ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Государственное образовательное учреждение
высшего профессионального образования
САНКТ'ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
АЭРОКОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ
В. Ф. Дмитриев
УСТРОЙСТВА
ИНТЕГРАЛЬНОЙ ЭЛЕКТРОНИКИ
Акустоэлектроника
Основы теории, расчета и проектирования
Учебное пособие
Санкт'Петербург
2006
УДК 621.382(075)
ББК 32.844.1
Д53
Рецензенты:
Федеральное государственное унитарное предприятие «НИИ Век'
тор»;
доктор технических наук, профессор П. Н. Петров
Дмитриев В. Ф.
Д53
Устройства интегральной электроники: Акустоэлектро'
ника. Основы теории, расчета и проектирования: учеб. посо'
бие/ ГУАП. – СПб., 2006. 169 с.: ил.
ISBN 5'8088'0197'4
Кратко изложены физические основы акустоэлектроники, а также
общие сведения об акустоэлектронных устройствах, широко использу'
емых в современной радиоэлектронике. Рассмотрены принципы их
функционирования, конструкция, основные характеристики и мето'
ды расчета.
Предназначено для студентов специальности «Радиотехника»
(200700) при изучении дисциплин «Акустоэлектронные устройства»,
«Проектирование акустоэлектронных устройств», «Элементы акусто'
электронных устройств».
Учебное издание
Дмитриев Валерий Федорович
УСТРОЙСТВА
ИНТЕГРАЛЬНОЙ ЭЛЕКТРОНИКИ
Акустоэлектроника
Основы теории, расчета и проектирования
Учебное пособие
Редактор А. В. Подчепаева
Верстальщик С. Б. Мацапура
Сдано в набор 24.04.06. Подписано к печати 23.10.06. Формат 60х84 1/16.
Бумага офсетная. Печать офсетная. Усл. печ. л. 10,05. Уч.'изд. л. 10,5.
Тираж 100 экз. Заказ №
Редакционно'издательский центр ГУАП
190000, Санкт'Петербург, Б. Морская ул., 67
УДК 621.382(075)
ББК 32.844.1
ISBN 5'8088'0197'4
2
© ГУАП, 2006
© В. Ф. Дмитриев, 2006
Введение
Акустические волны могут существовать как в твердой, так в жид'
кой и газообразной средах, причем в технике широко используются
акустические волны во всех типах материальных сред.
Акустоэлектроника изучает процессы возбуждения, распростра'
нения, отражения и приема акустических волн (или волн деформа'
ций) в твердых телах с целью создания на их основе акустоэлектрон'
ных устройств (АЭУ) для обработки радиосигналов.
Акустическая волна в твердом теле представляет собой некоторое
возмущение, связанное с деформацией материала. При смещении
атомов из положения равновесия возникают внутренние упругие
силы, стремящиеся вернуть их в исходное положение. Благодаря вза'
имному влиянию атомов друг на друга смещение одного атома из узла
кристаллической решетки вызывает смещение соседних. Таким об'
разом возникающее возмущение распространяется внутри твердого
тела.
В большинстве материалов возвращающие силы пропорциональ'
ны степени деформации при условии, что они незначительны. Мате'
риал в этом случае называют упругим, а волны в таком материале –
упругими волнами или акустическими. В идеально упругом теле аку'
стические волны могут распространяться без затухания.
Простейшим типом волны являются плоские волны. Такие вол'
ны могут существовать только в бесконечной однородной среде. В
некоторых случаях и для некоторых типов волн бывает допустимо
рассматривать распространение волны в среде ограниченных разме'
ров как в неограниченной (если а>>λ, где а – минимальный размер
тела).
Существует два типа плоских волн:
– продольные волны, в которых узлы кристаллической решетки
колеблются вдоль направления распространения;
– поперечные волны, в которых узлы кристаллической решетки
колеблются в плоскости, перпендикулярной направлению распрост'
ранения.
Если среда, в которой распространяется волна, ограничена, то в
такой среде могут распространяться волны, локализованные вблизи
3
поверхности или поверхностные волны. В ограниченном твердом теле
могут распространяться несколько типов поверхностных волн, свой'
ства которых существенно зависят от граничных условий.
Одним из типов поверхностных волн являются рэлеевские волны.
Амплитуда этих волн экспоненциально убывает с глубиной так, что
90% переносимой энергии сосредоточено в слое глубиной ~λ. Явле'
ние распространения поверхностных волн было впервые описано лор'
дом Рэлеем в 1885 году. В настоящее время поверхностные волны
представляют наибольший интерес для практического использова'
ния.
На характер колебаний в поверхностной волне оказывают влия'
ние условия на поверхности. Так, если поверхность неметаллизиро'
вана, то нормальные компоненты тензора напряжений равны нулю,
а нормальная компонента вектора электрического смещения непре'
рывна.
В случае металлизированной поверхности металлом, не оказыва'
ющим механической нагрузки (бесконечно малой толщины), нормаль'
ные компоненты тензора механических напряжений равны нулю,
касательные компоненты электрического поля на поверхности в от'
сутствии электрического тока равны нулю, а при наличии свободных
зарядов на поверхности нормальная компонента вектора электри'
ческого смещения претерпевает разрыв, равный поверхностной плот'
ности заряда.
Приведенные выше граничные условия определяют структуру и
тип поверхностных волн, распространение которых возможно в среде.
Помимо рэлеевских волн, имеющих вертикальную поляризацию,
активно используются в настоящее время в АЭУ поверхностные вол'
ны с преимущественно горизонтальной поляризацией вектора меха'
нического смещения; вытекающие волны, имеющие комплексную
постоянную распространения даже в среде без потерь, и др.
Как объемные, так и поверхностные волны получили широкое
распространение в целом ряде устройств благодаря значительно мень'
шей скорости распространения их в твердом теле (~103 м / с) по срав'
нению с электромагнитными волнами в диэлектрических структу'
рах (3·108 м / c / ε ). Это обстоятельство позволяет существенно
уменьшить размеры устройств и выполнить их в интегральном ис'
полнении. Кроме того, эти волны являются бездисперсионными
(т. е. у них отсутствует зависимость скорости от частоты колебаний)
и они имеют небольшое затухание вплоть до сверхвысоких частот.
Практическое использование поверхностных акустических волн
(ПАВ) началось в середине 60'х годов в фильтрах для аналоговой
4
обработки сигналов, когда были предложены и реализованы устрой'
ства для их возбуждения – встречно'штыревые преобразователи
(ВШП).
Позднее устройства на поверхностных акустических волнах (ПАВ)
нашли применение в качестве фильтров промежуточной частоты те'
левизионных приемников. Затем, в радарах нашли применение дис'
персионные линии задержки в качестве устройств для формирования
и сжатия линейно'частотно'модулированных (ЛЧМ) сигналов. Бла'
годаря небольшим габаритам и весу при высокой надежности область
использования устройств на ПАВ стала быстро расширяться.
Помимо поверхностных волн, имеющих вертикальную поляриза'
цию вектора механического смещения (рэлеевских), широкое распро'
странение получили также устройства на ПАВ, использующие ПАВ
с горизонтальной поляризацией вектора механического смещения
(STW), а также «вытекающие», приповерхностные и объемные аку'
стические волны.
В настоящее время существует большое количество акустоэлект'
ронных устройств различного типа. Среди них можно выделить эле'
ментарные, на основе которых строятся более сложные устройства.
К элементарным АЭУ относятся:
– бездисперсионные линии задержки (с линейной зависимостью
фазы задержанного сигнала от частоты);
– дисперсионные линии задержки (с квадратичной зависимостью
фазы задержанного сигнала от частоты);
– многоотводные линии задержки с кодированием по фазе задер'
жанных сигналов;
– резонаторы на основе различного типа поверхностных и объем'
ных волн;
– фильтры различного типа, в том числе трансверсальные, а так'
же на основе резонаторов, использующих различные типы поверхно'
стных и объемных волн.
Элементарные АЭУ широко используются в различного рода ком'
понентах радиотехнических систем. Среди таких компонентов мож'
но выделить следующие:
– датчики различных физических величин (давления, крутящего
момента и т.д.);
– гребенчатые фильтры или банки фильтров – устройства частот'
ного разделения каналов, имеющие, как правило, один вход и от двух
до 40 выходов;
– устройства формирования и сжатия сигналов с различными ти'
пами частотной модуляции (используются в РЛС, в том числе борто'
5
вых РЛС самолетов, корабельных РЛС, наземных РЛС дальнего об'
наружения, в головных частях систем самонаведения высокоточно'
го оружия);
– устройства формирования и сжатия фазокодоманипулирован'
ных (ФКМ) сигналов (используются в РЛС со сжатием импульса и
широкополосных системах связи; наиболее популярным кодом яв'
ляется код Баркера – двухфазный код, дающий относительный уро'
вень боковых лепестков для идеальных сигналов, равный 20lgN, где
N – число элементарных символов в кодовой последовательности, не
превышающее 13);
– входные фильтры радиоприемных устройств, фильтры тракта
промежуточной частоты (ПЧ) радиоприемных и радиопередающих
устройств (например, мобильной связи);
– анализаторы спектра радиосигналов (радиоразведка);
– корреляторы, в том числе корреляторы с памятью (используют'
ся, например, в крылатых ракетах);
– генераторы высокостабильных сигналов на основе резонаторов
на поверхностных и объемных акустических волнах;
– устройства калибровки по дальности и контроля энергопотен'
циала РЛС;
– дуплексеры, сумматоры, разветвители, фазовращатели, атте'
нюаторы.
Перечисленные выше устройства используют поверхностные или
объемные акустические волны, распространяющиеся в твердом уп'
ругом теле. Среда распространения упругих волн не всегда обладает
пьезоэлектрическими свойствами. Вместе с тем пьезоэффект необхо'
дим для возбуждения акустических волн. Поэтому, в случае исполь'
зования непьезоэлектрического материала, возбуждение акустичес'
ких волн осуществляется с помощью преобразователя, состоящего
из электродов и пьезоэлектрического слоя. В этом случае для эффек'
тивной передачи возбуждаемой волны преобразователь должен иметь
хороший акустический контакт с непьезоэлектрической средой рас'
пространения акустической волны.
Частотный диапазон устройств на поверхностных акустических
волнах составляет от 10 МГц до 2 ГГц (в лабораторных образцах
до 5 ГГц), а устройств на объемных акустических волнах достигает
12 ГГц.
6
Глава 1
ОСНОВНЫЕ ТИПЫ АКУСТОЭЛЕКТРОННЫХ УСТРОЙСТВ
В данной главе в обзорном виде будут рассмотрены некоторые типы
акустоэлектронных устройств, нашедших наибольшее распростра'
нение в радиотехнических системах (РТС). Как устройства, рассмот'
ренные в данной главе, так и ряд других устройств на ПАВ, представ'
ляющих значительный интерес для использования в РТС, более де'
тально будет рассмотрен в последующих главах.
1.1. Линии задержки
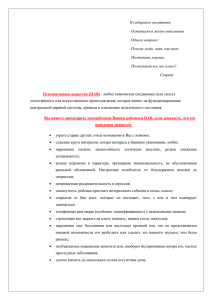
Обычная линия задержки (ЛЗ) на ПАВ (рис. 1.1) состоит из вход'
ного и выходного встречно'штыревых преобразователей, нанесенных
на поверхность пьезоэлектрической среды (звукопровода), в которой
могут распространяться поверхностные акустические волны с неболь'
шим затуханием. Линии задержки на ПАВ, как правило, имеют од'
нородные преобразователи. Под однородным преобразователем по'
нимается преобразователь с постоянным периодом и перекрытием
соседних электродов. Конструкция ЛЗ с реальными однородными
ВШП изображена на рис. 1.2. В тех случаях, когда от ЛЗ требуются
свойства частотной избирательности, в одном из ВШП линии задер'
жки используется аподизация электродов (рис. 1.3).
L
ВШП
ВШП
ПАВ
Rн
Rг
U
Вход
Звукопровод
Выход
Рис. 1.1. Линия задержки на ПАВ и способ ее включения во внешнюю
цепь (ВШП показаны условно. Rн, Rг – сопротивления нагрузки
и генератора)
7
К генератору
К нагрузке
p
Поглотитель
ВШП
Рис. 1.2. Плата линии задержки с неаподизованными электродами
в ВШП; (p – полупериод следования электродов)
К генератору
К нагрузке
Поглотитель
Рис. 1.3. Плата линии задержки, обладающей свойствами фильтра
(преобразователь, подключенный к генератору, имеет аподизованные
по функции Тейлора электроды)
Аподизацией электродов ВШП обычно называют изменение вза!
имного перекрытия соседних электродов на длине ВШП по какому!
либо функциональному закону, например в виде функции Гаусса,
Тейлора или какой!либо другой физически реализуемой функции.
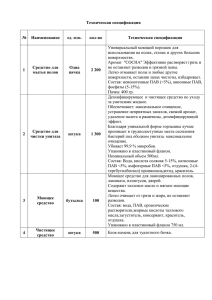
Характеристика ЛЗ во временной области показана на рис. 1.4.
Если в момент времени t0 на вход ЛЗ подать короткий импульс дли'
тельностью tи ~ 1/ ∆f , где ∆f – ширина полосы рабочих частот ЛЗ по
уровню 3 дБ, то на выходе ЛЗ появится задержанный импульс, име'
8
Aмплитуда,
отн.ед
1
1,0
1
2
A0
3
Aл
t0
0,0
0
t
–1,0
tз
2t з
Рис. 1.4. Характеристика ЛЗ во временной области:1 – импульс на
входе ЛЗ; 2 – задержанный импульс на выходе ЛЗ; 3 – «трехпролетA
ный» задержанный импульс на выходе ЛЗ (один из возможных видов
ложных сигналов в ЛЗ). A0 – вносимые потери, Aл – уровень ложного
сигнала
ющий форму, близкую к входному. Время задержки в ЛЗ на ПАВ
обычно составляет от долей микросекунды до сотен микросекунд.
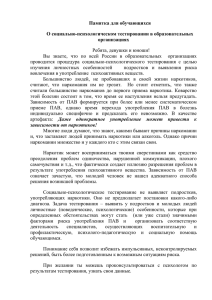
В тех случаях, когда от ЛЗ требуется относительно широкая по'
лоса рабочих частот с небольшой неравномерностью коэффициента
передачи (рис. 1.5, б), используются ВШП дисперсионного типа. В
ВШП дисперсионного типа период электродов меняется вдоль струк'
туры по определенному закону. Принципиальным является тот факт,
что оба преобразователя в такой ЛЗ должны быть идентичными. Воз'
можные частотные характеристики ЛЗ изображены на рис. 1.5, а
и 1.5, б.
Основными параметрами ЛЗ являются следующие:
– время задержки сигнала в ЛЗ;
– полоса рабочих частот;
– центральная частота;
– коэффициент передачи;
– вносимые ЛЗ потери;
– уровень ложных сигналов.
Время задержки tз определяется временем распространения сиг'
нала от входного преобразователя до выходного преобразователя
tз = L / VПАВ,
(1.1)
где L – расстояние между центрами преобразователей; VПАВ – ско'
рость распространения ПАВ в материале звукопровода. Например,
9
.
K (ω )
.
K (ωо )
а)
1
0,707
0,5
ff н
fо
f
fв
.
0
0
б)
–3 дБ
–2
–4
–6
–8
–10
fн
fв
Рис. 1.5. Частотные характеристики линии задержки: а– АЧХ узкопоA
лосной ЛЗ вида, приведенного на рис. 1.3; б – АЧХ широкополосной ЛЗ
с преобразователями дисперсионного типа. A0 – вносимые ЛЗ потери
для наиболее распространенных в акустоэлектронике материалов,
таких как ниобат лития YZ'среза VПАВ = 3488 м / с, а для кварца ST'
среза – 3158 м / с.
Полоса рабочих частот ∆f обычно определяется как разница меж'
ду верхней и нижней частотами полосы рабочих частот ЛЗ на уровне
–3 дБ (что соответствует 0,707) от максимального значения модуля
коэффициента передачи устройства (см. рис. 1.5, а):
(1.2)
∆f = fв–fн,
где fн– нижняя частота полосы рабочих частот, fв – верхняя частота
полосы рабочих частот.
10
Центральная частота есть средняя частота полосы рабочих час'
тот:
f0 = (fв+fн) / 2.
(1.3)
Коэффициент передачи четырехполюсника определяется как от'
ношение комплексных амплитуд сигналов на выходе и входе устрой'
ства:
K1 (ω) = K1 (ω) 2 jϕ( ω) = U1 вых (ω)/ U1 вх (ω).
(1.4)
где ϕ(ω) – фазочастотная характеристика устройства; U1 вх (ω),
U1 вых (ω) – напряжения на входе и выходе устройства.
Модуль коэффициента передачи имеет специальное название –
амплитудно!частотная характеристика и, выраженный в децибе'
лах, определяется следующим образом:
K1 (ω) = 20log10 U1 ВЫХ (ω)/U1 ВХ (ω) .
(1.5)
Другое определение коэффициента передачи четырехполюсника опи'
рается на понятие матрицы рассеяния S1ij . Параметр S121 матрицы рас'
сеяния имеет смысл коэффициента передачи и определяется как
b1
S121 = 2
a11
a12 = 0 ,
где a11, b12 , a12 – комплексные амплитуды падающей, прошедшей и от'
раженной от нагрузки волн, соответственно. Следует отметить, что
большинство современных приборов, пригодных для измерения элек'
трических параметров устройств на ПАВ, измеряют параметры мат'
рицы рассеяния.
Центральная частота простейшей ЛЗ f0 и полупериод следования
электродов ВШП p (см. рис. 1.4, а) связаны приближенным соотно'
шением
f0 ≈ VПАВ /(2 p),
(1.6)
где VПАВ – скорость ПАВ в звукопроводе.
Относительную полосу рабочих частот ЛЗ с однородными ВШП
(без аподизации электродов ВШП, рис. 1.3) можно приближенно
оценить по соотношению
∆f / f0 ≈ 1/(2N),
(1.7)
где N – число электродов в одном ВШП.
Вносимые потери A0 определяются как максимальное значение
коэффициента передачи устройства в полосе рабочих частот (см. рис.
1.5, а), выраженное в децибелах:
11
A0 = 20log10 ⎡⎣ Max K1 (ω) ⎤⎦ .
(1.8)
У широкополосных ЛЗ, имеющих плоскую АЧХ, вносимые поте'
ри определяют как среднее значение модуля коэффициента передачи
устройства в заданной полосе частот вблизи f0 (см. рис. 1.5, б).
Линия задержки с совмещенным входом и выходом («одновходо!
вая»). Такая линия имеет один преобразователь, который совмеща'
ет функции входного и выходного преобразователей обычной ЛЗ
(рис. 1.6). Для изменения направления распространения ПАВ на 180°
обычно используется отражательный элемент в виде многополоско'
вого ответвителя (МПО). Основным достоинством одновходовой ЛЗ
по сравнению с обычной является вдвое меньшая ее длина при той же
величине задержки и вносимых потерях. Меньшие габариты явля'
ются существенным преимуществом одновходовой ЛЗ на ПАВ по срав'
нению с обычной с задержкой в несколько десятков микросекунд и
более.
Линия задержки на объемных акустических волнах. Значитель'
но повысить рабочие частоты акустоэлектронной ЛЗ позволяет ис'
пользование объемных акустических волн – продольных или попе'
речных, вместо поверхностных. Линия задержки, использующая
какой'либо тип объемных волн, имеет преобразователи, предназна'
ченные соответственно для возбуждения и приема объемных волн.
Поскольку такие ЛЗ обычно используются на высоких частотах
(до 12 ГГц), главное требование к материалу звукопровода – неболь'
шие потери при распространении акустической волны. Сама среда, в
которой распространяется акустическая волна, как правило, не об'
ладает пьезоэлектрическими свойствами. Поэтому необходимы пре'
б)
а)
Приемник
вшп
L
мпо
ПАВ
Вход (Выход)
Циркулятор
Согласованная
нагрузка
Линия
задержки
Генератор
радиоимпульсов
Рис. 1.6. «Одновходовая» линия задержки (а) и схема ее включения при
использования в качестве имитатора цели для РЛС (б). ВШП и МПО
показаны условно; стрелками показано направление прохождения
радиоимпульса
12
образователи, преобразующие энергию переменного электрического
тока в акустическую волну.
Преобразователи объемных волн представляют собой тонкий слой
пьезоэлектрического материала (окиси цинка ZnO или нитрида алю'
миния AlN) толщиной, равной примерно половине длины акустичес'
кой волны, на центральной частоте устройства. Пьезоэлектрический
слой расположен между тонкими металлическими электродами, тол'
щина которых много меньше длины акустической волны. Преобра'
зователи плотно прижаты к торцу звукопровода, являющегося вол'
новедущей средой, в которой осуществляется задержка сигнала
(рис. 1.7).
Величина реализуемых задержек в СВЧ'линиях задержки, рабо'
тающих на частотах от ~1 ГГц до ~12 ГГц, составляет от долей до
десятков микросекунд, при вносимых потерях от ~15дБ до ~70дБ. В
качестве материала звукопровода чаще всего используются искусст'
венный сапфир (лейкосапфир) и алюмоиттриевый гранат (АИГ). Оба
эти материала не обладают пьезосвойствами, однако имеют низкие
потери гиперзвука на высоких частотах. В лейкосапфире обычно ис'
пользуется продольная объемная волна, имеющая скорость
~11,2 км / с и потери на частоте 9,4 ГГц ~ 18 дБ / мкс, а в АИГ –
поперечная объемная волна, имеющая скорость ~5 км / с и потери на
частоте 9,4 ГГц ~ 8 дБ / мкс.
Линии задержки на объемных акустических волнах СВЧ'диапа'
зона используются в устройствах калибровки РЛС по дальности
(в качестве имитатора цели) и устройствах контроля выходной мощ'
ности передатчика.
t = L / VОАВ
з
Преобразователь Преобразователь
(ZnO)
(ZnO)
ОАВ
Вход
Выход
Сапфир, АИГ
Электроды
Рис. 1.7. Линия задержки на объемных акустических волнах
13
1.2. Полосовые фильтры на ПАВ
В настоящее время разработано и используется в радиоэлектрон'
ной аппаратуре большое количество фильтров различных типов на
ПАВ. Условно все многообразие фильтров на ПАВ можно разделить
на трансверсальные и резонансные. Резонансные фильтры на ПАВ,
в свою очередь, можно разделить на фильтры со слабой акустичес!
кой связью и импедансные фильтры.
Отличительной особенностью трансверсальных фильтров на ПАВ
является то, что их АЧХ определяется видом аподизации электро'
дов ВШП (рис. 1.8). Это первый из нашедших практическое приме'
нение типов фильтров.
Основные параметры резонансных фильтров на ПАВ определяют'
ся степенью связи и количеством возбуждаемых в структуре фильтра
типов колебаний. Причем связь между резонаторами, входящими в
фильтр, может быть как электрическая, так и акустическая. Это очень
широко используемый в настоящее время в устройствах связи, в том
числе мобильной, тип фильтров. Резонансные фильтры используют'
ся в тех случаях, когда требуется узкая полоса рабочих частот
(до ~5%) и небольшие потери (до ~5дБ).
Импедансные фильтры на ПАВ строятся на основе принципов,
аналогичных принципам построения лестничных фильтров на осно'
ве LC'элементов (сосредоточенных индуктивностей и емкостей) или
резонаторов на объемных акустических волнах. Частотная характе'
ристика таких фильтров определяется импедансом отдельных резо'
наторов на ПАВ (или отдельных ВШП), образующих фильтр и свя'
занных между собой электрически.
ВШП (А)
ВШП (В)
2p
ПАВ
Вход
Выход
Рис. 1.8. Конструкция трансверсального фильтра,
электроды одного из ВШП которого аподизованы
14
Основными параметрами фильтров являются следующие:
– центральная частота;
– полоса рабочих частот;
– неравномерность АЧХ в полосе рабочих частот;
– уровень внеполосного подавления;
– коэффициент прямоугольности;
– вносимые потери.
Определение центральной частоты, полосы рабочих частот и вно'
симых потерь аналогичны определениям параметров ЛЗ, приведен'
ным в разд. 1.1.
Неравномерность АЧХ (или модуля коэффициента передачи)
фильтра есть разница между максимальным и минимальным значе'
ниями модуля коэффициента передачи, выраженного в децибелах, в
заданном диапазоне полосы рабочих частот.
Коэффициент прямоугольности есть отношение полосы частот
по уровню –30дБ к полосе частот по уровню –3дБ. Верхний и нижний
уровни измерения полосы частот могут быть другими (обычно они
оговариваются), например –40 дБ и –1 дБ, соответственно.
В некоторых случаях задаются требования и к другим параметрам
фильтра, например к коэффициенту стоячей волны по напряжению
на входе и выходе фильтра, к неравномерности группового времени
задержки сигнала в полосе рабочих частот и т.д.
∆ f =7,6 МГц
.
K (ω) – A 0 , дБ
3
–3 дБ
1
–5
2
–10
–15
∆ f =9,2 МГц
3
–20
–25
–30
80 МГц
100 МГц
120 МГц
Рис. 1.9. Нормированный модуль коэффициента передачи фильтра с
неаподизованными преобразователями (кривая 1) и фильтра, электроA
ды одного из преобразователей которого аподизованы по функции
Тейлора (кривая 2) (NА= 25 – число электродов в первом преобразоваA
теле; NВ = 5 – число электродов во втором преобразователе; A0–
модуль коэффициента передачи на центральной частоте)
15
ВШП (B)
ВШП (A)
ПАВ
Вход
2p
Выход
Рис. 1. 10. Конструкция фильтра с одним аподизованным ВШП(А)
по закону sinc(x), n = 3
Как наиболее показательный, с точки зрения происходящих в
фильтрах на ПАВ физических процессов, рассмотрим один из транс'
версальных фильтров – фильтр с аподизацией апертуры электродов
ВШП.
Простейший трансверсальный фильтр на ПАВ по конструкции
полностью аналогичен линии задержки, приведенной на рис. 1.3,
поэтому ЛЗ на ПАВ может одновременно выполнять функции поло'
сового фильтра. АЧХ фильтра с однородными (неаподизованными)
ВШП приведена на рис. 1.9 (кривая 1). Простейший фильтр имеет
небольшое внеполосное подавление ~ 13 дБ и форму вершины, дале'
кую от идеальной, т. е. плоской.
Улучшить внеполосное подавление фильтра позволяет использо'
вание аподизации электродов ВШП (см. рис. 1.8). Соответствующее
сравнение частотных характеристик фильтров, использующих апо'
дизованный ВШП (кривая 2) и неаподизованные ВШП (кривая 1)
проведено на рис. 1.9
Значительно улучшить прямоугольность и неравномерность вер'
шины частотной характеристики трансверсальных фильтров на ПАВ
позволяет использование аподизации электродов ВШП в виде функ'
ции sinc(x) = sin(x) / x. Эта функция имеет бесконечное число боко'
вых лепестков ( n → ∞ ). Теоретически прямоугольность АЧХ фильт'
ра с ограниченным значением n улучшается по мере увеличения n.
Однако на практике из'за различного рода паразитных эффектов чис'
ло используемых в ВШП лепестков функции sinc(x) ограничено зна'
чением n = 20.
16
.
3
0
–10
–20
–30
30
–40
–50
–60
80 МГц
100 МГц
120 МГц
Рис. 1.11. Нормированный модуль коэффициента передачи фильтра с
аподизованным ВШП(А) по закону sinc(x) при n = 3 в сопоставлении с
коэффициентом передачи фильтра с неаподизованным ВШП (показан
тонкой линией) (A0 – модуль коэффициента передачи на центральной
частоте)
На рис. 1.10 условно показана конструкция фильтра, электроды
одного из преобразователей которого аподизованы по функции sinc(x)
при n = 3, а на рис. 1.11 показан вид АЧХ такого фильтра. Из сопос'
тавления рис. 1.9 и рис. 1.11 видно, что аподизация электродов ВШП
позволяет существенно улучшить прямоугольность АЧХ, даже при
n = 3.
1.3. Резонаторы на ПАВ
Одновходовый резонатор. Резонаторы на ПАВ широко использу'
ются в высокостабильных генераторах, полосовых фильтрах и дат'
чиках физических величин. Конструкция одновходового резонатора
на ПАВ приведена на рис. 1.12. Она включает встречно'штыревой
преобразователь, расположенный на поверхности пьезоэлектричес'
кой среды, справа и слева от которого расположены отражательные
структуры. Основным пьезоэлектрическим материалом для резона'
торов на ПАВ служат высокостабильные срезы кварца. Однако при
использовании резонаторов в составе фильтров на ПАВ используют'
ся также и другие пьезоэлектрические материалы, например ниобат
и танталат лития.
17
ВШП
2p
ОС
ОС
Вход (Выход)
Рис. 1.12. Топология одновходового резонатора
Благодаря синфазности парциальных поверхностных волн, воз'
бужденных ВШП и отраженных отражательными структурами, в
подложке под структурой образуется стоячая волна с периодом, рав'
ным удвоенному периоду отражательной структуры (ОС). Условия
фазового синхронизма для отраженных волн выполняются только в
узкой полосе частот вблизи f0 ≈ VПАВ /(2 p) . В этой же полосе частот
происходит резкое изменение входной проводимости резонатора и, как
следствие, параметра S11(ω) матрицы рассеяния устройства (рис. 1.13).
Коэффициенты матрицы рассеяния являются комплексными ве'
личинами и широко используются для описания свойств пассивных
многополюсников. Параметр S11(ω) имеет смысл коэффициента от'
ражения падающей высокочастотной волны напряжения от нагруз'
ки, которой является резонатор. При идеальном согласовании отра'
S max = – 0,3дБ
S11 ,
11
– 2 дБ
– 4 дБ
– 6 дБ
– 8 дБ
–10 дБ
–12 дБ
99,8 MHz
100,0 MHz
100,2 MHz
ω) одновходового резонатора
Рис. 1.13. Модуль S11(ω
18
женная волна отсутствует, и вся подводимая электрическая мощ'
ность поглощается в резонаторе. В этом случае в относительных еди'
ницах S11 = 0 (в децибелах S11 → −∞ ).
Одновходовые резонаторы на ПАВ широко используются в каче'
стве датчиков, например давления или крутящего момента. Кроме
того, одновходовые резонаторы на ПАВ используются в высокоста'
бильных генераторах диапазона частот от 100 МГц до 1 ГГц. Еще
одно важное применение одновходовых резонаторов состоит в том,
что они являются основным элементом импедансных фильтров на
ПАВ с малыми потерями, используемых, в том числе, в мобильных
телефонах.
Двухвходовый резонатор. Конструкция двухвходового резонато'
ра на ПАВ приведена на рис. 1.14. Двухвходовой резонатор включа'
ет два встречно'штыревых преобразователя, расположенных на по'
верхности звукопровода в одном акустическом канале. Справа и сле'
ва от преобразователей расположены отражательные структуры.
Период следования электродов в ВШП и ОС, расстояние между дву'
мя ВШП, а также расстояние между ВШП и ОС выбираются так, что
возбуждаемые преобразователями и отраженные ОС парциальные
поверхностные акустические волны были синфазны.
Амплитудно'частотная характеристика двухвходового резонато'
ра имеет вид, подобный АЧХ узкополосного фильтра (рис. 1.15). Важ'
ной характеристикой резонатора является его добротность, которую
можно оценить по приближенному соотношению
Q ≈ f0 / ∆f3 ,
где ∆f3 – полоса частот резонатора по уровню –3 дБ.
(1.9)
ВШП
ВШП
ОС
ОС
Вход
Выход
Рис. 1.14. Топология двухвходового резонатора на ПАВ
19
S21 max = –8 дБ
S21 ,
Q =10610
дБ
–10
–20
–30
–40
–50
–60
753
756
Частота, МГц
759
Рис. 1.15. Частотная характеристика
двухвходового резонатора на ПАВ
В случае использования резонатора в составе генератора доброт'
ность определяет такие важные характеристики генератора, как спек'
тральную плотность фазовых шумов и стабильность частоты коле'
баний. Резонаторы на ПАВ широко используются для создания вы'
сокостабильных генераторов диапазона частот до 2,5 ГГц.
1.4. Устройства формирования и сжатия
сложных сигналов на ПАВ
Для увеличения дальности действия и разрешения по дальности
РЛС широко используются сложные сигналы. Важной характерис'
тикой сложных радиосигналов является произведение ширины спек'
тра сигнала ∆f на его длительность T, называемое базой сигна'
ла B = ∆f T . Наибольшее распространение в радиолокационных сис'
темах получили сложные сигналы с линейной частотной модуляци'
ей (ЛЧМ) и фазокодоманипулированные (ФКМ) сигналы. Благодаря
высокой точности реализуемых параметров сигналов, формирование
и сжатие ЛЧМ'сигналов на основе устройств на ПАВ является наи'
более предпочтительным для систем с высоким разрешением. Диапа'
зон рабочих частот дисперсионных устройств на ПАВ составляет от
10 МГц до ~ 1,5 ГГц. Цифровые методы формирования ЛЧМ'сигнала
в настоящее время могут конкурировать с устройствами на ПАВ толь'
ко до частот ~300 МГц.
Для формирования и сжатия ЛЧМ'сигналов используются дис'
персионные акустоэлектронные линии задержки (ДАЛЗ), а для фор'
мирования и сжатия ФКМ'сигналов используются многоотводные
линии задержки (МЛЗ).
Дисперсионные линии задержки. На рис. 1.16, а условно показа'
на конструкция ДАЛЗ на ПАВ. Она включает входной преобразова'
20
тель ВШП (А) и выходной преобразователь ВШП (В). Преобразова'
тели обычно выполняются из тонкой металлической пленки, тол'
щиной 0,1…0,3 мкм, изготовленные методами электронно'лучевого
испарения металла в вакууме и фотолитографии. Структура форми'
руется на поверхности пьезоэлектрика, например ниобата лития или
кварца. Возбуждение ПАВ осуществляется электродами ВШП. Каж'
дая пара электродов возбуждает акустический волновой пакет с цен'
тральной частотой, равной частоте синхронизма n'й пары электро'
дов fn, определяемой как
fn =
VПАВ
,
2 pn
(1.11)
где pn – полупериод n'й пары электродов (см. рис. 1.16, а). Период
следования электродов одного из ВШП меняется, линейно увеличи'
ваясь (или линейно уменьшаясь) с продольной координатой.
Задержка между моментом возбуждения колебания n'м электро'
дом ВШП (А) и появлением его на выходе ДАЛЗ после обратного пре'
образования в выходном преобразователе ВШП (B)
tn =
Ln
,
VПАВ
(1.12)
Ln – расстояние от n'го электрода до центра выходного преобразова'
теля. Время задержки сигнала в ДАЛЗ в зависимости от частоты сиг'
нала определяется законом изменения периода следования электро'
дов ВШП, при условии, что период меняется достаточно медленно
(рис. 1.16, б).
При подаче на вход ДАЛЗ (ДАЛЗ'Ф) короткого видеоимпульса
(рис. 1.16, в), или радиоимпульса с частотой высокочастотного за'
полнения, равной средней частоте ДАЛЗ'Ф, на выходе ДАЛЗ'Ф бу'
дет сформирован радиоимпульс, имеющий внутреннюю линейную
частотную модуляцию (рис. 1.16, г).
Подавая сформированный радиоимпульс (рис. 1.17, в) на вход
ДАЛЗ'С (рис. 1.17, а), имеющей обратный ДАЛЗ'Ф наклон диспер'
сионной характеристики (в данном случае отрицательный,
рис. 1.17, б), на выходе ДАЛЗ'С получим сигнал (рис. 1.17, г), дли'
тельность которого значительно меньше исходного (сжатый ЛЧМ'
сигнал) и по уровню 0,5 примерно равна
∆tсж ≈
1,5
,
fв − fн
(1.13)
где f н, fв – нижняя и верхняя частоты полосы рабочих частот
ДАЛЗ'Ф по уровню 0,5.
21
а) ВШП(А)
б)
ВШП(В)
p
н
Tв
ПАВ
Tн
pв
pn
fв
fн
tn
Вход
Выход
г)
в)
t
t
Рис. 1.16. ДАЛЗ для формирования ЛЧМAсигнала (10<B<500)
а)
ВШП(А)
ВШП(В)
pн
б)
Tн
ПАВ
Tв
pв
Вход
fн
Выход
г)
в)
t
fв
∆ t сж
t
T
Рис. 1.17. ДАЛЗ для сжатия ЛЧМAсигнала (10<B<500)
22
Вход
ВШП
fн
fв
ОС
ВШП
Выход
Рис. 1.18. ДАЛЗ для формирования и сжатия ЛЧМAсигнала с большой
базой (В>500)
Устройства, конструкция которых показана на рис. 1.16 и рис.
1.17, позволяют формировать и обрабатывать ЛЧМ'сигналы с базой
до ~500. Формирование и сжатие сигналов с большей базой сопро'
вождается значительными искажениями закона модуляции и амп'
литуды различных спектральных составляющих. Для формирова'
ния и сжатия более длинных и широкополосных сигналов с базой до
10000 используются ДАЛЗ с ОС в виде канавок, изготовленных ион'
но'химическим травлением на поверхности пьезоэлектрика. Конст'
рукция ДАЛЗ с ОС приведена на рис. 1.18.
Принцип работы ДАЛЗ с ОС подобен принципу работы ДАЛЗ на
ВШП. Волны с различными частотами отражаются в той части ОС,
где их частоты близки к частоте синхронизма соседних канавок.
Выбирая определенный закон изменения периода ОС, можно полу'
чить требуемую частотную зависимость задержки различных спект'
ральных составляющих входного короткого радиоимпульса.
23
Глава 2
АКУСТИЧЕСКИЕ ВОЛНЫ В УПРУГИХ ТВЕРДЫХ ТЕЛАХ
Основными физическими процессами, определяющими характе'
ристики устройств на ПАВ, являются процессы возбуждения и при'
ема ПАВ преобразователями, а также распространения ПАВ в упру'
гой среде и отражения от поверхностных неоднородностей. Кроме
того, в некоторых случаях необходимо принимать во внимание диф'
ракционные эффекты, возникающие при распространении ПАВ, а
также паразитные отражения ПАВ в электродной структуре преоб'
разователя и ряд других, определяемых обычно как эффекты второго
порядка. Важными вопросами при создании устройств на ПАВ явля'
ются вопросы о возможности существования выбранного типа вол'
ны в упругой среде и возможности эффективного ее возбуждения. Во'
первых, волновой процесс должен поддерживаться упругой средой и
иметь малое пространственное затухание, и, во'вторых, данный тип
волны должен возбуждаться с небольшими потерями подводимой к
преобразователю мощности. В этой главе будет рассмотрен вопрос о
том, какие типы акустических волн могут существовать в упругой
среде, как обладающей пьезоэлектрическими свойствами, так и не
обладающей таковыми. Также пойдет речь о внутренней структуре
различных типов акустических волн, их основных свойствах и при'
менении.
2.1. Основные определения
При решении задачи по нахождению возможных типов волн в уп'
ругой среде обычно предполагается, что твердое тело однородно, сме'
щения частиц среды невелики, и их можно считать пропорциональ'
ными приложенным силам.
Для описания акустических волн в кристаллах обычно использу'
ется ряд физических величин. Так, действующие в объеме1анизот'
ропного тела силы описываются
через упругие напряжения T , а сме'
1
щения – через деформации S .
