")
Министерство науки и высшего образования Российской Федерации
Федеральное государственное автономное образовательное учреждение
высшего образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Факультет
Кафедра
Направление
«Политехнический институт»
«Гидравлика и гидропневмосистемы»
15.04.02 – «Технологические машины и оборудование»
ЗАДАНИЕ
на курсовой проект студенту группы
(фамилия, имя, отчество полностью)
Спроектировать мехатронный модуль, состоящий из пропорционального распределителя и гидроцилиндра, обеспечивающий следующие режимы работы:
- полоса пропускания при гармоническом входном сигнале не менее 0,5 Гц;
- массовая нагрузка 5000 кг;
- постоянная внешняя однонаправленная нагрузка величиной 500 кН;
- амплитуда перемещений на частоте 0,3 Гц не менее 30 мм;
- динамическая ошибка не более 10 %;
- запаздывание по фазе на частоте не более 3 град.
Нужно:
1. Разработать гидравлическую схему модуля.
2. Выполнить необходимые проектировочные расчёты.
3. Определить необходимый уровень давления питания из стандартного диапазона.
4. Определить требуемую производительность насосной станции с учётом
гармонического сигнала управления, и подобрать насос, двигатель и т.д.
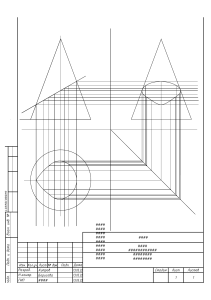
5. Разработать конструкцию мехатронного модуля (без аккумулятора), выполнить сборочные чертежи модуля.
6. Рассчитать динамические характеристики модуля.
Изм. Лист № документа Подпись Дата
Разраб.
Пров.
Н. контр.
Утв.
15.04.02.2023
Лит.
Проектирование мехатронного модуля
К
Лист
2
Листов
23
ОГЛАВЛЕНИЕ
1 РАСЧЁТ МЕХАНИЧЕСКИХ НАГРУЗОК
1.1 Гидравлическая схема мехатронноого модуля ...................................... 4
1.2 Построение диаграммы нагрузки ............................................................ 5
2 ВЫБОР АППАРАТУРЫ
2.1 Пропорциональный распределитель ..................................................... 10
2.2 Насос и приводной двигатель ................................................................ 12
2.3 Гидравлический аккумулятор ................................................................ 15
2.4 Предохранительный клапан ................................................................... 16
3 ЛОГАРИФМИЧЕСКИЕ ХАРАКТЕРИСТИКИ МЕХАТРОННОГО
МОДУЛЯ.......................................................................................................... 17
ЗАКЛЮЧЕНИЕ ............................................................................................... 22
БИБЛИОГРАФИЧЕСКИЙ СПИСОК ........................................................... 23
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
3
1 РАСЧЁТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК
1.1 Гидравлическая схема мехатронного модуля
Гидравлическая схема мехатронного модуля представлена на Рисунке 1.
Рисунок 1 – Гидравлическая схема мехатронного модуля
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
4
1.2 Построение диаграмммы нагрузки
Пиступая к исследованию динамических возможностей привода необходимо прежде всего обпререлить перемещение объекта управления, в данном
случае штока гидрлцилиндра. Запишем уравнение по грамоническому закону с
заданными значениями амплитуды и частоты:
𝑥 = 𝑥0 + 𝑥𝐴 sin(𝜔𝑡),
(1)
где х ‒ текущая координата объекта управления;
х0 ‒ начальная координата объекта управления;
t ‒ время.
Дифференцируя уравнение (1) при х0=0, получаем:
𝑑𝑥
𝑑𝑡
= 𝜐 = 𝑥𝐴 𝜔 cos 𝜔𝑡,
(2)
где υ ‒ скорость движения штока гидроцилиндра.
𝑑2𝑥
𝑑𝑡 2
= 𝑎 = −𝑥𝐴 𝜔2 sin 𝜔𝑡,
(3)
где, а ‒ ускорение штока гидроцилиндра.
Уравнение движения объекта М в рассматриваемом случае имеет вид:
𝑀𝑎 = ∑ 𝐹𝑖 ;
(4)
Подставляя (3) в (4), получаем:
𝑀
𝑑2𝑥
𝑑𝑡 2
≤ 𝐹пр ,
(5)
где Fпр ‒ усилие привода на штоке гидроцилиндра.
