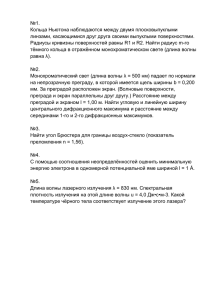
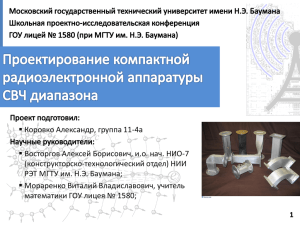
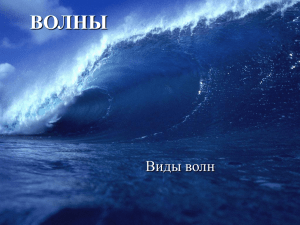
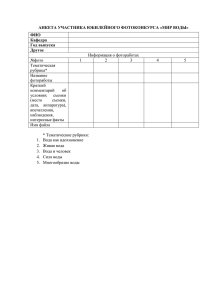
Разработка программных продуктов преобразования радиолокационного изображения в картографические. Данная статья посвящена обзору радиолокационных изображений. А также тому, как преобразовывать обычные фотографии в ортофотоснимки. Кроме того, она содержит в себе краткий пояснение о радиолокации как таковой. Радиолокация Радиолокация - область науки и техники, объединяющая методы и средства локации (обнаружения и измерения координат) и определения свойств различных объектов с помощью радиоволн. Суть радиолокации можно проще всего объяснить на примере звукового локатора. Допустим у нас есть человек, назовем его оператором, который имеет при себе секундомер. Если оператор в большой пустой комнате, стоя у одной из стен, крикнет в противоположную, то через некоторое количество времени услышит эхо. В данном случае эхо – это отразившаяся от противоположной стены звуковая волна. Таким образом, зная направление, скорость звука в данной среде, а также время между моментами, когда оператор издал звук и принял его, то можно с некоторой точностью определить координаты исследуемого объекта в пространстве. Модифицировать данный «комплекс» можно посредством того, что выдать оператору два рупора: один для того, чтобы в него кричать, а другой – слушать. Таким образом мы не только сможем более точно выбирать направление для нашего сигнала, но и защитим наше устройство от посторонних звуков, приходящих с других направлений. Кроме того, мы можем поместить нашего оператора на вращающеюся площадку, и, таким образом, сканировать все окружающее пространство. В итоге мы получили простейший обзорный звуковой радар. Проблема звуковых волн состоит в их небольшой дальности распространения. Более подходящими для зондирования (сканирования) пространства являются радиоволны. Радиоволны – это электромагнитные волны с частотами от 0,03 ГГц до 3 ТГц, что соответствует длине волны от 10 млн. километров до 0,1 мм. Как можно увидеть выше, радиоволны бывают разными, и, соответственно, в зависимости от длинны волны они обладают различными свойствами и характеристиками. Первая характеристика, о которой стоит упомянуть, – это дальность распространения. Так как любая реальная волна обладает свойством затухать со временем, то и дальность распространения этой волны не бесконечная. Идея заключается в том, что при примерно одном и том же коэффициенте затухания для радиоволн и одном и том же количестве колебаний, в зависимости от длинны волны, различные волны будут распространяться на разные расстояния. Существует, крайне условно, прямая корреляция между длинно волны и дальностью распространения. Поэтому, допустим, волны декаметрового диапазона могут распространяться на тысячи километров, а миллиметрового – на сотни метров. Также стоит упомянуть, что когда радиоволна попадает в какой-либо предмет, то она частично поглощается и частично отражается в различные стороны. В случае с локацией нас интересует та волна, которая отразится назад к источнику. Проблема в том, что волна, попав в объект отражается в различные стороны, а не в одну. Обычно нужная нам отраженная волна имеет мощность в тысячи раз меньше, чем та, которую мы послали из источника. Соответственно, эта первичная волна должна иметь достаточно энергии, для того чтобы отразившаяся менее мощная волна «долетела» назад до приемника, иначе мы просто не поймем, что в той стороне находится некоторый объект. Вторая характеристика, о которой также стоит упомянуть, – точность определения сигнатуры цели. Суть заключается в том, что волна, попав в не радиопрозрачную плоскость перпендикулярную лучу частично отразится обратно, но, попав в наклонную плоскость, то волна не отразится обратно к источнику. Таким образом, на экране радара наклонная плоскость будет не видна, так как приемник не получил отраженного сигнала. Так как реальные летательные объекты – это множество плоскостей, то сигнатура объекта на радаре определяется суммой плоскостей