ак и
при измерении активно�"� мощности трехфазной цепи,
может быть испо.11ьзован метод одного, двух и трех при­
боров.
Кроме того, реаюивная мощность в трехфазных це­
пях измеряется с помощью двух- и.11и трехэ.'Jементных
электродинамических юш ферродинамических вармет­
ров, элементы которых, практически ничем не отлиУаю­
щиеся от элементов обычных ваттметров, включаются в
трехфазную цепь также по специальным схемам.
В СССР напряжения трехфазных цепей, имеющих
пра1<тически всегда большую мощность, симметричны,
поэтому включение обы•1ных ваттметров и элементов
варметров в трехфазную цепь осуществляется 1ю схемам
с замененными напряжениями. Схемы с замененными
напряжениями дают правильные результаты при юобых
токах, как симметричных, так и асимметричных, о,11яа1ю
287
симметрия напряжений I<ак и в первом, так и во втором
случае должна быть обязательной.
Можно сформулировать следующие правила включе­
ния однофазных ваттметров и элементов варметров в
трехфазные цепи по схемам с замененными напряжени­
ями:
1) то1ювые обмотки необходюю включать в трехфаз­
ную цепь точно так же, как это осуществлялось при из­
мерении активной мощности (см:.§ 12.3);
2) обмот1<И напряжения необходимо включать на та�
кие напряжения трехфазной цепи (линейные или фаз­
ные), которые отстава.r�и бы на 90" от напряжений, по�
даваемых на эти обмотки при измерении активной мощ�
ности.
Сформу.,шрованные прави.т1а пригодны для включе­
ния однофазных ваттметров и элементов варметров как
по методу одного, так и по методу двух и трех приборов.
Прежде чем перейти к рассмотрению конкретных
схем, следует отметить, что расширение диапазонов из•
мерения приборов при измерении реа�пивной мощности
осуществляется так же, как и при измерении активной
мощности, т. е. с помощью измерительных трансформа�
торов тока и измерительных трансформаторов напряже­
ния. Поэтому в этом параграфе схемы с использованием
измерите.1JЬных трансформаторов не рассматриваются.
Измерение реактивной мощности методом одного
прибора. Метод одного прибора используется при вклю­
чении обычного однофазного электродинамического или
ферродинамического ваттметра, предназначенного для
измерения активной мощности, в трехфазную трех- или
четырехпроводную цепь. Очевидно, что в этом случае
трехфазнан цепь должна быть симметричной.
На рис. 12.12, а приведена схем:а включения взттмРт•
ра в трехфазную трехпроводную цепь. Штрн:хоnой лини­
ей по1<азано включение об�ютки напряженчя ваттмеrра
при измерении активной мощности нагрузки, имеющей
доступную нулевую точку. Включение обмотки напряже­
ния ваттметра при измерении реактивной мощности на
замененное напряжение показано сплошными линиями.
Нетрудно видеть, что в рассматриваемом случае за­
мененным напряжением по отношению к фазному на­
пряжению Ил будет линейное напрнжение И вс. Действи­
тельно, из векторной диаграммы, изображенной на
рис. 12.12, 6, видно, что вектор линейного напряжения
288
Uвс отстает 11а 90° от вектора фазного напряжения Vл,
nодключаемого к обмотке напряжения ваттметра при из�
мерении активной мощности (рис. 12.4, а).
г-·1'
А
1
.,.
PW
в
с
о
Uвс
r
Uв
а)
о)
Рис. 12.12. Испо.rn,зование ваттметра для измерения реактивноi! мощ­
ности в трехфазной трехпроводпой цепи при полной симметрии.
а - схема вклю,1ения; 6 - векторная диаграмма.
но:
Показание ваттметра в рассматриваемом случае рав­
и:;;:--/л) = Uл l
Pw = Uвс lА cos (
= Uл lл sinqJ.
д
cos (90° - q1) =
(12.12)
С учетом (12.11) находим, что для получения реак­
тивной мощности всей цепи необходимо умножить поr<а�
т.е.
зание ваттметра, опреде.1Jяемое (12.12), на
Q = VЗPw
= -VЗV д lлsin(p.
Vз,
Следует отметить, что незначительная асимметрия
токов в трехфазной цепи приводит при применении мето­
да одного прибора к большим погрешностям, поэтому
метод одного прибора для измерения реактивной мощ­
ности в трехфазной цепи применим то.r1ыю в лаборатор­
ной практике.
Измерение реактивной мощности методом двух при­
боров. Это измерение применяется в трехфазной трех­
проводной цепи как при симметрии, так и при асиммет­
рии токов.
Рассмотрим схему включения двух однофазных ватт­
метров PW1 и PW2 в трехфазную трехпроводную цепь
(рис. 12.13), предполагая для упрощения, что то1ш сим­
метрич:ны. Для удобства рассмотрения на рис. 12. 13, а
289
штриховой линией показано включение обмоток наnря◄
жения ваттметров PW 1 и PW2 в случае применения их
для измерения активной мощности в соответствии со
схемой рис. 12.7, а.
При измеренип активной мощности на обмотку на
пряжения ваттметра PW 1 подавалось линейное напря•
жение Vлв. В соответствии со сформулированными вы"
◄
А
,-
1
.,,
"
о
в
с
1
..
L-
PWf
·Х
R
а)
Рис. 12.13. Использояаи11е двух ваттметров д.�я измерения рсактивноii
мощности в трехфазной трехпроuодиой цепи.
а- схема вкпю,1ення; 6 - ве1<1орная диаграмма.
ше правилами теперь на обмотку напряжения ваттмет­
ра PW 1 необходимо подать напряжение, отстающее от
напряжения Vлп на 90°. Нетрудно видеть ( см. рис.
12.13, 6), tIТO та1шм напряжением будет фазное напря­
жение -Uc.
Проведя аналогичные рассужд�1шя, нетрудно пока­
зать, что на обмотку напряжения ваттметра PW2 необ­
ходимо подать вместо линейного напряжения Исп фаз­
ное напряжение Vл (см. рис. 12.13, 6). Следовательно,
при включении однофазных ваттметров дJIЯ измерения
реактивной мощности в трехфазной трехпроводной цепи
необходимо иметь фазные напряжения Vл и Vc. Для
по.ТJучения этих напряжений создается схема с искусст­
венной нулевой точкой.
Обычно д,ТJЯ создания схемы с искусственной нуле­
вой точ1{0Й испо.ТJьзуются сопротивления цепей напря­
жения применяемых однотипных ватrметров и резистор
R (см. рис. 12.13, а), сопротивление которого должно
быть равно сопротивлению цепи напряжения ваттметра.
Нетрудно видеть, что теперь на обмотки напряжения
ваттметров PW2 и PW 1 соответственно поданы фазные
290
напряжения ИА и И с, причем на обмотку напряжения
ваттметра PW2 подано напряжение Ил со зиа1юм плюс
(зажим обмотки напряжения, обозначенный звездочкой,
включен на фазу А), а на обмотку напряжения ватт­
метра PWJ - напряжение И с со зна1<ом минус (зажим
обмотки напряжения, обозначенный звездочкой, под­
ключен к искусственной нулевой точке О).
Определим показания ваттметров:
Piv1
= (-Uc)lл cos(-Oc:t);
(12. 1 3)
(cJл,Jc).
(12. 1 4)
Pw2 =Ил / с cos
Из векторной диаграммы (рис . 12.13, б) следует:
(-Ос)л ) = 60" - ());
(О
( 1 2.15)
(12.16)
с) = 120" -()).
Подставляя (12.15) и (12. 1 6) в (12.13 ) и (12.14), по­
лучаем:
P w, = (-Uc) lл соs(б0° -<J)) = U Ф /Фсоs (60" -())); (12. 1 7)
PW2 =Ил lccos(l20° - ())) = U Ф /Фcos(120° -<J)). (1 2.18)
Найдем алгебраическую сумму rюказаний ваттмет­
ров:
°
Pw 1 P,r12 = U Ф /Ф[соs(бО" -())) cos ( 1 20 -<р)].
После несложных преобразований получим:
PJ:. = Pw1 -I-Pw2=V3VФ/Фsin(J).
(12. 19 )
Анализируя выражение (12.19), видим, что для полу­
чения реактивной мощности всей цепи необходимо выражение <12.19) умножить на
+
+
Vз:
Q = VЗP'f. = Vз (VзVФ/Фsin(J)) = ЗUФ/ФsinQJ,
т. е. реактивная мощность всей цепи равна сумме реак­
тивных мощностей всех трех фаз.
Необходимо отметить, что в рассматр�,ваемом слу­
,;;ае при угле q;=30° (cOS())=0,86) показаttт-1е ваттметра
PW2 в соответствии с (12.18) равно нулю:
Pw2 = UФ /Фros (120° - 30° ) = U Ф /Фсоs 9 0° = О.
При угле ())<30° (co s q;�0,86) показание ваттметра
PW2 имеет знак минус.
291
Очевидно, что схема, изображенная на рис. 12.13, а,
пригодна и для включения двухэлементных варметров,
выпускаемых промышленностью для измерения реактив­
ной мощности в трехфазных трехпроводных цепях. Кон­
структивное оформление таких варметров полностью со­
ответствует конструктивному оформлению рассмотрен­
ных ранее (см. § 12.2) двухэлементных ваттметров, а
необходимость умножения суммарного вращающего мо­
учтена при его градуи­
мента та1юrо варметра на
ровке.
Измерение реактивной мощности методом трех при­
боров. Измерение реактивной мощности с использова­
нием метода трех приборов применяется в трехфазных
четырехпроводны.х цепях как при симметрии, та1< и пр.и
асимметрии токов. Кроме того, метод трех приборов мо-
Vз
UА
А
*
..
lд
PWf
8
N
Иве
l
с
Uв
11.
а)
5)
Рис. 12.14. Использование трех ваттметров для измерения рсактt111ной
мощности в трехфазной чстырехпроводно!i цепи.
а - схсмd вкл1оче1rnя; 6 - векторная диаrрамьtа.
жет быть использован и при измерении реактивной мощ­
ности в трехфазной трехпроводной цепи как с симмет­
ричными, так и асимметричными токами.
На рис. 12.14, а показано (сплошными линиями)
включение трех ваттметров PW 1-РWЗ для измерения
реактивной мощности в трехфазной четырехnроводной
цепи. Для удобства анализа схемы включения ваттмет­
ров для измерения реактивной мощности на этом же ри­
сунке показано ш<лючение трех ваттметров (штриховые
линии) для измерения активной мощности. Нетрудно
видеть, что при измерении активной мощности на обмот­
ки напряжения ваттметров PW 1-РWЗ соответственно
подавались фазные напряжения Uл, Uв и Uc.
В соответствии с правилами включения ваттметров
для измерения реактивной мощности на обмот1<И напря292
жения этих ваттметров надо подать напряжения, отста­
ющие на 90° . Таки-ми напряжениями в соответствии с
векторной диаграммой рис. 12.14, 6 будут линейные на­
пряжения Иве, Uсл и U1,в (для упрощения векторная
диаграмма построена для полностью симметричной трех-­
фазной цепи).
Определим показания ваттметров:
Pvn
= Vвс 1А cos (и-;;;;)А) = Uл /л ccs (90 ° - QJ) =
= U,J л sinQJ;
(
P1v2 = ИсА lвcos UcA,
/...........lв)\
= U;л lл cos(90 ° -QJ) = Uлlл sinQJ;
Р1-,у.з = И Ав lс соs(И:В) с)= Ил / лCos(90 -QJ) =И л I л sin (J).
Следовательно, алгебраическая сумма показаний
ваттметров
Рт.= Pw1 + P1v2 + Рwз = ЗИл lл sinqJ.
(12.20)
°
Разделив ( 12.20) на
ность трехфазной цепи:
Q=
рт.
Vз =
ЗUл / л siп<р
"Vз
Vз, получим реактивную мощ­
=
у·-3 Uл /л st.n(jJ = ЗUФ /ф SIП. (jJ.
В за1<лючение необходимо отметить, что включение
элементов выпускаемых промышленностью варметров
для измерения реа,пивной мощности в трехфазной цепи
полностью соответствует схеме рис. 12.14, а.
Конструrщия трехэлементных варметров соотвrтству­
ет конструкции трехэлементных ваттметров, а необхо­
димая математическая операция, связанная с деление�1
на J/3, учтена при градуировке варметров.
12.5. ЛАБОРАТОРНАЯ РАБОТА № 10.
ИЗМЕРЕНИЕ МОЩНОСТИ В ТРЕХФАЗНОЙ ЦЕПИ
ДВУХЭЛЕМЕНТНЫМ ВАТТМЕТРОМ
Задание
1. Ознююм11ться с nр11борам11, nред11азначенными для выпол­
нени я данной J1абораторной работы. Внести в nротокоJ1 их паспорт­
ные данные.
2. Собрать схему, изображенную на рис. 1215, обратив особое
внимание на правиJ1ьность В1<J1ючения генераторных зажимов ватт­
ыетров.
293
3 Определить постоянные применяемых лабора-rорных ваТТNет­
Р.РВ по формуле
Сном = Ином lrюм/аш,r,
где Uпом - номина,1ыюе значение напряжения испоJIЬзуемоrо диа­
пазона ватт:ме·rра. lnoм - номинальное знаLJение тока выбранного
диапазона ваттметра; аш,, - чис.qо де.11ений шкаJ1ы ваттметра
4 Произвести измерение мощности при симметри•шой активной
.наrр}зкс (cos <р= 1) тремя способами.
Рис. 12 15. Схема вю1ючения приборов для измерения
мощнос'П! в трехфазной rре}(лроводно11 uenи.
активной
а) с помощью во.%т.>1етра и амперметров:
р' =V3U1JA;
здесь V ;, - показание вольтметра, включенного па фазное напря­
жение; lл - показание амперметра, измеряющего линейный ток;
б) с помощью двух однофазных ваттметров:
+
Р" = Pw1
Pw1,
где Pw, и Рw2 - nоказа11ия однофазных ваттметров Р\171 и PW2;
Pw1 = сномl a l ;
Pwz = Cf,o\'/2 а2 ,
здесь а, и а2 - отс<1еты в делениях по шкапам однофазных ватт­
метров;
в) с помощью двухэJ1ементноrо ваттметра Р\173:
Р = Сномзав,
где аз - отсчет в де.1еннях ло шкапе двухэ.qементного ваттметра.
Ес.qи испо.qьзуется щитовой двvхэ 1ементный ваттметр с rpa •
дунрованной шкалой, то Р� опредеJ;яется непосредственно по шка­
ле прибора в ваттах или ки.1юваттах.
"'
294
5. Сравни ть полу11ен11ые значения Р', Р" и Р"', обратив внима•
ние на удобство измерения активной мощности двухэлементньщ
ваттметром, нс требующим предварительных арифметичееких вы·
числений.
6. Произвести измерение активноН мощности при симметрпчной
реактивной и аrрузке (cos q, =I= 1) двумя способами:
а) с помощью двух однофазных ваттметров;
б) с nомошыо двухэдементноrо ванметра.
ДJ1я nОJ1учения реактивной нагрузки необходимо включить па·
кетный выключате.�ъ SA в схеме, изображенной на рис. 12.15.
При определении активной моuа,ости с помощью двух одно•
фазных ваттметров СJ1едует nомн,,ть (§ 12.3), что в зависимости от
угла q, и его знак,1 показания одного из 1Jа1тметров могут быть о·r­
рицате.%ными илн вообще равными нулю. Независимо от этого для
получения общей мощности всегда необходимо брать алгебраичес­
кую сумму показаний ваттметров.
7. Сравнить резу.%таты, по.�учепные при выnо.�ненни n. 6, а
и 6, б.
8. Составить отчет по требуемой форме.
ГЛАВА ТРИНАДUАТАЯ
ИЗМЕРЕНИЕ ЭНЕРГИИ
13.1. ОБЩИЕ СВЕДЕНИ51
Измерение активной и реактивной энергии в одно­
фазных и трехфазных, трехпроводных и четырехпровод­
ных uепях переменного тока может быть проведено с по­
мощью спеnиальных интегрирующих электроизмери­
тельных
приборов - однофазных
и
трехфазных
электричес1шх счетчиков.
Как правило, в СССР все применяемые в быту и
промышленности электрические счетчики основаны на
использовании индукционного измерительного меха­
низма.
Технические требования к индукционным счетчикам
регламентированы ГОСТ 6570-75. Проверка правильно­
сти показаний счетчиков электричес1<0й энергии произ­
водится методами и средствами, предусмотренными
гост 14767-69.
13.2. ОДНОЭЛЕМЕНТНЫй ИНДУ(ЩИОННЫй СЧЕТЧИ((
Одноэлсментный индукционный счетчик используется щ1я уче­
та активной энергии в однофазных цепях переменного тока (в СССР
учет реактивной энергии в однофазных цепях переменноrG тока в
виду малости реактивной нагрузки не производится).
295
В техю1ческоi1 литературе электрические счетчики, предназна­
>Jенные ДJ!Я учета энерrшr в од1юфазных цепях перемешюrо то,,а, на•
зывают однофазными счетчиrшми.
В "ачестве вращающего элемента од:-�офазноrо счетчика исполь­
зуется индукционный измерительный меланизм. Принцип действия
механизма основан на взаимодействии двух или неско.%ких перс­
ме11ных магнитных потоков с токами, индуцированными имн в под­
вижном алюминиевом дис1<е. Можно показать, что возникающий в
JIНдукционном из�.1еритедыюм механизме вращающий момент М ра­
вен:
(13. 1)
rде Ф1 и Ф2 - п0101ш, пересекающие алюмншrевый диск; f - часто­
та изменения потоков Ф1 и Ф2 ; ф - угол фазоnоrо сдвига между
потоками Ф, и Ф2.
Ана11изируя выражение (13.1), следует отметить, что:
Рис 13.1. Однофазный индукшюпный счет•шк.
1) для созда1!Ия вращающего моыента необходимо не менее
двух переменных потоков или д.вух состав.!)ЯJОЩИХ с..1.ного потока,
имеюших фазовый сдвиг и смещенных в пространстве;
2) вращающий момент достигает своего максимального значе­
ния, когда фазовый сдвиr между потоками Ф, н Ф2 равен 90"
(siп,P = !);
3) вращающий момент зависит от qастоты изм�иення потш,ов
Ф, 11 Ф2 .
Рассмотрим принцип работы и устройство однофазного индук­
циошюrо счетчика. На рис. 13.1 схемати•mо показано устроиство
296
широко распространенного индукционного счетчика типа СО (счет­
чю< однофазный); /- трехстержневой магнитопровод с обмот1<ой
цепи вапряжения; 2 - Г.-образный магнитопровод с двумя после­
довательно соединенными токовыми обмотками; 3 - аJ1юми1шевый
диск, жестко укрепленный на ос11 подвижной части; 4 - противо­
ПОJIIОС из МаГIUJТОМЯГl(ОГО материа.!Jа; 5 - стальной поводок ДJ!Я
создания и реrуJ111ров1ш компенсационного момента; 6 - постоян­
ный магнит для создания тор­
и
мозного момента; 7 - корот1<0замкнутые витки; 8 - обмот1(а, замкпу·rая на проволочный
Фr.
резистор 9 с регулируемым
сопротивлением;
10- ста,1ь­
ной крючок; / 1 - пластина с
флажком,
выПОJIНенные из
материада;
маrнитомяrкоrо
/2-счетный механизм; 13 перемычl(а д11я изменения со­
протнвления резистора 9.
На рис. 13.2 приведена
-�
Рис. 13.2. Векторная диаграм­
ма однофазного с•1етчика.
упрощенная векторная днаrра�1ма, поясняющая принцип работы
счетчика. Напряжение V, при.'lоженное 1( обмотке напряжения, на­
ходящейся на средне�! стержне магнитопровода / (см. рис. 13.1),
вызывает в обмотке ток /r;, отстающий по фазе от напряжения И
ввиду бо.1\ьшоrо реа1,тивноrо сопротивления обмоТl<И на угол,
близкий к 90°. Ток / и создает магнитный поток Ф в среднем
стержне магнитопровода 1. Поток
делится на два потока - по­
ток Ф{1 и поток Фr,. Рабочий поток Фи пересекает диск 3 и замыка­
ется через противополюс 4. Нерабочий поток ФL замыкается через
боковые стержни магнитопровода / и непосредственного у•1аст11я в
создании вращающего момента счетчика не принимает. Потоки Фи
и Фr. отстают от тока lu на углы потерь аи и ur. Угол au>aL,
так как поток Фи пересекает диск 3 и проходит через противопо­
J1юс 4, в которых возникают допоJ111иwлы1ые потери. Ток l создает
в магнитопроводе 2 магнитный поток Ф1, 1юторый дважды пересе­
кает диск 3 и проходит через нижнюю •1асть среднего стержня
магнитопровода /. Поток Ф, отстает от тока 1 на угол а,. Та­
ким образом, диск пересекают два несовпадающих в пространстве
и имеющих фазовый сдвиг магнитных потока, т. е. Фи и Ф,, при­
чем поток Ф 1 пересекает диск дважды. Возш11{ает вращающий мо­
мент М. Выражение (13.l) для этого случая принимает вид:
(13.2)
М = с/Фи Ф1 siп ,р.
При работе на линейном участке кривой намагничивания маг•
нитомяrких маrериалоn магнитопроводов нмеем:
(13.3)
19-970
297
rде zu - модуль полного сопротивления обмотки цепи напряжения.
Ввиду малости активного соnротнвления Rи обмотки напряже­
ния по сравнению с реактивным сопротивлением Хи этой обмот�-.н
можно считать, что
(13.4)
где Lu - индуктивность обмо·rки напряжения.
Учитывая ( 13.4), приводим выражение ( 13.3) для потока Фи к
виду
здесь kз = 1½/2nfLu.
Подставляя значения потоков Ф 1 и Фи в ( 13.2); l,l()JJ)'Чaeм:
М = kUJ sin 'Ф,
(13.5)
где k = ck,kз.
Анализируя (13.5), видим, что вращающий момент счетчика
пропорционален актнв!-'ой мощности при выпо.�а1ении равенства
sin '1J = cos rp,
(13.6)
rде ip - уrол фазового сдвига между напряжением И и током /.
Извес1 но, что синус какого-либо уrла равен косинусу другого
уrла тот,1ю
тогда, когда эти уГJ1ы яв.чяются дополнитеJ1ь11ыми, т. е.
'Ф+�р = 90° . Нетрудно видеть (рнс . 13.2) , что в рассматриваемом
слу•1ае д.т�я выполнения этоrо условия необходимо иметь угол �>
>90\ так как 13 = ,p+(J!+a1.
Наличие относительно большого нерабочего потока ФL позво­
ляе-� получать уrол 13>90° (в реа.%ных конструкциях счетчиков
поток ФL существенно больше рабочего nото1<а Фи). Обеспеченне
равенства -ф-г(J! = 90° при заданном угле 13>90° осуществляется
11утем изменения yrJ1a потерь ar с помощью короткозамкнутых вит­
ков 7 (rрубая регулировка) и обмоты1 8, замкнутой на резистор 9,
1'Оторый выполнен в виде петли, с регу.чируемым соnротивление,r
(п.чавная реrую1ровка). Изменение сопротивления резистора 9 про­
изводится путем перемещения контакта 13 (см. рис. 13.1). Таки,�
образоll!, при выполнении равенства (13.6) выражение (13.5) при­
нимает вид:
М = kUJ cos ip = kP.
(13. 7)
Д11я создания тормозного момента и обеспечения равномерной
угловой скорости диска при 1<аж.дой да11ной нагрузке служит по­
стоянный магнит б. При пересечении вращаюшнмся диском пот01,а
постоянного магнита Ф,. (см. рис. 13.1) в диске наводится ЭДС и
возникают токи J.,, nроnорцrюнальные потоку Ф" и угловой ско­
рости диска (J):
(13. 8)
lм=с1 Фм(J),
От взаимодействия то!(а Т" с потоком Фм возникает тормозной
мо�1ент Мт,
( 13. 9)
298
Подс тавив значеRНе [,. из (13.8) в (13.9), получим:
,М,Е = Сs <и,
(13.10)
1'де cJ=c,c/�,EcJ1и пренебречь трениеы и другими дополнительными тормоз­
щ,1ми моментами, возни1,ающими при пересечении диском потоков
Фи и Ф1, то равномерная уrJювая скорость диска будет иметь место
при М=Мт, Приравнивая (13.7) и (13.10), и111еем:
kP=c8 ы=c3 da/dt.
(13.11)
Вuражение ( 13.11) можно представить следуюuщм образом:
kPdt = С3ОО.
(13 .12)
Интегрируя (13.12) по времени от t1 до t2, получаем:
k
t,
t,
t,
t,
j Pdt = с3 j da.
t,
Нетрудно видеть, что J Pdt = W - активная энергия, учтенная
t,
t.
счетчико:-,1 з& время от t1 до t2, и J da = 2т,.N, где N - число обоt,
ротов диска за время от t1 до t2, тогда kW=cs2-лN, откуда W=
=Cз 21tN/k=CN. Следовательно, число оборотов диска пропорцио­
нально учитываемой счетчиком актнвноii энергии.
Для учета •шсла оборотов диска в счетчиках устанавливается
счетный механизм 12 (см. рис. 13.1). Число оборотов диска счЕТ·
чика, приходящееся на единицу учитываемой счетqиком энергии, на­
зывают передаточным числом счетчика. Передаточное чисJJО счет­
чика указьmается на щитке сче·rчика. Например:
1 кВт-ч = 2000 оборотов дисl(а.
Величина, обратl-!ая передато•шому числу счетчика, т. е. эпергия,
учитываемая счетч.иком за один оборот д»ска, называется номи­
иальной постоянной счетчика Cuo><, Для счетчrша с указанным выше
передаточным чисдом номюrаJ1ьная постоянная Свом определяется
следующим образом:
Сном = 3600, 1000/2000 = 1800 Вт-с/оборот.
Зная С11ом 11 число оборотов диска счетчика за данный интер­
вал времени, не1рудно определить учтенную счетчиком за этот
интервал времени энерn1ю:
(13 .13)
\V = Сном N.
Существенное влияние на nравиш,ность показаний счетчика при
малых нагрузках (при малом значении тока /) О1<азывает момент
трения в счетном механизме и опорах подвижной части счетчика.
Очевидно, что момент трения, действующий навстречу вращающему
моменту, будет уменьшать угловую сrюрость диска и учтенная счет­
чиком э:iергия будет меньше израсходованной. Для уменьшения по­
грешности счетчика от действия момента трения с помощью специ­
альных прнспособ:1ений во всех типах счетчиков создают дополни-
299
тепьнь111 uращающий момент. Этот момент называют компенсацион­
ным моментом. Наибольшее распространение получили три способа
создания компенсационного момента:
1) с помощью винта из магнитомягкого материала, ввернутого
в проrивопо,.r�юс под диском счетчика;
2) с помощью короткозамкнутого витка, помещаемого на пути
потока Ф,1 над дис.1юv1 счетчиы1;
3) с помощью повuдка 5 (с11 рис. 13.1), прикрепленного к
противопотосу под диском счетчика.
Независимо от способа поJ1учения компенсационный момеt1т
во.шикает в результате взаимодействия двух 1ми нескольких пото­
J\ОВ, создаваемых обмоткой напряжения и сдвинутых оrноситеJ!ЬНО
друг друга в пространстве и по фазе, с токами, наводимыми иьш в
диске счетчика. При наличии поводка компенсационный момент
соJдается rютока1,,ш Фи и Ф8• Поток Ф8 замыкается через ш,астину
с флажком 11, вьшо,шенную из маr:штомяпюго материаJ1а, и про­
тивополюс 4. Если поводок расположен по радиусу диска, то си.�а.
возникающая в результате взаимодействия пото,юв Фи и Ф8 с то­
ками, наведенными ими в диске, действует также в направ.�ении ра­
диуса и дополнительный вращающий (1юмпенсационныii) момент
отсутствует. При смещении ловод"а возни"ающая сила создает до­
лолните.1ьный вращающий момент, компене11рующий момент трения.
Известно, что момент трения явJ;яется веJшчиной переменной,
зависящей от угловой скорости подвижной части. Компенсационный
ъюмент прн неизменном зна•1ении напряжения U и данном смещении
поводка является величиной пос1·ояююй. С11едовательно, равене1во
компенсационного момента моменту трения может быть выполнено
при одной вполне определенной нагрузке. ОGычно равенство этих
мо�1ентов осуществляют при регулирuвке счетчика при токе /, при­
мерно равном 10% помина,qьноrо тока /,10м.
При эксш,уатацюr счетчика в ряде случаев компенсационный
момент превышает момент трения и диск счетчика начинает вра­
щаrься даже при ток� l=O, т. е. когда потребитель энергию не рас­
ходует.