𝐹н = −𝑀𝑥𝐴 𝜔2 sin 𝜔𝑡,
(6)
где Fн ‒ внешняя нагрузка на штоке гидроцилиндра.
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
5
Для получения уравнения зависимости скорости перемещения штока гидроцилиндра от внешней нагрузки, решим следующую систему уравнений:
𝐹н = −𝑀𝑥𝐴 𝜔2 sin 𝜔𝑡
,
{
𝜐 = 𝑥𝐴 𝜔 cos 𝜔𝑡
−𝐹н
𝑀𝑥𝐴 𝜔2
𝜐
{
𝑥𝐴 𝜔
[
−𝐹н
𝑀𝑥𝐴 𝜔
(7)
= sin 𝜔𝑡
= cos 𝜔𝑡
2
] +[
2
𝜐
𝑥𝐴 𝜔
,
(8)
2
] = 1,
(9)
Выразим из уравнения (9) скорость движения штока гидроцилиндра:
𝜐 = 𝑥𝐴 𝜔√1 − [
−𝐹н
𝑀𝑥𝐴 𝜔
2
] ,
2
(10)
Воспользуемся программной Mathcad и получим требуемую диаграмму
нагрузки, представленную на Рисунке 2.
Рисунок 2 – Диаграмма нагрузки
По Рисунку 2 видно, что максимальное усилие Fн max = 533 Н, а максим
мальная скорость , υmax = 0,057 .
с
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
6
Следующий шаг – выбор стандартных значений давлений по ГОСТ
12445-80 «Гидроприводы объёмные, пневомприводы и смазочные системы».
Значения номинальных давлений в МПа должны выбираться из ряда:
Рисунок 3
Рассчитаем значения площадей поршня в зависимости от номинального
значения давления, расчетные диаметры поршня при этих значениях площади.
П р и м е ч а н и е – Коэффициент дифференциации выбираем k = 2,5.
𝑆п =
𝐹н 𝑚𝑎𝑥
𝑃ном
(11)
𝐴п
𝐷=√
𝜋
1
−
4 𝑘−1
(12)
Диаметр штока выбирается из соотношения:
𝑑
= (0,4 … 0,5)
𝐷
(13)
Округляем до ближайшего значения из рекомендуемых размеров
𝑑 = (0,4 … 0,5) ∙ 𝐷
Таблица 1
𝑃ном
𝑃ном = 2,5 МПа
𝑃ном = 4 МПа
𝑃ном = 6,3 МПа
𝑃ном = 10 МПа
𝑃ном = 12,5 МПа
Изм. Лист № документа
Подп.
𝑆п
0,213 см2
0,133 см2
0,085 см2
0,053 см2
0,043 см2
Дата
(14)
D
42 мм
33 мм
27 мм
21 мм
19 мм
d
21 мм
16,5 мм
13,5 мм
10,5 мм
9,5 мм
15.04.02.2023.006.155.00 КП
Лист
7
Построим характеристику привода и определим наиболее оптимальный
вариант:
𝑝н − 𝐹пр ⁄𝑆п
𝜐 = 𝑘√
,
𝜌
где k − коэффициент, k =
μfдр.max
Aп
(15)
, зададимся k = 0,005;
ρ − плотность рабочей жидкости ρ = 850 кг/м3 для АМГ-10.
На рисунке 4 представлены следующие характеристики:
v (F) – диаграмма нагрузки, v1 (F) – при Pном = 2,5 МПа; v2 (F) – при
Pном = 4 МПа; v3 (F) – при Pном = 6,3 МПа; v4 (F) – при Pном = 10 МПа; v5 (F)
– при Pном = 12,5 МПа
Рисунок 4
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
8
По полученным данным выберем гидроцилиндр одностороннего действия. Диаметр поршня цилиндра D = 50 мм, диаметр штока d = 25 мм. Параметры выбранного гидроцилиндра представлены в Таблице 2.
Таблица 2
Рабочее давление
Диаметр поршня
Диаметр штока
Максимальная скорость
Ход
Температура эксплуатации
Объёмный КПД
Полный КПД
160 бар
от 25 мм до 200 мм
от 12 мм до 140 мм
1 м/с
от 0 до 6000 мм
от –20 до +80 ℃
0,98
0,92
Рассчитаем максимальный расход гидроцилиндра:
𝑄𝑚𝑎𝑥
𝑄𝑚𝑎𝑥 =
Изм. Лист № документа
𝜐 ∙ 𝐴п 𝜐 ∙ 𝜋 ∙ (𝐷2 − 𝑑 2 )
=
=
𝜂оГЦ
𝜂оГЦ ∙ 4
0,271∙𝜋∙(0,0502 −0,0252 )
0,98∙4
Подп.