Смещения. Пусть некоторый объем тела находится в положении
равновесия, и некоторая частица материала расположена в точке с
24
координатами x1′ , x2′ , x3′ (рис. 2.1). При внешнем воздействии в объе'
ме материала происходят смещения. Каждая частица внутри объема
материала, испытывая внешнее воздействие, перемещается. Вели'
чина смещения зависит от координат и направления, т. е. величина
1
смещения u(x1, x2 , x3 ) – векторная величина и характеризует откло'
нение частиц тела от исходного положения.
Тензор деформаций. Величина деформации в каждой точке твер'
дого тела определяется как
Sij (x1 , x,2 x3 ) = 0,5(
∂ui ∂uj
), где i, j = 1, 2, 3.
+
∂xj ∂xi
(2.1)
Такое определение деформации дает нулевые значения деформа'
ций при движении тела как единого целого и при его вращении.
Тензор деформаций является симметричным тензором, т. е.
Sij = Sji .
(2.2)
Продольная волна. Пусть u1 = A exp[ikx1 − iωt] , u2 = u3 = 0 , тог'
да S11 = iku1 , остальные компоненты тензора деформаций равны нулю.
Поперечная волна. Пусть u2 = A exp[ikx1 − iωt] , u1 = u3 = 0 , тог'
да S12 = S21 = 0,5iku2 , остальные компоненты тензора деформаций
равны нулю.
X3
S
FX1
Т11
X3
S
FX2
Т21
FX3
FX1
S
FX2
FX3
Т31
S
X2
0
F
X1 X1
X2
1
Рис. 2.1. К определению тензора напряжений T
(S – поверхность единичной площади)
25
Тензор механических напряжений. Внутренние силы в объеме и
на поверхности твердого тела, воз'
S
никающие при его деформациях,
X
3
S
описываются тензором механичес'
Т
j3
1
ких напряжений T (см. рис. 2.1).
Компонент Tij (x1, x2 , x3 ) равен
проекции силы на направление
Тj 1
оси xi , действующей на площадку
Т
j2
X2
единичной площади, расположен'
ной в окрестности точки с коорди'
натами x1′ , x2′ , x3′ , нормаль к кото'
S
X1
рой совпадает с направлением
оси xj , причем i, j = 1, 2, 3.
Рис. 2.2. Компоненты тензора
1
Тензор механических напряже'
напряжений T
ний является симметричным тен'
зором, т. е.
Tij = Tji .
(2.3)
2.2. Основные уравнения для пьезоэлектрических
(анизотропных) материалов
Обобщение закона Гука для изотропного идеально упругого тела.
Расчет волновых процессов в упругих изотропных и анизотропных
телах опирается на соотношения, связывающие величину напряже'
ний и деформаций.
Закон Гука связывает напряжения и деформации в одномерном
случае. Обобщением закона Гука на случай анизотропного идеально
упругого тела является соотношение
Tij = ∑∑ cijkl Skl ; i, j,k,l = 1, 2, 3,
k
(2.4)
l
где cijkl – компоненты тензора (четвертого ранга) упругих модулей
(постоянных), который в общем случае содержит 81 элемент. В силу
симметрии (2.2) и (2.3) независимыми являются только 36 компо'
нентов. Кроме того, в силу законов термодинамики вторую пару ин'
дексов можно менять с первой, т. е. cklij = cijkl , что уменьшает число
независимых компонентов до 21. С учетом симметрии кристалла чис'
1
ло независимых компонентов c может быть еще более уменьшено.
Например, кристаллический материал кубической симметрии имеет
1
тензор c лишь с тремя независимыми компонентами.
Для упрощения записи часто вводят обозначения для первой и
второй пар индексов такие, что индекс 11 соответствует 1; 22–2;
33–3; 23 и 32–4; 13 и 31–5; 12 и 21–6.
26
Уравнение движения в анизотропной среде. Если механические
напряжения и деформации зависят от времени и координат, то урав'
нения (2.4) необходимо дополнить законами Ньютона, что позволя'
ет получить уравнение движения.
Используя второй закон Ньютона и определение механического
напряжения, можно получить уравнение движения в виде
ρ
∂2ui
∂t
2
=∑
j
∂Tij
∂xj
; i, j = 1, 2, 3.
(2.5)
где ρ – плотность материала.
Уравнение движения устанавливает связь механических напря!
жений, возникающих в результате действия сил, распределенных в
объеме идеально упругого твердого тела, с изменяющимися во вре!
мени деформациями, которые вызваны этими силами.
Наличие пьезоэффекта в твердых телах характеризуется тем фак'
том, что упругие деформации и механические напряжения1оказыва'
ются связанными с напряженностью
1 электрического поля E или век'
тором электрического смещения D .
Данное явление присуще только анизотропным материалам, внут'
ренняя структура которых характеризуется отсутствием центра сим'
метрии.
Поскольку упругие волны распространяются гораздо медленнее элек'
тромагнитных волн, то для их описания справедливо квазистатическое
приближение и допустимо использовать понятие потенциала
Ei = −
∂Φ
.
∂xi
(2.6)
Материальные соотношения для пьезоэлектриков. В каждой
точке однородного1диэлектрика, обладающего пьезосвойствами,
ком'
1
поненты тензора T и вектора электрического
смещения
зависят
D
1
не только от компонентов
тензора S , но и от напряженности элект'
1
рического поля E :
E
Tij = ∑∑ cijkl
Skl − ∑ ekij Ek ; i, j,k,l = 1, 2, 3,
(2.7)
Di = ∑ εijS Ej + ∑∑ ekij Sjk ; i, j,k,l = 1, 2, 3,
(2.8)
k
j
l
k
j
k
E
где cijkl
– определены при постоянной напряженности электрическо'
го поля, а εijS – компоненты тензора диэлектрических модулей (по'
стоянных) определены при постоянной величине деформаций; ekij –
компоненты тензора пьезоэлектрических модулей (постоянных).
27
Первое слагаемое в (2.7) соответствует закону Гука, обобщенному
на случай анизотропной среды. Второе слагаемое в (2.7) учитывает
изменение T̂ за счет прямого пьезоэффекта, если таковой имеет мес'
то; в противном случае это слагаемое1отсутствует.
Первое слагаемое
1
в (2.8) соответствует связи векторов D и E для обычного анизотроп'
ного кристалла, не обладающего
1 пьезосвойствами. Второе слагаемое
в (2.8) учитывает изменение D за счет обратного пьезоэффекта, если
таковой имеет место; в противном случае это слагаемое отсутствует.
Подставляя (2.6) в (2.7) и далее (2.7) в уравнение движения (2.5),
получим
2
⎡
⎤
∂2 Φ
E ∂ uk
=
+
e
c
⎢
⎥, где i, j,k,l = 1,2,3. (2.9)
∑∑
∑
kij
ijkl
2
∂xj ∂xk
∂xj ∂xl ⎥⎦
∂t
j k ⎢
l
⎣
Уравнение (2.9) является уравнением движения в пьезоэлектри'
ческой среде. Оно определяет возможные волновые процессы в ани'
зотропной среде с заданными свойствами, т. е. величинами ekij , cijkl .
Полагая, что диэлектрик не содержит свободных зарядов или
1
divD = 0 , с учетом (2.8), получим
ρ
∂2ui
⎡ S ∂2 Φ
∂ 2 uj ⎤
(2.10)
∑∑ ⎢⎢εij ∂x ∂x − ∑ eijk ∂x ∂x ⎥⎥, где i, j,k = 1, 2, 3.
i
j
i
k⎦
i j ⎣
i
Соотношения (2.9) и (2.10) образуют систему четырех уравнений,
1
связывающих три проекции u и потенциал Φ , и при условии зада'
ния соответствующих начальных и граничных условий полностью
определяют возможные волновые процессы (колебания) в объеме иде'
ально упругого анизотропного твердого тела, обладающего
пьезосвойствами.
2.3. Акустические волны в изотропных материалах
Рассмотрим наиболее простой случай изотропного материала.
К изотропным материалам относится, например, плавленный кварц.
Его акустические свойства во многом схожи со свойствами кристал'
лического кварца, используемого в устройствах на ПАВ. Кроме того,
в некоторых случаях бывает допустимо при анализе, например про'
цесса рассеяния ПАВ на поверхностных неоднородностях, пренеб'
речь анизотропией свойств материала.
Тензор упругости изотропного материала cijkl имеет только два
независимых компонента
cijkl = λδij δkl + µ(δik δ jl + δil δ jk ),
28
(2.11)
где δij – символ Кронекера, δij = 1 для i = j и δij = 0 для i ≠ j , постоян'
ные λ и µ – константы Ламе. Из (2.11) следует, что c11 = c22 = c33 = λ + µ,
c12 = c13 = c23 = c21 = c31 = c32 = λ, c44 = c55 = c66 = µ = (c11– c12) / 2.
Недиагональные компоненты равны нулю.
Подставляя cijkl в (2.4) для механического напряжения в изот'
ропном материале, получим
Tij = λδij ∑
i
∂ui
+ 2µSij .
∂xi
(2.12)
Уравнение движения для изотропного материала имеет вид
ρ
∂2uj
∂t2
= ( λ + µ)
∂
∂xj
∂ 2uj
∂u
∑ ∂xi + µ∑ ∂x2 .
i
i
i
(2.13)
i
2.3.1. Плоские волны
в неограниченном изотропном упругом теле
В неограниченном изотропном материале, согласно уравнению
(2.13), могут распространяться плоские волны. Вектор смещения в
этом случае имеет вид
11
1 1
(2.14)
u = u0 exp[ j(ωt − kx)],
1
где u0 – постоянный вектор, не зависящий от координат и времени.
Подставляя (2.14) в (2.13) получим уравнение
11
12
ω2ρuj = (λ + µ)(ku0 )kj + µ k uj ; j = 1, 2, 3,
(2.15)
12
где k = k12 + k22 + k32 . В векторной форме (2.15) имеет вид
11 1
12 1
1
ω2ρu0 = (λ + µ)(ku0 )k + µ k u0 .
(2.16)
Векторному уравнению (2.16) удовлетворяют два типа решений –
два типа плоских волн. Рассмотрим их.
1 2
Поперечные волны. Волновой вектор в этом случае kt = ω2ρ / µ , а
фазовая скорость Vt = µ / ρ не зависит от частоты и, следовательно,
1
данная волна является бездисперсионной. Вектор смещения u0 мо'
жет иметь любое направление в плоскости волнового фронта, пер'
1
пендикулярного kt .
Продольные волны. Волновой вектор в этом случае
1 2
kl = ω2ρ /(λ + 2µ) , а фазовая скорость Vt = (λ + 2µ)/ ρ не зависит от
29
частоты и, следовательно, данная волна также является бездиспер'
1
1
сионной. Вектор смещения u0 параллелен или антипараллелен k .
Так как постоянные Ламе всегда положительны, то скорость про'
дольных волн всегда больше скорости поперечных волн. Например,
для плавленого кварца скорость поперечных волн равна 3760 м / с, а
скорость продольных волн равна 5960 м / с.
Смещения обычно невелики. В плавленом кварце поперечная (или
продольная) волна с частотой 10 МГц при плотности мощности
1 мВт / мм2 имеет максимальное смещение ~ 0,3 нм.
2.3.2. Рэлеевские волны в изотропном полупространстве
Рассмотрим изотропную среду, бесконечную вдоль осей x1 и х2 с
границей при х 3 = 0. Пусть материал занимает полупростран'
ство x3 < 0 , а при x3 > 0 – вакуум.
Будем искать решение уравнения движения (2.13) для волны, рас'
пространяющейся вдоль границы раздела в направлении оси х1. Вол'
новые фронты параллельны оси х2. Волны данного типа названы рэ)
леевскими по имени их первооткрывателя – лорда Рэлея.
Воспользуемся общим свойством векторных полей, согласно ко'
торому любую векторную функцию можно представить в виде суммы
вихревого и потенциального компонентов:
1 1 1
(2.17)
u = ul + ut ,
причем
1
1
1
ul = gradφ, ut = rotψ,
(2.18)
1
где φ и ψ – так называемые, скалярный и векторный потенциалы.
В результате подстановки (2.17) и (2.18) в (2.13) последнее урав'
нение сводится к двум независимым уравнениям:
ρ
∂2uli
∂t
2
ρ
− (λ + 2µ)∑
j
∂2uti
∂t2
− µ∑
j
∂2uli
∂xj2
∂2uti
∂xj2
= 0,
= 0.
(2.19)
(2.20)
Уравнение (2.19) описывает распространение продольных, а урав'
нение (2.20) – поперечных волн. Продольные волны безвихре'
1
вые rot(ul ) = 0 , а в поперечных отсутствует продольное сжатие и рас'
1
тяжение div(ut ) = 0 .
Для гармонической волны, у которой отсутствует зависимость от
координаты х2, уравнения (2.19), (2.20), с учетом (2.18), примут вид
30
∂2φ
∂x12
∂ 2 ψ2
∂x12
+
+
∂2 φ
∂x32
∂ 2 ψ2
∂x32
+ kl2 φ = 0,
(2.21)
+ kt2ψ2 = 0,
(2.22)
где kl2 = ω2ρ / µ , kt2 = ω2 (λ + 2µ)/ ρ .
Следует отметить, что у векторного потенциала есть только одна
компонента ψ2 , две другие отсутствуют.
Решение (2.21), (2.22) ищется в виде
φ(k, x1 , x3 ) = φ0 (k, x3 )exp( jkx1 − ωt),
(2.23)
ψ2 (k, x1, x3 ) = ψ 0 (k, x3 )exp( jkx1 − ωt).
(2.24)
Подставляя (2.23) и (2.24) в (2.21) и (2.22), получим два диффе'
ренциальных уравнения относительно φ0 (k, x3 ) и ψ 0 (k, x3 ) . Их линей'
но независимыми решениями будут функции
φ0 (k, x3 ) = A0 exp( −qx3 ),
(2.25)
ψ 0 (k, x3 ) = B0 exp(−sx3 ),
(2.26)
где q = ± k2 − kl2 ; s = ± k2 − kt2 ; А0, В0 – произвольные постоянные.
Имеющим физический смысл является решение с экспоненциально
убывающим с глубиной полем, т. е. решение с положительным зна'
чением корня. С учетом (2.25) и (2.26) решения (2.23) и (2.24) при'
нимают вид
φ(k, x1, x3 ) = A0 exp(−qx3 )exp( jkx1 − ωt),
(2.27)
ψ2 (k, x1, x3 ) = B0 exp(−sx3 )exp( jkx1 − ωt).
(2.28)
Следует подчеркнуть, что (2.27) и (2.28) описывают поверхност'
ные волны, амплитуда которых экспоненциально убывает с глуби'
ной. Теперь необходимо определить основные характеристики волн –
скорость распространения, характер изменения смещений и механи'
ческих напряжений по направлению х3. Для этого воспользуемся
граничными условиями для компонентов тензора напряжений. Ис'
пользуя закон Гука в виде (2.12), свойства введенных потенциалов
(2.18) и граничное условие Т33 = 0, Т13 = 0, а также учитывая реше'
ния для потенциалов (2.27) и (2.28), получим алгебраическую сис'
тему двух уравнений относительно постоянных А0 и В0:
[k
λ
λ
− q2 (1 + )] A + iksB = 0,
2µ
2µ
(2.29)
31
(2.30)
2ikqA + (k2 + s2 ) B = 0.
Условием существования нетривиального решения этой системы
является равенство нулю ее определителя. Это дает следующее ха'
рактеристическое уравнение для нахождения волнового числа:
(2.31)
4k2qs − (k2 + s2 )2 = 0.
Это уравнение называют уравнением Рэлея, его часто преобразо'
вывают в полиномную форму
(2.32)
η6 − 8η4 + 8(3 − 2ξ2 )η2 − 16(1 − ξ2 ) = 0,
где η = kt / k = V / Vt , ξ = kl / kt = Vt / Vl , Vl, Vt – фазовые скорости про'
дольных и поперечных волн соответственно. Уравнение (2.32) про'
изводное от (2.31) и поэтому может содержать лишние корни.
Уравнение (2.32) имеет шесть корней, значения которых зависят
от величины коэффициента Пуассона среды, определяемого как
σ=
Vl2 − 2Vt2
2(Vt2
− Vt2 )
=
λ
.
2(λ + µ)
(2.33)
Коэффициент Пуассона определяет отношение скоростей продоль'
ной и поперечной волн в изотропном теле. В реальных средах σ меня'
ется от 0 до 0,5.
Уравнение (2.31) имеет только один корень, являющийся одно'
временно и корнем уравнения (2.32) и соответствующий реальным
средам, т. е. σ <0,5. Приближенно
0,87 + 1,12σ
.
(2.34)
1+ σ
Согласно (2.34), при изменении σ от 0 до 0,5 фазовая скорость
рэлеевской волны меняется от 0,87 до 0,96 Vt, причем рэлеевская
волна не имеет дисперсии.
Зная фазовую скорость рэлеевской волны из системы уравнений
(2.29), (2.30) нетрудно получить значения постоянных и, таким об'
разом, значения потенциалов
ηR ≈
φ(k, x1, x3 ) = A0 exp(−qx3 )exp( jkR x1 − ωt),
ψ2 (k, x1, x3 ) = A0
2ikR q
kR2 + s2
exp(−sx3 )exp( jkR x1 − ωt).
(2.35)
(2.36)
Выражения (2.35) и (2.36) показывают, что рэлеевская волна со'
стоит из двух неоднородных волн – продольной и поперечной, кото'
рые распространяются вдоль границы полупространства с одинако'
выми скоростями и затухают с глубиной по законам
32
φ(k, x1, x3 ) ~ exp(− kR2 − kl2 x3 ), ψ2 (k, x1, x3 ) ~ exp(− kR2 − kt2 x3 ).
(2.37)
На границе x3 = 0 эти волны взаимно компенсируют создаваемые
ими напряжения. Компоненты смещений (ненулевые будут u1 и u3)
можно найти, подставляя (2.37) в (2.18). Компоненты напряжений
вычисляются с помощью закона Гука (2.12).
На рис. 2.3 показана картина нормированных амплитуд смеще'
ний u1 и u3 в рэлеевской волне. Амплитуды смещений нормированы
на амплитуду нормального смещения на поверхности u3(x3 = 0). На
рис. 2.4 показана зависимость нормированных амплитуд напряже'
ний T11 , T33 , T13 в рэлеевской волне от глубины. Амплитуды напря'
жений нормированы на амплитуду напряжения на поверхности
T11(x3 = 0). Из графиков видно, что смещение, нормальное к поверх'
ности u3 , сначала возрастает, а затем убывает с глубиной; смещение,
параллельное поверхности u1 , меняет знак на глубине ~ 0,2λ.
Кроме того, из графиков видно также, что T11 меняет знак, тогда
как T33, T13 достигают максимума приблизительно при 0,3λ R , а за'
тем экспоненциально убывают с глубиной.
Поскольку компоненты смещений u1 и u3 в рэлеевской волне сдви'
нуты по фазе на π / 2 [см. (2.35),(2.36)], траекториями движения
частиц в волне являются эллипсы. При распространении волны в
положительном направлении оси x1 при выбранной системе коорди'
нат вращение частиц по эллипсу у поверхности происходит против
часовой стрелки, а на глубине x3 > 0,2λ R направление вращения ме'
1,0
1
0,8
u3
0,6
2
u 3 (x 3= 0)
0,4
u1
0,2
x3 / λ R
u (x 3= 0)
3
0,0
–0,2
0,2
0,6
1,0
1,4
Рис. 2.3. Зависимость относительных амплитуд смещений от глубины в
рэлеевской волне для двух значений коэффициента Пуассона σ = 0,25
(1 – толстая линия) и 0,34 (2 – тонкая линия)
33
1,0
0,8
0,6
T13 (x3 )
1
T11 (x3= 0)
0,4
1
0,2
T33 (x3 )
0,0
T11(x3 = 0)
2
2
x3 /λ R
1
0,2
–0,2
T11(x3)
0,6
1,0
1,4
T11 (x3 = 0)
Рис. 2.4. Зависимость относительных амплитуд напряжений
от глубины в рэлеевской волне для двух значений коэффициента
Пуассона σ = 0,25 (1 – толстая линия) и 0,34 (2 – тонкая линия)
а)
б)
A
B
C
Смещения
Направление
распространения
в)
A
B
C
Длина волны
Направление
распространения
Смещения
Рис. 2.5. Характер смещений в упругих волнах, которые могут сущеA
ствовать в твердом теле: в рэлеевской волне (а); в объемной поперечной
волне (б); в объемной продольной волне (в)
34
няется на обратное. Большая полуось эллипсов перпендикулярна гра'
нице полупространства, малая – параллельна направлению распрос'
транения волны.
На рис. 2.5, а показана картина смещений в рэлеевской волне в
сопоставлении с картиной смещений в поперечной (рис. 2.5, б) и про'
дольной (рис. 2.5, в) объемных волнах. Точками обозначены части'
цы среды, которые в отсутствии волны расположены на равных рас'
стояниях одна от другой.
В заключение раздела отметим, что помимо рэлеевской волны в
изотропном полупространстве может существовать продольная
объемная волна, а также два типа сдвиговых объемных волн – одна
из них имеет вертикальную поляризацию (SV'типа), а другая гори'
зонтальную поляризацию (SH'типа). Скорости перечисленных аку'
стических волн в изотропном полупространстве всегда удовлетворя'
ют неравенству
VR < VSH < VSV < VL ,
(2.38)
где VR, VSH, VSV, VL – фазовые скорости рэлеевской волны, сдвиговой
волны SH'типа, сдвиговой волны SV'типа и продольной волны соот'
ветственно.
2.4. Волны в анизотропных средах
2.4.1. Плоские волны в неограниченной анизотропной среде
Решение уравнения движения (2.9) в неограниченной пьезоэлек'
трической среде ищется в виде плоских волн вида
11
2 1
(2.39)
u = u0 exp[ j(ωt − kx)],
11
(2.40)
Φ = Φ 0 exp[ j(ωt − kx)],
1
1
где k – волновой вектор; u0 ,Ф0 – постоянные коэффициенты, не за'
висящие от координат и времени.
Поверхность постоянной фазы у такой волны представляет собой
плоскость, поэтому и волна называется плоской.
Для нахождения решений выражения (2.39) и (2.40) подставим в
(2.9), (2.10), тогда получим четыре уравнения относительно четы'
1
рех неизвестных – трех проекций вектора u0 и Ф0. Приравнивая нулю
определитель, составленный из коэффициентов полученных уравне'
ний, можно найти четыре решения. Одно из решений соответствует
электростатическому решению для непьезоэлектрических материа'
лов, для которых eijk = 0, но это решение не представляет интереса.
Другие три решения описывают бездисперсионные акустические вол'
1
1
ны. Обычно одно решение имеет смещения u почти параллельные k
35
и называется квазипродольной или продольной волной. Для некото'
1
рых направлений в кристалле вектор u совпадает с направлением
распространения волны. Такую волну называют чистой продольной
1
волной. Другие два решения,
как правило, имеют смещения u почти
1
перпендикулярные k и называются квазипоперечными, поперечны!
ми или сдвиговыми волнами. Эти две волны имеют разные скорости.
1
Для некоторых направлений в кристалле вектор u строго перпенди'
кулярен направлению распространения волны. Такую волну назы'
вают чистой поперечной волной.
В силу анизотропии свойств кристалла фазовая скорость волн
V = ω / k зависит от направления распространения.
Следует отметить также, что все три волны в общем случае имеют
ненулевые электрические потенциалы, которые для некоторых на'
правлений в кристалле могут отсутствовать.
2.4.2. Волны в пьезоэлектрическом полупространстве
Исходными соотношениями задачи нахождения возможных ти'
пов волн, которые могут существовать в анизотропной среде с задан'
ными свойствами, являются уравнение движения (2.9) и уравнение
(2.10). Эти уравнения необходимо дополнить граничными условия'
ми (ГУ), поскольку в данном случае имеется граница раздела двух сред.
Граничные условия бывают механические и электрические.
Механические ГУ предполагают равенство нулю нормальных ком'
понентов тензора механических напряжений
T13 = T23 = T33 = 0 при x3 = 0.
(2.41)
Электрические ГУ включают, по крайней мере, два типа.
1. Пространство выше пьезоэлектрика – вакуум. Проводники и
свободные заряды отсутствуют. Такую поверхность называют сво!
бодной.
Потенциал при переходе через границу раздела сред непрерывен,
как и нормальные компоненты вектора электрического смещения:
Dx3 (x3 = +0) = Dx3 (x3 = −0) = ε0 β Φ .
(2.42)
2. Поверхность покрыта тонким слоем металла с бесконечной про'
водимостью, но не оказывающей механической нагрузки. Это элект!
рически «закороченная» поверхность.
Наличие металла на поверхности предполагает равенство нулю
тангенциальной составляющей электрического поля в направлени'
ях, где нет электрического тока:
Ex1 (x3 = 0) = 0.
36
(2.43)
В случае наличия на металле свободных зарядов нормальная ком'
понента вектора электрического смещения претерпевает разрыв, рав'
ный поверхностной плотности заряда:
Dx3 (x3 = +0) − Dx3 (x3 = −0) = σ.
(2.44)
Решение уравнений (2.9), (2.10) для парциальных поверхност'
ных акустических волн ищется в виде
1
2
u/ = u0/ exp( jγx3 )exp[ j(ωt − βx1 )],
(2.45)
Φ / = Φ /0 exp( jγx3 )exp[ j(ωt − β x1 )],
(2.46)
γ
β
где – постоянная затухания в направлении оси x3; – постоянная
распространения (волновое число) в направлении оси x1.
В общем случае решение задачи возможно только численными
методами. При этом процедура решения следующая.
1. Фиксируется некоторое значение β .
2. Это значение β подставляется в (2.45), (2.46).
3. Выражения (2.45), (2.46) подставляем в (2.9), (2.10).
4. Решая их численно (они будут алгебраическими), находим во'
семь решений для γ , каждому из которых соответствуют относитель'
1
ные значения u0/ и Φ/0 [см. (2.45) и (2.46)]. Значения γ обычно комп'
лексные и из них необходимо отобрать такие, мнимая часть которых
отрицательна, так, чтобы потенциал и смещения, при x3 → −∞ стре'
мились к нулю. Т. е. необходимо отобрать решения, имеющие физи'
ческий смысл.
В общем случае имеется четыре таких значения γ1, γ 2 , γ 3 , γ 4 и пар'
циальные волны описываются функциями
2/ 1/
um
= u0m exp( jγ m x3 )exp[ j(ωt − βx1 )],
(2.47)
Φ/m = Φ 0/ m exp( j γ m x3 )exp[ j(ωt − β x1 )],
(2.48)
где m = 1, 2, 3, 4.
Общее решение есть сумма парциальных волн:
1
u=
Φ=
4
1
∑ Amum/ ;
(2.49)
∑ AmΦm/ .
(2.50)
m =1
4
m =1
Am могут быть определены, используя
Относительные значения
механические ГУ (2.41) и электрические ГУ (2.42) – (2.44).
Получающийся в результате определитель приравниваем нулю и
из его решения получаем относительные значения коэффициентов Am .
37
Однако определитель обращается в ноль лишь при определенных
значениях β . Для их нахождения необходима итерационная проце'
дура. При этом скорость волны равна ω/ β .
2.4.3. Типы волн в анизотропных однородных средах
Решения вида объемных акустических волн. В пьезоэлектри'
ческом полупространстве могут существовать решения уравнений
(2.9), (2.10) типа объемных акустических волн (см. табл. 2.1).
SSBW – приповерхностная волна, разновидность SH'типа ОАВ
(сдвиговой объемной волны с горизонтальной поляризацией), рас'
пространяющаяся почти параллельно поверхности и сочетающая
свойства ПАВ и ОАВ, благодаря чему используется в датчиках сен'
сорного типа.
Решения вида поверхностных акустических волн. Характер ре'
шений уравнения движения зависит от свойств кристалла, выбран'
ного направления распространения и условий на поверхности. В об'
щем случае решение данной задачи является достаточно сложным
ввиду разнообразии классов симметрии кристаллов. Однако всегда
можно найти одно или несколько решений вида поверхностных аку'
стических волн. Такое решение может содержать все три проекции
вектора смещения, так что траектория движения частиц не всегда
расположена в сагиттальной плоскости, что характерно для волны
рэлеевского типа.
Сагиттальная плоскость – плоскость, образованная направле'
нием распространения волны и нормалью к поверхности тела.
Для некоторых ориентаций в кристалле решение не содержит свя'
занного электрического поля. Такую волну называют непьезоактив'
ной. При этом металлизация поверхности не оказывает влияния на
распределение поля.
1
Чаще всего рассматривают решение, для которого смещение u
ориентировано параллельно или почти параллельно сагиттальной
плоскости. Это решение содержит связанное электрическое поле и
называется пьезоактивной рэлеевской волной. Данная волна сходна
с релеевской волной в изотропном материале, однако ее свойства не'
сколько отличаются из'за анизотропии и пьезоэффекта. Глубина про'
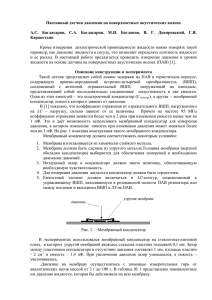
никновения обычно порядка длины волны. На рис. 2.6 показаны за'
висимости скоростей в Y'срезе ниобата лития от направления рас'
пространения.
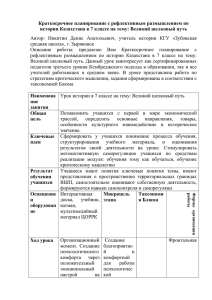
Следует обратить внимание на то, что Vm < V0 , это всегда справед'
ливо для любых пьезоактивных волн. Разница скоростей Vm − V0 ха'
рактеризует электромеханическую связь с поверхностной неоднород'
38
VR , M/C
X
Y
ПАВ
3800
θ
3600
Z
1
2
3400
–80 –60 –40 –20
0
20
40
60
80
θ , градус
Рис. 2.6. Фазовая скорость распространения рэлеевской волны в
ниобате лития YAсреза: 1 – скорость на свободной поверхности; 2 –
скорость на металлизированной поверхности; θ – угол между направлеA
нием распространения и осью Z
ностью. Наибольшая связь имеет место для направления, совпадаю'
щего с осью Z . Подобная ориентация ниобата лития часто исполь'
зуется в устройствах на ПАВ.
При некоторых ориентациях пьезоактивная рэлеевская волна
может иметь смещения, расположенные только в сагиттальной плос'
кости. Для этого сагиттальная плоскость должна являться плоско'
стью зеркальной симметрии кристалла. Такая волна называется чи!
стой модой, а направление ее распространения направлением чис!
той моды. При любой заданной ориентации поверхности кристалла
зависимость скорости волны от направления симметрична по отно'
шению к оси чистой моды. Для Y'среза ниобата лития направления
X и Z являются направлениями чистой моды. Следует отметить, что
не для всех направлений в кристалле, относительно которых зависи'
мость скорости симметрична, смещения происходят только в сагит'
тальной плоскости (т. е. обратное утверждение не всегда справедливо).
Новые свойства поверхностных волн, обусловленных анизотро'
пией, состоят в следующем.
1. Структура и свойства волны существенно зависят от направле'
ния распространения и симметрии кристалла.
2. В кристаллах возможно существование новых (по сравнению с
рэлеевской) типов поверхностных волн.
3. В общем случае поверхностная волна в кристалле имеет не две
(как в изотропном случае), а три компоненты вектора смещения и
является волной смешанной поляризации (вертикально'горизон'
тальной).
39
4. Уменьшение амплитуды с глубиной может проходить не по эк'
споненциальному закону, а по осциллирующей экспоненте (произве'
дение экспоненты на тригонометрическую функцию).
5. Характерной особенностью является несовпадение направле'
ния волнового вектора и вектора групповой скорости (направления
распространения волны или фазового фронта и направления потока
энергии).
6. В пьезоэлектрических кристаллах распространение поверхнос'
тных волн сопровождается квазистатическим электрическим потен'
циалом. Это позволяет возбуждать волны, создавая электрическое
поле в тонком поверхностном слое при помощи системы электродов,
нанесенных на поверхность.
Псевдоповерхностная волна. Фазовая скорость псевдоповерхно'
стной волны выше скорости медленной поперечной волны (в этом
состоит ее особенность [см. (2.38)], но меньше скорости быстрой по'
перечной волны. Смещения в этой волне экспоненциально убывают с
глубиной и она, по сути, является поверхностной. Волна имеет вер'
тикальную поляризацию (SV'типа). Псевдоповерхностная волна яв'
ляется пьезоактивной. Обычно она имеет утечку энергии (т. е. явля'
ется «вытекающей»), поскольку распространяется под небольшим
углом к поверхности и по мере распространения частично трансфор'
мируется в объемную волну. Практическое применение имеют срезы
кристаллов и такие направления в них, что «утечка» энергии волны
невелика (~0,01 дБ / λ).
Вытекающие ПАВ. Волна имеет потери, или «утечку» энергии,
даже в отсутствии потерь в среде распространения.
ПАВ SH'типа (STW) – волна преимущественно горизонтальной
поляризации и имеет ряд особенностей в сильных и слабых пьезоэ'
лектриках. Скорость ПАВ SH'типа меньше, чем у ОАВ SH'типа.
Уменьшение скорости волны зависит от того, насколько сильна пье'
зоэлектрическая связь. С уменьшением скорости энергия ПАВ SH'
типа имеет тенденцию концентрироваться близко к поверхности,
т. е. «утечка» волны уменьшается.
Сильный пьезоэлектрик (ниобат и танталат лития). В сильных
пьезоэлектриках ПАВ SH'типа эффективно возбуждается и распрос'
траняется с небольшим затуханием. Скорость ее выше, чем скорость
ПАВ рэлеевского типа, поэтому ПАВ SH'типа нашла применение в
высокочастотных резонаторах и фильтрах. Следует отметить, что в
сильном пьезоэлектрике SH'типа ОАВ, распространяющаяся вбли'
зи поверхности, быстро затухает по мере распространения.
Слабый пьезоэлектрик (кварц). Возбуждение ПАВ SH'типа мало'
эффективно, кроме того, для удержания ПАВ SH'типа вблизи повер'
40
хности используют направляющие системы в виде решетки электро'
дов. Область применения этого типа ПАВ та же, что и в случае силь'
ного пьезоэлектрика. Вместе с тем в слабых пьезоэлектриках SH'типа
ОАВ, распространяющаяся как SSBW близко к поверхности, имеет
небольшое затухание.
Волна Гуляева–Блюштейна. В этой пьезоактивной волне смеще'
ния перпендикулярны сагиттальной плоскости. Она имеет сходство
с плоской объемной волной SH'типа в изотропном полупространстве,
распространяющейся параллельно поверхности. Однако из'за пьезоэф'
фекта эта волна имеет связь с поверхностью и распространяется без
«утечки». Величина связи невелика. Так, даже в сильных пьезоэ'
лектриках, таких как сульфид кадмия, типичное значение глубины
проникновения составляет ~4λ для металлизированной поверхнос'
ти и ~44λ для неметаллизированной поверхности. Скорость ее близ'
ка к скорости медленных поперечных волн. Этот тип волны плохо
управляется с поверхности и поэтому используется редко.
Основные типы волн, которые могут существовать в упругих изот'
ропном и анизотропном полупространствах, приведены в табл. 2.1.
Выбор пьезоэлектрического материала для устройства на
ПАВ. Это важнейшая процедура в процессе проектирования устрой'
ства на ПАВ.
Таблица 2.1
Тип волны
ПАВ
ОАВ
В изотропном
полупространстве
В анизотропном
полупространстве
Рэлеевская
Рэлеевская (пьезоактивная)
Псевдоповерхностная (SV'
типа)
ПАВ SH'типа (STW)
Гуляева'Блюштейна (SH'
типа)
Продольная
Поперечная с вертика'
льной поляризацией
(SV'типа, быстрая)
Поперечная с горизон'
тальной поляризацией
(SH'типа, медленная)
Продольная
Поперечная c вертикальной
поляризацией (SV'типа,
быстрая)
Поперечная с горизонталь'
ной поляризацией (SH'типа,
медленная)
Поперечная приповерхност'
ная с горизонтальной
поляризацией (SSBW)
41
В расчет принимаются такие свойства пьезоэлектрических мате'
риалов, как:
– наличие направлений чистой моды с приемлемыми для практи'
ческого использования параметрами;
– величина коэффициента электромеханической связи, который
пропорционален разности скоростей на свободной и металлизирован'
ной поверхностях материала;
– величина скорости распространения ПАВ;
– температурная стабильность свойств материала;
– потери в материале на высоких частотах (для устройств СВЧ'
диапазона).
Более подробную информацию по данному вопросу можно найти в
учебном пособии О. Л. Балышевой. «Материалы для акустоэлект'
ронных устройств».
42
Глава 3
МЕТОДЫ РАСЧЕТА УСТРОЙСТВ НА ПАВ
Основными конструктивными элементами, на которых построено
большинство пассивных устройств на ПАВ, являются встречно'шты'
ревые преобразователи, отражательные структуры и многополоско'
вые ответвители. Для расчета частотных характеристик (решения
задачи анализа) или синтезирования топологии основных конструк'
тивных элементов упомянутых устройств по заданным частотным
характеристикам (решения задачи синтеза) необходимы эффектив'
ные методы расчета. Методы расчета должны адекватно описывать
процесс возбуждения, отражения и распространения ПАВ в структу'
ре ВШП, ОС и МПО. Перечисленные процессы, вообще говоря, необ'
ходимо дополнить процессом генерации объемных волн, имеющем
место при рассеянии ПАВ на неоднородностях. Следует отметить,
что это явление в устройствах на ПАВ имеет негативный характер. В
общем случае каждый из перечисленных выше процессов может иметь
место в устройствах на ПАВ. Вместе с тем в некоторых случаях ка'
кие'либо процессы могут отсутствовать. Так, например, если ОС вы'
полнена на канавках или выступах из диэлектрического материала,
то возбуждения ПАВ внешними источниками не происходит, хотя
возбуждение объемных волн при прохождении ПАВ через ОС имеет
место.
В данном разделе будут рассмотрены основные физические про'
цессы, имеющие место в устройствах на ПАВ и определяющие их ча'
стотные свойства. Результатом рассмотрения будут являться соот'
ветствующие методы расчета.
В настоящее время существует целый ряд практических методов
расчета устройств на ПАВ, позволяющих с различной степенью точ'
ности прогнозировать частотные характеристики устройств. Мы рас'
смотрим два из них. Первый метод расчета близок, по сути, к методу
«дельта' функций» и по уровню сложности является наиболее про'
стым. Однако этот метод пригоден для расчета далеко не всех типов
устройств на ПАВ и имеет ограниченную точность. Основной недо'
статок метода дельта'функций состоит в том, что он не учитывает
43
многократные переотражения ПАВ в структуре ВШП или ОС и, по'
этому совершенно непригоден для расчета резонансных типов филь'
тров и резонаторов. Второй метод расчета, рассмотренный далее, ос'
нован на уравнениях связанных волн и пригоден для расчета прак'
тически всех известных типов пассивных устройств на ПАВ и имеет
при этом хорошую точность.
3.1. Возбуждение ПАВ
Наиболее важным для создания устройств на ПАВ и сложным с
точки зрения адекватного физического описания является процесс
возбуждения ПАВ, основанный на явлении пьезоэффекта.
Явление пьезоэффекта было обнаружено в 80'х годах XIX века
французскими учеными Пьером и Жаком Кюри. В ходе исследований
они установили, что на поверхности кристаллов кварца при механи'
ческом воздействии появляются электрические заряды, причем ве'
личина заряда пропорциональна приложенному усилию. Явление
электрической поляризации, обусловленное механической деформа'
цией кристалла, получило название прямого пьезоэлектрического
эффекта. Затем было предсказано и экспериментально подтвержде'
но существование обратного пьезоэлектрического эффекта – по'
явление механической деформации в крислалле под воздействием
приложенного электрического поля.