летательного объекта, которые в данный конкретный момент направлены перпендикулярно к источнику. В принципе, это и есть основной метод расчета радиолокационной сигнатуры объекта. Данная характеристика летательного объекта называется «эффективная поверхность рассеивания» (сокращенно ЭПР). Исходя из вышесказанного, можно сделать вывод о том, что ЭПР будет меняться в зависимости от направления облучения объекта. То есть, имея базу данных по ЭПР какого-то количества летательных объектов с разных направлений, можно сравнивать полученные ЭПР на радаре с данными об ЭПР для данного направления облучения в базе данных. Таким образом, можно с определенной точностью классифицировать объект, иначе говоря, решить задачу не только обнаружения объекта посредством радиолокации, но и идентификации, которую обычно решают посредством косвенных факторов: скорость объекта, высота полета, количество объектов, направление полета, наличие или отсутствие излучения и т.д. Однако, в зависимости от длинны волны, точность определения ЭПР будет, крайне условно, обратно пропорциональна длине волны зондирующего сигнала. То есть миллиметровый радар с гораздо большей эффективностью определит размеры объекта, а также его ЭПР, нежели метровый радар, который может обнаружить просто «облако», а что конкретно в этом «облаке» находится (группа объектов или одиночный, пассивная помеха или реальный объект и т.д.) радар определить не способен. Однако, стоит упомянуть тот факт, что чем больше длина волны по сравнению с линейными размерами облучаемой цели, тем меньше сигнал подвержен эффекту «наклонных плоскостей», таким образом, как бы не «поворачивал» летательный объект, если его размеры значительно меньше длинны волны сигнала, то мы все равно его «увидим», пусть и не зная точной информации об этом объекте. Так как точность определения ЭПР для определенных радаров крайне высока, то с помощью подобных РЛС можно составлять радиолокационные изображения. Радиолокационное изображение – это изображение, полученное с помощью РЛС. Преимуществами радиолокационных изображений перед фотосъемкой является: возможность проводить радиолокационную съемку при любой погоде (в том числе при сильной облачности) и в любое время дня (в том числе ночью); высокая степень детализации за счет высокого пространственного разрешения радарного снимка; выгодная альтернатива GPS-мониторингу смещений на местности. Основная область применения данных снимков лежит в военной сфере, однако радиолокационные изображения также активно применяются в гражданской области. Сегодня инновационная обработка позволяет открывать все более новые направления использования радиолокационной съемки: Особенности радиолокационной съемки, которые позволяют получать радиолокационные снимки вне зависимости от погоды, делают ее настоящим спасением для картографирования районов дальнего востока России и зарубежных стран, где в зимний период мешает снег, а летом сезон дождей и соответственно сплошная облачность на протяжении всего съёмочного сезона. К преимуществам РЛС для картографии стоит также отнести достаточно высокое пространственное разрешение радарных снимков, которое позволяют создавать и обновлять карты вплоть до масштаба 1:50 000. Имея информацию о фазах сигнала радиолокационной съемки можно создавать цифровые модели рельефа и местности путем интерферометрической обработки. Они в свою очередь могут быть использованы во многих направлениях жизнедеятельности общества. Разновременные радиолокационные снимки позволяют получать информацию о смещениях земной поверхности. Это помогает обнаружить понижения при разработке месторождений полезных ископаемых, отклонениях объектов инфраструктуры от нормального положения и отслеживать оползневые процессы Радиолокационная съёмка водных поверхностей позволяет обнаруживать нефтяные разливы. Они из-за особенностей структуры вещества имеют сглаженную поверхность и иную отражательную способность радиолокационной съёмки в отличие от естественной воды. Это позволяет достаточно легко определить нефтяной разлив на радиолокационном снимке. Радиолокационная съемка также даёт