В соответстоии с ГОСТ 6570-75 вращение диска счетчика под
действие,� напряжения, лодаппого на зажимы лараJ1лельной цепи,
и при отсутствии тока в rюследовательноi1 цели называется самохо­
дом. Для устранения самохода на оси диска прикрепляют крючок
10 (с111. рис. 13.1) из ферромагнитного материала. Флажок 11 на­
магничивается потоком Ф8 и, притягивая крючок 10, устраняет са­
моход. Такнм образом. теперь, даже тогда, когда компенсационный
момент больше момента трения. диск счетчика при токе 1=0 не
совершаеr более одного оборо,-а, что в соответствии с ГОСТ 6570-75
считается отсутствием самохода.
Сила взаимодействия между крючком и флажком должна быть
отреrу,qирована так. чтобы счетчик обладал допустимым порогом
чувспзнте11ьности. Под порогом чувствительности счетчика понима­
ют наименьшее нсрмируемое значение тока / в процентах /,юм, при
котором начинается непрерывное вращение диска счетчика при ноьш­
иа.чьных значениях напряжения и частоты и при cos fP= 1.
На работу счетчика вт1яют многочисленные факторы, обуслов­
ленные конструкцией счетчика, качеством изготовления деталей, ма­
териа,1ом детаJiей 1, т. д. По точности учета электроэнергии счетчи­
ки а1<тивной энергии могут быть следующих классов точности: 0,5;
J,O; 2,0 и 2,5. В отличие от аналоговых показывающих приборов
300
классы точности счетчиков определяются не по приведенной, а по
относительной погрешности, определяемой при различных оговорен­
ных ГОСТ 6570-75 нагрузках. Допускаемую относительную погреш­
ность с11етчика в процентах определяют по формуле
wСЧ -w 100
(13.14)
•
\17
где Wсч - значение электрической энергии, определенное по пока­
заниям проверяемого с 11етчика за данный интервал времени; W действительное значение электрической энергии, оnрел.еленное за
этот же ю1тервал времени по показаниям образцовых приборов.
В качестве образцовых
ириборов используются ли­
ff, О/о
бо
образцовый
с•rет•шк
Гl
IЛ
( счетчик, имеющий бо.11ее
высокий класс), либо ватт­
метр и секундомер.
Характерное изменение
основной оnюсительной поб=
ш
Рис. 13.3. Нагрузочная кри­
вая ол.нофазноrо индукци•
ошюго счетчика.
грешности с11етчика в зависимости от нагрузки представлено иа рис.
13.3. Обычно кривую, изображенную на рис. 13.3, называют нагрузоч­
ной кривой счет,шка. На наrрузо•шой кривой мож1ю выделить четыре
характерные области изменения относительной погрешности.
В области / нзменение б обусловлено превышением компенса­
ционного момента иац моментом трения. В этой области диск счет­
чика вращается быстрее необходимого.
В об11асти 1/ из-за увеличения момента трения в связи с уве­
.1и•1ением угловой скорости диска компенсационный момент мень­
ше момента трения и диск счетчика вращается медленнее не0бхо­
J'Имоrо. Равенство компенсациошю1·0 момента моменту трения (б=
=О) обесnе•швается примерно при токе нагрузки счет11ика ///по,,=
=10%.
В об.Р.асти 1// происходит непрерывное увеличение угловой с1<0рости дисI<а по сравнению с необходимой скоростью. Это обуслов­
JJено нелинейной зависимостью между тоI<ом / и потоком Ф 1 на
начальном участl{е кривой иамаrничивания материала магнитопро­
вода токовой цепи.
В области IV происходит постепенное уменьшение угловоii Cl(O·
рости дисl(а по сравш�нию с необходимой скоростью. Это объясня­
ется пепроnорциоиальиым возрастанием тормозно1'0 момента счет­
'IИКа. Все большее влияние на 11инает оказывать составляющая тор­
мозного момента, обусловлеt1ная пересечением диска счеrчика
увеJIИ'IИВающимся потоком Ф1.
ta.3. ДВУХ- И ТРЕХЭЛЕМЕНТНЫЕ
ИНДУIЩИОННЫЕ СЧЕТЧИКИ
Двухэлементные счетчиI<и испоJ1ьзуются для учета активной
энергии в трехфазных трехпроводных цепях персме1-шоrо тока.
301
Трсх'>лементиыми счеТ'!икамн учи·1ывается активная и реактивная
энергии в трехqJазных •1етырехnроводиых цепях nеремеииоrо тока.
Кроме тоrо, трехэлементные счет•1ики применяются также для уче­
'J а реактивной энергии в трехфазных трехnроводных цепях перемен­
ного тока.
В ка•rестве вращающих элементов как в двухэлементных, так
и в трехэлементных счетчиках используются вращающие элементы
одноэлементных индукционных с•rетчиков, Описание такого враща­
ющего элемента приведено в § 13.2.
Как в двухэлементных, 7ак и в трехэ:1емеюиых счетчиках дис­
ки вращающих элементов укрепляются на од.ной оси. Это позволяет
nоJ1у11ать общий вращающий
мо�ент по:�,виЖ11ой части счет­
11
чика, paвнr,rii алгебраической
сумме вращающих моментов
отдельных элементов. Та1шм
�===$==
образом, независимо от количе­
ства применяемых вращающих
элементов в с•1ет•1иках устанав­
ливается один счетный меха­
низм.
,J
а;
L!
Рис. 13.4. Конструктивное вы­
полнение с•rет�:иков.
а - J\1\ухэлемснпюrо;
ментноrо.
б- -rрехэле-
На рис. 13.4, а показано принцнпиальное конструктивное вы­
nолненне двухэлеМеН'fного счетчика, а на рис. 13.4, б- трехэлемент­
ного счетчика.
Двулэ.1емеитные о;щодисковые и трехэлеыентные двухдисковые
::четчи1ш nра1<т11чески не применяются из-за уве.ттичеиия погрешно­
стей счетчиков всJ�едствие в.1иянин вращающих э.1еме11тов друг на
друга.
Для двух- и трtхэлементных счетчиков введЕ'ны с.ледующие
обоэначеннн:
СЛ3 -- счетчики для учета активной энергни в трехфазной трсх­
проводноii: цепи;
СА4- счетчики д.ля учета а1,."Тивной энергии в трехфазной •1е7Ырсхпроводной цепи;
СР4 - счет•шки д.ття учета реактивной энергии в трехфазных
трех- и четырехнроводных цсш1х.
В некоторых с.лучанх к обозначению счетчн1<0в добавлнется
буква У - универсальный. Например: СА3У, СА/4.У, СР4У. Эти счет11и1ш предназначены дщr работы с измерительными трансформато­
рами тока и измерительными трансфор:маторами напряжения с лю­
быми коэффициентами трансqюр�1а11ин.
Счет•шки дл11 учета реакт1ш1юй энергии могут быть классов
точности 1,5; 2,0 и 3,0. О классах точносrи счетчиков длн у11ета
а((rивиой энергии сы. в § 13.2.
13.4. СХЕМЫ ВКЛЮЧЕНИЯ СЧЕТЧИКОВ ДЛЯ УЧЕТА
Al(TИBHOh И РЕАКТИВНОЙ ЭНЕРГИИ
Включение вращающих элементов счетчиков для
учета как активной, так и реактивной энергии произво­
дится по схемам включения ваттметров для измерения
активной и реактивной мощности ( см. гл. 12).
Геtrераторные зажимы токовых обмоток счетчиков
обозначаются бу1шой Г, а зажимы, к которым подклю­
чается нагрузка, - буквой Н. Зажимы обмоток напря­
женпя счетчИI{ОВ, предназначенных для включения в
трехфазные трех- или четырехпроводные цепи, обозна­
чаются цифрами 1, 2, 3 и О.
Промышленностью выпусн:аются счетчики трех раз­
новидностей: счетчики непосредственного включення,
трапсформаrорные счетчики и счетчики трансформатор­
ные универсальные.
Трансфорыатор11ые счетчитш предназнач�ны для
включения через измерительные тrансформаторы, име­
ющие опреде.1.енные, наперед задаrшые коэффициешы
трансформации.
Трансформаторные универсальные счетчики предна­
значены для включения через измернтельные трансфор­
маторы, имеющие любые коэффициенты трансформацнн.
Рассмотрим наиболее распространенные схемы вклю­
чения счетчиков.
Схемы вкдючения однофазных ( одиоэлементных)
счетчиков. В СССР в однофазных цепях учет реа�пивной
энергии не производится, поэтому ниже приведены схе1\!Ы включения одноэлементных (однофазных) счетчиков
для учета активной энергии.
Еа рис. 13.5 изображена схема расположения зажи­
мов и присоединения к ним обмоток однофазного счет­
чика непосредственного вюrючения.
На рис. 13.6 приведена схема расположения зажи­
мов и присоединения к пим обмото1{ однофазного тран­
сфор:¼аторноrо или трансформаторного универсального
счетчнков. Совершенно очевидно, что счетчик, Вiшючение
которого по1шзано на рис. 13.6, может быть включен и
через один какой-либо измерительный трансформатор,
трансформатор тока ИJIИ трансформатор напряжения.
Схемы ш<лючения трехфазных двухэ.11ементных счет­
чююс. Включение вращающих элементов дэухэлемент­
ных счетчиков, предназначенных для учета активной
303
энергии в трехфазных трехпроводных цепях, произво­
дится по схемам Вt{лючения двух ваттметров для измере­
ния активной мощности.
Как известно ( см. § 12.3), включение ваттметров для
измерения активной мощности в трехфазных трехпро­
водных цепях производится по методу двух приборов.
Рис. 13.5. Схема включения
одиофазного С¾е тчнка.
Рис. 13.6. Схема включения
·rрансформаторноrо
универ­
сального однофазного счt'Тчика.
На рис. 13.7 изображена схема расположения зажи­
мов и присоединения I{ ним обмоток трехфазного двух­
элементного счетчика типа САЗ непосредственного вклю­
чения, на рис. 13.8 трехфазного двухэлементного транс­
форматорного или трансформаторного универсального
счетчика в c.riyчae ВJ{Лючения его то.JJько через измери­
тельные трансформаторы то1<а. Используя схему вклю­
чения обмотки напряжения счетчика через измеритель-
1
А
в
2
г н г н
с
Рис. 13.7. Схема включения
счетчика типа САЗ.
304
11
н
с
И2
в
112
Рве. 13.8. Схема вклю•1сния
счетчИRа типа СА3 с использо­
ванием измерите.'!Ьных транс­
форматоров тока.
ный трансформатор напряжения (см. рис. 13.6), нетруд­
но состав ить схему расположения зажимов и присоеди­
нения к ним обмоток трехфазного двухэлементного
трансформаторного или трансформаторного универсаль­
tюго счетчиl{а в случае применения как измерительных
трансформаторов тока, так и измерительных трансфор­
маторов напряжения.
Схемы .в1iлючения трехфазных трехэлементных счет­
чиков для учета активной энергии. Трехфазные трех,..
1-
А·..с.Г г<>1
в
с
N
нг
)о)
2
.....
)
Нг )-<Э'
,..
'""
но
г1
-
�>-t-
Рис. 13.9. Схема вклю11ения
счет•шка типа СА4.
АГ
Нг 2
Нг 1
Иt И2
в л,-п2r"
11,
с
N
но'
,--
И2
/'kп
Л1
И2
112
Рис. 13.10. Схема вклю11е11ия
счетчика типа СА4 с ислользо­
ваиием трансформаторов тока.
элементные счетчики применяются для учета активной
:1нерrии в трехфазных четырехпроводнь1х цепях.
На рис. 13.9 показана схема расположения зажимов
и присоединения к ним обмоток трехфазного трехэле­
менпюго счетчика типа СА4 непосредственного включе­
ния. Нетрудно видеть, что вращающие элементы счетчи­
ка включаются в трехфазную четырехпроводную цепь
точно так же, KaJ{ включаются три ваттметра д.ТIЯ изме­
рения в такой цепи активной мощности, т. е. применяет­
ся рассмотренный ранее (см. § 12.3) метод трех прибо­
ров.
На рис. 13.10 изображена схема расположения за­
жимов и присоединения J< ним обмоток трехфазного
трехэлементного трансформаторного или трансформа­
торного универсального счетчика в случае включения
его в трехфазную четырехпроводную цепь только через
измерительные трансформаторы тока. Нетрудно ви деть
что и в этом случае вращающие элементы счетчиков,
ВI<Лючаются в цепь по методу трех приборов.
305
Схемы вклю<1ения трехфазных трехэлементных счет­
чиков длn учета рег.ктиnнои энерrии. Трехфазные трех­
элементные счетчики для учета рею{тивной энергии ти­
пов СР4 и СР4У применяются в трехфазных трехпро­
водных и трехфазных четырехпроводных цепях пере!мен­
ного тока.
Вк:rючение врашающих элеrv�ентов счетчика произво­
ди-:·ся по правr�лам включения на замененные напряже-
:Г
!,:_с ___
Рнс 13 11. Схе'1а в1<люче­
ни<� счетчика т•mа СР4 в
трехфазную тре>.проводную
1..епь.
-
Рис. 13 12. Схс,1а включе,�ия с<1етчика типа
четыСР4У в
рехп о
трехфазн} ·о
р
вод11ую цепь.
­
ния ( см. § 12.4) обычных ваттметров в слу•1ае примене­
ния их для измерения реактивной мощности в трехфаз
ных цепях.
На рис. 13.11 приведена схема расположения зажи­
мов и присоединения I{ ним обмоток счетчика типа СР4
непосредственного ВI{лючения при измерении им рею{­
тивной энергии в трехфазной трехпроводной цепи.
На рис. 13.12 изображена схема расположения зажи­
мов и присоединения к ним обмоток трехфазного транс­
форматорного или трансформаторного универсального
(СР4У) счетчиl{а в случае измерения реактивной энер­
гии в 1рехфазной четырехпроводной цепи с при'11енени­
см измерительных трансформаторов тока и из:v1еритель­
ных трансформаторов напряжения.
◄
306
13.5. ЛАБОРАТОРНАЯ РАБОТА N.! 11. ПОВЕРКА
ОДНОФАЗНОГО ИНДУКЦИОННОГО СЧЕТЧИКА
Счетчики электрической энергии подлежат поверке в соответ­
ствии с ГОСТ 14767-69, который предусматриnает повер1<у счетчи­
ков электри<1еской энергии одним из след} ющих методов:
1) ваттметра и се1<ундомера, при котором определяют действи­
тельное значение элf:ктрической энерrии, вызвавшей вращение дис­
ка счетчиl(а на задаи.:ое vrc.10 оборотов;
2) образцового счетчи1<а, при котором показания поверяемого
счетчика сравнивают с показаниями образцового счетчика.
Независимо от выбранного метода применяемые образцовые
средства измерений долХ<.ны обеспечивать определение действитель1юrо значения энергии с погрешностью, ne превышающей 1/4 допу­
скаемой погрешности поверяемого счетчика.
Поверка счетчика должна нрсизво,:;.нться в нор:..tальиых усло­
сиях. Для счетчиков классов точности 1,0; 1,5; 2,0; 2,5 и 3.0 норPJ
н г
PW
Рис. 13.13. Схема поверки однофазного счет<ш1<а.
мальными считаются условия, при 1юторых отклонение счетчика
от вертикального положения не превышает 1°, отклонеи.-1е темпера­
туры окружающего воздуха не более чем на ±3° С от 20° С, откло­
иенJ<е напряжения пиrания с<1ет<JИl(а не более чем на ±1 % номи­
нального зиачf:ния налрнжения литания и т. д.
В данной работе производится частичная поверка однофазного
с<1ет�1ика активной энергии методом, предусматривающим примене­
ние ваттметра и секундомера.
Схема вклю<1ения приборов д.�я поверки счетчика изображена
на рис. 13.13. Она позволяет проверить счстч�ш на отсутствие са­
мохода, определить порог чувствительности сг1ет<шка и погрешность
его при разли,шых нагрузках, но при одном cos ip = 1. (Нагрузка
Rrraг имеет чисто активный характер.) При полной поверке счетчи­
ка в соответствии с ГОСТ 6570-75 определение norpeшнocтeir счет­
чика необходимо производить при различJJых нагрузиах ие только
при со.; <р= 1, но и при cos ip=0,5.
Задшше
1. Ознакомиться с прибора,ш, имеющн\!ИСЯ на лабораторном
стенде, внести в отчет нх паспортные данные
2. Собрать схему рис. 13.13, обратив особое вниманrе на пра­
вильность включения генераторных зажимов образцового ваттметра
PW и по1Jеряемоrо счет,шка Р!.
307
3. При заr(.юtутых ключах SA! и SA2 подать напряжение на
собра1rн}Ю схему и установить 110 вольтметру с помощью однофаз­
ного ре1·улятора напряжения Т номинальное напряжение Ином счет­
чи 1<а. Изменяя нагрузку Rвм, установить по амперметру номиналь­
ный ток lном счет•rика (U пом и lном с•1етчика указаны на его щитке).
Прогреть схему в теченне 15 мин.
4. Проверить счеrчик на отсутствие самохода. Для этого ра•
зомкнуть клю•1 SAJ и при 1=0 110 вольтметру с помощью регулято­
ра напрнжения Т установить напряжение питания счетчика равное
110% U11ом. Если при этом диск счетчика не совершает бо.!\ее одно­
го полного оборота, то самоход у счетчика отсутствует.
5. Определить порог чувствительности счетчика. Для этого с
помощью регулятора напряжения Т по вольтметру установить Ином
с•1ет•ш;<а, шmю•шть ключ SAJ и путем уведичения сопротивления
нагрузки R"ar получить минимально возможное показание амперМ(.'Т•
ра, при :пом диск счет•1ика должен быть неподвижен. Далее, ра­
зомкнуть ключ SA2 и ny·reм ПJ1an11oro уменьшения сопротивления
нагрузки R,шr добиться начала движения и непрерывного вращения
диска счет•шка. Внести в отчет значение тока /порог, определенное
по мнллиамперметру; замкнуть клю•1 SA2. Вьr<шслить значение тока
l па:,о,· е процентах / но,.,.
6. Определить относите.пr,ную погрешность счетчика прн И=
=Vпом и l=lnoм- Установка значения TOJ<a l" 0" осуществляется пу­
те,,1 И3мененин наrрузJ<н Rм:ll при зам1шутом J<люче SA2.
Относительная погрешность счет•IИJ(а в проце1нах опреде.пяется
по формуле
/) = Wсч - W 100 •
t\V
fl\e Wсч - зtrачение у'lтенной с•1етчико�1 энергии; W - действитель­
ное значение энерrии, определенное по образцовому ваттметру.
Для определения W'сч необходимо с помощью секундомера из­
меr,и1ъ время вращенпя диска счетчика при совершении N целых
оборотов. Число N выбирают таким, чтобы время t было не менее
50-60 с. ОпредеЖ'нис интервала времени t проводят 3 раза. За из­
мер.;нное значение lн берут среднее арифметическое значепие из
трех измеренпй. Зиа•1ение Wсч опредстнот по формуле
Wсч = Свом N,
где Сн ом - номинальная постоянная счстtJ11ка:
Сном= З600-1000/N0 ,
здесь No - передаточное •шсло счетчика, указанное на его шнтке.
Зна•1ение W определяют по форму:;е
W = P1v tи ,
где Pw - значение мощности, Вт, опреде.пенное по образцово111у
ваттметру:
P rv= с,юма;
здесь Сном - номинальная постояннан ваттметра (см. гл. 12); а отсчет по шкале ватт�1етра в делениях.
7. Используя имеющиеся в лаборатории выписки из ГОСТ
6570-7:j, rv:�.елать заклю•1еиие о допустимости определенных выше па-
308
раметров счетчика с учетом обозначенного на щитке проверяемого
счеrчика класса точности.
8. Составить отчет по требуемой форме.
13.6. ЛАБОРАТОРНАЯ РАБОТА .№ 12.
ИЗМЕРЕНИЕ АКТИВНОА И РЕАКТИВНОИ
ЭНЕРГИИ В ТРЕХФАЗНОИ ЦЕПИ
Ме1оды и приборы, лредиазначеню,rе для учета активной и ре•
активной энергии в трелфазиы х трехпроводных н чеrырехлроводных
целях, были рассмотрены в § 13.3 и 13.4.
В данной лабораторной работе учет активной и реактивной
энергии производится в трехфазной трехпроводной цепи. Длн у<Jета
активнои энергии используется двухэлеменrиъrй с11стчик типа САЗ.
Элементы этого счетчика 1ЗКЛ10•1аются JJ трехфазную трехпроБодную
цепь по схеме вк.ттючения двух ваттметров для измерения а1-.,ивной
мощности (см. § 12.3).
Для учета реактивной энергии нслопьзуется трехэлементный
счетчик типа СР4, предназначенный для учета реактивной энерг,ш
как в четырехпроводных, так и в -rрехпроводных трехфазных цепях.
Элементы этого счетчю<а включаю1ся в трехфазную трехпроводную
цепь точно так же, 1<ак и три обычнь•х ва-с1метра в случае приме­
нения И1' для измерения реактивной мощности (см. § 12.4).
Задание
1. Ознакомиться с приборами, предназначенными для выполне­
ния данной .1абораторной работы. Внести в протокол их паспорт­
ные данные.
2. Определить лостотшую Споы счетчика СА3 и лостояюrую
С�ом с<1етчика СР4 по формуле
С 110м = 3600• 1000/N0 •
лере
а
где Noд н:,чное число, }казаиное на щитке счетчика.
3. Собрать схему рис. 13.14, обратив особое внимание на nра­
вильиость включения геиераторных зажимов счетчиков.
РЕ(
СР4
Рис. 13.14 Схема включения
трехлроводную цепь.
сче1·чиков САЗ и СР4 в трехфазную
309
4. Подать напряжение на собранную схему п прогреть ее в те­
чение 15 мин. Записать показания амперметров и вольтметра.
5. Бык.;11очить напрнжение и зап11сать показаннн счетчиков l'J
(САЗ) и РК (СР4).
6. Вновь вклю•шть напряжение и производить учет активной и
реа1,тив1юй энергии в течение 30 мин (в течение этого времени не­
обходимо выполннть также п. 8 настоящего з:�даw,�я). Затем в:,111лючить иапряженне и записать nоказанпя счетчиков .
7. Используя данные n. 5 и 6, определить израсходованные аt<­
тивную и реактивную энергии за 30 мин работы лабораторного
стенда.
8. В период выполнения п. 6 подс•штать количество оборотов
д;ю,:ов счет•rю<а СА3 (Nсл'"") и счет,шка СР4 (Ncp4) за 1 мин. Вре­
мя необходимо определю ь по имеющемуся секундомеру. За дей­
ствительные Зi-iачения N САЗ и Nср4 взять средние зрифметические
значения, определенные из трех энспериментов.
9. Используя значения постояштых с•1етч11ков, определе!iиые при
выполнении п. 2, и результаты выполРения п. 8, рассчитэть аt<ТН!l­
ную и реа1сrив11ую энергию, расходуемую нагрузкоii за 30 мин
работы.
Wa = Свом NС.\3·30;
WР = С:,он Nср4·ЗО.
10. Сравнить результаты вьшолненин п. 9 с результата\1И вы­
полнения п. 7.
11. Рассчитать 1юэффициент мощности цеnн по фор�1уле
tgq, = Wp /Wa ,
используя значения 117а и !\;'р , полученные при выпэлаении п. 9.
12. Составить отчет по требуемой форме.
ГЛАВА ЧЕТЫРНАДЦАТАЯ
ИЗМЕРЕНИЕ ФАЗОВОГО СДВИГА И
ЧАСТОТЫ
14.1. ИЗМЕРЕНИЕ ФАЗОВОГО СДВИГА
Изr-;ерение фазовоrо сдвига между напряжением и то­
ком нагрузки на промышленной частоте, между двумя
гармоническими напряжениями (например, входным и
выходным напряжения.ми четырехполюсника, усилителя)
в зависимости от частоты, между двумя периодически.ми
напряжениями одинаковой частоты любой фор.мы - эти
задачи часто встречаются в исследовательс1юй и произ­
волственной практике. Методы из�-1:ерения и принципы
310
построения приборов зависят от диапазона частот сиг­
нала и его формы, мощности источников сигналов, тре­
буемой точности измерения.
Электромехан.u�tеские фаза.метры. Элеrпродииамичес­
иие и ферродинамические логометры могут быть исnо.чь­
зованы для построения фазометров (как показывающих,
так и самопишущих), предназначенных ДJШ измерения
U�r
и
12
1/1
lif
А
в
(р
с
Рис. 14.1. Электродинамический фазометр.
Рис. 14 2. Трехфазный
электроди11амичсск11й фа­
зометр.
фазового сдвига между напряжением и током в нагрузке
и 1юэффициента мощности.
Электричес}{ая схема электродинамичес1<0rо фазомет­
ра и соответствующая ей веI{торная диаграмма nредстав­
.rт�пы на рис. 14.1. Подвижная часть мexaiiIIЗмa, представ­
ляющая две жестI{о скрепленные между собой лод yrлo�I
60° ращш, крепится на осях и опорах. Механический
!rротнводействующий момент в механизме отсутствует.
Взаимодействие TOI{a / 1 (/1 =lнаг), протекающего по не­
подвижной I{атушке прибора 1, с током /2 , протекающим
no обмотке рамки 2, угол между плоскостью 1юторой и
плоскостью неподвижной катуш1ш равен 150° при а=О,
создает вращающий момент
((.4)
sin (150 ° - а).
М1 = cifif2 cos
Взаимодействие то1{а [1 с током Iз создает вращающий
момент М2, который действует навстречу моменту М1 :
М2 = c2l1/3 cos ((.)3 ) sin (150° - 60 ° - а).
Из векторной диаграммы следует, что cos
=COS q>.
,,,,,.......... =
(/1, /2)
311
Фазовый сдвиг между U (или /2 ) и то1юм /3 выполня­
ется равным 'lj)=60° за счет вю1ючения в цепь обмотки
рамки 3 катушки инду1<тивности L3 и резистора Rз. С!!е/..........__
довательно, cos (/1, /з) =cos (60 °-q>). В установившем­
t:51 режиме подвижная часть прибора займt>r по.rюжеш1е,
r1ри котором М 1 =М2, поэтому
c1 J 1/2 cos <pcos (60 ° - сх) = с211 13 cos (60 ° - <р) cosa.
Если выполняется условие с 1 12 =с2!3, то последнее ра­
венство будет вьшолнятьсн при а=(р. ТаI,ИМ образом,
угол повuрота подвижной части равен фазовому сдвигу
между нзпряжением и током в нагрузке. Прибор имеет
линеvну:ю шкалу. Его показанип практически не зависят
uт нестабильности напряження на нагрузке (в преде,1ах
10-20%). Недостатками таких фазо\fетров яв.rшются
сравните,1ыю большая потребляемая мощность от источ­
ника сигнала (5-10 В-А) и зависимость показаний vl'
частоты.
Шкала рассмотренного фазометра может быть про­
градуирована та1<Же в значениях коэффициента мощно­
сти, т. е. в значениях cos q>.
Приведенная погрешность лабораторных фазометров
не более +0,5%. Хара1перисппш, у1<азанные выше, име­
ет эле1<тродинамический фазометр типа Д578.
На основе эле1продинамичесю1х механизмов возмо:>1\­
но построение фазометров для измерения cos q> и в трех­
фазных цепях переменного тока. Схема включения фа­
зометра в этом случае приведена на рис. 14.2. По принци­
пу действия он подобен од1-юфазному фазометру, но
необходимые фазовые сдвиги между токами в обмотках
рамок подвижной части прибора можно подучить более
просто, используя 120-rрадусные сдвиги между напряже­
ш1ями и токами трехфазной цепи. Такой прибор дает
правиJiьные показания в трехфазной цепи с симмет­
ричными наnряженпями и токами. В случае несимметрич­
ной трехфазной цепи можно говорить лишь о разности
фаз между током и напряжением в каждой фазе. Приме­
ром подобного прибора яв.чяется фазометр тнпа ЭJ20,
ттриведенная погрешность которого не превышает 1,5%.
На основе ферродинамическоrо механизма выпуска­
ется также щитовой уз1юпрофильный фазометр типа
Д392, предназначенный для измерения cos q> в снммет­
ричной трехфазной цепи. Пределы измерения cos q> 0,5-1-0,5, �<ласе точности 2,5.
312
Электронный фазометр. Измер€ние фазевоrо сдвига
между двумя nериодичес1шми напряжениями (одной час•
тоты) в диапазоне частот до 1 МГц производится с помо,
щыо электронных фазометров. Структурная схема эле1<•
трапного фазометра приведена на рис. 14.3. Напряжения
U1 и tl2 (одно из них является опорным, например и 1) по•
'd01
ФУ1
ДЦ1
s т
'd02
,pyz
дцz
R
Рнс. 14.3. Электронный фазометр.