Благодаря пьезоэффекту в пьезоэлектрических кристаллах рас'
пространение поверхностных акустических волн (волн деформаций)
сопровождается квазистатическим электрическим потенциалом. Это
позволяет возбуждать волны, создавая электрическое поле в тонком
поверхностном слое при помощи системы электродов, нанесенных
на поверхность.
Наибольшее распространение (благодаря высокой эффективнос'
ти) получила встречно'штыревая структура электродов. Современ'
ные методы расчета таких структур основаны на концепции эффек'
тивной диэлектрической проницаемости εэф (ω) , введенной в работах
Гриба с соавторами, и уравнениях связанных поверхностных акус'
тических волн. При этом все акустические свойства материала учи'
тываются частотно'зависимой величиной ε эф (ω) . Уравнения связан'
ных ПАВ позволяют учитывать при расчетах все существенные фи'
зические механизмы, влияющие на характеристики устройств на
ПАВ, такие как возбуждение, распространение, отражение и затуха'
ние волн и, таким образом, рассчитывать практически любые пас'
сивные устройства на ПАВ.
44
3.2. Функция Грина пьезоэлектрического полупространства
Рассмотрим задачу возбуждения ПАВ. Выберем обычно использу'
емую при решении задачи возбуждения ПАВ в пьезоэлектрических
кристаллах систему координат (рис. 3.1, а). Будем полагать, что воз'
буждение ПАВ осуществляется поверхностным распределением за'
ряда σ(z) или тока J (z) , заданных на электродах ВШП, выполнен'
ных из идеального металла, не создающих механической нагрузки и
расположенных в плоскости YZ, при х = 0 (рис. 3.1). Вид распределе'
ния заряда (тока) считаем произвольным, но известным. Длина элек'
тродов предполагается много большей длины поверхностной волны.
Будем также полагать, что источник сигнала вида U0 exp( − jωt) ,
где U0 – амплитуда, ω – круговая частота, подключен слева, поэто'
му J (z) = − jωσ(z) .
Используя уравнения Максвелла и уравнения движения для пье'
зоэлектрической среды (2.9) с соответствующими материальными
соотношениями для векторов электрического смещения и тензора ме'
ханического напряжения (2.7), (2.8), а также граничные условия на
поверхности пьезоэлектрического полупространства, можно пока'
зать, что поверхностный потенциал связан с плотностью поверхнос'
тного распределения заряда σ(z) соотношением
ϕ(x, z)
X =0
=
∞
∫ G(z − z0 )σ(z0 )dz0 ,
(3.1)
−∞
где G (z − z0 ) функция Грина пьезоэлектрического полупространства,
равная
G (z − z0 ) =
∞
exp[− j κ(z − z0 )]
1
dκ,
∫
2π −∞
κ εэф ( κ)
(3.2)
причем ε эф ( κ) – есть эффективная диэлектрическая проницаемость,
равная
ε эф ( κ) =
σ( κ)
,
κ ϕ( κ)
(3.3)
σ( κ) и ϕ( κ) – фурье'компоненты поверхностной плотности заряда на
электродах и поверхностного потенциала соответственно.
В общем случае эффективная диэлектрическая проницае'
мость εэф ( κ) является сложной функцией от κ и ее находят числен'
но. В качестве примера на рис. 3.2 приведена εэф ( κ) для YZ'среза ни'
обата лития. Функция ε эф ( κ) имеет нуль при κ = κ0 и полюс при
κ = κm . Согласно (3.3) нулевое значение ε эф ( κ) при κ = κ0 соответству'
45
ет случаю свободной поверхности без зарядов σ( κ) = 0 , а полюс
при κ = κm соответствует равенству нулю потенциала, что имеет мес'
то в случае металлизированной поверхности. Эти две особенности
подынтегрального выражения при вычислении функции Грина (3.2)
дают решение, соответствующее поверхностной волне. Сплошная ли'
ния – действительная часть ε эф ( κ) , пунктир – мнимая часть ε эф ( κ) .
При значениях κ < κb функция ε эф ( κ) становится комплексной, и
при вычислении (3.2) в этой области значений κ появляются реше'
ния, соответствующие возбуждению объемных акустических волн.
В соответствии с видом εэф ( κ) функция Грина пьезоэлектрическо'
го полупространства имеет вид
а)
X
I0
Z
Y
2
Rг
U0
ПАВ
Rн
1
б)
X
3
5
a1
b 1 a2
b2
aK ZK b K aN–1 b N–1 a N
4
bN
Z
Рис. 3.1. Возбуждение и прием ПАВ с помощью встречноAштыревого
преобразователя: а – устройство на ПАВ на основе ВШП (1 – возбуждаA
ющий ПАВ преобразователь, 2 – приемный преобразователь); б–
поперечное сечение преобразователя (3 – электроды ВШП, 4 – пьезоэA
лектрическое полупространство, 5 – мгновенная структура электричесA
кого поля преобразователя)
46
ε эф,
пФ/М
400
0
200
0
m
2,7
1
2
3,0
b
4
200
4
ω ·10 ,
с/м
400
Рис. 3.2. Эффективная диэлектрическая проницаемость YZAсреза
ниобата лития
G (z, κ) = GC (z) + GПАВ (z, κ) + GB (z, κ),
(3.4)
где GC (z) – электростатическая часть, ответственная за статическую
емкость электродов; GПАВ (z, κ) – соответствует возбуждению
ПАВ; GB (z, κ) – соответствует возбуждению объемных волн.
С точки зрения практического использования представляет инте'
рес часть функции Грина, связанная с возбуждением ПАВ. Для эф'
R
( κ)
фективной диэлектрической проницаемости рэлеевской волны ε эф
справедлива аппроксимация, предложенная Ингебригтсеном:
R
∞
ε эф
( κ) ≈ ε эф
κ2 − κ20
κ2 − κ2S
.
(3.5)
где ε ∞эф = ε эф ( κ) при κ → ∞ . Данная аппроксимация позволяет вычис'
лить аналитически интеграл (3.2) и получить выражение для функ'
ции Грина рэлеевской волны в дальней зоне источника:
GПАВ (z − z0 , κ) = − jGR 0 exp[− jκ z − z0 ],
(3.6, a)
где GR 0 = ( κ0 − κ S )/( κ0 ε∞S ) ≈ 1 κ2ЭМ , κ2 = 2∆V .
ЭМ
∞
V
2ε эф
Часть функции Грина, описывающая электростатическое поле,
равна
GC (z) = −
ln z
ε∞эф π
.
(3.6, б)
Введенное понятие эффективной диэлектрической проницаемо!
сти является универсальным инструментом при решении задач, свя!
47
занных с возбуждением акустических волн. Причем понятие эффек'
тивной диэлектрической проницаемости позволяет рассчитывать эф'
фективность возбуждения практически любых типов акустических
волн, в том числе «вытекающих», псевдоповерхностных, объемных.
3.3. Входная проводимость преобразователя в приближении
слабых отражений от электродов
Для расчета устройств на ПАВ необходимо знать проводимость
возбуждающего и приемного преобразователя. Следует подчеркнуть,
что именно частотная зависимость проводимости входного и выход'
ного ВШП в первую очередь определяют форму частотной характери'
стики трансверсального фильтра.
Структура электрического поля в ВШП (рис. 3.1, б) хорошо под'
ходит к структуре поля поверхностной акустической волны, имею'
щей поляризацию, близкую к вертикальной. Конечно, такая струк'
тура электрического поля ВШП допускает возбуждение и объемных
волн, что и наблюдается в реальных устройствах. Возбуждение
объемных волн ВШП – нежелательное явление, поэтому обычно вы'
бирают материал и плоскость среза, имеющие минимальный уровень
возбуждения объемных волн.
Можно показать, что в результате интегрирования вектора Пойн'
тинга в области, охватывающей преобразователь и источник сторон'
него тока, а также пренебрегая потерями на проводимость и накоп'
лением реактивной энергии в объеме V, при V → 0 (т. е. стягивая
поверхность S к поверхности преобразователя), получим
1
1
U0 I0* = jω∫ ϕΣ (x, y, z, ω) D* (x, y, z, ω)ndS,
(3.7)
S
где ϕΣ (x, y, z, ω) – суммарный электрический потенциал, создаваемый
распространяющейся под ВШП акустической волной и статическим
зарядом на электродах; S – поверхность, охватывающая преобразо'
1
ватель,
1 * n – нормаль к поверхности. Вектор электрического смеще'
ния D (x, y, z, ω) можно определить на основе граничного условия на
границе пьезоэлектрик – вакуум: DX (x = 0+ , z) − DX (x = 0− , z) = σ(z) .
Используя связь вектора смещения с плотностью поверхностного
заряда на границе раздела сред и связь поверхностного заряда с по'
верхностным током, (3.7) можно преобразовать к виду
Yвх (ω) =
48
I0*
1
= 2 ∫ W (z)ϕΣ (z, ω)J * (z)dz,
U0 U0 L
(3.8)
где Yвх(ω) – входная проводимость преобразователя; контур L обра'
зован совокупностью отрезков [аk, вk], причем аk, вk – координаты
краев электродов в направлении оси z (см. рис. 3.1, б); W(z) – аперту'
ра электродов; J(z) – распределение плотности поверхностного тока
в электродах.
Расчет входного импеданса преобразователя по соотношению вида
(3.8) известен как «метод реакции».
В соответствии с (3.8) эквивалентная схема ВШП включает ак'
тивную Re{Yвх } = G А (ω) и реактивную Im{Yвх } = BA (ω) + ωCВШП со'
ставляющие входной проводимости (рис. 3.3, а), причем реактивная
часть обусловлена реактивной составляющей проводимости излуче'
ния ВА(ω) и статической емкостью преобразователя СВШП:
Yвх (ω) = G A (ω) + jBA (ω) + jωCВШП .
(3.9)
Следует отметить, что на основе теории цепей возможен переход к
последовательной эквивалентной схеме, приведенной на рис. 3.3, б.
Расчеты по соотношению (3.8) приводят к действительной части
входной проводимости преобразователя вида
{
}
Re Yвх (ω) =
GR 0
ωU02
⎧⎪
⎫⎪
Re ⎨ ∫ W (z) ∫ J * (z) J (z0 )exp[ j κ(z0 − z)]dz0 dz ⎬. (3.10)
⎩⎪ L
⎭⎪
L
Соотношение (3.10) не представляется сложным для численного
интегрирования. Вместе с тем в некоторых случаях требуется опера'
тивно оценить ожидаемые характеристики устройства. В этом слу'
чае вполне приемлемо использовать упрощенные соотношения, спра'
б)
а)
ВШП
ВШП
Rг
U0
LC
C
ВШП
LC
Rг
BA(f) GA(f)
C ВШП X (f)
A
RA(f)
U0
Рис. 3.3. Схемы подключения ВШП к генератору и эквивалентные
схемы ВШП (показаны пунктиром): а – параллельная; б – последоваA
тельная (RГ,LС – сопротивление генератора и согласующая
индуктивность соответственно)
49
ведливые для частного случая преобразователя с электродами неиз'
менной вдоль ВШП апертурой.
3.3.1. Однородный преобразователь
Под однородным преобразователем будем понимать ВШП, у кото'
рого период и перекрытие соседних электродов неизменны. В этом
случае соотношение (3.10) может быть упрощено и примет вид
4 2
2
κЭМ ωCВШП N2 J (ω) ,
(3.11)
π
где N2 – число пар электродов; CВШП– емкость преобразователя, равная
G А (ω) ≈
CВШП = 0,5W0 C2 N,
(3.12)
где W0 – апертура электродов; С2 – емкость пары электродов на еди'
ницу их длины. Фурье – компонента распределения поверхностного
тока на электродах однородного преобразователя
J (ω) = sin(x)/ x,
(3.13)
где x = N2 π(ω − ω0 )/ ω0 ; ω0 – центральная частота.
Коэффициент электромеханической связи κ2ЭМ [см. расшифровки
к (3.6, а)] – важная характеристика материала и определяет макси'
мальную величину входной проводимости преобразователя при выб'
ранной его апертуре.
3.3.2. Неоднородный преобразователь
Под неоднородным преобразователем будем понимать ВШП, у ко'
торого период и перекрытие соседних электродов (апертура) Wk мо'
гут меняться. В этом случае соотношение (3.10) примет вид
4
G А (ω) ≈ κ2ЭМ ωCВШП N2
π
N
2
W
∑ Wk Jk (ω) ,
k =1 0
(3.14)
где СВШП – емкость преобразователя. В этом случае
N
CВШП = 0,5 ∑ Wk C2k ,
(3.15)
k =1
С2k – емкость между k'м и k + 1'м электродами на единицу их длины.
Частотные свойства преобразователя определяет фурье'компонента
распределения поверхностного тока в электродах преобразователя:
b
Jk ( κ) =
k
(bk − ak )
exp( j κzk ) ∫ J (z)exp[− jκ(zk − z)]dz.
I0
a
k
50
(3.16)
Величина Jk(κ) определяет вид частотной характеристики устрой'
ства в тех случаях, когда отражениями в электродной структуре мож'
но пренебречь.
Распределение поверхностного тока на электродах J (z) является
сложной функцией, зависящей как от геометрии самих электродов и
их взаимного расположения, так и от параметров акустической вол'
ны, распространяющейся под электродами.
Для практических расчетов в большинстве случаев вполне прием'
лемо использовать модель однородного распределения поверхност'
ного тока. В этом случае (3.16) легко вычисляется и имеет вид
Ik
⎡ κ(b − ak ) ⎤
(3.17)
exp( jκzk )sin c ⎢ k
⎥,
I0
2
⎣
⎦
где Ik – ток в k'м электроде; zk – координата центра k'го электрода,
κ = ω / VПАВ.
Для расчета мнимой части входной проводимости, связанной с
возбуждением ПАВ, часто используется преобразование Гильберта,
которое является общим свойством комплексной функции и состоит
в том, что действительная (мнимая) часть аналитической функции
однозначно определяет ее мнимую (действительную) часть. Тогда,
для реактивной части входной проводимости преобразователя мож'
но записать:
Jk ( κ) =
∞
G (ω )
1
BA (ω) = vp ∫ A 0 dω0 ,
π −∞ ω0 − ω
(3.18)
где vp – главное значение интеграла.
Соотношение (3.18) пригодно для расчета мнимой составляющей
входной проводимости ВШП с постоянным периодом, т. е. для расче'
та проводимости ВШП дисперсионного типа оно не пригодно. В слу'
чае ωCВШП >> BA (ω) этой частью входной проводимости можно пре'
небречь.
Соотношения (3.14),(3.15) и (3.17) позволяют рассчитать дей'
ствительную часть входной проводимости преобразователя, как вход'
ного (прямое преобразование ПАВ), так и выходного (обратное пре'
образование ПАВ). Причем эти соотношения годятся и для расчета
структур с одним аподизованным преобразователем, а также в том
случае, когда период одного или обоих ВШП меняется, т. е. с ВШП
дисперсионного типа.
В заключение следует подчеркнуть, что полученные выше выра'
жения для входной проводимости пригодны лишь для расчета уст'
ройств, в которых отраженные волны не участвуют в формировании
АЧХ устройства или заметно на нее не влияют.
51
3.4. Проектирование устройств на ПАВ
Полученные в подразд. 3.3 соотношения позволяют проектиро'
вать ряд устройств на ПАВ типа линий задержки, трансверсальных
фильтров и дисперсионных линий задержки в случае, когда можно
пренебречь отраженными волнами.
Зная входную проводимость преобразователя, достаточно просто
рассчитать потери на преобразование встречно'штыревым преобра'
зователем:
⎡
⎤
2Yг G A (ω)
(3.19)
⎥ , дБ,
AВШП (ω) = 10log10 ⎢
2
⎢ Yвх (ω) + Yг + Yс ⎥
⎣
⎦
где Yг – проводимость генератора (или нагрузки для приемного пре'
образователя); Yс = 1 / (jωLс) – проводимость согласующей индуктив'
ности.
В знаменатель (3.17), вообще говоря, необходимо добавить про'
водимость электродов, не связанную с возбуждением ПАВ. Это так
называемые резистивные потери в электродах. Они заметны лишь на
высоких частотах, и обычно ими также можно пренебречь.
Фазочастотная характеристика устройства, обусловленная вход'
ным или выходным преобразователями, может быть рассчитана по
соотношению
⎡ B (ω) ⎤
ϕВШП (ω) = −arctg ⎢ A
(3.20)
⎥.
⎣ G A (ω) ⎦
Суммарная ФЧХ устройства равна сумме ФЧХ входного, выход'
ного ВШП и набега фазы на длине распространения ПАВ между пре'
образователями ϕ = κL .
Амплитудно'частотная характеристика А(ω) устройства на ПАВ
типа трансверсального фильтра или линии задержки определяется
потерями на преобразование на входном – АВШП'1(ω) и выходном –
АВШП'2(ω) преобразователях, а также потерями при распростране'
нии ПАВ между преобразователями, и может быть рассчитана по со'
отношению
A (ω) = AВШП'1 (ω) + AВШП'2 (ω) + T(ω), дБ,
(3.21)
где T (ω) = 10log10 {exp[−α(ω)l]} – потери на распространение ПАВ
между преобразователями; A(ω) – постоянная затухания ПАВ на ча'
стоте ω; l – расстояние между преобразователями. Потери в преобра'
зователях могут быть рассчитаны по соотношению (3.19).
Потери при распространении ПАВ в кристалле в основном обус'
ловлены тепловыми колебаниями кристаллической решетки. Напри'
52
мер, для ниобата лития YZ'среза экспериментально измеренная их
частотная зависимость хорошо аппроксимируется функцией
{
T (ω) ≈ 0,19(ω/ ω1 ) + 0,88(ω/ ω1 )1,9
}V l
106 , дБ,
(3.22)
ПАВ
а для кварца ST,X'среза аналогичная зависимость имеет вид
{
T (ω) ≈ 0,47(ω / ω1 ) + 2,62(ω/ ω1 )2
}V l
106 , дБ,
(3.23)
ПАВ
где ω1 – частота, равная 1 ГГц.
Потери T(ω) существенны для устройств на ПАВ типа линии за'
держки, а в фильтрах на ПАВ ими, как правило, можно пренебречь.
Процедура проектирования устройства на ПАВ, не имеющего мно'
гополосковых ответвителей и отражательных структур, включает
выбор материала звукопровода (на котором останавливались ранее)
и расчет или выбор основных параметров преобразователей.
Расчет преобразователей включает:
– расчет периода следования электродов и их ширины:
– расчет числа электродов в ВШП;
– расчет апертуры преобразователя;
– выбор функции аподизации;
– расчет расстояния между входным и выходным ВШП;
– расчет согласующих элементов;
– выбор толщины электродов ВШП.
Рассмотрим перечисленные выше этапы подробнее.
Определение периода следования электродов ВШП и их шири)
ны. Полупериод электродов p выбирается равным половине длины
ПАВ:
р = VПАВ / (2f0),
(3.24)
а ширина электрода четверти длины волны, причем f0 – централь'
ная частота.
Определение числа электродов в ВШП. Приближенно число элек'
тродов ВШП можно оценить по соотношению
N ≈ 2f0 / ∆f,
(3.25)
где ∆f – заданная полоса частот устройства по уровню –3 дБ. По'
скольку реальная полоса частот устройства зависит от используемой
в ВШП функции аподизации и условий согласования на входе и вы'
ходе преобразователя (см. рис. 1.9, 1.11), вычисленное по (3.25) зна'
чение N необходимо уточнить методом подбора с использованием со'
отношений (3.14),(3.17), (3.19), (3.21).
53
Оптимальное число электродов. При числе электродов в ВШП,
равном Nопт, акустическая добротность преобразователя Qa совпада'
ет с его электрической добротностью Qэ. Значения добротностей мож'
но вычислить по соотношениям:
QA ≈ f0 / ∆f ≈ N2 ,
(3.26, а)
(3.26, б)
QЭ ≈ ω0 СВШП / G A (ω0 ) ≈ π /(4κ2ЭМ N2 ).
Равенство акустической и электрической добротности соответству'
ет ситуации, когда преобразователь имеет высокую эффективность в
максимальной полосе частот. Приравнивая (3.26, а) и (3.26, б), для
оптимального числа пар электродов N2, опт получим
N2,опт = π /4κ2ЭМ .
(3.27)
Параметры наиболее популярных в технике ПАВ'материалов при'
ведены в табл. 3.1.
Выбор апертуры преобразователя W0 проводится из условия
согласования ВШП с нагрузкой. Активная часть входной проводи'
мости ВШП на центральной частоте должна быть равна активной
части проводимости источника сигнала (генератора) или нагрузки,
обычно составляющей 1 / 50 [1 / Ом]. При этом предполагается, что
реактивная составляющая входной проводимости будет скомпенси'
рована элементами согласования, например индуктивностью. Поэто'
му при выборе апертуры ВШП будем исходить из условия, следующе'
го из (3.11):
4 2
κ ЭМ ωCВШП N2 ,
(3.28)
π
где СВШП = W0C2N2. При использовании (3.28) предполагается, что
материал звукопровода и число электродов в ВШП выбраны.
Выбирая апертуру преобразователя, необходимо учитывать воз'
можные дифракционные потери, связанные с расходимостью акус'
тического луча, ограниченной апертуры. Поэтому апертура электро'
дов ВШП не должна быть меньше значения, определяемого границей
зоны Френеля:
Re{Yг } ≈ G А (ω0 ) =
W > λl 1 + γ ,
(3.29)
где γ – параметр анизоторопии; l – длина пути распространения ПАВ.
Например, для ниобата лития YZ'среза γ = –1,083, для кварца ST'
среза γ = +0,378. В случае нарушения условия (3.29) при расчете
ПАВ'устройства необходимо учитывать дифракционную расходи'
мость акустического луча, что является очень непростой задачей,
54
Таблица 3.1
Срез
Скорость'
ПАВ,м/с
N2, opt
k2ЭМ
Wopt / l0
С2, пФ / м
Ниобат
лития
YZ
3488
4
0,048
108
464
Kварц
ST
3158
23
0,0014
46
50
Материал
решение которой не гарантирует получение качественных характе'
ристик устройства.
Функция аподизации выбирается исходя из требуемых парамет'
ров устройства в частотной области. Наиболее часто используются
функции аподизации в виде функции Хемминга, Тейлора, Гаусса,
Кайзера и sin(x) / x. Простейшая весовая функция – функция Хем'
минга, часто используемая при проектировании ПАВ'устройств,
имеет вид
⎡ zk − zN /2 ⎤ ⎪⎫
⎪⎧
Wk = W (zk ) = W0 ⎨0,08 + 0,92cos2 ⎢ π
⎥ ⎬,
(3.30)
⎪⎩
⎣ zN − z1 ⎦ ⎪⎭
где zk = 0,5 (VПАВ / f0)k; k принимает значения от 1 до N.
Более подробно типы весовых функций будут рассмотрены далее в
подразд. 6.9. Введение функции аподизации Хемминга в один из пре'
образователей фильтра позволяет увеличить внеполосное подавле'
ние с ~13дБ до ~25 дБ. Для получения большего внеполосного подав'
ления необходимо ввести функцию аподизации и во второй преобра'
зователь, однако для реализации правильной суммарной весовой
функции фильтра это требует введения в конструкцию фильтра отра'
жательных структур или многополоскового ответвителя. Этот воп'
рос будет рассмотрен в гл. 5.
В отличие от прочих функций аподизации, мало меняющих пря'
моугольность АЧХ фильтра, функция аподизации вида sin(x) / x ис'
пользуется для получения АЧХ с коэффициентами прямоугольнос'
ти, близкими к 1.
Расчет или выбор расстояния L между входным и выходным
ВШП. В случае фильтра расстояние L выбирается исходя из допусти'
мого уровня прямой связи через паразитную емкость между входом и
выходом, которая должна давать существенно меньший уровень сиг'
нала на выходе, чем акустическая связь через ВШП при минималь'
55
ных габаритах устройства. Для линии задержки расстояние L обес'
печивает необходимую задержку сигнала.
Расчет согласующих элементов обычно проводится из условия
компенсации статической емкости входного и выходного преобразо'
вателей (см. эквивалентную схему рис. 3.3):
1 / [ωLс] = ω СВШП,
(3.31)
где Lc – согласующая индуктивность; схема включения Lc показана
на рис. 3.3.
В тех случаях, когда активная составляющая входной проводи'
мости существенно отличается от проводимости генератора и необ'
ходимо обеспечить низкий уровень отражений от электрической на'
грузки, используют трансформаторы импеданса.
Толщина электродов (hМ) ВШП в устройствах типа линии задер'
жки или трансверсального фильтра выбирается исходя из того, что'
бы обеспечить низкий уровень отражений ПАВ от электродов, при
приемлемом уровне сопротивления потерь электродов. При не очень
большом числе электродов в ВШП и малом коэффициенте связи это
обеспечивается толщиной hM / λ ~ 0,01 . Типичное значение толщи'
ны электродов составляет 0,1…0,3 мкм.
Помимо отражений, связанных с механической нагрузкой элект'
рода на поверхность звукопровода, имеют место отражения, связан'
ные с «электрической нагрузкой» поверхности. Cтруктура поля, а
главное, – скорость акустической волны зависят от электрических
граничных условий на поверхности. Эти отражения пропорциональ'
ны разности скоростей на свободной и металлизированной поверхно'
сти при hM → 0 или коэффициенту электромеханической связи
2∆V
. В тех случаях, когда выбором толщины электродов про'
V
блему отражений решить не удается, используются расщепленные
электроды (подразд. 3.6), отражения от которых взаимно компенси'
руют друг друга.
κ2ЭМ =
3.5. Отражательные структуры для устройств на ПАВ
Помимо встречно'штыревых преобразователей различного кон'
структивного исполнения к основным конструктивным элементам,
из которых состоят устройства на ПАВ, относятся отражательные
структуры и многополосковые ответвители. На базе этих трех эле'
ментов построено большинство современных АЭУ. Многополоско'
вые ответвители и устройства на их основе будут рассмотрены в сле'
дующей главе. Рассмотрим отражательные структуры.
56
3.5.1. Отражательные элементы
Любая отражательная структура состоит из последовательности
отражательных элементов. Основными отражательными элемента'
ми для устройств на ПАВ являются металлические полоски или ка'
навки (рис. 3.4). Металлические полоски толщиной много меньше
длины волны формируются на поверхности пьезоэлектрика (звуко'
провода) методами электронно'лучевого испарения металла в вакуу'
ме и контактной фотолитографии. Канавки формируются путем из'
бирательного ионно'химического травления поверхности звукопро'
вода через металлические маски из напыленного на поверхность тон'
кого слоя металла или маски из тонкого фоторезистивного слоя.
Изменение рельефа или состояния поверхности (наличие канавки
или металлической полоски) вызывает частичное отражение падаю'
щей на неоднородность акустической волны. Кроме того, наличие
неоднородности приводит к частичному преобразованию падающей
волны в другие типы волн, которые могут существовать в материале
звукопровода. Эффективность преобразования в другие типы акус'
тических волн (эффективность рассеяния) определяется видом нео'
днородности. Для минимизации нежелательных эффектов, возни'
кающих при отражении ПАВ и ухудшающих работу устройства, тол'
щину металлической пленки отражателя или глубину канавки вы'
бирают много меньшей длины волны.
Ввиду сложности, громоздкости и, вместе с тем, недостаточной
точности теоретического метода расчета коэффициентов отражения
и рассеяния ПАВ поверхностными неоднородностями в анизотроп'
ных кристаллах, на практике обычно пользуются эмпирическими
p
а)
a
б)
a
hm
p
hg
Рис. 3.4. Поперечное сечение отражательных структур в виде
металлических полосок (а) или канавок (б) на поверхности кристалла
(звукопровода)
57
аппроксимациями. Малый размер неоднородности по сравнению с
длиной акустической волны позволяет использовать для коэффици'
ента отражения простые соотношения, удобные для расчета.
Нормальное падение ПАВ. При нормальном падении ПАВ на от'
ражательный элемент в виде канавки (направление распростране'
ния волны перпендикулярно краю канавки) коэффициент отраже'
ния, приведенный к ее центру:
rg ( κ) = 2 jC
hg
(3.32)
sin( κa),
λ
где C – коэффициент отражения от ступеньки, приведенный к высоте
hg, равной длине волны λ (эмпирически определяемая величина при
hg / λ << 1 ); κ – волновое число ПАВ; a – ширина канавки. В случае
нормального падения ПАВ на канавку и hg / λ < 0,1 для ниобата ли'
тия YZ'среза коэффициент С = 0,33, а для кварца ST'среза С = 0,27.
Отражение ПАВ от металлической полоски обусловлено двумя
причинами: во'первых, замедлением ПАВ за счет изменения струк'
туры электрического поля (или потенциала) вблизи металла полос'
ки (часто говорят об электрической нагрузке) и, во'вторых, за счет
механического воздействия массы полоски на поверхность (механи!
ческой нагрузки), приводящего также
к замедлению ПАВ. Таким об'
.
разом, коэффициент отражения r m при κa = π/2 можно представить
в виде
2
hm . ⎛ hm ⎞
(3.33)
+ b2 ⎜
⎟ + ... ,
λ
⎝ λ ⎠
.
.
.
где r mэ , b1 , b2 – эмпирические постоянные.
Коэффициент отражения ПАВ от полоски зависит от материала
отражателя и звукопровода, относительной ширины полоски ( a / λ )
и, как правило, определяется эмпирически. Характер изменения ко'
эффициента отражения от одной полоски, выполненной из различ'
ных материалов и расположенной на поверхности 128° YX LiNbO3, в
зависимости от относительной толщины и ширины полоски, пока'
зан на рис. 3.5 и 3.6 соответственно.
Сопоставляя (3.33) с поведением кривых на рис. 3.6, можно зак'
лючить, что синусоидальный характер изменения коэффициента от'
ражения в зависимости от относительной ширины полоски является
приближенным.
.
.
.
r m ( κ) ≈ r mэ + b1
3.5.2. Отражательные структуры
Рассмотрим теперь соотношения, описывающие процесс отраже'
ния ПАВ от отражательной структуры в целом.
58
rm
0,04
a
0,03
hm
Pb
λ /4 λ/4
0,02
0,01
0,00
–0,01
–0,02
0,01
0,03
0,05
0,07
0,09 Au hm /λ
Si02
Sn
–0,03
Cr Ni Co Cu Pt
–0,04
Ag
Al
Рис. 3.5. Модуль коэффициента отражения от одной полоски
(электрода), выполненной из различных материалов, в составе отражаA
тельной структуры с закороченными электродами, расположенными
на поверхности 128° YX LiNbO3
rm
0,03
h m /λ = 0,
0,01
0,02
0,01
0,0
K3
0,02
0,25
0,5 a / λ
–0,01
–0,02
–0,03
–0,04
0,0
0,01
hm / λ = 0,02
XX
Рис. 3.6. Модуль коэффициента отражения от алюминиевой полоски,
λ – нормализованA
расположенной на поверхности 128° YX LiNbO3 (a/λ
λ – нормализованная толщина полоски;
ная ширина полоски; hm/λ
«кз» – заземленная полоска; «хх» – не заземленная полоска)
59
Нормальное падение ПАВ. Направление распространения вол'
ны, отраженной от отражательной структуры, и частоту максималь'
ного отражения можно определить на основе связи волновых векто'
ров падающей и отраженной волн (рис. 3.7):
1
1
1
Kвх + Kg = Kвых ,
(3.34)
1
1
1
где Kg – волновой вектор ОС; Kвх , Kвых – волновые вектора падаю'
щей и отраженной ПАВ, причем модули волновых векторов
Kвх = Kвых = ω / VПАВ. Для ОС, состоящей из бесконечного числа от'
ражателей бесконечной длины:
Kg = 2πn / p,
(3.35)
1
где n – номер гармоники; p – период ОС в направлении Kg .
В случае нормального падения ПАВ на ОС из соотношений (3.34)
и (3.35), с учетом равенства Kвх = Kвых, можно заключить, что длина
волны, при которой имеет место максимальное отражение от канав'
ки, λ0 = 4a = 2p, при a = p / 2. Направление отраженной волны, об'
ратно направлению падающей.
Коэффициент отражения ПАВ от отражательной структуры, со'
стоящей из NОС отражателей (см. рис. 3.7), находится простым сум'
мированием волн, отраженных каждым отражателем. В случае ма'
лости коэффициента отражения от одной канавки h / λ << 1 и, пре'
небрегая многократными отражениями внутри ОС, коэффициент от'
ражения ОС можно определить как
K вх
K вых
Kg
p
K вых
K вх
Рис. 3.7. Векторные соотношения в отражательной структуре при
нормальном падении ПАВ
60
K OC (ω,z) =
NOC
∑ rgK (ω)exp[jω(z − zk )/ V ],
k =1
(3.36)
где rgK(ω) – коэффициент отражения от k'й канавки, приведенный к
ее центру; zk – координата центра k'й канавки, z –точка наблюде'
ния.
Достоинством выражения (3.36) является тот факт, что оно при'
годно для расчета коэффициента отражения ПАВ от ОС с изменяю'
щимся периодом и апертурой отражателей. Следует подчеркнуть, что
именно такие отражательные структуры используются в дисперси'
онных линиях задержки.
Вместе с тем соотношение (3.36) непригодно для расчета коэффи'
циента отражения от ОС, используемых в резонаторах и резонанс'
ных фильтрах. В этом случае важны многократные отражения ПАВ
внутри отражательной структуры.
Использование модели неоднородной линии передачи приводит к
следующему приближенному выражению для коэффициента отраже'
ния ПАВ от отражательной структуры, учитывающему многократ'
ные переотражения:
R (ω) =
r (ω)tanh[σ(ω) NOC ]
,
σ(ω) + jδ(ω)tanh[σ(ω) NOC ]
(3.37)
где r(ω) – коэффициент отражения от элемента ОС; σ(ω) = r (ω)2 − δ(ω)2 ,
δ(ω) = π(ω − ω0 )/ ω0 – расстройка; ω0 – центральная частота ОС.
В качестве примера на рис. 3.8 показаны зависимости модуля ко'
эффициента отражения R(ω) от относительной частоты. На рис. 3.9
показаны зависимости модуля коэффициента отражения на цент'
ральной частоте ОС R0 = R (ω0 ) от количества отражающих элемен'
тов. Зависимости, изображенные на рис. 3.8 и 3.9, рассчитаны по
соотношению (3.37).
Недостатком соотношения (3.37) является тот факт, что оно при'
годно для расчета ОС с постоянным периодом и апертурой, т. е. об'
ласть его использования весьма ограничена.
Наклонное падение ПАВ. В случае наклонного падения ПАВ на
отражательную структуру анализ процесса отражения удобно прово'
дить с использованием векторных диаграмм (рис. 3.10). Как и в слу'
чае нормального падения ПАВ имеет место связь волновых векто'
ров:
61
R (ω)
Noc =800
0,8
400
0,6
200
0,4
0,2
0,0
–0,01
0,00
(ω – ω0 )/ω
0,01
0
ω) от относиA
Рис. 3.8. Зависимость модуля коэффициента отражения R(ω
тельной частоты при rg = 0,005
R0
r g = 0,005
1,0
r g = 0,001
0,8
0,6
0,4
0,2
500
1000
NOC
Рис. 3.9. Зависимость модуля коэффициента отражения на центральной
частоте R0 = R(w0) от количества отражающих элементов при rg = 0,005
и 0,001; ( κa = π/2 )
1
1
1
Kвх + Kg = Kвых ,
(3.38)
1
1
1
где Kg – волновой вектор ОС; Kвх , Kвых – волновые вектора падаю'
щей и отраженной ПАВ; Kвх = ω / VПАВ,вх; Kвых = ω / VПАВ,вых. Для
отражательной структуры, состоящей из бесконечного числа отра'
жателей бесконечной длины:
Kg = 2πn / p,
(3.39)
где n – номер гармоники1(ОС обычно используется
при
n
=
1);
p
– пе'
1
риод ОС в направлении Kg ; волновой вектор Kg направлен перпен'
62
Kвх
θ
Kвых
Kg
K
p
вх
θ
K
вых
Рис. 3.10. Векторные соотношения в отражательной структуре при
наклонном падении ПАВ
дикулярно оси отражателей. Соотношения (3.38) и (3.39) можно ис'
пользовать и для отражательных структур с конечным числом эле'
ментов, конечной длины, при условии, что длина их много больше
длины волны.
При наклонном падении ПАВ на отражательный элемент в виде
канавки коэффициент отражения, приведенный к центру канавки:
rg ( κ) = j2C
hg
sin{κa /[2cos(θ)]},
(3.40)
λ
где а – ширина канавки в направлении нормали к ее краю.
В случае углов θ , близких к 45°, и hg / λ < 0,01 для ниобата лития
YZ'среза коэффициент C≈ 0,51, а для кварца ST'среза С≈ 0,6.
Следует отметить, что скорость ПАВ в отражательной структуре
отлична от скорости ПАВ на свободной поверхности, как в случае ОС
в виде полосок, так и в случае ОС в виде канавок. Кроме того, из'за
анизотропии свойств кристаллов, скорости ПАВ в различных направ'
лениях могут отличаться.
Векторное соотношение (3.38) двумерное и содержит два скаляр'
ных уравнения, из которых можно определить направление и часто'
ту отраженной волны. Для часто используемого на практике угла
отражения, равного 90°, угол падения ПАВ должен удовлетворять
соотношению
tgθ = Kвых / Kвх = Vвх / Vвых .
Для изотропных материалов Vвх = Vвых и θ = 45°.
В анизотропных материалах Vвх ≠ Vвых и θ ≠ 45°, причем соотно'
шение (3.38) дает лишь приблизительное значение угла, точность
63
Таблица 3.2
Нормаль
к поверхности
Направление
падения ПАВ
q, градус
Ниобат лития
Y
Z
43,18
Kварц
ST
X
41,93
Kварц
Y
X
39,67
Материал звукопровода
которого недостаточна для практического использования. Измерен'
ные экспериментально значения углов θ , обеспечивающие 90'градус'
ное отражение ПАВ, приведены в табл. 3.2.
3.6. Подавление отраженных волн в преобразователях
При распространении ПАВ в электродной структуре преобразова'
теля имеет место процесс отражения волны от каждого электрода. В
резонансных фильтрах этот процесс играет положительную роль и
используется для формирования резонансной характеристики. Од'
нако в трансверсальных фильтрах наличие отраженных волн иска'
жает частотную характеристику устройства. Наиболее заметные ис'
кажения частотной характеристики возникают при использовании
материалов с большим коэффициентом электромеханической связи,
таких как ниобат и танталат лития, и числе электродов ВШП более
20. Эти материалы имеют большой коэффициент отражения ПАВ от
полоски, модуль которого составляет ~2,3% при толщине электро'
дов, выполненных из алюминия ~1% от длины волны. В материалах
2 , таких как пьезокварц, отражения слабее, но в ВШП
с небольшим κЭМ
на пьезокварцевых подложках обычно используется большое коли'
чество электродов – от ~50 до 1000, и проблема искажения АЧХ так'
же имеет место. Поэтому при проектировании устройств на ПАВ обыч'
но выбирают структуру электродов ВШП, которая хотя бы частично
гасила отраженные от электродов волны.