возможность найти суда, у которых специально или вследствие аварии отключен сигнал слежения. Сигнал на радиолокационном снимке хорошо отражается от металлических поверхностей и позволяет обнаружить корабли в автоматическом режиме обработки РЛС даже на радарных снимках среднего разрешения. Также важно, что радиолокационные снимки могут быть получены всего через час после съёмки. Данная оперативность позволяет с большей точностью найти судно соответствующим службам. Различная отражательная способность радиолокационной съемки дает возможность обнаруживать гари и вырубки в лесных массивах, а также следить за состоянием сельскохозяйственных посевов. На следующих рисунках ( рисунки 1-2 ) продемонстрированы примеры радиолокационных изображений: Рисунок 1 - Радиолокационное изображение аэропорта Рисунок 2 - Радиолокационное изображение пересеченной местности Технология съемки Радиолокационная съёмка - вид аэрокосмической съёмки, осуществляемой радиолокатором - активным микроволновым датчиком, способным излучать и принимать отражённые от земной поверхности поляризованные радиоволны в определённом диапазоне длин волн (частот). То есть на радиолокационных снимках яркостью закодировано количество отраженного излучения, но не солнечного, как на привычных для нас снимках в видимом диапазоне, а излучения, создаваемого радиолокатором. Радиоволны способны проникать сквозь облака, что позволяет получать радиолокационные изображения вне зависимости от погодных условий. В некоторых случаях возможнополучение отраженного сигнала от объектов, расположенных ниже уровня поверхности, при этом проникающая способность радиосигнала возрастает при увеличении длины волны. Так, на радиолокационных снимках под толщей рыхлых грунтов, например песка, могут быть обнаружены грунтовые воды или некоторые геологические структуры. При зондировании древесной растительности в X-диапазоне отражение происходит от крон деревьев, а при увеличении длины волны - от ветвей и стволов, от почвенного покрова. Поляризация электромагнитной волны определяется ориентацией вектора напряженности электрического поля в плоскости, перпендикулярной направлению распространения волны. Сигнал, посылаемый и принимаемый антенной радиолокатора, поляризован: электрический вектор колеблется, как правило, в одном из двух направлений: горизонтальном H или вертикальном V (иногда при излучении используют круговую поляризацию). Различают поляризацию согласованную, при которой посылаемый и принимаемый сигнал поляризованы одинаково (HH, VV), и перекрёстную (или кроссполяризацию), при которой направления поляризации в посылаемом и принимаемом сигналах взаимно перпендикулярны (HV, VH). Поляризация волны может изменяться по-разному в результате взаимодействия с различными объектами местности, что позволяет выявлять их новые свойства. Особенности геометрических свойств радиолокационных изображений обусловлены наклоном зондирующего луча к поверхности. В процессе полёта спутника по орбите (направление движения носителя радиолокационной системы называют азимутом съёмки) антенна на его борту излучает радиоволны в направлении земной поверхности под углом к ней (направление излучения называют дальностью). Радиолокационное изображение формируется путём регистрации отраженного поверхностью (обратного) сигнала по наклонной дальности (этим термином принято называть расстояние от антенны до поверхности). Съёмку непосредственно под носителем (в надир) не проводят, так как в этом случае дальности различаются незначительно, обратные сигналы от близких объектов местности возвращаются к радиолокатору почти одновременно и на снимке эти объекты неразличимы. Углом съёмки обычно называют угол падения θ (в англоязычной литературе принято использовать термин incidence angle) – это угол между направлением посылаемого радиосигнала и отвесной линией, проведенной через точку, в которую направлен сигнал. Участки снимаемой местности, наименее удалённые от надира, называют ближней зоной, а наиболее удалённые - дальней зоной. Соответствующие им углы падения - θб и θд. В случае наклона зондируемой поверхности выделяют