даются на два входа прибора (рис. 14.4, а и 6). В обоих
каналах напряжения усиливаются и, если их амплитул.ы
достаточно большие, ограничиваются ус1,тителнми-оrра­
ничите.11ями YOJ и УО2; затем с помощью формирующих
устройств ФУ 1 и ФУ2 эти напряжения преобразуются в
напряжения прямоугольной формы с крутыми фронтами
(рис. 14.4, в и г). Фазовый сдвиг напряжений на выходах
ФУJ и ФУ2 равен фазовому сдвигу входных напряжениii.
Дифференцирующими цепями ДЦJ и ДЦ2 формируются
Р11с. 14 5. Измеrенне фазы ме­
тодом J111ней1юit разоерткн.
+-
Рнс. 14.4. Временные диаrрам­
ыы сигналов в электронном
фазометре.
короткие импульсы, поступающие через диодные цепи
Дl и д2 на входы триггера Т, который имеет два устой­
чивых состояния (рис. 14.4, д и е). Выходное напряже­
ние триггера Т показано на рис. 14.4, ж. К выходу триr20-970
313
repa Т подключен магнитоэлектрический микроампер­
метр. Длительность импульса t,p на выходе триггера Т
связана с фазовым сдвигом следующим соотношением:
t ч, ={f)x/2nfc, где fc - частота сигналов. Тогда среднее
значение тока, протекающего через прибор, равно lcp=
=lmaxtq, /Tc , где lmax- амплитуда импульса тока; Те =
= l!fc - период входных напряжений. Нетрудно видеть,
ЧТО
fcp = fmnx (j)x/2n.
Таким образом, шкала прибора линейна и не зависит
от частоты. Э:rектронные фазометры работают в широком
диапазоне частот, имеют бо.1ьшое входное сопротивление
(малую потребляемую мощность от источников сигна­
.r�ов). Например, фазометр типа Ф2-13 имеет следующие
характеристшш: частотный диапазон 20 Гц-l МГц, из­
меряемый угол сдвига фаз + 180°, относительная погреш­
ность l,5-2%, входное сопротивление l МОм, диапазон
изменения входных сигналов 0,l-10 В.
Осциллографические методы uз,11ерения фазы. Среди
осци.r�лографическнх методов наибольшее распростране­
ние полу<rили методы динейной развертки и элю!пса.
Метод .•шнейной развертки предпо.r�агает применение
двухлучевого осци.r�лоrрафа или однолучевоrо осцилло­
графа с элеитронным коммутатором. В этом случае на эк­
ране осциллографа создается изображение двух напря­
женпй (рис. 14.5), фазовый сдвиг (J)x между 1юторыми не­
обходимо измерить. Если напряжения и 1 и щ на вход У
осциJ1.1ографа подаются через электронный коммутатор,
то изображения создаются штриховыми лшпщми (часто­
та коммутац11и значительно выше частоты напряжений
а 1 и и,2). По измеренным отрезкам а Ь и ас вы•шс.r�яется
q>x = аЬ•360 ° /ас.
Причиной погрешности измерения в данном случае
5ш,1яется прежде всего неточность измерения отрез1<0в
аЬ и ас.
Метод эллипса испоJ1ьзуется для измерения фазового
сдвига между синусоидадьиыми напряжениями. Напря­
)Кения и 1 и и2 подаются на входы каналов У и Х (ианал
Х работает в режиме усиления cнrнa.ria И 2). На экране
осцилдоrрафа получается изображение э.r�лнпса (рис.
14.6). Если ll 1 =ll y =U Ymax sin rot и U2 = Ux=ИxшaxsinX
(rot+(f)x), то в момент i=O пятно будет находиться в
�<
314
точке а или Ь, т. е. lаь=2Ихmах sin <р. Отрезок lcd, соот­
ветствующий максимальному отr<лонеиию луча по осн
Х, пропорционален 2Vxmax, т. е. lcd==2Иxmax- Следова­
тельно, sin <px = ab/cd и <px = arc sin (ab/cd). Метод эллип-_
са позволяет измерять (/)х в
пределах 0-90° без определе­
ния знака фазового угла. При­
чинами погрешности измере­
ния нвляются неточность изме­
рения отрезков и неодинако­
вый фазовый сдвиг в каналах
х и У.
Рис. 14.б. Из�1ерение фазы
методом эJIJHJЛca.
14.2. ИЗМЕРЕНИЕ ЧАСТОТЫ
Диапазон используемых частот в электроэнергетике,
электрофизике, техюше связи, радиоэлектронике очень
широ1< и простирается от долеil герца до десятков гига­
герц. Выбор метода и прибора для измерения частоты оп­
ределяется значением частоты, требуемой точностью из­
мерения, мощностью источника сигнала и другими фак­
торами.
Рассмотрим измерение частоты nоr<азывающими при­
борами.
Эле,�тромеханические цастото,неры. Эти приборы ис­
пользуются для измеренпя частот в диапазоне 202500 Гц в основном в энергетнчесrшх цепнх и въшо.гшяют­
ся на основе элеrпромагнитных и эле1<тродинамичесr<Их
(ферродинамичес1шх) механизмов.
Наиболее простым из электромеханическах частото­
меров является электромагнитный резонансный (вибра­
ционный) частотомер. Напряжение измеряемой частоты
подводится к обмотке эJ1е1промагнита. В поле электро­
магнита располагаются стальные пластинки, один конец
которых заl{реплен неподвижно. Свободный конец загнут
и окрашен яркой I<раской. Каждая пластина обладает
определенной частотой собственных колебаний. Под дей­
ствием электромагнитного поля и сил упругости п.пасти­
ны совершают 1юлебательные движения. С наибольшей
амплитудой колеблется пластинка, частота собств енных
колебанпй которой соответствует удвоенной частоте по­
данного напряжения. Вид шкалы вибрационного часто­
томера приведе н на рис. 14.7. Пределы измерения по
315
20"
частоте та�шх частотомеров небольшие, например 45-55
или 450-550 Гц. Относительная погрешность измерения
частоты 1,0-2,5 % .
Эле1{тричесная схема электродинамичесl{Ого частото­
мера на основе логометрического механизма и векторная
диаграмма токов приведены на рис. 14.8. Рамки подвиж-
ir,
и
1;
Rs
'2
r:�2
Рис. 14 7. Шкала вибрацнонщ:,­
го частотомера.
и
Ls
s
4---�12
Рис. 14.8. Э.JJектродинамнчес•
кий частотомер.
ной части частотомера Сl{реплены между собой под углом
90". Параметры l{онтура Lз, С3 и Rз подобраны таким
образом, что частота резонанса напряжений близка к
средней частоте диапазона измерения fер= (fн+f11 )/2, где
fн и fн - соответственно начальное и конечное значения
ш1н1;ш прибора.
Вращающие моменты, действующие на подвижную
часть, равны:
М1 =c1/1/2 sinф1 -a.)cos(90 ° ± <р) =
=c1/1/2 cos(45 ° -a)sin(+ q:,);
М2 = с2 If sin (�2 -а) cos 0 ° = с2 f�sin (45° - а),
°
где f\ 1 = 135°, f\2 =45 - соответственно углы между nлос1<остями первой и второй рамок и плоскостью неподвиж­
ной 1<атуш1<Н при а=О.
Момент М 1 зависит от угла поворота подвижной части
а и фазового сдвига между токами / 1 и /2 , 1юторый, в свою
очередь, зависит от измеряемой частоты fх. Момент М2
зависит только от угла а и не зависит от частоты fх. Мо­
менты М 1 и М2 действуют навстречу друг другу, и под­
вижная часть поворачивается до тех пор, по1<а не насту­
пает равенство М 1 =М2. Токи / 1 и / 2 с изменением изме­
ряемой частоты изменяются незначительно, и поэтому из
316
равенства моментов следует:
tg(45 ° -a) = csin(+ q>).
Так ка�< q>=Ч!(f,.), то a=F(fx ). Из последнего равен­
°
ст ва с ледует, что при fx = fcp {rp=O) а=45 . При fx = fн
стрелка займет крайнее левое положение, а при f x=fк­
крайнее правое.
На рис. 14.9, а показана конструкция электромагнит­
ного .11огометра, а на рис. 14.9, б - электрическая схема
l
и
а)
б)
fcp fк
ll}
Рис. 14.9. Эж:ктромаrннтный частотомер.
частотомера на его основе. Токи { 1 и /2 в цепях лоrомет­
ра распределяются обратно пропорциона.'lЬно полным со­
противлениям ветвей, 1юторые по-разному зависят от час­
тоты (рис. 14.9, в). Параметры цепей подобраны так, что
при средней частоте диапазона токи равны и указатель
занимает положение, соответствующее средней частоте.
Другим значениям fx соответствуют свои значения /1 и /2 ,
а следовательно, и углы от1{.1юнений подвижной части.
Эле1продинамические и электромашитные частото­
меры имеют узкие nреде.11ы измерения, равные +10%
средней частоты, приведенную погрешность 0,5-2,5%,
потребляемую мощность до 10 Вт, номинальное напряже­
ние 36-380 В. Та1шми характеристиками обладают эле1{­
лабораторные частотомеры типа
тродинамические
Д506М и щитовые уз1юпрофильные электромагнитны е
частотомеры типа Э393.
Электронные конденсаторные частотомеры. Они ис­
пользуются для измерения частоты nерио,1.ичес1шх напря­
жений: в диапазоне 20 Гц-500 кГц. Приведенная по­
грешuость таких приборов 0,5-2,5%.
зн
Принцип действия электронного ,rастотомера поясня­
ется схемой, приведенной на рис. 14.10, а, и временными
диаграммами на рис. 14.10, 6-д. Напряжение измерне­
мой частоты (рис. 14.10, 6) подается па вход усилителя­
формирователя УФ, усиливающего U вх и формирующего
из него прямоуго.11ьное напряжение (рис. 14.10, в). Этим
напряжением управляется электронный ключ ЭК. Допус­
тим, что при положительных полуволнах ключ ЭК замк­
нут, а при отрицательных nолуволнах разомкнут. При ра­
зомкнутом состоянии 1<люча в течение половины периода
1<0нденсатор С через резистор R заряжается до значения
Е (рис. 14.10,г). Ток заряда проте1<ает через диод VDJ
5) l<--+---J'---_,,,_____
0)
е)
t
i--.=,-i...--1._.,,,_,____,,__,__➔. t
д) .__....,__,,__,,__-1-"'-=-�
t
Рис. 14.10. Эле!{rропный частотомер.
и обмотку рамки магнитоэлектричес1<ого измерительного
мехапиз'1а (рис. 14.10, д). При замыкании ключа ЭК ,�он­
денсатор разрядится через него и через диод VD2. Таким
образом, за один период измеряемой частоты (Тх= 1/fx)
через измерительный механизм проходит заряд q=CE и
поэтому среднее значение тока в его цепи равно:
lcp = q!Tx = СЕ!Тх = CEfx,
Это уравнение справедливо при условии, что 1юнден­
сатор успевает полностью зарядиться до значения Е и
полностью разрядиться.
Электронные частотомеры имеют достаточно бо.1Jьшое
входное сопротивление, а следовательно, потребляют ма­
.пую мощность от источника сигнала.
Рассмотрим осuиллографичес1ше методы измерения
частоты.
Метод фигур Лиссажу. Этот метод используется для
измерения частоты синусоидальных напряжений. На один
из входов (например, на в ход канала У) подается напря318
жение с измеряемой частотой fx- На вход канала Х, рабо­
-rающего в режиме усиления (генератор развертки ГР
ОТI<лючен), подается напряжение с известной частотой
fo. Электронный луч nод действием двух взаимно перпен­
дикулярных и меняющихся по гармоническому закону
соответственно с частотами fx и fo напряжений вычерчн­
вает на экране некоторую сложную кривую. Если отноше­
ние частот выражается отношеннем целых чис ел, то ре­
зультирующая кривая (фигура Лиссажу) nредстав.Тiяется
Рис. 14.12. Измеренне часто1ы мето­
дом кpyroaor'I раз!!ертки.
+-
Рис. 14.11. Измерение частоты мето­
дом фигур J1нссажу.
в виде неподвижного изображения (пример такой фигурL1
приведен на рис. 14.11). Для определения отношения ча­
стот необходимо подсчитать наибо,1ьшее число точеi< пе­
ресечений вертика.1JЬной N у и горизонтальной Nх прямы­
ми наблюдаемой фигуры. Затем составляют отношенне
fvlfx = NxlNy,
где fy и fх - частоты напрнжений, подаваемые на входы
1tаналов У и Х осциллографа.
Для фигуры на рис. 14.11 N y =4, Nx =2, и поэтому
fv
Nx
1
Nx
= fхТ
= 2fх или fx = fo N
у
у
L
= 2 fo•
Погрешность измерения fx определяется погрешно­
стью известной частоты f0•
Метод круговой развертки. Этот метод также основан
на сравнении двух частот- неизвестv.ой и известной. Ec­
JIИ на входы обоих каналов осцнл.11ографа (генератор
развертки отключен) подать напряжения с одной (изве­
°
стной) частотой fo, но сдви нутые по фазе на 90 , то на
экране получим окружность. Время, за которое электрон­
ный луч описывает окружность, равно периоду наnряже319
ни я с частотой f0 • Подав напряжение с неизвестной часто­
той fx на сетку электро нно-лучевой трубки, при от­
ношении частот fx/fo =n(n= 1, 2, 3... ) получим ряд
неподвижных дуг (рис. 14.12). Число та1шх дуг равно п.
П огрешность измерения f" определяется погрешно­
стью известной частоты.
Осциллог рафические методы измерения частоты про­
сты, но требуют примененин генератора гармонических
к�.ТJебаний, частоту которого можно изменять, а ее зна­
чение до.11жно быть известно.
14 3 ЛАБОРАТОРНАЯ РАБОТА .№ 13.
ИЗМЕРЕНИЕ l(ОЭФФIЩИЕНТА МОЩНОСТИ
Задание
1. Ознако�1иться со схемой лабораторного стенда и записать
данные приборов.
2 Ознакомиться с �1етод11ческими указаниями 110 эксплуатацин
и приме1<ению приборов
3. Собрать схему, приведенную на rис. 14.13.
,v
�
1
1
наг,
1
,
}1
Вх.У �
t:J•
Х\ Вх.Х
1
1..; J
Рис. 14.13. Схема лабораторного стенда работы 1'.о 13.
<.J
с:,
�
4. Провести косвенное измерение коэффициента мощности
(cos <Р), используя прямые измереvrIЯ тока амперметром РА, 11а­
пряже1-1ия вольтметром Р V и мощности ваттметром Р \\7.
5. Провt>сти прямое измерение фазометром фазового сдвига
между напряжением II током в нагрузке qJ. По значению tp рассчи­
тать cos (р
6. Измерить (р методо'v! эл.JJюКа с помощью осциллографа. Вы­
<JНслить значение cos (!).
7 Объяснить поJiученные результаты.
8. Составить отчет по требуемой форме.
ГЛАВА ПЯТНАДЦАТАЯ
ИЗМЕРЕНИЕ МАГНИТНЫХ ВЕЛИЧИН
15.J. ОБЩИЕ СВЕДЕНИЯ
Электрические и магнитные измерения находятся в
тесной связи друг с другом. Эта связь - следствие едпн­
ства электрических и магнитных явлений.
Магнитные измерения дополняют электрические. По­
средством магнитных измерений решается ряд задач, I{
которым относятся исследование магнитных свойств ве­
ществ и материалов, исследование различного рода элек­
тромаrннтных механизмов, аппаратов и машин для выяв­
ления распределения магнитных потоков и МДС, кон­
троль качества магнитных материалов и изделий из них
в производственных условиях, испытание постоянных
магнитов и эJrе1промаrнитов и измерение по.rrей, созда­
ваемых ими, исследоваm1е маrнитного поля Земли, изу­
чение физпческих свойств материалов no их магнитным
характеристикам.
В большинстве случаев при определении хараl{терис­
тик магнитных полей и материалов магнитные величины
рассчитывают по полученным эксnериментаJ1ьно значе­
ниям электрических величин или электрических парамет­
ров.
Магнитные хара1{теристюш принято разделять на ста­
тические и динамнческпе.
Статические характериспши магнитных материалов
определяют в постоянных магнитных nо.11ях и используют
как для расчета устройств, где эти материалы работают
в таких же усJrовиях, так и для сравнения одних материа­
лов с другими.
Динамические характеристики магннтных материалов
измеряют в переменных магнитных полях. Последние за­
висят не только от свойств образца, но и от частоты маг­
нитного поля, формы кривой поля, формы и размеров об­
разца и лишь условно могут быть названы характеристи­
ками материала.
15.2. ИЗМЕРЕНИЕ МАГНИТНОГО ПОТОКА
В ПОСТОЯННОМ МАГНИТНОМ ПОЛЕ
Баллuстuцескuй гальван.ометр. Метод определения
магнитного потока с помощью баллистического гаJ1ьва­
нометра, основанный на измерении количества электри321
чества в пмпульсе тDка, наводимого в из11ерительной ка1ушке при измененюr потокосцеnления, относится к
индукционио-импульсному. Для измерения магнитного по•
гака катушка с известным числом витков wl( подключа ­
ется к баллистическому гальванометру через резистор
Rд (рис. 15.1) и зате:11 быстро удаляется из поля и.r..r
Рис. 15.1. Схс-,,а изr,1 ере11ия маr1штноrо потока инду1щиошю-им­
пульсным методом.
вноснтся в него. Изменение потока, сцепленного с катуш­
кой, вызывает в ней ЭДС
е = -щ,dФ/dt,
(15.1)
которая определяет ток
i = e,R = - (w1/R) (dФ/dt),
где R=Rг+Rк+R.(.
Изменение количества эле�,тричества dQ связано с из­
менением потока dФ, ка�< это следует из выражения д.'lя
тока i, следующим образом:
dQ = idt = -(w11/R) dФ.
Интегрируя послецнее уравнение в пределах от О до
t 1, получаем вы ражение для количеств:� эле,причества
n импульсе тока, определяемое путем изменения потока
от Ф до О (удаления катушки из поля):
0
t1
Q=Sidt= - wl{ sdФ=�Ф.
R
о
ф
R
(15.2)
Если измерительная катушка неподвижна, а измене­
ние потока от +Ф до -Ф вызывается изменением тока
от +I до -/, то количество электричества в импульсе то­
I<а, протекающего по цепи, равно:
Q=2
Ф.
(15.3)
R
При длите.n.ьности импу.1ьса тока, достаточно малой
по сравнени ю с периодом свободных �<олебаний гальва�
322
Wi;
иометра, можно считать, что первое наибольшее оп<ло­
нение его уназателя а.1т пропорционально 1юJ1ичеству
электричества в импульсе (см.§ 5.4.):
(15.4)
где CQ - цена деления {баллистическая постоянная)
гальванометра по количеству электричества.
Подставляя ([5.4) в (15.2), получаем:
R
Ф= --CФGzm,
w"
или
(15 5)
где СФ =CQ R- цена деления. (баллисти•1еская пос<rоян­
ная) гальванометра по магнитному потоку.
Таним образом, по от1,лонению уr{.азате.1я баллисти­
ческого гальванометра можно определять магнитный по­
ток
ПоскОJ1ьку С Ф зависит от активного сопротивJ1ения
цепи (от режима успокоения гальвано�1етра), ее необхо-
м
:� L---wz-c::::J----'
o----{:;ZJ--'
Rд
Рис. 15.2. Схема опредеJ1сиия цены деления ( баллистической посто­
янной) гальванометра.
димо определять экспериментально при включении ис­
пользуемой измерите.пьной 1,атушки и магазина сопротив­
ления Rд , пред назначенного для реrулировни чувстви­
тельности и обеспечения необходимого режима успоное­
ния гальванометра (рис. 15.2). Для этого пере1{J1ючатель
переводят из положения 1 в положение 2. В резу"1ьтате
ток изменится от +I до -/, что вызовет изменение по­
токосцепленпя вторичной обмотки катуш1<и взаимной ин­
дукrивности
(15.6)
323
Изменение потокосцепления приведет к появлению
импульса тока в цепи обмот,ш w2, и указатель гальвано­
метра отклонится на a 1m , при этом количество электри­
чества в имnу.��ьсе тока на основании (15.3), (15.4) и
( 15.6)
Q = 2Mf/R2 = CQ a1m ,
где R 2 - сопротивление цепи nторичпого контура.
С учетом последнего соотношения получаем:
СФ = CQ R2 = 2Mlfa1m •
(15.7)
баллистические
Выпускаемые промышленностью
гальванометры типов М197/1 и М197/2 имеют соответст­
венно цену деления 3,5• 10-5 и 0,35• 10-5 Вб/дел.
Веберметр. Веберметр предназначен ДJIЯ измерения
магнитного потока индукционно-импульсным методом.
Он представляет собой магнитоэлектрический гальвано­
метр без противодействующего момента. Ввиду этого
начальное положение стрелки веберметра а1 безразлич­
ное. Бескаркасная подвижная рамка 1 (рпс. 15.3), рас1
ф
Рис. 15 3. Схема измерения магнитного потока с помощью вебер­
метра.
положенная в воздушном зазоре между полюсными на­
конечниками постоянного магнита и сердечником, соеди­
нена с переключателем с помощью «безмоментных» то­
коподводов. Положение 1 переключателя соответствует
измерению. При удалении измерительной катушки из
магнитного поля ее потокосцепление уменьшается. За
счет возникшего импульса то1<а рамка 1 поворачивается
на такой. угол � (этому соответствует перемещение стрел­
ки веберметра из положения а, в положение а2 ), при ко­
тором происходит увеличение nотокосцепления рамки,
324
равное уменьшению nотокосцепления измерительной ка­
тушки. Поскольку магнитное ПОJ1е в рабочем зазоре ве­
берметра однородное и радиальное, изменение потоко­
сцепления рамки 1 будет пропорционально углу ее пово­
рота. Таким образом,
w11 Ф = wрФр = wpBsa,
откуда следует, что= -�- =
ф
wPBs
СФа Ла,
(15.8)
r�11
W11
где w r - число витков рамки; s - площадь рамки; В­
магнитная индукция в рабочем зазоре; С Ф -цена деле­
ния веберметра; Ла= 1 а1-а2IГрадуировка веберметра практически не зависит от
сопротивления внешней цепи, если оно не превышает
значения, указанного в паспортных данных прибора.
Для установки стрелI<и в начальное nоложеюrе ис­
пользуется вспомогательный магнитоэлектрический ме­
ханизм. Для коррекции положения стрелки переключа­
тель переводят в положение 2, при этом рамка 1 вебер­
метра подключается к рамке 2 вспомогательного меха­
низма. Рамка 2 вспомогательного механизма механически
связана с ручкой, выведенной на верхнюю панель прибо­
р3. Электродвижущая сила, возникающая при ее враще­
нии, создает в цепи, а следовательно, и в рамке 1 ток,
который, в свою очередь, приводит к появлению вращаю­
щего момента, поворачивающего рамку 1 на некоторый
угол.
Промышленностью изготовляются магнитоэJJектри­
ческие веберметры типов М199 и Ml 119 с ценой деJiения
5. 10- 6 и 10-4 В6/дел. соответственно. Основная погреш­
ность микровеберметра М199 не превышает + 1,5% при
сопротивлении внешней цепи не более 50 Ом. Для мил­
ливеберметра типа Ml 119 эта погрешность не превышает
+ 1 % при сопротивлении внешней цепи не более 10 Ом.
15.3. ИЗМЕРЕНИЕ МАГНИТНОЙ ИНДУКЦИИ
И НАПРЯЖЕННОСГИ МАГНИТНОГО ПОЛЯ
Индукционно-импульсный л�етод. Описанный в§ 15.2
метод измерения магнитного потока с применением бал­
листического гальванометра (или веберметра) 1 может
1 Пр11 исполъзовашш веберметра !1 приводимые в данном
параг­
рафе формулы следует подставлять значения Ла вместо a 1m,
325
быть испоJ1ьзован также для измерения магнитной ин­
,:�_укцшr п напряженности магнитного поля. Если поле од­
нородное и плоскость витков измеритеJ1ьной катушки пер­
пеидикуJ1ярна направлению вектора магнитной индукции,
1'0
B=Фr's,
Г.J.е s - пJющадь витка.
Учитывая (15.5), имеем:
сф- alm•
В=(15.9)
sw"
Для измерения магнитной индукции необходимо, как
и при измерении магнитного потока, изменив nотокосцеп­
ление нзмерите,1ыюй катушки, отсчитать первое наиболь­
шее отююнеаие уr{азате.1я баллистичесrшго гальвано,
метра и произвести расчет по ( 15.9).
Измерение напряженности индукционно-импульсным
методом аналогично измерению магнитной индукции.
Оно основывается на известной фун1щиональной зависИ•
мости между ними, т. е. д,1я вакуума и воздуха
В=µ0Н,
где µ0 - магнитная постоянная, равная в системе СИ
4:t· 10-7 Гн/м.
Из формулы, связывающей В и Н, находим:
Н = В!р0,
и.r.и, учитывая (15.9), получае:.1:
Н=
сф
f'oSWк
й1т
сф
=- alm•
k
(15.10)
где /г - постоянная измерптельной катушки.
Здесь, как и в c.rryчae измерения магнитной индукции,
предполагается, что поле однородно и направлено пер­
пендикулярно плоскости катушки.
Постоянная измерительной катушки k может быть най­
дена экспериментально. Для этого катушку помещают в
поле, напряже1-1ность которого Но известна. Для создания
образцового по.r1я применяют специальную катушку
(СК)., напряженность поля внутри которой можно рас­
считать. Постоянную катушки определяют по отклонению
указателя гальванометра при Вl{ЛЮчении или выключе­
нии тока катушки в соответствии с (15.1 О):
(15.11)
k = СФ a1mtH0 •
326
Часто при испытании магнитных материалов необхо­
димо знать напряженность магнитного поля внутри
образца. В ряде случаев напряженность определяют экс­
периментально, основываясь на том положении, 'lTO каса­
тельные составляющие вектора напряженности магнит­
ного поля на поверхности раздела двух однородных и
изотропных сред одинаковы, при этом достаточно опре­
делить напряженность магнитного по.1я на поверхности
образца. Для уменьшения погрешности в опреде.r�ении
напряженности магнитного поля измерительная катушка
должна быть шrоской и тонкой, чтобы витки находились
как можно ближе к поверхности образца. Кроме того,
она должна иметь четное число слоев, в противном слу­
чае ее концы, подключаемые к баллистичесному гальва­
нометру, образуют паразитный контур, а ЭДС, наводи­
мая в этом контуре при изменении потокосцепления,
вносит погрешность в результат измерении.
Измерение начинают с определения постоянной ка­
тушки, как это было описано выше. Затем катуш1<у на1<ладывают на поверхность образца так, чтобы ее ось сов­
падала с направлением поля, и присоединяют к балшrсти­
ческому гальванометру. Включая и.rJИ выключая тои,
создающий измеряемое поле, НJШ удаляя катушку из по­
ля, замечают отк"1онение указатеJiя rаJiьванометра и по
(15.10) рассчитывают напряженность подя в образце.
Измерение индукции и напряженности постоянного
JJtагнитного поля с использованием явления ядерного маг­
нитного резонанса. EcJiи на ядра какоI"о-:1ибо вещества
одновременно воздействовать постоянным и переменным
высо,шчастотным магнитными поJ1ями, то при опредеден­
ном соотношении между индукцией постоянного поля В
и частотой переменного поля u> наступает режим резо­
нансного поглощения энергии ядрами этого вещества.
Известно, что ядро атома может иметь определенное чис­
ло ориентаций во внешнем магнитном поле; ДJIЯ ядра
атома водорода - протона таких возможных ориентаций
две: по ПOJIIO и против поля. Этим двум состояниям соот­
ветствует определенная разность энергий, которая равна
2 µ,рВ, где �tp -- магнитный момент протона. Кроме того,
для переориентации протона из паправJiения по полю в
противоположное необходим кв_ант энергии hf, где h­
универсальная постоянная Планка; f - частота.
Из изложенного следует, что
2µр В = hf
327
4n
со = 2nf = - µ р В = i'р В '
/1
где i' P - гиромагнитное отношение протона, т. е. отно­
шение его магнитного момента к механическому, извест­
ное в настоящее время с высокой точностью [i'P =
=2,67512-106 1/ (Тл•с)].
Из последнего выражения видно, что
( 15.12)
В = 2nflvp
Структурная схема устанОВl(И для определения индук­
ции постоянного магнитного поля приведена на рис. 15.4.