Обычный ВШП имеет два электрода на период (рис. 3.11, а). От'
раженные волны в такой структуре складываются в фазе. Наиболее
распространенным типом ВШП, подавляющим паразитные переот'
ражения, является ВШП с расщепленными электродами, имеющий
четыре электрода на период. Каждый электрод такого ВШП имеет
ширину вдвое меньше обычной (рис. 3.11, б). Механизм компенса'
ции основан на том факте, что отраженные от электродов волны по'
парно складываются в противофазе (см. рис. 3.11, б).
64
o
а)
o
360
o
180 180
o
180
б)
в)
o
o
120 120
ПАВ
λ 0 /4
λ 0 /6
λ 0 /8
λ 0 /4
λ 0 /6
λ 0 /8
Рис. 3.11. Конструкции ВШП с обычными (а)
и расщепленными электродами (б) и (в)
В высокочастотных применениях, когда ширина электрода ста'
новится порядка или менее микрона, что вызывает сложности для
бездефектного изготовления ВШП методом оптической фотолитог'
рафии, используют три электрода на период (рис. 3.11, в). Такая
структура ВШП также подавляет паразитные переотражения, одна'
ко в этом случае отраженные волны от трех соседних электродов дают
суммарную амплитуду отраженной волны, равную нулю.
Следует иметь в виду, что полная компенсация отраженных волн
имеет место лишь на центральной частоте. При отклонении частоты
ПАВ от f0 меняется длина волны и, соответственно, фазовый набег, а
значит, условие противофазности отраженных волн нарушается.
Причем оно нарушается тем сильнее, чем больше разница f0 − f .
На рис. 3.12 изображена рассчитанная с учетом паразитных пере'
отражений АЧХ трансверсального фильтра, выполненного на квар'
а)
A(ω)–Ao,
дБ
–10
–20
–30
–40
–50
–60
98
Ao = –18,5 дБ
б)
A(ω) –Ao,
дБ
–10
Ao = –19,6 дБ
–20
–30
–40
–50
–60
100
102
Частота, МГц
98
100
Частота, МГц
102
Рис. 3.12. Частотные характеристики фильтра с обычными (а)
и расщепленными (б) электродами ВШП
65
це ST'среза. Преобразователи фильтра содержат по 400 электродов,
причем ВШП'А имеет аподизацию по функции Тейлора. На рис. 3.12, а
изображена АЧХ устройства с нерасщепленными электродами, а на
рис. 3.12, б – с расщепленными. Как видно из рисунка, использова'
ние расщепленных электродов существенно улучшает форму АЧХ
устройства.
3.7. Расчет устройств на ПАВ на основе уравнений
связанных волн
Метод расчета устройств на ПАВ, изложенный в подразд. 3.2 – 3.4,
имеет ограниченную применимость. В частности он не годится для рас'
чета устройств на ПАВ, в которых для формирования частотных ха'
рактеристик используются отраженные волны. В данном подразделе
будет изложен универсальный метод, пригодный для расчета прак'
тически любых пассивных устройств на ПАВ.
Пусть на поверхности пьезоэлектрика задана структура в виде N
металлических электродов с произвольно меняющимся периодом и
перекрытием соседних электродов (рис. 3.1, б). Источник сигнала
частотой ω и амплитудой U0 подключен слева.
Пусть R(z,ω) и S(z,ω) – две связанные между собой плоские волны
с волновым числом κ, распространяющиеся в электродной структуре
ВШП. Причем R(z,ω) распространяется в направлении оси z (прямая
волна), а S(z,ω) – в направлении, противоположном оси z (обратная
волна). Однородные плоские волны запишем в виде
R (z, ω) = R (ω)exp(− jκz),
(3.41)
S(z, ω) = S(ω)exp( + jκz),
(3.42)
где R(ω),S(ω) – комплексные амплитуды соответствующих волн. За'
висимость от времени предполагается в виде exp(–jωt).
Рассмотрим k'й электрод ВШП (рис. 3.13). Пусть на k'й электрод
слева падает волна RK(z,ω), а справа – SK+1(z,ω). Прошедшие волны
с комплексными амплитудами SK(ω) являются суперпозицией пар'
циальных волн, образовавшихся за счет отражения падающей на
электрод волны с амплитудой RK(ω), части прошедшей через область
k'го электрода волны с амплитудой SK+1(ω) и волны, образовавшей'
ся за счет преобразования энергии переменного электрического поля,
создаваемого источником сигнала частотой ω и амплитудой U0, в по'
верхностную акустическую волну (рис. 3.14). Аналогично прошед'
шие волны с комплексными амплитудами RK+1(ω) являются супер'
66
LK
IK
I K+1
RK
RK+1
SK
SK+1
ZK
Z CK
Z K+1
WK
Z
Рис. 3.13. kAй электрод преобразователя
позицией парциальных волн, образовавшихся за счет отражения
падающей на электрод волны с амплитудой SK+1(ω), части прошед'
шей через область k'го электрода волны с амплитудой RK(ω) и волны,
образовавшейся за счет преобразования энергии переменного элект'
рического поля, создаваемого источником сигнала частотой ω и амп'
литудой U0, в поверхностную акустическую волну (см. рис. 3.14).
Тогда, для комплексных амплитуд прошедших волн SK(ω) и
RK+1(ω), с учетом соответствующих фазовых множителей и механиз'
мов отражения, прохождения и преобразования, можно получить
уравнения:
2⎤
⎡
−
SK (ω) = rK η1K ⎢1 − ζ K
(κ E ) ⎥
⎣
⎦
1/2
exp[− jκ E pK ]RK (ω) +
Электроды
Прямое и обратное
преобразование волн
aK
bK
R (ω)
K+1
z
R (ω)
S(ω)
S (ω)
K
Отраженные от электродов волны
Рис. 3.14. Физические процессы в преобразователе, учитываемые в
уравнениях связанных волн (3.43),(3.44)
67
2⎤
2
⎡
+η1K (1 − rK )1/2 ⎢1 − ζ +K ( κ E ) ⎥
⎣
⎦
1/2
−
exp[− jκ E pK ]SK +1 (ω) + ϕ1 UK
(κ), (3.43)
2⎤
2
⎡
RK +1 (ω) = η1K (1 − rK )1/2 ⎢1 − ζ −K ( κ E ) ⎥
⎣
⎦
1/2
1/2
exp[− jκ E pK ]RK (ω) +
2⎤
⎡
+
(κ), (3.44)
+rK η1K ⎢1 − ζ +K ( κ E ) ⎥ exp[− jκ E pK ]SK +1 (ω) + ϕ1 UK
⎣
⎦
где rK – комплексный коэффициент отражения от k'го электрода;
±
κE – эффективное волновое число ПАВ; pK = zK+1–zK; ϕ1 UK
(z, κ E ) – по'
тенциалы, создаваемые «бегущими» волнами, возбуждаемыми то'
ком в k'м электроде в направлениях +z и –z соответственно; коэффи'
циенты ζ +K ( κ E ) и ζ −K ( κ E ) – определяют уменьшение амплитуды вол'
ны при ее прохождении под электродом за счет частичного обратного
преобразования; η1K = W1K / W0 , η2 K = W2K / W0 , W0 – максимальная
апертура; W 2K – перекрытие k'го и (k+1)'го электродов;
W 1K = W 0 в случае, если используются холостые электроды и
W1K = W2K, если холостые электроды не используются.
Центр отражения (преобразования) zCK ПАВ принят находящим'
ся в центре электрода. Фазовые сомножители у слагаемых, связан'
ных с отражением (преобразованием) волн, определяют фазовый на'
бег от центра отражения (преобразования) волны zCK до соответству'
ющей границы [(zK – для SK(ω) и zK+1 для RK(ω)], где zK и zK+1 –
середины зазоров между соответствующими электродами.
Уравнения (3.43) и (3.44) достаточно просто могут быть преобра'
зованы к виду, в котором рассматриваются отражения волн от краев
электродов. В этом случае в уравнения (3.43),(3.44) вместо κE необ'
ходимо ввести волновые числа для свободной и металлизированной
поверхности и соответствующие фазовые множители.
Эффективное волновое число на отрезке между координатами
z K и z K+1 определим через среднее значение длины волны
κE = ωpK / [V0(pK–LK)+LKVM]–jaK, где V0 – скорость ПАВ на свобод'
ной поверхности, λм и Vм – длина волны и скорость ПАВ под метал'
лизированной поверхностью соответственно, α K – коэффициент за'
тухания, обусловленный всеми источниками потерь, при распрост'
ранении ПАВ в электродной структуре от координаты zK до коорди'
наты zK+1 и приведенный к единице длины.
±
Потенциалы, создаваемые током в k'м электроде ϕ1 UK
(z, κ E ) опре'
делим, используя соотношение (3.1):
68
±
(z, κ E ) =
ϕUK
1
iω
ZK +1
∫
GR± (z − z0 , κ E ) J (z0 , κ E )dz0 .
(3.45)
ZK
Пренебрегая реактивными полями источника и подставляя в
(3.45) функцию Грина (3.6, а),получим
±
ϕ1 UK
(z, κ E ) = ξ±K ( κ E )exp[± jκ E (z − zCK )]U0 ,
(3.46)
Z
−GR 0 K +1
(3.47)
J ( κ E , z0 )exp[± jκ E (z0 − zCK )]dz0 .
iωU0 Z∫
K
−
+
Тогда потенциалы ϕ1 UK
(z, κ E ) при z = zK и ϕ1 UK
(z, κ E ) при z = zK+1,
входящие в уравнения (3.43),(3.44):
ξ ±K ( κ E ) =
±
ϕ1 UK
( κ E ) = ξ ±K ( κ E )exp(− jκ E pK /2)U0 .
(3.48)
Уравнения (3.43),(3.44) позволяют рассчитать входную прово'
димость преобразователя с учетом отраженных от электродов волн.
Кроме того, они позволяют анализировать прохождение ПАВ через
отражательную структуру.
Получим теперь уравнение для тока в k'м электроде, дополняю'
щее уравнения (3.43),(3.44) и позволяющее формализовать проце'
дуру вычисления входной проводимости преобразователя.
Изменение тока в шине ВШП в области k'го электрода ∆IK(ω) оп'
ределим как произведение общей парциальной проводимости k'го
±
электрода Y1Вх
( κ E ) и напряжения на электроде. При этом будем по'
лагать, что в соответствии с принципом взаимности функциональ'
ные зависимости, определяющие прямое и обратное преобразование
ПАВ, комплексно сопряжены. Тогда уравнение для ∆IK(ω) будет
иметь вид
∆IK (ω) = IK (ω) − IK +1 (ω) = −[ξ−K 0 ( κ E )]* η2K exp[− jκ E pK /2]RK (ω) −
−[ξ+K 0 ( κ E )]* η2K exp[− jκ E pK /2]SK +1 (ω) +
+ξ−K 0 ( κ E ) η2 K exp[− jκ E pK /2]SK (ω) +
+ξ+K 0 ( κ E ) η2K exp[− jκ E pK /2]RK +1 (ω) +
{
}
+ jω W2 K C2 /2 + RE (W2K ωC2 /2)2 /[1 + ( RE W2K ωC2 /2)2 ] U0 ,
(3.49)
где звездочка есть знак комплексно сопряженной величины. В урав'
нении (3.49) помимо тока через статическую емкость электрода уч'
тен также ток через сопротивление электрода RE, не связанный с пре'
образованием ПАВ.
69
Первое и второе слагаемые в (3.49) определяют изменение тока за
счет частичного преобразования энергии падающих на электрод пря'
мой волны, амплитудой RK(ω) и обратной волны амплитудой SK+1(ω)
в энергию переменного электрического тока. Третье и четвертое сла'
гаемые в (3.49) определяют изменение тока за счет преобразования
энергии переменного электрического поля, создаваемого током, в пря'
мую волну амплитудой SK(ω) и обратную волну амплитудой RK+1(ω).
Последнее слагаемое в (3.49) определяет изменение тока в шине ВШП
за счет падения напряжения на статической емкости электрода, рав'
ной η2 K (C2 /2) . Подставляя (3.43) и (3.44) в (3.49), получим
∆IK (ω) = IK (ω) − IK +1 (ω) =
= η2K exp[− j κ E
2
pK
] × {−[ξ−K 0 (κ E )]* + η1K [1 − ζ −K ( κ E ) ]1/2 ×
2
×[rK ξ−K 0 ( κ E ) + (1 − rK )1/2 ξ +K 0 ( κ E )]exp[− jκ E pK ]} RK (ω) +
2
+η2K exp[− j κ E
2
pK
] × {−[ξ+K 0 ( κ E )]* + η1K [1 − ζ +K ( κ E ) ]1/2 ×
2
1/2 −
+
×[rK ξ K
ξ K 0 ( κ E )]exp[− jκ E pK ]}SK +1 (ω) +
0 ( κ E ) + (1 − rK )
2
{
+ jω W2K C2 /2 + RE (W2K ωC2 /2)2 /[1 + (RE W2 K ωC2 /2)2 ] +
}
+ {[ξ+K 0 ( κ E )]2 + [ξ−K 0 ( κ E )]2 }η22 K exp[− jκ E pK ] U0 .
(3.50)
Уравнения (3.43),(3.44),(3.50) связывают комплексные ампли'
туды падающих и прошедших волн справа и слева от k'го электрода
(или отражателя, в случае ОС). Эти уравнения позволяют, зная ком'
плексные амплитуды волн на входе ВШП (или ОС), а также коэффи'
циенты, входящие в эти уравнения, вычислить комплексные ампли'
туды волн на выходе ВШП (или ОС) и входную проводимость преоб'
разователя.
Для формализации процесса вычисления по соотношениям вида
(3.43),(3.44),(3.50) их удобно представить в матричной форме:
P(k) (1,1) P(k) (2,1) P(k) (3,1) RK (ω)
SK (ω)
RK +1 (ω) = P(k) (2,1) P(k) (2,2) P(k) (3,2) SK +1 (ω) ,
∆IK (ω)
U0
P(k) (3,1) P(k) (2,3) P(k) (3,3)
2
где P(k) (1,1) = rK η1K (1 − ζ +K )1/2 exp[− j κ E pK ] ;
70
(3.51)
2
P(k) (1,2) = +η1K (1 − rK )1/2 (1 − ζ +K )1/2 exp[− jκ E pK ] ;
2
−
P(k) (1,3) = +ξ K
( κ E )η2K exp[− jκ E pK /2] + ϕ1 −K ( κ E ) ;
2
P(k) (2,1) = η1K (1 − rK )1/2 (1 − ζ +K )1/2 exp[− jκ E pK ] ;
2
2
P(k) (2,2) = +rK η1K (1 − ζ +K )1/2 exp[− jκ E pK ] ;
P(k) (3,1) = η2K exp[− jκ E
pK
] × {[−ξ −K 0 (κ E )]* +
2
+η1K (1 − ζ K )1/2 [rK ξ−K 0 ( κ E ) + (1 − rK )1/2 ξ+K 0 (κ E )]exp[− jκ E pK ]};
2
P(k) (3,2) = +η2K exp[− jκ E
2
pK
] × {[−ξ +K 0 (κ)]* +
2
+η1K (1 − ζ K )1/2 [rK ξ+K 0 (κ) + (1 − rK )1/2 ξ −K 0 (κ)]exp[− jκ E pK ]};
2
2
P(k) (3,3) = + jωW2 K C2 /2 + RE (W2 K ωC2 /2)2 /[1 + (RE W2 K ωC2 /2)2 ] +
+{[ξ+K 0 ( κ E )]2 + [ξ−K 0 ( κ E )]2 }η22 K exp[− jκ E pK ] .
В случае если необходимо вычислить элементы P'матрицы ВШП в
целом (или ОС), которые будут связывать комплексные амплитуды
волн на входе и выходе ВШП (или ОС), а также содержать информа'
цию о входной проводимости ВШП, необходимо выполнить последо'
вательное перемножение P 'матриц, описывающих каждый элект'
род.
Используя систему уравнений (3.43),(3.44),(3.50) с произволь'
ными коэффициентами, записанную для двух последовательно вклю'
ченных ПАВ'структур, и условие равенства амплитуд и фаз потенци'
алов на границе ПАВ'структур, нетрудно получить компоненты их
суммарной P 'матрицы:
P( s) (1,1) = P(1) (1,1) + P(1) (1,2) P(2) (1,1) P(1) (2,1)/ P(0) ;
P( s) (1,2) = P(1) (1,2) + P(2) (1,2)/ P(0) ;
P( s) (1,3) = P(1) (1,3) + P(1) (1,2)[P(2) (1,3) + P(2) (1,1) P(1) (2,3)/ P(0) ;
P( s) (2,1) = P(1) (2,1) P(2) (2,1)/ P(0) ;
P( s) (2,2) = P(2) (2,2) + P(2) (2,1) P(1) (2,2) P(2) (1,2)/ P(0) ;
71
P( s) (2,3) = P(2) (2,3) + P(2) (2,1)[P(1) (2,3) + P(2) (1,3) P(1) (2,2)/ P(0) ;
P( s) (3,1) = P(1) (3,1) + P(1) (2,1)[P(2) (3,1) + P(2) (1,1) P(1) (3,2)/ P(0) ;
P( s) (3,2) = P(2) (3,2) + P(2) (1,2)[P(1) (3,2) + P(1) (2,2) P2) (3,1)/ P(0) ;
P(s) (3,3) = P(1) (3,3) + P(2) (3,3) + {P(1) (3,2)[P(2) (1,3) + P(2) (1,1) P(1) (2,3)] +
+ P(2) (3,1)[P(1) (2,3) + P(1) (2,2) P(2) (1,3)]}/ P(0) ;
где P(0) = 1 − P(2) (1,1) P(1) (2,2) . Верхние индексы s, 1 и 2 относятся,
соответственно, к суммарной Р'матрице, Р'матрице ПАВ'структу'
ры, находящейся слева, и Р'матрице ПАВ'структуры, находящейся
справа. ПАВ'структурой может быть как отдельный электрод, так и
группа электродов, для которой вычислена суммарная Р'матрица.
Следует отметить, что входную проводимость ВШП определяет
элемент P(s)(3,3) суммарной Р'матрицы.
Приведенные соотношения позволяют рассчитывать входную про'
водимость ВШП в составе фильтра или резонатора с произвольно
меняющимся периодом, апертурой электродов вдоль структуры ВШП,
а также произвольным направлением токов в электродах. Они будут
использованы далее для расчета частотных характеристик резонанс'
ных фильтров (гл. 4) и устройств на основе многополосковых ответ'
вителей (гл. 5).
72
Глава 4
ФИЛЬТРЫ НА ПАВ
4.1. Резонансные фильтры на ПАВ
В последние годы в связи с бурным развитием мобильной связи боль'
шой интерес возник к фильтрам, использующим резонаторы на поверх'
ностных акустических волнах. Основным достоинством таких фильт'
ров являются весьма малые вносимые потери (1–4 дБ) при приемлемом
внеполосном подавлении (25–60 дБ) и малых габаритных размерах.
Данные качества являются весьма привлекательными для использова'
ния фильтров в системах связи, в частности в мобильных телефонах.
Большинство мобильных телефонов ряда стандартов связи (в том числе
GSM, PCS, PCN и т.д.) в качестве элементов частотной селекции ис'
пользуют различные типы резонансных фильтров на ПАВ.
Основными типами резонансных фильтров на ПАВ с малыми вноси'
мыми потерями являются следующие: лестничные фильтры с исполь'
зованием резонаторов на ПАВ, фильтры на поперечно связанных резо'
нансных модах (ПСРМ) и фильтры на продольных резонансных модах.
Каждому из перечисленных выше типов фильтров присущи свои досто'
инства и недостатки.
Основным недостатком лестничных фильтров является сравнитель'
но небольшое внеполосное подавление при отстройке от центральной
частоты на несколько полос пропускания. Фильтры на поперечно свя'
занных резонансных модах могут быть реализованы только на матери'
алах с низким коэффициентом электромеханической связи и поэтому
имеют небольшую относительную полосу частот (не более 0,15%). Кро'
ме того, фильтры на ПСРМ требуют элементов согласования. Фильтры
на продольных резонансных модах имеют справа на частотной зависи'
мости коэффициента передачи «плечо», уровень которого для фильтра,
имеющего два полюса входной проводимости, находится на уровне, –
10…–15 дБ. Поэтому такие фильтры требуют последовательного вклю'
чения двух или трех звеньев, входная проводимость фильтра имеет при
этом 4 или 6 полюсов соответственно.
73
4.1.1. Лестничные фильтры на основе резонаторов на ПАВ
Лестничные фильтры на основе сосредоточенных индуктивностей и
емкостей (LC'элементов) хорошо зарекомендовали себя на сравнитель'
но низких частотах. Ввиду низкой добротности LC'элементов на вы'
соких частотах (в мегагерцовом диапазоне частот) в лестничных филь'
трах используются кварцевые резонаторы на основе объемных акус'
тических волн. Однако реализовать хорошие полосовые свойства в
фильтрах на таких резонаторах можно лишь до частот несколько
десятков мегагерц. Диапазон частот примерно от 100 МГц и выше
(до 3 ГГц) наиболее благоприятен для использования резонаторов на
ПАВ. Поэтому в современных мобильных телефонах этот тип филь'
тра получил наибольшее распространение.
Основой лестничного фильтра являются одновходовые резонато'
ры, каждый из которых имеет вполне определенные статические и
динамические параметры. Эквивалентная схема, описывающая ре'
зонатор с входной проводимостью Y(ω) вблизи резонансной частоты,
состоит из статической емкости С0, динамической емкости СD, дина'
мической индуктивности LD и сопротивления потерь RD (рис. 4.1).
Эквивалентная схема резонатора включает последовательный и
параллельный резонансный контуры; соответственно, резонатор
имеет последовательный и параллельный резонансы. На частоте пос'
ледовательного резонанса проводимость резонатора имеет максималь'
ное значение, а на частоте параллельного резонанса – минимальное.
Поэтому при последовательном включении резонатора в цепь модуль
коэффициента передачи на частоте параллельного резонанса имеет
максимальное значение, а на частоте параллельного резонанса – ми'
нимальное значение (рис. 4.2). При параллельном включении резо'
натора в цепь модуль коэффициента передачи на частоте последова'
тельного резонанса имеет минимальное значение, а на частоте па'
раллельного резонанса – максимальное значение (см. рис. 4.2).
LD
CD
RD
Y
C0
Рис. 4.1. Эквивалентная схема резонатора на ПАВ
74
S 21 , дБ
–5
–10
–15
–20
–25
–30
320
370
420
Частота, МГц
Рис. 4.2. Модуль коэффициента передачи последовательно
и параллельно включенных в цепь резонаторов
Соединение последовательно и параллельно включенных в цепь
резонаторов в виде Г'образного звена (рис. 4.3) дает суммарный ко'
эффициент передачи, напоминающий коэффициент передачи фильт'
ра (рис. 4.4). Следует обратить внимание на тот факт, что для фор'
мирования характеристики, похожей на характеристику фильтра,
соответствующие частоты последовательно и параллельно включен'
ных резонаторов должны быть смещены друг относительно друга
примерно на полосу частот фильтра (см. рис. 4.2).
Элементарным звеном лестничного фильтра, на основе которого
строятся более сложные схемы, являются два Г'образно включен'
ные резонатора с проводимостями параллельного плеча YP и после'
довательного плеча YS (см. рис. 4.3).
Более сложные фильтры, имеющие большее внеполосное подав'
ление, могут быть получены путем последовательного подключения
звеньев типа рис. 4.3, а и рис. 4.3, б в произвольной комбинации.
Параметры резонаторов, включенных в последовательное и па'
раллельное плечи звена, необходимо выбрать так, чтобы реактив'
ные части входного и выходного импеданса звена в полосе пропуска'
ния фильтра были близки к нулю. Активная часть импеданса резо'
наторов RD определяет добротность резонаторов и поэтому крутизну
YS
а)
YP
б)
YS
YP
Рис. 4.3. Элементарное звено лестничного фильтра: a – звено типа «Г»;
б – звено типа«Г»
75
S21, дБ
–5
–10
–15
–20
–25
–30
320
370
420
Частота, МГц
Рис. 4.4. Модуль коэффициента передачи элементарного звена лестничA
ного фильтра и фильтра, состоящего из трех последовательно
включенных звеньев
скатов амплитудно'частотной характеристики и вносимые фильт'
ром потери.
Методы расчета лестничных фильтров на основе LC'резонаторов
хорошо разработаны и позволяют по заданным параметрам фильтра
определить значения индуктивностей и емкостей, а также количе'
ство звеньев в фильтре.
Эквивалентная схема, изображенная на рис. 4.1, описывает как
ПАВ 'резонатор, так и LC'резонатор и поэтому позволяет перейти от
электрических параметров резонатора на LC'элементах к топологи'
ческим параметрам резонатора на ПАВ.
Рассмотрим последовательность определения параметров тополо'
гии резонаторов на ПАВ по заданным частотным свойствам фильтра.
Пусть заданы параметры фильтра: центральная частота F0; полоса
частот ∆Fc = F2c–F1c, где F2c, F1c – верхняя и нижняя частоты среза
фильтра; коэффициент прямоугольности KP = ( F2∞ − F1∞ )/ ∆FC ,
где F2∞ , F1∞ – верхняя и нижняя частоты «бесконечного» затухания,
вносимого фильтром. Последовательность расчета можно предста'
вить в виде следующей схемы:
⎧ CDP ⎫
⎪C ⎪
⎧WP ; NP ;dP ⎫
⎪ 0P ⎪
F0 ; ∆FC ; KP ⇒ ⎨
⎬ синтез ⇒ ⎨
⎬ расчет ⇒ YS ; YP ⇒ S21 (ω).
⎩ WS ; NS ;dS ⎭
⎪ CDS ⎪
⎪⎩ C0S ⎪⎭
На первом этапе на основе методов расчета лестничных LC'фильт'
ров могут быть определены эквивалентные параметры LC'прототипа
для параллельного звена COP, CDP, LDP и последовательного звена
76
COS, CDS, LDS. Используя известное выражение для статической ем'
кости встречно'штыревого преобразователя и динамической емкос'
ти резонатора на ПАВ вблизи резонансной частоты, отношение ста'
тической и динамической емкостей резонатора на ПАВ можно запи'
сать как
2
(4.7)
(CD / C0 ) = 8KЭМ
(h1 ) Nr0 (h2 )/[π2 ( Nr0 (h2 ) + 1)],
2
где K ЭМ(h1) – квадрат электромеханического коэффициента связи;
h1 – толщина электродов; N – число электродов в ВШП; r0(h2) – мо'
дуль коэффициента отражения от полоски или канавки; h2 – высота
полоски или канавки в отражательной структуре. В качестве отра'
жателя в ОС можно использовать не только металлические полоски
(в этом случае h1 = h2), но и канавки, вытравленные на поверхности
пьезоэлектрика.
Коэффициент связи и коэффициент отражения являются функ'
циями толщины электродов ВШП и высоты неоднородности отража'
тельных элементов. Обычно используемые эмпирические аппрокси'
мации зависимостей K2ЭМ(h1) и r0(h2) можно записать в виде
2
2
KЭМ
(h1 ) = KЭМ
(h1 = 0) + ς1 ⋅ (h1 / λ) + ς2 ⋅ (h1 / λ)2 + ...
(4.8)
(4.9)
r0 (h2 ) = r0 (h2 = 0) + r10 ⋅ (h2 / λ) + r20 ⋅ (h2 / λ)2 + ... ,
2
где K ЭМ(h1 = 0) и r0(h2 = 0) – значения параметров при толщине плен'
ки металла h1 и высоте неоднородности h2, равной нулю; λ – длина
волны ПАВ, ζ1, ζ2 и r10, r20 – эмпирические коэффициенты.
Соотношение (4.7) совместно с (4.8) и (4.9) можно рассматривать
как трансцендентное уравнение. Из этого трансцендентного уравне'
ния, задавшись величиной CD / C0 и используя эмпирические или
теоретические зависимости K2ЭМ(h1), r0(h2) для выбранного матери'
ала пьезоэлектрика, необходимо определить параметры топологи'
ческих элементов резонатора h1, h2, N. Уравнение (4.7) с учетом со'
отношений (4.8),(4.9) для некоторых частных случаев может быть
решено аналитически. Однако в общем случае оно требует решения
численными методами с нулевым приближением при h1 = 0, h2 = 0.
В случае h1 ≠ h2 решение (4.7) неоднозначно и окончательный вы'
бор элементов топологии необходимо проводить на основе процеду'
ры оптимизационного анализа при расчете частотных характерис'
тик резонаторов и фильтра, использующего данные резонаторы.
Кроме того, уравнение (4.7) для выбранного пьезоматериала име'
ет решение не для любых сочетаний параметров фильтра ∆FC / F0 и
KP. Поэтому, для того, чтобы уравнение (4.7) имело решение как
для фильтров с относительно узкой, так и широкой полосой ∆FC / F0,
77
необходимо, соответственно, использовать пьезоматериалы как с
низкими, так и с высокими значениями коэффициента K2ЭМ(h).
На рис. 4.5, а и б изображены номограммы, полученные на основе
решения уравнения (4.7). Кривые на рис. 4.5, а описывают возмож'
ные соотношения между ∆FC / F0 фильтра и CD / C0 резонатора для
ряда значений KP в случае, когда в ВШП и ОС используются метал'
лические полоски, т. е. h1 = h2. Номограммы на рис. 4.5 получены
для пьезоэлектрического материала 36° Y,X'среза LiTaO3. На рис.
4.5, б кривые описывают зависимости отношения динамической и
статической емкостей резонаторов от толщины металлической (в дан'
ном случае алюминиевой) пленки электродов ВШП и отражательной
структуры для ряда значений числа электродов ВШП резонатора.
Данные номограммы позволяют выбрать параметры топологии резо'
наторов, входящих в лестничный фильтр.
В лестничном фильтре резонансная частота резонатора последо'
вательного плеча несколько меньше резонансной частоты резонато'
ра параллельного плеча, и решение уравнения (4.7) для резонатора
последовательного плеча дает меньшие величины h1 и h2, чем для
резонатора параллельного плеча. Поэтому уравнение (4.7) следует
решать для параллельного резонатора. Затем, используя получен'
ное значение h, определить параметры последовательного резонатора.
а)
б)
Kp = 3,0
2,6 2,4 2,0
1,6
0,078
N=51
N=301
N=113
C /C O
N=238
D
N=176
0,078
0,071
0,063
0,071
0,063
0,056
0,056
0,048
0,048
CD/C O
2,8
2,2
1,8
1,4
0,041
0,041
0,033
0,033
0,026
1,0 %
3,0 %
Относительная
полоса частот, ∆Fc /Fo
5,0%
0,026
0,07 мкм
0,70%
0,564 мкм
5,61%
1,058 мкм
10,52%
Толщина пленки Al
Рис. 4.5. Номограммы для определения параметров резонаторов на 36°
Y,XAсреза LiTaO3 для использования в составе лестничного фильтра.
(пример расчета для случая ∆
∆FC /F0 = 4,7%, KP = 1,3
показан пунктиром)
78
Перед решением (4.7) необходимо задать начальное приближение
по числу электродов ВШП, уточнение N может быть затем проведено
путем анализа частотных характеристик фильтра на основе уравне'
ний связанных волн (3.43), (3.44), (3.50).
Согласно теории лестничных фильтров резонансная частота резо'
натора из параллельного плеча должна соответствовать частоте F1∞
фильтра, а антирезонансная частота резонатора из последователь'
ного плеча должна соответствовать частоте F2∞ фильтра (см. рис. 4.3).
Кроме того, антирезонансная частота резонатора из параллельного
плеча должна соответствовать резонансной частоте резонатора из
последовательного плеча. Данное требование определяет выбор пе'
риодов ВШП и ОС резонаторов, входящих в фильтр.
Пусть используется ОС в виде металлических полосок, и в резуль'
тате решения уравнения (4.7) определена толщина h1 для резонато'
ра из параллельного плеча и соответствующее число электродов NP0.
Тогда число электродов последовательного резонатора определяется
по соотношению, полученному из (4.7):
2
NS0 = π2 (CD / C0 )S0 /[8KЭМ
(h1 )]/{r0 (h1 ) ×
× [1 − π2 (CD / C0 )S0 /[8KS2 (h1 )]}.
(4.10)
После того, как для каждого резонатора определено число элект'
родов NS0, NP0, по соотношению для статической емкости ВШП мо'
жет быть рассчитана апертура ВШП:
WP = C0 P /(2C2 NP0 ),
(4.11)
WS = C0 P /(2C2 NS0 ),
(4.12)
где C2 – емкость пары электродов на единицу длины.
Максимально возможная относительная полоса пропускания ле'
стничного фильтра определяется максимальной величиной K2ЭМ(h)
в выбранном материале. Для 36° Y,X'среза LiTaO3 максимально реа'
лизуемая величина K2ЭМ(h) ≈ 12% и определяется резким увеличени'
ем потерь на возбуждение объемных волн, начиная с толщины плен'
ки Al h / λ ≈ 8%. Минимальная относительная полоса пропускания
лестничного фильтра определяется максимальной величиной доброт'
ности резонаторов на данном пьезоэлектрическом материале. Для 36°
Y,X'среза LiTaO3 реализуемые полосы частот фильтра составляют
примерно от 1 до 5%. Верхняя и нижняя границы являются услов'
ными, поскольку можно реализовать лестничные фильтры на 36°
Y,X'среза LiTaO3 с полосой рабочих частот как менее 1%, так и более
5%, за счет некоторого ухудшения качества характеристик фильтра.
79
4.1.2. Выбор параметров резонаторов на ПАВ
Обсудим процедуру выбора параметров топологии резонаторов с
помощью номограмм, приведенных на рис. 4.5. Отметим, что при
заданном числе звеньев и полосе пропускания фильтра выбранный
коэффициент прямоугольности определяет уровень внеполосного
подавления.
На первом этапе при заданных ∆FC / F0 и KP определяется отно'
шение CD / C0 для резонатора из параллельной ветви (см. рис. 4.5, а).
Отметим, что выбранные значения должны находиться в поле но'
мограммы. В противном случае фильтр на ПАВ – эквивалент лест'
ничного фильтра нереализуем или, по крайней мере, качественная
характеристика фильтра негарантирована.
Затем, на пересечении линии заданного CD / C0 сплошными лини'
ями для ряда значений числа электродов в резонаторе на ПАВ, мож'
но определить возможные толщины пленки Al – электродов ВШП
и ОС (см. рис. 4.5, б).
В качестве примера на рис. 4.5 показан выбор параметров фильтра
с центральной частотой 392 МГц, полосой ∆FC = 18,5 МГц, ∆FC / F0 = 4,7%
и K P = 1,3. Возможные значения числа электродов ВШП
в резонаторе из параллельного плеча, следующие из рис. 4.5, б для
CD / C0 = 0,0643 в зависимости от толщины пленки Al или из реше'
ния уравнения (4.7) изображены в виде графика на рис. 4.6.
N
351
301
251
201
151
101
51
0,937
0,814
0,691
Толщина пленки Al, мкм
Рис. 4.6. Возможные значения числа электродов ВШП резонатора из
параллельного плеча фильтра и соответствующие им
толщины пленки Al
80
Заштрихованная область на рис. 4.6 определяет область значе'
ний h >0,85 мкм (h / λ>8%), не рекомендуемуемую для использова'
ния ввиду резкого возрастания потерь, связанных с возбуждением
объемных волн. После предварительного (и достаточно произволь'
ного) выбора NP0 по соотношениям (4.10)–(4.12) могут быть рассчи'
таны апертуры резонаторов. Полученные значения h0, NP0, WP0 для
резонатора из параллельного плеча и NS0, WS0 – для резонатора из
последовательного плеча не являются исчерпывающими для расчета
фильтра. Более того, поскольку эти значения получены на основе
упрощенной модели резонатора, справедливой вблизи F0, их жела'
тельно уточнить при сохранении условий NP0 WP0 = const
и NS0 WS 0 = const. Уточнение значений h,N, W с последующим выбо'
ром прочих параметров резонатора возможно на основе более строгой
модели резонатора, учитывающей его распределенный характер. на'
пример, на основе уравнений связанных волн (3.43), (3.44), (3.50).
Для выбранного пьезоматериала максимальная полоса частот при
минимальных вносимых потерях лестничного фильтра определяет'
ся максимально возможным коэффициентом связи K2ЭМ(hmax), зави'
сящим от толщины металла электродов. Для сильных пьезоэлект'
риков типа ниобата и танталата лития K2ЭМ(hmax) определяется мак'
симальной толщиной металлической пленки, при которой уменьше'
ние вносимых потерь за счет увеличения K2ЭМ(h) не компенсируется
их увеличением за счет роста «утечки» и эффективности преобразо'
вания в объемные волны. Так, например, для пьезоматериала 36°
YX'LiTaO3 максимально допустимая толщина пленки алюминия
h ≈8%. Соответственно максимально реализуемая полоса частот
фильтра на этом материале составляет ~ 5%. Этот случай соответ'
ствует ситуации, когда антирезонансная частота резонатора из па'
раллельного плеча совпадает с резонансной частотой резонатора из
последовательного плеча (рис. 4.7). В этом случае фильтр имеет ми'
нимальные потери при минимальной неравномерности частотной ха'
рактеристики в полосе пропускания.
На рис. 4.7 показана частотная характеристика лестничного филь'
тра с электрическими параметрами, упомянутыми выше для пяти
звеньев, включенных в последовательности Г– Г –Г– Г –Г (обозначе'
ние согласно рис. 4.3).
Нормированная входная проводимость определена как
Y1 = 20{log [ Y / G ]}, G = (4/ π) K 2 (h)ω N 2 C . Число электродов в
10
0
0
ЭМ
0
2
ВШП резонатора из параллельного плеча равно 81 при апертуре 37,3
λ0. Число электродов в ВШП резонатора из последовательного плеча
равно 127 при апертуре 17,8 λ0. Отношение периода ОС к полуперио'
81
S21, дБ
~
YP
~
YS
~
Y, дБ
10
–10
0
–15
–10
–20
–20
–25
–30
–30
–40
345
385
425
Частота, МГц
Рис. 4.7. Модуль коэффициента передачи фильтра S21(f) и нормированA
ные входные проводимости резонаторов Y1 = 20{log10 [ Y / G0 ]},
входящих в лестничный фильтр, для полосы частот ∆FC/ F0 = 4,7%
ду ВШП для резонатора из параллельного плеча равно 1,03, а для
резонатора из последовательного плеча – 0,97.Толщина пленки Al
0,85мкм, число отражателей в каждой ОС равно 120, поте'
ри α ' = 10log10 [exp(αλ)] были приняты равными 0,02 дБ / λ.
4.1.3. Резонансный фильтр, использующий
продольные типы колебаний
Другим типом резонансного фильтра, широко применяемого в со'
временных системах связи, является фильтр, использующий для
формирования требуемой частотной характеристики продольные
типы колебаний. В этом типе фильтра используется акустическая
связь между, по крайней мере, двумя продольными типами колеба'
ний.
Конструкция фильтра изображена на рис. 4.8. Она включает один
входной преобразователь ВШП'А и два выходных преобразователя
ВШП'В и ВШП'С. Возможно использование и одного выходного ВШП
вместо двух. Число электродов в преобразователях ВШП'А, ВШП'В
и ВШП'С выбирается так, чтобы примерно с одинаковой эффектив'
ностью возбуждались, по крайней мере, две продольные резонансные
моды (например, 1'я мода и 3'я мода). Для обеспечения оптимально'
го режима возбуждения резонансных мод в полости резонатора по
краям преобразователей ВШП'В и ВШП'С включены отражающие
структуры ОС'В и ОС'С. Зазоры d1, d2 между преобразователями
82
Вход
ВШП'B
ВШП 'A
ВШП 'C
ОС'В
ОС'С
d
Выход 1
d1
d2
d
Выход 2
1'я Мода
3'я Мода
Рис. 4.8. Конструкция фильтра на продольных резонансных модах
и распределение поля первых двух эффективно возбуждаемых мод
в структуре фильтра
ВШП'А и ВШП'В, ВШП'А и ВШП'С, а также зазоры d между преоб'
разователями и отражающими структурами ОС'В, ОС'С выбирают'
ся таким образом, чтобы обеспечить синфазное возбуждение резонан'
сных мод.