локальный угол падения θл – угол между направлением радиоволны и нормалью к склону. Угол падения волны для современных космических радиолокационных систем может варьировать в больших пределах: например, для Radarsat-2 – от 10° до 60°, для ALOS-2/PALSAR-2 - от 8° до 70°. Весь диапазон углов падения определяет ширину полосы обзора – полосу на земной поверхности, в пределах которой может проводиться съёмка. Более узкая полоса на поверхности Земли, съёмка которой проводится при текущем положении луча, называется полосой захвата. Если исходные радиолокационные изображения представлены в проекции наклонной дальности, то объекты, расположенные ближе к радиолокатору, будут выглядеть более сжатыми по сравнению с объектами, расположенными дальше от него. Для правильного отображения местности изображение из проекции наклонной дальности пересчитывают в проекцию наземной дальности. Пространственное разрешение радиолокационных изображений определяется свойствами антенны и различается в направлении действия антенны (дальности) и в направлении движения спутника (азимута). Разрешение по наклонной дальности ρsr (в направлении, перпендикулярном направлению полёта) пропорционально длительности импульса: чем короче импульс, тем выше разрешение. Оно вычисляется по формуле ρsr=τc/2, где τ - длительность импульса, c - скорость света в вакууме. При работе со снимками значение имеет пространственное разрешение (или размер элемента разрешения) на земной поверхности ρgr, оно определяется через разрешение по наклонной дальности по формуле: ρgr=ρsr/cos(90θ)=ρsr/sinθ, где θ - угол падения волны. Пространственное разрешение радиолокационных изображений по азимуту ρa легко определяется для радиолокаторов бокового обзора (РБО) по формуле ρa=Srdλ/L, где Srd - наклонная дальность до поверхности, λ – длина волны, L – горизонтальный размер реальной антенны. Для таких систем возможности повышения пространственного разрешения ограничиваются размерами антенны. Так, для космических РБО, осуществляющих зондирование в X-диапазоне (λ≈3 см), при размере реальной антенны 10 метров и наклонной дальности в несколько сотен километров разрешение по азимуту будет составлять около 2 км. Наиболее высокое пространственное разрешение обеспечивают радиолокаторы с синтезированной апертурой (РСА). Принцип их работы основан на регистрации и последующей когерентной обработке сигналов, принятых от объекта местности A в процессе движения носителя на участке орбиты, называемом интервалом синтезирования (Lsynt). В общем случае разрешение РСА по азимуту вычисляется по следующей формуле: ρa=Srdλ/2Lsynt. В настоящее время вся радиолокационная съёмка Земли из космоса осуществляется радиолокаторами с синтезированной апертурой. Радиолокационная съёмка Земли ведётся при разных режимах обзора местности: широкозахватном (ScanSAR), маршрутном (StripMap) и прожекторном (SpotLight). Эти режимы отличаются технологией получения изображений, их пространственным охватом и разрешением. При широкозахватном режиме широкую полосу захвата получают путём последовательного переключения импульса в направлении съёмки. В этом режиме полоса захвата может достигать сотен километров, однако пространственное разрешение низкое - десятки и сотни метров. При маршрутном режиме съёмка осуществляется в пределах одной полосы, ширина которой достигает десятков километров. Пространственное разрешение в этом случае достигает нескольких метров. При прожекторном режиме обзора в процессе движения спутника луч антенны многократно направляют в центр снимаемого участка. При этом режиме получают минимальный пространственный охват, но наивысшее пространственное разрешение - до долей метра) (рис. 3). Рисунок 3 - Виды съемки Ортотрансформирование Данный процесс является самым полным и наиболее точным подходом к геометрической коррекции снимков. Изображение, полученное таким образом, называется ортоизображением, или ортофотопланом. Масштаб в пределах такого изображения постоянен во всех направлениях, а дисторсии не превосходят допустимых пределов. Благодаря этому ортофотоплан может быть использован для проведения точных геодезических измерений и изготовления топографических карт, масштабы которых мельче масштаба самого ортофотоплана. Цифровые модели рельефа, наличие которых во многих случаях крайне желательно при ортотрансформировании, как правило, представляют собой регулярную геодезическую координатную сетку (GRID), для каждого узла которой задано значение высоты h.