В измеряемое магнитное поле помещается катушка
колебателы101·0 контура геt1ератора, внутри которой на­
ходится стею1ян11ая ампула с рабочим веществом, содер­
жащим я,1ра водорода (протоны) или ядра других эле­
ментов, например лития и дейтер1'1Я, имеющие значения
в
Рис 15 4 Струr<турная схема уста­
нов1<и для измерения индукции ло­
стшшного ма!'НИТНО"О поля с ис­
ЛОJIЬЗОВанием ЯВJiения ядерного
магнитного резонанса
Рис 15 5 Измерение маг­
нитной ИНДУКЦИИ С ЛО'\IОЩЬЮ
преобразователя Холла
rиромаг.1штных отношений ядер, 01личные от гиромаг­
нитного отношенпя протона. Это позво11яет расширить ди­
апазон измеренпй. В качестве рабочих веществ часто
применяют обычную воду, водный раствор хлорпстого
лития, а также тяжелую вод:'.
Для определения момента резонанса изменяют часто
ту колебаний генератора и ведут поиск резонансного сиг­
нала с помощью эJ1ектронно-J1учевоrо осциллографа.
УсиJiитель предназначен для ус1,IJ1ения сигнала, поскоJiь­
J<у последний мал. Резонансная частота определяется
частотомером.
328
Метод применим для измерения индукции и наnря­
жею-юсти однородных магнитных полей с погрешностью,
не превышающей 0,0 l % .
Промышленностью выпущен ряд измерительных при­
боров, действие которых основано на явлении ядерного
магнитного резонанса: это тесламетры типов Шl-1, Шl-2
и измеритель напряженности магнитного поля типа
Е11-2.
Определение магнитной индукции с использованием
аффекта Холла. Эффе,п XoлJia состоит в появлении ЭДС
Ех между противоположными сторонами пластинки из
металла или полупроводншювого материала, если через
пластинку nропустить ток и поместить ее при этом в маг­
нитное поле (рис. 15.5). Направ,1ения тока, вектора маг­
нитной и ндукции II ЭДС Холла взапмно перпендикуляр­
ны. Для изготовления преобразователей Холла в настоя­
щее время применяют полупроводники
(германий,
сурьмянистый индий, МЫШЬЯ!<ОВИСТЫЙ индий И др.), та!(
ка1( они дают значительно большую ЭДС Холла, чем ме­
таллы.
Магнитная индукция, то1< и ЭДС Холла связаны меж­
ду собой следующпм образом:
Ех = R x IB!d,
ОТI<уда магнитная индукция
(15.13)
В= Exd!Rxl,
где R x - постоянная Хо,1ла; а - толщина пластинки.
Основными достоинствами преобразователей Холла
являются пропорциональность ЭДС Холла индукции, ма­
лые размеры и масса, возможность их исnоJ1ьзованпя для
измерения как постоянных, так и переменных поJ1ей до
частот 1012 Гц. С помощью преобразователей XoJrлa мож­
но измерять магнитную индукцию в диапазоне от 0,001
до 1-2 Тл. Главный недостаток - зависимость постояп­
ной Холла от температуры.
Тесла.метр с преобразователем Холла. На рис. 15.6
nоказана упрощенная принципиальная схема тесламет­
ра. ПреобразоватеJ1ь Холла питается переменным током
частотой 1000 Гц от генератора через трансформатор.
Измерение ЭДС Холла осуществляется ко�пенсацион­
ным методом. Компенсирующее нап р яженне U11 , снимае­
мое с резистора R 1 , и ЭДС Холла Ех подаются в проти­
вофазе через резисторы R2 и Rз на сравнивающее уст21-970
329
ройстnо СУ, состоящее из усилителя, фазочувствитеJТьно­
rо выпрямителя и микроамперметра. ПоскоJТьку компен­
сационная цепь и преобразователь Холла питаются от
одного и того же генератора, ис1<лючается погрешность
от нестабильности частоты и выходного напряжения ге­
нератора. В приборе предусмотрена 1<оррекция поrрешноR�
r
R
Рис. 15.6. Упрощенная принципиальная схема тесламетра.
стей из-за нелинейной зависимости ЭДС Холла от инду1<­
ции.
По оnисанноtr схеме выполнен выпускаемый промыш­
ленностью тесламетр типа Ш1-8, который предназначен
для измерения индукции постоянных магнитных ПОJ1ей в
диапазоне от 0,01 до 1,6 Тл. Основная погрешность при­
бора не пр евышает +2%.
15.4. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
МАГНИТНЫХ МАТЕРИАЛОВ
Наибольшее распространение на nраhтю,е, а также в научных
исследованиях получили ферромагнитные и фЕ>рримаrнитные матер11а­
:1ы (ферриты), отличающиеся от др) rих материалов сильно выражен­
ными магнитными свойствами Все магнитные материалы принято под­
разделять на м1н·нитомяrк11е и маrнитотвердые. Маrнитомяг1ше ма·
териалы J1егко нама1·1-шчиваются II леr1ю размагничиваются, а м1:1г­
т11 о rВ<'р.1.ь,е - наоборот.
Д.,q сравнения свойств разJIИч.ных магнитных материаJIОВ, а так­
же дJIЯ рас•,ета �строuств, содержащих магнитные цепи, необходимо
э11ать магнитные характеристики этих материалов.
Стап1•tес1ше sарактеристикu. Важнейшими статичес�-ими xapai(•
теристиками явJ1яются основная кривая намагничивания II симмет­
ричная предеJ1ьная (наибольшая) петля rистерезис1:1.
Основная кривая намагничивания представляет собой зависи­
мость магнитной и11ду1щии от напряженности магнитного поля
B=f (H), полученную на предварите.�1ыю р1:1змапшчепном образце
(р ис. 15.7).
По основной кривой намагничивания можно опреде.�шть магнит•
ные проницаемости µ=В/µоН для различных зна•1ений Н. Нача:1ыrыii
участо 1< кривой соответствует области начальной магнинюй прони330
цаемости
1111
= Н-+О
lim (В/11о Н),
к оторая rрафичесю1 определяется как tg а... Аналогичн о
быть найдена максимальная магнитная проницаемость
может
µтех = tg атах·
Зависимость µ=f(lf) показана на рис. 15.8.
JI,
flma,x
н
о
Рис. 15.8. Зависимость µ=f(H).
Рис. 15.7. Основная кривая на­
маrничия аи 11я.
На пра1<т111<е пользуются основной I<рнвой намагничивания, ко•
торая является геомстричес1<нм местом вершин семеi1ства симметрич·
ных петель гистерезиса (рис. 15.9). По преде.льной петле гистерези­
са можно найти ма1<симальные значения инду1<ции Вт"х и напряжен•
::�'ТИ Нта,х, а таюке r::т:;:-rо-1ную
в
11нду1<ц11ю В, и коэрцитивную сНJ1у
Нс, т. е. напряженность поля, при
которой В=О.
По виду оснопноr, 1<рнпой на­
магничивания и петди гистерезиса,
а та!{Же по зн ачениям В,пах, H,nax,
В, И Нс МОЖНО СУДИТЬ О СВОЙСТ·
вах данного ма1·нитного материа- -..:Н.�m:щtt=1t�'.:!,f+-,f..l,i'?\c?'�H+--:-,.1-,llma,;;H
дa и области его пра�<ти чес1< ого
I
примеиен11н.
1
.МатериаJJы с уз1<ой пет.лей rи1
....
Рис. 15.9. Основная кривая намаг­
ничивания 1<а1< геометричес1<ое
место вершнн симметричных пе­
тель r11стерезиса.
1
J
1
о
----- -Вта:с
стерезпса п больш11м з11а•1е1111ем В,, яIJJiяющиеся маrннто�1яrкими,
це,qесообразно прнменять, например, ДJ!Я нзготовлеиня магнитопрово­
дов измерительных механизмов, у которых рабочее магнитное поле
создается измеряемым -rо1<ом. Это уменьшит погрешности из-за rн•
стерезиса и нелннеiiности 1<рнвой наыапшчива1шя.
21"
331
Материалы с широкой петлей гпстерезиса н большой магнитной
энергией (В//- /2)maoc относятся к магнитотвердым и используются
для 11зrотовлен11я постоянных магнитов, область применеп11я 1<ото•
рых очень широка.
Разновндностыо магнитных материалов являются материалы
с прямоугольной nет.�ей rистерезнса. Для них введена специальная
характерпспша -коэффициент прямоугольностн kп =B,/Brnax• Об­
ласrь 11х пр1"1еиения - запомннающне устройства в nычислителыюй
технике, преобразователи в измерительной тех.пике и др.
При определении статических хара1перистш< магнитных мате­
риалов надо пметь в виду, что хара1перист111ш образца II матер11а­
ла могут нс совпадать. Если образец имеет воздушный зазор, то Jазор
оказывает раз"1аrни1швающее деikтвие, вследствие этоrо напряжен­
ность в образце будет меньше той напряженности, которая опреде­
ляется МДС. Поэтому при определеини магнитных характер11ст11к
матернала же.�ательно применят�, замкнутые образцы, а в случае
необходпмостп испытания стержневых образцов следует пользо­
ваться пермеаметр ами. Пермеа\.!етр - устройство, предназначенное
для исnыта1шя стержневых образцов и исключающее возможность
замыhания мзrиитноrо потока по воздуху.
Дин.амиlf.ескuе характеристики. При перемаrнич11вании матерна­
лов переменны�� периодически меняющимся магнитным полем
вс,эникают внхревые токи и связзнныii с Нf1 111и поверхностныi1 эф­
фе1<т. Это приводит к неравномерности распределения магнитного
поля по сечею•ю образца. Кроме того, значение внхревых токов за­
В1•с11т от чзс готы, а следовательно, и намагничивание образца nрн
разных чзстотах будет раз.;1ичиьш. Такпм образом, nрн измерении
маrнитноii индукции п наnрнженности маrннтноrо по.-�я можно I о­
ворить лшш, об пх усредненных значениях, которые 1,: тому же яв­
ляются фунl(цией частоты.
•
Закон изменения напряженности магнитного поля и маrнитиои
инду1щии во времени в общем случзе не является синусоидальным
вследствие нелинейности I<ривой намагничивания н гистерезиса.
Определив ряд амплитудных значенпй Вт при разШ!'!НЫХ амп,tи­
тудных значениях Нт , можно построить зависимость B.,,= f (Нт ),
называемую динамической кривой иамагнич11ван11я. Знание В т 11
H,n дает возможность рас считзть амплитудную магнитную прони­
цаемость µ т =В,п/�Н т.
Измер,,в мrнсвеиные значения B t и Н,, можно также построить
зависнмость B1=f(Ht). Эта зависимость есть не что 11ное, как ди­
намичес1,ая петJIЯ гистерезиса_
Д11намичес1ше харш<Теристики зависят от целого ряда факто­
ров и лишь условно MOl')'T быть названы хзрактернстикамн материа­
ла. При их использовании надо точно знать условия, в l(оторых они
определялись, а таюке материал, форму и размеры образца.
15.5. ОПРЕДЕЛЕНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК
Наибо.r�ьшее распространение д.r�я снятия основиой
кривой намагничивания и петли гистерезиса получил
нндукционно-импульсный метод. Экспериментальное оп­
ределение этих хара"теристиl{ производится на 1ю,11ьце­
вых или стержневых образцах.
332
На кольцевые образцы поверх изоляции наматывают
равномерно по периметру сначала измерительную об­
мотку w2, а затем намагничивающую w 1• Чтобы умень­
шить погрешность в расчете напряженности намагничи­
вающего поля, отношение внешнего диаметра кольца к
внутреннему dвш/dвт должно быть не более 1,3. У1<азан­
ная погрешность связана с различием числа вит1<0в на
единицу длины по внутреннему и наружному перимет­
рам кольца.
Из-за сложности изготовления r<ольцевых образцов и
ваматьшания обмоток w 1 и w2 приходится пользоваться
стержневыми образцами. Концы стержневого образна
необходи�ю замьl!{ать магпитопровадом с магнитным со­
противлением, во много раз
меньшим сопротивления об­
разца. Для этой цепи ис­
пермеаметры.
пользуются
Одна из констру1щи й пер- 1
-+
Рис. 15.10. Устройство пермеамст•
. ра.
меаметра показана на рис. 15.10. Он представляет собой
магнитопровод 1 с размещенными внутри намагничива­
ющей W i и измерительной w2 обмотками. Магнитопровод
выполнен из магнитомягкого материала с боJiьшой маг­
нитной проницаемостью. Площадь его поперечного сече­
ния во много раз больше площадп поперечного сечения
образца 2. Это обеспечивает малость магнитного сопро­
тивления пермеаметра по сравнению с магнитным сопро­
тивлением образца.
Образец вставляется в боковые прорези пермеамет­
ра и закрепляется. Возникающий воздушный зазор ме­
жду обра.щом и торцами магнитопровода увеличивает
магнитное сопротивление цепи и вызывает погрешность.
Для уменьшения этой погрешности вводят попрашш.
Перед измерениями образец размагничивают. Раз­
магничивание проводят или в переменном магнитном
поле путем плавного уменьшения его от максимального
значения до нуля, или в постоянном поле путем изме­
нения направления :намагничивающего тока с одновре­
менным уменьшением его до нуля. Максимальная напря•
женность поля при размагничивании должна быть, по
333
J<райней мере, в 10 раз больше коэрцитивной сиJ1ы.
Схема баллистической установки изображена на рис.
15.11.
Для размаrничиваю1я образца 1<люч SA4 размыкают,
а ключ SA/ замьшают; переюно•1атель SA3 ставят в по­
ложение 2; переключатель SA2 может находиться в про­
извольно:\-1 положении (1 или 2). С помощью реостата
Обдазец
Рве 15 11. Схе\1а бал.ппстическоii установк11.
R 1 устанавливают намагничивающий ток, соответствую­
щий макси:'v!альной напряженности. Переhлючателем
SA2 изменяют 8-]О раз направление тока. После этого
ток немного уменьшают и снова ,юммутируют его нап­
равление. Процесс размагничивания продолжают до тех
пор, по1<а ток не будет уменьшен до ну.11я.
При определении цены л.еления гальванометра ключи
SAJ, SA4 должны быть зам,шуты, а пере1<.11ючатель SАЗ
переведен в положение 1. Пос.11е корректировка ну-1ево­
го положения указателя гальванометра по методике, из­
ложенной в § ]5.2, определяют цену деления гальвано­
метра по магнитному потоку.
Снятие основ,юii кривой намагничивания. Для на­
хоЖдения основной кривой намагничивания, которая яв­
.11яется геометрическим местом вершин семейства сим­
метри•шых петель гистерезиса, предварительно задаются
наnряженностями поля (рис. 15.12) и рассчитывают по
ним необходимые значения то,юв:
(15.14)
где 1- длина образца по осевой линии.
При определении основной 1<ривой намагничивания
переключатеJ1ь SA3 до.11жен находиться в положении 2,
331
I<шоч SA 1 замI<Нут. В исходном состоянии переJ<люча­
тель SA2 может быть в любом положении; ключ SA4
должен быть разоJ1шнут.
Для получения точI<и А 1 , соответствующей вершине
первой петли, с помо щью реостата R 1 и ампермет ра РА/
устанавливают расчетное значение намагничивающего
тока. Сделав 8- IO переJ<люченю"r этого тоI<а, оставляют
переключатель SA2 в каком-либо положении (1 или 2).
в
в�• --�1 д
1
'
1
�Нта:,
Рнс 15 12 К определению ос­
новной кривой намагиичпваиия.
Рис. 15 13. К оnредслешно пет­
ли r11стерсз11са.
J\'1ноrоI<ратная коммутация намагничивающего т01-а нуж­
на для установления магнитного режима образца. Эта
операция называется подготовкой образца.
После подготовки образца замыкают ключ SA4 и при
необходи::\Iости корректируют нулевое положение указа­
теля га.'lьванометра, затем перебрасывают переключа­
тель SA2 в nротивопо.rюжное положение и замечают от­
клонение указателя гальванометра а 1щ.
При перекточении тока / 1 напряженность поля из­
меняется от +Н 1 до -Н 1 , а магнитная индую1.rш - от
+В1 до -В 1 , т. е. на 28 1 .
Зная а1щ по (15.9), находю1:
сф
а
В 1 =-2sw2 1т ,
где s - площадь поперечного сечения образца.
Для определения других точек кривой поступают точ­
но так же: устанавливают вычисленный намаrничиваю335
щий ток, nроnодят магнитную nодготовI<у образца, за­
мыкают ключ SA4 и переводят переключатель SA2 в
противоположное положение. По полученному отI<лоне­
нию указателя рассчитывают магнитную индукцию.
Снятие петли гис'герезиса. Как и при определении
точек основной кривой намагничивания, сначала зада­
ются значениями напряженности, при которых будет из­
меряться магнитная инду,щия, и рассчитывают соответ­
ствующие им токи.
Полу•1ение точе1< А и С ( рис. 15. I 3) ничем не отлича­
ется от получения точек основной кривой намагничива­
ния. Нахождение других точен петли на ее нисходящей
ветви в первом квадранте производится с.r�едующим об­
разом. Переключате.1ь SАЗ должен находиться в поло­
жении 2. В исходном состоянии пере1<.r�ючатель SA2
должен быть в положении 2, а 1<.r�юч SA4 разоюшут.
Разомкнув нлюч SA 1, с помощью реостата R2 и ам­
перметра РА2 устанавливают тон, соответствующий на­
пряженности Н 1 , nри этом не трогают реостата R 1 ,
1<оторым ранее был установлен тот,, соответствующий на­
пряженности Нта:,,. Снова замыкают ключ SAJ и прово­
дят магнитную подготов1<у образuа. Переключатель SA2
после подготовки оставляют в положении 2.
Замыкают ключ SA4 и производят при необходимо­
сти коррекцию нулевого положения у1<азате.rJя rаJJьвано­
метра, затем размыкают 1<люч SAJ и замечают откло­
нение а 1т . Мзгнитная индукция при размыкании т<люча
SAJ изменится от В тах до В 1, та1< т<а!{ при этом напря­
женность no.riя изменится от Нтах до Н 1•
По от1<лонению указателя а1т находят разность
сф
лв = втах• - В1 = -alm•
SW
2
откуда
(15.15)
Таким же образом определяют точку А 2 и другие
точки, расположенные в первом квадранте на нисходя­
щей ветви петли гистерезиса.
Порндоr, нахождения точки А 3 следующий: после
магнитной подготовки образца за:-,1ыI<ают ,,люч SA4 и
размы1<шот цепь намагничивающего тока, переводя ne336
реключатель SA2 в нейтральное положение. По полу1.Jенному отклонению у1<азателя га.r�ьванометра а1т опре­
деляют остаточную инд укцию
сф
(15.16)
Br = Втах --- а1 т .
SW2
Для нахождения точек петли гистерезиса во втором
и третьем квадрантах отклонение у,<азателя гальвано­
метра определяют, переключая направJ1ение намагничи­
вающего TOl{a с одновременным изменением его значения
С этой целью при разом,шутом ю1юче SAJ и пере1<лючателе SA2, находящемся в положении 2, устанав­
ливают реостатом R2 намагничивающий ТО!{, соответству­
ющий отриuательному значению напряженности поля,
например -Н4. Затем замыкают 1<люч SAJ и проводят
магнитную подготовн:у, после которо й переключатель
SA2 оставляют в положении 1. Снова размыкают ключ
SAJ и замыкают ключ SA4. Переводя nере1<лючатель
SA2 из положения 1 в положение 2, замечают от1<ло1-1е­
ния указателя гальванометра.
При определении точI<и А 4 намагничивающий ток из­
менится от Imax до -1 4, что будет соответствовать из­
мененюо напряженности от Нтах до -Н4 и изменению
ИI-1,ЦУIЩИН ОТ Bma:� ДО 8 4.
Индукция В 4 может быть рассчитана по ( 15. 15):
сф
В4 = втах - -- al m •
ьw2
Таким же способом находят и другие точки этой ча­
сти петли во втором и третьем ,шадрантах.
Вторая по.rювина петли гистерезиса может быть по­
строена по первой, та" ка" петля симметрична.
15.6. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ ХАРЛ((ТЕРИСТИ((
Феррометр. Для магнитных измерений в переменных
магнитных полях часто применяют феррометры. С ПО·
мощью феррометра можно получить основную кривую
намагничивания, петлю гистерезиса, найти зависимость
магнитной проницаемости от напряженности, а таI<же
определить магнитные потери на переменном токе.
Принцип действия феррометра основан на нахождении
магнитных величин путем измерения напряжений, свя­
занных с этими величинами известной зависимостью.
337
Феррометр состоит из магнитоэJ1ектрнческоrо вольт­
метра, механического управляемого вылрямителя, ка­
тушки взаимной индуктивности М, фазореrулятора, пе­
реключателя SA и регу.Гiятора напряжения Т (рис.
15.14). Механический управляемый выпрям итель пред•
е,
.Jy
Uy
R
м
f i
-�
:,. Si
'----C:J-r'...,._ - - i
2
V
Риес J·5.14. При1щилиа.1ы�.ая схема феррометра.
Рис. 15 15. Диаrра\!МЫ
токов, маrнипюrо пото­
ка н ЭДС nрн опреде.�е­
вии магнитных характе­
ристик феррометром.
ставляет собой эле1про:-.1агнит с обмот1юй возбуждения
w, управляющий состоянием 1юнтаюа S. В течение од1-юго полупериода тока iy контакт замыкает цепь вольт­
метра, в течение второго - размыкает (рис. 15.15, а).
338
Фаза напряжения Иу и, следовательно, тока .i/ может
изменяться в результате поворота ротора фазорегуJiя­
тора, при этом будет изменяться момент времени, кото­
рый соответствует началу замы1,ания контакта (рис.
15.15, 6). На рис. 15. 15, а-в заштрихованные части диа­
граммы обозначают замкнутое состояние измерительной
цепи.
Показания магнитоэле1,трического вольтметра про­
порциональны среднему за период значению напряжения
U=iRv:
Иср = fcvRv,
где Rv - входное сопротивление вольтметра.
Nlаксимальным показание будет при -ф=О и равны'vl
HyJJIO лрн ф=90°.
ВоJiьтметр градуируется в действующих значениях
переменного синусоидального напряжения. По1,азания
ВО.ТJЬТМетра:
(15.17)
Uv = 2kФ U cv ,
где kф = 1,1 I -1юэффициент формы переменного синусо­
идального напряжения; И ср -среднее за период значе­
ние измеряемого напряжения.
Коэффициентом 2 в ( 15._17) учитывается при градуи­
ров1,е то обстояте.ТJьство, что ток в измеритедьиой цепи
протекает толыю в течение одного полупериода.
Чаще намагничивающий переменный то1, i 1, а также
напряженность магнитного поля и лоток в образце не­
синусоидальны. В этом с.ТJучае несинусоидальны ЭДС
е 1 и е2, от которых зависит среднее значение напряже­
ния, при.ТJоженного к вольтметру.
На рис. 15.15, в по1,азаны диаграммы nериодичес1ш
изменяющегося во времени несинусоидального магнит­
ного потока и связанной с ним ЭДС е2:
е3 = - w2dФ/dt.
Входное сопротивление во.ТJьтметра во много раз
больше солротив.11ения обмот1,и w2• Поэтому падением.
напряжения на ней пренебрегают и считают, что напря­
жение, приложенное к вольтметру, равно ЭДС, т. е.
U2 =e2.
Если кривая пото1,а симметрична относительно оси
времени, то симметрична относительно оси времени и
1 Здесь и ниже с1штается что напряжение иу и TOI( iy совпада•
1
ют по фазе.
339
ЭДС е2. Это обычно выполняется. Тогда среднее за пе­
риод Т значение напряжения u2 (рис. 15.5, в)
U2ср = Е2ср
t
= + \ e2dt = -
=-
.
1,
W2
т
7
1
dФ =
Фt
,
(Фt 2 - ф 1 I) •
Так как Ф12 =-Ф,, и T=l/f, где f-частота , то полу­
чаем:
(15.18)
И2ср = 2fw2Ф1,Выражая И 2ср в (15.18) через (15.17) для прои.:Jволь­
ного мо:мента времени t 1 =i, имеем:
U2v = 4,44fw2 Ф t,
откуда мгновенное значение потока
(15.19)
Фt = И 2v /4,44fw2•
Отсчет показаний вольтметра U2v производЯ1, ког­
да переключатель SA находится в положении J.
В частном случае максимальному показанию вольт­
метра, I<оторое может быть получено реrулиров,юй фа­
зы тоJ<а iy , будет соответствовать амплитудное значение
измеряемого потока
(15.20)
Фт = U,vmaxf4,44fw2•
Фор:1iу.ilами (15.19) и (15.20) можно также воспол�­
зоваться для определения магнитной индукции. Разде­
лив их левые и правые части на s (площадь поперечн()­
го сечения образца), получим соответственно:
(15.21)
Bt = U2vl4,44fw2s;
= U2V
(15.22)
,
s.
44f
l4
w
2
max
т
в
Напряженность магнитного поля измеряют анало­
гичны111 образом. Известно, что
е1 = -М diifdt.
Учитывая это, находим среднее за пер1юд значение
напряжения U1:
340
или
V1cp = 2 fMiн,.
На основании (15.14) выразим ток в полученной
формуле через напряженность магнитного поля
V1cp = 2fMlH1Jw 1 •
Затем, представив среднее значение напряжения
U1cp в виде показания водьтметра И 1 v , поду,шм дJIЯ про­
изво.rн"ноrо момента времени t 1 =t
U1v = 4,44f MlHtfw1,
откуда
(15.23)
Показание вольтметра определяют, когда перекщоча­
теJ1ь SA находится в положении 2.
В частном случае амплитудное значение напряжен­
ности подя можно найтн по ма1(симальному показа1-шю
вольтметра, воспользовавшись формулой
Нт =Иiv max wif4,44fMl.
(15.24)
Изменяя намагничивающий ток и проводя при 1<аждом
его значении измерение амплитудных значений магнит­
ной индукции и напряженности поля, можно определить
основную динамическую кривую намагничнвания Вт =
=f(Hm ).
По полученным значениям Вт и Нт можно также
рассчитать амплитудную магнитную проницаt":v�ость
µт =Вт/µоНт и построить зависимость µ,,,,.=f<Hm ).
Снятие динамической петли гистерезиса проводится
при заданной напряженности поJiя Н,,,_. Для этого уста­
навливают какое-либо значение напряженности, соответ­
ствующее среднему учасп(У осноnной кривой намагни­
чивания, и добиваются поворотом ротора фазорегулято­
ра максимального показания вольтметра, при этом
переключатель SA должен находиться в положении 2.
Затем, не изменяя фазы намагничивающего тока, доби­
ваются регулирощюй тока заданной напряженности. Зна­
чение напряженности определяют расчетным путем по
показаниям воJ1ьтметра. После установления заданного
магнитного режима получают точки петли гистерезиса
Н1 и В1 • Для этого, оставив перекдючатель SA в поло­
жении 2, добиваются нулевого показания вольтметра.
Это положение ротора фазорегулятора принимают за
311
нулевое (-ф=О). Перебросив пере1<люча1ель SA в поло­
жение /, по показанию вольтметра находят мгновенное
значение инду1щии В 1 • Так получ ают 1<оор динаты пер ­
вой точки А1 петли Н1=0; В1 =В1, (рис. 15.16,а).
В дальнейшем, поворачивая ротор фазореrулятора
J<аждый раз на выбранный угол, например на 30°, по
поr(азаниям волгтметра находят координаты других то­
че1< динамической петли гистерез иса: А 2-А 6 , при этом
последнюю точку А 6 оп­
ределяют, 1югда ротор
фазореrулятора будет rю­
вернут на 180 ° относи-
.....
Рис 15 16 1( определению 11:1на'llической петли гистерезиса.
а - петля гистерезиса,
H(f) 11 В\1).
6-кривые
тельно исходного (нулевого) положения.
Одна из координат искомой точки А,,. задана (l/111 ).
Вторую (Вт ) измеряют способом, который описан вы­
ше и применяется ДJIЯ определения точек основной кри­
вой намагничивания. Так получают одну половину пет­
ли. Вторую достраивают из соображений симметрии.
При необходимости визуальной оценки несинусои­
да.11ыюсти кривых B t 11 Ht полученные при опреде.1ении
петли гистерезиса резуJ1ьтаты представляют в виде гра­
фиков (рис. 15.16, 6).
Удельную мощность потерь на гистерезис и вихре­
вые токи можно рассчитать по формуле
1
Рго = (V2'1 COS(p) Wi --,
(12.25)
Wz
G
где U2 - действующее значение напряжения на выво­
дах обмотки w2; 1 1 cos ({) - активная состав.1яющая на­
магничивающего тока; w 1 и w2 - чнсла витков об�1отоh;
G - масса образца.
Погрешность при определении удельной мощности
потерь феррометром будет тем меньше, чем ближе фор­
ма кривых i 1 и е2 к синусоидальной. Это связано с тем,
что вольтметр феррометра дает показания в дейстnую­
щих значениях только при синусоадалыюй форме изме­
ряемых напряжений.