Дата
= 4,072 ∙ 10−4
м3
с
(16)
= 24,432 л/мин
15.04.02.2023.006.155.00 КП
Лист
9
2 ВЫБОР АППРАТУРЫ
2.1 Пропорциональный распределитель
В качестве распределителя выбираем 4WS2EM6-2X/25 B11XET 210 K17
V фирмы Bosch-Rexroth со следующими характеристиками:
Максимальный расход Q ЭГУmax = 27
л
мин
.
Максимальное рабочее давление pЭГУmax = 31,5 МПа.
Уточним значение коэффициента k для данного сервораспределителя.
Расход определяется по формуле:
(17)
𝑝𝑐
𝑄р = 𝜇𝑓др.𝑚𝑎𝑥 √
𝜌
Выразим из формулы (3.1) 𝜇𝑓др.𝑚𝑎𝑥 :
𝜇𝑓др.𝑚𝑎𝑥 =
𝑘=
𝑘=
𝑄р
𝑝
√ 𝜌𝑐
𝑄р
𝑝
√ 𝜌𝑐 ∙ Aп
4,072 ∙ 10−4
106
√2,5 ∙
850
∙
(18)
π(0,052
−
4
0,0252 )
(19)
= 5,099 ∙ 10−3
Характеристика привода с полученным коэффициентом 𝑘 представлена
на Рисунке 5.
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
10
Рисунок 5 – Характеристика привода при выбранном распределителе
υ1(F) ‒ характеристика при k = 0,005; υ11(F) ‒ характеристика с рассчитанным коэффициентом k; υ(F) ‒ эллипс нагрузки.
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
11
2.2 Насос и приводной двигатель
𝑄сист (𝑡) = 𝐴п ∙ 𝑥𝐴 ∙ 𝜔 ∙ sin(𝜔𝑡)
(20)
Полученная диаграмма расхода показана на Рисунке 6.
Рисунок 6 – Циклограмма расхода 𝑄сист (𝑡), л/с
Найдем средний потребляемый расход:
𝑡2
𝑄ср = ∫ 𝑄сист (𝑡)𝑑𝑡
(21)
0
𝑄ср = 4,78
л
.
мин
Таким образом, выбираем насос Bosch-Rexroth AZPB-32-5.0 со следующими характеристиками:
Рабочий объем 5
см3
об
Минимальная частота вращения 750
Изм. Лист № документа
Подп.
Дата
об
мин
15.04.02.2023.006.155.00 КП
Лист
12
Максимальная частота вращения 6000
об
мин
Максимальное давление 27 МПа
Расход насоса посчитаем по формуле:
𝑄н = 𝑞н ∙ 𝑛 ∙ 𝜂об
(22)
При частоте вращения приводного электродвигателя 750
об
мин
расход со-
ставит:
𝑄Н = 5 ∙ 750 ∙ 0,97 = 3,64
л
.
мин
Потребляемая насосом мощность:
𝑁п = 𝑄Н ∙ 𝑝с
(23)
𝑁п = 3,64 ∙ 2,5 ∙ 106 = 150 Вт.
В качестве приводного двигателя выбираем АИР 71А2. Получаем следующие характеристики:
Мощность 0,75 кВт.
Скольжение 4%.
КПД 75%.
Диаграмма расхода, совмещенная с расходом насоса, показана на Рисунке
7.
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
13
Рисунок 7 – Циклограмма и расход насоса, л/с
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
14
2.3 Гидравлический аккумулятор
Требуемый объем аккумулятора определим по формуле:
𝑡2
𝑉акк треб = (∫ 𝑄сист (𝑡)𝑑𝑡) − [(𝑡2 − 𝑡1 ) ∙ 𝑄н ]
(24)
𝑡1
где время 𝑡2 и 𝑡1 определим из пересечения графиков на Рисунке 7,
𝑡1 = 0,278 с, 𝑡2 = 1,402 с.
𝑉акк треб = 0,0472 л.
Необходимый объем аккумулятора:
𝑉акк треб
𝑉акк =
1
1
𝑝з 𝑘
𝑝з 𝑘
[(𝑝 ) − (𝑝
) ]
𝑚𝑖𝑛
𝑚𝑎𝑥
(25)
где pз − давление зарядки аккумулятора, которое равно (0,7 … 0,9)pmin ;
pmin − минимальное давление в аккумуляторе, равное максимальному
давлению в системе;
pmax − максимальное давление в аккумуляторе, равно (1,2 … 1,3)pmin .