соответствующее высоте рельефа земной поверхности в данной точке, измеренной относительно земного эллипсоида. Достоинствами модели с регулярной сеткой являются ее простота и удобство использования, основным недостатком — в среднем неэффективное расположение точек (не на всех участках требуется одинаковая плотность сетки). Регулярные модели находят применение в тех случаях, когда требуется повышенная точность съемки, например, при проектировании аэродромов. В нерегулярных цифровых моделях точки могут располагаться без какой-либо системы, но с заданной плотностью, обеспечивающей точность рельефа на данном участке не ниже заданной. Связывание точек в единую модель производится с помощью методов триангуляции, наиболее распространенным из которых на сегодня является триангуляция Делоне. Искажения за рельеф местности при ортотрансформировании исправляются за счет того, что каждому элементу цифровой модели рельефа находится эквивалентное положение на снимке. Значение яркости для этого местоположения определяется на основе передискретизации значений ближайших пикселей на основании описанных ранее алгоритмов. Стоит отметить, что даже при работе с данными космической съемки высокого разрешения использование цифровой модели рельефа требуется не всегда. В местностях со слабо изменяющимся рельефом при малых отклонениях камеры от надирного направления рельеф часто не используется либо используется рельеф намного более низкой точности, чем требуется для создания ортофотоплана заданного масштаба. Рисунок 4 - Смещение отметки от элемента поверхности при оптической съемке Так, например, для снимка, снятого в надир с космического аппарата IKONOS (высота орбиты 681 км, поперечный размер кадра 10 км, откуда 6 тах =10/681/2 «0,0073, пространственное разрешение 8/ = 1 м), перепады рельефа в его пределах, не превышающие —160 м, цифровую модель рельефа использовать необязательно, так как искажения, вызванные рельефом, не превышают размеров элемента разрешения. Для аналогичного снимка, снятого по углом 20 ° от надира, величина допустимого размаха значений рельефа упадет примерно до 2,5 м. На первом этапе создания ортофотопланов проводятся подготовительные работы, включающие в себя преобразование (если требуется) исходных данных из специализированных и архивных форматов в форматы используемого программного обеспечения, сбор и анализ имеющихся картографических материалов той местности, на которую строится ортофотоплан, с последующим выводом о необходимости использования цифровой модели рельефа. Если цифровая модель рельефа требуется, то необходимо обеспечить ее наличие. На сегодняшний день существуют общедоступные или условно доступные глобальные цифровые модели местности относительно невысокого разрешения (90-100 м): SRTM, GTOPO30 и др., которые вполне можно использовать при проведении работ, не требующих особо высокой точности. Более точные модели рельефа для конкретной территории получают с помощью цифровых топографических карт или растровых копий обычных карт. Еще одним часто используемым способом получения рельефа является проведение не обычной съемки, а стереоскопической. Следующим шагом при проведении работ по ортотрансформированию является внутреннее и внешнее ориентирование снимков. Для аэрофотосъемки этот процесс требует ввода и автоматизированного расчета значительного количества параметров, описывающих внутреннюю структуру и положение съемочной аппаратуры и земной поверхности в момент съемки. Для космической съемки в оптическом диапазоне внутреннее и внешнее ориентирование проводится чаще всего с помощью метода рациональных функций на основе метаданных снимка, включающих значения RPCкоэффициентов. В этом случае оно, как правило, не требует специальных действий со