Для измерения U2 поворотом ротора фазорегулятора
добиваются наибольшего показания вольтметра. Это бу312
дет означать, что токи i и iy совпадают по фазе. Затем
производят отсчет И2vmax=V2. Пере1<лючатель SA
должен при этом находиться в по.ттожении 1.
Для тuro чтобы найти активную составляющую на­
магничивающего тО1{а f1a =1 1 cos QJ, не изменяя положе­
ния переключателя SA, вращают ротор фазореrулятора
до получения нулевого показания вольтметра. Это бу­
дет свидетельствовать о том, что токи i и iy сдвинуты
по фазе на 90° .
Затем переключатель SA переводят в положение 2
и производят отсчет показаний И1v - Искомый ток рас­
считывают по форму.!Iе
(15.26)
11 cos QJ = V 1v !2nfМ.
Подставляя найденные значения U2 , 1 1 cos QJ, а также
известные значения w 1 , w2 и G в ( 15.25), находим удель­
ную мощность потерь в образце.
Измерив потери при различных значениях магнит­
ной индутщии Вт , построим зависимость Рпо=НВт ).
Цифровой феррометр типа Ф5063, выпускаемый про­
мышленностыо, позволяет определять динамические ха­
рат<теристики магнитных материалов в диапазоне час­
тот 50-1000 Гц. Он имеет предеJIЫ измерения средних
значений напряжения 0,01-10 В, амплитудных значе­
ний тока 0,01-10 А. Погрешность измерений составляет
0,5-1 %. Диапазон регулирования фазы управ.'rяющего
напряжения 240°. Входное сопротивление измерительно­
го канала 1 МОм.
Получение магнитных характеристик с полющыо
электронно-лучевого осциллографа. Осци.rJлографичес­
кий метод исследования магнитных материалов на пе­
ременном токе удобен тем, что позволяет визуально на­
блюдать динамичес1<ие петли, а также производить из­
мерения магнитных характеристик в широком диапазоне
частот.
Схема установки для определения магнитных хараr,­
теристик осциллографичес,шм методом приведена на
рис. 15.17.
Установка состоит из электронно-лучевого осцилJю­
графа, на вход вертикального отклонения которого У
подано напряжение с выхода интегрирующей цепочки,
а на вход горизонтального отклонения Х - напряя\ение
U 1 , пропорциональное намагничивающему току i 1 • На­
магничивающий ток можно изменять с помощью регуля343
тора напряжения Т и измерять амперметром. Объект
иссле дооания - коJJьцевой образец с обмотками w1
И W2,
Напряжение и, =i1 R 1 , ИJJИ с учетом ( 15.14)
(15.27)
т. е. напряжение, подаоаемое на вход горизонта.т1ыюrо
откJJонения, пропорционаJ1ыю мгновенным значениям на­
пряженности.
В обмотке w2 наводится ЭДС
е2 = w2dФ/dt = w2sdВ/dt
(15.28)
[знак минус в ( 15.28) опущен, так как в рассматривае­
мом cJJyчae это не имеет значения].
Uc'--,-.--
.________V____,X
l
Рис 15 17 Cxe'>la устапош<И для 11сследова1111я магнитных матср11алов
осциллографичес1шм методом.
Сопротив.11ение р езистора R2 выбирается достаточно
боJJьшим, чтобы можно быJJо пренебречь остальными
сопротивлениями в этой цепп, поэтому ток равен:
i2 = e/R2 = (w2s/R 2) (dB'dt).
(15.29)
Напряжение на конденсаторе
ис =
-z- J i dt,
2
или, подставляя в подынтегральное выражение (15.29),
полу•1аем:
(15.30)
т. е. напряжение на входе вертю<аJ1ьного откJюнения
пропорuиона.11ьно мгновенным значениям индукции.
Таким образом, на экране электронно-лучевого осцил­
лографа будет воспроизводиться зависимость мгновен­
ных значений инду1щии от мгновенных значений напря•
женности поля, а это и есть петJ1я гистерезиса.
344
Для расчета значений Н1 и JJ 1 по осциллограмме не­
обходимо знать масштабы по rоризонтаJш и вертикали
т х и т у, В/см. Тогда по изnестным абсnиссам и орди­
натам измеряемой точки lx и l y, см, воспользовавшись
( 15.29) и ( 15.30), нетрудно определить Ht и Bt:
(15.31)
Ht = (wi/ lR1 ) тх lx;
(15.32)
В1 = (R2C/w2s}tny lv.
Погрешность измерения магнитных хараl{терисп11<
осцилJюrрафич�ским методом составляет несl{олько про­
центов.
15.7. ВАТТМЕТРОВЫй МЕТОД ОПРЕДЕЛЕНИЯ
ПОТЕРЬ НА ПЕРЕМАГНИlJИВАНИЕ
Из всех методов измерения потерь в магнитных ыа­
териалах ваттметровый метод, идея которого была пред.­
ложена М. О. Доливо-Доброво.1JЬским, получил наибо­
лее широкое распространение. Сущность метода состоит
в том, что мощность, показываемая ваттметром, вклю­
ченным в цепь катушки с магнитопроводом, складыва­
ется из мощности потерь на вихревые токи и гистерезис
и мощности, потребляемой обмотками образца и ИU при­
боров. Последнюю можно рассчитать и, вычтя из общей
мощности, найти значение потерь на вихревые токи и
гистерезис.
Аппарат для испытания э.11ектротехничсской стали
представляет собой четыре одинаковые катушки с дву­
мя обмотками. Катупши расположены так, что образу­
ют четыре стороны квадрата. В них за1<J1адываются па­
кеты, набранные из полос листовой эJJектротехнической
стаJш. Одна половина ПOJIOC нарезана вдоль, а вторая поперек проr<ата. Пакеты собираются, так что образуют
замкнутую магнитную цепь. Собранный аппарат пред­
ставляет собой трансформатор. Схема его ВI<J1ючения
изображена на рис. 15.18. Показания ваттметра в схеме
рис. 15.18 равны:
(15.33)
где 1 1 -ток в обмотке w 1; U2 - напряжение на выводах
w2; <р - угол сдвига фаз между ними.
Потери на гистерезис и вихревые токи аппарата мож­
но рассматривать как потери холостого хода транс фер22-970
345
матора. Они равны:
(15.34)
Рп = Е1!0 cos (fJ0,
rде Et - ЭДС в первичной обмотке; /0 - ток хо.юстого
хода, т. е. при разомкнутой обмотке w2; сро - фазовый
Рис. 15 18. Схема в1<.�ючения аппарата для определения ыагннтпых
потерь ватп1�тровым методом.
сдвиг между Е 1 и /0; /0 cos (f!o=loa - активная состав.'lя­
ющая тока холостого хода ( рис. 15.19, а).
Подключение к об!.ютке W2 вольтметра и пара.1лель­
ной цепи ватт:.1етра вызовет то1< /2• Этот ток можно счи­
тать <1исто актпвным, так как обычно активное сопро­
т1шJrсние указанных приборов нюшоrо бо.1JЬше индуI<­
тивноrо сопротивления втори•zной цепи. Протекающий в
nепи обмотки w2 ток /2 уве.rrичит в соответствии с прин­
ципом трансформации активную составляющую тш<а в
обмотке w1 на f2w2 /w1 (рис. 15.19, б). Новое значение
активной составляющей 'JOKa в обмотке ш, равно:
w
11 cos (fJ = /0 cos (j)0 + /2-2 ,
W1
откуда
foCOS(fJo=f1 COS(fJ-/9 w2
(15.35)
•
W1
Подставив ( 15.35) в (15.34) с учетом того, что Е 1
=E2w1/W 2 , ПОJiучим:
Pn = Е2 Wi /1 COS (fJ- Е/2,
(15.36)
W2
но
Е2 = V2 -1- f2R2
= и2 + и� � = V2 (1 +
2
=
�),
где l2=И2/R; R2- сопротивление обмотки w2; R=
316
=RvRul ( Rv+Ru) - общее сопротивление во.11ьтметра
и цепи напряжения ваттметра.
Выражая в ( 15.36) Е2 и /2 через U2, находим:
Рп
= [<V2'1 coscp) ...!!:i.._ _
Ш2
_u�] (t + ...&..)
или, после преобразований имеем:
R
R ,
i
w1
и�
и� ] ( l +-.
---R2 )
(Vzf1 coscp)w2
Rv
R
Ru
[
Обычно дробь R2 /R намного меньше единицы и ею
пренебрегают.
Из последнего выражения видно, что потери на гис­
терезис и вихревые токи равны мощности, измеrенноii
Рр
=
fop__
""7"
loa
�}
r;:?
Pi1c. 15. 19. К оттреде.пению по7ерь ваттмстровым методом.
Pn/f
Io
loc
о
б)
r,
f;
f
Рис. 15.20. Графическнй способ
разде.пения потС'рь.
ваттметром и умноженной на коэффициент трансформа­
ции w 1/w2 за вычетом мощностей, потреб.пяемых вольт­
метром и цепью напряжения ваттметра.
Таким образом, удельные потери на гистерезис и впх­
ревые токи можно рассчитать по формуле
Рпо = [Р117 ::-(Pv+Pи)]!G.
(15.37)
Магнитную индукцию, при которой измерялись по­
тери, рассчитывают по форму.пе
(15.38)
вт = Ui4kф {U'2S,
где kФ = 1,11 для синусоидальной формы кривой индук­
цип.
Иногда возникает задача раздеJ1ения потерь. По·
22*
347
скольку потери на гистерезис пропорциональны первой
с1епени частоты, а потери на вихревые токи - квадра­
ту частоты, то полные потери можно представить в ви­
де суммы двух cJiaraeмыx:
2
(15.39)
Prr = af + bf •
Если обе части ( 15.39) разделить на частоту, то
(15.40)
Pnlf =а+ Ьf.
Оnредешш потери при одном значении индукции на
двух частотах f 1 и f2 , строят no ( 15.40) график (рис. 15.20).
По измеренным значениям Р11 и найденным из по­
строенного графика rюэффциентам а и Ь вычисляют.
потери на гистерезис и вихревые токи. Например, для
частоты f I они равны:
(15.41)
prl =afi;
( 15.42}
рвl = bff.
Метод применим в диапазоне частот, где поверхност­
ный эффеrп выражен еще Ciiaбo. Для обычной Jiи,товой
электротехнической стали то.пщиной 0,35 и 0,5 мм мак­
симальная частота при разделении потерь состав.п51ет
80-100 Гu.
15 8 ЛАБОРАТОРНАЯ РАБОТА № 14
ИЗМЕРЕНИЕ 1-IАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ
И МАПIИПЮИ ИНДУКЦИИ
Измерение напряженности маr1rитно�-о поля. В да.иной работе
nроюводится измерение напряженности маrнитно,·о поля внутри
стержневого nостошнюго магнита вблизи его полюсов и11дукцион­
но-11мпульспым методом. Для этого сначала определяют цену деле1шя баллистического гальванометра С Ф с включенной в его цепь
1<атуш1<011 для измерения напряжетrос·rи поля, 1<ак это описано в
§ 15.2 [см. рис. 15 2 и ( [5.7)]. Затем нахо;�.ят постоянную измерн­
тельной 1<атушки. Длн этого предварителыю измеряют напряже111юсть поля Но внутри катушю, СК с 1юмошыо измерителя 11апрю11.с11ности магнитного поля, действие которого основано на явлении
ядернш·о магнитного резонанса. Е,·о устройство и принцип работы
описаны в § 15.3. Погрешность измерений этим методом очет, мала
и не превышает 0,01 % при условии, что nоле достаточно однород­
пое и стабильное. Для достижепш1 приемлемой д.�я измерений од­
нородности поля отношение среднего диаметра катуш1<И СК 1< ее дли­
не выбрано рзвным 0,7. Область однородного поля находится вбли­
зи центра катупll{И СК. I·lамагничивак;щий ток катуш1<И сгаби:шзнро•
ван.
Постоянную измерительной катушки k оnределнют способом,
оп исанным в§ 15.3 [формула (15.[ l)J.
348
И, наконец проводят измерение напряженного поля внутри маг•
нита вблизи ero лотосов по методике, изложенной в § 15.3 [фор­
мула (15.10)].
Измерение маrнитнои индукции. В данной работе производится
измерение магнитной индукции внутри стержневого постоянного
магнита, о котором говорилось вьnuе, индукционно-имnулъспым ме­
тодом (баллистический гальванометр II вебсрметр), а также изме­
рение магнитной ипду�щни внутри упо\1янутой выше катушки с по­
мощью тесла,1етра.
Измерение магштюй индукции инду1щионно-имnульсным ме­
·rодом начинают с определения цены де.пения (постошпюй) балли­
стического гальванометра С Ф с вклю,Jенной в его uепь t<aT) шкой
для измерения магнитной индукции по методике, пр1шсдеипой в
§ 15.2 [с�1. рис. 15 2 п (15.7)]. Катушка для из,1ерення магнитной
ющукции конструктивно отличается от 1,ат)rшRи для измерения па­
nр11женност11 поля II может иметь другие параметры s 11 Wн. Затем,
пользуясь описанным в § 15.2 и 15.3 способом, пзмеряют маruитиую
индукцию внутри магнита вблизи полюсов баллистическим гальва­
нометром 11 веберметром
Для из�1ерепия маrнит1ю11 11ндукции в11}три Rатушки применя­
ют тесламетр с преобразователем Холла. Его устройство и принцип
действия описаны в § 15.3. Индукuию иJмернют в тoii же централь­
ной части r<атушь:и Cii., rде ранее измерилась напряженность.
Задание
1. Оэиа�юю1ться с приборами, имеющимися па лабораторном
стенде, а также с уr<азания,ш по нх эксплуатации. Внести в про­
токол паспортные данные пр11боров.
2. Опреде,qить цену деления (постоянную) ба,1лист11Ческоrо
гальванометра при включении в его цепь катушю1 для измерения
напряженности магнитного поля.
3. Измерить напряженность магнипюrо поля внутри катушки
С[( с помощью измерите;ш иапряженност11 магнитного поля.
4. Определить постоянную 1<атушю1 для измерения напряженно­
сти магнитного поля.
5. Измерить напряженность маr1штнш·о no.151 внутри стержне­
вого постоянного мапrита вбт1з11 его 110люсов инду�щионно-импу;1ьс11ым методом с по�ющью балл11ст11чес1шrо rальваноа:етра
6. Определить цену деления ба;1лнстичесRоrо 1·альванометра
при включении в его цепь 1<атушки длн измерения �1аrнитноii ин­
дукuин
7. Измерить магнитную индуютю внутри стержн2вого постоян1юго мапшта вб.чизи его полюсов индукционно-имnу,qьсным методом
с помощью баллистичес,юrо гадьванометра
8. Из}1ерить мапiИТН)'Ю индукцию внутри стержневого nостоян­
ноrо магнита вблизи его полюсов шщукцнонно-нмnуJJьсным методом
с помощъю всберметра. Сопоставитъ результат с результатом, по­
лученным в п. 7.
9. ИJмерить магнитную 1шду1щ,1ю внутри r<aтywRи СК. с помощью
тесламетра.
10. Рассчитать магнитную индукцию внутри катушки С[( no дан.
11ым, nоJiуче11ным в n. 3. Сопостави-:-ь результат рас11е1а с резу.%­
татом, полученным в n. 9.
11. Составить отчет по требуемой форме.
349
ГЛАВА ШЕСТНАДЦАТАЯ
ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕС­
КИХ ВЕJJИЧИН
161. ОБЩИЕ СВЕДЕНИЯ ОБ ИЗМЕРЕНИЯХ
НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
При контроае техно.rюrических процессов и в науч­
ных исследованиях приходится производить измерения
различных неэлектрических веJiичин. Разновидностей
электрических приборов для измерения неэлектрическнх
величин значительно бо.JJьше, чем приборов ДJlЯ измере­
ния электрических величин. Это обусловлено тем, что
1ю.1Jичество контролируемых неэле1<тричес1шх величин
значительно превышает количество электрических ве­
.1Jичин.
В бо.'Jьшинстве с.JJучаев целесообразно из:\1ерять не­
электричесю1е ве.,'Iичнны электричес1шми приборами. Это
объясняется тем, что электрические величины легче, чем
неэлектрические, можно передавать на сравнительнu
большие расстояния, над электричес1п1ми величинамп
можно проводить различные математические операции,
что поJволяет автоматически вводить в результаты из­
мерении поправки, интегрировать и днфференцировать
результат и т. д. Электрические величины легко регист­
рировать.
ЭJiектричес1,ие приборы дJIЯ измерения неэле1приче­
ских величин обязательно содержат измерительный пре­
образователь неэле,прической величины в электриче­
скую (ИП).
Измерптельный преобразователь неэлектрической ве­
J1ичины в эJ1е1сrрическую устанавливает однозначную
функциона.'Iьную зависимость выходной электрическОli
величины, например ЭДС, от входной измеряемой не­
электрической веJшчины (температуры, перемещения
и т. д.).
На рис. 16.1 показана упрощенная структурная схе­
м а э.JJе1сrричес1юго прибора ДJIЯ измерения неэлектриче­
ской величины. Измеряемая неэ.JJектрическая величина
х подается на вход ИП. Выходная электрическая вели­
чина у преобразователя измеряется электрическим из­
мерительным устройством ЭИУ. Обычно шкала элект­
рического измерительного устройства градуируется в
единицах измеряемой электрической веш1<1ины.
350
На рис. 16.2 в качестве примера показан электриче­
ский прибор, предназначенный для измерения темпера­
туры. В этом приборе: ТП - термопара, ЭДС которой
является функцией измеряемой В€'-1Iичины температуры,
mV - ми11ливо11ьтметр для измерения ЭДС термопары.
В данном случае термопара - ИП, а милливольтметр э11ектрическое измерительное устройство.
�
Рис. 16.1. Упрощенная струк­
турная схема электрического
прибора для из.,,ерсния неэлек­
тричес1юй вет1чнны.
�
�
Рис. 16 2. Прииuиnиальная схе­
ма электри•1ескоrо прибора д.ЯIJ
измерения температуры.
Широ1<0 применяются таюке электрические приборы ,
в которых измеряемая неэлектрическая веш1чина под­
вергается нескольким последовательным преобразованн­
ям. В качестве предварительных преобразователей час­
то испо11ьзуют неэ.Jiектрические измерите11ьные механиз­
мы, преобразующие измеряемую неэлектрическую вели­
чину в перемещение подвижной части этих механизмов.
Перемещение подвижной части преобразуется ИП в
э11ектрическую величину.
16.2. ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНЫХ
ПРЕОБРЛЗОВАТЕЛЕИ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
Зависимость выходной величины ИП у от входной х
(см. рис. 16.1) в общем виде выражается уравнением
преобразования y=F(x). Уравнение преобразования
(функция преобразования) для некоторых ИП извест­
но, а для других функцию преобразования nрнходится
находить экспериментально, т. е. прибегать к градуиров­
ке ИП. Результаты градуировки выражаются в виде таб­
JIИЦ, графиков или аналитически.
При оценке и сравнении ИП необходимо учитывать
их следующие основные хара�<теристики:
1. Постоянство во времени функции преобразования.
При изменении с течением времени функции преобразо­
вания приходится повторять градуировку, что крайне
нежелательно, а в не1шторых случаях невозможно.
351
2. Вид функции преобразования. Обычно наиболее
желатеJ1ен линейный характер зависимости у=Р(х).
Многозначность ИJIИ разрыв функции преобразования
указывают на непригодность ИП дJ1я работы п данном
интервале нзменения измеряемой веJ1ичины.
3. Погрешность и чувствитеJ1ьность. Основная по­
грешность ИП - это погрешность при нормальных усJю­
виях, т. е. при номинальных значениях влияющих вели­
чин. Дополнительная погрешность ИП - это погреш­
ность, обусJ1овле1111ая отклонением одной из влияющих
величин от номинального значения.
4. Обратное воздействие преобразователя на изме­
ряемую величину. Пояснить это можно на примере тер­
мопреобразователя сопротивления; известно, что он
представляет собой термочувствительный резистор, по­
мещенный в среду, температура которой измеряется.
Изменение температуры среды вызывает изменение тем­
пературы, а следовательно, и сопротивления терморези­
стора. Для измерения сопротивления терморезистора по
нему необходимо пропускать электрический ток. Ток на­
гревает терморезистор и таким образом увею1чнвает тем­
пературу окружающей среды. В этом проявляется об­
ратное воздействие преобразователя на измеряемую ве­
.'Iичину. Обратное влияние на практике у•1есть трудно,
поэтому стараются его сделать минимальным.
5. Динамические свойства преобразователя. Прп из­
менении входной велиуины в ИП возникает переходный
процесс, характер которого зависит от наличия в пре­
образователе элементов, запасающих энергию (переме­
щающихся деталей, конденсаторов, катушек индуктнв­
ности, детаJ1ей, обладающих теплоемкостью, и т. д.).
Переходный процесс проявляется в виде инерции - за­
паздывания реакции ИП на изменение входной величи­
ны. Например, при погружении термопары в среду, тем­
пература которой пзмеряется, термо-ЭДС на выходе
термопары будет соответствовать измеряемой темпера­
туре только по истечении неко1·ороrо промежутка вре­
мени. При измерении быстро изменяющихся величин ИП
работает в нестационарном режиме, а поэтому при оцен­
ке ЕаLJества ИП необходимо учитывать их динамические
характеристики, которые в значительной мере опреде­
ляют точность измерения. ОбыLJно от nреобразоватеJ1я
требуется, чтобы вносимое им запаздывание в процесс
преобразования было минимальным.
352
Кроме рассмотренных свойств при оценке ИП учи­
тываются также и другие показатели: влияние внешних
факторов, например температуры, давления и вибрацпи,
взрывобезоnасность, устойчивость к механическим, тер­
мическим, электрическим и другим перегрузкам, удоб­
ство монтажа и обслуживания, габариты, масса, удоб­
ство градуировкп, стоимость изrотовJ1ения и э1<сплуата­
ции, надежность и т. д.
16.3. КЛАССИФИКАЦИЯ ИЗМЕРИТЕЛЬНЫХ
ПРЕОБРАЗОВАТЕЛЕЙ
По принципу действия все ИП подразделяются на
следующие группы:
Резистивные из111ерительные преобразователи. Эти
ИП подразделяются на реостатные и тензочувствитель­
ные.
Работа резистивных ИП основана на изменении эле1<­
трическоrо сопротивления в зависимости от перемеще­
ния движка по электричесl{ому проводнику (реостатные
преобразователи) или от механической деформации про­
водника или полупроводника ( тензометрические ИП).
Резистивные ИП применяются для измерения пере­
мещений, а таюке ве.rшчин, которые могут быть преоб­
разованы в линейное и уrловое перемещение тел, а имен­
но: давлений, сил, вращающих моментов, уровня жид­
костей, ускорений и т. д.
Электромагнитные uзАtерительн.ые преобразователи.
Они подразделяются на индуктивные, взаимоиндуктив­
ные, магнитоупругие и индукционные.
Индуктивные и взаимоиндуктивные ИП представJ1я­
ют собой катушку индуктивности или взаимной индук­
тивности, параметры которой изменяются под воздейст­
вием измеряемой величины. Магнитоупругие ИП пред­
ставляют собой разнов_идность индуктивных ИП с замк­
нутым магнитопроводом, а индукционные ИП-I{атушку,
в которой наводится ЭДС при ее перемещении в по­
стоян1юм магнитном поле.
Электромагнитные ИП применяются для измерения
скорости, линейного и yrлorюro перемещения, а также
тех величин, которые могут быть преобразованы в пере­
мещение.
Электростатические из11tерительн.ые преобразователи.
Они подразделяются на емкостные и пьезоэле1,трические.
353
К емкостным относятся ИП, у которых электричес1<ая
емкость или диэлектричес1ше потери в ней изменяются
под действием измеряемой величины. Работа пьезоэлек­
трических ИП основана на пьезоэлектрическом эффе к­
те, т. е. возникновении ЭДС в некоторых кристаJiлах
под действием механических сил.
ЭJ1ектростатические ИП применяются для измерения
силы, давления, перемещения и коJ1ичества вещества.
Тепловые измерительные преобразователи. Их дей­
ствие основано на тепловых процессах - при нагреве,
охлаждении, теплообмене и др.
Тепловые ИП подразделяются на терморезисторы и
термоэлектрические ИП. В терморезисторах использует­
ся зависимость сопротивления проводника или полупро­
водника от температуры. Действие термоэлектрнчес1\ИХ
ИП основано на возникновении ЭДС при нагреве или
охлаждении спая двух разнородных проводников.
ТепJювые ИП применяются преимущественно для из­
мерения температуры, а также скорости и расхода жнд­
ю1х и газообразных веществ, малых концентраций газов
(вакуум), влажности, перемещения, размеров и даже
для химического анализа газовых смесей.
Электрохимические измерителыiые преобразователи.
Действие этих ИП основано на явлениях, возникающих
при прохождении электрического тока через электроли­
тическую ячейку ИJiи вс.ледствие окис.rштелыю-восстано­
вительных процессов, происходящих на эле1,тродах. Они
применяются дJIЯ определения состава и концентрации
растворов, а таюке для измерения перемещения, давле­
ш1я и количества электричества.
Ионuзачионные uз1,1,ерительные преобразователи. Их
работа основана на явлениях ионизации газа при про­
хождении через него ионизирующего излучения и.11и .1110минссцснции (свеqсния) некоторых веществ под дейст­
вием ионизирующего излучения. Ионизационные ИП при­
меняются для измерения плотности и состава газа, гео­
метрических размеров изделий и т. д.
Фотоэлектрические измерительные преобразователи.
Основой их действия являетс я зависимость фототока от
светового потока, который, в свою очередь, зависит от
измеряемой величины. Область их применения - изме­
рение прозрачности жидкости, газовой среды, темпера­
туры и линейных размеров тел.
По роду выходной электрической величины ИП под354
разделяются на па раметрические и rенера\.орные. ЕсJш
входная неэлектрическая веJшчина преобразуется в один
из параметров электрической цепи R, L или С, то ИП
называется параметрическим, если неэле]{трическая ве­
личина преобразуется в ЭДС, то ИП назы вается. генера­
торным.
К генераторным ИП относятся индукционные, пьезо­
электрические, термоэле1<трические и некоторые разно­
видности электрохимических ИП. Остальные :ИП явля­
ются параметрическими.
Рассмотрим принцип действия и основные свойства
наиболее распространенных ИП.
16.4. РЕЗИСТИВНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
Реостатпые измерительные преобразователи. Реостат•
ный ИП представляет собой в простейшем случае рео•
стат, щетка (движо1<) которого перемещается под воз­
действием измеряемой неэлектрической веJiичины
(рис. 16.3). Преобразователь состоит из обмотки, нане-
Рис. 16 3. Устройство реостат•
иоrо преобразователя дш1 изме­
рения у1·Jювых перемещений.
Рис. 16 4. Фуикциоиальиый ре--­
остатный преобразователь.
v - устройство; 6 - rраф11к11 заuи­
снмостн его выходных соnротивле�
111111 от пере,1ещення двнжка.
R
Ro
oJ
Хбх
сенной на каркас, и щетки. Форма каркаса зависит от
характера измеряемого перемещения (линейное или уг­
ловое) и от вида функции преобразования (линейная,
нелинейная) и може т иметь вид циJ1индра, тора, приз­
мы и т. д. Для изготовления каркасов применяются
диэле1прики (гетинакс, пластмасса, керамика) и метал­
JJЫ (дюралюминий с анодированной поверхностью), по•
крытые изоляционным лаком.
355
Проволока для обмотки выполняется из сплавов с
маJ1ым температурным коэффициентом сопротивления.
Дешевыми и часто используемыми материалами служат
константан и манганин. СоnротивJiение обмотки колеб­
лется от десятков до нескольких тысяч ом. Провод обыч­
но изолируют эмалью или оксидной пленкой. После из­
готовления обмотки изоляция провода очищается в ме­
стах соприкосновения его со щеткой.
Щетка ИП выполняется или из nрово1юю1, юш из
n.r.оских пружинящих полосок, причем используются как
чистые металлы (платина, серебро), так и сплавы (nJrа­
тина с иридием, фосфористая бронза и т. д.). Качество
контакта щетки и обмотки определяется контактным
давлением, которое находится в пределах от тысячных
долей до нескольких ньютонов в зависимости от мате­
риалов контакта и обмотки и условий работы ИП.
Для получения нещшейной функции преобразования
применяются функциональные реостатные ИП. На рис.
16.4 приведены пример такого ИП и графики зависимо­
сти его выходных сопротивлений R, и R2 от переме ­
щения движка Xnx•
Температурная погрешность определяется прежде
ncero те�шсратурным коэффициентом сопротивления
провода, который, как правило, меньше 0,1 % на 10° С.
Достоинством реостатных ИП является большая вы­
ходная мощность. Недостаток - наличие трущегося кон­
такта.