0,0472
𝑉акк =
1
1,4
0,9 ∙ 2,5
[(
)
2,5
1
1,4
0,9 ∙ 2,5
−(
)
1,3 ∙ 2,5
= 0,298 л
]
Выбираем гидравлический аккумулятор HYDAC SBO со следующими характеристиками.
Максимальное давление 30 МПа;
Объем 1,4 л;
Максимальный расход 35
Изм. Лист № документа
Подп.
Дата
л
мин
.
15.04.02.2023.006.155.00 КП
Лист
15
2.4 Предохранительный клапан
В качестве предохранительного клапана выбираем КПМ 6/2P-УХЛ1 с
диапазоном настройки 2 … 25 МПа, расход до 35 л/мин.
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
16
3
ЛОГАРИФМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ
МЕ-
ХАТРОННОГО МОДУЛЯ
Для получения ЛЧХ мехатронного модуля, необходимо создать его математическую модель.
Расчетная схема привода представлена на Рисунке 8.
Рисунок 8 – Расчетная схема привода
Запишем уравнения, описывающие движение мехатронного модуля.
Уравнение движения по II закону Ньютона:
𝑑2𝑥
𝑑𝑥
𝑑𝑥
𝜈
𝑀 2 = 𝑃1 𝐴 − 𝑃2 𝐴 − 𝐹вн − 𝑐𝑥 − 𝐹тр 𝑠𝑖𝑔𝑛
− 𝐹тр
𝑑𝑡
𝑑𝑡
𝑑𝑡
(26)
Расходы на гидроцилиндре:
V dP dx
dx
A1 = 0 1 + A1 ,
E dt
dt
dt
V dP
dx
dx
Q 2 = −Q 2сж + A2 = − 0 2 + A2 ,
E dt
dt
dt
Q1 = Q1сж +
Изм. Лист № документа
Подп.
Дата
(27)
15.04.02.2023.006.155.00 КП
Лист
17
Решим относительно первой производной по давлению:
𝑑𝑃𝑖 𝑉0 𝑑𝑥
= [ 𝐴𝑖 − 𝑄𝑖 ]
𝑑𝑡
𝐸 𝑑𝑡
Тогда система уравнений для давлений:
(28)
(29)
𝑉0
𝑑𝑥
−
𝐴] ,
[𝑄
1
𝑑𝑝1
𝐸
𝑑𝑡
={
𝑉0 𝑑𝑥
𝑑𝑡
[| | 𝐴 − 𝑄1 ] ,
𝐸 𝑑𝑡
𝑑𝑥
>0
𝑑𝑡
𝑑𝑥
при
<0
𝑑𝑡
при
𝑉0 𝑑𝑥
при
[ 𝐴 − 𝑄2 ] ,
𝑑𝑝2
𝐸
𝑑𝑡
={
𝑉0
𝑑𝑥
𝑑𝑡
при
[𝑄2 − | | 𝐴] ,
𝐸
𝑑𝑡
Уравнение баланса расходов в системе:
Расход насоса:
𝑑𝑥
>0
𝑑𝑡
𝑑𝑥
<0
𝑑𝑡
𝑄с = 𝑄н − 𝑄кл − 𝑄а
(30)
(31)
𝑄н = 𝑄т − 𝐾𝑄𝑃н ∙ 𝑃𝑐 , при 𝑃𝑐 > 0
{
𝑄н = 𝑄т , при 𝑃𝑐 < 0
Расход предохранительного клапана:
(32)
0, при 𝑃𝑐 < 𝑃0 кл
𝑄кл = { 𝑃𝑐
, при 𝑃𝑐 ≥ 𝑃0 кл
𝐾𝑃𝑄кл
Расход аккумулятора:
(33)
1
(34)
𝑉𝑎
𝑃3 𝑘 𝑑𝑃с
𝑄а =
∙( )
𝑘 ∙ 𝑃𝑐 𝑃𝑐 𝑑𝑡
Расход сервоклапана:
|𝑝с − 𝑝1 |
𝑘𝑄𝐼 |𝐼|√
(1 −
𝜌
(35)
−𝑡
𝑒 𝑇 ),
при 𝐼 > 0
𝑄1 =
−𝑡
|𝑝1 |
𝑇 ),
𝑘𝑄𝐼 |𝐼|√
−
𝑒
(1
𝜌
{
Изм. Лист № документа
Подп.