Эквивалентную акустоэлектрическую схему фильтра можно пред'
ставить, рассматривая каждый преобразователь в виде устройства с
двумя электрическими и четырьмя акустическими входами (выхода'
ми), как это показано на рис. 4.9. Электрический сигнал с амплиту'
дой UA подается на преобразователь ВШП'А. С выходных преобразо'
вателей фильтра ВШП'В и ВШП'С снимаются напряжения UB и UC,
причем через преобразователи текут токи IA, IB и IC. На преобразова'
тели ВШП'А, ВШП'В и ВШП'С слева падают акустические волны с
комплексными амплитудами RA1, RRB1, RC1 и отражаются акусти'
ческие волны с комплексными амплитудами SA1, SRB1, SC1, а справа
падают акустические волны с комплексными амплитудами SB2, SA2,
SRC2 и отражаются акустические волны с комплексными амплитуда'
ми RB2, RA2, RRC2 соответственно.
Записывая уравнения связанных мод (3.43), (3.44), (3.50) для
каждого электрода преобразователя ВШП'А фильтра и выполняя
последовательное перемножение компонент матриц,1описывающих
A
электроды, можно получить компоненты матрицы P , описываю'
щей преобразователь ВШП'А. Система уравнений для падающих на
преобразователь ВШП'А и выходящих из него волн, имеет вид
83
84
B1
B1
S
R
ОС !B
S
R
RB2
RB2
S
R
B2
B2
S
R
A1
A1
I
A
ВШП !A
A
U
S
R
A2
A2
S
R
C1
C1
C
I
C
ВШП !C
U
S
R
RC2
RC2
B1
B1
B
ВШП'BR
I
U
B
Выход 1
S
B2
R B2
S
R
A1
A1
A
A
ВШП'А
I
U
Вход
S
R
A2
A2
S
R
C1
C1
R
C2
ВШП'CR S C2
C
C
I
U
Выход 2
S
RC1
RC1
R
Рис. 4.10. Преобразованная эквивалентная акустоэлектрическая схема
фильтра
S
I
B
ВШП !B
B
Рис. 4.9. Эквивалентная акустоэлектрическая схема фильтра
RB1
RB1
R
S
R
U
ОС!C
S
R
C2
C2
S A1 (ω)
P( A ) (1,1)
P( A ) (3,1) R A1 (ω)
P( A ) (2,1)
R A 2 (ω) = P( A ) (2,1) P( A ) (2,2) P( A ) (3,2) S A 2 (ω) .
I (ω)
A
P
( A)
(3,1) P
( A)
(2,3) P
( A)
U
(3,3)
(4.13)
A
можно получить системы уравнений (или матрицы
1 Аналогично
1
P B и PC ), описывающих преобразователи ВШП'В и ВШП'С, а так'
же отражательные структуры ОС'В и ОС'С. Выполняя перемноже'
ние компонентов матриц, описывающих ВШП'В и ОС'В, а также
ВШП'С и ОС'С, эквивалентную акустоэлектрическую схему фильт'
ра можно представить в виде, изображенном на рис. 4.10.
Соответствующие эквивалентной акустоэлектрической схеме,
изображенной на рис. 4.10, системы уравнений описывают комплек'
сные амплитуды падающих на преобразователи и выходящих из них
волн, а также комплексные амплитуды токов, текущих через преоб'
разователи. Разрешая системы уравнений относительно неизвестных
токов, можно получить:
⎧ I A = U A Y A + U B Y AB + U C Y AC ,
⎪⎪ B
A BA
B B
C BC
⎨I =U Y +U Y +U Y ,
⎪ C
A CA
B CB
C C
⎪⎩ I = U Y + U Y + U Y ,
(4.14)
где величины YA, YAB, YBC, YBA, YB, YBC, YCA, YCB, YC имеют смысл
проводимостей и находятся из решения систем уравнений вида (4.13).
Эквивалентная электрическая схема фильтра, соответствующая си'
стеме уравнений (4.14), изображена на рис. 4.11.
Y
BC
Вход
Y
Выход 1
Y
B
AB
Y
Y
A
AC
Y
C
Выход 2
Рис. 4.11. Эквивалентная электрическая схема фильтра
85
Используя эквивалентную электрическую схему фильтра и вели'
чины входных проводимостей, определенных из системы уравнений
(4.14), можно рассчитать S'параметры
фильтра и компоненты мат'
1
рицы проводимостей фильтра Y . На рис. 4.12 (кривая 1) изображе'
на амплитудно'частотная характеристика фильтра, выполненного
по топологии рис. 4.8 и включенного в 50'омный тракт так, что вы'
ход 1 и выход 2 соединены. Для сравнения, на рис. 4.12 (кривая 2),
изображена действительная часть проводимости Re{Y11 (f )} фильтра.
Основные параметры топологии фильтра следующие: апертура
ВШП 45 λ0; полупериод преобразователей ВШП'А, ВШП'В, ВШП'С
одинаков и равен 1,03 мкм; преобразователь ВШП'А состоит из 39
электродов, а преобразователи ВШП'В и ВШП'С состоят из 27 элек'
тродов каждый; отражающая структура ОС'В включает 130 элект'
родов, а ОС'С – 90 электродов. Разное число электродов в отража'
тельных структурах ОС'В и ОС'С выбрано для сглаживания пульса'
ций в полосе пропускания фильтра. В соответствии с требуемой по'
лосой рабочих частот фильтра в качестве материала пьезоподложки
используется 42° LiTaO3.
Как видно на рис. 4.12, полюса проводимости Re{Y11 (f )} форми'
руют плоскую вершину коэффициента передачи (S21(f)) в полосе про'
пускания фильтра.
S ,
21
Re{Y },
1
дБ
–5
11
–10
1
Ом
0,40
–15
0,32
–20
0,24
0,16
–25
2
0,08
–30
797
947
Частота, МГц
1097
Рис. 4.12. Модуль коэффициента передачи фильтра (кривая 1) и дейA
ствительная часть компоненты матрицы проводимости Y11 (кривая 2)
фильтра на продольных резонансных модах
86
Фильтр, топология которого приведена на рис. 4.8, а эквивалент'
ная электрическая схема на рис. 4.11, обеспечивает небольшое вне'
полосное подавление (~ –30 дБ при уровне плеча –10…–15 дБ), по'
этому на практике обычно используют не менее двух последователь'
но включенных звеньев такого фильтра. Такой фильтр используется
в мобильных телефонах стандарта GSM.
4.1.4. Фильтры на акустически связанных волноводных модах
в резонаторах на ПАВ
По сравнению с трансверсальными фильтрами на ПАВ, резонанс'
ные фильтры имеют меньшие размеры и вносимые потери при фикси'
рованной полосе рабочих частот.
Одним из наиболее перспективных типов узкополосных фильтров
на ПАВ для использования в аппаратуре различных видов связи яв'
ляется фильтр, использующий волноводные моды в структуре двух
слабо связанных в поперечном направлении резонаторов на ПАВ.
Данный тип фильтров привлекателен тем, что имеет относительно
небольшие вносимые потери при хорошем внеполосном подавлении.
Фильтр включает два связанных резонатора на ПАВ (рис. 4.13),
сформированных на поверхности пьезоэлектрика в параллельных
акустических каналах. Ширина каждого резонатора составляет не'
сколько длин волн, поэтому в структуре возможно существование
типов колебаний с различным распределением поля в поперечном
направлении – волноводных мод. Обмен энергией между двумя резо'
б)
а)
2
1
2
1
в)
Рис. 4.13. Виды слабой связи в резонансных фильтрах: a – электричесA
кая через ВШП; б – электрическая через МПО и ВШП; в – акустическая
через ОС (1 – элемент связи; 2 – ВШП)
87
наторами осуществляется через слабую связь. Слабая связь между
резонаторами может быть электрической, акустической, а также ком'
бинированной. Возможные типы связи включают следующие: через
ВШП (рис. 4.13, а); через многополосковый ответвитель (МПО) (рис.
4.13, б); через наклонные отражательные структуры (рис. 4.13, в).
Наибольшее распространение в последние годы получил фильтр,
у которого слабая связь осуществляется через узкий металлизиро'
ванный зазор G между резонаторами размером порядка длины волны
(рис. 4.14). Акустическое поле вне резонатора (в объеме пьезоэлект'
рика) экспоненциально спадает с расстоянием и частично проникает
в соседний резонатор. Таким образом, связь резонаторов осуществ'
ляется за счет взаимного проникновения акустических полей резо'
наторов, причем, чем на большее расстояние разнесены резонаторы,
тем слабее связь.
Параметры топологии фильтра, т. е. W, G, число электродов в
ВШП и ОС, а также величина зазора S между ВШП и ОС, выбирают'
ся таким образом, чтобы в структуре эффективно возбуждалось, по
крайней мере, две резонансные моды. Структура поля в поперечном
сечении фильтра для первых двух эффективно возбуждаемых попе'
речных мод показана на рис. 4.14.
Точный расчет данного типа фильтров достаточно сложен и опи'
рается на уравнения связанных волн. Качественный анализ можно
провести на основе рассмотрения эквивалентной схемы фильтра,
включающей эквивалентные схемы двух резонаторов, со слабой свя'
зью в виде эквивалентной емкости (рис. 4.15).
Вход
S
2'я Мода
W
G
1'я Мода
Выход
Рис. 4.14. Конструкция резонансного фильтра на слабо связанных
волноводных модах
88
Выход
Вход
Резонатор А
Резонатор В
LD
RD 1
CD
LD 2
1
RD2
CC
C D2
1
Рис. 4.15. Эквивалентная схема резонансного фильтра на слабо связанA
ных волноводных модах
Резонансные частоты резонаторов А и В соответствуют резонанс'
ным частотам первой и второй мод (см. рис. 4.14) и имеют следующие
значения при Cc = 0:
ω01 =
ω02 =
1
;
(4.15, а)
.
(4.15, б)
LD1CD1
1
LD2 CD2
Параметр связи резонаторов определим как
k12 ≈ k21 ≈
CC
.
(4.16)
2 CD1CD2
Тогда резонансные частоты связанных резонансных контуров
1/2
ω1,2
2
⎤
ω + ω02 ⎡⎛ ω01 − ω02 ⎞ ω01 + ω02
2
(1
k
)
= 01
± ⎢⎜
+
±
⎥
12
⎟
2
2
2
⎠
⎢⎣⎝
⎥⎦
.
(4.17)
Таким образом, расстояние между резонансными пиками или по'
лоса частот фильтра определяется величиной связи Cc между резо'
нансными контурами и собственными резонансными частотами мод
в отсутствии связи Cc = 0.
89
Первую, согласно рис. 4.14, возбуждаемую моду назовем симмет'
ричной и присвоим ей индекс s, а вторую – антисимметричной, и на'
зовем a. Соответственно резонансные частоты мод будут ωs и ωa.
Связь параметров топологии резонатора с параметрами эквива'
лентного резонансного контура (рис. 4.15) определяется соотноше'
ниями:
RD =
(1 − Γ )
Ga (fS )(1 + Γ )
LD =
lR Ga (fS )
;
4fS λ S
CD =
1
ω2S LD
,
;
(4.18)
(4.19)
(4.20)
где lR – эквивалентная длина резонансной полости отдельного резо'
натора; Γ – модуль коэффициента отражения от отражательной
структуры; Ga(fS) – акустическая проводимость преобразователя;
λS – длина волны на частоте ωs;
(4.21)
lR = l0 + 2l1 ;
l1 =
λS
,
4( r + α)
(4.22)
где l0 – расстояние между краями отражательных структур; l1 – глуби'
на проникновения поля в отражательную структуру; r – модуль коэф'
фициента отражения от полоски (канавки); α – потери в материале пье'
зоэлектрика. Для кварца ST'среза типичная величина r (h) ≈ 0,0085
–4
и α' = 10 дБ / λ при h / λS≈2%, причем α ' = 10log10 [exp(αλ)].
Реальные значения апертуры отдельного резонатора составляют
W ~ (6…16)λ0. Меньшие значения апертуры резонатора приводят к
резкому увеличению дифракционных потерь и, как следствие, к
уменьшению добротности резонатора и крутизны скатов фильтра.
Большие значения апертуры (W>16λ0) дают слабое расщепление вол'
новодных мод, поэтому частотная характеристика фильтра прибли'
жается к частотной характеристике отдельного резонатора.
На величину расщепления волноводных мод влияет также пара'
метр связи резонаторов, регулируемый расстоянием между резонато'
рами G. Оптимальная связь между резонаторами имеет место при
G~(1…2)λ0. Допустимо использовать G в диапазоне от 0,5λ0 до 3λ0.
На рис. 4.16 изображена амплитудно'частотная характеристика
фильтра, включенного в 50'омный тракт без элементов согласова'
90
а)
б)
S21 min = – 4,8 дБ
S21 min = – 0,8 дБ
S21 , дБ
S21 , дБ
–5
–10
–15
–20
–25
–30
–5
–10
–15
–20
–25
–30
149
150
Частота, МГц
151
149
150
Частота, МГц
151
Рис. 4.16. Модуль коэффициента передачи фильтра на слабо связанных
волноводных модах в несогласованном (а) и в согласованном (б)
режимах
ния (рис. 4.16, а) и с элементами согласования (рис. 4.16, б). Пара'
метры топологии фильтра следующие: число электродов в преобра'
зователях NT = 561, число электродов в отражающих структурах
NR = 200, апертура W = 8,2λ0, ширина полоска связи между резона'
торами G = 1,2λ0, толщина пленки Al 0,016 λ0, где λ0 – длина акусти'
ческой волны на центральной частоте.
Этот тип фильтров может быть реализован только на материалах
с небольшим коэффициентом электромеханической связи. Поэтому
реализуемые относительные полосы рабочих частот фильтра состав'
ляют 0,04…0,14 %.
4.2. Трансверсальные фильтры на ПАВ
Трансверсальные фильтры на ПАВ конструктивно весьма много'
образны. Общим их свойством является тот факт, что частотная ха'
рактеристика фильтра определяется пространственным расположе'
нием и апертурой электродов ВШП. Физически это можно пояснить
следующим образом. Каждый электрод ВШП возбуждает ПАВ, энер'
гия в которой в первом приближении пропорциональна его перекры'
тию с соседним электродом. Поэтому, если на вход преобразователя
ВШП'А подать достаточно короткий видеоимпульс (сигнал, близ'
кий к дельта'воздействию), то на выходе ВШП'А в пьезоэлектри'
ке будет сформирован волновой пакет, пространственное измене'
ние энергии в котором пропорционально функции аподизации элек'
тродов ВШП'А. Если приемный преобразователь ВШП'В имеет ми'
нимальное число электродов (например, два), то его частотная
91
характеристика значительно шире частотной характеристики ВШП'
А, и коэффициент передачи фильтра будет близок к коэффициенту
передачи ВШП'А с точностью до некоторого постоянного множите'
ля. Тогда импульсная характеристика фильтра будет близка к фу'
рье'преобразованию от частотной характеристики ВШП'А с точнос'
тью до некоторого постоянного размерного множителя.
Таким образом, задав требование к форме частотной характерис'
тики фильтра и вычислив обратное преобразование Фурье от нее,
можно получить функцию аподизации электродов ВШП'А, обеспе'
чивающую заданную форму частотной характеристики фильтра.
Поскольку форму АЧХ фильтра определяют оба преобразовате'
ля, то второй преобразователь ВШП'В обычно выбирают малоэлект'
родным, частотная характеристика которого значительно шире час'
тотной характеристики аподизованного ВШП'А и существенно не
влияет на форму АЧХ всего устройства в целом.
В тех случаях, когда с помощью аподизации только в одном ВШП
невозможно реализовать требуемое в фильтре внеполосное подавле'
ние, аподизация используется в обоих ВШП. Однако для того чтобы
результирующий коэффициент передачи фильтра был прогнозируем
и определялся произведением коэффициентов передачи отдельных
ВШП (выраженных в относительных единицах), между двумя ВШП
используется акустическая связь через многополосовый ответвитель
или отражательную структуру. Фильтры такой конструкции будут
рассмотрены позже. Вместе с тем некоторые типы фильтров допуска'
ют использование аподизации в обоих ВШП.
Для расчета трансверсальных фильтров пригоден метод, основан'
ный на физической модели преобразователя и изложенный в подразд.
3.3, 3.4. Этот метод близок к методу дельта'функций. Эффекты вто'
рого порядка, которые имеют место при возбуждении, распростране'
нии и отражении ПАВ от электродов, вносят коррективы в изложен'
ный упрощенный подход. Следует отметить, что метод расчета, ос'
нованный на уравнениях связанных волн (подразд. 3.6) дает, конеч'
но, более точные результаты.
4.2.1. Фильтры с аподизацией sinc(x)
Одним из трансверсальных фильтров, получивших широкое рас'
пространение благодаря возможности реализовать АЧХ, близкую к
прямоугольной, является фильтр с аподизацией электродов ВШП
вида sinc(x). Практически реализованные коэффициенты прямоуголь'
ности у данного типа фильтров достигают значений менее 1,1.
Рассмотрим конструкцию данного фильтра. Пусть требуется
фильтр, имеющий прямоугольную АЧХ в полосе частот ∆f и цент'
92
ральную частоту f0. Выполняя обратное преобразование Фурье от
заданной функции в частотной области, получим требуемую форму
импульсной характеристики фильтра, ее обеспечивающую:
g (t) ~
sin[π∆f (t − t0 )]
cos[2πf0 (t − t0 )].
π∆f (t − t0 )
(4.23)
В (4.23) опущен размерный коэффициент, не принципиальный
для дальнейших рассуждений. Время t может принимать значения
на интервале от –∞ до +∞, величина t0 смещает максимум характери'
стики по оси t. В качестве примера на рис. 4.17 изображена импуль'
сная характеристика идеального фильтра с f0 = 100 МГц и ∆f = 10
МГц, рассчитанная по (4.23) на ограниченном временном интервале.
Можно выделить ряд особенностей импульсной характеристики,
изображенной на рис. 4.17. Период быстрых изменений импульсной
характеристики определяет аргумент второго сомножителя в (4.23).
Вид огибающей импульсного отклика определяет первый сомножи'
тель в (4.23), причем длительность главного лепестка огибающей
равна 2 / ∆f , а прочих боковых лепестков – 1 / ∆f.
Свяжем временное распределение максимумов и минимумов им'
пульсного отклика (4.23) с пространственным (по координате z) рас'
положением электродов ВШП через соотношение
zK = VПАВ tK ,
(4.24)
где zK – координата электрода, соответствующая временному поло'
жению k'го максимума или минимума tK импульсного отклика. Рас'
g(t),
отн. ед.
1,00
0,66
0,33
0,00
–0,33
1/∆ f
–0,66
t0–0,5
t0
t, мкс
t0+0,5
Рис. 4.17. Импульсная характеристика идеального фильтра с f0=100 МГц
и ∆f=10 МГц на временном интервале от t0 –0,5мкс до t0+0,5мкс
93
полагая электроды ВШП, подключенные к верхней шине в максиму'
мах полуволн положительной полярности, а электроды, подключен'
ные к нижней шине, – в минимумах полуволн отрицательной поляр'
ности импульсного отклика (4.23), можно обеспечить пространствен'
ное расположение электродов ВШП, который сможет возбудить по'
добный волновой пакет в пьезоэлектрике. Для обеспечения соответ'
ствия амплитуд максимумов и минимумов в импульсном отклике и
волновом пакете относительную длину электродов WK / W0 следует
выбрать в соответствии с относительной амплитудой максимума или
минимума AK / A0 , где W0 – максимальная апертура ВШП и A0 = 1.
Тогда координаты положения электродов и их апертуру, можно
вычислить следующим образом:
(4.25)
z = KV
/2f ;
K
ПАВ
0
WK = W0 sin(xK )/ xK ,
где xK = 2π∆f
(4.26)
zK − z0
, W0 – максимальная апертура ВШП, выбирае'
VПАВ
мая из условия согласования ВШП с источником сигнала, z0 – коор'
дината центра ВШП.
Импульсная характеристика (4.23) не ограничена во времени,
поэтому ВШП, координаты электродов которого заданы (4.25), дол'
жен содержать бесконечное число электродов. Такой ВШП не реали'
зуем на практике. На практике используют ВШП конечной длины, и
число электродов обычно выбирается таким образом, чтобы импуль'
сная характеристика ВШП содержала от 3 до 20 боковых лепестков.
Следует отметить, что из'за сильного влияния эффектов второго по'
рядка, ВШП с числом боковых лепестков более 5 требуют очень тща'
тельного и громоздкого расчета, учитывающего эффекты дифракции,
переотражений ПАВ в структуре ВШП, затухания и изменения ско'
рости ПАВ под электродной структурой и т.д.
На рис. 4.18, а изображена топология фильтра для f0 = 100 МГц и
∆f = 10 МГц, имеющего ВШП'А, электроды которого аподизованы по
функции sinc(x) при n = 5. На рис. 4.18, б показан и его импульсный
отклик.В преобразователе ВШП'А всего 120 расщепленных элект'
родов, причем в главном лепестке 40, а в каждом боковом по 20 элек'
тродов. Следует обратить внимание на тот факт, что при прохожде'
нии через ноль полярность подключения электродов к шине меняет'
ся на противоположную в соответствии с изменением знака у огиба'
ющей функции sinc(x).
На рис. 4.19 изображены результаты расчета по соотношениям
(3.14), (3.17), (3.19) коэффициента передачи фильтра, преобразова'
94
Поглотитель ВШП'А ВШП'B
а)
б)
g(t),
отн. ед.
0,5
t
(z = t VПАВ )
0,0
'0,5
Рис. 4.18. Топология трансверсального фильтра с аподизацией в виде
sinc(x) и n = 5 (а) ; импульсная характеристика фильтра при n = 5 (б)
S (f0 ) = –9,8 дБ
S21 ,
21
дБ
–5
n=1
–10
n=3
–15
n=5
–20
–25
–30
90
f=10 MHz
100
110
Частота, МГц
Рис. 4.19. Модуль коэффициента передачи трансверсального фильтра с
аподизацией в виде sinc(x) при n = 1, 3 и 5
тель ВШП'А которого аподизован по функции sinc(x), при n = 1, 3 и
5. Из рис. 4.19 видно, что по мере увеличения числа n прямоуголь'
ность АЧХ улучшается, а именно уменьшается неравномерность вер'
шины, увеличивается крутизна скатов характеристики и уменьша'
ется относительный уровень боковых лепестков на АЧХ фильтра.
4.2.2. Конструкции трансверсальных фильтров
В настоящее время существует большое количество различных
конструктивных вариантов трансверсальных фильтров на ПАВ. По'
95
мимо фильтра, представленного в предыдущем разделе, остановимся
еще на трех конструктивных исполнениях трансверсальных фильт'
ров.
Первый из них это фильтр, использующий преобразователи дис'
персионного типа (рис. 4.20). Несмотря на то, что преобразователи
фильтра являются дисперсионными, сам фильтр является недиспер'
сионным и имеет линейную фазочастотную характеристику. Более
того, основным достоинством фильтра данной конструкции являет'
ся возможность получить фазочастотную характеристику с очень
небольшими отклонениями от линейного закона (или независящую
от частоты задержку сигнала в полосе рабочих частот фильтра).
Другим достоинством фильтра данной конструкции является воз'
можность получить АЧХ, близкую к прямоугольной с небольшой
неравномерностью вершины. Возможные значения относительной
полосы рабочих частот фильтра данной конструкции составляют от
единиц процентов до более чем 100 %.
Еще одной популярной конструкцией трансверсального фильтра,
обеспечивающей высокую прямоугольность АЧХ, является фильтр
на основе преобразователей веерного типа (рис. 4.21). Этот тип филь'
тра также позволяет реализовать широкий диапазон значений отно'
сительных полос пропускания. Его достоинством являются относи'
тельно небольшие вносимые потери и значения коэффициента пря'
моугольности АЧХ, близкие к 1. Кроме того, благодаря простран'
ственному разделению областей возбуждения волн с различными ча'
стотами в полосе пропускания фильтра (см. рис. 4.21), данный тип
фильтра имеет небольшие искажения АЧХ, связанные с паразитны'
ми переотражениями в ВШП и возбуждением объемных волн.
Весьма популярной конструкцией узкополосного трансверсаль'
ного фильтра является фильтр, использующий ВШП с селективным
ВШП'А
Вход
ВШП'B
Выход
Рис. 4.20. Конструкция фильтра на основе дисперсионных ВШП
(ВШП показаны условно)
96
Вход
Выход
ВШП'B
ВШП'А
f1
f2
f3
Рис. 4.21. Конструкция фильтра на основе ВШП веерного типа
удалением электродов (рис. 4.22). Функция аподизации в ВШП реа'
лизуется не через изменение апертуры электродов, а через удаление
части электродов, т. е. плотность электродов ВШП меняется в соот'
ветствии с функцией аподизации.
Конечно, для реализации желаемой функции аподизации с при'
емлемой точностью число электродов в ВШП должно быть достаточ'
но большим, по крайней мере, более 100. Поэтому на данном типе
фильтра можно получить хорошие параметры только при относи'
тельно небольшой полосе рабочих частот фильтра – менее процента.
В соответствии с полосой рабочих частот фильтры с селективным уда'
лением электродов ВШП реализуются на материалах с небольшим
коэффициентом электромеханической связи типа пьезокварца. Дос'
тоинством данного типа фильтров является тот факт, что он допус'
кает использование аподизации в обоих ВШП. Предпочтительными
значениями полосы рабочих частот фильтров с селективным удале'
нием электродов является значения ∆f / f0 от 0,15% до 1%. Нижняя
граница значений ∆f / f0 определяется конкуренцией с резонансны'
Вход
ВШП'А
Выход
ВШП'B
Рис. 4.22. Конструкция фильтра на основе ВШП
с селективным удалением электродов
(реальная топология фильтра f0 = 45 МГц и ∆ f = 0,25 МГц)
97
ми фильтрами, имеющими меньшие потери, а верхняя граница опре'
деляется возможностью реализации качественных характеристик у
данного типа фильтров.
Все многообразие трансверсальных фильтров не исчерпывается
рассмотренными выше конструкциями, однако, проанализировав их
работу, несложно разобраться и в принципах функционирования
многих других фильтров.
98
Глава 5
МНОГОПОЛОСКОВЫЙ ОТВЕТВИТЕЛЬ
И УСТРОЙСТВА НА ЕГО ОСНОВЕ
Многополосковые ответвители, наряду с встречно'штыревыми
преобразователями и отражательными структурами, являются ос'
новными элементами, на базе которых построено большинство пас'
сивных устройств на ПАВ. В данном разделе изложен принцип дей'
ствия и основные характеристики МПО, а также рассмотрен ряд уст'
ройств на ПАВ, использующих МПО.
5.1. Принцип работы МПО
Конструкция многополоскового ответвителя была предложена
Маршаллом и Пейджем в 1971 году и представляла решетку парал'
лельных и изолированных друг от друга металлических электродов
постоянного периода, расположенную на поверхности пьезоэлект'
рика (рис. 5.1, а).
Предполагается, что с одной стороны на решетку падает плоская
поверхностная волна, фронт которой параллелен электродам, при'
чем фронт волны падает только на часть полной апертуры МПО. Об'
ласть падения ПАВ обозначена на рис. 5.1, а как канал 1. Другая
часть МПО, на которую не падает ПАВ, расположена в канале 2. Как
было установлено, такое многополосковое устройство способно пе'
рераспределять падающую в канале 1 мощность ПАВ между канала'
ми 1 и 2 в требуемой пропорции.
МПО в устройствах на ПАВ может выполнять следующие функ'
ции:
– смещение потока акустической мощности;
– элемента конструкции полосового фильтра, позволяющего вво'
дить весовую обработку как в возбуждающий, так и в приемный пре'
образователи, что улучшает полосовые свойства фильтра (коэффи'
циент прямоугольности, внеполосное подавление и т. д.);
– улучшение полосовых свойств фильтра за счет частотной изби'
рательности самого МПО;
99
МПО
а)
ВШП
Канал 1
An
б)
Bn
ВШП
0,80
Выход 1
0,60
0,40
Вход
Выход 2
Канал 2
ВШП
0,20
0
Nc
2 Nc n
Рис. 5.1. Устройство многополосокового ответвителя (а) и изменение
модулей комплексных амплитуд волн на выходе канала 1 ( An ) и
канала 2 ( Bn ) (б) при изменении числа полосок МПО
– подавление объемных акустических волн, возбуждаемых преоб'
разователем и приводящих в фильтрах на ПАВ к появлению пара'
зитных откликов на частотных и импульсных характеристиках;
– на основе МПО возможно создание делителей и сумматоров мощ'
ности с различными пропорциями;
– уменьшение апертуры акустического луча (увеличение ампли'
туды ПАВ или плотности мощности ПАВ в кристалле).
Принцип работы МПО основан на прямом и обратном пьезоэффек'
те. Поверхностная акустическая волна, распространяющаяся под
электродами МПО, взаимодействует с ними подобно взаимодействию
с электродами приемного ВШП. Переменный заряд, наводимый на
электродах в области канала 1, растекается по всему электроду и, в
свою очередь, возбуждает вторичную ПАВ в канале 2 подобно воз'
буждающему ВШП. Растекание заряда по электроду происходит со
скоростью электромагнитной волны, которая гораздо больше акус'
тической, поэтому фронт возбуждаемой акустической волны плос'
кий. Подобное возбуждение вторичной ПАВ происходит на каждом
электроде МПО. Поскольку возбуждаемые каждым электродом вто'
ричные ПАВ синфазны, то амплитуда вторичной ПАВ возрастает по
мере распространения ПАВ под МПО. Условие нарастания суммар'
ной вторичной акустической волны выполняется в широком диапа'
зоне частот падающих ПАВ, поэтому МПО – широкополосное уст'
ройство. Со стороны высоких частот широкополосность МПО ог'
раничена полосовыми свойствами отдельного электрода, посколь'
100
ку по мере укорочения длины волны начинает сказываться несин'
фазность возбуждения ПАВ различными сегментами поверхност'
ного тока на ширине полоски (в направлении распространения
ПАВ).
Нарастание вторичной ПАВ в канале 2 ограничено энергией па'
дающей ПАВ. В случае каналов одинаковой ширины, а также от'
сутствия потерь в материале звукопровода и электродах МПО, а
также преобразования в другие типы волн, максимальная ампли'
туда вторичной ПАВ будет равна амплитуде падающей ПАВ, при
этом амплитуда падающей ПАВ в МПО будет равна нулю.
Следует отметить, что полная перекачка энергии из одного ка'
нала в другой возможна из'за фазового сдвига между волнами, рас'
пространяющимися в каналах 1 и 2.
По достижении такой ситуации в МПО, когда вся энергия из
канала 1 перейдет в канал 2, при дальнейшем распространении
ПАВ в МПО начнется обратный процесс перекачки энергии из ка'
нала 2 в канал 1. Зависимости величины выходного сигнала в ка'
налах 1 и 2 от числа электродов в МПО показаны на рис. 5.1, б.
5.2. Частотные характеристики МПО
Рассмотрим прохождение ПАВ через МПО, представляющий со'
бой периодическую последовательность из N разомкнутых элект'
родов с периодом p и постоянной апертурой W0 (см. рис. 5.1, а).
Условно разобьем МПО на две неравные части линией, перпен'
дикулярной краю полосок. Верхнюю часть МПО определим как ка'
нал 1, а нижнюю – как канал 2. Пусть на часть МПО
(в канале 1) падает плоская монохроматическая поверхностная
волна A (z, κ) = A0 ( κ)exp(− jκz) с комплексной амплитудой A0(κ).
С учетом процессов прохождения, отражения, прямого и обрат'
ного преобразования ПАВ на полосках комплексные амплитуды
волн, прошедших через первую полоску, и волн, преобразованных
на первой полоске, можно выразить через комплексные амплиту'
ды волн на входе каждого из каналов (рис. 5.2). Положим комп'
лексные амплитуды волн на входе первой полоски
(5.1)
A1+ (z1, κ E ) = 1, B1+ (z1, κ E ) = 0.
Тогда комплексные амплитуды отраженных и прошедших волн:
{
A2+ (z2 , κ E ) = A1+ (z1, κ E ) ⎡⎣ζ1+ ( κ E ) + ηa ξ1+ ( κ E ) ⎤⎦ +
}
+ B1+ (z1 , κ E )ηa ξ1+ ( κ E ) exp(− jκ E p);
(5.2)
101
{
B2+ (z2 , κ E ) = B1+ (z1, κ E ) ⎡ζ1+ ( κ E ) + ηb ξ1+ ( κ E ) ⎤ +
⎣
⎦
}
+ A1+ (z1, κ E )ηb ξ1+ ( κ E ) exp( − jκ E p);
{
(5.3)
B1− (z1 , κ E ) = B1+ (z1 , κ E ) ⎡⎣r1 ( κ E ) + ηb ξ1− ( κ E ) ⎤⎦ +
}
+ A1+ (z1, κ E )ηb ξ1− ( κ E ) exp(+ j κ E p),
(5.4)
где κE – эффективное волновое число ПАВ в структуре МПО; p – пери'
од структуры; коэффициенты ζ1+ ( κ E ) и ζ1− ( κ E ) определяют уменьше'
ние амплитуды волны при ее прохождении под электродом за счет
частичного преобразования и отражения ПАВ; коэффициенты ξ1± ( κ E )
определяют эффективность прямого (или обратного) преобразования
ПАВ; ηa = Wa / W0 , ηb = Wb / W0 , W0 – полная апертура электродов
МПО. Центр отражения и преобразования ПАВ принят находящим'
ся в центре электрода zck.
Зная комплексные амплитуды A2+ (z2 , κ E ), B2+ (z2 , κ E ) , аналогично
можно вычислить комплексные амплитуды волн в области второго и
последующих электродов МПО.
Запишем комплексные амплитуды волн в области k–го электрода
МПО:
{
Ak++1 (zk +1, κ E ) = Ak+ (zk , κ E ) ⎡⎣ζ k+ ( κ E ) + ηa ξk+ (κ E ) ⎤⎦ +
}
+ Bk+ (zk , κ E )ηa ξk+ ( κ E ) exp(− jκ E p);
(5.5)
p
a
+
A
B
–
k
B
Wa
A k+1
k
B k+1
W0
Wb
+
k
Zk
Z ck
Z k+1
Z
Рис. 5.2. Падающие и прошедшие волны в области kAй полоски МПО
102
{
Bk++1 (zk+1 , κ E ) = Bk+ (zk , κ E ) ⎡ ζ k+ ( κ E ) + ηb ξk+ ( κ E ) ⎤ +
⎣
⎦
}
+ Ak+ (zk , κ E )ηb ξk+ ( κ E ) exp(− jκ E p);
(5.6)
{
Bk− (zk , κ E ) = Bk+ (zk , κ E ) ⎡rk ( κ E ) + ηb ξk− ( κ E ) ⎤ +
⎣
⎦
}
+ Ak+ (zk , κ E )ηb ξk− ( κ E ) exp(+ jκ E p);
(5.7)
{
Ak− (zk+1, κ E ) = Ak+ (zk , κ E ) ⎡⎣rk ( κ E ) + ηa ξk− ( κ E ) ⎤⎦ +
}
+ Bk+ (zk , κ E )ηa ξk− ( κ E ) exp(+ jκ E p),
(5.8)
где
ζ k± ( κ E ) = 1 − [rk ( κ E )]
2
2
1 − ⎡⎣ ξk± ( κ E ) ⎤⎦ ,
(5.9)
rk – комплексный коэффициент отражения от k'й полоски.
Параметр ξk± ( κ E ), определяющий эффективность прямого и обрат'
ного преобразования ПАВ на электродах МПО, найдем, используя
выражение для потенциала, создаваемого поверхностным током в
k'м электроде ϕ±K (z, κ E ). Согласно (3.45):
ϕk± (z, κ E ) =
1
iω
Zk+1
∫
GR± (z − z0 , κ E ) J (z0 , κ E )dz0 ,
(5.10)
Zk
где GR± (z − z0 , κ E ) – составляющая функции Грина пьезоэлектричес'
кого полупространства, связанная с ПАВ; J(z0,kE) – плотность по'
верхностного тока в электродах МПО, которая может быть найдена
из решения интегрального уравнения. В пренебрежении влиянием
поля распространяющихся под электродами МПО волн
( J (z, κ E ) ⇒ J (z) ) решение интегрального уравнения есть
N
J (z) = ∏
QN −1 (z)
,
(5.11)
− z)
где QN −1 (z)
– алгебраический полином
степени не выше N–1, коэффициенты которого находятся из усло'
вия на величину суммарных токов, протекающих через электроды
k =1 (z − ak )(bk
= CN −1z N −1 + CN −2 zN −2 + ... + C0
МПО: Ik =
bk
∫ J(z)dz = 0. Выражение (5.11) не учитывает влияние элек'
ak
103
трического поля ПАВ, однако учитывает влияние электрического
поля токов в соседних электродах на распределение J(z). С хорошей
точностью, вполне достаточной для большинства практических вы'
числений, можно пренебречь влиянием полей токов в соседних по'
лосках. Тогда относительная плотность тока в каждой полоске МПО
будет описываться выражением
Jk (z) ≈
C1 (z − zck )
(z − ak )(bk − z)
,
(5.12)
⎡1⎤
где ak<z<bk; постоянная C1 имеет размерность ⎢ ⎥ и определяется
⎣м⎦
амплитудой падающей на электрод ПАВ.
Подставляя функцию Грина (3.6, а) в (5.10), получим
ϕk± (z, κ E ) = ξk± ( κ E )exp[± jκ E (z − zck )]U0 ,
(5.13)
причем
ξk± (κ E ) = jκ2ЭМ Jk ( κ E ), [отн.ед.],
(5.14)
где фурье'компонента поверхностного тока в электроде МПО
p /4
Jk ( κ E ) ≈ C1
∫
− p /4
z exp( − j κz)dz
z2 − ( p /4)2
, [отн.ед.].
(5.15)
Центр полоски шириной p / 2 принят расположенным при z = 0, где p –
период МПО.
Следует подчеркнуть, что частото'зависимый параметр ξk± ( κ E ) , по
существу, определяет вид частотной характеристики МПО.
Расчет по рекуррентным соотношениям (5.5) – (5.8) с учетом (5.9)
и (5.14) приводит к зависимостям для числа электродов, обеспечива'
ющих полную передачу энергии ПАВ из канала 1 в канал 2, вида,
приведенного на рис. 5.3. На рис. 5.3 частота
fc = VПАВ / (2p)
(5.16)
есть центральная частота полосы непропускания (режекции) МПО.
Частотные зависимости модулей коэффициентов передачи с входа
канала 1 на выходы канала 1 (S12) и канала 2 (S14) приведены на
+
+
+
+
рис. 5.4, причем S12 = AN / A1 , S14 = BN / A1 .
На практике наибольшее распространение получили два типа
МПО. Первый из них обеспечивает полную передачу мощности из
канала 1 в канал 2, а второй – осуществляет деление мощности меж'
ду каналами на две равные части.