Выходной параметр реостатных ИП - сопротивле­
ние - измеряется обычно с помощью мостовой схемы с
Jюrометром в измерительной диагонали. Применение
автоматических самоуравновешивающихся мостов, как и
мостовых схем с лоrометром, позволяет избежать влия­
ния коJ1ебаний напряжения источника питания и, кроме
того, практически искJ1ючает влияние переходного кон­
такта между движком и обмоткой ИП.
Реостатные ИП применяются для из�1ерения угловых
и линейных перемещений и тех ве1111чин, которые мoryr
быть преобразованы в эти перемещения (усилия. даtJлс­
ния, уровни и объемы жидкостей и т. д.). Реостатные ИП
применяются также в качестве прецизионных регулиру­
емых резисторов (реохордов) в автоматических мостах 1I
компенсаторах.
Пример применения реостатного ИП для измерення
уровня или объема жидкости показан на рис. 16.5. U р1::356
зультате изменения положения поплавка, определяемого
уровнем или объемом жидкости, изменяется положение
щетки ИП, что вызывает изменение сопротивлений ре­
зисторов R1 и R 2 , включенных через добавочные резисто­
ры Rц1 и Rд2 последовательно с рамками лоrометра_ В
результате изменяются отношение токов в рамках лоrо­
метра и его показания. Шкала логометра rрадунрустся
в значениях измеряемой величины объема или уровня
жидкости.
Тензо'lувствuтелы-1.ые из1r1ерuтельные преобразовате­
ли (тензоµезисторы). Работа тензорезисторов основана
Rд2
-IA
1
Рис. 16.5. Cxe�ra уровне�1ера.
Рис. 16.6. Устройство проволоч­
ного тензорезистора.
на зависимости электрического сопротивления проводни•
ка или полупроводника от создаваемого в нем механи­
ческого напряжения. Они подразделяются на металличе­
ские и полупроводниковые. Из металлических тензоре•
зистороn наиболее распространены проволочные и
фольговые. Если проволоку подвергнуть механическому
воздействию, например растяжению, то сопротивление ее
изменится. Относительное изменение сопротивJ1ения про­
волоки
ЛR!R = k1.lll,
где k - коэффициент тензочувствителыюсти; Лl/l - от­
носительная деформация проволоки.
Изменение сопротивления прово.,юки при механиче­
ском воздействии на нее объясняется изменением геомет­
рических размеров (дJ1ины, диаметра) и удельного со­
противления материала.
Проволочные тензорезисторы представляют собой
тонкую зигзагообразн ую проволоку 2, называемую ре­
шеткой, приклеенную к полос1{е бумаги (nодлож1<е 1)
357
(рис. 16.6). В качестве подложки испоJiьзуется тонкая
(О,03-0,05 мм) бумага, а также nJieнкa лака или клея,
а д11я работы при высоких температурах - слой цемента.
ПpOI:.'()JIOKa вместе с подлож1<0й накJiеивается на деталь.
Тензопреобразовате11ь включается в схему с помощью
nрпвариваемых или припаиваемых выводов 3. Он накле­
пвается на поверхность исследуемой детали так, чтобы
направJ1енне ожидаемой деформации coвnaдaJIO с осью
длинной стороны петеJiь проволоки. При деформации де­
тали сопротивJ1ение проволоки изменяется.
Тензопреобразователи в зависимости от назt1ачения
имеют раз:шчные размеры. Длина пет11и (базы )1 (рнс.
16.6) у тензопреобразователя колеблется от 0,5 до
150 мм, ширина /1 чувствительного элемента - o·r 0,8 до.
60 мм. Сопр отивление тензопреобразователя чаще всего
составляет 50-200 Оы.
ОтноситеJ1ьная деформация провоJюки тензопреобра­
зователя Лl/l равна относительной деформации детали
Лlд/lд, на которую наклеен тензопреобразователь. По­
СJiедняя связана с механическим напряжением в детали
а и модулем упругости материала этой детали Е соот­
ношением
Лlд/lд = а/Е.
Таким образом, уравнение преобразования тензопре­
образова теля можно представить в виде
ЛRIR =ka!E.
Основные требования, предъявляемые к материалу
провоJIОки, следующие: возможно боJ1ьшее значение k,
малый температурный коэффициент сопротивления
(ТКС), высокое удельное электрическое сопротивление.
Для изrотов,1ения тспзопреобразователей применяет­
ся rJ1авпым образом проволока диаметром 0,02-0,05 мм
из константана, и�1еющего коэффициент k= 1,972,l.
Константан обJ1адает малым ТКС, что очень важно, так
как изменение сопротивления тензоnреобразоватС'лей при
деформациях, напрпмер, стальных деталей соиз)'1ери-;v,о
с изменением сопротивJ1ения тензопреобра.юпателя при
изменении температурных условий.
У фольговых тензопреобразователей чувстшrтс.r�ьный
э.r�емент получают путем травления фольги, 1щна сторо­
на которой покрыта лаком или клеем. При травлении из
фо.r�ьги выбирается часть металла таким образом, что
358
оставшийся металл образует чувствительный элемент не­
обходимой формы и сопротивления (рис. 16.7).
Фольговые тензопреобразователи допускают 66.rrь­
шую мощность рассеяния, так как металл тензопреобра­
зоватеJ1я имеет хороший тепловой контакт с объе1пом.
Они имеют надежный механический контю{т с поверх­
ностью объекта и могут быть изготовлены nракти·1ески
J1юбой формы и размеров.
В последнее время промышленностью вы,1усю,юrся
также тензоnреобразователи из монокрист-1.шов по.1у­
проводников-J{ре!'l1ния, гер­
мания, арсенида галлия и
др, Ценным свойством та­
ю1х тензопреобразователей
является большое значение
Рис. 16 7. Контур решетки
ф0J1ьгового тензорезистора.
коэффициента k (от -200 до +850). Однако они име­
ют низкую механическую прочность и плохую воспроиз­
водимость характеристик.
Накпеенный тензочувствительный ИП невозможно
снять с одной детали и наклеить на другую. Поэтому для
определенпя функции преобразования (коэффициента
k) прибегают к выборочной градуировке ИП, т. е. из
партии одного и того же провода изготовдяют серию
тензорсзисторов и градуируют нес1<олько штуt< (восемь­
десять). Полученное среднее значение коэффициента k
принимается для всех ИП данной серви.
Основная погрешность тензоnреобразователей во
многом оnреде.Тiяется точностью градуировки. При инди­
видуальной градуировке, проводимой непо.;редственно
на исследуемой детали, основную погрешность можно
уменьшить до 0,2-0,5% п даже менее.
Температурная погрешность тензоnреобразователей
обусловлена разностью температурных коэффициентов
линейного расширения материала преобразователя и
объе1<та измерения, а также ТКС материала преобразо­
вателя.
Для измерения сопротивления тензоnреобразователей
в подавляющем большинстве случаев применяют неурав­
новешенные мостовые цепи с питанием постоянным или
пере.1.1енным током. Предпо•пение отдается цепям с диф�
359
ференциальным включением тензолреобразователей, в
которых один тензорезистор R:r испытывает деформацию
растяжения, а второй R�, включенный в смежное плечо
моста,-деформацию сжатия (рис. 16.8). При таком
в1<лючении практически исключается температурная nо­
rрешность и вдвое увеличивается чувствительность .
..----Q
Ro
а)
и_ о---.,
RJ
F
о)
Рис. 16.8. Измерение деформации изrибающеf!ся балки.
а - крепление тензорезнс.торов на баJ1ке;
l/lOCTOB)'IO
цепь.
б - вк11юче1ше тензорезнсторов в
Тензопреобразовате.'lи применяются для измерения
сил, давлений, вращающих моментов, ускорений и дру­
гих величин, преобразуемых в упругую деформацию.
ТензопреобразоватеJIИ широко применяются для измере­
ния как статических, так и переменных во времени де­
формаций.
16.5. ЭЛЕКТРОМЛГНИТНЫЕ ИЗI\\ЕРИТЕЛЫIЫЕ
ПРЕОБРАЗОВАТЕЛИ
Иf�дук.тивн.ые и взашлоuн.дуктивн.ые (трансфорлштор­
ные) измерительные преобразователи. Индуктивный ИП
nредстаrшяет собой катушку индуктивности, а трансфор­
маторнь1й - катушку взаимной .индуктивности, парамет­
ры которой изменяются под воздействием входной вели­
чины.
Рассмотрим катушку индуктив­
ности, изображенную на рис. 16.9,
приняв, что вторая обмотка отсут­
ствует, т. е. W2=0.
В первом приближении, если
Рис. 16.9. Маrиитоnровод с зазором и дву•
мя обмотками.
360
пренебречь аl{тивным сопротивлением катушI<и и маг­
нитным сопротивлением магнитопровода, индукт ивность
ИП можно выразить следующим образом:
L = w�IR6 = wy µ0 slб,
где w1-чисJю витков l{атушl{и; Rб =б/µоs- магнитное
сопротивление воздушного зазора; б - длина воздушного
зазора; µо-магнитная постоянная, равная 4:rt· 10-7 Гн/м;
s - площадь поперечного сечения воздушного участка
маrпитопровода.
Коэффициент взаимной индуктивности обмоток, рас­
положенных на том же магнитопроводе (рис. 16.9),
М = w1w2/R(J = w1w2 µ 0s/б,
где W 1 и w2 - число витков первой и второй uбмоток
Приведенные соотношения показывают, что коэффи­
циенты самоиндукции и взаимоиндукции можно изме­
ннть, воздействуя, например, на длину воздушного зазо­
ра магнитопровода б и сечение воздушного учасп:а
магнитопровода s.
Рис. 16.10. Индуктивные и трансформаторный преобразоватет1.
а - од11нар 11ый и11дукт11в11ый; б- двфференциальныr� 11ндукт1Шный; в -днффе­
рещ�иальный трансформаторный.
На рис. 16.10, а - в схематически поI<азано неСl{ОЛЬ­
ко типов различных ИП.
Инду1<Тивный ИП (рис. 16.10, а) представляет собой
эле1<тром агнит 1 с обмотl{ОЙ 2 и подвижным якорем 3,
перемещающимся под действием измеряемой величины
х. Изменение д.пнны воздушного зазора б приводит 1{
изменению индуктивности обмопш L. Зависимость L=
=Р(б) не.l!инейная. Та1<0й ИП обычно применяется при
перемещениях якоря на 0,01-5,0 мм.
23-970
361
ЯJ(орь в индуктивном ИП испытьшает усилие притя­
жения со стороны элеl(тромаrнита. Этот недостаток в
значительной мере устранен в индуктивных дифферен­
циальных ИП (рис. 16.10, 6), у которых с перемещением
якоря увеличивается индуктиnность одной катушки и
уменьшается индуктивность другой. Силы притяжения,
действующие на якорь со стороны двух электромагни­
тов, приблизительно равны друг другу и взаимно урав­
ноnешиваются.
Дифференциальный ИП имеет более высокую чувст­
витеJ1ыюсть, чем обычный ИП, меньшую нелинейность
фун1щии преобразования и меньшую погрешность от
влияющих nеличип.
Дифференциальный ИП обычно включают в два
смежных плеча мостовой цепи (рис. 16.11). Перед нача­
лом измерений у.ост ураnновешивают.
s
L+t:.L
R
Нс J... С
L-лL
1
и~
•
,/
@--@
Рнс 16.11. Мостовая цепь с
дифференциальным преобразо­
вателем.
Рис. 16.12. Усrройсrво 11нду1{•
ционного преобразователя.
Резистор Rc и конденсатор С сJ1ужат для уравнове­
шивания моста по реактивной составляющей, а резистор
Ro- по активной. Если относительное приращение ин­
дуктивностей ЛL/L мало, то напряжение Ид в измери­
тельной диагонали моста будет приблизительно пропор­
ционально перемещению якоря. Напряжение Ид измеряют
магнитоэлектрическим
мил.nивольтметром,
ПОДJ(ЛЮ­
ченным к диагонали моста через усилитель У и фаза­
чувствительный выпрямитель ФВ. Направление то1{а на
выходе фазочувствительноrо выпрямителя определяется
направлением перемещения якоря.
В дифференциальных трансформаторных ИП (см.
362
рис. 16.1 О, в) две секции первичной обмотки, через кото­
рую пропускается переменный ток /, включены соглас­
но, а две се,щии вторичной - встречно. При симметрич­
ном пОJюжеиии якоря относительно электромагнитов
ЭДС на выходных зажимах равна нулю. Перемещение
якоря вызывает сигнал ЛЕ=F(х). Выходное напряже­
ние ИП усиливают и измеряют прибором переменного
тока.
Выходной сигнал индуктивных и трансформаторных
ИП 06J1адает значительной мощностью, что позволяет в
некоторых случаях обходиться без усилителей. Преобра­
зователи просты по конструкции и надежны в работе.
Промышленностью выпускаются индуктивные и
трансформаторные ИП для измерения перемещений от
неско.пышх микрометров до десятков сантиметров. Они
находят применение в микрометрах, толщиномерах, уров­
немерах, а таюке в приборах для измерения усилий,
давлений, крутящих моментов и других величин, кото­
рые могут быть преобразованы в перемещение.
Индукционные измерительные преоf5разаватели. В
индукционных ИП используется за1юн электромап-1итной
инду,щии, согласно которому ЭДС е, индуцированная в
катушке из w вит1<0в, равна:
e=-wdФldt,
где dФ/dt - с1<0рость изменения магнптноrо потока,
сцепленного с катушкой.
Индукционные ИП применяются для измерения ско­
рости линейных и угловых перемещений.
Выходной сигнал индукционных ИП может быть
проинтегрирован или продифференцирован во времени
с помощью электрических интегрирующих или диффе­
ренцирующих устройств. После этих преобразований
сигна.rr становится пропорциональным соответственно пе­
ремещению ИJIИ ус[{орению. Поэтому индукционные ИЛ
исnо.rrьзуются та1<же для измерения линейных и угловых
перемещений.
На рис. 16.12 показано устройство индукционного ИП
для измерения С[{Орости линейного перемещения, а та1<же
амплитуды перемещения и ус[{орения. Преобразоnатель
представляет собой ци.rrиндрическую катушку J, переме­
щающуюся в КОJ1ьцеnом зазоре магнитопроnода 2. Ци­
.rrиндрический постоянный магнит 3 создает в 1<0J1ыtевом
зазоре постоянное радиальное магнитное пo.rre. Катуш[{а
2 3*
363
при перемещении пересекает силовые Jшнии магнитного
поля, и в ней возниr<ает ЭДС, пропорциональная ско­
рости перемещения.
Наибольшее применение индукционные ИП подучили
в приборах дJiя измерения частоты вращения (тю,;.омет­
рах) и в приборах для измерения пг.раметров вибраций,
т. е. дJ1я измерения ,чинейных и угловых перемещений и
ускорений ( в виброметрах и акселерометрах).
Индукционные ИП для тахометров представ.ляют со­
бой небоJiьшие ( 1-100 Вт) генераторы постоянного или
переменного тока обычно с независимым возбуждением
от постоянного магнита, ротор которых механически свя­
зан с испытуемым ваJiом. При использовании генератора
постоянного тока о скорости вращения ваJта судят по
ЭДС генератора, а в случае применения генератора пе­
ременного тока скорость можно определить как по са­
мой ЭДС, так и по ее частоте.
Погрешности индукционных ИП определнются, rJiав­
ным образом, изменением магнитного поля с течением
времени и при изменении температуры, а также темпе­
ратурными изменениями сопротив.rJения обмпток. Значе­
ния погрешностей находятся в предеJiах 0,2-0,5%. До­
стоинства ИП заключаются в сравнительной простоте
конструкции и высокой чувствительности.
16.6. ЭЛЕКТРОСТАТИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ
ПРЕОБРАЗОВАТЕЛИ
Емкостные измерительные преобразователи. К ем­
костным относятся ИП, у которых электрическая ем­
кость ИJIИ диэлектрические потери в ней изменяются под
действием измеряемой ве.rJичины.
Емкость С между двумя параJr.лельными проводящи­
ми плоскостями пJiощадью s, раздменными ма.rJым зазо­
ром б, без учета нраевоrо эффекта определяется выра­
жением
С= Бuеs/б,
где ео- диэлектрическая постоянная, равная 8,85Х
Х 10-12 Ф/м; в - относите.rJы1ая. диэ.rJектрическая прони­
цаемость среды между эJ1ектродами.
Изменяя в, s ИJJИ б, можно изменять электричесl(ие
параметры преобразоватеJrя.
На рис. 16.13, а, 6 схематичес1ш показаны устройства
разJшчных ИП.
364
Преобразователь на рис. 16.13, а представляет собоl1
конденсатор, одна пластина которого перемещается по,1
действием измеряемой величины х относительно непод•
вижной пластины. Изменение расстояния между пласти­
нами 6 ведет к изменению емкости ИП. Фун1щия преоб•
разовапия C=F(6) нелинейна, что ограничивает диапа­
зон изменения 6. Чувствительность ИП резко возраста­
ет с уменьшением расстояния б, поэтому такие :ИП
используются для измерения малых перемещений (менее
1 мм). При выборе начального расстояния между пла­
стинами необходимо учитывать пробивное напряжени е
воздуха, равное 10 1<В/см.
Фующии преобразования C=f(s) и С=f(в) линей­
ные. Поэтому ИП с изменяющейся площадью пластин
а)
о)
Рис. 16.13 Ем1<0стные преобразователи.
.а - од11нар1шй; 6 - д11фференцнапь11ы1!
mрименнются дJIЯ измерения больших линейных (более
1 см) и угловых (до 270°) перемещений.
Преобразователи с изменяющейся относитеньной ди•
элеI<тричес1<0й проницаемостью среды применяются для
:измерения уровнн жидкостей, ВJ1ажности веществ, тол­
щины изделий из ДИЭJJСКТрИI<ОВ и т. д.
В одинарных емкостных ИП (рис. 16.13, а) между
пластинами возникает си.па притяжения. Этот недоста­
ток в значительной степени устранен у дифференциаль­
ных ИП (рис. 16.13,6). Они имеют одну подвижную и
две неподвижные пJ1астины. При воздействии измерне­
мой величины х у этих ИП одновременно, но с разными
знаками изменяются зазоры 6 1 и б2 , а следоватеJ1Ыю, HJ·
меняются и емкоrти С1 и С2 . Дифференциальные ИП по
сравнению с одинарными обладают более высоной чуu­
ствительностью, меньшей нелинейностью фующии пре­
образования, на них мало влияют температура, давJ1е­
ние, влажность воздуха и т. д. Подвпжная пластина диф­
ференциалы-юго ИП испытывает меньшую силу притя­
жения со стороны неподвижных пJiастин, та1< как на нее
действуют силы противоположных направлений.
365
В качестве измерительных цепей емкостных ИП
обыч_1ю используют неуравновешенные мосты перемен­
ного то1<а. Цепи с емкостными ИП обычно питают током
nовышенной частоты (до десятков мегагерц) для того,
чтобы повысить мощность, поступающую в ИП, S = U 2roC,
а следоватеJ1ьно, и в измерительную диагональ моста.
Достоинства емкостных ИП - простота устройства,
высокая чувствительность и малая инерционность.
Недостатки емкостных ИП - малая выходная мощ­
ность, необходимость использования нсточниl{ОВ питания
повышенной частоты и влияние паразитных емкостей.
16.7. ТЕПЛОВЫЕ ИЗМЕРИТЕJ1ЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
Терморезисторы. Терморезнстором называется проводник или
полупровод,шк с боJ1ьшим температурным l<Оэффициентом сопро­
тивления, находящийся в теплообмене с окружающей средой, вслед­
ствие чего его сопротивJ1ение сильно зависш от температуры окру­
жающей среды.
К материалам терморезисторов предъявляются следующие тре­
бования: возможно более высокое и постоянно<' значение темпера­
турного коэфф1щиента сопротивления; химическая стойкость к воз­
деiiствию окружающей среды; достаточная тугоплавкость и проч­
ност,,; бОJIЬшое уде.пыюе электричесt(Ое сопротивление, что важно
при изготовлении малогабаритных терморезисторов.
Терморезисторы подразделяются на проводниковые и полупро­
водни1<овые.
Проводников1,1,е тер.:,юрезистор1,1,. Наиболее распространены тер­
морезисторы, выпош1енные из медной, платиновой и НИJ(елевой про­
волоки.
Медные тер.:,юрез11сторы. Электролитическая медь допускает
нагрев пе более чем до 200" С (во избежание окисления). Уравне­
ние преобразования медных терморсsисторов n диапазоне темпе­
ратур от -200 до +200° С практичесl{и линейное:
R6 = R0 ( 1
+ а0),
Где а, - температурН!,IЙ Коэффициент электr11 1;еСl(ОГО СОПрОТltВЛеНИЯ,
равный 4,25• 10-з If С; 0-температура, С; Ro -сопротиDJiение
при 0° С.
Платиновые тер,1юрезисторы. Плаrина допускает нагрев до
1200" С без опасност11 окис:�ения или распJ1авлсния. Зависимость
сопротивления 1шатины от rемпературь: нелинеi'�ная и имеет вид;
в иитерваJ1е температур от иуля до +660" С
Re = R0 (1
+ А0 + В02);
n интервале температур от О до -180° С.
А0 + B0l С (0- 100) 8],
R6 = R0 [1
+
+
°
где Ro - сопротивление при 0 С; А, В, С -постоянные.
Нелинейное1ь уравнения преобразова�rnя II высокая стоимость
nлатины являются основными иедостатl{ами платиновых термореэн,-
366
сrоров. Однако высокая воспроизводимость зависимости Re =F(0),
химичес1,ая стой,(Ость и пласти•1ность платины, позволяющая изго­
товлять очень тонкие нити (до I мкм), делают ее в ряде СJ1учасв
незаменимой. Платину нел1,зя применять в восстанавливающей
среде (углероде, водороде, парах кремния, калия, натрия и др).
По1·реш11ость от нестабильности платинового терморезистора сос­
тавляет нес1<оJJЫ<О тысячных долей процента.
Никелевые тер.морезисторы. Нн1<ель применяется до темпера­
тур 250--300" С. При более высоких те,шературах зависимость
R 0 =F(0) неоднозначная. В интервале температур от О до 100° С
уравнение преобразования практически линейно, причем а.=5-10-1
1 /° С. Основные преимущества никеля - высо1<ое удельное элекrри­
чес1юе сопротивлени� ( .в 5 раз больше, чем у меди) и большой
температурный коэффициент сопротивления.
Полупроводниковые терморезщтры (тер.мисторы). Температур­
ный 1юэффициент у полупроводюн,овых терморезисторов обычно
отрицателен и в 8-10 раз больше, чем у металлов. Кроме того,
полупроводниковые терморезисторы имеют зна•штел�,но большее
удельное электрическое сопротивление. В свя311 с этим они могут
иметь малые раз\!еры при бо.%ШОМ номинальном сопротивлении
(до 10 МОм) и, следователыrо, высокое быстродействие. Рабочи11
интервал температур у большинства полупроводниковых терморс­
зисторэв от -100 ДО +300° С.
Недостатками полупроводниковых терморезисторов являются
плохая воспроизводимость характеристик и нелинейный характер
фун1шш1 преобразования:
R0
= АеВf0к,
где R 0 - сопротивление термистора; А и В - коэффициенты; 0н абсо.�1ютная температура.
Металт1ческие терморезисторы, предназначенные для измерешы
температуры, представляют собой тою<ую голую металличес1<ую
проволоку, намотанную на каркас из изолирующего материала
(слюды или керамики). Каркас с обмоткой помещают в защитны,1
термически и хими,1ес1<и стой,шй чехол. Чехол погружают в среду,
температура которой измеряется.
Нагрев терморезисторов проходящим через них током должен
быть невеJшк: не более 0,2° С для платиновых и 0,4° С мя медных.
Номинальные сопротивления (при 0° С) платнновых стандарт­
ных 1ерморезисторов равны 1; 5; 10; 46; 50; 100 и 500 Ом, медных
стандартных терморезисторов 10; 50; 53 и 100 Ом (ГОСТ 6651-78).
Рабочий то1< металю1ческих терморезистров, кш< правило, не
должен превышать 10-15 мА, а полупроводниковых -долей ми111шамnера.
Время установлеюш температуры терморезистора определя­
ется ero инерционностью. Под ииерционпостыо тепловых ИП пони­
мается время вхождеют ИП в класс точности nри изменении вход•
ноrо сигнала скачком от О до 100%. Инерционность терморезисторов
на� оди rся в пределах от неско.!!ьюrх десят1<ов секунд до нескольких
МИНУТ.
·терморезисторы совместно с измерительны�t устройством пред•
ставляют собой термометр сопротивленип Для измерения сопрот1ш­
ленин терморезистора используются главным образом мостовые
схемы (рис. 16. 14).
367
В двухпроDоднои схеме (рис. 16.14, а), требующей два провода
для в1wючения терморезистора, возщ1каст поrрешность от измене­
ния сопротивления проводов при колебании температуры окружа­
ющей среды. Для уменьшения этой поrреншости применяется трех­
проводная лнщ1я (рис. 16.14, б). В это й схеме два соедините,11,ных
провода включены в соседние плечи моста, а третий - в днаrона,%
питания. При равновесии моста и при выполнении условий R, =R3
и Rл1 =R,2 погрешность от изменения сопротивления проводов от­
сутстьует. Если же мост неуравновешен, погрешность будет зиа­
чнтещ,но меньше, чем в случае двухпроводной схемы.
и
Рис. 16.14. Схемы В1<J1ючения терморезистора.
а - доулnроnод11ая мостовая; 6 - трехпроnодная NОстовая; о - трехпровод11а,�
мостовая 11еурdnнооешенная с .1101-ометром.
На рис. 16.14, в изображена мостовая неуравновешенная СJ<.ема
с лоrометром. Два плеча моста образоDаны манганиновыми рези­
сторами R.1 и Rs. Треп,е плечо состою из манганинового ре:-шсrора
R2 и сопротивления линии связи R.,, •1ствертое плечо из терморези­
ст ора R е и сопротивления линии связи Rл . Лри применении лоrо­
метра 11сключается [IЛИяние колебаний напряжения источ1пша ш1тани11 в определенных пределах, а при использовании трехпроводной
Jшни11 существенно снижается погрешность от ВJ111яния сопроп,в­
лення л,шии.
Для измерения сопроти[lления терморезисторов широко приме­
няются автоматические самоуравновеш,mающиеся мосты.
Термоэлектрические изr,1ерителы1ые преобразователи. Сущносrь
термоэлектрического эффекта заклJОчается в тс>м, что при соедине­
нии двух разнородных металлов нли по.ттупроводников друr с дру­
гом в месте их соедпнения возни1<ает термо-ЭДС, зависящэя от
температуры места соединения и вида металлоn (полупроводников).
Если оба конца двух разнородных проводюнюв и.1и полупроводни­
l<ОВ, называемых термоэлектродами, соединить друг с другом и
если температура то•нщ соединения одних концов 0 1 преоышаст
температуру точки соедннения других концов 02, то в цени возн�,­
кает термо-ЭДС Е0 , япляющаяся функцией температур е, и 02 :
r
Е е = Ее1 - Ее2 = F (01) - (02),
и
r,1e Е 01
Е82 - терма-ЭДС точек соединения, имею щих соответ ­
ственно температуры е, и 02 .
При нензменной температуре о.11юrо спая (02 =const)
Ее = Р (01)-С = f2 (01).
Эта эависиыость используется для измерения температуры в
368
термоэлектрических ИП, 1<оторые состоят из двух термоэлектродов,
называемых термопарой (рис. 16. 15):
Для измерения термо-ЭДС Е0 применяют электронзмерител�,ный прибор (мнлливОJ1Ьтметр, потенц11ометр). Точка соедине­
ния термоэлектродов 1 называетсн рабочим 1<онцом термопары, точ­
ки 2, 2' - свободными концами.
Чтобы термо-ЭДС в цепи термопары однозначно определялась
'Iемпературой рабочего 1<онца 8р, необходимо подд�рживать те�­
пературу с вободных концов 0с термопары одинаковои и 11е11зменнон.
Устройство, состоящее из термопары, линии связи и электро11змерите.11ьного прибора или потенциометра, называется термоэJ1ек­
трю1ссю1м термометром.
Градуировка термоэле1сrричсских преобразователей производит­
ся обычно при температуре свободных I<Онцов, равной 0° С. При
2
Рис. 16.15. Схема вклю­
чения прибора в цещ,
термопары.
6'р
Рис. 16.16. Цепь для автоматического
введения поправки на температуру
свободных концов.
пра�<тическом применении термоэ11е1сrрических термометров темпе­
ратура свободных концов термопары не раана 0° С, и поэтому в ре­
зуJtьтат измерения необходимо вводить поправку.
Широко применяются методы автоматичес1<оrо и полуавтома­
тического введения лоправ1ш на температуру свободных концов.