Дата
при 𝐼 < 0
15.04.02.2023.006.155.00 КП
Лист
18
(36)
−𝑡
|𝑝2 |
𝑘𝑄𝐼 |𝐼|√
(1 − 𝑒 𝑇 ) ,
𝜌
при 𝐼 > 0
𝑄2 =
−𝑡
|𝑝с − 𝑝2 |
𝑘𝑄𝐼 |𝐼|√
(1 − 𝑒 𝑇 ) ,
𝜌
{
при 𝐼 < 0
Логика переключения расходов:
𝑄 , при 𝐼 > 0
𝑄1 = { 𝑐
−𝑄сл , при 𝐼 < 0
(37)
𝑄 , при 𝐼 > 0
𝑄2 = { сл
−𝑄𝑐 , при 𝐼 < 0
(38)
Таким образом, внесем полученную модель в программу Vissim и произведем расчет требуемых параметров системы.
Plot
4.0
3.8
3.6
3.4
3.2
3.0
0
.2
Изм. Лист № документа
.4
Подп.
.6
Дата
.8
1
Time (sec)
1.2
1.4
1.6
1.8
15.04.02.2023.006.155.00 КП
2
Лист
19
Данные для построения ЛАЧХ и ЛФЧХ указаны в табл. 4.1, где
𝜔 − частота входного сигнала, Гц;
𝐴вх − амплитуда входного сигнала, А;
𝐴вых − амплитуда выходного сигнала, об;
𝜏 − время отставания выходного сигнала от входного, с;
𝑇 − период колебаний выходного сигнала, с;
𝜏
𝜑(𝜔) = −360° − фазовая характеристика, град;
𝑇
𝐴вых
𝐿(𝜔) = 20 lg (
ω
0,25
0,5
0,75
1
2
4
5
7
10
15
20
25
Aвх
0,03
0,03
0,03
0,03
0,03
0,03
0,03
0,03
0,03
0,03
0,03
0,03
𝐴вх
Aвых
0.105
0.049
0.032
0.022
0.012
5.75e-3
4.65e-3
3.35e-3
2.1e-3
1.5e-3
1.1e-3
9e-4
) − амплитудная характеристика, Дб.
Таблица 6.1. Данные для построения ЛАЧХ и ЛФЧХ.
t
T
W(s)
φ(ω)
L(ω)
3.5
-26,82
37.64
0,745
10
1.617
-27
37.436
0,15
2
1.05
-27,068
36.917
0,1
1,33
0.733
-27,72
35.835
0,077
1
0.392
-32,4
29.632
0,045
0,5
0.192
-43,2
19.617
0,03
0,25
0.155
-50,4
15.464
0,028
0,2
0.112
-62,937
9.4
0,025
0,143
0.07
-72
3.083
0,02
0,1
0.05
-75,224
-3.646
0,014
0,067
0.037
-75,6
-8.109
0,0105 0,05
0.03
-75,6
-11.36
0,0084 0,04
Полученные ЛАЧХ и ЛФЧХ представлены на Рисунке 10 и 11.
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
20
1
Рисунок 10 – ЛАЧХ
Рисунок 11 – ЛФЧХ
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
21
ЗАКЛЮЧЕНИЕ
В ходе выполнения курсового проекта была разработана гидравлическая
схема мехатронного модуля, выполнены проектировочные расчеты и определены подходящие компоненты системы. Также была разработана конструкция
мехатронного модуля.
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
22
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Гамынин Н.С. Гидравлический привод систем управления. / Н.С. Гамынин – М.: Машиностроение, 1972. – 376 с.
2. Свешников В.К. Станочные гидроприводы: Справочник: Библиотека конструктора / В.К. Свешников – 4-е изд. перераб и доп. – М.: Машиностроение,
2004. – 512 с.
3. Хохлов В.А. Электрогидравлический следящий привод / В.А. Хохлов – 2е изд. доп. – М.: Наука, 1966. – 240 с.
4. Чупраков Ю.И. Гидропривод и средства автоматики / Ю.И. Чупраков:
учебное пособие для вузов по специальности «Гидропривод и гидроавтоматика» – М.: Машиностроение, 1979. – 232 с.
Изм. Лист № документа
Подп.
Дата
15.04.02.2023.006.155.00 КП
Лист
23