104
N/N
C
1,4
1,2
1,0
0,5
1,5
1,0
f/f
C
Рис. 5.3. Зависимость числа электродов, обеспечивающих полную
передачу мощности из канала 1 в канал 2 от относительной частоты
падающей ПАВ
0,90
S12
0,70
N=NC/2
0,50
0,30
N=NC
S14
0,10
0,0
1,0
f / fC
2,0
Рис. 5.4. Модули коэффициентов передачи мощности МПО с входа
канала 1 на выход канала 1 (S12 ) и на выход канала 2 (S14 ) при двух
значениях числа полосок
105
1. МПО с полной передачей мощности из канала 1 в канал 2.
В этом случае число электродов в МПО должно быть
Nc ≈ 2,32
2
κ2ЭМ
.
(5.17)
2. 3 дБ'МПО – делитель мощности между каналом 1 и каналом 2
на две равные части.
В этом случае число электродов в МПО должно быть
N3дБ ≈ Nc /2.
(5.18)
Выражения (5.17) и (5.18) дают хорошую точность вычисления,
если центральная частота полосы рабочих частот устройства f0 близ'
ка к центральной частоте полосы непропускания (режекции) МПО
fc. В случае, когда требуется широкая рабочая полоса устройства и fc
заметно отличается от f0, необходимо учитывать частотные свойства
полосок МПО. В этом случае
Nc ( κ E ) ≈ 2,32
2
1
κ2ЭМ Jk2 ( κ E )
.
(5.19)
Максимум функции Jk(κE), определяемой выражением (5.15), рас'
положен вблизи κ E ≈ π/ p, соответственно, минимальное число по'
лосок в ПМО требуется при выборе p ≈ VПАВ /(2f0 ). Однако при таком
выборе p центральная частота устройства совпадает с частотой ре'
жекции МПО (см. рис. 5.4).
Реальный диапазон рабочих частот МПО составляет от (0,3…0,9)
fc. Типичное значение частоты fc у МПО – fc ≈ 1,3f0 , где f0 – централь'
ная частота ПАВ'устройства. При этом ширина электродов МПО рав'
на 3 / 16λ0, где λ0 – длина волны на f0.
Наиболее подходящими материалами для применения МПО яв'
ляются материалы с большим коэффициентом электромеханической
связи, а тип волны – рэлеевская. Например, для ниобата лития YZ'
среза Nc ≈ 130 , что вполне приемлемо для практического использо'
вания. В отличие от ниобата лития, для такого материала, как кварц,
число полосок в МПО составит несколько тысяч. При таком числе
полосок существенны эффекты второго порядка. Наиболее суще'
ственными эффектами второго порядка являются следующие:
– резистивные потери в металлических полосках;
– переизлучение ПАВ в объемные волны;
– дифракционные потери (потери на расходимость акустического
луча).
Наиболее существенным источником потерь из вышеперечислен'
ных является первый. Эффекты второго порядка приводят к дегра'
106
дации частотных характеристик МПО. Поэтому на материалах с низ'
ким значением κ2ЭМ , таких как кварц, МПО не используются.
5.3. ПАВAустройства на основе МПО
5.3.1. Трансверсальный фильтр на основе МПО с полной
передачей мощности
В трансверсальных фильтрах, состоящих из двух ВШП и исполь'
зующих аподизацию типа sin(x) / x только в одном ВШП, основные
параметры, такие как коэффициент прямоугольности, неравномер'
ность коэффициента передачи в полосе рабочих частот, внеполосное
подавление и т. д., зависят от числа лепестков n функции sin(x) / x,
реализованных в преобразователе. При этом значение n ограничено
дифракционными эффектами, связанными с уменьшением весовых
коэффициентов для электродов по мере удаления от главного лепест'
ка функции sin(x) / x, а также дисперсией скорости ПАВ в пьезоэ'
лектрической среде, нагруженной электродами ВШП. Для компен'
сации дифракционных искажений в весовые коэффициенты электро'
дов необходимо вводить поправки, а учет дисперсии ПАВ предпола'
гает корректировку положения каждого электрода ВШП. Вместе с
тем отмеченные меры не всегда оказываются успешными.
Улучшить полосовые свойства фильтра можно, если провести ве'
совую обработку типа sin(x) / x в обоих преобразователях. Однако во
втором преобразователе обычного трансверсального фильтра, как
правило, не проводят амплитудное взвешивание, поскольку резуль'
тирующий коэффициент передачи фильтра не будет равен произведе'
нию коэффициентов передачи первого и второго ВШП.
Одним из способов избежать подобных трудностей является весо'
вая обработка селективным удалением электродов ВШП. Однако
она дает хорошие результаты только при достаточно большом числе
электродов в ВШП и поэтому применяется, в основном, в узкополос'
ных устройствах, использующих материалы с небольшим коэффи'
циентом связи, такие как кварц.
В материалах с большим коэффициентом связи, таких как ниобат
лития, для того чтобы иметь возможность проводить весовую обра'
ботку в обоих ВШП фильтра, используется МПО с полной передачей
мощности (рис. 5.5). В этом случае коэффициент передачи трансвер'
сального фильтра равен произведению коэффициентов передачи каж'
дого из ВШП (3.20) и коэффициента передачи МПО. В логарифми'
ческих единицах для модуля коэффициента передачи фильтра в этом
случае будем иметь
107
Вход
ВШП'1
МПО
+
A1
+
A2
+
B2
ВШП'2
Выход
Рис. 5.5. Трансверсальный фильтр с двумя аподизованными
ВШП и МПО
A (ω) = AВШП'1 (ω) + AВШП'2 (ω) + AМПО (ω), дБ.
(5.20)
Расчет вносимых преобразователями потерь AВШП'1 (ω)
и AВШП'2 (ω) был рассмотрен ранее (см. подразд. 3.3). Для практичес'
ких расчетов фильтров типа, приведенного на рис. 5.3, модуль коэф'
фициента передачи МПО AМПО (ω) можно принять равным –1…–2 дБ.
Для точных расчетов следует воспользоваться соотношениями (5.5)–
(5.9).
Дополнительным преимуществом фильтров с МПО является по'
давление паразитных откликов, появляющихся на эксперименталь'
ных частотных характеристиках фильтров и обусловленных возбуж'
дением электродами ВШП фильтра объемных типов волн.
Следует отметить, что для улучшения частотных характеристик
фильтра число боковых лепестков функции sin(x) / x, реализован'
ных в первом и втором ВШП, должно быть различным.
5.3.2. Однонаправленный преобразователь на основе МПО
Недостатком обычных встречно'штыревых преобразователей на
ПАВ является их двунаправленность, т. е. возбуждаемые ими ПАВ
распространяются как вправо, так и влево от ВШП с одинаковой
амплитудой. Поскольку приемный преобразователь расположен толь'
ко с одной стороны, то половина мощности сигнала теряется. В силу
взаимности процессов возбуждения и приема ПАВ при приеме иде'
ально согласованный с трактом ВШП преобразует только половину
падающей на него мощности. Таким образом, минимальные потери
на преобразование в фильтре с обычными ВШП в случае идеального
согласования с внешними цепями и отсутствия прочих источников
потерь составляют 6 дБ.
108
Существует ряд практических конструкций фильтров, в которых
устранен данный недостаток ВШП. В одной из них используется че'
редование возбуждающих и приемных ВШП, расположенных в од'
ном акустическом канале, чем достигается существенное уменьше'
ние потерь на двунаправленность ВШП. В другом типе фильтра ис'
пользуется связь возбуждающего и приемного ВШП, расположен'
ных один под другим в параллельных акустических каналах и свя'
занных через два МПО, находящиеся справа и слева от ВШП и пере'
излучающие ПАВ в параллельный канал с поворотом направления
распостранения на 180 градусов.
Особый интерес для использования в фильтрах с небольшими по'
терями представляют преобразователи, обладающие разной эффек'
тивностью возбуждения ПАВ во взаимно противоположных направ'
лениях, перпендикулярных электродам. Один из вариантов преоб'
разователей такого типа, использующий U'образный МПО, изобра'
жен на рис. 5.6.
Преобразователь включает широкополосный (малоэлектродный)
ВШП и изогнутый в виде латинской буквы U многополосковый от'
ветвитель с числом электродов, обеспечивающим половинную пере'
дачу мощности из канала 1 в канал 2. Поскольку МПО изогнут и
каналы 1 и 2 совмещены, то результирующий сигнал, например, спра'
+
ва от ВШП равен сумме сигналов канала 2 МПО ( Am
) и ослабленного
+
сигнала от ВШП ( Ab ), прошедшего через МПО справа. Аналогично
−
сигнал слева от ВШП равен сумме сигналов канала 1 МПО ( Am
)и
ослабленного сигнала от ВШП, прошедшего через МПО слева ( Ab− ).
Положение ВШП внутри МПО устанавливается таким образом, что
Wc /2
Канал 1
W
+
+
B 2A
Ab
Канал 2
A1
A+
1
A+b
B
b
0
+
Am
Am
d1
d2
Рис. 5.6. Однонаправленный преобразователь
на основе МПО с делением мощности
109
на центральной частоте устройства сигналы, например, справа от
+
преобразователя Am
и Ab+ находились бы в противофазе, т. е. ком'
+
пенсировали друг друга B+ = Am
+ Ab+ ≈ 0, а сигналы слева от преобра'
−
и Ab− находились бы в фазе, т. е. имело бы место увели'
зователя Am
чение суммарной амплитуды сигнала B− ≈ 2 Ab− . Следует отметить,
+
−
что сигналы, ответвленные МПО Am
и Am
, отстают по фазе на λ / 4
относительно сигналов Ab+ и Ab− , что соответствует дополнительно'
му фазовому множителю exp(− jπ /2) = − j. Тогда, сдвинув сигналы от
ВШП слева +λ / 4 и справа на –λ / 4, можно обеспечить требуемое
условие. Учитывая, что
Ab+ = A1 / 2 exp( jθ2 ), Ab− = A1 / 2 exp( jθ1 ),
+
−
Am
= − jA1 / 2 exp( jθ1 ), Am
= − jA1 / 2 exp( jθ2 ),
+
−
где θ1 = κ0 d1 + Np, θ2 = κ0d2 + Np, θ2 − θ1 = π /2, A1 = A1 = A1 , можно
получить
B− =
A1
2
[exp( jθ1 ) − j exp( jθ2 )] = exp( jθ1 )
B+ =
A1
2
[exp( jθ2 ) − j exp( jθ1 )] = 0.
2
2
A1 ;
(5.21)
(5.22)
Частота, МГц
55
60
70
80
0
S 21, S11,
дБ
–10
–20
S 21
S11
–30
–40
Рис. 5.7. Коэффициенты отражения S11 и преобразования S21 фильтра
на однонаправленных преобразователях, выполненного на ниобате
лития YZAсреза при числе электродов в ВШП, равном 15
110
Таким образом, слева от ВШП амплитуда ПАВ возрастает в 2
раз, а справа ≈ 0. Однако условие θ2 − θ1 = π /2 можно выполнить толь'
ко на одной частоте, поскольку длина волны меняется с частотой.
Частотные характеристики фильтра, выполненного на ниобате
лития YZ'среза и включающего два однонаправленных преобразова'
теля, показаны на рис. 5.7. Вносимые фильтром потери составляют
около 3 дБ. Каждый из преобразователей состоит из 15 электродов
апертурой 108 длин волн. МПО имеет 65 электродов и fc = 86 МГц.
Сигнал тройного прохода связан с отражением части падающей на
преобразователи мощности и обусловлен неидеальной однонаправ'
ленностью преобразователя в широкой полосе частот. Как видно из
рис. 5.7 данный тип преобразователя обладает хорошей направлен'
ностью в полосе рабочих частот устройства не более 10%.
5.3.3. Многополосковое «зеркало» для одновходовой линии
задержки
Многополосковый ответвитель с числом электродов, обеспечива'
ющим деление мощности, поступающей на вход одного из каналов
примерно на две равные части, и изогнутый так, что оба канала МПО
находятся в одном акустическом канале, выполняет функцию широ'
кополосного отражателя с коэффициентом отражения, близким к
единице (рис. 5.8). Такой МПО часто называют многополосковым
«зеркалом». Полоса рабочих частот многополоскового «зеркала» со'
ставляет ~ 60% при вносимых потерях ~ 2 дБ. Он используется в
фильтрах и линиях задержки (см. рис. 1.6).
Рассмотрим прохождение ПАВ амплитудой A+ через МПО. Заме'
тим, что деление мощности пополам соответствует уменьшению ам'
A+
+
B
A
B=0
d
Рис. 5.8. Многополосковое «зеркало» на основе 3дБAМПО
111
плитуды в 1/ 2 раз. Суммируя волны, проходящие через МПО и пе'
редаваемые МПО с учетом фазовых набегов, получим
A− =
A+
−j A+
1
[
exp( jθ)] +
[− j
exp( jθ)] = − j exp( jθ) A + ,
2 2
2
2
B+ =
1
2
[
A+
2
exp( jθ)] −
j
2
[− j
A+
2
exp( jθ)] = 0,
(5.23)
(5.24)
где θ = κd + 2Np.
Таким образом, устройство, изображенное на рис. 5.8, меняет на'
правление распространения ПАВ на противоположное, т. е. являет'
ся отражателем с коэффициентом отражения, близким к 1.
5.3.4. Многополосковое «зеркало» для линии задержки
с раздельными входом и выходом
Многополосковое «зеркало» представляет собой два U'образных
МПО, размещенных в параллельных акустических каналах и свя'
занных через обычный МПО с числом полосок, обеспечивающим по'
ловинную передачу мощности (рис. 5.9). Использование данной ком'
бинации многополосковых ответвителей в ЛЗ позволяет уменьшить
ее длину в два раза.
Пусть на вход канала 1 падает плоская волна с комплексной амп'
литудой A1+ . С учетом половинной передачи мощности из канала 1 в
канал 2 и полного отражения ПАВ от U'образного МПО, амплитуды
d
+
A1
Канал 1
+
A2
A2
Канал 2
B
B1
+
2
B2
Рис. 5.9. Отражатель с передачей отраженной мощности из канала 1 в
канал 2
112
волны A2+ , прошедшей через МПО в канале 1 и волны B2− , отражен'
ной от U'образного МПО в канале 2: A2+ =
A1+
, B2− = − j
A1+
.
2
2
Если пренебречь источниками потерь, обусловленных эффектами
второго порядка, то A2− = A2+ , B2− = B2+ .
Тогда, суммируя парциальные волны на выходе каналов 1 и 2,
получим B1− = A1+ , A1− = 0.
Таким образом устройство, приведенное на рис. 5.9, осуществля'
ет передачу мощности из канала 1 в канал 2 и меняет направление
распространения ПАВ на противоположное.
5.3.5. МПО с уменьшением апертуры акустического луча для
акустоэлектронного конвольвера
МПО с каналами разной ширины и одинаковым периодом поло!
сок. В случае если в МПО используются каналы разной ширины, то
число полосок, необходимое для максимальной передачи мощности
из одного в другой канал, не меняется. При этом максимально воз'
можная передаваемая из канала А в канал В мощность уменьшается
и равна:
max{Pвых / Pвх } =
4Wa Wb
(Wa + Wb )2
(5.25)
Число полосок, необходимое для максимальной передачи мощно'
сти из канала в канал, как и для случая МПО с равными апертурами
каналов, равно NC.
МПО с каналами разной ширины и оптимальной разницей пери!
одов полосок в каналах. Для полной передачи мощности из канала А
в канал В в МПО с разной апертурой каналов период электродов в
каналах должен быть разным (рис. 5.10). Разность между периода'
ми расположения полосок в каналах А и В задается отношением их
апертур
pa − pb =
Wa − Wb
π
,
k0 Nc Wa + Wb + Wc
(5.26)
где k0– волновое число на центральной частоте. При этом число элек'
тродов в МПО должно быть
NC/ = NC
Wa + Wb + Wc
2 Wa Wb
,
(5.27)
113
pa
Канал А
Wa
Wc
Wb
Канал В
pb
Рис. 5.10. Асимметричный МПО для сжатия акустического пучка
где NC – число электродов, необходимое для полной перекачки энер'
гии.
Например, для МПО на подложке из ниобата лития YZ'среза при
отношении апертур полосок в каналах, равном 0,1, для полной пере'
дачи энергии из канала А в канал В требуется 190 электродов, а раз'
ница периодов должна составлять примерно 1%.
Устройство для сжатия акустического пучка на основе 3дБ!
МПО. Еще одна конструкция устройства на основе МПО с полной
передачей мощности, обеспечивающая сжатие акустического луча без
потерь мощности, приведена на рис. 5.11.
Ступенька на полосках между верхними и нижними каналами
первого МПО обеспечивает синфазность двух парциальных ПАВ в
нижнем канале и противофазность парциальных ПАВ в верхнем ка'
нале. В каждом канале одна из парциальных ПАВ проходит через
МПО с ослаблением в 3 дБ, а другая, также с ослаблением в 3дБ,
пав
пав
Рис. 5.11. Устройство для сжатия акустического пучка
на основе 3дБAМПО
114
ответвлена из соседнего канала МПО со сдвигом фазы на –90°. Кроме
того, ответвленные ПАВ за счет смещения полосок сдвинуты по фазе
на –90° в верхнем канале и +90° в нижнем канале. Таким образом,
общий фазовый сдвиг между парциальными ПАВ в верхнем канале
равен –180° и 0° в нижнем канале.
У второго МПО ступенька сделана в обратную сторону и распреде'
ление мощности ПАВ между каналами обратное – сигнал концент'
рируется в верхнем канале.
Недостаток МПО данной конструкции состоит в том, что он требу'
ет точного задания и реализации при изготовлении разницы между
периодами полосок в каналах. Еще один недостаток данной конст'
рукции – большие габариты, достоинство – небольшие потери.
115
Глава 6
УСТРОЙСТВА ФОРМИРОВАНИЯ И СЖАТИЯ
СЛОЖНЫХ СИГНАЛОВ НА ПАВ
Одной из основных характеристик радиосигналов с ограниченным
спектром является произведение ширины спектра сигнала ∆f на его
длительность T, называемое базой сигнала B = ∆fT. Сигналы, для
которых B>>1, называются сложными. Сложные сигналы широко
используются в радиолокации для увеличения дальности действия и
разрешения по дальности РЛС. Наибольшее распространение в ра'
диолокационных системах получили сложные сигналы с линейной
частотной модуляцией и фазокодоманипулированные сигналы. Су'
ществуют различные способы формирования сложных сигналов.
Формирование и сжатие ЛЧМ'сигнала на основе устройств на ПАВ
получило широкое распространение благодаря высокой точности ре'
ализуемых параметров сигналов с центральными частотами от 10
МГц до 1,5 ГГц. В настоящее время цифровые методы формирования
ЛЧМ'сигнала могут конкурировать с устройствами на ПАВ только
до частот ~300 МГц.
Для формирования и сжатия ЛЧМ'сигналов используются дис'
персионные акустоэлектронные линии задержки (ДАЛЗ), а для фор'
мирования и сжатия ФКМ'сигналов используются многоотводные
линии задержки (МЛЗ).
6.1. Основные соотношения и принцип работы устройств
формирования и сжатия ФКМAсигналов
Устройства формирования и сжатия (обработки) ФКМ'сигналов
находят применение в широкополосных системах связи, радиолока'
ции, в идентификационных кодирующих устройствах.
ФКМ'сигналы обладают рядом преимуществ.
В радиолокационной технике:
– увеличение дальности действия РЛС за счет увеличения отно'
шения сигнал / шум или увеличение разрешения по дальности при
одинаковой общей длине излучаемого импульса.
В широкополосных системах связи:
116
– секретность передачи информации, так как сигнал кодируется,
а распределение мощности в широкой полосе частот уменьшает воз'
можность его обнаружения;
– устойчивость к организованным помехам, так как корреляци'
онная обработка в приемнике уменьшает относительный уровень
организованной помехи;
– возможность одновременного доступа для нескольких абонен'
тов, поскольку одну и ту же полосу спектра могут иметь несколько
сигналов, если их коды не коррелированы.
Пусть задан радиосигнал в виде последовательности из N элемен'
тарных символов с частотой заполнения ω0, причем каждый длитель'
ностью τ0. Начальная фаза каждого элементарного символа может
меняться, и задана величиной θn.
Общее выражение для такого сигнала с дискретным кодировани'
ем имеет следующий вид:
N
ψ(t) = exp( jω0 t) ∑ pn cn ,
(6.1)
n =1
где pn – элементарный символ, т. е. импульс единичной высоты и
фиксированной длительности τ0, причем
⎧1, при (n − 1)τ0 ≤ t ≤ nτ0 ;
pn = ⎨
⎩0, при других t,
(6.2)
cn = exp( jθn ).
(6.3)
Для сигнала с двоичным кодом θn определяет содержание кода и
принимает значения 0 и 180°, поэтому множитель cn = exp( jθn ) = ±1,
т. е. является действительным коэффициентом, принимающим два
значения. По модулю этот коэффициент равен 1 и может быть пред'
ставлен в виде (+) или (–), или в виде пары 0 и 1, которая также
широко применяется при двоичной записи кодовых последователь'
ностей.
Следует отметить, что устройства на ПАВ позволяют реализовать
любые значения фазы сигнала θn и амплитуды pn, однако ниже рас'
смотрены только двухфазные коды, как представляющие наиболь'
ший интерес для практического использования.
Сумма в (6.1) отображает синусоиду длительностью T = Nτ0 , мо'
дулированную по фазе в зависимости от знака коэффициента cn. При
анализе двухфазных кодов сначала целесообразно рассматривать их
в виде огибающей без высокочастотного заполнения. В этом случае
импульсный отклик имеет вид
In (t) = pn cn .
(6.4)
117
На рис. 6.1 а и б показан двухфазный сигнал, состоящий из пяти
элементарных символов, и соответствующие ему структуры устройств
на ПАВ, на выходе которых он может быть получен.
Импульс возбуждения, подаваемый на вход преобразователя
ВШП'А, создает на выходе устройства синусоидальный сигнал, по'
добный показанному на рис. 6.1. Сигнал на выходе устройства фор'
мирования uвых ( τ) представляет собой свертку входного сигнала с
импульсным откликом формирователя:
uвых (τ) =
∞
∫ u(t)hф.с (τ − t)dt,
(6.5)
−∞
где u(t) – входной сигнал; hф.с(t) – импульсный отклик устройства
формирования ФКМ'сигнала.
Для того чтобы на выходе согласованного фильтра получить сиг'
нал в виде функции автокорреляции g(τ) вида
g (τ) =
∞
∫ uвых (t)uвых (t − τ)dt,
*
(6.6)
−∞
импульсная характеристика согласованного фильтра должна пред'
ставлять собой обращенный во времени входной сигнал (или выход'
ной сигнал устройства формирования ФКМ'сигнала):
hсф (t) ≈ uвых (−t)
1
1
1
0
а)
ВШП'А
(6.7)
1
б)
1
1
1
0
1
ВШП'B
ВШП'А
ВШП'B
Рис. 6.1. Два варианта устройства для формирования двухфазного
кодированного сигнала, состоящего из пяти элементарных символов:
а – формирование ФКМAсигнала с использованием широкополосного
входного и узкополосного выходного преобразователей; б – формироA
вание ФКМAсигнала с использованием узкополосного входного
и широкополосного выходного преобразователей
118
Устройство формирования
1 1 1 0 0 1 0
Устройство сжатия (согласованный фильтр)
Рис. 6.2. Устройства для формирования и сжатия ФКМAсигнала (полярA
ность подключения электродов кодирующего ВШП формирователя
ФКМAсигнала и согласованного фильтра противоположная)
Сжатый сигнал
Входной сигнал
1
1 1 1 0 1
2
Рис. 6.3. Принцип действия фильтра сжатия для последовательности
Баркера, состоящей из пяти элементарных символов: 1 – согласованA
ный фильтр ФКМAсигнала; 2 – сжатый сигнал
Для этого полярность электродов в согласованном фильтре долж'
на быть обратной полярности электродов в устройстве формирова'
ния ФКМ'сигнала (рис. 6.2).
При подаче кодовой последовательности, состоящей из пяти эле'
ментарных символов на вход согласованного фильтра, на его выходе
получим сжатый импульс с длительностью, равной длительности
одного элементарного символа (рис. 6.3).
6.2. Свойства кодов
Для формирования кодов с заданными свойствами используются
двухфазная, многофазная и амплитудная модуляция – как отдель'
но, так и в сочетаниях. Это двухфазные коды Голея, многофазные
коды Франка, Хуфмана и т.д. Чаще используются двухфазные коды.
119
При подаче на вход фильтра сигналов, отличающихся от согласо'
ванных, отклик фильтра целесообразно характеризовать временем
τ, измеряемым относительно точки пика корреляции, и сдвигом час'
тоты оригинала φ относительно импульсного отклика согласованно'
го фильтра. Если обозначить эту функцию как функцию отклика
χ(t, φ), то корреляционный отклик (рис. 6.5, б) можно рассматри'
вать как особый случай, когда φ = 0. В случае кодированных по фазе
сигналов время задержки τ может быть выражено через k целых ин'
тервалов τ0, причем максимуму корреляции соответствует k = 0.
Огибающую корреляционного отклика на двухфазный код, по'
данный на согласованный фильтр, можно получить, воспользовав'
шись алгоритмом Бернфельда, который предусматривает умноже'
ние набора значений cn на обратную последовательность c–n. В каче'
стве примера рассмотрим нахождение огибающей корреляционного
отклика на последовательность, состоящую из трех элементарных
символов.
Алгоритм Бернфельда
+ + –
– + +
______________
+ + –
+ + –
– – +
_______________
–1 0 3 0 –1
– функция отклика
Таким образом, для последовательности из трех элементарных
символов результирующая функция отклика имеет вид
χ(kτ0,0) = –1,0,3,0,–1
6.8)
при k от –2 до +2.
Последовательности Баркера. Последовательности Баркера об'
разуют класс двоичных кодов, функции корреляции которых имеют
боковые лепестки с максимальным значением, равным 1 (см. рис.
6.5, б). Иначе говоря:
k = 0,
⎧ N,
(6.9)
χ(kτ0 ,0) = ⎨
k
+
1,
0
,
≠
0,
⎩
где N — количество элементарных символов в коде.
В согласованном фильтре отношение сигнал / шум примерно рав'
но произведению времени задержки на ширину его полосы (N) или,
выраженное в децибелах, 10lоg10(N), дБ. Последовательности Бар'
кера относятся к группе сигналов, для которых отношение уровня
120
пика к уровню бокового лепестка также равно N (в децибелах
20log10(N), дБ). Истинные последовательности Баркера найдены
лишь для ограниченного числа элементов (до 13). Они приведены в
табл. 6.1.
Таблица 6.1
Число
элементов
Kод
Автокорреляция
2
++
+2+
2
+–
–2–
3
++–
–030–
4
++–+
+0+4+0+
4
+++–
–0+4+0–
5
+++–+
+0+050+0+
7
+++––+–
–0–0–070–0–0–
11
+++–––+––+–
– 0 – 0 – 0 – 0 – 0 11 0 – 0
–0–0–0–
13
+++++––++–+–+
+ 0 + 0 + 0 + 0 + 0 + 13 + 0 +
0+0+0+0+
Примечание. Уровень 1 обозначен «+», уровень –1 «–».
Более длинные последовательности могут быть получены из ко'
дов Баркера, если для представления одного бита в последовательно'
сти из N бит воспользоваться последовательностью из М элементар'
ных символов. Для этого последовательность из М элементарных
символов следует умножить на коэффициенты cn, соответствующие
последовательности из N бит. В результате отношение сигнал / шум
или коэффициент сжатия импульса определяется длительностью
новой последовательности NМ, а отношение уровня пика к уровню
бокового лепестка останется равным N.
Коды Баркера широко использовались в устройствах со сжатием
импульса на ранней стадии разработки этих устройств. Небольшая
длина кодов Баркера облегчает изготовление устройств, а равномер'
ность пиков боковых лепестков, чередующихся с нулями, облегчает
обнаружение искажений, связанных с эффектами второго порядка.
121
1
2
Рис. 6.4. Импульсный отклик на выходе формирователя ФКМAсигнала
(1), имеющий вид кода Баркера из 13 элементарных символов со
средней частотой 30 МГц (0,05 В/дел) (возбуждающий импульс (2)
имеет длительность 10 нс и амплитуду 60 В (10 В/дел)
На рис. 6.4 и рис. 6.5, соответственно, показаны импульсный и
корреляционный отклики устройства формирования кода Баркера
из 13 элементарных символов, выполненного на подложке из ниоба'
та лития УZ'среза. Импульсный отклик получен с использованием
входного сигнала, поступающего от генератора короткого импульса.
Для сравнения на рис. 6.5 а и б приведены экспериментальный и
теоретический корреляционные отклики. Основными параметрами
устройств формирования и сжатия ФКМ'сигналов являются коэф'
б)
а)
13
1
–1
–13
1 мкс/дел
Рис. 6.5. Корреляционный отклик согласованного фильтра со средней
частотой 29,34 МГц на код Баркера из 13 элементарных символов (по 6
периодов на символ): а — экспериментально полученный отклик и
входной сигнал (1мкс/дел); б — теоретический отклик
122
фициент сжатия импульса и минимальный уровень бокового лепест'
ка. Максимальное теоретическое значение коэффициента сжатия им'
пульса равно 13. Теоретический уровень боковых лепестков в сжа'
том сигнале составляет 22,3 дБ, а измеренный в эксперименте
(см. рис. 6.5) – 21 дБ. Как видно на осциллограмме рис. 6.5, форма
передних боковых лепестков хорошо соответствует теоретической, а
форма задних искажена. Эти искажения, как и различие в макси'
мальном относительном уровне боковых лепестков, обусловлены эф'
фектами второго порядка, которые можно частично устранить.
6.3. Устройства формирования и сжатия ЛЧМAсигналов
Сигналы с внутриимпульсной частотной модуляцией (ЧМ) исполь'
зуются в РЛС со сжатием импульсов как зондирующие сигналы. Ос'
нову устройств формирования и сжатия сложных сигналов в РЛС
составляют дисперсионные фильтры.
Дисперсионный фильтр представляет собой линейное устройство,
предназначенное для формирования частотно'модулированного им'
пульсного сигнала из входного радиоимпульсного сигнала. Диспер'
сионный фильтр выполняет функцию устройства задержки входного
радиосигнала, причем различные спектральные составляющие вход'
ного сигнала имеют различную задержку. Закон изменения задерж'
ки с частотой определяет вид частотной модуляции.
Подобные устройства используются в РЛС со сжатием импульса,
в состав которых входит передатчик, использующий дисперсионный
фильтр расширения и формирующий сигнал с внутриимпульсной ЧМ,
и приемник, снабженный согласованным фильтром или дисперсион'
ным фильтром сжатия. Дисперсионный фильтр сжатия во много раз
уменьшает длительность импульса на выходе приемника и увеличи'
вает отношение сигнал/шум, тем самым, увеличивая чувствитель'
ность приемника или дальность действия РЛС.
Принцип сжатия импульсов был предложен в 40'х годах XX века,
однако его практическое использование началось лишь после того,
как были разработаны практически реализуемые дисперсионные
фильтры. Среди таких дисперсионных фильтров оказались и фильт'
ры на ПАВ, появившиеся в конце 60'х годов. В настоящее время
метод сжатия импульсов широко используется в РЛС, при этом в
качестве дисперсионных фильтров, благодаря высокой точности их
характеристик, используются и фильтры на ПАВ. Наибольшее прак'
тическое применение получили ЧМ'сигналы с линейным изменени'
ем частоты во времени (ЛЧМ'сигналы).
123
Важными практическими применениями устройств обработки
ЛЧМ'сигналов помимо РЛС с сжатием импульса являются Фурье'
процессор и анализатор спектра. Принцип работы дисперсионных
фильтров, выполняющих преобразование Фурье – Фурье!процессо!
ров, основан на одном из свойств ЛЧМ'сигнала, состоящем в том, что
форма его огибающей при амплитудной модуляции близка к форме
модуля его спектра.
Анализатор спектра содержит дисперсионные фильтры расшире'
ния и сжатия, и измеряет модуль спектральной плотности входного
сигнала, обрабатывая информацию в реальном масштабе времени.
6.4. Принцип работы РЛС со сжатием импульса
В РЛС передатчик излучает короткий радиоимпульс, который от'
ражается от цели и поступает в приемник с задержкой, пропорцио'
нальной расстоянию до цели. Как и в любом приемнике, на входной
сигнал накладывается случайный шум, возникающий как в самом
приемнике, так и вне его. Способность приемника обнаружить сиг'
нал определяется отношением уровней мощностей сигнала и шума.
Для оптимизации характеристик системы линейный тракт прием'
ника, предшествующий детектору, должен быть спроектирован так,
чтобы обеспечивалось максимальное отношение сигнал/шум на вхо'
де детектора.
Структурная схема обычной РЛС изображена на рис. 6.6, а. Пере'
датчик генерирует радиоимпульс с постоянной несущей частотой и
прямоугольной огибающей. Параметры системы получаются близ'
кими к оптимальным, если полосовой фильтр в приемнике пропус'
кает большую часть спектральных составляющих излучаемого им'
пульса и отфильтровывает спектральные составляющие шума, рас'
положенные вне полосы пропускания.
Пусть требуется увеличить чувствительность РЛС за счет увели'
чения отношения сигнал/шум на входе детектора, что позволит об'
наруживать более удаленные или слабо отражающие цели. Можно
увеличить мощность передатчика, но это приведет к удорожанию
СВЧ'устройств и увеличению пиковой потребляемой мощности. С
другой стороны, можно увеличить длительность зондирующего им'
пульса. Однако большая длительность импульса ведет к ухудшению
разрешающей способности по дальности и, соответственно, к невоз'
можности различить две близко расположенные цели.
Метод сжатия импульсов позволяет увеличить отношение сигнал'
шум, не увеличивая пиковую мощность передатчика и не допуская
ухудшения разрешающей способности РЛС. Метод иллюстрируется
функциональной схемой на рис. 6.6, б. В отличие от традиционной
124
tи < 1 / ∆ f
а)
Генератор
радио'
импульсов
УМ
Антенна
Генератор
Амплитудный
детектор
Полосовой
фильтр
МШУ
Вычислитель
б)
t и < 1 /∆ f
Генератор
радио'
импульсов
T
Формирователь
ЛЧМ' сигнала
на ПАВ
УМ
Антенна
Опорный
генератор
50...1000 МГц
Квадратурный
фазовый
детектор
tсж 2 ∆ / f
Согласованный
фильтр
на ПАВ
Генератор
несущей
3...12 ГГц
МШУ
Вычислитель
Рис. 6.6 Функциональная схема РЛС: а – не использующая ЧМAсигнал;
б – со сжатием импульса
(УМ– усилитель мощности, МШУ – малошумящий усилитель)
125
системы (см. рис. 6.6, а) в системе со сжатием импульсов используют
длинный ЧМ'импульс. Спектр такого сигнала по'прежнему широ'
кий, несмотря на значительную длительность сигнала. В линейной
части приемника сигнал подвергается сжатию в согласованном филь'
тре, часто выполняемом в виде устройства на ПАВ.
Согласованным фильтром называют линейный фильтр, создан'
ный таким образом, чтобы при подаче на него суммы известного сиг'
нала и шума обеспечивалось максимальное отношение сигнал'шум
на выходе. Импульсная характеристика согласованного фильтра
представляет собой заданный входной сигнал, обращенный во вре'
мени.
Использование согласованного фильтра ЧМ'сигнала характери'
зуется двумя основными особенностями. Во'первых, длительность
выходного импульса определяется шириной спектра входного сиг'
нала, а не его длительностью, которую можно увеличивать, не ухуд'
шая разрешающей способности по дальности. Во'вторых, отноше'
ние сигнал/шум на выходе зависит от энергии входного импульса и
может быть увеличено путем увеличения длительности зондирую'
щего импульса без повышения уровня пиковой мощности.
Так как импульсы генерируются передатчиком периодически, уве'
личение длительности приводит к повышению средней мощности.
Как правило, это вполне приемлемо. Таким образом, сжатие импуль'
са позволяет повысить отношение сигнал/шум в приемнике без уве'
личения пиковой мощности и без ухудшения разрешающей способ'
ности РЛС.
В РЛС со сжатием импульса для получения приемлемых парамет'
ров сжатого сигнала, длительность передаваемого импульса должна
быть намного больше величины, обратной девиации частоты в спек'
тре ЧМ'сигнала (или полосы частот согласованного фильтра). Для
выполнения этого условия база сигнала, т. е. произведение длительно'
сти импульса на полосу пропускания Т∆f должно быть много больше 1.
Наиболее распространенной является внутриимпульсная ЧМ, при
которой частота линейно изменяется во времени (рис. 6.7, а). Сиг'
нал s(t) представляет собой сигнал от одиночной цели на входе при'
емника, отличающийся от излученного сигнала лишь задержкой во
времени и меньшей амплитудой. Так как фильтр в приемнике согла'
сован с излученным сигналом, его импульсная характеристика h(t)
представляет собой обращенный во времени сигнал с внутриимпуль'
сной ЧМ, в котором изменение частоты происходит в обратном на'
правлении.
Сигнал на выходе согласованного фильтра g(t), (рис. 6.7, б), име'
ет вид узкого пика, называемого корреляционным откликом, по кра'
126
а)
t – tH = T
tg K
fK– fH= ∆f
tK
t0
tH
tK– tH = T
fK– fH= ∆f
tg
tK
t0
tH
fH f0 fK f
fH f0 fK f
б)
s(t)
h(t)
g(t)
T
T
t сж
Рис. 6.7. Сжатие ЛЧМAсигнала
ям которого расположены боковые лепестки. Ширина корреляцион'
ного пика tсж ≈ 2 / ∆f, где ∆f – ширина спектра входного сигнала. В
общем случае ширина выходного пика намного меньше длительнос'
ти входного сигнала Т, поэтому согласованный фильтр иногда назы'
вают устройством сжатия импульсов.
Отношение длительностей входного и выходного сигналов в со'
гласованном фильтре называют коэффициентом сжатия, его значе'
ние приближенно равно произведению Т∆f.
На рис. 6.7 показан процесс сжатия импульса. Согласованный
фильтр, импульсная характеристика которого имеет частоту, убы'
вающую во времени, можно рассматривать как дисперсионную ли'
нию задержки (ДЛЗ). Групповое время запаздывания сигнала в со'
гласованном фильтре уменьшается с ростом частоты, в то время как
во входном сигнале высокочастотные составляющие локализованы
в конце импульса. Поэтому спектральные составляющие входного
сигнала задерживаются таким образом, что все они появляются на
выходе одновременно, обусловливая наличие узкого корреляцион'
ного пика большой амплитуды.
Если имеются две малоразмерных цели, то на вход приемника по'
ступают два одинаковых сигнала, задержанные на время, пропорци'
ональное расстоянию до целей. Поскольку согласованный фильтр
линеен, выходной сигнал будет представлять собой сумму выходных
сигналов, обусловленных каждой из целей в отдельности. Это спра'
ведливо даже в том случае, когда оба импульса перекрываются во
времени; два раздельных выходных корреляционных пика отчетли'
во различимы, если разница времени задержки превышает длитель'
ность пика 1 / ∆f. Таким образом, разрешающая способность по
127
дальности определяется величиной 1 / ∆f, существенно отличающей'
ся от длительности Т входного сигнала.
В обычных РЛС без сжатия импульса, работающих с прямоуголь'
ными импульсами, разрешающая способность зависит от длитель'
ности радиоимпульса, которая, в свою очередь, обратно пропорцио'
нальна ширине спектра. Поэтому в обоих случаях она пропорцио'
нальна 1 / ∆f.