Термопару Вl(Лючают в нзмерите.1ьную диагональ моста, питаемого
от стабильного источюша постоянного налряжения Uo . Три плеча
моста, резисторы l(Оторых изготовлены из манганина, имеют посто­
янные сопротивления, а четвертый резистор R e изготовлен из мед­
ной проволо((и и расположен в одном месте со свободными конца­
ми 1ермопары. Следовательно, он находится при температуре 0,
равной температуре свободных концов термопары 8с. Мост урав­
новешен при температуре резистора R 0, равной 00 С, Изменение
температуры Е> вызоuст изменение выходного напряжения моста
ЛU, компенсирующее изменение напряжения, возникающее на выхо­
де термопары.
При измерениях высоl(ИХ температур, а также при измерею1ях с повышенной точностью применяются термопары из благород­
ных металлов, преимущественно платино-платинородпевых. Погреш­
ность от нестабильности хара�<теристик ллатино-платинородиевой
термопары составляет около О, 1-0,2%. Термопары из небла­
городных
мeтaJ1JIOD - хромель-алюмелевых,
хромель-копеJtевых
369
и др. - дешевы и более чувствительны, чем термопары из
благородных метанлов, но уступают им в стабилыюстн характе­
ристик и рассчитdr!Ы на измерение более низких температур
(табл. 16.1).
Та б л и ц а 16.1. Основные характеристики термоэлектрических
преобразователей
Bepx11111t предс.�
температуры, 0С
Термопара (материал)
Платина - платинородий (90 % Pt+
+10 % Rh)
ХромеJ1ь (90 % Ni+1О % Сr)-алюмель (95 % Ni+5 % AI)
Хроме.% - копель (56 % Cu+44 %
Ni)
11р11 д1111тельно м
нагреве
лр11 кратковремен-
1JON на-
Тер моЭДС npu
НЮ0С, мВ
rpene
1300
1750
0,64
900
1300
4,10
600
800
6,95
Термоэлектроды термопары соединяют друг с другом путем
пайюi IIJIИ сварrш и помещают в защитную ар�1атуру, предохраня­
ющу10 термопару от действия химичес1ш агрессивных газов. В l(а­
честве защитной арматуры применяют трубы из специальных ста­
лей, а ДJIЯ термопар из благородных металлов - кварцевые и кера­
ми1Jесю1е трубы.
Для из�1ерения терма-ЭДС термопар используются милливолr,т­
метры и потенциометры с низ1ш.V1 предсло,1 измерещ:я (до 100 мВ)
как с ручны1\1, та•< и автоматичесюш уравноuешиванием. В послед­
нем случае сопротивление Jш1шн г.е вызывает погрешности измерения,
та�< как ток, потребляемый потенциометром при измерею1и, прак­
тически раuен нулю. Авто��атический потенциометр может произво­
дить запись показаний, а 1·акже осуществлнть сигнализацию или
регулироuание.
В тех случаях, когда терма-ЭДС измеряется милливольтмет•
ром, возникает погрешность, обуслооленнан колебаниями сопротив­
лений термоэлектршюв и липни связи при изменении температуры.
Так как сопротивление милливо.%тметра обычно в 40-50 раз боJlЬ­
ше сопротивленнн линии и 13 со тни раз боJ1ЬШе сопротивления тер­
моэлеl(тродов, то погрешность вследствие изменения температуры
линии и термоэле1<тродов невелика (меньше 1% ). Инерционность
термопар в обычной арматуре равна нес1юльким минутам.
16.8. ЭЛЕКТРОХИМИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ
ПРЕОБРАЗОВАТЕЛИ
Электрохимичесl(Ие ИП служат для определения свойств или
состава растuоров. Выходным параметром ИП является эле�сrри­
ческая ве.11ичина, нанример ЭДС, падение напряжения от проходя­
щего то1<а, э.11ектрическое сопротuвление и т. д.
370
В качестве примера рассмотрим принцип действия электрол11тичес1шх ИП. Элепро1111п1ческие ИП служат для измерею�я концен­
тращш эле1пролитов. Их работа основана на зависимости уде.,ь­
ного сопротивления электролита от его концентрации.
Преобразователь, применяемый в лабораторных условиях, пред­
ставляет собой сосуд с двумя электродами (эле1(тролип1ческая
ячей!{а), сопротивление между которыми
зависит от концентрации растnора (рис.
16.17).
Для промышленных непрерывных из­
мерений ИП выподняются проточными,
причем часто применяются конструкции, в
J<оторых вместо второго эле1<трода исполь­
зуются стенки сосуда. Сосуд в этом слу­
чае должен быть металлическим. J\'\.атернал
со<"удов и элеиродов зависит от природы
эде1<тролита.
При прохождении постоянного тока
через электролит происходит электролиз
раствора, •�то пр,шодит к искажению ре­
зультатов измерения. Поэтому электроли­
16.17. Лаборатор­
тический ИП обыч�ю вклю•�ают в схему не­ Рис.
ный
эле�,трол,пичес­
,
питаемого
от кий преобразователь.
уравновешенного моста
стабильного источника переменного напря­
жения частотой 700-1000 Гц. В измерительную диагональ мосrа
включается выпрямительный миллиамперметр, шкала которого про­
градуирована в значениях концентрации раствора электро.,ита.
Для устранения влняния температуры на сопротивление элек­
тролита прнменяют схемы температурной компенсации нли стаб1ти­
зируют температуру раствора с помощью холодилышка или тер­
мостата.
16.9. ЛАБОРАТОРНАЯ РАБОТА .№ 15.
ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ ПРИ ПОМОЩИ
ТЕРМОРЕЗИСТОРОВ
Для измерения сопротивления медного терморезистора в данной
работе применен од11нарный неуравновешенный мост ABCD, в одно
из плеч которого в1<лю11ен терморезистор R 1 , а в остальные три
nле,1а - стабильные резисторы (рис. 16.18). Мост питается от ис­
то•11шJ<а наnряженин постоянного тоr(а. Ток / в мнкроамnерметре,
включенном в измерительную диагональ моста АС, яв.qяется фу1ш­
цией измеряемой температуры 0. Сопротивление резисторов R=
= 100 Ом, а сопротивление регулируемого резистора R2 выбирает­
ся так, чтобы на•1алу заданного диапазона измеряемой температу­
ры 0 соответствовало равновесие моста.
Для уменьшения влияния изменений сопротивлений проводов
Rп, соединяющих терморезистор R1 с остальнсй •,астью схемы, при·
ыенена трехпроводная линня связи.
Равновесие моста имеет место при услошш
371
где N10 - значение R,, соответствующее на•1алыюй точке диалазона
измеряемой температуры 00, налримср 00 =0 ° С.
Равновесне моста не нарушается лри изменени11 Rn.
1. Для вьmолнения n. 3 задания надо собрать схему на
рис. 1 6 .18, в которой стандартный медным тсрморез11стор с номи­
нальным сопротивлением 50 Ом npt1
0° С имитируется магазином резисто­
JЮR R,.
Сначала следует установить зна­
чение R1 =50 Ом, соответствующее
темлературе терморезистора 0о=0° С,
и ура11новесить мост лри помощи ре­
зистора R2 лри напряжении литания
моста Uu =0,5 В. Затем, лользуя(;Ь
,,._
Рис. 16.18. Лринцилиальная схема
одинарного моста с трехлроводной
линией связи (R,=2,5 Ом; R=
=l00 Ом).
номина;�ыюй стати•tеской характерист11коi1 лреобразования терморе­
зистора, приведенной в табл. 1 6. 2 установить RI соот:зетству ющ�е
температуре терморезистора 0= 100° С, и, регулируя налряженае
литания моста U11 , ллучить ток 1 в измерительной диагонали моста ,
равный 200 мкА.
Та б л и ц а 16 .2. НоJ1шнальная статическая характерист11ка
nреобразовани11 медных терморезисторов типа ТСМ с 11оминальиым
сопротиuJ1еш1ем 50 Ом пр11 О С
0
е. с
0
R, Ом
о
10
20
50,000
52,140
54 ,281
30
50
40
56,4 22 158, 562 1 60,702
Продолжение
0, С
0
R, Ом
60
70
80
90
100
62,842
64,981
6 7,121
69,261
71,400
Рассчиrать no лриближеииой формуле ток / 1 , лротекающий по ре­
зистору R,:
Убедиться, что ток / 1 не лревышает долустимого зна•1ен11я, рао1юго 10 мА, для используемого медного терморезистора.
Сохраняя налряженне U n неизменным и задавая различные зна­
чения R1 в соответствии с номияальной статической характеристи372
кой преобразования, можно получить градуировочную кривую / =
=f(0).
2. Для выполнения п. 4 необходимо в цепи рис. 16.18 вместо ре­
зистора R, включить медный терморезистор и подать напряжение U.
Напряжение U0 должно соответствовать значению, полученному при
градуировке термометра.
Температуру воздуха определить по показанияы микроампермет­
ра по градуировочной кривой /=F(0).
3. Для выполнения n. 5 надо медный терморезистор, включенный
в мостовую цеп�,, поместить в водяную баню, установленную на
электроплитке, и нагреть воду до кипения. Лосле этого следует вы­
нуть медный терморезистор нз водяной бани и записывать показа­
ния микроамперметра через каждые 30 с до тех пор, пока изменение
п01,азаuий микроамперметра за указанный интервал оремени не ста­
нет меньше 1 мкА.
Ло градуировочной кривой определить зависимость температуры
терморезисторов е, от времени t при его остывании,
Задшше
1. Ознакомиться с приборами, необходимыми для проведения
работы, записать пределы измерения, системы, классы точности и за­
водсю1е номера.
2. Зарисовать схему электрического термометра, представляюше­
го собой неуравновешенный мост со стандартным терморезистором
типа тем.
3. Экспериментально определить градуировочную характеристику
/=F(0) при 0=0+ 100 °С для электрического термометра. Построить
кривую /=f(0).
4. С помощью электрического термометра измерить температуру
окружающего воздуха.
5. Определить зависимость температуры терморезистора 0. от
времени при его остывании на воздухе. Построить зависимость 0т =
=F(t).
б. По результатам п. 5 определить время остывания терморези­
стора от 0т=100 °С до 0, = 35 °С.
7. Составить отчет по требуемой форме.
ГЛАВА СЕМН АДЦАТАЯ:
ИЗМЕРИТЕЛЬНО-ИНФОРМАЦИОННЫЕ
СИСТЕМЫ
17.1. ОБЩИЕ СВЕДЕНИЯ
Создание и Эl{сnлуатация современных машин и со�
оружений, контроль параметров и технологичес1шх про­
цессов требуют организации измерений и контр оля боль­
шого числа различных физичес1шх величин. НапримЕ'р,
373
крупнейший в мире турбогенератор мощностью 1200 МВт,
созданный на J1енинградском объединении «Электроси­
ла» для Костромской ГРЭС, при испытаниях на стенде
исследовался с помощью 1500 первичных ИП, при этом
измерялись: вибрация корпуса, подшипников, основных
11астей обмотI<и; температура ЗI(тивной части стали, по
которой замьшается магнитный поток; температура nро­
водниI<ов, масла, водорода, охлаждающей воды; расход
газа, масла и многие другие эле1(трические и неэле1<три­
ческие величины. Другой пример: контроль за состояни­
ем гидротехничесI<их сооружений и работой агрегатов
электротехнических систем и аппаратов Саяно-Шушен­
с1юй ГЭС осуществляется посредством примерно 3000
первичных ИП.
Понятно, что решение таI<их задач традиционными
способами - подю1ючением I( I<аждому первичному ИП
индивидуаJiьноrо ИП - просто невозможно уже хотя бы
потому, что из-за большого 1юличества приборов опера­
тор не в состоянии следить за их показаниями. Подобно­
го рода трудности возниI<ают и при небольшом числе
первичных ИП в случае контроля быстропроте1(ающих
процессов. Между тем в задачах такого рода измери­
тельная информация, поступающая от первичных ИП,
должна быть собрана, обработана и в удобной форме
представлена оператору. Для этого применяется специ­
альный вид средства измерений - измерителыто-инфор­
мационные системы (ИИС). Измерительно-информаци­
онная система представляет собой фу1шционаJ1ьно объ­
единенную совокупность средств измерения несrюлышх
физических величин и вспомогательных устройств и пред­
назначается для получения измерительной информации
об иссJ1едуемом объекте в условиях его фунrщионирова�
ни.я или хранения.
В зависимости от назначения ИИС подразделяются
на:
системы сбора измерительной инфор�1ации от иссле­
дуемого объеI<та; та!{ие системы часто называют просто
измерительными системами;
системы автоматичесrюго !{Онтроля, предназначенные
для Еонтроля за работой разного рода машин, агрегатов
или технологических процессов;
спстемы техпичес!{ОЙ диагностиrш, предназначенные
для выявления технической неисправности различных
изделий;
374
телеизмерительные системы, пре,:щазначепные для
сбора измерительной информации с удаленных на боль­
шие расстояния объе1<тов.
Важнейшей разновидностью ИИС являются из,-1ери­
тельно-вычислительные 1юмпле1,сы (ИБК), пп:1учившне
применение в посдедние годы. Та1< же ка1, и ИИС, ИВК
представляют собой автоматизированные средства из­
мерений и обработки измерительной информации, пред­
назначенные для применения на СJIОжных объектах. Их
отличительной чертой является наличие в системе сво­
бодно программируемой ЭВМ, которая используется не
толь.ко дJIЯ обработки результатов измсрени�. но и для
управления самим процессом измерения, а также для
управления воздействием (ecJiи это необходимо) на
объеl{т исследования.
Первоначально ИИС разрабатывадись индивидуаль­
но для каждой 1юнrфетной измерительной задачи, при­
чем всюшй раз заново разрабатывались не только
структура системы, но и все ее фующиональные узлы.
Та1<0й подход 01,азался нерентабельньщ - 1.;рок разра­
ботrш затягивался, стоимость ИИС была высокой. Поэ­
тому в настоящее время взят курс на аrреrатньrй прин­
цип построения, сог.1асно 1юторому ИИС строится из
нонструктивно заrюнченных и выпускаемых серийно
приборостроитедьной промышленностью фующионадь­
ных уздов, объединенных общим адгоритмом фующио­
нирования.
Агрегатный принцип построения ИИС обладает ря­
дом достоинств: рез1ю соl{ращается ерш< разработrш си­
стемы и ввод ее в действие; система просто перестраива­
ется в процессе эксплуатации, если требования 1, ней
изменяются; отдельные функциональные узлы можно
дег1ю заменить на более совершенные образцы и т. д.
Унифицированные функциональные узлы (блоки и
модули), предназначенные для построения ИИС, образу­
ют агрегатные комПJ1ексы Государственной с1�стемы про­
мышленных приборов и средств автоматпзации (ГСП).
17 2. ГОСУДАРСТВЕННАЯ СИСfЕМА ПРИБОРОВ
И АГРЕГАТНЫЕ l(ОМПЛЕl(СЫ
Работы по созданию ГСП как основиоii элеr-1снтноi% базы для
построения ИИС былн начаты в СССР в 1960 r. В 1961 году в эту
работу включаются стрзны - члены Совета Экономическоfr Взаимо­
помощи (СЭВ); они принимают рещение по созданию международ-
375
ной универса,%ной системы автоматического контроля, регулирования
11 управления - УРС. В разработке этой системы принимают участие
СССР, ГДР, ЧССР, ПНР, НРБ, СРР. В Советско�{ Союзе эти работы
ведутся no шшш1 ГСП.
Государственная система приборов предусматривает создание
научно обоснованных рядов приборов и устройств с у11пфнцирова11ПЫJ11И хара�перистrшами и конструктивным исnолненпем.
Устройства ГСП, предназначенные дJ!Я решения определешшх.
11змерителы1ы)t задач, объединяются в агрегатные комплексы. В на­
стоящее время промышленность СССР выпускает около 20 агрегат­
ных 1<омплексов, среди иих агрегатные комплексы средств элеитроиз­
мерите.11ьной техники (АСЭТ), вы•шс.пительной техншш (АСВТ), конт­
роля и регул�1рования (АСКР), хронометричес1юii техники (АСХТ),
испытаний на про•шость (АСИП) 11 др. Изделия, входящие в агре­
гатный комплекс, должны легко сопрягаться друг с другом без не­
обходимости разработки каких-либо дополнительных устройств, не
01шзывать заметного взаимного влияю1я, иметь одинаковые условия
эксплуатации. Для этого они должны обладать так называемой сов­
мсстимостыо. Различают пять видов совместимости издеJшii агрегат­
ных ко,rпдексоп: энергетическую, метрологическую, конструктивную,
эксплуатационную и информационную. Учитывая важность этого по­
ложения, кратко рассмотрим каждый вид совместимости.
Э1..ергетическая савместимость предполагает выбор одного рода
энергии носителя сигналов в измерител�,ных устроi'tствах. Для этой
цели в ГСП предусмотрено три вида энергии: элек1ричес1<ая (наибо­
лее распространенная), лневматиqеская и гидравлическая. Последние
обычно nриме11яются в особых условиях эксплуатации ИИС, напри·
мер во взрывоопасных помещениях 11 т. д.
Метрологи 11еская сов.11ест11м.ость обеспечивает сопоставимость
метролопiческих характеристик агрегатных средств, их сохранность
во времени и под действием влияющих величии, а также возмож­
ность расqетноrо определения метрологических характеристик всего
измеритеJ1ьного тра�{та ИИС no метролоrическ111.1 хараткернстикм1
отдельных функциональных узлов, образующих нэмерите.1ьный тракт.
При этом метрологические характер11сп11ш агрегатных средств нор­
мируются по един(jму методу, а параметры входных и выход11ых це­
леi\ согласуются, <Jтобы сопряжение агрегатных средств не сопровож­
далось заметными дополнительными погрешностями.
Экс11луатационная сов,11естш,юсть достигается согласованностью
характеристик, определяющих действие внешних фа1,торов па агре­
гатные средства в рабочих условиях, а также характеристик надеж•
ности и стабильности функционирования. Для этого все средства
делятся па группы по использованию в зависимости от условий ок­
ружающей средь� климатических II механических воздействий и 1. д.
Эксплуатационная совместимость создает возможность 1юмnоновю1
системы с заданными значениями пара)'lетров t1адежности и рабочи­
ми условиям1i эксплуатации.
Конструктивная совмести.масть обеспечивает corласованность
конструктивных параметров, механическое сопряжение средств, со­
rласоваиность эстет11че.ских требований. Достигается это путем нор­
мирования еднных форм элементов конструкни11, установочных и
присоединитеJ1ьных размеров, nр11менен11я единой пrоrрессивной тех­
но.r.огии изготовления и сборки конструкций, соблюдения единого
ст11,1я оформления .
376
Информац�юнная сов4�естrt.мость средств обеспечивает согласо­
ванность входных и выходных сигналов по виду, диапазону измене­
ния, nоряю<у обмена сигналами. Информационная совместимость оп­
ределяется унификацией измерительных сигналов и примене нием
стандартных иН1ерфеikов. �'нифш<ация 11змер11тельных сигналов оз­
начает, что их параметры нс могут выбираться про:1зволыю, а долж­
ны от1,е•1ать требованиям стандарта на эти сигналы. Так, для ИП с
токовым выходо1'1 стандарт ГСП нормирует диапазоны изменения
выходного тОl<а 0-5 или 0-10 мА, а для ИП с выходным напряже­
нием постоянного то1<а устанавливается диапазон нзменения 0-10 В
и т. д. Под интерфейсом понимаются электрические, логические и
констру«тИDiiЫе условия, которые определяют требования к соеди­
няемым функциональным узлам и связям между ннми. Э.:тектри•1еск11е
условия определяют требования 1< параметр,ш сигналов взаимодей­
ствия и способу их передачи, логические - номенклатуру сигналов,
пространственные и временные - соотношения между ними, конст­
руктнвные - конструктивные требования к эле11ентам интерфейса:
вид разъема, место его расположения, порядок распайки контактов
и т. д.
Нанбо.1ее перспективными для ИИС и ИВК в настоящее время
являются интерфейсы КАМАК (CAJ\'lAC - Computer Application for
Measuгerпeпt And Cont1·ol) 11 приборный иптерфейс, рекомендован­
ный Международной элеl(тротехнической номиссней (МЭК) в каче­
стве международного стандарта.
Интерфейс KANlAK применяется в ИИС и ИВК, предназначен­
ных для исследования сложных объентов с быстропротекающими
процессами. l\1аrистраль в таких системах содержит 86 параллельных
проводников. Приборный интерфейс отлн•1ается большей простото11,
его магистраль содержит только 16 проводнююв.
Изделия агрегатных комплексов, облада1<1щ11е указанными вида­
ми совмесn1мост11, позволяют строить ИИС методо:1-1 прое1(тиой 1юч­
nоновки. По быстроте построение ИИС данным метоцо,1 можно срав­
ннть со строите,1ьством здания из крупных панелеf1, ко1орое JЗозво­
дится гораздо быстрее, чем здание из ю1рnичей.
17.3. ОСНОВНЫЕ СТРУКТУРЫ ИИС
Структуры ИИС можно 1<лассифицировать по раз­
личным признакам. Наиболее часто в качестве nризнаиа
классиф1шации выбирают способ Qбмена сигналами вза­
имодействия, т. с. сигналами, которые обеспечивают со­
гласованное преобразование информации всеми функци­
ональными узлами системы.
Структура ИИС зависит таюке от принятого в систе­
ме способа управления - децентрализованного или цен­
трализованного. В первом случае состав н режим работы
функциональных узлов постоянны - возможчости такой
системы ограничены, но она обладает простотой, 1юм­
пю<тностыо и невысокой стоимостью. Во втором случае
система содержит центральное устройство управления 1юнтроллер, который задает режим работы функцио24-970
371
на1ьных узлов, изменяет количество и состав взаимо­
действующих функциональных узлов, а также связи
между ними, т. е. гибко из..,1еняет фующиональные воз­
можности системы.
Струrпуры децентрализованных систем не отличают­
ся многообразие:11. На рис. 17.1 показана одна из них с
цепочеч�-rы,-1 соединенr:ем фушщиональных узлов ФУ 1 ,...
... , ФУn. Все сигналы передаются по индш,шдуальным
для r<аждого функционального узла шинам, а сами функ-
конrпроллер
Рис 17.1. Цепочечнан структу­
ра системы
Рис 17 2. Радиальная структу­
ра си стемы.
uиональные уз;1ы выполняют заранее заданную опер а­
цию над информационным сигналом. Примером системы
с цепочечной структурой могут служить системы цент­
рализованного rюнтроля параметров технологических
процессов. Таrше системы обычно содержат: ряд первич­
ных ИП; цикличесrшй коммутатор, посредством тюторого
периодически каждый первичный ИП подключается к
ИИС; ряд последовательно включенных групповых нор­
мирующих ИП, предназначенных для фильтрации, мас­
штабного преобразования и линеаризащш выходных
сиrна.rюв первичных ИП; аналого-цифровой ИП; специ­
ализированное устройство обработки информации и ре­
гистратор.
Структуры систеч с централизованным управленпем
разнообразнее, к ним относятся стру1<туры радиальная,
магистральная, радиально-цепоче•шая и радиально-ма­
гистральная.
Радиальная струr<тура системы nor<Rзaнa на рис. 17.2.
Обмен сип1а;1ами взаимодействия между фунrщионаJIЬ­
ными узлами ФУ происходит через нонтроллер. Это поз­
воляет программировать ФУ путем подачи програм­
мных сигналов от контроллера, из�1енять порядок обра­
боТI<и информации и т. д. В данной структуре r<аждый
функциональный узел подr<лючается I< контроллеру пос­
редством индивидуальных шин. Однако наращивать
378
число узлов в таких струюурах трудно пз-за усложнения
контроллера.
МагистраJ1ьная струr<тура показана па рис. 17.3. Осо­
бенность данной струr<туры заллючается в наличии об­
щей для всех фующионалы-1ых узлов шины (однопро­
водной или многопроводиоП), по которой передаются
сигналы
взаимодействия.
Эта шина называется маги­
стралыо. Адресный сигнал
показывает, r< какому фую<­
ционалыюму узлу относит­
ся информация, находящан­
ся на других проводах маРис. 17.3. Маrистральнаи струк-­
тура системы.
контроллер
гистрали. Магистральная структура лешо позволяет
наращивать число фунrщиональных узлов в системе. Эта
структура применяется для решения задач авто11атиза­
ции различных эr<спериментальных исследований.
Радиально-цепочечная и радиалы-ю-магистральпая
структуры представляют собой 1Сомбинации рассмотрен­
ных выше стру1<Тур.
Обобщенная струr<тура ИИС nо1<азана на рис. 17.4.
Информация от объекта исследования поступает на оп-
Ооьект
исслеооВа- п�
ния
ИИС
1 --------------,
1
1
'
1
1
1
1
1
'
i
L - - - ___________ J
Рис. 17.4. Обобщенная структура ИИС.
ределенпое множество первичных ИП (ПИП), преобра­
зуется в эJrеr<трическую форму и передается на средства
измерения и преобразования информации СИП И, в ко­
торых выходные сигналы ЛИП наиболее часто nодвер�
24*
379
гаются следующим операциям: фильтрации, масштаби­
рованию, J1инеаризации, аналого-цифровому преобразо­
ванию. Затем сигналы в цифровой форме могут переда­
ваться на цифровые средства обработ1ш и хранения
информации СОХИ для обработI<и по определенным про­
граммам или на�<апJ1ивюшя, а таI<же на средства отоб­
ражения информации СОИ для индиI<ации или регист­
рации. Устройство формирования управляющих воздей­
ствий УФУВ посредством
заданного
множества
исполнительных устройств И У воздействует на объе1п
иссJ1едования для регулирования, тестирования и т. n.
В 1<ачестве СОХИ в ИИС применяются различные
устройства от специализированных вычислительных уст­
ройств и микропроцессоров до универсальных ЭВМ. В
последнем случае на ЭВМ возлагаются и функции уст­
ройства управления УУ.
В состав ИИС первичные ИП и исполнительные уст­
ройства не входят, выбор их типов и размещение на
объе1<те производится специалистами - разработчиками
объекта исследования. Современные сложные ИИС часто
рассматривают I<aI< I<омnозицию трех ко:.шлеI<сов - ин­
формационного (включающего средства пзмерения и
преобразования информации и средства отображения
информации), вычислитеJ1ьного (в1<лючающего средства
обработI<и и хранения информации II устройства управ­
ления) и управляющего (включающего устроi'rство фор­
мирования управляющего воздействия).
В последние годы сформировалась ц выде:шлась в
самостоятельное направлеш1е ветвь ИИС- измеритель­
но-вычислительные комплексы (ИВК). Измерптсльно­
вычислитеJ1ьные комплексы содержат две части: уст­
ройство связи с объектом УСО и вычислительную часть
(рис. 17.5). Последняя в ИВК образуется свободно про­
граммируемой ЭВМ с развитым программно-математи­
ческим обеспечением ПМО. Электронно-вычислительная
машина управляет в ИВК всеми процессами сбора и
обрабопш информации. Стру1<тура ИВК может иметь
один или два уровня. Одноуровневая стру1<тура содер­
жит одну магистраль - магистра.rrь ЭВМ, к которой под­
ключены все устройства ИВК. Двухуровневая стру1<тура
(рис. 17.5) содержит две магистрали - приборов и ЭВМ.
Сигналы взаимодействия между магистралями переда­
ю1ся через системный 1юнтроллер - транслятор ТР.
Управление ИВК от ЭВМ осуществляют специальные
380
nрограммы-драйверы. В результате из�енения струI<ту­
ры и методов обработки измерительной информации
nрограммным путем можно легI<о приспосабливать ИВК
к особенностям объекта иссJJедования.
В качестве ЭВМ и ИВК широко используются так
называемые мини-ЭВМ. До последнего вре�1ени в состаРис. 17.5. Обобщенаая структу­
ра ИВК.
Рис. 17.6. Структурная схема
11ростой ИИС.
ве агреrатпого E0MПJJeI<Ca АСВТ выпускались мини-ЭВМ
типов М-6000, М-7000, а также М-400. С 1977 г. странами
СЭВ вместо указанных ЭВМ стаJIИ выпускаться боJ1ее
совершенные машины серии СМ. Это мини-ЭВМ треть­
его поколения, предназначенные для применеш�я в авто­
матизированных системах управJJения технологическими
процессами в системах автоматизации экс11ерименталь­
ных иссJiедований. Серия СМ в настоящее время состо­
ит из пяти моделей: СМ-1, СМ-2, СМ-3, СМ-4, СМ-5. По
своей структуре эти машины близки 1( М-6000, М-7000 и
М-400, но значительно превосходят их по техничес1шм и
эксп.пуатационным хараr<теристrшам.