стороны пользователя. На этапе планово-высотной подготовки производится расстановка опорных и контрольных точек с учетом следующих рекомендаций: — в качестве опорных следует выбирать четкие, однозначно опознающиеся на изображении точки, значения плановых координат которых получены с точностью не хуже 0,1 мм в масштабе создаваемого ортофотоплана, точность абсолютных высот — 30 % от высоты сечения рельефа. Точность абсолютных высот опорных точек должна обеспечивать учет искажений за рельеф местности. Источниками опорных точек могут служить топокарты более крупного, чем создаваемый ортофотоплан, масштаба, материалы аналитической фототриангуляции аэрофотоснимков, геодезические спутниковые измерения и пр.; — количество выбранных опорных точек для построения геометрической модели местности в пределах площади сцены зависит от метода фотограмметрической обработки. Так, для метода RPC-коэффициентов используется, как правило, 5 опорных точек, по возможности эти опорные точки должны находиться в углах и центре снимка, что позволит наиболее точно определить параметры ориентирования сцены. Применение строгой модели позволяет использовать и меньшее количество опорных точек. Так, для снимков IK.ONOS при использовании строгой модели камеры часто достаточно всего одной опорной точки (для устранения систематического сдвига); для снимков всех других систем желательно использовать большее количество точек. При обработке параметрическим способом (только по опорным точкам) количество точек должно быть достаточно большим (несколько десятков на кадр), при этом точность полученного ортофотоплана все равно оказывается ниже, чем при использовании модели камеры. Вне зависимости от используемого метода ортотрансформирования помимо опорных точек устанавливаются также и контрольные точки. Их координаты не участвуют в расчетах элементов моделей или формул преобразования, однако по ним впоследствии можно оценить корректность ортотрансформирования. На этапе собственно ортотрансформирования формируется новое изображение в ортогональной проекции. Пересчет элементов растра осуществляется с помощью одного из ранее указанных методов. Пример окна настройки параметров ортотрансформирования космического снимка IKONOS по методу RPC-коэффициентов без указания наземных опорных точек в ПК ENVI приведен на рис 5. Для сформированного ортофотоплана необходимо провести оценку точности. Контроль планового положения опорных и контрольных точек выполняется по разностям плановых координат изображений этих точек на ортофотоплане и их истинных значений из каталога с использованием следующих соотношений: Рисунок 5 Окно ПК ENVI для настройки параметров ортотрансформирования снимков IK.ONOS на основе метода RPCкоэффициентов без использования наземных опорных точек На каждую опорную и контрольную точку выполняется тщательное наведение с последующей ее регистрацией. В соответствии с принятыми в России инструкциями по проведению фотограмметрических работ величины погрешностей в плановом положении опорных точек не должны превышать 0,2 мм в масштабе карты, контрольных — 0,3 мм. Для 10 % опорных точек допускается расхождение в 0,4 мм в масштабе карты, для 10 % контрольных точек — 0,6 мм в масштабе карты. Ортотрансформирование РЛИ имеет свои особенности. Во-первых, характер смещений элементов рельефа на РЛИ отличается от того, что имеет место в съемке оптического диапазона, поэтому их обработка должна осуществляться специализированными программными пакетами либо специализированными функциями. Так, для пакета ENVI мощные функции по ортотрансформированию РЛИ с учетом рельефа заложены в расширении SARscape, который интерферометрической предназначен, обработки в первую радиолокационных очередь, для изображений, результатом которой является ЦМР, и часто полученную модель можно использовать для ортотрансформирования исходных изображений. Заключение В данной обзорной статье была дана краткая информация о том, что такое радиолокация, радиолокационные изображения и технологии съемки. Также была предоставлена информация по ортотрансформированю, а также ортотрансформированию РЛИ.