Выигрыш от сжатия импульса можно характеризовать количе'
ственно с помощью отношения сигнал/шум на выходе согласован'
ного фильтра. Отношение мощности сигнала к мощности шума на вы'
ходе
Q = 2ЕS / Nш,
(6.10)
где ЕS – энергия сигнала, а Nш – спектральная плотность мощности
шума на входе фильтра. Огибающая радиолокационного сигнала
имеет прямоугольную форму, поэтому энергия излученного импуль'
са ЕS = РSТ, где РS — средняя мощность в излучаемом импульсе. Тог'
да отношение сигнал/шум на выходе согласованного фильтра
Q0 = 2 РS T / Nш.
(6.11)
Соотношение (6.11) справедливо для любых сигналов с прямоу'
гольной огибающей, прошедших через согласованный фильтр.
Сравним отношения сигнал / шум на выходе РЛС со сжатием сиг'
нала и обычной РЛС, полагая, что в обеих системах используются
согласованные фильтры. При длительностях импульса T в РЛС со
сжатием импульса и T0 в обыкновенной РЛС величины Q на выходах
относятся как T / T0 при условии, что РS и Nш в обоих случаях оди'
наковы. Если при этом разрешающая способность по дальности обе'
их РЛС одинакова, то полоса пропускания ∆f в системе со сжатием
импульсов должна быть примерно равна 1 / T0, откуда
QЛЧМ / Q0 ≈ T∆f.
(6.12)
В устройствах на ПАВ обычно T∆f ~ 50...1000. Tаким образом,
принцип сжатия импульса обеспечивает отношения сигнал/шум, ко'
торые соответствуют повышению пиковой мощности РЛС в 50...1000
раз.
Tребования к сложным сигналам. Помимо сигналов с внутриим'
пульсной ЧМ'модуляцией, существует ряд других сложных сигна'
лов, пригодных для использования в РЛС со сжатием импульса. К
ним предъявляются следующие основные требования:
– форма огибающей импульса должна быть прямоугольной, так
как в этом случае реальные передатчики имеют наибольший КПД;
– произведение T∆f должно быть большим, чтобы улучшение от'
ношения сигнал/шум было большим;
128
– сигнал должен быть таким, чтобы на выходе согласованного
фильтра возникал короткий импульс с небольшими боковыми лепе'
стками. Эти лепестки обусловливают ложные сигналы, из'за кото'
рых невозможно обнаружить небольшие объекты рядом с крупным
объектом, например, перископ подводной лодки рядом со стороже'
вым кораблем.
Наиболее распространенными типами сигналов, удовлетворяю'
щих перечисленным выше требованиям, являются сигналы с внут'
риимпульсной ЧМ и фазокодоманипулированные. Последние часто
применяют в системах связи. В радиолокационных системах пред'
почтение отдают сигналам с внутриимпульсной ЧМ, для которых
существует ряд эффективных способов минимизации уровня боко'
вых лепестков.
Помимо этого сигналы с внутриимпульсной ЧМ, как правило,
менее чувствительны к доплеровским сдвигам частоты. Эти сдвиги,
вызванные передвижением цели относительно РЛС, играют суще'
ственную роль при слежении за быстро движущимися целями.
Методы формирования сигналов с внутриимпульсной ЧМ
В настоящее время существует ряд методов формирования сигна'
лов с внутриимпульсной ЧМ в передатчике РЛС.
Метод активного формирования основан на использовании ак'
тивных цепей. В простейшем из них применяется генератор, управ'
ляемый пилообразным напряжением. Этот прямой метод не позво'
ляет реализовать низкий уровень искажений сигнала, так как часто'
та должна меняться быстро. Обычно для компенсации искажений
сигнала автогенератора приходится вводить предыскажения в при'
ложенное управляющее напряжение.
Цифровые методы обработки сигналов отличаются универсаль'
ностью, т. е. простотой изменения параметров сигнала простым пе'
репрограммированием. По сравнению с техникой ПАВ применение
цифровых методов ограничено более низкими частотами, а устрой'
ства в целом получаются более громоздкими и потребляют больше
мощности. Тем не менее новейшие достижения в области технологии
интегральных микросхем, увеличение быстродействия и повышение
степени интеграции делают цифровые методы все более и более при'
влекательными. В настоящее время им отдается предпочтение при
обработке сигналов на частотах до 200 МГц.
Метод пассивного формирования основан на использовании филь'
тра, импульсная характеристика которого имеет вид требуемого вы'
ходного сигнала, а сам фильтр называется фильтром расширения.
129
Мгновенная частота импульсной характеристики такого фильтра
изменяется в направлении, противоположном направлению измене'
ния частоты в согласованном фильтре. Этот метод привлекателен тем,
что позволяет очень точно воспроизвести заданную форму сигнала.
Более того, он позволяет снизить влияние некоторых видов погреш'
ностей. Основным недостатком метода пассивного формирования яв'
ляется значительное уменьшение уровня мощности сигнала при боль'
ших значениях T∆f. По этой причине отношение сигнал/шум в сфор'
мированном сигнале может стать неудовлетворительным.
6.5. Конструкции дисперсионных фильтров на ПАВ
В конце 60'х годов впервые появились встречно'штыревые преоб'
разователи на ПАВ и непосредственно вслед за этим были разработа'
ны устройства формирования и сжатия с отражательными структу'
рами на канавках (дисперсионные фильтры на ПАВ), позволяющие
обрабатывать сигналы с очень большим значением T∆f, достигаю'
щим нескольких тысяч.
Имеется две основные разновидности дисперсионных фильтров на
ПАВ:
– устройства с встречно'штыревыми преобразователями, электроды
которых расположены с плавно изменяющейся периодичностью;
– устройства на отражательных структурах, использующие в ка'
честве отражателей канавки или полоски с плавно изменяющейся
периодичностью.
Кроме того, заданный характер дисперсии в дисперсионном филь'
тре можно получить, применяя дисперсионные виды акустических
волн. Например, в слоистом полупространстве дисперсионными яв'
ляются как рэлеевские волны, так и волны Лява. Дисперсионные
волны могут распространяться в плоскопараллельной пластине. Ус'
тройства формирования и сжатия сигналов, в которых распростра'
няются дисперсионные волны, имеют вид тонких металлических лент
с преобразователями объемных волн на концах и называются лен'
точными линиями задержки.
Известны также дисперсионные фильтры, использующие бездис'
персионные объемные волны, длина пути распространения в устрой'
стве у которых зависит от частоты.
6.6. Характеристики ЧМAсигналов
Такие важнейшие показатели РЛС, как разрешающая способность
по дальности, отношение сигнал/шум и уровень боковых лепестков,
зависят от выбора параметров ЧМ'сигналов и от точности их реали'
зации в микроэлектронных устройствах.
130
При проектировании дисперсионных фильтров на ПАВ принято
вначале синтезировать устройство, формирующее сигнал с внутри'
импульсной ЧМ. Сигнал v(t) на выходе устройства формирования ЧМ'
сигнала можно представить в виде
v(t) = aE (t)cos[ϕE (t)],
(6.13)
где ϕE(t) – полная фаза, представляющая собой нелинейную функ'
цию времени, aE(t) – огибающая сигнала, которая принимает нуле'
вое значение вне интервала времени длительностью T, где T – дли'
тельность ЧМ'сигнала. Функция ϕ(t) должна быть монотонной.
Определим мгновенную частоту в ЧМ сигнале Ω(t) как производ'
ную от ϕ(t):
∂ϕ(t)
(6.14)
.
∂t
Введем также функцию µ(t), представляющую скорость измене!
ния мгновенной частоты:
Ω E (t) =
µ(t) =
1 ∂Ω(t) 1 ∂2ϕ(t)
=
.
2π ∂t
2π ∂t2
(6.15)
Будем рассматривать сигналы, мгновенная частота которых пред'
ставляет собой монотонную функцию, возрастающую или убываю'
щую во времени. Если µ(t) > 0, то мгновенная частота сигнала увели'
чивается, а если µ(t) < 0, то частота уменьшается.
В случае ЛЧМ'сигнала µ(t) – постоянная величина, которая опре'
деляет наклон дисперсионной характеристики устройства (см. рис.
6.7), причем
∆f
(6.16)
= const(t).
T
Как следует из (6.15) в случае ЛЧМ'сигнала Ω(t) – линейная, а
ϕ(t) – квадратичная функция времени.
Если v(t) в выражении (6.13) представляет собой сигнал, излуча'
емый РЛС, то импульсная характеристика согласованного фильтра
должна иметь вид h(t) = v(–t) с точностью до некоторой задержки во
времени и произвольного множителя. Поскольку фаза сигнала v(t)
изменяется по квадратичному закону, то фаза h(t) должна зависеть
от времени как –ϕ(–t). Тогда импульсная характеристика согласо'
ванного фильтра должна иметь вид
(6.17)
h(t) = ac (−t)cos[ϕc − ϕ(−t)],
µ=
где ϕc – постоянный фазовый сдвиг, наличие которого непринципи'
ально.
131
6.7. Основные характеристики ЛЧМAсигнала
Идеальный ЛЧМ'сигнал описывается общим выражением:
s(t) = aE (t)cos[ϕE (t)].
(6.18)
Поскольку мгновенная частота в ЛЧМ'сигнале изменяется во вре'
мени линейно (рис. 6.8):
Ω(t − t0 ) = ω0 + 2πµ(t − t0 ),
(6.19)
причем параметр µ = ∆f / T = const(t). Тогда, интегрируя (6.19) соглас'
но определению мгновенной частоты (6.14), получим, что фаза ϕE(t)
является квадратичной функцией времени:
(6.20)
ϕE (t − t0 ) = ω0 (t − t0 ) + πµ(t − t0 )2 + ϕE0 ,
где ϕE0 – постоянная величина.
Огибающая ЛЧМ'сигнала, при условии t0 = 0 (см. рис. 6.8), опи'
сывается выражением
⎪⎧ 1, при t − t0 ≤ T /2;
aE (t − t0 ) = ⎨
⎪⎩0, при t − t0 > T /2.
(6.21)
T = tK–tH – длительность ЛЧМ'сигнала.
Время задержки различных спектральных составляющих
в идеализированном ЛЧМ'сигнале изменяется линейно с частотой
(см. рис. 6.8):
1
tg (f − f0 ) = tH + (f − f0 ).
µ
Время задержки tg(ω) согласно определению:
(6.22)
∂ϕ(ω)
(6.23)
.
∂ω
Тогда, подставляя (6.22) в (6.23) и интегрируя обе части уравне'
ния, для частотной зависимости фазы в ЛЧМ'сигнале получим
tg (ω) = −
π
(6.24)
ϕ(f − f0 ) = 2πT (f − f0 ) + (f − f0 )2 + ϕE .
µ
Число периодов в ЛЧМ'сигнале равно Tf0 и не зависит от парамет'
ра µ.
Реальные зависимости времени задержки от частоты tg(ω) и мгно'
венной частоты от времени Ω(t) имеют пульсации. Причем пульса'
ции присутствуют как на амплитудном спектре сигнала, так и на
зависимостях фазы сигнала от частоты.
Спектр ЛЧМ'сигнала с прямоугольной огибающей описывается
комплексными интегралами Френеля. На рис. 6.9 изображены спек'
132
а)
б)
tg
tg
tK
tK
tо
tо
tн
tH
fн
fо
fK
f
fн
fо
fK f
Рис. 6.8. Идеализированные зависимости времени задержки от частоты
различных спектральных составляющих: а – в ЛЧМAсигнале; б –
входного сигнала, при прохождении им согласованного фильтра
T∆f = 40
A,
отн. ед
∆, градус
∆f
10
∆f
0
–10
f0
f0
T∆f = 100
A,
отн. ед
∆f
∆, градус
10
∆f
0
–10
f0
f0
Рис. 6.9. Спектр ЛЧМAсигнала с прямоугольной огибающей для двух
значений базы сигнала (фазовые характеристики построены в виде
отклонений от заданного квадратичного закона)
133
тры ЛЧМ'сигналов с прямоугольной огибающей для двух значений
произведения T∆f, рассчитанные с помощью преобразования Фурье.
Фазовые характеристики построены в виде отклонений от заданного
квадратичного закона.
Пульсации амплитуды и фазы спектра в полосе частот ∆f, обычно
называемые пульсациями Френеля, уменьшаются по мере увеличе'
ния произведения T∆f. Но даже при больших значениях T∆f>>1000
они имеют место. Эти пульсации обусловлены резким нарастанием
амплитуды сигнала в начале импульса и резким спадом его в конце
импульса. Для уменьшения пульсаций Френеля используют ЛЧМ'
импульсы увеличенной длины (с «хвостами» в начале и конце им'
пульса), при этом пропорционально увеличивается девиации часто'
ты в сигнале. Такой ЛЧМ'импульс имеет плавное нарастание ампли'
туды в начале импульса и плавный ее спад в конце импульса, при
этом центральная часть импульса имеет постоянную амплитуду, а ее
длительность и девиация частоты в ней соответствуют исходному
импульсу. Длина «хвостов» определяется желаемой неравномернос'
тью амплитуды и фазы спектра сигнала.
6.8. Сжатие ЛЧМAсигнала
Пусть ЛЧМ'сигнал с прямоугольной огибающей поступает на вход
согласованного фильтра (рис. 6.10, а). Если, как это определено
(6.17), импульсная характеристика согласованного фильтра (СФ)
соответствует входному сигналу, обращенному во времени, то
h(t) = ac0 (t)cos[ϕc (t)],
(6.25)
где
ϕc (t) = −ϕE (−t) = ω0 (t − t0 ) − πµ(t − t0 )2 + ϕc0 ,
(6.26)
причем ac0(t) = aE(t). Положим t0 = 0, тогда сигнал на выходе согла'
сованного фильтра g(t) приближенно
g (t) =
∞
∫ s(τ)h(t − τ)dτ ≈ 0,5T cos(ω0t)sin c(π∆ft),
(6.27)
−∞
где sinc(π∆ft) = sin(π∆ft) / (π∆ft)
Таким образом, при подаче ЛЧМ'сигнала с прямоугольной огиба'
ющей на вход согласованного с ним фильтра огибающая выходного
сигнала имеет вид sin(π∆ft) / (π∆ft). Уровень ближайших боковых
лепестков этого сигнала на 13 дБ ниже уровня главного максимума
(см. рис. 6.10, а), что неприемлемо для большинства практических
задач радиолокации, где обычно требуется подавлять боковые лепе'
стки не менее чем на 26 дБ.
134
а)
б)
s(t)
h(t)
T
T
s(t)
ha (t)
–13дБ
g(t) ~ sinc(x)
t 0сж
–30..–35дБ ga(t) ~ Ft{W(f)}
a
t сж
Рис. 6.10. Сжатие ЛЧМAсигнала: a– без амплитудного взвешивания; б–
с амплитудным взвешиванием (длительность ЛЧМAсигнала T и длиA
тельность сжатого сигнала tсж показаны условно. В реальных устройA
а
0
ствах T/tсж>>1 и tсж
)
≈ 2tсж
Длительность сжатого сигнала на выходе согласованного фильт'
ра по первым нулевым значениям вблизи максимального значения
равна tсж ≈ 2 / ∆f.
Для уменьшения уровня боковых лепестков в сжатом сигнале ис'
пользуется согласованный фильтр с амплитудным взвешиванием.
При этом импульсная характеристика СФ ha(t) имеет колоколобраз'
ный вид (рис. 6.10, б). Строго говоря, такой фильтр уже не является
согласованным. Весовая обработка в согласованном фильтре позво'
ляет уменьшить уровень боковых лепестков в сжатом сигнале до зна'
чений –30...–40 дБ ниже уровня основного пика. Этот уровень уже
определяется выбранной весовой функцией, точностью реализации
характеристик устройств и базой обрабатываемого сигнала. Вместе с
тем использование амплитудного взвешивания ухудшает отношение
сигнал/шум примерно на 1–2 дБ, так как фильтр уже не является
согласованным по отношению к входному сигналу.
Использование амплитудного взвешивания в согласованном филь'
тре помимо снижения уровня боковых лепестков и некоторого рас'
согласования, т. е. ухудшения отношения сигнал/шум, приводит к
расширению главного лепестка, которое можно скомпенсировать за
счет увеличения полосы ∆f.
Другая возможность уменьшить уровень боковых лепестков, свя'
зана с применением нелинейной ЧМ, при которой изменение частоты
в ЧМ'сигнале представляет собой некоторую нелинейную функцию
135
времени. Это позволяет уменьшить уровень боковых лепестков без
ухудшения отношения сигнал'шум. Однако параметры сжатого сиг'
нала с нелинейной ЧМ более чувствительны к доплеровским сдвигам
спектра отраженного ЧМ'сигнала, и поэтому сигналы с нелинейной
ЧМ не всегда пригодны для использования.
Пусть сигнал s(t), поступающий на вход фильтра с импульсной
характеристикой ha(t), обусловливает сигнал на выходе ga(t). Вход'
ной сигнал представляет собой ЛЧМ'импульс с прямоугольной оги'
бающей
(6.28)
s(t) = aE (t)cos[ω0t + πµt2 + ϕE ].
Импульсная характеристика согласованного фильтра для этого
сигнала должна иметь вид s(–t), однако для фильтра с амплитудным
взвешиванием огибающая ha(t) будет близка к некоторой огибаю'
щей ac(t) (рис. 6.10, б), т. е.
ha (t) = aс (t)cos[ω0t − πµt2 − ϕс ].
(6.29)
Пусть преобразование Фурье от функций s(t) и ha(t) есть S1 (ω) и
1 (ω) соответственно. Согласно методу стационарной фазы ампли'
H
a
туда и фаза спектра ЛЧМ'сигнала приближенно равны:
(6.30)
A (ω) ≈ 0,5a(TS )/ µ , ϕ(ω) ≈ ϕ(TS ) − ωTS + sign(µ)π /4,
где TS(ω) – «точка стационарной фазы», или момент времени, кото'
рый является решением уравнения ∂ϕ(t)/ ∂t = ω; a(TS) – значение оги'
бающей ЛЧМ'сигнала в момент времениTS.
Тогда огибающая спектра входного ЛЧМ'сигнала S1 (ω) близка к
огибающей самого сигнала, т. е. к прямоугольной форме. Кроме того,
1 (ω) ~ a [T (ω)], т. е. форма коэффициента передачи согла'
модуль H
a
с S
сованного фильтра (в частотной области) повторяет форму его им'
пульсной характеристики (во временной области). Другими слова'
ми, для ЛЧМ'сигнала, весовая функция ac(t) во временной области
пропорциональна весовой функции ac(ω) в частотной области с точ'
ностью до изменения масштаба.
1 (ω) :
Спектр выходного сигнала G (1ω) равен свертке S1 (ω) и H
a
∞
1
G1 (ω) =
∫ S1 (ω') H1 a (ω − ω')dω'.
2π −∞
(6.31)
1 (ω)
Тогда, подставляя в (6.31) приближенные значения S1 (ω) и H
a
согласно методу стационарной фазы, получим, что огибающая спек'
тра сигнала на выходе согласованного фильтра G1 (ω) близка к огиба'
ющей преобразования Фурье от импульсной характеристики согла'
сованного фильтра:
136
G1 (ω) ~ Ft{ac (t)}, при f − f0 ≤ ∆f /2.
(6.32)
Этот результат удобно выразить с помощью действительной весо'
вой функции W(ω), такой, что W (ω − ω0 ) ~ Ft{ac (t)}, симметричной
относительно центральной частоты и равной нулю, если f − f0 > ∆f /2.
Тогда
G1 (ω) ~ W (ω − ω0 ).
(6.33)
−1
Если функция W (t) Ft{W (ω)} = представляет собой обратное
преобразование Фурье от W(ω), то выходной сигнал ga(t) можно най'
ти с помощью теоремы о сдвиге:
(6.34)
ga (t) ~ W (t)cos(ω0 t).
Следовательно, огибающая выходного сигнала пропорциональна
функции W (t) .
6.9. Типы весовых функций
Для синтеза импульсной характеристики согласованного фильт'
ра, которая обеспечивала бы низкий уровень боковых лепестков в
сжатом сигнале на выходе устройства, необходимо подобрать весо'
вую функцию в частотной области W(ω), равную нулю для
f − f0 > ∆f /2, обратное преобразование Фурье от которой W(t) имеет
низкий уровень боковых лепестков во временной области. Подобная
задача имеет место при выборе весовых функций для полосовых филь'
тров, где необходимо подобрать весовую функцию во временной об'
ласти, которая обеспечивала бы низкий уровень боковых лепест'
ков в частотной области.
Весовая функция согласованного фильтра ЛЧМ!сигнала – функ'
ция, которая определяет форму импульсной характеристики согла'
сованного фильтра (или его АЧХ) и предназначена для уменьшения
уровня боковых лепестков в сжатом ЛЧМ'сигнале на выходе согла'
сованного фильтра.
Весовая функция полосового фильтра – функция, которая опре'
деляет огибающую импульсной характеристики полосового фильт'
ра и предназначена для уменьшения уровня боковых лепестков на
амплитудно'частотной характеристике фильтра.
Весовые функции, пригодные для полосовых фильтров, можно
применять для синтеза дисперсионных фильтров, поменяв местами
частоту и время.
Весовые функции, используемые в практике синтеза дисперсион'
ных фильтров, были получены при решении подобных, с математи'
ческой точки зрения, задач в антенной технике, где требуется, чтобы
137
боковые лепестки диаграммы направленности в полярных коорди'
натах были хорошо подавлены.
Оптимальными свойствами с точки зрения максимального подав'
ления боковых лепестков при минимальном расширении сжатого
сигнала обладает функция Дольфа – Чебышева. Однако эта функция
практически не реализуема, так как имеет особенности на краях.
Различную степень приближения к функции Дольфа – Чебышева в
зависимости от числа членов разложения дают функции Тейлора.
Весовая функция Тейлора, позволяющая задавать уровень боковых
лепестков, имеет следующий вид:
n'−1
⎧
⎪1 + 2 ∑ Fm cos[2πm(f − f0 )/ ∆f ], при f − f0 ) ≤ ∆f /2, (6.35)
WT (ω) = ⎨
m =1
⎪
0, при f − f0 > ∆f /2,
⎩
причем
⎧
⎫
⎪
⎪
m +1
⎪ 0,5(−1)
⎪
Fm = ⎨ n'−1
⎬
2
2 ⎪
⎪
(1 − m / p )
⎪∏
⎪
⎩ p =1
⎭
2
n'−1 ⎧
m2
⎪
⎪⎫
−
1
⎨
∏ ⎪ σ2 [α2 + (k − 0,5)2 ] ⎬⎪,
k =1 ⎩
⎭
(6.36)
где σ = n'/ ⎡α2 + (n'− 0,5)2 ⎤ – параметр, определяющий расширение
⎣
⎦
сжатого импульса относительно идеального взвешивания по функ'
ции Дольфа – Чебышева; параметр α – определяет уровень боковых
лепестков в сжатом импульсе; n – число членов разложения, опреде'
ляющее точность аппроксимации функции Дольфа – Чебышева, при'
чем штрих у параметра n означает, что из произведения необходимо
исключить члены с m = p.
Некоторые из семейства функций Тейлора, обеспечивающие раз'
личный уровень боковых лепестков в сжатом сигнале, приведены на
рис. 6.11.
Максимальный боковой лепесток функции WT(ω) непосредствен'
но примыкает к главному лепестку. Соответствующим выбором па'
раметров функции Тейлора – n и α можно подобрать требуемую фун'
кцию аподизации.
При выбранной величине α по мере увеличения n ширина сжатого
сигнала уменьшается, приближаясь к значению, даваемому функ'
цией Дольфа – Чебышева, определяющей минимально возможную
ширину при заданном уровне боковых лепестков.
138
W (f), дБ
T
–5
α=34дБ; n=5
–10
–15
α = 43,5дБ; n = 20
–20
α = 43,5дБ; n = 6
–25
–30
α = 50 дБ; n =10
f0– ∆f/2
f0
Частота
f0+∆f/2
Рис. 6.11. Весовые функции Тейлора, обеспечивающие различный
уровень боковых лепестков в сжатом сигнале
Используемое на практике значение n ограничено. Во'первых,
сложностью практической реализации весовой функции с большим
n. И, во'вторых, соображениями необходимой достаточности, по'
скольку параметры сжатого сигнала ограничены несовершенством
характеристик устройства (отличием их от идеальных). Типичным
является значение n = 6 для уровня боковых лепестков a в пределах
30…40 дБ, или n = 10 для α, равного ~ 50 дБ.
Хотя известно достаточно много весовых функций, чаще всего
используют весовые функции Хэмминга или Тейлора. Функция Хэм'
минга WX(ω) определяется следующим выражением:
2
⎪⎧0,08 + 0,92cos [2π(f − f0 )/ ∆f ], при f − f0 ≤ ∆f /2; (6.37)
WX (ω) = ⎨
0, при f − f0 > ∆f /2.
⎪⎩
Функция Хемминга WX(ω) практически совпадает с функцией Тей'
лора WT(ω) при n = 5 и α = 43 дБ, т. е. можно рассматривать функцию
Хемминга как частный случай функции Тейлора.
Огибающая выходного сигнала, пропорциональная W (t) , имеет
ряд боковых лепестков, уровень максимального из которых зависит
от выбранной функции взвешивания и для функции Тейлора с α = 43,5
дБ и n = 6 примерно на 43,5 дБ ниже максимума главного лепестка
(рис. 6.12). Длительность сжатого сигнала по уровню 6 дБ для взве'
шенного фильтра примерно в два раза превышает tсж для фильтра без
взвешивания (см. рис. 6.12, кривые 1 и 2) при одинаковой полосе
пропускания ∆f. Таким образом, подавление боковых лепестков дос'
139
t сж
W(t–t 0), дБ
1
–6 дБ
2
–10
–20
–30
–40
–50
–60
–4
–2
2
0
(t–t0)·∆f, отн. ед.
4
Рис. 6.12. Огибающие сжатого сигнала на выходе согласованного
фильтра относительно t = t – t0: 1 – в случае отсутствия весовой обраA
ботки в СФ; 2 – в случае использования в СФ весовой функции Тейлора
с α=43,5 дБ с n=6 (длительность сжатого сигнала на уровне 0,5 для
∆f и
весовой обработки с α =43,5 дБ при n=6 и n=20 составляет tсж=1,80/∆
∆ f соответственно)
1,78/∆
tсж ∆f, отн. ед
Aр ,дБ
n=10
1,5
n=8
n=8
1,4
n=6
2,0
1,8
n=6
1,6
1,3
n=4
1,4
1,2
1,2
1,1
1,0
1,0
+
10
15 20 25 30
35
40
45
50
α, дБ
Рис. 6.13. Нормированная длительность сжатого ЛЧМAсигнала tсж и
потери на рассогласование AP на выходе согласованного фильтра,
взвешенного в соответствии с функцией Тейлора с различными значеA
ниями параметров α и n (там же приведены соответствующие значения
для функции Хэмминга (пунктир). Крестик соответствует случаю
отсутствия весовой обработки)
140
тигается за счет некоторого ухудшения разрешающей способности
РЛС.
На рис. 6.13 показана зависимость длительности сжатого сигна'
ла на выходе СФ от относительного уровня боковых лепестков. Дли'
тельность сжатого сигнала измерена на уровне –6 дБ и нормирована
на ∆f. Можно отметить, что чем ниже уровень боковых лепестков,
тем больше длительность сжатого сигнала. Крестиком отмечено зна'
чение tсж для фильтра без взвешивания, т. е. с прямоугольной огиба'
ющей импульсной характеристики СФ.
На рис. 6.13 приводится также график потерь на рассогласова!
ние для СФ с различными значениями параметров весовой функции
Тейлора. Потери на рассогласование определяют уменьшение отно'
шения сигнал/шум на выходе СФ из'за того, что фильтр не является
согласованным для входного сигнала. На этом же рисунке приведе'
ны потери рассогласования и ширина главного лепестка для фильт'
ра с весовой функцией Хэмминга.
6.10. Проектирование дисперсионных фильтров на ВШП
Одним из устройств, на основе которых возможно создание дис'
персионных фильтров для формирования и сжатия ЧМ'сигналов яв'
ляются дисперсионные линии задержки на ПАВ. Существует целый
ряд конструктивных исполнений ДЛЗ. Рассмотрим два из них, кото'
рые являются основой для всех прочих.
Первая из рассматриваемых здесь конструкций включает два пре'
образователя, один из которых дисперсионного типа, а другой – ши'
рокополосный малоэлектродный преобразователь с постоянным пе'
риодом следования электродов (рис. 6.14). Частотно'модулирован'
ВШП '1
pN
ВШП '2
Wn
Вход
y
p
p
1
z
n
tn
Выход
zn – z1
Рис. 6.14. Конструкция простейшего дисперсионного фильтра на ПАВ
(pn=zn+1–zn – полупериод электродов ВШП)
141
ный сигнал формирует преобразователь ВШП'1 при подаче на него
короткого радиоимпульса (или видеоимпульса), а назначение второ'
го преобразователя (ВШП'2) – преобразовать акустическую волну в
электромагнитную с минимальными искажениями формы огибаю'
щей сформированного импульса. Отметим, что огибающая спектра
возбуждающего импульса должна иметь минимальную неравномер'
ность в полосе рабочих частот ДЛЗ, например 1 дБ. Второй тип кон'
струкции ДЛЗ, основу которого составляют отражательные струк'
туры дисперсионного типа, будет рассмотрен в следующем разделе.
Пусть требуется сформировать ЛЧМ'сигнал длительностью T и
девиацией частоты в спектре ∆f. Из условия расположения центров
электродов в максимумах и минимумах высокочастотного заполне'
ния ЛЧМ'сигнала можно получить выражение для z'координат цен'
тров электродов в виде
zn = A1 1 + A2 (n − 1) − 1,
где n = 1,..., N; A1 = − A0 VПАВ f1 / µ;
A2 = − A0µ / f12 ;
(6.38)
f1 = f0 + A0 ∆f /2;
A0 = sign(µ); µ = ∆f /T.
Общее число электродов в преобразователе N = 2f0T. Для ДЛЗ,
предназначенной для дисперсионного фильтра расширения'форми'
рования ЛЧМ'сигнала A0 = 1, а для согласованного фильтра или дис'
персионного фильтра сжатия A0 = 1. При A0 = 1 соотношение (6.38)
дает линейное увеличение периода следования электродов в ВШП'1,
а при A0 = –1 – линейное уменьшение периода. Следует отметить, что
при формировании ЛЧМ'сигнала используется как A0 = 1, так и
A0 = –1, но предпочтение обычно отдается A0 = 1. В любом случае в
согласованном фильтре значение A0 должно иметь знак, противопо'
ложный значению A0 в фильтре расширения.
Максимальная апертура электродов преобразователя обычно вы'
бирается минимально возможной при допустимых потерях, обуслов'
ленных дифракционными эффектами. Она обычно составляет ~
40…100 λ0, где λ0 – длина волны на центральной частоте.
Для расчета коэффициента передачи дисперсионных фильтров
пригодны соотношения (3.11), (3.12), (3.14), (3.17), (3.19). Вос'
пользуемся ими.
Проводимость преобразователей определим из соотношений
(3.11), (3.17). Соотношение (3.11) имеет вид
G А (ω) ≈
142
4 2
2
κЭМ ωCВШП N2 JK (ω) ,
π
причем емкость ВШП определяется по соотношению (3.15):
N
CВШП = 0,5 ∑ Wn C2n .
n =1
Для модели однородного распределения поверхностного тока с
учетом изменяющейся апертуры электродов вдоль ВШП для JK(k)
можно получить
N
Wn In
exp( j κzn )sin c [ κpn /4],
n =1 W0 I0
JK ( κ ) = ∑
(6.39)
где In – ток в n'м электроде; zn – координата центра n'го электрода,
W0 – максимальная апертура электродов в ВШП.
Зная входную проводимость преобразователя, достаточно просто
рассчитать потери на преобразование ВШП (или модуль коэффици'
ента передачи), используя полученное ранее соотношение (3.19):
⎡ 2Y G (ω) ⎤
Г A
⎥ , дБ,
AВШП (ω) = 10log10 ⎢
⎢ Yвх (ω) + YГ 2 ⎥
⎣
⎦
где Yвх (ω) ≈ G A (ω) + jωCВШП .
Модуль коэффициента передачи устройства в целом находится по
соотношениям (3.21) – (3.23), а фазочастотную характеристику уст'
ройства можно рассчитать по соотношению
ϕ( κ) = arctg
Im{JK ( κ)}
Re {JK ( κ)}
+ arctg
Im{Yвх ( κ)}
Re{Yвх ( κ)}
.
(6.40)
Как видно из соотношения (3.14), активная часть входной прово'
димости ВШП увеличивается с частотой. Кроме того, реактивная
часть входной проводимости также увеличивается с частотой. По'
этому, для того чтобы получить плоскую вершину потерь на преобра'
зование ВШП в полосе рабочих частот, апертура электродов ВШП
Wn должна меняется от электрода к электроду (см. рис. 6.14) соглас'
но приближенному соотношению
Wf (zn ) ≈ W (ω0 )
f0
2
2
YГ2 + ω2n CВШП
/ YГ2 + ω20 CВШП
,
fn
(6.41)
где fn = VПАВ /2 pn .
Уточнить вид зависимости Wf(zn) необходимо расчетным путем,
поскольку (6.41) является приближенным выражением.
143
В случае проектирования согласованного фильтра, после того как
получена плоская вершина модуля коэффициента передачи ДЛЗ,
в закон изменения апертуры электродов ВШП'1 необходимо ввести
функцию аподизации, например Хемминга (3.30):
⎡ zn − zN /2 ⎤ ⎪⎫
⎪⎧
WX (zn ) = W0 ⎨0,08 + 0,92cos2 ⎢ π
⎥ ⎬.
⎪⎩
⎣ zN − z1 ⎦ ⎪⎭
Результирующая функция аподизации электродов в ВШП согла'
сованного фильтра
WСФ (zn ) = W0 Wf (zn )WX (zn ).
(6.42)
Проектирование топологии ВШП'2 сводится к выбору числа элек'
тродов в нем таким образом, чтобы потери на преобразование в поло'
се рабочих частот имели заданную неравномерность, например 1дБ.
За исходное значение можно принять N ≈ f0 /(2∆f ) , а затем, умень'
шая его, расчетным путем уточнить.
Важным параметром при проектировании ДЛЗ на ПАВ является
толщина электродов ВШП hM. Она выбирается исходя из того, что'
бы обеспечить низкий уровень отражений ПАВ от электродов, при
приемлемом уровне сопротивления потерь электродов 2hM / pmin<
<0,01, где pmin – минимальный полупериод ВШП.
Следует отметить также, что присутствие электродов на поверх'
ности звукопровода изменяет скорость ПАВ. Это изменение необхо'
димо учитывать при вычислении положения электродов согласно
(6.38). Причем, поскольку величина изменения скорости ПАВ при
2hM / pmin<0,01 примерно пропорциональна отношению hM / pmin, то
поправки, вводимые в (6.38) зависят от pn. Введение поправок в (6.38)
особенно важно в широкополосных ДЛЗ с относительной полосой
рабочих частот более 10%. Пренебрежение поправками в широкопо'
лосных ДЛЗ приводит к сильному искажению дисперсионной харак'
теристики, т. е. зависимости времени задержки от частоты, и, как
результат, искажению сжатого сигнала на выходе СФ.
6.11. Проектирование дисперсионных фильтров
на отражательных структурах
Для формирования и сжатия ЛЧМ'сигналов помимо устройств на
основе ВШП дисперсионного типа широко используются также уст'
ройства на отражательных структурах. Их преимущества по сравне'
нию с устройствами на ВШП состоят в следующем. Во'первых, уст'
ройства с ОС позволяют формировать и сжимать сигналы со значи'
144
тельно большей базой (до 16000). Во'вторых, точность характерис'
тик устройств на основе ОС выше, чем устройств на основе ВШП,
соответственно параметры формируемых и сжимаемых ДЛЗ сигна'
лов на основе ОС лучше.
Пусть требуется сформировать ЛЧМ'сигнал длительностью T и
девиацией частоты в спектре ∆f. Для формирования и сжатия будем
использовать конструкцию ДЛЗ с отражательными структурами
(рис. 6.15). Такая конструкция ДЛЗ была предложена Вильямсоном
и Смитом в 1972 году. Она включает два широкополосных преобра'
зователя, служащие для возбуждения и приема ПАВ, и отражатель'
ные структуры, формирующие ЛЧМ'сигнал. При подаче короткого
радио' или видеоимпульса на один из преобразователей ВШП'1 или
ВШП'2 (конструкция симметрична) он преобразуется в волновой
пакет смещений частиц (акустический волновой пакет), распростра'
няющийся в виде ПАВ внутри звукопровода. Причем внутри звуко'
провода различные спектральные составляющие волнового пакета
распространяются по различным траекториям. Каждая спектраль'
ная составляющая волнового пакета испытывает преимущественное
отражение в той части ОС, где ее частота близка к частоте синхрониз'
ма отражателей, определяемой как fk = 0,5Vz /(zk+1 − zk ). Так, напри'
мер, для случая, изображенного на рис. 6.15, спектральные состав'
ляющие с низкими частотами fн испытывают преимущественное от'
ражение в начале ОС, а с высокими fв – в конце ОС (см. рис. 6.15).
Благодаря выбранному закону изменения периода ОС задержка раз'
личных спектральных составляющих волнового пакета меняется
линейно с частотой.
ВШП'1
y
ОС
f
f
н
в
Wm
W0
ВШП'2
z1
zn zm
zN
z
Рис. 6.15. Конструкция дисперсионного фильтра на ПАВ
с использованием отражательных структур и A0=1
145
Таким образом, важнейшим этапом проектирования ДЛЗ на ПАВ
является правильное задание координат отражателей ОС. Из усло'
вия расположения центров отражателей в максимумах и минимумах
высокочастотного заполнения ЛЧМ'сигнала можно получить выра'
жение для z'координат центров отражателей в виде
(6.43)
zn = B1 ⎡1 − 1 − B2 (n − 1) ⎤ ,
⎣
⎦
где n = 1,…,NОС; B1 = − A0 VПАВ f1 / µ; B2 = −2 A0 µ / f12 ; f1 = f0 + A0 ∆f /2;
A0 = sign(µ); µ = 2∆f /T.
Общее число электродов в преобразователе NOС = f0T /2. Для ДЛЗ,
предназначенной для дисперсионного фильтра расширения'форми'
рования ЛЧМ'сигнала A0 = 1, а для согласованного фильтра или дис'
персионного фильтра сжатия A0 = –1. Координаты по оси y для всех
элементов ОС неизменны, и для верхней ОС yn = y1, а для нижней ОС
ym = y2.
Коэффициент передачи ДЛЗ представим в виде произведения трех
сомножителей:
(6.44)
K1 (ω) = K1 (ω) K1 (ω) K1 (ω),
1
2
OC
где K1 1 (ω), K1 2 (ω) – коэффициенты преобразования (или потери на
преобразование) ВШП'1 и ВШП'2 соответственно; K1 OC (ω) – коэф'
фициент передачи отражающей структуры. Расчет потерь на преоб'
разование K1 1 (ω) и K1 2 (ω) включает расчет активных GA1(ω) и GA2(ω),
а также реактивных Im{Yвх,1 (ω)} ≈ ωC1 и Im{Yвх,2 (ω)} ≈ ωC2 составля'
ющих проводимостей входного и выходного преобразователей по соот'
ношениям (3.14),(3.15). Тогда из условий согласования входного и
выходного ВШП коэффициенты преобразования на входе и выходе ДЛЗ:
K1 1 (ω) =
K1 2 (ω) =
2Yг G A1 (ω)
[Yг + G A1 (ω)]2 + (ωC1 )2
2Yн G A 2 (ω)
[Yн + G A 2 (ω)]2 + (ωC2 )2
,
(6.45)
,
(6.46)
где Yг, Yн – проводимость генератора и нагрузки соответственно.