Значительное распространение поJJучиJJи также ИИС
для сбора и относитеJ1ьно простой обраб<;н!(И информа­
ции, поступающей от небоJ1ьшоrо числа обычно однород­
ных первичных ИП. Структурная cxerv1a таI<ой системы
показана на рис. 17.6. Измеряемые сигналы подаются на
входы 1, 2, ... , n коммутатора, с выхода которого они по­
ступают на анаJJоrо-цифровой преобразоватеJiь АЦП и
регистратор. Применение средств вычислительной техни­
ки здесь минимаJiьное. Управление работой т2ких уст­
ройств обы•шо осуществляется специальным генерато­
ром импульсов определенной последова-rеJ1ьноети (тай­
мером), который входит в состав управляющего устрой­
ства .У.У.
381
Ко.мплекс АСВТ-М (М-60) является комплексом аг­
регатных средств вычислителыюй техниl{и. Он предназ1-1ачен дJJЯ компоновки прое[{тными методам.и ИИС и
ИВК, работающих в автоматизированных системах уп­
равления технологичесI<ими процессами и предприятия­
ми. Ко.мr1J1екс разработан в основном для применения в
автоматизированных системах управления мощными
энергобло[{ами тепловых и атомных э.ттектр останций,
1<оторые характеризуются боJ1ьшим ко,1ичеством выхо;I.­
ных сигналов и разнообразием средств представления
информации. Однако возможная обJ1асть применения
:комплеI<са более широкая; он может применяться в хи­
мичесrюй, металлургичес1<0й, горнорудной и других от­
раслях народного хозяйства.
Компле1<сы АСВТ-М выполнены на эдс11еитах мик­
роэJ1ектрони1<11 и обеспечивают сбор и обработку инфор­
мации, поступающей от 4096 аналоговых и кодовых
8-разрядных первичных ИП в любых сочетаниях, посто­
янный и выборочный контроль входных параметров, ре­
гистрацию боJ1ьшой части входных параметров, сигнали­
зацию об отклонении их от нормы, а также выдачу уп­
рав.ттяющих воздействий по 128 аиа,1оговым и 1024
дискретным каналам. Кроме того, 1<0мп.rrекс позволяет
производить вычис11ение технюю-экономических ПОl{аза­
телей и другие матем.атические и логические операции.
Д,1я объе1<тов с малым количеством контролируемых
сигналов (до 60) основная аппаратура комп.�:е1<са будет
содержать избыточность. Поэтому для таких объектов
разработаны специальные модули, имеющие непосред­
ственную связь с процессором, отличающю1ся низ1юй
стоимостью.
Измерительно-вычислительный 1юмпJ1екс ACBT-/Vl
состоит из трех основных частей: информа1щошюго, вы­
числительного и управлнющего комплеl{сов.
В состав информационного r<0мпле1<са входят: устрой­
ства сбора и распредеJJения информации от объекта,
устройства визуального представJiення информации,
включая эJ1еrаронно-J1учевые индикаторы, и устройства
контро.rrя параметров путем сравнения с уставками, а
'l'акже устройства регистрации и сигнализацпи.
ВычислитеJ1ьный комплекс орга�шзован на базе ми­
ни-ЭВМ типа М-6000 и предназначен д.rrя nыполнения
необходимых расчетов и логических операций в реаль­
ном масштабе времени в процессе обработ1ш информа382
ции, поступающей от информационного l{Омплеr{са, а
также вырабОТl{И сигналов управления и подачи их на
устройства управляющего комплеl{са. В зависимости от
сложности вычислительных и логических задач, решае­
мых ИВК, состав вычислительного l{ОМПЛеl{са может на­
ращиваться от минимаJ1ьного компJ1еr{та, состоящего из
одной ЭВМ, до многопроцессорной системы.
Управляющий комплекс содержит устройства выра­
ботки позиционных и анаJюговых сигналов управления
по командам, поступающим от вычислительного rюмп­
лекса, а также вручную с местного пульта управления.
Аналоговый сигнал управления вырабатывается преоб­
разователями угла поворота в .электрический сигнал на
базе шаговых двигателей, при этом достигается погреш­
ность отработки сигнала не боJ1ее 1,5%, а время отра­
ботки не более 2 с. Предусмотрены таюке быстродейст­
вующие устройства выработки аналоговых сигналов
управления на базе электронных преобразователей
!{ОД - аналог ( цифро-аналоговые преобразователи). Вы­
ходной сигнал таrшх преобразователей представляет на­
пряжение постоянного Tol{a с диапазонами изменения
0-5 В, погрешность преобразования не превышает 0,1 %
при времени отработки пе более 4 мкс.
Рассмотрим более детально организацию информа­
ционного комnлеr{са. Информационный комплеr{с выпол­
няет следующие функции:
1) контроль параметров по вызову о ператора:
а) посредством аналоговых показывающих приборов
типа ППМ или АСК;
б) посредством цифровых приборов, графических ре­
гистраторов, электронно-лучевых трубок и т. д.;
2) регистрацию параметров по вызову оператора по­
средством графических регистрирующих и алфавитно­
цифропечатающих приборов;
3) автоматический контроль параметров путем срав­
нения их значений с устав[{ами; если контролируемый
параметр выйдет из допустимых границ, то подается
световая и зву[{овая сигнализация;
4) контроль и регистрацию параметров и расчетных
данных, переработанных вычислительным комnле[{сом;
5) передачу в вычислительный rюмплекс данных об
от[{лонении контролируемых параметров от ,юрмы с ука­
занием адреса параметра и знака ОТl{лонення, а та[{же
полу чение из вычислительн ого комплекса сигналов от383
:клонения от заданных зна•1ений параметров, [{Онтроли­
руемых непосредственно в вычислительном l{Омплексе,
с указанием адреса и знака отклонения.
Струl{турная схема информационного комп,1екса
АСВТ-М показана на рис. 17.7.
Сбор информации от аналоговых первичных ИП про­
изводитсн устройствами [{Оммутации, нормаJJизации и
преобразования УКНП. Первичные ИЛ, имеющие вы­
ходной сигнал в виде напряжения постоянного то1<а,
подюrючаются r{ УКНП непосредственно - это прежде
всего термоэлектричесюrе и реостатные преобразователи
Р1-:с. 17.7. Упрощенная структурная схема информационного комп­
лекса АСВТ-М.
и др. Первичные ИП с выходным сигналом переменного
тока подключаются через индивидуальные ИП с уннфи­
цированным выходным сигналом постоянного тока.
Информация от дисr{ретных первичных ИП поступа­
ет на устройство 1<оммутации дискретных преобразова­
телей УКДП. Дис[{ретными преобразователями могут
быть электромеханические контакты или любой преобра­
зователь с цифровым выходом.
ПроизводитеJ1ьность сбора информации - 200 анаJю­
rовых ИП в секунду.
Устройства сбора информации управляются устрой­
ством управления коммутацией и преобразованием
УУКП. Последнее содержит устройство линеаризации и
масштабирования УЛМ, позволяющее линеаризовать не­
линейные характеристиrш первичных ИП. Устройство уп­
р авления коммутацией и преобразование.,,� принимает
384
-rребования на информацию с уrшзанием адреса первич­
ного ИП от оператора, вычислительного компJJекса ВК
ИJIИ управJiяющего устройства, организует очередь тре­
бований по приоритетному принципу с тремя уровнями
приоритета, выбирает по адресу соответствующий пер­
вичный ИП, получает от него информацию и выдает ее
потребителю.
ПредставJiение информации осуществJJяется тремя
устройствами: устройством цифрового rюнтроJ1я и графи­
ческой регистрации УЦКГР, регистрирующим устройст­
вом с адресозадающим принципом печати РУАП и сис­
темой графического взаимодействия СГВ.
Устройство цифрового rюнтро11я и графической реги­
страции содержит цифро-аналоговые преобразователи
для вывода uифровых сигналов на аналоговые графиче­
ские регистраторы, а также блок}! управ.1Iения uифровы­
ми индиr{аторами. Последние имеют девять знаков, из
них четыре индицируют адрес вызванного параметра,
четыре-значение контролируемого параметра и один размерность вызванного параметра.
Назначение РУАП состоит в регистрации данных о
состоянии параметров, объектов и расчетных данных из
вычислительного комплекса. Регистрация данных проис­
ходит при отклонении параметров от заданных норм.
Возможность обмена информацией в буквенно-цифро­
вом и графическом виде между оперативным персоналом
и вычислительным rюмплеr,сом на экране эJ1ектронно­
лучевой трубки ЭЛТ обеспечивается системой графиче­
ского взаимодействия СГВ. На экране ЭЛТ оператору
представляется в ц11фровой форме также текущая ин­
формация о состоннии объекта.
Координа11ия действий УЦКГР, РУАП и СГВ произ­
водится устройством вызывного контролн УВК.
Контроль состояния параметров производится уст­
ройством выработки и памяти отклонения УВПО путем
сравнения текущих параметров с уставками. Если значе­
ние контроJrируемого параметра находится в поле нор­
маJ1ьного состояния, то вырабатывается сигнал «норма».
При отклонении значения параметра за границы поля
нормального состояния вырабатывается сигнаJJ «больше»
иJIИ «меньше», в1{,1ючаются мигающая световая и звуко­
вая сигнализации, а адрес О'П{Jю11ившегося параметра с
указанием знака отклонения передается в вычислите.111,­
ный комплекс.
385
Пульт информационного l{Омплеl{са ПИК пред1r- азна­
чен для выполнении служебных планово-профилактиче­
ских работ в устройствах комплеl{са, выполняемых об"
служивающим персоналом.
Структура информационного комш1екса содержит
оперативный контур с аналоговыми ПОl{азывающими
приборами АПП, на 1<оторые подаются сигналы непо­
средстве11но с выходов устройств коммутации, нормали­
зации и преобразования УКНП. В случае выхода uз
строя остального оборудования, например УУКП, УЛМ,
УЦКГР и др., управление контролируемым технологиче­
ским процессом производится через оперативный кон"
тур - это повышает «живучесть» информационного комп­
лекса. Однаrю из соображений простоты конструкции
оперативного контура на него выноснтсн не все, а только
важнейшие из контроJJируемых параметров, что ухудша­
ет I<ачество контроля технологического процесса, но опе­
ративным контуром пользуются редко.
Конструrаивнан l{Омпоновка устройств производится
в специальных шI<афах или тумбах: УКНП раз..rещается
в ШI<афах с размерами 1600Х800Х650 мм; прочие уст­
ройства (УКдд, УУКП, УЛМ, УВК, УЦКГР, УВПО) в шкафах с размерами l600X600X650 мм или тумбах с
размерами 740Х600Х650 мм.
Размещается это оборудование в специальных поме­
щенинх, среди которых следует отметить: диспетчерский
зазr - рабочее место оперативного персонаJ1а, ведущего
управление объектом, в этом зале установз1ена мнемо­
схема производства, устройство регистрации и индика­
ции r(онтролируемых параметров и др.; помещение
вычисJJительного 1юмш1екса; помещение информационно­
го 1юмшrекса; рнд вспомогатеJiьных помещений. ПJIО­
щадь отдельных помещений выбирается из расчета I(О­
лич�ства размещаемого оборудования с соблюдением
необходимых норм обслуживания и организации места
для обслуживающего персонала.
СПИСОК ЛИТЕРАТУРЫ
J. Основы
электроизмерительной
тсхникн/М. И. Левин,
В. Т. Прыт�ов, Р. М. �емидова-Панферова, Е М. Кутяшова; Под
ред. М. И. J1евина. - М. . Эиерrия, 1972.- 544 с.
2. ПGпGв В. С. Теоретическая электротехника. - М.: Энергия,
1978. - 558 с.
3. Попов В. С. Электрические измерею1я. - М.: Э нергия, 1974.373 с.
4. Справочн11к по радиоизмерительным приборам: В 3-х т. Т. 1.
Измерение напряжений. параметров э.1Jементов и цепей. Источники
питаиия/Б. Л. Абубакиров, А. А. Лвдеева, М. Л. Гуревич и др.;
Под ред. В. С. Насоrюва. - М.: Сов етское радио, 1976. - 232 с.
5. Справо•шик по радиоизмерительным приборам: В 3-х т. Т. 2.
Измерение частоты, времени и мощности. Измерите.�ьные геиерато­
ры/Ю. И. Алехин, Б. И. Ананчев, С. Г. Афанасов и др.; Под ред.
В. С. Насонова. - М.: Советское радио, 1978. - 272 с.
6. Справочник по радиоизмерительным приборам: В 3-х т. Т. 3.
Измерение эJ1ектромагнитных полей. Анализ спектра. Осцил.1огра­
фия. ИмnуJ1Ьсные измерения/Л. А. Анисимов, Е. Н. Буторин,
Г. А. Гончаров и др.; Под ред. В. С. Насонова. - М.: Советское ра·
ДИО, 1979.- 424 с.
7. Тереwин Г. J\11., Пыwкина Т. Г. Эле1<трорадиоизмсрения. - М.:
Э нергия, 1975. - 472 с.
8. Шкурин Г. П. Справочник по электро- и электрошrо-из,1ери­
тедьным приборам. - М.: Воениздат, 1972. - 448 с.
9. ЭJiектрические и.1мере11ия/Л. И. Байда, Н. С. Добротворский,
Е. М. Душин и др.; Под ред. Л. В. Фремке и Е. М. Ду:uина. -- Л.:
Энергия, 1980. - 392 с.
10. ЭJiектр,rческие измерения/К. П. Дьячеrпю, Д. И. Зорин,
П. В. Новицкий и др.; Под ред. Е. Г. Шрамкова.-М.: Внсшая шко­
ла, 1972. - 520 с.
ПРЕДМЕТНЫЯ УКАЗАТЕЛЬ
Ампе1шетр
116
61, 79. 90, 94, 105, 11?,
Ватrметр 61, 9�
Веберметр 3l4
Вероятность д оверитслъная 20
Вольтметр 61, 79, 90, 94, 105, 108,
112, 116
- цифровоr. 219
- электронныit 181
Гальванометр 82
- баллистичесю1и 85, 321
- вибрационный 8б
- осциллографи•1ескш"t 171
Генератор нзмерительньн1 209
Делитель напряже111rя 121
Единuцы физическпх RСЛ11чш1 12
Закон распределения погрешностей
18
Значение измеряемоt\ вещr•п[и_ы
- - - действитель,юе 25
- - - HCTHIHiOC 24
- нормнрующес �5. 125
Изме1>еине
магнитных вслнчюI З'гl
275
- 113'1\JЯЖеlШЯ 239
- лараметров электриt1ескuх цепе.11
145, 156, 208, 253, 271
- сдnю·а фаз 310
- тока 2Ю
- часrоты 234, 315
- энергии 295
�lнтервал дозерптельныt\ 19
К11асс 70[1ности СJ>едсто из:мсрен1пt
26
l(ом11енсатор переменноrо тока 152
- ПОСтt)ЯИl:IОfО ток::t 148
измсрите.11ьио-вычисли...
](омппекс
тельно1f1 375
l(оэффнцнент тра11сформацю:
- действительный 47
- номнин.nы-1.ый: 47, 48
l(риоая иамаrничиваиия 330, 334
- МОЩIЮСТИ
Лоrометр 78, 92, l01, 262
.Ма,·азин емкос-,·еi! 39
- нидуктишюстей 38
- сопро11шлс,щt\ 36
.Мера 12, 31
Ме-rод днфференцнальш,111 15
- замещеflия Iб
- иеnосредственной оценки LS
- иумвой 15
- сравие1-шя 15
1'1е>:аннзм из,.,,rерительныti 72, 87,
l0l, 108, 169, 171, 241
11\oc·r 142
- цнфровой 230
- •1етL1рехnлс•шй (одинар,�ый\ 142,
263
- шестнплечий (двойной) 267
Норы1•ровонне пределов доnускас•
мых nоrрсшностеl\ 27, 218
388
Обработка ре,ультатов измереннn
ll, 22
Он:>е..з.еление харли:,ернсrик маt·tштных материалов 332
Ощиллоrр,,ф све1·олучсвой 170
-- электронно•лучевоИ 200
Петля rнстерезиса 331, 335
Поrреш11ос1 ь намерения 16, 239
- средств измерепиn 24. 124, 136
Полоса чаtтоr рdбочая осцнллш·ра-фнческо1·0 rальва,юме'\'ра 173
Преобразователь 12, 14, 42, 120
- аналоrо-ц11фроооll 217
- 11сэлектр11ческой величины 350,
353
- перемеиноrо тока n посто.ш1ный
112
- термо,,;ектрнчесю1ii 116, 368
- Хо.r.л" 329
Прнбо1> 11змер11тель11шl 1?., 11
- - 8ШJЛ0ГОВЫ(I 59
- - ПОК:dЗЬlВdЮЩИfi 59
- - реrистрирующн!I 158
- - ц11фровои 217
Резистор добаоочи ыr, 42
Система единиц международная 12
Сие1ема нзмсрнтельно�ннфор!',tацн.01111оя 12, 14, 373, 377
Сопротивление крн 11tt1ecкoe 8-1
Средства 11змереннi1 12
Тензоре&истор 357
Те1эморе:.шсrор 366
Тринсформатор нзме1нпелънu:И 1н1nр�жения 46. 52
- - тока 46, 18
Успоконтель 69, 76
Устроr,стuо отсчетпое 61
Фазометр 61
- :,ле1<чюмеханн1,ескнf1 311
- электронныr, 313
Феррометр 337
Характеристики
риалов 330
магнитных
мате-,
Цещ, нзыерителы1ая 72, 120. 133
Цнферблат прибора 61
'Частотомер цнфроrюn 234
- электромека1111ческиi1 315
- элеrпронный 317
ЧувсТВ.НТЫ'JЬНОСТЬ
измеJ)lliеJУЪНОГО
механизма 29
- - преобразователя 129
- - прибор� 28
- мостовой цеn11 266
Шкала прибора 61
Шу�ат 4.2
Эt<Р8НИJЮ831111С 88, 104, 22fi
Эле:мент нормнльиый 32
ЭтаJюн t>дшнщы физнлескоfr nел.и­
чш,ы 40
ОГЛАВЛЕНИЕ
Предисловие
)Зведение
Гл а в а п е р в а я. Основные метролоr11ческие понятия. Методы измерений и погрешности
1.1. Опреде.nсн11е н кJ1ассификация измерений, методов и
средств измерений. Единицы физических величин
1.2. Погрешности измерений
.
1.3. Погрешности средств измерений
1.4. Характеристики э.'1ектроизмерите.1ы1ых riриборов
Г л а в а в т о р а я. Меры ос11овных электрических величин
.
2.1. l(лассификаuия мер
.
2.2. Меры единиц эJ1ектрнческих ве.qичин
2.3. Эталоны единиц электрических величин
Г JI а в а т р е т ь я. Преобразователи токов и напряжений
3.1. Шунты и добавочные резисторы
.
3.2. Измерительные трансформаторы. Общие понятия
3.3. Измерительные трансформаторы тока
3.4. Измерительные трансформаторы напряжения
.
3.5. Измерительные трансформаторы постоянного тока .
3.6. Лабораторная работа № 1. Поверка измерительных
трансформаторов тока
Г л а в а ч е т в е р т а я. Общие сведения об аналоговых э.qектро11Змер11телъных приборах
4.1. Общие вопросы
.
4.2. Технические требования
4.3. Отсчетные устройства
. .
.
4.4. Устройства для создания противодействующего момента
. . . .
4.5. Устройства для создания успокаивающего моме1на
4.6. Габаритные размеры приборов
Гл а в а п я т а я. Измерительные механизмы приборов II их
применение
5.1. Общие сведения
5.2.
5.3.
5.4.
5.5.
5.6.
.
.
. •
.
М аrнитоэлектричешие механизмы .
Магнитоэлектрические амперметры и вольтметры .
Гальванометры магю1тоэлектрической системы . .
Электродинамические и ферродинамическне механизмы
Амперметры и вольтметры электродинамической и
ферродинамической систем •
3
5
12
12
16
24
28
31
31
32
40
46
48
52
54
56
59
59
60
64
67
68
70
72
72
73
79
82
87
94
389
5.7 . Ваттметры электродинамическоfi и ферродинамической
систем
. .
.
.
. . .
5.8. Механизмы электромагнитной системы
.
. .
5.9. Электростатические механизмы и их применение
5.10. Выпршштельные амперметры и Dольтметры
5.11. Термоэлектрические амперметры и вольтметры
5.12. Лабораторная работа No 2 Поверка вольтметров
и амперметров
Гл а в а ш е с т а я. Эл�ктрическ11е измеритеJtьиые цепи
6.1. Общие сведения . . . . . . .
.
6.2. Основные ураЕиения и сnойства измерительных пре•
образователей .
. .
. . . .
6.3. Измерительная цепь как преобразоватсJ1ь
6.4. Методы коррекции погрешностей
6.5. i\1\остовые цепи
6.6. Ко:1шснсационныс цепи
.
.
.
.
. . . .
6.7. Лабораторная работа № 3. Измерение сопротивлений
. . . .
одинарным мосто\1 . . . . .
6.8. Лабораторная работа No 4. Измерение индуктивности
и емкости мосто�1 переменного TOI<a •
•
•
•
6.9. Лабораторная работа J'.iЪ 5. Поверка прибсров при
помощи компенсатора г.остояшюго тока
f л ав а с е д ь м а я. Регистрирующие приборы
7.1. Общие сведения
.
7.2. Методы регистрации
.
7.3. Виды диаграммных лент
7.4. Регистрирующие устройства
.
7.5. Самопишущие приборы прямого действия
7.6. Светолучевые осциллографы
. .
.
. . . .
7.7. Лабораторная работа № 6. Изучение светолучевого
осци.� •юграфа и его применение
r JI а в а
в о с ь м а я. Эле1сrро1111ые измеритеJIЬные приборы
Классификация. Общие сведения
Электронные воль·tметры . .
Электронно-лучевые осциллографы
Электронные омметры .
.
.
. . .
Из�1ерительные генераторы
. .
Лабораторная работа No 7. Изучение эле,проrпю-лучевого осциллографа и его применение
. . . .
8.7. Лабораторная работа No 8. Изучение работы элек•
тронного вольтметра
Г JI а в а д е в я т а я. Цифровые измерительные приборы и
аналого-цифровые преобра�ователи
9. 1. Основные оnределения, общие свойства цифровых из•
мерительных приборов и аналого-цифровых преобра•
.
.
.
зоватслсii
.
.
9.2. Цифровые вольтметры постоянного и переменного тока
9.3. Цифровые мосты постоянного и переменного то1<а
9.4. Комбинированные цифровь:с прнборы
.
9.5. Измерители частоты и интервалов времени
8.1.
8.2.
8.3.
8.4.
8.5.
8.6.
390
98
101
108
112
116
118
120
12)
121
133
136
142
147
155
156
156
158
158
160
164
165
167
170
176
179
171:J
181
2СО
208
209
215
216
217
217
219
230
232
234
9.6 . Лабораторная работа No 9. Изуче1ше и применение
цифрового вольтметра
r л а n а де с я т а я. Измерение тGк<ш и напряжений
238
239
10.1. 1\1ето..1.ические поrрешиости
.
.
10.2. Методы измерения nостошшых токов и напряжений
10.3. Метод1.>1 измерения перемениых токов и напряжеииii
.
промышленной частоты
.
.
.
10.4. Особенности измерения токов н напряжений ПО13Ышенной и высокой частоты
r л а 13 а- од и н н а д ц а т а я. Измерение сопротивлений, емкостей, индуктивностей
239
240
. . . .
.
11.1. Общие сnедепия .
11.2. Основные ме1оды и средства измерения со11ротивJJен11я электрнческой цепи постоя111юму току
11.3. Измерение емкости и индуктивности
Г л а n а д n е н а д ц а т а я. Измерение мощности
12.1. Общие сведения
12.2. Измерение мощности в цепях nостояниоrо т01<а .
12.3. Измерение активной мощности в цепях переменного
тока
.
.
. .
. .
.
12.4. Измерение реактивной мощности
.
.
. .
12.5. Лабораторная работа No 10. Измеренне мощности в
трехфазной цепи двухэлементным 13аттметром
253
Гл а n а т р и н а д ц а т а я. Измерение знерrии
295
295
295
301
13.1.
13.2.
13.3.
13.4.
Общие сведення
.
. .
.
Одноэле�1ентный индукционный счетчик
.
.
Двух- и трехэJ1емент11ые иидукционные счетчики
Схемы Вl{Jiючения счетчиков д.�я учета актпвноi; и
. . . . . .
реактивной энергии
. .
.
13.5. Лабораторная работа No 11. Поверка однофаз:;оrо
инду1щионноrо счетчика . . . . . . . .
13.6. Лабораторная работа № 12. Измерение актиnноii и
реакrнвной энергии в трехфазной цеrш
Гл а в а ч е т ы р н а д ц а т а я. Измерение фазового сдвиrа
и частоты
14.1. Из11ере!ше фазового сдвиrа
14.2. Измерепие частоты
.
.
. . . . .
14.3. Лабораторная работа № 13. Из!v1срение коэффнuнента NOЩHOCTI!
.
Гл а в а
15.1.
15.2.
15.3.
15.4.
15.5.
15.6.
п я т п а д ц а т а я. Измерение магнитных величин
Общие сведеnия .
. .
.
Из;,1ерение магнитного потока в постоянно\! магнитном поле .
. . . . . . .
. . . .
Измерение магнитной индукции и напряженности миrнипюrо поля . . . . . . . . . .
Основнь1е хар<1ктеристикн магнитных матершlJ!ов
.
Опредслен11е статических характеристик
.
Определение динами,1еских характер11сти1,
247
252
253
254
271
275
275
277
279
286
293
303
307
309
310
310
315
320
321
321
321
325
330
332
337
391.
15.7. Ваттметровый метод определения потерь на перемаг1111чивание . .
15.8. Лабораторнаи работа .Nl> 14. ·из�;сре�ше · 11а;1ря�:�11:
нoL--r11 магннтноrо поля и ыа1 нитной 1ш,1укции
Гл а в а ш е с т н а д ц а т а я. Электрические 11змереи11я незлектр11ческ11х ведич1ш
16 1. Общие сведення об l'З�1ереп1,шх 11сэ,1ектр1:-1сс1шх ве.
.
. . . . . . . . .
личин .
16.2. Характерист11к11 пз"1ерительных nрсобразовате.,�ей не. . .
эле1нричсских вел11ч1111 .
.
. .
16.3. Классификация нзмерптельных преобразовате.1ей
16 4. Резистнвные 11змер11тельные преобразователи .
16.5 Электромагннтн1;:1е 11змер11тельные преобраJователн
16.6. Электростатичесrше измерительные преобразователи
16.7. Теrшовые измер111е.1ыще преобразовате:111
. . .
16 8. Элею·рохr1мические 11змеритеJ1ы1ыс преобразователи
16.9. Лабораторная работа № 15. Из�1ере1111с температуры
при помощи терморезисторов
Глав а
с е м н а д ц а т а я. Измер11телы10-1111формац11онные
системы
17.1. Общ11с сnеде1mя
17.2. Государственная система приборов II агреrат11ыс
комплексы
. . .
17.3. Основные структуры ИИС
Список лнтературы
Предметный указатель
3�5
348
350
350
351
353
355
360
364
366
370
371
373
373
375
377
387
388
POЗAJIЩI 11ШХIU1ЛОБНА ДЕМИДO3А-ПАНФЕРО3А
nитллии НИl(ОЛАЕВИЧ МАJJИНОВСl(Ий
ВЛЛДИJ\\.ИР СЕРГЕЕВИЧ ПОПОВ
13ЯЧЕСJlЛ3 ФЕДОРОВИЧ СЕМЕНОВ
J(OHCTAI!TИH НИl(О.'1АЕВИЧ ЦЕШIЯЕВ
ЭЛЕКТРИ'lЕ�КИЕ ИЗМЕРЕНИЯ (С JIЛБОРАТОРНЫМИ РАБОТАМИ)
Редактор А А. М о ж е ,;:, к о
Рсдак,ор 11эдательст11а Л. А. Реш м II на
Техю1чсгкнl\ редактор А С, Д а в ы д о в а
Корректор Г А. П о л о и с к а я
ИБ N, 1561
Сдано в набор 22 12 81. Подпнса110 n печать 16 03 82. Т-06826.
Формат 84Х !081/., Бу••ага тнnоrрафская Jlf• 1. Гари шрифта лнтера­
тур11аи Пе•,ать высокая. Усл nеч л 26.58. Усл кр.-отт. 20. 7�­
у,, -изд. п 21,62 Тнраж 75000 зю. ЗаhЗЗ l\o 970 Ue11a 90 к.
Э11срrоичдат, 113114, Москва, М-114, Шшоэо11ая наб, 10
DJ1ад11мирска11 тнпоrрафия «Союзnол11rрафn1юма� при l'осударствешюм
комnте-rе СССР по делам нздатсльств. nолиrр,1ф1111 и юшжиоl\ торговли
600000, г. Влади'1ир, Октябрьсю1й проспект, д. 7
©
Энерrонздат, 1982