Расчет K1 OC (ω) на основе модели суммирования парциальных от'
раженных волн приводит к выражению вида
N
K1 OC (ω) = ∑
N
∑ γnmρnρm ξn ξm exp[− jβ(zn + zm + ∆yVy / Vz )],
(6.47)
n =1 m =1
где γnm – коэффициент перекрытия m'го и n'го отражателей соответ'
ственно в направлении z (рис. 6.16); ρn, ρm – коэффициенты отражения
146
y
W
y=y
n
n
1
∆y
y=y
m
W
2
m
γ nm
zm
z1
zn
zN
z
Рис. 6.16. К определению параметров расчета ОС
от n'го и m'го отражателей; ξm и ξn – коэффициенты прохождения ОС до
m'го и n'го отражателей; zn, zm – координаты центра n'го и m'го отра'
жателей; β = κ–jα(ω), κ = ω / Vz, Vy, Vz – скорости ПАВ в направлении y
и z соответственно; α(ω) – потери в материале; ∆y = y1–y2.
При прохождении ПАВ через каждый отражатель ОС имеет место
процесс отражения и рассеяния. С учетом частичного отражения ПАВ
и преобразования части энергии ПАВ в объемные волны коэффици'
енты прохождения ПАВ до n'го и m'го отражателей:
m
ξm (ω) = ∏ [1 − ζ k (ω)] 1 − ρ2k (ω).
(6.48)
k=1
Для отражательной структуры в виде канавок величина ςk (ω) ,
определяющая долю мощности, преобразованную в объемные волны
на k'й канавке:
ςk (ω) = 1 − exp[1 − ηk (ω)(hk / λ)2 ],
(6.49)
где ηk(ω) – коэффициент, определяющий долю мощности, преобразо'
ванной на k'й канавке в объемные волны, его зависимость от относи'
тельной частоты для ниобата лития YZ'среза приведена на рис. 6.17;
hk – глубина k'й канавки; λ – длина волны ПАВ на частоте f.
Коэффициент отражения при падении ПАВ на отражательный
элемент в виде канавки под углом, близким к 45°, приведенный к
центру канавки:
ρn ( κ) = j2C
hn
sin( κan /2),
λ
(6.50)
147
η
отн. ед
16,0
12,0
8,0
4,0
0,0
1,0
2,0
3,0
4,0
f / fn
Рис. 6.17. Частотная зависимость коэффициента преобразования ПАВ
в объемные акустические волны на канавках ОС; fn = Vz /(zn +1 − zn )
где κ – волновое число ПАВ; an – ширина n'й канавки в направлении
оси z. В случае hn / λ < 0,01 для ниобата лития YZ'среза коэффици'
ент C ≈ 0,51, а для кварца ST'среза С ≈ 0,6.
Фазочастотную характеристику ДЛЗ можно определить как сум'
му фазочастотных характеристик отражающей структуры и ВШП:
ϕ(ω) = arctg[ Im{ KОС(ω)} / Re{ KОС(ω)}] + ϕ0(ω),
(6.51)
где ϕ0(ω) – фазочастотная характеристика ВШП. Расчет ФЧХ'уст'
ройства по соотношению (6.51) необходим для контроля дисперси'
онной характеристики ДЛЗ.
После выбора координат центров электродов ВШП и ОС в процес'
се анализа частотных характеристик ДЛЗ по соотношениям (6.44)–
(6.50) следует определить требуемое линейное изменение апертуры
отражателей Wf(zn) (или глубины канавок hK) вдоль ОС. Ищется та'
кое линейное изменение Wf(zn) вдоль ОС, при котором в полосе рабо'
чих частот имеет место минимальная неравномерность модуля коэф'
фициента передачи K(ω).
Далее, если проектируется согласованный фильтр, то в закон из'
менения апертуры ОС необходимо ввести весовую функцию. Если
используется симметричная конструкция ДЛЗ, что предпочтитель'
но, то функция аподизации вводится как в верхнюю, так и в нижнюю
части ОС, симметрично относительно оси структуры (рис. 6.18). При
этом закон изменения апертуры отражателей WСФ(zn) можно опреде'
лить по соотношению
WСФ (zn ) = W0 ⋅ Wf (zn )
148
Wa (zn )
⎡π
π zn − zNOC /2 ⎤
sin ⎢ − ε
⎥
2 zNOC − z1 ⎦⎥
⎣⎢ 2
.
(6.52)
где Wa(zn) – выбранная функция взвешивания Тейлора или Хеммин'
га; ε = 0,5…1 – коэффициент, подбираемый расчетным образом до
получения требуемой формы модуля коэффициента передачи.
Общий вид конструкции согласованного фильтра на основе ДЛЗ с
отражательными структурами показан на рис. 6.18.
y
y =y
n
Wn
1
y =y
Wm
m 2
W
0
z
zn zm
Рис. 6.18. Конструкция дисперсионного фильтра на ПАВ с весовой
обработкой для сжатия ЛЧМAсигнала (A0=–1)
Таблица 6.2
ДЛЗ
на ВШП
№1
ДЛЗ
с ОС №2
ДЛЗ
с ОС №3
Центральная частота, МГц
1400
400
700
Девиация частоты в спектре
формируемого ЛЧМ'сигнала, МГц
1100
180
200
Длительность дисперсионной задержки
в ДЛЗ, мкс
0.44
90
4
База формируемого сигнала
484
16200
800
Уровень боковых лепестков в сжатом
сигнале на выходе ДЛЗ, дБ
26
33
30
Длительность сжатого сигнала на
уровне –6 дБ, нс
3,5
12
10
Наименование параметра
149
Примеры практической реализации дисперсионных фильтров на
основе дисперсионных линий задержки на ПАВ приведены в табл. 6.2.
Каждый комплект включает ДЛЗ для формирования ЛЧМ'сигнала и
ДЛЗ для сжатия ЛЧМ' сигнала.
150
Глава 7
УСТРОЙСТВА КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ
СИГНАЛОВ НА ПАВ
7.1. Нелинейные взаимодействия в упругой среде
При рассмотрении линейных устройств на ПАВ предполагалось,
что сигнал проходит через устройство с ослаблением, но без искаже'
ний. Искажения сигнала, в частности, могут быть обусловлены не'
линейными свойствами среды.
Природа нелинейных взаимодействий различна и может быть свя'
1
1
зана с зависимостью тензоров упругих c (uвх ), пьезо' e (uвх ) или диэ'
1
лектрических ε(uвх ) постоянных от амплитуды входного сигнала в
пьезоэлектрике uвх. Однако при небольших амплитудах акустичес'
ких волн нелинейными свойствами среды можно пренебречь. Вместе
с тем при уровнях мощности ПАВ в кристалле ~10дБм плотности
энергии, локализованной в тонком приповерхностном слое, доста'
точно для проявления различных нелинейных взаимодействий меж'
ду ПАВ и средой, в которой происходит распространение волны.
Свойства параметрического взаимодействия ПАВ в среде, облада'
ющей нелинейными свойствами, позволяют создать ряд устройств
для обработки сигналов: корреляторы, управляемые линии задерж'
ки, инверторы сигнала и преобразователи частоты.
Основной операцией, производимой коррелятором, является вы'
числение свертки двух сигналов
T
∫
g (t) = lim s1 (τ)s2 (t − τ)dτ,
T →∞
(7.1)
0
где s1(t), s2(t) – сигналы, поступающие на вход устройства; T – время
их взаимодействия. Из (7.1) следует, что для вычисления корреля'
ционной функции с использованием ПАВ необходимо выполнить
операции умножения и интегрирования акустических сигналов. Для
перемножения сигналов могут быть использованы как механизм
внутренней нелинейности, возникающей при распространении акус'
151
тических волн большой амплитуды в пьезоэлектрическом кристал'
ле, так и внешние нелинейные элементы, например обычные полу'
проводниковые диоды.
7.2. Коррелятор с внутренней нелинейностью
Свертка при встречном распространении ПАВ. Рассмотрим не'
линейное взаимодействие при встречном распространении двух ПАВ
в устройстве, изображенном на рис.7.1, а. Данное устройство при
рассмотрении только линейных процессов, представляет собой ли'
нию задержки. Однако учет нелинейных взаимодействий обнаружи'
вает у него свойства конвольвера. Рассмотрим его подробнее.
Будем считать, что входные сигналы s1(t) и s2(t) представляют
собой гармонические колебания с частотами ω1 и ω2 и поступают на
входы 1 и 2 соответственно. Конвольвер работает при слабой нели'
нейности и относительно низких уровнях мощности, когда нелиней'
ные искажения входных сигналов несущественны. В этом случае вход'
ные сигналы можно задать выражениями
u1 (t, z) = A1 cos(ω1t − k1z);
u2 (t,z) = A2 cos(ω2t + k2z),
(7.2)
где A1, A2 – постоянные коэффициенты; k1 = ω1 / V , k2 = ω2 / V – вол'
новые числа; V – скорость волны.
Эффект акустической нелинейности в конвольвере при взаимодей'
ствии двух волн, приводит к возникновению гармоник основной час'
а)
б)
s 3(t)
2
s1(t)
s3 (t)
3
s2(t)
W
3
s2(t)
s1 (t)
L
1
2p
Рис. 7.1. Конвольверы наПАВ: а – вырожденный; б – невырожденный
(1 – параметрический электрод; 2 – заземленный электрод;
3 – подложка)
152
тоты; в частности, образуются волны, пропорциональные квадра'
там амплитуд входных сигналов u12 (t, z) и u22 (t, z) и сигнал, пропорци'
ональный произведению амплитуд сигналов.
Для изучаемых в настоящей главе устройств в первую очередь пред'
ставляет интерес составляющая, связанная с произведением ампли'
туд входных сигналов:
s3 (t, z) ~ u1 (t, z)u2 (t, z) =
= 0,5 A1 A2 ⎡⎣ cos{(ω1 + ω2 )t + (k2 − k1)z} + cos{(ω1 − ω2 )t − (k1 + k2 )z}⎤⎦ . (7.3)
При не очень высоких уровнях мощности составляющие выход'
ного сигнала, пропорциональные произведению амплитуд входных
сигналов в степени более высоких порядков, можно считать пренеб'
режимо малыми.
Металлические электроды конвольвера соответствующей конфи'
гурации позволяют селективно считывать электрическое поле, соот'
ветствующее каждому из этих слагаемых. В конвольвере, изображен'
ном на рис.7.1, а, используется однородный металлический элект'
род, называемый параметрическим электродом, который действует
совместно с заземленной пластиной.
Вырожденный конвольвер с внутренней нелинейностью. Конст'
рукция вырожденного конвольвера с акустической нелинейностью
на встречных ПАВ приведена на рис.7.1, а. Сплошной параметри'
ческий электрод избирательно считывает составляющую электричес'
кого поля, которая не зависит от продольной координаты z. Если
частоты ω1 и ω2 входных сигналов равны: ω1 = ω2 = ω, то для состав'
ляющей с суммарной частотой ω = ω1+ω2 в выражении (7.3) разница
k2–k1 = 0, и для этой составляющей отсутствует зависимость от z.
Выходное напряжение в этом случае пропорциональ'
но 0,5 A1 A2 cos(2ωt).
Устройство, в котором амплитуда выходного сигнала пропорцио'
нальна произведению амплитуд входных сигналов, называют били!
нейным.
Если значения ω1 и ω2 не равны, то в (7.3) отсутствуют слагаемые,
не зависящие от координаты z, и пространственно независимые поля
обусловливаются лишь квадратичными составляющими u12 (t, z)
и u22 (t, z). Однако частоты этих членов равны нулю и они подавляют'
ся в конвольвере, поскольку постоянный ток через параметрический
электрод не проходит.
153
Если два сигнала s1(t − z / V ) и s2 (t + z / V ) распространяются в не'
линейной среде навстречу друг другу со скоростью V, то выходной
сигнал суммарной частоты можно записать в виде
L /2
g (t) =
∫
s1 (t − z / V )s2 (t + z / V )dz,
(7.4)
− L /2
где L – длина параметрического (интегрирующего) электрода; z = 0
соответствует центру электрода. Подставляя в (7.4) τ = t–z / V, по'
лучим
T /2
g (t) =
∫
s1(τ)s2 (2t − τ)dτ,
(7.5)
−T /2
где T = L / V — время интегрирования.
Выражение (7.5) представляет собой свертку сигналов s1(t) и s2(t).
Коэффициент 2 перед t изменяет временной масштаб выходного сиг'
нала, что обусловлено встречным распространением ПАВ.
Если сигнал s2(t) является инвертированным во времени сигна!
лом s1(t), т. е. если s1(t) = s2(–t), то в результате их нелинейного
взаимодействия выходной сигнал конвольвера на частоте 2ω пред!
ставляет собой корреляционную функцию сигналов s1(t) и s2(t) с
временем интегрирования T = L / V.
Выражение (7.5) определяет свертку функций s1(t) и s2(t) с точно'
стью до коэффициента 2, который указывает на сжатие во времени.
Если не учитывать этого сжатия, то выходной сигнал конвольвера
формально будет совпадать с выходным сигналом линейного фильт'
ра, несмотря на то, что работа последнего основана на нелинейном
эффекте. Выходной сигнал линейного фильтра представляет собой
свертку входного сигнала с импульсной характеристикой. В конволь'
вере роль импульсной характеристики выполняет один из входных
сигналов, называемый опорным.
На практике конвольвер используют главным образом в качестве
согласованного фильтра. Эффект сжатия сигнала во времени, наблю'
даемый в конвольвере, физически объясняется тем, что здесь относи'
тельная скорость распространения двух волн равна 2V, а не V, как в
линейном устройстве на ПАВ. По этой же причине в случае гармони'
ческих входных колебаний частота выходного сигнала в два раза
превышает частоту сигнала на входе.
Невырожденный конвольвер с внутренней нелинейностью. Если
частоты непрерывных входных сигналов различны, то простран'
ственный период составляющей с суммарной частотой, описываемой
154
выражением (7.3), составляет 2π /(k2 − k1). Эту составляющую мож'
но избирательно считать параметрическим электродом, внеся такую
пространственную периодичность в структуру электрода. Как пока'
зано на рис.7.1, б периодическая структура может иметь вид решет'
ки электродов подобной ВШП с шагом 2p, причем для считывания
составляющей выходного сигнала с частотой ω1+ω2, пространствен'
ный полупериод преобразователя p должен определяеться выраже'
нием ω1 − ω2 = 2πV /(2 p). Такое устройство называют невырожденным
конвольвером.
Параметрический преобразователь фактически аналогичен ВШП
с нерасщепленными электродами, который рассчитан для централь'
ной частоты ω1–ω2.
При падении ПАВ на решетку электродов имеет место интенсив'
ное преобразование ПАВ в объемные волны. Причем максимально
эффективное преобразование происходит, когда частота ПАВ состав'
ляет более 1,3 частоты синхронизма решетки. Это явление ухудшает
характеристики невырожденных конвольверов, и поэтому они име'
ют ограниченное практическое использование.
Управляемая линия задержки. Устройство, приведенное на
рис.7.1, а может выполнять функцию управляемой линии задерж'
ки. Если в (7.5) сигнал s1(t) имеет вид δ'функции, т. е. s1(τ) = δ(τ − t1 ), то
T /2
g (t,t1) =
∫
δ(τ − t1 )s2 (2t − τ)dτ = s2 (2t − t1).
(7.6)
−T /2
Изменяя момент времени t1 – момент подачи коротких радиоим'
пульсов на вход 1, можно регулировать время задержки сигнала s2(t)
на выходе устройства.
Основным недостатком всех устройств, основанных на использо'
вании внутренней нелинейности, является низкий коэффициент пре'
образования. Величина вносимых потерь в этих устройствах состав'
ляет 60–90 дБ.
Свертка сигналов с произвольными направлениями распростра!
нения. При нелинейном взаимодействии должны выполняться усло'
вия фазового и частотного согласования:
k3 = k1 + k2; ω3 = ω1 + ω2,
(7.7)
где k = ω / V волновое число.
Согласно (7.7) возможны две схемы построения коррелятора: на
встречных волнах и на однонаправленных волнах.
Векторная диаграмма, отражающая связь величин κ и ω для пер'
вой из вышеупомянутых схем, приведена на рис. 7.2, а. При равных
155
б) ω
а)
2ω 0
S (ω – ω1 , 0)
3
2
ω2
S ( ω2, k 1)
ω1
S1 ( ω1, k1 )
2
S3 (2ω 0,0)
ω0
S (ω ,–k )
0
2
0
–k0
S1 (ω 0, k0 )
0
k0
k
0
k1
k
Рис. 7.2. Условия фазового согласования для встречного (а) и однонапA
равленного (б) распространения волн
скоростях распространения V и частотах ω1 = ω2 = ω0 в нелинейной
среде возможно возникновение колебания с частотой 2ω0 и с волно'
вым числом κ3 = 0.
Если две волны распространяются в одном направлении, то из век'
торной диаграммы на рис. 7.2, б видно, что скорости волн должны
отличаться, т. е. необходимо использовать два различных типа аку'
стических волн. Это ограничивает возможности практического ис'
пользования коррелятора с однонаправленными волнами, а при ис'
пользовании волн только одного типа, например ПАВ, такая схема
коррелятора вообще нереализуема.
7.3. Рабочие характеристики коррелятора
Простейшим конвольвером на ПАВ является вырожденный кон'
вольвер, изображенный на рис.7.1, а. Нелинейной средой распрост'
ранения обычно является ниобат лития.
Эффективность вырожденных акустических устройств. Рабо'
та акустического конвольвера основана на нелинейном взаимодей'
ствии распространяющихся ПАВ, в результате которой на выходе
устройства создается напряжение, пропорциональное пространствен'
ному интегралу от произведения входных сигналов. Оценка эффек'
тивности взаимодействия гармонических входных сигналов с одина'
ковой частотой ω, характеризуемая выходным напряжением холос'
того хода на частоте 2ω и может быть представлена в виде
Ueff = (M / W ) P1P2 ,
(7.8)
где W – ширина параметрического электрода. Мощности P1 и P2 по'
верхностных волн считаются малыми (типичное значение уровня
мощности входного сигнала +25 дБм), а ширина параметрического
156
электрода W предполагается равной апертурам преобразователей.
Константа связи М зависит только от свойств материала и ориента'
ции подложки.
Коэффициент М учитывает различные упругие, пьезо' и диэлект'
рические модули и является коэффициентом качества нелинейного
взаимодействия для данного материала.
В соотношении (7.8) условия распространения ПАВ считаются
идеальными, т. е. дифракция, дисперсия и затухание волн не учиты'
ваются. Заметим, что выходное напряжение не зависит от частоты
входного сигнала и от длины параметрического электрода.
Постоянная М сложным образом связана с линейными, нелиней'
ными и объемными константами материала. Однако на практике
многие константы, необходимые для таких расчетов, неизвестны или
точность их определения недостаточно высока. Поэтому значение М
необходимо определять экспериментально, измеряя выходные напря'
жения конкретных устройств.
Для ниобата лития Y,Z'среза значение М = 1,2•10–4 В•м / Вт.
Обычно для изготовления устройств выбирают именно этот матери'
ал, поскольку, обладая сильной нелинейностью, он имеет неболь'
шое дифракционное расширение пучка.
В табл. 7.1 приведены параметры различных материалов, а также
пьезоэлектрических и пьезополупроводниковых устройств с внутрен'
ней нелинейностью, выполненных на данном материале.
Коэффициент билинейности. Величиной, определяющей эффек'
тивность устройства, на практике служит коэффициент билинейно'
сти С, связывающий мощности сигналов, подводимых ко входам ус'
тройства, с мощностью выходного сигнала.
Пусть P1 и P2 – мощности сигналов, поступающих от генераторов
гармонических колебаний, подключенных к входам, и P0 – выход'
ная мощность, развиваемая в нагрузке. Отметим, что при расчете
этих мощностей следует учитывать наличие соответствующих согла'
сующих цепей, с помощью которых на практике обеспечивают мак'
симальную эффективность конвольвера. Мощность P0 пропорцио'
нальна произведению P1P2, что дает возможность ввести коэффици'
ент билинейности:
(7.9)
C = 10lg[P0 /( P1 ⋅ P2 )], дБм,
где мощности сигналов в кристалле P1, P2, P0 измеряются в милли'
ваттах. Этой формулой можно пользоваться применительно к любо'
му билинейному устройству, включая некоторые описываемые далее
типы конвольверов без акустической нелинейности.
157
Таблица 7.1
Длина
Частота, Потери,
взаимодейст'
МГц
дБ
вия, мм
Срез
Тип
нелиней'
ности
М.104,
В·м/Вт
YZ
У
1,21
35
60
8
[001]
[110]
У
1,02
16,4
60
20
YZ
У
0,03
1350
70
20
Окись
цинка
Основная
У
0,246
30
60
30
Сульфид
кадмия
Основная
Э'Ф
0,5
51
50
12
Материал
Ниобат
лития
Германат
висмута
Пьезокварц
(объемная)
Примечание: У – упругая нелинейность; Э'Ф – электрон'фононная нели'
нейность.
В общем случае коэффициент С зависит от частоты ω входных сиг'
налов. При соответствующем согласовании в вырожденном акусти'
ческом конвольвере (см. рис.7.1, а) на центральной частоте входного
сигнала 100 МГц обычно получают С = – 85 дБм.
7.4. Волноводный конвольвер
Для обычного конвольвера на ниобате лития, работающего на
центральной частоте 100 МГц с шириной пучка 1,25 мм, C ≈ –85 дБм,
при P1 = 20 дБм (т. е. 0,1 Вт и определяется пробоем преобразователей).
Максимальный уровень выходного сигнала (–85+20+20) дБм = –45 дБм.
Типичный уровень шума для полосы рабочих частот 30 МГц на входе
устройства и 60 МГц на выходе устройства равен приблизительно –
95 дБм (уровень шума приемника на несколько децибел выше kBT∆f,
где kB – постоянная Больцмана; Т — комнатная температура и ∆f –
полоса рабочих частот). Тогда максимальный динамический диапа'
зон (отношение максимально допустимого входного сигнала к мини'
мально обнаружимому) составляет 50 дБ. Такой динамический диа'
пазон ограничивает область использования подобных устройств.
Эффективность работы простейшего акустического конвольвера
невелика. Как можно заключить из (7.8), существует два пути реше'
ния данной проблемы. Один заключается в использовании очень уз'
158
кого акустического пучка в акустическом волноводе при сохранении
мощностей сигналов в кристалле, а другой – в существенном увели'
чении константы M, используя внешние нелинейные элементы, на'
пример полупроводниковые диоды. Путь, связанный с использова'
нием внешней нелинейности, будет рассмотрен в следующем подраз'
деле. Ниже рассмотрим способ, связанный с увеличением амплитуды
акустических волн в кристалле.
Пусть входные преобразователи конвольвера идеально согласо'
ваны, а уровни мощности входных сигналов находятся в допусти'
мых пределах. Тогда, как следует из (7.8), единственным способом
повышения выходного напряжения является уменьшение ширины
параметрического электрода (при сохранении мощности входных сиг'
налов в кристалле). Оказалось, что ширину параметрического элек'
трода можно уменьшить до нескольких длин волн. При этом, благо'
даря разности скоростей на свободной и металлизированной поверх'
ностях кристалла, параметрический электрод начинает вести себя
как волноводная направляющая система.
Для эффективного использования волновода требуется обеспечить
возбуждение ПАВ в виде узкого пучка. Применение малоапертурных
преобразователей нецелесообразно вследствие их высоких входных
сопротивлений, затрудняющих согласование с подводящим трактом.
Хорошим решением проблемы является использование преобразо'
вателя с оптимальной апертурой с последующим сжатием акустичес'
кого луча с помощью МПО примерно в 10 раз.
Одна из возможных конструкций волноводного конвольвера изоб'
ражена на рис. 7.3. Для формирования акустического волновода на
пьезоэлектрическую подложку наносится тонкая металлическая по'
лоска шириной от 50 до 100 мкм (две'три длины волны). Более ши'
рокий ВШП (шириной около 1 мм) используется совместно с МПО
MП O
P2,f
P1,f
L
W
LiNb03
P3,2f
Рис. 7.3. Конструкция волноводного конвольвера
159
для уменьшения ширины пучка до 100 мкм. Широкий входной пу'
чок необходим, для того чтобы импедансы входных преобразовате'
лей были согласованы с источником сигнала и чтобы при заданной
входной мощности напряжение на электродах было недостаточно
высоким для межэлектродного пробоя. Акустическая волна, прохо'
дящая под полоской, имеет несколько меньшую скорость, чем волна
вне металлической полоски. Поэтому акустический пучок будет ис'
пытывать полное отражение на краях металлической полоски. Сред'
няя металлическая полоска служит выходным электродом, а две со'
седние полоски – заземленными электродами.
Таким образом можно увеличить эффективность приблизительно
на 20 дБ, при этом величина коэффициента билинейности C ≈ – 65 дБ
(обычное значение –85дБм), и динамический диапазон 70 дБ.
Такие конвольверы применяются в настоящее время в радиолока'
ционных системах военного назначения и системах широкополос'
ной связи.
7.5. Корреляторы с внешней нелинейностью
Другим способом повышения эффективности конвольвера явля'
ется использование внешней нелинейности. Схема коррелятора с
внешними диодами приведена на рис. 7.4. В этом случае устройство
на ПАВ представляет собой двухканальную многоотводную линию
задержки (МЛЗ), причем два канала акустически независимы и мо'
гут располагаться на разных кристаллах.
1
2
m
k1
S (t, f )
1
1
k2
S2 (t, f2 )
S 3 (2t, f3 )
f=f–f
3
2
1
Рис. 7.4. Схема коррелятора с внешними нелинейными элементами
160
Для перемножения сигналов отводы первой и второй многоотвод'
ной линии задержки соединяются с входом полупроводникового ди'
ода, выполняющего функцию смесителя, а усреднение сигналов про'
изводится путем простого суммирования сигналов с выходов полу'
проводниковых диодов.
Фильтрация нежелательных комбинационных частот осуществ'
ляется в выходном фильтре, настроенном на разностную частоту
f3 = f2–f1.
Следует отметить, что внешние диоды могут быть конструктивно
выполнены как в виде отдельных элементов, так и в интегральном
исполнении – в виде диодной матрицы на единой кремниевой пласти'
не.
В экспериментальных устройствах удалось реализовать до 150
отводов (ВШП) с задержкой между отводами 30 нс, что позволяет
выполнять обработку сигналов с шириной спектра до 15 МГц. В уст'
ройствах данного типа достигнут коэффициент билинейности около
–30 дБм и динамический диапазон 80 дБ.
Полупроводниковые конвольверы можно использовать для запо'
минания акустических сигналов и многократного считывания (кор'
реляционной обработки) записанной копии. Для запоминания ко'
пии сигнала в этом случае используется явление накопления заряда
в ловушках на поверхности полупроводника в диодах Шотки. Время
хранения записанной информации в устройствах на диодах Шотки
составляет около 50 мс. Использование для запоминания сигнала
p'n диодов, выполненных на подложке кремния, позволяет увели'
чить это время до 1с и более.
Инвертор сигнала. В корреляторе на МЛЗ с внешними нелиней'
ными элементами можно получить инвертированный сигнал, т. е. из
сигнала s(t) получить сигнал s(–t).
На рис.7.5 приведена схема инвертора такого типа. В схеме ис'
пользуется двухканальная МЛЗ с m преобразователями, причем вре'
менная дискретность отводов отличается в каждом канале МЛЗ в два
раза. Преобразователи в двух каналах МЛЗ с одинаковыми номера'
ми связаны только электрически. Входной импульс s1(t,f1), длитель'
ностью T, имеет пространственную протяженность L. Длина одного
преобразователя немного меньше D / 2, где D – расстояние между
преобразователями в верхнем канале. В нижнем канале расстояние
между преобразователями равно D / 2. Число преобразователей в
одном канале m = 2T / D.
Длительность сигнала s2(t,f2) должна быть меньше, чем величи'
на, обратная полосе частот одного ВШП в нижнем канале. Такая
161
L=T/ V
m
S1 (t, f1)
S2 (t, f2)
D
2
1
k1
k2
S3 (–t,f3 )
D/2
f 3= f2 – f1
Рис. 7.5. Конструкция инвертора на двух МЛЗ
t=t5
S (t, f1 )
1
t
t=t3
t
t=t2
t
t=t1
t
S1 (t, f 1)
k1
S (t ,f )
k2
2
2
S (t ,f )
2
t
t=t4
2
t = t1
t
t = t2
t
t = t3
t
t=t4
t
t=t5
t
Рис. 7.6. Прохождение сигналов s1(t,f1) и s2(t,f2) через конвольвер,
используемый как инвертор
162
конструкция устройства позволяет радиосигналу s2(t,f2) малой дли'
тельности, распространяющемуся по МЛЗ с меньшей дискретностью
отводов, «опрашивать» сначала конец, а потом начало сигнала
s1(t,f1) длительностью T = L / V . Временные диаграммы расположе'
ния сигналов s1(t,f1) и s2(t,f2) в различные моменты времени показа'
ны на рис. 7.6. «Опрашиваемая» сигналом s1(t,f1) часть сигнала
s2(t,f2) в различные моменты времени на рис. 7.6 заштрихована.
В результате нелинейного взаимодействия двух сигналов, снима'
емых с ВШП верхнего и нижнего каналов и подаваемых на внешние
диоды, на выходе образуется инвертированный сигнал разностной
частоты S3 (−t, f3 ) при f3 = f1 − f2 .
Основным достоинством МЛЗ с внешней нелинейностью является
более высокий коэффициент нелинейного преобразования. Вносимые
потери в этих устройствах не превышают 40 дБ.
7.6. Конвольвер как согласованный фильтр
Поскольку конвольвер работает фактически как линейный
фильтр, «импульсная характеристика» которого задается с помощью
опорного сигнала, то его можно использовать в качестве согласован'
ного фильтра. Так, конвольвер совместно с источником опорного сиг'
нала может заменять согласованный фильтр в приемнике широко'
полосной системы связи. В случае такого применения опорный сиг'
нал должен совпадать с обращенным во времени идеальным вход'
ным сигналом (для одного символа).
Следует отметить, что конвольвер позволяет произвольно изме'
нять систему кодирования, а также при необходимости изменять
полосу рабочих частот и центральную частоту. Таким образом, кон'
вольвер является высокопрограммируемым устройством.
На рис. 7.7 в качестве иллюстрации приведена осциллограмма
сигнала на выходе вырожденного акустического конвольвера, подоб'
ного тому, который показан на рис. 7.1, а. Центральная частота вход'
ных сигналов равна 110 МГц, длительность взаимодействия волн в
параметрической области составляет 4,6 мкс. Оба входных сигнала
представляют собой прямоугольные радиоимпульсы длительностью
4,6 мкс. Огибающая выходного сигнала имеет треугольную форму,
что является результатом свертки прямоугольного импульса с са'
мим собой, частота несущей равна 220 МГц. Выходной сигнал исче'
зает при отсутствии одного из входных сигналов.
Осциллограмма на рис. 7.8 снята для случая, когда один из вход'
ных сигналов представляет собой ФКМ'сигнал, закодированный
163
121
1233 456
12441
17 3456
Рис. 7.7. Сигнал на выходе вырожденного акустического конвольвера,
имеющего структуру, показанную на рис.7.1,а для случая, когда входA
ные сигналы конвольвера представляют собой радиоимпульсы
с прямоугольной огибающей
1 мкс/дел
2
100 мВ/дел
3
1
Рис. 7.8. Сигнал на выходе вырожденного акустического конвольвера
(1), имеющего структуру, показанную на рис.7.1, а для случая, когда
входные сигналы конвольвера представляют собой ФКМAсигналы,
кодированные в соответствии с 13Aпозиционным кодом Баркера (2)
и его обращенной во времени копией (3)
164
в соответствии с 13'позиционным кодом Баркера 0101001100000, а
другой входной сигнал является его обращенной во времени копией.
Частота несущей входных сигналов равна 110 МГц.
В верхней части рис. 7.8 показана осциллограмма двоичного ко'
дирующего сигнала и его обращенная во времени копия.
Выходной сигнал конвольвера имеет по шесть боковых лепестков
примерно одинаковой амплитуды, расположенных с каждой сторо'
ны от главного лепестка, амплитуда которого примерно в 13 раз пре'
вышает амплитуду боковых лепестков. Можно видеть, что форма
выходного сигнала конвольвера очень близка к идеальной.
165
Библиографический список
1. Морган Д. Устройства обработки сигналов на поверхностных
акустических волнах: Пер. с англ. М.: Радио и связь, 1990. 416 с.
2. Фильтры на поверхностных акустических волнах (расчет,
технология и применение): Пер. с англ. / Под ред. Г. Мэттьюза.
М.: Радио и связь, 1981. 472 с.
3. Кайно Г. Акустические волны. Устройства, визуализация и
аналоговая обработка сигналов. М.: Мир. 1990. 665 с.
4. Функциональные устройства обработки сигналов (основы те'
ории и алгоритмы): Учеб. пособие для вузов / Под ред. Ю. В. Егоро!
ва. М.: Радио и связь, 1997. 288 с.
5. Каринский С. С. Устройства обработки сигналов на ультразву'
ковых поверхностных волнах. М.: Советское радио, 1975. 176 с.
6. Орлов В. С., Бондаренко В. С. Фильтры на поверхностных
акустических волнах. М.: Радио и связь, 1984. 272 с.
7. Кук Ч., Бернфельд М. Радиолокационные сигналы. М.: Совет'
ское радио, 1971. 568 с.
8. Речицкий В. И. Радиокомпоненты на поверхностных акусти'
ческих волнах. М.: Радио и связь, 1984. 112 с.
9. Акустические кристаллы / Под ред. М. П. Шаскольской. М.:
Наука, 1982. 632 с.
10. Балышева О. Л. Материалы для акустоэлектронных устройств:
Учеб. пособие / СПбГУАП. СПб., 2005. 53 с.
11. Щука А. А. Электроника: Учеб. пособие / Под ред. А. С. Сиго!
ва. СПб.: БХВ'Петербург, 2005. 800 с.
12. Щука А. А. Функциональная электроника: Учебник для ву'
зов. М.: МИРЭА, 1998. 259 с.
166
ОГЛАВЛЕНИЕ
Введение .........................................................................
Глава 1. Основные типы акустоэлектронных устройств ..........
1.1. Линии задержки ......................................................
1.2. Полосовые фильтры на ПАВ .......................................
1.3. Резонаторы на ПАВ ..................................................
1.4. Устройства формирования и сжатия сложных сигналов
на ПАВ ...................................................................
Глава 2. Акустические волны в упругих твердых телах ..........
2.1. Основные определения ..............................................
2.2. Основные уравнения для пьезоэлектрических
(анизотропных) материалов ........................................
2.3. Акустические волны в изотропных материалах ..............
2.3.1. Плоские волны в неограниченном изотропном
упругом теле ...................................................
2.3.2. Рэлеевские волны в изотропном полупространстве .
2.4. Волны в анизотропных средах ....................................
2.4.1. Плоские волны в неограниченной анизотропной
среде .............................................................
2.4.2. Волны в пьезоэлектрическом полупространстве .....
2.4.3. Типы волн в анизотропных однородных средах .....
Глава 3. Методы расчета устройств на ПАВ ..........................
3.1. Возбуждение ПАВ ....................................................
3.2. Функция Грина пьезоэлектрического полупространства ...
3.3. Входная проводимость преобразователя в приближении
слабых отражений от электродов .................................
3.3.1. Однородный преобразователь .............................
3.3.2. Неоднородный преобразователь ..........................
3.4. Проектирование устройств на ПАВ ..............................
3.5. Отражательные структуры для устройств на ПАВ ...........
3.5.1. Отражательные элементы .................................
3.5.2. Отражательные структуры ................................
3.6. Подавление отраженных волн в преобразователях ..........
3.7. Расчет устройств на ПАВ на основе уравнений связанных
волн .......................................................................
Глава 4. Фильтры на ПАВ .................................................
4.1. Резонансные фильтры на ПАВ ....................................
4.1.1. Лестничные фильтры на основе резонаторов на ПАВ
4.1.2. Выбор параметров резонаторов на ПАВ ................
4.1.3. Резонансный фильтр, использующий
продольные типы колебаний ..............................
4.1.4. Фильтры на акустически связанных волноводных
модах в резонаторах на ПАВ ..............................
4.2. Трансверсальные фильтры на ПАВ ..............................
4.2.1. Фильтры с аподизацией sinc(x) ..........................
4.2.2. Конструкции трансверсальных фильтров .............
3
7
7
14
17
19
24
24
26
29
29
30
35
35
36
38
43
44
45
48
50
50
52
57
57
60
64
66
73
73
74
80
82
87
91
93
96
167
Глава 5. Многополосковый ответвитель и устройства
на его основе .......................................................
5.1. Принцип работы МПО ...............................................
5.2. Частотные характеристики МПО .................................
5.3. ПАВ' устройства на основе МПО .................................
5.3.1. Трансверсальный фильтр на основе МПО с полной
передачей мощности .........................................
5.3.2. Однонаправленный преобразователь на основе МПО
5.3.3. Многополосковое «зеркало» для одновходовой
линии задержки ..............................................
5.3.4. Многополосковое «зеркало» для линии задержки с
раздельными входом и выходом. .........................
5.3.5. МПО с уменьшением апертуры акустического луча
для акустоэлектронного конвольвера ..................
Глава 6. Устройства формирования и сжатия
сложных сигналов на ПАВ ...................................
6.1. Основные соотношения и принцип работы устройств
формирования и сжатия ФКМ'сигналов ......................
6.2. Свойства кодов ......................................................
6.3. Устройства формирования и сжатия ЛЧМ'сигналов .....
6.4. Принцип работы РЛС со сжатием импульса ................
6.5. Конструкции дисперсионных фильтров на ПАВ ...........
6.6. Характеристики ЧМ'сигналов ..................................
6.7. Основные характеристики ЛЧМ'сигнала ....................
6.8. Сжатие ЛЧМ'сигнала ..............................................
6.9. Типы весовых функций ...........................................
6.10. Проектирование дисперсионных фильтров на ВШП .......
6.11. Проектирование дисперсионных фильтров на
отражатель ных структурах .....................................
Глава 7. Устройства корреляционной обработки
сигналов на ПАВ .................................................
7.1. Нелинейные взаимодействия в упругой среде .................
7.2. Коррелятор с внутренней нелинейностью ......................
7.3. Рабочие характеристики коррелятора ..........................
7.4. Волноводный конвольвер ...........................................
7.5. Корреляторы с внешней нелинейностью ........................
7.6. Конвольвер как согласованный фильтр ........................
Библиографический список ................................................
168
99
99
101
107
107
108
111
112
113
116
116
119
123
124
130
130
132
133
137
141
144
151
151
152
156
158
160
163
166
169
В. Ф. Дмитриев
УСТРОЙСТВА
ИНТЕГРАЛЬНОЙ ЭЛЕКТРОНИКИ
АКУСТОЭЛЕКТРОНИКА
ОСНОВЫ ТЕОРИИ,
РАСЧЕТА И ПРОЕКТИРОВАНИЯ